
Submitted:
17 August 2023
Posted:
18 August 2023
You are already at the latest version
Abstract
Over the past few years, there has been an increasing fascination with electric unmanned aerial vehicles (UAVs) because of their capacity to undertake demanding and perilous missions, while also delivering advantages in terms of flexibility, safety, and expenses. These UAVs are revolutionizing various public services, encompassing real-time surveillance, search and rescue operations, wildlife assessments, delivery services, wireless connectivity, and precise farming. To enhance their efficiency and duration, UAVs typically employ a hybrid power system. This system integrates diverse energy sources, such as fuel cells, batteries, solar cells, and supercapacitors. The selection of an appropriate hybrid power arrangement and the implementation of an effective energy management system are crucial for the successful functioning of advanced UAVs. This article specifically concentrates on UAV platforms powered by batteries, incorporating innovative technologies like in-flight recharging via laser beams and tethering. It provides an all-encompassing and evaluative examination of the current cutting-edge power supply configurations, with the objective of identifying deficiencies, presenting perspectives, and offering recommendations for future consideration in this domain.
Keywords:
UAV
; power supply
; battery swapping
; laser beam inflight charging
; tethered UAV
; batteries
; battery systems
; materials of batteries
1. Introduction
An unmanned aerial vehicle (UAV), also referred to as a flying robot or drone, possesses the ability to operate independently or under remote control for specific missions [1]. In recent times, UAVs have garnered considerable attention as a result of advancements in microprocessors [2,3] and artificial intelligence (AI) [4,5,6], sensors [7] as well as design [8,9,10,11,12,13,14,15] and manufacturing process [16,17,18,19,20] facilitating the creation of intelligent UAVs [21]. These technologically advanced UAVs offer a multitude of benefits, including cost efficiency and exceptional maneuverability, leading to their utilization in diverse military and civilian domains such as mine clearance, surveillance, delivery services, wireless connectivity, and agriculture [22,23]. It is crucial to highlight that UAVs have significant advantages over UGVs operational requirements [24], but UGVs are preferred for heavy-load missions due to their ability to carry substantial payloads [25]. Prominent multinational corporations are making substantial investments to enhance UAV capabilities and expand their application spectrum. Nowadays detection techniques improve safe and reliable UAV operations due to fault detection methods [26]. It is estimated that the market value of UAVs will reach a staggering US$127 billion by 2022 [27,28].
UAVs exhibit diverse features and configurations that are tailored to meet specific mission demands. Consequently, the literature provides multiple classifications that emphasize various parameters [29,30]. In terms of their physical structure, UAVs can be classified into distinct categories such as fixed-wing, rotary-wing, flapping-wing, hybrid, or balloon configurations. When considering their dimensions, UAVs come in different sizes, including mini, micro, and nano variations. The North Atlantic Treaty Organization (NATO) has established a classification system for UAVs, grouping them into three classes based on their maximum take-off weight (MTOW). Each class is further divided into subcategories, which take into account factors such as altitude and mission radius [31].
Electric UAVs are favoured for their advantageous characteristics, such as their reliability [32], reduced noise, disturbance rejection [33] and thermal signatures [34,35], high efficiency [5], absence of pollutant emissions, self-starting capabilities, and advanced control mechanisms that enable exceptional manoeuvrability. On the other hand, internal combustion engine (ICE)-based UAVs offer longer endurance due to the high power and energy densities of ICE [34]. However, they necessitate an auxiliary starting motor, involve more complex control demands [36], and generate high acoustic and thermal signatures. Some researchers [37,38] have explored hybrid architectures that combine electric motors with ICE to harness the advantages of both engine types. Nevertheless, the depletion of fossil fuels and the growing concerns regarding greenhouse gas (GHG) emissions have diminished the appeal of thermal engines, prompting the adoption of electric propulsion as a sustainable technology across various sectors, including transportation [39]. International policies and market trends that aim to phase out ICE vehicles [41] are expected to extend to UAVs in the foreseeable future, fostering the development of environmentally friendly devices. The shift away from ICE in UAVs, particularly for tasks that do not require extensive endurance, can be attributed to these factors.
Batteries serve as the primary source of electric power, but their flight durations in UAVs are limited vehicles by their low energy density and long lasting charging time [41] similar to all unmanned types of unmanned vehicles [42]. Furthermore, batteries may not offer the required power response for rapid manoeuvres due to their slow power dynamics. To address these limitations, supercapacitors present a suitable option for balancing the constraints imposed by batteries [43]. It should be noted that flight endurance can be improved through aerodynamic optimization during the UAV design phase [44]. Recent advancements in battery technology have slightly extended endurance to approximately 90 minutes using Lithium-Polymer (LiPo) batteries [45]. However, increasing the number of batteries becomes impractical due to weight and space limitations. To enhance UAV endurance, additional power sources must be employed to supplement batteries while adhering to weight and space constraints. In this regard, fuel cells offer a promising solution due to their high specific energy and near-instantaneous refuelling capability. They can typically achieve up to five times higher energy density than LiPo batteries, significantly enhancing the endurance of hybrid UAVs [46]. It is worth mentioning that many existing electric UAVs utilize fuel cells as their primary power source. Supercapacitors can also contribute to the power supply process due to their high power density and rapid response to peak power demands during UAV take-off and sudden manoeuvres. Fixed-wing UAVs have the advantage of incorporating solar cells and harnessing solar energy, which can reduce fuel consumption and greatly enhance endurance when combined with an energy storage system [47].
Therefore, in order to achieve longer endurance for UAVs, it becomes necessary to employ hybrid power supply systems that combine multiple power sources. The selection of the power supply system structure is crucial and depends not only on the characteristics of the power sources but also on the specific mission requirements of the UAV. To effectively manage the distribution of power among the onboard power sources and ensure optimal performance and efficiency for the intended mission, the implementation of an energy management system (EMS) is essential. An EMS typically consists of current and voltage sensors for monitoring power flow, converters for regulating the power source outputs, and a processing unit responsible for executing the adopted power management strategy. In addition to hybridization, there are alternative techniques available to extend the endurance of battery-based UAVs. These techniques include battery swapping [48,49], in-flight recharging using laser beams [50,51,52,53], and tethered UAVs [54,55,56]. Battery swapping involves replenishing depleted batteries of a UAV during its mission by utilizing ground stations located at specific locations. In-flight recharging utilizes a laser beam transmitted from a generator at a ground station to provide light power, enabling recharging without the need for landing. Tethered UAVs have the advantage of unlimited endurance as they receive a continuous power supply through connection lines that link the UAV to a ground-based power supply station.
Numerous review papers in the literature have extensively covered various aspects of UAVs. These include topics such as fuel storage and generation in small fixed-wing UAVs [41], the classification, advancements, and research trends in small-scale UAVs [56], the classification and design challenges of UAVs [29], path planning algorithms for fixed-wing UAVs [58], the guidance, navigation, and control of rotorcraft unmanned aircraft systems [62], and the modelling and control of quadrotors [60]. However, the specific focus of this review is centered on the energy aspect of UAVs. Its objective is to provide a comprehensive and critical assessment of the existing power supply structures [61] and their corresponding energy management systems. The review will not only identify any existing gaps but also provide valuable recommendations and prospects to guide future research in this field.
2. Unmanned Aerial Vehicle (UAV)
Prior to discussing the various power sources, it is important to provide a brief introduction to the two main types of UAVs, as illustrated in Figure 1. These types are rotary-wing UAVs and fixed-wing UAVs. Rotary-wing UAVs are characterized by a body structure that incorporates multiple rotors for propulsion. In contrast, fixed-wing UAVs resemble conventional aircraft, featuring fixed wings on either side of the body. Rotary-wing UAVs, also known as rotorcraft types, have gained popularity due to their ability to perform vertical take-off and landing, eliminating the need for a runway or launcher. They are capable of hovering in the air and exhibit exceptional agility, making them well-suited for precise manoeuvring tasks. However, the design of rotary-wing UAVs involves mechanical and electronic complexities, resulting in more intricate maintenance procedures, reduced operational time, and increased costs. Additionally, rotary-wing UAVs generally have lower payload capacities, higher power requirements, shorter operational durations, and even higher costs.
Fixed-wing UAVs present several advantages over rotary-wing UAVs. They possess a simpler structure, leading to easier maintenance and improved aerodynamics, resulting in reduced operational costs and increased flight time. The presence of fixed wings enables natural gliding capabilities, leading to lower power consumption. Additionally, fixed-wing UAVs can carry larger payloads over longer distances with less power, enhancing efficiency and cost-effectiveness. However, they do require a runway or launching device for take-off and landing, lack the hovering capability of rotary-wing UAVs, and tend to be larger and bulkier, compromising manoeuvrability. In addition to rotary-wing and fixed-wing UAVs, there exists a unique type of drone that combines the characteristics of both. This hybrid drone offers the stability and manoeuvrability of a rotary-wing drone along with the extended flight range of a fixed-wing drone. Importantly, it does not require a runway or additional equipment for take-off. Figure 2 provides an illustration of this combination drone. Each type of UAV—rotary-wing, fixed-wing, and hybrid—has its own applications that align with their respective advantages and disadvantages. Moreover, various power sources are employed in these drones.
The unmanned aerial vehicle (UAV) platform, depicted in Figure 2, comprises several essential components. Firstly, there is an onboard flight control system encompassing processing units that handle various tasks, including implementing guidance, navigation, and control (GNC) algorithms, collecting and analysing in-flight data, establishing communication with the ground station, and planning mission activities. Secondly, a propulsion system is integrated, which consists of multiple elements such as power supply sources, speed controllers, converters, energy management systems, motors, and propellers. These components work together to generate the required thrust and control the UAV's speed. Thirdly, the UAV is equipped with sensors that enable autonomous flight by providing crucial feedback and accurate measurements about the surrounding environment. Lastly, there is the payload, which includes additional equipment necessary for specific missions. This may comprise actuators, cameras, radar systems, or other specialized tools and instruments [57].
The propulsion system of a UAV plays a critical role as it consumes a significant portion of the onboard power. Its main purpose is to convert stored electrical energy into mechanical power, which propels the UAV through the motor-propeller system called a propulsion unit. In fact, the propulsion system can constitute more than half of the total weight of the UAV. Figure 3 provides a typical schematic diagram of a UAV propulsion system. The power from the onboard sources is supplied to the DC bus through unidirectional and bidirectional converters, allowing for battery charging and discharging. These converters enable control over the power flow and receive control signals from the Energy Management System (EMS), which manages power distribution. Among the various motor types utilized in small UAVs, the brushless DC (BLDC) motor is widely preferred. This motor type offers significant advantages, including high efficiency and power density [62], as well as features such as high speed, favourable torque characteristics, reliability, ease of control via Electronic Speed Controller - ESC, and long lifespan [63]. While induction motors are cost-effective and robust, they have limitations such as relatively low efficiency, cooling challenges, and lower torque output.
2.1. Unmanned Aerial Vehicle (UAV) Power Sources
Gas turbine engines have been widely used in aircraft propulsion systems due to their favourable power-to-weight ratio [64] and extended operational duration [29]. However, their optimal performance is limited to high power ranges [65], typically above 100 hp [66]. As a result, they are not suitable for small-scale UAV applications as they exhibit drawbacks such as inefficiency in fuel consumption, low overall efficiency, and high noise levels [67]. In contrast, the internal combustion engine (ICE) has traditionally served as the cornerstone of aircraft propulsion systems [68,69]. Compared to electric motors (EMs), ICEs offer advantages in terms of higher fuel energy and power densities, enabling longer flight times and larger payload capacities, which are crucial factors in flight missions. However, the multi-step energy production process in ICEs results in decreased system efficiency [54]. EMs are the preferred choice for UAVs due to their distinct characteristics, including minimal thermal and acoustic signatures, well-established electronic control systems, adaptability to automatic control, self-starting capabilities [36], cost-effectiveness, and higher reliability, which minimizes the risk of crashes caused by motor shutdown or failure. It should be noted that electric propulsion systems may encounter electronic speed controller (ESC) failures due to issues such as overheating and melting of the ESC casing. One potential solution to mitigate this problem is duplicating components [71].
A research paper [36] introduced a novel hybrid power propulsion prototype for Unmanned Aircraft Systems (UASs), aiming to combine the advantages of thermal and electric engines. Although simulation results showed a 13% improvement in endurance, the system was considered complex and not environmentally friendly. Other researchers [71], have also discussed hybrid parallel powertrain architectures using electric motors (EM) and internal combustion engines (ICE). However, the incorporation of ICE in UAVs is currently not the preferred solution due to limitations in fuel usage and endurance optimization. Therefore, this section will solely focus on electric propulsion-based UAVs and provide a critical evaluation of available electric power sources for UAV applications. Additionally, alternative supply strategies including swapping, laser-beam inflight recharging, and tethered UAVs will be discussed, particularly for UAVs relying on a single power source.
2.2. Battery – Based Supply Techniques
2.2.1. Battery Powered Unmanned Aerial Vehicle (UAV)
Battery power is widely utilized in small UAVs, especially quadrotors, as it offers simplicity and flexibility to the propulsion system [68]. Battery-based platforms, particularly those using lithium batteries such as LiPo batteries, are popular in hobbyist and commercial applications due to their flight time capabilities and cost-effectiveness. However, the endurance of small battery-powered UAVs is limited by the weight constraints of the battery pack, typically allowing for a maximum flight time of around 90 minutes using LiPo batteries [45]. LiPo batteries are preferred for small UAVs due to their lightweight nature and relatively high specific energy. In fact, LiPo batteries power the majority of micro aerial vehicles weighing less than 2 kg and with a length below 100 cm [29].
In selecting the appropriate battery technology for a given UAV application and mission, various characteristics such as specific energy, energy density, and specific power are taken into consideration. Table 1 provides detailed information on these characteristics for four different battery technologies, aiding in the battery technology selection process [43]. Additionally, in a specific study, different battery technologies were assessed based on the state of charge (SOC) for a particular mission, further emphasizing the importance of considering mission requirements when choosing battery technologies [56].
In a research conducted by Traub [73], the study focused on examining the factors that affect the performance of UAVs powered by batteries. Mathematical equations were developed to assess the UAV's range and endurance, taking into consideration the discharge conditions of the battery. However, it is important to acknowledge that this mathematical model has not yet undergone evaluations through simulations or experimental trials. One of the main challenges encountered by electric vehicles relying on battery power, including UAVs, is the limited autonomy they possess. Extensive efforts have been devoted to enhancing the performance of batteries in order to prolong operational duration and enable extended missions for electric vehicles. Despite the advancements made in battery technology, the specific energy of current batteries still poses limitations on the endurance and range of UAVs, which may not meet the requirements of numerous UAV applications. Additionally, improvements in energy density can have implications for the stability and safety levels [74]. To tackle these limitations, various solutions have been proposed in the existing body of literature. Fuel cells have emerged as a promising alternative due to their higher specific energy. Furthermore, numerous existing UAVs employ a hybrid configuration in their power supply, utilizing multiple energy sources such as batteries, fuel cells, solar cells, and supercapacitors.
2.2.2. Swapping Method Algorithm
The technique known as swapping is employed to recharge the batteries of a UAV while it is in the midst of its mission. This process involves the exchange of depleted batteries with fully charged ones, which can be done either autonomously or with human intervention. A specific type of swapping, called hot swapping, enables the immediate replacement of a depleted battery with a fully charged one, allowing the UAV to maintain power and continue its operation without interruption. Subsequently, the UAV can return to its assigned operational area and resume its tasks. By deploying multiple UAVs and coordinating their actions, a multi-agent system can ensure uninterrupted coverage of a specific area [33]. To successfully carry out a swapping operation, three important conditions must be fulfilled: (1) the presence of a ground recharge station where UAVs can land for battery charging or replacement, (2) a group of UAVs capable of continuous operation, and (3) a management system that facilitates cooperation among the swarm of UAVs. Figure 4 illustrates the techniques of swapping and hot swapping.
In the infrastructure network for UAVs, ground stations (GSs) are strategically placed in various locations such as cities or along connecting paths between cities. These GSs can be installed on different structures like cell towers, street lights, rooftops, power poles, or standalone pylons. As part of this infrastructure, battery swap stations are established, which consist of several components including ground electronics, an onboard circuit, a landing frame, and a contact mechanism. The batteries can be recharged through contact-based pathways or by utilizing inductive coupling. The docking platforms at the swap stations can be powered through a combination of power lines, large batteries, and solar cells, especially for stations located in remote areas.
There was also research that developed a multi-rotor aerial prototype specifically designed for long-duration missions using the swapping approach. The main goal of their study was to ensure uninterrupted operation of the airborne platform by monitoring the battery's state of charge (SOC). Their concept involved having three quadcopters in a rotating system, with one quadcopter always in a loiter position. When the SOC of a quadcopter drops below a predetermined threshold, it is replaced by another quadcopter, allowing the former to return to the ground station for battery charging. This cycle continues until all batteries are depleted or the mission is completed. The number of batteries required for sustainable operation depends on the discharge time and the duration needed for charging, rather than the number of UAVs. However, a larger number of batteries increases the system's resilience and reliability.
However, it is important to mention that the process of battery swapping and charging on the launch platform was not automated and still relied on human intervention. Additionally, the field test conducted in the study did not involve specific missions that required the use of sensors; instead, only static loitering was performed. In a separate study, researchers conducted an economic comparison of battery refilling and recharging platforms. They developed three stations based on axiomatic design principles, which allowed them to analyse and establish relationships between cost, complexity, and coverage levels [75]. This analysis provided valuable insights into the various factors associated with the implementation of battery refilling and recharging platforms.
The comparison between refilling and exchange stations has indicated that refilling stations are suitable for low coverage scenarios, while exchange stations are preferable when higher coverage levels are required. Suzuki et al. [76] conducted a comparison of battery charging and replacement systems using a Petri net model. The authors also discussed in detail the design options for autonomous swapping stations, aiming to achieve precise UAV positioning for swapping regardless of landing errors. However, it is worth noting that the estimated swap time in their study was approximately one minute, which is relatively long compared to other research. Moreover, the system was not fully operational as certain modules were not prototyped or tested. In a separate study [55], a ground recharge station was designed for battery-powered quadrotor helicopters, and an algorithm was implemented to reduce the battery recharge duration. The proposed autonomous charging process utilized safer electrical contacts and a balancer specifically designed for swarm applications. It is important to mention that, similar to the majority of the conducted studies, no experiments or flight tests were performed, and the study did not consider battery lifetime as a factor.
An automated refuelling station for small-scale UAVs was designed and implemented in a study [77] to enable long-duration autonomous missions with multi-agent UAV systems. The study developed a planning and learning algorithm and tested it in a 3-hour persistent flight involving three UAVs and over 100 battery swaps. The battery recharger mechanism used a linear sweeping motion, resulting in a simple and robust design. However, the cost of the system was not taken into account, and it should be noted that increasing the number of batteries and UAVs could potentially lead to a more expensive and complex system to manage. In a study by Swieringa et al. [78], a swapping system based on online algorithms for energy management, UAV health monitoring, and accurate landing was proposed. The system utilized a servo-based lift for battery swaps and placed the batteries onto a horizontally mounted hexagonal mat for charging. However, this swap mechanism introduced power losses in the UAVs. While individual tests were conducted for all the components, the entire system was not tested as a whole. In another study [79], an autonomous docking platform was designed using active infrared imaging. The system operated during both day and night and incorporated a camera and an infrared filter to achieve high precision landing.
In a study [71], a hardware platform was introduced featuring a dual-drum structure for efficient hot swapping of batteries. The platform included a buffer of 8 batteries, and experimental work provided insights into the average time required for battery swapping. A flight test was conducted, focusing on a search and track mission with communication constraints. However, the maximum operational time achieved for this mission using the developed station with 3 quadrotors was approximately 70 minutes. In a recent paper by Bocewicz et al. [80], the focus was on cyclically repeated missions such as aerial delivery services. They proposed the use of mobile battery swapping stations (MBSs) that would move to designated swapping points according to a preset timetable. UAVs could then join the appropriate station for battery replacement and cargo loading/unloading. The study addressed the optimization of the number of UAVs and the distance travelled by proposing a declarative model for routing UAVs and MBSs. However, it should be noted that this approach is applicable to only a limited range of missions, and the feasibility of mobile swapping stations may vary. The study primarily focused on the routing task, and no specific experiments related to swapping were conducted. Table 2 provides a critical analysis of the various swapping approaches discussed in the literature.
2.2.3. Laser-beam inflight recharging
The swapping approach has shown promise in extending the operational time of battery-powered UAVs by utilizing ground stations for battery replacement or recharging. However, an alternative approach that has been proposed is wireless recharging, as discussed in previous literature [49,81]. This method involves a ground station equipped with a primary power source, which generates a laser beam transmitted to the UAV while it is in flight. The UAV has an embedded optical receiver that converts the light into electricity, effectively powering the UAV. With wireless recharging, UAVs can remain airborne indefinitely without the need to land for battery recharging. When recharging is necessary, the UAV can access an aerial power link area to receive energy. This approach enhances safety by eliminating risks associated with take-off and landing. Laser transmitters can be strategically positioned on tall building rooftops to ensure an unobstructed laser beam path, or they can be installed on a mobile station, as depicted in Figure 5. This establishes a radiative link between the UAV and the nearest energy source, enabling fast power transfer. Companies like LaserMotive have developed working prototypes capable of transferring hundreds of watts of power [52]. Furthermore, experiments described in [51] have demonstrated the feasibility of this technique, achieving flight times of over 12 hours for a quadcopter. Wireless recharging offers the potential for continuous operation and extended flight durations, addressing limitations associated with battery capacity and swapping cycles. However, further research and development efforts are necessary to optimize the technology and overcome challenges related to power efficiency, safety, and scalability.
While the laser-beam inflight recharging approach offers potential benefits, it also introduces certain constraints and considerations that need to be taken into account. One such constraint is the need for UAVs to operate at reduced heights and within a limited area to maintain a reliable power transfer from the laser transmitter. This limitation is influenced by regulations such as those imposed by the FAA, which set a maximum altitude of 400 feet for small UAVs weighing less than 26 kg. Compliance with these regulations is crucial for safe and legal operations. Another consideration is that each UAV utilizing laser-beam inflight recharging requires its own dedicated laser transmitter. This can pose limitations on the number of UAVs that can be deployed in a given area, as multiple transmitters would be needed to support a larger fleet. Additionally, the individual transmitters can significantly increase the overall cost of implementing the laser-beam inflight recharging system [33]. Therefore, the scalability and economic feasibility of this approach should be carefully evaluated before widespread adoption. It is important to conduct a comprehensive assessment of the operational and regulatory aspects, as well as the economic implications, when considering the integration of laser-beam inflight recharging for UAVs. This evaluation should involve a careful balance between the benefits of extended flight time and the potential limitations and costs associated with this technology. By addressing these considerations, researchers and industry professionals can make informed decisions regarding the practical implementation of laser-beam inflight recharging in UAV operations.
2.2.4. Tethered UAVs
Tethered UAVs offer a unique solution for achieving unlimited autonomy by connecting to a power supply station through tethering lines. This eliminates the need for frequent recharging or battery replacement, enabling long-duration missions. Typically located on the ground, the power supply station continuously provides electricity to the UAV through the tethering lines, ensuring uninterrupted operation. Traditionally, copper wires have been used for the tethering lines of UAVs. However, there is a growing trend towards using fiber optic technology in this domain. Fiber optic cables allow for the transfer of kilowatts of power using high-intensity light, offering several advantages over copper wires. Optics-based power transfer reduces detectability by eliminating electrical signatures and significantly reduces both the payload weight of the UAV and the weight of the power lines compared to copper wires. In fact, fiber technology can reduce weight by up to eight times. Furthermore, power losses in fiber optic cables are minimal, making them more efficient for high-altitude operations.
Tethered UAVs have found applications in various fields. For instance, in maritime pollution monitoring, a tethered UAV can be deployed on a ship to detect oil spills in the sea, preventing contamination of the shoreline [55]. In data gathering applications, tethered UAVs equipped with sensors can be utilized to collect information in specific areas [56]. However, one limitation of tethered UAVs is the restricted operating area imposed by the length of the connecting cable, which prevents the UAV from flying far from its ground station. To overcome this limitation, in some cases, a moving vehicle is used to carry the prime power source, allowing the UAV to cover a larger area. In missions requiring extremely long endurance, such as monitoring nuclear power plants, tethered UAVs can be deployed to provide continuous aerial surveillance for days or even months, as long as the tethered cable provides a continuous power supply [53]. Prototypes of tethered UAVs have been designed and successfully demonstrated in outdoor environments, showcasing the feasibility and potential of this technology. The use of fibre optic cables in tethered UAV systems presents unique advantages in terms of weight reduction, power efficiency, and reduced detectability, making them an attractive option for extended-duration missions in various applications.
2.3. Fuel Cell Powered UAVs
Hydrogen-powered UAVs offer significant benefits compared to traditional battery-powered UAVs, particularly in terms of flight duration and refuelling time [82,83]. LiPo batteries, commonly used in UAVs, have a specific energy of up to 250 Wh/kg. In contrast, a fuel cell system with a compressed hydrogen tank can provide a specific energy of up to 1000 Wh/kg, allowing for much longer flight times [45,46]. This substantial increase in specific energy enables hydrogen-powered UAVs to fly for hours instead of just a few minutes.
Furthermore, refueling hydrogen-powered UAVs is nearly instantaneous compared to the time-consuming recharging process required for batteries. While batteries need a significant amount of time to recharge and replenish their energy, refuelling a hydrogen-powered UAV involves simply replacing the depleted hydrogen tank with a fully charged one. This enables quick turnaround times and continuous operation. These advantages make hydrogen-powered UAVs highly desirable for applications that require extended flight durations and rapid refuelling, such as long-range surveillance, mapping, and monitoring missions. However, it is essential to consider the infrastructure needed for hydrogen storage, transportation, and refuelling, as well as the safety considerations associated with handling hydrogen gas [84]. Proper safety protocols and infrastructure development are necessary to ensure the efficient and secure use of hydrogen-powered UAVs.

| Power supplying technique | Advantages | Limitations and drawbacks |
|---|---|---|
| Swapping | Hydrogen-powered UAVs offer the advantage of unlimited operating time, making them a viable option for long-range missions. Unlike battery-powered UAVs that require multiple battery packs or frequent recharging, hydrogen-powered UAVs rely on a single energy source, namely hydrogen fuel. This significantly reduces the weight and complexity of power management systems. With a hydrogen fuel cell system, the UAV can continuously generate electrical energy by combining hydrogen and oxygen, producing water vapor as a by-product. This continuous power generation eliminates the need for carrying multiple batteries or landing for recharging, allowing the UAV to operate for extended periods without interruption. The reduction in weight and complexity of power management systems brings several benefits. Firstly, the overall weight of the UAV is reduced, enabling increased payload capacity or longer flight durations. Secondly, the simplified power management system decreases the risk of component failures and improves overall reliability. Moreover, the reduced complexity also simplifies maintenance and servicing, contributing to more efficient operations. These advantages make hydrogen-powered UAVs particularly suitable for long-range missions where endurance and uninterrupted operation are crucial. Applications such as aerial surveillance, environmental monitoring, and remote sensing can greatly benefit from the extended operating time and reduced power management requirements of hydrogen-powered UAVs. However, it is important to consider the infrastructure for hydrogen storage, transportation, and refuelling, as well as safety considerations associated with handling hydrogen gas. Proper infrastructure development, safety protocols, and regulations are necessary to support the widespread adoption of hydrogen-powered UAVs and ensure their safe and efficient operation. |
The use of a ground station (GS) in the context of battery-powered UAVs can introduce certain challenges and considerations. While a GS can provide benefits such as battery charging or swapping capabilities, it also brings along some limitations that impact operational efficiency. One of the major concerns is the increased cost associated with deploying and maintaining a GS. As the number of batteries and UAVs in operation increases, the infrastructure and resources required for the GS also need to scale accordingly. This can result in higher costs for equipment, maintenance, and operational management. Another challenge is the coordination and cooperation between UAVs and the GS. Efficient communication and synchronization are essential for smooth operations. UAVs need to interact with the GS to initiate battery charging or swapping processes, which requires effective communication protocols and coordination algorithms. Failure in communication or synchronization can disrupt the operations and lead to inefficiencies. Autonomous swapping, which involves landing and battery changing operations, can introduce additional issues. Precise UAV positioning during landing is crucial to ensure safe and accurate battery swapping. Any errors or discrepancies in landing can affect the efficiency and reliability of the swapping process. Designing and implementing robust algorithms and mechanisms to achieve precise positioning and seamless battery changing operations is a complex task. Furthermore, autonomous swapping systems need to address concerns related to the compatibility of different UAV models and battery types. Ensuring that the swapping mechanism is compatible with a wide range of UAVs and batteries adds complexity to the system design and may require customization or adaptation for different configurations. Overall, while the concept of a ground station and autonomous swapping holds promise for extending UAV operational time, it is important to address the challenges associated with cost, cooperation between UAVs and the GS, and the technical issues related to landing and battery changing operations. Thorough planning, system design, and testing are necessary to achieve efficient and reliable autonomous swapping systems in practical applications. |
| Laser-beam charging |
The concept of wireless refuelling offers significant advantages for UAVs, including the potential for unlimited operating time and extended mission durations. With this approach, UAVs can receive a continuous supply of power without the need to land or swap batteries. This eliminates the limitations imposed by battery capacity and enables persistent missions. By utilizing a wireless power transfer system, UAVs can remain in air while receiving power from a ground station or an aerial power link area. This continuous power supply ensures that the UAVs can operate without interruption, effectively extending their operating range and mission capabilities. The use of a single energy source in wireless refuelling simplifies the power management system of the UAV. There is no need to manage multiple batteries or swap them out, reducing the weight and complexity associated with power management. This streamlined approach enhances the overall efficiency and reliability of the UAV system. Wireless refuelling also eliminates the need for UAVs to land, reducing the risks and challenges associated with take-off and landing operations. This improves safety and minimizes potential damage or wear and tear on the UAVs during landing and take-off manoeuvres. With unlimited operating time and extended range, wireless refuelling opens up possibilities for a wide range of applications. UAVs can be deployed for persistent surveillance, long-range mapping, remote sensing, and other missions that require continuous operation over extended periods. However, it's important to note that wireless refuelling is still an emerging technology, and further research and development are needed to optimize its efficiency, safety, and scalability. Challenges such as power efficiency, regulatory considerations, and infrastructure requirements must be addressed to fully realize the potential of wireless refuelling for UAVs. |
While wireless refuelling using laser beams offers potential benefits for UAVs, there are certain constraints and considerations that need to be addressed. One of these constraints is the necessity of a ground station (GS) equipped with a laser transmitter to provide power to the UAVs. This means that the UAVs need to operate within a certain range of the GS to maintain a reliable power transfer. This range limitation can restrict the operating area of the UAVs and may not be suitable for missions that require long-range coverage or operations in remote areas. Another constraint is related to the operating heights of the UAVs during laser beam refuelling. In order to maintain a consistent power transfer, the UAVs typically need to operate at reduced heights, which can be influenced by regulations and safety considerations. For instance, the Federal Aviation Administration (FAA) sets maximum altitude restrictions for small UAVs, limiting their operating height to 400 feet. Compliance with these regulations may further restrict the altitude range for UAVs using laser beam refuelling. Obstruction of the laser beam is another consideration. The laser beam used for refuelling needs a clear path between the GS and the UAV. This means that obstacles such as buildings, trees, or other structures can obstruct the beam, potentially interrupting the power transfer. Careful planning and positioning of the GS and the UAVs are required to minimize the risk of obstruction and ensure a reliable power supply. Furthermore, the range of laser beams used for wireless refuelling is typically limited compared to the range of traditional propulsion systems. This can impact the operational range of the UAVs, especially for missions that require long-distance coverage or operations in remote areas. Overall, while wireless refuelling using laser beams offers advantages such as extended flight duration and continuous operation, the necessity of a GS, constraints related to operating heights and beam obstruction, and reduced range need to be carefully considered when evaluating its suitability for specific UAV missions. Proper planning, regulatory compliance, and technological advancements are necessary to overcome these constraints and fully leverage the benefits of laser beam refuelling for UAVs. |
| Tethered UAVs |
Wireless refuelling using laser beams offers the potential for unlimited operating time for UAVs without the need to land. By utilizing a single energy source, such as a ground station equipped with a laser transmitter, the UAVs can receive a continuous and uninterrupted power supply while in flight. This eliminates the need for frequent battery changes or recharging, allowing for persistent operation and extended mission durations. In addition to providing power, wireless refuelling also enables safe and effective data transfer between the UAV and the ground station. Along with power, the laser beam can be used to transmit data and communication signals, ensuring seamless connectivity and information exchange between the UAV and the ground control. The ability to operate continuously and receive power and data transfer wirelessly offers several advantages. It enables UAVs to perform long-duration missions without interruption, making them suitable for applications that require persistent surveillance, monitoring, or data gathering. It also reduces the logistical challenges and risks associated with manual battery replacement or refuelling operations, as the UAVs can remain in air and operational throughout their mission. Moreover, wireless refuelling contributes to increased safety by eliminating the need for frequent take offs and landings, which can be risky manoeuvres for UAVs. The continuous operation and avoidance of landing procedures minimize the chances of accidents or incidents during mission execution. Overall, wireless refuelling with a single energy source provides UAVs with the capability for unlimited operating time, persistent operation, safe data transfer, and reduced reliance on ground-based support. These advantages make it an attractive solution for various applications where extended flight durations, continuous operation, and efficient data transfer are essential. |
While wireless refuelling offers the advantage of unlimited operating time and eliminates the need for landing or battery replacement, it does come with certain limitations. One of these limitations is the necessity of a ground station (GS) to provide the power supply or laser transmitter. The GS serves as the central hub for supplying power or transmitting the laser beam to the UAV in flight. Additionally, wireless refuelling methods often have constraints related to the operating area of the UAV. For example, laser beams used for power transfer may have limited range or be affected by obstructions, such as buildings or other objects that can block or interfere with the transmission. This can restrict the operational altitude and area of the UAV, requiring it to operate within a specific range from the GS to maintain a consistent power supply. Another concern with wireless refuelling is the potential for UAV damage in case of tethering loss. In some cases, UAVs may be tethered to the power source or laser transmitter through physical connections, such as cables or beams. If the tethering connection is lost or severed, it can lead to a sudden loss of power or disruption in the energy transfer, which may result in the UAV losing control or experiencing a sudden shutdown. This can potentially lead to damage to the UAV or compromise the mission's success. To mitigate these limitations and concerns, careful planning, system redundancy, and safety measures need to be implemented. This may involve the use of backup power sources or redundant laser transmitters to ensure uninterrupted operation and minimize the risk of power loss. Additionally, thorough risk assessments and safety protocols should be in place to prevent or mitigate potential damage to the UAV in case of tethering loss or system failures. Overall, while wireless refuelling offers advantages such as unlimited operating time and no landing requirements, it is important to consider the necessity of a GS, the limitations on operating area, and the potential risks associated with tethering loss. Proper planning, robust systems, and safety measures can help address these concerns and ensure the efficient and safe operation of UAVs using wireless refuelling methods. |
In the study [72], a comparison of various battery types (Li-ion, Ni-Cd, Ni-Mh) and fuel cells was conducted, considering criteria such as energy and power densities, discharging characteristics, temperature effects, efficiency, and endurance. However, it is important to note that flight tests were not conducted to evaluate the actual behavior, capabilities, and performance of these power sources in real flight conditions. Figure 6 in the study presents a comparison of specific power versus specific energy for batteries, fuel cells, and supercapacitors. It indicates that fuel cells demonstrate higher specific energy compared to other power sources, which makes them a promising option for achieving extended endurance in UAVs while maintaining a given weight [55]. Nevertheless, it should be acknowledged that fuel cells may have lower energy density compared to lithium batteries due to the additional volume required for hydrogen storage in the form of a tank.
In a separate study, the development of a UAV for mobile crane inspection was explored, with a focus on proton exchange membrane fuel cells [85] and lithium-ion batteries [86]. The research involved an economic analysis and a life cycle assessment to compare the two power sources. One of the main conclusions drawn from the study was that, from a commercial standpoint, fuel cells, being a niche product, tend to be more expensive compared to lithium-ion batteries. This fact emphasizes the trade-offs between fuel cells and batteries in terms of specific energy, energy density, cost, and commercial viability. The selection of the appropriate power source for UAV applications relies on specific requirements, mission profiles, and considerations such as flight endurance, weight limitations, cost constraints, and the availability of infrastructure.
2.3.1. Fuel cells efficiency issue
The process of electricity generation from fuel cells involves certain elements. Fuel cells can achieve an efficiency level of up to 60% [72]. However, this efficiency is lower compared to lithium batteries, which can exceed 90%. One of the reasons for the lower efficiency of fuel cells is the presence of auxiliary equipment required for the operation of the fuel cell stack. These auxiliary components add complexity to the system and can contribute to energy losses, thus reducing overall efficiency [77]. Additionally, the onboard hydrogen generation system, which is necessary for fuel cell operation, can also introduce complexity and potentially decrease efficiency. While fuel cells may have lower efficiency compared to lithium batteries, they offer advantages in terms of specific energy and longer operational duration. The choice between fuel cells and batteries depends on specific application requirements, taking into account factors such as flight endurance, weight limitations, cost considerations, and the availability of infrastructure.
2.3.2. Fuel storage
Hydrogen has a low density at standard temperature and pressure, which poses a challenge for storing a sufficient amount of fuel for UAV missions. The low density means that hydrogen tanks need to be bulky to accommodate the required amount of fuel, which can impact the size and weight of the UAV. In addition to the size and weight considerations, safety is also a significant concern when it comes to storing hydrogen. Pure hydrogen cannot be stored under extremely high pressure and low temperature due to safety reasons. Therefore, alternative techniques are employed for hydrogen storage in UAVs.
The three main techniques currently used for hydrogen storage in UAVs are as follows:
- Compressed hydrogen gas: Hydrogen gas is stored in tanks under high pressure. This method allows for easier storage and refuelling compared to other techniques. However, it requires high-pressure tanks, which can add weight and volume to the UAV.
- Liquid hydrogen: Hydrogen is stored in a liquid state at very low temperatures. This method provides a higher energy density compared to compressed gas storage. However, it requires specialized cryogenic storage systems and insulation, which can add complexity and weight to the UAV.
- Chemical hydrogen generation: Hydrogen is generated onboard the UAV through chemical reactions, such as the reaction between a metal hydride and water. This method offers the advantage of generating hydrogen as needed, eliminating the need for storing large quantities of hydrogen. However, it requires additional components and can have limitations in terms of hydrogen generation rate.
Table 4 in the referenced study likely provide a detailed analysis of the advantages and drawbacks of each hydrogen storage technique in UAV applications, allowing for a comprehensive comparison and evaluation of the different options.
2.4. Hybrid Power Sources (Fuel cell and battery)
Fuel cells face limitations when used as the sole power source for UAVs. Their time constant is relatively long, typically in the range of seconds, due to the requirements of fuel and air supply facilitated by pumps, valves, and compressors. This sluggish response is primarily attributed to the mechanical characteristics of the pumps, flow delay, thermodynamic properties, and the effect of capacitance [87]. Consequently, when there are significant fluctuations in current demand, there is a potential risk of fuel shortage, which can negatively impact the fuel cell system's lifetime, reliability, and efficiency [88]. To tackle these challenges, researchers have explored the integration of fuel cells with batteries to form hybrid power supply systems, which have emerged as a promising solution. By harnessing the strengths of both power sources and mitigating their weaknesses, hybrid systems can deliver enhanced performance and efficiency for UAV propulsion [46,89,90]. The battery can swiftly provide power for sudden changes in demand, while the fuel cell can supply sustained power for extended durations. This approach enables superior power management, heightened system dependability, and overall improved UAV performance.
In a hybrid UAV propulsion system, the battery plays a crucial role in supplying power during high-demand maneuvers like take-off and climbing. Its higher power density, quicker response time, and greater efficiency make it well-suited for such tasks compared to a fuel cell. On the other hand, the fuel cell takes over as the primary power source during cruise or descent phases, providing sustained power and also recharging the battery to maintain its state of charge (SOC) above a certain threshold. To evaluate the performance of hybrid UAV propulsion systems, researchers have employed hardware-in-the-loop (HIL) simulations, as demonstrated in studies like Gong et al.'s [91]. These simulations analyse the behaviour of each power source in various test scenarios, considering factors such as endurance and hydrogen consumption.
The role of the battery in the hybrid system has been extensively considered in studies such as [57]. These experiments have specifically focused on analysing the battery's performance during different flight mission phases and under varying demands. Additionally, [74] provides a comprehensive characterization of the hybrid propulsion system using diverse mission profiles and speeds. However, it should be noted that these studies mainly concentrated on passive power splitting methods and did not delve into the development of an active energy management strategy. The implementation of an energy management strategy is a crucial aspect of hybrid UAV propulsion systems. It involves actively regulating the power flow between the fuel cell and battery to optimize the overall performance, efficiency, and longevity of the system. This strategy determines the appropriate utilization of each power source based on the prevailing flight conditions, load requirements, and the battery's state of charge. By employing intelligent power management algorithms, the hybrid system can achieve enhanced efficiency and prolong the UAVs mission endurance.
| Type | Energy density (Wh/kg) |
Power density (W/kg) |
Cycle life (Times) |
Efficiency (%) |
|---|---|---|---|---|
| Lead-acid battery | 30-40 | 200-300 | 300-400 | 75 |
| Ni-MH battery | 60-80 | 800-1500 | 1000 | 75 |
| Li-ion battery | 100-120 | 600-2000 | 1000 | 90 |
| Supercapacitor | 4-15 | 1000-10,0000 | 100,000 | 85-98 |
Table 6.
Batteries and supercapacitor advantages and disadvantages.
| Type | Advantages | Disadvantages |
|---|---|---|
| Lead-acid battery | Affordable, rapid discharging rate, and high recyclability. | Inadequate performance in low temperature conditions. |
| Ni-MH battery | High energy density, quick charging and discharging, and extended lifespan. | Pronounced self-discharge rate, necessity for cooling system, and higher manufacturing expenses. |
| Li-ion battery | Elevated voltage, superior energy density, lightweight, durable cycle life, minimal self-discharge, absence of memory effect, and eco-friendly. | Reduced lifespan in high-temperature environments, susceptibility to overcharging and over-discharging, and stringent security requirements. |
| Supercapacitor | Swift charging and discharging capabilities, absence of pollution, and remarkably | Limited energy density. |
Table 7.
Comparison of power supply configurations.
| Energy sources |
Architecture | Advantages | Limitations and drawbacks |
|---|---|---|---|
| Thermal energy |
Gas turbine engine | Impressive ratio of power to weight, coupled with extended duration of operation. | Extremely poor fuel efficiency and elevated noise levels. |
| ICE | Exceptionally high power and energy densities, extended endurance, and significant payload range. | Decreased efficiency, thermal and acoustic signatures, greenhouse gas emissions, and high fuel costs. | |
| One electrical source |
Battery | Significant energy density and storage (rather than generation), resulting in a rapid response to power demand. | Limited power density, decreased endurance, and prolonged recharging time with the presence of "memory effect" in certain battery types. To enhance autonomy, additional batteries need to be added, leading to increased weight and cost. |
| Fuel cell | Significant energy density, instant refuelling without the presence of a "memory effect," allowing for increased autonomy by using more fuel within the same stack, resulting in weight reduction. | Due to the process of energy generation, there is a slower response to power demand in fuel cells. Additionally, auxiliary equipment such as compressors and regulators are required for their operation. Challenges related to the lack of hydrogen distribution infrastructure, issues with hydrogen storage, safety concerns, and the high cost of hydrogen production are also present. | |
| Hybrid power supply |
Fuel cell and Battery |
The high energy and power densities of the hybrid power supply result in increased endurance and faster response time. This allows for efficient energy generation and storage, enhancing the overall performance of the system. | The use of a hybrid power supply system leads to an increase in weight, as additional components such as controllers and converters are required to manage the system. This introduces added complexity to the UAV, further contributing to the overall weight. |
| Fuel cell, Battery, and solar cells | The inclusion of an additional energy source in a hybrid power supply system results in improved endurance for the UAV. This extra source provides clean and readily available energy, which leads to a decrease in energy costs and saves on hydrogen usage. | Large UAV wings are necessary for the implementation of a hybrid power supply system. However, this configuration is not suitable for rotary-wing UAVs. Additionally, an energy storage device is required to store and manage the energy generated by the system. The hybrid system also necessitates the use of an Energy Management System (EMS) and Maximum Power Point Tracking (MPPT) to optimize the power flow and ensure efficient operation. | |
| Fuel cell, Battery, and supercapacitor | The hybrid system consisting of a fuel cell, battery, and supercapacitor offers several advantages. It provides very high power density, enabling efficient and rapid charging. It also contributes to reduced weight and minimized fluctuations in the direct current (DC) bus. The system exhibits a very long lifetime, thanks to its reduced internal resistance, and experiences minimal heat loss. These features make the hybrid system highly desirable for various applications, ensuring optimal performance and reliability. | The integration of an Energy Management System (EMS) is essential in the hybrid system, which includes a fuel cell, battery, and supercapacitor. The EMS plays a crucial role in coordinating and regulating the power flow between these components. It ensures efficient utilization of the energy sources, manages charging and discharging processes, and maintains the stability of the system. Additionally, the voltage regulation of the supercapacitor is necessary to ensure its proper operation and prevent any voltage-related issues. The EMS and supercapacitor voltage regulation contribute to the overall performance and reliability of the hybrid system. |
3. Conclusion
The primary focus of this research paper is to examine and evaluate the energy aspects of onboard propulsion systems in UAV platforms. By conducting a comprehensive review and analysis of different power supply architectures and energy management strategies, the objective is to establish a foundation for the development of high-performance UAV propulsion systems. This assessment aims to facilitate the assessment of trade-offs and considerations when selecting suitable power sources for UAVs.
Relying solely on a single power source can be limiting for UAVs, as different power sources exhibit diverse performance characteristics under varying operating conditions. Therefore, the integration of hybrid power sources with complementary capabilities is increasingly recognized as a standard approach for designing UAV electric power systems. The selection and sizing of hybrid power sources depend on the specific mission requirements and associated weight/duration constraints of the UAV.
By comparing and analysing various power supply architectures and energy management strategies, this research paper aims to contribute to the advancement of efficient and reliable UAV propulsion systems. The objective is to enable UAVs to operate optimally in different mission scenarios, enhance overall performance, extend mission durations, and improve the adaptability of the propulsion system to changing operating conditions.
Therefore, it is highlighted with some key points regarding the advantages and limitations of different power sources for UAV propulsion systems. Combustion engines, although robust, are typically heavier and more commonly used in fixed-wing UAVs. On the other hand, fuel cells (FCs) and batteries, such as lithium-polymer (Li-Po) batteries, offer longer flight times and greater manoeuvrability. However, they may struggle to supply peak current when required and can deplete their energy rapidly. Hybrid systems, which combine multiple power sources, offer significant advantages over single-source systems. By leveraging the specific strengths of each power source, hybrid systems can address issues such as prolonged charging times, short flight durations, and limited peak power supply. Supercapacitors (SCs) are commonly used in hybrid systems due to their ability to overcome the drawbacks of other power sources. SCs have high energy density, short recharge periods, and virtually unlimited cycle life, making them a promising replacement for Li-Po batteries in hybrid systems.
Hydrogen fuel cells, often incorporating Li-Po batteries, can be considered a type of hybrid system. However, Li-Po batteries present several disadvantages in drone applications, including low energy density, short flight times, long recharge times, environmental hazards, and limited lifespan compared to other power sources. SCs, with their high energy density, short recharge periods, and long cycle life, offer a potential solution as a replacement for Li-Po batteries in hybrid systems. Further research is necessary to evaluate the impact of SCs on the effectiveness of fuel cell systems in drone applications. Overall, the implementation of hybrid systems with SCs shows promise in improving the flight time and efficiency of UAVs. To truly advance current systems, hybrid systems need to be comparable in weight and size to existing drones while providing enhanced performance and addressing the limitations of single-source power systems. Further research and development are required to optimize the integration and performance of hybrid power systems in UAV applications.
Author Contributions
Conceptualization, Y.N.S., W.G.; writing—original draft preparation, Y.N.S.; writing—review and editing, Y.N.S., M.T.H.S., F.S.S., M.N. W.G, S.S. and A.L.; visualization, Y.N.S.; supervision, M.T.H.S. and A.L.; project administration, F.S.S, M.N, W.G. and A.L.; funding acquisition, M.T.H.S., M.N, W.G. and A.L. All authors have read and agreed to the published version of the manuscript.
Funding
The authors would like to thank Ministry of Higher Education, Malaysia for the financial support through Higher Institution Centre of Excellence (HICoE) research grant (Vot number 6369119). The research was financially supported as a statutory work of the Poznan University of Technology (No. 0214/SBAD/0241). This research was partially financed by the Ministry of Science and Higher Education of Poland with allocation to the Faculty of Mechanical Engineering, Bialystok University of Technology for the WZ/WM-IIM/5/2023 academic project in the mechanical engineering discipline.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data sharing does not apply to this article as no new data were created or analyzed in this study.
Acknowledgments
The authors would like to thank the Department of Aerospace Engineering, Faculty of Engineering, Universiti Putra Malaysia, and Laboratory of Biocomposite Technology, Institute of Tropical Forestry and Forest Product (INTROP- HICOE), Universiti Putra Malaysia for the close collaboration in this research.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhai Q, Meng K, Dong ZY, and Ma J. “Modeling and Analysis of Lithium Battery Operations in Spot and Frequency Regulation Service Markets in Australia Electricity Market.” IEEE Trans Ind Informatics. (2017);13(5):2576–86. [CrossRef]
- Horla, D., Giernacki, W., Báča, T. et al. AL-TUNE: A Family of Methods to Effectively Tune UAV Controllers in In-flight Conditions. J Intell Robot Syst, 2021, 103, 5. [CrossRef]
- Tsmots, I.; Teslyuk, V.; Łukaszewicz, A.; Lukashchuk, Y.; Kazymyra, I.; Holovatyy, A.; Opotyak, Y. An Approach to the Implementation of a Neural Network for Cryptographic Protection of Data Transmission at UAV. Drones 2023, 7, 507. https://doi.org/10.3390/drones7080507. [CrossRef]
- Holovatyy A., Łukaszewicz A., Teslyuk V., Ripak N. (2022): Development of AC Voltage Stabilizer with Microcontroller-Based Control System In: 2022 IEEE 17th International Conference on Computer Sciences and Information Technologies (CSIT), 2022, Institute of Electrical and Electronics Engineers, pp.527-530. [CrossRef]
- Pytka J., Budzynski P., Tomilo P., Laskowski J., Michalowska J., Gnapowski E., Blazejczak D., Lukaszewicz A. (2021): IMUMETER - AI-based sensor for airplane motion measurements 2021 IEEE International Workshop on Metrology for AeroSpace, MetroAeroSpace 2021 - Proceedings, art. no. 9511767, pp. 692-697. [CrossRef]
- Pytka, J.; Budzyński, P.; Łyszczyk, T.; Józwik, J.; Michałowska, J.; Tofil, A.; Błażejczak, D.; Laskowski, J. Determining wheel forces and moments on aircraft landing gear with a dynamometer sensor. Sensors 2020, 20, 227. https://doi.org/10.3390/s20010227. [CrossRef]
- Chandran, N.K.; Sultan, M.T.H.; Łukaszewicz, A.; Shahar, F.S.; Holovatyy, A.; Giernacki, W. Review on Type of Sensors and Detection Method of Anti-Collision System of Unmanned Aerial Vehicle. Sensors 2023, 23, 6810. https://doi.org/10.3390/s23156810. [CrossRef]
- Łukaszewicz, A.; Szafran, K.; Józwik, J. CAx techniques used in UAV design process. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 95–98. https://doi.org/10.1109/MetroAeroSpace48742.2020.9160091. [CrossRef]
- Kotarski, D.; Piljek, P.; Pranjić, M.; Grlj, C.G.; Kasać, J. A Modular Multirotor Unmanned Aerial Vehicle Design Approach for Development of an Engineering Education Platform. Sensors 2021, 21, 2737. https://doi.org/10.3390/s21082737. [CrossRef]
- Krznar, M.; Piljek, P.; Kotarski, D.; Pavković, D. Modeling, Control System Design and Preliminary Experimental Verification of a Hybrid Power Unit Suitable for Multirotor UAVs. Energies 2021, 14, 2669. https://doi.org/10.3390/en14092669. [CrossRef]
- Turk, I.; Ozbek, E.; Ekici, S.; Karakoc, T.H. A conceptual design of a solar powered UAV and assessment for continental climate flight conditions. Int. J. Green Energy 2022, 19, 638–648. https://doi.org/10.1080/15435075.2021.1954008. [CrossRef]
- Rodríguez-Sevillano, Á.A.; Casati-Calzada, M.J.; Bardera-Mora, R.; Nieto-Centenero, J.; Matías-García, J.C.; Barroso-Barderas, E. Rapid Parametric CAx Tools for Modelling Morphing Wings of Micro Air Vehicles (MAVs). Aerospace 2023, 10, 467. https://doi.org/10.3390/aerospace10050467. [CrossRef]
- Ozbek, E.; Ekici, S.; Karakoc, T.H. Unleashing the Potential of Morphing Wings: A Novel Cost Effective Morphing Method for UAV Surfaces, Rear Spar Articulated Wing Camber. Drones 2023, 7, 379. https://doi.org/10.3390/drones7060379. [CrossRef]
- Kotarski, D.; Piljek, P.; Pranjić, M.; Kasać, J. Concept of a Modular Multirotor Heavy Lift Unmanned Aerial Vehicle Platform. Aerospace 2023, 10, 528. https://doi.org/10.3390/aerospace10060528. [CrossRef]
- Miatliuk, K.; Lukaszewicz, A.; Siemieniako, F. Coordination method in design of forming operations of hierarchical solid objects. 2008 International Conference on Control, Automation and Systems, ICCAS 2008, art. no. 4694220, pp. 2724 - 2727. https://doi.org/10.1109/ICCAS.2008.4694220. [CrossRef]
- Grodzki, W.; Łukaszewicz, A. Design and manufacture of unmanned aerial vehicles (UAV) wing structure using composite materials. Mater. Werkst. 2015, 46, 269–278. https://doi.org/10.1002/mawe.201500351. [CrossRef]
- Parparita, M.; Bere, P.; Józwik, J.; Biruk-Urban, K. Design and Manufacturing of a Small Sized UAV Wing. 2023 IEEE 10th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Milan, Italy, 2023, 187-192. https://doi.org/10.1109/MetroAeroSpace57412.2023.10190041. [CrossRef]
- Leleń, M.; Józwik; J. Analysis of technological parameters of hydroabrasive cutting of multilayer aerospace structures of aluminium alloy - carbon composite type. 2023 IEEE 10th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Milan, Italy, 2023, 638-643, https://doi.org/10.1109/MetroAeroSpace57412.2023.10189961. [CrossRef]
- Šančić, T.; Brčić, M.; Kotarski, D.; Łukaszewicz, A. Experimental Characterization of Composite-Printed Materials for the Production of Multirotor UAV Airframe Parts. Materials 2023, 16, 5060. https://doi.org/10.3390/ma16145060. [CrossRef]
- Tomiło, P.; Pytka, J.; Józwik, J.; Gnapowski, E.; Muszyński T.; Łukaszewicz, A. Latent Neural Network For `Recognition of Annomalies in 3D-Print of a Scale Model for Wind Tunnel Measurements. 2023 IEEE 10th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Milan, Italy, 2023, 688-692, https://doi.org/10.1109/MetroAeroSpace57412.2023.10190049. [CrossRef]
- Alwateer M, Loke SW, and Fernando N. “Enabling drone services: Drone crowdsourcing and drone scripting.” IEEE Access. (019);7:110035–49. [CrossRef]
- Pan ZF, An L, and Wen CY. “Recent advances in fuel cells based propulsion systems for unmanned aerial vehicles.” Appl Energy. (2019);240:473–85. [CrossRef]
- Berger, G.S.; Teixeira, M.; Cantieri, A.; Lima, J.; Pereira, A.I.; Valente, A.; Castro, G.G.R.d.; Pinto, M.F. Cooperative Heterogeneous Robots for Autonomous Insects Trap Monitoring System in a Precision Agriculture Scenario. Agriculture 2023, 13, 239. https://doi.org/10.3390/agriculture13020239. [CrossRef]
- Nowakowski M.; Kurylo, J. Usability of Perception Sensors to Determine the Obstacles of Unmanned Ground Vehicles Operating in Off-Road Environments. Appl. Sci. 2023, 13, 4892. https://doi.org/10.3390/app13084892. [CrossRef]
- Silarski, M.; Nowakowski, M. Performance of the SABAT Neutron-Based Explosives Detector Integrated with an Unmanned Ground Vehicle: A Simulation Study. Sensors 2022, 22, 9996. https://doi.org/10.3390/s22249996. [CrossRef]
- Puchalski R, Giernacki W. UAV Fault Detection Methods, State-of-the-Art. Drones. 2022; 6(11):330. [CrossRef]
- Alwateer M, Loke SW, and Zuchowicz AM. “Drone services: issues in drones for location-based services from human-drone interaction to information processing.” J Locat Based Serv. (2019);13(2):94–127. [CrossRef]
- Tang L and Shao G. “Drone remote sensing for forestry research and practices.” J For Res. (2015);26(4):791–7. [CrossRef]
- RS Components. Xu Y, Yang Y, Jiang H, Zhang Y, and Xu Y. “Energy-efficient multi-UAV coverage deployment in UAV networks: A game-theoretic framework.” China Commun. (2018);15(10):194–209.
- Claesson A, Svensson L, Nordberg P, Ringh M, Rosenqvist M, Djarv T, Samuelsson J, Hernborg O, Dahlbom P, Jansson A, and Hollenberg J. “Claesson et al. - 2017 - Drones may be used to save lives in out of hospital cardiac arrest due to drowning.pdf.” Resuscitation. (2017);114:152–6. [CrossRef]
- Loke SW, Alwateer M, and Abeysinghe Achchige Don VSA. “Virtual space boxes and drone-as-reference-station localisation for drone services: An approach based on signal strengths.” DroNet 2016 - Proc 2nd Work Micro Aer Veh Networks, Syst Appl Civ Use, co-located with MobiSys 2016. (2016);45–8.
- Shukla A, Xiaoqian H, and Karki H. “Autonomous tracking and navigation controller for an unmanned aerial vehicle based on visual data for inspection of oil and gas pipelines.” Int Conf Control Autom Syst. (2016);0:194–200. [CrossRef]
- Michałowska J., Tofil A., Józwik J., Pytka J., Legutko S., Siemiątkowski Z., Łukaszewicz A. (2019): Monitoring the risk of the electric component imposed on a pilot during light aircraft operations in a high-frequency electromagnetic field, Sensors (Switzerland), Vol. 19 (24), art. no. 5537. [CrossRef]
- Bacco M, Berton A, Ferro E, Gennaro C, Gotta A, Matteoli S, Paonessa F, Ruggeri M, Virone G, and Zanella A. “Smart farming: Opportunities, challenges and technology enablers.” 2018 IoT Vert Top Summit Agric - Tuscany, IOT Tuscany 2018. (2018);1–6. [CrossRef]
- Thakar, PS, Markana, A, Miyani, PB. Robust temperature tracking and estimation for resistive heater circuit board with implementation. Adv Control Appl. 2023; 5( 2):e147. https://doi.org/10.1002/adc2.147. [CrossRef]
- Ding G, Wu Q, Zhang L, Lin Y, Tsiftsis TA, and Yao YD. “An Amateur Drone Surveillance System Based on the Cognitive Internet of Things.” IEEE Commun Mag. (2018);56(1):29–35. [CrossRef]
- Yoo S, Kim K, Jung J, Chung AY, Lee J, Lee SK, Lee HK, and Kim H. “A multi-drone platform for empowering drones’ teamwork.” In: Proceedings of the Annual International Conference on Mobile Computing and Networking, MOBICOM. 2015. p. 275–7.
- Lee J, Kim K, Yoo S, Chung AY, Lee JY, Park SJ, and Kim H. “Constructing a reliable and fast recoverable network for drones.” 2016 IEEE Int Conf Commun ICC 2016. (2016). [CrossRef]
- Zhou J, Zhang B, Xiao W, Qiu D, and Chen Y. “Nonlinear Parity-Time-Symmetric Model for Constant Efficiency Wireless Power Transfer: Application to a Drone-in-Flight Wireless Charging Platform.” IEEE Trans Ind Electron. (2019);66(5):4097–107. [CrossRef]
- Lu M, Bagheri M, James AP, and Phung T. “Wireless Charging Techniques for UAVs: A Review, Reconceptualization, and Extension.” IEEE Access. (2018);6:29865–84. [CrossRef]
- Sato A and Naknishi H. “Observation and measurement in disaster areas using industrial use unmanned helicopters.” In: 12th IEEE International Symposium on Safety, Security and Rescue Robotics, SSRR 2014 - Symposium Proceedings. 2014. [CrossRef]
- Mikołajczyk, T., Mikołajewski, D., Kłodowski, A., Łukaszewicz, A., Mikołajewska, E., Paczkowski, T., Macko, M., Skornia, M. (2023). Energy Sources of Mobile Robot Power Systems: A Systematic Review and Comparison of Efficiency. Applied Sciences-Basel, 13, 1–24. [CrossRef]
- Afridrones Aviation CC. “Afridrones” [Internet]. 2020 [cited 2023 Jun 15]. Available from: https://afridrones.com/home_190315/.
- Vanchiappan A, Joe G, Yun-Sung L, and Srinivasan M. “Insertion-type electrodes for nonaqueous Li-ion capacitors.” Chem Rev. (2014);114(23):11619–35. [CrossRef]
- Ci S, Lin N, and Wu D. “Reconfigurable Battery Techniques and Systems: A Survey.” IEEE Access. (2016);4:1175–89. [CrossRef]
- Rajashekara K. “Present status and future trends in electric vehicle propulsion technologies.” IEEE J Emerg Sel Top Power Electron. (2013);1(1):3–10. [CrossRef]
- Vidal C, Gross O, Gu R, Kollmeyer P, and Emadi A. “XEV Li-Ion Battery Low-Temperature Effects-Review.” IEEE Trans Veh Technol. (2019);68(5):4560–72. [CrossRef]
- Wagner FT, Lakshmanan B, and Mathias MF. “Electrochemistry and the future of the automobile.” In: 11AIChE - 2011 AIChE Annual Meeting, Conference Proceedings. 2011. [CrossRef]
- Karden E, Ploumen S, Fricke B, Miller T, and Snyder K. “Energy storage devices for future hybrid electric vehicles.” J Power Sources. (2007);168(1 SPEC. ISS.):2–11. [CrossRef]
- Kim T, Qiao W, and Qu L. “Power electronics-enabled self-X multicell batteries: A design toward smart batteries.” IEEE Trans Power Electron. (2012);27(11):4723–33. [CrossRef]
- Song M, Zhu D, Zhang L, Wang X, Chen Y, Mi R, Liu H, Mei J, and Lau LWM. “Improved charging performances of Li2O2 cathodes in non-aqueous electrolyte lithium-air batteries at high test temperatures.” In: ICMREE 2013 - Proceedings: 2013 International Conference on Materials for Renewable Energy and Environment. 2013. p. 513–5. [CrossRef]
- Meng J, Luo G, and Gao F. “Lithium polymer battery state-of-charge estimation based on adaptive unscented kalman filter and support vector machine.” IEEE Trans Power Electron. (2016);31(3):2226–38. [CrossRef]
- 53. Kranjec, B.; Sladic, S.; Giernacki, W.; Bulic, N. PV System Design and Flight Efficiency Considerations for Fixed-Wing Radio-Controlled Aircraft—A Case Study. Energies 2018, 11, 2648. https://doi.org/10.3390/en11102648 ] on board of the UAV. [CrossRef]
- RS Components. “Fiamm 12V Faston F1 Sealed Lead Acid Battery, 2Ah” [Internet]. [cited 2023 May 18]. Available from: https://za.rs-online.com/web/p/lead-acid-batteries/8431308/.
- RS Components. “RS PRO 12V NiMH Rechargeable Battery Pack, 2Ah - Pack of 1” [Internet]. [cited 2023 May 18]. Available from: https://za.rs-online.com/web/p/rechargeable-battery-packs/ 7770400/.
- RS Components. “Samsung, INR-18650 20R, 3.6V, 18650, Lithium-Ion Rechargeable Battery, 2Ah” [Internet]. [cited 2023 May 18]. Available from: https://za.rs-online.com/web/p/speciality-size-rechargeable-batteries/ 8182992/.
- RS Components. “RS PRO 12V NiCd Rechargeable Battery Pack, 1.8Ah - Pack of 1” [Internet]. [cited 2023 May 18]. Available from: https://za.rs-online.com/web/p/rechargeable-battery-packs/1253427.
- RS Components. “RS PRO Alkaline AA Battery 1.5V” [Internet]. [cited 2023 May 18]. Available from: https://za.rs-online.com/web/p/aa-batteries/7442199/.
- RS Components. “RS PRO, 3.7V, Lithium Polymer Rechargeable Battery, 2Ah” [Internet]. [cited 2023 May 18]. Available from: https://za.rs-online.com/web/p/speciality-size-rechargeable-batteries/1251266.
- RS Components. “RS PRO PR44 Button Battery, 1.4V, 11.6mm Diameter” [Internet]. [cited 2023 May 18]. Available from: https://za.rs-online.com/web/p/button-batteries/8010730.
- Mantech Electronics. “LITHIUM CELL / BATTERY AA 3V6 2.2AH 14x50.”.
- NASA. “Technology Readiness Level Definitions.” (1989);1. Available from: https://www.nasa.gov/pdf/458490main_TRL_Definitions.pdf.
- Kalogirou SA. “Industrial Process Heat, Chemistry Applications, and Solar Dryers.” In: Solar Energy Engineering. 2009. p. 391–420.
- DRONEII.com. “Drone Energy Sources – Pushing the Boundaries of Electric Flight” [Internet]. [cited 2020 Jul 30]. Available from: https://droneii.com/drone-energy-sources.
- Ganguly S, Das S, Kargupta K, and Bannerjee D. “Optimization of Performance of Phosphoric Acid Fuel Cell (PAFC) Stack using Reduced Order Model with Integrated Space Marching and Electrolyte Concentration Inferencing.” Comput Aided Chem Eng. (2012);31:1010–4. [CrossRef]
- Kumar V, Rudra R, Hait S, Kumar P, and Kundu PP. “Performance trends and status of microbial fuel cells.” Prog Recent Trends Microb Fuel Cells. (2018);7–24. [CrossRef]
- Haile SM, Boysen DA, Chisholm CRI, and Merie RB. “Solid acids as fuel cell electrolytes.” Nature. (2001);410(6831):910–3. [CrossRef]
- Chen B, Li X, and Evangelou S. “Comparative Study of Hybrid Powertrain Architectures from a Fuel Economy Perspective.” In: 14th International Symposium on Advanced Vehicle Control, AVEC’18. 2018. p. 1–6.
- Haile SM, Chisholm CRI, Sasaki K, Boysen DA, and Uda T. “Solid acid proton conductors: From laboratory curiosities to fuel cell electrolytes.” Faraday Discuss. (2007);134:17–39. [CrossRef]
- Rajabi MS, Beigi P, and Aghakhani S. “Drone Delivery Systems and Energy Management: A Review and Future Trends.” (2022); Available from: http://arxiv.org/abs/2206.10765.
- Shah SD. “Electrification of transport and oil displacement: How plug-ins could lead to a 50 percent reduction in US. demand for oil.” Plug-in Electr Veh What Role Washington? (2009);22–44.
- Yilmaz M and Krein PT. “Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles.” IEEE Trans Power Electron. (2013);28(5):2151–69.
- Traub LW. “Range and endurance estimates for battery-powered aircraft.” J Aircr. (2011);48(2):703–7. https://doi.org/10.2514/1.c031027. [CrossRef]
- Wang Y, Chen KS, Mishler J, Cho SC, and Adroher XC. “A review of polymer electrolyte membrane fuel cells: Technology, applications, and needs on fundamental research.” Appl Energy. (2011);88(4):981–1007. [CrossRef]
- Burke A and Miller M. “Comparisons of Ultracapacitors and Advanced Batteries for Pulse Power in Vehicle Applications : Performance , Life , and Cost.” Electronics. :855–66.
- Suzuki KAO, Kemper Filho P, and Morrison JR. “Automatic Battery Replacement System for UAVs: Analysis and Design.” Recent Dev Unmanned Aircr Syst. (2011);563–86.
- Jain AK, Mathapati S, Ranganathan VT, and Narayanan V. “Integrated starter generator for 42-V powernet using induction machine and direct torque control technique.” IEEE Trans Power Electron. (2006);21(3):701–10. [CrossRef]
- Swieringa KA, Hanson CB, Richardson JR, White JD, Hasan Z, Qian E, and Girard A. “Autonomous battery swapping system for small-scale helicopters.” Proc - IEEE Int Conf Robot Autom. (2010);3335–40. [CrossRef]
- Kraemer D, Hu L, Muto A, Chen X, Chen G, and Chiesa M. “Photovoltaic-thermoelectric hybrid systems: A general optimization methodology.” Appl Phys Lett. (2008);92(24). [CrossRef]
- Bocewicz G, Nielsen P, Banaszak Z, and Thibbotuwawa A. “A declarative modelling framework for routing of multiple UAVs in a system with mobile battery swapping stations.” In: Advances in Intelligent Systems and Computing. 2019. p. 429–41. [CrossRef]
- Emadi A, Rajashekara K, Williamson SS, and Lukic SM. “Topological overview of hybrid electric and fuel cell vehicular power system architectures and configurations.” IEEE Trans Veh Technol. (2005);54(3):763–70. [CrossRef]
- Steilen M and Jörissen L. “Hydrogen Conversion into Electricity and Thermal Energy by Fuel Cells.” In: Electrochemical Energy Storage for Renewable Sources and Grid Balancing. 2015. p. 143–58. [CrossRef]
- Thanomjit C, Patcharavorachot Y, and Arpornwichanop A. “Design and Thermal Analysis of a Solid Oxide Fuel Cell System Integrated with Ethanol Steam Reforming.” Comput Aided Chem Eng. (2012);30:287–91. [CrossRef]
- Uzunoglu M and Alam MS. “Fuel-Cell Systems for Transportations.” In: Power Electronics Handbook, Fourth Edition. 2017. p. 1091–112.
- Dharmalingam S, Kugarajah V, and Sugumar M. “Membranes for microbial fuel cells.” In: Biomass, Biofuels, Biochemicals: Microbial Electrochemical Technology: Sustainable Platform for Fuels, Chemicals and Remediation. 2018. p. 143–94.
- Fathabadi H. “Plug-In Hybrid Electric Vehicles: Replacing Internal Combustion Engine with Clean and Renewable Energy Based Auxiliary Power Sources.” IEEE Trans Power Electron. (2018);33(11):9611–8. [CrossRef]
- Mehta V and Cooper JS. “Review and analysis of PEM fuel cell design and manufacturing.” Fuel Cells Compend. (2005);469–501. [CrossRef]
- Mohammed OA, Lowther DA, Lean MH, and Alhalabi B. “On the creation of a generalized design optimization environment for electromagnetic devices.” IEEE Trans Magn. (2001);37(5 I):3562–5. [CrossRef]
- Rhoads GD, Wagner NA, Taylor BJ, Keen DB, and Bradley TH. “Design and flight test results for a 24 hour fuel cell unmanned aerial vehicle.” In: 8th Annual International Energy Conversion Engineering Conference. 2010. [CrossRef]
- Barreras F, Lozano A, Valiño L, Marín C, and Pascau A. “Flow distribution in a bipolar plate of a proton exchange membrane fuel cell: Experiments and numerical simulation studies.” J Power Sources. (2005);144(1):54–66. [CrossRef]
- Gong A, MacNeill R, Verstraete D, and Palmer JL. “Analysis of a Fuel-Cell/Battery /Supercapacitor Hybrid Propulsion System for a UAV Using a Hardware-in-the-Loop Flight Simulator.” 2018 AIAA/IEEE Electr Aircr Technol Symp EATS 2018. (2018). [CrossRef]
- Kim, S.-G.; Lee, E.; Hong, I.-P.; Yook, J.-G. Review of Intentional Electromagnetic Interference on UAV Sensor Modules and Experimental Study. Sensors 2022, 22, 2384. https://doi.org/10.3390/s22062384. [CrossRef]
- B. Galkin, L. A. DaSilva, UAVs as Mobile Infrastructure: Addressing Battery Lifetime, arXiv:1807.00996 [cs] (Jul. 2018). [CrossRef]
Figure 1.
Two types of drones, (a) fixed-wing drone, (b) rotary-wing drone.

Figure 2.
A typical UAV block diagram [92].
Figure 2.
A typical UAV block diagram [92].
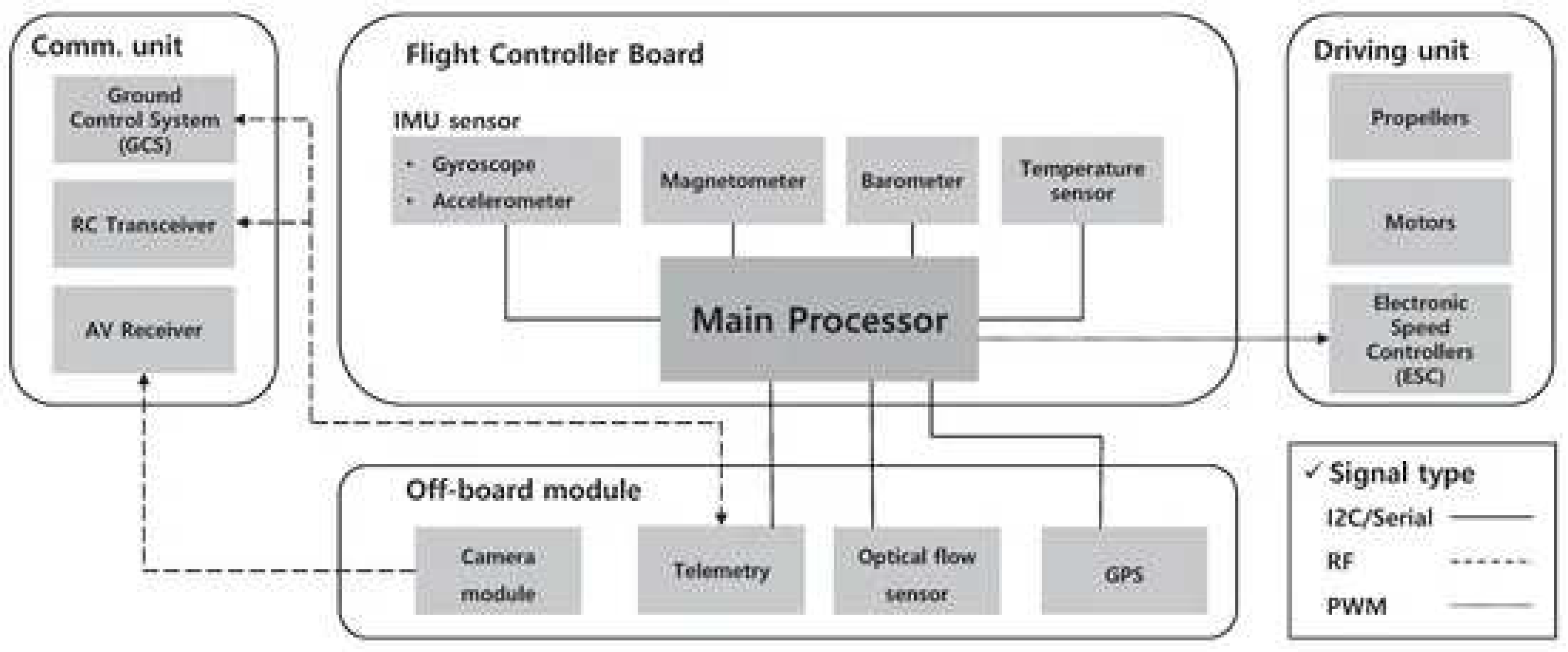
Figure 3.
UAV propulsion system block diagram.
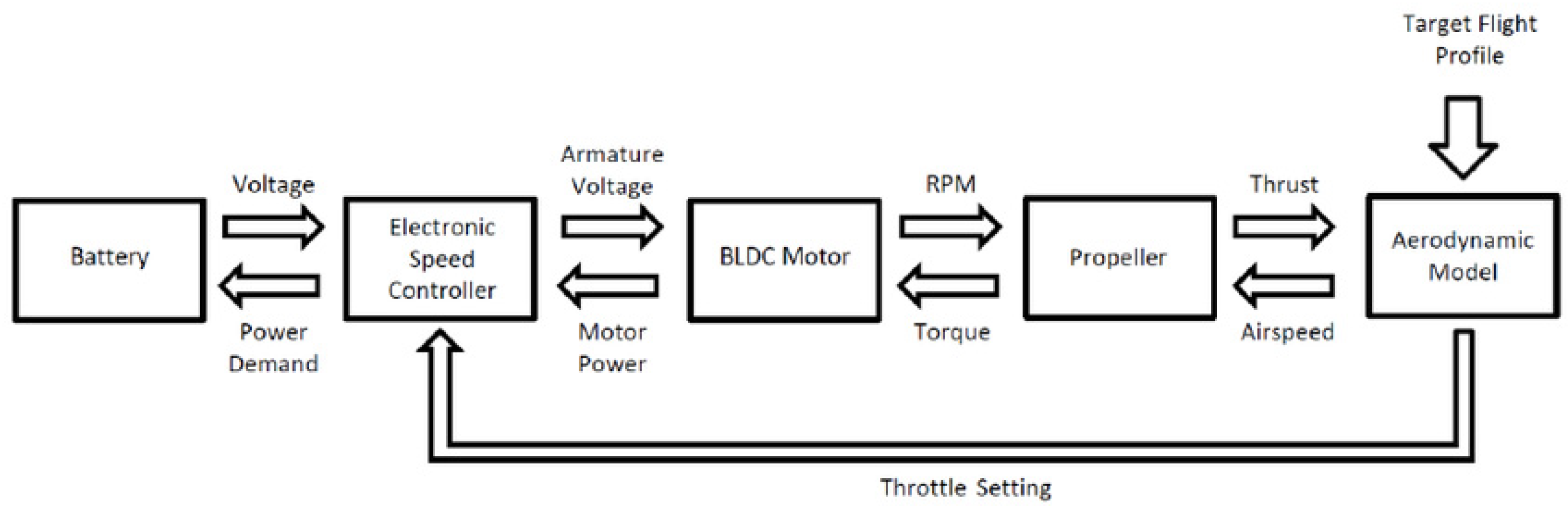
Figure 4.
The Swapping and Hot swapping algorithms.
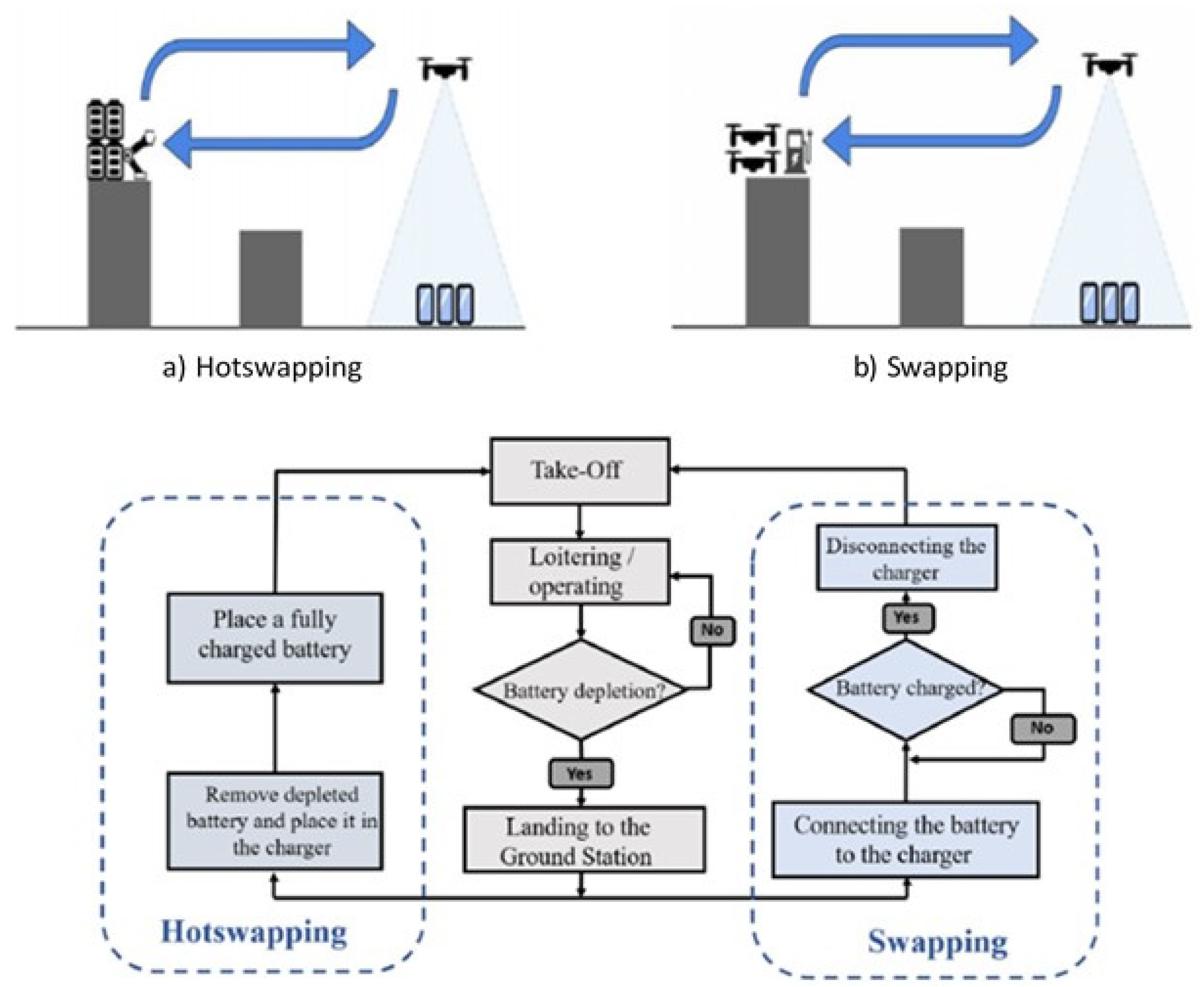
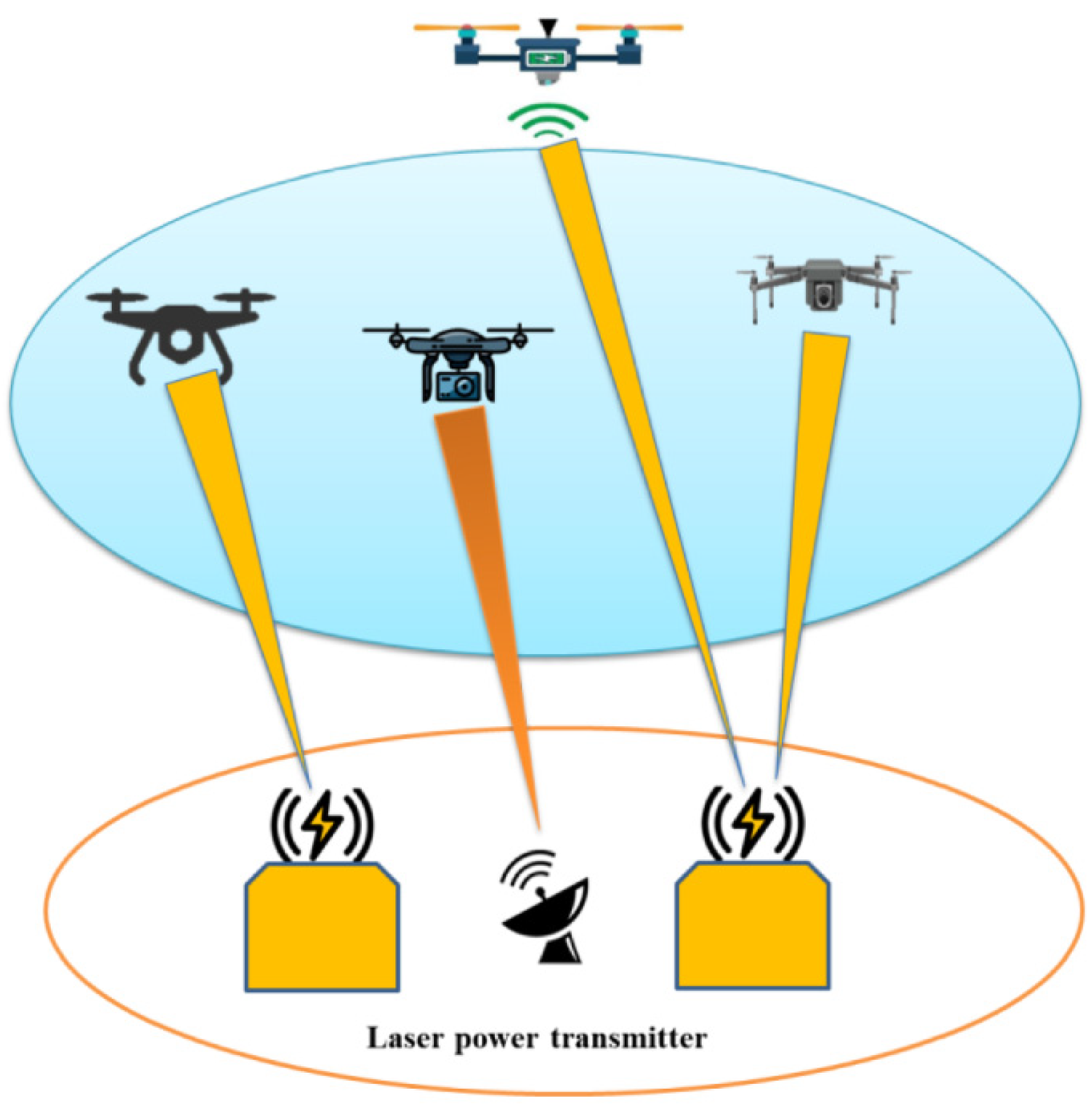
Figure 6.
The fuel cell system auxiliaries.
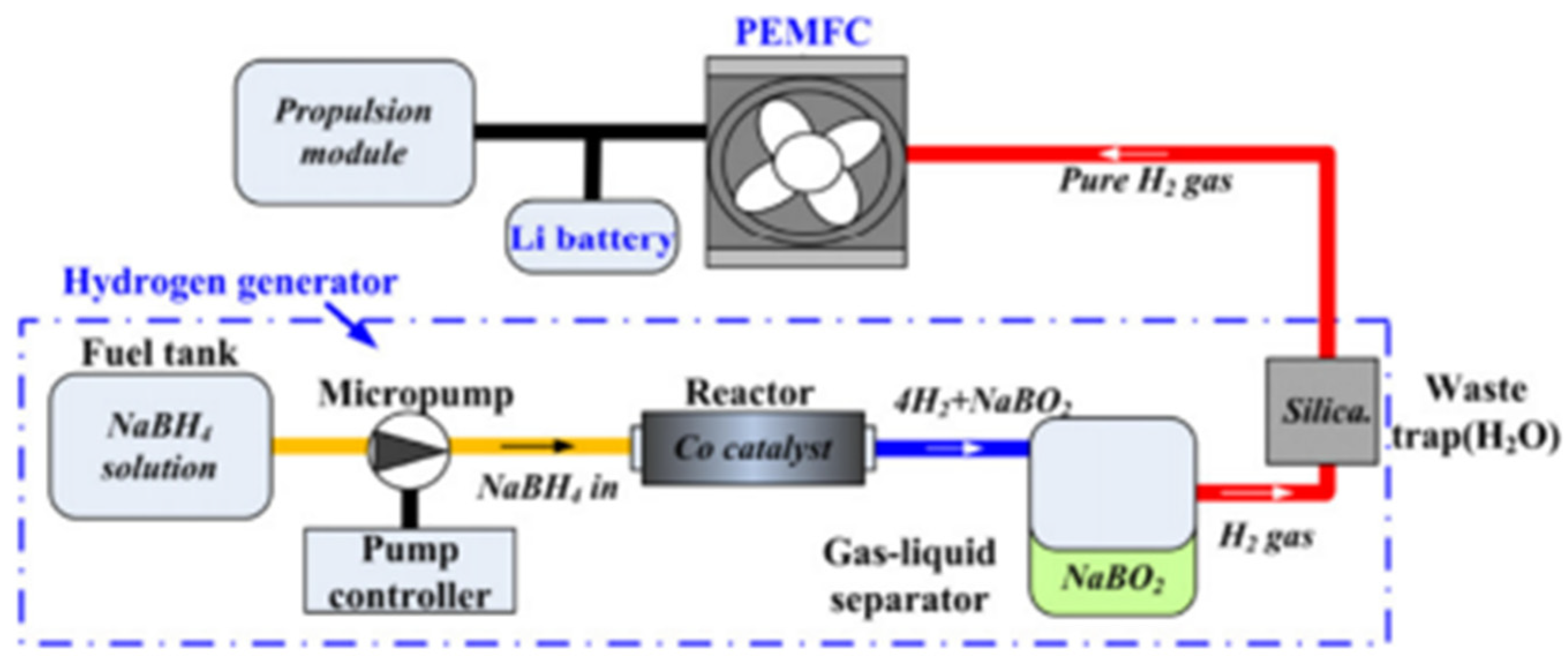
| Characteristics | Ni-Cd | Ni-Mh | LiPo | Li-S |
|---|---|---|---|---|
| Specific energy (Wh/kg) | 40 | 80 | 180 | 350 |
| Energy density (Wh/l) | 100 | 300 | 300 | 350 |
| Specific power (W/kg) | 300 | 900 | 2800 | 600 |
| Main Contribution | Advantages | Limitations |
|---|---|---|
| An aerial prototype utilizing multiple rotors designed for surveillance missions of extended duration by employing battery health monitoring. | The hardware prototype enables uninterrupted operation by taking into account battery health considerations. | The system does not include autonomous swapping, and its operation is managed using a laptop instead of an embedded controller. |
| The design, testing, and construction of an autonomous ground recharge station were carried out, incorporating a balancer and safer electrical contacts. | A hardware platform was developed that enabled autonomous swapping, utilizing an embedded controller. An optimization algorithm was implemented to minimize the recharge duration. | Although no flight test was conducted, the hardware platform focused on autonomous swapping and did not consider battery health as a factor in its design. |
| A planning and learning algorithm was developed and tested during a 3-hour long persistent flight involving three UAVs and over 100 battery swaps. | The design and hardware implementation of an automated refuelling system were carried out, and flight tests were conducted to evaluate its performance. | The discussion of system cost and the consideration of landing accuracy were not included in the analysis. |
| An automated swapping mechanism was implemented, incorporating online algorithms for energy management, vehicle health monitoring, and accurate landing. The system aimed to optimize the swapping process by efficiently managing energy resources, monitoring the health of the vehicles, and ensuring precise landing during the swapping operation. | The constructed platform is designed to sustain continuous operation of a single UAV indefinitely. It incorporates algorithms for precision landing, ensuring accurate and safe landing during the swapping process. Additionally, the platform includes battery health tracking algorithms to monitor and manage the condition of the batteries, optimizing their performance and lifespan. | The entire system, including all its components and functionalities, was not tested as a whole. While individual tests were conducted for specific aspects of the system, such as precision landing and battery health tracking, a comprehensive test involving the complete system was not performed. |
| A design for an autonomous docking platform was developed, incorporating the use of active infrared imaging. The system utilized a combination of a camera and an infrared filter to achieve precise and accurate docking between the unmanned aerial vehicle (UAV) and the docking platform. The active infrared imaging technology enabled the system to operate effectively both during the day and at night, enhancing the reliability and versatility of the docking process. | A hardware platform was created to enable accurate and fast swapping of components, specifically targeting an impressive swapping time of 8 seconds. The platform was designed to operate seamlessly during both daytime and night time conditions, ensuring its usability in various environments and lighting conditions. This capability allows for continuous and efficient operations, minimizing downtime and maximizing the overall efficiency of the system. | No flight tests were conducted to evaluate the performance of the hardware platform. Additionally, the study did not focus on discussing the specific improvements in endurance achieved through the implemented technology. |
| A dual-drum structure was implemented in the hardware platform to enable fast and efficient hot swapping. This design feature allows for quick replacement of batteries, enhancing the efficiency of the swapping process. | A flight test was conducted to evaluate the performance of the system, taking into account communication constraints. During the test, the system was assessed under real-world conditions, considering limitations in communication capabilities. This provided valuable insights into the system's performance and effectiveness in scenarios with communication constraints. | The study did not include tracking the health of the vehicle or monitoring its condition. Additionally, the experiments conducted had a maximum mission time of only 70 minutes. Therefore, the study did not focus on monitoring and assessing the overall health and performance of the vehicle throughout extended missions. |
| A declarative model was proposed to optimize the routing of a multi-agent system consisting of UAVs and mobile battery swapping stations (MBSs) for delivery missions. The model aimed to efficiently plan the routes and schedules of UAVs and MBSs to ensure timely battery replacements and loading/unloading of goods. However, it is important to note that the study primarily focused on the routing aspect and did not involve specific experiments or tests related to the functionality and feasibility of mobile battery swapping stations in the context of delivery missions. | The study focused on optimizing the distance travelled and the number of UAVs in the context of the proposed multi-agent system with mobile battery swapping stations. The goal was to find an optimal configuration that minimizes the overall distance travelled by the UAVs and maximizes the efficiency of the system. By optimizing these factors, the study aimed to enhance the performance and cost-effectiveness of the system. However, it should be noted that the feasibility and practicality of implementing the proposed optimizations were not specifically tested or evaluated in the study. | The study presented computational results related to the optimization of the travelled distance and the number of UAVs in the context of the multi-agent system with mobile battery swapping stations. However, it did not include experimental validation or testing of the proposed techniques. The focus of the study was on computational modelling and analysis, providing insights into the potential benefits of the proposed optimizations. The specific details and mechanisms of the swapping technique were not discussed in the study, as it primarily concentrated on the computational aspects of routing and optimization. |
| The study aimed to achieve precise UAV positioning after landing with minimal error. The researchers focused on developing techniques or algorithms that would ensure accurate positioning of the UAVs after the landing process. By minimizing the positioning error, they aimed to enhance the overall performance and efficiency of the system. However, it is important to note that the specific methods or approaches used to achieve precise UAV positioning after landing were not detailed in the information provided. | The research focused on achieving precise UAV positioning for swapping operations, regardless of any errors that may occur during the landing process. The objective was to develop techniques or strategies that would ensure accurate and reliable positioning of the UAVs during swapping, even if the initial landing had some degree of error. By addressing this challenge, the researchers aimed to enhance the efficiency and effectiveness of the swapping process, enabling seamless battery replacement and continuous operation of the UAVs. However, specific details about the methods or approaches employed to achieve precise positioning in the presence of landing errors were not provided in the given information. | The study reported a relatively long swapping duration, indicating that the process of replacing batteries in the system took a considerable amount of time. However, it should be noted that the entire system, including all its components and functionalities, was not tested as a whole. This means that while certain aspects of the swapping process may have been examined or validated individually, the complete integration and performance of the system were not assessed through comprehensive testing. As a result, the overall efficiency and effectiveness of the swapping mechanism, as well as its potential limitations or drawbacks, remain uncertain and require further investigation or evaluation. |
| Compressed H2 | Liquid H2 | |
| Properties | The most commonly used method for hydrogen storage in UAV applications is high-pressure storage. Hydrogen is stored at pressures ranging from 35 to 70 megapascals (MPa). At these high pressures, the density of hydrogen increases, reaching approximately 42 kg/m3 at 70 MPa | Hydrogen has a density of approximately 71 kg/m3 at 1 bar and a temperature of -252.87°C, which is extremely low. To store hydrogen in its liquid form, a thermal insulation system is necessary to maintain such low temperatures. While hydrogen storage has benefits for large-scale applications, it can be challenging on a smaller scale. The liquefaction process requires extremely low temperatures, making it costly and energy-intensive. It is more practical for large-scale production and distribution systems rather than small-scale applications. |
| Advantages | High-pressure storage offers several advantages. It is a relatively simple method, requiring a pressure vessel to contain the hydrogen gas. The storage mass penalty, or the additional weight of the storage system, is relatively low compared to other storage methods. Additionally, high-pressure storage allows for rapid refuelling capability, enabling quick turnaround times for UAV operations. However, there are certain drawbacks to high-pressure storage. One significant disadvantage is the low storage efficiency. The energy required to compress hydrogen to high pressures results in energy losses, reducing the overall storage efficiency. This can impact the range and endurance of the UAV. |
There are several advantages to using hydrogen as a fuel despite its low density. One advantage is its high energy density, which means that a relatively small volume of hydrogen can store a large amount of energy. This high energy density enables longer flight durations and increased operational efficiency for UAVs. Hydrogen storage also offers improved safety compared to other fuel options. Hydrogen is non-toxic and non-polluting, and it dissipates rapidly in the event of a leak. However, safety measures are still necessary due to its flammability and the potential for embrittlement of materials in the presence of hydrogen. |
| Disadvantages | Safety risks are also a concern with high-pressure storage. The high pressures involved in the storage process increase the potential for leaks or ruptures, which can be hazardous. Proper safety measures and precautions must be in place to mitigate these risks. Another consideration is the larger volume required for high-pressure storage systems. The pressure vessels need to be sized to accommodate the required amount of hydrogen at the specified pressure. This can increase the overall size and volume of the UAV, affecting its aerodynamics and payload capacity. In summary, high-pressure storage is a commonly used method for hydrogen storage in UAVs. It offers simplicity, low storage mass penalty, and rapid refuelling capabilities. However, it has drawbacks such as low storage efficiency, safety risks, and the need for larger storage volumes. These factors should be carefully considered when selecting the appropriate storage method for UAV applications. |
Handling and transporting hydrogen in its liquid form can be difficult due to the low temperatures involved and the need for specialized storage and transportation infrastructure. Additionally, the weight of the storage tanks can be significant, impacting the overall weight of the UAV. In summary, while hydrogen offers advantages such as high energy density, improved safety, and the potential for long-duration flights, there are challenges associated with its low density, high liquefaction energy requirements, impractical small-scale production, and the need for careful handling and storage. These factors must be carefully considered in the design and implementation of hydrogen storage systems for UAV applications. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



