
Submitted:
25 July 2023
Posted:
26 July 2023
You are already at the latest version
Abstract
Wearable touch sensors, which can convert force or pressure signals into quantitative electronic signals, have emerged as an essential smart sensing devices and played an important role in various cutting-edge fields, including wearable health monitoring, soft robots, electronic skin, artificial prosthetics, AR/VR, and the Internet of Things. Flexible touch sensors have made significant advancements, while construction of novel touch sensors via mimicking the unique properties of biological materials and biogenetic structures always remains a hot research topic and significant technological pathway. This review provides a comprehensive summary of the research status of wearable touch sensors constructed by imitating the material and structural characteristics in nature, and also summarizes the scientific challenges and development tendency of this aspect. Firstly, the research status for constructing flexible touch sensors based on biomimetic materials is summarized, including hydrogel materials, self-healing materials, and other bioinspired or biomimetic materials with extraordinary properties. Then, design and fabrication of flexible touch sensors based on bionic structures for performance enhancement are fully discussed. These bionic structures include special structures in plants, special structures insects/animal, and special structures in human body. Moreover, a summary of the current issues and future prospects for developing wearable sensors based on bioinspired materials and structures is discussed.
Keywords:
flexible touch sensor
; biomimetics
; bio‐inspired material
; bio‐inspired structure
; bioinspired sensor
1. Introduction
Wearable and flexible touch sensors are electrical devices that can translate pressure or force into electronic signals with wide range applications, including electronic skins [1], soft robotics [2], and human-computer interaction [3]. In addition, wearable touch sensors can be used to detect the vital signs (e.g., pulse signal, heart rate, respiration, speech, joint movements, etc.) related to human health conditions [4,5,6,7,8], making them indispensable for wearable health monitoring and personal healthcare in the future [9]. Flexible touch sensors have made considerable advancements in recent years, reporting on ultrahigh device performance (e.g., high sensitivity, broad working range, fast response, low detection limit, low power consumption, etc.) [7,10,11,12,13] and diverse functionalities (e.g., biocompatibility, self-powering capability, biodegradability, self-healing capability, etc.) [14,15,16,17]. In the construction of the aforementioned wearable touch sensors, a variety of the novel materials (e.g., flexible polymers [18], stretchable elastomers [19], soft hydrogels [20], etc.) and unique structures (e.g., pyramid [21], hemisphere [22], cylinder [23], cilia [24], crack [25], etc.) have played an importance role in the enhancement and realization of high sensing performance and unique device functionalities.
Creatures in nature (including plants, insects, animals, etc.) have evolved over millions of years, developing a diversity of special skills and adaptive capacities. In the evolutionary process of various creatures, the unique properties of biomaterials and biological structures play a crucial role. These biogenetic materials and structures possess outstanding properties derived from natural selection. These properties include good flexibility or even stretchability, biological self-healing capability, high sensitivity to external stimulations (e.g., mechanical and thermal stimuli [26]), mechanoluminescence properties [27], multifunctionality enabled by hierarchical structures [28]. The development of artificial touch sensors is always inspired by the unique characteristics of biomaterials and biological structures.
By mimicking the unique properties (e.g., softness, stretchability, ionic conduction, self-healing, special surficial patterns, hierarchical structures, etc.) of natural materials and structures, a novel range of wearable touch sensors with extraordinary characteristics can be developed. For instance, ionically conducting hydrogel and self-healing materials can be utilized to fabricate bioinspired touch sensors and artificial e-skins with good softness, self-repairing capability, and skin-attaching comfortness. [16] In addition, biological hierarchical structural can be mimicked to construct novel touch sensing devices with both mechanical sensitivity and broad detection range. [29] Therefore, mimicking natural materials and structures holds promise for developing sustainable, high-performance, and biocompatible wearable touch sensors. Bioinspired flexible touch sensors also exhibit tremendous application potential in various fields, particularly for intelligent soft robots and wearable health monitoring.
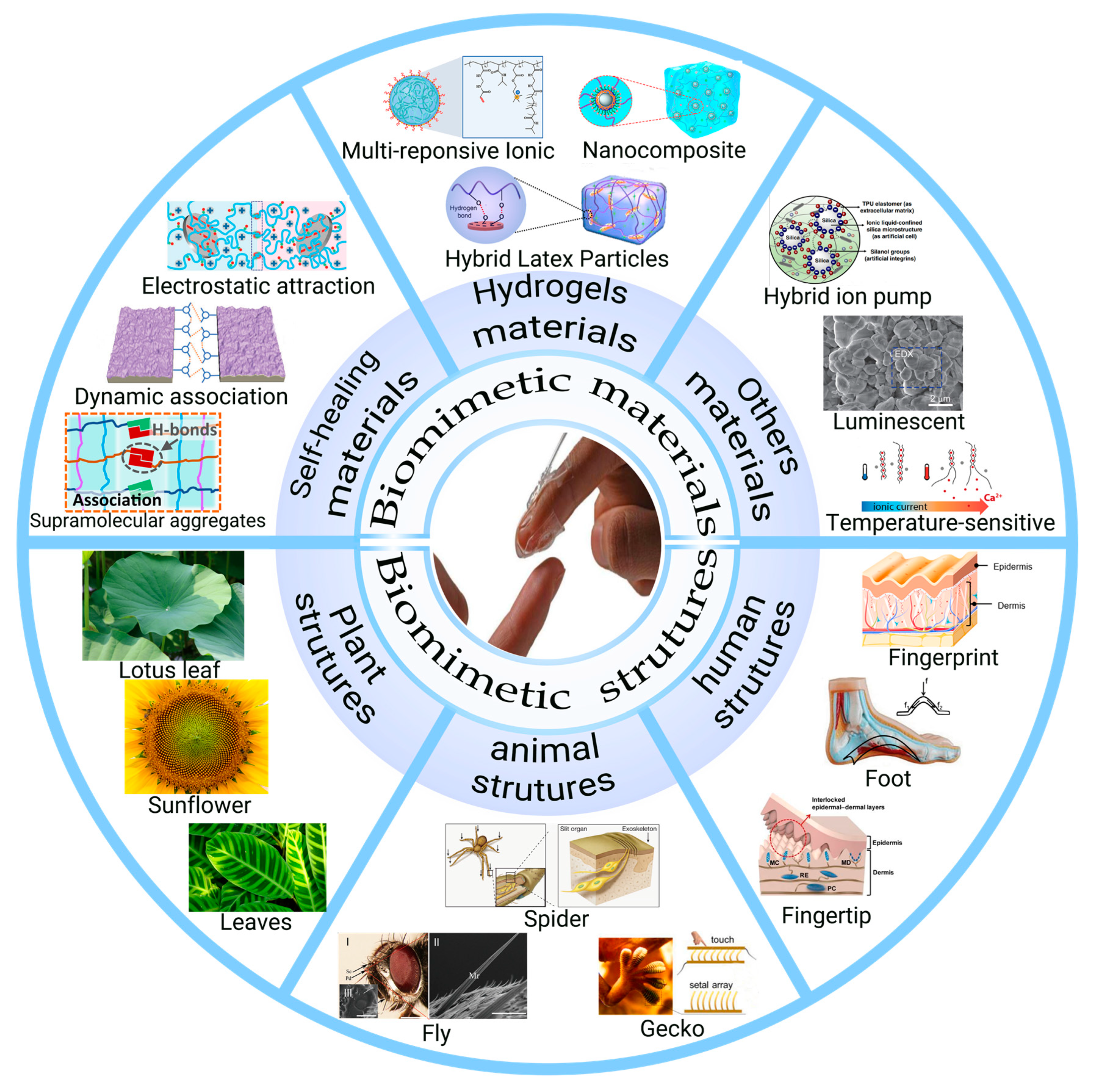
In this review, we outline the current research status of bioinspired wearable touch sensors via mimicking the properties of materials (e.g., hydrogel materials, self-healing materials, and other bioinspired materials) and structures (including structures of plants, animals, and human) found in nature (Figure 1). We categorize our paper into two implementations: the fabrication of flexible touch sensors with unique features that exist in natural materials and the enhancement of touch sensor performance by employing biological structures. Furthermore, we summarize the existing challenges of bionic touch sensors and present a future outlook for the development of wearable touch sensors.
Figure 1.
Overview of inspired wearable touch sensors via mimicking the properties of materials and structures in nature. (Reproduced with permission from Ref. [30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47], Copyright 2021, Advanced Materials Technologies; Copyright 2019, Chemistry of Materials; Copyright 2022, Nano Energy; Copyright 2019, Nat Commun; Copyright 2018, Advanced Electronic Materials; Copyright 2020, Adv Mater; Copyright 2017, Science Robotics; Copyright 2020, ACS Appl Mater Interfaces; Copyright 2015, Adv Mater; Copyright 2022, Nano Energy; Copyright 2016, Small; Copyright 2018, Science Robotics; Copyright 2022, Adv Sci; Copyright 2018, Advanced Functional Materials; Copyright 2023, Biomater Sci; Copyright 2014, ACS Nano; Copyright 2014, Nature; Copyright 2023, Nat Commun).
Figure 1.
Overview of inspired wearable touch sensors via mimicking the properties of materials and structures in nature. (Reproduced with permission from Ref. [30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47], Copyright 2021, Advanced Materials Technologies; Copyright 2019, Chemistry of Materials; Copyright 2022, Nano Energy; Copyright 2019, Nat Commun; Copyright 2018, Advanced Electronic Materials; Copyright 2020, Adv Mater; Copyright 2017, Science Robotics; Copyright 2020, ACS Appl Mater Interfaces; Copyright 2015, Adv Mater; Copyright 2022, Nano Energy; Copyright 2016, Small; Copyright 2018, Science Robotics; Copyright 2022, Adv Sci; Copyright 2018, Advanced Functional Materials; Copyright 2023, Biomater Sci; Copyright 2014, ACS Nano; Copyright 2014, Nature; Copyright 2023, Nat Commun).
2. Bioinspired materials for construction of flexible touch sensors
Living creatures that survive in the long process of natural selection exhibit extraordinary abilities and functionalities to adapt to changes in the environment. Many of these special abilities and functionalities arise from the natural materials with unique biological, mechanical, or even electrical properties (e.g., softness, toughness, stretchability, self-healing ability, mechanoluminescence, etc.). [48,49,50] Scientists are always seeking and creating artificial materials to mimic these remarkable properties, which is especially frequently common in the design and construction of novel touch sensors by using biological and bioinspired materials. In this section, we will summarize the current developments in the fabrication of novel flexible touch sensors based on bioinspired materials, including, hydrogels, self-healing materials, and other kind of biomimicking materials.
2.1. Touch sensors based on hydrogel materials
Hydrogels are 3D cross-linked hydrated polymer networks that, like human organs, can store exceptionally high quantities of water. The mechanical properties of the hydrogels, such as their stretchability, toughness, flowability, and softness, can be freely altered and controlled during the synthesis process [55,56]. To gain electrical or ionic conductivity of hydrogels for sensing functionality, conducting fillers or ionic salts can be introduced into the hydrogels [57]. Additionally, the mechanical properties, electrochemical characteristics, and biological functions of creature can be simulated by modifying the network structures or functional groups of hydrogels [56,58], providing great possibility for designing and fabricating flexible touch sensors. Hydrogel materials can also have unique features and different functionalities by changing the conductive filler, dopant, cross-linker, or hydration state, exhibiting great application potential in the emerging areas of bionic flexible devices [59], flexible energy storage devices [60], and human-machine interfaces [54].
Hydrogels have outstanding softness, flexibility, stretchability, high transparency, and biocompatibility, making them ideal candidates for constructing electrodes in flexible sensors. Sarwar et al. developed a new kind of touch sensors using stretchy conductive hydrogel as the electrodes [61]. This flexible sensor overcomes the trade-off between optical transparency and electrical conductivity. The conductive hydrogel remains highly transparent due to its dielectric properties at optical wavelengths. Although the electrical conductivity of these hydrogel electrodes is lower than that of indium tin oxide by a factor of 1000, it does not hinder their capacitive sensing performance. By coupling these ion water gel electrodes with silicon-based elastomer capacitors, a novel ion skin can be created. It exhibits strong interaction with proximal fingers, allowing for easy differentiation between finger touch and stretching and bending. This technology enables the operating mode of flexible sensors to extend to close-range detection of fingers.
Additionally, hydrogels can also serve as desirable electrode materials for fabricating triboelectric nanogenerator-based touch sensing devices. Pu et al. created a soft, skin-like triboelectric nanogenerator (STENG) that utilizes ionic hydrogels as electrodes to harvest biomechanical energy and realize touch sensing functionality (Figure 2a) [51]. These hydrogel electrodes possess skin-like mechanical properties and perfect adhesion capability to the skin, exhibiting high signal accuracy and exceptional wearing comfort. The STENG consists of two elastomeric membranes - polydimethylsiloxane (PDMS) and 3M VHB 9469, which enclose the ionic hydrogels (PAAm-LiCl hydrogels) composed of polyacrylamide (PAAm) hydrogels and lithium chloride (LiCl). Electrical connections are established by attaching Al strips or Cu wires to the hydrogel electrodes. This STENG, with high transparency to visible colors (Figure 2c) and ultra-high stretchability (Figure 2d), can operate in a single electrode mode sensing modality (Figure 2b) and can achieve instantaneous surface power densities of 35 mW m-2 and open-circuit output voltages of up to 145 V. The electronic skin made from the hydrogel based STENG exhibit a mechanical sensitivity of 0.013 kPa-1 (Figure 2e) and detection limit of 1.3 kPa (Figure 2f), making it a desirable soft touch sensor that can conformally attach to the dynamically curved skin (Figure 2g).
Figure 2.
Fabrication of flexible touch sensors based on soft hydrogel materials. a) Diagram of the sandwich-style STENG sensors. b) Scheme of the working mechanism of the STENG sensors. c) A STENG sensor that is transparent to all visible colors. d) A STENG sensor at original state (=0) and stretched state (=1000%). e) Variation in the voltage output across a resistor (20 megohm) at the peak amplitudes. f) Representative voltage outputs of STENG sensor under five distinct pressures. g) A photograph showing a hand with an affixed 3×3-pixels touch sensor. (Reprinted with permission from Ref. [51], Copyright 2017, Science Advances) h) The chemical composition of the ACC/PAA/alginate mineral hydrogel. i) Diagram showing the relationship between the frequency and the storage (G′) and loss (G′′) moduli of the ACC/PAA/alginate and ACC/PAA hydrogels. j-k) Images demonstrating the shape-change ability of the ACC/PAA/alginate hydrogel. l) Schematic showing the design of the ionic skin based on ACC/PAA/alginate hydrogel. m) Response curve of the hydrogel pressure sensor in the range of 0–1 kPa. (Reprinted with permission from Ref. [52], Copyright 2017, Adv Mater) n) Schematic of a 1D ionic touch sensing strip. o) Diagram illustrating the working principle of a 2D ionic touch panel positioning system. p) The linear relationship between the current and the distance of the touch point at (i) =0 and (ii) =200%. q) Schematic illustrating an epidermal touch panel established on a VHB substrate. r) The touch panel was attached to an arm. s, t) Human machine interfacing applications with the epidermal touch panel, including s) writing words and t) playing chess. (Reprinted with permission from Ref. [53], Copyright 2016, Science) u) Comparison in properties of polyionic elastomer, human skin, and other reported skin-like materials. v) Diagram showing the different bionic receptors on the artificial skin. w) Photographs of the polyionic skin. scale bar: 1 cm. (Reprinted with permission from Ref. [54], Copyright 2017, Materials Horizons).
Figure 2.
Fabrication of flexible touch sensors based on soft hydrogel materials. a) Diagram of the sandwich-style STENG sensors. b) Scheme of the working mechanism of the STENG sensors. c) A STENG sensor that is transparent to all visible colors. d) A STENG sensor at original state (=0) and stretched state (=1000%). e) Variation in the voltage output across a resistor (20 megohm) at the peak amplitudes. f) Representative voltage outputs of STENG sensor under five distinct pressures. g) A photograph showing a hand with an affixed 3×3-pixels touch sensor. (Reprinted with permission from Ref. [51], Copyright 2017, Science Advances) h) The chemical composition of the ACC/PAA/alginate mineral hydrogel. i) Diagram showing the relationship between the frequency and the storage (G′) and loss (G′′) moduli of the ACC/PAA/alginate and ACC/PAA hydrogels. j-k) Images demonstrating the shape-change ability of the ACC/PAA/alginate hydrogel. l) Schematic showing the design of the ionic skin based on ACC/PAA/alginate hydrogel. m) Response curve of the hydrogel pressure sensor in the range of 0–1 kPa. (Reprinted with permission from Ref. [52], Copyright 2017, Adv Mater) n) Schematic of a 1D ionic touch sensing strip. o) Diagram illustrating the working principle of a 2D ionic touch panel positioning system. p) The linear relationship between the current and the distance of the touch point at (i) =0 and (ii) =200%. q) Schematic illustrating an epidermal touch panel established on a VHB substrate. r) The touch panel was attached to an arm. s, t) Human machine interfacing applications with the epidermal touch panel, including s) writing words and t) playing chess. (Reprinted with permission from Ref. [53], Copyright 2016, Science) u) Comparison in properties of polyionic elastomer, human skin, and other reported skin-like materials. v) Diagram showing the different bionic receptors on the artificial skin. w) Photographs of the polyionic skin. scale bar: 1 cm. (Reprinted with permission from Ref. [54], Copyright 2017, Materials Horizons).
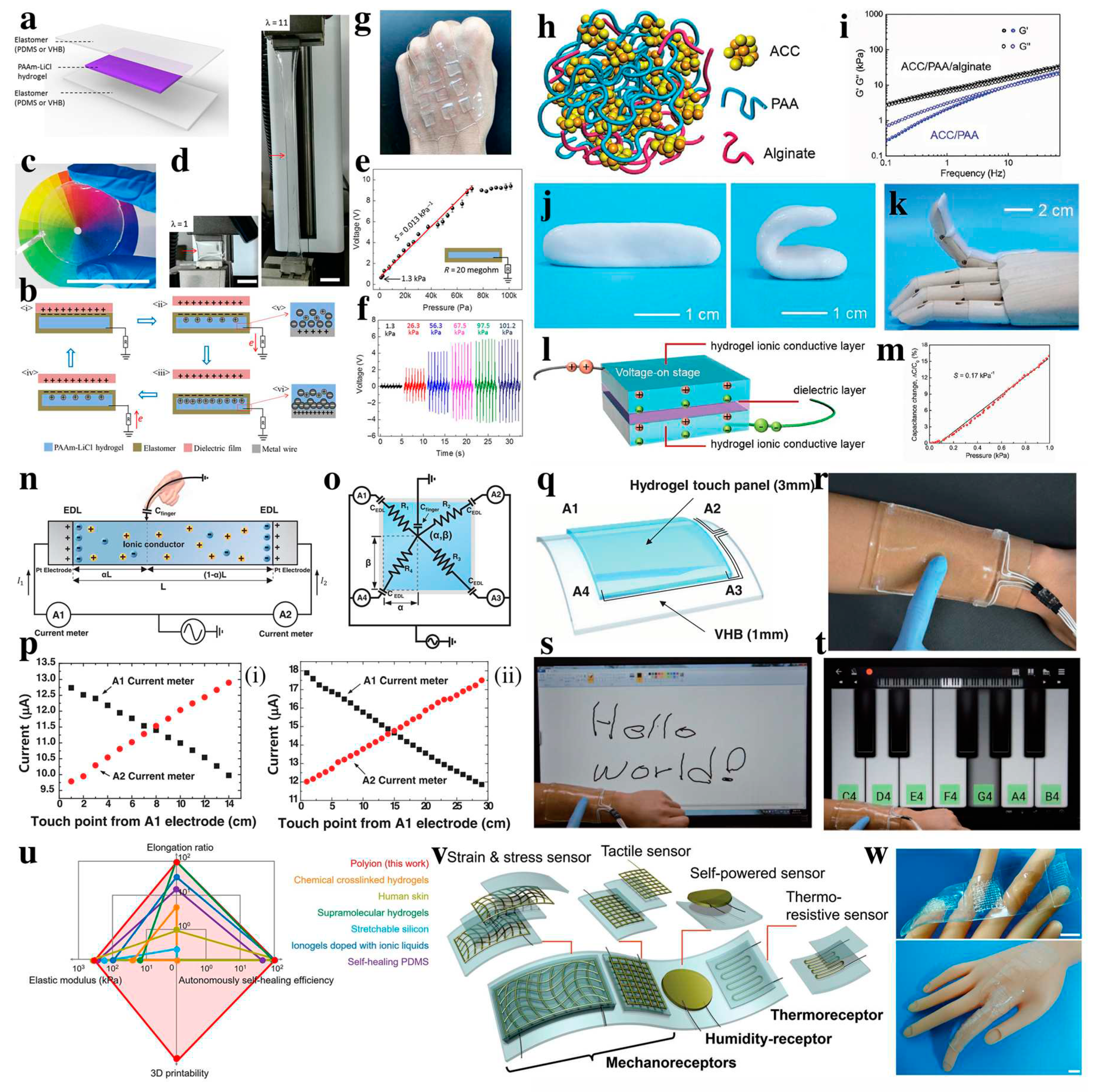
Recently, Sun developed an “ionic skin” that use hydrogels or other ionic gels as conductors for ionic conduction. This strategy greatly enhances the designability of artificial intelligent skins with touch sensing functionality that combine biocompatibility and high stretchability [62]. In addition, Lei and associates have created an ionic skin using a bioinspired supramolecular mineral hydrogel [52]. This hydrogel is composed of amorphous calcium carbonate (ACC) nanoparticles, physically cross-linked alginate, and polyacrylic acid (PAA) chains (Figure 2h). The resulting ionic skin are self-healable, highly sensitive, and mechanically flexible. The ACC/PAA/alginate hydrogel is formable, elastic, and highly stretchable (Figure 2j) and can conform well to curved or dynamic surfaces, (such as a dynamic prosthetic finger Figure 2k). This is due to the fact that Ca2+ in alginate possesses a stronger chelating effect than PAA. By introducing an appropriate ratio of alginate, the hydrogel can be put in an excellent semi-solid state, that is, when the material storage modulus is essentially equivalent to the loss modulus (Figure 2i). Using the developed hydrogel, a capacitive pressure sensor was created by combining two hydrogel films with a dielectric layer, as shown in Figure 2l [52]. The change in capacitance of the sensor is in good linear relationship with the compressive pressure (Figure 2m). Furthermore, the pressure sensitivity of this hydrogel material (with a calculated sensitivity of 0.17 kPa-1) is superior to the sensors based on conventional PAAm hydrogels [62], and other materials.
To overcome the issues related to rigid electrodes and complex electrode configuration in the fabrication of current touch panels, Kim et al. demonstrated a hydrogel-based ionic touch panel [53]. As an ionic conductor, a strip of PAAm hydrogel including LiCl is attached to platinum electrodes on both sides, forming a one-dimensional (1D) ionic touch strip (Figure 2n). When a finger makes contact with the hydrogel strip, current flows from both ends of the strip towards the touch position. The currents I1 and I2 were measured by ammeters A1 and A2 respectively (Figure 2o). With the touch point moving from left to right, I1 decreases linearly while I2 increases linearly (Figure 2p), however, their sum remains constant. Notably, stretching the gel strip (Figure 2p(ii)) leads to an expansion in the strip’s area, resulting in an increase in its parasitic capacitance. Consequently, both the touch-induced current and the baseline current will rise compared to the non-stretched states. Based on the sensing principle of 1D touch strip, a 2D hydrogel touch panel (Figure 2q) with a 2D surface capacitive touch sensing capability was constructed. Figure 2r depicts the schematic design of the touch panel, which is attached to the arm by a VHB film with 1mm thickness. The hydrogel material is completely transparent, with a 98% transmission of visible light, and can be operated at over 1000% strain. The subject can comfortably wear this touch panel for various human-machine interfacing tasks, such as writing text (Figure 2s) and playing piano (Figure 2t).
Most hydrogel materials suffer from dehydration problems. To eliminate this issue, Lei et al. report a new adaptive polyionic elastomer via a rational molecular design [54]. The polyionic elastomers are obtained by one-step polymerization of the cationic monomer DMAEA-Q (methyl chloride quaternized N, N-dimethylaminoethyl acrylate) in the presence of linear polyanionic PAA. Such polyionic elastomers possess unique advantages (such as autonomous self-healing, and 3D printing capabilities) when compared to stretchable silicone [53], self-healing elastomers [63], ionic conductive hydrogels [64]. Based on this polyionic elastomer, a polyionic skin with an integrated iontronic sensor was designed and fabricated based on 3D printing technology (Figure 2u). This polyionic skin possess various characteristics (such as transparency, mechanically flexibility, and self-adherent ability), and importantly, it exhibits better mechanical adaptation than other electronic skin in the detection of strain, pressure, touch, humidity, and temperature (Figure 2v-w).
2.2. Touch sensors based on self-healing materials
Human skin has an impressive ability to restore its diverse sensing functionalities thanks to its self-repairing capabilities [64,68]. In recent years, researchers aim to create bionic electronic skin with similar self-healing characteristics. A hot research topic is to find skin-like materials with reproducible self-healing capabilities, as well as mechanical and thermal sensing abilities. One technical approach to creating self-healing sensors is to combine self-healing polymer substrates with functionalized inorganic nanomaterials. For example, polyurethane can be mixed with MXene to achieve excellent self-healing and conducting capabilities [42]. Alternatively, researchers are also exploring new self-healing mechanisms in flexible materials to improve the recovery efficiency of flexible touch sensors. For instance, a novel type of self-healing thermoplastic elastomer (PBPUU) for underwater use was created by Khatib and colleagues using terminal hydroxy polybutadiene (HTPB), isophorone diisocyanate (IPDI), and 4-aminophenyl disulfide (APDS) [69].
Many flexible conductive composite materials can be used to fabricate touch sensors, but it is challenging to incorporate self-healing functions into these materials and sensors. Tee, B. C. et al. demonstrated a reproducible, room temperature self-healing electronic sensor skin made from a composite material consisting of supramolecular organic polymers and embedded nickel nanostructured particles [65]. The composite is composed of a supramolecular polymer hydrogen-bonded network with a glass transition temperature (Tg) below room temperature. The composite contains micro-nickel (Ni) particles that are chemically compatible with the polymer (Figure 3a). The composite offers good mechanical flexibility and tunable electrical conductivity, enabling the initial conductivity to be recovered with over 90% efficiency after rupturing. The mechanical properties can be fully restored after approximately 10 minutes, and the sensors can reliably detect the changes in pressure and limb positions (Figure 3b-c).
Figure 3.
Construction of flexible touch sensors based on self-healing materials. a) Schematic diagram showing the interaction between oligomer chains and the Ni particles in the developed supramolecular polymers. b) Schematic circuit and picture showing of the touch sensors attached on a wooden mannequin. c) Pictures showing that the LED intensity can be enhanced as tactile pressure increases. (Reprinted with permission from Ref. [65], Copyright 2012, Nat Nanotechnol) d) Schematic demonstrating the Fe(III)-PDCA complexation. e) Photograph showing a plastic rod poking the stretched active-matrix transistor array. f, g) Simulation result of f) Normalized on-current and g) strain distribution by poking the array. (Reprinted with permission from Ref. [66], Copyright 2019, Science) h) Schematic illustration of the AiFoam material created by replicating the somatosensory innervation system of human skin. (Reprinted with permission from Ref. [67], Copyright 2020, Nat Commun) i) Schematic illustration showing the self-healing mechanism in the tunable GLASSES material based on highly reversible ion–dipole interactions. j) Schematic showing a conformable pressure sensor on a spherical “lunar” surface. (Reprinted with permission from Ref. [63], Copyright 2019, Nature Electronics).
Figure 3.
Construction of flexible touch sensors based on self-healing materials. a) Schematic diagram showing the interaction between oligomer chains and the Ni particles in the developed supramolecular polymers. b) Schematic circuit and picture showing of the touch sensors attached on a wooden mannequin. c) Pictures showing that the LED intensity can be enhanced as tactile pressure increases. (Reprinted with permission from Ref. [65], Copyright 2012, Nat Nanotechnol) d) Schematic demonstrating the Fe(III)-PDCA complexation. e) Photograph showing a plastic rod poking the stretched active-matrix transistor array. f, g) Simulation result of f) Normalized on-current and g) strain distribution by poking the array. (Reprinted with permission from Ref. [66], Copyright 2019, Science) h) Schematic illustration of the AiFoam material created by replicating the somatosensory innervation system of human skin. (Reprinted with permission from Ref. [67], Copyright 2020, Nat Commun) i) Schematic illustration showing the self-healing mechanism in the tunable GLASSES material based on highly reversible ion–dipole interactions. j) Schematic showing a conformable pressure sensor on a spherical “lunar” surface. (Reprinted with permission from Ref. [63], Copyright 2019, Nature Electronics).
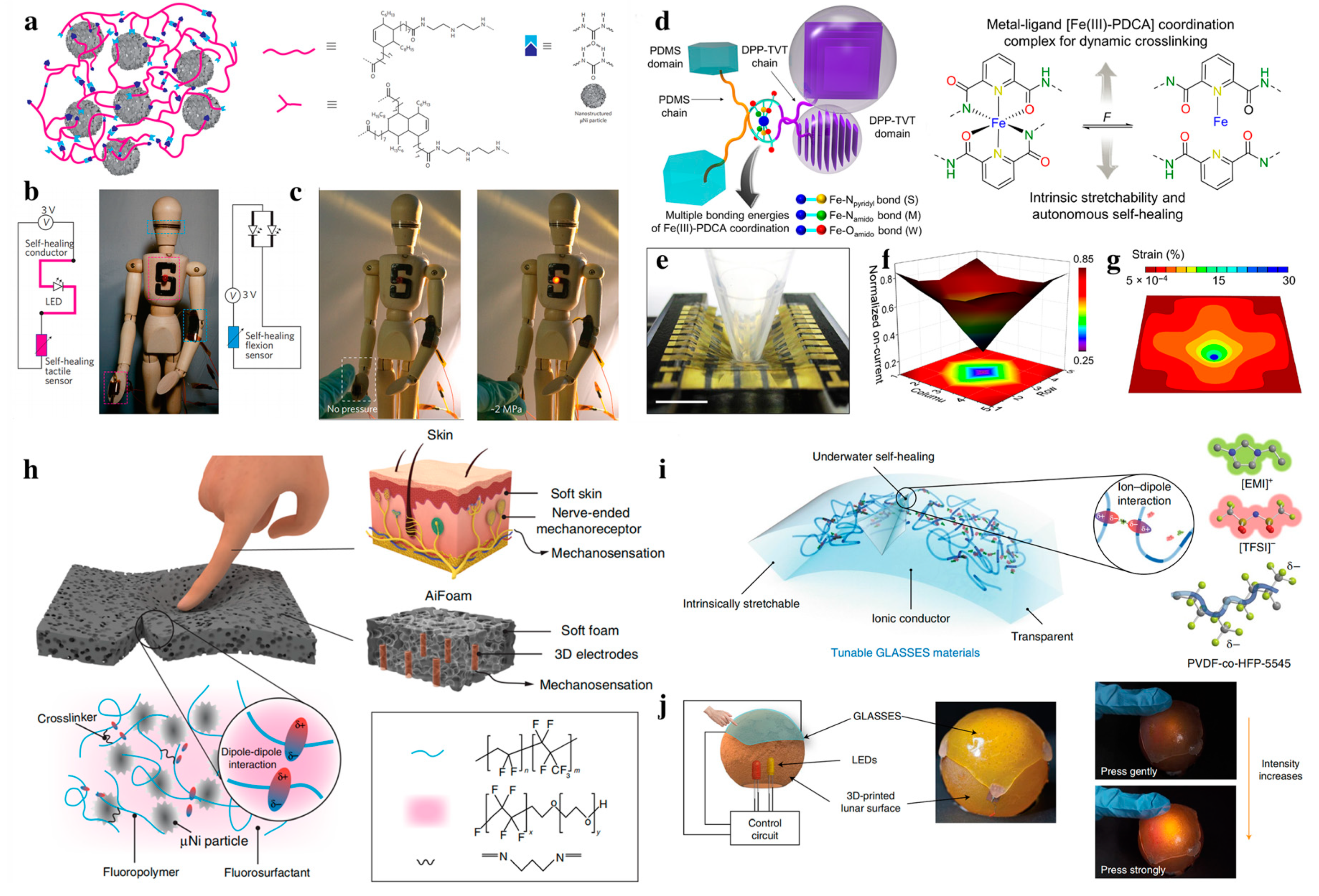
In addition to conductive composite materials, Oh et al. developed a new kind of semiconducting materials with room-temperature self-healing capability and mechanical stretchability [66]. For the fabrication of the semiconducting material, poly(3,6-di(thiophen-2-yl) diketopyrrolo [3,4-c] pyrrole- 1,4-dione-alt-1,2-dithienylethene) with 10 mol% 2,6-pyridinedicarboxamine moieties (DPP-TVT-PDCA) was employed because of its good charge carrier mobility. PDCA units were incorporated into the semiconducting material, which can bind well to the insulating and stretchable poly(dimethylsiloxane-alt-2,6-pyridinedicarbozamine) (PDMS-PDCA) polymer. The self-repairing capability of this material originates from the dynamic cross-linking of PDMS and DPP through Fe (III)-PDCA complexation. Moreover, the Fe (III)-PDCA coordination has multiple dynamic bonds of dissimilar strengths, which promotes the intrinsic tensile and self-repairing ability of dynamic cross-linking (Figure 3d). The sensing capability of the active-matrix transistor sensor arrays fabricated using this novel self-healing material was verified using a finite element method. The method was employed to evaluate the distribution of applied strain with a plastic tip (Figure 3e-g).
In addition to rigid self-healing touch sensors, by enclosing three-dimensional electrodes in a self-healing foam material, Guo et al. suggested a low-modulus biomimetic artificially innervated porous foam. [67]. To mimic the somatosensory innervation system in human skin, they used 3D wire electrodes as the “nerves”. The foam material is synthesized by a one-step self-foaming process and comprises a low-modulus elastomer composed of cross-linked polymer chains with 1,3-diaminopropane (DAP) and surfactant molecules, along with micro-nickel particles [54]. The surfactant can be trapped in the polymer matrix by the dipole-dipole interactions between the polymer chains and the surfactant molecules, which enables the foam material to self-heal under mild heating condition (Figure 3h). Modulation of the conductive metal particles’ concentration in the material as allows to construct a novel kind of touch sensors with both capacitive and piezoresistive sensing modalities.
To extend the application scenarios in both dry and wet environments, Cao et al. stated a transparent, skin-like material inspired by jellyfish which has the ability to repair itself autonomously regardless of dry and wet conditions [63]. This is in contrast to previous approaches by using hydrogen bonding and metal-ligand coordination to create self-healing materials (Figure 3i). This material contains a stretchable fluorocarbon elastomer with a high chain dipole moment and fluorine-rich ionic liquids called GLASSES. Due to its reversible ion-dipole interaction, the material provides rapid and reproducible self-repairing capability in acidic or alkaline environments. The resultant material also exhibits an ionic conductivity of up to 10-3 S cm-1 and can withstand up to 2000% of strain. A conformal pressure sensor was created by placing a piece of GLASSES on top of a 3D-printed “moon” surface. The LED light’s brightness fluctuates between distinct touch zones and its intensity changes in response to various touch stimulations (Figure 3j), demonstrating prospective using in water-based soft robots and waterproof human-machine interfaces.
2.3. Touch sensors based on other bionic materials
In addition to hydrogels and self-healing materials, other bionic materials with intriguing properties or functionalities could be employed to construct novel flexible touch sensors. For example, the materials with ionic channel like properties can be used construct highly sensitive touch sensors [33]. Natural human skin can be used as the sensing layer for fabricating sensitive capacitive touch sensors [70]. Light-emitting materials can be used to mimic the color changing behaviors of chameleons [27,38]. In addition, bioinspired temperature-sensing films with thermally regulated ionic mobility can be used to create biomimetic touch sensors [36]. These aforementioned bioinspired materials greatly expand the scope and application scenarios of wearable touch sensors.
Biological materials have continuously been a source of innovativeness for researchers in developing synthetic materials or devices that can mimic the unique functions of biological cells. Recently, Amoli et al. proposed a synthetic multicellular hybrid ion pump (SMHIP) materials inspired by the properties of biological multicellular structures [33]. The material was designed to imitate the ion pump behaviors using [EMIM+] [TFSI-] ion pairs that are assembled in situ on the surface of silica microspheres. In the proposed synthetic multicellular membrane, the [EMIM+] [TFSI-] ion pairs were bound to the surface of the silica microstructure that was embedded in TPU matrix (Figure 4a). The SMHIP films feature invertible pumping of ions under external stimuli, and a double electric layer (EDL) was observed at the IL-SiO2-TPU/electrode interface (Figure 4b-c). The reversible movement of ions was primarily due to the breakage and recurrence of [TFSI-]-silica H-bonds and the [EMIM+] cation’s π-π stacking interactions. Finally, an ion mechanoreceptor skin was prepared using this SMHIP materials. Such ion mechanoreceptor skin is highly sensitive (5.77-48.1 kPa-1) over a broad range of pressures (0-135 kPa). The mechanical sensitivity of this bioinspired mechanoreceptor even surpasses the pressure sensing ability of natural skin mechanoreceptors, such as Merkel cells and Meissner’s corpuscles [71].
Figure 4.
Flexible touch sensors based on other bionic materials. a) Design schematic of the SMHIP made of ionic liquids ([EMIM+] [TFSI−]), silica, and TPU. b-c) Schematic illustrating the working principle of bioinspired ionic mechanoreceptor skin before and after applying mechanical stimulations. Inset: The amplified view of artificial mechanoreceptor’s plasma membrane under deformation. (Reprinted with permission from Ref. [33], Copyright 2019, Nat Commun) d) Photograph of the SEMS with an arm laminated with a sensing electrode (SE) and a counter electrode (CE). e) Schematic of the SEMS’s layout after being affixed to the skin. f) A 3D schematic illustration of the SEMS-based smart glove. g, h) Capacitance mapping of the smart glove when the subject hold g) a balloon and h) a beaker. (Reprinted with permission from Ref. [70], Copyright 2021, Nat Commun) i) Schematic structure of the PSM device. j) Schematics showing the picture acquisition and processing system, exhibiting the the single-point dynamic pressure recording and 2D planar pressure mapping method. k) Demonstrations of using PSM devices to record the signing habits of four signees. (Reprinted with permission from Ref. [38], Copyright 2015, Adv Mater) l) Temperature-response characteristics of different artificial skins. m) Picture showing the pectin films with good flexibility. n-o) Molecular working mechanism of pit membrane in rattlesnake and the cross-linked pectin films. p) Comparison in response behaviors of pectin film-based temperature sensors with pit membranes. (Reprinted with permission from Ref. [36], Copyright 2017, Science Robotics).
Figure 4.
Flexible touch sensors based on other bionic materials. a) Design schematic of the SMHIP made of ionic liquids ([EMIM+] [TFSI−]), silica, and TPU. b-c) Schematic illustrating the working principle of bioinspired ionic mechanoreceptor skin before and after applying mechanical stimulations. Inset: The amplified view of artificial mechanoreceptor’s plasma membrane under deformation. (Reprinted with permission from Ref. [33], Copyright 2019, Nat Commun) d) Photograph of the SEMS with an arm laminated with a sensing electrode (SE) and a counter electrode (CE). e) Schematic of the SEMS’s layout after being affixed to the skin. f) A 3D schematic illustration of the SEMS-based smart glove. g, h) Capacitance mapping of the smart glove when the subject hold g) a balloon and h) a beaker. (Reprinted with permission from Ref. [70], Copyright 2021, Nat Commun) i) Schematic structure of the PSM device. j) Schematics showing the picture acquisition and processing system, exhibiting the the single-point dynamic pressure recording and 2D planar pressure mapping method. k) Demonstrations of using PSM devices to record the signing habits of four signees. (Reprinted with permission from Ref. [38], Copyright 2015, Adv Mater) l) Temperature-response characteristics of different artificial skins. m) Picture showing the pectin films with good flexibility. n-o) Molecular working mechanism of pit membrane in rattlesnake and the cross-linked pectin films. p) Comparison in response behaviors of pectin film-based temperature sensors with pit membranes. (Reprinted with permission from Ref. [36], Copyright 2017, Science Robotics).
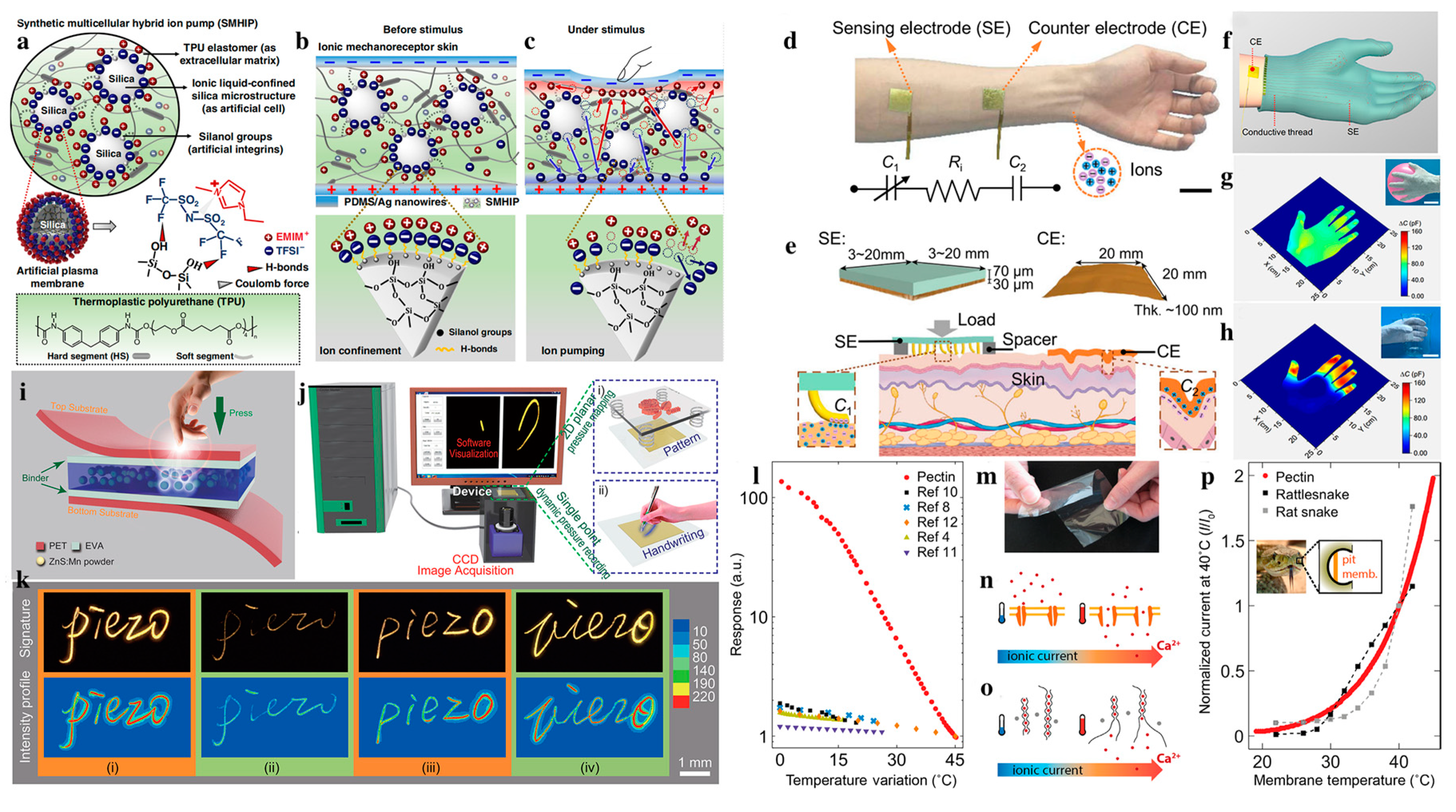
In addition to synthesize artificial materials, nature materials (e.g., the human skin, etc.) can be directly used to fabricate touch sensors. As an example, Zhu and colleagues have developed a skin-electrode mechanosensing structure (SEMS) that uses the ion transport properties in living systems, like human skin tissue [70]. The SEMS sensor consists of a sensing electrode (SE) with a microstructured surface and a compliant counter electrode (CE) (Figure 4d). Applying pressure to the SE changes the contact area between the micro-pillar structure and the skin surface, thus creating a capacitor between CE and SE with a much higher capacitance change than traditional capacitor-based touch sensors (Figure 4e). The SEMS sensor has a simpler structure than conventional touch sensors and does not require synthetic ionic gels or hydrogels. Additionally, a full fabric SEMS-based smart glove with good pressure mapping capability at millimeter spatial resolution was demonstrated (Figure 4f). The glove can be used to grip a soft compressible balloon, producing pressure distribution that is adequately uniform throughout the palm. (Figure 4g). In addition, holding a hard microphone with the glove produces a strong signal amplitude on the fingers and a weak signal on the palm (Figure 4h). The stability and simplicity of this SEMS sensor deliver a promising future for healthcare and human-machine interaction applications.
The allochroic behaviors of chameleons also inspired the design and fabrication optical flexible touch sensors that convert mechanical force in the color or brightness changes. Piezoelectric photonic effect, a bidirectional coupling effect between piezoelectric and photoexcitation properties, could be used to construct light-emitting sensors and electronic skins [72]. The piezoelectric photonic effect can cause a mechanoluminescence (ML) process, which converts mechanical stress into visible light emission. For instance, Wang et al. reported on an organic mechanoluminescent luminescent progenitor (TPE-2-Th and TPE-3-Th), which, when combined with the presence of aggregation-induced emission, can produce very bright ML light (dark blue), even in daylight [27]. Due to its weak non-covalent bonding, the material has a relatively stable packing mode in the crystalline state, which can be easily achieved by simple heat treatment for recoverable ML emission. Based on the ML processes and the related sensing devices, the relationship between pressure and ML intensity is able to be recognized successfully. This kind of ML devices can be a promising candidate in constructing future touch sensing devices for communication, information storage, and healthcare.
Apart from organic materials, inorganic ZnS:Mn particles (ZMP) is another ML material. ZMP can convert mechanical stress into visible light emission in tens of milliseconds [73]. Wang et al developed a wafer-scale flexible pressure sensor matrix (PSM) using ZnS:Mn particles (ZMP) as an intermediate mechanoluminescent material, which is sandwiched by two transparent polymer layers (Figure 4i) [38]. Piezoelectric ZnS induces a polarized charge under pressure stimulation, which promotes electron decapitation, leading to energy release and excitation of Mn2+ ions. With the excited ions returned to the ground state, yellow visible light emits. This operational technique enables the prompt observation of visible light emission in response to local force or pressure applied to the device. By utilizing specialized picture capture and processing technology, the device enables the recording of single-point dynamic pressure signatures as well as the generation of two-dimensional (2D) pressure maps (Figure 4j). The PSM device can collect signatures more securely by recording the signer’s handwriting graphics and signature habits (Figure 4k).
Nature touch sensing process does not only include mechanical sensation, but also involves thermal sensation. In addition to mimic the mechanical sensing functionality, temperature sensing is also highly required [74]. Many cold-blooded animals such as venomous snakes, have pit membranes that are highly sensitive and responsive to locating warm-blooded prey at a distance. Inspired by the snake pit membranes, Giacomo et al. imitated the sensing mechanism of the pit membranes using a novel artificial pectin temperature sensing membrane [36]. The bioinspired temperature-sensing pectin membranes exhibit superior comprehensive performance compared with other flexible temperature-sensing membranes (Figure 4l-m) [36]. The main reason for the high-performance of the pectin membranes is the ingenious mimicry of TRP receptors (Figure 4n) by using Ca2+ current regulation similar to that of pit membranes (Figure 4o). The resultant bioinspired pectin membranes exhibit the same sensing performance as snake pit membranes (Figure 4p) over a wide temperature range. This bioinspired temperature-sensing material can be used as an integrated layer to fabricate an artificial skin platform to improve the device’s temperature sensitivity.
3. Bioinspired structures for construction of flexible touch sensors
Natural selection has played a vital role in the evolution of various biological micro- and nano-structures that endow living creatures with exceptional sensing capabilities that are essential for survival in complex environments. Taking inspiration from nature, bionic structures have inspired the design of novel touch sensors and also play an important role in the improvement of the sensor performance. Bionic structures via mimicking the biological structures found in nature can be employed to design the whole structure of the sensors or to design the major functional parts of the sensing devices (e.g. the active sensing layer). In recent years, bioinspired structural designs, including hierarchical structure [41,75,76], porous structure [77], cracked structure [78], interlocked structure [79], and pyramid structure [80] have been introduced into flexible touch sensors to improve their sensitivity to mechanical vibration, pressure, wind speed, sound pressure, and human pulse. In general, these structures can be divided into three categories: biomimetic plant structures, biomimetic animal structures, and bionic human structures. The unique structural properties of animal body, hair and plant roots, leaves, flowers and fruits, as well as the human skin and bone body can be imitated to fabricate with special materials to create highly sensitive flexible touch sensors.
3.1. Biomimetic plant structures
In nature, most of the plants have evolved a variety of unique structures in order to resist the gnawing of insects and the trampling of animals. Furthermore, these structures can allow plants to receive sunlight, attract insects to disperse pollen, or help disperse seeds further afield. Inspired by these structures, researchers have developed a variety of bionic plant inspired touch sensors with enhanced performance. For example, leaves, seeds, flowers and pollen of plants have topological surfaces rich in biological hierarchical structures [83,84]. Highly-sensitive pressure sensing layers are suitable for using these natural structures as soft templates. Specifically, Epipremnum aureum leaf [85], Calathea zebrine leaf [43], lotus leaf [86] and rose petal [87] can be used as biological templates for the manufacture of low-cost and wearable tactile sensors.
Leaves, flowers, seeds and pollen are the most common parts of plants. They are important organs that help plants survive and are often used as templates for fabricating sensing microstructures. For instance, to make flexible ionic skins, a dielectric layer can be created from a biomimetic micro-structured ionic gel (MlG) with homogeneous cone-like surface microstructures [43]. The average surface height of MIG film is ~25 , and the intercone distance is 34 , which can effectively replace the micropyramids fabricated through complex photolithographic processes and anisotropic etching. The bioinspired MIG film could be sandwiched by two flexible electrodes to form a capacitive touch sensing skin. Figure 5a shows the Calathea zebrine leaves and the structures of the flexible MIG-based skin. The microstructures on the surface of the ionic gel were fabricated using a low-cost soft lithography method [88]. The Calathea zebrine leaf template was first used for the first molding, and then the ionic gel solution was casted onto the template for the second molding. An ion gel film formed after peeling off features an microcone array resembling the surface of leaves and is used as an active dielectric layer. Figure 5b shows the SEM image of the second template. From the random statistical distribution, the average diameter of the holes is approximately 35 . As shown in Figure 5c, uniform microcones were replicated after two molding processes. Such MIG-based skin has high tactile sensitivity, exhibiting promising application in human-machine interaction and health monitoring.
Figure 5.
Bionic touch sensors based on the special structures of plants. a) A flexible sensor made with a MlG dielectric layer. b-c) SEM pictures of the molding templates. (Reprinted with permission from Ref. [43], Copyright 2018, Adv Mater) d) Schematic representation of the rose petal-shaped template. f) Schematic illustration of the pressure sensor. e-g) SEM images of the PPy/PDMS stamps. (Reprinted with permission from Ref. [81], Copyright 2020, Adv Mater) h) The organizational structure of sunflower. i) SEM images showing the top electrode layer with a pyramid-shaped spiral grid. j) Response characteristics of pyramidal orthogonal and spiral grid arrays. k) Lateral view of the electronic skin with a spiral grid. (Reprinted with permission from Ref. [41], Copyright 2018, Science Robotics) l) Conceptual illustration of flexible touch sensors based on an interlocking geometry with encapsulated SFP microcapsules. m-n) SEM images of SFP microcapsules and MWCNT/SFP microcapsules, respectively. o) SEM image of SFP-containing 3D composite film. (Reprinted with permission from Ref. [82], Copyright 2017, Nano Energy).
Figure 5.
Bionic touch sensors based on the special structures of plants. a) A flexible sensor made with a MlG dielectric layer. b-c) SEM pictures of the molding templates. (Reprinted with permission from Ref. [43], Copyright 2018, Adv Mater) d) Schematic representation of the rose petal-shaped template. f) Schematic illustration of the pressure sensor. e-g) SEM images of the PPy/PDMS stamps. (Reprinted with permission from Ref. [81], Copyright 2020, Adv Mater) h) The organizational structure of sunflower. i) SEM images showing the top electrode layer with a pyramid-shaped spiral grid. j) Response characteristics of pyramidal orthogonal and spiral grid arrays. k) Lateral view of the electronic skin with a spiral grid. (Reprinted with permission from Ref. [41], Copyright 2018, Science Robotics) l) Conceptual illustration of flexible touch sensors based on an interlocking geometry with encapsulated SFP microcapsules. m-n) SEM images of SFP microcapsules and MWCNT/SFP microcapsules, respectively. o) SEM image of SFP-containing 3D composite film. (Reprinted with permission from Ref. [82], Copyright 2017, Nano Energy).
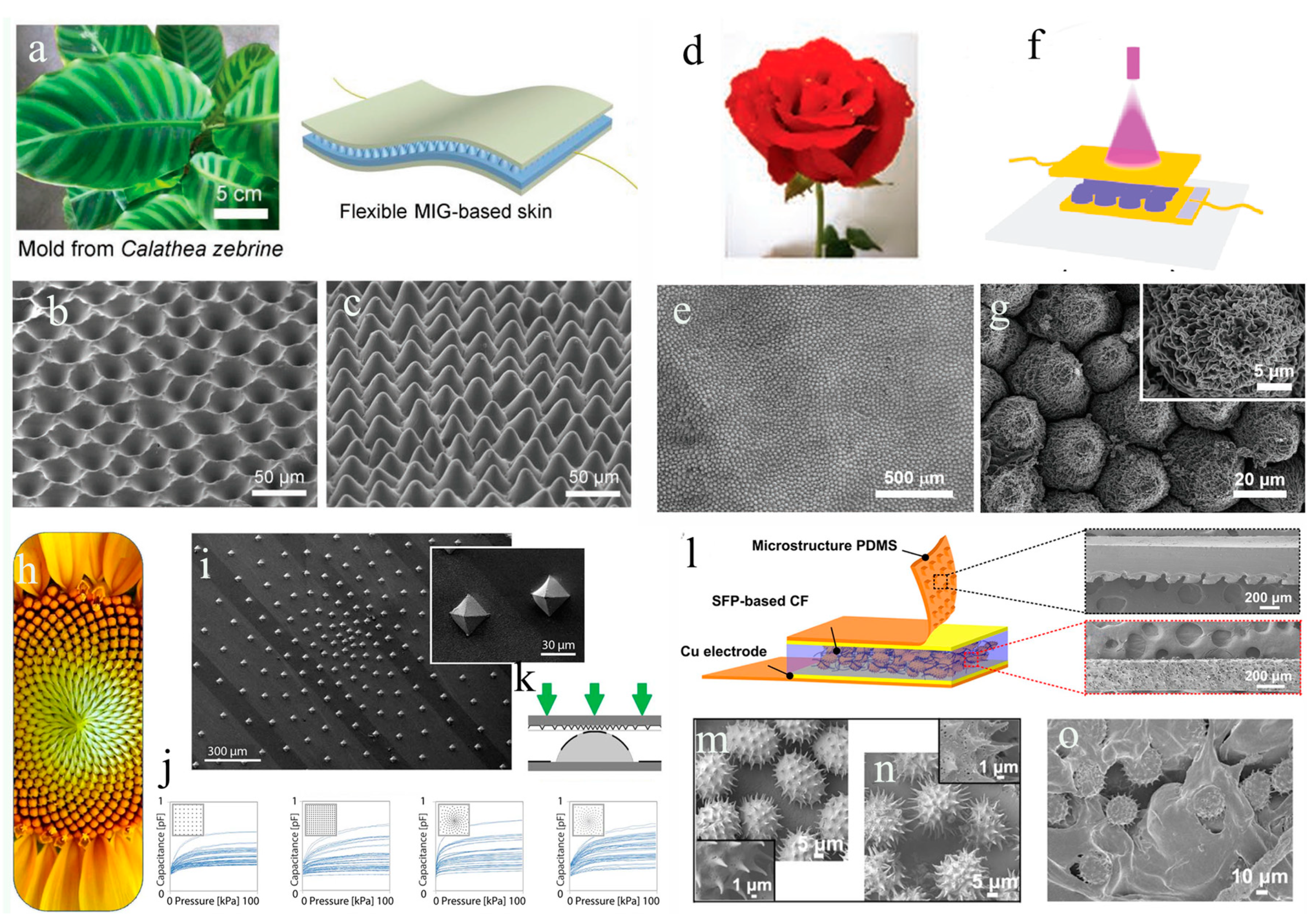
The flowers of many plants have very special structures. For example, the rose petals consists of multiple hierarchical structures [89,90]. The hierarchical structures of the rose petals combined with the surface folds can be used as a natural structure template for constructing flexible touch sensors. Yu et al. create multiscale hierarchical PDMS stamps with active layers of nano-wrinkled PPy using a rose petal template and a surface wrinkling pattern [81]. The PDMS stamp structures were made by using a rose petal as a biotemplate, as shown in Figure 5d. Then, PPy film was applied to the duplicated PDMS stamp using oxidative polymerization, followed by self-wrinkling processing of the PPy layer. The PPy/PDMS stamps with multiscale hierarchical morphologies were used to enhance the sensing capabilities of the piezoresistive touch sensors. The biomimetic PPy/PDMS stamps shown in Figure 5e are composed of multi-scale surface structures, including millimeter veins, micro-nipples, nanofolds, and nano-wrinkles. The nanofolds are aligned along the direction of longitude and were Uniformly distributed in the surface of every micropapilla (Figure 5g). As shown in Figure 5e, g, the nanowrinkled PPy film was formed on the nanofolds of the PDMS stamp [91]. The multi-scale hierarchical structure brings excellent pressure sensing performances: as shown in Figure 5f, a high sensitivity of 70 kPa-1 at 0.5 kPa, an low detection limit of 0.88 Pa and a fast response time of 30 ms [81]. These characteristics can be attributed to the rose petal templated millimeter/micro/nano multiscale structures combined with the surface wrinkling patterns.
Plants spread their seeds in different ways, and the shape and arrangement of their seeds have inspired the design of touch sensors. Boutry and colleagues report a biomimetic electronic skin [41]. The electronic skin consists of a set of capacitors and is made of orthogonally positioned electrodes on the top and bottom of carbon nanotube (CNT) embedded in a polyurethane (PU) matrix. An intermediate thin dielectric film was used as the electrical insulation layer of the capacitors. A pyramidal microstructure was designed as the top electrode layer of the electronic skin, featuring a foliated helice arrangement with multiple helices running clockwise and counterclockwise simultaneously, which was inspired by the head of a sunflower [92] (Figure 5h,k). These microstructures allowed the PU to bend elastically and reversibly in response to external pressure, with increased sensitivity [93]. Figure 5j displays the response characteristics of the biomimetic e-skin. Five-by-five capacitor sensor arrays are separated into orthogonal and spiral pyramid grids. The picture shows that the spiral grids are significantly superior than orthogonal grids.
Inspired by the structural feature of pollen-based microcapsules, Wang et al. describe an e-skin sensor made by adding natural capsules to a composite film made of PDMS [82]. The general design idea of the e-skin device based on sunflower pollen (SFP) is shown in Figure 5l. Figure 5m-o illustrates the fabrication of the electronic skin sensor. Through functionalization and coating treatment, the treated SFP microcapsules were encapsulated into the composite matrix, forming a 3D conductive network. Figure 5o confirms that the composite film containing the SFP in the conductive microcapsules showed a porous network and close crosslinking sites. This biomimetic design proved to be highly efficient in pressure detection, with a low detection threshold of 56.36 kPa-1 in dynamic and static.
3.2. Biomimetic animal structures
In nature, many animals live in darkness, cramped, muddy, and other extreme environments. They can perceive their environment through their unique sensing organs with special structures to sense danger and access nutrients. Their environmental adaptation strategy can be imitated to fabricate high-performance sensors with similar biomimicking structures to perceive external stimulations, e.g., touch, pressure, strain, vibration, and so on [95]. For example, fishes with lateral lines [96] and pinnipeds and rodents with hairy whiskers [97] can pick up different signals by their probe rod. In addition, the skin of some animals is composed of hierarchical structures, which can be used as soft templates to fabricate pressure sensing microstructure. For example, shark skin is coated in small and tooth-like scales that are ribbed along the longitudinal grooves [98]. Gecko skin comprises a complex micro- and nano-hierarchical structure [99,100]. Inspired by the unique structure of these animals, unique bioinspired sensors with intriguing properties can be developed.
For example, spiders can sense vibrations in their environment owing to slit organs with a crack-like structure [101]. Especially, the slit geometry of these organs responds well to tiny external force variations, featuring ultrahigh mechanical sensitivity [102]. Figure 6a and b provide a schematic of the spider’s slit organ. Inspired by the spider’s slit organs, Kang et al. developed a kind of highly sensitive strain sensor based on nanoscale crack junctions [46]. Figure 6c depicts a simplified drawing of the nanoscale crack sensor. Such a bioinspired crack-structured sensor demonstrates extraordinarily high sensitivity to physiological signals and vibrations from the outside world. The crack gap of this sensor widens with strain, as seen in Figure 6d and e, and even when subjected to no strain, there exists a minuscule gap (approximately 5 nm) between the adjacent crack edges, indicating that not all the fracture edges are in total contact each other. A sensor network of 64 pixels with diameters of 5 cm×5 cm was built (Figure 6g) to show the device’s capacity to detect minute mechanical vibrations. A piezoelectric vibrator was put on the blue-boxed region of Figure 6g as a vibration source, and a piece of PDMS was placed on the red-boxed region to impart a static pressure to the sensor matrix.
Figure 6.
Flexible touch sensors inspired by structures of insects and animals. a-c) Illustrations demonstrating a spider’s sensitive organs at its legs for detecting external stresses and vibrations (black arrows). The leg joint between the metatarsal and tarsal bones is the position where the sensory organs are located. d-e) SEM images and Finite-Element modelling results of the zip-like crack under different strains. f) Change in resistance of the sensor under different strains. g) Picture showing a 8×8 array of the crack strain sensor. (Reprinted with permission from Ref. [46], Copyright 2014, Nature) h) Schematic illustration showing a rat’s whisker sensory system and the local schematic representation of the whisker mechanoreceptor. i) Schematic representation of the bionic structure of the BWMR. j-l) Response behaviors of BWMR to weak perturbations, such as drizzle (j), breeze (k), and insect crawling (l). (Reprinted with permission from Ref. [94], Copyright 2021, Adv Mater).
Figure 6.
Flexible touch sensors inspired by structures of insects and animals. a-c) Illustrations demonstrating a spider’s sensitive organs at its legs for detecting external stresses and vibrations (black arrows). The leg joint between the metatarsal and tarsal bones is the position where the sensory organs are located. d-e) SEM images and Finite-Element modelling results of the zip-like crack under different strains. f) Change in resistance of the sensor under different strains. g) Picture showing a 8×8 array of the crack strain sensor. (Reprinted with permission from Ref. [46], Copyright 2014, Nature) h) Schematic illustration showing a rat’s whisker sensory system and the local schematic representation of the whisker mechanoreceptor. i) Schematic representation of the bionic structure of the BWMR. j-l) Response behaviors of BWMR to weak perturbations, such as drizzle (j), breeze (k), and insect crawling (l). (Reprinted with permission from Ref. [94], Copyright 2021, Adv Mater).
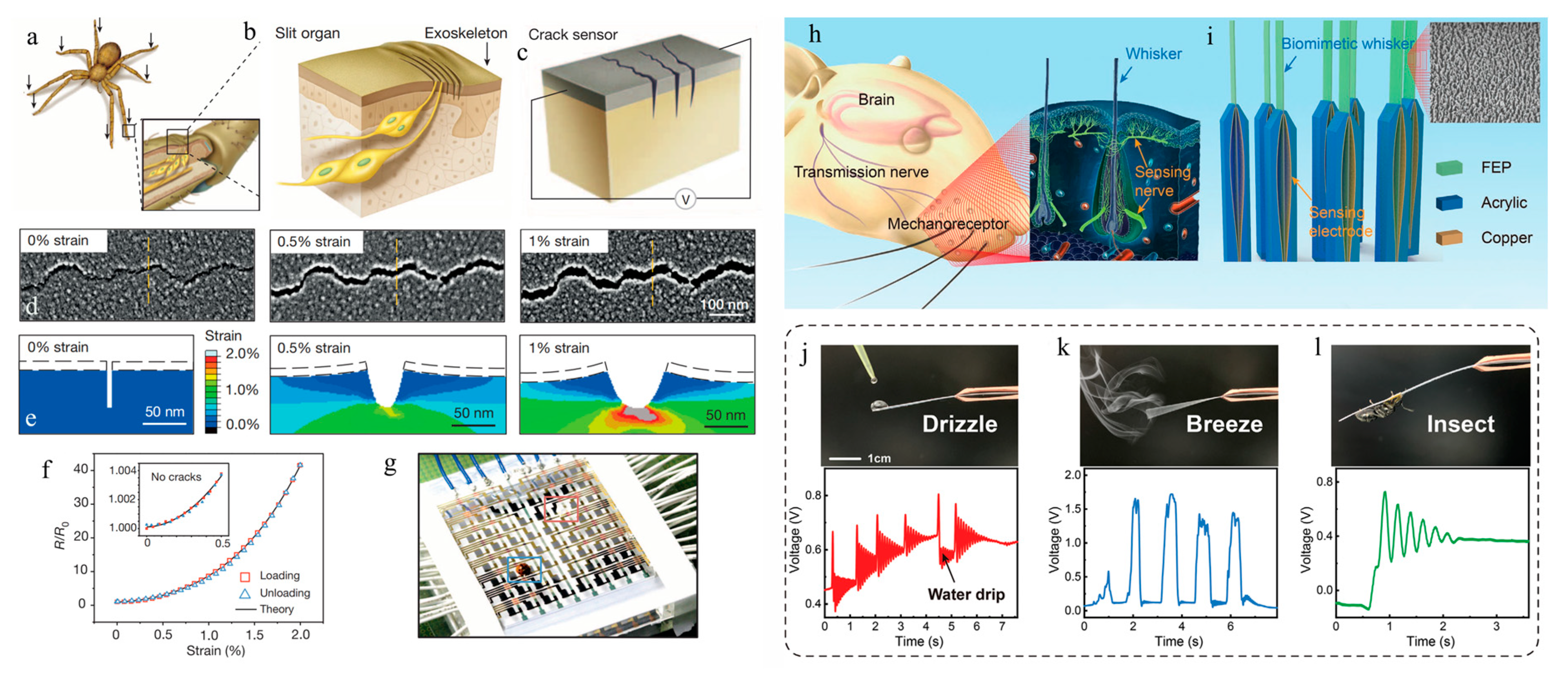
In addition to insects, mammals also have unique structures that can inspire the design of artificial touch sensors. Mice and other rodents may readily move around in dark by using their tactile system, which is made up of hairy whiskers and mechanoreceptors (Figure 6h). The leverage effect endow the mice with a sensitive tactile perception functionality [103]. Inspired by the sensing principle of mice’ whiskers, An et al. designed a bendable biomimetic whisker mechanoreceptor (BWMR) for tactile perception [94]. The sensory nerves used to track the biomimetic whiskers’ deformation are two metal electrodes coated on a biomimetic hair follicle (Figure 6i). The potential equilibrium between the two electrodes is disrupted when the whisker swings because it causes a free charge transfer between them. The sign and magnitude of the transmitted charge, respectively, may be used to determine the direction and amplitude of the stimulations. The BWMR can differentiate a minuscule force of 1.129 thanks to the leverage effect, and the performance may be further enhanced by lengthening the whisker. The BWMR sensor’s high mechanical sensitivity makes it an excellent tool for detecting little mechanical disturbances in the surroundings (Figure 6j-l).
3.3. Bionic human structures
Similar to the creatures in nature, the human body also have unique structures or geometries, which play an extremely important role in the hearing, vision, touch, smell and taste functions. Research on somatosensory systems of the human body has provided many inspirations for the design and fabrication of touch sensors and artificial electronic skins (e-skins). Much effort has been made to mimic the structural properties and geometry characteristics of human hand, such as fingerprint structure [105], spinosum structure [106], foot structure [34] and the hierarchy of the fingertip [104].
The epidermal-dermal junction’s intermediate ridges have been proven capable to improve the tactile perception of mechanoreceptors in human tactile systems [107]. It is known that intermediate ridges with the shape of interlocked microstructures exist between the epidermis and dermis, as shown in Figure 7a. Inspired by the interlocked epidermal-dermal ridges in human skin, Park et al. explored a kind of stretchable electronic skins with interlocked microdome structures (Figure 7a) [45]. The electronic skin was fabricated based on conductive composite elastomer films with surficial hexagonal microdome arrays. The conductive film with the micro-dome pattern is shown in Figure 7b. The sensor was first subjected to a normal force followed by a known shear force for testing the normal- and shear-force sensing characteristics (Figure 7c). When the normal and shear forces are applied, the surface of the microdomes in the interlocking structure was immediately deformed, which increased the contact area between the microdomes and decreased contact resistance. An electronic skin with 3×3 sensing pixel arrays is shown in Figure 7d. The electronic skin displayed several resolvable feedbacks when a finger was loaded onto the devices in various orientations (Figure 7d), which demonstrate the accurate perception of the direction and strength of the touch force.
Figure 7.
Flexible touch sensors inspired by the structures in human body. a) Schematic of human skin structure with interlocked epidermal-dermal layers. b) Schematic of an interlocked microdome array used for fabricating highly sensitive touch sensor. c) Schematic showing the deformation of the microdomes under stepwise application of normal and shear forces. d) Schematic diagram of the electronic skin for detecting different pressing directions of the finger: left (L), right(R), up(U), down(D). (Reprinted with permission from Ref. [45], Copyright 2014, Acs Nano) e) Picture and schematic illustration of human fingerprints. f) Illustration and SEM images of fingerprint-inspired u-TENGs. (Reprinted with permission from Ref. [39], Copyright 2022, Nano Energy) g) Anatomical model of the human foot with arch structure. h) Structural scheme of the fabricated pressure sensor. i) Sensitivity of JGF-based and FGF-based pressure sensors. j) Characteristic peaks of pulse waveforms measured by the JGF-based pressure sensors. (Reprinted with permission from Ref. [34], Copyright 2018, Advanced Electronic Materials) k) Illustration showing the anatomical structure of the fingers in human body with different compositions. l) Finger-inspired rigid-soft hybrid piezoelectric tactile sensor. m) Deformation modes and working principles of the tactile sensors made from different piezoelectric sensing structures. n) Photograph of a RSHTS array with 3×3 sensing units. o) Comparison in sensitivity of the hybrid piezoelectric tactile sensor with other existing piezoelectric tactile sensors. (Reprinted with permission from Ref. [104], Copyright 2022, Nature Communications).
Figure 7.
Flexible touch sensors inspired by the structures in human body. a) Schematic of human skin structure with interlocked epidermal-dermal layers. b) Schematic of an interlocked microdome array used for fabricating highly sensitive touch sensor. c) Schematic showing the deformation of the microdomes under stepwise application of normal and shear forces. d) Schematic diagram of the electronic skin for detecting different pressing directions of the finger: left (L), right(R), up(U), down(D). (Reprinted with permission from Ref. [45], Copyright 2014, Acs Nano) e) Picture and schematic illustration of human fingerprints. f) Illustration and SEM images of fingerprint-inspired u-TENGs. (Reprinted with permission from Ref. [39], Copyright 2022, Nano Energy) g) Anatomical model of the human foot with arch structure. h) Structural scheme of the fabricated pressure sensor. i) Sensitivity of JGF-based and FGF-based pressure sensors. j) Characteristic peaks of pulse waveforms measured by the JGF-based pressure sensors. (Reprinted with permission from Ref. [34], Copyright 2018, Advanced Electronic Materials) k) Illustration showing the anatomical structure of the fingers in human body with different compositions. l) Finger-inspired rigid-soft hybrid piezoelectric tactile sensor. m) Deformation modes and working principles of the tactile sensors made from different piezoelectric sensing structures. n) Photograph of a RSHTS array with 3×3 sensing units. o) Comparison in sensitivity of the hybrid piezoelectric tactile sensor with other existing piezoelectric tactile sensors. (Reprinted with permission from Ref. [104], Copyright 2022, Nature Communications).
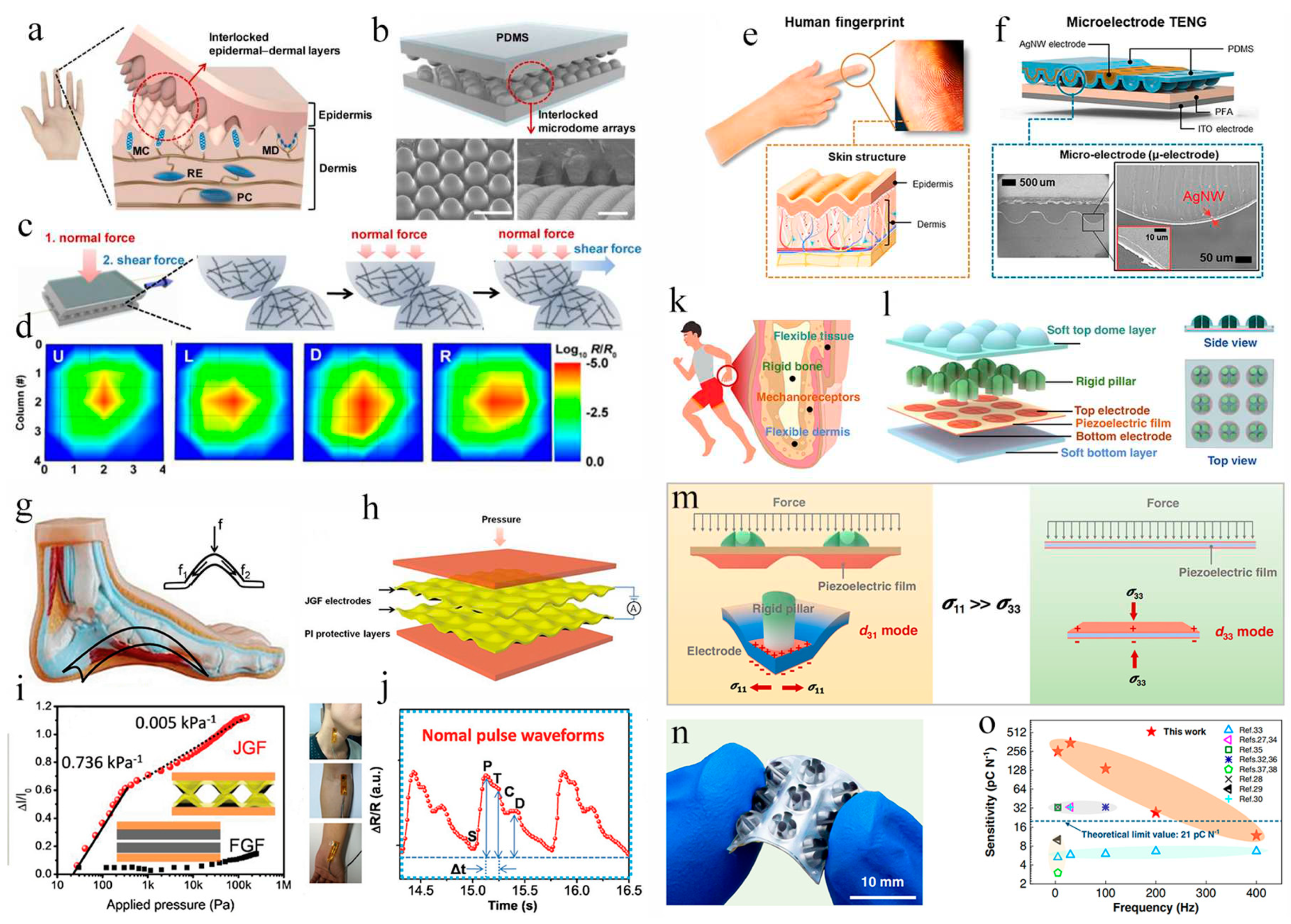
Human fingers are highly sensitive to touch stimulations, where the special fingerprints play an important role. As shown in Figure 7e, along the wavy patterns in the fingerprint, the finger skin consists of layers of epidermis and dermis. The living cells that make up the dermal layer are electrically conductive, but the dead cells that make up the epidermal layer are insulating. Inspired by fingerprint anatomy, Lee and colleagues design a geometrically asymmetric triboelectric nanogenerator (TENG) with paired electrodes with a microelectrode (u-electrode) on a microstructured TENG (u-TENG) [39]. The geometrically asymmetric paired electrodes mimic the wavy patterns of the outermost structure of the fingerprint. The u-TENG is made up of a conformal u-electrode and microstructured dielectric material (Figure 7f). The TENG has a high pressure sensitivity as well as dependable and durable pressure sensing capability due to the u-electrode. In particular, the arterial pulse and acoustic vibrations can be detected by the pressure sensors based on u-TENGs. The sensors based on u-TENGs could be utilized for both voice control and vascular monitoring.
In human feet, the foot’s arches serve as a natural cushioning structure that can withstand significant impact and protect our bodies from harm. Inspired by the arch structure of the foot (Figure 7g), Song and colleagues create a wearable piezoresistive-type pressure sensor using a novel Janus graphene film (JGF) with a consistent arch-shaped convex-concave structure on both surfaces (Figure 7h) [34]. Due to the distinct arch structures, JGF-based pressure sensors have a wide detecting range since they can maintain high effective stress with little strain. The sensor’s sensitivity is shown in Figure 7i. The FGF-based (microarch-free graphene film) pressure sensor was also created to verify the mechanism, and it displayed a desirable response even at a high pressure. The JGF-based pressure sensors may be utilized to monitor the pulse wave in addition to detecting excessive pressure (Figure 7i, j). As shown in Figure 7j, periodic pulse waveforms can be acquired with the JGF-based pressure sensors, which is in good consistence with the typical waveforms for the arteries [108]. And the usual waveforms, such as the beginning point (S), percussion wave (P), tidal wave (T), incisura wave (C), and diastolic wave (D), can be detected and are distinguishable, as shown in Figure 7j. In the meanwhile, it is possible to compute the age index (△I) and the time delay (△t) to monitor health conditions [109].
The human fingers consist of soft tissues and rigid bone. Inspired by the finger structures of humans (Figure 7k), Zhang and colleagues design a novel rigid-soft hybrid tactile sensor (RSHRS) (Figure 7l) [104]. For one sensory unit, a rigid-soft hybrid force-transmission layer is created by embedding stiff pillars into the soft elastomer matrix of the top dome-shaped layer. This structure design simulates a limb structure with bones embedded in soft muscles, which can effectively transmit external stimuli to internal structures. The sensory layer was made from piezoelectric film with five electrodes. Similar to human skin’s mechanoreceptors for detecting dynamic stimuli is this layer. The bottom layer, which supports the sensing layer, is constructed from supple material to resemble the skin dermis. As illustrated in Figure 7m, the force loading causes a bending deformation in the RSHTS piezoelectric sensing film, which generates trustworthy piezoelectric signals. The overall sensor array nonetheless has high flexibility even though the tactile sensor has a rigid-soft hybrid construction, as shown in Figure 7n. Along with adaptability, the RSHTS also showed extremely high sensitivity and a wide frequency spectrum (Figure 7o). Zhang et al. looked at the connection between the applied force and the sensor’s output charge at various frequencies. As shown in Figure 7o, for higher frequencies (200-600 Hz), the sensitivity of RSHTs reduce due to the viscoelastic properties.
4. Conclusion and outlook
Biogenic materials and structures possess unique properties and characteristics, which inspired the novel design and facile construction of next-generation touch sensors. Biomaterials exhibit extraordinary biological and physicochemical properties that align well with the human body and enable sensor functionalities beyond conventional materials. For instance, hydrogel materials can be designed with various unique properties by incorporating functional groups or nano-fillers into their dynamic network. Self-repairing materials, with outstanding self-healing ability and sensing properties, are ideal for constructing artificial electronic skin. Additionally, nature-inspired materials like ion pumping-like materials, mechanical light-emitting materials, and temperature sensing films expand the possibilities of wearable touch sensors. On the other hand, the unique structures of animals and plants in nature provide inspiration for the design of highly sensitive flexible sensors. Each organ of a plant has its own unique structure, which inspires the design of sensitive touching sensing structures. Animal skin and hair also have unique structures with excellent tactile perception capabilities. These structures can also be imitated to construct novel touch sensors with unconventional properties. These bioinspired touch sensors via mimicking the biogenic materials and structures exhibit desirable comprehensive performance for touch sensing, including good softness, high stretchability, self-healing capability, low detection limit, direction resolving capability, and so on. This review highlights the recent advances of using biomaterial and bionic structure to construct novel touch sensors, and also discusses the advantages of bioinspired sensors in comparison with conventional touch sensors.
Significant progress has been made in enhancing the functionality of wearable touch sensors, with successful demonstrations of various concepts, characteristics, and applications based on bionic materials and structures. However, pushing bionic touch sensors towards practical applications faces a number of challenges. The first challenge lies in the full mimicking of large-number and high-density tactile sensing units in natural human skin. Human skin possesses a high density of mechanical receptors, amounting to tens or even hundreds per square centimeter [110]. Despite that some touch sensors can be assembled into array, the number and density of these sensor arrays are far from that of natural human skin. Secondly, large-scale and cost-effective construction of bionic touch sensors presents another major issue. The complex material system and complicated fabrication processes greatly hinder the practical manufacturing and applications of bionic touch sensors. Addressing this challenge necessitates the development of easily available raw material and facile fabrication technologies, thus to enable large-scale, low-cost, and highly productive production. The third challenge could be the precise and reproducible preparation of bionic touch sensors. Touch sensing structures derived from biological templates (e.g., leaf [43], petal [89], and so on) often exhibit random, irregular, and unrepeatable geometrical characteristics. Therefore, the prepared bionic touch sensors based on such biological templates exhibit different response performance from batch to batch, compromising the reproducibility and reliability of the bionic touch sensors. The fourth issue is related to the stability and robustness of bionic touch sensors. Flexible touch sensors based on bionic materials and structures generally lack durability and succumb to damage under harsh environments (e.g., mechanical impact, stretching deformation, excessive cycling, drying of water, long term storage, etc.). For example, hydrogel -based touch sensors can gradually dehydrate, resulting in the variation of their touch sensing behaviors. Despite the aforementioned challenges, biogenic materials and structures provide a wealth of theoretical and technical inspirations for flexible touch sensors. In the future, it is anticipated that an increasing number of new paradigms of bioinspired touch sensors will be proposed and demonstrated with the aforementioned issues well resolved.
References
- Chen, S.; Jiang, K.; Lou, Z.; Chen, D.; Shen, G. Recent Developments in Graphene-Based Tactile Sensors and E-Skins. Advanced Materials Technologies 2018, 3, 1700248. [CrossRef]
- Lu, N.; Kim, D.-H. Flexible and Stretchable Electronics Paving the Way for Soft Robotics. Soft Robotics 2014, 1, 53-62. [CrossRef]
- Cha, Y.; Seo, J.; Kim, J.-S.; Park, J.-M. Human–computer interface glove using flexible piezoelectric sensors. Smart Materials and Structures 2017, 26, 057002. [CrossRef]
- Peng, X.; Dong, K.; Ye, C.; Jiang, Y.; Zhai, S.; Cheng, R.; Liu, D.; Gao, X.; Wang, J.; Wang, Z.L. A breathable, biodegradable, antibacterial, and self-powered electronic skin based on all-nanofiber triboelectric nanogenerators. Sci Adv 2020, 6, eaba9624. [CrossRef]
- Xiong, Y.; Shen, Y.; Tian, L.; Hu, Y.; Zhu, P.; Sun, R.; Wong, C.-P. A flexible, ultra-highly sensitive and stable capacitive pressure sensor with convex microarrays for motion and health monitoring. Nano Energy 2020, 70, 104436. [CrossRef]
- Khan, Y.; Ostfeld, A.E.; Lochner, C.M.; Pierre, A.; Arias, A.C. Monitoring of Vital Signs with Flexible and Wearable Medical Devices. Adv Mater 2016, 28, 4373-4395. [CrossRef]
- Tang, X.; Wu, C.; Gan, L.; Zhang, T.; Zhou, T.; Huang, J.; Wang, H.; Xie, C.; Zeng, D. Multilevel Microstructured Flexible Pressure Sensors with Ultrahigh Sensitivity and Ultrawide Pressure Range for Versatile Electronic Skins. Small 2019, 15, e1804559. [CrossRef]
- Xu, H.; Lv, Y.; Qiu, D.; Zhou, Y.; Zeng, H.; Chu, Y. An ultra-stretchable, highly sensitive and biocompatible capacitive strain sensor from an ionic nanocomposite for on-skin monitoring. Nanoscale 2019, 11, 1570-1578. [CrossRef]
- Majumder, S.; Mondal, T.; Deen, M.J. Wearable Sensors for Remote Health Monitoring. Sensors (Basel) 2017, 17. [CrossRef]
- Lee, Y.; Myoung, J.; Cho, S.; Park, J.; Kim, J.; Lee, H.; Lee, Y.; Lee, S.; Baig, C.; Ko, H. Bioinspired Gradient Conductivity and Stiffness for Ultrasensitive Electronic Skins. ACS Nano 2021, 15, 1795-1804. [CrossRef]
- He, Z.; Chen, W.; Liang, B.; Liu, C.; Yang, L.; Lu, D.; Mo, Z.; Zhu, H.; Tang, Z.; Gui, X. Capacitive Pressure Sensor with High Sensitivity and Fast Response to Dynamic Interaction Based on Graphene and Porous Nylon Networks. ACS Appl Mater Interfaces 2018, 10, 12816-12823. [CrossRef]
- Sharma, S.; Chhetry, A.; Zhang, S.; Yoon, H.; Park, C.; Kim, H.; Sharifuzzaman, M.; Hui, X.; Park, J.Y. Hydrogen-Bond-Triggered Hybrid Nanofibrous Membrane-Based Wearable Pressure Sensor with Ultrahigh Sensitivity over a Broad Pressure Range. ACS Nano 2021, 15, 4380-4393. [CrossRef]
- Chen, M.; Li, K.; Cheng, G.; He, K.; Li, W.; Zhang, D.; Li, W.; Feng, Y.; Wei, L.; Li, W.; et al. Touchpoint-Tailored Ultrasensitive Piezoresistive Pressure Sensors with a Broad Dynamic Response Range and Low Detection Limit. ACS Appl Mater Interfaces 2019, 11, 2551-2558. [CrossRef]
- Jiang, W.; Li, H.; Liu, Z.; Li, Z.; Tian, J.; Shi, B.; Zou, Y.; Ouyang, H.; Zhao, C.; Zhao, L.; et al. Fully Bioabsorbable Natural-Materials-Based Triboelectric Nanogenerators. Adv Mater 2018, 30, e1801895. [CrossRef]
- Elsayes, A.; Sharma, V.; Yiannacou, K.; Koivikko, A.; Rasheed, A.; Sariola, V. Plant-Based Biodegradable Capacitive Tactile Pressure Sensor Using Flexible and Transparent Leaf Skeletons as Electrodes and Flower Petal as Dielectric Layer. Advanced Sustainable Systems 2020, 4. [CrossRef]
- Chakraborty, P.; Guterman, T.; Adadi, N.; Yadid, M.; Brosh, T.; Adler-Abramovich, L.; Dvir, T.; Gazit, E. A Self-Healing, All-Organic, Conducting, Composite Peptide Hydrogel as Pressure Sensor and Electrogenic Cell Soft Substrate. ACS Nano 2019, 13, 163-175. [CrossRef]
- Ahmed, A.; Zhang, S.L.; Hassan, I.; Saadatnia, Z.; Zi, Y.; Zu, J.; Wang, Z.L. A washable, stretchable, and self-powered human-machine interfacing Triboelectric nanogenerator for wireless communications and soft robotics pressure sensor arrays. Extreme Mechanics Letters 2017, 13, 25-35. [CrossRef]
- Zhou, K.; Dai, K.; Liu, C.; Shen, C. Flexible conductive polymer composites for smart wearable strain sensors. SmartMat 2020, 1, e1010. [CrossRef]
- Liu, C.; Huang, N.; Xu, F.; Tong, J.; Chen, Z.; Gui, X.; Fu, Y.; Lao, C. 3D Printing Technologies for Flexible Tactile Sensors toward Wearable Electronics and Electronic Skin. Polymers (Basel) 2018, 10, 629. [CrossRef]
- Wang, Z.; Zhou, Z.; Wang, S.; Yao, X.; Han, X.; Cao, W.; Pu, J. An anti-freezing and strong wood-derived hydrogel for high-performance electronic skin and wearable sensing. Composites Part B: Engineering 2022, 239, 109954. [CrossRef]
- Wang, J.; Qian, S.; Yu, J.; Zhang, Q.; Yuan, Z.; Sang, S.; Zhou, X.; Sun, L. Flexible and Wearable PDMS-Based Triboelectric Nanogenerator for Self-Powered Tactile Sensing. Nanomaterials (Basel) 2019, 9, 1304. [CrossRef]
- Mahata, C.; Algadi, H.; Lee, J.; Kim, S.; Lee, T. Biomimetic-inspired micro-nano hierarchical structures for capacitive pressure sensor applications. Measurement 2020, 151, 107095. [CrossRef]
- Kim, D.; Park, J.; Kim, Y.T. Core–Shell and Helical-Structured Cylindrical Triboelectric Nanogenerator for Wearable Energy Harvesting. ACS Applied Energy Materials 2019, 2, 1357-1362. [CrossRef]
- Cui, M.; Hou, T.; Tong, J.; Xin, Y.; Zhou, X.; Liang, W. Flexible Piezoelectric Tactile Sensor With Cilia-Inspired Structures Based on Electrospun PVDF/Fe3O4 Nanofibers. IEEE Sensors Journal 2022, 22, 24430-24438. [CrossRef]
- Wang, S.; Xiao, P.; Liang, Y.; Zhang, J.; Huang, Y.; Wu, S.; Kuo, S.-W.; Chen, T. Network cracks-based wearable strain sensors for subtle and large strain detection of human motions. Journal of Materials Chemistry C 2018, 6, 5140-5147. [CrossRef]
- Deng, J.; Kuang, X.; Liu, R.; Ding, W.; Wang, A.C.; Lai, Y.C.; Dong, K.; Wen, Z.; Wang, Y.; Wang, L.; et al. Vitrimer Elastomer-Based Jigsaw Puzzle-Like Healable Triboelectric Nanogenerator for Self-Powered Wearable Electronics. Adv Mater 2018, 30, e1705918. [CrossRef]
- Wang, C.; Yu, Y.; Yuan, Y.; Ren, C.; Liao, Q.; Wang, J.; Chai, Z.; Li, Q.; Li, Z. Heartbeat-Sensing Mechanoluminescent Device Based on a Quantitative Relationship between Pressure and Emissive Intensity. Matter 2020, 2, 181-193. [CrossRef]
- Chen, S.; Wu, N.; Lin, S.; Duan, J.; Xu, Z.; Pan, Y.; Zhang, H.; Xu, Z.; Huang, L.; Hu, B.; et al. Hierarchical elastomer tuned self-powered pressure sensor for wearable multifunctional cardiovascular electronics. Nano Energy 2020, 70, 104460. [CrossRef]
- Wang, Y.; Wu, H.; Xu, L.; Zhang, H.; Yang, Y.; Wang, Z.L. Hierarchically patterned self-powered sensors for multifunctional tactile sensing. Sci Adv 2020, 6, eabb9083. [CrossRef]
- Qin, Y.; Zhang, X.; Zheng, A.; Xia, Q. Bioinspired Design of Hill-Ridge Architecture-Based Iontronic Sensor with High Sensibility and Piecewise Linearity. Advanced Materials Technologies 2021, 7. [CrossRef]
- Xia, S.; Zhang, Q.; Song, S.; Duan, L.; Gao, G. Bioinspired Dynamic Cross-Linking Hydrogel Sensors with Skin-like Strain and Pressure Sensing Behaviors. Chemistry of Materials 2019, 31, 9522-9531. [CrossRef]
- Song, S.; Zhang, C.; Li, W.; Wang, J.; Rao, P.; Wang, J.; Li, T.; Zhang, Y. Bioinspired engineering of gradient and hierarchical architecture into pressure sensors toward high sensitivity within ultra-broad working range. Nano Energy 2022, 100. [CrossRef]
- Amoli, V.; Kim, J.S.; Jee, E.; Chung, Y.S.; Kim, S.Y.; Koo, J.; Choi, H.; Kim, Y.; Kim, D.H. A bioinspired hydrogen bond-triggered ultrasensitive ionic mechanoreceptor skin. Nat Commun 2019, 10, 4019. [CrossRef]
- Song, Z.; Li, W.; Bao, Y.; Wang, W.; Liu, Z.; Han, F.; Han, D.; Niu, L. Bioinspired Microstructured Pressure Sensor Based on a Janus Graphene Film for Monitoring Vital Signs and Cardiovascular Assessment. Advanced Electronic Materials 2018, 4. [CrossRef]
- Gao, G.; Yang, F.; Zhou, F.; He, J.; Lu, W.; Xiao, P.; Yan, H.; Pan, C.; Chen, T.; Wang, Z.L. Bioinspired Self-Healing Human-Machine Interactive Touch Pad with Pressure-Sensitive Adhesiveness on Targeted Substrates. Adv Mater 2020, 32, e2004290. [CrossRef]
- Di Giacomo, R.; Bonanomi, L.; Costanza, V.; Maresca, B.; Daraio, C. Biomimetic temperature-sensing layer for artificial skins. Sci Robot 2017, 2, eaai9251. [CrossRef]
- Wei, P.; Chen, T.; Chen, G.; Liu, H.; Mugaanire, I.T.; Hou, K.; Zhu, M. Conductive Self-Healing Nanocomposite Hydrogel Skin Sensors with Antifreezing and Thermoresponsive Properties. ACS Appl Mater Interfaces 2020, 12, 3068-3079. [CrossRef]
- Wang, X.; Zhang, H.; Yu, R.; Dong, L.; Peng, D.; Zhang, A.; Zhang, Y.; Liu, H.; Pan, C.; Wang, Z.L. Dynamic pressure mapping of personalized handwriting by a flexible sensor matrix based on the mechanoluminescence process. Adv Mater 2015, 27, 2324-2331. [CrossRef]
- Lee, S.; Park, J.-W. Fingerprint-inspired triboelectric nanogenerator with a geometrically asymmetric electrode design for a self-powered dynamic pressure sensor. Nano Energy 2022, 101. [CrossRef]
- Li, T.; Luo, H.; Qin, L.; Wang, X.; Xiong, Z.; Ding, H.; Gu, Y.; Liu, Z.; Zhang, T. Flexible Capacitive Tactile Sensor Based on Micropatterned Dielectric Layer. Small 2016, 12, 5042-5048. [CrossRef]
- Boutry, C.M.; Negre, M.; Jorda, M.; Vardoulis, O.; Chortos, A.; Khatib, O.; Bao, Z. A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics. Sci Robot 2018, 3. [CrossRef]
- Yang, M.; Cheng, Y.; Yue, Y.; Chen, Y.; Gao, H.; Li, L.; Cai, B.; Liu, W.; Wang, Z.; Guo, H.; et al. High-Performance Flexible Pressure Sensor with a Self-Healing Function for Tactile Feedback. Adv Sci (Weinh) 2022, 9, e2200507. [CrossRef]
- Qiu, Z.; Wan, Y.; Zhou, W.; Yang, J.; Yang, J.; Huang, J.; Zhang, J.; Liu, Q.; Huang, S.; Bai, N.; et al. Ionic Skin with Biomimetic Dielectric Layer Templated from Calathea Zebrine Leaf. Advanced Functional Materials 2018, 28. [CrossRef]
- Pang, Q.; Wu, K.; Jiang, Z.; Yang, F.; Shi, Z.; Gao, H.; Zhang, C.; Hou, R.; Zhu, Y. Nanostructured ionic hydrogel with integrated conductivity, stretchability and thermal responsiveness for a high-performance strain and temperature sensor. Biomater Sci 2023, 11, 3603-3615. [CrossRef]
- Park, J.; Lee, Y.; Hong, J.; Lee, Y.; Ha, M.; Jung, Y.; Lim, H.; Kim, S.Y.; Ko, H. Tactile-direction-sensitive and stretchable electronic skins based on human-skin-inspired interlocked microstructures. ACS Nano 2014, 8, 12020-12029. [CrossRef]
- Kang, D.; Pikhitsa, P.V.; Choi, Y.W.; Lee, C.; Shin, S.S.; Piao, L.; Park, B.; Suh, K.Y.; Kim, T.I.; Choi, M. Ultrasensitive mechanical crack-based sensor inspired by the spider sensory system. Nature 2014, 516, 222-226. [CrossRef]
- Sun, F.; Liu, L.; Liu, T.; Wang, X.; Qi, Q.; Hang, Z.; Chen, K.; Xu, J.; Fu, J. Vascular smooth muscle-inspired architecture enables soft yet tough self-healing materials for durable capacitive strain-sensor. Nat Commun 2023, 14, 130. [CrossRef]
- Zhang, Y.; Ye, S.; Cao, L.; Lv, Z.; Ren, J.; Shao, Z.; Yao, Y.; Ling, S. Natural Silk Spinning-Inspired Meso-Assembly-Processing Engineering Strategy for Fabricating Soft Tissue-Mimicking Biomaterials. Advanced Functional Materials 2022, 32, 2200267. [CrossRef]
- Xu, S.; Liu, T.; Mu, Y.; Wang, Y.F.; Chi, Z.; Lo, C.C.; Liu, S.; Zhang, Y.; Lien, A.; Xu, J. An organic molecule with asymmetric structure exhibiting aggregation-induced emission, delayed fluorescence, and mechanoluminescence. Angew Chem Int Ed Engl 2015, 54, 874-878. [CrossRef]
- Brochu, A.B.; Craig, S.L.; Reichert, W.M. Self-healing biomaterials. J Biomed Mater Res A 2011, 96, 492-506. [CrossRef]
- Pu, X.; Liu, M.; Chen, X.; Sun, J.; Du, C.; Zhang, Y.; Zhai, J.; Hu, W.; Wang, Z.L. Ultrastretchable, transparent triboelectric nanogenerator as electronic skin for biomechanical energy harvesting and tactile sensing. Sci Adv 2017, 3, e1700015. [CrossRef]
- Lei, Z.; Wang, Q.; Sun, S.; Zhu, W.; Wu, P. A Bioinspired Mineral Hydrogel as a Self-Healable, Mechanically Adaptable Ionic Skin for Highly Sensitive Pressure Sensing. Adv Mater 2017, 29. [CrossRef]
- Kim, C.C.; Lee, H.H.; Oh, K.H.; Sun, J.Y. Highly stretchable, transparent ionic touch panel. Science 2016, 353, 682-687. [CrossRef]
- Lei, Z.; Wang, Q.; Wu, P. A multifunctional skin-like sensor based on a 3D printed thermo-responsive hydrogel. Materials Horizons 2017, 4, 694-700. [CrossRef]
- Xue, Z.; Song, H.; Rogers, J.A.; Zhang, Y.; Huang, Y. Mechanically-Guided Structural Designs in Stretchable Inorganic Electronics. Adv Mater 2020, 32, e1902254. [CrossRef]
- Zhao, F.; Shi, Y.; Pan, L.; Yu, G. Multifunctional Nanostructured Conductive Polymer Gels: Synthesis, Properties, and Applications. Acc Chem Res 2017, 50, 1734-1743. [CrossRef]
- Wang, Z.; Cong, Y.; Fu, J. Stretchable and tough conductive hydrogels for flexible pressure and strain sensors. J Mater Chem B 2020, 8, 3437-3459. [CrossRef]
- Caccavo, D.; Cascone, S.; Lamberti, G.; Barba, A.A. Hydrogels: experimental characterization and mathematical modelling of their mechanical and diffusive behaviour. Chem Soc Rev 2018, 47, 2357-2373. [CrossRef]
- Zhang, C.; Wu, B.; Zhou, Y.; Zhou, F.; Liu, W.; Wang, Z. Mussel-inspired hydrogels: from design principles to promising applications. Chem Soc Rev 2020, 49, 3605-3637. [CrossRef]
- Wang, Z.; Li, H.; Tang, Z.; Liu, Z.; Ruan, Z.; Ma, L.; Yang, Q.; Wang, D.; Zhi, C. Hydrogel Electrolytes for Flexible Aqueous Energy Storage Devices. Advanced Functional Materials 2018, 28, 1804560. [CrossRef]
- Sarwar, M.S.; Dobashi, Y.; Preston, C.; Wyss, J.K.; Mirabbasi, S.; Madden, J.D. Bend, stretch, and touch: Locating a finger on an actively deformed transparent sensor array. Sci Adv 2017, 3, e1602200. [CrossRef]
- Sun, J.Y.; Keplinger, C.; Whitesides, G.M.; Suo, Z. Ionic skin. Adv Mater 2014, 26, 7608-7614. [CrossRef]
- Cao, Y.; Tan, Y.J.; Li, S.; Lee, W.W.; Guo, H.; Cai, Y.; Wang, C.; Tee, B.C.K. Self-healing electronic skins for aquatic environments. Nature Electronics 2019, 2, 75-82. [CrossRef]
- Jin, H.; Huynh, T.P.; Haick, H. Self-Healable Sensors Based Nanoparticles for Detecting Physiological Markers via Skin and Breath: Toward Disease Prevention via Wearable Devices. Nano Lett 2016, 16, 4194-4202. [CrossRef]
- Tee, B.C.; Wang, C.; Allen, R.; Bao, Z. An electrically and mechanically self-healing composite with pressure- and flexion-sensitive properties for electronic skin applications. Nat Nanotechnol 2012, 7, 825-832. [CrossRef]
- Oh, J.Y.; Son, D.; Katsumata, T.; Lee, Y.; Kim, Y.; Lopez, J.; Wu, H.C.; Kang, J.; Park, J.; Gu, X.; et al. Stretchable self-healable semiconducting polymer film for active-matrix strain-sensing array. Sci Adv 2019, 5, eaav3097. [CrossRef]
- Guo, H.; Tan, Y.J.; Chen, G.; Wang, Z.; Susanto, G.J.; See, H.H.; Yang, Z.; Lim, Z.W.; Yang, L.; Tee, B.C.K. Artificially innervated self-healing foams as synthetic piezo-impedance sensor skins. Nat Commun 2020, 11, 5747. [CrossRef]
- Qi, M.; Yang, R.; Wang, Z.; Liu, Y.; Zhang, Q.; He, B.; Li, K.; Yang, Q.; Wei, L.; Pan, C.; et al. Bioinspired Self-healing Soft Electronics. Advanced Functional Materials 2023, 33, 2214479. [CrossRef]
- Khatib, M.; Zohar, O.; Saliba, W.; Haick, H. A Multifunctional Electronic Skin Empowered with Damage Mapping and Autonomic Acceleration of Self-Healing in Designated Locations. Adv Mater 2020, 32, e2000246. [CrossRef]
- Zhu, P.; Du, H.; Hou, X.; Lu, P.; Wang, L.; Huang, J.; Bai, N.; Wu, Z.; Fang, N.X.; Guo, C.F. Skin-electrode iontronic interface for mechanosensing. Nat Commun 2021, 12, 4731. [CrossRef]
- Jin, M.L.; Park, S.; Lee, Y.; Lee, J.H.; Chung, J.; Kim, J.S.; Kim, J.S.; Kim, S.Y.; Jee, E.; Kim, D.W.; et al. An Ultrasensitive, Visco-Poroelastic Artificial Mechanotransducer Skin Inspired by Piezo2 Protein in Mammalian Merkel Cells. Adv Mater 2017, 29, 1605973. [CrossRef]
- Wu, W.; Wang, Z.L. Piezotronics and piezo-phototronics for adaptive electronics and optoelectronics. Nature Reviews Materials 2016, 1, 16031. [CrossRef]
- Bhargava, R.N.; Gallagher, D.; Hong, X.; Nurmikko, A. Optical properties of manganese-doped nanocrystals of ZnS. Phys Rev Lett 1994, 72, 416-419. [CrossRef]
- Webb, R.C.; Bonifas, A.P.; Behnaz, A.; Zhang, Y.; Yu, K.J.; Cheng, H.; Shi, M.; Bian, Z.; Liu, Z.; Kim, Y.S.; et al. Ultrathin conformal devices for precise and continuous thermal characterization of human skin. Nat Mater 2013, 12, 938-944. [CrossRef]
- Ha, M.; Lim, S.; Cho, S.; Lee, Y.; Na, S.; Baig, C.; Ko, H. Skin-Inspired Hierarchical Polymer Architectures with Gradient Stiffness for Spacer-Free, Ultrathin, and Highly Sensitive Triboelectric Sensors. ACS Nano 2018, 12, 3964-3974. [CrossRef]
- Li, X.; Fan, Y.J.; Li, H.Y.; Cao, J.W.; Xiao, Y.C.; Wang, Y.; Liang, F.; Wang, H.L.; Jiang, Y.; Wang, Z.L.; et al. Ultracomfortable Hierarchical Nanonetwork for Highly Sensitive Pressure Sensor. ACS Nano 2020, 14, 9605-9612. [CrossRef]
- Kang, S.; Lee, J.; Lee, S.; Kim, S.; Kim, J.-K.; Algadi, H.; Al-Sayari, S.; Kim, D.-E.; Kim, D.; Lee, T. Highly Sensitive Pressure Sensor Based on Bioinspired Porous Structure for Real-Time Tactile Sensing. Advanced Electronic Materials 2016, 2. [CrossRef]
- Guo, Y.; Guo, Z.; Zhong, M.; Wan, P.; Zhang, W.; Zhang, L. A Flexible Wearable Pressure Sensor with Bioinspired Microcrack and Interlocking for Full-Range Human-Machine Interfacing. Small 2018, 14, e1803018. [CrossRef]
- Wang, K.; Lou, Z.; Wang, L.; Zhao, L.; Zhao, S.; Wang, D.; Han, W.; Jiang, K.; Shen, G. Bioinspired Interlocked Structure-Induced High Deformability for Two-Dimensional Titanium Carbide (MXene)/Natural Microcapsule-Based Flexible Pressure Sensors. ACS Nano 2019, 13, 9139-9147. [CrossRef]
- Chou, H.H.; Nguyen, A.; Chortos, A.; To, J.W.; Lu, C.; Mei, J.; Kurosawa, T.; Bae, W.G.; Tok, J.B.; Bao, Z. A chameleon-inspired stretchable electronic skin with interactive colour changing controlled by tactile sensing. Nat Commun 2015, 6, 8011. [CrossRef]
- Yu, S.; Li, L.; Wang, J.; Liu, E.; Zhao, J.; Xu, F.; Cao, Y.; Lu, C. Light-Boosting Highly Sensitive Pressure Sensors Based on Bioinspired Multiscale Surface Structures. Advanced Functional Materials 2020, 30. [CrossRef]
- Wang, L.; Jackman, J.A.; Tan, E.-L.; Park, J.H.; Potroz, M.G.; Hwang, E.T.; Cho, N.-J. High-performance, flexible electronic skin sensor incorporating natural microcapsule actuators. Nano Energy 2017, 36, 38-45. [CrossRef]
- Barthlott, W.; Neinhuis, C. Purity of the sacred lotus, or escape from contamination in biological surfaces. Planta 1997, 202, 1-8. [CrossRef]
- Hunt, J.; Bhushan, B. Nanoscale biomimetics studies of Salvinia molesta for micropattern fabrication. J Colloid Interface Sci 2011, 363, 187-192. [CrossRef]
- Zhao, T.; Li, T.; Chen, L.; Yuan, L.; Li, X.; Zhang, J. Highly Sensitive Flexible Piezoresistive Pressure Sensor Developed Using Biomimetically Textured Porous Materials. ACS Appl Mater Interfaces 2019, 11, 29466-29473. [CrossRef]
- Shi, J.; Wang, L.; Dai, Z.; Zhao, L.; Du, M.; Li, H.; Fang, Y. Multiscale Hierarchical Design of a Flexible Piezoresistive Pressure Sensor with High Sensitivity and Wide Linearity Range. Small 2018, 14, e1800819. [CrossRef]
- Guo, R.; Yu, Y.; Zeng, J.; Liu, X.; Zhou, X.; Niu, L.; Gao, T.; Li, K.; Yang, Y.; Zhou, F.; et al. Biomimicking Topographic Elastomeric Petals (E-Petals) for Omnidirectional Stretchable and Printable Electronics. Adv Sci (Weinh) 2015, 2, 1400021. [CrossRef]
- Qin, D.; Xia, Y.; Whitesides, G.M. Soft lithography for micro- and nanoscale patterning. Nat Protoc 2010, 5, 491-502. [CrossRef]
- Choo, S.; Choi, H.-J.; Lee, H. Replication of rose-petal surface structure using UV-nanoimprint lithography. Mater Lett 2014, 121, 170-173. [CrossRef]
- Wei, Y.; Chen, S.; Lin, Y.; Yang, Z.; Liu, L. Cu–Ag core–shell nanowires for electronic skin with a petal molded microstructure. Journal of Materials Chemistry C 2015, 3, 9594-9602. [CrossRef]
- Yang, X.; Zhao, Y.; Xie, J.; Han, X.; Wang, J.; Zong, C.; Ji, H.; Zhao, J.; Jiang, S.; Cao, Y.; et al. Bioinspired Fabrication of Free-Standing Conducting Films with Hierarchical Surface Wrinkling Patterns. ACS Nano 2016, 10, 3801-3808. [CrossRef]
- Nisoli, C. Spiraling solitons: A continuum model for dynamical phyllotaxis of physical systems. Phys Rev E Stat Nonlin Soft Matter Phys 2009, 80, 026110. [CrossRef]
- Mannsfeld, S.C.; Tee, B.C.; Stoltenberg, R.M.; Chen, C.V.; Barman, S.; Muir, B.V.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat Mater 2010, 9, 859-864. [CrossRef]
- An, J.; Chen, P.; Wang, Z.; Berbille, A.; Pang, H.; Jiang, Y.; Jiang, T.; Wang, Z.L. Biomimetic Hairy Whiskers for Robotic Skin Tactility. Adv Mater 2021, 33, e2101891. [CrossRef]
- Pohlmann, K.; Grasso, F.W.; Breithaupt, T. Tracking wakes: the nocturnal predatory strategy of piscivorous catfish. Proc Natl Acad Sci U S A 2001, 98, 7371-7374. [CrossRef]
- Yang, Y.; Chen, J.; Engel, J.; Pandya, S.; Chen, N.; Tucker, C.; Coombs, S.; Jones, D.L.; Liu, C. Distant touch hydrodynamic imaging with an artificial lateral line. Proc Natl Acad Sci U S A 2006, 103, 18891-18895. [CrossRef]
- Severson, K.S.; Xu, D.; Yang, H.; O’Connor, D.H. Coding of whisker motion across the mouse face. Elife 2019, 8. [CrossRef]
- Bechert, D.W.; Bruse, M.; Hage, W.; Meyer, R. Fluid mechanics of biological surfaces and their technological application. Naturwissenschaften 2000, 87, 157-171. [CrossRef]
- Bhushan, B.; Jung, Y.C. Natural and biomimetic artificial surfaces for superhydrophobicity, self-cleaning, low adhesion, and drag reduction. Prog Mater Sci 2011, 56, 1-108. [CrossRef]
- Gao, H.; Wang, X.; Yao, H.; Gorb, S.; Arzt, E. Mechanics of hierarchical adhesion structures of geckos. Mech Mater 2005, 37, 275-285. [CrossRef]
- Fratzl, P.; Barth, F.G. Biomaterial systems for mechanosensing and actuation. Nature 2009, 462, 442-448. [CrossRef]
- Hossl, B.; Bohm, H.J.; Rammerstorfer, F.G.; Mullan, R.; Barth, F.G. Studying the deformation of arachnid slit sensilla by a fracture mechanical approach. J Biomech 2006, 39, 1761-1768. [CrossRef]
- Laboy-Juarez, K.J.; Langberg, T.; Ahn, S.; Feldman, D.E. Elementary motion sequence detectors in whisker somatosensory cortex. Nat Neurosci 2019, 22, 1438-1449. [CrossRef]
- Zhang, J.; Yao, H.; Mo, J.; Chen, S.; Xie, Y.; Ma, S.; Chen, R.; Luo, T.; Ling, W.; Qin, L.; et al. Finger-inspired rigid-soft hybrid tactile sensor with superior sensitivity at high frequency. Nat Commun 2022, 13, 5076. [CrossRef]
- Chen, H.; Song, Y.; Guo, H.; Miao, L.; Chen, X.; Su, Z.; Zhang, H. Hybrid porous micro structured finger skin inspired self-powered electronic skin system for pressure sensing and sliding detection. Nano Energy 2018, 51, 496-503. [CrossRef]
- Zhu, H.; Jin, Z.; Bai, H.; Cao, J.; Dong, X.; Zhong, Y.; Dai, S.; Cheng, G.; Yuan, N.; Ding, J. Flexible, high-sensitive and multifunctional wearable sensor based on the dual bioinspired spinosum microstructure of carbon nanotube/carbon black-coated polydimethylsiloxane film. Measurement 2023, 207. [CrossRef]
- Cauna, N. Nature and functions of the papillary ridges of the digital skin. Anat Rec 1954, 119, 449-468. [CrossRef]
- Li, R.X.; Ip, A.; Sanz-Miralles, E.; Konofagou, E.E. Noninvasive Evaluation of Varying Pulse Pressures in vivo Using Brachial Sphymomanometry, Applanation Tonometry, and Pulse Wave Ultrasound Manometry. Artery Res 2017, 18, 22-28. [CrossRef]
- Yang, T.; Jiang, X.; Zhong, Y.; Zhao, X.; Lin, S.; Li, J.; Li, X.; Xu, J.; Li, Z.; Zhu, H. A Wearable and Highly Sensitive Graphene Strain Sensor for Precise Home-Based Pulse Wave Monitoring. ACS Sens 2017, 2, 967-974. [CrossRef]
- Chortos, A.; Liu, J.; Bao, Z. Pursuing prosthetic electronic skin. Nat Mater 2016, 15, 937-950. [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



