
Submitted:
03 August 2023
Posted:
04 August 2023
You are already at the latest version
Abstract
This work introduces a novel numerical method designed to address three-dimensional unsteady free surface flows incorporating integral viscoelastic constitutive equations, specifically, the K-BKZ-PSM (Kaye–Bernstein, Kearsley, Zapas - Papanastasiou, Scriven, Macosko) model. The new proposed methodology employs a second-order finite difference approach along with the deformation fields method to solve the integral constitutive equation, and the marker-particle method (known as \emph{Marker-and-Cell}) to accurately capture the evolution of the fluid's free surface. The newly developed numerical method has proven its effectiveness in handling complex fluid flow scenarios, including confined flows and extrudate swell simulations of Boger fluids. Furthermore, a new semi-analytical solution for velocity and stress fields is derived, considering fully developed flows of a K-BKZ-PSM fluid in a pipe.
Keywords:
K-BKZ
; PSM
; free-surface
; boger fluids
; finite difference
1. Introduction
Discovered and developed in the late twentieth century, viscoelastic materials have been used in a number of different applications (polymer industry, biomedicine, automotive industry, food, paints, etc). Their use is often based on trial and error procedures, resulting in wasting raw material and time before a good end product is achieved. To mitigate this problem, numerical simulations are often used to predict the best material processing conditions. Usually, the simulations are based on the finite element, finite volume, and finite difference methods, and the constitutive equations are, in most cases, defined by rheological differential models as Oldroyd-B [1], UCM (Upper-convected Maxwell) [2,3], PTT (Phan-Thien-Tanner) [4,5], FENE-P (Finite Extensible Nonlinear Elastic Peterlin) [6,7] and Giesekus models [7].
Simulations of three-dimensional real-world applications require a great deal of computational effort, making the convergence of the algorithms in a reasonable amount of time, a difficult task [8]. However, recent technological advances in scientific computing and the development of faster computers have led researchers to perform simulations in more complex geometries and use more sophisticated rheological models (that use integral equations instead of partial differential equations).
It is known that integral constitutive equations can better model various viscoelastic fluids, such as High-density polyethylene (HDPE) [9,10] and Low-density polyethylene (LDPE) [11] (used in the injection molding industry), and, one of the most successful integral models is the K-BKZ-PSM [12,13,14] (see also [15,16]). Rasmussen [17] developed a Galerkin finite element method for simulating three-dimensional transient viscoelastic flow. The method utilized a Lagrangian kinematic description and integral constitutive models. The numerical implementation was validated with the calculation of various transient and steady drag correction factors for the motion of a sphere in a cylinder containing an upper convected Maxwell fluid. Later, Marín and Rasmussen [18] extended the Galerkin finite element method for simulating three-dimensional transient and non-isothermal flows of K-BKZ type fluids. Therefore, there is significant interest among research groups worldwide in developing numerical methods to deal with the K-BKZ model, particularly with an emphasis on its application to real polymer flows. Many studies have focused on simulating real data and phenomena associated with polymer melt flows in rheology and polymer processing, however, there is still a need for further efforts to tackle numerical solutions of the K-BKZ-PSM for three-dimensional, time-dependent, free-surface flows.
The vast majority of problems studied in the literature (considering integral models) are about confined flows, such as entry flows [10,19,20] and flows in abrupt contractions [21,22,23,24]. Regarding free surface flows, Mitsoulis and Malamataris [23] extended the implementation of the Free Boundary Condition (FBC) method to viscoelastic fluids governed by integral constitutive equations. Specifically, they focused on the K-BKZ-PSM model. To validate their numerical approach, they used the Finite Element Method (FEM) to obtain results in simple test cases, including planar flow at an angle and Poiseuille flow in a tube, where analytical solutions are available for comparison. Furthermore, they have applied the FBC method to the K-BKZ-PSM model using data from a benchmark polymer melt, specifically the IUPAC-LDPE melt. Some other researchers have also considered flows with free surfaces [9,15,25,26,27,28,29]. Ganvir et al. [27] developed a novel approach for simulating extrudate swell utilizing an Arbitrary Lagrangian Eulerian (ALE) technique in conjunction with a finite element formulation. The constitutive behavior of the melt was modeled using a differential exponential Phan-Thien-Tanner (PTT) viscoelastic model. With the proposed method, they have conducted simulations of extrudate swell in both planar and axisymmetric extrusion scenarios, which involve an abrupt contraction ahead of the die exit. Tomé et al. [29] proposed a novel numerical approach to tackle the simulation of three-dimensional (3D) viscoelastic unsteady free surface flows governed by the Oldroyd-B differential constitutive equation. The numerical method involves solving the governing equations using a finite difference approach on a 3D-staggered grid. To validate the accuracy and reliability of the proposed technique, an exact solution of the flow of an Oldroyd-B fluid inside a 3D-pipe was employed. The results obtained through numerical simulations included the analysis of transient extrudate swell and jet buckling.
Summarizing, previous studies in the field of free surface flows have predominantly centered around two-dimensional (2D) scenarios and used the finite element method. These investigations primarily revolve around the extrudate-swell problem, considering both steady and unsteady flows, however, it’s worth noting that these studies relied on differential viscoelastic constitutive equations. Therefore, this work introduces a novel numerical method specifically designed to address 3D unsteady free surface flows incorporating integral viscoelastic constitutive equations, specifically, the K-BKZ-PSM model. The key innovation lies in the development of a robust numerical method for integral models using the finite difference method on a staggered grid, which enables accurate predictions of extrudate-swell phenomena. We also derive a new semi-analytical solution for the fully developed flow of a K-BKZ-PSM viscoelastic fluid, which can serve for other authors to verify their own numerical implementations of the K-BKZ-PSM integral viscoelastic model.
The paper is structured as follows. In Section 2, we introduce the governing equations for isothermal and incompressible viscoelastic flows modelled by the K-BKZ constitutive equation. Section 3 is devoted to the numerical method, where the variant of the marker-particle method which employs the finite difference method on a staggered grid is described for 3D flows using the K-BKZ-PSM viscoelastic integral model. In Section 4, we derive a new semi-analytical solution for the fully developed flow of a K-BKZ-PSM viscoelastic fluid. For validation of the newly-developed numerical method, two case studies are analyzed in Section 5, the confined pipe flow and the extrudate swell free surface flow of a Boger fluid. The paper ends with the conclusions in Section 6.
2. Governing Equations
The isothermal and incompressible fluid flow considered in this work is governed by the dimensionless continuity and linear momentum equations [29],
together with a constitutive equation for the stress. is a stress tensor given by
where is a non-Newtonian stress tensor, is the velocity field, p is the kinematic pressure and t is the time. In these equations, F represents the external forces, is the Reynolds number, is the zero-shear-rate viscosity, is the fluid density and U and L are the characteristic velocity and length scales, respectively. Note that all variables are dimensionless, with: , , , and .
The constitutive equation for the non-Newtonian stress tensor is given by the K-BKZ-PSM model [12],
where
is the memory function, is the relaxation time of the fluid, is a model parameter and is the number of modes. is the Papanastasiou-Scriven-Macosko decay function, being given by
is the Finger tensor, and , are the first and second invariants of , respectively. The parameters and are obtained from a fit to rheological data. is the Weissenberg number, the viscosity is given by and is the mean relaxation time [15].
In this work, the method of deformation fields [30] is used to update the Finger tensor as the fluid flows. In this methodology -deformation instants () are defined in the interval where the history of deformation is stored. This deformation is updated by solving the transport equation for ,
The governing equations are solved in a Cartesian 3D system where
This results in the following system of equations that need to be solved for the pressure, velocity and stress:
- continuity equation:
- linear momentum equations:where are the Cartesian components of the gravity vector.
- stress tensor :
- stress tensor τ:
- Finger tensor :
3. Numerical Method
The governing equations are solved by a variant of the marker-particle method [8,29], which employs the finite difference method on a staggered grid. The precision of the numerical technique and its validation for three-dimensional viscoelastic flows with a free surface is presented in the works of Tomé et al. [29,31] (which only use differential constitutive equations). The use of integral models in three-dimensional flows (considering free surfaces problems) has not yet been tested in the FREEFLOW-3D system (see Tomé et al. [8,29,31,32]).
In this methodology, the velocity field is approximated in the face of the cells, and the other variables, denoted by , are evaluated in the center of the computational cells (see Figure 1a). The technique adopted here is presented by Tomé et al. [31,32] for differential models, where the free surface is defined by marker particles that move with the local fluid velocity. In addition, the computational cells are defined as (see also Figure 1b):
- ■
- Fluid entrance : Inflow -(I),
- ■
- Fluid exit: Outflow -(O),
- ■
- Rigid boundaries: Boundary -(B),
- ■
- Empty cells: Empty -(E),
- ■
- Free surface cells: Surface -(S),
- ■
- Full cells: Full -(F).
To solve equations (1)-(2), one must specify boundary conditions for the velocity field. A velocity field () is prescribed in the fluid inlet cells (inflows), and a fully developed flow is assumed in the outflow (a homogeneous Neumann boundary condition is assumed, where n is the normal direction to the contour). The solutions and at time step are obtained in the following way: first, using the values of , the velocity and pressure fields at time are calculated. Then is used to calculate the tensor by the method of deformation fields and, lastly, the free surface is updated. Specifically, the following steps are performed:
Step 1 - Calculation of and
It is assumed that at time t the variables and the marker’s positions , are known. Then, and are obtained as follows:
1. Calculate , and, from the EVSS [33] transformation obtain ;
2. Calculate an intermediate velocity field using the ideas of the projection method [31,32] to uncouple the conservation of mass and momentum equations. An intermediate velocity field is obtained from Equation (2) using explicit Euler Methods, where is an approximation to . The boundary conditions for are the same as those for the final velocity . Details of boundary conditions for Full-cells (F), Outflow-cells (O), and free surface cells (S) are provided in detail in Tomé et al. [8,31] and will not be presented here for the sake of conciseness. It can be shown that possesses the correct vorticity at time , but it does not conserve mass in general. Therefore, there is a potential function so that,
3. Solve the Poisson equation for the potential function for every F-cell in the domain,
The boundary conditions required for solving this Poisson equation are the homogeneous Neumann conditions for rigid walls and inflows, while homogeneous Dirichlet conditions are used at outflows.
4. Compute the final velocity field from Equation (13);
5. Compute the final pressure field (see [8]) by
Details of the discretization of the equations (temporal and spatial) considering all types of cells (see Figure 1b) are given in [8,29,31].
Step 2 - Calculation of the extra stress tensor and free surface update
To calculate the extra-stress tensor , initially, the finger tensor is updated at for every Full-cell (F) and Surface-cell (S) for every intermediate time using Equation (7). Details of the calculation of the Finger B tensor (in two dimensions) can be found in [34] and will not be presented here because the extension to three dimensions is straightforward. Note that, for each computational cell (F and S), Equation (7) is solved N times (for each ), considering each of the components of the Finger tensor. Thus, considering three-dimensional flows, the computational cost to obtain the deformation history in each cell is very expensive. For Inflow cells (I), boundary cells (B), and empty cells (E), the finger tensor is the identity tensor. In the outflow, the Neumann condition is assumed.
The definition of the points for the calculation of the components of the Finger tensor and the tensor are given as follows. Let , be -points in the interval . Then the constitutive equation can be written in the form
where an even N is assumed. For and therefore, the first integral becomes,
and can be solved exactly.
Each integral under the summation operator is approximated by the 3-points quadrature formula
The coefficients are obtained by solving the -linear system
and are found to be
One of the key issues of the deformation fields method is how the integration nodes are distributed over the interval because such distribution can affect the accuracy of the results when solving complex flows. In this work, we used an ad hoc methodology for the discretization of the interval , where a geometric progression is employed to calculate the integration nodes. Note that we consider time-dependent flows, and therefore, the integration nodes are calculated at time as follows:
- a)
- Set and ;
- b)
- , where .
The last step in the calculation is to update the position of the moving free surface (the S-cell in Figure 1b). The fluid surface is represented by a piecewise linear surface composed of triangles and quadrilaterals having marker particles on their vertices (see [31]). The particle coordinates, stored at each time step, are updated, solving the equation
by Euler’s method. This then provides a particle with its new coordinates and therefore decides whether or not a new free surface cell is created.
4. Semi-analytical solution
To validate the numerical implementation, we will now derive a semi-analytical solution for a fully developed pipe flow of a K-BKZ-PSM fluid. For simplicity, we consider cylindrical coordinates (see Figure 2) and assume a pure shear flow.
We assume that and
The invariants and that are required in the Papanastasiou function take the form
and the tensor components are given by
Taking the change of variables these equations are rewritten as
Thus, the equations of continuity and balance of momentum become,
Integrating Equation (26) we obtain
Thus,
and Equation (27) is rewritten as,
The left hand side of Equation (30) is just a function of r, so must be constant, lets say C, and therefore . In this way, it follows that
where should be finite and therefore , leading to,
The second equation in Equation (25) can then be rewritten as
The inlet boundary condition allow one to determine the constant C. The inflow velocity is given by,
thus,
By mass conservation,
and integrating by parts leads to,
with
Thus, to determine C, we must obtain from Equation (33) and verify that
The steps to calculate semi-analytical solutions are as follows:
- Step 1:
- Set an interval such that .
- Step 2:
- Step 3:
The solution in three dimensions is obtained by making the change of coordinates as follows:
Thus, in three-dimensional Cartesian coordinates, we have that,
5. Results
The numerical code will now be used to solve confined (see Section 5.1) and free surface flows (see Section 5.2).
5.1. Confined pipe flows
In this confined pipe flow (see Figure 3), the fluid is assumed to have only one relaxation mode. Therefore, it is possible to compare the simulation results with the semi-analytical solution presented before. The parameters used in this simulation are:
- Diameter ;
- ;
- Number of deformation fields ;
- ;
- Geometry: x x ;
- Meshes (number of cells in the x, y and z directions): x12x60 (), x16x80 (), x20x100 (), x24x120 () and x28x140 ().
Figure 4a and Figure 4b shows the velocity profiles w and u, respectively, with corresponding cross-section velocity distributions in the plane (obtained mesh ). The velocity profiles are fully developed at (see also Figure 6a and Figure 7), suggesting that they have reached a steady-state condition. The velocity profile w shows a parabolic shape in the cross-section represented in Figure 4a, while the influence of the inflow can be observed in the cross-section depicted in Figure 4b, but the solution for v exhibits the expected physical behavior outside this region. Notice that, in all Full cells, the initial velocity vector is defined as .
Similarly to the velocity vector, initial conditions for pressure and tensors are set to zero in Full cells. As shown in Figure 5a and Figure 5b, the pressure and tensor profiles are in agreement with the physically expected profiles, i.e., linear profiles across the longitudinal direction (flow direction) and transverse direction (perpendicular to the flow), respectively. In addition, the values obtained for are comparable with the behavior of the analytical solution (see Figure 6b). In the cross-section represented in Figure 5b, there is an influence of the inflow (tensors are defined as zero in the inflow, and the finger tensor is defined as the identity matrix), but outside this region, the expected linear profile is obtained as previously stated (for further details, refer to Figure 6b).
Figure 5.
Pressure and distribution along the plane ().
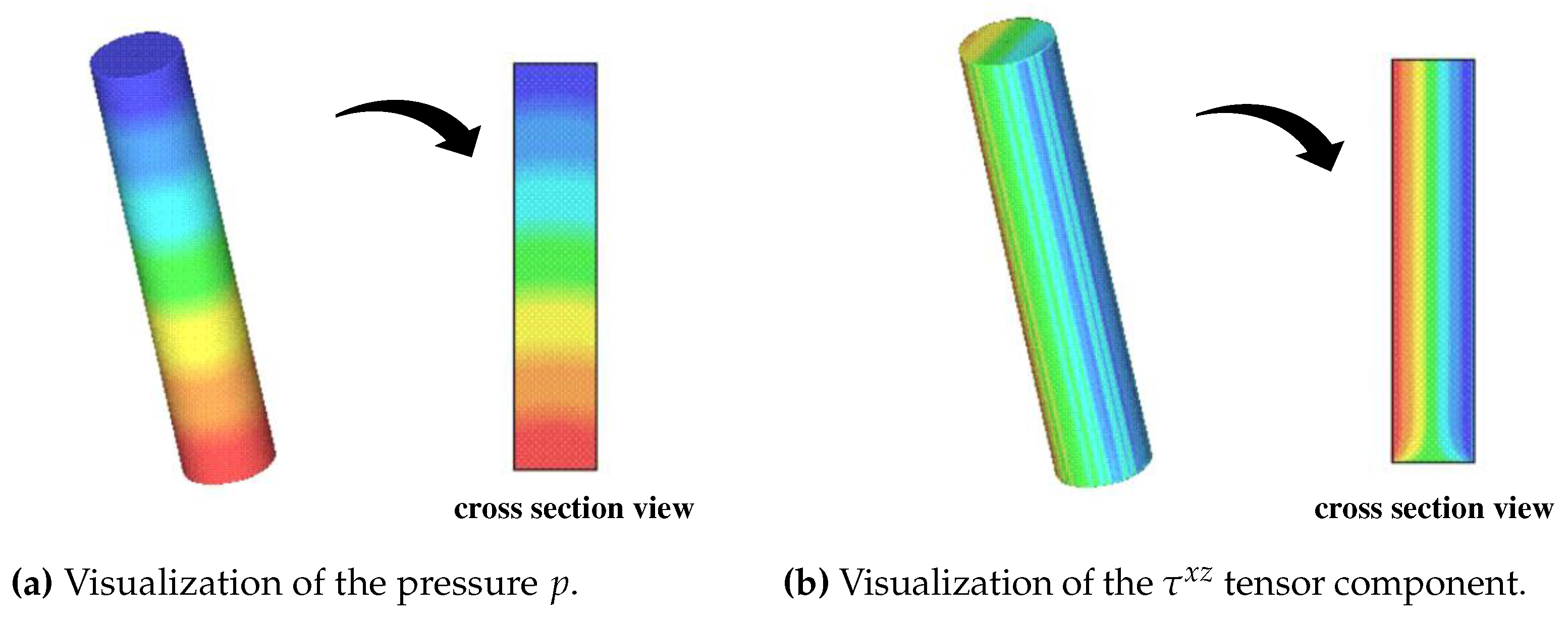
Figure 6.
Comparison between the analytical and numerical solutions for (a) w velocity component and tensors components (b) and (c) .
Figure 6.
Comparison between the analytical and numerical solutions for (a) w velocity component and tensors components (b) and (c) .
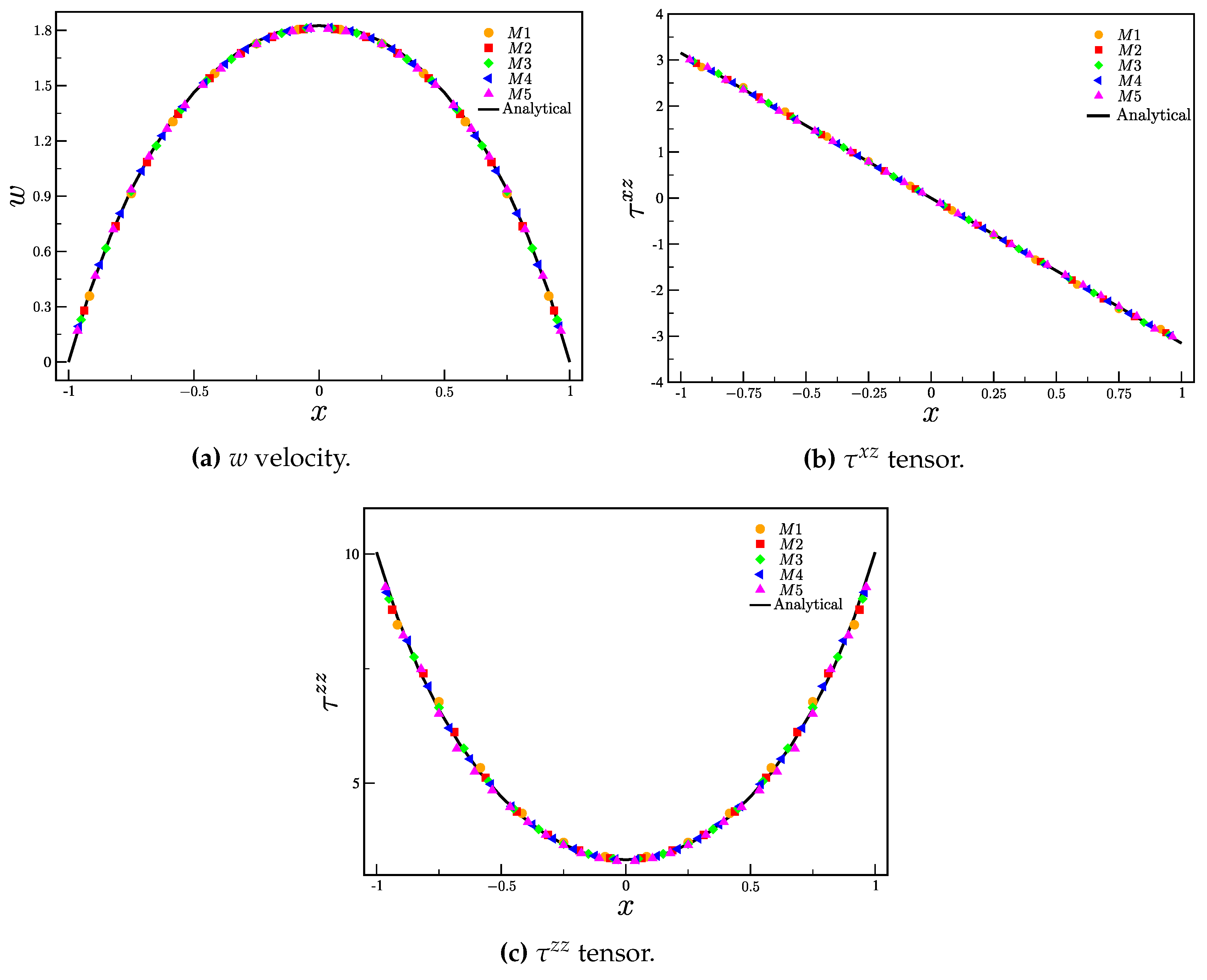
Figure 6a-Figure 6c show, respectively, the solution for the velocity w and stress components and , using meshes - . The profiles were obtained at and were taken in the center of the pipe, in the time (or ). The results were compared with the semi-analytical solution, with good agreement between the numerical results () and the semi-analytical results. The instant () was chosen because the velocity and stresses already show a steady state behavior (the velocity residual is small (see Equation (42)). The residual (for the velocities) is calculated as
where t is the simulation time, is the time step, and is the number of computational cells.
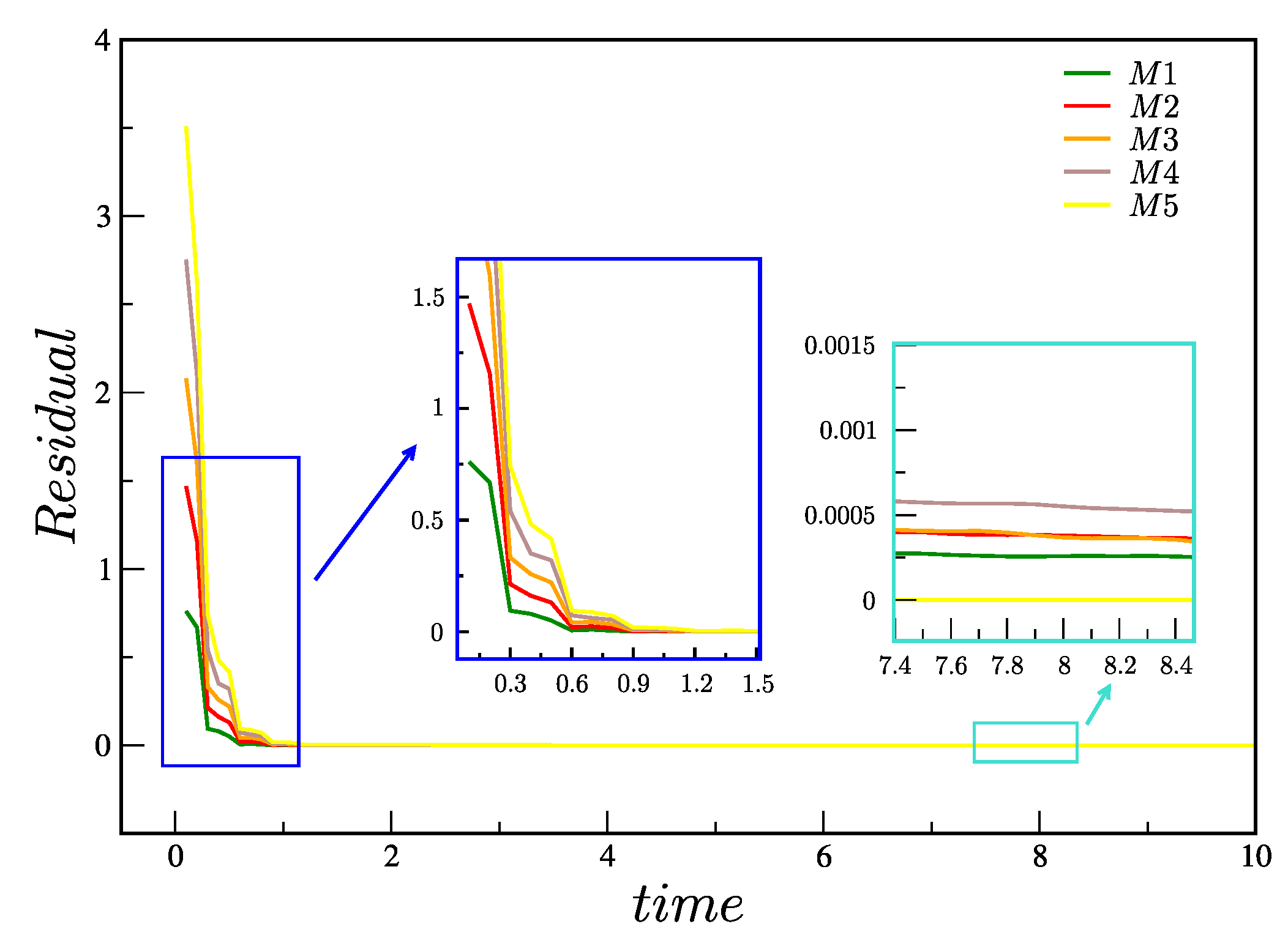
Figure 7 shows the calculation of the residuals in meshes up to time (or equivalently, ). It can be observed that the residuals in the five meshes decrease and show convergence towards a steady-state solution, thus proving the robustness of the numerical method. As expected, we also observe a smaller residual for the most refined meshes.
Figure 7.
Total residual in meshes , , , e up to (or ).
5.2. Free surface flows
In this subsection, we test the numerical method’s robustness by simulating the extrudate-swell phenomenon of Boger fluids. Please note that our aim is not to conduct an in-depth study of this type of flow in Boger fluids, instead, we focus on assessing the reliability of the numerical approach.
The phenomenon known as extrudate swell is very present in various industrial processes. In this phenomenon, the fluid flows over a pipe/die and swells outside the free surface region (the cross-sectional area of the extrudate - the material being extruded - is larger after exiting the die compared to the die orifice). This behavior is mainly due to the elastic recovery of the polymer chains after being subjected to high pressures and shear forces during the extrusion process. Figure 8a shows the domain used in the simulation, and Figure 8b illustrates the phenomenon of extrudate swell (with the contour lines representing the trajectory of the fluid’s free surface).
It should be remarked that simulating extrudate-swell can be challenging due to several numerical difficulties, which are now outlined: the extrusion process involves highly non-uniform and complex flow patterns, especially near the die exit. These flows experience rapid changes in pressure and velocity, making it difficult to model accurately; simulating extrusion processes requires discretizing the computational domain into smaller elements or cells, and, the geometry of the die and can be quite intricate. Moreover, the simulation must maintain numerical stability, which can be problematic in high-pressure and high-shear regions; simulating extrudate swell is computationally intensive, especially for large-scale industrial extrusion processes and using integral models; extrudate swell is a time-dependent phenomenon as the material continuously deforms and recovers during extrusion. Capturing this transient behavior accurately in numerical simulations requires precise time-stepping algorithms and may increase computational complexity. To address these challenges, researchers often resort to simplifications and assumptions to reduce computational complexity. However, in the context of this work, we take a different approach by considering the complete system of equations and accounting for the full 3D geometry.
To test robustness of the new numerical procedure, two different Weissenberg numbers were considered (case C1 - and case C2 - ), both using non-shear-thinning highly elastic polymer solutions (Boger fluids - see Table 1). Boger fluids are a type of dilute polymer solutions known for their remarkable elasticity, particularly at low apparent shear rates, and, this unique characteristic gives rise to a significant extrudate swell during the extrusion process [15,35,36,37]. This makes Boger fluids ideal to test the numerical implementation.
The following parameters were used in the simulations:
- Pipe dimension: x x ; (see Figure 8a);
- Pipe diameter ;
- Number of deformation fields ;
- C1 - , , ;
- C2 - , , .
Figure 9 shows the flow development of a Boger fluid for two different Weissenberg number values (cases and ). We conducted flow measurements at six different time points to analyze the behavior of the fluid in the system. The first four time instants were identical for both and cases, while the last two time points differed. Specifically, for the lower inlet velocity case, we considered time points and 6 seconds, and for the other case, the time points were and seconds. During the initial stages of both cases, the fluid exhibited a smooth flow with a parabolic profile as it exited the tube. However, as the process continued, swell occurred, causing the cross-sectional area of the extrudate to increase after leaving the die. This swelling behavior significantly affects the flow dynamics and needs to be carefully considered in the analysis. The simulation results show the development of the fluid front as it reaches the wall. Notably, there are distinct differences in swelling between two specific time instances: () and ().
To characterize the extrudate swell phenomenon, an important parameter is the dimensionless swelling rate , where is the maximum swelling value, and r is the pipe radius. For case , the maximum swelling value is found to be , while for case , the swelling rate increases to . This was expected since the Weissenberg number represents the ratio of the characteristic time scale of the elastic forces acting on a fluid to the characteristic time scale of viscous forces, and, when a polymer melt is subjected to shear flow (for example in an extruder), the long polymer chains experience deformation due to the flow-induced stretching and alignment. A higher Weissenberg number indicates a more elastic behavior of the polymer melt, leading to more significant elastic recovery and increased extrudate swell.
We may therefore conclude that the numerical method employed in the simulations demonstrates its capability to capture the transient physics of the extrudate swell problem in detail, even for a small difference in the Weissenberg number (cases and ). It accurately predicts the swelling behavior and allows for a better understanding of the process dynamics. By accounting for the material properties and flow conditions, the simulation provides valuable insights into the extrusion process and contributes to the optimization of extrusion operations.
6. Conclusions
In this work, a novel numerical method was developed to address three-dimensional unsteady free surface flows incorporating integral viscoelastic constitutive equations, specifically, the K-BKZ-PSM (Kaye–Bernstein, Kearsley, Zapas - Papanastasiou, Scriven, Macosko) model. To implement this new approach, we integrated it into the FREEFLOW-3D code [29], enhancing its capabilities for handling viscoelastic fluid behavior.
To validate the numerical methodology, we conducted simulations of K-BKZ-PSM fluids in a pipe. The results were compared with a newly derived semi-analytical solution, and we found that the simulations performed on five different meshes yielded excellent agreement with the analytical solution. Furthermore, we applied our methodology to tackle flows with free surfaces. One notable example was the simulation of the classic extrudate swell problem, which involved a highly elastic polymeric solution known as the Boger fluid.
The significance of this work lies in the scarcity of literature concerning the simulation of unsteady three-dimensional flows of K-BKZ-PSM fluids (and integral viscoelastic models in general) using finite differences, especially when considering problems with moving free surfaces. Therefore, we hope that our contributions will inspire and encourage other researchers to further develop and explore the numerical methods we have presented here.
In conclusion, our newly developed numerical method has proven its effectiveness in handling complex fluid flow scenarios, including free surface flows such as extrudate swell simulations. The successful validation against analytical solutions reinforces the reliability of our approach and opens up opportunities for broader applications in the field of viscoelastic fluid dynamics.
Author Contributions
All authors contributed equally to this work.
Funding
This research was funded by São Paulo Research Foundation (FAPESP) grants 2013/07375-0, 2019/07316-0; the National Council for Scientific and Technological Development (CNPq) grant 307483/2017-7; FCT (Fundação para a Ciência e a Tecnologia) and CMAT (Centre of Mathematics of the University of Minho) projects UIDB/00013/2020 and UIDP/00013/2020 and FCT funding, project 2022.06672.PTDC and contract 2022.00753.CEECIND.
Acknowledgments
J. Bertoco acknowledges the support by ICMC - Institute of Mathematical and Computing Sciences - USP and CMCC - Center for Mathematics, Computing and Cognition, UFABC. A. Castelo thanks the financial support from the São Paulo Research Foundation (FAPESP) grants 2013/07375-0, 2019/07316-0 and the National Council for Scientific and Technological Development (CNPq) grant 307483/2017-7. A. Castelo and J. Bertoco acknowledge the support by ICMC - Institute of Mathematics and Computational Sciences - University of Sao Paulo (USP). L.L. Ferrás would like to thank FCT (Fundação para a Ciência e a Tecnologia) for financial support through CMAT (Centre of Mathematics of the University of Minho) projects UIDB/00013/2020 and UIDP/00013/2020, and, would also like to thank FCT for the funding of project 2022.06672.PTDC. C. Fernandes acknowledges the support by FEDER funds through the COMPETE 2020 Programme and National Funds through FCT (Portuguese Foundation for Science and Technology) under the project FCT/2022.00753.CEECIND. Research carried out using the computational resources of the Center for Mathematical Sciences Applied to Industry (CeMEAI) funded by FAPESP grant 2013/07375-0.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| K-BKZ | Kaye–Bernstein, Kearsley, Zapas |
| PSM | Papanastasiou, Scriven, Macosko |
| EVSS | Elastic-Viscous Split Stress |
References
- Clermont, J.R.; Normandin, M. Numerical simulation of extrudate swell for Oldroyd-B fluids using the stream-tube analysis and a streamline approximation. Journal of Non-Newtonian Fluid Mechanics 1993, 50, 193–215. [Google Scholar] [CrossRef]
- Tomé, M.; Castelo, A.; Afonso, A.; Alves, M.; Pinho, F. Application of the log-conformation tensor to three-dimensional time-dependent free surface flows. Journal of Non-Newtonian Fluid Mechanics 2012, 175-176, 44–54. [Google Scholar] [CrossRef]
- Mompean, G.; Thais, L.; Tomé, M.; Castelo, A. Numerical prediction of three-dimensional time-dependent viscoelastic extrudate swell using differential and algebraic models. Computers & Fluids 2011, 44, 68–78. [Google Scholar] [CrossRef]
- Tomé, M.; Paulo, G.; Pinho, F.; Alves, M. Numerical solution of the PTT constitutive equation for unsteady three-dimensional free surface flows. Journal of Non-Newtonian Fluid Mechanics 2010, 165, 247–262. [Google Scholar] [CrossRef]
- Béraudo, C.; Fortin, A.; Coupez, T.; Demay, Y.; Vergnes, B.; Agassant, J. A finite element method for computing the flow of multi-mode viscoelastic fluids: comparison with experiments. Journal of Non-Newtonian Fluid Mechanics 1998, 75, 1–23. [Google Scholar] [CrossRef]
- Mu, Y.; Zhao, G.; Wu, X.; Zhai, J. Modeling and simulation of three-dimensional planar contraction flow of viscoelastic fluids with PTT, Giesekus and FENE-P constitutive models. Applied Mathematics and Computation 2012, 218, 8429–8443. [Google Scholar] [CrossRef]
- Hulsen, M.A.; van der Zanden, J. Numerical simulation of contraction flows using a multi-mode Giesekus model. Journal of Non-Newtonian Fluid Mechanics 1991, 38, 183–221. [Google Scholar] [CrossRef]
- Tomé, M.F.; Paulo, G.S.; Pinho, F.T.; Alves, M.A. Numerical solution of the PTT constitutive equation for unsteady three-dimensional free surface flows. Journal of Non-Newtonian Fluid Mechanics 2010, 165, 247–262. [Google Scholar] [CrossRef]
- Goublomme, A.; Crochet, M. Numerical prediction of extrudate swell of a high-density polyethylene: further results. Journal of Non-Newtonian Fluid Mechanics 1993, 47, 281–287. [Google Scholar] [CrossRef]
- Park, H.; Mitsoulis, E. Numerical simulation of circular entry flows of fluid M1 using an integral constitutive equation. Journal of Non-Newtonian Fluid Mechanics 1992, 42, 301–314. [Google Scholar] [CrossRef]
- Dupont, S.; Crochet, M. The vortex growth of a K.B.K.Z. fluid in an abrupt contraction. Journal of Non-Newtonian Fluid Mechanics 1988, 29, 81–91. [Google Scholar] [CrossRef]
- Papanastasiou, A.C.; Scriven, L.E.; Macosko, C.W. An Integral Constitutive Equation for Mixed Flows: Viscoelastic Characterization. Journal of Rheology 1983, 27, 387–410. [Google Scholar] [CrossRef]
- Bernstein, B.; Kearsley, E.A.; Zapas, L.J. A Study of Stress Relaxation with Finite Strain. Transactions of the Society of Rheology 1963, 7, 391–410. [Google Scholar] [CrossRef]
- Kaye, A. Non-Newtonian Flow in Incompressible Fluids. Aerospace Engineering Reports 1963, 134. [Google Scholar]
- Mitsoulis, E. Extrudate swell of Boger fluids. Journal of Non-Newtonian Fluid Mechanics 2010, 165, 812–824. [Google Scholar] [CrossRef]
- Mitsoulis, E. 50 Years of the K-BKZ Constitutive Relation for Polymers. ISRN Polymer Science 2013, 2013, 1–22. [Google Scholar] [CrossRef]
- Rasmussen, H.K. Time-dependent finite-element method for the simulation of three-dimensional viscoelastic flow with integral models. Journal of Non-Newtonian Fluid Mechanics 1999, 84, 217–232. [Google Scholar] [CrossRef]
- Marín, J.M.R.; Rasmussen, H.K. Lagrangian finite element method for 3D time-dependent non-isothermal flow of K-BKZ fluids. Journal of Non-Newtonian Fluid Mechanics 2009, 162, 45–53. [Google Scholar] [CrossRef]
- Luo, X.L.; Mitsoulis, E. An efficient algorithm for strain history tracking in finite element computations of non-Newtonian fluids with integral constitutive equations. International Journal for Numerical Methods in Fluids 1990, 11, 1015–1031. [Google Scholar] [CrossRef]
- Ansari, M.; Alabbas, A.; Hatzikiriakos, S.G.; Mitsoulis, E. Entry Flow of Polyethylene Melts in Tapered Dies. International Polymer Processing 2010, 25, 287–296. [Google Scholar] [CrossRef]
- Chai, M.; Yeow, Y. Modelling of fluid M1 using multiple-relaxation-time constitutive equations. Journal of Non-Newtonian Fluid Mechanics 1990, 35, 459–470. [Google Scholar] [CrossRef]
- Luo, X.L.; Mitsoulis, E. A numerical study of the effect of elongational viscosity on vortex growth in contraction flows of polyethylene melts. Journal of Rheology 1990, 34, 309–342. [Google Scholar] [CrossRef]
- Mitsoulis, E.; Malamataris, N.A. The free (open) boundary condition with integral constitutive equations. Journal of Non-Newtonian Fluid Mechanics 2012, 177-178, 97–108. [Google Scholar] [CrossRef]
- Olley, P.; Spares, R.; Coates, P. A method for implementing time-integral constitutive equations in commercial CFD packages. Journal of Non-Newtonian Fluid Mechanics 1999, 86, 337–357. [Google Scholar] [CrossRef]
- Luo, X.L.; Mitsoulis, E. Memory Phenomena in Extrudate Swell Simulations for Annular Dies. Journal of Rheology 1989, 33, 1307–1327. [Google Scholar] [CrossRef]
- Goublomme, A.; Draily, B.; Crochet, M. Numerical prediction of extrudate swell of a high-density polyethylene. Journal of Non-Newtonian Fluid Mechanics 1992, 44, 171–195. [Google Scholar] [CrossRef]
- Ganvir, V.; Lele, A.; Thaokar, R.; Gautham, B. Prediction of extrudate swell in polymer melt extrusion using an Arbitrary Lagrangian Eulerian (ALE) based finite element method. Journal of Non-Newtonian Fluid Mechanics 2009, 156, 21–28. [Google Scholar] [CrossRef]
- Ahmed, R.; Liang, R.; Mackley, M. The experimental observation and numerical prediction of planar entry flow and die swell for molten polyethylenes. Journal of Non-Newtonian Fluid Mechanics 1995, 59, 129–153. [Google Scholar] [CrossRef]
- Tomé, M.; Castelo, A.; Ferreira, V.; McKee, S. A finite difference technique for solving the Oldroyd-B model for 3D-unsteady free surface flows. Journal of Non-Newtonian Fluid Mechanics 2008, 154, 179–206. [Google Scholar] [CrossRef]
- Hulsen, M.; Peters, E.; van den Brule, B. A new approach to the deformation fields method for solving complex flows using integral constitutive equations. Journal of Non-Newtonian Fluid Mechanics 2001, 98, 201–221. [Google Scholar] [CrossRef]
- Tomé, M.; Filho, A.; Cuminato, J.; Mangiavacchi, N.; Mckee, S. GENSMAC3D: a numerical method for solving unsteady three-dimensional free surface flows. International Journal for Numerical Methods in Fluids 2001, 37, 747–796. [Google Scholar] [CrossRef]
- F. , A.C.; Tomé, M.; César, C.; McKee, S.; Cuminato, J. Freeflow: an integrated simulation system for three-dimensional free surface flows. Computing and Visualization in Science 2000, 2, 199–210. [Google Scholar] [CrossRef]
- Rajagopalan, D.; Armstrong, R.C.; Brown, R.A. Finite element methods for calculation of steady, viscoelastic flow using constitutive equations with a Newtonian viscosity. Journal of Non-Newtonian Fluid Mechanics 1990, 36, 159–192. [Google Scholar] [CrossRef]
- Tomé, M.; Bertoco, J.; Oishi, C.; Araujo, M.; Cruz, D.; Pinho, F.; Vynnycky, M. A finite difference technique for solving a time strain separable K-BKZ constitutive equation for two-dimensional moving free surface flows. Journal of Computational Physics 2016, 311, 114–141. [Google Scholar] [CrossRef]
- Mitsoulis, E. The Numerical Simulation of Boger Fluids: A Viscometric Approximation Approach. Polymer Engineering and Science 1986, 26. [Google Scholar] [CrossRef]
- López-Aguilar, J.E.; Tamaddon-Jahromi, H.R. Computational Predictions for Boger Fluids and Circular Contraction Flow under Various Aspect Ratios. Fluids 2020, 5. [Google Scholar] [CrossRef]
- Satrape, J.; Crochet, M. Numerical simulation of the motion of a sphere in a Boger fluid. Journal of Non-Newtonian Fluid Mechanics 1994, 55, 91–111. [Google Scholar] [CrossRef]
Figure 1.
(a) Typical three-dimensional staggered cell and (b) Illustration of cell type classification used.
Figure 1.
(a) Typical three-dimensional staggered cell and (b) Illustration of cell type classification used.
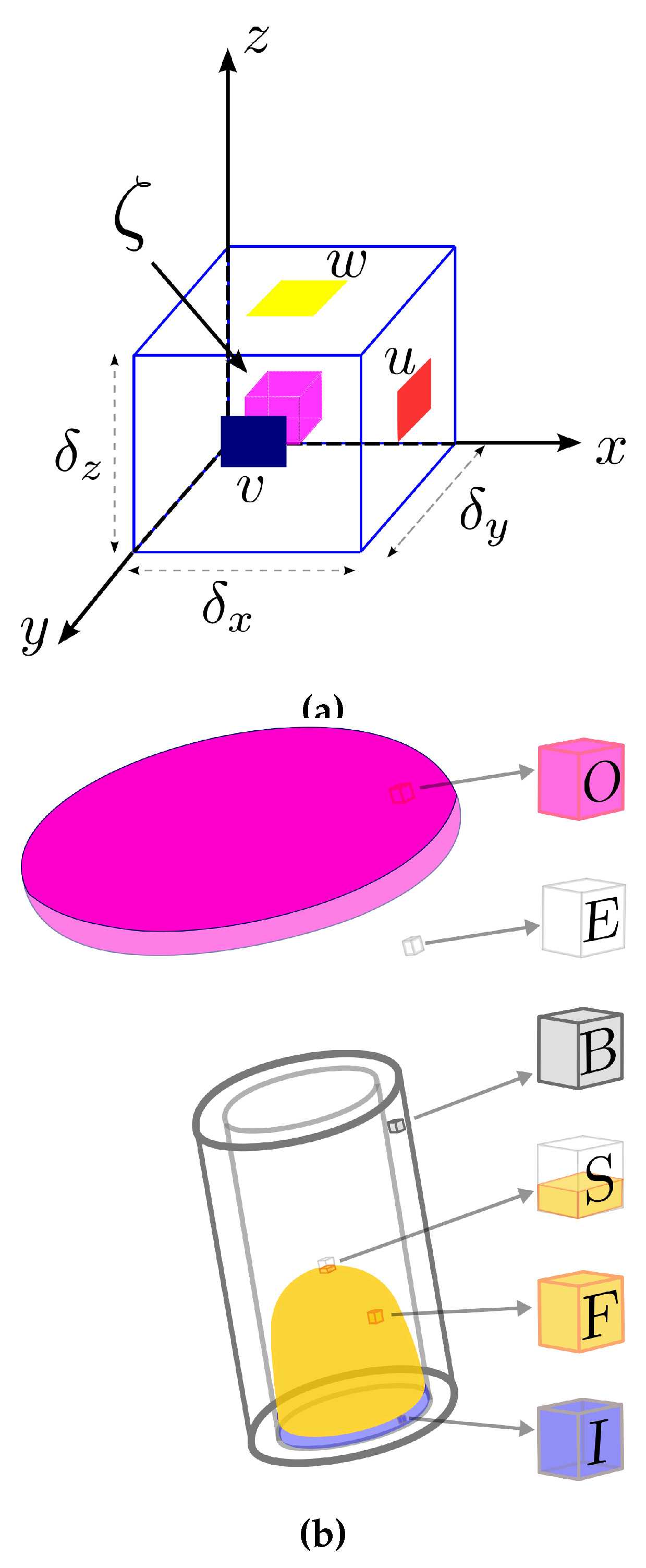
Figure 2.
Representation of the pipe and a section in the plane.
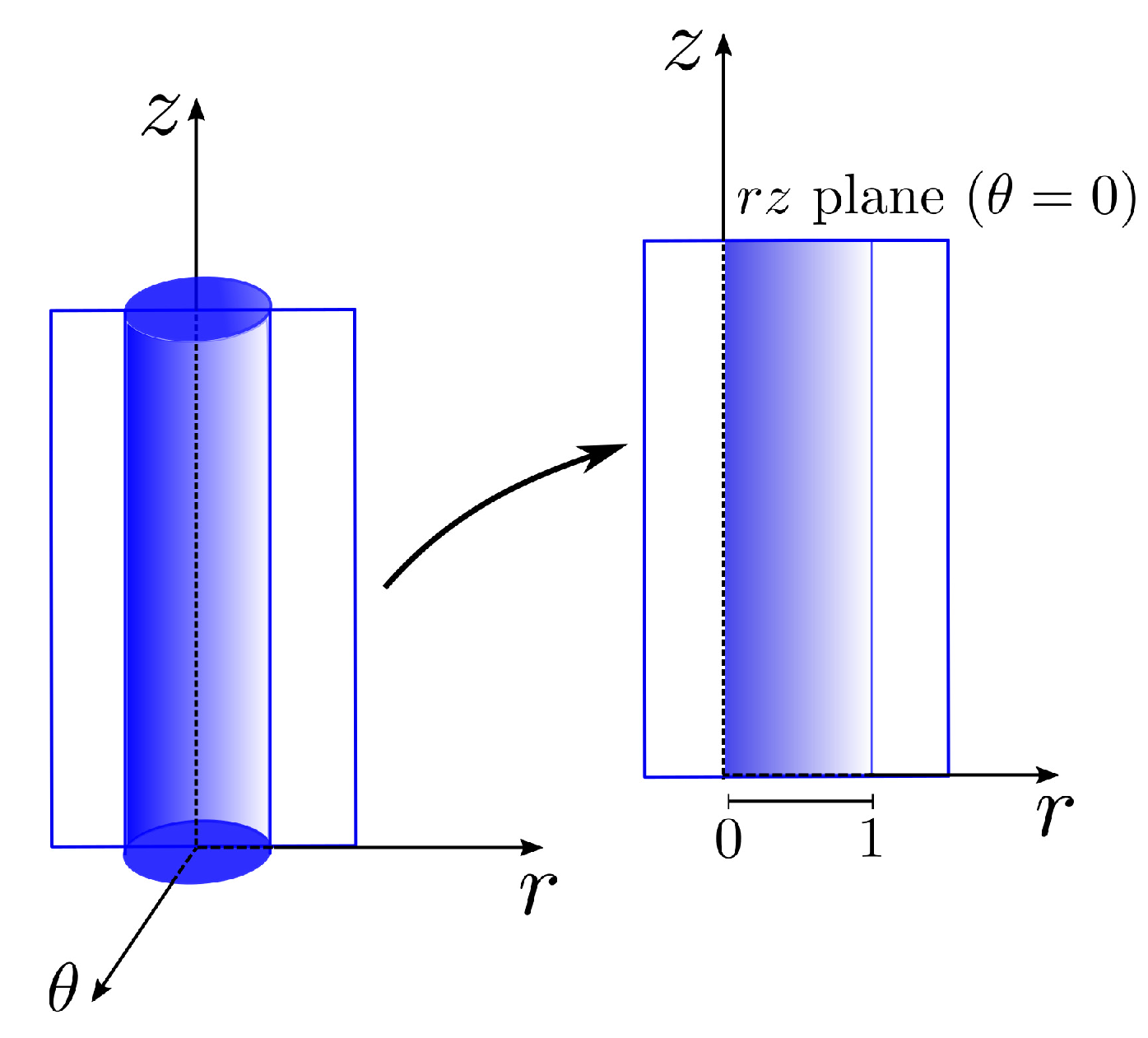
Figure 3.
Illustration of the FREEFLOW-3D visualization interface. Visualization of the confined flow in mesh for .
Figure 3.
Illustration of the FREEFLOW-3D visualization interface. Visualization of the confined flow in mesh for .
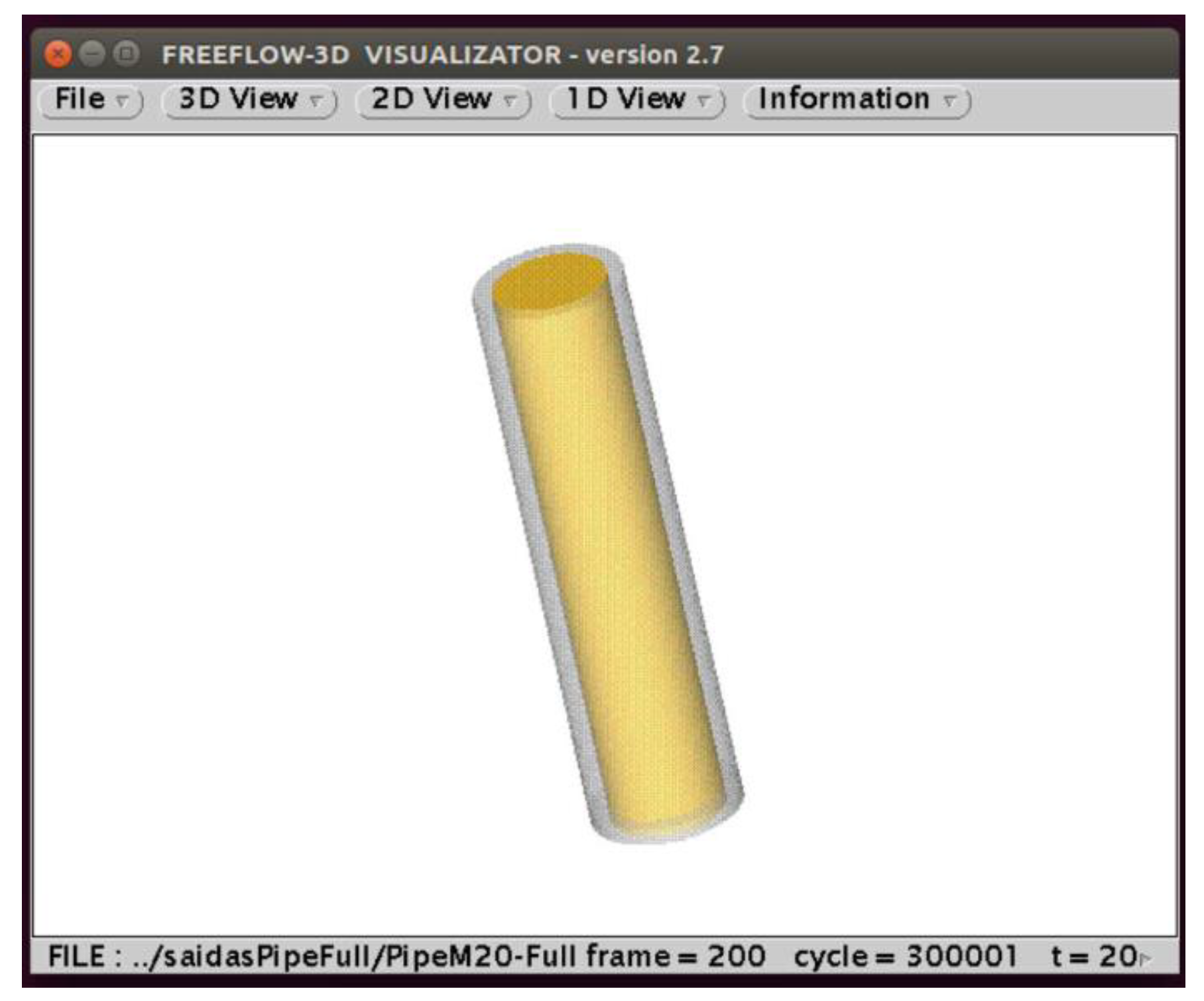
Figure 4.
Velocity components u and w of along the plane () at .
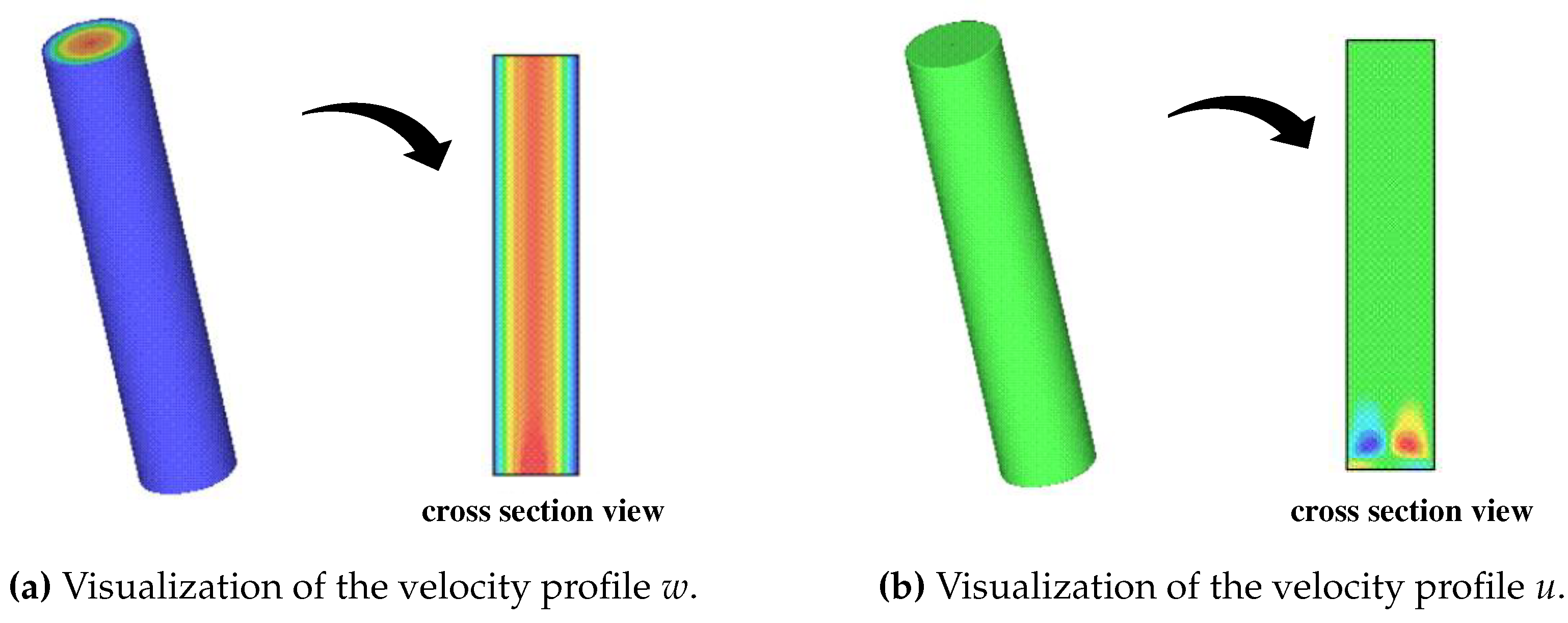
Figure 8.
Schematic of a free surface simulation in the FREEFLOW-3D software. (a) Schematic representation of the domain; (b) Illustration of the extrudate swell. The fluid exits the tube and starts to swell.
Figure 8.
Schematic of a free surface simulation in the FREEFLOW-3D software. (a) Schematic representation of the domain; (b) Illustration of the extrudate swell. The fluid exits the tube and starts to swell.
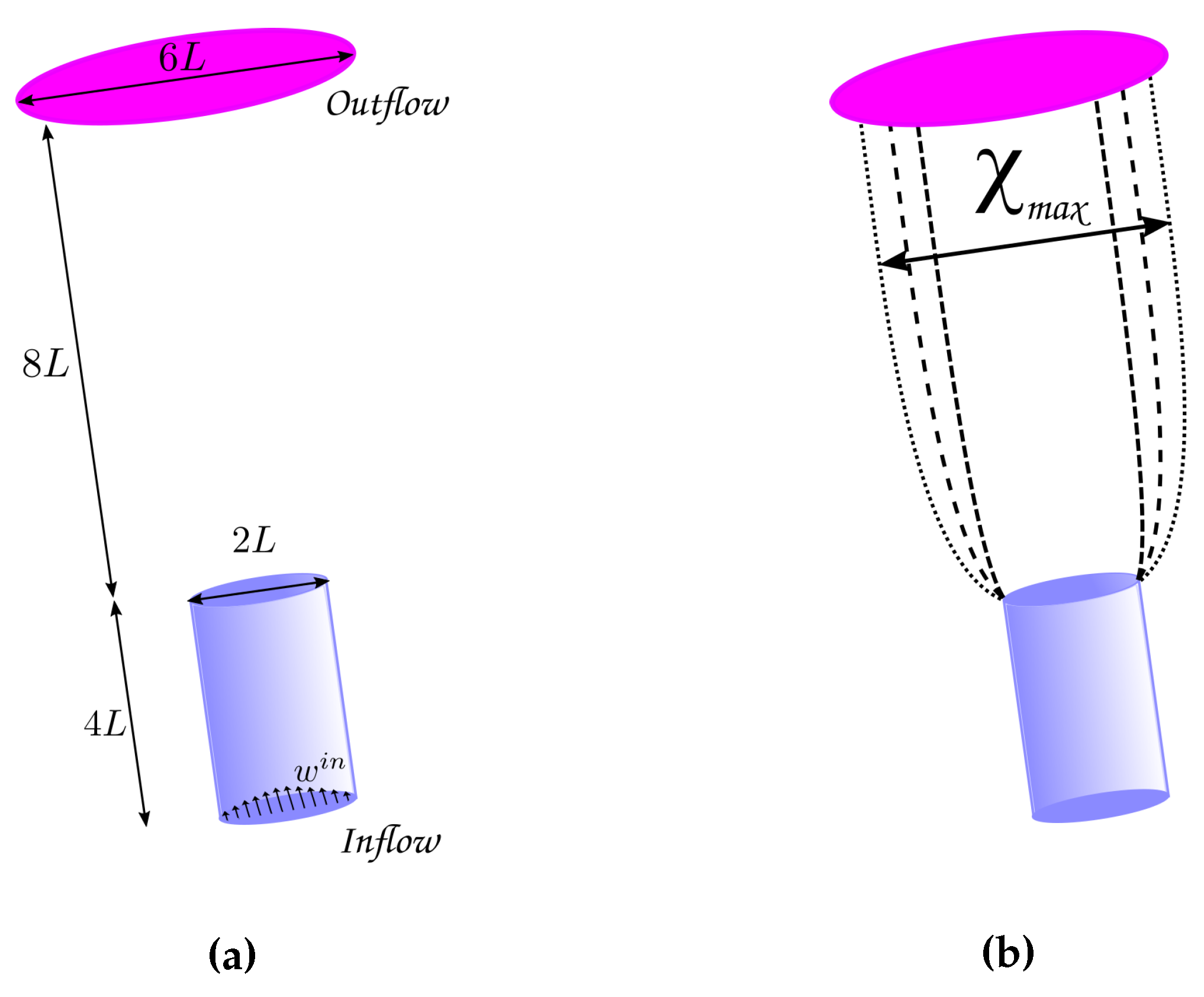
Figure 9.
Flow development of a Boger fluid for two different inlet velocities (cases and ).
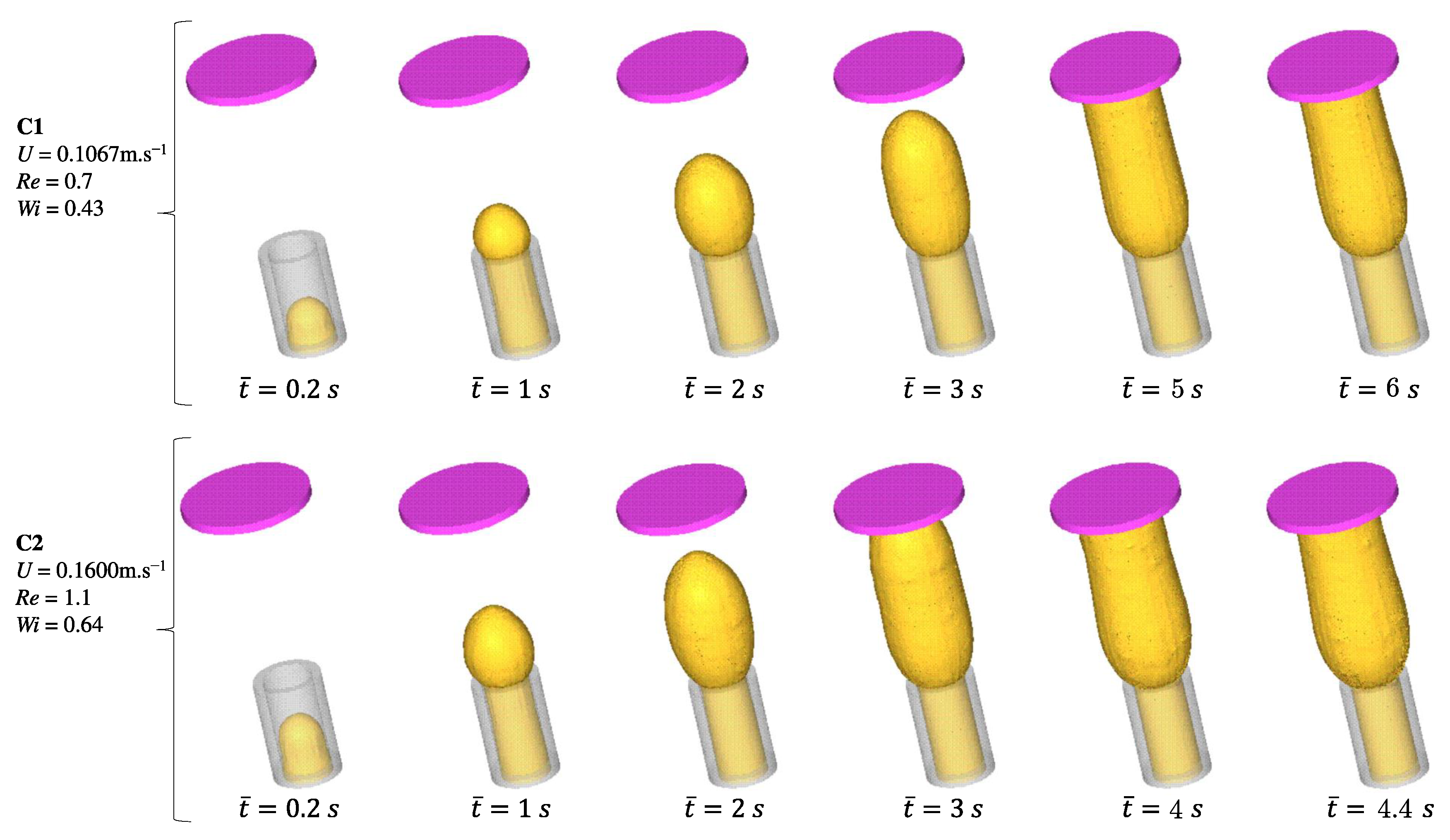

Table 1.
Parameters of the fluid used in the extrudate swell problem (see Mitsoulis et al. [15]).
Table 1.
Parameters of the fluid used in the extrudate swell problem (see Mitsoulis et al. [15]).
| , | |||
| s, , Pa.s | |||
| k | [s] | [Pa] | [Pa.s] |
| 1 | s | Pa | Pa.s |
| 2 | s | Pa |
Pa.s |
| 3 | s | Pa | Pa.s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



