
Submitted:
19 July 2019
Posted:
23 July 2019
You are already at the latest version
Abstract
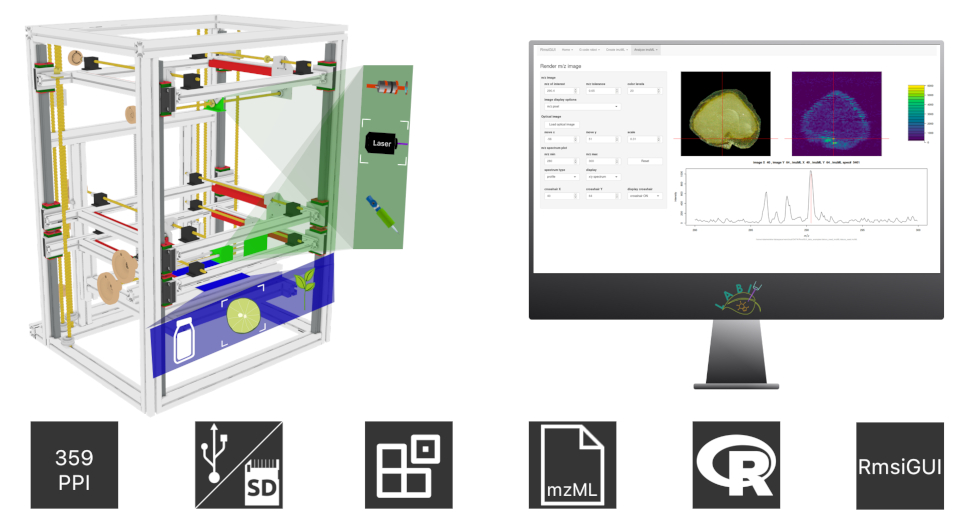
Abstract: Mass spectrometry research laboratories reported multiple probes for ambient ionization in the last years. Combining them with a mechanical moving stage enables automated sampling and imaging applications. We developed a robotic platform, which is based on RepRap 3D-printer components, and therefore easy to reproduce and to adopt for custom prototypes. The minimal step width of the Open LabBot is 12.5 μm, and the sampling dimensions (x, y, z) are 18 × 15 × 20 cm. Adjustable rails in an aluminium frame construction facilitate the mounting of additional parts such as sensors, probes, or optical components. The Open LabBot uses industry-standard G-code for its control. The simple syntax facilitates the programming of the movement. We developed two programs: 1) LABI-Imaging, for direct control via a USB connection and the synchronization with MS data acquisition. 2) RmsiGUI, which integrates all steps of mass spectrometry imaging: The creation of G-code for robot control, the assembly of imzML files from raw data and the analysis of imzML files. We proved the functionality of the system by the automated sampling and classification of essential oils with a PlasmaChip probe. Further, we performed an ambient ionization mass spectrometry imaging (AIMSI) experiment of a lime slice with laser desorption low-temperature plasma (LD-LTP) ionization, demonstrating the integration of the complete workflow in RmsiGUI. The design of the Open LabBot and the software are released under open licenses to promote their use and adoption in the instrument developers’ community.
Keywords:
ambient ionization
; mass spectrometry
; high-throughput sampling
; imaging
; modular robot
; open hardware
; lab automation
; peer production
; open software
; low-temperature plasma
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



