
Submitted:
23 March 2017
Posted:
23 March 2017
You are already at the latest version
Abstract
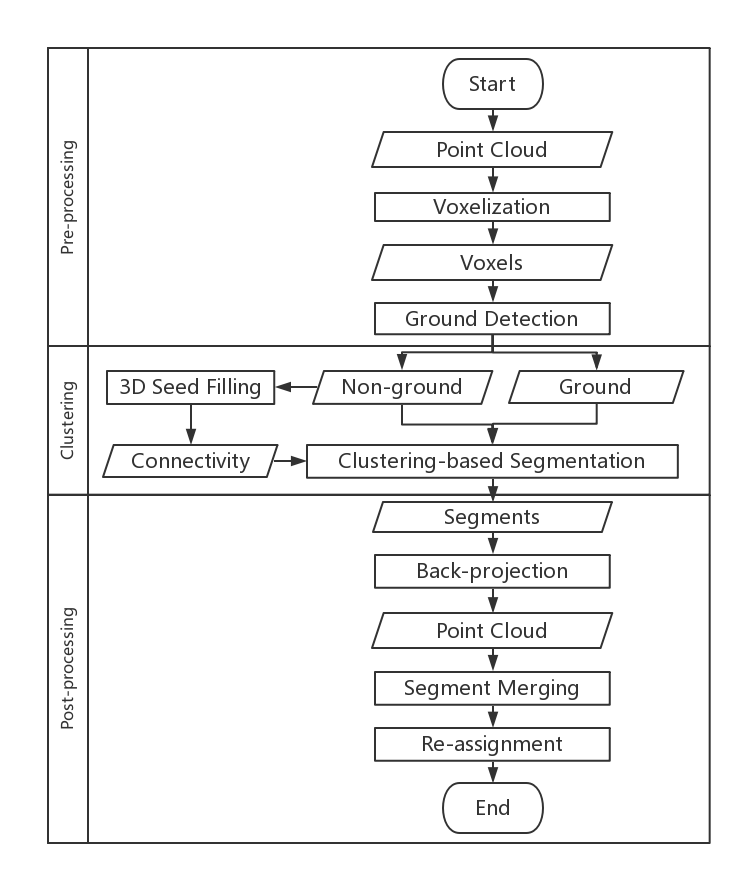
The segmentation of urban scene mobile laser scanning (MLS) data into meaningful street objects is a great challenge due to the scene complexity of street environments, especially in the vicinity of street objects such as poles and trees. This paper proposes a three-stage method for the segmentation of urban MLS data at the object level. The original unorganized point cloud is first voxelized, and all information needed is stored in the voxels. These voxels are then classified as ground and non-ground voxels. In the second stage, the whole scene is segmented into clusters by applying a density-based clustering method based on two key parameters: local density and minimum distance. In the third stage, a merging step and a re-assignment processing step are applied to address the over-segmentation problem and noise points, respectively. We tested the effectiveness of the proposed methods on two urban MLS datasets. The overall accuracies of the segmentation results for the two test sites are 98.3% and 97%, thereby validating the effectiveness of the proposed method.
Keywords:
mobile laser scanning
; voxel
; clustering
; segmentation
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



