Submitted:
04 May 2023
Posted:
05 May 2023
You are already at the latest version
Abstract
Convolutional neural networks (CNN) have attracted much attention as a commonly used method for hyperspectral image (HSI) classification in recent years, however, CNNs can only be applied to Euclidean data and have limitations in dealing with relationships due to the limitations of local feature extraction. However, each pixel of a hyperspectral image contains a set of spectral bands that are correlated and interact with each other, and the methods used to process Euclidean data cannot effectively obtain these correlations. In contrast, the graph convolutional network (GCN) can be used in non-Euclidean data, but usually leads to oversmoothing and ignoring local detail features due to the need for superpixel segmentation processing to reduce computational effort. To overcome the above problems, we constructed a network a fusion network based on GCN and CNN, which contains two branches: a graph convolutional network based on superpixel segmentation and a convolutional network with added attention mechanism. The graph convolu-tional branch can extract the structural features and capture the relationships between the nodes, and the convolutional branch can extract the detailed features in the local fine region. Owing to the fact that the features extracted from the two branches are different, the classification performance can be improved by fusing the complementary features extracted from the two branches. To vali-date the proposed algorithm, experiments were conducted on three widely used datasets, namely Indian Pines, Pavia University, and Salinas, and the overall accuracy of 98.78% was obtained in the Indian Pines dataset, and the overall accuracy of 98.99% and 98.69% was obtained in the other two datasets. The results showed that the proposed fusion network can obtain richer features and achieve high classification accuracy.
Keywords:
hyperspectral images
; convolutional neural networks
; graph convolutional networks
; feature fusion
1. Introduction
With the advancement of hyperspectral imaging technology, hyperspectral imaging systems can simultaneously acquire abundant spectral information and two-dimensional spatial information of a feature and then form a hyperspectral image(HSI)[1,2,3]. HSI provides tens to hundreds of continuous spectral bands[4]. The abundance of spectral information greatly enhances the ability to distinguish objects. Therefore, HSI has been commonly used in disaster monitoring, vegetation classification, fine agriculture and medical diagnosis due to its extremely high spectral resolution[1,2,5].
HSI classification task as the focus of the field of hyperspectral image analysis has always received much attention from scholars. Hyperspectral image classification aims to classify each pixel point in the image [6]. In the early days, most HSI classification methods mainly relied on some traditional machine learning algorithms[7], which were mainly divided into two processes: traditional manual feature engineering and classifier classification[8]. Feature engineering is aimed at processing data based on knowledge so that the processed features can be better used in subsequent classification algorithms, commonly used feature engineering methods include principal component analysis (PCA), independent component analysis and other dimensionality reduction methods.
Typical classification algorithms such as support vector machine (SVM)[9], random forest (RF)[10]and k-nearest neighbor (KNN)[11], etc. The above machine learning approaches only focus on the spectral information of HSI, and it is inaccurate to use the spectral information only for the classification task, thus limiting the improvement of classification accuracy and gradually being eliminated.
As a result of the triumph of deep learning in areas such as computer vision, many approaches based on deep learning have also been adopted for hyperspectral image classification [12]. Among the deep learning methods, convolutional neural networks(CNN) [13] have become a popular method for hyperspectral image classification due to their excellent performance. Deep learning-based methods represented by CNN have replaced traditional machine learning-based HSI classification methods and have become a research spot[14].
Deep learning methods of 1D-CNN [15] and 2D-CNN were first applied to hyperspectral image classification, and the performance surpassed machine learning methods, but the above methods suffer from underutilization of spatial and spectral information. Therefore, the 3D-CNN model [16] was proposed, which can extract spatial-spectral features simultaneously and therefore obtain better classification results, but the model has a large computational burden. To extract richer features, some scholars proposed a hybrid spectral CNN (HybridSN) [16], which combines 3D-CNN and 2D-CNN to exploit the spatial-spectral features of HSI with less computational burden than 3D-CNN.
With the purpose of finding correlations between data, highlight important features and ignore irrelevant noise information, attention mechanism has been proposed. Li et al. proposed a two-branch double attention network (DBDA)[17], which contains two branches to extract spatial and spectral features, and added attention mechanism to obtain better classification results. In order to capture richer features, deeper network layers are needed, but the deeper network layers will lead to computational complexity and make the model training difficult. Zhong et al. introduced a residual structure based on the 3D-CNN model[18], constructed a spectral residual module and a spatial residual module, achieved more satisfactory classification results.
Although the classification results achieved by CNN-based classification methods have been good, there are still some limitations. First, CNN is designed for Euclidean data, and the traditional CNN model can only convolve regular rectangular regions, so it is difficult to obtain complex topological information; Second, CNN cannot capture and utilize the relationship between different pixels or regions in hyperspectral images, it can only extract detailed features in the local fine region, but the structure features and dependency relationship between the nodes may provide useful information for the classification process[19,20].
In order to obtain the relationship between objects, graph convolutional networks(GCN) have been developed rapidly in recent years. GCN is designed to process graph structured data,CNN is used for processing Euclidean data such as images, which are regular matrix, so no matter where the convolution kernel of a CNN is located in the image, the consistency of the result of the operation is guaranteed, and we call it translational invariance. However, the graph structured data is non-Euclidean data, and the graph structure is irregular so it is impossible to apply CNN on graph data. The graph convolution is designed to resolve this situation. The most important innovation of GCN is to overcome the inapplicability of translation invariance on non-Euclidean data, so it can be applied to extract the features of the graph structure.
Kipf et al. proposed the GCN model [21], which is able to operate on non-Euclidean data and extract the structural relationship between different nodes. [19]. Some scholars have tried to apply GCN to hyperspectral classification tasks[22], and studies have shown that the classification results are not only affected by spectral information, but also related to spatial structure information of the pixels[20,23]. By treating each pixel or superpixel in the HSI as a graph node, the hyperspectral image can be converted into graph structured data, and then the GCN can be used to obtain the spatial structure information in the image and provide more effective information for classification. Hong et al [20]proposed the miniGCN method and constructed an end-to-end fusion network which was able to sample images in small batches, classify images as subgraphs and achieved good classification results. Wan et al proposed MDGCN [24], which is different from the commonly used GCN working on a fixed graph model, MDGCN is able to make the graph structure update dynamically, so that the two steps benefit each other. In addition, we cannot consider each pixel of a HSI as a graph node due to the limitation of computational complexity, so hyperspectral images are usually preprocessed as superpixels. Superpixel segmentation technique is applied to the construction of graph structure, which reduces the complexity of model training significantly. But the superpixel segmentation technique leads to another problem, superpixel segmentation often leads to smooth edges of the classification map and lack of local detail information of the features. This problem has restricted the improvement of the classification performance and has an impact on the analysis of the results.
To obtain the relational features of HSI and to solve the problem of missing details due to superpixel segmentation, inspired by [25], we designed a feature fusion of CNN and GCN networks (FCGN), the algorithm consisted of two branches, GCN branch and CNN branch. We apply the superpixel segmentation technique in the GCN branch. Superpixel segmentation technique can aggregate similar pixels into a superpixel, and then we treat these superpixels as graph nodes. Graph convolution processes the data by aggregating the features of each node as well as its neighboring nodes. This approach can capture the structure features and dependency relationship between the nodes and thus better represent the features of the nodes. Compared with CNN branch, GCN branch based on superpixel segmentation can acquire structure information of longer distance, while the CNN branch can obtain the pixel-level features of the HSI and perform fine classification of local regions. Finally, the different features acquired by the two branches are fused to obtain richer image features by complementing their strengths. In addition, the attention mechanism and depthwise separable convolution algorithm[26] are applied to further optimize the classification results and network parameters.
2. Methodology
This section presents the proposed FCGN for HSI classification which includes the overall structure of FCGN and the function of each module in the network.
2.1. General Framework
To solve the problem of missing local details in classification maps due to superpixel segmentation, we proposed a feature fusion of CNN and GCN network, as shown in Figure 1, the proposed network framework contains a spectral dimension reduction module (see Section 2.2 for details), a graph convolutional branch(see Section 2.3 for details), a convolutional branch(see Section 2.4 for details), a feature fusion module and a softmax classifier. It should be noted that the features extracted from convolutional neural networks are different from those of graph convolutional networks. Feature fusion methods can utilize different features of an image to complement each other's strengths, thus obtaining more robust and accurate results. Because of that, it is the reason why it is possible to obtain better classification results than a single branch by fusing features from two branches.
The original HSI is handled by the spectral dimensionality reduction module first, which is used for spectral information transformation and feature dimensionality reduction. Then, we use convolutional neural networks to extract the detailed features in a local fine region, considering the problem that CNN-based method may overfitting with too many parameters and insufficient number of training samples, we use a depth separable convolution to reduce the parameters and enhance the robustness. To further improve the model, we add attention modules to the convolution branch. We use the SE attention module to optimize the proposed network[27]. SE module can obtain the weight matrix of different channels. Then, the weight values of each channel calculated by the SE module are multiplied with the two-dimensional matrix of the corresponding channel of the original feature map. We use graph convolutional networks to extract the superpixel-level contextual features, in this branch, we apply a graph encoder and a graph decoder to implement the transformation of pixel features and superpixel-level features(see Section 2.5 for details). Next, the different features acquired by the two branches are fused to obtain richer image features by complementing their strengths. Finally, after the processing of the softmax classifier, we can get the label of each pixel.
2.2. Spectral dimension reduction module
There is a lot of redundant information in the original hyperspectral image, by using dimension reduction modules, it is possible to significantly reduce the computational cost without significant performance loss. 1×1 convolutional layer has the ability to remove useless spectral information and increase nonlinear characteristics. Moreover, it is usually used as dimension reduction module to remove computational cost. As shown in Figure 2. In the FCGN network, hyperspectral images are first processed by two 1×1 convolutional blocks. Specifically, each of 1×1 convolutional block contains a BN layer, a 1×1 convolution layer, and an activation function layer. The role of the BN layer is to speed up the convergence of the network, and the activation function layer can significantly increase the network nonlinearity to achieve better expressiveness. The activation function in this module adopts Leaky ReLU.
We have
where denotes input feature map, denotes the batch-normalized input feature map, denotes output feature map, denotes the convolution kernel of the input feature map in row x, column y, denotes bias and n is the number of convolution kernels. represents the Leaky ReLU activation function.
2.3. Graph Convolution Branch
Numerous studies have shown that the classification accuracy can be effectively improved by combining the different features of images. Traditional CNN models can only convolve images in regular image regions using convolution kernels of fixed size and weight, resulting in the inability to obtain global features and structural features of images, so it is often need to deepen the network layer to alleviate this problem. However, as the number of network layers deepens, the chance of overfitting increases subsequently, especially when processing data with a small amount of training samples like HSI, such a result is unacceptable to us.
Therefore, a GCN branch based on superpixel segmentation is constructed to obtain the structural features. Different from CNN, GCN is a method used for graph structure. GCN branch can extract the structure features and dependency relationship between the nodes from images. These features are different from the neighborhood spatial features in a local fine region region extracted by the CNN branch.Finally, the property of the network can be enhanced by fusing the different features extracted from the two branches. The graph structure is a non-Euclidean structure that can be defined as , whereis the set of nodes andis the set of edges,andare usually encoded into a degree matrix D and node matrix A , where D records the relationship between each pixel of the hyperspectral image, and A denotes the number of edges associated with each node.
Because the degree of each graph node in the graph structure is not the same, GCN cannot directly use the same size local graph convolution kernel for all nodes like CNN. Considering that the convolution in the spatial domain is equivalent to the product in the frequency domain, researchers hope to implement the convolution operation on topological graphs with the help of the theory of graph spectra, they proposed the frequency domain graph convolution method[28]. The Laplacian matrix of the graph structure is defined as , The symmetric normalized Laplacian matrix is defined as
the graph convolution operation can be expressed by equation (3)
where is the orthogonal matrix composed of the feature vectors of the Laplacian matrix L by column, is a diagonal matrix consisting of parameter , representing the parameter to be learned. The above is the general form of graph convolution, but equation (3) is computationally intensive, because the complexity of the eigenvector matrix is , therefore, Hammond et al [29] showed that this process can be obtained by fitting a Chebyshev polynomial, as in equation (4)
where and is the largest eigenvalue of , is the vector of Chebyshev coefficients. In order to reduce the computational effort, the literature [30] only calculates up to K = 1, is approximated as 2, then we have
In addition, self-normalization is introduced
where ,, finally, the graph convolution is
2.4. SE Attention Mechanism
The attention mechanism can filter key information from the input images and enhance the accuracy of the model with limited computational capability. Therefore, we applied the attention mechanism to the convolutional branch. For simplicity, we chose the SE attention mechanism. The SE module consists of three steps.Firstly, the compression operation, which performs feature compression from the spatial dimension to turn the feature of H×W×B into a 1×1×B feature. Secondly, the excitation operation, which generates weights for each feature channel by introducing the w parameter. Finally, the weights output from the excitation block are considered as the importance of each feature channel after selection, and the weights of each channel calculated by the SE module are multiplied with the two-dimensional matrix of the corresponding channel of the original feature map to complete the rescaling of the original features in the channel dimension, so as to highlight the important features. As shown in Figure 3.
2.5. Superpixel segmentation and feature conversion module.
GCN can only be applied on graph structured data, and in order to apply GCN to hyperspectral images, the hyperspectral image needs to be constructed as a graph structure first. The simplest method is to consider each pixel of the image as each node of the graph structure, but this method leads to huge computational cost. So it is common to first apply superpixel segmentation to the HSI.
Currently, common superpixel segmentation algorithms include SLIC[31], QuickShift[32], Mean-Shift[33]. Among them, the SLIC algorithm assigns image pixels to the nearest clustering centers to form superpixels based on the distance and color difference between pixels, and this method is computationally simple and has excellent results compared with other segmentation methods.
In general, the SLIC algorithm has only one parameter, the number of superpixels K. Suppose an image with M pixel is expected to be partitioned into K superpixel blocks, then each superpixel block contains M/K pixels. Under the assumption that the length and width of each superpixel block are uniformly distributed the length and width of each superpixel block can be defined as S, S = sqrt(M /K).
Secondly, in order to avoid the seed points falling on noisy points or line edges of the image and thus affecting the segmentation results, the positions of the seed points are also adjusted by recalculating the gradient values of the pixel points in the 3×3 neighborhood of each seed point and setting the new seed point to the minimum gradient in that neighborhood.
Finally, the new clustering centers are calculated iteratively by clustering. The pixel points in the 2S×2S region around the centroid of each superpixel block are traversed. After that, each pixel is divided into the superpixel blocks closest to it, and thus an iteration is completed. The coordinates of the centroid of each superpixel block are recalculated and iterated, and convergence is usually completed in 10 iterations.
In this paper, the number of superpixel is not the same in each dataset, but varies according to the total number of pixels in the dataset, for which the number of superpixels is specified as , where H and W are the length and width of the dataset, and is a segmentation factor to control the number of superpixels, which is 100 in this paper.
It is worth noting that since each superpixel has a different number of pixels, since the data structures of the two branches are different, the CNN branch and the GCN branch cannot be fused directly. Inspired by [25], we apply a data transformation module that allows the features obtained from the GCN branch to be fused with the features from the CNN branch, as shown in Figure 4.
denotes the i-th pixel in the flattened HSI, and denotes the average radiance of the pixels contained in the superpixels , let be the association matrix between pixels and superpixels, where Z denotes the number of superpixels, then we have
where , denotes the value of at association matrix, denotes the i-th pixel in . Finally, the feature conversion process can be represented by
where denotes the normalized by column, denotes restoring the spatial dimension of the flattened data. denotes the nodes composed of superpixels, denotes the feature converted back to Euclidean domains. In summary, features can be projected from the image space to the graph space using the graph encoder. Accordingly, the graph decoder can assign node features to pixels.
3. Experiments and discussion
The overall accuracy (OA), average accuracy (AA), kappa coefficient (kappa) and Mean Intersection over Union(MIoU) were employed as the evaluation indices of the classification performance.
3.1. Experimental Data Sets
To evaluate the effectiveness of the model, three commonly used hyperspectral datasets: Indian Pines(IP), Pavia University(PU) and Salinas(SA) were used to evaluate the FCGN algorithm in this paper.
The IP dataset was acquired by the Airborne Visible/Infrared Imaging Spectrometer (AVIRIS) sensor over the northwestern Indian region. This dataset contains 145×145 pixels with 220 spectral bands ranging from 0.4-2.5µm. After removing 20 water absorption and noisy spectral bands, 200 bands are reserved for the experiment. The land cover scene consists of 16 classes with 10,366 labeled pixels. The dataset is divided into training, validation, and test sets, for this dataset, the sample size is relatively small and the number of samples of each class is extremely unbalanced. 5%, 1%, and 94% of samples per class are randomly selected for training, validation, and testing, as presented in Table 1.
The PU dataset was captured by the reflective optics system imaging spectrometer (ROSIS) sensor in the Pavia University. This dataset contains 610×340 pixels with 125 spectral bands ranging from 0.43-0.86µm. 103 bands are utilized after discarding noisy bands. There are 9 land cover categories in this dataset.0.5%, 0.5%, and 99% of samples per class are randomly selected for training, validation, and testing, as listed in Table 2.
The SA dataset is another commonly used dataset for hyperspectral image classification. It was recorded by the AVIRIS sensor over the Salinas Valley. This dataset contains 512×217 pixels with 224 spectral bands and 204 bands are utilized. There are 16 land cover categories in this dataset. Because this dataset has a larger number of samples compared with Indian Pines, so 0.5% of the labeled samples are selected as the training set and the validation set, and 99% of samples per class are randomly selected for testing, as listed in Table 3.
3.2. Experimental Settings
The proposed architecture consists of three modules, the number of layers in the spectral dimension reduction module, graph convolution branch and convolution branch are all set to 2. The spectral dimension reduction modules starts with two 1 × 1 convolution layers (128 filters and 128 filters). The size of the convolution kernels in the CNN branch are set to 3 ×3 (128 and 64 filters), and the sample output dimension in GCN branch are set to 128 and 64. We use Adam optimizer to train our model with a learning rate 0.001 and the training epoch is set to 500. The number of superpixels for each dataset is set to 1/100 of the number of pixels.
The proposed algorithm is implemented in Python 3.8.12 and Pytorch1.1.0 using the Python language. The hardware used for training is an i7-10750H CPU and a NVIDIA GeForce RTX 2060s GPU.
3.3. Classifification Results
To verify the performance of the model, several advanced HSI classification methods were selected for comparison with this model, including 3D-CNN[34], GCN[21], MiniGCN[20], HybirdSN[16], DBDA[17] and MDGCN[24]. The number of training samples and test samples selected for each method are the same, and the hyperparameters are the same as in the original paper. The classification accuracies of the different methods on each dataset are showed in Table 4, Table 5 and Table 6, and the classification maps obtained by these methods are illustrated in Figure 5, Figure 6 and Figure 7.
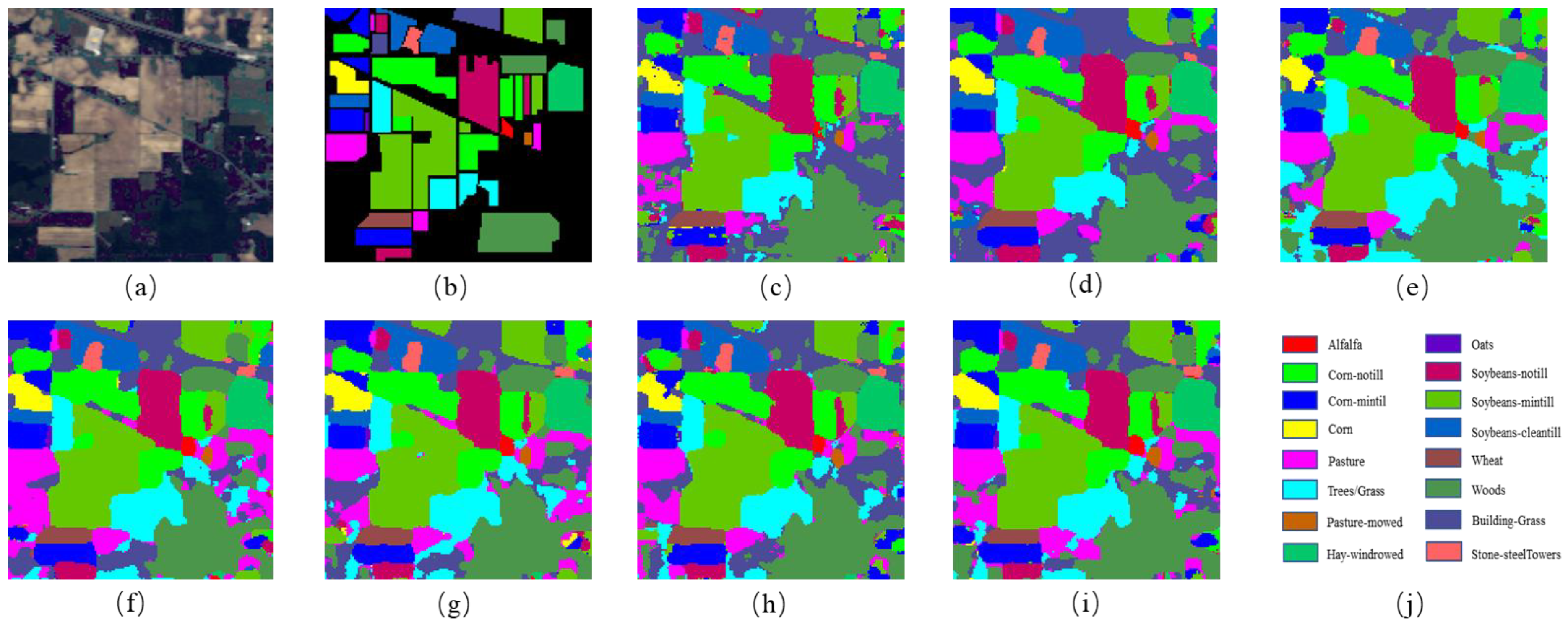
For the IP dataset. Table 4 shows the classification results of the different models on the IP dataset. The lack of training samples on the IP dataset and the imbalance in the number of samples from different categories makes classification challenging, but our classification method obtained the best classification results. It can be observed that the classification accuracy obtained by 3D-CNN is lower than other methods, which might be due to the fact that 3D-CNN has more parameters, but the number of training samples is small in this experiment, and another reason might be that it does not take full advantage of the relationship information contained in the samples, which eventually leads to poor classification results. HybirdSN combines 3D-CNN layers with 2D-CNN layers, which has stronger feature representation capability by combining spatial and spectral information and lower number of parameters, but the accuracy is still lower in the case of small number of samples. DBDA contains two branches to obtain spatial-spectral features respectively, and introduces the attention mechanism into it and eventually achieves better classification results than HybirdSN. The GCN-based classification method can generally obtain better classification results with a smaller number of samples. MiniGCN adds a convolutional branch and adopts a small batch strategy compared with GCN, and achieves better classification results, but without taking into account the different importance of different features. In contrast, the FCGN obtains the best classification results, which is greatly due to the design of two branches to obtain complementary features, the graph convolution branch based on superpixel segmentation can obtain the large scale irregular features of the image and the relationship between different nodes, reducing the classification error caused by noise. The convolutional neural network with added attention mechanism can acquire regular image features at small image scale and generate detailed edge features, which complement the smooth features acquired by the superpixel segmentation-based graph convolution branch to obtain better classification results at both large and small scales. The convolution branch is able to process the local fine area to obtain the detailed features of the image, due to the misclassification of pixels, the classification result of the convolution branch contains more noise. By fusing the features of the two branches, the influence of noise on the classification results is greatly reduced. In terms of running time, FCGN has a medium running time compared to other comparison algorithms, it is due to the use of depth-separable convolution algorithm.

Table 4.
Classification results of the IP data set.
| Class | 3DCNN | GCN | MiniGCN | HybirdSN | DBDA | MDGCN | FCGN |
| 1 | 80.00 | 94.66 | 93.73 | 83.44 | 99.51 | 88.88 | 100.00 |
| 2 | 90.16 | 70.37 | 72.54 | 80.38 | 93.55 | 96.16 | 96.51 |
| 3 | 80.05 | 66.89 | 76.83 | 82.21 | 94.11 | 94.17 | 98.46 |
| 4 | 86.54 | 86.88 | 98.16 | 99.19 | 96.42 | 92.59 | 97.36 |
| 5 | 84.43 | 89.27 | 93.40 | 96.47 | 97.64 | 96.79 | 97.13 |
| 6 | 79.12 | 93.38 | 92.64 | 98.81 | 96.23 | 99.50 | 100.00 |
| 7 | 67.22 | 92.91 | 88.48 | 86.89 | 96.66 | 96.82 | 92.89 |
| 8 | 90.87 | 96.14 | 97.59 | 98.04 | 91.35 | 95.72 | 98.68 |
| 9 | 70.00 | 100.00 | 99.73 | 73.11 | 89.37 | 99.98 | 100.00 |
| 10 | 79.11 | 85.37 | 75.98 | 90.41 | 70.30 | 85.70 | 97.30 |
| 11 | 90.81 | 68.45 | 79.42 | 74.23 | 90.32 | 96.06 | 98.63 |
| 12 | 72.50 | 78.90 | 79.51 | 91.00 | 97.38 | 98.88 | 95.17 |
| 13 | 70.88 | 99.84 | 98.93 | 71.88 | 97.99 | 97.21 | 99.59 |
| 14 | 85.83 | 85.12 | 87.88 | 98.33 | 98.34 | 99.93 | 99.33 |
| 15 | 92.30 | 82.67 | 89.82 | 94.48 | 96.25 | 96.17 | 95.71 |
| 16 | 69.22 | 97.41 | 100.00 | 70.22 | 86.66 | 94.82 | 97.75 |
| OA(%) | 78.47 | 86.67 | 88.67 | 87.99 | 94.55 | 97.62 | 98.78 |
| AA(%) | 80.57 | 86.77 | 89.04 | 86.82 | 93.26 | 95.58 | 97.80 |
| Kappa | 80.70 | 84.38 | 88.39 | 87.44 | 94.01 | 95.49 | 97.99 |
| MIoU(%) | 73.44 | 78.91 | 84.12 | 83.50 | 90.36 | 92.04 | 95.11 |
| Train time(s) | 250.11 | 59.02 | 342.55 | 220.99 | 298.32 | 1204.15 | 204.50 |
| Test time(s) | 15.04 | 5.60 | 15.38 | 14.51 | 21.77 | 20.33 | 5.92 |
Figure 5.
The classification maps for Indian Pines. (a) False-color image;(b) Ground-truth;(c) 3DCNN;(d) GCN;(e) MiniGCN;(f) HybirdSN;(g) DBDA;(h) MDGCN;(i) FCGN.
Figure 5.
The classification maps for Indian Pines. (a) False-color image;(b) Ground-truth;(c) 3DCNN;(d) GCN;(e) MiniGCN;(f) HybirdSN;(g) DBDA;(h) MDGCN;(i) FCGN.
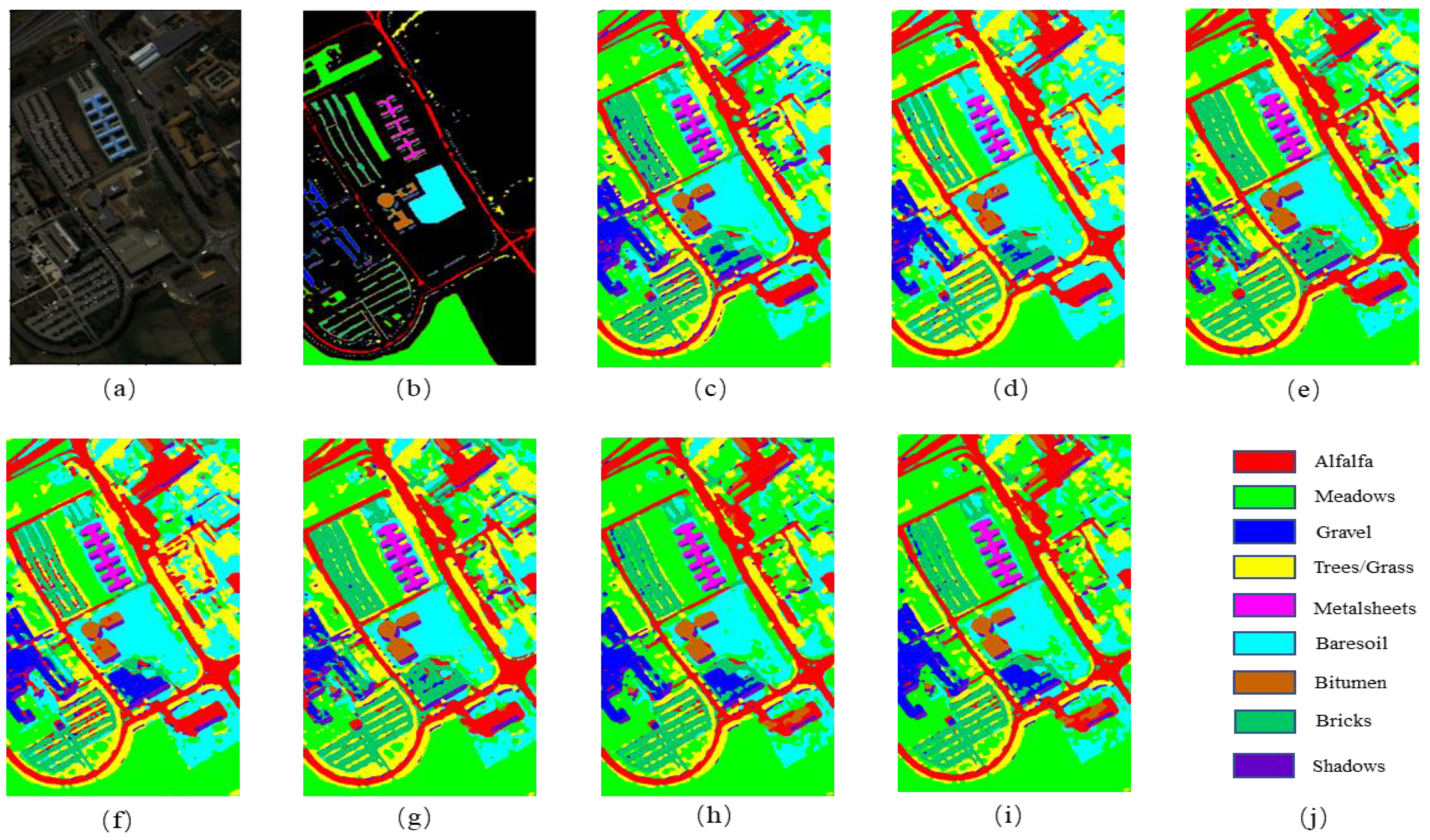
For the Pavia University dataset, Table 5 shows the classification results of the different models on the Pavia University dataset. It can be observed that the classification results of each algorithm have slightly improved relative to those of the IP dataset, which may be because of fewer sample classes in the PU dataset and the number of samples in each class is similar. It is remarkable that DBDA obtains better classification results than HybirdSN, which may result from the two branch structure of HybirdSN and the attention mechanism. FCGN performs better than the compared methods with an OA of 98.99%, because FCGN can fully exploit the features of the samples and the addition of attention mechanism also improves the classification results. The runtime of FCGN algorithm is slightly increased compared to some comparison algorithms, but considering the competitive classification results of this algorithm and the short testing time, the increase in runtime is worth it.
Table 5.
Classification results of the PU data set.
| Class | 3DCNN | GCN | MiniGCN | HybirdSN | DBDA | MDGCN | FCGN |
| 1 | 80.85 | 77.26 | 86.22 | 94.10 | 96.36 | 99.00 | 98.41 |
| 2 | 80.49 | 76.97 | 92.21 | 94.36 | 99.11 | 98.21 | 99.91 |
| 3 | 69.77 | 69.19 | 86.13 | 82.40 | 90.32 | 86.81 | 97.35 |
| 4 | 95.99 | 90.88 | 92.06 | 95.27 | 97.99 | 94.55 | 97.96 |
| 5 | 91.30 | 94.27 | 95.11 | 95.77 | 99.01 | 99.76 | 99.73 |
| 6 | 90.57 | 92.98 | 90.34 | 92.44 | 97.55 | 99.80 | 99.00 |
| 7 | 80.21 | 82.81 | 88.99 | 89.06 | 94.37 | 98.07 | 99.89 |
| 8 | 89.73 | 86.91 | 82.77 | 80.04 | 88.94 | 96.92 | 98.68 |
| 9 | 91.12 | 95.55 | 92.87 | 99.11 | 98.39 | 98.38 | 98.41 |
| OA(%) | 86.33 | 85.41 | 89.67 | 92.99 | 97.22 | 98.22 | 98.99 |
| AA(%) | 85.56 | 85.20 | 89.63 | 92.81 | 95.78 | 96.83 | 98.81 |
| Kappa | 85.21 | 80.37 | 87.09 | 89.98 | 96.72 | 97.27 | 97.90 |
| MIoU(%) | 81.16 | 78.39 | 84.99 | 85.72 | 91.66 | 93.71 | 95.23 |
| Train time(s) | 131.44 | 251.59 | 1058.37 | 122.61 | 145.88 | 3265.31 | 1283.37 |
| Test time(s) | 88.21 | 17.33 | 50.15 | 65.48 | 118.37 | 57.29 | 38.94 |
Figure 6.
The classification maps for Pavia University. (a) False-color image; (b) Groundtruth; (c) 3DCNN; (d) GCN; (e) MiniGCN; (f) HybirdSN; (g) DBDA; (h) MDGCN; (i) FCGN.
Figure 6.
The classification maps for Pavia University. (a) False-color image; (b) Groundtruth; (c) 3DCNN; (d) GCN; (e) MiniGCN; (f) HybirdSN; (g) DBDA; (h) MDGCN; (i) FCGN.
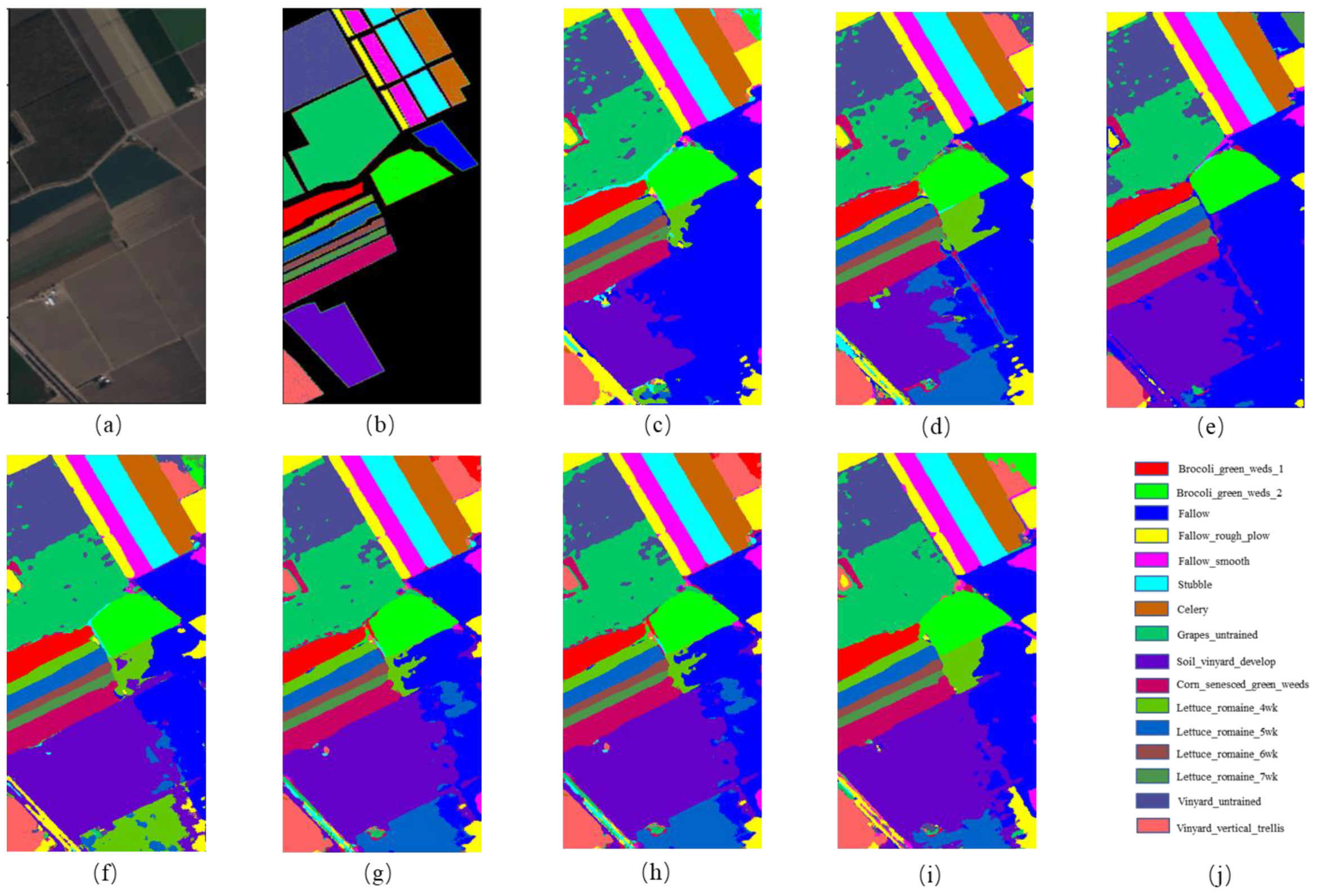
For the Salinas dataset. Table 6 shows the classification results of the different models on the Salinas dataset. We can see that FCGN is superior to other methods in terms of OA, AA, and Kappa coefficient, this proves the effectiveness of the FCGN algorithm again. We can see from Figure 6 that the FCGN method has fewer misclassified pixels than other methods and is more accurate for classifying large scale regions.
Table 6.
Classification results of the SA data set.
| Class | 3DCNN | GCN | MiniGCN | HybirdSN | DBDA | MDGCN | FCGN |
| 1 | 88.31 | 98.64 | 96.19 | 99.34 | 99.62 | 100.00 | 99.74 |
| 2 | 88.35 | 98.99 | 99.02 | 98.61 | 99.14 | 100.00 | 100.00 |
| 3 | 82.01 | 73.84 | 86.32 | 94.38 | 97.45 | 99.16 | 100.00 |
| 4 | 84.02 | 99.49 | 98.32 | 97.04 | 94.77 | 100.00 | 99.82 |
| 5 | 87.76 | 99.66 | 96.35 | 98.24 | 98.02 | 94.32 | 97.71 |
| 6 | 91.42 | 99.97 | 99.55 | 99.03 | 99.99 | 99.98 | 98.98 |
| 7 | 90.94 | 93.54 | 98.54 | 96.89 | 97.62 | 98.85 | 99.99 |
| 8 | 80.07 | 94.70 | 91.40 | 86.55 | 87.35 | 86.18 | 94.25 |
| 9 | 94.88 | 100.00 | 99.74 | 99.12 | 89.37 | 99.97 | 99.97 |
| 10 | 88.76 | 70.82 | 84.25 | 89.89 | 89.57 | 93.84 | 96.68 |
| 11 | 83.62 | 80.85 | 83.51 | 91.23 | 90.32 | 98.29 | 99.01 |
| 12 | 87.99 | 95.05 | 94.99 | 97.92 | 97.38 | 94.98 | 99.99 |
| 13 | 72.15 | 94.94 | 89.47 | 99.46 | 98.99 | 97.00 | 99.36 |
| 14 | 73.05 | 97.82 | 98.94 | 97.66 | 95.69 | 97.12 | 99.10 |
| 15 | 91.34 | 54.25 | 67.39 | 81.47 | 86.77 | 95.92 | 94.56 |
| 16 | 92.96 | 65.60 | 64.61 | 99.28 | 96.34 | 98.65 | 98.67 |
| OA(%) | 86.30 | 91.47 | 91.76 | 96.25 | 92.55 | 96.80 | 98.69 |
| AA(%) | 86.10 | 90.92 | 90.53 | 95.38 | 94.90 | 97.14 | 98.61 |
| Kappa | 85.09 | 88.01 | 88.39 | 92.09 | 93.37 | 95.34 | 97.18 |
| MIoU(%) | 80.83 | 84.13 | 83.77 | 88.59 | 90.08 | 92.11 | 95.13 |
| Train time(s) | 153.09 | 269.04 | 1094.67 | 146.96 | 176.55 | 3377.41 | 1357.15 |
| Test time(s) | 93.37 | 23.02 | 57.47 | 72.72 | 120.17 | 65.33 | 42.46 |
Figure 7.
The classification maps for Salinas. (a) False-color image; (b) Ground truth; (c) 3DCNN; (d) GCN; (e) MiniGCN; (f) HybirdSN; (g) DBDA; (h) MDGCN; (i) FCGN.
Figure 7.
The classification maps for Salinas. (a) False-color image; (b) Ground truth; (c) 3DCNN; (d) GCN; (e) MiniGCN; (f) HybirdSN; (g) DBDA; (h) MDGCN; (i) FCGN.
4. Discussion
4.1. Influence of Label Ratio
To evaluate the generalizability and robustness of the proposed FCGN and other methods, we set the number of training samples per class from 5 to 25 with an interval of 5. Figure 8 shows the OA obtained by the different methods on the three datasets. It can be observed that the proposed FCGN achieves better classification accuracy than other methods, and the classification accuracy of each method improves as the number of training samples increases, which proves the great robustness of the proposed FCGN.
4.2. Influence of segmentation factor
The larger the segmentation factor, the smaller the number of superpixels and therefore the larger the size of the superpixels, preserving larger objects and suppressing more noise. Conversely, the smaller the segmentation factor, the larger the number of superpixels, the smaller the size of the segmentation map obtained, preserving smaller objects and containing more noise.
In order to investigate the influence of the number of super pixel blocks on the performance of FCGN, in this section, the segmentation coefficients are set to 50, 100, 150 and 200, and the influence of different segmentation factors on the classification accuracy of FCGN is tested on the three datasets, as shown in Figure 9. It can be seen that the classification accuracy of FCGN on the IP dataset decreases with the increase of the segmentation coefficients, which is due to the fact that the samples in the IP dataset of smaller scale. The size of superpixel is too large, which makes the sample detail information missing. The OA of the PU dataset is similar when the segmentation factor is 50 and 100, and the highest accuracy is achieved when the factor is 100. The sample scale on the SA dataset is much larger, so as the size of the superpixels increases, the classification results do not decrease, but rather more noise effects are removed, making the accuracy increase. However, when the segmentation factor reaches a certain size, the classification accuracy is bound to decrease gradually. In order to prevent the classification map from being smooth and missing too much detail information, the segmentation factor is set to 100 in this chapter.
4.3. Ablation Study
The proposed FCGN mainly contains a graph convolutional branch based on superpixel segmentation and a convolutional branch with an added attention mechanism. To further validate the contribution of the two branches, we tested the OA of the two branches on three datasets separately. In addition, we tested the impact of the attention mechanism. We can intuitively see from Table 7 that the overall classification accuracy decreases when any branch is missing, which proves that the complementary features obtained by combining the graph convolution branch and the convolution branch can indeed improve the classification performance. We can also observe that the addition of attention mechanisms has some improvement on the classification results, which indicates that by adding appropriate attention mechanisms to the network, we can obtain the importance of different features and capture long-range features and high-level features to improve the classification results.
5. Conclusions
In recent years GCN has been applied in the field of hyperspectral image classification by virtue of its ability to process graph structured data. Compared with CNN, GCN is able to extract the structural features and capture the relationships between the nodes in irregular image regions. In order to reduce the computational complexity, superpixel segmentation is often performed on HSI first, however, superpixel segmentation processing leads to similar features within each superpixel node, resulting in a lack of local details in the classification map. To solve the above problems, a new hyperspectral image classification algorithm FCGN is proposed in this paper, in which a graph convolutional network based on superpixel segmentation is fused with an attentional convolutional network for feature fusion, a GCN network based on superpixel segmentation is used to extract superpixel-level features, an attentional convolutional network is used to extract local detail features, and finally the obtained complementary features are used to improve the classification results. In order to verify the effectiveness of the algorithm, experiments are conducted on three datasets and compared with some excellent algorithms. Experimental results showed that FCGN achieved better classification performance. Although FCGN achieves better classification results but there are still some shortcomings, this paper does not consider the variability of different neighbor nodes during the construction of the graph structure, which may limit the ability of the model .In addition, only a simple feature splicing fusion method is used in this paper, so the construction of graph structure and new fusion mechanism will be further explored in the subsequent research.
Author Contributions
Conceptualization, L.G.; methodology, L.G.; software, L.G.; validation, L.G., S.X. and C.H.; formal analysis, L.G.; investigation, L.G.; resources, L.G., S.X. and C.H.; data curation, L.G.; writing—original draft preparation, L.G.; writing—review and editing, L.G.,Y.Y.; visualization, L.G. and S.X.; supervision, C.H.,Y.Y.; project administration, C.H.; funding acquisition, C.H. and Y.Y.; All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Advanced technology industrialization of science and technology cooperation between Jilin Province and Chinese Academy of Sciences (grant number 2020SYHZ0028).
Data Availability Statement
Indian Pines dataset, Pavia University dataset, Salinas dataset (https://www.ehu.eus/ccwintco/index.php/Hyperspectral_Remote_Sensing_Scenes).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Paoletti, M.E.; Haut, J.M.; Plaza, J.; Plaza, A. Deep Learning Classifiers for Hyperspectral Imaging: A Review. ISPRS J. Photogramm. Remote Sens. 2019, 158, 279–317. [Google Scholar] [CrossRef]
- Fauvel, M.; Tarabalka, Y.; Benediktsson, J.A.; Chanussot, J.; Tilton, J.C. Advances in Spectral-Spatial Classification of Hyperspectral Images. Proc. IEEE 2013, 101, 652–675. [Google Scholar] [CrossRef]
- Ma, Z.; Jiang, Z.; Zhang, H. Hyperspectral Image Classification Using Feature Fusion Hypergraph Convolution Neural Network. IEEE Trans. Geosci. Remote Sens. 2021, 1. [Google Scholar] [CrossRef]
- Pan, B.; Xu, X.; Shi, Z.; Zhang, N.; Luo, H.; Lan, X. DSSNet: A Simple Dilated Semantic Segmentation Network for Hyperspectral Imagery Classification. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1968–1972. [Google Scholar] [CrossRef]
- Tan, Y.; Lu, L.; Bruzzone, L.; Guan, R.; Chang, Z.; Yang, C. Hyperspectral Band Selection for Lithologic Discrimination and Geological Mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 471–486. [Google Scholar] [CrossRef]
- Dong, Y.; Liang, T.; Zhang, Y.; Du, B. Spectral–Spatial Weighted Kernel Manifold Embedded Distribution Alignment for Remote Sensing Image Classification. IEEE Trans. Cybern. 2021, 51, 3185–3197. [Google Scholar] [CrossRef]
- Wu, P.; Cui, Z.; Gan, Z.; Liu, F. Three-Dimensional ResNeXt Network Using Feature Fusion and Label Smoothing for Hyperspectral Image Classification. Sensors 2020, 20, 1652. [Google Scholar] [CrossRef] [PubMed]
- Farooque, G.; Xiao, L.; Yang, J.; Sargano, A.B. Hyperspectral Image Classification via a Novel Spectral–Spatial 3D ConvLSTM-CNN. Remote Sens. 2021, 13, 4348. [Google Scholar] [CrossRef]
- Peng, J.; Zhou, Y.; Chen, C.L.P. Region-Kernel-Based Support Vector Machines for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4810–4824. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random Forest in Remote Sensing: A Review of Applications and Future Directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Zhang, M.-L.; Zhou, Z.-H. ML-KNN: A Lazy Learning Approach to Multi-Label Learning. Pattern Recognit. 2007, 40, 2038–2048. [Google Scholar] [CrossRef]
- Audebert, N.; Le Saux, B.; Lefevre, S. Deep Learning for Classification of Hyperspectral Data: A Comparative Review. IEEE Geosci. Remote Sens. Mag. 2019, 7, 159–173. [Google Scholar] [CrossRef]
- Paoletti, M.E.; Haut, J.M.; Plaza, J.; Plaza, A. A New Deep Convolutional Neural Network for Fast Hyperspectral Image Classification. ISPRS J. Photogramm. Remote Sens. 2018, 145, 120–147. [Google Scholar] [CrossRef]
- Acción, Á.; Argüello, F.; Heras, D.B. Dual-Window Superpixel Data Augmentation for Hyperspectral Image Classification. Appl. Sci. 2020, 10, 8833. [Google Scholar] [CrossRef]
- Hu, W.; Huang, Y.; Wei, L.; Zhang, F.; Li, H. Deep Convolutional Neural Networks for Hyperspectral Image Classification. J. Sens. 2015, 2015, e258619. [Google Scholar] [CrossRef]
- Roy, S.K.; Krishna, G.; Dubey, S.R.; Chaudhuri, B.B. HybridSN: Exploring 3-D–2-D CNN Feature Hierarchy for Hyperspectral Image Classification. IEEE Geosci. Remote Sens. Lett. 2020, 17, 277–281. [Google Scholar] [CrossRef]
- Li, R.; Zheng, S.; Duan, C.; Yang, Y.; Wang, X. Classification of Hyperspectral Image Based on Double-Branch Dual-Attention Mechanism Network. Remote Sens. 2020, 12. [Google Scholar] [CrossRef]
- Zhong, Z.; Li, J.; Luo, Z.; Chapman, M. Spectral–Spatial Residual Network for Hyperspectral Image Classification: A 3-D Deep Learning Framework. IEEE Trans. Geosci. Remote Sens. 2018, 56, 847–858. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X. Dual-Coupled CNN-GCN-Based Classification for Hyperspectral and LiDAR Data. Sensors 2022, 22, 5735. [Google Scholar] [CrossRef]
- Hong, D.; Gao, L.; Yao, J.; Zhang, B.; Plaza, A.; Chanussot, J. Graph Convolutional Networks for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2021, 59, 5966–5978. [Google Scholar] [CrossRef]
- Kipf, T.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. arXiv 2017, arXiv:1609.02907. [Google Scholar]
- Full Article: Graph Inductive Learning Method for Small Sample Classification of Hyperspectral Remote Sensing Images. Available online: https://www.tandfonline.com/doi/full/10.1080/22797254.2021.1901064 (accessed on 28 January 2023).
- W. Yu; S. Wan; G. Li; J. Yang; C. Gong Hyperspectral Image Classification With Contrastive Graph Convolutional Network. IEEE Trans. Geosci. Remote Sens. 2023, 1. [Google Scholar] [CrossRef]
- Wan, S.; Gong, C.; Zhong, P.; Du, B.; Zhang, L.; Yang, J. Multiscale Dynamic Graph Convolutional Network for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3162–3177. [Google Scholar] [CrossRef]
- Liu, Q.; Xiao, L.; Yang, J.; Wei, Z. CNN-Enhanced Graph Convolutional Network With Pixel- and Superpixel-Level Feature Fusion for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8657–8671. [Google Scholar] [CrossRef]
- F. Chollet Xception: Deep Learning with Depthwise Separable Convolutions. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); July 21 2017; pp. 1800–1807.
- J. Hu; L. Shen; G. Sun Squeeze-and-Excitation Networks. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition; June 18 2018; pp. 7132–7141.
- D. I. Shuman; S. K. Narang; P. Frossard; A. Ortega; P. Vandergheynst The Emerging Field of Signal Processing on Graphs: Extending High-Dimensional Data Analysis to Networks and Other Irregular Domains. IEEE Signal Process. Mag. 2013, 30, 83–98. [CrossRef]
- Hammond, D.K.; Vandergheynst, P.; Gribonval, R. Wavelets on Graphs via Spectral Graph Theory. Appl. Comput. Harmon. Anal. 2011, 30, 129–150. [Google Scholar] [CrossRef]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering 2017.
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Ma, Z.; Zhang, G.; Lei, T.; Zhang, R.; Cui, Y. Semantic Image Segmentation with Deep Convolutional Neural Networks and Quick Shift. Symmetry 2020, 12, 427. [Google Scholar] [CrossRef]
- Comaniciu, D.; Meer, P. Mean Shift Analysis and Applications. In Proceedings of the Proceedings of the seventh IEEE international conference on computer vision; IEEE, 1999; Vol. 2, pp. 1197–1203.
- Chen, Y.; Jiang, H.; Li, C.; Jia, X.; Ghamisi, P. Deep Feature Extraction and Classification of Hyperspectral Images Based on Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6232–6251. [Google Scholar] [CrossRef]
Figure 1.
The framework of the FCGN algorithm. (a1) and (a2) Feature conversion module;(b1) and (b2) SE attention module.
Figure 1.
The framework of the FCGN algorithm. (a1) and (a2) Feature conversion module;(b1) and (b2) SE attention module.
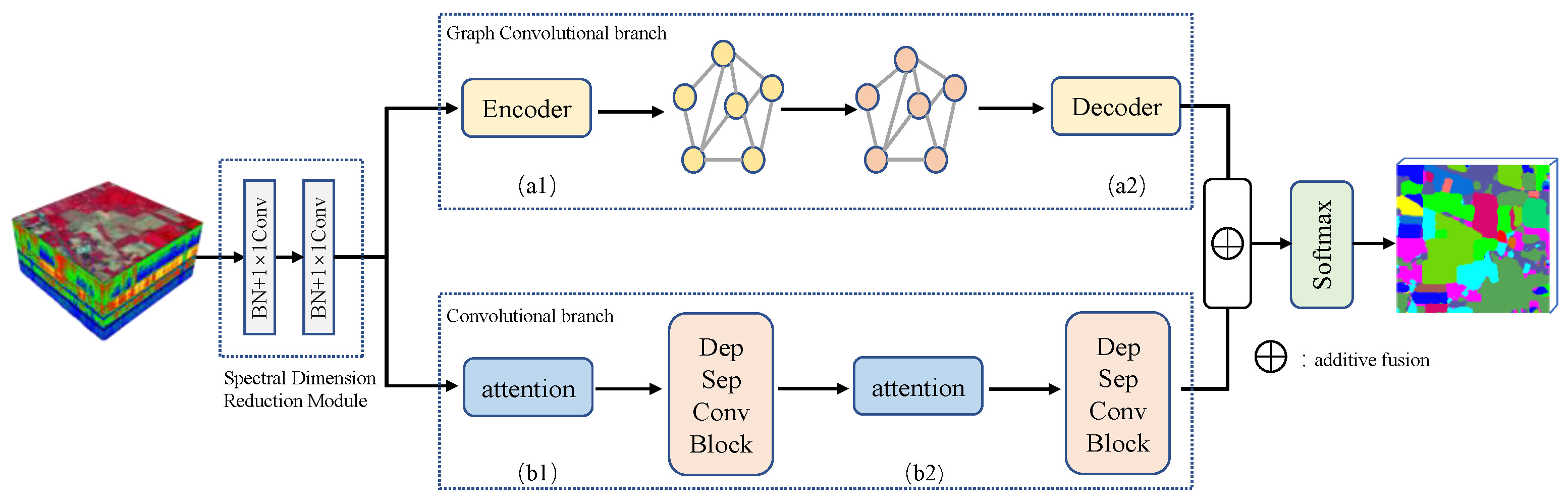
Figure 2.
Dimension reduction module.
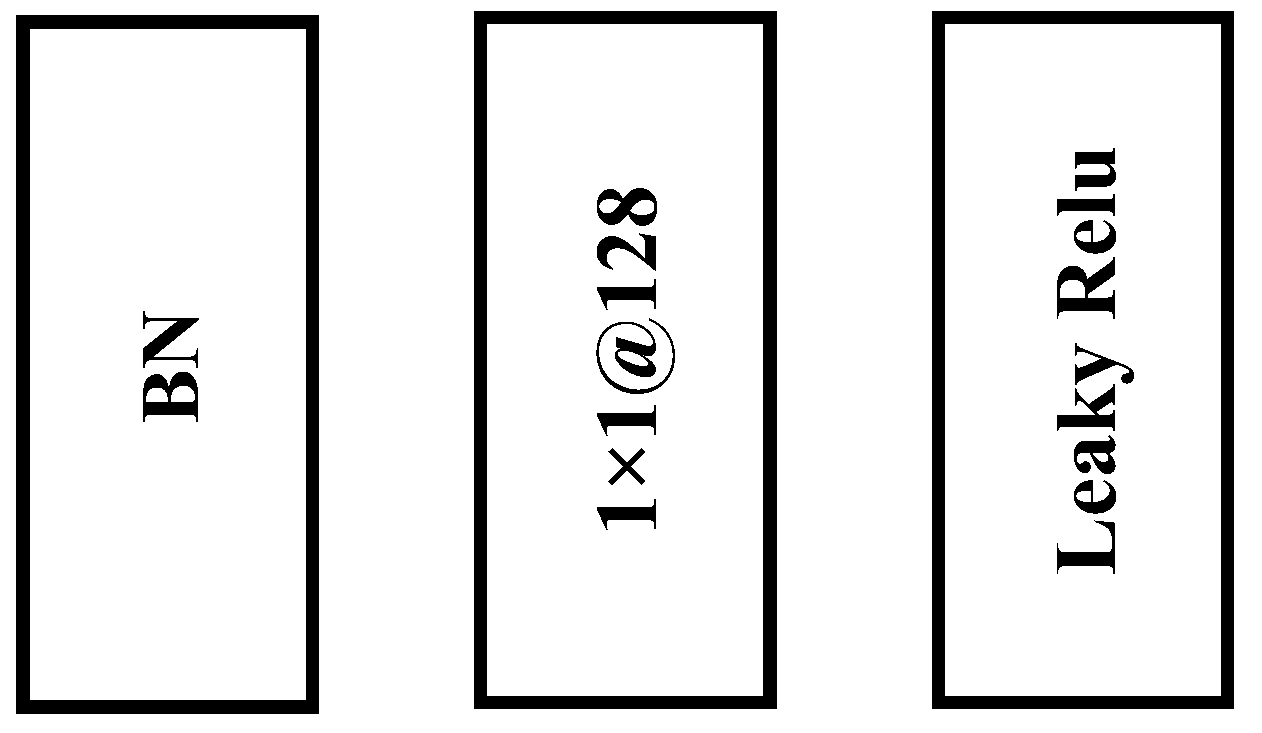
Figure 3.
SE Module.

Figure 4.
Pixel and superpixel data conversion module.
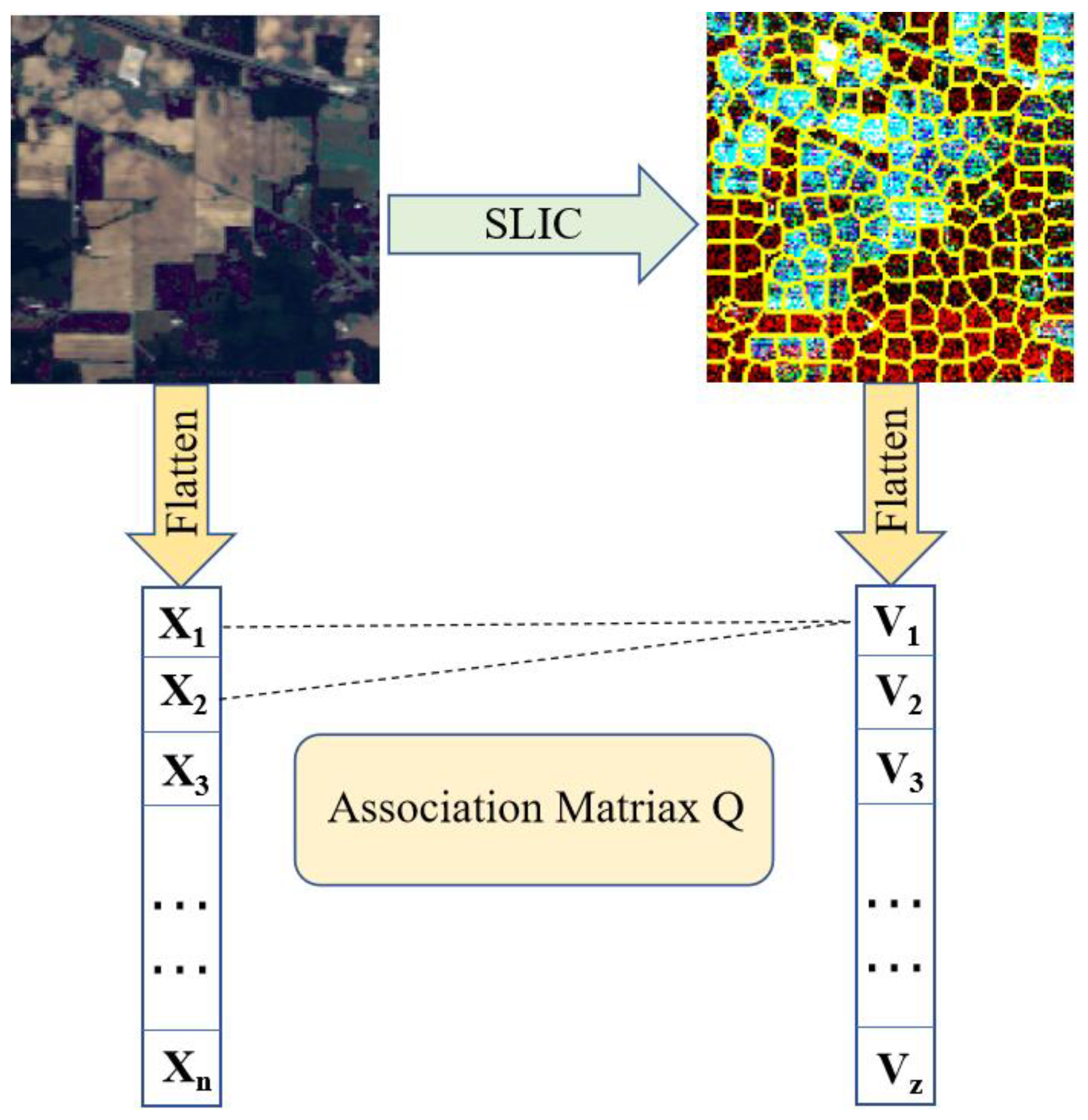
Figure 8.
The classification performance of each method with different training set ratios. (a) India Pines; (b) Pavia University; (c) Salinas.
Figure 8.
The classification performance of each method with different training set ratios. (a) India Pines; (b) Pavia University; (c) Salinas.
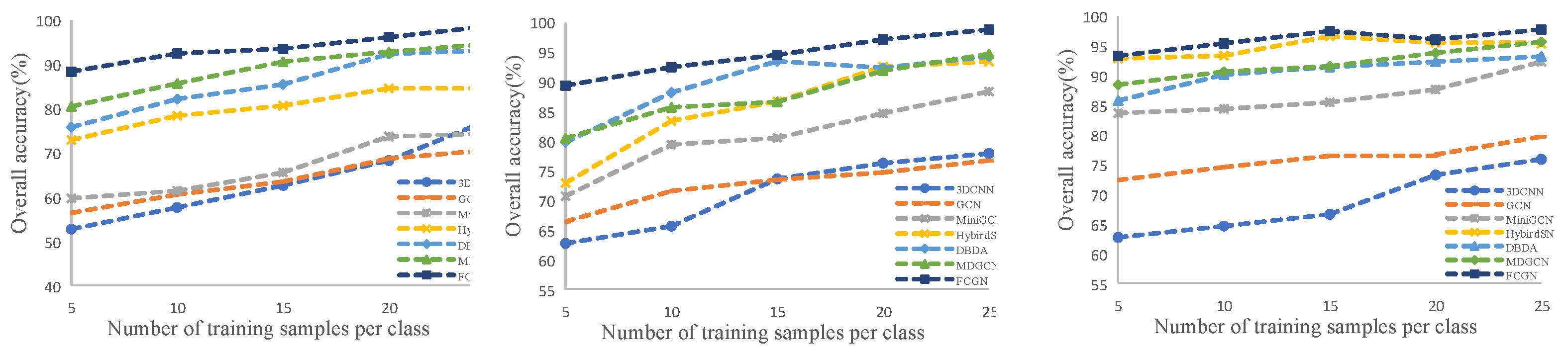
Figure 9.
The classification performance with different segmentation factor. (a) India Pines; (b) Pavia University; (c) Salinas.
Figure 9.
The classification performance with different segmentation factor. (a) India Pines; (b) Pavia University; (c) Salinas.
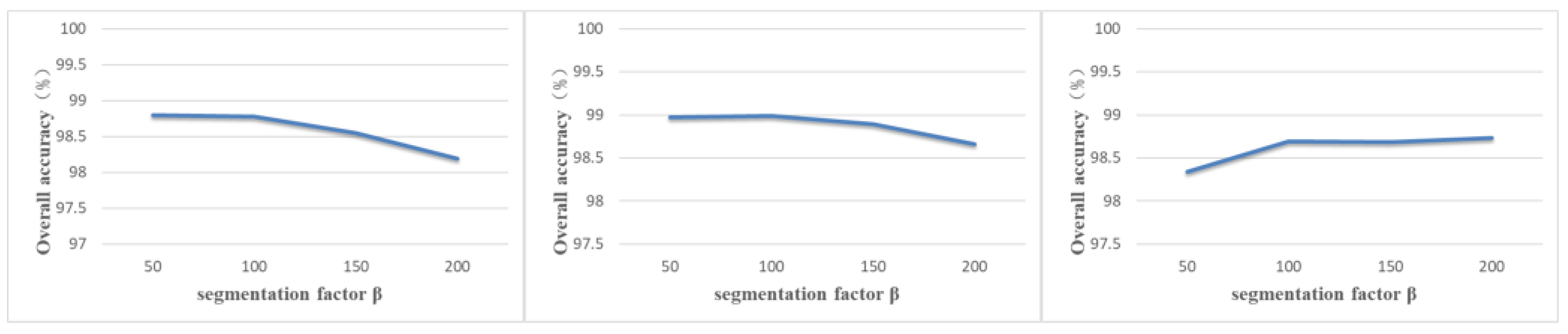
Table 1.
The data set division for each class of IP dataset.
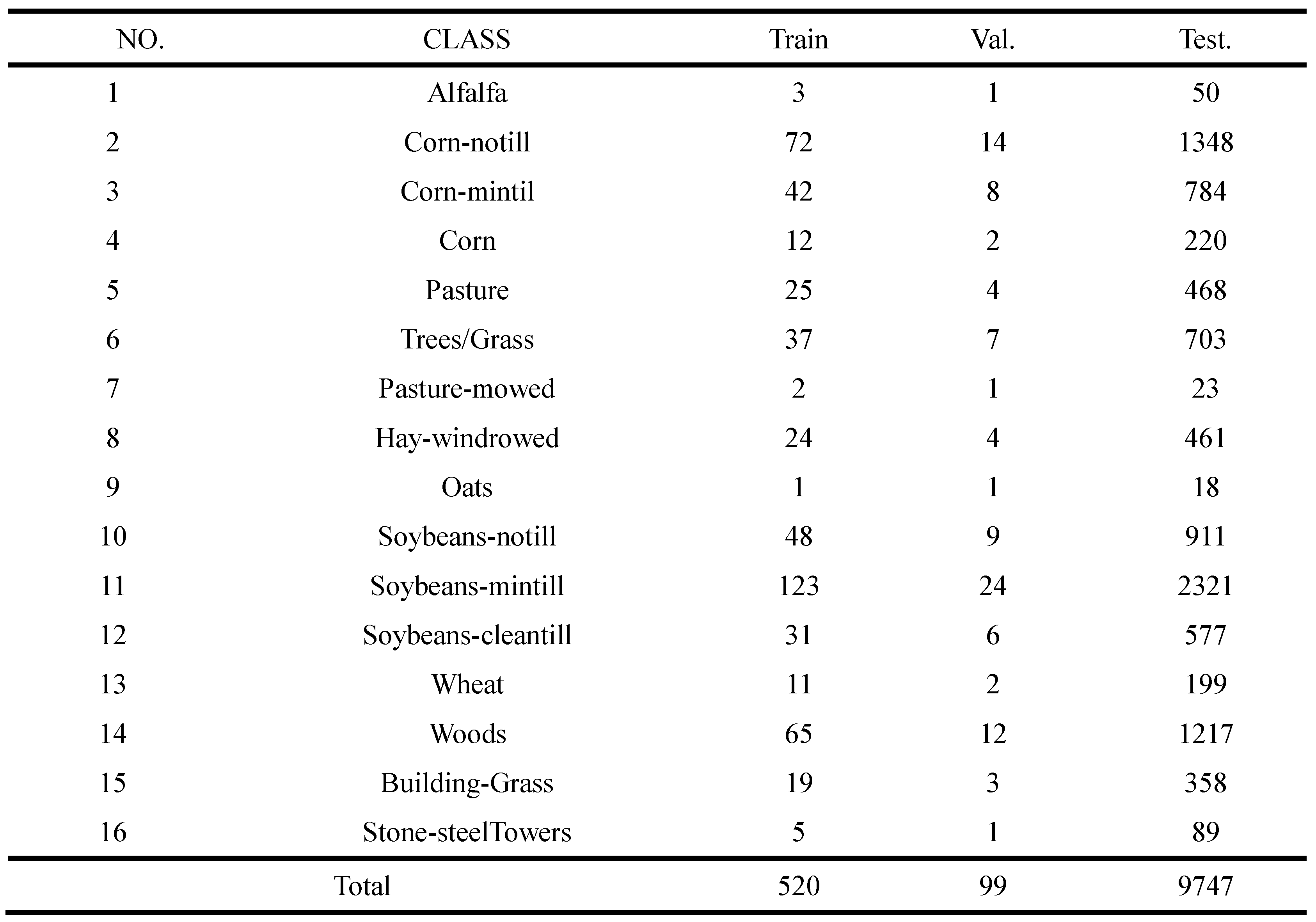
Table 2.
The data set division for each class of PU dataset.
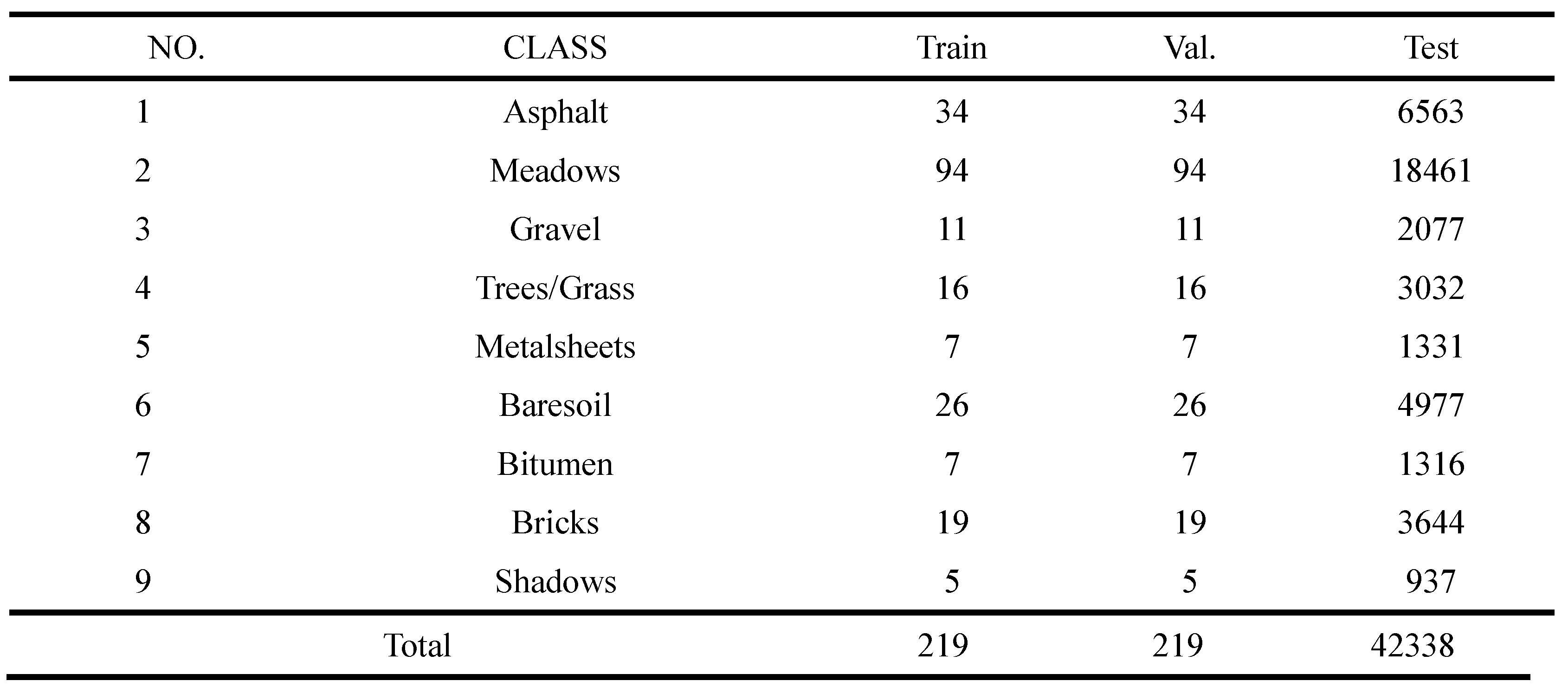
Table 3.
The data set division for each class of SA dataset.
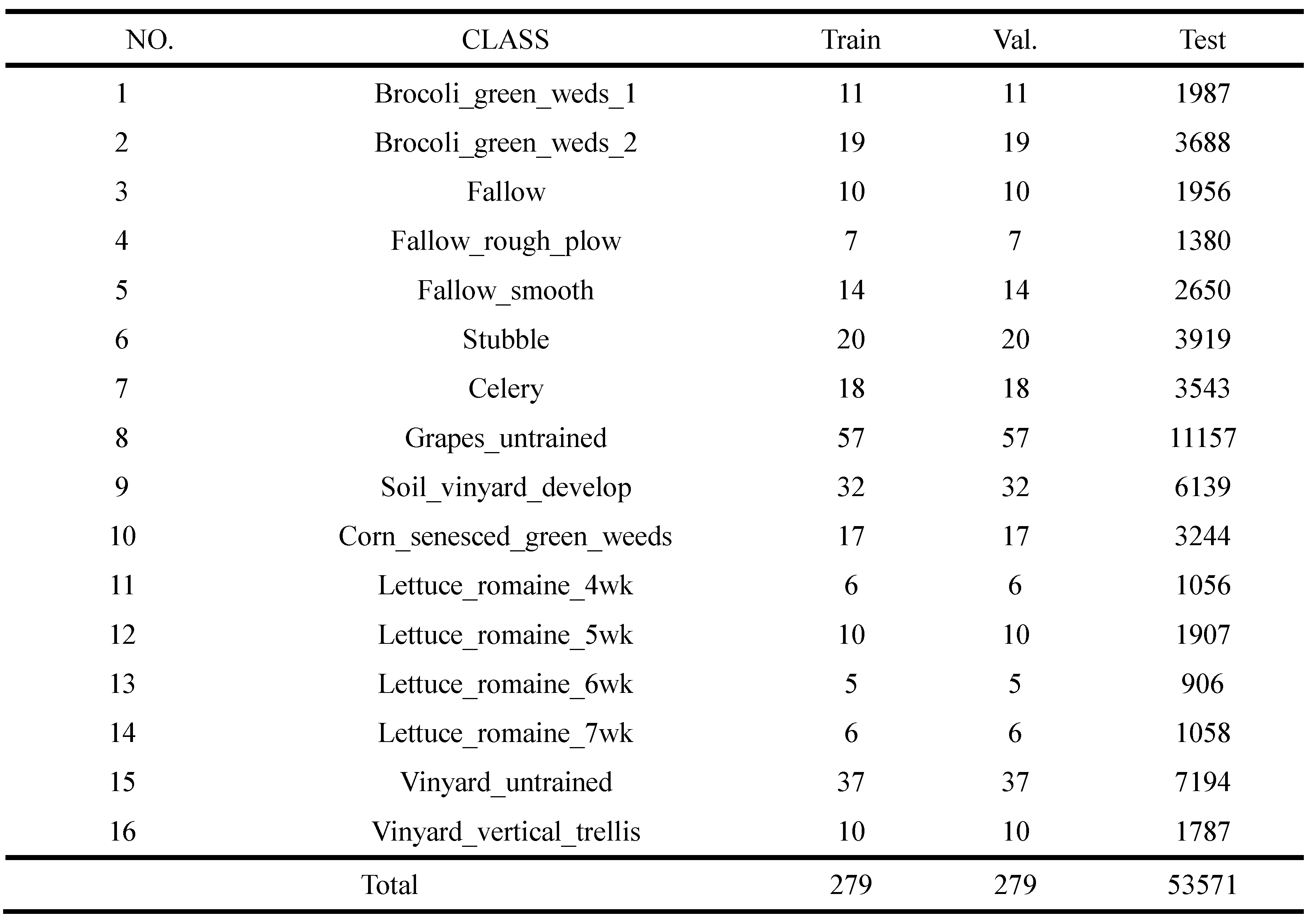
Table 7.
The data set division for each class of SA dataset.

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



