
Submitted:
13 August 2023
Posted:
14 August 2023
You are already at the latest version
Abstract
The center of mass dynamics of human seated posture in a work environment under hypogravity (0<g<1) have rarely been investigated and it remains to be accomplished. The present study determined the difference in the body system of 32 participants working under simulated 1/6g (Moon) and 1g (Earth) for comparison reason using static and dynamic action measurements. This was based on analyzing the participant's center of mass before, during, and after the task when they started to get fatigued. According to this analysis, there is a positive relation (p<0.01) with a positive coefficient of correlation between CoM body shift down along the Y axis and gravity level for males and females. At the same time, the same positive relationship (p<0.01) between the tilt of the body back along the Z axis and the level of gravity was found only in females. This offers fresh perspectives for comprehending hypogravity. It can also improve workplace ergonomics, body stability, equipment design, and biomechanics.
Keywords:
postural stability
; reduced gravity
; manual handling
; biomechanics
1. Introduction
The study of the center of mass (CoM) is crucial for workplace ergonomics [1,2,3,4,5] because it helps to optimize the design of work environments, equipment, and tasks to ensure the safety, comfort, and well-being of workers. The location of the CoM of a seated participant can be used for seat design, restraint systems [6], and other human-centered products and environments. Also, its understanding and consideration are important in body stability [7], posture and alignment [8], lifting and manual handling [9,10], and biomechanics [11]. According [12], evaluation of the CoM requires a time-efficient measurement and high accuracy, especially in the case of body balance measurements.
The CoM is one of the main problems of biomechanics and locomotion. It helps during the modeling of the human body and its activity [13], i.e., assessment of the technique of static positions and different kinds of movement. In general, the CoM can be measured using various direct and indirect methods. In some situations, a laboratory approach with the reaction board on which a participant can lie can be used for indirect measurements [14]. But this needs time and wearing off the participants’ clothes. The direct approaches include methods with live subjects and cadavres [15]. In this case such as stereophotogrammetry systems, electromyography (EMG) and force platforms, can be used. Direct approaches are expensive, require sufficient measurement space, and are difficult to implement [16]. In this regard, there is a growing interest in new methods that provide ease of measurement, better accuracy, and non-invasiveness. In other cases, especially during movement, indirect methods may be useful. Indirect methods include an optical motion capture system with reflected markers [17], motion capture systems using wearable inertial measurement units (IMUs) [7,18] and markerless motion capture [19,20]. Due to the technical limitations of the listed methods, the marker-free motion capture method can be one of the most convenient and non-invasive methods for analyzing dynamic motions, especially for underwater simulation of motions in hypogravity (HG) conditions.
The aim of this study was to determine the CoM of the seated underwater participants to simulate HG using indirect methods, markerless motion capture, with 3D visualization elements. In this study, whole body CoM location analysis was assessed relative to the hip joint of participants performing outstretched arm and arm bent at the elbow (S), dynamic (D) in two different environments with 1/6g and 1g for comparison purposes. The hypothesis was that under HG conditions, the upper body would exhibit a posterior tilt as opposed to 1g when engaging in tasks. The findings of this investigation revealed a substantial alteration in the Center of Mass (CoM) position due to the transition between different gravitational environments.
2. Materials and Methods
2.1. Experimental setup
The study included a total of 32 participants (18 males and 14 females). Prior to the experiments, each participant signed a written informed form. The readiness of each participant for physical activity was evaluated through the completion of a questionnaire [21], see Supplemetary materials Figure S1. The Ethics Committee of Swiss Federal Institute of Technology gave its approval to all the study's steps.
A water tank (Swissub, Vaud, Switzerland) was used to simulate HG (1/6g). The gravity simulation was carried out with ballasts distributed on the body parts (forearm, upperarm, torso) of the participants, having the necessary buoyancy proportional to the lunar gravity (g=1.626 m/s2), see Figure 1. All participants conducted 2 types of tasks (S) and dynamic (D), with two tasks’ intensities: (1kg and 3kg). Range of motion (ROM) for dynamic tasks was determined to have a minimal effect on the force of water resistance [23]. The task intensity was provided with workloads held by the participants in hand.
The details of HG simulation model are described in the main author's study [22] and the same author's doctoral dissertation [23]. The heads of the participants sitting on the adjustable chairs without backrest and armrest were not submerged.
The location of subjects' CoM was determined by using a vision-based markerless motion capture method under 1g and 1/6g for comparison reason. Three video cameras with resolutions of 1,920x1,080 pixels at 30Hz (4k condition) (Gopro 8, Woodman Labs, Inc. San Mateo, California, U.S.) were used for the chosen method. All cameras were calibrated using software created by the computer vision laboratory (CVLab) [24] at the Swiss Federal Institute of Technology. Openpose software (version 1.4.0) [25,26,27] was installed from GitHub to recognize participant’s 2D skeletons. To run this software GPU (GEFORCE GTX 2080, Nvidia Corp, Santa Clara, CA, USA) was provided. Twenty-five critical recognized participant’s skeleton keypoints were saved in JSON format for each frame and camera. Using predictions from manually annotated data, and the data recognized by software, joint recognition's quality was examined, see details in [28]. The results showed a sufficient quality of recognition. Furthermore, a customized MATLAB script was utilized to determine the CoM. This script reads JSON-formatted input data that it has received after performing a triangulation.
2.3. Statistical methods
The distribution of data was examined utilizing Microsoft Excel and the statistical software Stata 17 (SataCort, Colifirnia, US) and R software (R Core Team, USA). G*Power software was used to find the necessary number of participants for this experiment, see results in the Supplementary materials Table S1. Body segment masses and dimensions were assessed with respect to statistical information [29]. Likewise, the Center of Mass (CoM) for the body segments was approximated using the methodology of the same author. To illustrate, for the forearm, shoulder, and trunk, the CoM locations are positioned at 43%, 43.6%, and 63% of the segment length, correspondingly, for males, and at 43.4%, 45.8%, and 56.9%, respectively, for females, measured from the proximal end. From the hip joint to the shoulder, the length of the entire trunk is 100%. The descriptive statistics of all participants anthropometric data (all experiments) are presented in Table 1.

Table 1.
Descriptive statistics of the participants. Modified and adapted from [23].
Table 1.
Descriptive statistics of the participants. Modified and adapted from [23].
| Study variable | Total (N=32) | Male (N=18) | Female (N=14) | p-value | |
| Mean (SD1) | Min/Max | Mean (SD) | Mean (SD) | ||
| Age (year) | 33.59 (8.16) | 25/55 | 34 (9.62) | 33.07 (6.11) | 0.742 |
| Height (m) | 1.75 (0.11) | 1.54/1.95 | 1.83 (0.07) | 1.66 (0.06) | ˂0.001 |
| Body mass (kg) | 71.22 (17.01) | 43.8/114.10 | 82.92 (13.02) | 56.19 (5.95) | ˂0.001 |
| Upper arm (m)2 | 0.34 (0.04) | 0.25/0.40 | 0.35 (0.33) | 0.32 (0.03) | 0.007 |
| Forearm (m)3 | 0.28 (0.03) | 0.20/0.33 | 0.30 (0.02) | 0.25 (0.02) | ˂0.001 |
| Torso volume (dm³) | 37.00 (11.00) | 28.00/61.00 | 44.71 (6.93) | 27.00 (4.42) | ˂0.001 |
| Upper arm volume (dm³) | 2.00 (0.80) | 0.8/3.8 | 2.70 (0.67) | 1.48 (0.38) | ˂0.001 |
| Forearm volume (dm³) | 1.00 (0.30) | 0.4/2.00 | 1.37 (0.20) | 0.72 (0.16) | ˂0.001 |
1 SD – standard deviation. 2 Upper arm (m) – the distance between the keypoints related to the shoulder and the upper part of the forearm. 3 Forearm (m) – the distance between keypoints related to the lower part of upperarm and upper part of the hand.
The normality of the data was assessed through the application of the Shapiro-Wilk test, see Supplementary materials Table S2. Gender/gravity level was used as an independent variable, and endurance time (min) was used as the dependent variable, to calculate the mean of the value of the CoM results.
2.4. CoM assesment
At the start, middle, and end of the experiment (the average of the first 5 seconds to 1 minute), each participant had three measurements collected. The duration of the experiment was determined by the endurance time of the participants. The endurance time is the period after the participant's capacity to exert force has been lost when muscular tiredness begins to set in. Task duration data and CoM position data were taken into consideration as the analysis's starting point in this study. Table 1 displays the data for the total endurance time for males and females for each task.
Table 1.
Endurance time of the participants. Tasks: static (S) and dynamic (D) tasks are presented separately. M- males, F – females. Modified and adapted from [22].
Table 1.
Endurance time of the participants. Tasks: static (S) and dynamic (D) tasks are presented separately. M- males, F – females. Modified and adapted from [22].
| Gravity | mn1 ET (min) for 1 kg load | mn ET (min) for 3 kg load |
| Static (S) (22 participants) | ||
| 1g | 1.67/0.95 | 0.85/0.34 |
| 1/6g | 7.73/6.21 | 2.65/0.65 |
| Dynamic (D) (25 participants) | ||
| 1g | 1.30/0.80 | 0.79/0.35 |
| 1/6g | 14.93/9.34 | 2.16/0.82 |
1 mn- mean value.
The hip joint keypoint (pelvis) was used to determine the CoM. For each recorded frame, the CoM of the participants in the seated position was estimated automatically.
The following equation of the weighted sum of limb centers was used [30]:
- ;
3. Results
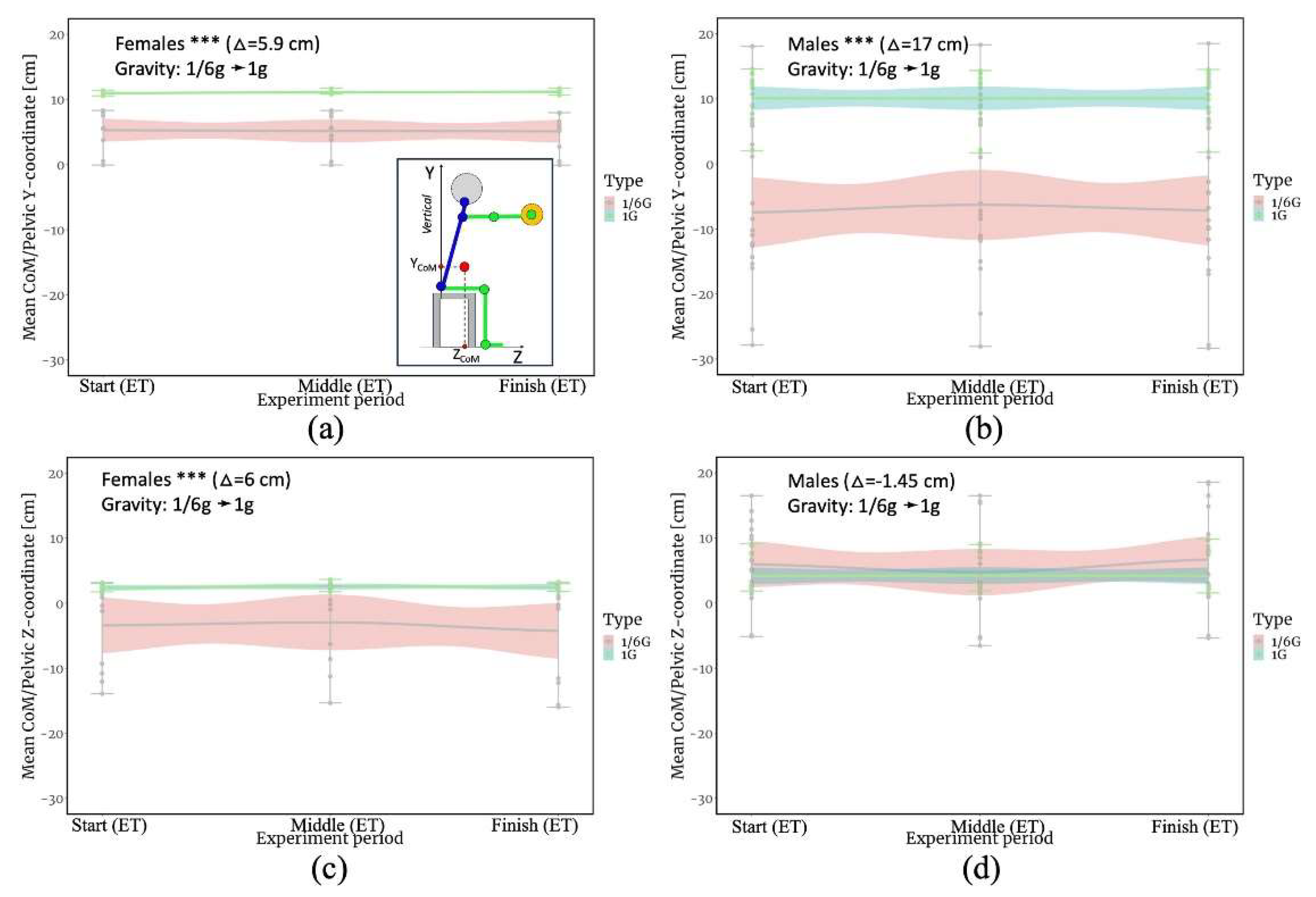
This analysis was conducted to assess the correlation between factors related to studies like the study of CoM and gravity level. The graphs for the following variables' Y and Z CoM coordinates were used. The results of the regression for all these factors for males and females individually for the combined data sets for static and dynamic tasks are shown in Figure 2 below.
Static and dynamic tasks were combined, since statistical calculations showed that if the type of task practically does not affect the results, then the gender of the experiment participants affects the change in the result. The Supplementary materials, Table S3 provides statistical findings on computed CoM for split and combined data sets for males and females. All analyses are conducted to contrast the impact of two different environments (1g and 1/6g) on the observed indicators (CoM). Comparatively, the findings show that the CoM deviations vary greatly depending on the environment. The significance of this difference was demonstrated by the value of p, which reveals how significant the deviation is in general. As demonstrated in Figure 2, the average CoM/Pelvic Y (vertical axis)-coordinate is displaced downward significantly (p<0.01) for females by 5.9 cm and downward for males by 17 cm. Only one significant correlation between the CoM/Pelvic Z (horizontal axis) deviation for females doing static and dynamic tasks was found (p<0.01) at 6 cm.
4. Discussion
Studying the CoM is crucial for workplace ergonomics, optimizing the work environment, equipment, and tasks for worker safety and comfort. Understanding the center of mass is vital for multiple reasons. Firstly, it determines stability, impacting accident and fall risks. Ergonomists analyze it to identify stability issues, enhance safety, and prevent accidents. Secondly, it influences posture and alignment, reducing musculoskeletal disease risk and ensuring comfort. Thirdly, it's crucial for safe lifting and movement. Ergonomic principles leverage CoM knowledge to guide lifting techniques, define load limits, and design equipment, reducing body strain. Considering the CoM enables ergonomic strategies that minimize injury risks, enhance worker well-being, and boost work efficiency.
The human body's reaction to HG circumstances is still largely unknown, even though the present focus of space exploration efforts is on how to go to Mars or beyond. In the frame of this work, a method for CoM prediction under simulated HG for examining human posture was described. The uniqueness of this study resides in the fact that for the first time, participant posture as indicated in CoM location was evaluated in accordance with the load under HG while seated. Additionally, simulating the biomechanics of the upper limbs at the workplace under HG is a recent study subject, and there is still a knowledge gap in this field.
Tracking CoM is a challenging problem. During this study, this problem was automized by the motion capture method application. It allowed collecting the input on specific keypoints related to the head, upper, and lower extremities, and torso. The result of this study shows that for static tasks and dynamic tasks for females and males, there was a significant correlation (p<0.01) between the CoM displacement along Y (vertical axis) and the level of gravity change (from 1/6g to 1g), with a range of correlation coefficient 5.9 cm to 17 cm, see Figure 2 (a) and (b). Only one significant correlation was found between the deviation of the CoM along Z (horizontal axis) and the change in the level of gravity (from 1/6g to 1g) for females performing static and dynamic tasks. Correlation coefficient is 6.02 cm (p<0.01). This can probably be explained by the fact that when the body is under stress (under load, under the earth's gravity), a person tends to straighten his back in a neutral sitting position. This theory is supported by the result obtained in the Figure 2 (c), where the CoM of females tends to the vertical under the 1g. At the same time, the CoM shifts upwards, as the results of females and males show, see Figure 2 (a)-(b). The reverse situation is observed with simulated HG. This is likely since the body of the participants becomes lighter in the simulated lunar gravity, and the postural stability and overall adaptability of the body to the environment changes. Even with a restraint system, participants' bodies are less stable in simulated lunar gravity, so this should be considered when designing workplace design requirements. These results are consistent with the previously reported in [23] results of spine inclination of the same participants in relation to the vertical. According to the author, the findings regarding alterations in body positioning indicate a significant (p<0.01) backward shift in torso inclination during seated positions while executing both static and dynamic tasks under HG.
This may also be due to changes in participants' tactile, vestibular, or visual perception and body tilt under simulated HG. This area is still under investigation and there are many ambiguities. In accordance with [31], to understand this, it is necessary to conduct multisensory observation combining visual, vestibular, somatosensory, and proprioceptive studies. Another author [32] found a problem of perception of HG related to "G-shortage" illusion that can lead to for the underestimation of roll tilt.
Another finding of this study was that the use of markerless motion capturing techniques could increase experiment efficiency and fasten data collecting. Additionally, it is beneficial to carry out non-invasive studies on volunteers, such as extensive water trials. These solutions are substantially less expensive than sensor-based approaches, which can greatly enhance the amount of data collected and, consequently, the findings. Second, these techniques can be used on projects that are still in the design phase. Since there are yet no definitive suggestions and decisions for how astronauts will conduct operations, this has a direct bearing on the architecture of lunar and Martian bases. For further experiments, the use of a single camera with LiDAR in underwater conditions can be assumed.
As a result of the difficulty in stabilizing the body, it is anticipated that the energy costs for the Moon's environment will be higher. However, this should still be validated.
There were still certain restrictions even if the results of the research on this subject were like those on fatigue and in good agreement with the methods used in the European ergonomics guidelines. These, in general, are connected to the scant number of motions examined. While repetitive tasks and other categories of static tasks can also be analyzed, this study concentrated on the investigation of just static and dynamic motions. This is due to the volume of video data generated and the difficulty of processing the information gathered from the three cameras used in the postural study.
As the further direction of this work, the total work and metabolic energy while performing the tasks can be calculated for simulated 1⁄6G and 1G. For that the trajectory of body segments and CoM trajectory of the whole body is necessary. The trajectory of body segments as well as the CoM of the body can be potentially found with markerless motion capture.
There are several limitations of this work. These, in general, are connected to the scant number of motions examined. While repetitive tasks and other categories of static tasks can also be analyzed, this study concentrated on the investigation of just static and dynamic motions. This is due to the volume of video data generated and the difficulty of processing the information gathered from the three cameras used in the postural study.
Another constraint is associated with the markerless motion capture model, OpenPose, which lacks intricacy in representing the participant's back, depicting it as a simple linear segment. Hence, further investigations should be conducted to examine the impact of the back with multiple keypoints on CoM displacement. Subsequent experiments in the realm of this research avenue could consider Martian gravity as a viable option. Also, the results should be verified in real-world settings (for instance, a parabolic flight campaign), as there may be errors related to markerless motion capture prediction capacities, and water density impact on the participant's motions.
Supplementary Materials
The following supporting information can be downloaded at: https://figshare.com/s/3ad227d2053821069fc9.
Funding
This research received no external funding.
Institutional Review Board Statement
The study was conducted in accordance with the Declaration of Helsinki and approved by the Ethics Committee) of Swiss Federal Institute of Technology (protocol code (HREC 024-2021 / 09.03.2021 Amendment to Initial Protocol HREC 001-2020/ 20.12.2019)).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study. Written informed consent has been obtained from the participants to publish this paper.
Data Availability Statement
The data presented in this study are available in https://figshare.com/s/3ad227d2053821069fc9.
Acknowledgments
The experiment's participants are gratefully acknowledged by the author. Thanks are extended to Mr. Yannick Delessert, Technical Specialist of Space Innovation, for aiding in experimental setup preparation. Prof. Dr. Volker Gass, the main author's supervisor and director of Space Innovation, played a pivotal role in study design, coordination. Prof. Dr. Claude Nicollier, an ESA astronaut, contributed space-related expertise to experiment planning. Gratitude is also owed to the Siebenthal family for granting access to the Swissub diving center.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hui, X.; Xiuyuan, Z.; Xuanliang, D.; Donghong, H.; Qin, L.; Hong, L.; Jingmin, L.; Wei, L. A research on the body center of mass of chinese adults. Int. J. Ind. Ergon. 1999, 23, 129–133. [Google Scholar] [CrossRef]
- Faber, G. S.; Chang, C. C.; Kingma, I.; Dennerlein, J. T. Lifting style and participant's sex do not affect optimal inertial sensor location for ambulatory assessment of trunk inclination. Journal of Biomechanics 2013, 46, 1027–1030. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.; Kim, W.; Zhang, Y.; Xiong, S. Development and Validation of a Wearable Inertial Sensors-Based Automated System for Assessing Work-Related Musculoskeletal Disorders in the Workspace. Int. J. Environ. Res. Public Heal. 2020, 17, 6050. [Google Scholar] [CrossRef] [PubMed]
- Conforti, I.; Mileti, I.; Del Prete, Z.; Palermo, E. Measuring Biomechanical Risk in Lifting Load Tasks Through Wearable System and Machine-Learning Approach. Sensors 2020, 20, 1557. [Google Scholar] [CrossRef] [PubMed]
- Ranavolo, A.; Varrecchia, T.; Rinaldi, M.; Silvetti, A.; Serrao, M.; Conforto, S.; Draicchio, F. Mechanical lifting energy consumption in work activities designed by means of the “revised NIOSH lifting equation”. Ind. Heal. 2017, 55, 444–454. [Google Scholar] [CrossRef]
- Mcelhaney, J.H.; Roberts, V.L.; Melvin, J.W.; Shelton, W.; Hammond, A.J. Biomechanics of Seat Belt Design. SAE Transactions 1972, 2873–2885. [Google Scholar] [CrossRef]
- Sonobe, M.; Inoue, Y. Center of Mass Estimation Using a Force Platform and Inertial Sensors for Balance Evaluation in Quiet Standing. Sensors 2023, 23, 4933. [Google Scholar] [CrossRef]
- Landekić, M.; Bačić, M.; Bakarić, M.; Šporčić, M.; Pandur, Z. Working Posture and the Center of Mass Assessment While Starting a Chainsaw: A Case Study among Forestry Workers in Croatia. Forests 2023, 14, 395. [Google Scholar] [CrossRef]
- Ranavolo, A.; Varrecchia, T.; Rinaldi, M.; Silvetti, A.; Serrao, M.; Conforto, S.; Draicchio, F. Mechanical lifting energy consumption in work activities designed by means of the “revised NIOSH lifting equation”. Ind. Heal. 2017, 55, 444–454. [Google Scholar] [CrossRef]
- Kazemi, Z.; Mazloumi, A.; Arjmand, N.; Keihani, A.; Karimi, Z.; Ghasemi, M.S.; Kordi, R. A Comprehensive Evaluation of Spine Kinematics, Kinetics, and Trunk Muscle Activities During Fatigue-Induced Repetitive Lifting. Hum. Factors: J. Hum. Factors Ergon. Soc. 2021, 64, 997–1012. [Google Scholar] [CrossRef]
- ERDMAN, W. S. Center of mass of the human body helps in analysis of balance and movement. MOJ Applied Bionics and Biomechanics 2018, 2, 144–148. [Google Scholar] [CrossRef]
- Sonobe, M.; Inoue, Y. Center of Mass Estimation Using a Force Platform and Inertial Sensors for Balance Evaluation in Quiet Standing. Sensors 2023, 23, 4933. [Google Scholar] [CrossRef] [PubMed]
- Pavei, G.; Seminati, E.; Cazzola, D.; Minetti, A.E. On the Estimation Accuracy of the 3D Body Center of Mass Trajectory during Human Locomotion: Inverse vs. Forward Dynamics. Front. Physiol. 2017, 8, 129. [Google Scholar] [CrossRef]
- McKinon, W.; Hartford, C.; Di Zio, L.; Van Schalkwyk, J.; Veliotes, D.; Hofmeyr, A.; Rogers, G. The agreement between reaction-board measurements and kinematic estimation of adult male human whole body centre of mass location during running. Physiol. Meas. 2004, 25, 1339–1354. [Google Scholar] [CrossRef] [PubMed]
- Dempster, W.T. Space Requirements of the Seated Operator, Geometrical, Kinematic, and Mechanical Aspects of the Body with Special Reference to the Limbs; Michigan State Univ East Lansing: East Lansing, MI, USA, 1955. [Google Scholar]
- Germanotta, M.; Mileti, I.; Conforti, I.; Del Prete, Z.; Aprile, I.; Palermo, E. Estimation of Human Center of Mass Position through the Inertial Sensors-Based Methods in Postural Tasks: An Accuracy Evaluation. Sensors 2021, 21, 601. [Google Scholar] [CrossRef] [PubMed]
- Richmond, S.B.; Fling, B.W.; Lee, H.; Peterson, D.S. The assessment of center of mass and center of pressure during quiet stance: Current applications and future directions. J. Biomech. 2021, 123, 110485. [Google Scholar] [CrossRef]
- Germanotta, M.; Mileti, I.; Conforti, I.; Del Prete, Z.; Aprile, I.; Palermo, E. Estimation of Human Center of Mass Position through the Inertial Sensors-Based Methods in Postural Tasks: An Accuracy Evaluation. Sensors 2021, 21, 601. [Google Scholar] [CrossRef]
- D’andrea, D.; Cucinotta, F.; Farroni, F.; Risitano, G.; Santonocito, D.; Scappaticci, L. Development of Machine Learning Algorithms for the Determination of the Centre of Mass. Symmetry 2021, 13, 401. [Google Scholar] [CrossRef]
- Corazza, S.; Andriacchi, T.P. Posturographic analysis through markerless motion capture without ground reaction forces measurement. J. Biomech. 2009, 42, 370–374. [Google Scholar] [CrossRef]
- Warburton, D. E.; Jamnik, V.; Bredin, S. S.; Shephard, R. J.; Gledhill, N. The 2020 Physical Activity Readiness Questionnaire for Everyone (PAR-Q+) and electronic Physical Activity Readiness Medical Examination (ePARmed-X+): 2020 PAR-Q+. The Health & Fitness Journal of Canada 2019, 12, 58–61. [Google Scholar] [CrossRef]
- Volkova, T.; Nicollier, C.; Gass, V. An Empirical and Subjective Model of Upper Extremity Fatigue Under Hypogravity. Front. Physiol. 2022, 13, 832214. [Google Scholar] [CrossRef]
- Volkova, T. Biomechanics at the workplace under hypogravity conditions; EPFL: Lausanne, Switzerland, 2022. [Google Scholar]
- Github CVLab. Available online: https://github.com/cvlab-epfl/multiview_calib (accessed on 1 June 2018).
- Simon, T.; Joo, H.; Matthews, I.; Sheikh, Y. Hand keypoint detection in single images using multiview bootstrapping. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21-26 July 2017. [Google Scholar]
- Cao, Z.; Simon, T.; Wei, S. E.; Sheikh, Y. Realtime multi-person 2d pose estimation using part affinity fields. In Proceedings of the IEEE conference on computer vision and pattern recognition, Honolulu, HI, USA, 21-26 July 2017; pp. 7291–7299. [Google Scholar]
- Wei, S. E.; Ramakrishna, V.; Kanade, T.; Sheikh, Y. Convolutional pose machines. computer vision and pattern recognition (cvpr). 2016 IEEE Conference on.
- Volkova, T.; Nicollier, C.; Gass, V. Markerless motion capture method application for investigation of joint profiles in the workplace under simulated hypogravity. 2021. [Google Scholar]
- Warburton, D. E.; Jamnik, V.; Bredin, S. S.; Shephard, R. J.; Gledhill, N. The 2020 physical activity readiness questionnaire for everyone (PAR-Q+) and electronic physical activity readiness medical examination (ePARmed-X+): 2020 PAR-Q+. The Health & Fitness Journal of Canada 2019, 12, 58–61. [Google Scholar] [CrossRef]
- Bachmann, R.; Sporri, J.; Fua, P.; Rhodin, H. Motion Capture from Pan-Tilt Cameras with Unknown Orientation. 2019, 308–317. [Google Scholar] [CrossRef]
- Harris, L. R. The Perception of Self-Orientation. In Oxford Research Encyclopedia of Psychology; 2022. [Google Scholar]
- Clark, T.K.; Young, L.R. A Case Study of Human Roll Tilt Perception in Hypogravity. Aerosp. Med. Hum. Perform. 2017, 88, 682–687. [Google Scholar] [CrossRef]
- STATISTICAL COHEN, J. Analysis Power. Current Directions in Psychological Science 1992, 1, 98–101. [Google Scholar] [CrossRef]
Figure 1.
Experimental setup. ROM – range of motion. Fw – weigh of the load.
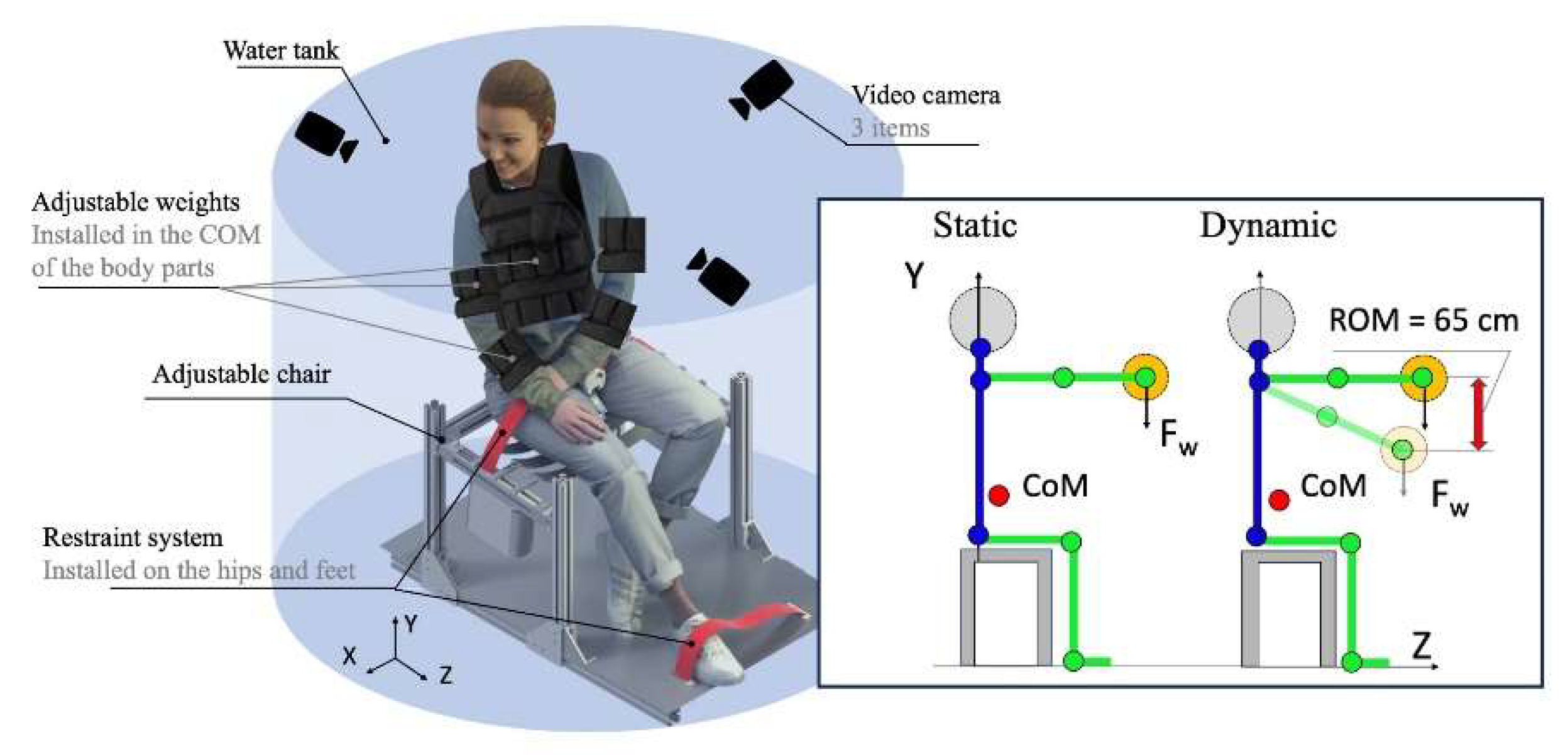
Figure 2.
CoM mean values for static and dynamic tasks [cm]: (a) CoM mean values on the Y axis for females; (b) CoM mean values on the Y axis for males; (c) CoM mean values on the Z axis for males; (d) CoM mean values on the Z axis for males. Gravity level is the transition from 1/6g to 1g of gravity. - delta between CoM shift under 1/6g and 1g. ***p<0.1; **p<0.05; *p<0.01. Experiment periods are presented by start, middle and finish of the endurance time (ET). CI, 95% - confidence interval.
Figure 2.
CoM mean values for static and dynamic tasks [cm]: (a) CoM mean values on the Y axis for females; (b) CoM mean values on the Y axis for males; (c) CoM mean values on the Z axis for males; (d) CoM mean values on the Z axis for males. Gravity level is the transition from 1/6g to 1g of gravity. - delta between CoM shift under 1/6g and 1g. ***p<0.1; **p<0.05; *p<0.01. Experiment periods are presented by start, middle and finish of the endurance time (ET). CI, 95% - confidence interval.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



