Submitted:
24 May 2023
Posted:
29 May 2023
You are already at the latest version
Abstract
Fires pose a significant threat to human life and property. An autonomous fire detection and fighting robot has the potential to mitigate the challenges associated with firefighting. This paper presents the implementation of an autonomous fire detection and fighting robot equipped with sensors, algorithms, and actuators to detect, locate, and suppress fires autonomously. The robot's mechanical and electrical components were designed, prototyped, and tested in a controlled environment to evaluate its ability to navigate through obstacles, detect fires, and suppress them autonomously. The results show that the robot effectively detects and suppresses fires, making it a promising solution for firefighting applications. The study contributes to the development of autonomous robots for firefighting, enhancing the safety of firefighters and the effectiveness of firefighting operations.
Keywords:
Autonomous Robot
; Firefighting Robot
; Intelligent Robot
; Fire Detection
1. Introduction
The implementation of autonomous robots in various fields has been growing at a rapid pace in recent years [1]. One of the important areas where autonomous robots can play a vital role is in fire detection and fighting [2,3]. The traditional fire detection and fighting systems have several limitations, including the need for human intervention and the inability to operate in hazardous environments [4,5]. The use of autonomous robots can overcome these limitations and provide an efficient and effective solution [6,7]. Fires have been a long-standing threat to the safety of human lives and property [8]. In the event of a fire outbreak, the primary objective is to evacuate individuals and prevent the spread of fire [9]. However, it can be challenging to contain a fire outbreak in areas where the fire is inaccessible or dangerous for human intervention [3]. Hence, the development of an autonomous fire detection and fighting robot can help to mitigate these challenges [1,6,10]. Autonomous robots have become increasingly popular in various industries, including healthcare [11,12], agriculture [13,14,15], and transportation [14]. Studies have indicated that the use of mobile robots in a dangerous environment can perform tasks that require, repetitive, precision or accuracy, speed, and consistency that surpass human capability [1,6,10,12]. The same applies to the application of robots in the field of firefighting [4,16,17]. A robot designed for firefighting maneuvers through hazardous areas and performing tasks such as detecting, monitoring, and suppressing fires, without exposing human firefighters to the associated risks [18,19]. [1,6,7] reviewed some research on the development of firefighting robots, and the various prototypes designed and tested. Some of the most common types of firefighting robots include humanoid robots [20], wheeled robots [16], tracked robots [21,22], and flying robots [23,24]. These robots are equipped with sensors [25,26], cameras [12,27], and thermal imaging technology [2] to detect and locate fires [28,29]. Mobile robots also come with extinguishing mechanisms such as water cannons or foam dispensers to suppress fire [25].
However, most of these robots are remotely operated and require human intervention, which exposes firefighters to the risks associated with firefighting [30]. Autonomous robots eliminate the need for human intervention, making them ideal for situations that pose significant risks to human life [9]. This research presents the implementation of an autonomous fire detection and fighting robot. The robot is equipped with various sensors, such as infrared and temperature sensors [29,31], to detect the presence of fire. The robot also has a water spraying system that can be activated to extinguish the fire. The robot is capable of navigating through the environment autonomously using a combination of sensors and algorithms. The implementation of the autonomous fire detection and fighting robot has several advantages [32]. First, it can operate in hazardous environments where it may not be safe for humans to enter. Second, it can detect and respond to fires quickly, reducing the risk of damage to property and harm to human life [33,34]. Third, it can operate continuously without the need for breaks or rest, providing a reliable and efficient solution [26,35]. Fires outbreaks are a major cause of massive loss of lives and properties around the world [36]. A report by [37] estimated the worth of properties destroyed in 2019 by fires worldwide [38]. Firefighters risk their lives daily, relentlessly containing fire disasters, but they are hugely limited even with fire protective gear and other means of withstanding certain levels of fire [33,39,40]. This demonstrates that relying solely on human efforts to extinguish flames is ineffective because it jeopardizes firefighters’ lives [41]. According to [32] the United States Fire Administration, in the United States, documented the death of hundred and forty-one (141) firemen in the line of service in the year 2021 alone. Risking one life to save another is not ideal, robots can be built to take major risks in dire situations when combating fires, to minimize injuries to firefighters and general loss of lives [36].
2. Fire Detection Methods
[29] proposed a device to measure the temperature difference between two walls. The developed device is tested on both the inside and outside surfaces of the walls. The temperature difference between the wall surfaces is appropriate for measuring fire stages [42]. [20,43] used experiments and simulations to test three different cables for fire detection and localization. In the event of a fire, some coaxial cable parameters such as resistance, capacitance, impedance, amplification, and attenuation change with temperature. The authors tested a coaxial cable up to 100 meters in length. Wang et al. [44] proposed a model of near-field and far-field-based fire localization that utilized a temperature sensor array to determine fire stages. The proposed model is appropriate for the best fire sensor placement. However, the proposed model is unsuitable for measuring fire stages. [45] proposed an acoustic technology-based fire measurement as well as a fiber optic Distributed Temperature Sensing (DTS)-based fire detection system for industrial conveyor belt fires. The surrounding temperature was obtained by the ratio of anti-stokes and stokes Raman lines. These lines are obtained by the backscattered spectrum on passing the light pulses through an optical fiber as modeled by [46]. [47] used spatiotemporal features for fire detection using IR cameras and separated flame regions by image thresho˚˚lding using histograms. The authors used YCbCr color space. IR method is suitable for fires due to alcohol and hydrogen which have low radiance.
Humanoid robot research is being actively pursued to reduce firefighter injuries and deaths while also increasing productivity, safety, efficiency, and task quality [16]. Tele-robots, Telepresence robots, Mobile robots, Autonomous robots, and Android robots are some of the different types of robots. Telepresence robots are similar to telerobotics, with the main difference being that they provide feedback via video, sound, and other data [48,49]. Hence, telepresence robots are widely used in many fields requiring monitoring capabilities, such as in child nursery and education, and in improving older adults’ social and daily activities [48,49]. The mobile robot is designed to navigate and carry out tasks with the intervention of human beings. Meanwhile, autonomous robots can perform the task independently and receive power from the environment, as opposed to android robots which are built to mimic humans [50].
In early fire detection systems, optical flame detectors have been utilized for many years. The detection of smoke or heat is not necessary for an optical flame detector, which is only 0.01mm2 in size yet can detect fire at a distance of 65 meters. The detector can detect the flame fast because of the speed of light. Because of these advantages, optical flame detectors are the preferred choice for the detection and inspection of fires both indoors and outdoors [51]. [52] classifies (optical flame detectors) into several levels with different kinds of optical flame detectors employed to detect the various spectral bands created by the flames, optical sensors that function in certain spectral regions and record penetrating photons of a certain spectrum are widely utilized. According to [53] some flames’ UV (ultraviolet) spectral signature in the region of 100 to 400 nm has a pattern that can be clearly distinguished from background radiation. These Ultraviolet detectors can detect flames quickly due to the high intensity of UV radiation generated by burning (3-4 milliseconds). However, [54] noted that the detectable Ultraviolet radiation may interact with one or more environmental factors such as fog, space, and vapor as well as random sources of Ultraviolet radiation, such as arc welding, lights, solar radiation, and X-rays. This might lead to false alarms in outdoor applications. This is the main reason for the extensive usage of UV detectors in indoor environments [55].
The spectral pattern released by flame temperature and the generation of fire-hot gases may be promptly identified using infrared (IR) sensors. IR radiation isn’t just coming from the flames of a fire. The infrared radiation emitted by ovens, halogen lights, and furnaces has wavelengths that are very close to those of flame. This problem may be solved using a variety of parameter studies and mathematical methodologies [56]. The most often used flicker analysis and IR threshold in the narrow band signal filters are those operating between the range of 4.1 and 4.6 m in wavelength. The majority of single infrared detectors make use of pyroelectric sensors with an optical filter of 4.4 m and an electronic bandpass filter of 1-10 Hz. The majority of these devices are put to use in domestic settings [57]. Ultraviolet-infrared flame detectors (dual sensor types) as stated by [43], that the sensor provides excellent fire detector, utilizing quick activation by arc welding, solar spikes, and X-rays. It consisted of an IR sensing channel introduced to the Ultraviolet detector to reduce false alarms. The channel works at wavelengths between 2.7 and 4.16μm. Infra-red flame detection/dual infrared flame detector uses two small spectral bands in the IR region that is near to decrease false alarms as stated by [42,58]. [42] noted that a hot CO2 fire product ignites hydrocarbon flames, it releases energy in the near infrared region (0.9 to 3.0m), resulting in dual infrared detectors sensitive within the range of (4.3-4.5m). The two narrow bands are often used in common dual IR flame detectors of 0.9 and 4.3m, or a combination of considerably short wavelengths of 0.8-1.1m and longer wavelengths of 14-25m channels. Some IR detectors have a channel in the 4.7-16m Infrared band for background [42].
A digital image processor using a set of Convolutional Neural Network algorithms for its processing was embedded on the backend of an image processing system to detect fire in the developed fire detection system in [59,60] the original images were live feed from a (closed circuit television) CCTV fire detection system consists of three infrared (IR) flame detectors and a video recorder that captures images in color. [60] uses an Internet Protocol (IP) camera to monitor the focus area.
3. Methods
The firefighting robot has 3 sensors (flame sensors), one on the left, one on the right, and one in front. The sensor detects fire on these three sides. A pump is attached to a servo motor which the controller makes to turn to the direction/point of fire. The motor driver connects to two DC motors (one on the left and one on the right). The controller sends a signal to the motor driver to drive the DC motor in the direction of fire as detected by the sensor. The controller then sends the signal to the pump to put out the fire. Some components of the robot included the Servo Motor (SG90), Arduino Uno Microcontroller, ATMEGA328P Microcontroller, Fire sensors, Mini DC submergible pump, Connecting wires, Boost converter Module, and DC Motors. A working schematic is shown in Figure 1.
3.1. Implementation of the Designed Schematic
The implementation of this research involved the development of the AFFMP, interfacing of hardware such as the Communication interfaces Master/Slave SPI Serial Interface (17,18,19 PINS), the timer module, the internal and external oscillators motor driver circuitry, LDR sensors circuitry, Flame/fire Sensors; and the developed algorithm for the microcontroller to provide artificial intelligence to the Mobile Platform itself. The priority of this project is the fire detection capabilities and its accuracy for flame detection through the developed algorithm, preferably at the minimum level of error possible.
3.2. Mechanical Design Structure
The primary framework has two wheels on the rear side and two wheels on the front side to achieve the desired movement and speed. The wheels can stabilize the robot as well as rotate 360 degrees. To protect the electronic circuit, the body of the autonomous vehicular robot is fashioned of an acrylic plate. The acrylic sheet is heat resistant up to 200. This allows you to utilize and operate with (cut and drill). The acrylic chassis’ body features holes that facilitate the installation of several types of sensors and other mechanical components. The ultrasonic sensor and flame sensor were mounted in front of the robot to prevent colliding with objects and to detect fire.
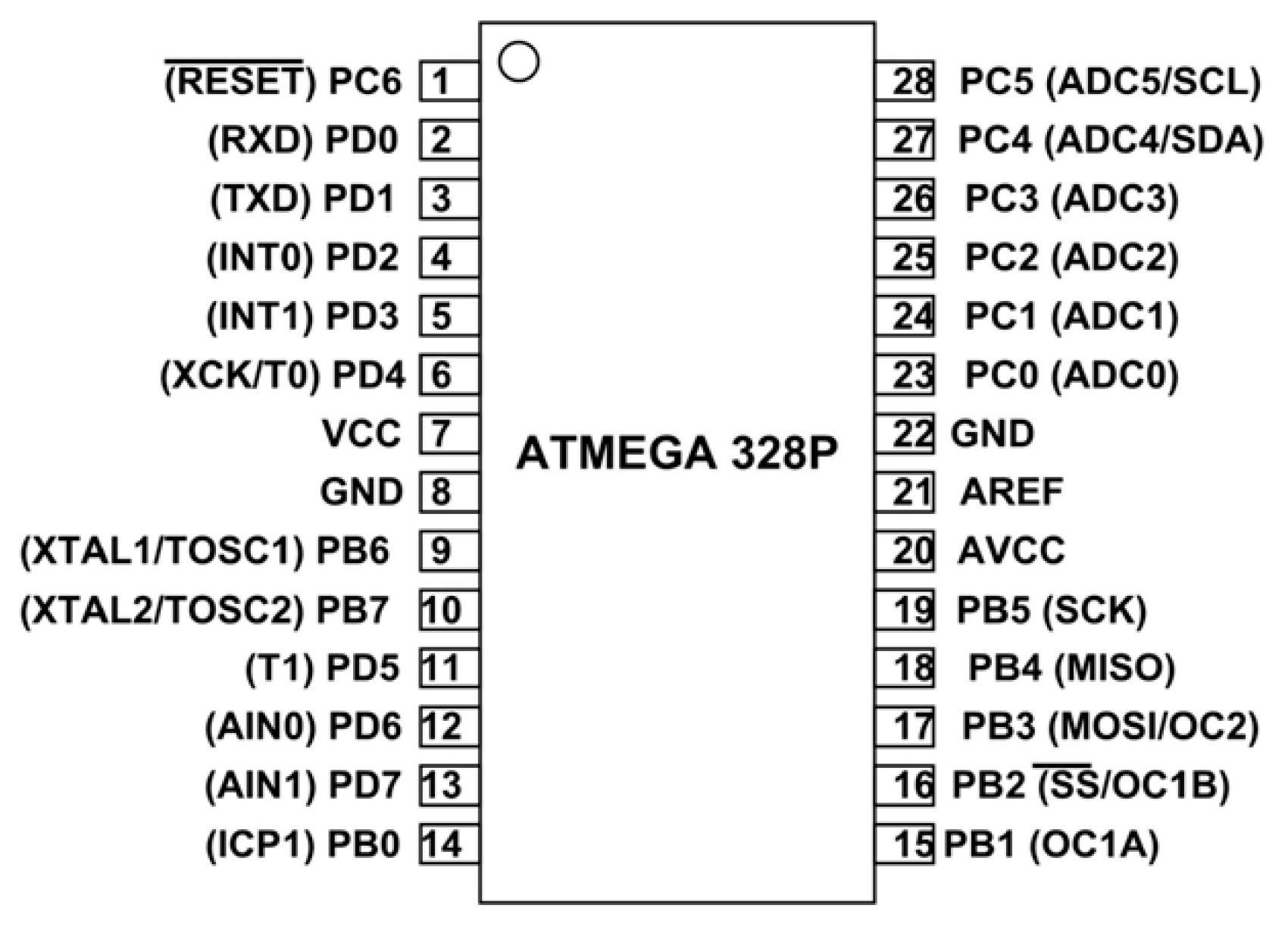
3.3. ATMEGA328P Microcontroller
The ATMEGA328P Microchip was used to complete the control sequence, the microchip was selected based on its low-cost implications, and the high-performance controller. It uses AVR RISC (Alf-Egil Bogen Vegard Wollan Reduced Instruction Set Computer) with an architecture-based 8-bit microcontroller. Figure 3 shows the pin diagram of the ATMEGA328P with a 28-pin chip. Most of the chip’s pins have divergent functions.
Figure 4.
ATMEGA328P Microcontroller.
3.4. Fire sensors
To detect gas fires and carbon-based fuels, the used single IR detectors employ high-tech pyroelectric sensors with a 4.4 micron optical and electronic bandpass filter. Emissions are also detected by the gadget. They are so successful because they discriminate between flame spectral fingerprints and other infrared sources using various mathematical approaches and parameter analyses.
The infrared spectral band is where infrared flame sensors operate. When an explosion happens, some heated gasses generate patterns in the infrared spectrum that may be analyzed using a thermal imaging camera. The UV/IR flame detector combines ultraviolet (UV) and infrared (IR) sensors into a single device. UV sensors detect UV radiation released by combustible fuels such as hydrocarbons, sulfur, hydrazine, and ammonia. The hydrocarbon-fueled flames, the predominant radiant emission band is between 4.3 and 4.4 microns, which is an infrared emission that IR sensors can easily detect. The energy generated by the combustion of at a resonance frequency of 4.3 microns is what allows the IR detector to detect the emission. The robot was developed using three different fire detection sensors one at the front, one right sensor, and one left sensor as shown in Figure 5. This was done to improve the efficiency of the robot by being able to detect the fires from more angles.
3.5. Mini DC submersible Pump
Submersible pumps are designed to be completely immersed in water. Positive displacement pumps are positioned inside the water reservoir that has to be pumped out, as a result, they’re often used for flood drainage, sewage pumping, pond emptying, and even as pond filters. The working principle is based on a small hydraulic pump motor is a rotational boost converter that uses a motor as well as an impeller to pump water. The impeller revolves at a breakneck speed while pushing water. Water is fed into the impeller’s eye, or center, by the curved blades, which then flow along the outer half of the blades. Due to the quick movement of the impeller, the centrifugal force compresses the water against the outer section of the blade. The pressure then forces the water to jet forward at a high-speed way out of the impeller. This resultant speed creates pressure on the output side of the pump, forcing the water through the pipe.
A rotor with coils surrounding it sits in the center of the motor. The magnets that surround those coils provide a constant magnetic field that flows through the rotor. The blade was then driven by the magnetic attraction, allowing it to revolve around 180. As the rotor revolves, the direction of the energy in the coils flips, pushing the rotor again so that it spins the rest of the way around. Through multiple pushes, the rotor continues to spin and drive the impeller to power the pump. The submersible pump was installed in the tank and is attached to the hose that pumps out water to put out flames. When the flame sensors detect flames, they give the signal to the Arduino board, which in turn sends out a signal to the DC motors forcing them to move toward the direction of the fire. That is when the signal is issued to the pump to pump out water to put out the fire via the hose.
3.6. Boost converter module
The boost converter (usually referred to as a step-up converter) is a DC-to-DC converter circuit that was used to create a direct current input voltage and a direct current output voltage that is much larger than the input operating voltage. Its operations are given by the equation below;
where; P = Power (watts), I = current (ohms), V = Voltage (volts)
P = I × V,
The configuration ensures that the converter’s output voltage raises the input voltage, and the current in the output is reduced proportionally, as a result, the output power is usually always equal to or less than the input power. Thus, the boost converter was used to raise the output voltage by lowering the current, this was performed by storing energy in an inductor and since the energy in an inductor cannot change quickly thus, it prompts storing energy in its magnetic field. The circuitry of the boost converter module is given in Figure 6.
The robot’s system and circuitry design was done using the Proteus software and simulated before implementing the hardware components for soldering as shown in Figure 7. This proved that we had a working design for the robot and allowed us to successfully move on to the next objective of building a working prototype. Using the simulation results as a reference, the components represented by the software were all assembled appropriately. Necessary software and algorithm were installed in the robot, and it was programmed to function as intended. Then the robot was evaluated to establish its actual working parameters.
4. Results
The research was implemented and one of its deliverables was a prototype development of the firefighting robot with the capability to intelligently avoid and navigate around obstacles, another distinct feature of the robot was the capability to determine the magnitude and size of fire detected from three different dimensions. The fire detection and the fighting robot were integrated to produce the intended results successfully.
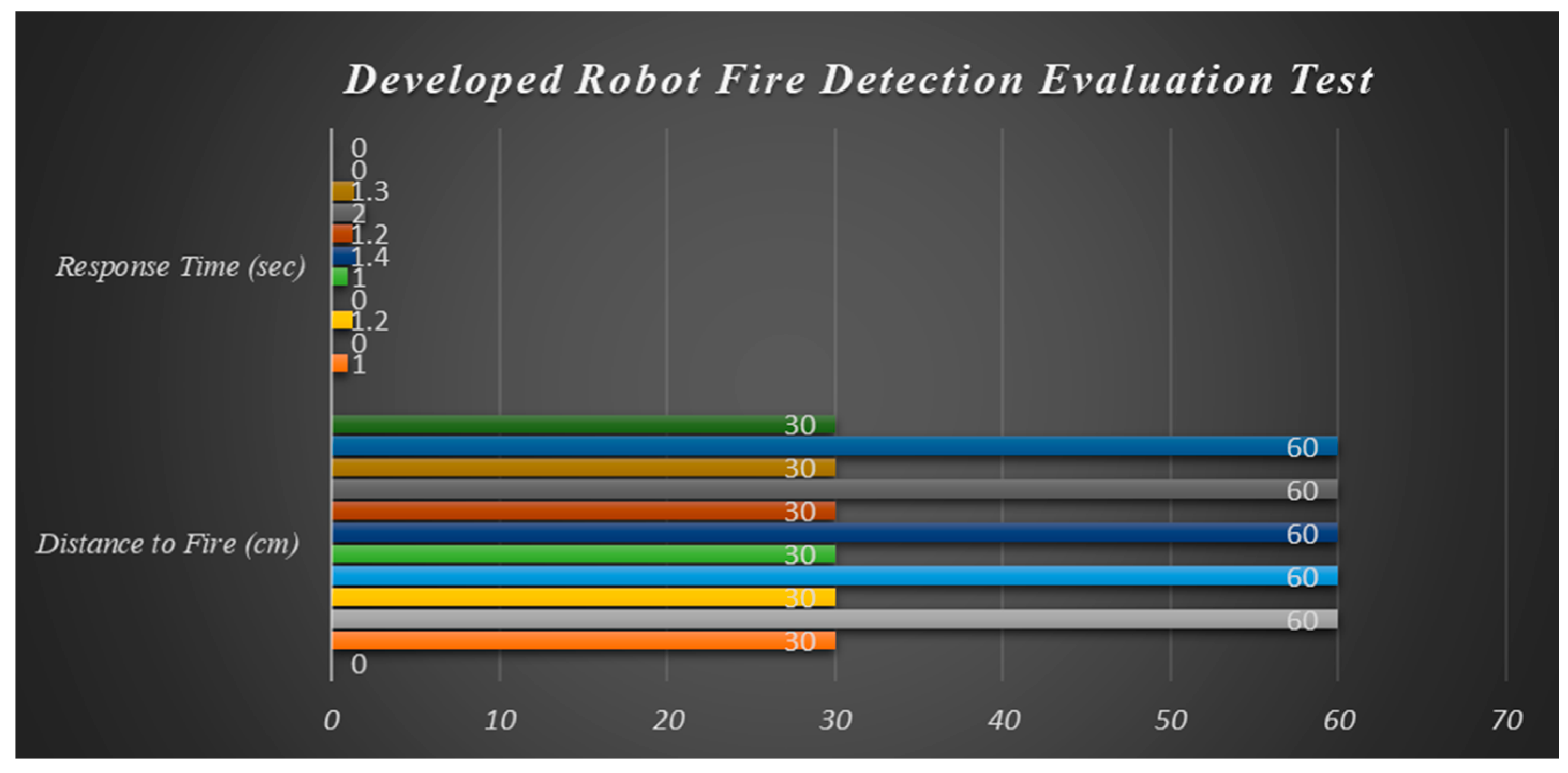
Using the simulation results as the control references, the components represented by the software were all assembled appropriately. Necessary software and algorithm were installed in the robot, and it was programmed to function as intended. Then the robot was tested and evaluated to determine its fire detection rate and maneuverability in terms of obstacle avoidance and fire/smoke detection about the in-drive position of the fire detection robot. The evaluation result is presented in Table 1 and depicted using a visualization of Figure 10.
Based on the circuitry description shown in Figure 9, the fire detection and firefighting robot remains on standby mode until either of the three-smoke/flame sensor(s) detects any fire/smoke within its sensing range. The threshold function settings available to determine the level of fire/smoke is available within the algorithm which the developed robot functions on to determine corresponding actions after a fire has been developed, but this is not specific because of variables such as the magnitude of the fire as well as the distance the fire is from the robot sensing device. The flame sensor detects Infrared rays emitted by fires. After testing the fire detection capability of the setup of flame sensors on the robot, results were classified as shown in Table 1, the magnitude of the fire was averagely the same and categorized into two, medium and small.
The ∞ indicated no or insignificant response time of the firefighting robot after sensing inconsequential fire/smoke magnitude, this means the flame was not detected in that iteration for the test. From our results, we noticed that flame detection became less efficient the more iterations of the tests we carried out. We realized that this was a result of the battery running low after use over time.
Figure 9.
ISIS Simulation diagram for the developed firefighting robot.
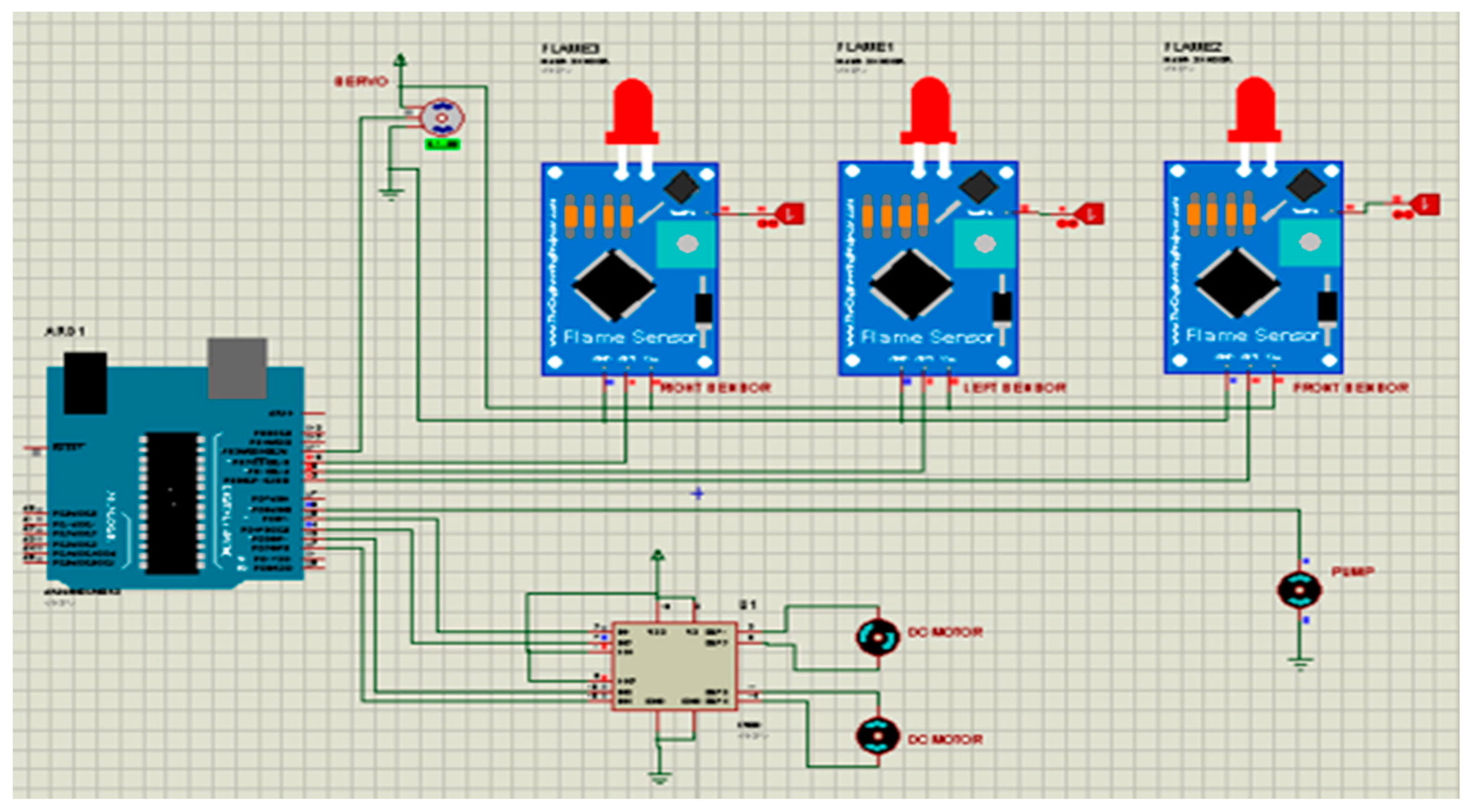
Figure 10.
The evaluation result of robot maneuverability and fire/smoke detection.
4.1. Actuating System
The motor driver and pump are connected to the Arduino circuit. When any of the flame sensors sense a flame, it reads 5V and sends a signal to the Arduino circuit which then actuates the motor driver and pumps accordingly for the robot to combat the detected fire, the robot begins to move towards the fire 0.3 seconds after detecting it. 0.3 seconds was observed to be the exact time it takes to move after sensing the fire and receiving the 5V reading from the flame sensors.
Figure 11 and Figure 12 shows that the tests were carried out in an environment that is not well-illuminated, this is because the flame sensors detect Infrared rays from fires, but it is not only fire that emit infrared rays. The flame sensors used in this project are not capable of properly distinguishing between the infrared rays emitted by fires and maybe sunlight or some electrical light sources. Hence the tests had to be carried out in such a poorly illuminated environment.
5. Conclusions
A major discovery from the research is the development of an intelligent algorithm that properly discriminates between fire and nonthreatening or deceptive conditions due to the introduction of embedded microelectronics technologies and an intelligent algorithm that drives the system which serves as an authentication or validator in proving false alarms. Also, the use of multiple sensors that combine smoke, thermal and the CO2 sensors further strengthen the fire detection capabilities from the evaluation analysis, it was inferred that the use of multiple fire sensors further enhances the capabilities of the fire detection rate. it was however noted that further research can be carried out to increase the capabilities of the firefighting robot where the firefighting robot has the 3D architecture mapping of the structure this will increase the image analysis/processing time for objects within the infrastructure, hence an increase in instructional navigation and mapping within the infrastructure to the location of the fire.
Author Contributions
Conceptualization, J.A.; methodology, J.A. and I.A.; validation, J.A. and C.N.; data curation I.A. and T.A.; writing—original draft preparation, J.A.; writing—review and editing, J.A., I.A. and C.N. All authors have read and agreed to the published version of the manuscript.
Data Availability Statement
Any required data can be gotten through the corresponding author.
Acknowledgments
We thank the management of Covenant University for the conducive environment under which this research is carried out and for publication support of the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419839596. [Google Scholar] [CrossRef]
- Aliff, M.; Sani, N.S.; Yusof, M.I.; Zainal, A. Development of fire fighting robot (QROB). Int. J. Adv. Comput. Sci. Appl. 2019, 10. [Google Scholar] [CrossRef]
- Lee, J.Y.; Ma, F.; Li, Y. Understanding homeowner proactive actions for managing wildfire risks. Nat. Hazards 2022, 114, 1525–1547. [Google Scholar] [CrossRef]
- Dhiman, A.; Shah, N.; Adhikari, P.; Kumbhar, S.; Dhanjal, I.S.; Mehendale, N. Firefighting robot with deep learning and machine vision. Neural Comput. Appl. 2022, 1–9. [Google Scholar] [CrossRef]
- Shakeriaski, F.; Ghodrat, M.; Nelson, D.J. Experimental and numerical studies on efficiency characterization of firefighters’ protective clothing: a review. J. Text. Inst. 2022, 113, 2549–2568. [Google Scholar] [CrossRef]
- Patle, B.K.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Alatise, M.B.; Hancke, G.P. A review on challenges of autonomous mobile robot and sensor fusion methods. IEEE Access 2020, 8, 39830–39846. [Google Scholar] [CrossRef]
- Rahardjo, H.A.; Prihanton, M. The most critical issues and challenges of fire safety for building sustainability in Jakarta. J. Build. Eng. 2020, 29, 101133. [Google Scholar] [CrossRef]
- Fernandez-Anez, N. Current wildland fire patterns and challenges in Europe: A synthesis of national perspectives. Air, Soil Water Res. 2021, 14, 11786221211028184. [Google Scholar] [CrossRef]
- Panigrahi, P.K.; Bisoy, S.K. Localization strategies for autonomous mobile robots: A review. J. King Saud Univ. Inf. Sci. 2022, 34, 6019–6039. [Google Scholar] [CrossRef]
- Rivas, J.G.; Toribio-Vázquez, C.; Taratkin, M.; Marenco, J.L.; Grossmann, R. Autonomous robots: a new reality in healthcare? A project by European Association of Urology-Young Academic Urologist group. Curr. Opin. Urol. 2021, 31, 155–159. [Google Scholar] [CrossRef]
- Tavakoli, M.; Carriere, J.; Torabi, A. Robotics, smart wearable technologies, and autonomous intelligent systems for healthcare during the COVID-19 pandemic: An analysis of the state of the art and future vision. Adv. Intell. Syst. 2020, 2, 2000071. [Google Scholar] [CrossRef]
- Rose, D.C.; Lyon, J.; de Boon, A.; Hanheide, M.; Pearson, S. Responsible development of autonomous robotics in agriculture. Nat. Food 2021, 2, 306–309. [Google Scholar] [CrossRef] [PubMed]
- Ghobadpour, A.; Monsalve, G.; Cardenas, A.; Mousazadeh, H. Off-road electric vehicles and autonomous robots in agricultural sector: trends, challenges, and opportunities. Vehicles 2022, 4, 843–864. [Google Scholar] [CrossRef]
- Santos, L.C.; Santos, F.N.; Pires, E.J.S.; Valente, A.; Costa, P.; Magalhães, S. Path planning for ground robots in agriculture: A short review. 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC); 2020; pp. 61–66. [Google Scholar]
- Guo, A.; Jiang, T.; Li, J.; Cui, Y.; Li, J.; Chen, Z. Design of a small wheel-foot hybrid firefighting robot for infrared visual fire recognition. Mech. Based Des. Struct. Mach. 2021, 1–20. [Google Scholar] [CrossRef]
- Guo, J.; Hou, Z.; Xie, X.; Yao, S.; Wang, Q.; Jin, X. Faster R-CNN Based Indoor Flame Detection for Firefighting Robot. 2019 IEEE symposium series on computational intelligence (SSCI); 2019; pp. 1390–1395. [Google Scholar]
- Mizuno, N. Enhanced path smoothing based on conjugate gradient descent for firefighting robots in petrochemical complexes . Adv. Robot. 2019, 33, 687–698. [Google Scholar] [CrossRef]
- Zhang, Z. Path planning of a firefighting robot prototype using GPS navigation. In Proceedings of the 2020 3rd International Conference on Robot Systems and Applications, 16–20. 2020. [Google Scholar]
- Seraj, E.; Silva, A.; Gombolay, M. Safe coordination of human-robot firefighting teams. arXiv Prepr. arXiv1903.0 6847, 2019. [Google Scholar]
- Prasojo, I.; Nguyen, P.T.; Shahu, N. Design of ultrasonic sensor and ultraviolet sensor implemented on a fire fighter robot using AT89S52. J. Robot. Control 2020, 1, 55–58. [Google Scholar] [CrossRef]
- Latif, A.; Shankar, K.; Nguyen, P.T. Legged fire fighter robot movement using PID. J. Robot. Control 2020, 1, 15–19. [Google Scholar] [CrossRef]
- Lee, D.-H.; Huynh, T.; Kim, Y.-B.; Soumayya, C. Motion control system design for a flying-type firefighting system with water jet actuators. in Actuators, 2021, 10, 275. [Google Scholar] [CrossRef]
- Jeyavel, J.; Prasad, A.A.; Shelke, K.M.; Sargade, P.D.; Thoke, U.V. Survey on fire fighting techniques using unmanned aerial vehicles. 2021 International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE); 2021; pp. 239–241. [Google Scholar]
- Prabha, B. An IoT based efficient fire supervision monitoring and alerting system. 2019 Third International conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud)(I-SMAC); 2019; pp. 414–419. [Google Scholar]
- Tamura, Y.; Amano, H.; Ota, J. Analysis of firefighting skill with a teleoperated robot. ROBOMECH J. 2020, 7, 1–14. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Ding, M.; Huang, C. Mobile robots in wireless sensor networks: A survey on tasks. Comput. Networks 2019, 148, 1–19. [Google Scholar] [CrossRef]
- Battina, D.S. The strategic impacts of Intelligent Automation for knowledge and service work: An interdisciplinary review. Int. J. Emerg. Technol. Innov. Res. (www. jetir. org) 2020, 2349–5162. [Google Scholar]
- Li, S. A Thermal Imaging Flame-Detection Model for Firefighting Robot Based on YOLOv4-F Model. Fire 2022, 5, 172. [Google Scholar] [CrossRef]
- Murad, A.; Bayat, O.; Marhoon, H.M. Implementation of rover tank firefighting robot for closed areas based on arduino microcontroller. 2021. [Google Scholar]
- Lingayat, A.B.; Chandramohan, V.P.; Raju, V.R.K.; Meda, V. A review on indirect type solar dryers for agricultural crops—Dryer setup, its performance, energy storage and important highlights. Appl. Energy 2020, 258, 114005. [Google Scholar] [CrossRef]
- Hostetter, H.; Naser, M.Z. Characterizing disability in fire evacuation: A progressive review. J. Build. Eng. 2022, 53, 104573. [Google Scholar] [CrossRef]
- Kargapolova, E.O.; Kuleshov, V.V.; Scuba, P.Y. Assessment of the Use of Robotic Equipment for Extinguishing Fires at Oil Refining Enterprises. in IOP Conference Series: Earth and Environmental Science, 2021, 720, 12086. [Google Scholar] [CrossRef]
- Jazebi, S.; De Leon, F.; Nelson, A. Review of wildfire management techniques—Part I: Causes, prevention, detection, suppression, and data analytics. IEEE Trans. Power Deliv. 2019, 35, 430–439. [Google Scholar] [CrossRef]
- Oliveira, L.F.P.; Moreira, A.P.; Silva, M.F. Advances in forest robotics: A state-of-the-art survey. Robotics 2021, 10, 53. [Google Scholar] [CrossRef]
- Manzello, S.L. Summary of workshop large outdoor fires and the built environment. Fire Saf. J. 2018, 100, 76–92. [Google Scholar]
- Han, B.; Hu, M.; Zheng, J.; Tang, T. Site selection of fire stations in large cities based on actual spatiotemporal demands: A case study of nanjing city. ISPRS Int. J. Geo-Information 2021, 10, 542. [Google Scholar] [CrossRef]
- Wang, D. Economic footprint of California wildfires in 2018. Nat. Sustain. 2021, 4, 252–260. [Google Scholar]
- Mazuchowski, E.L. Mortality review of US Special Operations Command battle-injured fatalities. J. Trauma Acute Care Surg. 2020, 88, 686–695. [Google Scholar] [CrossRef]
- Sukach, R.; Kovalyshyn, V.; Kyryliv, Y. Extinguishing tactics and fire-fighting equipment for extinguishing fires in peat-forest ecosystems . . 2021.
- Shakeriaski, F.; Ghodrat, M.; Rashidi, M.; Samali, B. Smart coating in protective clothing for firefighters: An overview and recent improvements. J. Ind. Text. 2022, 51, 7428S–7454S. [Google Scholar] [CrossRef]
- Jevtić, R. On a flame detectors. Vatrog. i Upravlj. požarima 2021, 11, 38–51. [Google Scholar]
- Avazov, K.; Mukhiddinov, M.; Makhmudov, F.; Cho, Y.I. Fire detection method in smart city environments using a deep-learning-based approach. Electronics 2021, 11, 73. [Google Scholar] [CrossRef]
- Jang, D.-W. Long range fire detection using a parabolic sound reflecting plate based on sound field variation. in INTER-NOISE and NOISE-CON Congress and Conference Proceedings, 2020, 261, 640–647. [Google Scholar]
- Wilk-Jakubowski, J.L.; Stawczyk, P.; Ivanov, S.; Stankov, S. Control of acoustic extinguisher with Deep Neural Networks for fire detection. Elektron. ir Elektrotechnika 2022, 28, 52–59. [Google Scholar] [CrossRef]
- Martinsson, J.; Runefors, M.; Frantzich, H.; Glebe, D.; McNamee, M.; Mogren, O. A Novel Method for Smart Fire Detection Using Acoustic Measurements and Machine Learning: Proof of Concept. Fire Technol. 2022, 58, 3385–3403. [Google Scholar] [CrossRef]
- Lin, L. A spatio-temporal model for forest fire detection using HJ-IRS satellite data . Remote Sens. 2016, 8, 403. [Google Scholar] [CrossRef]
- Koceski, S.; Koceska, N. Evaluation of an assistive telepresence robot for elderly healthcare. J. Med. Syst. 2016, 40, 1–7. [Google Scholar] [CrossRef]
- Ayoade, I.; Adedigba, A.; Adeyemi, O.A.; Adeaga, O.A.; Akanbi, O. Trends and prospects of digital twin technologies: a review. Quantum J. Eng. Sci. Technol. 2022, 3, 11–24. [Google Scholar]
- Oluwabunmi, T.L.; Adenugba, O.; Ayoade, I.A.; Azeta, J.; Bolu, C.A. Development of an Autonomous Vehicle for Smart Irrigation. 2022 5th Information Technology for Education and Development (ITED); 2022; pp. 1–7. [Google Scholar]
- Kim, J.-H.; Park, Y.-J.; Yi, C.-Y.; Lee, D.-E. Stochastic flame locating method hybridizing Kalman filter and deep neural network for rapid fire response at construction sites. J. Build. Eng. 2023, 66, 105967. [Google Scholar] [CrossRef]
- Li, Y. Plant-Wearable Sensors for Intelligent Forestry Monitoring . Adv. Sustain. Syst. 2023, 7, 2200333. [Google Scholar] [CrossRef]
- Avila-Avendano, C.; Pintor-Monroy, M.I.; Ortiz-Conde, A.; Caraveo-Frescas, J.A.; Quevedo-Lopez, M.A. Deep UV sensors enabling solar-blind flame detectors for large-area applications. IEEE Sens. J. 2021, 21, 14815–14821. [Google Scholar] [CrossRef]
- Kushnir, A.; Kopchak, B. Development of Multiband Flame Detector with Fuzzy Correction Block. 2021 IEEE XVIIth International Conference on the Perspective Technologies and Methods in MEMS Design (MEMSTECH); 2021; pp. 58–63. [Google Scholar]
- Nguyen, T.M.H.; Shin, S.G.; Choi, H.W.; Bark, C.W. Recent advances in self-powered and flexible UVC photodetectors. in Exploration, 2022, 2, 20210078. [Google Scholar] [CrossRef] [PubMed]
- Wen, Z.; Xie, L.; Feng, H.; Tan, Y. Infrared flame detection based on a self-organizing TS-type fuzzy neural network. Neurocomputing 2019, 337, 67–79. [Google Scholar] [CrossRef]
- Wen, Z.; Xie, L.; Feng, H.; Tan, Y. Robust fusion algorithm based on RBF neural network with TS fuzzy model and its application to infrared flame detection problem. Appl. Soft Comput. 2019, 76, 251–264. [Google Scholar] [CrossRef]
- Mehdiyeva, A.; Alieva, L.; Huseynov, B.; Quliyeva, S. Development of Diagnostic and Control System for SMART Home”.
- Bu, F.; Gharajeh, M.S. Intelligent and vision-based fire detection systems: A survey. Image Vis. Comput. 2019, 91, 103803. [Google Scholar]
- Valikhujaev, Y.; Abdusalomov, A.; Cho, Y.I. Automatic fire and smoke detection method for surveillance systems based on dilated CNNs. Atmosphere (Basel). 2020, 11, 1241. [Google Scholar] [CrossRef]
Figure 1.
Schematic diagram of the fire-fighting robot.

Figure 2.
3D structure of the prototype autonomous fire detection.
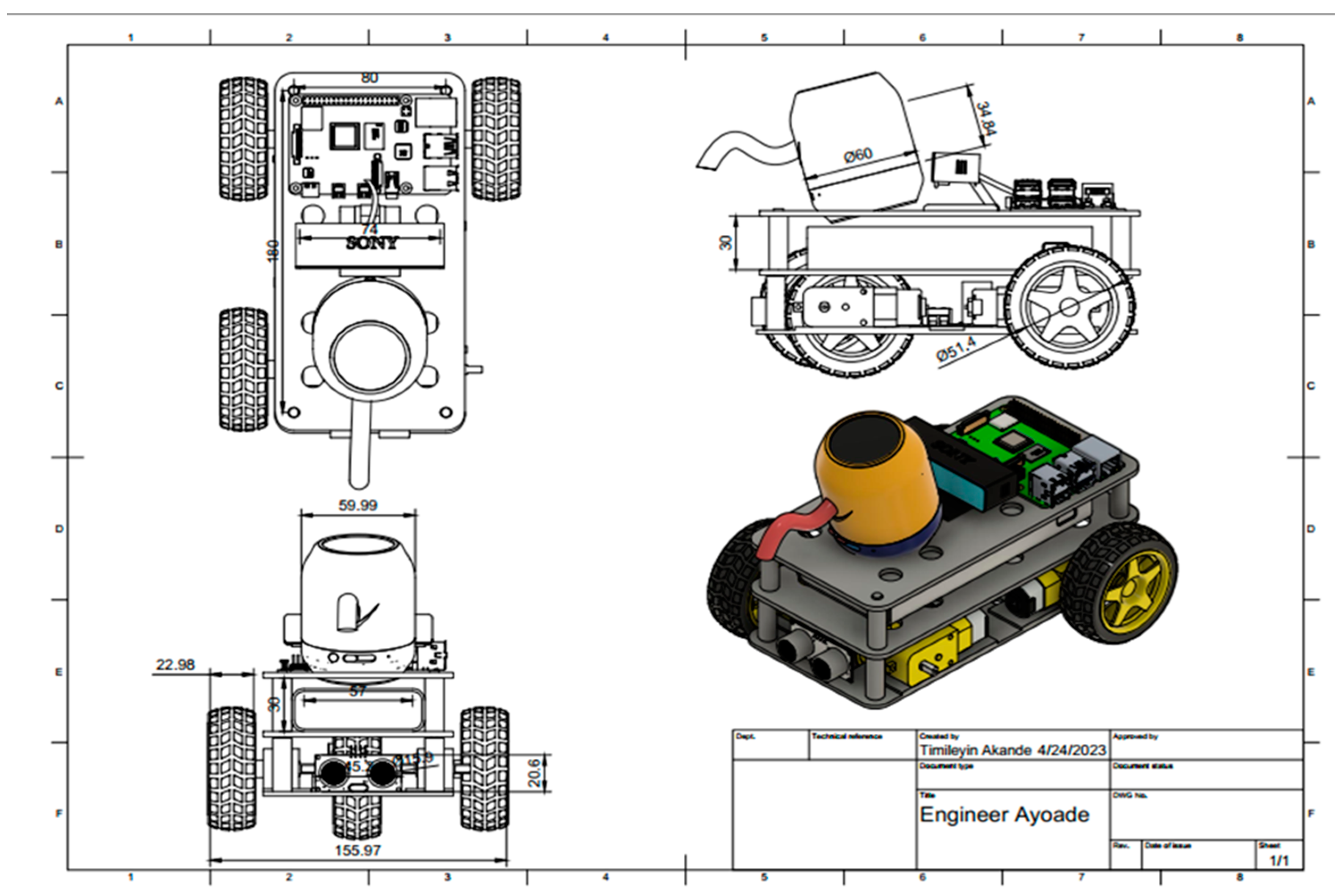
Figure 5.
Circuit diagram of the infrared flame/fire detection sensors.
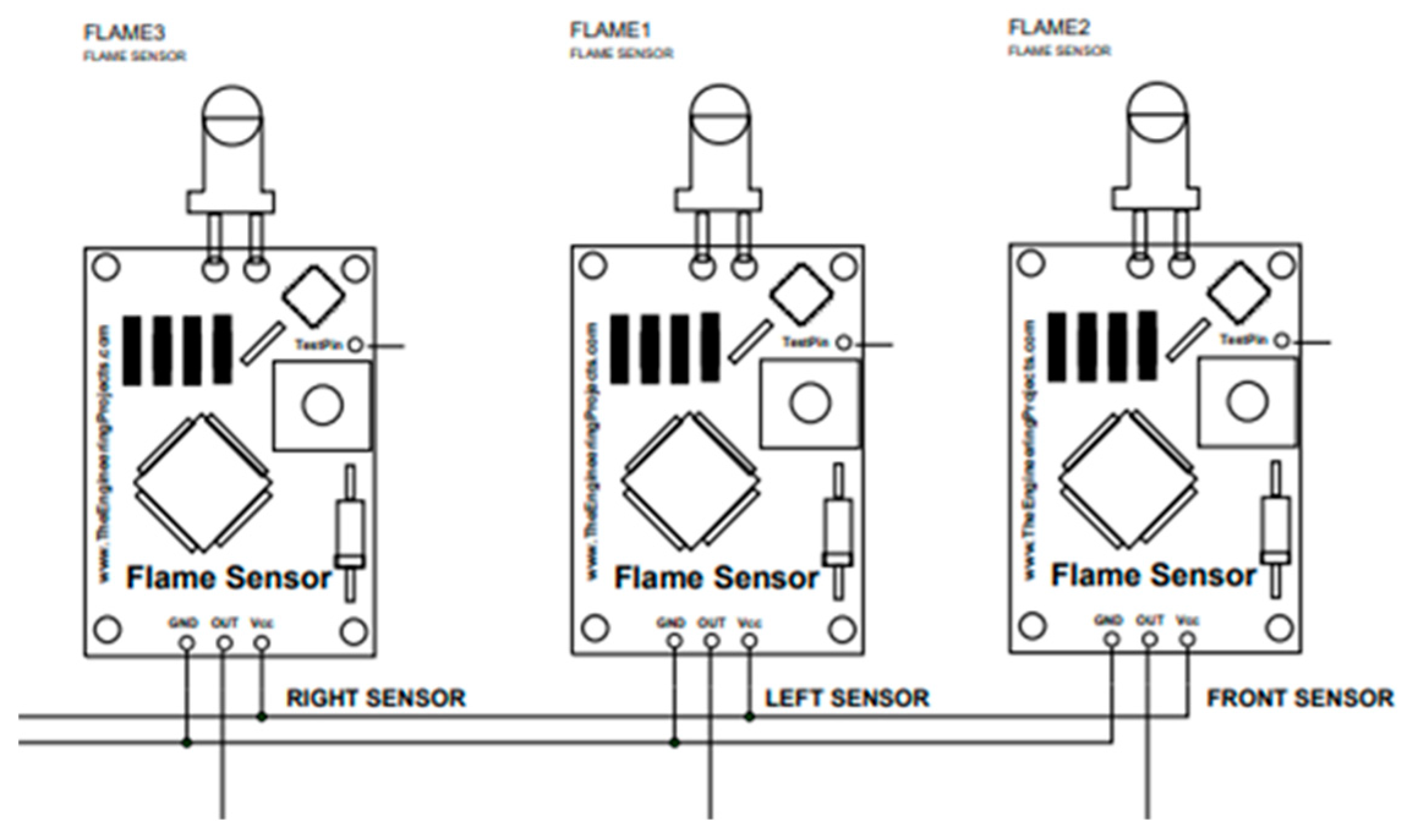
Figure 6.
Boost converter module in circuitry.
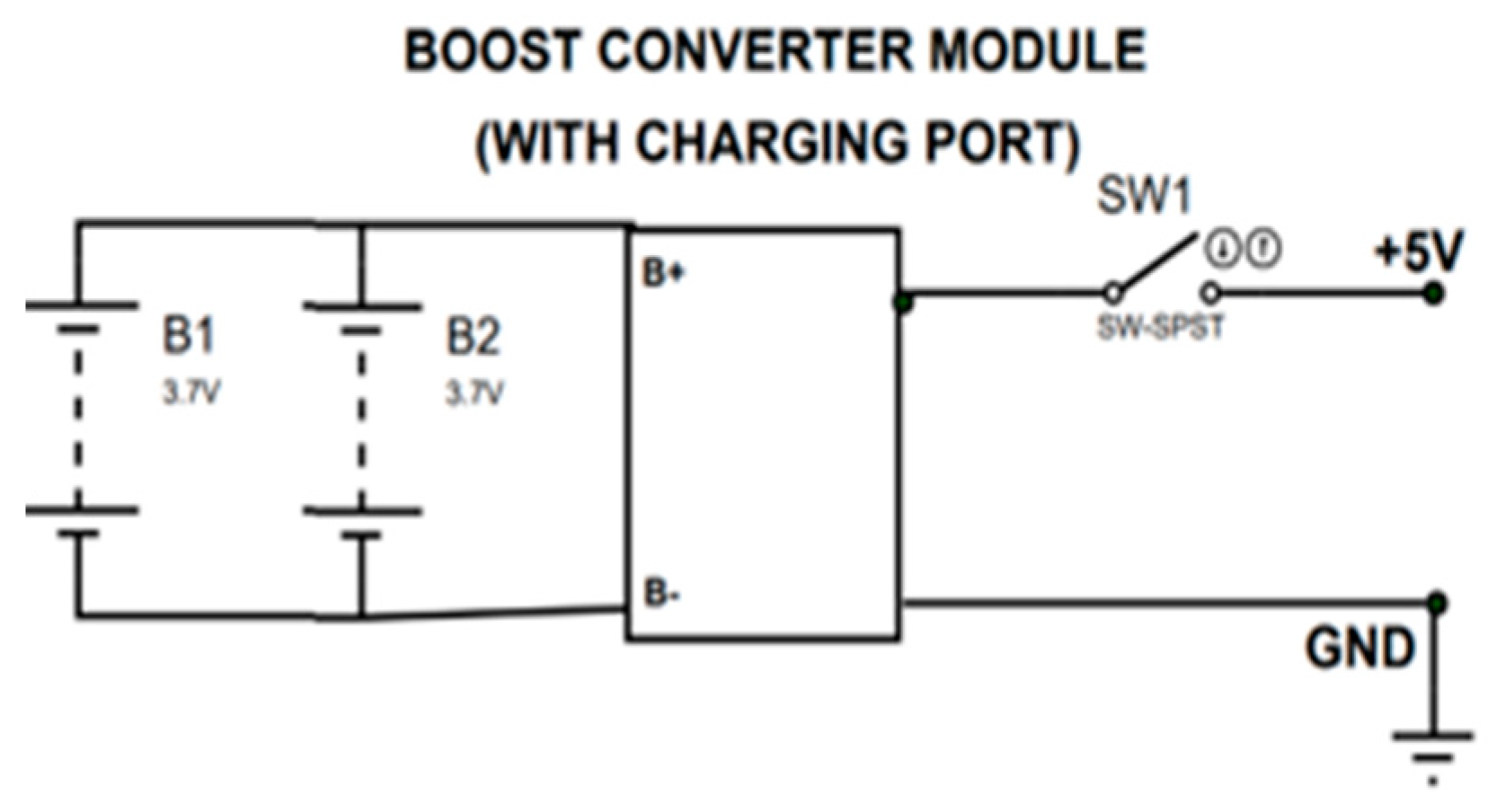
Figure 7.
Proteus Simulation of the firefighting robot.
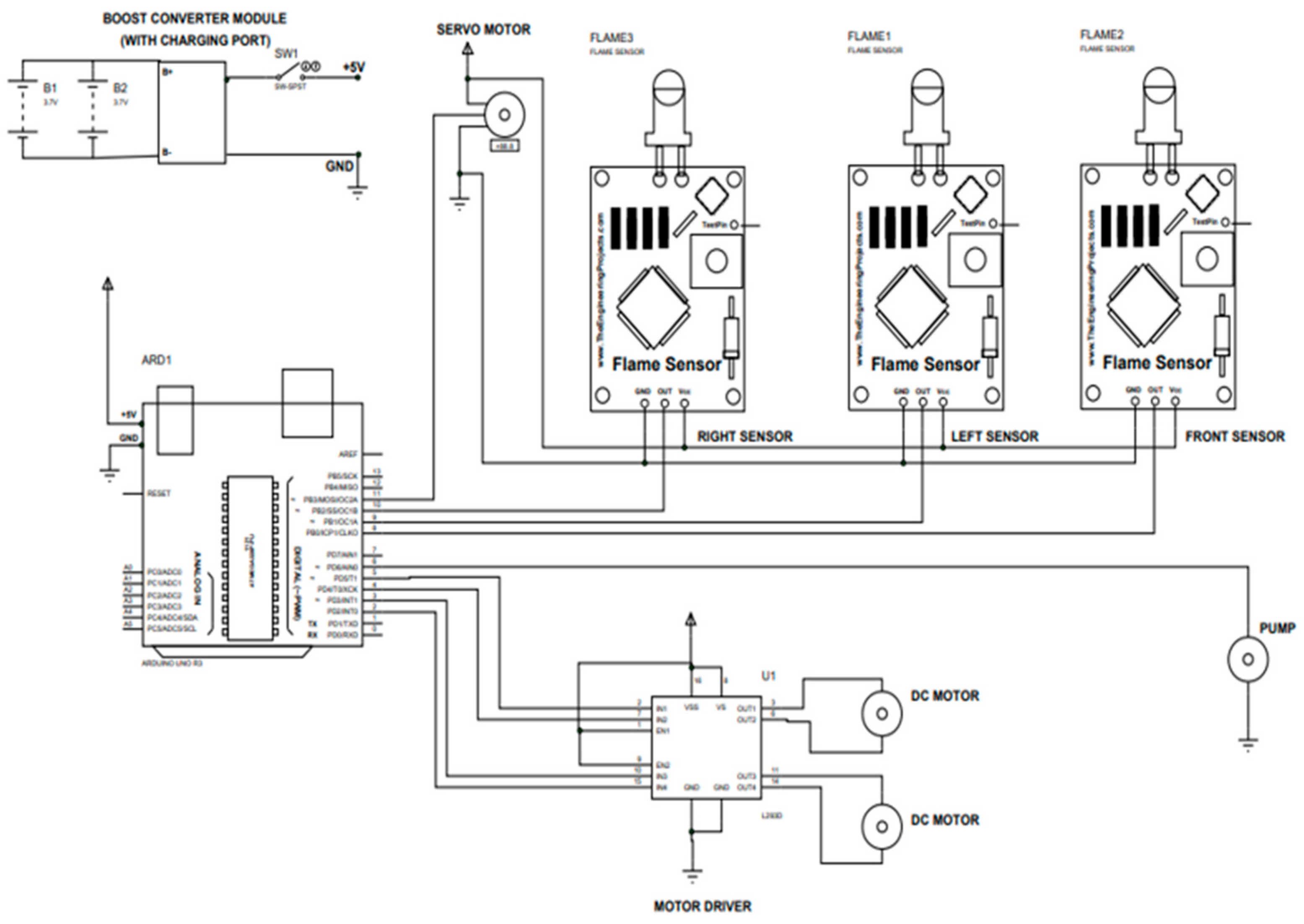
Figure 8.
Operation algorithm of the prototype Firefighting robot.
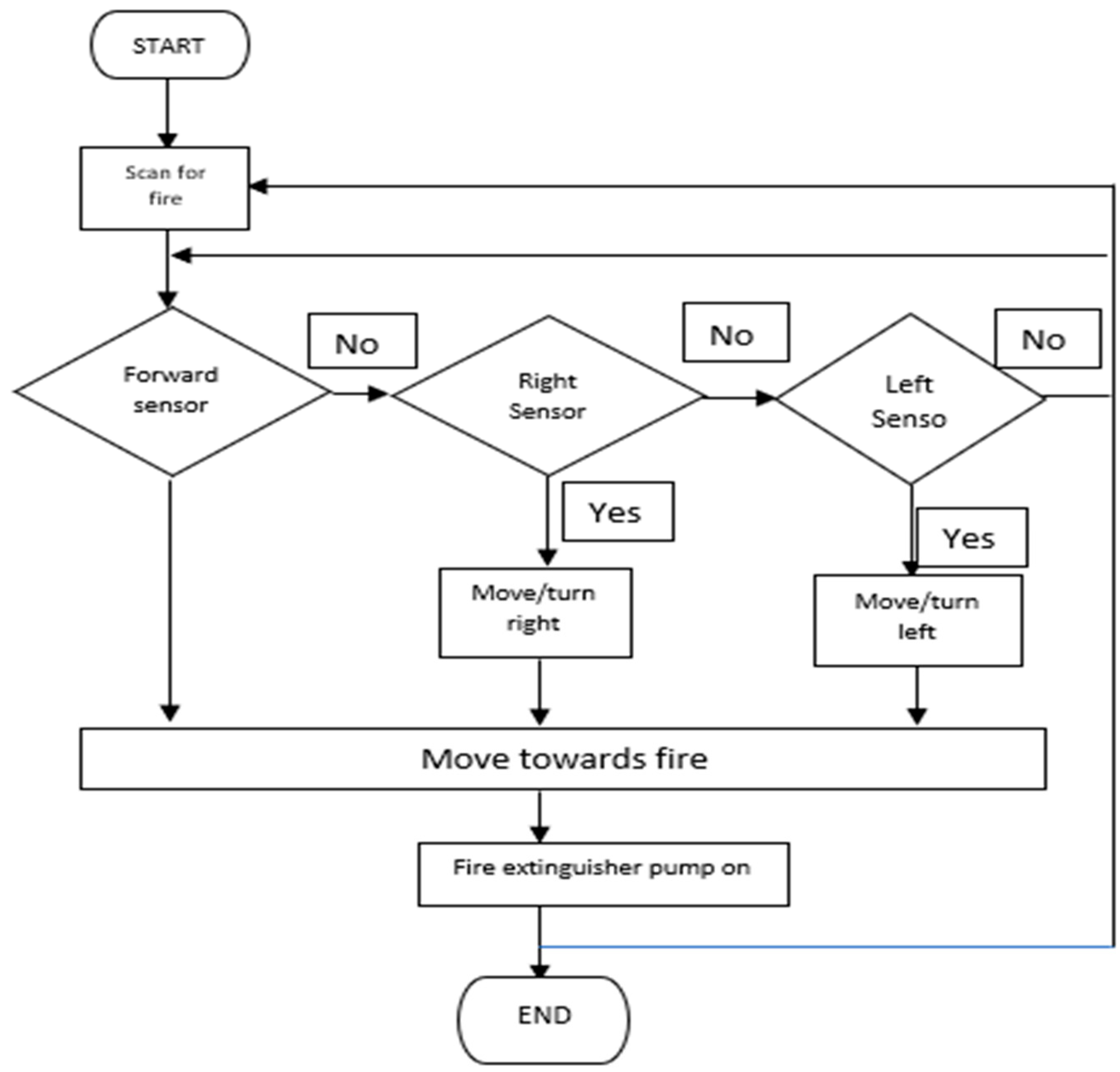
Figure 11.
Robot maneuverability test.

Figure 12.
Fire/flame detection test.


Table 1.
Results of Flame Detection Evaluation Tests.
| S/N | Flame Sensor | Flame Size | Distance (cm) | Response Time (sec) |
| 1 | Left | Small | 60 | ∞ |
| 2 | Left | Small | 30 | 1.0 |
| 3 | Right | Small | 60 | ∞ |
| 4 | Right | Small | 30 | 1.2 |
| 5 | Front | Small | 60 | ∞ |
| 6 | Front | Small | 30 | 1.0 |
| 7 | Left | Medium | 60 | 1.4 |
| 8 | Left | Medium | 30 | 1.2 |
| 9 | Right | Medium | 60 | 2.0 |
| 10 | Right | Medium | 30 | 1.3 |
| 11 | Front | Medium | 60 | ∞ |
| 12 | Front | Medium | 30 | ∞ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



