Submitted:
17 May 2023
Posted:
17 May 2023
You are already at the latest version
Abstract
Root crops grow in the soil deeply and bond with soil closely, which results in that the process of the separation between soil and root becomes the most difficult during the harvesting processes. In order to harvest root crops efficiently, the mechanical harvesting has become the main developing trend. However, high power and high damage rate are still occurred when mechanical harvester gets in touch with the roots. In this paper, we review the research of the development and evaluation of the mechanical harvesting of root crops and its performance optimization on the past years. The process of soil separation mainly consists in the initial separation between root and the ground and further separation between root and adhered soil. In general, the soil-cutting operation in the initial separation and the sieving mechanism in the further separation require high draught and power. And the dramatic friction, impact, pressure and so on, which happen in the components and soil-roots, are the key reasons to lead to root damage. The optimization of harvesting methods and parameters, including the digging shovel shape, working conditions, vibration, and screening way, is more significant in improving the harvesting performance. But there are still some limitations in the research and application of the mechanical harvester for root crops. Future research is suggested to focus on the development of the soil break-up when the digging shovel cutting soil, the insight into the interaction between soil and roots by different external compression loads, and the long-term studies to verify the high-efficiency and low-damage performances of mechanical harvester in practical application.
Keywords:
Root crops
; Evaluation
; Mechanical harvesting
; Optimization
1. Introduction
The root crop can be mainly classified by stem’s length, as follows: short-stemmed, long-stemmed, tuberous root and so on. It can also be classified by the growing depth of the crop: shallow-rooted (less than 20 cm), middle depth-rooted (20 ~ 40 cm) and deep-rooted (more than 40 cm) [1]. The typical examples of root crops are classified and shown in Figure 1. Different places’ working conditions and planting agronomic requirements need different structures and operation parameters of harvester. Especially in the case of the traditional Chinese medicinal materials, the deep growing depth would cause tremendous load to the harvester. Efforts continue to be made towards the development of agricultural machinery for root harvesting. The reason is the manual labor in harvesting, which presents issues, such as high demand of labor force, low harvesting rate, high damage rate, and high digging cost. A higher degree of mechanical operation in the harvesting process could address the high demand of labor force and high digging cost problems. Moreover, automatic agricultural machinery could control the force more precisely than a human operator, which can lower the damage rate to a certain extent. In conclusion, the mechanical operation in the harvesting process is the main developing trend of the root crop harvesting.
The mechanical harvesting process could be generally described as a two-stage separation. The purpose of the first separation is mainly to plow and loosen the soil. The aim is to facilitate the extraction of the root from the planting field, thus increasing the harvesting rate. There are mainly two ways to realize the first separation: digging and extraction. Some of the root crops have weak epidermis which makes them vulnerable to the first separation, leading to a high damage rate. Regarding the digging process, a digging shovel is used to pow and loosen the soil. As the shovel moves towards the soil and inserts the mass, the soil shear stress value rises and when it reaches the failure stress value, the soil is ruptured [2]. At the point where the digging shovel's extrusion attains a certain value, the links of root and soil are destroyed. Depending on the shape of the digging shovel, the following classification can be made: plane shovel, curved-surface shovel, fork-shape shovel, combined shovel [1]. Nowadays, the plane shovel is widely used in the market, because of the simplicity of shape and manufacturing. However, the working resistance and crushing ability are relatively high and low respectively, compared to the other types of shovel. Researchers in the field pick the macroscopic and microcosmic motion of soil, the triangular plane shovel’s stress-strain as the index, while they study the relation between the parameters and the digging performance. Based on the theoretical conclusions and the field test results, the researchers find the optimal shovel’s angle [3]. The curved-surface is enhanced, using bionic technology. The animal extraction physiology structure is simulated by the shovel’s shape. It can not only reduce the working resistance but also enhance the crushing ability. However, the complexity of the shape raises difficulties in manufacturing [4]. Many researchers take the Gryllotalpa orientalis Burmeister, pangolin, boar, etc. as prototype [5,6,7]. They designed the bio-inspired curved-shaped shovel and compared its digging performance, under the same conditions, to the one of the plane shovel. Results showed that the bionic inspired shovel can reduce the working resistance and shows better crushing ability. Figure 2 illustrates the maximum working resistance and the reduction rate of the bionic curved-surface shovel in three cases. The fork-shape shovel can significantly reduce the contact area, reducing the working resistance and enhancing the crushing ability. However, the tooth of this kind of shovel is so susceptive to breaking and fracture. Therefore, it is unsuitable to work in the actual field [1,8]. Regarding the combined shovel, it can also reduce the working resistance and enhance the crushing ability, but the structure is so complex that the manufacturing cost is considerably high. Researchers have designed a combined shovel which is used in Panax notoginseng harvesting. The optimal parameters of this shovel were determined and tested in the actual field. The drag reduction rate, as tested in the field, is as high as 24.29% [9]. Therefore, as the manufacturing technology progresses, the bio-inspired curve-shaped combined shovel is going to be the trend.
The extraction operation is mainly used for some shallow tuber vegetables, such as cabbage, carrot, white radish, etc. It usually involves two types of extraction device: one is the chain, the other is the gum belt. The chain type easily hurts tubers and raises the extraction missing rate. The belt type is flexible in clamping, which makes it more suitable to clamp the tuber and leaf. There are three main parts in this kind of harvester: loose soil device, gripper, cutting device. When the friction between the root crops and gripper is greater than the adhesion between the root crops and soil, the root crops are pulled out of the soil. Researchers designed a gripper, which mainly consists of two parts: stationary clamping mechanism and clamping force adjust mechanism. The stationary clamping mechanism is designed to guarantee greater clamping force. The clamping force adjust mechanism is designed to adjust the clamping force properly [10]. Figure 3 illustrates the structure and principle of the gripper, as well as its forward speed effect regarding the digging performance. Other relative extraction device parameters will also affect the working resistance and damage rate.
In the second phase of separation, the main purpose is to remove the residue soil attached to the root or to the harvester. This sieving process is set to obtain a relatively clean root, according to the harvesting requirement. Based on the different sieving principles, the sieving mechanism can be classified by the geometric size and mechanical strength, plasticity, aerodynamics properties, etc. [11]. Nowadays, the commonly used harvester in the market mainly uses its geometric size and mechanical strength to separate the soil from the root. This type of harvester includes: lifting rod, sieving screen and roller screen. Different structures have different cleaning effect and different ways to cause damage. Hence, by changing the structure of the sieving mechanism can influence the cleaning effect and damage rate. Figure 4 shows the structure and main characteristics of the three main types. Different mechanisms have different parameters, which have different degrees of influence on the cleaning result and damage rate. Therefore, parameter optimization is a way to enhance the cleaning effect and reduce the damage rate.
However, as it has already been mentioned above, the low harvesting rate and high damage rate remain issues to be solved and as such, require the optimization of the harvester structure and working parameters, in both separation stages. There are four major types of damage: skinning, black spot, shatter bruise and pressure bruise. The first three types of damage result from the crop hitting objects. Skinning results from the skin being cuffed and rubbed off, which easily occurs in the vulnerable epidermis crop at any time. In the case of impact of a potato tuber against an object, which damages cells in the tissue just beneath the skin, without actually breaking the skin, black spot bruises are created. Shatter bruise is the result of impact causing cracks or splits in the potato tuber skin. The last type of pressure bruise develops in storage, causing a flattened or depressed area on a potato tuber. This type of damage is not addressed in this paper.
During the digging process, black spot and shatter bruise defects mainly occur when the shovel blade stress is higher than the root effective stress. The reason for the high shovel blade stress is the high working resistance which demands higher shear force from the digging shovel. The impact with the sieving mechanism is the main cause of the black spot and shatter bruise defects, in sieving process. Different parameters and structures of sieving mechanisms will cause different extents of damage. Figure 5 illustrates the cause and classification of the various damage types, in each process phase [12].
When the damages are so serious that the result fails to fulfill the harvest requirement, the low qualified rate effects the harvesting rate indirectly. Therefore, it becomes evident that control and reduction of the damage rate is indeed of high importance. Specifically, during the digging process, minimizing the working resistance and maximizing the crushing ability are really important to lowering the damage rate. Some of the most effective approaches include using vibration type of shovel, changing the relative shovel’s parameters and designing a bio-inspired shovel. As for the sieving process phase, changing the structure and optimizing the parameters are the two principal effective ways to lower the damage rate. Figure 6 shows the main optimal approaches, during the two-phase process of crop harvesting. Description and conclusions of the relative optimization approach in each phase of the process follow.
2. Digging process
The soil crushing and separation technology is widely used for the harvesting of root crops [13,14,15,16,17,18]. More specifically, convex or flat shovel is commonly used in harvester, for breaking up the soil mass and achieving soil-root separation quickly, thus effectively accomplishing the digging job. When the shovel moves towards the soil, the soil will be sheared and fractured gradually, which results in soil loosening as shown in Figure 7. The soil achieves sheared rupture, when the soil shear stress value reaches the failure stress value, while the links of root and soil will be destroyed when the digging shovel's extrusion force attains a certain value. However, the higher digging resistance and damage rate are the most severe problems, during the soil crushing and separation processes. When the tuber’s effective stress is greater than the lowest damage pressure, the tuber will be damaged. To be more specific, the tuber bending deformation is forward and upward, while the tuber’s effective stress gradually increases, as the shovel’s blade is approaching the tuber. The highest value of root effective stress is reached when the blade's tail points at the tuber, which can easily cause damage. In addition, researchers measured soil penetration resistance in three-dimensional penetration graphs and found that the highest penetration resistance is up to 3920 kPa, which is related to the rise of the local topography and the lower soil water content [17]. In relative research work, the digging process was simulated and determined that the average resistance could reach the value of 1207.23 N, while the highest resistance value could be 1929.32 N [9,19].
2.1. Vibration type of shovel
One approach against these challenges is using vibrating soil-cutting tools [20,21,22,23,24]. This type of mechanism needs a power source to excite vibration. Nowadays, the power source can mainly be classified as eccentric mechanism, ultrasonic, hydraulic system and so on. For a tuber harvester, the benefit of using a vibrating digging shovel is the improved soil crushing ability and the reduction of the working resistance, which facilitate soil-tuber separation and reduce tuber damage by soil clods [25,26,27,28,29]. In all vibration mechanisms, the vibration can cause soil liquefaction, thus reducing the friction between the soil particles. The shovel will be easier digging into the soil, in this low resistance situation. Results showed that, both in horizontal and vertical axis, the working resistance developed by the vibrating shovel is much less than the one by the conventional shovel, as shown in Figure 8. The working resistance drops, from 142 N to 84 N, in the case of ultrasonic vibration, which reduce 40.7% [30]. The x and y components of the digging device acceleration can demonstrate whether the requirement of reduced working resistance is fulfilled or not [31]. Researchers concluded that higher vibration frequency can help to increase the possibility of removing the soil away from the shovel face [32,33]. Regarding the soil crushing phase, larger vibration amplitude can improve the crushing ability. Moreover, applying a frequency near the natural soil frequency can also improve the crushing ability [34]. In addition, a penetration angle of the shovel slightly less than or equal to the buried object angle shows to improve the crushing ability. Furthermore, the high frequency of the ultrasonic exhibits a better soil crushing result. Due to the various soil working conditions, the soil characteristics will affect both working resistance and crushing ability. Softer soil reduces the working resistance and decreases the soil crushing ability of the equipment [35]. Therefore, it is necessary to test the soil characteristics, before applying any relative theories and conclusions. Adjusting the parameters of the digging shovel accordingly is an effective way to reduce the digging resistance and enhance the crushing soil ability.
2.2. Optimization of shovel’s parameters and working parameters
According to the theoretical model of soil compression failure and force analysis, the main parameters of the digging shovel are as follow: shovel surface angle, shovel length and width, shovel blade angle. The factor that mostly affects the working resistance is the shovel surface angle. Wider surface angle increases the working resistance. The relation of shovel length and width, the shovel blade angle with the working resistance is the same as the one with the surface angle. As far as the soil crushing ability is concerned, the shovel surface has a positive effect on the crushing rate. Regarding the shovel blade angle and shovel length role, when the shovel blade angle and shovel length increase, the crushing rate first rises and then drops. Based on the above conclusions, relative researchers have chosen the parameters and reduced the working resistance to 5185.76 N and increased the crushing soil ability [31]. However, the operational parameters, such as digging angle, forward velocity, working depth and clay’s adhesion characteristics, also have significant effects on the working resistance and soil crushing ability. According to prior art research work, the increase in digging angle, forward velocity and working depth, all result in the increase of the draught force, which needs to accelerate more soil mass and overcome higher friction. Among all these working parameters, the digging depth exhibits the strongest effect. As for the clay’s adhesion, higher the adhesion coefficient is, higher the working resistance will be and harder to crush the soil. Therefore, it is really necessary to test the relative performance index to find the suitable range of the operation parameters in each case.
2.3. Bio-inspired shovel
Using Engineering bionics theory, to get inspiration from the animal structures, is another approach to reducing the digging resistance and damage rate. These animal structures demonstrate a better crushing soil ability than the normal plane shovel [36,37,38,39,40,41,42]. Especially the soil burrowing animals, in order to adapt to their living conditions, after millions of years of evolution, have developed digging structures with excellent mechanical properties and delicate conformation. In the case of Gryllotalpa orientalis Burmeister, the reduction of working resistance is achieved in two phases, as follows: first, the geometric features of the toe facilitate the insertion of the tip of the toe to the soil; next, the minimal change in the longitudinal contour curvature of the toe ensures the inner wall of the excavated passage is flat [7]. The surface of the pangolin scale shows the non-equal-lattice geometric network morphology with the transverse grooves and longitudinal ridges crossing each other, which is conducive to anti-adhesion [7]. The lubrication mechanism of the earthworm surface dorsal pore and corrugation can reduce the resistance with soil. It was tested and found that the positive pressure is the main factor that affects the soil sliding resistance. Higher the positive pressure is, larger the soil sliding resistance will be [43]. Researchers had designed many bio-inspired digging shovel types, considering wild boar head, oriental mole cricket and pangolin scales as bionic prototypes [5,6,44]. Researchers compared bio-inspired shovel designs to the ordinary plane shovel and concluded that the drag reduction performance of the bio-inspired shovel was better than that of the ordinary plane shovel, demonstrating a 22.26% higher drag reduction rate, during the soil bin test and 14.19% higher drag reduction rate, during the field test. After the shovel digs into the soil, the number of the crushing particles, in the case of the plane shovel, is calculated at 1082820, while in the case of the bio-inspired shovel, this number is 1137793. This experiment illustrates that the bio-inspired shovel has a better crushing ability, which is a prospect worth exploring in the future. Moreover, some of the animal digging structure is hollow, which does not only reduce the weight, but also the deformation from the resistance. Therefore, the hollow structure can be considered more practical. Some types of the vole have excellent biomechanical self-feedback capability, which is extremely favorable for anti-adhesion or reducing resistance during digging.
3. Sieving process
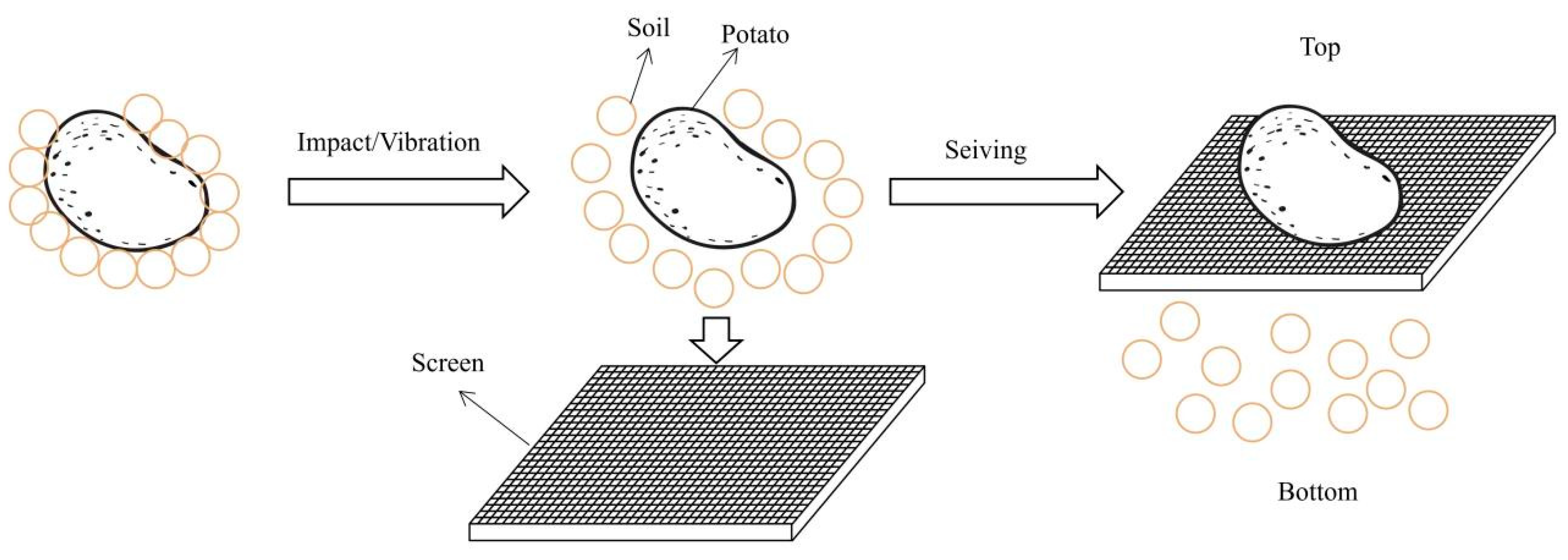
At the end of the digging process, there is still some soil and other impurities attached to the tuber that need to be removed, using the sieving technology, in the second separation phase [49,50,51,52]. Sieve screen can have significant sieving effect on the second separation phase. This mechanism mainly separates based on the different sizes of soil and tuber as shown in Figure 9. Researchers use the mechanism to separate the soil, showing an impressive cleaning effect that reaches even 99.1% [53]. However, the damage rate remained high, during the separation process. In order to solve this problem and improve the cleaning effect, the approach can be seen implemented into two ways: parameters optimization, structure variation.
3.1. Parameters Optimization
One of the ways to enhance the cleaning effect and reduce the damage rate is through parameters optimization. Different structures have different parameters, which need to be tested and the best combination determined. Regarding the lifting chain, relative parameters are as follow: the speed of the first and second stage lift chain, the length of the first and second stage lift chain, the amplitude of the first and second stage vibrator (vibration strength), the tilt of the second stage lift chain, the height between the two stages lift chain [54]. According to prior art research work, the main factors that affect the separation effect may be the tilt of the lift chain and the length of the second stage lift chain. Due to the variations of the soil adhesion and the working conditions in different places, the main factors could vary. Therefore, the soil characteristics and other working conditions are also significant factors, which may alter the main factors and the separation effect. Like the clay in the north part of China, the high adhesion causes relatively low cleaning effect, compared to the south region. Considering all the relative research works, after setting the optimal parameters, the highest separation effect reached 99.1%. As for the damage rate, the speed of the second stage lift chain and the length of the first and second stage lift chain are the main factors. After setting the optimal parameters (length of the second stage lift chain is 3.1m), the lowest damage rate achieved is 1.1%. However, researchers did not include all the parameters as factors, which remains an issue of further research, to compare all the relative factors.
Swing sieve is the most commonly used mechanism in sieving screen. The swing sieve relative parameters are as follow: crank rotation speed, sieve inclination, machine speed [55]. Based on the relative research work, in order to achieve better crushing soil ability, crank rotational speed should be higher and sieve inclination should be larger. Regarding the machine speed, it just needs to be suitable. Among the research works, the highest separation effect is 98.94%, where optimal parameters are as follow: crank rotation speed is at 230r/min, sieve inclination is 21.1 degrees, and machine speed is at 2.03km/h. However, after considering the damage rate, higher rotation speed should be combined with lower sieve inclination, whereas lower rotation speed should be combined with larger sieve inclination. In order to avoid tuber damage, researchers should also test the characteristics of the tuber, to find the suitable range of each parameter. Table. shows the small and medium size potato tubers characteristics and force limit. The lowest damage rate is 0.21%, considering the same optimal parameters as above.
Roller screen shows great prospects in tuber harvesting. In the relative research works, nowadays, the roller screen is widely used in grain and crop harvesting. The main parameters are as follow: digging angle, machine speed, and rotation speed [11]. Researchers tested the movement of material in roller screen and found the waterfall arrangement to provide the best separation effect. Therefore, the cleaning effect can be enhanced by fulfilling this sieving setup. Digging angle is the key factor that mostly influences the cleaning effect. Wider digging angle can enhance the cleaning effect, but it increases the resistance as well. In the case where the resistance is too high, it causes damage to the tuber. Therefore, it is necessary to find the optimal parameters, according to the working conditions. In Wei’s research, the digging angle is tested and set between 10º and 20º, which has the lowest damage rate and highest convey rate.
3.2. Structure Optimization
In the current market, according to the working principle of geometry and mechanical strength, the sieving device structure can mainly be classified into three types as follows: lifting chain, sieving screen and roller screen [1]. By changing the structure of the cleaning device, from one type to another, can enhance the cleaning ability. Regarding the lifting chain, it usually consists of two stages of cleaning. Chain’s vibration and impact, with the lifting chain rod, are the main method of the lifting chain to separate the soil from the tuber [56,57,58,59,60]. When combined with the vibrator, the lifting chain will produce a wider vibration amplitude, which can enhance the cleaning effect [61]. The relative parameters of the lifting chain, as mentioned above, need to be confirmed to find the best cleaning effect. The motion of the soil mixture drop, from the first separation device to the second separation device, follows an oblique curve [62,63]. The throwing process of the soil mixture and the impact with the lifting chain rod are the main issue in damaging the tubers. In order to reduce the damage rate, the researchers need to confirm the optimal parameters, as mentioned above. Although lifting chain has great effect of clearing soil and sending the tubers up, it remains the fast abrasion speed and easily damaged components that cause the high failure rate.
The sieving screen can be classified into vibration type and swing type, according to the motion form [1]. The swing type can not only sieve the mixture apart, but also send the mixture in the screen surface to the tail screen. Therefore, it is widely used in the long stem and tuber harvesting [56,64,65,66]. Different screening surfaces can sieve different objects, which is based on the variations in size. Researchers used combined sieving screen to achieve the soil cleaning purpose. When the mixture is sent to the tail screen, the mixture keeps having impact on the sieving surface, which crushes the soil and sieves the soil down to the bottom or gets deposited under the tubers. The motion curve is confirmed as projectile motion [67]. The damage mainly happened in the process, when the mixture showed impact with the sieving surface. Researchers measured the collision pressure of small and medium potato tubers at 120 N and 250 N, respectively, which are of lower value than the damaging pressure threshold [12]. Figure 28 shows the relations between vibrating frequency and the damage rate of potatoes. However, regarding the swing sieve mechanism, the unbalanced inertia force remains a problem, which still needs to improve in the future.
The roller screen is widely used in agricultural harvesting and is especially suitable for seed and grain [68,69,70,71]. Roller screen not only makes use of the impact from screening surface to crushing the soil, but also takes advantage of the gravity to realize centrifugal separation which enhances the cleaning effect [11]. Then, the crushed soil sieves out from the roller screen. Moreover, the roller screen can set in the back of the whole mechanism, as the re-separation mechanism, so as to improve the cleaning effect. Researchers use the roller screen to re-separate the soil, improving the result by 4.38 percentage points [71]. However, the roller screen needs to work in the low moisture content and low viscosity soil condition, while its complex structure increases the difficulty of manufacturing and it still lacks applicability in the tuber harvester field.
4. Discussion and Conclusions
This paper presented a comprehensive overview of the mechanical harvester used in agricultural root crops producing processes, from the first separation stage which is mainly to plow and loosen the soil by digging or extracting, to the second separation stage which is cleaning the root further by sieving. The main discussion and conclusions are drawn as follows:
(1) Mechanical harvester of root crops is one of the most important technological processes. The most difficult technological process during the root harvesting is the process of soil separation, which consists in the destruction of soil clods, and further their separation on the sieve screens. And the factors including the digging shovel shape, working conditions, vibration and screening way, dramatically affect the ability of harvesters and determine their efficiency.
(2) Soil cutting and crushing are necessary operations to happen at the digging process of the first separation stage, which always require a higher draught and lead a higher damage rate. Many attentions had been paid for resolving these problems. The methods such as using vibrating soil-cutting tools, optimizing soil-engaging implements by bionic method, changing the working parameters or mechanism, had been proved to be effective for these problems.
(3) Frequency, amplitude and vibratory mechanism have an important effect on the root damage during the second separation stage. The unsuitable vibratory parameters are the main reasons to cause the black spot and shatter bruise defects of root. Setting an appropriate frequency and amplitude, selecting an applicable vibratory mechanism, are necessary for the root harvesting.
(4) Future studies are suggested to focus on the development of the soil break-up when the digging shovel cutting soil, the insight into the interaction between soil and roots by different external compression loads, and more importantly, verifying the high-efficiency and low-damage performances of mechanical harvester in long-term operation.
Author Contributions
Conceptualization, Z.G. and Y.Y.; methodology, Z.G. and Y.Y.; validation, Z.G. and Y.Y.; formal analysis, Y.Y.; investigation, Y.Y.; resources, Z.G. and Y.Y.; data curation, Z.G.; writing—original draft preparation,Z.G. and Y.Y.; writing—review and editing, Z.G. and Y.Y.; visualization,Z.G.; supervision,Y.Y., Y.H. and R.Z.; project administration,Y.Y.; funding acquisition, Y.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the China Postdoctoral Science Foundation (Grant No. 2020M683577), the Natural Science Basic Research Project of Shaanxi Province (Grant No. 2023-JC-QN-0219) and the Discipline construction fund project of Northwest A&F University.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available in this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yu, Q.X.; Cao, G.Q.; Chen, B.; Gong, Y.; Chen, X.B. Application and research status of harvesting mechanization of Rhizome Chinese herbal medicine. Journal of Chinese Agricultural Mechanization. 2022, 43, 15–21. [Google Scholar]
- Yang, W.; Yang, J.; Li, Z.J. Numerical simulation of digging shovel operation of cassava root. Appl. Mech. Mater. 2012, 215–216, 1126–1130. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, F.W.; Yang, X.P. Research on mining characteristics of triangular plane shovel with different dip angles for astragalus harvester. J. Northeast Agric.Univ. 2021, 52, 50–59. [Google Scholar]
- Yang, R.B.; Shang, S.Q. Design and test of multifunctional curved-surface shovel in digging harvest. Trans. Chin. Soc. Agric. Eng. 2012, 28, 47–52. [Google Scholar]
- Fan, Y. Research on potato digging mechanism based on discrete element method and design of bionic shovel. Shenyang Agricultural University. 2020. [Google Scholar]
- Li, J.W.; Jiang, X.H.; Ma, Y.H.; Tong, J.; Hu, B. Bionic Design of a Potato Digging Shovel with Drag Reduction Based on the Discrete Element Method (DEM) in Clay Soil. Appl. Sci-Basel. 2020, 10, 7096. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Li, Y.; Tong, J.; Carr, S. Convergent evolution inspired serrated structure for improving efficiency of soil imprinting and its mechanism investigation. Int. J. Agr. Biol. Eng. 2019, 12, 16–26. [Google Scholar] [CrossRef]
- Voiku, I. Development of the optimal design of manual garden fork with the ability to quickly clean the working surface. Proceedings of the 13th International Scientific and Practical Conference. 2021, 3, 378–381. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Xue, H.T.; Wang, Y.C.; Xie, K.T.; Deng, Y.X. Design and Experiment of Panax notoginseng Bionic Excavating Shovel Based on EDEM. Trans. Chin. Soc. Agric. Eng. 2022, 53, 100–111. [Google Scholar]
- Yao, S. Research on the design of combined harvesting tec hnology and device of pulling white radish. Jiangsu university. 2022. [Google Scholar]
- Wei, M. The Design and Simulation Analysis of Key Components of the Roller Potato Harvester. Hubei University of Technology. 2019. [Google Scholar]
- Yong, Y.S.; Hua, L.Y.; Jing, X.J. Parametric Modeling and Moving Simulation of Vibrating Screen and Tubers on Potato Harvester. Appl. Mech. Mater. 2012, 1935, 627–632. [Google Scholar]
- Zhang, Z.P. Design and Experimental Research on Key Components of Isatis Root Harvester. Heilongjiang Bayi Agricultural University. 2021. [Google Scholar]
- Liu, S.H.; Liao, Y.L.; Wang, T.; Zhang, Y. Cassava digging shovels' multi-objective decision-making method and its application in bionic design. Cims. 2015, 21, 67–75. [Google Scholar]
- Ge, Y.Y.; Wang, J.F.; Ma, L.X.; Shao, D.W. The digging shovel of corn stubble shop machine design and the performance of drag reduction test. Appl. Mech. Mater. 2013, 345, 81–84. [Google Scholar] [CrossRef]
- Guo, Z.J.; Zhou, Z.L.; Zhang, Y.; Li, Z.L. Bionic optimization research of soil cultivating component design. Sci. China, Ser. E. 2009, 52, 955–965. [Google Scholar] [CrossRef]
- Medvedev, V.V. Soil penetration resistance and penetrographs in studies of tillage technologies. Eurasian Soil Sci+. 2009, 42, 299–309. [Google Scholar] [CrossRef]
- Wang, J.F.; Ma, L.X.; Shao, D.W.; Ge, Y.Y.; Liu, X.Z. Design and experiment of maize root stubble harvester. Trans. Chin. Soc. Agric. Eng. 2012, 43, 68–72. [Google Scholar]
- Liu, Q. Design and Research on Key Components of Excavating Radish Combine Harvester. Shandong Agricultural University. 2019. [Google Scholar]
- Zhang, Y.H.; Ning, W.Y.; Zhao, Y.Q. Design and virtual test of vibration-type digging shovel. Lecture Notes in Electrical Engineering. 2013, 216, 855–864. [Google Scholar]
- Lu, J.Q.; Tian, Z.G.; Wu, J.E.; Yang, Y.; Shang, Q.Q.; Wang, Y.B.; Liu, Z.X. Design and experiment on 4U1Z vibrating potato digger. Trans. Chin. Soc. Agric. Eng. 2015, 31, 39–47. [Google Scholar]
- Xing, L.R.; Li, R.X.; Wang, T.X.; Zhang, J. Design and analysis of split garlic harvester. Trans. Chin. Soc. Agric. Eng. 2012, 43, 137–140. [Google Scholar]
- Wei, Z.C.; Li, H.W.; Sun, C.Z.; Li, X.Q.; Liu, W.Z.; Su, G.L.; Wang, F.M. Improvement of potato harvester with two segment of vibration and wave separation. Trans. Chin. Soc. Agric. Eng. 2018, 34, 42–52. [Google Scholar]
- Li, L.; Chen, K.; Hao, W.J. Design for the Vibration Digging and Separating-sytle Potato Excavator. J. Shandong Agric. Univ. (Nat. Sci.) 2021, 52, 1049–1054. [Google Scholar]
- Awuah, E.; Zhou, J.; Liang, Z.; Aikins, K.A.; Gbenontin, B.V.; Mecha, P.; Makange, N.R. Parametric analysis and numerical optimisation of Jerusalem artichoke vibrating digging shovel using discrete element method. Soil. Till. Res. 2022, 2022. 219, 105344. [Google Scholar] [CrossRef]
- Wan, L.P.C.; Li, Y.L.; Huang, J.Q.; Song, J.N.; Dong, X.Q.; Wang, J.C. Driving Torque Characteristics of Oscillating Slat Shovel for Rhizome Crops Harvest Device. Trans. Chin. Soc. Agric. Eng. 2022, 53, 191–200. [Google Scholar]
- Wan, L.P.C.; Li, Y.L.; Zhao, H.; Xu, G.H.; Song, J.N.; Dong, X.Q.; Zhang, C.; Wang, J.C. Gradient throwing characteristics of oscillating slat shovel for rhizome crop harvesters. Trans. Chin. Soc. Agric. Eng. 2021, 24, 9–21. [Google Scholar]
- Sun, Y.P.; Dong, X.Q.; Song, J.N.; Wang, J.C.; Liu, C.L.; Xu, G.H. Self-balancing performance and simulation analysis of multi-group vibrating sholvels of oscillatory subsoiler. Trans. Chin. Soc. Agric. Eng. 2018, 34, 92–99. [Google Scholar]
- Ning, W.Y.; Chen, Y.; Kuang, Y.L.; Zhang, Y.H. The drag reduction mechanism of vibration digging shovel. Adv. Mech. Mater. 2013, 288, 41–47. [Google Scholar] [CrossRef]
- Wang, D.W.; Wang, J.S. Design and Test of Soil Cutting and Digging Device Based on Ultrasonic Vibration. Trans. Chin. Soc. Agric. Eng. 2020, 51, 85–92. [Google Scholar]
- Wang, K.H. Simulation and experiment of vibration drag reduction of digging shovel of decursivum harvester. Anhui Agricultural University. 2022. [Google Scholar]
- Sun, W.; Wu, J.M.; Shi, L.R.; Zhang, H.; Li, T.; Kao, J. Drag reduction performance parameter optimization of vibration digging shovel. Adv. Mech. Mater. 2014, 926–930, 777–780. [Google Scholar] [CrossRef]
- Dong, X.Q.; Song, J.N.; Wang, J.C.; Li, Y.L.; Zhang, J.K. Vibration frequency optimization and movement characteristics analysis of vibration shovel for meadow. Trans. Chin. Soc. Agric. Eng. 2012, 28, 44–49. [Google Scholar]
- Gupta, C.P.; Rajput, D.S. EFFECT OF AMPLITUDE AND FREQUENCY ON SOIL BREAK-UP BY AN OSCILLATING TILLAGE TOOL IN A SOIL BIN EXPERIMENT. Soil. Till. Res. 2021, 25, 329–338. [Google Scholar] [CrossRef]
- Wang, J.S.; Wang, D.W.; Zhao, Z.H. Mechanical properties of soil-engaging components interacted with ultrasonic vibration in agricultural machinery. Trans. Chin. Soc. Agric. Eng. 2021, 23, 35–41. [Google Scholar]
- Yu, J.T.; Ma, Y.H.; Wang, S.; Xu, Z.H.; Liu, X.T.; Wang, H.B.; Qi, H.Y.; Han, L.J.; Zhuang, J. 3D Finite Element Simulation and Experimental Validation of a Mole Rat's Digit Inspired Biomimetic Potato Digging Shovel. Appl. Sci-Basel. 2022, 12, 1761. [Google Scholar] [CrossRef]
- Zuo, B.Q.; Shang, S.Q.; He, X.N.; Zhao, Z.L.; Li, D.J.; Liu, W.; Li, X.; Wang, D.W. RESEARCH AND ANALYSIS OF BIONIC GOLDEN CICADA PEANUT DIGGING SHOVEL. Inmateh- Agric Eng. 2022, 68, 649–658. [Google Scholar] [CrossRef]
- Zuo, B.Q.; Shang, S.Q.; He, X.N.; Gao, Z.H.; Liu, W.; Zhang, C.X.; Wang, D.W. Research and simulation analysis of peanut combined harvester excavating device. Inmateh – Agric. Eng. 2022, 68, 383–394. [Google Scholar] [CrossRef]
- Zhang, Z.J.; Jia, H.L.; Sun, J.Y. Review of application of biomimetics for designing soil-engaging tillage implements in Northeast China. Int. J. Agric. Biol. Eng. 2016, 9, 12–21. [Google Scholar]
- Wu, B.G.; Zhang, R.Z.; Tong, J.; Zhou, D.Y.; Yu, H.Y.; Zhang, Q.; Zhang, J.S.; Xin, Y.L. Bionic Nonsmooth Drag Reduction Mathematical Model Construction and Subsoiling Verification. Appl. Bionics. Biomech. 2021, 2021, 5113453. [Google Scholar] [CrossRef]
- Zhou, D.Y.; Hou, P.F.; Xin, Y.L.; Wu, B.G.; Tong, J.; Yu, H.Y.; Qi, J.T.; Zhang, J.S.; Zhang, Q. Resistance and Consumption Reduction Mechanism of Bionic Vibration and Verification of Field Subsoiling Experiment. Appl. Sci-Basel. 2021, 11, 10480. [Google Scholar] [CrossRef]
- Ma, W.P.; You, Y.; Wang, D.C.; Hu, J.N.; Huan, X.L.; Zhu, L. Design and Experiment of Low-resistance Soil Loosening Shovel for Cutting Roots and Reseeding in Perennial Alfalfa Field. Trans. Chin. Soc. Agric. Eng. 2021, 52, 86–95. [Google Scholar] [CrossRef]
- Li, J.Q.; Kou, B.X.; Liu, G.M.; Fan, W.F.; Liu, L.L. Resistance reduction by bionic coupling of the earthworm lubrication function. Sci. China. Technol. Sc. 2010, 53, 2989–2995. [Google Scholar] [CrossRef]
- Liu, S.H.; Weng, S.J.; Liao, Y.L.; Zhu, D.Y. Structural Bionic Design for Digging Shovel of Cassava Harvester Considering Soil Mechanics. Appl. Bionics. Biomech. 2014, 11, 1–11. [Google Scholar] [CrossRef]
- Development of weed extractor for sugarcane farming. Weef-Gedc. 2018.
- Liao, Y.L.; Sun, Y.P.; Liu, S.H.; Chen, D.P.; Wang, G.P. Development and prototype trial of digging-pulling style cassava harvester. Trans. Chin. Soc. Agric. Eng. 2012, 28, 29–35. [Google Scholar]
- Yang, W.; Cai, G.W.; Yang, J.; Huang, Y.Q. Mechanical and mathematical model analysis of uprooted force on cassava storage root. Trans. Chin. Soc. Agric. Eng. 2011, 27, 95–100. [Google Scholar]
- Yao, S. Optimal Design and Experimental Research on Key Components of Cabbage Harvester. Chinese Academy of Agricultural Sciences. 2020. [Google Scholar]
- Wei, Z.C.; Li, H.W.; Sun, C.Z.; Li, X.Q.; Su, G.L.; Liu, W.Z. Design and Experiment of Potato Combined Harvester Based on Multi-stage Separation Technology. Trans. Chin. Soc. Agric. Eng. 2019, 50, 129–140. [Google Scholar]
- Li, Y.Y.; Hu, Z.C.; Gu, F.W.; Wang, B.; Fan, J.L.; Yang, H.G.; Wu, F. DEM-MBD Coupling Simulation and Analysis of the Working Process of Soil and Tuber Separation of a Potato Combine Harvester. Agronomy-basel 2022, 12, 1734. [Google Scholar] [CrossRef]
- Zhang, H.M.; Zhou, Z.; Qu, Z.; Li, Z.J.; Wang, W.Z. Simulation and Experiment of Sieving Process of Sieving Device for Tiger Nut Harvester. Agriculture-basel. 2022, 12, 1680. [Google Scholar] [CrossRef]
- Wei, Z.C.; Li, H.W.; Su, G.L.; Sun, C.Z.; Liu, W.Z.; Li, X.Q. Development of potato harvester with buffer type potato-impurity separation sieve. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–11. [Google Scholar]
- Zhang, Z.G.; Wang, H.Y.; Li, Y.B.; Yang, X.; Ibrahim, I.; Zhang, Z.D. Design and Experiment of Multi-stage Separation Buffer Potato Harvester. Trans. Chin. Soc. Agric. Eng. 2021, 52, 96–109. [Google Scholar]
- Yu, M.T. DESIGN AND RESEARCH ON KEY COMPONENTS OF POTATO COMBINE HARVESTER. Qingdao University of Science and Technology. 2022.
- Xie, S.S.; Wang, C.G.; Deng, W.G.; Li, X.; Qi, S.H. Separating Mechanism Analysis and Parameter Optimization Experiment of Swing Separation Sieve for Potato and Soil Mixture. Trans. Chin. Soc. Agric. Eng. 2017, 25, 156–164. [Google Scholar]
- Dorokhov, A.; Aksenov, A.; Sibirev, A.; Mosyakov, M.; Sazonov, N.; Godyaeva, M. Evaluation of Comparative Field Studies for Root and Onion Harvester with Variable Angle Conveyor. Agriculture-Basel. 2023, 13, 572. [Google Scholar] [CrossRef]
- Wei, Z.C.; Su, G.L.; Li, X.Q.; Wang, F.M.; Sun, C.Z.; Meng, P.X. Parameter Optimization and Test of Potato Harvester Wavy Sieve Based on EDEM. Trans. Chin. Soc. Agric. Eng. 2020, 51, 109–122. [Google Scholar]
- Lu, J.Q.; Sun, H.; Dui, H.; Peng, M.M.; Yu, J.Y. Design and Experiment on Conveyor Separation Device of Potato Digger under Heavy Soil Condition. Trans. Chin. Soc. Agric. Eng. 2017, 48, 146–155. [Google Scholar]
- Mu, G.Z.; Wang, W.S.; Zhang, T.T.; Hu, L.L.; Zheng, W.X.; Zhang, W.Z. Design and Experiment with a Double-Roller Sweet Potato Vine Harvester. Agriculture-Basel. 2022, 12, 1559. [Google Scholar] [CrossRef]
- Wu, B.; Huang, T.C.; Qiu, X.X.; Zuo, T.L.; Wang, X.S.; Xie, F.P. Design and Experimental Study of Potato-Soil Separation Device for Sticky Soils Condition. Appl. Sci-Basel. 2021, 11, 10959. [Google Scholar] [CrossRef]
- Feng, X.; Chen, L.; Li, M.T.; Xiang, J.H. Design and Test of Potato Soil Separation Device Based on Potato Harvester. Acm Icps. 2022, 135–142. [Google Scholar]
- Lu, J.Q.; Yang, X.H.; Lu, Y.N.; Li, Z.H.; Li, J.C.; Du, C.L. Analysis and Experiment of Potato Damage in Process of Lifting and Separating Potato Excavator. Trans. Chin. Soc. Agric. Eng. 2020, 51, 103–113. [Google Scholar]
- Yang, X.P.; Wei, H.A.; Zhao, W.Y.; Jiang, Y.W.; Dai, L.; Huang, X.P. Design and Experiment of 4U-1600 Set of Pile Type Potato Digger 4U-1600. Trans. Chin. Soc. Agric. Eng. 2020, 51, 83–92. [Google Scholar]
- Yu, Z.Y.; Hu, Z.C.; Cao, M.Z.; Wang, S.Y.; Zhang, P.; Peng, B.L. Design of cleaning device of tangential flow and whole-feed peanut combine harvester. Trans. Chin. Soc. Agric. Eng. 2019, 35, 29–37. [Google Scholar]
- Qu, Z.; Han, M.H.; Lv, Y.L.; Zhou, Z.; Lv, Z.J.; Wang, W.Z.; He, X. Design and Test of a Crawler-Type Tiger-Nut Combine Harvester. Agriculture-Basel. 2023, 13, 277. [Google Scholar] [CrossRef]
- Li, X.P.; Meng, Y.J.; Zhang, J.L.; Geng, L.X.; Ji, J.T. Design and Test of Cleaning Device for Roller Rubbing Cylinder Sieve of Millet. Trans. Chin. Soc. Agric. Eng. 2018, 49, 92–102. [Google Scholar]
- Tao, G.X.; Zhang, Z.H.; Yi, S.J.; Xia, C.L.; Ma, Y.C. Design and Test of Combined Swing Radix isatidi Root-soil Separation Device. Trans. Chin. Soc. Agric. Eng. 2022, 25, 109–119. [Google Scholar]
- Peng, Q.J.; Li, C.S.; Kang, J.M.; Shi, G.K.; Zhang, H. Improved Design and Test on Pneumatic Cylinder Sieve Film Hybrid Separator. Trans. Chin. Soc. Agric. Eng. 2020, 51, 126–135. [Google Scholar]
- Wang, S.S.; Chen, P.; Lu, M.Q.; Geng, L.X.; Ji, J.T.; Yang, F. Design and Experiment of Separation and Cleaning Device for Chinese Cabbage Seeds Harvester. Trans. Chin. Soc. Agric. Eng. 2020, 51, 181–190. [Google Scholar]
- Dorokhov, A.S.; Aksenov, A.G.; Sibirev, A.V.; Sazonov, N.V. Justification of design and technological parameters of the onion harvester bed-shaping roller spiral drum. Inmateh-Agric. Eng. 2020, 60, 107–114. [Google Scholar] [CrossRef]
- Yuan, J.C.; Yang, J.; Wan, X.Y.; Liao, Y.T.; Liao, Q.X. Design and Experiment of Cylinder Sieve Type Re-cleaning Device for Rape Combine Harvester. Trans. Chin. Soc. Agric. Eng. 2022, 53, 99–108. [Google Scholar]
Figure 1.
Typical examples of root crops.
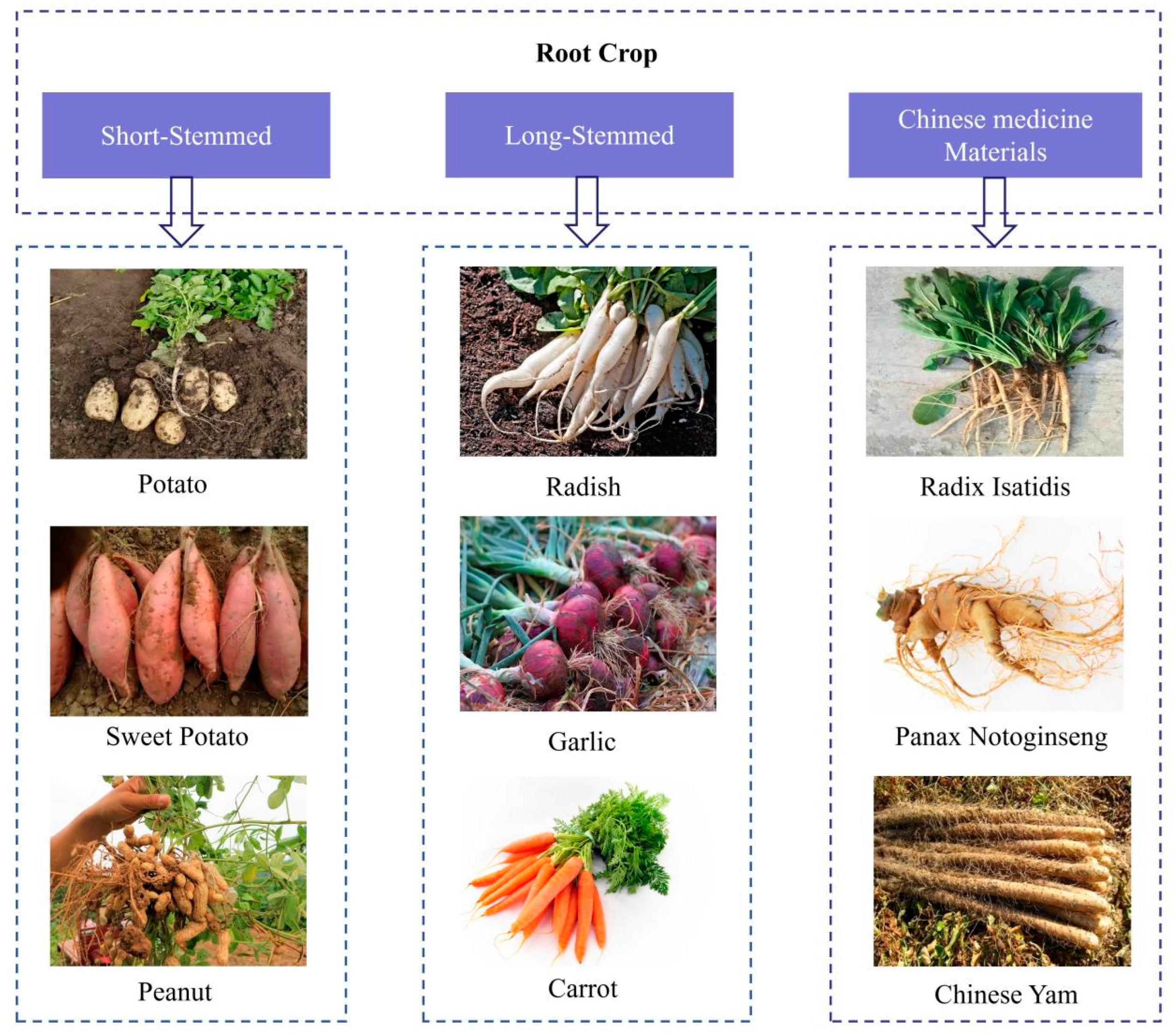
Figure 2.
Typical bionic curved-surface shovel and its digging performance.
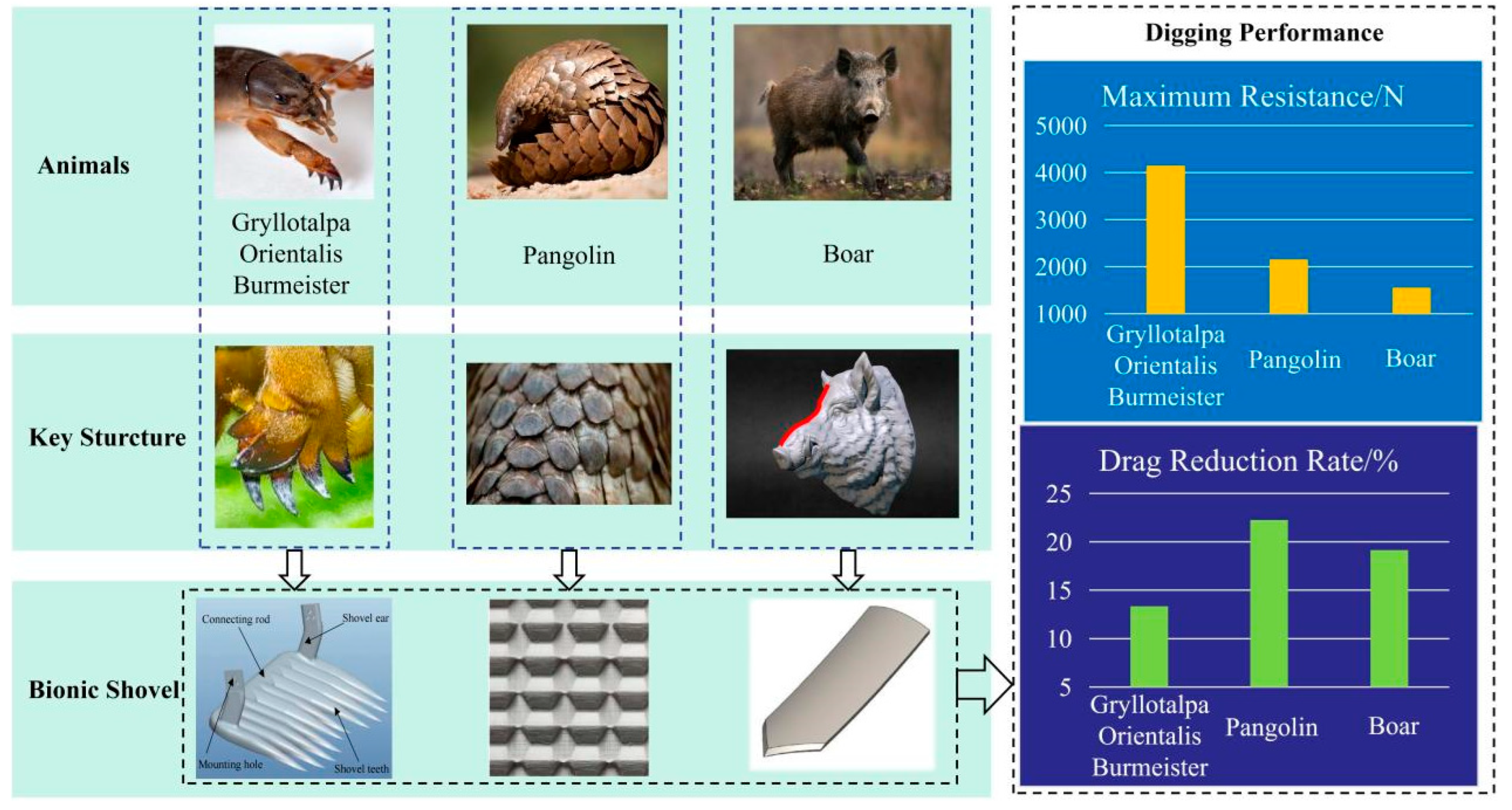
Figure 3.
Gripper and its forward speed digging performance.
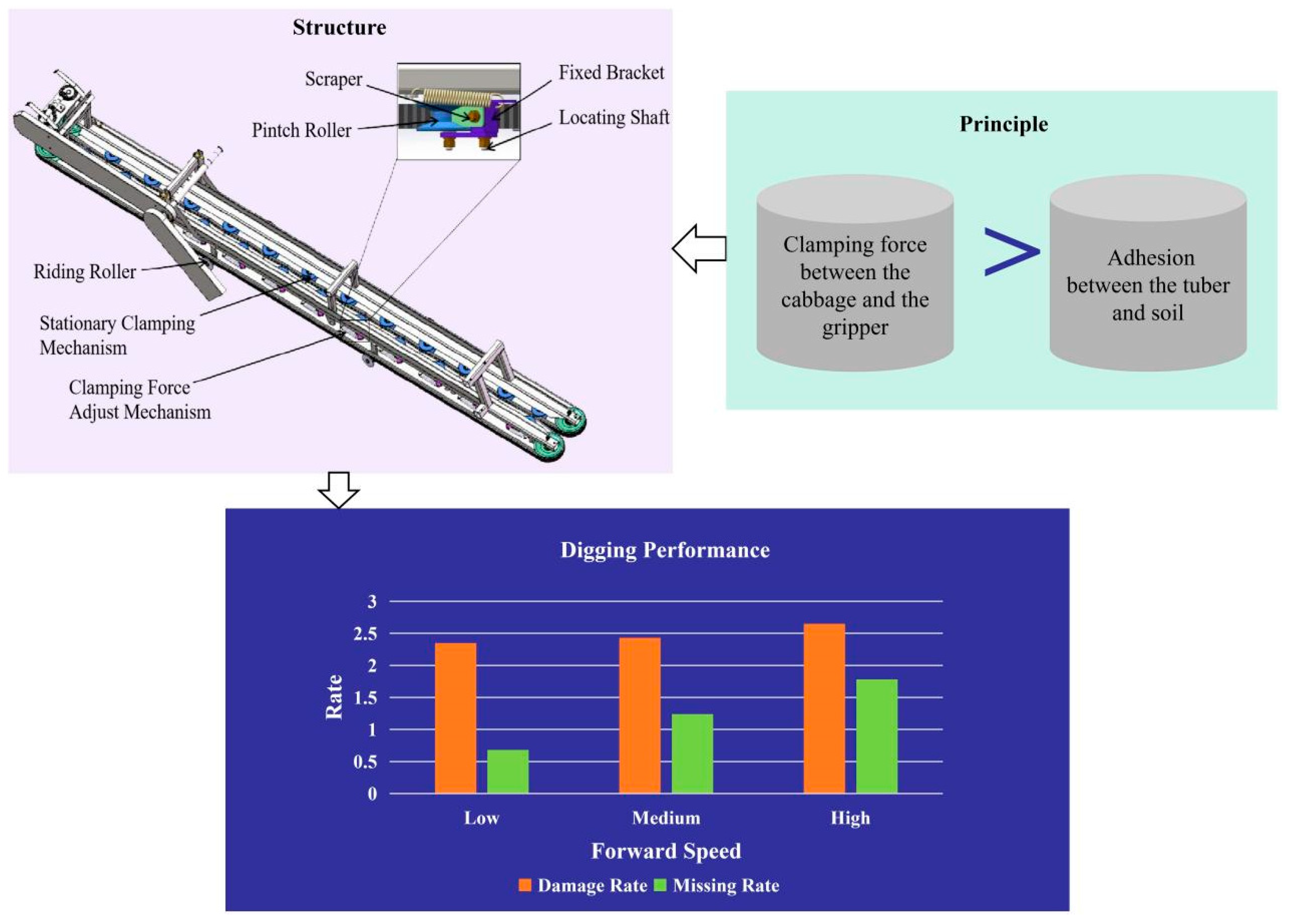
Figure 4.
Main characteristics of lifting rod, sieving screen and roller screen.
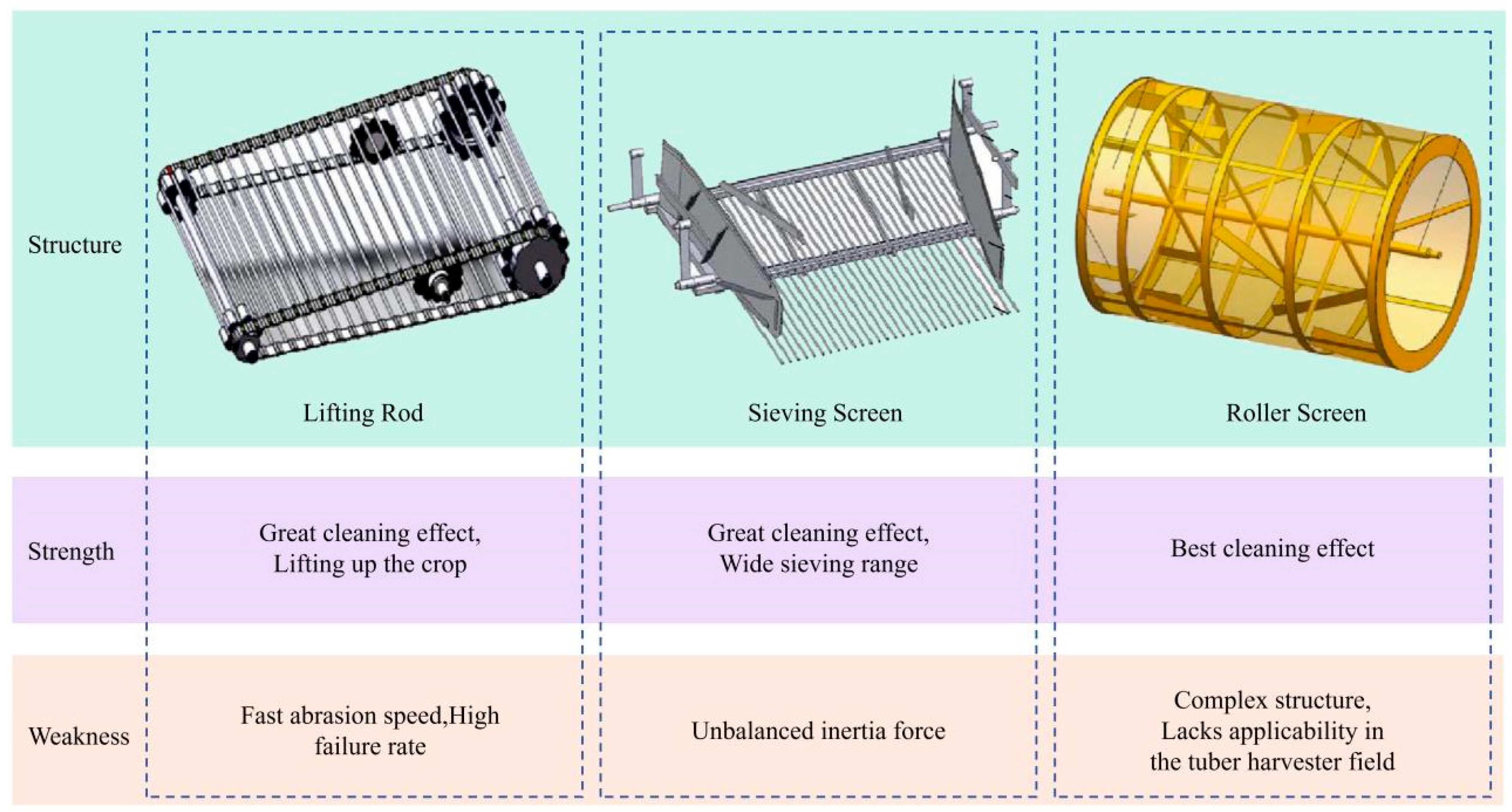
Figure 5.
Cause and classification of the four damage types.
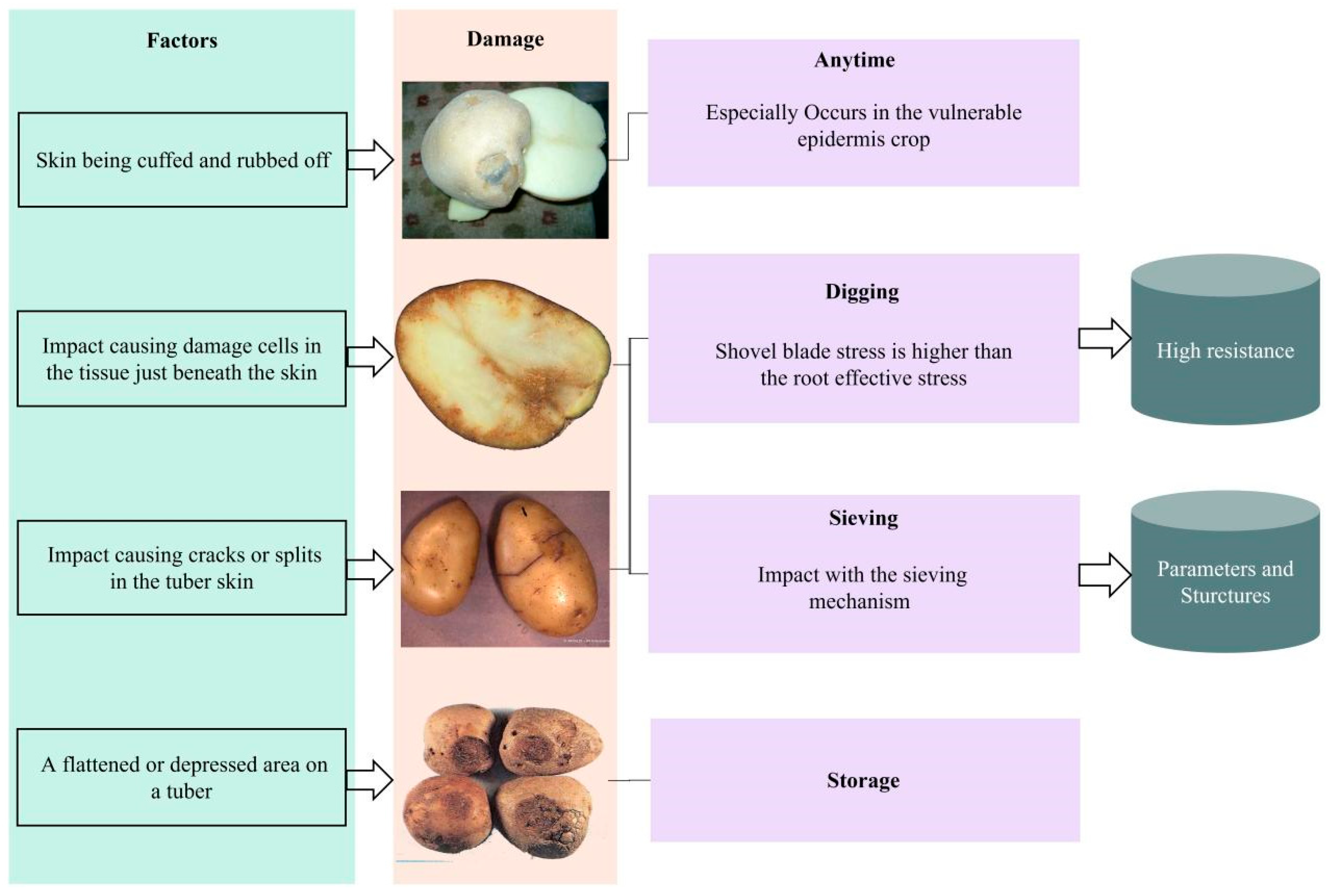
Figure 6.
Main optimal approaches during the two-phase process.
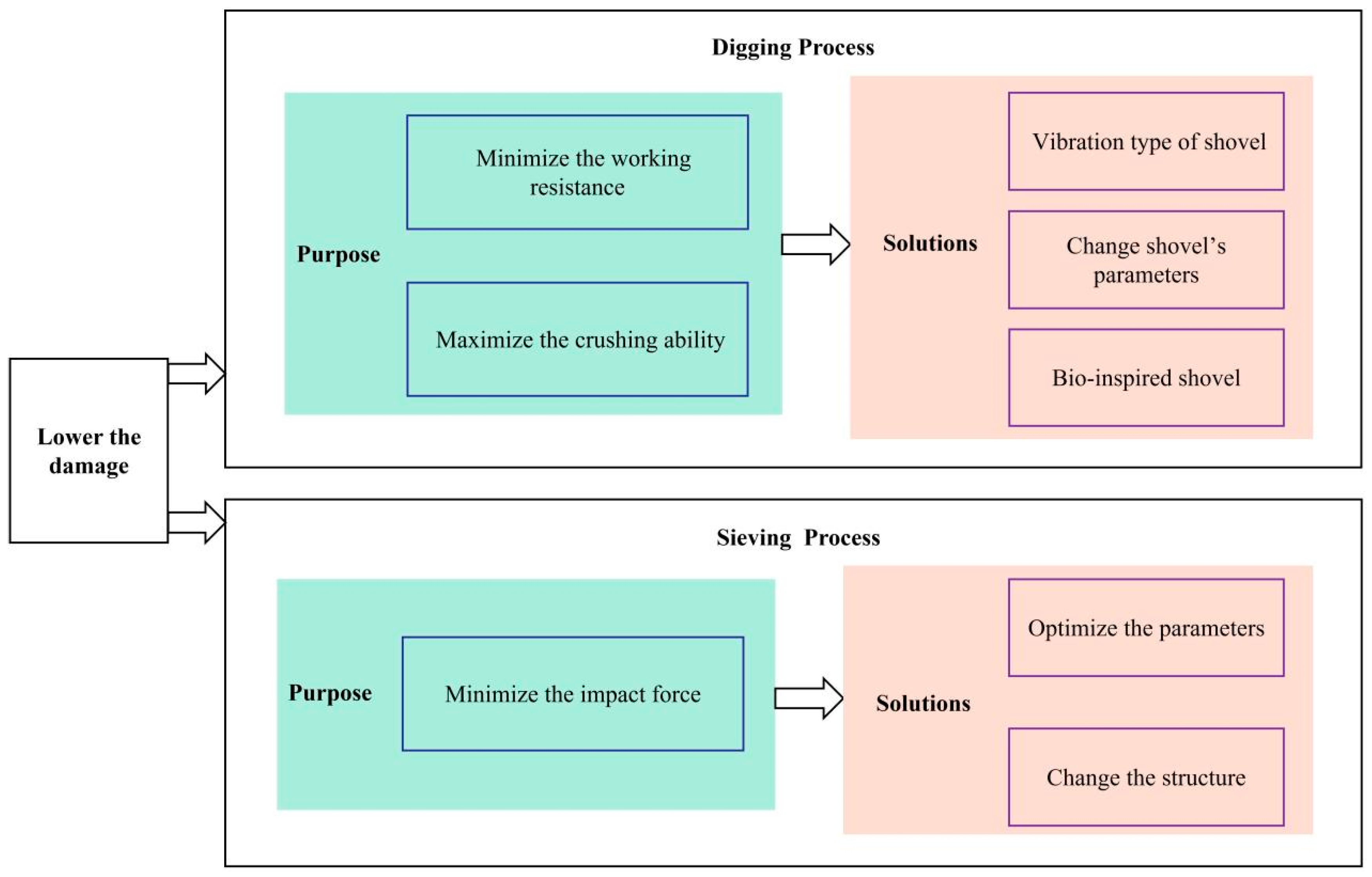
Figure 7.
Schematic of the soil sheared and fractured in the digging process.
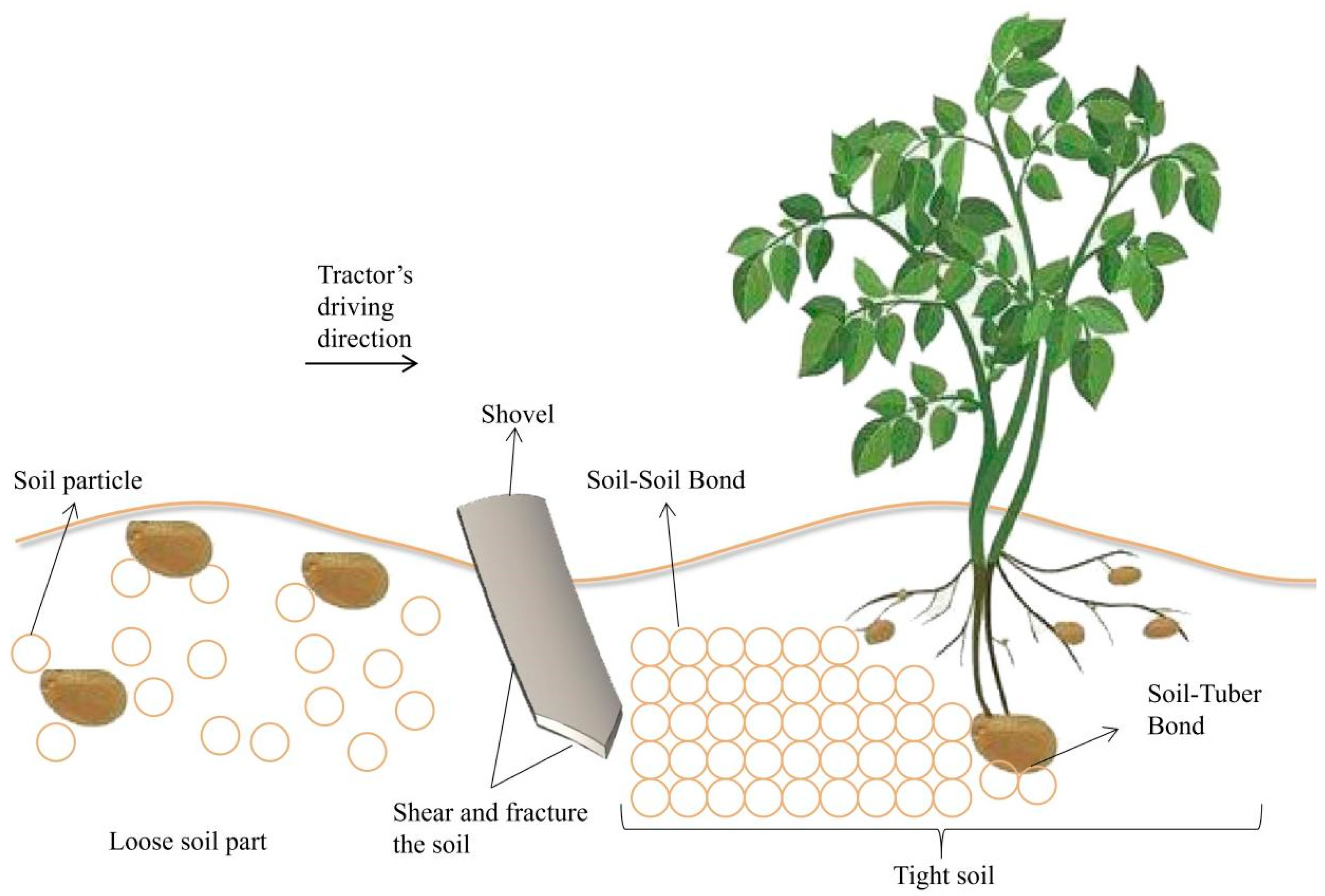
Figure 8.
Results and comparison of the vibrating soil-cutting tools.
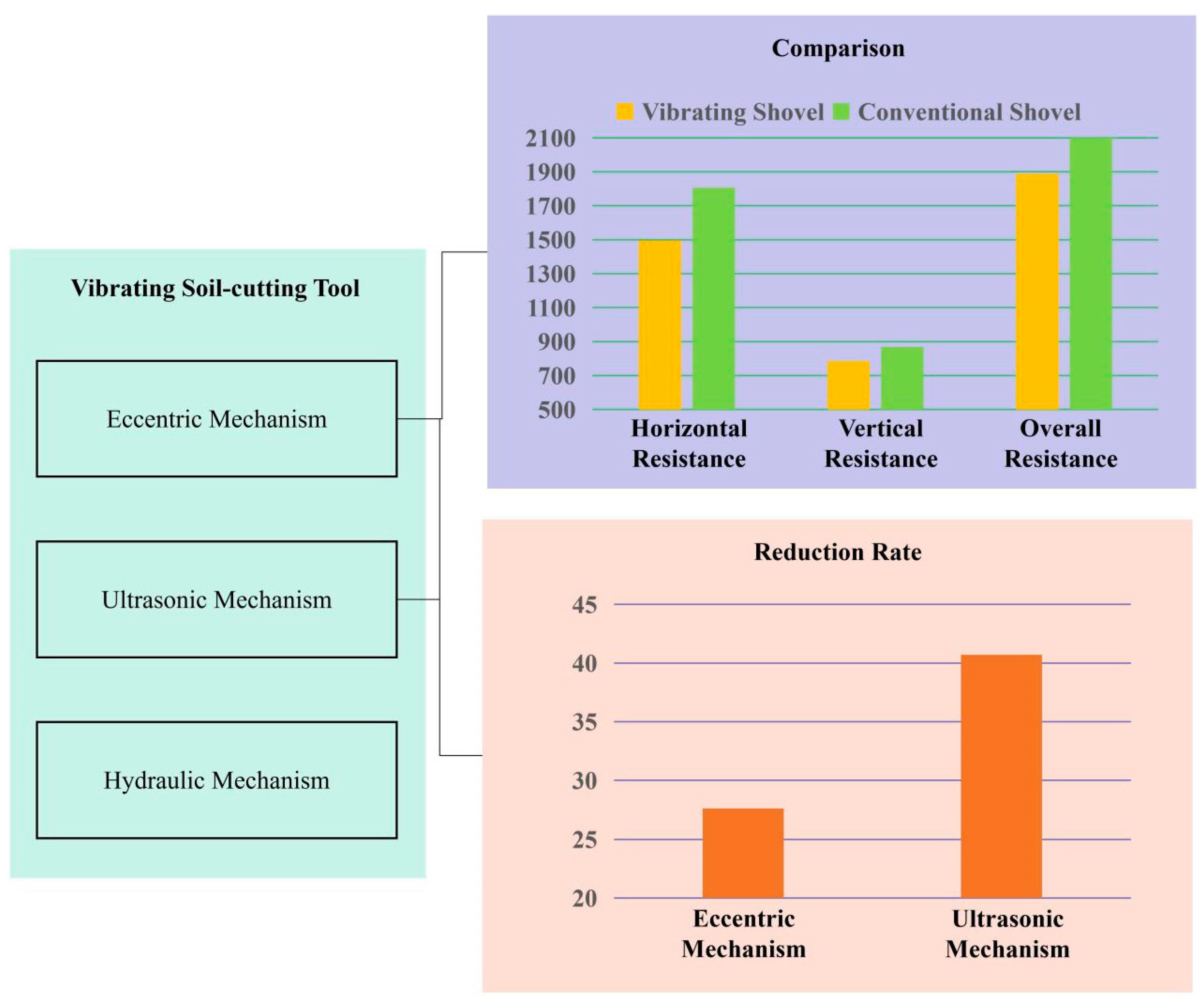
Figure 9.
Schematic of sieving the soil that attached to the tuber.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



