
Submitted:
31 July 2023
Posted:
01 August 2023
You are already at the latest version
Abstract
In this paper we consider a failed cold standby systems and obtain some stochastic bounds on the
idle time of such systems. It is assumed that, at a time t the failure of a cold standby system
is observed, but the actual time of the failure is a time before t. The idle time of the inactive
cold standby system is measured as the time between the exact time of failure, which is a random
variable, and time t. We use the idle times of the components of the system to obtain lower and
upper bounds on the lifetime of the standby system to which they are assembled. We bring some
examples to show that the results and the conditions imposed to get them are achievable.
Keywords:
cold-standby systems
; reliability
; stochastic order
; likelihood ratio order
; inactivity time
MSC: 62N05, 90B25, 62E10, 65C20
1. Introduction and Preliminaries
The lifespan of cold standby systems can be described as longer than other types of backup systems because they are not actively operated and are therefore subject to less wear and tear. This can result in cost savings for organizations because they do not need to replace or upgrade the system as frequently. However, the life of the system can also be affected by factors such as the quality of the hardware and software used, maintenance practices, and frequency of use. Cold standby systems are commonly used in reliability to support critical systems and processes. Some applications of cold standby systems in reliability include:
1) Data backup and recovery: cold standby systems can be used to store backup data and ensure its availability in the event of a system failure or malfunction.
2) Emergency power supply: Cold standby systems can be used as a backup power supply in the event of a power failure or malfunction to ensure that critical systems remain operational.
3) Network redundancy: Cold standby systems can be used as network redundancy to ensure that critical network services remain available in the event of a network outage or failure.
4) Server redundancy: Cold standby systems can be used as server redundancy to ensure that critical applications and services remain available in the event of a server failure or defect.
5) Disaster recovery: Cold standby systems can be used as part of a disaster recovery plan to provide backup support for critical systems and processes in the event of a natural disaster or other catastrophic event.
Overall, cold standby systems are an important tool for ensuring the reliability and availability of critical systems and processes. They can help organizations minimize downtime and maintain continuity in the event of unexpected events. Cold-standby systems have recently attracted the attention of many researchers in the field of reliability enginerring (see, e.g., Wang and Ye [23], Ramezani Dobani et al. [19], Danjuma et al. [5], Malhotra et al. [16] and Lin et al. [15]).
In contrast to the residual life of a system, one of the aspects of engineering systems is their idle time. The idle time is also called the inactivity time or reversed residual lifetime. Stochastic properties of coherent systems, a large and well-known class of systems in reliability, in view of their idle time have been studied during the past decades (see, for instance, Bayramoglu and Ozkut [3], Zhang and Balakrishnan [24], Navarro et al. [17], Kayid et al. [10], Navarro and Calì [18], Salehi and Tavangar [20], Toomaj and Di Crescenzo [22], Amini-Seresht et al. [2], Guo et al. [7] and Kayid and Shrahili [11]).
Recently, Kayid and Alshehri [12] developed stochastic comparisons between the lifetime of a used cold standby system (which is still functioning) and sum of the residual lifetimes of the components in the system. Here in this paper we consider idle time of a failed cold standby system to obtain some lower/upper bound for it in terms of the idle time of the failed components in the system. As pointed out and clearly shown by Ahmad et al. [1], the results for the idle variable (the inactivity time) cannot be concluded from the similar results on the residual lifetime variable. This is the reason why we start our study in this paper. Another reason is that the properties that we obtain in this paper are quite different and cannot be acquired from the results in Kayid and Alshehri [12]. An interesting point is that in general the uncertainty in the past lifetime of an inactive coherent system is less than the uncertainty in the future lifetime and especially the remaining lifetime of a functioning coherent system. This is because the idle variable takes values at but the residual lifetime variable takes values at , so the former is obviously more predictable than the latter. Therefore, the problem of finding stochastic bounds on the idle time of a cold standby system have a complement role to refine our knowledge about the lifetime of the system.
In the continuing part of the paper several notations are used. Let be a random vector and denote and Consider a cold standby system comprising of n components. Firstly, one component begins to work and the residual components are standby and ready to lie in the system. Upon the failure of the first component, the components that are in queue in standby mode are replaced one by one until all components become inactive and, thus, the cold standby system fails. Suppose that represent the lifetimes of the n described components having cumulative distribution functions (CDF’s) . It will be assumed that are independent. The lifetime of the cold standby system is then identified as
The CDF of the lifetime of the cold standby system is
in which * stands for the convolution operator. It is acknowledged that when and , for are independent, then where is the probability density function (PDF) of , which is the CDF of the convolution of and , that is the CDF of . From (1), we can develop that
Suppose X denotes the life length of a lifetime organism. We assume that at the time t at which an inspection has been carried out, it is found that the organism is not alive or it is not working. This situation can be frequently encountered in different contexts, as there is no process to accurately determine the time point at which the organism failed, and maybe there will be signs by which it is realized that the organism has failed. There are many situations where the observation of events is postponed. The time t, thus, may be the first time at which a sign has observed. We will utilize the random variable (RV) which is well-defined for every for which . The RV is called the inactivity time of the organism (which has random lifetime X) at the time t. The RV has cdf
The associated sf of is obviously as
The pdf of is also derived as
There are two well-known reliability measures which are constructed using the RV namely, the reversed hazard rate (RHR) function, and the mean inactivity (MIT) time function. The RHR of a lifetime RV (), in view of (5,) is defined as
The MIT function of X, as the mathematical expectation of the RV is derived as
For the preliminary properties of the RHR function we refer the readers to Block et al. [4] and Finkelstein [6] and for initial aspects and properties of MIT functions one can see Kayid and Izadkhah [9] and Khan et al. [13].
Stochastic orders which have been utilized to compare probability distributions provide useful procedures to compare reliability systems. Two reputable and frequently used stochastic orders are adopted in this paper for making stochastic orders between idle times of inactive systems. The following definition is adopted from Shaked and Shanthikumar [21].
Definition 1.
Suppose that X and Y are two non-negative RVs with PDFs and , and RFs and , respectively. Then, we say X is smaller or equal than Y in the
(i) likelihood ratio order (denoted as ) if is increasing in .
(ii) usual stochastic order (denoted as ) if for all .
The two stochastic orders given in Definition 1 are in a relation with each other so that yields (see, for instance, Theorem 1.C.1 in Shaked and Shanthikumar [21]). In accordance with comparison between and for all according to the likelihood ratio order and the usual stochastic order, new classes of lifetime distributions are generated. In the sequel of the paper, the following classes are used.
Definition 2.
The RV X with PDF is said to have
(i) Increasing likelihood ratio property (denoted by ) whenever is log-concave in .
(ii) Decreasing reversed hazard rate (denoted by ) whenever is log-concave in .
For instance the exponential distribution, as a standard lifetime distribution, fulfils both and properties. The weibull distribution with shape parameter and scale parameter , with RF has and properties if . For further properties of the and the classes of lifetime distributions the readers are referred to Lai and Xie [14]. The following definition is due to Karlin [8].
Definition 3.
Let be a non-negative function defined for and . Then, is said to be totally positive of order 2 (denoted as ) in , provided that for all and for all
2. Main Results
The idle time of a cold-standby system with n components (one is active with random lifetime and the residual ones with random lifetimes are ready to function upon the failure of the active component) is characterized by the random variable
where t is the first time at which the failure of the system is observed.
In the following theorem, we derive a lower bound for the inactivity time of a standby system, in the sense of the usual stochastic order, in terms of the inactivity time of its components.
Theorem 1.
Let be independent and non-negative rvs such that are also independent. Then, for fixed ,
Proof.
We proceed and prove the theorem by the method of induction. Let and denote and , where is a fixed time. We show, firstly, that for all Since for every and , thus for all and also for all , we have . Hence, it is enough to show that holds true for all . This is also sufficient to claim that
For , we can get
where the first identity followed from equation (3), the second identity obtained by total probability formula and the fact that and are independent, and the third identity acquired after the change of variable . On the other hand,
in which the second equality is due to the total probability formula and that and are independent and the second equality obtained by using equations (4) and (5). Since, for one has thus,
Therefore, for all ,
Let us assume now that (7) holds for , that is
The lower bound in (7) in Theorem 1 can take negative values for some . If the lower bound is negative for a given , the result of Theorem 1 becomes trivial. However, in the following example we present a situation where (7) produces a meaningful lower bound for the MIT of a gamma distributed random lifetime.
Example 1.
Suppose that , an exponential distribution with mean . Then, has MIT
It is known that has gamma distribution with shape and scale λ. From Theorem 1, since the usual stochastic order implies the expectation order, thus we obtain a lower bound for the MIT of as follows:
We show that the obtained lower bound for the MIT of is non-negative. It is readily seen that , for all , if and only if, , for all . Since for all , thus for all . Therefore,
The following example clarifies another utilization of the result of Theorem 1.
Example 2.
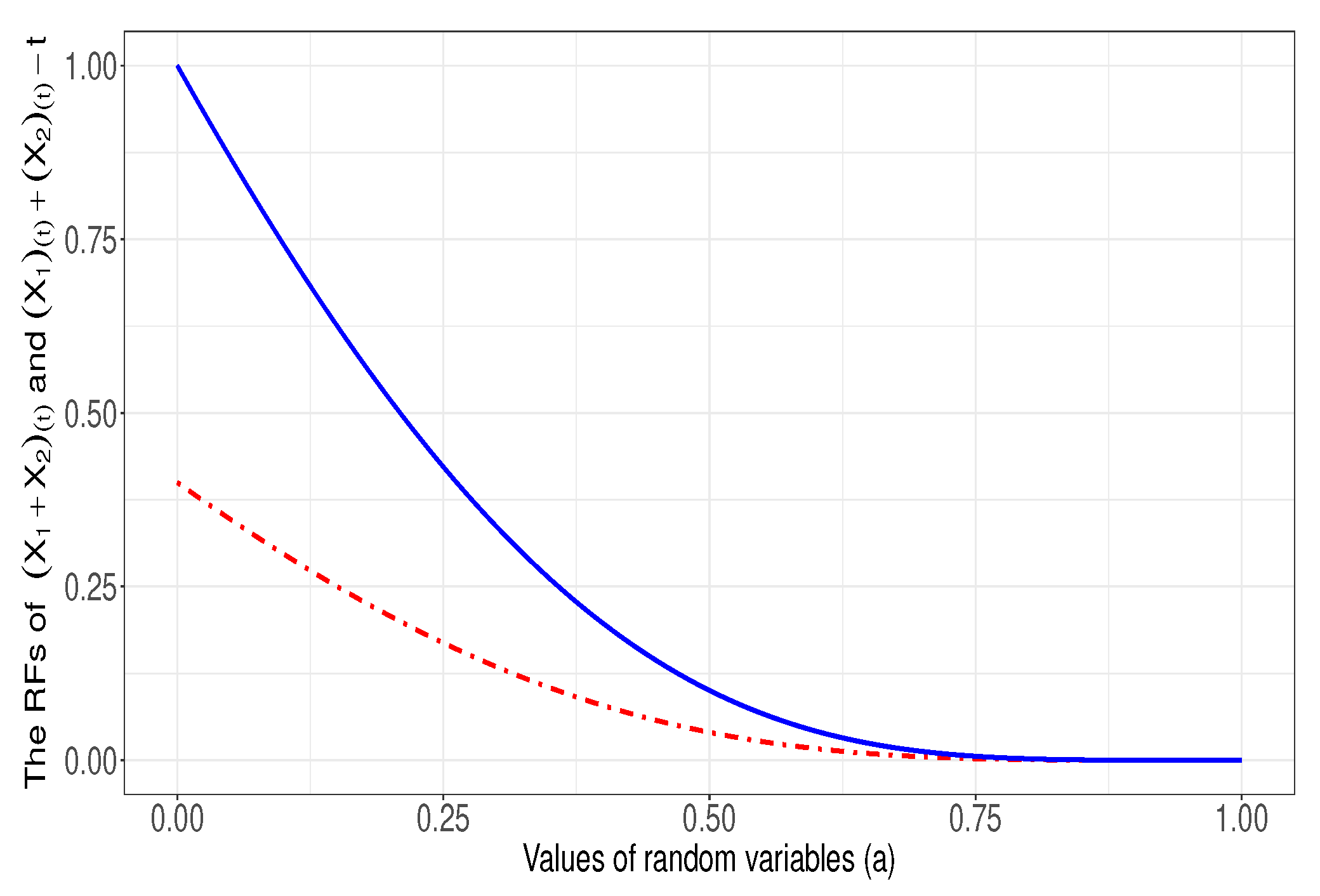
It is said that X has a gamma distribution with shape parameter and the scale parameter λ and denote it by whenever X has pdf . Considering two lifetime organisms or devices working one after another in a system (standby structure) and letting denote the lifetime of the ith organism, for . We will consider two situations: firstly when both organisms failed before time , and secondly, when the system failed before time . Suppose that and . Note that if where the the cdf of X is derived via
Denote In spirit of the equation (10), we get the cdf of the RV , when , as follows:
and on the other hand, using (10), the RV , for , has RF
From Theorem 1, and thus, for all . In Figure 1, we plot the graphs of and for (for the values out of the ordering relation is obviously fulfilled) to exhibit the stochastic ordering property.
Before stating the next result, we introduce some notation. In what follows, we will take
In the following result, it is demonstrated that given that at a certain time t, both a cold standby system and all the components in it are inactive, the overall idle time of the components is stochastically (with respect to likelihood ratio order) greater than the idle time of the cold standby unit.
Theorem 2.
Let be independent rvs such that follows exponential distribution with parameter . Let are also independent for a fixed . Then,
Proof.
Notice that has support , while has support . Thus, we need to prove that is increasing in for every , since for , one has . We have
, Therefore, for every , we have
where the change of variable has been made to derive the last equality. Since , thus
Hence, for all , we get
which is non-negative.Thus, the proof of theorem is completed. □
By considering a cold standby system composed of a single component with a general continues lifetime distribution equipped with one additional component with exponential distribution lifetime, it is realized by Theorem 2 that the idle time of the cold standby system is smaller, with respect to the likelihood ratio order, than the sum of the inactivity times of both components measured at a specified time t at which the system and its components are inactive and not functioning. The following technical lemma is useful and will be applied in the sequel.
Lemma 1.
Suppose that are m points of time with mean , and that are m non-negative rvs then where means equality in distribution.
Theorem 3.
Let be independent non-negative rvs, such that and also , where , are also independent where are m fixed time points and so are . Let . If
- (i)
- where in which and ;
- (ii)
- and have identical distributions;
- (iii)
- For and , ,
then:
Proof.
We first prove that . The result is then proved following what we discuss here. From Theorem 1.C.8 in Shaked and Shanthikumar (2007), if is a decreasing function then implies . Thus, if , since , thus it follows that . Using Lemma 1, it is realized that and, in addition, Hence, it follows that . Thus it is suffiecient to prove that is increasing in . We assume that is the indicator function of the set , which is equal with one if and it is equal with 0 if , where is the complement of the set A. Let us write for every ,
where stands for the maximum of a and b, and the last identity follows from the fact that for all from assumption (i), one has , thus . Therefore, for every since and are identical in distribution (assumption (ii)), thus
where . From assumption, for all , thus since the convolution of log-concave densities is log-concave, . From Theorem 1.C.53 of Shaked and Shanthikumar (2007), we conclude that
and since implies , thus one has
The following lemma is useful in proving next result.
Lemma 2.
Let be m dependent rvs which are non0negative and, further, let be independent. Then,
in which are m points of time such that .
Proof.
It suffices to prove that and have a common moment generating function. Denote and let have conditional pdf . Since ’s are independent, thus, for all we have
Now, let us write
where the last identity follows from the assumption that are independent. The proof is completed. □
The following result presents sufficient condition for the usual stochastic ordering between idle time of an inactive standby system of size two and the sum of the idle times of inactive components. It is worth mentioning that as the standby systems of size two are very important as an effective redundancy method in engineering reliability systems the previous results are also of particular interest when .
Theorem 4.
Let and be two independent rvs such that and are also independent for as two points of time. Suppose that for all Then,
Proof.
In a similar manner as in the proof of Theorem 3, it is sufficient to show that . From Lemma 2, when since and and also and are independent, thus we have . Thus we prove that
By routine calculation, it is evidently observed that (14) is satisfied if, and only if,
which holds if, and only if,
The inequality given in (15) holds true for as it can be obviously seen that
Thus, we only need to prove that the inequality given in (15) is satisfied for . Note that
where . Thus, we can get
Therefore, to prove (14), it is sufficient to show that for all ,
Since, for all we have thus it suffices to prove that
holds for all . That is, it is enough to defenestrate that for all ,
where
Let us assume that Then, we can show that
Since thus, for all . Hence, . Therefore,
which is non-negative if is decreasing in . This is also satisfied if the assumption “ for all ” holds. Now, assume that Then,
In a similar manner to the case when , now we can also established that
As a result, we have , for all . The proof of the theorem is now completed. □
In the context of the conditions of Theorem 4, one may question whether the assumption “ for all ” is attainable. The following remark clarifies the issue.
Remark 1.
Suppose that and represent, respectively, the lifetime of a component and the lifetime of the standby unit which are assumed to be independent. Note that for all , . We can write
where is a non-negative RV with pdf which is given by
Note that . Now, consider an such that , for which . We suppose that has a decreasing convex reversed hazard rate function. On using Jensen’s inequality, for all
Now, Theorem 4 is applicable as the sufficient condition of this theorem is satisfied.
We give the next example to fulfill the conditions in Theorem 4 in the case of heterogenous exponential components.
Example 3.
Suppose that and have exponential distribution with parameters and respectively. It can be checked that the reversed hazard rate function of exponential distribution is decreasing and convex. Thus, is a decreasing function in x which is further convex in x. The RV , as introduced in Remark 1 with pdf (16), has pdf
It is straightforward that, if , then is in . As a result, from (16), is also in that is for every . Since implies thus one can conclude that , for all . Therefore, for all . For example if and , then after some calculation
which is an increasing function. Hence, is one chooses , following the discussions in Remark 1 and since for all , , the assumption “ for all ”in Theorem 4 is fulfilled on that account and, consequently, or more accurately, .
3. Concluding Remarks
In this study, we have presented some results to obtain upper and lower stochastic bounds for the idle time of standby systems after their failure in the context of random lifetimes. These bounds are in fact some functions of the idle times of the components of the standby system. Thus, we can evaluate whether it is reasonable to equip a component with redundant standby units to minimize the idle time of a standby system. We used two informative and commonly applied stochastic orderings, namely the likelihood ratio ordering and the usual stochastic ordering. The problem of maintaining systems and replacing them with new systems and the same problem of tuning their components plays an important role in reliability engineering. This is because there are some systems (e.g., systems that gradually fail under certain degradation processes) that need to be in operation uniformly and it is very beneficial to have less idle time. The results obtained in this work may be useful in identifying situations where the idle time of inactive standby systems and the idle time (or a function thereof) of components in the system have a stochastic ordering property. Since the number of standby units can play a key role in reducing or even increasing costs and preventing further losses from early component failures, it becomes increasingly important to identify whether a standby system is highly survivable or equivalently has lower inactivity compared to components that failed earlier.
In the future of this study, we will consider two standby systems with different component lifetimes and possibly different numbers of components, and investigate some stochastic comparisons between the idle time of one system and the sum of the idle times of the components in the other system. We will also look for conditions for stochastic comparisons between the idle times of two standby systems.
Acknowledgments
The authors acknowledge financial support from the Researchers Supporting Project number (RSP2023R464), King Saud University, Riyadh, Saudi Arabia.
References
- Ahmad, I. A. , Kayid, M. and Pellerey, F. (2005). Further results involving the MIT order and the IMIT class. Probability in the Engineering and Informational Sciences, 19(3), 377–395. [CrossRef]
- Amini-Seresht, E. , Kelkinnama, M. and Zhang, Y. (2021). On the residual and past lifetimes of coherent systems under random monitoring. Probability in the Engineering and Informational Sciences, 35(3), 465–480. [CrossRef]
- Bayramoglu, I. and Ozkut, M. (2016). Mean residual life and inactivity time of a coherent system subjected to Marshall–Olkin type shocks. Journal of Computational and Applied Mathematics, 298, 190–200. [CrossRef]
- Block, H. W. Savits, T. H., and Singh, H. (1998). The reversed hazard rate function. Probability in the Engineering and informational Sciences, 12(1), 69-90. [CrossRef]
- Danjuma, M. U. , Yusuf, B. and Yusuf, I. (2022). Reliability, availability, maintainability, and dependability analysis of cold standby series-parallel system. Journal of Computational and Cognitive Engineering, 1(4), 193–200. [CrossRef]
- Finkelstein, M. S. (2002). On the reversed hazard rate. Reliability Engineering and System Safety, 78(1), 71-75. [CrossRef]
- Guo, Z. Zhang, J. and Yan, R. (2022). On inactivity times of failed components of coherent system under double monitoring. Probability in the Engineering and Informational Sciences, 36(3), 923–940. [CrossRef]
- Karlin, S. (1968). Total positivity (Vol. 1). Stanford University Press.
- Kayid, M. and Izadkhah, S. (2014). Mean inactivity time function, associated orderings, and classes of life distributions. IEEE Transactions on Reliability, 63(2), 593–602. [CrossRef]
- Kayid, M. , Izadkhah, S. and Abouammoh, A. M. (2018). Average inactivity time model, associated orderings and reliability properties. Physica A: Statistical Mechanics and its Applications, 492, 1389–1398. [CrossRef]
- Kayid, M. and Shrahili, M. (2023). Rényi Entropy for Past Lifetime Distributions with Application in Inactive Coherent Systems. Symmetry, 15(7), 1310. [CrossRef]
- Kayid, M. and Alshehri, M. A. Stochastic Comparisons of Lifetimes of Used Standby Systems. Mathematics 2023, 11, 3042. [Google Scholar] [CrossRef]
- Khan, R. A. , Bhattacharyya, D. and Mitra, M. (2021). On some properties of the mean inactivity time function. Statistics and Probability Letters, 170, 108993. [CrossRef]
- Lai, C. D. and Xie, M. (2006). Stochastic ageing and dependence for reliability. Springer Science and Business Media.
- Lin, Z. , Tao, L., Wang, S., Chen, C., Wang, J. and Ge, D. (2023). Reliability analysis of cold-standby systems using a self-stratifying subset simulation method. Journal of Statistical Computation and Simulation, 1-19. [CrossRef]
- Malhotra, R. , Alamri, F. S. and Khalifa, H. A. E. W. (2023). Novel Analysis between Two-Unit Hot and Cold Standby Redundant Systems with Varied Demand. Symmetry, 15(6), 1220. [CrossRef]
- Navarro, J. , Longobardi, M. and Pellerey, F. (2017). Comparison results for inactivity times of k-out-of-n and general coherent systems with dependent components. Test, 26, 822–846. [CrossRef]
- Navarro, J. and Calì, C. (2019). Inactivity times of coherent systems with dependent components under periodical inspections. Applied Stochastic Models in Business and Industry, 35(3), 871–892. [CrossRef]
- Ramezani Dobani, E. , Juybari, M. N. and Abouei Ardakan, M. (2022). System reliability-redundancy optimization with cold-standby strategy by fitness-distance balance stochastic fractal search algorithm. Journal of Statistical Computation and Simulation, 92(10), 2156–2183. [CrossRef]
- Salehi, E. and Tavangar, M. (2019). Stochastic comparisons on conditional residual lifetime and inactivity time of coherent systems with exchangeable components. Statistics and Probability Letters, 145, 327–337. [CrossRef]
- Shaked, M. and Shanthikumar, J. G. (Eds.). (2007). Stochastic orders. New York, NY: Springer New York.
- Toomaj, A. and Di Crescenzo, A. (2020). Generalized entropies, variance and applications. Entropy, 22(6), 709. 6). [CrossRef]
- Wang, J. and Ye, J. (2022). A new repair model and its optimization for cold standby system. Operational Research, 1-18. [CrossRef]
- Zhang, Z. and Balakrishnan, N. (2016). Representations of the inactivity time for coherent systems with heterogeneous components and some ordered properties. Metrika, 79, 113–126. [CrossRef]
Figure 1.
Plot of the reliability function of (solid line) and the reliability function of (dot-dashed line) for and for
Figure 1.
Plot of the reliability function of (solid line) and the reliability function of (dot-dashed line) for and for
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



