
Submitted:
28 March 2023
Posted:
29 March 2023
You are already at the latest version
Abstract
The application of movement-detection sensors is crucial for understanding surface movement and tectonic activities. The development of modern sensors has been instrumental in earthquake monitoring, prediction, early warning, emergency commanding and communication, search and rescue, and life detection. There are numerous sensors currently being utilized in earthquake engineering and science. It is essential to review their mechanisms and working principles thoroughly. Hence, we have attempted to review the development and application of these sensors by classifying them based on the timeline of earthquakes, physical or chemical mechanisms of sensors, and location of sensor platforms. In this study, we analyzed all available sensor platforms that have been widely used in recent years, with satellites and UAVs being among the most used. The findings of our study will be useful for future earthquake response and relief efforts, as well as research aimed at reducing earthquake disaster risks.
Keywords:
sensors
; earthquake DRR
; monitoring
; early warning
; search and rescue
1. Introduction
In the early hours (4:17 am local time) of 6 February, a 7.8-magnitude earthquake struck southeastern Türkiye and some parts of Syria. About nine hours later, a 7.5-magnitude earthquake along with more than 200 aftershocks took the lives of at least 55,000 people and injured more than 100,000 [1]. United Nations Development Programme (UNDP) estimated that 1.5 million people in Türkiye lost their homes and nearly 500,000 houses have to be rebuilt. The earthquake is one of the major natural hazards to destroy the lives and properties where more than 522 major earthquakes occurred in the 21st century killing more than 430,000 people worldwide [2]. The earthquake phenomenon is sudden, and people cannot organize effective action in a short time because the seismic wave is transmitted to a (Allen & Melgar, 2019) certain point spread instantaneously destroying house and critical infrastructures. Seismic waves are divided into three types according to their mode of propagation: P-wave, S-wave, and surface wave. P-wave travels in the earth’s crust at a speed of 5.5~7 km/s. It makes the ground vibrate up and down and is less destructive. S-wave propagates in the earth’s crust at a speed of 3.2 ~ 4.0 km/s [3]. Surface waves (R and L waves) are mixed wave generated by P-wave and S-wave which meet at the surface. Their large wavelengths and strong amplitudes are the main factors that cause strong damage to the infrastructures. Despite numerous efforts to develop earthquake prediction technology, it is still in the initial stage and remains a challenging area of research [4]. Therefore, it is difficult to provide imminent prediction for most earthquakes so as prompt rescue. The experiences during the emergency management after a major earthquake have shown that the first 3 days or so after an earthquake are very critical for the smooth operation of rescue and relief. So, the first 72 hours after an earthquake are often referred to as the "golden hours" for rescue. After three days, the chances of survival decrease significantly due to dehydration, lack of food, and exposure to the elements. For example, the 1999 Izmit earthquake in Türkiye was one of the deadliest earthquakes in recent history, with over 17,000 people killed and many more injured. During the first 72 hours after the earthquake, search and rescue teams from around the world worked together to locate and save survivors [5]. Many of those rescued during this time had been trapped in small spaces without access to food, water, medical attention, and other essential resources. Similar situation happened in 2015 Nepal earthquake where thousands of people were buried under collapsed buildings and rubble [6]. In the first 72 hours, rescue teams from around the world worked tirelessly to pull survivors from the wreckage [7]. Many of those saved during this time were found trapped under rubble in remote areas that were difficult to access.
2. Classification of Sensors in Earthquake
2.1. Classification Based on Application Time
The classification of sensors in earthquake is largely based on their such as seismic monitoring for long-term use, earthquake early warning, life detection during rescue, and network support that provide information support. This study has classified the whole process of sensors according to their application time and principles. The common life-detection sensors primarily use visible light and infrared detection equipment to record vibration signals for detecting the position of trapped individuals. To obtain accurate life signals, most of these sensors are located on the ground to provide a close exploration perspective and avoid interference from background noise. The airborne radar electro-optical composite life-detection system DN-UAV realizes two life-detection methods, namely, landing detection and hover detection, through the UAV platform to obtain the position information and field environment of buried personnel in ruins. Earthquake early-warning sensors typically require long-term detection to provide continuous earthquake early-warning functions. The principle involves detecting sound, vibration signals, gravity, and other factors to detect the buried depth, morphology, and distribution rules of different elastic formation interfaces. The radon meter measures the concentration of radon in the air and dose rate to obtain seismic signals. Communication-support sensors transmit seismic information through radio signals, with their application scenarios mainly located in space. For instance, the transmission between ground communication systems or the use of artificial earth satellites as relay stations to forward radio waves. Table 1 provides detailed information regarding the application type, time, and theory.
2.2. Classification Based on Wavelength Used by the Sensor
The wavelength of sensors varies significantly depending on their functions. For instance, earthquake early-warning sensors typically operate in the range of 0.1 to 106 meters, while the frequency range of seismic monitoring sensors is generally between10-3~102 meters. Communication support mainly transmits signals through radio, with the frequency range being 106~1012 meters (as shown in Figure 1). Life-detection sensors employ various technologies, including infrared detection, visible light detection, sound signals, and radiofrequency technology, among others. The frequency range of movement-detection sensors, such as seismographs, is usually divided into several categories:
- Long-period seismograph: This type of seismograph is typically considered to have an inherent period of more than 20 seconds. The recorded long-period seismic waves can be used to observe seismic surface waves, study the internal structure of the crust, and determine seismic parameters. The ultra-long period seismograph is used to record the free oscillations of the Earth, i.e., gravity detector [9].
- Wide-band seismograph: The frequency range of wide-band seismographs ranges from the low-frequency end of 0.03 to 0.05 Hz (20-30 s) to above 20 Hz. Wide-band seismographs can provide comprehensive information on crustal movements worldwide, such as two-way radio and short-wave communications [10].
- Very wide-band seismograph: This type of seismograph has a wavelength range of 0.01 to 0.03 Hz (30-100 s) to above 20 Hz, such as microwave communications [11].
- Ultra-broadband band seismograph: The low-frequency end of this seismograph is less than 0.01 Hz (100 s), and the high-frequency end is above 20 Hz, such as satellite communications.
3. Classification Based on Function
3.1. Life Detection Sensors
Life-detection sensors are used to collect physiological, physical, and chemical information of trapped survivors to effectively identify their location immediately after a disaster [12]. Based on their principles and types of sensors used, life-detection technologies can be classified into acoustic life detection techniques, optical detection techniques, radar life detection techniques [13], and volatile organic compounds (VOCs) detection techniques [14].
Acoustic life detection technology is used to locate trapped individuals by detecting cries for help, movements, tapping, and even small chest fluctuations during breathing. Passive sensors that receive trapped people’s cries for help and knocking sounds have the advantage that rescue workers can hear these sounds and locate them if they are within the detectable range. However, practical application of this technology requires sufficient experience from operators due to noisy sound at the earthquake site. Recent advancements in sensor technology have enabled the detection of chest fluctuations of a trapped person during breathing by transmitting sound waves and analyzing reflected waves. This approach has become more effective in recent years because acoustic signals can penetrate metal walls and detect stationary people through breathing movements alone without being disturbed by the remains of the victim [15,16].
Optical detection technology includes visible light detection and infrared detection technology. The optical detection technology involves using a small camera equipped with a light source connected by a flexible data transmission line to penetrate the aperture of a collapsed building and avoid moving it. Life detection technology, also known as Snake Eye (SE) life detector [17], can determine the position and living condition of trapped individuals while avoiding secondary collapse. Infrared detection technology uses the infrared characteristics of the human body to distinguish the human body from the surrounding environment. Currently, Unmanned Aerial Vehicles (UAVs) are becoming popular for collecting video information, audio information, infrared information, and other information at the scene of disaster areas synchronously. The collected data is further classified by operating software to analyze the images and audio in the video and determine the location and living state of personnel [18,19,20].
Radar life detection technology is one of the most mature and widely studied life detection technologies at present. It has been used extensively in the 2008 Wenchuan earthquake in Sichuan, China, and in the 2023 Turkey-Syria earthquake. The common radar life detection system is divided into Continuous Wave (CW) and Ultra-Wide Band (UWB) radar lifetime detection systems. CW radar transmits a monophonic continuous wave signal to demodulate the phase change of the reflected wave and obtain the breathing and heart rate of the person. This is because the phase change of the reflected waves is linearly proportional to the displacement of the chest caused by cardiopulmonary activity [21]. The UWB radar life detection system emits pulsed microwave beams on the biological body. The beam reflects the echo pulse according to the circular sequence modulated by biological activity that extracts the parameters of the life signal through the digital signal processing system(Wang et al., 2020). However, due to the radiation effect of electromagnetic waves on the human body and interference caused by simultaneous use of multiple radar life detectors at the earthquake site, radar life detection systems still have some limitations in their use.
Volatile Organic Compounds (VOCs) detection technology refers to identifying characteristic compounds in the exhaled air, blood, and urine of trapped individuals by determining the type and content of VOCs in the environment [24]. Breathing is considered a unique feature that can determine if a trapped individual is still alive [25] by detecting CO2 and O2 levels. Ion Mobility Spectrometry (IMS) and electronic sensors are common VOCs life-detection instruments [26], where IMS separates these volatile organic compounds according to the difference in the drift velocity of the product ions in the inert buffer gas under the influence of an electric field [27]. The electronic sensor (also known as the electronic nose) uses an array of gas sensors to simulate animal olfactory organs to recognize odors [28]. VOCs life detection technology has some limitations, such as interference from dust and other particles at the rescue site, different VOCs of different groups of people (especially the VOCs of people trapped for a period, lack of water and food), and insufficient miniaturization of equipment [29].
3.2. Seismic Monitoring Sensors
Seismic monitoring sensors are essential for measuring abnormal activity and precursor signals of earthquakes. They provide invaluable data on the position, depth, magnitude, onset time of shocks, and source mechanism of earthquakes, both before and after they occur.
Sensors play a crucial role in seismic monitoring and are used in various applications such as mobile gravity monitoring [30], electromagnetic wave signal detection [31], and cross-fault deformation measurement [32]. The first seismic network was established in California, USA in 1929 using Wood-Anderson seismometers [33]
Modern seismic networks typically consist of broadband and strong-motion seismometers. Broadband seismometers have a wide recording capacity ranging from hundreds of seconds to hundreds of hertz. The Southern California Seismic Network (SCSN) is an exemplary seismic network that has grown from7 seismometers in 1929 to over 600 seismometers in 2021 [34]. Each station is now equipped with co-located three-component broadband and strong-motion seismometers.
Mobile gravity monitoring is an effective technique for earthquake prediction and exploration, primarily for two reasons. First, changes in gravity directly reflect crustal deformation and variations in the focus medium during earthquake incubation [35]. Second, seismic activity is intricately linked to the spatial inhomogeneity and temporal discontinuity of gravity change.
Earthquake incubation and occurrence involve multiple stages, starting from stress accumulation to energy release. During the earthquake breeding process, stress builds up in the source, leading to migration of material in the crust and changes in crustal density, which then affect the corresponding surface gravity.
One notable success story comes from China, where a forecast system was developed based on the principle of "A field, a network." This system uses mobile gravity monitoring to predict earthquakes, and has been successful in detecting abnormalities in gravity prior to several significant earthquakes [36]. Gravity monitoring and prediction are foundational for earthquake prevention and disaster reduction efforts. This involves the use of gravity sensors mounted on both ground-based instruments and satellites. By continuously monitoring changes in gravity, researchers can detect patterns and anomalies that may indicate the potential for an earthquake. This information can then be used to inform early warning systems and evacuation plans, potentially saving lives, and minimizing damage.
Several countries have developed earthquake early warning systems using various techniques, including Japan, Mexico, China, and the USA. Among them, the most advanced system is the Japanese REIS earthquake early warning system. REIS can accurately calculate the location and magnitude of an earthquake just 5 seconds after receiving the seismic wave signal. Additionally, it can estimate the source mechanism of the earthquake rupture within approximately 2 minutes [37]. It is important to note that Japan’s ability to develop such an advanced earthquake early warning system is due in large part to its dense seismic station network. In Japan, there is approximately one seismic station every 20 kilometers, which provides the necessary data to accurately calculate earthquake location and magnitude within seconds of receiving the seismic wave signal.
The Shake Alert earthquake early warning system in the United States is comprised of six components, including the station observation system, data transmission system, data processing and alarm center, test and certification platform, information release system, and end-users. When an earthquake occurs, the system’s automatic rapid reporting system takes between 3 to 5 minutes to relay the relevant earthquake information to the appropriate authorities and end-users. This includes location, magnitude, and estimated shaking intensity based on the seismic waves detected by the network of monitoring stations [38].
The earthquake early warning system in Mexico City (SAS) is composed of four main components. (1) There is an earthquake detection system that employs 12 digital seismometers spaced 25 km apart within a 300 km coastal area of Guerrero. Each station is equipped with a microcomputer capable of determining the magnitude of an earthquake within 10 seconds. (3) There is a communication system with a very high frequency (VHF) central radio relay station and three ultra-high frequency (UHF) radio relay stations that transmit seismic information to Mexico City within just 2 seconds. (3) The central control system, located in Mexico City approximately 320 km from the Guerrero Coast area, continuously receives seismic signals and automatically processes them to determine the magnitude and decide whether to issue an alarm. (4) The alarm issuance system issues warnings via commercial radio, and relevant departments are equipped with special receivers where trained personnel are responsible for receiving and coordinating disaster prevention activities [39].
The change of magnetic field can be taken as a precursor of earthquake because the huge accumulations of crustal pressure may change the properties of the rock layer. This phenomenon affects its electrical conductivity and the trapped gas accumulated in the formation will also produce an electric current to affect the geomagnetic activity [40]. Therefore, it is sometimes controversial to regard electromagnetic motion as an earthquake precursor. It is not clear yet, but the reason might be following: 1) the signal is too weak and easily mixed with background noise to distinguish it such as noise from nearby vehicles, or small changes in solar activity that can be mistaken for geological disturbance signals; 2) it is required accurate measurement equipment at a fixed position with enough statistical recordings to resolve reliable signals [41]. A number of researchers have used artificial noise signals for seismic wave velocity monitoring [42]. Artificial seismic noise is usually dominated by high-frequency body waves providing a high spatial resolution. In addition, the location of artificial noise sources is often fixed (e. g., industrial operations) or moves along a fixed trajectory (e. g., trains and cars), which is easy to track and simulate the movement of noise sources [30].
Micro-electromechanical systems (MEMS) are devices or systems that combine microstructures, micro transducers, and micro-actuators with signal processing and control circuits [43]. Nowadays, these are commonly found in smartphones and laptops. These sensors are inexpensive and can be used to construct ultra-dense arrays. Additionally, MEMS sensors are known for their high accuracy, low power consumption, and robustness, which makes them ideal for use in harsh environments [44,45].
Distributed Acoustic Sensing (DAS) is another effective technique to measure strain rate that consists of two parts namely demodulator and sensing fiber optic cable (Figure 2). This fiber optic is deformed by the movement of the earth’s crust that causes the refractive index of the cable changing the phase of the backscattered light. The demodulator can detect seismic activity by analyzing the coherent Rayleigh scattered light phase information of the fiber [46]. Since 2017, DAS has emerged as a novel technology to obtain numerous seismic sensors at a relatively low cost. The concept of DAS was proposed in the 1990s followed by applications in various fields. However, its applicability in earthquake seismology has only begun recently.
Post-earthquake monitoring is being done using audio signals to locate human targets in a hidden way [41,47] and it can be strengthened by using Wi-Fi and Long-Term Evolution (LTE) in future [48]. This sensor is small and monitors the environment in a narrow space by sensing different physical characteristics such as temperature, humidity, pressure and vibration. The collected sensor data is first sent to the monitoring node based on ZigBee technology and then transmitted to the monitoring center together with the monitoring images. The results of physical experiments show that using these wireless sensors, the monitoring center can display the monitoring image of the monitoring area in real time and visualize the collected sensor data [9]. The ongoing research have been using intelligent monitoring algorithms (such as object recognition or intrusion detection) on monitoring nodes to achieve better monitoring performance [49]. Other advancements include optimization of the mechanical design of the monitoring nodes (e. g., miniaturization or lightweight) and the positioning algorithms for the sensor nodes.
3.3. Earthquake Early Warning
The main purpose of the earthquake early warning is to detect earthquakes in the early stage of earthquakes to estimate the seismic intensity of the expected area and warn users before the seismic waves spread to the ground. The occurrence of earthquake is sudden, and it is therefore not possible to predict accurately. However, a few seconds of warning that allows people to escape the building, find proper shelter and move to a safer place inside the building [50]. The Earthquake early warning detect non-destructive seismic waves (P-wave) emitted at the beginning of an earthquake while destructive seismic waves (S-wave) arrive at the surface in several seconds due to relatively slow propagation speed (Figure 3).
A seismic sensor can sense the speed and acceleration signals caused by the ground movement and convert into directly datable electrical signals. The seismic sensors are widely used in in energy exploration, building quality detection and geological detection apart from earthquake [45,51]. The main observation data include temperature, pressure and humidity [52].
Mechanical earthquake early warning is the most widely used earthquake early warning technology based on microelectromechanical technology (MEMS). This technology emphasizes ultra-precision machining with small size characteristics, making it well-suited for large-scale applications due to its low cost and low power consumption [53]. The P-wave sensors are an essential component of earthquake early warning systems as they can detect the first seismic waves generated by an earthquake. Factors that affect the warning time provided by an early warning system include the distance from the epicenter of the earthquake and the speed of data transmission. In regions with dense sensor networks, accurate and timely data from multiple sensors can be captured to minimize warning time. This can provide valuable time for people to take protective measures and reduce the potential damage caused by an earthquake [50]. The electrochemical earthquake early warning technology based on the solution flows relative to the electrode resulting in the corresponding change of the ion concentration gradient generating the electrical output. Therefore, the electrical signal output by the cell changes with the change of the input seismic motion. The transmission of seismic wave signals can cause electrochemical seismic sensors to perform well at low frequencies compared to others. The electrochemical seismic sensors have little sensors have little mechanical noise apart from low power consumption, only a small amount of thermal noise, thus having a high signal/noise ratio and a wide dynamic range [54].
The magnetic fluctuations at low frequency (0.01~10 hz), 10 to 100 Tesla (nT), occur hours or days before the earthquake. This fluctuation can be detected by a sensor composed of composite Metglas-PZT-Metglas sensor of the magnetoelectric (ME) composite material [50]. The composite has two components: a ferromagnetic layer that responds to a magnetic field by generating mechanical strain, and a piezoelectric layer that converts mechanical strain into voltage. This sensor is very small, light and cheap and work at room temperature [8].
The abnormal element detection technology such as radon detection sensor is unique in earthquake early warning system. The content of radon varies with the temperature, pressure and humidity. Radon has a half-life of 3.8 days, so it can be detected shortly after the basement fissure has formed. The rise of radon concentration is a sign of the formation of new basement cracks. The cracks facilitate the flow of groundwater, allowing radon to escape [53].
3.4. Communication Support Sensors
The earthquake can destroy communication channels by collapsing mobile base stations and power lines. At the same time, traffic lines between the disaster area and the outside world can be blocked where the victims of the disaster area cannot communicate with the outer world. This creates a great challenge in search and rescue. A special network service avenues can play a critical role in the first 72 hours after an earthquake where in which conventional communication services are disrupted. These network service category of earthquake relief sensors can be classified into wireless emergency communications and wired emergency communications.
3.4.1. Space Satellite Communications
The communication satellite plays an important role in earthquake rescue because of its large communication range and good communication effect. It can be quickly deployed and opened within a short period of time, and has the working characteristics of mobility and flexibility, strong environmental adaptability, etc. Its communication network covers a large area, is real-time, and receives a lot of unexpected information, which can provide information and communication security services between all levels of command at the earthquake site and complete the earthquake emergency rescue work. Satellite communication is self-contained and has low power requirements, requiring only small generators or solar cells to be provided at the terminal for communication services [55].
3.4.2. Ground-Based Electromagnetic Wave Communication
The ground-based wave communication uses the terrestrial electromagnetic wave that provide services from earthquake relief. This includes shortwave, digital trucking, two-way radio systems, microwave communications, and the radio frequency identification devices (RFID). The most obvious application is maintaining communication among the rescue team personnel on the ground to coordinate their efforts.
1) Short wave
Shortwave waves have strong penetrating ability and can pass through mountains, buildings and other obstacles because it has a wave with a frequency of 3 to 30 MHz [56]. It is commonly used not only for long-distance communication such as maritime, aviation, and overseas communications but also for emergency communications, such as earthquakes, floods and other disaster events. This is instrumental during emergency because of the characteristics of simple equipment and a simple point-to-point communication platform [56].
2)Digital clusters
Digital clusters usually consist of multiple nodes, each of which is a computer, which are connected to each other through a high-speed network. This communication can be dynamic networking and emergency call with data transmission using fax and voice service functions with automatic monitoring and alarm functions, etc. Therefore, it has become an important part of emergency communication and a command and dispatch system [57]. The digital trucking system can meet the command and mobilization of the rescue department in the process of disaster relief because this can relate to satellite positioning and other functions.
3)Two-way radio system
Two-way radio has both transmitting and receiving functions that can be used for long-distance such as maritime and aviation communication because it can understand two-way communication. Users can send and receive communications via radio waves, which are mainly used for the use of walkie-talkies when internet-based system fails [58]. It is very important to organize rescue teams, coordinate operation and communication support for rescuers in the event of a communication breakdown caused by an earthquake.
4) Microwave Communication System
A microwave communication system uses the waves between about 1 mm and 1 m with shorter wavelengths and higher frequencies. Microwave radio waves are highly resistant to interference and can transmit a large amount of information in a limited frequency band. The microwave communication plays a vital role during earthquake emergency because the earthquake can destroy wired transmission networks such as fiber optic communication. Through communication rescue vehicles and other carriers can quickly reach the disaster area and provide communication services. Satellite communication is also kind of microwave communication located in space to achieve microwave relay communication.
5)Radio Frequency Identification Technology (RFID)
It is a non-contact automatic identification technology that identifies information about an item using radio frequency signals without the need for direct contact. RFID systems include readers and tags where a tag is a chip that is implanted or attached to an item and has the function of storing information and the reader is a device that can read the tag information by Radio Frequency signal. It has benefit over bard codes in terms of non-optical proximity communication, information density, and bidirectional communication capability [59]. In the rescue process after an earthquake, rescuers need to find buried survivors as soon as possible. Using life detectors with RFID tags, buried survivors can be found quickly. During the rescue process after an earthquake, rescuers need to coordinate rescue operations to ensure rescue efficiency. The proper use of RFID can strengthen the rescue service collecting information and providing effective information support.
4. Sensor Integration Platform
The integration and effective use of search and rescue technology need some unique platform because these technologies are not solely relying on specific technology. Various platform integrated with different technologies provided significant contribution during earthquake search and rescue. Some of the existing platforms are described below.
4.1. Earthquake Emergency Vehicle
Earthquake emergency vehicles are very important tools during search and rescue following earthquake disasters because they can supply vital instruments and logistics instruments. Different countries have classified earthquake rescue equipment in different classes., such as Rescue trucks, Ambulances, Firetrucks, Mobile command centers, Urban search and rescue vehicles and medical support units et al. For example, in Japan, the "Hyper Rescue" series of vehicles is used for earthquake emergency response. These vehicles are equipped with specialized equipment such as medical supplies, cutting and excavation tools, and communication systems. They can also serve as mobile command centers [60]. In the United States, the Federal Emergency Management Agency (FEMA) uses a variety of earthquake emergency vehicles, including large trucks and trailers that carry generators, communications equipment, and other supplies. The Los Angeles Fire Department operates specialized Urban Search and Rescue (USAR) vehicles, which include cranes, bulldozers, and other heavy machinery [61]. In China, specialized earthquake rescue vehicles called "earthquake rescue vehicles" are used to transport rescue personnel and equipment to disaster areas. These vehicles are equipped with a variety of specialized tools and equipment such as stretchers, oxygen supplies, and search cameras. In Italy, the National Fire Corps operates a fleet of specialized vehicles for earthquake response, including bulldozers, excavators, and cranes. These vehicles are used to clear rubble and debris, and to search for survivors trapped under collapsed buildings. China Earthquake Administration has classified into detection equipment, search equipment, rescue equipment, medical equipment, communication equipment, assessment and information equipment, logistics equipment and rescue vehicles. Based on actual application scenarios and equipment functions, it can be further subdivided into rescue vehicles, forward command vehicles telemedicine consultation vehicles. These emergency vehicles are being modified as per local need for special function.
Rescue vehicles equipped with all kinds of life detectors, toxic and harmful gas detectors, all kinds of communication equipment and basic medical equipment including cardiopulmonary resuscitation machines, stretchers are developed to meet the needs of earthquake disaster site rescue (Figure 4). They can also supply power for other search and rescue equipment. Similarly, the forwards command vehicle serves as an important channel for the collection and sharing of front-line information, providing an information channel for disaster assessment to have effective decision making and on-site resource scheduling. It mainly provides satellite communication, field voice communication, network communication, field network system, short-wave radio and other communication functions. The telemedicine consultation vehicle is used as field medical and health equipment in the earthquake-stricken area where medical resources cannot reach the disaster area. This acts as an online platform and provides support through virtual consultation to the injured people in the hard-hit area.
4.2. Unmanned Vehicle
The unmanned vehicles are very useful in the area where earthquake damaged critical infrastructures and area with toxic gas and plague [62]. These vehicles can reduce the threat of unknown environments to rescuers and emergency workers. The common unmanned devices include drones and mobile robots [63] but drones are the most used in the disaster area [62]. The Unmanned Aerial Vehicle (UAV), drone, can monitor the large area in short period of time. Therefore, drones have become an increasingly popular tool for use in earthquake response and recovery efforts, including search and rescue, damage assessment, mapping, monitoring, infrastructure inspection and delivering aid et al [64]. It was wildly used for providing long term light in the dark evening and communication network on search and rescue sites in the 2023 Türkiye MS 7.8 earthquake. The UAV also can create 3D maps of its surroundings using lasers, which are very useful for mountain environment.
The medical robots are very popular nowadays due to increasing accuracy. They can be divided into urban search and rescue robots, evacuation robots, and on-site diagnosis robots based on their functions. The urban search and rescue (USAR) robot, represented by the serpentine robot, conducts a preliminary exploration of the disaster site and identifies human survivors by examining the video (with audio) [65]. This instrument transmits the location of survivor to a centralized cloud server. It also monitors the relevant air quality in the selected area to determine whether it is safe for rescuers to enter the area [20]. The evacuation robot can be utilized to take out the survivors from the debris. The on-site diagnosis robot can judge the injury condition according to the skin condition of the buried person [66]. However, the earthquake rescue robots are not popular due to the high cost, and it can only be brought to the disaster area by the emergency communication agency after the disaster. Therefore, it is difficult for mobile robots to use robots dedicated for disaster reduction to carry out disaster reduction activities in the initial stage of disaster.
4.3. Base Station
A base station receives and sends signals and forwards them to other terminal equipment. The composition of mobile communication base station mainly includes communication tower, antenna feeder system (antenna, feeder), communication room, main equipment, supporting facilities and equipment (grounding system, power supply system, lightning protection facilities, transmission equipment, transmission lines, air conditioning, alignment frame, lighting and monitoring facilities, fire prevention facilities). It consists of mainly rack, desktop and self-supporting equipment. The main structural forms of communication equipment rooms are reinforced concrete frame structure, brick and concrete structure and color steel plate room. According to the location of the room, the communications tower can be divided into the tower outside the room, the tower room (called independent tower) and roof tower.
The base station can be fixed and mobile. Fixed base stations are stationary and usually located in a specific location such as a roadside cellular base station. On the other hand, mobile base stations that can be moved because they consist of portable base stations and vehicle-mounted base stations. The advantage of mobile base stations is that they can be deployed more easily in emergency situations to provide faster communication support.
The reliable operation of communication network is an important for the effective implementation of earthquake relief and it is also a prerequisite for the rescue teams to start the rescue smoothly. Different large earthquake destroyed communication channels around the globe in recent history. For example, 2004 Indian ocean earthquake and tsunami with magnitude of 9.1 caused damage to communication infrastructure in several countries, including India, Indonesia, and Thailand. The devastating 2010 Haiti earthquake with magnitude of 7.0, caused extensive damage to the country’s communication infrastructure, including the destruction of the National Palace and many government buildings that housed important communication equipment. Communication was severely disrupted for weeks following the earthquake [67]. The Tohoku earthquake and tsunami (2011), which occurred off the coast of Japan, was one of the most powerful earthquakes ever recorded in Japan [7]. It caused widespread damage to communication infrastructure, including undersea cables and satellite systems. This led to major disruptions in internet and phone services. Similarly, according to a report by the Nepal Telecommunications Authority (NTA), a total of 1,299 base transceiver stations (BTS) were damaged or destroyed in the 2015 Gorkha earthquake [65]. In China, according to post-earthquake statistics, a total of 14,896 base stations were damaged in the 2008 Wenchuan earthquake; 724 base stations were interrupted in the 2013 Lushan earthquake; and 385 base stations were interrupted in the 2019 Changning earthquake. After destructive earthquakes, communication networks are affected and damaged to different degrees. For example, during the Wenchuan MS8.0 earthquake in 2008, communication base stations affected by the earthquake were located throughout the ≥ VI intensity zone, and 29,064 base stations (including SCT base stations) were decommissioned and line damaged, resulting in communication interruptions.
The drones were deployed to survey damage and identify places where people trapped in Mw 7.1 Mexico City earthquake. The drones were equipped with thermal cameras to detect body heat under rubble and helped locate survivors in time to save their lives. Similarly, the drones capture high resolution images to access the extent the damage cause by Gorkha earthquake-2015, Nepal [5]. These images also helped to create a high-resolution image for the further geomorphic analysis. A 6.2 Magnitude earthquake hit central Italy in 2016 and drones were quickly deployed to survey the area to identify victims under rubble. The drones were equipped with sensors to detect the sign of live with the help of thermal imaging technology. After series of earthquakes hit Puerto Rico in 2020, drones were used to survey damaged building and infrastructures [68]. The drones provided high-resolution images of damaged structures and buildings that were very useful to make important decision for the local government [69]. In China, the emergency rescuers used the mobile public network base station carried by the aerial emergency communication platform of the drone to provide continuous mobile. The multi-rotor drones provided instant calls, Internet access, and other services 24 hours a day during the Jiuzhaigou valley earthquake, China on August 8, 2017. In addition, mobile base stations are very effective where all kinds of communication channels were destroyed by earthquake. For example, on July 21, 2021, an extraordinarily heavy rainstorm hit Zhengzhou city, China destroying the electric communication equipment in many places resulting in the interruption of all cell phone and network signals for the affected people. The emergency rescuers could net get information from the affected area. Therefore, the Ministry of Emergency Management urgently dispatched a winged dragon drone to fly long distances across the region.
4.4. Satellite
The satellite has many advantages during the disastrous situation because it can provide a systematic and synergistic framework to facilitate scientific understanding of the Earth and thus disaster prediction and post-disaster support (Figure 5) [70]. The satellite data can help analyze the situation in the disaster area and provide rescuers with an important basis for decision making. It can further support earthquake rescue in the areas of detection, early warning, rescue navigation, communication, and prediction of secondary hazards. For example, the satellite imagery shared by the NASA earth observatory shows the damage of Turkish cities after the destructive earthquakes occurred on 2023 Feb 6th.
Navigation and monitoring satellites can perform detection and early warning functions before earthquakes. The recent advancement of real-time high-rate GPS can directly estimate the permanent displacement on the earth. This information can be combined with ground seismic sensors to make a more accurate early warning of earthquakes [71]. Infrared satellites can predict earthquakes by detecting anomalous ground warming prior to an earthquake [72]. The satellite information can be used by different agencies in different levels. For example, satellites enable governments and rescuers to know about earthquakes in advance, send rescue teams, and evacuate residents. For the public, satellites also allow people to know about earthquakes in anticipation so that they can take protective measures nearby.
The satellites provide historical and real-time images the disaster area before and after the earthquake. The satellite also provides a unique synergistic view of the spatial scale and variable time of the disaster area. The earth-orbiting satellite complement traditional in situ measurements and ground-based sensor networks such as those for seismology, volcanology, geomorphology, and hydrology [73]. The satellite communication has the advantages of a large communication range, good communication effect, and not influenced by terrestrial disasters, which plays an important role in earthquake rescue [73]. Moreover, the satellite can provide the spatio-temporal information of the disaster area to understand the possibility of subsequent disasters. This information can be sued to avoid casualties from subsequent disasters and economic losses [74].
5. Conclusions
With the continuous development of technology such as Internet of Things, AI, and the urgent need for disaster relief, seismic monitoring and rescue sensors have been widely developed and applied. The current development status of seismic monitoring and rescue sensors is mainly manifested in the following aspects.
- 1)
- Constant innovation in sensors technology: The emergence of new sensor technologies such as MEMS, DAS, UAV, satellite, and nanotechnology etc. can better detect and record seismic activity and building vibration information, improving the monitoring, early warning and rescue response capabilities for earthquake disasters.
- 2)
- Big data and AI application for sensor technology: with the development of the Internet, big data and artificial intelligence technologies, sensor data is widely collected and applied, achieving real-time data collection, processing and sharing at earthquake sites and to the public, which can improve rescue efficiency and response capabilities.
- 3)
- Development of sensor networks: Sensor networks technology is currently widely used in earthquake disaster monitoring and early warning and rescue response, where a stable communication network is established within the coverage area of the sensor network to achieve information transmission and real-time response, improving rescue efficiency.
- 4)
- Constant expansion of sensor application fields: sensors are not only limited to earthquake disasters, but are also widely used in fire rescue, mining rescue, flood rescue and other filed, which providing varies of environmental and safety monitoring and early warning methods. For example, sensors used to detect gas, flame, smoke, temperature, humidity, and other information to quickly detect dangerous situations such as fires and gas leaks inside buildings after earthquake can wildly use in fire and flood disasters.
In summary, the development of earthquake related sensors is an ongoing process of innovation and expansion, with continuous strengthening of scientific and technological progress, providing more efficient, intelligent and comprehensive protection for earthquake rescue and relief.
Author Contributions
Bingwei Tian, Tenglong Quan and Basanta Raj Adhikari designed the research; Bingwei Tian, Wenrui Liu, Haozhou Mo, Wang Li and YuTing Wang collected, collated and summarized the literature, and wrote the first draft of the article. Bingwei Tian, Wenrui Liu, Haozhou Mo, Wang Li, YuTing Wang Tenglong Quan and Basanta Raj Adhikari reviewed and proofread the first draft. Bingwei Tian provided the funding and managed and supervised the operation of the project. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by GIS-based education cooperation project for mountain disaster resilience improvement in the South Asian countries (No. DL2022164001L).
Data Availability Statement
All data generated or analyzed during this study are included in this published article and its supplementary information files.
Acknowledgments
We would like to thank Tenglong Quan for his valuable suggestions to improve
the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hain, A. Zaghi, J. Padgett, & Anibal Tafur. (2023). Case studies of multihazard damage: Investigation of the interaction of Hurricane Maria and the January 2020 earthquake sequence in Puerto Rico. Frontiers in Built Environment. [CrossRef]
- Agapiou, A., Amann, A., Mochalski, P., Statheropoulos, M., Thomas, C. L. P., & Thomas, C. L. P. (2015). Trace detection of endogenous human volatile organic compounds for search, rescue and emergency applications. Trends in Analytical Chemistry, 66, 158–175. [CrossRef]
- Allen, R. M., & Melgar, D. (2019). Earthquake Early Warning: Advances, Scientific Challenges, and Societal Needs. Annual Review of Earth and Planetary Sciences, 47(1), 361–388. [CrossRef]
- Al-Naji, A., Perera, A. G., Mohammed, S. L., & Chahl, J. (2019). Life Signs Detector Using a Drone in Disaster Zones. Remote Sensing, 11(20), 2441. [CrossRef]
- Barbosa, S., Donner, R. V., G. Steinitz, & Steinitz, G. (2015). Radon applications in geosciences—Progress & perspectives. European Physical Journal-Special Topics, 224(4), 597–603. [CrossRef]
- Bogue, R. (2016). Search and rescue and disaster relief robots: Has their time finally come? Industrial Robot-an International Journal, 43(2), 138–143. [CrossRef]
- Cooper, D. C. (2005). Fundamentals Of Search And Rescue.
- Cushman-Roisin, B. (1994). Introduction to Geophysical Fluid Dynamics.
- D’Alessandro, A., Scudero, S., Vitale, G., & Vitale, G. (2019). A Review of the Capacitive MEMS for Seismology. Sensors, 19(14), 3093. [CrossRef]
- DesRoches, R., Comerio, M. C., Eberhard, M. O., Mooney, W. D., Rix, G. J., & Rix, G. R. (2011). Overview of the 2010 Haiti Earthquake. Earthquake Spectra, 27, 1–21. [CrossRef]
- Di Zhang, Zhang, D., Sessa, S., Kasai, R., Cosentino, S., Giacomo, C., Mochida, Y., Yamada, H., Michele Guarnieri, Guarnieri, M., Guarnieri, M., & Takanishi, A. (2018). Evaluation of a Sensor System for Detecting Humans Trapped under Rubble: A Pilot Study. Sensors, 18(3), 852. [CrossRef]
- Fan, X., Juang, C. H., Wasowski, J., Runqiu Huang, Huang, R., Huang, R., Xu, Q., Scaringi, G., van Westen, C. J., van Westen, C. J., & Havenith, H.-B. (2018). What we have learned from the 2008 Wenchuan Earthquake and its aftermath: A decade of research and challenges. Engineering Geology, 241, 25–32. [CrossRef]
- Fan, Y. J., Wang, J., Deng, T., Chen, D., De Yong Chen, & He, W. (2013). The Characteristics of MEMS Based Seismic Sensors Using the Electrochemical Approach. Key Engineering Materials, 486–489. [CrossRef]
- Franklin Felber, & Felber, F. S. (2015). Demonstration of novel high power acoustic through the wall sensor. Proceedings of SPIE. [CrossRef]
- Fuhao Li, Shike Hou, Chunguang Bu, & Bo Qu. (2022). Rescue Robots for the Urban Earthquake Environment. Disaster Medicine and Public Health Preparedness, 1–5. [CrossRef]
- Garg, P., & Srivastava, S. Kr. (2016). Life Detection System during Natural Calamity. Conference Information and Communication Technology, 602–604. [CrossRef]
- Ge, L., Ng, A. H.-M., Li, X., Liu, Y., Du, Z., & Liu, Q. (2015). Near real-time satellite mapping of the 2015 Gorkha earthquake, Nepal. Annals of GIS, 21(3), 175–190. [CrossRef]
- Goda, K., Kiyota, T., Pokhrel, R. M., Chiaro, G., Katagiri, T., Sharma, K., & Wilkinson, S. (2015). The 2015 Gorkha Nepal Earthquake: Insights from Earthquake Damage Survey. Frontiers in Built Environment, 1(8), 1–15. [CrossRef]
- Goldberg, B. S., Hall, J. E., Jeanine E. Hall, Pham, P. K., Pham, P. K., Christine S. Cho, Cho, C. S., & Christine S. Cho. (2021). Text messages by wireless mesh network vs voice by two-way radio in disaster simulations: A crossover randomized-controlled trial. American Journal of Emergency Medicine, 48, 148–155. [CrossRef]
- Goodstein, J. R. (1984). Waves in the Earth: Seismology Comes to Southern California. Hist Stud Phys Sci, 14(2), 201–230. [CrossRef]
- Hagiwara, H., Suzuki, K., & Yamazaki, Y. (2019). Autonomous rescue robots using pyroelectric infrared sensors. IEEE/SICE International Symposium on System Integration, 283–288. [CrossRef]
- Hao Chen, Chen, H., Xie, Q., Lan, R., Li, Z., Li, Z., Xu, C., & Yu, S. (2017). Seismic damage to schools subjected to Nepal earthquakes, 2015. Natural Hazards, 88(1), 247–284. [CrossRef]
- Heavlin, W. D., Kappler, K. N., Yang, L., Minjie Fan, Jason Hickey, Lemon, J., Laura MacLean, Thomas Bleier, Riley, P., & Daniel Schneider. (2022). Case-control study on a decade of ground-based magnetometers in California reveals modest signal 24-72h prior to earthquakes. Journal Of Geophysical Research: Solid Earth. [CrossRef]
- Heavlin, W. D., Kappler, K., Yang, L., Fan, M., Hickey, J., Lemon, J., MacLean, L., Bleier, T., Riley, P., & Schneider, D. (2022). Case-Control Study on a Decade of Ground-Based Magnetometers in California Reveals Modest Signal 24–72 hr Prior to Earthquakes. Journal of Geophysical Research: Solid Earth, 127(10), e2022JB024109. [CrossRef]
- Huafeng Liu, Zhi-Cai Luo, Zhong-Kun Hu, Shan-Qing Yang, Liang-Cheng Tu, Zebing Zhou, & Kraft, M. (2022). A review of high-performance MEMS sensors for resource exploration and geophysical applications. Petroleum Science. [CrossRef]
- Huanhuan Yin, Zhihua Shao, Chen, F., Quiao, X., & Qiao, X. (2022). Highly Sensitive Ultrasonic Sensor Based on Polymer Bragg Grating and its Application for 3D Imaging of Seismic Physical Model. Journal of Lightwave Technology, 40(15), 5294–5299. [CrossRef]
- Lior, A. Sladen, D. Rivet, J. Ampuero, Y. Hello, Carlos Becerril, H. Martins, P. Lamare, C. Jestin, S. Tsagkli, & C. Markou. (2021). On the Detection Capabilities of Underwater Distributed Acoustic Sensing. Journal of Geophysical Research: Solid Earth. [CrossRef]
- Jia, M., Gu, X., Guo, Q., Xiang, W., & Zhang, N. (2016). Broadband Hybrid Satellite-Terrestrial Communication Systems Based on Cognitive Radio toward 5G. IEEE Wireless Communications, 23(6), 96–106. [CrossRef]
- Jorge, V. A. M., Granada, R., Maidana, R. G., Jurak, D. A., Heck, G., Negreiros, A., Santos, D. H. dos, Gonçalves, L. M. G., & Amory, A. M. (2019). A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions. Sensors, 19(3), 702. [CrossRef]
- K. Sager, V. Tsai, Y. Sheng, F. Brenguier, P. Boué, A. Mordret, & H. Igel. (2021). Modelling P waves in seismic noise correlations: Advancing fault monitoring using train traffic sources.
- Kargel, J. S., Gregory J. Leonard, Leonard, G. J., Shugar, D. H., Haritashya, U. K., Bevington, A. R., Fielding, E. J., Fujita, K., Geertsema, M., Miles, E. S., Steiner, J. F., Anderson, E., Bajracharya, S. R., Bawden, G. W., Breashears, D. F., Byers, A. L., Collins, B. D., M. R. Dhital, M. R. Dhital, … Young, N. (2015). Supplementary Material for Geomorphic and geologic controls of geohazards induced by Nepal’s 2015 Gorkha earthquake. Science. [CrossRef]
- Ke-ch, Y. (2015). Recent development and its prospect of satellite communications. Journal of Communications. [CrossRef]
- Li, X., Zhang, X., & Guo, B. (2013). Application of Collocated GPS and Seismic Sensors to Earthquake Monitoring and Early Warning. Sensors, 13(11), 14261–14276. [CrossRef]
- Li, Z. (2021). Recent advances in earthquake monitoring I: Ongoing revolution of seismic instrumentation. Earthquake Science, 34(2), 177–188. [CrossRef]
- M S Sruthi, Manal Jaleel Poovathingal, V N Nandana, S Lakshmi, Mohamed Samshad, & V S Sudeesh. (2021). YOLOv5 based Open-Source UAV for Human Detection during Search And Rescue (SAR). 2021 International Conference on Advances in Computing and Communications (ICACC). [CrossRef]
- Mao, Z. (2021). Basic Principles of Microwave Communication. 1885(2), 022062. [CrossRef]
- Marra, G., Clivati, C., Luckett, R., Tampellini, A., Jochen Kronjager, Kronjäger, J., Wright, L., Mura, A., Levi, F., Robinson, S. P., Xuereb, A., Baptie, B., & Calonico, D. (2018). Ultrastable laser interferometry for earthquake detection with terrestrial and submarine cables. Science, 361(6401), 486–490. [CrossRef]
- Meier, M.-A., Ross, Z. E., Ramachandran, A., Balakrishna, A., Nair, S., Kundzicz, P., Li, Z., Andrews, J. E., Andrews, J., Hauksson, E., & Yue, Y. (2019). Reliable Real-Time Seismic Signal/Noise Discrimination With Machine Learning. Journal of Geophysical Research, 124(1), 788–800. [CrossRef]
- Miryam Naddaf. (2023). Turkey–Syria earthquake: What scientists know. Nature. [CrossRef]
- Mochalski, P., Ruzsanyi, V., Wiesenhofer, H., & Mayhew, C. A. (2018). Instrumental sensing of trace volatiles-a new promising tool for detecting the presence of entrapped or hidden people. Journal of Breath Research, 12(2), 027107–027107. [CrossRef]
- Mochalski, P., Unterkofler, K., Teschl, G., & Amann, A. (2015). Potential of volatile organic compounds as markers of entrapped humans for use in urban search-and-rescue operations. Trends in Analytical Chemistry, 68, 88–106. [CrossRef]
- Morales-Simfors, N., Wyss, R., & Bundschuh, J. (2020). Recent progress in radon-based monitoring as seismic and volcanic precursor: A critical review. Critical Reviews in Environmental Science and Technology, 50(10), 979–1012. [CrossRef]
- Moura, P. C., & Vassilenko, V. (2023). Contemporary ion mobility spectrometry applications and future trends towards environmental, health and food research: A review. International Journal of Mass Spectrometry, 486, 117012. [CrossRef]
- Moura, P. C., Vassilenko, V., & Ribeiro, P. A. (2023). Ion Mobility Spectrometry Towards Environmental Volatile Organic Compounds Identification and Quantification: A Comparative Overview over Infrared Spectroscopy. Emission Control Science and Technology, 9(1), 25–46. [CrossRef]
- Mukundan, A. (2012). Novel nanotesla magnetic field sensors for an early warning system for earthquakes. Geophysics, 31(10), 1224–1227. [CrossRef]
- Nakamura, H., Shigeki Horiuchi, Horiuchi, S., Wu, C., Yamamoto, S., & Rydelek, P. A. (2009). Evaluation of the real-time earthquake information system in Japan. Geophysical Research Letters, 36(5). [CrossRef]
- Priyankar Choudhary, Neeraj Goel, & Mukesh Saini. (2022). A Fingerprinting based Audio-Seismic Systems for Human Target Localization in an Outdoor Environment using Regression. IEEE Sensors Journal, 1–1. [CrossRef]
- Recchiuto, C. T., & Sgorbissa, A. (2018). Post-disaster assessment with unmanned aerial vehicles: A survey on practical implementations and research approaches. Journal of Field Robotics, 35(4), 459–490. [CrossRef]
- Saunders, J. K., Minson, S. E., & Baltay, A. S. (2022). How low should we alert? Quantifying intensity threshold alerting strategies for earthquake early warning in the United States. Earth’s Future. [CrossRef]
- Seetohul, J., & Shafiee, M. (2022). Snake Robots for Surgical Applications: A Review. Robotics, 11(3), Article 3. [CrossRef]
- Sharma, K., Rajesh Doriya, Pandey, S. K., Kumar, A., G. R. Sinha, & Dadheech, P. (2022). Real-Time Survivor Detection System in SaR Missions Using Robots. Drones, 6(8), 219–219. [CrossRef]
- Shen, G., Zhang, J., Alan Marshall, Alan Marshall, Marshall, A. G., Peng, L., Wang, X., & Xianbin Wang. (2021). Radio Frequency Fingerprint Identification for LoRa Using Deep Learning. IEEE Journal on Selected Areas in Communications, 39(8), 2604–2616. [CrossRef]
- Sheng, Y., Qingkai Kong, Kong, Q., Qingkai Kong, & Beroza, G. C. (2021). Network analysis of earthquake ground motion spatial correlation: A case study with the San Jacinto seismic nodal array. Geophysical Journal International, 225(3), 1704–1713. [CrossRef]
- Suárez, G., Espinosa-Aranda, J. M., Cuéllar, A., Ibarrola, G., García, A., Zavala, M., Maldonado, S., & Islas, R. (2018). A Dedicated Seismic Early Warning Network: The Mexican Seismic Alert System (SASMEX). Seismological Research Letters, 89, 382–391. [CrossRef]
- Tanaka, Y., & Heki, K. (2014). Long- and short-term postseismic gravity changes of megathrust earthquakes from satellite gravimetry. Geophysical Research Letters, 41(15), 5451–5456. [CrossRef]
- Thapa, M., Alsadoon, A., Prasad, P. W. C., Pham, L., & Elchouemi, A. (2016). Impact of using mobile devices in earthquake. International Joint Conference on Computer Science and Software Engineering, 1–6. [CrossRef]
- Tralli, D. M., Blom, R. G., Zlotnicki, V., Donnellan, A., & Evans, D. L. (2005). Satellite remote sensing of earthquake, volcano, flood, landslide and coastal inundation hazards. Isprs Journal of Photogrammetry and Remote Sensing, 59(4), 185–198. [CrossRef]
- Tronin, A. A., Hayakawa, M., Molchanov, O. A., & Oleg A. Molchanov. (2002). Thermal IR satellite data application for earthquake research in Japan and China. Journal of Geodynamics, 33(4), 519–534. [CrossRef]
- Vautz, W., Slodzynski, R., Hariharan, C., Seifert, L., Nolte, J., Fobbe, R., Sielemann, S., Lao, B. C., Huo, R., Thomas, C. L. P., & Hildebrand, L. (2013). Detection of metabolites of trapped humans using ion mobility spectrometry coupled with gas chromatography. Analytical Chemistry, 85(4), 2135–2142. [CrossRef]
- Wang, B., Xie, R., Wang, A., Xu, H., Zhang, J., Han, H., Zhang, Z., Liu, L., & Li, J. (2020). Target Localization and Tracking Using an Ultra-Wideband Chaotic Radar With Wireless Synchronization Command. IEEE Access, 9, 2890–2899. [CrossRef]
- Wilson, A. D., & Baietto, M. (2011). Advances in Electronic-Nose Technologies Developed for Biomedical Applications. Sensors, 11(1), 1105–1176. [CrossRef]
- Wu, C., Hao Zhang, Hao, Z., Lv, C., Song, J., & Yin, Y. (2018). Research on Key Technology of Emergency Communication System in Post-Earthquake Disaster Relief. 2018 IEEE International Conference of Safety Produce Informatization (IICSPI). [CrossRef]
- Wu, Y.-M., Mittal, H., & Himanshu Mittal. (2021). A Review on the Development of Earthquake Warning System Using Low-Cost Sensors in Taiwan. Sensors, 21(22), 7649. [CrossRef]
- Xiangxian Zhu. (2021). Short Wave Communication Transmission Signal Monitoring Method based on Genetic Algorithm. International Conference Electronic Systems, Signal Processing and Computing Technologies [ICESC-]. [CrossRef]
- Xing Liu. (2018). Application of Shortwave Communication Technology in Power Emergency Communication System. [CrossRef]
- Xiu, Z., & Jian, L. (2009). Technical system construction of Data Backup Centre for China Seismograph Network and the data support to researches on the Wenchuan earthquake. Chinese Journal of Geophysics. [CrossRef]
- Xu, H., Xu, H., Li, Y., Li, Y., Li, L., Li, L., Jianguo Zhang, Zhang, J., Zhang, J., Han, H., Han, H., Liu, L., Liu, L., Wang, B., & Wang, B. (2019). Life-detection radar based on wideband chaotic signal. The Journal of Engineering, 2019(19), 6322–6326. [CrossRef]
- Xu, Y., Jie Chen, Chen, J., Chen, J., Jie Chen, Dai, S., Shun Dai, & Fang, G. (2011). Experimental Study of UWB Pulse Radar for Life Detection. 2011 First International Conference on Instrumentation, Measurement, Computer, Communication and Control, 729–732. [CrossRef]
- Yamauchi, Y., Yuichi Ambe, Hikaru Nagano, Masashi Konyo, Yoshiaki Bando, Eisuke Ito, Solvi Arnold, Kimitoshi Yamazaki, Katsutoshi Itoyama, Takayuki Okatani, Hiroshi G. Okuno, & Satoshi Tadokoro. (2022). Development of a continuum robot enhanced with distributed sensors for search and rescue. ROBOMECH Journal, 9(1). [CrossRef]
- Ye, H., & Ye, H. (2012). Life Detection Technique in Earthquake Search and Rescue. 2012 Second International Conference on Instrumentation, Measurement, Computer, Communication and Control, 664–666. [CrossRef]
- Yutaka Nakamura. (2008). ON-SITE ALARM – THE EFFECTIVE EARTHQUAKE EARLY WARNING.
- Zahraa Tarik AlAli, & Alabady, S. A. (2022). A survey of disaster management and SAR operations using sensors and supporting techniques. International Journal of Disaster Risk Reduction, 103295–103295. [CrossRef]
- Zheng, Y.-J., Ling, H.-F., Chen, S., Shengyong Chen, Xue, J., & Xue, J. (2015). A Hybrid Neuro-Fuzzy Network Based on Differential Biogeography-Based Optimization for Online Population Classification in Earthquakes. IEEE Transactions on Fuzzy Systems, 23(4), 1070–1083. [CrossRef]
- Zhu, Y., Liu, F., Zhang, G., & Xu, Y. (2019). Development and prospect of mobile gravity monitoring and earthquake forecasting in recent ten years in China. Geodesy and Geodynamics, 10(6), 485–491. [CrossRef]
Figure 1.
The operating wavelength profile of the different sensors.
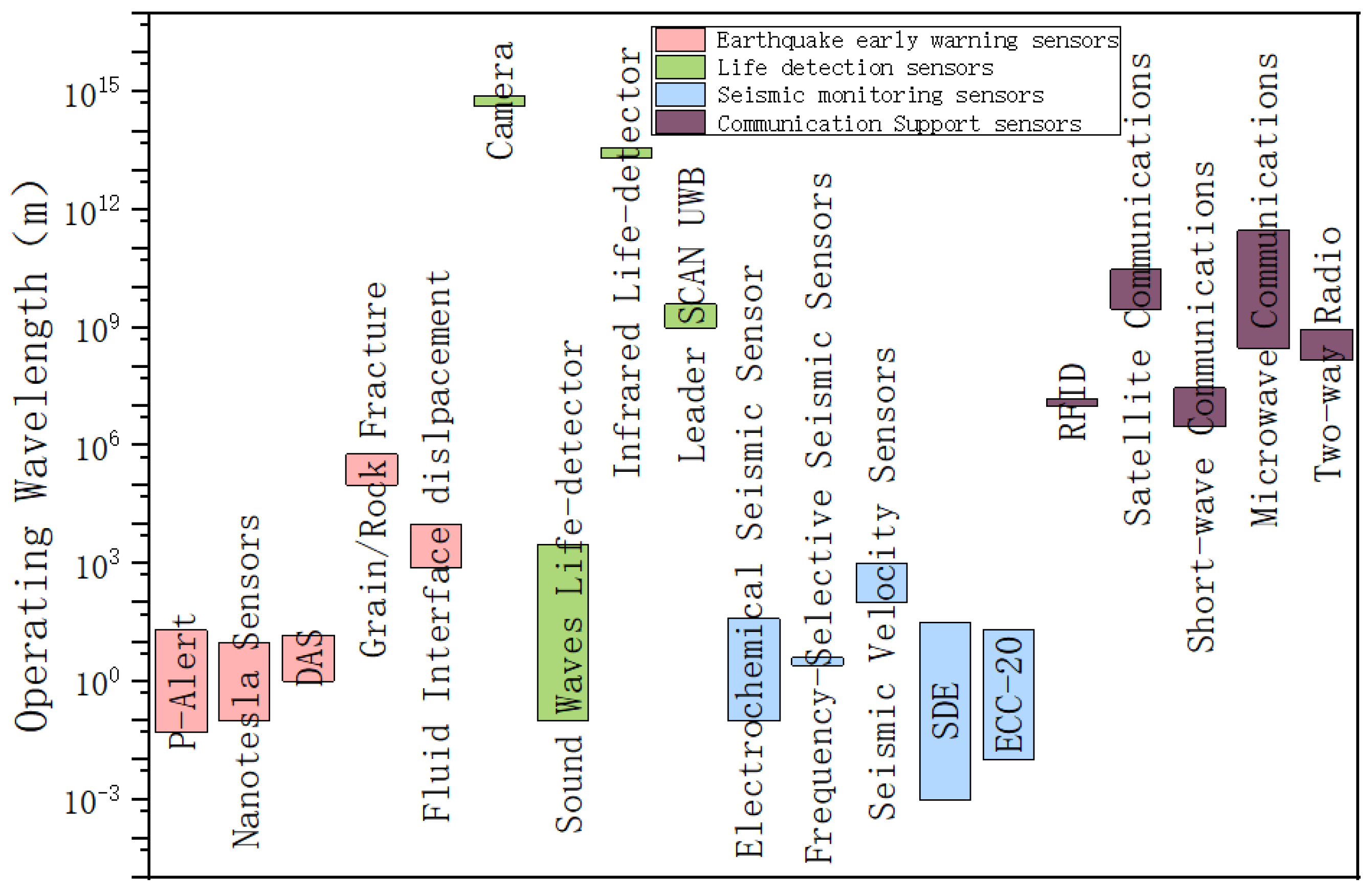
Figure 2.
The operating wavelength profile of the different sensors.
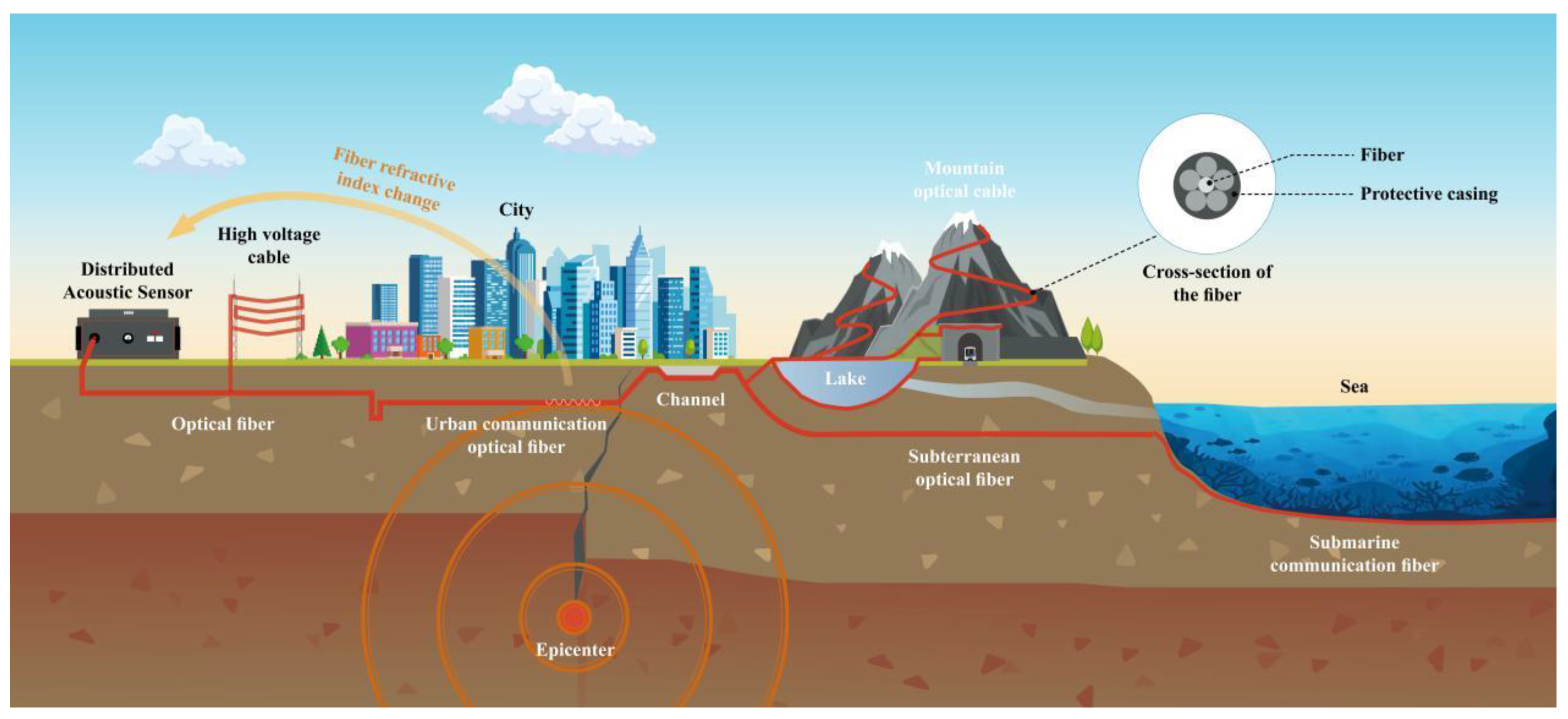
Figure 3.
Principle of earthquake early warning.
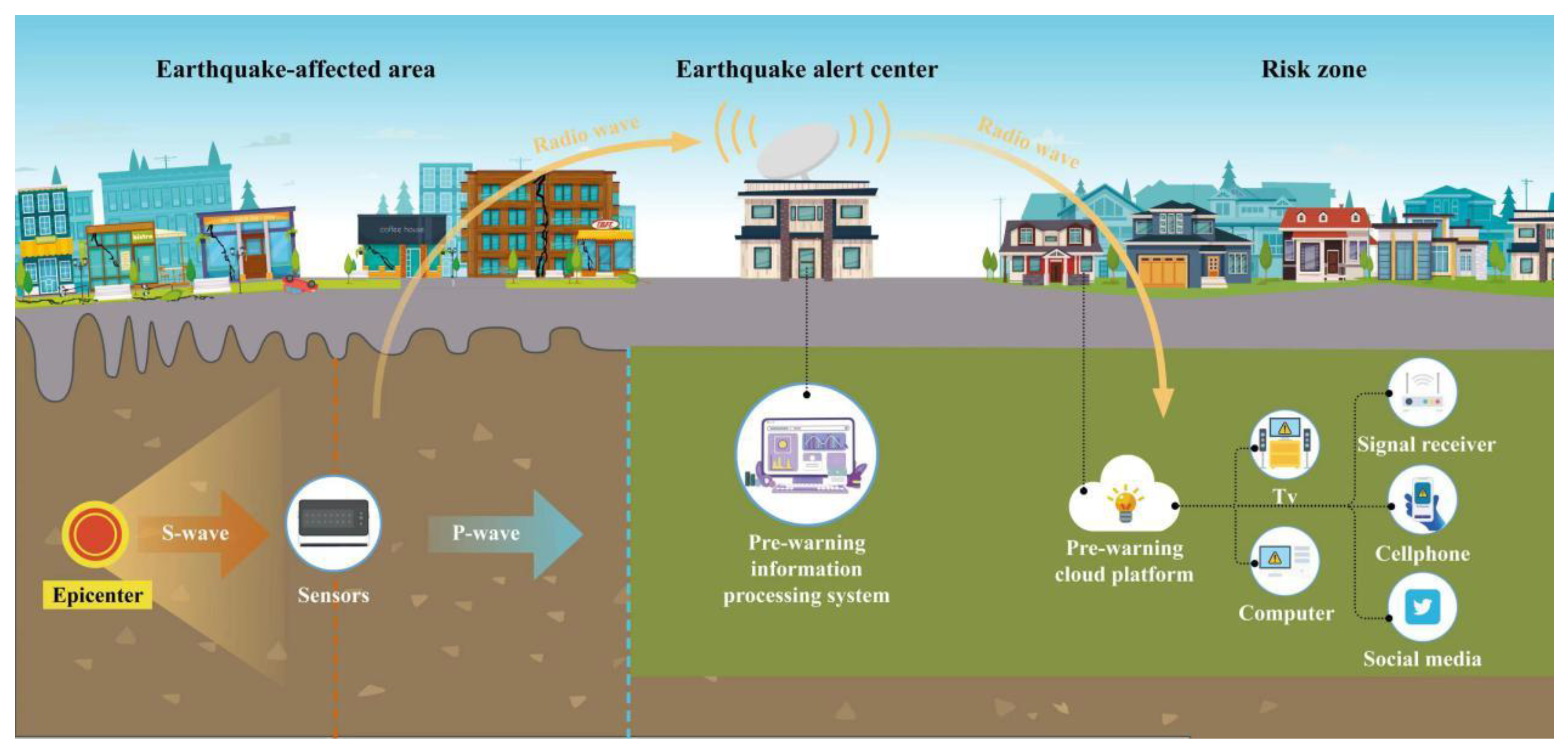
Figure 4.
Three types of earthquake emergency vehicles.
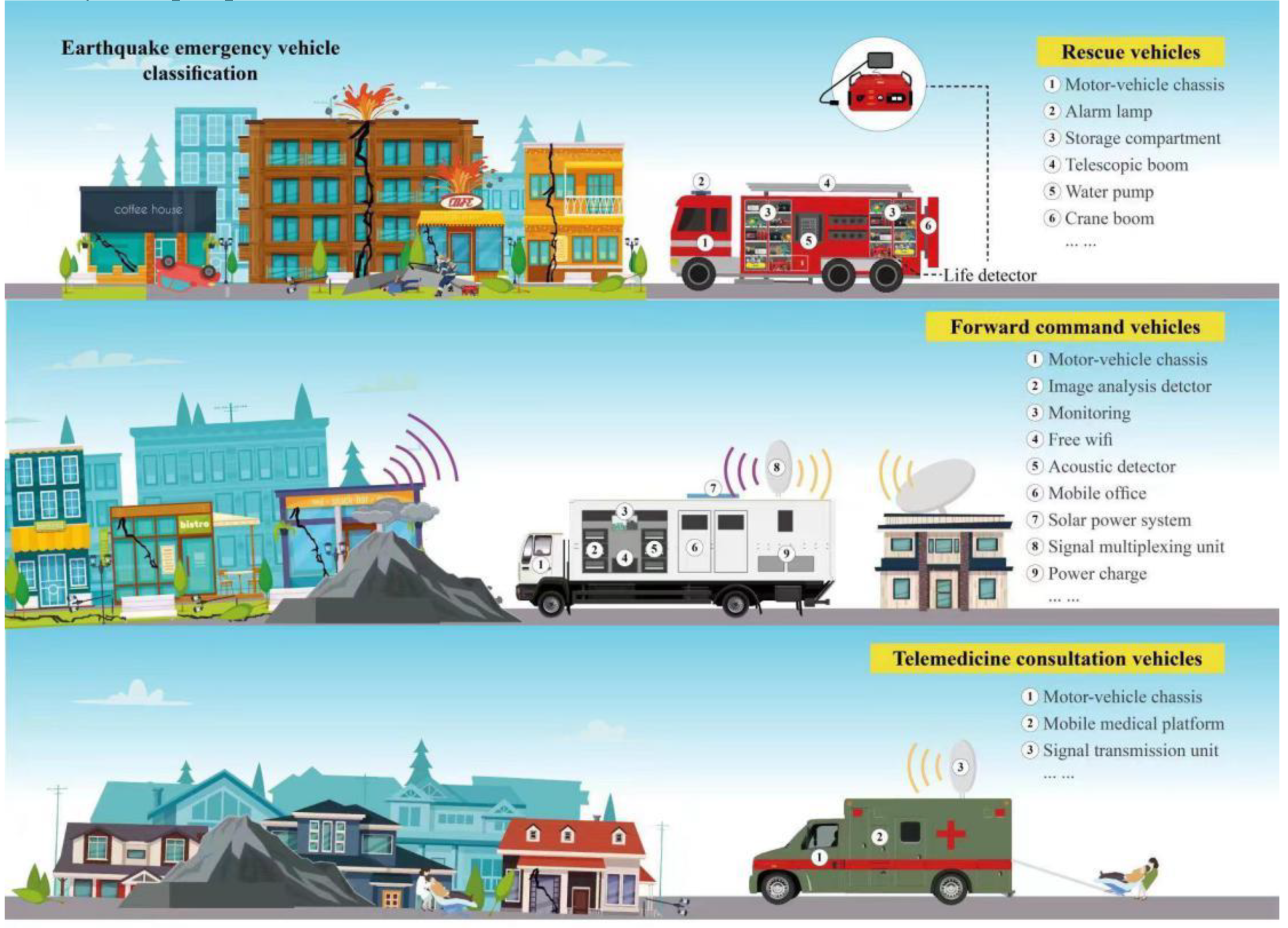
Figure 5.
The mechanism of the earthquake and different kinds of sensors.
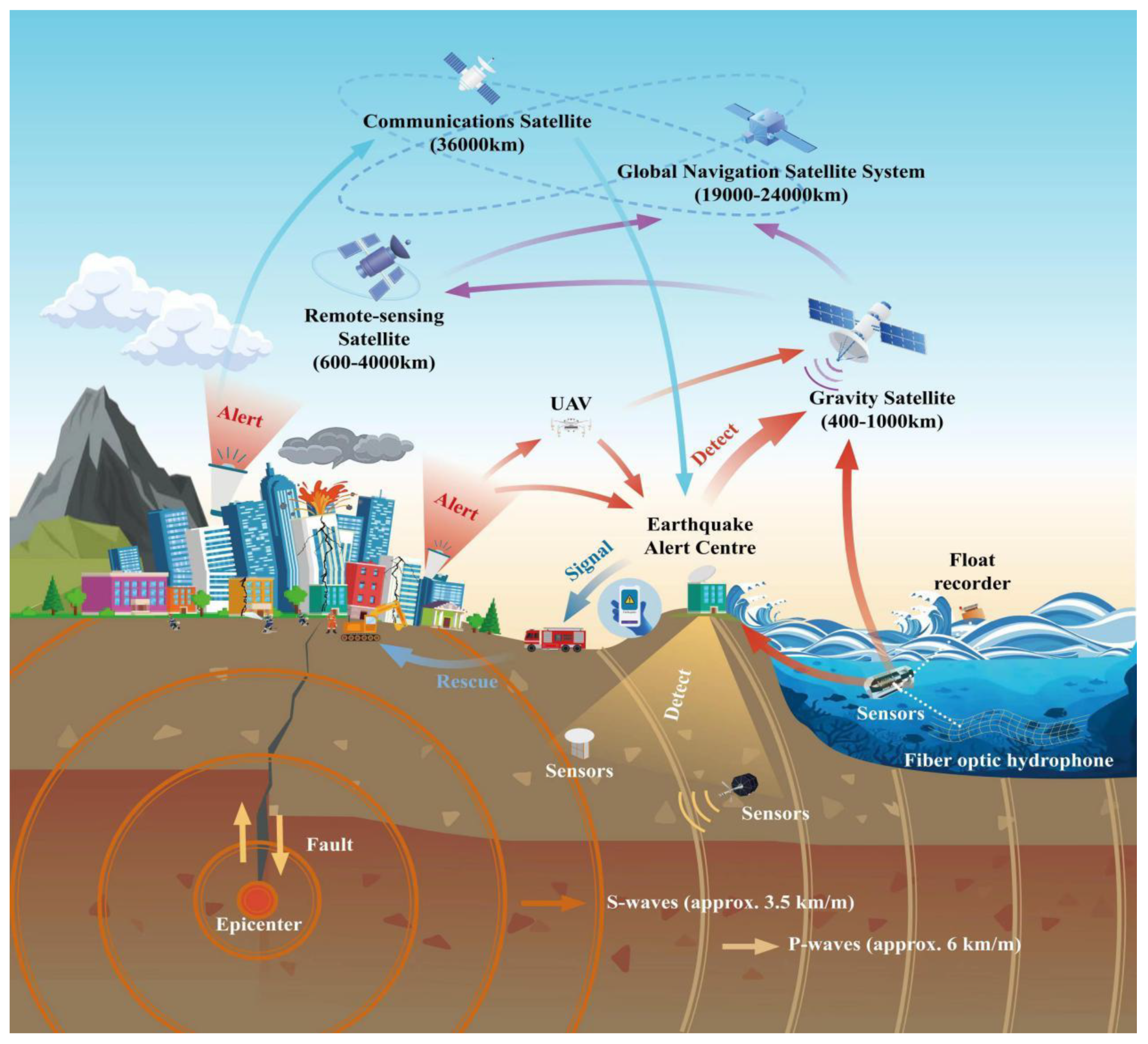

Table 1.
Modern sensors for earthquake monitoring, early warning, search and rescue.
| Name | Type | Apply time | Theory | Height of application |
|---|---|---|---|---|
| Snake Eye Life detector | Life detector | 0-72hr | Intercom probe, video probe, infrared thermal imaging probe | ground |
| LEADER Hasty | Life detector | 0-72hr | It incorporates vibration signal listening, video search and calls to trapped people | ground |
| Airborne radar-photoelectric composite life detection system | Life detector | 0-72hr | Two-dimensional radar and visible/infrared cameras | low altitude |
| Native safety radar vibration compound life detector YSF40 | Life detector | 0-72hr | Intrinsically safe two-dimensional radar is combined with intrinsically safe wireless micro vibration sensor | ground |
| Prototype of portable locator employing chemical analysis | Life detector | 0-72hr | infrared (IR) camera and different gas sensors |
ground |
| DZQ 12-3A cascade engineering seismograph | Seismic prospecting | Long period | Using hammer strike, electric spark or explosion as the source, excite by observing and recording the travel time of seismic wave, detect the buried depth, shape and distribution law of different elastic stratum interface, so as to solve the problem of engineering and resource geophysical exploration, and explore the depth from several meters to hundreds of meters | Underground several meters to several kilometer |
| P-alert | Earthquake early warning | Long period | Earthquake P wave sensor, in addition to the traditional S wave detection function, but also embedded in the earthquake rapid report technology, can detect P wave and determine whether a catastrophic earthquake within 3 seconds. | Underground |
| Alpha GUARD | Earthquake early warning | Long period |
Seismic precursor analysis using atmospheric radon anomaly. |
ground |
| CG-5 Gravimeter | Seismic prospecting | Long period | Study the physical phenomena of gravity changes on the Earth’s surface and in the space around it. | ground |
| Distributed acoustic sensing, DAS | Earthquake early warning | Long period | The acoustic sensor detects the external signal in the optical fiber. By extracting and demodulation the interference signal of sound vibration at different time, the quantitative measurement of external physical quantity can be realized. | Underground |
| Radio-Frequency Identification (RFID) | Communication support | 0-72h for Life saving and after 72 h for other usage | RFID is a generic term for technologies that use radio waves to automatically identify people or objects | Ground |
| two-way radio system | Communication support | Provide the possibility of communication after the earthquake. |
A two-way radio is a radio that can both transmit and receive radio waves (a transceiver), unlike a broadcast receiver which only receives content. It is an audio (sound) transceiver, a transmitter and receiver in one unit, used for bidirectional person-to-person voice communication with other users with similar radios. | Above/below ground |
| Communications Satellite | Communication support | Long Period | Satellite communication is the communication between radio communication stations on Earth (including the ground and the lower atmosphere) using satellites as a medium. | upper air |
| UAV | Communication support | Provide communication after an earthquake | It is equipped with photoelectric detection pod, synthetic aperture radar, aerial CCD camera, emergency communication support pod, emergency delivery pod and other equipment to provide communication support and obtain front-line information | Up to 9000m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



