
Submitted:
29 August 2023
Posted:
29 August 2023
You are already at the latest version
Abstract
The predominance of traffic lights in urban settings often induces fluctuations in traffic patterns and energy utilization among vehicles. To counteract the adverse effects of traffic lights on the energy efficiency of electric vehicles (EVs), a Multi-Intersections-Based Eco-Approach and Departure strategy (M-EAD) is proposed. This strategy aims to enhance vehicle energy efficiency, traffic flow, and battery longevity, all while upholding satisfactory driving comfort. The M-EAD strategy unfolds in two distinct stages: the optimization of an eco-friendly green signal window and the refinement of speed trajectories. The initial stage tackles the optimization of traffic light green signal windows, underpinned by the minimization of travel delays via solving the shortest path problem. In the subsequent stage, a receding horizon framework takes center stage, leveraging an iterative dynamic programming algorithm to tackle the speed optimization challenge. The objective here is to curtail energy consumption and reduce battery wear by finding an optimal speed trajectory. Furthermore, the real-world efficacy of this approach is substantiated through on-road vehicle tests, attesting to its viability in actual road scenarios.
Keywords:
Energy efficiency
; optimization
; electric vehicle
; M-EAD
1. Introduction
The increasing global concern for energy efficiency and the reduction of greenhouse gas emissions has catapulted the exploration of methods to optimize the energy consumption of connected vehicles to the forefront of transportation research. As the deployment of connected vehicles becomes more widespread, their remarkable capacity to communicate with fellow vehicles, infrastructure, and centralized servers presents a myriad of opportunities to enhance traffic flow dynamics and substantially curtail energy consumption [1].
The optimization of traffic flow has remained an object of intense research interest for several decades [2,3]. This pursuit has yielded a substantial payoff, promising significant advancements in road safety and energy efficiency, while simultaneously alleviating the growing congestion predicament on roads. The advent of connected and autonomous vehicles, coupled with the rapid expansion of wireless communication technologies, has paved the way for pioneering prospects in traffic flow optimization.
Beyond the realm of energy consumption optimization, connected vehicles hold immense potential to usher in novel business models and revenue streams for the automotive industry and the broader transportation sector [4]. Armed with the ability to gather and scrutinize data on driving patterns, vehicle performance, and user preferences, connected vehicles lay the foundation for a range of personalized services [5]. These services span from on-demand car sharing and predictive maintenance to remote diagnostics. As they give rise to new revenue channels for automotive manufacturers, dealers, and service providers, the allure of these services lies not only in financial gains but also in the promise of improved user experiences and elevated customer loyalty.
Delving further into this transformative paradigm, connected vehicles are poised to serve as catalysts for innovative mobility services, exemplified by the concept of mobility-as-a-service (MaaS) [6]. MaaS ingeniously combines disparate modes of transportation—ranging from public transit to ride-hailing and bike-sharing—into an intricately choreographed and personalized user journey. Leveraging their inherent communication capabilities, connected vehicles empower MaaS providers to harmonize their operations, slash operational costs, and furnish urban residents with more sustainable, seamless, and efficient mobility options [7].
The ubiquity of traffic lights in urban landscapes frequently triggers fluctuations in traffic dynamics and energy utilization for vehicles. These speed variations can have significant repercussions on the energy efficiency of electric vehicles (EVs) [8,9]. To counteract the detrimental impact of traffic lights on EV energy efficiency, a Multi-Intersections-Based Eco-Approach and Departure strategy (M-EAD) is introduced in this paper. The fundamental objective of the M-EAD strategy is to holistically enhance not only the energy efficiency of EVs but also the overall traffic flow and battery longevity, all while ensuring a comfortable driving experience.
The M-EAD strategy is comprised of two interlinked stages, each addressing specific aspects of the energy-efficiency challenge. In the initial stage, meticulous planning of eco-friendly green signal windows takes precedence. This planning is grounded in optimizing traffic light signal timing to minimize vehicle travel delays. Through the application of optimization techniques, such as solving the shortest path problem, the M-EAD strategy aims to orchestrate traffic light cycles that are conducive to smoother traffic flow and reduced congestion-related energy losses.
In the subsequent stage, the focus shifts to refining speed trajectories through a receding horizon framework. This framework incorporates an iterative dynamic programming algorithm that aims to minimize energy consumption and diminish battery wear by generating optimal speed profiles for EVs. By considering both short-term energy efficiency and long-term battery health, the M-EAD strategy ensures that driving patterns align with sustainable energy consumption and prolonged battery life.
Furthermore, the viability and effectiveness of the M-EAD strategy are not limited to theoretical scenarios. Real-world validation is achieved through rigorous on-road vehicle testing under actual road conditions. The results of these tests provide empirical evidence of the strategy’s ability to enhance energy efficiency, improve traffic flow dynamics, and extend battery life. This comprehensive approach underscores the strategy’s potential to revolutionize urban driving paradigms, mitigating the adverse effects of traffic lights on EVs and contributing to more sustainable and efficient urban transportation systems.
In this context, the present study introduces an M-EAD (Multi-Objective Energy-Aware Driving) strategy meticulously designed to elevate the performance of electric vehicles (EVs) through a meticulously crafted two-stage control framework. This framework deftly tackles a multifaceted spectrum of objectives encompassing energy efficiency, travel time optimization, battery life preservation, and driving comfort enhancement. The study provides several contributions:
- Firstly, a robust formulation for the optimal control problem (OCP) is proposed, taking into consideration the intricate crossroads traversal of an EV as an all-encompassing cost function. This function meticulously balances the goals of energy efficiency, travel time minimization, battery life preservation, and enhanced driving comfort.
- Secondly, a two-stage M-EAD strategy takes center stage, presenting a highly efficient mechanism to resolve the multi-objective OCP. The strategy unfurls in two essential phases—a tactically devised green signal window planning phase and a meticulously choreographed speed trajectory optimization phase.
- In recognition of the intricate challenges posed by optimizing velocity profiles and managing energy, we introduce a hierarchical control structure within the Model Predictive Control (MPC) framework. This architecture serves to mitigate the inherent complexities associated with these tasks.
- We present an innovative strategy for optimizing velocity that promotes both safety and energy efficiency. This strategy centers on proactive driving by accurately anticipating forthcoming information, resulting in more effective and energy-conscious driving behaviors.
- The paper introduces computationally efficient algorithms to address real-time challenges in achieving energy-efficient outcomes. Specifically, these algorithms tackle the optimization of velocity and the management of energy independently, providing real-time solutions that meet energy-efficiency objectives.
Amidst a realm of intricate simulations and meticulous comparative analyses, the proposed M-EAD strategy shines through as a beacon of efficiency and intelligence. The outcomes resoundingly illustrate substantial advancements in energy efficiency, notable reductions in travel times, pronounced elongations of battery life, and a marked elevation in driving comfort for electric vehicles. The revelations underscore the pivotal role such strategies can play in spearheading the cause of sustainable transportation while simultaneously pioneering the evolution of urban mobility dynamics. In a world increasingly grappling with the challenges of burgeoning urbanization and a pressing imperative for environmental sustainability, the M-EAD strategy emerges as a harbinger of a more intelligent, efficient, and sustainable transportation fabric for smart cities.
The horizon of transportation is poised for transformation, and the marriage of technological innovation with enlightened strategies is forging a path toward a future where cities move smarter, cleaner, and more harmoniously.
2. Literature Review
In recent years, there has been a growing interest in using machine learning for traffic flow optimization in connected vehicles. One promising approach is to use deep learning algorithms, which can effectively handle the large amounts of data generated by connected vehicles. Deep learning models, such as convolutional neural networks (CNNs) and recurrent neural networks (RNNs), have been shown to be effective in accurately predicting traffic flow [10].
In a recent study, [11] proposed a reinforcement learning-based framework to optimize traffic signal timings at intersections. The study showed significant improvements in the efficiency of traffic flow, leading to a reduction in average delay time and an increase in average travel speed. Similarly, [12] proposed a deep reinforcement learning algorithm for traffic signal control, which demonstrated improved traffic flow efficiency, reducing overall travel time and fuel consumption.
In another study, [13] proposed a hybrid machine learning approach combining a deep belief network and a support vector machine for traffic flow prediction. The model achieved high accuracy in predicting traffic flow, which is essential for effective traffic flow optimization. A similar approach was proposed by [14], where a deep neural network-based traffic flow prediction model was used to optimize traffic flow, leading to a reduction in congestion and fuel consumption.
Moreover, several studies have investigated the use of machine learning algorithms for vehicle routing optimization. For example, [15] proposed a machine learning-based algorithm for vehicle routing optimization, which achieved significant reductions in fuel consumption and travel time. In another study, [16] proposed a reinforcement learning-based algorithm for dynamic vehicle routing optimization, which demonstrated improved vehicle travel time and reduced fuel consumption.
In a study by [17], a deep learning-based traffic flow prediction model was developed using a long short-term memory (LSTM) network. The model was trained on real-world traffic data and demonstrated high accuracy in predicting traffic flow, leading to improved traffic flow optimization. Similarly, [18] proposed a CNN-based model for traffic flow prediction, which achieved high accuracy and outperformed other prediction models.
In addition to traffic flow prediction, machine learning can also be used for real-time traffic signal control. In a recent study, [19] proposed a reinforcement learning-based traffic signal control algorithm for connected vehicles. The algorithm was trained on real-time traffic data and demonstrated improved traffic flow efficiency and reduced congestion.
However, there are some challenges associated with using machine learning for traffic flow optimization in connected vehicles. One challenge is the lack of data interoperability between different connected vehicle systems, which can lead to data fragmentation and hinder the development of accurate prediction models [20]. Another challenge is the potential for bias in the data, which can result in inaccurate predictions and sub-optimal traffic flow optimization.
To address these challenges, researchers have proposed various solutions, such as developing inter-operable data standards and using ensemble learning to combine different prediction models [21].
The pursuit of eco-driving control solutions has prompted considerable research, with a focus on diverse driving scenarios. Scholars have directed their attention toward tailoring strategies to specific contexts. For instance, several studies, including those by Zhuang et al. [22], Ding and Jin [23], and Mello and Bauer [24], delve into the intricacies of cruising control during free-driving conditions. Conversely, Zhang et al. [25], He et al. [26], and Shao and Sun [27] have devoted their efforts to refining car-following control strategies for vehicles trailing preceding counterparts.
The realm of signalized intersection crossing has drawn considerable interest as well, prompting research contributions by Katsaros et al. [28], Hao et al. [29], Sun et al. [30], Han et al. [31], Lin et al. [32], and Dong et al. [33]. These endeavors primarily aim to optimize vehicle behavior when encountering traffic signals, thereby minimizing energy consumption and promoting efficiency at intersections.
Addressing the complexities of mixed driving scenarios, Xie et al. [34] and Wegener et al. [35] have ventured into the challenging domain of diverse traffic environments. Their work introduces an energy-economy speed optimization approach that concurrently ensures safe inter-vehicle distances in varied driving contexts. Meanwhile, Dong et al. [36] and Yang et al. [37] have enriched the concept of Eco-Approach and Departure (EAD) strategy by proposing enhancements that enable vehicles to navigate intersections without halting, factoring in the discharge of vehicle queues.
However, the landscape of urban traffic is inherently dynamic and unpredictable, contributing to the occurrence of mixed driving scenarios. The distribution of intersections and the sporadic presence of dynamic preceding vehicles magnify the complexity. In such scenarios, vehicles may contend with a blend of conditions, including free driving, signalized intersection crossings, or signalized intersection crossings with proximate leading vehicles. Consequently, the conventional approach of isolated scenario-specific strategies may fall short in addressing the diverse challenges posed by the intricate urban traffic environment.
To bridge this gap, this review underscores the need for comprehensive solutions that encompass a wider spectrum of driving situations. The proposed Multi-Intersections-Based Eco-Approach and Departure strategy (M-EAD) introduces a novel perspective by tackling the complexity of mixed driving scenarios. By encompassing free driving, signalized intersection crossings, and intersections with preceding vehicles, the M-EAD strategy embraces the multifaceted nature of urban traffic conditions. This inclusive approach aims to enhance energy efficiency, traffic flow, and battery longevity while accounting for the inherent randomness of driving scenarios. In doing so, the M-EAD strategy emerges as a promising contender to address the intricate energy optimization challenges faced by electric vehicles in urban traffic contexts.
In the quest for more effective eco-driving control strategies, it is evident that existing approaches tend to operate within specific and isolated driving scenarios. While these strategies have yielded valuable insights and optimizations tailored to particular contexts, they may inadvertently overlook the synergistic opportunities that arise from the interplay of diverse driving conditions. The fluid nature of urban traffic necessitates a more holistic approach that transcends isolated scenarios and considers the intricate connections between them. The proposed Multi-Intersections-Based Eco-Approach and Departure strategy (M-EAD) bridges this gap by embracing the randomness and variability inherent in urban traffic environments. By encompassing the spectrum of free driving, signalized intersection crossings, and intersections with leading vehicles, the M-EAD strategy positions itself as a versatile solution that not only optimizes energy consumption but also accounts for the nuanced dynamics between different driving scenarios. Through this integrated lens, the M-EAD strategy emerges as a transformative approach that can potentially revolutionize the field of eco-driving control, paving the way for more adaptable, resilient, and efficient electric vehicle operation in urban settings.
3. Material and Method
In this section, we delve into a comprehensive exploration of the driving scenario meticulously designed for connected electric vehicles (EVs) navigating a predefined route that encompasses a series of strategically placed signalized intersections. Throughout the entirety of the paper, a pivotal and recurrent term, the "green window," takes center stage, representing the temporal extent of the green traffic signal phase. This concept, pivotal to our methodology, encapsulates the timeframe during which vehicles can traverse the intersection without halting, directly impacting energy efficiency and travel time optimization.
Furthermore, this paper ventures into the intricate realm of multiple intersections, where the complexities of urban traffic are magnified by the presence of these traffic control nodes. The interactions and dynamics that transpire as vehicles approach, navigate, and depart from these intersections are scrutinized through the lens of connected EVs. As these vehicles harmonize with the evolving signal phases and green windows, a dynamic dance unfolds, one that holds the potential to redefine urban mobility by harmonizing energy efficiency, traffic flow, and driver experience.
To provide a robust foundation for our study, vehicle dynamics models assume a pivotal role. These models encapsulate the intricate interplay of forces, propulsion mechanisms, and vehicle characteristics that govern EV behavior. By integrating these models into our analysis, we paint a holistic and realistic picture of how connected EVs interact with their environment and each other. The synergy between these models and the dynamic variables, such as signal phase timings and green windows, orchestrates a comprehensive understanding of the intricate interplay that defines urban driving scenarios.
As we traverse these sections, a comprehensive tapestry emerges, woven from the threads of driving scenarios, green windows, multiple intersections, and vehicle dynamics models. This holistic exploration lays the foundation for the innovative strategies and concepts that follow, aiming to revolutionize energy-efficient mobility in urban landscapes.
3.1. Models for multiple signalized intersections
In this part, we present the driving scenario for connected electric vehicles (EVs) that involves navigating through multiple signalized intersections along a predefined route. To simplify the discussion, we refer to the green traffic signal interval as the "green window" throughout the paper. We also provide models for multiple intersections and vehicle dynamics.
We outline a general route denoted as , as depicted in Figure 1. This route comprises signalized intersections. Within this context, F represents the framework of the route, while , with , constitutes the ensemble of all traffic signals. We define as the subset corresponding to the traffic signal, encompassing its position denoted as , along with its Signal Phase and Timing (SPaT) information: . Here, signifies the initial indication of the transition time, denotes the cumulative count of traffic signal cycles, and signifies the initial indication of the traffic signal state ( for green and for red). The green and red signal intervals are respectively represented by and (with the yellow signal being treated as red for safety considerations).
Equipped with a vehicle-to-infrastructure (V2I) communication device (such as 4G or LTE-V), the host vehicle possesses the capability to access critical traffic-related information. This encompasses details like route distance, SPaT data of traffic signals, and prevailing speed limits. This real-time information is made available through seamless communication with Road Side Units or the Cloud. Within this framework, the defined road speed limit parameters are denoted as and , where and respectively denote the minimum and maximum speed limits pertaining to road segments linking intersections. The position of the traffic signal is within the range [0, ], and the set of all signals is . The distance between two traffic signals and is calculated as 1, 2:
3.2. Vehicle dynamics
The proposed system is based on a daily driving scenario. The electric motor in an EV is responsible for providing the force needed to move the vehicle forward. It converts electrical energy stored in the battery into mechanical energy, which is then transmitted to the wheels via a drive-train system. The motor torque is controlled by the power electronics system in response to the driver’s accelerator pedal input. When the driver releases the accelerator pedal, the vehicle’s kinetic energy is converted back into electrical energy through the process of regenerative braking. This energy is stored in the battery for later use and reduces the amount of energy that needs to be supplied by the battery during subsequent acceleration. Equations 3 and 4 present the longitudinal dynamics of the vehicle.
In the context of this study, the symbols d and w symbolize the vehicle’s position and velocity, respectively. denotes the vehicle force, where its positive value corresponds to propulsive action, while a negative value signifies braking. The mass of the vehicle is represented by m, signifies the vehicle’s rotational inertia coefficient and g pertains to the acceleration due to gravity. The variables f and , respectively, stand for the rolling resistance coefficient and the aerodynamic drag coefficient. A represents the frontal area of the vehicle, indicates the air density, and characterizes the gradient of the road.
In addition to regenerative braking, EVs also use friction brakes to slow down or stop the vehicle. The friction brake system in an EV works similarly to that in a traditional internal combustion engine (ICE) vehicle. When the brake pedal is pressed, brake pads are pressed against the rotors, creating friction and slowing down the vehicle. However, the use of regenerative braking means that EVs rely less on their friction brake systems than ICE vehicles. This reduces wear and tear on the brake system components, resulting in lower maintenance costs for EVs. Equation 5 shows the evaluation of vehicle force in this system.
The desired force of the electric motor is denoted by , and the transmission ratio, including the gearbox and final drive, is represented by . The driveline efficiency is denoted by the symbol . The EV’s wheel force is impacted by the strategies utilized for allocating propulsion and braking torque.
3.3. Battery and Motor Model Quasi-Static
Considering the working efficiency of the motor, the energy loss of the motor was calculated using the quasi-static model. For electric vehicles (EVs), the vehicle force during propulsion is generated by the electric motor, while the vehicle braking force includes both the motor generation and friction braking forces. Therefore, the total vehicle force can be expressed by Equation 6, where is the motor power and is the power loss.
Regarding Equation 7, represents the radius of wheels, and presents the speed of motor rotations.
When the vehicle is moving, the battery supplies power, and when the vehicle is in regenerative braking mode, the battery recovers energy. Equation 8 is used to calculate the instantaneous power needed by the battery. A simplified equivalent circuit model was employed to capture the battery dynamics, where the accessory power is included. Sign( ) is the signum function.
Equation 9 is utilized to compute the rate of change of the battery’s state of charge (SOC).
The open-circuit voltage , internal resistance , and maximum capacity are represented in the equation. The battery power loss, , was calculated using Equation 10. Additionally, the accessory power, , was taken into consideration, and a simplified equivalent circuit model was used to represent the battery dynamics.
The battery current is obtained from the expression . Furthermore, the battery life is taken into account during vehicle speed optimization through the state of health model. Since the discharge/charge rate and depth of discharge are regarded as the primary factors that cause battery aging, a semi-empirical model that is commonly used is used here to compute the battery capacity loss .
3.4. Control Framework and Problem Formulation
In this section, we describe the Optimal Control Problem (OCP) for Energy Adaptive Driving (EAD), which aims to minimize both energy consumption and travel time while driving through multiple signalized intersections. We also present the framework of the M-EAD strategy, which addresses this OCP.
We have established two prevailing approaches for guiding a vehicle along a path with multiple intersections: the Constant Speed (CS) strategy and the Intersection-based Eco-Driving (I-EAD) strategy. The CS strategy emulates the behavior of a vehicle operated by a human driver, maintaining a constant velocity and uniformly decelerating to a halt upon encountering a red traffic signal. Subsequently, it accelerates steadily until reaching the desired velocity when the signal turns green. Illustrated in Figure 1, the blue dashed line delineates the characteristic trajectory of the CS strategy, characterized by recurrent stop-and-go patterns leading to amplified energy consumption and travel delays.
In contrast, the I-EAD strategy endeavors to optimize the vehicle’s speed profile for efficient intersection passage. This is achieved by orchestrating a trajectory that enhances the vehicle’s ability to traverse intersections seamlessly. The trajectory corresponding to the I-EAD strategy is depicted by the dashed-dotted line, where a delay is incurred at the third intersection. To overcome this limitation and elevate the driving experience, this research formulates an Optimal Control Problem (OCP) within the realm of multi-intersection eco-driving control. The primary objective of this endeavor is to optimize the vehicle’s speed profile over the entire mission duration while factoring in critical variables such as energy losses, travel time, battery health, and driving comfort. As depicted by the green solid line in Figure 1, this approach materializes as the trajectory of the Multi-Intersection Eco-Approach and Departure (M-EAD) strategy, attaining an optimal solution for the OCP. This strategic trajectory optimization not only ensures energy efficiency but also mitigates travel time and battery degradation, all while upholding the quality of driving comfort.
The formulation of the Optimal Control Problem (OCP) represents a profoundly intricate optimization challenge, characterized by a lack of convexity. This complexity stems from the presence of nonlinear objectives, encompassing factors such as battery and motor losses, along with battery capacity degradation. Additionally, diverse constraints further compound the intricacy, spanning aspects like initial and terminal boundary conditions, state limitations, control boundaries, and mixed constraints.
In the higher tier of this approach, the primary focus revolves around the strategic planning of the green signal windows at each intersection. This strategic planning serves the overarching objective of minimizing travel time, thereby augmenting the efficiency of mobility. In the subsequent lower tier, a Receding Horizon Velocity Optimization (RHVO) strategy is introduced. This strategy hinges upon the application of Iterative Dynamic Programming (IDP) techniques, which act as the foundation for determining the optimal speed trajectory. This trajectory optimization process takes into account the simultaneous optimization of energy efficiency, battery longevity, and the quality of driving comfort. This two-stage approach not only addresses energy consumption but also offers a comprehensive solution that extends to battery health and the overall driving experience.
3.5. Speed Prediction Optimization
This section elucidates the intricate process of optimizing the speed trajectory within the spatial domain, leveraging the meticulously derived efficient green signal windows as invaluable inputs. Central to this novel approach is the introduction of the Receding Horizon Velocity Optimization (RHVO) strategy, a pioneering methodology with a tripartite objective: to minimize energy consumption, extend battery longevity, and uphold driving comfort.
By capitalizing on the precomputed efficient green signal windows, the RHVO strategy charts an optimal speed trajectory for connected vehicles, a trajectory that strikes an exquisite equilibrium between energy preservation and travel efficiency. The overarching intent is to propel vehicles through intersections and urban corridors with a finesse that not only conserves energy but also mitigates battery wear and prioritizes the comfort of drivers and passengers.
The essence of the RHVO strategy lies in its capacity to foster anticipatory driving behavior. It empowers vehicles to synchronize their velocity with the upcoming green windows, thereby allowing for seamless passage through intersections while minimizing the need for abrupt accelerations and decelerations. This harmony between vehicle velocity and green signal timing encapsulates the core of energy-efficient driving, mitigating wasteful energy dissipation and reducing wear on the vehicle’s power source.
Furthermore, the RHVO strategy is underscored by a Receding Horizon approach, which confers real-time adaptability to the driving context. By iteratively reassessing and adjusting the speed trajectory within a predictive horizon, the strategy ensures that the vehicle remains responsive to changing traffic conditions. This dynamic responsiveness translates to optimized energy consumption and enhanced battery preservation in the ever-evolving urban traffic milieu.
In essence, the RHVO strategy illuminates a pioneering path toward energy-conscious and battery-aware driving. By ingeniously harmonizing the intricacies of speed optimization with the foresight offered by efficient green signal windows, this strategy emerges as a pivotal tool in shaping the future of connected vehicle mobility. In an era where energy conservation and sustainable transportation stand as paramount objectives, the RHVO strategy presents a remarkable advancement that aligns the interests of energy efficiency, battery longevity, and driving comfort in a seamless and forward-thinking framework.
To achieve this, the RHVO divides the entire route into multiple phases in the spatial domain, with each intersection segment defined as one phase. The boundary conditions, such as vehicle speed and travel time, are used to connect adjacent phases. The receding optimization phase of the entire route is equal to the number of intersections, i.e., k = 1, 2,..., .
In each receding optimization phase, the vehicle’s initial states are the terminal states of the previous phase, i.e., = . This is achieved through a distance-based receding scheme, where the optimization window is defined as a distance interval. An optimal control problem is formulated to minimize energy consumption and prolong battery life while ensuring driving comfort.
4. Simulations and Results
To comprehensively evaluate the efficacy and real-world viability of the proposed M-EAD strategy, a series of rigorous simulations were meticulously conducted. These simulations were carried out on a robust computational platform, featuring an Intel Core i7-8700 @ 3.20 GHz CPU and a substantial 16 GB of RAM. The utilization of this high-performance computing setup ensured the precision and efficiency required for the extensive evaluations that followed.
In the pursuit of a comprehensive assessment, the M-EAD strategy was subjected to dual-phase scrutiny. The initial phase involved a comparative analysis, pitting the M-EAD strategy against benchmark strategies. This comparison unfolded over a predetermined route, where the M-EAD strategy was assessed in the presence of complete Signal Phase and Timing (SPaT) information. This facet of the evaluation aimed to uncover how the M-EAD strategy stood out among established approaches when equipped with rich real-time traffic signal knowledge.
Following the benchmark comparison, the evaluation paradigm transcended deterministic scenarios and delved into the realm of stochastic simulations. This was accomplished through the application of Monte Carlo simulation techniques, a powerful tool that injected variability by randomizing traffic signal initial states in each stochastic iteration. This dynamic approach effectively replicated the unpredictable nature of real-world traffic environments, where signal states can deviate due to factors beyond deterministic control.
The utilization of these two complementary evaluation methods showcases the depth and robustness of the study’s findings. By dissecting the M-EAD strategy’s performance under both idealized and stochastic conditions, the study provides a nuanced understanding of its capabilities across a spectrum of scenarios. This multifaceted evaluation not only underscores the strategy’s resilience but also substantiates its potential to deliver tangible benefits in the intricate and often unpredictable landscape of urban traffic.
The designated test route, situated on Jiangjun Avenue in Nanjing, China, spans a total length of 6794 meters. All Signal Phase and Timing (SPaT) information for the traffic signals distributed along this route remains constant and is succinctly consolidated in Table 1. To strike a harmonious equilibrium between vehicular energy efficiency, travel duration, battery durability, and driving comfort, the weighting factors for the Optimal Control Problem (OCP) are meticulously configured as , , , , and .
In determining the parameter ensemble for the Iterative Dynamic Programming (IDP) technique, a systematic analysis was undertaken, accounting for the delicate balance between computational expediency and optimization precision. While the sampling distance (5m) and time grid size (0.1s) within the IDP framework remain fixed, the initial values of the vehicle speed grid size (10 km/h) and control force grid size (50 N) are subject to iterative scaling employing scaling factors , , , and . The allowance factor assumes a value of 0.95, serving as the threshold that halts the iteration process when the step enhancement achieved by the IDP falls below 5%.
4.1. Reducing the computational burden with IDP
In this subsection, we demonstrate the computational efficiency of IDP compared to DP. The range of the vehicle speed and control force for optimization is illustrated in Figure 2, respectively. It can be observed that IDP reduces the boundary ranges, resulting in reduced computational complexity compared to DP.
The meticulously optimized efficient green windows have been meticulously tabulated in Table 2. A noticeable observation is that, in most instances, the duration of these efficient green windows proves to be shorter than that of their corresponding full green windows. Should the host vehicle be capable of traversing the intersection at the precise commencement of the efficient green window, the potential for curtailing travel delays becomes even more pronounced. However, it is imperative to navigate the intricate equilibrium between mobility enhancements and energy conservation. To grapple with this intricate balance, two subsidiary strategies have been conceived, referred to as M-EAD A and M-EAD B. In the context of M-EAD A, the initiation time of an efficient green window assumes the role of a terminal constraint, warranting the passage of the host vehicle through intersections at an optimal speed designed to minimize travel duration. Conversely, within M-EAD B, the intersection’s passage time is rendered more flexible, albeit remaining confined within the bounds of an interval encompassing the efficient green window. This relaxation serves to align with the overarching objective of energy optimization. To establish an equitable comparison, two iterations of the Constant Speed (CS) strategy have been delineated: CS (M-EAD A) and CS (M-EAD B), corresponding respectively to the average speeds discerned within the realms of M-EAD A and M-EAD B.
The examination of computation time and resultant costs elucidates that the Iterative Dynamic Programming (IDP) approach contributes to a remarkable enhancement in calculation speed by 90%, as evidenced in Table 3 when juxtaposed with the traditional Dynamic Programming (DP) technique. Notably, this efficiency boost is achieved with a minimal concession of optimality, registering a marginal compromise of merely 4.88%. This substantiates the evident advantage of the IDP methodology in terms of computational efficiency when contrasted with the DP methodology.
Table 4 and Table 5 furnish the data and juxtaposed outcomes pertaining to energy consumption, travel time, and battery capacity loss acquired from each methodology. It is pivotal to acknowledge that diverse strategies can yield varying final driving speeds at the destination. To ensure an equitable evaluation, the total energy consumption of each strategy amalgamates both the expended energy and the disparities between the vehicle’s initial and terminal kinetic energies.
As depicted in Figure 3, the host vehicle encountered red signals at the 3rd and 8th intersections for CS (M-EAD A), at the 4th, 6th, 7th, 8th, and 10th intersections for CS (M-EAD B), and at the 5th and 6th intersections for I-EAD, resulting in temporary halts. In stark contrast, both M-EAD A and M-EAD B seamlessly navigated through all intersections without interruption.
Table 4 and Table 5 manifest that both M-EAD A and M-EAD B accomplished reductions in travel time relative to the CS and I-EAD approaches. Nonetheless, it is noteworthy that while M-EAD A exhibits higher energy consumption than CS, M-EAD B achieves dual benefits in terms of energy consumption and travel time reduction compared to CS. In comparison to M-EAD A, M-EAD B curtails energy consumption by a significant 26.50%, accompanied by a mere 9.5% elongation in travel time. Additionally, the battery capacity loss for these three strategies aligns with their respective energy efficiencies.
These findings can be elucidated by the fact that the vehicle under the CS scheme necessitates halts at intersections, introducing heightened energy consumption as depicted in Figure 3. Although the I-EAD approach adeptly optimizes energy-efficient speeds via the utilization of isolated intersection SPaT data, it fails to navigate all intersections without interruptions due to its disregard for spatial-temporal correlations among intersections, as evidenced in Figure 3. Consequently, travel time is prolonged. The marked fluctuations in velocity stemming from stop-and-go actions depicted in Figure 3 further contribute to the elevated energy consumption observed in CS and I-EAD, in contrast to M-EAD B.
Both M-EAD A and M-EAD B tactics optimize the efficient green window at the trip’s outset to mitigate travel delays. Nevertheless, since a shorter travel duration corresponds to a higher average driving velocity that inclines towards elevated energy consumption, M-EAD A demonstrates a slightly greater energy consumption compared to M-EAD B. The latter represents a balanced methodology that embodies a trade-off between energy efficiency and travel time. Additionally, the velocity and acceleration/deceleration patterns of vehicles under M-EAD B exhibit smoother profiles in contrast to CS, I-EAD, and M-EAD A, ultimately yielding an enhanced overall energy efficiency.
Given the superior coordination of vehicle energy saving and traffic efficiency demonstrated by M-EAD B, it is considered representative of the proposed M-EAD strategy and is henceforth abbreviated as "M-EAD". While the effectiveness of M-EAD is promising, it is uncertain whether significant improvements in average vehicle energy efficiency and travel time reduction can be achieved if the initial states of all traffic signals vary. The following Table 6 presents the system improvement over 600 stochastic simulations.
5. Conclusions
In this paper, a pioneering Eco-Approach and Departure (EAD) strategy termed Multi-Intersections-Based EAD (M-EAD) is introduced, catering to the intricate challenges posed by signalized intersections within urban settings. This innovative approach underscores a holistic perspective by considering a comprehensive array of factors encompassing energy consumption, travel time, battery health, and driving comfort. In recognizing the interconnected nature of these variables, the M-EAD strategy strives to deliver a comprehensive solution that not only optimizes energy efficiency but also prioritizes driver experience and vehicle longevity.
The crux of the M-EAD strategy resides in its two-stage control framework that combines the optimization of green signal windows and vehicle speed trajectories. By simultaneously addressing these two fundamental aspects, the M-EAD strategy ensures a harmonious balance between traffic flow dynamics and energy consumption optimization. The Intelligent Dynamic Programming (IDP) algorithm plays a pivotal role in this endeavor, enabling real-time adjustments that are attuned to the evolving dynamics of the traffic environment.
A distinguishing feature of the M-EAD strategy lies in its comparative analysis against the conventional Individual EAD (I-EAD) strategy. The results underscore the substantial enhancements offered by M-EAD, with an average energy efficiency improvement of 7.02% and a notable travel time saving of 14.97% over the I-EAD strategy. These findings illuminate the remarkable potential of M-EAD to revolutionize urban network eco-driving control for connected electric vehicles (EVs). Importantly, the strategy’s effectiveness perseveres even when confronted with varying initial traffic light states, a testament to its adaptability and robustness.
In summation, the M-EAD strategy advances the paradigm of eco-driving control for connected EVs by comprehensively addressing the multifaceted challenges posed by signalized intersections. The paper’s findings underline the strategy’s capacity to harmonize energy efficiency, travel time, battery longevity, and driving comfort, thus fostering a more sustainable and optimized urban mobility landscape. By concurrently enhancing multiple facets of EV operation, the M-EAD strategy emerges as a promising and holistic solution in the realm of urban traffic management and sustainable transportation.
6. Future Research
In the pursuit of more robust and adaptable traffic management strategies, our future endeavors are directed toward enhancing our intersection control framework to seamlessly handle dynamic and evolving traffic conditions. The current landscape of urban traffic is marked by its volatility, with varying traffic volumes, congestion levels, and nonstationary patterns. To effectively navigate this intricate scenario, our research agenda involves the integration of advanced features that enable our system to respond intelligently and proactively. A pivotal aspect of our evolution involves the incorporation of actuated traffic signal support, allowing the intersection control to dynamically adjust signal timings in response to real-time traffic flows. This adaptability ensures that intersections can efficiently cater to changing demand and optimize traffic progression, consequently contributing to energy savings and reduced travel times.
In addition to accommodating actuated traffic signals, our forthcoming developments will address the challenge of nonstationary preceding traffic behavior. The unpredictable nature of driving patterns and the interactions between vehicles pose unique challenges, particularly when it comes to energy-efficient driving strategies. Our research roadmap involves the implementation of intersection pass-through probability prediction, a cutting-edge technique that leverages data-driven models to anticipate the likelihood of vehicles traversing intersections. By preemptively anticipating the behavior of preceding vehicles, our control framework can dynamically adjust speed trajectories, enhance vehicle coordination, and optimize energy consumption. Furthermore, we aim to incorporate an optimal lane selection algorithm that takes into account real-time conditions such as traffic density and signal phases. This enables vehicles to intelligently choose lanes that offer the best chances for efficient passage, thereby minimizing energy expenditure and enhancing traffic flow. The synergistic integration of these advanced features is poised to propel our multiple intersection EAD control framework to new heights, ensuring its relevance and effectiveness in addressing the evolving challenges of urban mobility.
Funding
This research was partially carried out with support from Vinnova (Sweden’s innovation agency) through the Vehicle Strategic Research and Innovation programme, FFI.
Informed Consent Statement
Not applicable,
Conflicts of Interest
The authors declare no conflict of interest.
References
- Oladimeji, D.; Gupta, K.; Kose, N.A.; Gundogan, K.; Ge, L.; Liang, F. Smart transportation: an overview of technologies and applications. Sensors 2023, 23, 3880. [Google Scholar] [CrossRef] [PubMed]
- Djenouri, Y.; Belhadi, A.; Srivastava, G.; Lin, J.C.W. Hybrid graph convolution neural network and branch-and-bound optimization for traffic flow forecasting. Future Generation Computer Systems 2023, 139, 100–108. [Google Scholar] [CrossRef]
- Lan, T.; Zhang, X.; Qu, D.; Yang, Y.; Chen, Y. Short-Term Traffic Flow Prediction Based on the Optimization Study of Initial Weights of the Attention Mechanism. Sustainability 2023, 15, 1374. [Google Scholar] [CrossRef]
- Liu, K.; Xu, X.; Huang, W.; Zhang, R.; Kong, L.; Wang, X. A multi-objective optimization framework for designing urban block forms considering daylight, energy consumption, and photovoltaic energy potential. Building and Environment 2023, 242, 110585. [Google Scholar] [CrossRef]
- Benotsmane, R.; Kovács, G. Optimization of energy consumption of industrial robots using classical PID and MPC controllers. Energies 2023, 16, 3499. [Google Scholar] [CrossRef]
- Zhang, Y.; Kamargianni, M. A review on the factors influencing the adoption of new mobility technologies and services: autonomous vehicle, drone, micromobility and mobility as a service. Transport reviews 2023, 43, 407–429. [Google Scholar] [CrossRef]
- Daniela, A.M.; Juan Carlos, G.P.; Javier, G. On the path to mobility as a service: a MaaS-checklist for assessing existing MaaS-like schemes. Transportation Letters 2023, 15, 142–151. [Google Scholar] [CrossRef]
- Salari, A.H.; Mirzaeinejad, H.; Mahani, M.F. A new control algorithm of regenerative braking management for energy efficiency and safety enhancement of electric vehicles. Energy Conversion and Management 2023, 276, 116564. [Google Scholar] [CrossRef]
- Erdoğan, B.; Tural, M.K.; Khoei, A.A. Finding an energy efficient path for plug-in electric vehicles with speed optimization and travel time restrictions. Computers & Industrial Engineering 2023, 176, 108987. [Google Scholar]
- Yuan, H.; Li, G. A survey of traffic prediction: from spatio-temporal data to intelligent transportation. Data Science and Engineering 2021, 6, 63–85. [Google Scholar] [CrossRef]
- Chen, J.; Xue, Z.; Fan, D. Deep reinforcement learning based left-turn connected and automated vehicle control at signalized intersection in vehicle-to-infrastructure environment. Information 2020, 11, 77. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, Y.; Zhou, Y. Integrated scheduling of zone picking and vehicle routing problem with time windows in the front warehouse mode. Computers & Industrial Engineering 2022, 163, 107823. [Google Scholar]
- Cao, X.; Sun, C.; Yan, M. Target search control of AUV in underwater environment with deep reinforcement learning. IEEE Access 2019, 7, 96549–96559. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, C.; Wei, P.; Zhao, Q. Research on the deep recognition of urban road vehicle flow based on deep learning. Sustainability 2020, 12, 7094. [Google Scholar] [CrossRef]
- Gao, B.; Wan, K.; Chen, Q.; Wang, Z.; Li, R.; Jiang, Y.; Mei, R.; Luo, Y.; Li, K. A Review and Outlook on Predictive Cruise Control of Vehicles and Typical Applications Under Cloud Control System. Machine Intelligence Research 2023, pp. 1–25. [CrossRef]
- Miglani, A.; Kumar, N. Deep learning models for traffic flow prediction in autonomous vehicles: A review, solutions, and challenges. Vehicular Communications 2019, 20, 100184. [Google Scholar] [CrossRef]
- Yu, M. Construction of regional intelligent transportation system in smart city road network via 5G network. IEEE Transactions on Intelligent Transportation Systems 2022. [Google Scholar] [CrossRef]
- Liu, L.; Lu, S.; Zhong, R.; Wu, B.; Yao, Y.; Zhang, Q.; Shi, W. Computing systems for autonomous driving: State of the art and challenges. IEEE Internet of Things Journal 2020, 8, 6469–6486. [Google Scholar] [CrossRef]
- Mehdi, M.Z.; Kammoun, H.M.; Benayed, N.G.; Sellami, D.; Masmoudi, A.D. Entropy-based traffic flow labeling for CNN-based traffic congestion prediction from meta-parameters. IEEE Access 2022, 10, 16123–16133. [Google Scholar] [CrossRef]
- Miglani, A.; Kumar, N. Deep learning models for traffic flow prediction in autonomous vehicles: A review, solutions, and challenges. Vehicular Communications 2019, 20, 100184. [Google Scholar] [CrossRef]
- Shamsaimon, N.; Mat Razali, N.A.; Abd Majid, K.; Ramli, S.; Mohamad Amran, M.F.; Ishak, K.K.; Ahmad, R. Traffic flow prediction using long-short term memory technique for connected vehicles in smart cities. Advances in Visual Informatics: 7th International Visual Informatics Conference, IVIC 2021, Kajang, Malaysia, November 23–25, 2021, Proceedings 7. Springer, 2021, pp. 411–422.
- Zhuang, W.; Qu, L.; Xu, S.; Li, B.; Chen, N.; Yin, G. Integrated energy-oriented cruising control of electric vehicle on highway with varying slopes considering battery aging. Science China Technological Sciences 2020, 63, 155–165. [Google Scholar] [CrossRef]
- Ding, F.; Jin, H. On the optimal speed profile for eco-driving on curved roads. IEEE Transactions on Intelligent Transportation Systems 2018, 19, 4000–4010. [Google Scholar] [CrossRef]
- Mello, E.F.; Bauer, P.H. Energy-optimal speed trajectories between stops. IEEE Transactions on Intelligent Transportation Systems 2019, 21, 4328–4337. [Google Scholar] [CrossRef]
- Zhang, Y.; Qu, X.; Tong, L. Optimal eco-driving control of autonomous and electric trucks in adaptation to highway topography: energy minimization and battery life extension. IEEE Transactions on Transportation Electrification 2022, 8, 2149–2163. [Google Scholar] [CrossRef]
- He, Y.; Zhou, Q.; Makridis, M.; Mattas, K.; Li, J.; Williams, H.; Xu, H. Multiobjective co-optimization of cooperative adaptive cruise control and energy management strategy for PHEVs. IEEE Transactions on Transportation Electrification 2020, 6, 346–355. [Google Scholar] [CrossRef]
- Shao, Y.; Sun, Z. Eco-approach with traffic prediction and experimental validation for connected and autonomous vehicles. IEEE Transactions on Intelligent Transportation Systems 2020, 22, 1562–1572. [Google Scholar] [CrossRef]
- Hao, P.; Wu, G.; Boriboonsomsin, K.; Barth, M.J. Eco-approach and departure (EAD) application for actuated signals in real-world traffic. IEEE Transactions on Intelligent Transportation Systems 2018, 20, 30–40. [Google Scholar] [CrossRef]
- Sun, C.; Guanetti, J.; Borrelli, F.; Moura, S.J. Optimal eco-driving control of connected and autonomous vehicles through signalized intersections. IEEE Internet of Things Journal 2020, 7, 3759–3773. [Google Scholar] [CrossRef]
- Han, J.; Shen, D.; Karbowski, D.; Rousseau, A. Leveraging multiple connected traffic light signals in an energy-efficient speed planner. IEEE Control Systems Letters 2020, 5, 2078–2083. [Google Scholar] [CrossRef]
- Lin, Q.; Li, S.E.; Xu, S.; Du, X.; Yang, D.; Li, K. Eco-driving operation of connected vehicle with V2I communication among multiple signalized intersections. IEEE Intelligent Transportation Systems Magazine 2020, 13, 107–119. [Google Scholar] [CrossRef]
- Dong, H.; Zhuang, W.; Chen, B.; Lu, Y.; Liu, S.; Xu, L.; Pi, D.; Yin, G. Predictive energy-efficient driving strategy design of connected electric vehicle among multiple signalized intersections. Transportation Research Part C: Emerging Technologies 2022, 137, 103595. [Google Scholar] [CrossRef]
- Xie, L.; Luo, Y.; Zhang, D.; Chen, R.; Li, K. Intelligent energy-saving control strategy for electric vehicle based on preceding vehicle movement. Mechanical Systems and Signal Processing 2019, 130, 484–501. [Google Scholar] [CrossRef]
- Wegener, M.; Koch, L.; Eisenbarth, M.; Andert, J. Automated eco-driving in urban scenarios using deep reinforcement learning. Transportation research part C: emerging technologies 2021, 126, 102967. [Google Scholar] [CrossRef]
- Dong, H.; Zhuang, W.; Chen, B.; Yin, G.; Wang, Y. Enhanced eco-approach control of connected electric vehicles at signalized intersection with queue discharge prediction. IEEE Transactions on Vehicular Technology 2021, 70, 5457–5469. [Google Scholar] [CrossRef]
- Yang, H.; Rakha, H.; Ala, M.V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects. IEEE Transactions on Intelligent Transportation Systems 2016, 18, 1575–1585. [Google Scholar] [CrossRef]
- Sciarretta, A.; Vahidi, A.; others. Energy-efficient driving of road vehicles; Springer, 2020.
Figure 1.
Overview of the presented system
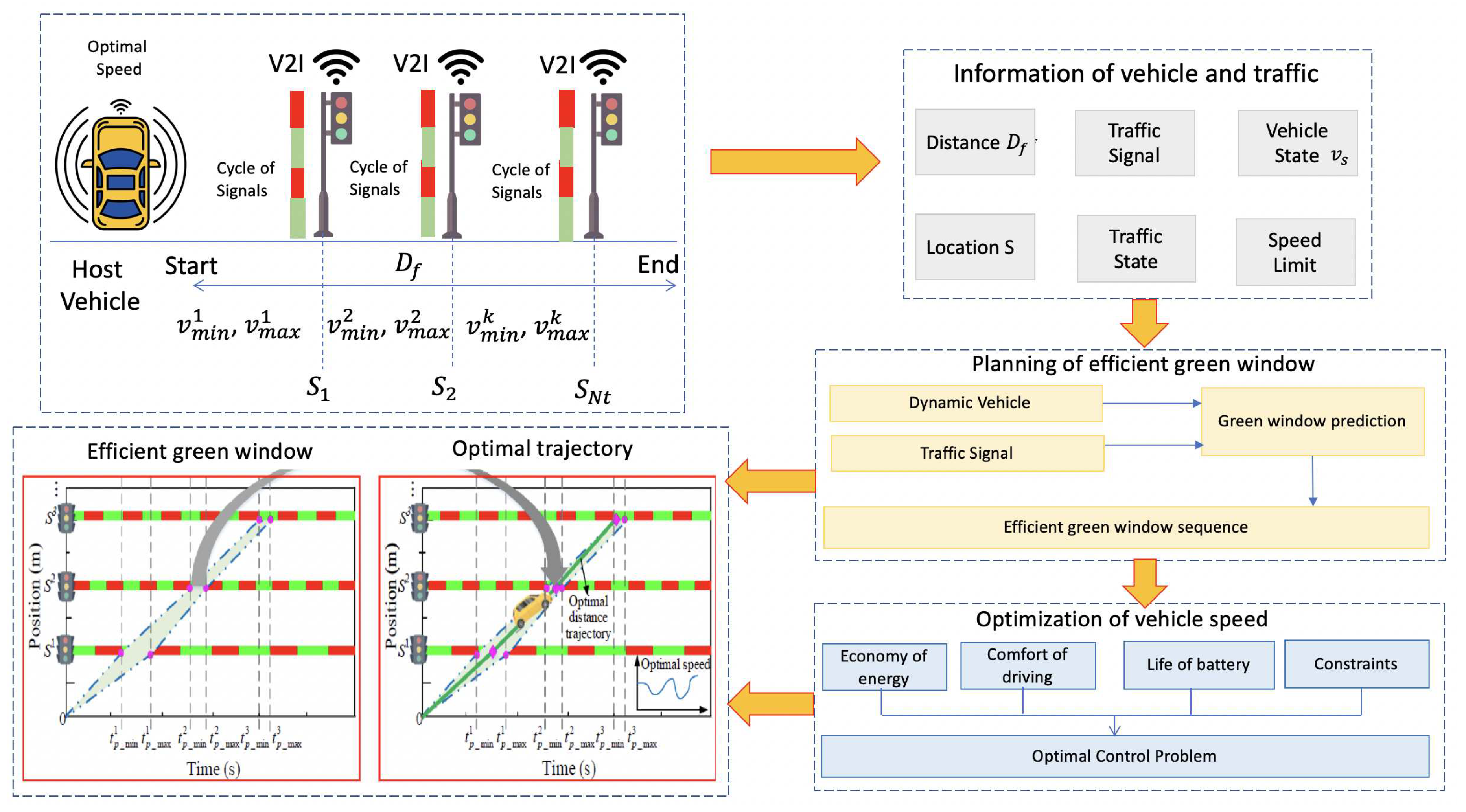
Figure 2.
Vehicle speed and control boundary
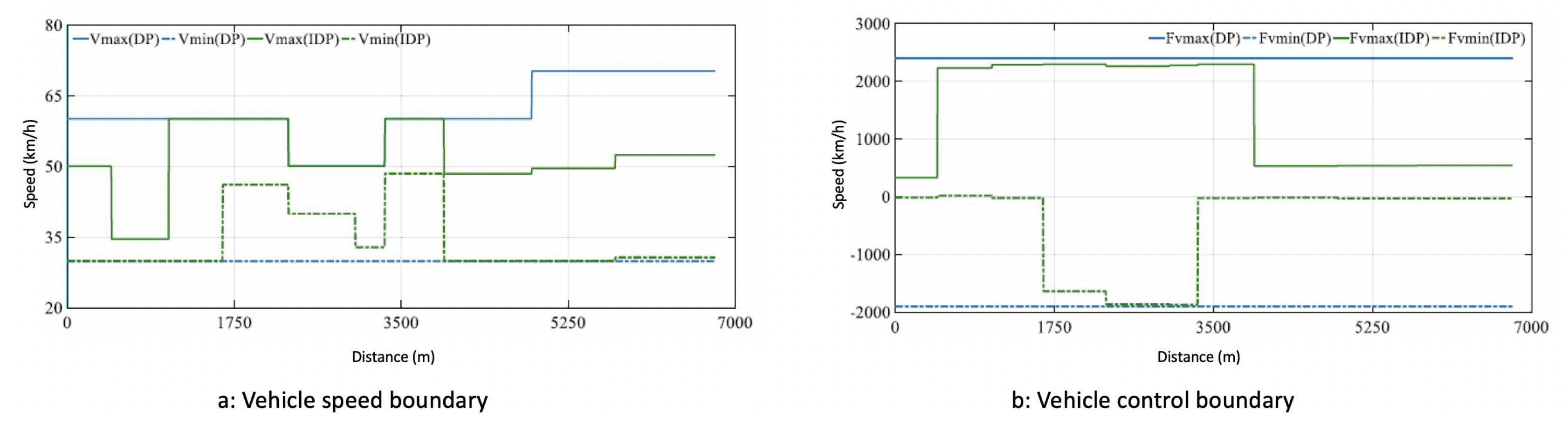
Figure 3.
Simulation of vehicle speed and distance profile


Table 1.
Road speed limit and traffic signal information
| Location (S) |
Green Signal |
Signal Cycle time |
Indication of Signal P |
Transition Time |
Max Speed (km\h) |
Min Speed (km\h) |
|---|---|---|---|---|---|---|
| 460 | 28 | 97 | Red | 26 | 60 | 30 |
| 1625 | 48 | 97 | Red | 9 | 60 | 30 |
| 3015 | 40 | 86 | Green | 6 | 50 | 30 |
| 3945 | 34 | 105 | Red | 62 | 60 | 30 |
| 5740 | 35 | 97 | Red | 34 | 70 | 30 |
Table 2.
Green window planning results
| Intersection ID | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Signal cycle of efficient traffic |
7 | 5 | 4 | 3 | 5 | 4 | 3 | 2 | 2 | 1 |
| Green window interval (s) |
[499, 546] |
[430, 460] |
[380, 411] |
[277, 312] |
[240, 269] |
[228, 270] |
[190, 220] |
[110, 160] |
[80, 127] |
[30, 60] |
| Efficient green window interval (s) |
[499, 546] |
[427, 460] |
[380, 415] |
[299, 310] |
[280, 270] |
[240, 250] |
[190, 195] |
[111, 150] |
[80, 116] |
[31, 60] |
Table 3.
IDP and DP comparison
| Parameter | Time of calculation | Cost | ||
|---|---|---|---|---|
| Reduction | Value | Increase | Value | |
| IDP | 90% | 240.9s | 4.88% | 56200.87 |
| DP | - | 2160.5s | - | 53213.90 |
Table 4.
Simulation results of defined strategies
| Strategy | M-EAD A | M-EAD B | I-EAD | CS (M-EAD A) | CS (M-EAD B) |
|---|---|---|---|---|---|
| Capacity of battery | 0.0017% | 0.0014% | 0.0015% | 0.0017% | 0.0016% |
| Time of travel | 498.5 s | 540.4 s | 629.5 s | 511.3 s | 674.9 s |
| Energy consumption | 2666.95 kj | 1922.94 kj | 2179.65 kj | 2689.52 kj | 2398.24 kj |
Table 5.
Comparison of M-EAD, CS and I-EAD strategies in terms of battery life, travel time, and energy efficiency
Table 5.
Comparison of M-EAD, CS and I-EAD strategies in terms of battery life, travel time, and energy efficiency
| Strategy | I-EAD | CS (M-EAD A) | CS (M-EAD B) | |
|---|---|---|---|---|
| Extending the battery life | M-EAD A | -14.29% | 0% | 13.34% |
| M-EAD B | 7.14% | - | - | |
| Reduction Time of travel | M-EAD A | 20.87% | 2.49% | - |
| M-EAD B | 14.22% | - | 19.98% | |
| Energy efficiency | M-EAD A | -24.05% | 0% | - |
| M-EAD B | 7.58% | - | 16.41% | |
Table 6.
The average improvement in energy efficiency, reduction in travel time, and reduction in battery capacity loss were computed over 600 stochastic simulations.
Table 6.
The average improvement in energy efficiency, reduction in travel time, and reduction in battery capacity loss were computed over 600 stochastic simulations.
| Improvement of energy efficiency | Avg. reduction of battery capacity | Avg. reduction of travel time | |
|---|---|---|---|
| M-EAD / I-EAD | 7.02% | 5.06% | 14.97% |
| M-EAD / CS | 11.04% | 10.90% | 16.78% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



