
Submitted:
05 August 2016
Posted:
05 August 2016
You are already at the latest version
Abstract
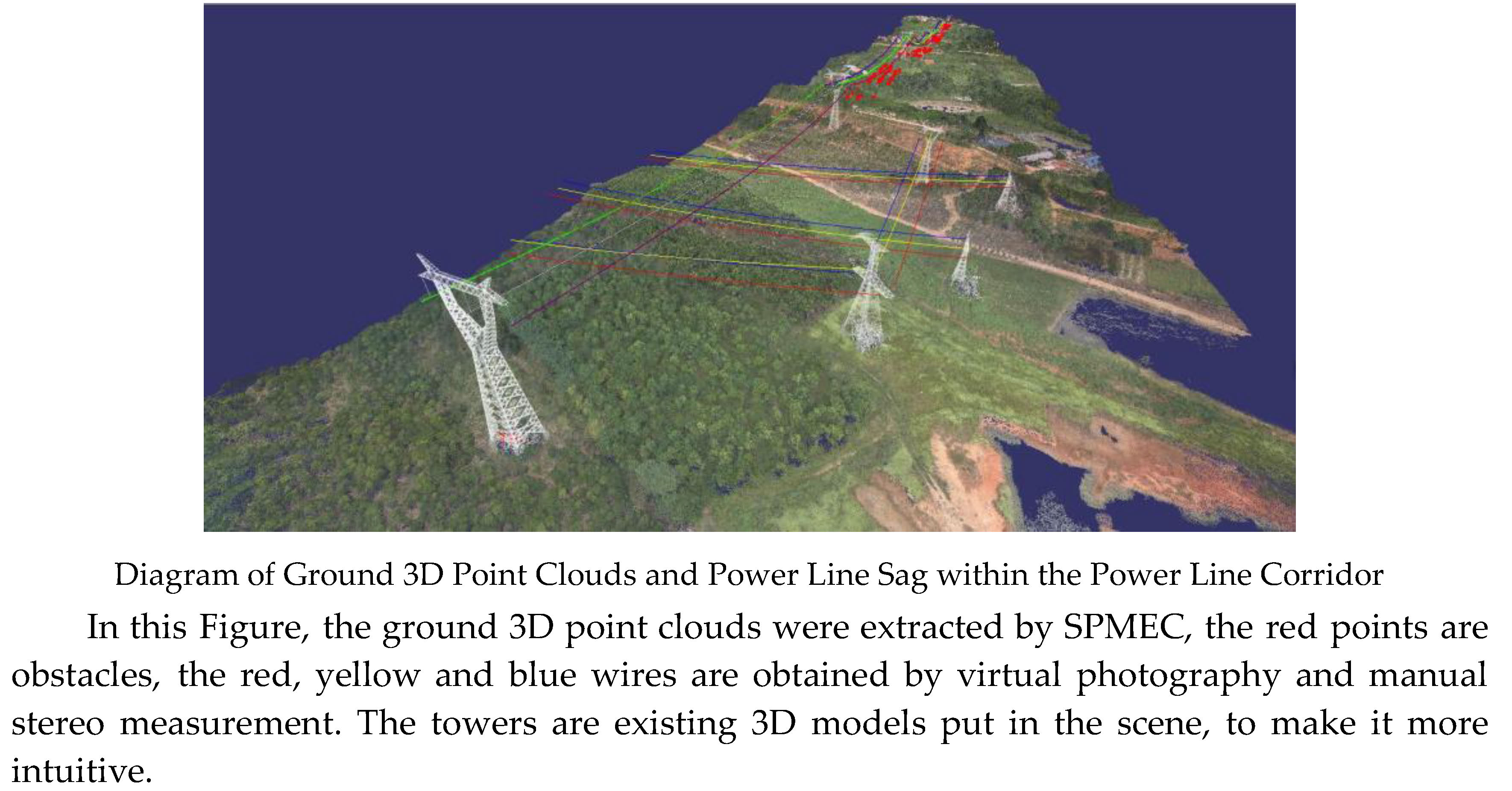
When the distance between an obstacle and a power line is less than the discharge distance, a discharge arc can be generated, resulting in interruption of power supplies. Therefore, regular safety inspections are necessary to ensure safe operations of power grids. Tall vegetation and buildings are the key factors threatening the safe operation of extra high voltage transmission lines within a power line corridor. Manual or LiDAR based-inspections are time consuming and expensive. To make safety inspections more efficient and flexible, a low-altitude unmanned aerial vehicle remote-sensing platform equipped with optical digital camera was used to inspect power line corridors. We propose a semi-patch matching algorithm based on epipolar constraints using both correlation coefficient and the shape of its curve to extract three dimensional (3D) point clouds for a power line corridor. Virtual photography was used to transform the power line direction from approximately parallel to the epipolar line to approximately perpendicular to epipolar line to improve power line measurement accuracy. The distance between the power lines and the 3D point cloud is taken as a criterion for locating obstacles within the power line corridor automatically. Experimental results show that our proposed method is a reliable, cost effective and applicable way for practical power line inspection, and can locate obstacles within the power line corridor with measurement accuracies better than ±0.5 m.
Keywords:
UAV remote sensing
; power line inspection
; dense matching
; virtual photography
; automatic detection of obstacles in power line corridor
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



