Submitted:
30 August 2023
Posted:
31 August 2023
You are already at the latest version
Abstract
Ensuring fire safety is an important condition for the successful operation of industrial enterprises. It is necessary to detect the threat of fire before ignition. An indicator of danger is the appearance of gas, which occurs as a result of unauthorized heating of equipment. Gas sensors make it possible to detect the appearance of gases characteristic of the decomposition of materials at the stage of smouldering and pyrolysis, which cause a change in the composition of the atmosphere. This paper presents a mathematical method for the rational placement of gas analyzers for premises of potentially hazardous industries. It is the rational placement of gas sensors, which ensures safety, taking into account economic feasibility that determines the effectiveness of their use. For the first time, the analysis of gas accumulation during the movement of the flow from the source to the ceil-ing, then propagation to the location of the sensors, is used for the first time to select the placement of gas sensors. Depending on the permissible values of the gas volume, the placement and number of gas sensors are selected. The calculation of the conditions for the rational placement of gas sen-sors for the most common indicators, such as carbon monoxide and hydrogen at different sizes and heights of rooms, is carried out. The method of calculating the location of gas analyzers makes it possible to diagnose and predict fire hazard at technological facilities on the basis of gas control, and compare the obtained values with the maximum permissible values. This method provides cal-culation of the coordinates of the gas source from the coordinates of the triggered sensors. Knowing the coordinates of all sensors, the coordinates of the sensors that gave the alarm, and the formula for determining the volume of the gas cloud under these sensors, it is possible to assess the localization of the source of dangerous gas in the protected room. This increases the efficiency of the fire safety system. The method makes it possible to control the layout of sensors depending on the volume of protected premises, types of production, the creation of new sensors, changes in the composition of hazardous gas in different technological conditions.
Keywords:
Gas Sensors
; Mathematical Model
; Rational Location
; Automated System
; Early Fire Detection
; Gas Control Systems.
1. Introduction
Timely detection of fire hazards is a critical condition for ensuring safety in agriculture, industry and the environment. In systems for early detection of fire hazards at industry, highly sensitive gas analyzers are used; in which sensors ensure the fixation of trace concentrations of hazardous gases. They are used to detect the possibility of ignition by gas emission at the stage of smouldering (decomposition) and pyrolysis (overheating).
Most of the combustible substances are organic compounds, the smouldering or combustion of which emits carbon dioxide CO2 and carbon monoxide CO. The sensor is a sensitive element of the gas detector, which registers an increase in the concentration of these gases and gives a signal that the specified limit of the controlled parameter is exceeded. When smouldering, the concentration of CO increases from 20 to 100 mg / m³, but when a flame appears, it decreases. Also, during the smouldering of organic materials, hydrogen, H2, is released, the concentration of which, up to 10 mg / m³, can be detected in the presence of semiconductor sensors. When a small amount of material smoulders, the concentration of hazardous gases is small and they are distributed in the volume of the room due to diffusion. For gas detectors reacting at this stage of the fire, the requirement for the sensitivity threshold of the sensors is from 0.0001% for CO and 0.00001% for H2 [1,2].
The installation of gas control systems in the protected room makes it possible to detect the appearance of gases characteristic of the decomposition of organic materials, including insulation of cables, packaging, wood, fabrics and much more [3]. Thermal degradation in different materials begins at different temperatures, but it is ahead of the appearance of smoke. The heating process is slow. At the same time, the physical principles underlying the operation of the fire sensors used (temperature increase, light scattering by smoke particles, ion current due to radioactive ionization of smoke) reliably register a fire already at the combustion stage, when an open flame appears, which is accompanied by a strong change in the physical properties of the surrounding air [4]. A fire at the open flame stage cannot be eliminated by technical measures by changing the operating mode, for example, turning off the equipment.
A reliable way to prevent a fire at an early stage preceding a fire is to control the chemical composition of the air, which changes dramatically due to thermal decomposition, pyrolysis, overheating and smouldering of combustible materials [5]. It is at this stage of the development of the fire that the necessary measures can be taken to extinguish it, and in case of overheating of electrical equipment and cables, they can be automatically turned off in time by a gas sensor signal.
Gas sensors are used all over the world in various fields as fire sensors to improve the reliability of fire safety systems [6,7,8,9,10,11,12]. However, the developed norms and guidelines do not consider methods for the rational arrangement of sensors. A set of rules for the design of fire protection systems was developed by the Ministry of Emergency Situations of Russia for timely and reliable fire detection, providing information to the personnel on duty [6]. The placement of gas analyzers for plant protection systems and life safety is presented in [7], guidelines for the use of stationary or portable gas detectors are proposed in [8]. The use of gas sensors in industry, as well as in other areas is considered [9,10]. The application of gas detectors for real-time detection of chemicals in the workplace is discussed in [11]. The use of gas sensors for stationary and portable gas detection in industrial processes associated with the use and production of hazardous substances, especially toxic and combustible gases, is discussed in [12].
Guidance on the placement of individual sensors on combustible gases in rooms is given in [13]. The main recommendations for the selection of fire and gas detectors are presented in [14]. The placement of sensors in industrial premises is not regulated in these rules and recommendations. In [15], modelling is used to optimize the location of sensors for early detection of a gas cloud. In operation [16], the system with the microcontroller should detect a gas leak; issue a warning via SMS and turn on the fire extinguishing system. A formulation of nonlinear programming with a mixed integer was proposed for the optimal placement of flame detectors, taking into account the non-uniform probabilities of detection failure [17]. An approach to a fire detection system in valuable forests is proposed, which can detect fires from the earliest stage using a mathematical model of the detector geometry [18].
A holistic approach to fire safety design, which describes fire models, is discussed in [19]. An attempt to create an integrated automated system for early detection of fires and environmental monitoring was made in [20]. Gas sensors and methods of their placement are necessary to ensure fire safety of underground structures [21].
The author has developed network models for analyzing the flows of hazardous products to ensure the safety of oil refineries with practical application at the Moscow Refinery and the Ryazan Refinery [22,23,24]. A network of branches is a tensor; Different connections of branches, structures, are considered as projections of the tensor into different coordinate systems. Coordinates are paths, lines passing through branches. Closed and open paths form orthogonal subspaces in the tensor network, the dimension of which changes as the connections change. In a dual network, connections correspond to breaks, and vice versa. The sum of the dimensions of the subspaces of closed and open paths in the two networks remains constant. The duality invariant connects the transformations of the structure [25].
The duality of the networks made it possible to represent mass flows in the distillation column as a contour network with a basis of closed paths, and heat flows as a nodal network with a basis for open paths. This made it possible to propose the placement of pressure sensors in the elements of the installation that determine the basic closed paths, and temperature sensors in the elements that determine the basic open paths. The analysis shows where the maximum permissible values are exceeded when the network branches are broken, which simulate accidents at the installation.
In all cases, with the actual size of the production, it is necessary to place the sensors taking into account the requirements and conditions of ensuring safety.
The article presents a method for rational placement of sensors in production conditions for early warning of a possible fire. The method makes it possible to create sensor placement schemes depending on changes in the size, volume and shape of protected premises, types of production, creation of new sensors, changes in the composition of hazardous gases in different technological processes. The method allows you to adjust sensor technologies: change the layout depending on the increase in the sensitivity of the sensors, on changing the shape and size of the room, the requirements for the maximum permissible volumes of hazardous gases at the stages of smoldering, before the occurrence of a fire.
It is assumed that in case of malfunctions, heating, dangerous light gases appear, for example, CO and H2, which rise to the ceiling of the room where the sensors are located. The physical foundations of the first stage of the process of gas propagation from the heating source to the ceiling of the room were considered in [26,27]. The volume of gas accumulated during the ascent spreads along the ceiling, reaches the sensors, which give a signal about the danger and the need to take measures to prevent fire. According to the coordinates of the sensors that gave a signal about the appearance of hazardous gases, it is possible to localize the location of the heating source, and automate the warning of a possible fire.
The article presents a method for determining the rational locations of gas sensors that respond to an increase in the concentration of carbon monoxide (CO) and hydrogen (H2) during early fire detection. Based on the analysis of the flows of hazardous products, a safety model in technological systems has been developed. The calculation determines the number and location of gas sensors necessary to ensure the required technical safety of the premises, depending on the sensitivity of the sensors, the height and area of the room, convective flows, etc.
2. Location Methods for Gas Fire Sensors
2.1. Problem Statement
The volume of the production room is filled with air. The boundaries of the room are the floor, ceiling and walls. In the room there is equipment that performs a technological process with a potential fire hazard. A harbinger of fire is the appearance of gas, which occurs as a result of unauthorized heating of equipment or premises.
It is necessary to place gas fire sensors (GFS), which will record the appearance of indicator gases such as H2 and CO. The sensor signal will allow you to determine the possible localization of combustion products in the room to eliminate heat sources and prevent fire, or take measures to extinguish the fire. The H2 and CO gases that appear as a result of heating are lighter than air, and therefore will rise upwards. In addition, the density of the heated gas is less than the density of the air, so it is affected by a lifting force equal to the weight of the volume of air displaced by the gas.
It is assumed that the most likely sources of gas are in the area of the floor where the equipment is located, and there is a risk of fire or explosion. The controlled gases propagate upwards and to the sides, so the gas sensors must be positioned at the top in such a way as to ensure that low concentrations of H2 and CO are recorded before the concentration of the gas emitted reaches a dangerous value.
There are various configuration options for gas sources (emissions):
- -
- At the point,
- -
- At several points,
- -
- In the direction of the line (crack),
- -
- On a surface area (surface rupture).
The release of gas through a line or surface can be thought of as a generalization of the release through a point. It can be assumed that the air in the room is stationary (or its movement can be neglected), and the air is “transparent” to the spread of gas.
The placement of sensors should ensure contact with gas molecules when the accumulated volume does not exceed the maximum permissible values set by safety standards.
2.2. Methods of placement of gas sensors
There are various methods to solve this problem. For example, you can consider the physics of the process from the standpoint of the location of gas sensors. The power density methods and the location of the lamps solve the problem from the perspective of the location of the gas sensors. It is assumed that the gas analyzer has a “range”. The point method uses analogies with the luminous flux reaching the room areas that need to be illuminated. The disadvantage of these methods is the assumption that the GFS itself reaches the place of possible occurrence of danger.
In reality, the gas analyzer is in place, waiting for the molecules of the substance to enter the inlet in order to then send a signal to the security system. For this reason, this paper uses the method of considering the movement of hazardous gas molecules from the place of danger in the direction of gas sensors.
The challenge is to determine how many gas sensors are needed and how to place them in order to detect and locate possible gas emission sites in a timely manner and monitor the permissible hazardous concentration. This method of placing the GFS solves the problem from the position of gas movement from sources near the floor of the room where the equipment operates, in the direction of the location of gas sensors on the ceiling of the room.
2.2. Physical Model of the Gas Movement Process
Gas can appear as a result of heating the equipment located below, so the gas will rise up. The density of the heated gas is less than the density of the air, so it is affected by a lifting force equal to the weight of the volume of air displaced by the gas. Practice shows that in the source the concentration (dynamic ratio) can be 300-350 ppm (parts per million), and on the ceiling at a height of H = 5-6 m, the concentration will be 80-90 ppm. In this case, an approximate concentration gradient is set, which can be considered as a potential difference.
Let the heat source heat the solid material, converting it into a gaseous state. The pressure acts the same in all directions, but under the influence of heating, the gas mainly moves upwards, creating convection currents. There is a stream of gas molecules that occupy a certain volume at the heating site at floor level. Let us assume that the source has a constant intensity, i.e., the same number of gas molecules appear every second. At constant pressure, the molecules occupy the same volume at any given moment, creating a cloud of gas step by step.
As the gas cloud propagates, it moves upward. Random factors (convection, turbulence, etc.) give the gas cloud a configuration that is difficult to predict. With a high degree of certainty, which is sufficient to solve the problem, we will assume that the gas cloud has the shape of a cone. In the process of movement, the cone occupies all new layers with a vertex at the ejection point. Rising, the gas cloud will touch the ceiling of the room, and then spread along the ceiling in all directions, falling into the GFS location areas.
The gas cloud will spread across the ceiling and reach one or more gas sensors, which will signal the presence of gas in the room. According to the coordinates of the SFS (gas sensors) that gave the signal, it is possible to solve the inverse problem of determining the location of the gas source on the floor.
Thus, the three-dimensional problem is reduced to a two-dimensional problem. The circle of gas on the ceiling that reaches the sensors must have a square that corresponds to a volume of gas less than the maximum permissible value.
The leading edge of the gas cloud on the ceiling will reach one or more gas sensors, which will signal the gas presence in the room. According to the GFS (gas sensors) coordinates that signaled, it is possible to solve the inverse problem in order to determine the location of the gas source on the floor. Thus, the three-dimensional problem is reduced to a two-dimensional problem - the need to rationally place the GFS on the room ceiling so that they are touched by the boundary of the gas propagation circle of a certain diameter.
The analysis shows that at an equal density in the gas cloud, the propagation rate changes in proportion to the cubic root of the time elapsed since the appearance of the source. With this dependence, the rate of gas propagation decreases rapidly with distance from the source.
2.2.1. Movement of gas from the source of danger to the ceiling of the room
Heating or a chemical reaction converts a substance that can cause a fire from a liquid or solid state to a gaseous state. The gas occupies a larger volume than the source substance, and this excess, which creates pressure, begins to push the gas molecules into the environment. They penetrate between air molecules, spreading throughout the room. The mass of the gas mg ejected in the first time interval (per second) is equal to the density of the gas q multiplied by the volume of the cone V (the radius of the base r and the height h) that the gas will occupy.
mg = V q = 1/3 πr2 h q
- where:
- mg – gas mass, mg;
- V – cone volume, m3;
- r – cone base radius, m;
- h – cone height, m;
- q – gas density, mg / m3.
The concentration unit is ppm (parts per million). With a constant source power, the same gas mass mg will be emitted in each unit of time. The main parameters reflecting the state of the gas are the dynamic pressure P, temperature and density q. In this case, the task is to determine the release of gas, the appearance of hazardous substance molecules. Thus, the physical effect of a fire hazardous process is the dynamic pressure created as a result of the emergence and propagation of gas molecules. In addition, the temperature decreases from the source to the GFS location.
The gas is formed as a result of pyrolysis (thermal decomposition). Heating can lead to fire, explosion, etc. The heated exhaust gas (H2, CO) tends to rise. The pressure on the gas acts in all directions. In addition, the gas molecules are affected by heating and buoyant force directed upwards, so the gas cloud takes on an upward shape. With a good approximation, we can assume that this is the shape of a cone. The top of the cone at each moment of time rests on a source of dangerous gas, where pressure is created.
As time passes, the gas occupies new layers of the truncated cone. Let the source have a constant intensity, i.e., emits the same number of mg molecules in each time interval. Then the layers of the cone have the same volumes for each time interval. The density of the gas during propagation remains constant q = const. This is a stronger condition than the assumption that the density gradually decreases as it moves towards the ceiling. Let us consider a change in the gas velocity under the condition of a constant flow of molecules emanating from the source and a constant gas density in a gas cloud.
Suppose that in the lower part of the room, near the floor, the pyrolysis process has begun due to heating, or for other reasons. The source has a local character, which can be represented as a point (see Figure 1). Under the influence of pressure, gas molecules spread evenly, creating a cone-shaped cloud, penetrating between air molecules, displacing them, as well as each other. It is assumed that the intensity of the source is constant. For this reason, the number of molecules in all layers of the gas cone per unit time must be the same.
The cone volume occupied by the gas at the first moment of time will be:
where h1 – cone height, r1 – cone base radius, S – cone base area.
V1 = 1/3 h1 π r12 = 1/3 h1 S,
As you can see in Figure 1, the cone radius is equal to the height multiplied by the tangent of the angle а (equal to half the angle of the apex of the cone). Then the volume of the cone V can be expressed in terms of the cone height h and the angle α.
V = 1/3 π h3 tg2 α.
The cone height is the distance traveled by the leading front of the gas per unit time, which is numerically equal to the velocity of gas propagation in the first period. Strictly speaking, for this reason, if the cone top is located in the source at the bottom, then the base at the top should have a convex spherical shape.
During the second period, per unit of time, the gas will spread further, occupying the next layer of the cone. The volume of this layer is equal to the volume created in the first unit of time. From here you can find out the estimated speed of gas propagation. Each layer of the gas volume increment has the shape of a truncated cone.
Let the angle of the cone α = 45o. During the second period, the gas will occupy the volume V2. Since the power of the source is constant, then the volume increment, the layer dV2, which the gas occupies in the second unit of time, is equal to the volume that the gas occupied in the first unit of time V1. The volume increment layer dV2 has the shape of a truncated cone. Its volume is equal to the difference between the volume V2 = 1/3 π r23 = 1/3 π h23 and the volume of the cone V1 = 1/3π r13 = 1/3 π h13. Then one can write that
where dV2 is the increase in the volume of gas propagation in the second unit of time; whence we get that V2 = 2 V1 = 2/3 π r13 .
dV2 = V2 – V1 = 1/3 π r23 – 1/3 π r13 = V1,
Hence it follows that the radius of the truncated cone r2 is equal to
Similarly, we obtain that the radius of the third cone r3 is equal to
Continuing step by step to consider the sequential movement of truncated cone layers from the gas source, we will thus obtain that in time t = n the gas will propagate to a distance
There will come a moment when the next layer (the base of the truncated cone) reaches the location of the gas sensors at the level of the room ceiling. Further, the gas area will begin to spread along the ceiling in concentric circles. The cloud boundary will reach one or more gas sensors and the security system will signal the presence of gas. Let the angle of the cone apex be α 0, (expressed in angles or radians). The volume of the cone V through the height of the cone h and the angle α, at the first unit time.
V1 = 1/3 π h13 tg2α,
Comparing the expressions for volumes at the first and second unit’s time, we obtain that the second height is expressed in terms of the first height as
Thus, the increase in height, and hence the rate of gas rise, does not depend on the angle at the cone base at a constant power of the gas source. The expected vertical gas velocity is equal to the difference in the heights of the gas cloud cones per unit time:
Thus, the room heights, the intensity of the gas source (the number of molecules that flow out per unit of time and occupy a certain volume) are given. It is necessary to calculate the time for the gas cloud to reach the room ceiling at the level of the gas sensors, and the time it takes for it to reach one of the sensors.
Since each height increment is created per unit time, the height increment is numerically equal to the upward gas velocity, which is shown in formula (6).
The time to reach the room ceiling is equal to the number of unit layers of the cone t = n, at which the total cone height of the gas cloud hn becomes equal to the height of the room H. The upward velocity of the gas, v, will decrease in proportion to the increase in the area of the cone layers base.
Height H, the level of gas sensors location will be reached in time t, equal to the number of layers of gas n when it propagates to the ceiling t = n
The volume of the initial gas emission depends on the magnitude of the angle of the base of the cone. If we assume that the angle at the base of the cone is 60 degrees, then the initial volume will be three times less than for an angle of 90 degrees. The radius of the gas cloud on the ceiling will be smaller. The speed of movement along the ceiling to the locations of gas sensors will also change.
Consider an example of calculating the time and speed of gas propagation in a room. Height values are selected taking into account the technological features of the protected premises.
Let the Room Height be 4 m. Let’s take a second as a unit time. The gas ejection cone in the first second has a height of 1 m, the cone apex angle is equal to the right angle, 90°, i.e., the cone radius is equal to the height, r = h, the gas source has a constant intensity. Table 1 gives the characteristics of the cloud: the cone height over time, the velocity of the upward gas propagation, and the volume dynamics of the gas cloud. It shows the time during which, under given conditions, the gas cloud reaches the height of the ceiling, and the accumulated volume of gas in the room.
At 64 seconds, the gas cloud reaches the ceiling. The accumulated volume of gas in the room is the circle radius, the cone base is equal to the cone height, therefore, is 4 meters, and then the gas begins to spread horizontally under the ceiling. A similar calculation shows that at a room height of 6 m, the gas reaches the ceiling at 220 seconds from the start of the ejection.
2.2.2. Gas movement from the place of reaching the ceiling to the sensors
After raising the gas cloud to the ceiling, we get a circle at the top, the dimensions of which may be less than the distance between the sensors. The gas will spread across the ceiling until it reaches the sensor, which will generate an alarm, i.e., report the danger.
Suppose that when moving along the ceiling, the thickness of the gas layer is constant, and is equal to the height of the last layer of the truncated cone that reached the ceiling. In Table 1, the thickness of the gas layer at the ceiling was equal to 0.0207 m. For each subsequent period of time (second), a ring of gas diverges along the ceiling, the volume of which is equal to the previous volumes (assuming a constant intensity of the gas source). When the ceiling is reached, the area of the circle Sn is equal (if the angle of the cone is 900):
Sn = π rn2 = π hn2 = π H2
This is a two-dimensional case of the pattern that is considered in the analysis of the rise of a cloud of gas to the ceiling. That is, each ring that spreads across the ceiling has the same area as the circle, the base of the cone, a cloud of gas that has risen to the ceiling.
In the second period, the gas will spread further, occupying the next ring. The area of the second ring, as well as subsequent rings, is equal to the area of the base of the cone. From here we find the rate of gas propagation. For the second period of time, gas will occupy an area of Sn+1.
Sn+1=πrn+12
Since the power of the source is constant, the increment of the area of the circle, the ring, dSn+1, occupied by the gas for the second unit of time, is equal to the area S1, occupied by the gas for the first unit of time. The area of the ring is equal to the difference between the area Sn+1 = π rn+12 and the area Sn = π rn2 . Then we get that
where dSn+1 is the increment of the gas propagation area for the second period of time of movement along the ceiling; from where we get that Sn+1 = 2 Sn = 2 π rn2. It follows that the radius of the ring rn+1 is
d S n+1 = S n+1 – Sn =πr n+12 –πrn2 = Sn,
Reasoning similarly, we get that in the third period of time the gas will occupy a ring of radius rn+2.
Continuing to consider the sequential propagation of the rings, we obtain that during the time t = n + m the gas will propagate over a distance
Two points in time are of interest. The first is when the radius of the ring exceeds the distance between the sensors. From this point on, gas detection is guaranteed. The second point is when the radius of the ring reaches the size of the room. From this point on, we can assume that the room is filled with gas.
Table 2 shows the calculation of the gas propagation on the ceiling before reaching the sensor. Further, the movement of gas to the boundaries of a square room, with a side of 15 m.
The first column shows the time elapsed since the beginning of the movement of the gas cloud on the ceiling. The radius of the ring is calculated by formula (12). The distance between the sensors is A = 6 m. In this case, the radius of the ring is equal to A at 40 seconds; the volume of gas will be 109 m3. The gas reaches a distance of 6 m to the walls of the room in 80 seconds. At the distance between the sensors A = 5, the radius of the ring is equal to A at 25 seconds, the volume of gas will then be 93 m3.
The intensity of the source determines the rate of propagation of the gas. At the same time, the higher the velocity of the gas, the faster it will reach the sensor layer and will be registered. In this respect, the power of the source and the increase in the dangerous volume of gas are not directly proportional. This dependence can be widely neglected. The amount of gas in the hemisphere under the ceiling is proportional to the volume and density of the gas. The assumption that the gas propagates in a hemisphere of the same density is sufficient to ensure a level of safety, since it is a stronger condition than would be necessary if the density of the gas decreases as it moves away from the source.
2.2.3. Selecting sensor locations
It is necessary to choose the location of sensors in the protected area, which will ensure safety and will be economically feasible. The hexagonal arrangement of the sensors provides the densest, without gaps, coverage of the protected area. The distances between the sensors form equilateral triangles, with the side that we denote through A. In Figure 2 shows two variants of the hexagonal arrangement of sensors - on the left with a lower frequency, with a distance between sensors А1, on the right with a higher frequency, with a distance А2. The black circle corresponds to the boundary of the gas area, which has risen to the top and spreads along the ceiling.
With a more frequent arrangement of sensors, gas is detected earlier, with a smaller volume of gas emissions. The ceiling area is covered with sensors without gaps, except for areas near the walls of the room. For complete closure, additional sensors can be placed near the walls. At the same time, when the gas rises along the walls, the pressure will more actively displace its molecules into the inner regions of the room, into the zones of action of the sensors. Thus, at the walls and in the corners of the room, the gas reaches the sensors faster than in the centre of the room.
In Figure 3 shows a circle of gas on the ceiling of the room, which is described around a triangle of sensors arranged in a hexagonal pattern. This is an element of the situation shown in Figure 2. The figure shows the most unfavourable situation that occurs when the gas region reaches the ceiling in the centre of the triangle, at the vertices of which the sensors are located.
The position of the gas source under the sensors corresponds to the largest volume of gas accumulated in the room. Therefore, if the gas reaches the level of the sensors at any other point, then the gas leak notification will be received with smaller volumes of gas in the room. The sensors form an equilateral triangle, the side of which is equal to A – the distance between the sensors. The radius of the described circle L, which determines the area of gas propagation along the ceiling, is
The mass mg of a given volume of gas, as shown in (1), with guaranteed registration, at a constant density q will be (which can be considered the maximum, i.e., the upper estimate of the mass of the gas, taking into account diffusion and pressure change)
mgmax= Vgq
In this case, the minimum volume of gas Vmin = Vup for registration occurs when the gas cloud reaches the ceiling height H, (the level of the sensors). Its mass is equal to
mgmin= Vminq= 1/3 πrn2 Hq
When the gas reaches one of the sensors, a message will appear indicating the presence of gas. The message will appear as a signal on the operator’s monitor, which shows the location of all sensors. The localization of the signals will indicate the location of the danger. At the same time, the signals are sent to the automated security system. In this system, the coordinates of the sensors that gave the signals are used to calculate the coordinates of the location of a possible gas source, and measures are taken to prevent the threat or eliminate the fire.
As the distance between sensors decreases, the number of sensors increases, and therefore the cost of the safety system increases. At the same time, the volume of flammable gas that will have time to spread before it is registered is reduced.
Let’s consider the X and Y coordinates of the placement of sensors under the ceiling, and the dependence of the volume of gas on the density of filling by the sensors. Let the room have dimensions Tx on the X axis and Ty on the Y axis; i.e., the area of the room S is equal to
Let’s calculate the coordinates of the sensors at a hexagonal location. The distance between the sensors is A. The sensor is located in the centre of a regular hexagon with side C. Let’s start placing the sensors from the origin located in the lower left corner of the room.
The coordinates of the first sensor D11, located in the first row, are equal to:
The coordinates of the second sensor in the first row D12 are:
The coordinates of the n-th sensor D1n in the first row are:
The first row is filled, and it is necessary to consider the possibility and necessity of filling the remainder to the wall of the room, provided:
The coordinates of the first sensor D12, located in the second row, are:
The coordinates of the n2-th sensor D2n, located in the second row, are:
The second row is filled, and it is necessary to consider the need to fill the space up to the wall of the room, provided:
Having filled the rows of sensors to the right and up, we solve the issues of closing the areas adjacent to the walls with sensors. Practice shows that no special control is required at the borders. Corners and walls direct gas to the central part of the protected room, where the sensors are located.
The sum of the intervals between the sensors in each row, taking into account the initial distance, should not exceed the length of the room.
The number of such rows dy = 2Ty / A, where A/2 is the distance between the rows. Thus, it is possible to obtain an estimate of the total number of sensors d
The considered example demonstrates the application of the developed method of gas sensors location to ensure the fire safety of industrial premises.
3. Results and Discussion
According to the developed method, practical calculations of examples of choosing the location of sensors and determining their number were carried out. The calculations were carried out using a program for working with Microsoft Excel spreadsheets. Consider the choice of the location of the sensors depending on the permissible volume of gas in the protected room. The maximum allowable volume of gas in the room is denoted by Vm.
As shown in Table 1, the volume of the gas cloud when the height of 4 m is reached will be Vm = 67.02 m3. The radius of the base of the cone, with the assumptions made, will be 4 m. This volume can be taken as the maximum permissible value, since at lower limit values, the gas will not yet reach the sensors.
Let the dimensions of the room are 20 meters by 10 meters: Tx = 20 m, Ty = 10 m; the height of the room is H = 3 m.
Under these conditions, according to formulas (16) – (24) and Figure 4, the location of the sensors is determined. This arrangement will provide full coverage of the surface of the room, and provides control of potential gas emissions. If rn = 3 m, then, according to formula (13), A = 5.2 m. Let the sensors be located no further than 4.34 m from each other. Let’s calculate the coordinates of the sensors and their number.
The coordinates of the first sensor D11, located in the first row, are equal to:
The coordinates of the second sensor in the first row D12 are:
The coordinates of the third sensor D13 in the first row are:
Since Tx – x13 = 20 – 17.5 = 2.5, which is less than 3C = 7.5, i.e., the step of placement of sensors, the first row is filled. You can consider the need to fill the remainder to the wall of the room. There are three sensors here.
The coordinates of the first sensor D21, located in the second row, are equal to:
The coordinates of the 2nd sensor D22, located in the second row, are:
Since Tx – x22 = 20 – 13.75 = 6.25, which is less than 3C = 7.5, i.e., the step of placement of sensors, the second row is also filled, and it is necessary to consider the need to fill the remainder to the wall of the room. There are two sensors here.
The coordinates of the sensors in the third row differ only vertically, i.e., along the y-axis. The coordinates of the first sensor D31, located in the third row, are equal to:
The coordinates of the second sensor in the third row D32 are equal to:
The coordinates of the third sensor D33 in the third row are:
Since Tx – x33 = 20 – 17.5 = 2.5, which is less than 3C = 7.5, i.e., the step of placement of sensors, the third row is filled. You can consider the need to fill the remainder to the wall of the room. There are three sensors here.
The coordinates of the sensors in the fourth row differ only along the y-axis. The coordinates of the first sensor D41, located in the fourth row, are equal to:
The coordinates of the 2nd sensor D42, located in the fourth row, are equal to:
Since Tx – x42 = 20 – 13.75 = 6.25, which is less than 3C = 7.5, i.e., the step of placement of sensors, the fourth row is also filled, and it is necessary to consider the need to fill the remainder to the wall of the room. There are two sensors here.
Since Ty – y42 = 10 – 8.68 = 1.32, which is less than A / 2 = 2.17, i.e., the step of placement of sensors along the y-axis, the ceiling surface is filled and the problem is solved.
In principle, it is possible to consider the need to fill with sensors, the rest of the ceiling to the wall of the room.
Having filled the rows of sensors to the right and up, until the boundaries of the room are reached, we solve the issues of closing the areas adjacent to the walls with sensors.
The number of sensors in a room is determined by the size of the room and the distance between the sensors. The number of sensors in two rows of three, in two rows of two, a total of 10 detector sensors are needed.
The arrangement of sensors in four rows on the ceiling of the room is schematically shown in Figure 5. This can be considered as a framework that, if necessary, can be completely moved to give the system greater symmetry.
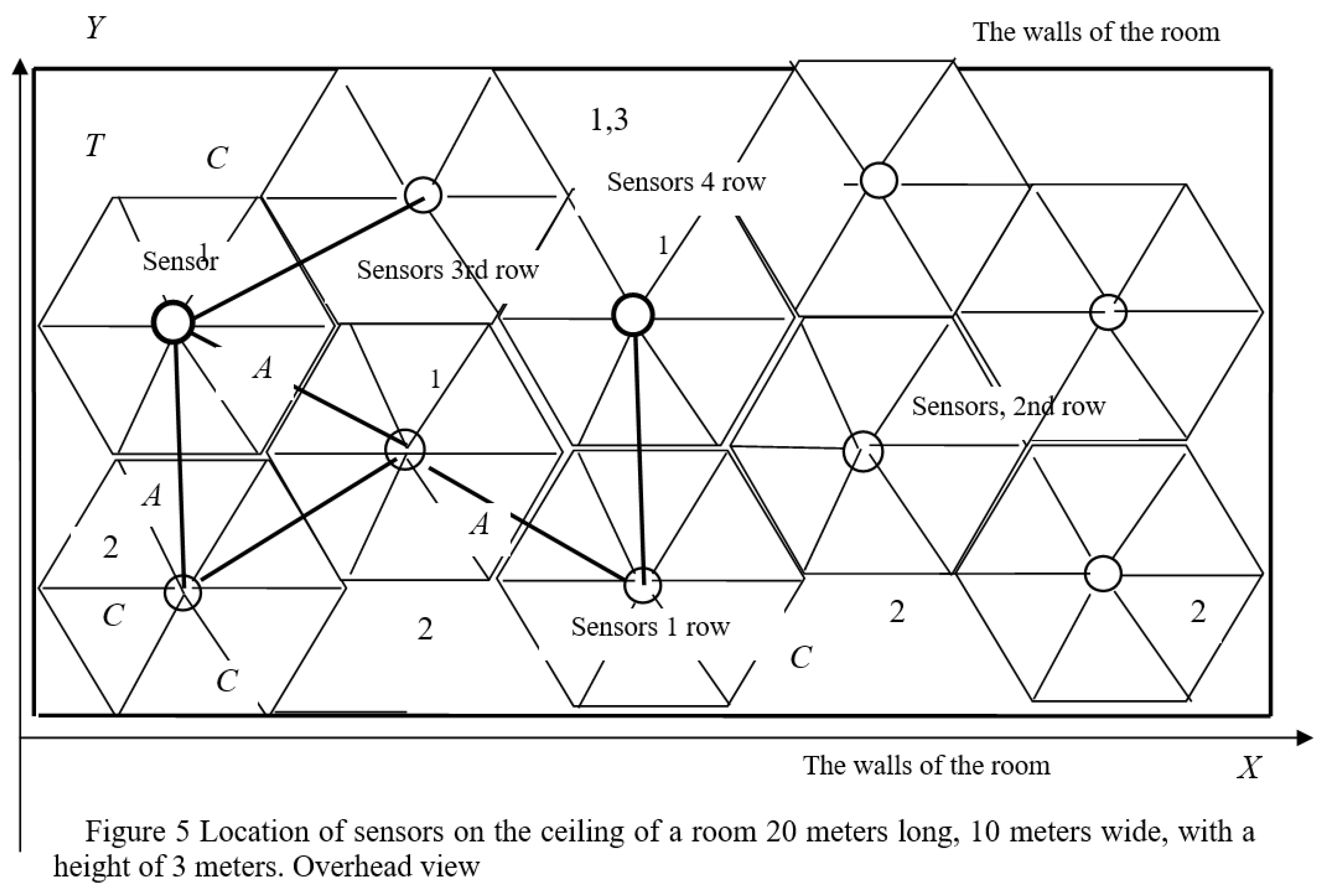
The number of sensors in the room is determined by the size of the room, the permissible volume of hazardous gas, and the sensitivity of the sensors. These parameters determine the distance between the sensors to the greatest extent.
The considered example represents the rational placement of sensors that register the appearance of a dangerous gas. The developed method makes it possible to adjust the placement of sensors depending on the maximum permissible volume of gas and the sensitivity of the sensors used. The method makes it possible to control the layout of sensors depending on the volume of protected premises, types of production, the creation of new sensors, changes in the composition of hazardous gas in different technological processes.
Next, it is necessary to calculate the localization (coordinates of a possible place) of the gas emission according to the coordinates of the sensors that signal the registration of a hazardous substance in the room. This method provides calculation of the coordinates of the gas source from the coordinates of the triggered sensors. Knowing the coordinates of all sensors, the coordinates of the sensors that gave the alarm, and the formula for determining the volume of the gas cloud under these sensors, it is possible to assess the localization of the source of hazardous gas in the protected premises. This increases the efficiency of the fire safety system.
The method provides the calculation of the rational placement of sensors when changing conditions: the height and size of the room, increasing the sensitivity of the sensors, the requirements for the maximum permissible volumes of recorded gases, etc.
4. Conclusions
One of the important problems of maintaining the operation of industrial enterprises is to ensure fire safety. It is important to detect a potential fire before ignition, at the stage of the beginning of deviation from the normal technological process. Indicators of an emergency situation are various gases, an increase in the concentration of which indicates the beginning of a dangerous process. The creation and use of gas sensors makes it possible to detect small changes in the concentrations of hazardous gases. The article presents a mathematical method for choosing the location and number of sensors that solve the problem of gas control. The natural physical approach will change from the standpoint of analyzing the gas flow from the source to the locations of sensors in the premises of enterprises.
The developed mathematical model of the rational location of gas detectors on H2 and CO for early detection of fire (accident) is presented. The model-based method for calculating the location of gas analyzers makes it possible to diagnose and predict fire hazard at technological facilities based on gas control, and compare the obtained values with the maximum permissible values. The calculation of the conditions for the rational placement of gas detectors for different heights of technological premises is carried out.
The method made it possible to determine the rational placement of sensors that ensure timely registration of gas, taking into account economic feasibility. The resulting solution can be algorithmically converted for use in other conditions, when changing the size, height, shape of the room, changing the norms of permissible volumes of hazardous gas. The method provides a change in decisions with the appearance of more sensitive sensors. The method is also applicable for technologies where other types of gases are indicators. It is planned to develop a mathematical program for an automated fire protection control system with an early fire detection function based on H2 and CO gas control in technological design.
Author Contributions
This research was carried out personally by the author
Funding
This research received no external funding.
Acknowledgments
Author declares that this manuscript is original, has not been published before, and is not currently being considered for publication elsewhere.
Conflicts of Interest
Conflicts of Interest: The author declares that there are no known competing financial interests or personal relationships that could affect the work presented in this paper.
References
- Detection of real fires by carbon monoxide detectors - foreign experience. The results of 10 years of research lead to a leap in fire detection technology. Article by David Bywater. TRANSLATION.http://daily.sec.ru/2011/12/28/Obnarushenie-realnih-posharov-detektorami-ugarnogo-gaza--zarubeshniy-opit.html.
- https://ru.wikipedia.org/wiki/Gas detector.
- Bakanov V (2014) Fire detectors with a gas sensor in the light of current regulatory requirements. Protection Technologies 4:71-78.
- EN 50291-1 2010-04 + A1 2012-06 Electrical apparatus for the detection of carbon monoxide in domestic premises – Part 1: Test methods and performance requirements.
- Lukyanchenko AA et al. (2009) Trends in the development of automatic fire detectors. Technologies of Technosphere Safety 23(1). http://ipb.mos.ru/ttb.
- Fire alarm systems and automation of fire protection systems. Designing and regulations rules. СП 484.1311500.2020. https://docs.cntd.ru/document/566249686.
- Siting Gas Detectors. https://www.internationalgasdetectors.com/wp-content/uploads/2016/04/SITING-GAS-DETECTORS-BS023.pdf.
- https://hsseworld.com/wp-content/uploads/2022/01/Gas-Detection-Handbook.pdf.
- https://www.safetygas.com/media/productattach/e/n/en-gas_and_flame_detection_gazdetect_2021.ed01-web.pdf.
- https://evikontroll.ee/pdf/crowcon/Xgard_UM_EN.pdf.
- https://www.gfgsafety.com/fileadmin/templates/img/GfG-Branches/GfG-USA/Application_Notes/AP1027_cleaning_and_sanitizing_portable_gas_detectors_14_MAY_20_lower_res.pdf.
- https://www.canarysense.com/pdfs/resources/brochures/Honeywell-Gas-Detection-Book2.pdf.
- Guidelines for placing sensors on flammable gases. https://www.seitron.ru/assets/docs/dokumenty/razmeshenie%20sensorov.pdf.
- Basic Guidelines for Selection of Fire and Gas Detectors Inst Tools. Fire & Gas System. https://instrumentationtools.com/selection-of-fire-and-gas- detectors.
- Brattery A, Gavelly F, Hansen OR, Scott SG (2011) Using CFD to analyze gas detector location in process facilities. Mary Kay O’Connor Process Safety Center Symposium 2011. At: College Station, Texas, USA, Volume: Intern. Process Safety Symposium 2011.
- Okeke RO, Ehikhamenle M (2017). Design and simulation of gas and fire detector and alarm system with water sprinkle. International Journal of Engineering Research and General Science 5(1). http://oaji.net/articles/2017/786-1488211888.pdf.
- Todd Zhena, Katherine A. Kliseb, Sean Cunninghamc, Edward Marszalc, Carl D. Lairdab. A mathematical programming approach for the optimal placement of flame detectors in petrochemical facilities. Process Safety and Environmental Protectio. Vol. 132, December 2019, p. 47-58. [CrossRef]
- Yücel Güllüce, Rahmi Nurhan Çelik FireAnalyst: An effective system for detecting fire geolocation and fire behavior in forests using mathematical modeling. Turk J Agric For (2020) 44: 127-139 © TÜBİTAK doi:10.3906/tar-1907-11 Vol. 44, numder 2, 2020. https://journals.tubitak.gov.tr/cgi/viewcontent.cgi?article=1117&context=agriculture. [CrossRef]
- K. Gupta, Rajiv Kumar, P. K. Yadav and M. Naveen. Fire safety through mathematical modeling. https://www.researchgate.net/publication/228763095_Fire_safety_through_mathematical_modelling.
- Lukyanchenko, A.A. et al.: Integrated automated system for early fire detection and environmental monitoring “Kassandra”. Nauchn.- Tech. Catalog 52 (2014), 52.
- Yutyaev, A.E., Iakunchikov, E.N., Oganesyan, A.S., Agafonov, V.V. Evaluation of design solutions and technological systems of coal mines taking into account the risk. Ugol, 2019, (7), 52–57. [CrossRef]
- Fedorov AV, Lebedeva MI, Petrov AE (2014) Network model for predicting fire hazardous situations in technological processes of primary oil refining. Scientific Internet Journal Technologies of Technosphere Safety 57(5). http://agps-2006.narod.ru/ttb/2014-5/32-05-14.ttb.pdf.
- Petrov AE (2016) Network models for the design of security systems for oil refining facilities. MGGU, Mining Information and Analytical Bulletin (Scientific and Technical Journal 3:61-76 ISSN: 0236-1493.
- A.E. Petrov, A.V. Fedorov, A.V. Kochegarov, E.N. Lomaev, A.P. Preobrazhenskiy. The Analysis of Network Models for the Design of Industrial and Fire Safety Systems for Oil Refineries. – p. 6. IOP Conf. Series: Earth and Environmental Science 808 (2021) 012024, IOP Publishing. [CrossRef]
- A.E. Petrov. Tensor Method and Dual Networks in Electrical Engineering. ISSN 1068-3712, Russian Electrical Engineering, 2008, Vol. 79, No. 12, pp. 645–654. © Allerton Press, Inc., 2008. ISSN 1068-3712, https://pdfslide.net/documents/tensor-method-and-dual-networks-in-electrical-engineering.html Original Russian Text © A.E. Petrov, 2008, published in Elektrotekhnika, 2008, No. 12, pp. 2–12.
- A.A. Luk’yanchenko, A.E. Petrov, A.V. Fedorov, A.N. Denisov. Method of Rational Location of Gas Sensors For Early Fire Detection Based On Gas Control Technology. Jour of Adv Research in Dynamical & Control Systems, JARDCS, USA, Vol. 12, Issue-06, 2020. Pp. 1293–1306. DOI: 10.5373/JARDCS/V12I2/S20201321. https://jardcs.org/archivesview.php?volume=3&issue=36&page=6.
- Petrov, A., Fedorov, A., Mintsaev, M., Ilyukhin, A., Marsov, V. (2023). Theoretical Foundations and Methods for the Rational Location of Gas Fire Sensors Based on Gas Control Technology. Mathematical Modelling of Gas Fire Sensors Location for Early Fire Detection. In: Beskopylny, A., Shamtsyan, M., Artiukh, V. (eds) XV International Scientific Conference “INTERAGROMASH 2022”. INTERAGROMASH 2022. Lecture Notes in Networks and Systems, vol 574. Springer, Cham. 1658–1667. [CrossRef]
Figure 1.
Gas distribution from a source located on the room floor. The upper base of the gas cloud cone is flat.
Figure 1.
Gas distribution from a source located on the room floor. The upper base of the gas cloud cone is flat.
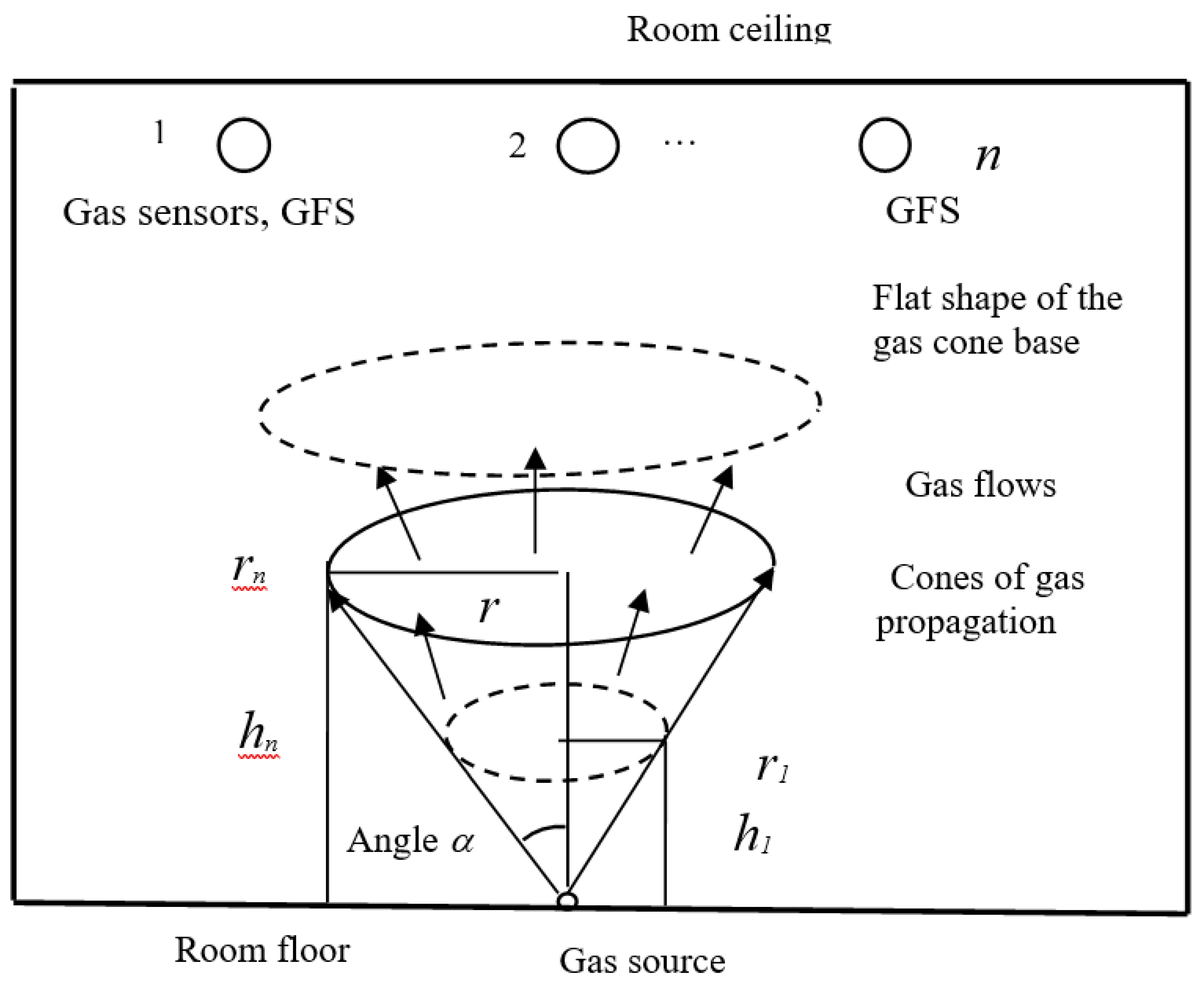
Figure 2.
Views from above. Variants of hexagonal arrangement of sensors with a distance between them А1 and А2. The black circle represents the boundary of the area of gas that has risen to the ceiling.
Figure 2.
Views from above. Variants of hexagonal arrangement of sensors with a distance between them А1 and А2. The black circle represents the boundary of the area of gas that has risen to the ceiling.
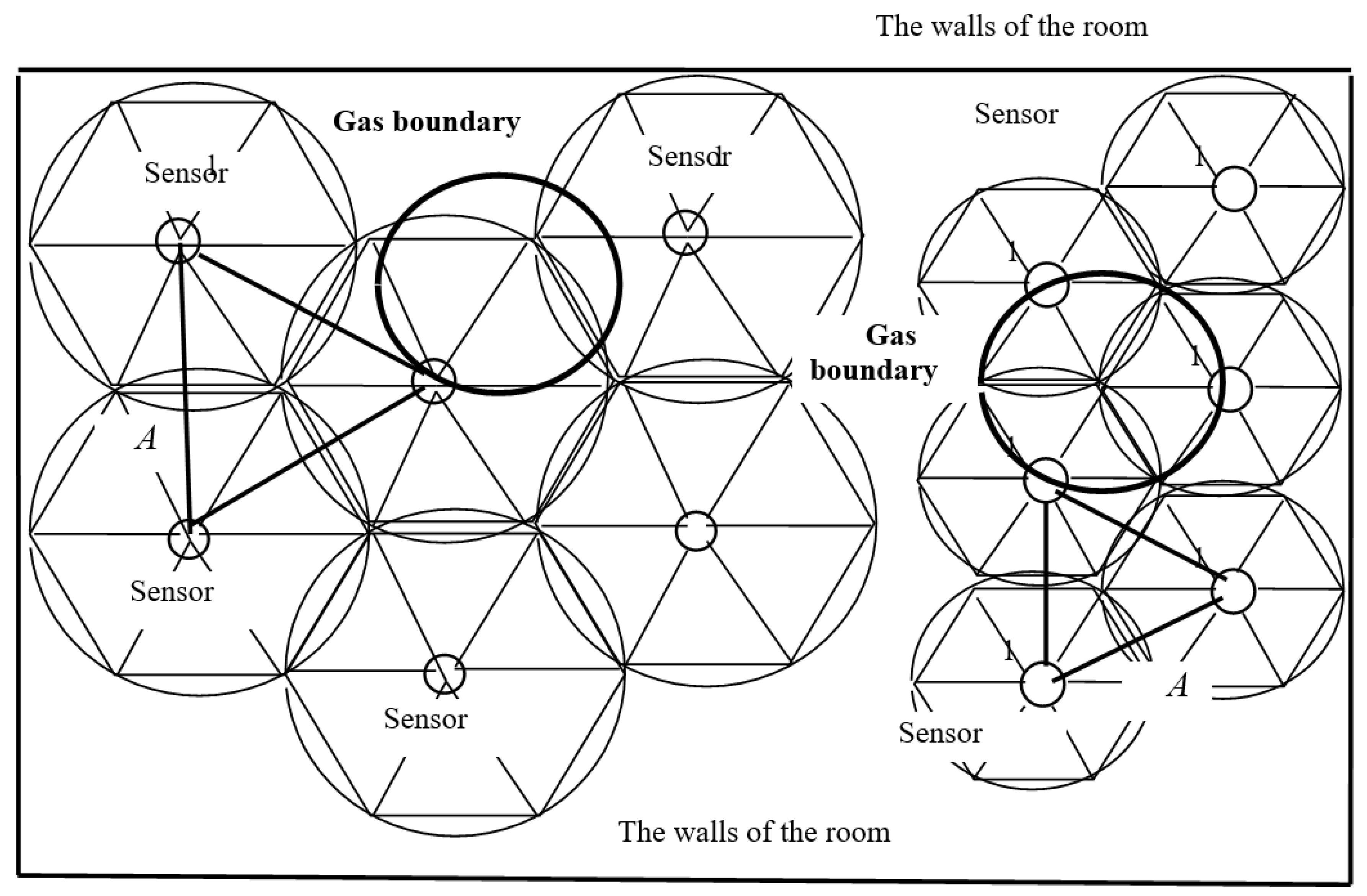
Figure 3.
Gas propagation area touches sensors on the ceiling, top view.
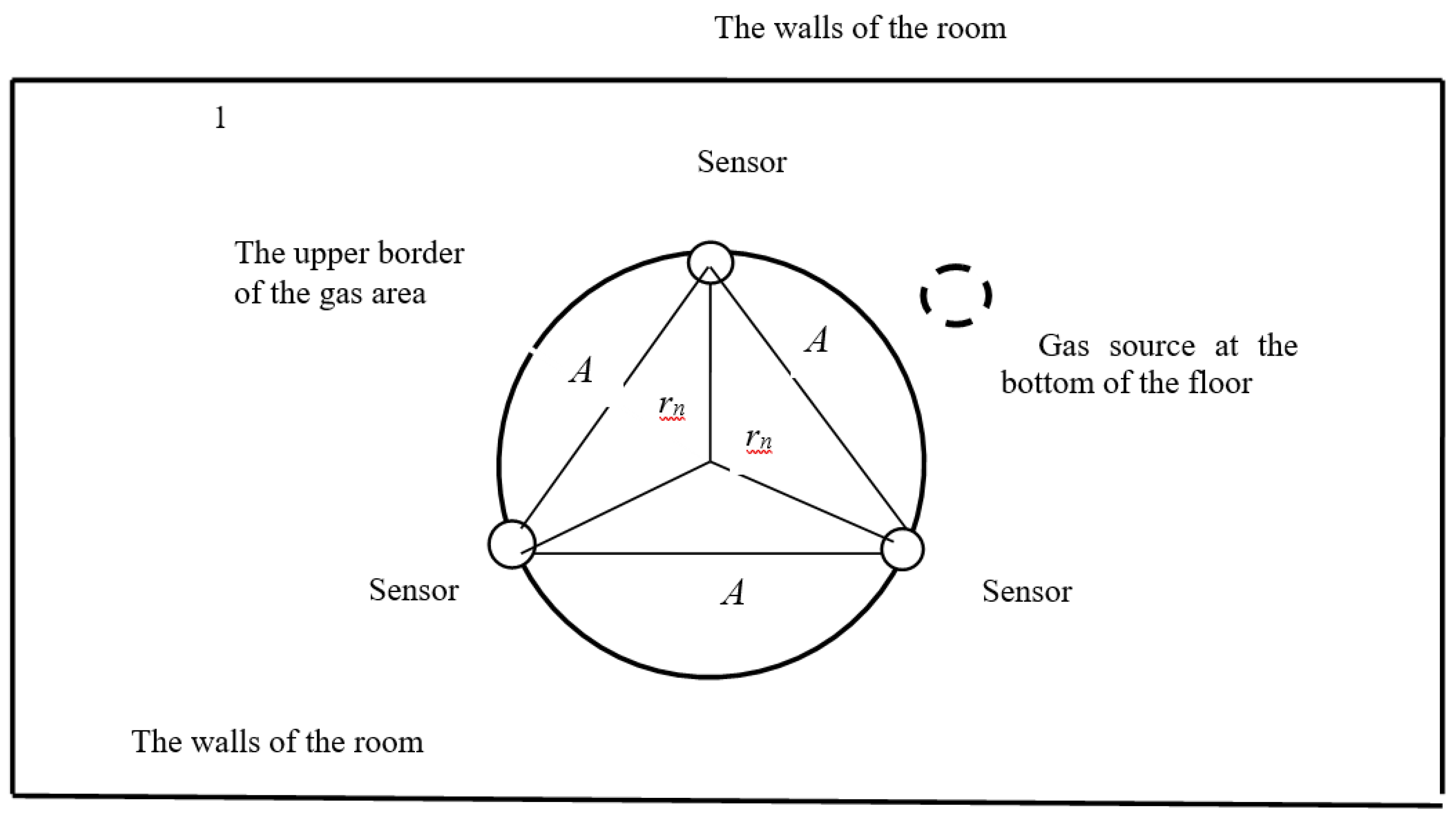
Figure 4.
Hexagonal arrangement of sensors with the distance between them A1 .
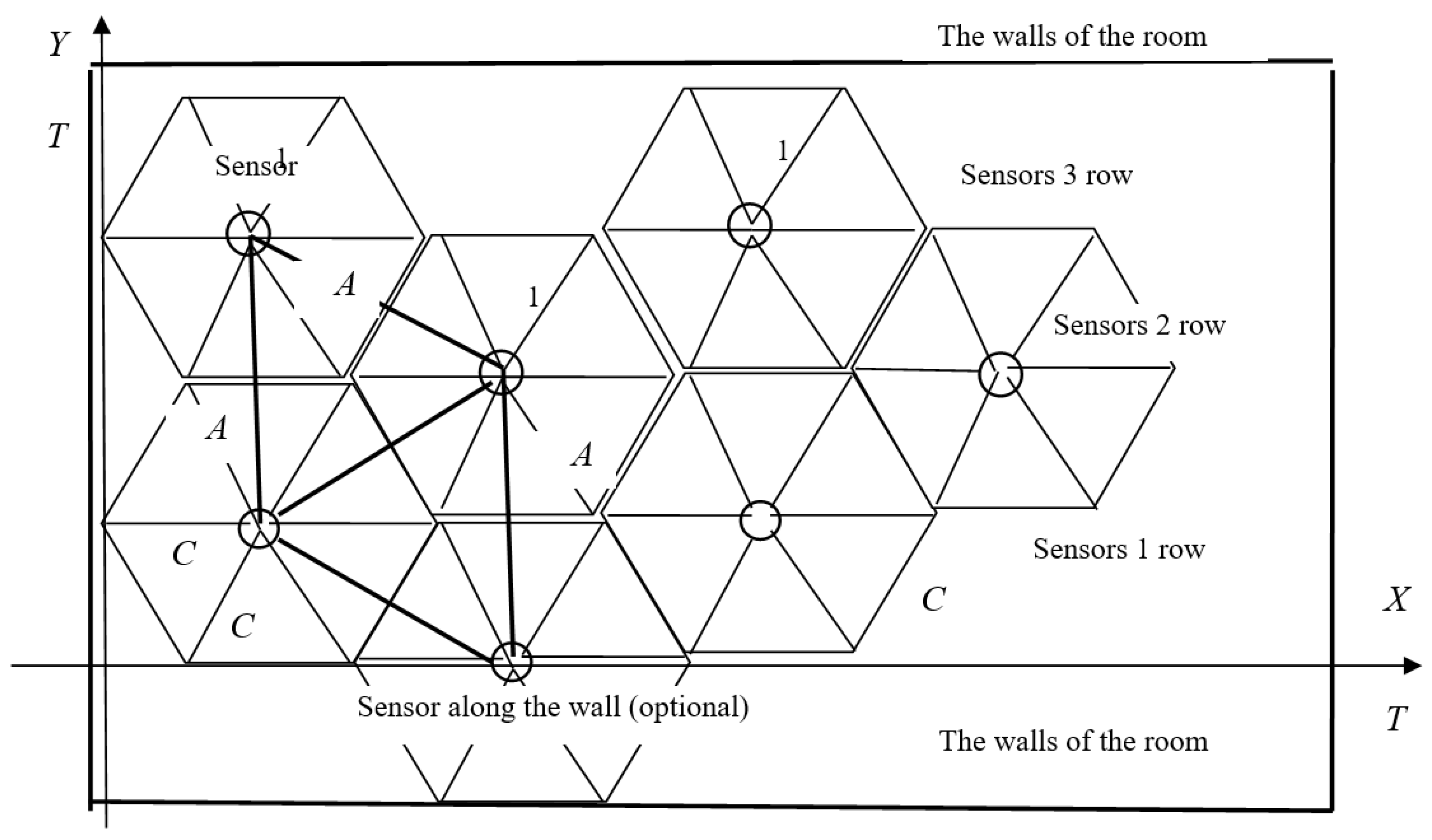

Table 1.
The geometrical characteristics of the gas cloud when rising to the ceiling.
| Time since the beginning of the ejection, sec | The height of the gas cone at each moment | Gas cloud rise rate | Room height | The difference between the heights of the room and the cone | Accumulated volume of gas cone |
|---|---|---|---|---|---|
| t, sec. | r = h, m | v, m/sec | H, m | H - ht | V, m3 |
| 1 | 1,00 | 1,0000 | 4,0 | 3,00 | 1,05 |
| 10 | 2,15 | 0,4445 | 4,0 | 1,85 | 10,47 |
| 20 | 2,71 | 0,2482 | 4,0 | 1,29 | 20,94 |
| 50 | 3,68 | 0,1271 | 4,0 | 0,32 | 52,36 |
| 60 | 3,91 | 0,1119 | 4,0 | 0,09 | 62,83 |
| 64 | 4,00 | 0,0209 | 4,0 | 0,00 | 67,02 |
| 65 | 4,02 | 0,0207 | 4,0 | -0,02 | 68,03 |
Table 2.
The geometrical characteristics when the gas cloud moves along the ceiling to the sensors.
| Time of movement on the ceiling, sec. | The radius of the ring ri, m | The speed of the gas ring | Distance between sensors, A, m | A – ri | Gas cloud volume V+Vup | The length of the walls of the room, L, m | Distance from the gas ring to the walls L – ri |
|---|---|---|---|---|---|---|---|
| 5 | 2,24 | 2,2361 | 6,0 | 3,76 | 72,26 | 15,00 | 12,76 |
| 10 | 3,16 | 0,9262 | 6,0 | 2,84 | 77,49 | 15,00 | 11,84 |
| 20 | 4,47 | 0,5992 | 6,0 | 1,53 | 87,96 | 15,00 | 10,53 |
| 30 | 5,48 | 0,4772 | 6,0 | 0,52 | 98,44 | 15,00 | 9,52 |
| 40 | 6,32 | 0,4085 | 6,0 | -0,32 | 108,91 | 15,00 | 8,68 |
| 50 | 7,07 | 0,3629 | 6,0 | -1,07 | 119,38 | 15,00 | 7,93 |
| 60 | 7,75 | 0,3298 | 6,0 | -1,75 | 129,85 | 15,00 | 7,25 |
| 70 | 8,37 | 0,3043 | 6,0 | -2,37 | 136,14 | 15,00 | 6,63 |
| 80 | 8,94 | 0,2840 | 6,0 | -2,94 | 138,23 | 15,00 | 6,06 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



