
Submitted:
19 September 2023
Posted:
20 September 2023
You are already at the latest version
Abstract
Besides the increase in global energy demand, access to clean energy, reduction in greenhouse gas emissions caused by conventional power generation sources, energy security, and availability of electricity in remote villages in emerging nations are some of the factors that foster the use of renewable energy sources (RESs) in generating electricity. One of the aims of initiating microgrids (MGs) is to maximize the benefits of RES and alleviate the associated grid integration issues. Microgrids are made up of RES connected to electrical loads within clearly delineated electrical limits that operate as individual controllable units on the electrical network. It can operate in-dependently as well as in connection with the grid. The paper presents an overview of microgrids and investigates the system's performance when connected to and disconnected from the grid. Furthermore, in both modes of operation, the functioning and behavior of system components such as the bidirectional DC-DC converter and energy storage system (ESS) were evaluated. The architecture of the proposed microgrid consists of a small hydropower plant, a wind farm, and a battery energy storage system (BESS). The microgrid under investigation is modeled and simu-lated using MATLAB and Simulink.
Keywords:
Keywords: Microgrid
; small hydropower plant
; wind farm
; battery energy storage systems
; grid-connected
; stand-alone mode
; power quality
1. Introduction
Population growth, technological innovation, access to clean energy, and environmental concerns are some of the factors that compelled governments and scholars across the globe to hunt for alternate ways to generate electricity to fulfill the world's continual increase in energy demand. Furthermore, due to considerations such as geographical location, lack of accessibility, and transportation infrastructure restrictions, a considerable proportion of rural and remote areas in Sub-Saharan Africa lack access to a steady power supply [1,2,3]. Some of the conventional tactics deployed by the utility to address these challenges have not yielded positive outcomes. However, with the recent advancement in technology, renewable energy sources (RESs) are one of the possible solutions to these issues. Renewable energy provides cleaner energy and is capable of supplying electricity to rural areas and communities [4]. Integrating RESs into distribution networks offers utilities and electricity consumers different technical, conservational, and financial benefits [5,6,7]. The direction of power flow on the grid has also changed from unidirectional to bi-directional due to the emerging technology of grid integration of RESs. Power distribution operators and consumers are impacted positively and negatively by the change in the flow of power [8, 9]. The concept of renewable energy-based microgrids was developed by researchers and governments to maximize the benefits and alleviate grid integration limitations [10, 11]. According to [4], a microgrid is a power network unit that uses small power-generating sources, such as RESs and other distributed generation sources, connected with energy storage devices to meet the load demand. The microgrid enhances grid integration of renewable energies, reduces transmission and distribution losses, and offers a dependable electricity supply. The general overview of microgrids and performance evaluation of the system when connected to the power grid and off-grid, considering various power issue scenarios, are presented in this paper. The microgrid under investigation consists of wind farms, a small hydroelectric power plant, and energy storage systems. Various case studies, such as fault conditions, system overload, and the transition from one operating system to another, are used to assess the system’s performance. The network under investigation is molded and simulated using MATLAB/Simulink. The paper is structured as follows: Section 2 provides a comprehensive overview of microgrids. Section 3 discusses the network under investigation and simulation scenarios, Section 4 presents simulation results and discussion, while microgrid limitation, conclusion, and future works are presented in sections 5 and 6 respectively.
2. Microgrids Overview
Scholars have assigned several meanings to microgrids. A microgrid is described by the US Department of Energy as a set of unified distributed generation sources (DGs) and loads within definite electrical restrictions that can operate as an independent controlled entity on the electrical grid [5,6,7]. European Union research project defines microgrids as a low-voltage (LV) distribution network consisting of DGs, energy storage units, and variable loads that can operate when coupled or decoupled from the utility grid [15,16]. Furthermore, in [17], a microgrid (MG) is said to be a moderate power network with DGs, mosnitoring circuits, and electrical loads. Generally, the given definitions recognized the significance of distributed energy sources in microgrids and their ability to function as an independent entity on the grid.
2.1. Components and classification of microgrids
Microgrid comprises electricity generation sources, energy storage systems, and electrical loads that are electrically interconnected [16], [18,19]. Figure 1 shows the fundamental structure of a microgrid.
Microgrids (MGs) generate electricity using renewable energy sources like solar, wind, small hydropower plants, and microturbines. Another essential component of MGs is energy storage units. Energy storage systems (ESSs) ensure an uninterrupted and continuous power supply to the loads and contribute to the stability of the microgrid due to the irregular supply from the RESs. Storage systems can enhance the power quality by maintaining the grid's nominal voltage. BESSs are commonly used with microgrids [20, 21]. Different loads, such as AC, DC, linear and non-linear, and dynamic loads, can be integrated into microgrids. Load management systems are vital components in microgrid systems. Microgrid energy loads have a wide range of controllable characteristics, from critical loads to adjustable loads. The use of critical loads, such as hospital loads, cannot be shaded; the use of adjustable loads, like heating or cooling, lighting, and pool filters, can temporarily be shaded for peak load reduction.
Other loads, like business buildings with backup power sources and residential buildings, should be shaded during emergencies to maintain microgrid reliability and avoid power outages [22, 23]. Power conditioning units (PCUs), energy management systems, and control systems are other essential elements of MG. In MG, energy conversion units comprise transformers (step up and step down) and PCUs that convert produced power to the necessary and suitable power and voltage to be provided directly to the grid or end user [24]. Hybrid microgrids require an energy management system (EMS) due to the range of intermittent energy sources involved. The EMS must be able to control all interconnected power generation sources and provide swift responses to situations on the grid [25,26,27].
2.2. Microgrid Classification
Microgrids are classified based on architecture, supervisory control, modes of operation, and phases [28,29]. However, classification based on the microgrid architectures and voltage characteristics is reviewed [30,31,32,33,34,35].
- AC Microgrid
- DC Microgrid
- Hybrid Microgrid
2.2.1. AC Microgrid (ACMG)
This is the most implemented MG. In this category, various forms of renewable energy sources are integrated into the grid using a power electronic converter (PEC) [36]. The AC microgrid offers minimal modifications for integration into the existing grid. It is commonly used in medium- and low-voltage distribution networks to enhance current flow and minimize power loss in transmission lines. In addition, the ability to integrate with traditional distribution networks or operate in stand-alone mode makes the system flexible, allowing it to operate directly with AC distribution devices such as AC loads. It does not require any inverters for AC loads, and the protection system is cost-effective. However, system integration causes stability and power quality issues for distribution operators [33], [37, 38]. Lower conversion efficiency, high DC-AC conversion costs, controllability challenges due to frequency factors, voltage regulation, unbalanced compensation, and poor power supply reliability, which can impede device performance, are some of the challenges of an AC microgrid [39,40,41,42]. However, the use of advanced control technology solves these problems [33, 37, 43].
2.2.2. DC Microgrid (DCMG)
Due to modern advancements in electrical power generation techniques, several power conversion units have been employed for various applications in power systems [24]. Furthermore, DC-based RESs and various forms of ESS technologies provide new opportunities for the development of DC microgrids. Benefits of DC microgrids include limited energy conversion processes and reactive current restrictions [33, 44, 45]. DC/AC PCU is required for connecting a DC microgrid to an existing traditional power distribution network. DC and AC microgrids are very similar in their operating modes. The main difference is that DC microgrids use DC buses for connectivity, while AC buses connect DGs and utility network loads together. The ideal operating voltage for a DC bus is between 350 and 400 Volts. The main DC bus can be separated into other low-voltage buses to meet the low-voltage prerequisites of electronic loads. In contrast, DC-type microgrid high-voltage DC-DC converters increase the connectivity of low-voltage sources like solar modules with a voltage range between 20 to 45 volts by supplying them with high voltage from the DC bus bar. DC-Microgrid offers several advantages to distribution operators over AC-Microgrid. Transmission efficiency due to non-reactive power, supply reliability even in remote locations, relatively small wiring due to high voltage at low temperatures, and convenient system control without causing complications such as synchronization, harmonics, reactive power, and frequency regulation are some of the advantages of DC microgrids [46,47,48]. However, some disadvantages include inconsistent AC load proportional to the number of AC loads and large voltage drop in the absence of a reactive power source, especially for large systems [38], [49,50,51,52,53].
2.2.3. Hybrid Microgrids (HMGs)
HMGs are achieved by integrating ACMG and DCMG on the same distribution network. In HMG, AC, and DC elements are separately integrated into their respective sections, therefore grid harmonization is not required for the energy generation and storage components. Since AC and DC elements are separately integrated into their respective sections in HMG, grid harmonization is not required for the energy generation and storage segment [54,55,56]. Combining the advantages of ACMG and DCMG, HMG enhances the network’s reliability and efficiency and enables easy integration of different RESs and ESSs into the existing distribution network [28, 57, 58]. HMG reduces the number of energy conversion processes and thus reduces power loss [59, 60]. However, the high cost of complex storage and control systems poses challenges for the microgrid. Furthermore, MGs may be grouped according to their usage into utility, institutional, commercial, industrial, and transport microgrids [11, 61].
2.3. Microgrid Mode of Operations
2.3.1. Grid-Connected Modes
The microgrid is connected to the grid through a common point coupling (PCC). Depending on the amount of power generated and customers’ demand, excess power generated can be shared with the utility grid through PCC [18, 65]. Distribution network feeders must be adequately equipped for this purpose.
2.3.2. Stand-alone Mode of operation
This is a situation where MGs operate autonomously with connected loads when detached from the main utility power network. Microgrids can be intentionally or unintentionally disengaged from the utility network to operate independently. In this condition, MG supplies electricity to the connected loads through the micro-sources. The intentional disconnection of microgrids is predefined and follows a predefined process, while unintentional islanding can be a result of unwanted situations such as faults on the grid. During this time, the microgrid can automatically switch from grid-tied to stand-alone mode through a protective device. In autonomous operation, differences in the generated power and load demand cause voltage and frequency fluctuations in the network. In renewable energy-based MG, the output power of each micro-source must be effectively coordinated to enhance the stability of the system. Microgrids must be adequately equipped with monitoring systems for a smooth transition from stand-alone to grid-connection mode to obtain voltage-frequency information on the utility grid [42, 66 -68]. Maintaining constant voltage-frequency amplitude and sustaining power balance in MG are the main challenges of islanding mode in microgrids.
2.4. Technical Benefits and Challenges of Microgrids
This section discusses the general overview of the technical benefits and challenges of microgrids.
2.4.1. MGs Technical Benefits
2.4.2. Technical challenges of microgrids
- Microgrid stability
Microgrids in grid-tide mode affect the microgrid's stability due to power-sharing support for the network's instantaneous balance. Renewable energy-based MG in stand-alone with flexible loads causes grid instability. The microgrid transition from grid-connected to stand-alone leads to power imbalance and voltage variation. A stand-alone microgrid requires a reliable energy management system with storage, efficient control systems, and management to maintain stable operation. The ability to compensate for reactive power and fault voltage ride-through capability is required in stand-alone mode to ensure voltage stability [2, 75, 76].
- Microgrid control
MG depends on energy storage devices to maintain an efficient energy balance between generating sources and connected loads. An accurate charge and discharge control system is essential for the microgrid to operate efficiently. The choice of microgrid management systems such as centralized control, distributed control, decentralized control, or coordinated control are challenges facing microgrid systems [25], [77,78,79]. A synchronized control system is pivotal for the microgrid's security and unfaltering working. The control frameworks can be centralized or decentralized and may be actualized with or without a communication interface [33, [80, 81].
- Harmonics
The major cause of harmonics in a microgrid system is the high-power conditioning units (PCUs) involved in the conversion system of renewable energy-based microgrids. It can have various effects on the system's reliability and stability and pose a threat to the effectiveness and safety of the ESSs [82, 83]. Different filtering systems are used to reduce the impacts of harmonics on the grid [84]. In DC microgrids, the heat created by capacitor charging and discharging worsens harmonics. Therefore, the effectiveness of ESS is jeopardized because of its sensitivity to harmonics. Microgrid optimization in autonomous and grid-tide scenarios is critical for system reliability [85].
- Microgrid protection issues
Advanced protection techniques are required for the electrical grid and MG's power-sharing to function properly. Additionally, the MG protection system must respond quickly to isolate the system to safeguard the grid components during a power failure and guarantee continuous power delivery to the loads [38], [86-88].
- Power quality
Power quality is one of the elements to be managed in a grid-tied microgrid. The measurement, investigation, and enhancement of the bus voltage to maintain a sine waveform at the rated voltage and frequency constitute power quality [2]. The significant increase in the use of power electronics-based switching devices and the presence of nonlinear loads on the grid cause power quality problems in distribution networks. Furthermore, the variation in some RESs impacted the quality of microgrid power. In both islanding and grid-connected modes, unconventional control approaches are used to counteract the negative impacts of intermittent renewable energy-based microgrids [89, 90].
3. System under investigation
MATLAB/Simulink software was used to simulate the utility grid and microgrid that make up the system under study. The MG is coupled to the utility grid at a low-voltage distribution network (0.415 kV) via PCC. The microgrid will be operated in both grid-connected and stand-alone modes to allow for effective system performance analysis. The utility grid and microgrid system operate at 50 Hz. The complete one-line diagram of the proposed and simulated network for the investigation is shown in Figure 10.
3.1. Utility Grid
The utility grid consists of a utility substation, 6 buses, and 5 loads. The utility substation is a step-down transformer with a capacity rating of 1MVA, 11/0.415 kV. In addition, the system comprises a backup power storage at the point of PCC which supports the grid and microgrid during power shortages and disturbances on the grid. The storage at PCC is referred to as utility storage in this paper. The loads are scattered across the 5 buses on the network. The total active power on the utility grid is 185 kW, while the reactive power is 151 KVar. Figure 2 depicts the utility grid under investigation's one-line diagram, and Table 2 lists the grid's loads and line parameters.
3.2. Microgrid under study
Figure 3 shows a one-line design of the microgrid architecture under investigation, while Figure 10 illustrates how the MG under study is connected to the electric distribution grid using a circuit breaker at PCC. The circuit breaker regulates all system functions, including the switching of the MG from on-grid to self-operating modes. The microgrid comprises a wind farm, small hydropower plants, and an energy storage system (ESS) interconnected to electrical loads. In this paper, it is presumed that each load represents different streets in the community.
4. Microgrid Components Modelling and Control
4.1. Wind energy conversion system modeling and Wind farm Layout
A wind turbine (WT), a doubly fed inductor generator (DFIG), rotor-side converters, and grid-side converters constitute the wind energy conversion system. While the rotor windings are linked to the prime mover via back-to-back converters, the stator windings are attached to the grid directly. The converter at the rotor side regulates the power (active and reactive) at the grid output; the DC link and grid voltages are controlled by the network-side converter. Wind power is transformed from mechanical power to electrical energy, which is then connected to the utility system. The wind farm is made up of six similar wind turbines (WTs) integrated into a distribution network via 0.415 kV. To reduce mechanical stress on the turbine during gusts, the wind speed must be regulated; DFIG extricates maximum power at a reduced wind speed [38], [91,92,93]. Figure 4 shows the one-line schematic diagram of the wind power conversion system, while Figure 5 depicts the association between turbine output and speed.
The interaction of the rotor and wind velocity determines the extricated power of the wind turbine. The power generated from the wind turbine is given in Equation 1.
where is the generated power by the wind, the air density is , the turbine blade radius is , wind speed is , is the wind turbine power coefficient. The tip-speed ratio is given in Equation (2) [94, 95]:
is the angular velocity, and the air velocity on the rotor is . Using equations (1) and (2), the wind turbine's maximum output power is specified in Equation (3):
where and is given in Equation (4) and (5):
A wind farm is an assembly of installed WT that generates electricity within a certain geographic location. Its size varies from a few turbines to hundreds of turbines distributed across a wide area. Wind farms can be onshore or offshore; however, this study focuses on onshore wind farms. The wind farm under investigation consists of four equal wind turbines with power ratings of 1.5 MW each, adding up to 6 MW; coupled to a low-voltage distribution network. Figure 6 depicts a one-line representation of the wind farm architecture, while Table 3 summarizes the wind turbine and wind farm parameters.
4.2. Small hydropower plant
The small hydroelectric power plant is considered as a source of renewable energy because it requires a significantly small amount of water to operate and its harmful impacts on the environment are minimal compared to large hydropower plants [96, 97]. Small hydroelectricity, in most cases, does not require dams or water storage. It is a cost-effective source of energy to consider for developing countries [96, 98]. The main electrical and mechanical components of a small hydroelectric plant are the water turbine and the generator(s) [99, 100]. Synchronous and asynchronous generators are two types of generators commonly used in technology. Synchronous generators can work independently, while asynchronous generators work together with other generators. Synchronous generators are used in small, stand-alone hydroelectric applications. A hydraulic turbine consists of a pressure hose, tunnel, servo motor, turbine, and pressure reducer. Figure 7 depicts a modest hydropower system with a permanent magnet synchronous generator (PMSG) and a power conditioning unit [101].
The small hydropower plant regulatory system is shown in Figure 8. The main components are a hydraulic turbine, PMSG, and a back-to-back converter with pulse width modulation (PWM). The control system is grouped into motor and grid sides. Voltage-current dual closed-loop control systems are used to control the grid side. The direct current voltage of the back-to-back converter is regulated by a voltage loop system, while both active and reactive powers are coordinated by the current loop. The voltage controller determines the value of the active component for the current) based on the discrepancy between the real voltage () and reference () voltages. The power factor specification is used to adjust the reference value of the reactive current. Similarly, the difference between the reference current value and the actual value is used by the current controller, and the voltage reference value is required with the feedforward compensation. The converter switches are driven by a pulse signal generated by the Space Vector Pulse Width Modulation (SVPWM), allowing the converter output current to follow the DC bus power variation in real time, thus enhancing the management of energy production associated with the network [102]. On the generator side, a double closed-loop speed and current control approach are used, taking the velocity of the hydraulic turbine as the controller. The control algorithm that tracks the output power of the hydro-turbine is determined by the target speed of the generator. The difference between the desired and real speed (n*) is fed into the speed’s supervisory system, and the output is the reference value of the torque current component). The reference value of the excitation current component is set to 0. The variation in the reference values,) and the actual value (,) is transmitted to the current regulator, thus the voltage reference value,) and the feedforward correction is acquired. To synchronize the output current and power variation in real-time and enable energy conversion and transmission, the SVPWM generates a signal that energizes the converter. The pulse modulation of the motor and grid-side converters using the SVPWM algorithm increases the DC voltage usage rate, reduces losses, and increases the effectiveness of the system [102, 103].
In the synchronous rotation coordinate system, the equation for the voltage on the grid-side converter component is given as:
The output voltage vectors (,) are ,,, the current vectors () are given as , and the grid voltage vector components of the dq-axis of the converter are and. The grid-side inductance and resistance are and , is the angular frequency. To increase the efficacy of the control system, the internal current loop of the grid-side converter implements PI with feedforward decoupling control method in the on-grid [104]. The reference values , and of grid-connected voltage are produced by inserting the feedforward components of current ,, and to compensate , and from equation 6, we have equation 7.
where and are the proportional integral (PI), and integral gain respectively. The grid voltage vector is expected to correlate with the d-axis of the dq coordinate to accomplish active-reactive power separation in a grid-connected regulator. The dq-axis components thus fulfill, and respectively. The active power and reactive power are:
The grid receives active power when P is positive, and inductive reactive power when Q is positive.
4.3. Electrical energy storage and Bi-directional converter
Batteries, supercapacitors, compressed air, superconducting magnetic, and flywheels are all forms of energy storage. However, battery energy storage systems (BESS) are used for the investigation in this paper. The storage systems are coupled to the grids using a bidirectional DC-DC converter. The configuration ensures the charging and discharging of the ESSs. The structure of the bidirectional system with the control is shown in Figure 9. The converter's ability to operate in both directions is provided by switches S1 and S2, which are triggered by additional signals from the controller. The operation of switch S1 is for charging when it brings on the right side down to , while the operation of switch S2 is for discharging, which operates during boost mode [105,106].
From the above Figure, the inductor and capacitor are given in equations 10:
where is the DC-link voltage, is the battery nominal voltage, inductance ripple current is , and is the switching frequency. Buck and boost converters duty ratio are given in equations 11 and 12 respectively.
The PI control block is cascaded with the battery current loop to provide the duty ratio. Switch S1 and S2 are operated by the PWM, which receives the duty ratio. The duty ratio is defined in Equation 13:
The battery reference current is given as , is the active power reference. The PI controller proportional and integral gains are and . The battery state of charge (SOC) is given in Equation 14 [107, 108].
The battery capacity is and is the battery current. The battery charging and discharging depend on the generated power and the energy restriction which are controlled by the SOC limit [107,108]. The charge and discharge equation are in Equation 15:
where is out the power of the battery time, is the maximum charge or discharge rate, total power at time
t is , is the time interval, stored energy, and are the minimum and maximum stored energy.
4.4. Voltage Constraints
The designed system must work synchronously with the existing grid and maintain standard voltage limits. The integration RESs must be complied with the IEEE standards [109]. Equation 18 defines the allowable voltage fluctuation range for the designed system.
where is the voltage at buses, is the lowest voltage threshold, and is the maximum allowable voltage. In this paper, the minimum and maximum voltage were set to 0.88pu and 1.1pu. Figure 10 depicts the full one-line diagram of the system under investigation.
5. Simulation results discussion
The paper aimed to assess the performance of the designed systems under various operating conditions. Some of the simulated instances for performance evaluation include stand-alone mode, grid-connected mode, and transition from one mode of operation to another. In each case, normal operation, fault occurrences, increase in power generation, increase in loading system, and sudden de-energized of RESs are some of the simulated and evaluated in each instance.
5.1. Stand-alone mode of operation
In this scenario, the utility grid is intentionally decoupled from the microgrid so that both networks supply power to the connected loads independently. In this mode, two cases were simulated and analyzed.
- Case1: Simulation of Normal operation
The system parameters were simulated without considering any disturbances on the utility and microgrid. The storage systems were set to charging modes. The simulation results are shown in Figure 11 (a)–(c).
Figure 11 (a) shows the voltage, current, and power (active and reactive) measured at the PCC; Figure11 (b) shows the voltage and current measured at some selected buses from the main grid and MG, and Figure11 (c) shows the utility grid and community (microgrid) battery energy storage characteristics. As indicated in Section 4.4, the designed system must be operating within the acceptable minimal and maximal voltage ranges of 0.88 pu and 1.1 pu respectively. From Figure 11 (a) and (b), the systems complied with the maximum and minimum voltage ranges because there were no disturbances, such as faults or changes in the loading system, on the grids.
- Case 2: Simulation of fault scenarios.
In this case, the system is subjected to a three-phase fault at line 4 between bus 3 and bus 4 on the utility grid side. Figure 12 (a–b) shows the response of the system at PCC and the selected buses on the utility grid and microgrid during the fault. According to the waveforms in Figure 12 (a-b), the fault affected only the utility grid for a period of 0.08 to 1.12 seconds and did not influence the microgrid side, as indicated in Figure (b) microgrid voltage and current.
5.2. Grid-connected mode
The system's grid-integrated simulation results are presented in this section. The case studies include faults, transitions from autonomous mode to grid-connected, increases in total generation on the microgrid, sudden disconnection of a micro-source, and changes in the loading system of the microgrid.
- Case 1 Fault occurrence on the grid
The system is exposed to a three-phase fault between Bus 5 and Bus 6 on the utility grid. Figure 13 (a–b) shows the performance of the system during the fault. The voltage, current, and power waveforms at PCC are shown in Figure 13 (a), while Figure 13 (b) shows the voltage and current waveforms on the utility and microgrid. The fault is set to occur within 0.08 seconds and 0.12 seconds on the system, and it was observed that the fault effect spread all over the utility grid and microgrid, as shown in Figure 13 (b).
Case 2: Transition from stand-alone to grid connected.
This section evaluates the grid performance during the transition from grid-connected to standalone. Figure 14 (a-c) shows the voltage-current waveforms from the utility grid, while Figure 14 (a-b) shows the microgrid performance during the transition mode of operation.
To ensure a smooth transition and ensure grid stability, storage systems were activated to support the grid. As can be observed in Figure 14(b), after a few seconds of transition, the utility grid storage system was engaged to deliver extra power to the MG. The upward movement of the SOC indicates the charging mode of the battery, while the downward movement indicates that the battery was discharging, delivering extra supply to the system. To avoid overvoltage on the microgrid side, the utility battery was switched to charging mode, as shown in Figure 14 (d). Figure 14(a) shows voltage, current, and powers at PCC during the transition from grid-connected to stand-alone mode of operation. At t = 0.08s, the shift from grid-connected to stand-alone mode was activated during this period, and there were occurrences of ripple on the entire system voltage before the system became stable again.
- Case 3: Increase in microgridgeneration.
In this case, the small hydropower plant source increases its power generation by 0.9 MW at 0.12 s for almost half a second, after which the storage systems are activated to provide support to the grid. Figure 15 (a–d) shows the system performance during an increase in microgeneration sources.
For a period of 0.1 s, the microgrid experienced overvoltage before the storage system was activated, as seen in Figure 15 (c). Figure 15(a) is the PCC voltage, current, and power during an increase in microgrid generation. Figure 15(a) depicts the PCC voltage, current, and power experience during the activation of the storage system for storing the excess power. The active and reactive power increased before the system storage was activated, and the microgrid system also switched to grid-connected mode. To ensure system stability during the increase in power generation, energy storage system switches were energized to charging mode to store the excess power generated, as shown in Figure 15 (b and d).
- Case 4: Change in system loading
The scenarios of increases and decreases in microgrid system loading are discussed and analyzed in this section. Figure 16(a-b) shows the performance of the system during an increase in the microgrid loading system, while Figure 17(a-d) shows the operation of the system during a reduction in system loading.
Figure 16(a) shows the voltage, current, and powers at PCC from 0s to 0.08s, while Figure 16(b) shows the utility grid and microgrid voltage and current. During an increase in microgrid system load, there is a reduction in microgrid voltage and current during the increase in load from 0s to 0.8s; on the contrary, the utility grid maintains its normal voltage and current level during the period of 0s to 0.08s. At 0.08 s, energy storage systems were activated to discharge mode to provide support to the microgrid; during this period, the microgrid system adjusted itself back to normal voltage and current, as can be seen in Figure 16(b), nevertheless, the microgrid voltage experienced a little ripple. However, the utility grid suffers a reduction in voltage and current due to the transition from stand-alone mode to grid-connected mode; however, the voltage and current still operate within the acceptable range of 0.85 pu to 1.0 pu. Figure 17(a-b) shows the performance of the system during a reduction in the microgrid loading system.
As stated in Section 3.1, each load in the microgrid system represents a street in a community; thus, it is assumed that one street is suddenly out of service in the community supplied by the microgrid system. The response of the system to this situation is presented in this section. Figure 17 (b) shows that the microgrid maintain normal and acceptable voltage and current limit until 0.09 s when a street in the community was suddenly out of service for a period of 0.14 s when the storage systems were activated to ensure stability on the grid. However, the microgrid experienced overvoltage during the period when the street was out of service, as seen in Figure (b). As soon as the utility grid was activated and connected to the microgrid and energy storage systems were activated to charging mode to store the excess power, the microgrid system voltage and current were restored to their normal operation, as seen in Figure 8(b), from 0.14s to 0.2s.
- Case 4: Sudden de-energized of a micro-source
In this case, the small hydropower plant was suddenly out of service. Figure 18 (a–b) shows the system's response to the situation. Figure 18(a) shows single-phase voltage and current at the PCC. As can be seen, the system experiences a voltage and current reduction for a period of 0.1s when the micro-source is deactivated. Furthermore, Figure 18(b) shows the voltage and current, of the utility grid, the system experiences voltage and current reduction from the period of the micro-source deactivation. Also, the microgrid experiences voltage sag during the period of deactivation (0.08s to 0.1s). However, the microgrid was unable to restore to its normal operating condition even though the storage systems were active in charging mode, as shown in Figure 18(b).
- 1.
- Overview of microgrid limitation
The inconsistency of power supply from diverse RESs, like solar and wind, poses a restriction to renewable energy-based MGs. It is also challenging to resynchronize and coordinate the microgrid with the utility grid when the fault on the grid has been cleared. Another limitation to the utilization of microgrids is the implementation of an effective protection mechanism. Furthermore, power quality issues are another limitation of microgrids [110].
Conclusion and Future Works
This paper presents a comprehensive review of MGs and evaluates the system performance when integrated into the low-voltage distribution network, considering different operating scenarios. The paper evaluates the system performance both in grid-connected and island modes of operation. Normal operation, fault analysis, an increase in the generating capacity of microgrids, an increase in system loading, and a sudden loss of energy sources from microgrids are some of the simulated and evaluated cases considered in the paper. In addition, the transition from grid-connected to stand-alone mode, as well as re-synchronization with the main grid, were validated. Finally, the limitations of microgrid implementation were reviewed. Power quality issues and grid synchronization and protection during the transition from the grid-connected mode to stand-alone modes are some of the challenges identified during the performance evaluation carried out in this paper. It was observed that the effects of the fault escalated throughout the system during fault analysis on either side of the system during grid-connected mode. Therefore, microgrid stability, prevention of power quality issues, and effective energy storage systems for grid stability at low-voltage distribution networks are some of the proposed topics for future work.
References
- P. D. (2022). W. P. P. 2022: S. of R. United Nations Department of Economic and Social Affairs, World Population Prospects 2022, no. 9. 2022. [Online]. Available: www.un.org/development/ desa/PD/.
- M. H. Saeed, W. Fangzong, B. A. Kalwar, and S. Iqbal, “A Review on Microgrids’ Challenges Perspectives,” IEEE Access, vol. 9, pp. 166502–166517, 2021. [CrossRef]
- M. K. Deshmukh and S. S. Deshmukh, “Modeling of hybrid renewable energy systems,” Renew. Sustain. Energy Rev., vol. 12, no. 1, pp. 235–249, 2008. [CrossRef]
- F. Canziani, R. Vargas, and J. A. Gastelo-Roque, “Hybrid Photovoltaic-Wind Microgrid With Battery Storage for Rural Electrification: A Case Study in Perú,” Front. Energy Res., vol. 8, no. February, pp. 1–11, 2021. [CrossRef]
- M. A. Mahmud, M. J. Hossain, and H. R. Pota, “Voltage variation on distribution networks with distributed generation: Worst case scenario,” IEEE Syst. J., vol. 8, no. 4, pp. 1096–1103, 2014. [CrossRef]
- P. Chiradeja and R. Ramakumar, “An approach to quantify the technical benefits of distributed generation,” IEEE Trans. Energy Convers., vol. 19, no. 4, pp. 764–773, 2004. [CrossRef]
- H. A. Gil and G. Joos, “Models for quantifying the economic benefits of distributed generation,” IEEE Trans. Power Syst., vol. 23, no. 2, pp. 327–335, 2008. [CrossRef]
- C. Abbey, F. Katiraei, C. Brothers, L. Dignard-Bailey, and G. Joos, “Integration of distributed generation and wind energy in Canada,” 2006 IEEE Power Eng. Soc. Gen. Meet. PES, p. 7 pp., 2006. [CrossRef]
- F. Katiraei, C. Abbey, and R. Bahry, “Analysis of voltage regulation problem for a 25-kV distribution network with distributed generation,” 2006 IEEE Power Eng. Soc. Gen. Meet. PES, p. 8 pp., 2006. [CrossRef]
- G. K. Suman, J. M. Guerrero, and O. P. Roy, “Robust Frequency Control in Interconnected Microgrids: An H2/H∞ Control Approach,” IEEE Syst. J., vol. 16, no. 2, pp. 2044–2055, 2022. [CrossRef]
- A. Hirsch, Y. Parag, and J. Guerrero, “Microgrids: A review of technologies, key drivers, and outstanding issues,” Renew. Sustain. Energy Rev., vol. 90, no. March, pp. 402–411, 2018. [CrossRef]
- D. T. Ton and M. A. Smith, “The U.S. Department of Energy’s Microgrid Initiative,” Electr. J., vol. 25, no. 8, pp. 84–94, 2012. [CrossRef]
- S. Parhizi, H. Lotfi, A. Khodaei, and S. Bahramirad, “State of the art in research on microgrids: A review,” IEEE Access, vol. 3, pp. 890–925, 2015. [CrossRef]
- F. Nejabatkhah, Y. W. Li, and H. Tian, “Power Quality Control of Smart Hybrid AC / DC Microgrids : An Overview,” IEEE Access, vol. 7, no. April, pp. 52295–52318, 2019. [CrossRef]
- C. Schwaegerl and L. Tao, Quantification of technical, economic, environmental and social benefits of microgrid operation. 2013. [CrossRef]
- N. Hatziargyriou, H. Asano, R. Iravani, and C. Marnay, “An Overview of Ongoing Research, Development, and Demonstration Projects 78,” no. August, 2007.
- A. Mohammed, S. S. Refaat, S. Bayhan, and H. Abu-Rub, “AC Microgrid Control and Management Strategies: Evaluation and Review,” IEEE Power Electron. Mag., vol. 6, no. 2, pp. 18–31, 2019. [CrossRef]
- J. A. Peças Lopes et al., “Control strategies for MicroGrids emergency operation,” 2005 Int. Conf. Futur. Power Syst., vol. 2005, pp. 1–6, 2005. [CrossRef]
- H. Abdi and M. Shahbazitabar, “Smart city: A review on concepts, definitions, standards, experiments, and challenges,” Res. Artic. J. Energy Manag. Technol., vol. 4, no. 3, p. 1, 2020, [Online]. Available:. [CrossRef]
- M. Abbasi, E. M. Abbasi, E. Abbasi, L. Li, R. P. Aguilera, D. Lu, and F. Wang, “Review on the Microgrid Concept, Structures, Components, Communication Systems, and Control Methods,” Energies, vol. 16, no. 1, 2023. [CrossRef]
- K. Baker, G. K. Baker, G. Hug, and X. Li, “Optimal integration of intermittent energy sources using distributed multi-step optimization,” IEEE Power Energy Soc. Gen. Meet., pp. 1–8, 2012. [CrossRef]
- B. Moran, “Microgrid load management and control strategies,” Proc. IEEE Power Eng. Soc. Transm. Distrib. Conf., vol. 2016-July, pp. 1–4, 2016. [CrossRef]
- N. T. Mbungu et al., “Economic optimal load management control of microgrid system using energy storage system,” J. Energy Storage, vol. 46, no. December 2021, p. 103843, 2022. [CrossRef]
- J. M. Guerrero, M. J. M. Guerrero, M. Chandorkar, T. L. Lee, and P. C. Loh, “Advanced control architectures for intelligent microgrids-part i: Decentralized and hierarchical control,” IEEE Trans. Ind. Electron., vol. 60, no. 4, pp. 1254–1262, 2013. [CrossRef]
- M. F. Zia, E. Elbouchikhi, and M. Benbouzid, “Microgrids energy management systems: A critical review on methods, solutions, and prospects,” Appl. Energy, vol. 222, no. March, pp. 1033–1055, 2018. [CrossRef]
- K. Erenoğlu, İ. Şengör, O. Erdinç, A. Taşcıkaraoğlu, and J. P. S. Catalão, “Optimal energy management system for microgrids considering energy storage, demand response, and renewable power generation,” Int. J. Electr. Power Energy Syst., vol. 136, no. November 2021, 2022. [CrossRef]
- M. Elsied, A. Oukaour, H. Gualous, and R. Hassan, “Energy management and optimization in microgrid system based on green energy,” Energy, vol. 84, pp. 139–151, 2015. [CrossRef]
- Patrao, E. Figueres, G. Garcerá, and R. González-Medina, “Microgrid architectures for low voltage distributed generation,” Renew. Sustain. Energy Rev., vol. 43, pp. 415–424, 2015. [CrossRef]
- Q. Fu, A. Q. Fu, A. Nasiri, A. Solanki, A. Bani-Ahmed, L. Weber, and V. Bhavaraju, “Microgrids: Architectures, Controls, Protection, and Demonstration,” Electr. Power Components Syst., vol. 43, no. 12, pp. 1453–1465, 2015. [CrossRef]
- E. Hossain, E. Kabalci, R. Bayindir, and R. Perez, “Microgrid testbeds around the world: State of art,” Energy Convers. Manag., vol. 86, pp. 132–153, 2014. [CrossRef]
- D. J. Hammerstrom, “AC versus DC distribution systems we get it right?,” 2007 IEEE Power Eng. Soc. Gen. Meet. PES, pp. 1–5, 2007. [CrossRef]
- Z. Jiang and X. Yu, “Hybrid DC- and AC-linked microgrids: Towards integration of distributed energy resources,” 2008 IEEE Energy 2030 Conf. ENERGY 2008, pp. 1–8, 2008. [CrossRef]
- M. Ahmed, L. M. Ahmed, L. Meegahapola, A. Vahidnia, and M. Datta, “Stability and Control Aspects of Microgrid Architectures-A Comprehensive Review,” IEEE Access, vol. 8, pp. 144730–144766, 2020. [CrossRef]
- V. B. Venkateswaran, D. K. V. B. Venkateswaran, D. K. Saini, and M. Sharma, “Environmental constrained optimal hybrid energy storage system planning for an Indian distribution network,” IEEE Access, vol. 8, pp. 97793–97808, 2020. [CrossRef]
- Iovine, T. Rigaut, G. Damm, E. De Santis, and M. D. Di Benedetto, “Power management for a DC MicroGrid integrating renewables and storages,” Control Eng. Pract., vol. 85, no. November 2018, pp. 59–79, 2019. [CrossRef]
- Arulampalam, M. Barnes, A. Engler, A. Goodwin, and N. Jenkins, “Control of power electronic interfaces in distributed generation Microgrids,” Int. J. Electron., vol. 91, no. 9, pp. 503–523, 2004. [CrossRef]
- X. Zhu, X. Q. Han, W. P. Qin, and P. Wang, “Past, today and future development of micro-grids in China,” Renew. Sustain. Energy Rev., vol. 42, pp. 1453–1463, 2015. [CrossRef]
- G. W. Arnold et al., “AC-microgrids versus DC-microgrids with distributed energy resources: A review,” Renew. Sustain. Energy Rev., vol. 8, no. 1, pp. 1–6, 2018. [CrossRef]
- M. Shahparasti, M. M. Shahparasti, M. Mohamadian, P. T. Baboli, and A. Yazdianp, “Toward power quality management in hybrid AC-DC microgrid using LTC-L utility-interactive inverter: Load voltage-grid current tradeoff,” IEEE Trans. Smart Grid, vol. 8, no. 2, pp. 857–867, 2017. [CrossRef]
- M. A. Hossain, H. R. M. A. Hossain, H. R. Pota, W. Issa, and M. J. Hossain, “Overview of AC microgrid controls with inverter-interfaced generations,” Energies, vol. 10, no. 9, pp. 1–27, 2017. [CrossRef]
- Alfergani, A. Khalil, and Z. Rajab, “Networked control of AC microgrid,” Sustain. Cities Soc., vol. 37, no. 17, pp. 371–387, 2018. 20 November. [CrossRef]
- G. Shahgholian, “A brief review on microgrids: Operation, applications, modeling, and control,” Int. Trans. Electr. Energy Syst., vol. 31, no. 6, pp. 1–28, 2021. [CrossRef]
- J. Justo, F. J. Justo, F. Mwasilu, J. Lee, and J. W. Jung, “AC-microgrids versus DC-microgrids with distributed energy resources: A review,” Renew. Sustain. Energy Rev., vol. 24, no. August, pp. 387–405, 2013. [CrossRef]
- S. R. Salkuti, “Challenges, issues and opportunities for the development of smart grid,” vol. 10, no. 2, pp. 1179–1186, 2020. [CrossRef]
- G. W. Arnold, “Challenges and opportunities in smart grid: A position article,” Proc. IEEE, vol. 99, no. 6, pp. 922–927, 2011. [CrossRef]
- Che and, M. Shahidehpour, “DC microgrids: Economic operation and enhancement of resilience by hierarchical control,” IEEE Trans. Smart Grid, vol. 5, no. 5, pp. 2517–2526, 2014. [CrossRef]
- E. Planas, J. Andreu, J. I. Gárate, I. Martínez De Alegría, and E. Ibarra, “AC and DC technology in microgrids: A review,” Renew. Sustain. Energy Rev., vol. 43, pp. 726–749, 2015. [CrossRef]
- M. A. Tavakkoli, A. Radan, and H. Hassibi, “Simulation and Analysis of a Compact Electronic Infrastructure for DC Micro-Grid: Necessity and Challenges,” Smart Grid Renew. Energy, vol. 03, no. 02, pp. 73–82, 2012. [CrossRef]
- F. Zhang et al., “Advantages and challenges of DC microgrid for commercial building: A case study from Xiamen University DC microgrid,” 2015 IEEE 1st Int. Conf. Direct Curr. Microgrids, ICDCM 2015, pp. 355–358, 2015. [CrossRef]
- T. Dragičević, X. Lu, J. C. Vasquez, and J. M. Guerrero, “DC Microgrids - Part II: A Review of Power Architectures, Applications, and Standardization Issues,” IEEE Trans. Power Electron., vol. 31, no. 5, pp. 3528–3549, 2016. [CrossRef]
- A. Ashok Kumar and, N. Amutha Prabha, “A comprehensive review of DC microgrid in market segments and control technique,” Heliyon, vol. 8, no. 11, p. e11694, 2022. [CrossRef]
- Pires and, A. Cordeiro, “and Challenges,” 2023.
- J. Kumar, A. J. Kumar, A. Agarwal, and V. Agarwal, “A review on overall control of DC microgrids,” J. Energy Storage, vol. 21, no. November 2018, pp. 113–138, 2019. [CrossRef]
- G. DING, F. G. DING, F. GAO, S. ZHANG, P. C. LOH, and F. BLAABJERG, “Control of hybrid AC/DC microgrid under islanding operational conditions,” J. Mod. Power Syst. Clean Energy, vol. 2, no. 3, pp. 223–232, 2014. [CrossRef]
- D. Jain and D. Saxena, “Comprehensive review on control schemes and stability investigation of hybrid AC-DC microgrid,” Electr. Power Syst. Res., vol. 218, no. January, p. 109182, 2023. [CrossRef]
- E. Unamuno and J. A. Barrena, “Hybrid ac/dc microgrids - Part I: Review and classification of topologies,” Renew. Sustain. Energy Rev., vol. 52, pp. 1251–1259, 2015. [CrossRef]
- P. Wang, L. Goel, X. Liu, and F. H. Choo, “Harmonizing AC and DC: A Hybrid AC/DC future grid solution,” IEEE Power Energy Mag., vol. 11, no. 3, pp. 76–83, 2013. [CrossRef]
- Aybar-Mejía, J. Villanueva, D. Mariano-Hernández, F. Santos, and A. Molina-García, “A review of low-voltage renewable microgrids: Generation forecasting and demand-side management strategies,” Electron., vol. 10, no. 17, pp. 1–25, 2021. [CrossRef]
- D. Fregosi et al., “A comparative study of DC and AC microgrids in commercial buildings across different climates and operating profiles,” 2015 IEEE 1st Int. Conf. Direct Curr. Microgrids, ICDCM 2015, pp. 159–164, 2015. [CrossRef]
- U. Manandhar, A. Ukil, and T. K. K. Jonathan, “Efficiency comparison of DC and AC microgrid,” Proc. 2015 IEEE Innov. Smart Grid Technol. - Asia, ISGT ASIA 2015, pp. 1–6, 2016. [CrossRef]
- Y. Tan, L. Meegahapola, and K. M. Muttaqi, “A review of technical challenges in planning and operation of remote area power supply systems,” Renew. Sustain. Energy Rev., vol. 38, pp. 876–889, 2014. [CrossRef]
- Q. Jiang, M. Xue, and G. Geng, “Energy management of microgrid in grid-connected and stand-alone modes,” IEEE Trans. Power Syst., vol. 28, no. 3, pp. 3380–3389, 2013. [CrossRef]
- Micallef, M. Apap, C. S. Staines, and J. M. G. Zapata, “Secondary control for reactive power sharing and voltage amplitude restoration in droop-controlled islanded microgrids,” Proc. - 2012 3rd IEEE Int. Symp. Power Electron. Distrib. Gener. Syst. PEDG 2012, pp. 492–498, 2012. [CrossRef]
- Marinescu and, I. Serban, “Robust frequency control for a wind/hydro autonomous microgrid,” 2011 IEEE PES Trondheim PowerTech Power Technol. a Sustain. Soc. POWERTECH 2011, pp. 1–6, 2011. [CrossRef]
- Pedrasa, T. Spooner, M. A. Pedrasa, and T. Spooner, “A Survey of Techniques Used to Control Microgrid Generation and Storage during Island Operation A Survey of Techniques Used to Control Microgrid Generation and Storage during Island Operation,” Pedrasa, M. A., Spooner, T., Pedrasa, M. A., Spooner, T. (2016). A Surv. Tech. Used to Control Microgrid Gener. Storage Dur. Isl. Oper. A Surv. Tech. Used to Control Microgrid Gener. Storage Dur. Isl. Oper., no. May, 2016.
- J. Kaushal and P. Basak, “A Decision-Making Methodology to Assess Power Quality Monitoring Index of an AC Microgrid Using Fuzzy Inference Systems,” Electr. Power Components Syst., vol. 47, no. 14–15, pp. 1349–1361, 2019. [CrossRef]
- M. Falahi, K. L. Butler-Purry, and M. Ehsani, “Induction motor starting in islanded microgrids,” IEEE Trans. Smart Grid, vol. 4, no. 3, pp. 1323–1331, 2013. [CrossRef]
- D. Wu, H. Wu, and H. Dongt, “Influence of induction motor starting on microgrid,” Asia-Pacific Power Energy Eng. Conf. APPEEC, vol. 2018-Octob, pp. 376–381, 2018. [CrossRef]
- S. Choudhury, “A comprehensive review on issues, investigations, control and protection trends, technical challenges and future directions for Microgrid technology,” Int. Trans. Electr. Energy Syst., vol. 30, no. 9, pp. 1–16, 2020. [CrossRef]
- O. Azeem et al., “A comprehensive review on integration challenges, optimization techniques and control strategies of hybrid ac/dc microgrid,” Appl. Sci., vol. 11, no. 14, 2021. [CrossRef]
- T. Murakami, “Agent-based simulations of the influence of social policy and neighboring communication on the adoption of grid-connected photovoltaics,” Energy Convers. Manag., vol. 80, pp. 158–164, 2014. [CrossRef]
- Kumar, A. R. Singh, Y. Deng, X. He, P. Kumar, and R. C. Bansal, “Integrated assessment of a sustainable microgrid for a remote village in hilly region,” Energy Convers. Manag., vol. 180, no. May 2018, pp. 442–472, 2019. [CrossRef]
- Kumar, A. R. Singh, Y. Deng, X. He, P. Kumar, and R. C. Bansal, “A Novel Methodological Framework for the Design of Sustainable Rural Microgrid for Developing Nations,” IEEE Access, vol. 6, pp. 24925–24951, 2018. [CrossRef]
- R. Singh, R. C. Bansal, A. R. Singh, and R. Naidoo, “Multi-Objective Optimization of Hybrid Renewable Energy System Using Reformed Electric System Cascade Analysis for Islanding and Grid Connected Modes of Operation,” IEEE Access, vol. 6, pp. 47332–47354, 2018. [CrossRef]
- Gopakumar, M. J. B. Reddy, and D. K. Mohanta, “Letter to the editor: Stability concerns in smart grid with emerging renewable energy technologies,” Electr. Power Components Syst., vol. 42, no. 3–4, pp. 418–425, 2014. [CrossRef]
- Gaur and, S. Singh, “Investigations on Issues in Microgrids,” J. Clean Energy Technol., vol. 5, no. 1, pp. 47–51, 2017. [CrossRef]
- S. K. Rathor and D. Saxena, “Energy management system for smart grid: An overview and key issues,” Int. J. Energy Res., vol. 44, no. 6, pp. 4067–4109, 2020. [CrossRef]
- S. Panda et al., “An Insight into the Integration of Distributed Energy Resources and Energy Storage Systems with Smart Distribution Networks Using Demand-Side Management,” Appl. Sci., vol. 12, no. 17, 2022. [CrossRef]
- S. F. Rafique and Z. Jianhua, “Energy management system, generation, and demand predictors: A review,” IET Gener. Transm. Distrib., vol. 12, no. 3, pp. 519–530, 2018. [CrossRef]
- Y. Xia, Y. Peng, P. Yang, M. Yu, and W. Wei, “Distributed Coordination Control for Multiple Bidirectional Power Converters in a Hybrid AC/DC Microgrid,” IEEE Trans. Power Electron., vol. 32, no. 6, pp. 4949–4959, 2017. [CrossRef]
- Yang, Y. Xia, M. Yu, W. Wei, and Y. Peng, “A Decentralized Coordination Control Method for Parallel Bidirectional Power Converters in a Hybrid AC-DC Microgrid,” IEEE Trans. Ind. Electron., vol. 65, no. 8, pp. 6217–6228, 2018. [CrossRef]
- Y. W. Li, D. M. Vilathgamuwa, and P. C. Loh, “A grid-interfacing power quality compensator for three-phase three-wire micro-grid applications,” PESC Rec. - IEEE Annu. Power Electron. Spec. Conf., vol. 3, no. 4, pp. 2011–2017, 2004. [CrossRef]
- Vinayagam, K. S. V. Swarna, S. Y. Khoo, A. T. Oo, and A. Stojcevski, “PV Based Microgrid with Grid-Support Grid-Forming Inverter Control-(Simulation and Analysis),” Smart Grid Renew. Energy, vol. 08, no. 01, pp. 1–30, 2017. [CrossRef]
- T. Muhammad et al., “An Adaptive Hybrid Control of Grid Tied Inverter for the Reduction of Total Harmonic Distortion and Improvement of Robustness against Grid Impedance Variation,” Energies, vol. 15, no. 13, 2022. [CrossRef]
- Anttila, J. S. Döhler, J. G. Oliveira, and C. Boström, “Grid Forming Inverters: A Review of the State of the Art of Key Elements for Microgrid Operation,” Energies, vol. 15, no. 15, pp. 1–30, 2022. [CrossRef]
- Mirsaeidi, D. M. Said, M. W. Mustafa, M. H. Habibuddin, and K. Ghaffari, “Review and analysis of existing protection strategies for micro-grids,” J. Electron. Syst., vol. 10, no. 1, pp. 1–10, 2014.
- Srivastava and, M. Tripathy, “DC microgrid protection issues and schemes: A critical review,” Renew. Sustain. Energy Rev., vol. 151, no. August, p. 111546, 2021. [CrossRef]
- A. A. Alkahtani et al., “Power Quality in Microgrids including Supraharmonics: Issues, Standards, and Mitigations,” IEEE Access, vol. 8, pp. 127104–127122, 2020. [CrossRef]
- R. Bayindir, E. Hossain, E. Kabalci, and K. M. M. Billah, “Investigation on North American microgrid facility,” Int. J. Renew. Energy Res., vol. 5, no. 2, pp. 558–574, 2015. [CrossRef]
- K. Prabaakaran, N. Chitra, and A. S. Kumar, “Power quality enhancement in microgrid - A survey,” Proc. IEEE Int. Conf. Circuit, Power Comput. Technol. ICCPCT 2013, pp. 126–131, 2013. [CrossRef]
- R. Pena, J. C. Clare, and G. M. Asher, “Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation,” IEE Proc. Electr. Power Appl., vol. 143, no. 3, pp. 231–241, 1996. [CrossRef]
- Jadidi, H. Badihi, and Y. Zhang, “Passive fault-tolerant model predictive control of AC/DC PWM converter in a hybrid microgrid,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 12097–12102, 2020. [CrossRef]
- Kumar and, K. Chatterjee, “Design and analysis of artificial bee-colony-based MPPT algorithm for DFIG-based wind energy conversion systems,” Int. J. Green Energy, vol. 14, no. 4, pp. 416–429, 2017. [CrossRef]
- B. Raju, B. G. Femandes, and K. Chatterjee, “Modeling and simulation of a grid-connected variable speed wind energy conversion system with low-cost power converters,” Renew. Energy Power Qual. J., vol. 1, no. 1, pp. 97–102, 2003. [CrossRef]
- H. Yoo, I. Y. Chung, H. J. Lee, and S. S. Hong, “Intelligent control of battery energy storage for multi-agent based microgrid energy management,” Energies, vol. 6, no. 10, pp. 4956–4979, 2013. [CrossRef]
- H. S. Sachdev, A. K. Akella, and N. Kumar, “Analysis and evaluation of small hydropower plants: A bibliographical survey,” Renew. Sustain. Energy Rev., vol. 51, pp. 1013–1022, 2015. [CrossRef]
- K. Okot, “Review of small hydropower technology,” Renew. Sustain. Energy Rev., vol. 26, pp. 515–520, 2013. [CrossRef]
- Paish, “Small hydro power: Technology and current status,” Renew. Sustain. Energy Rev., vol. 6, no. 6, pp. 537–556, 2002. [CrossRef]
- N. Walczak, “Operational evaluation of a Small Hydropower Plant in the context of sustainable development,” Water (Switzerland), vol. 10, no. 9, 2018. [CrossRef]
- W. Gil-González, O. D. Montoya, and A. Garces, “Modeling and control of a small hydro-power plant for a DC microgrid,” Electr. Power Syst. Res., vol. 180, no. 19, p. 106104, 2020. 20 May. [CrossRef]
- Sami, N. Ullah, S. M. Muyeen, K. Techato, S. Chowdhury, and J. S. Ro, “Control Methods for Standalone and Grid Connected Micro-Hydro Power Plants with Synthetic Inertia Frequency Support: A Comprehensive Review,” IEEE Access, vol. 8, no. September, pp. 176313–176329, 2020. [CrossRef]
- 5 Abrar Ahmed Chhip ˛a 1, Pr ˛asun Chakrabarti 2, Vadim Bolshev 3,*, Tulika Chakrabarti 4, Gennady Samarin 3 and S. G. 6 and A. K. 3 Alexey N. Vasilyev 3, “Modeling and Control Strategy of Wind Energy Conversion System with Grid-Connected Doubly-Fed Induction Generator,” MDPI, 2022.
- M. A. Smieee, A. Garmat, D. Popescu, S. Zidi, and L. Mazouz, “Modeling and control of wind energy conversion system,” 2016 5th Int. Conf. Syst. Control. ICSC 2016, pp. 377–382, 2016. [CrossRef]
- X. Hu, T. Wang, K. Chen, P. Ye, and L. Zhang, “Research on the control system for improving the grid-connected efficiency of small hydropower,” Energy Reports, vol. 9, pp. 772–783, 2023. [CrossRef]
- S. U. Khan et al., “Energy management scheme for an EV smart charger V2G/G2V application with an EV power allocation technique and voltage regulation,” Appl. Sci., vol. 8, no. 4, pp. 1–23, 2018. [CrossRef]
- M. C. Kisacikoglu, B. Ozpineci, and L. M. Tolbert, “EV/PHEV bidirectional charger assessment for V2G reactive power operation,” IEEE Trans. Power Electron., vol. 28, no. 12, pp. 5717–5727, 2013. [CrossRef]
- S. X. Chen, H. B. Gooi, and M. Q. Wang, “Sizing of energy storage for microgrids,” IEEE Trans. Smart Grid, vol. 3, no. 1, pp. 142–151, 2012. [CrossRef]
- Srividhya, R. Senthil Kumar, D. Hemanth Kumar, D. Mohan Raj, and A. Sham Prabu, “Energy Management System for Small-Scale Hybrid Wind Solar Battery-Based Microgrid,” EAI/Springer Innov. Commun. Comput., vol. 8, pp. 493–501, 2022. [CrossRef]
- W. S. Read, “IEEE Standards,” IEEE Power Eng. Rev., vol. 15, no. 1, pp. 6–7, 1995. [CrossRef]
- M. J. Davison, T. J. Summers, and C. D. Townsend, “A review of the distributed generation landscape, key limitations of traditional microgrid concept & possible solution using an enhanced microgrid architecture,” Proc. - 2017 IEEE South. Power Electron. Conf. SPEC 2017, vol. 2018-Janua, pp. 1–6, 2018. [CrossRef]
Figure 1.
Basic structure of a microgrid.
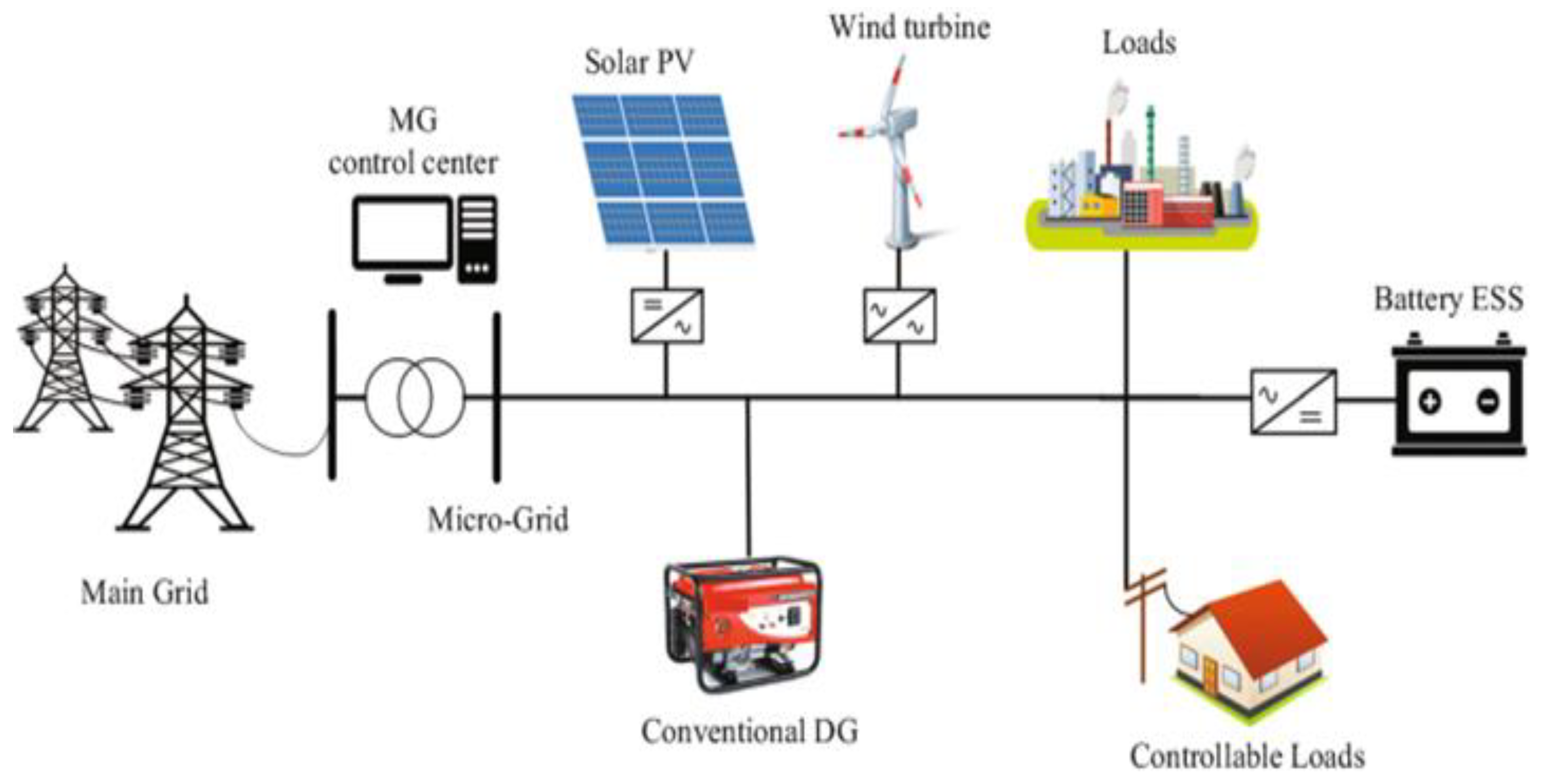
Figure 2.
One-line diagram of the utility Grid under investigation.
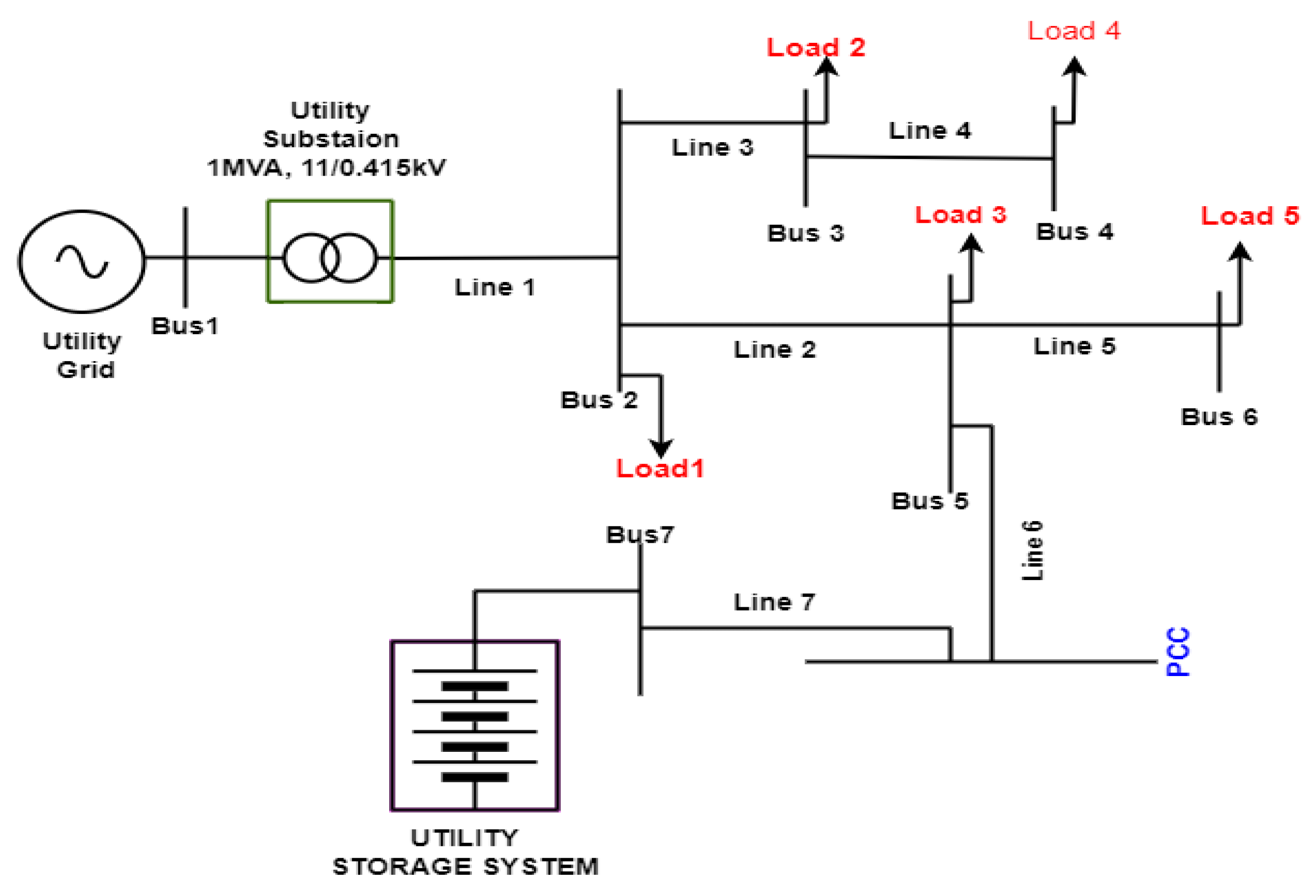
Figure 3.
Microgrid under investigation
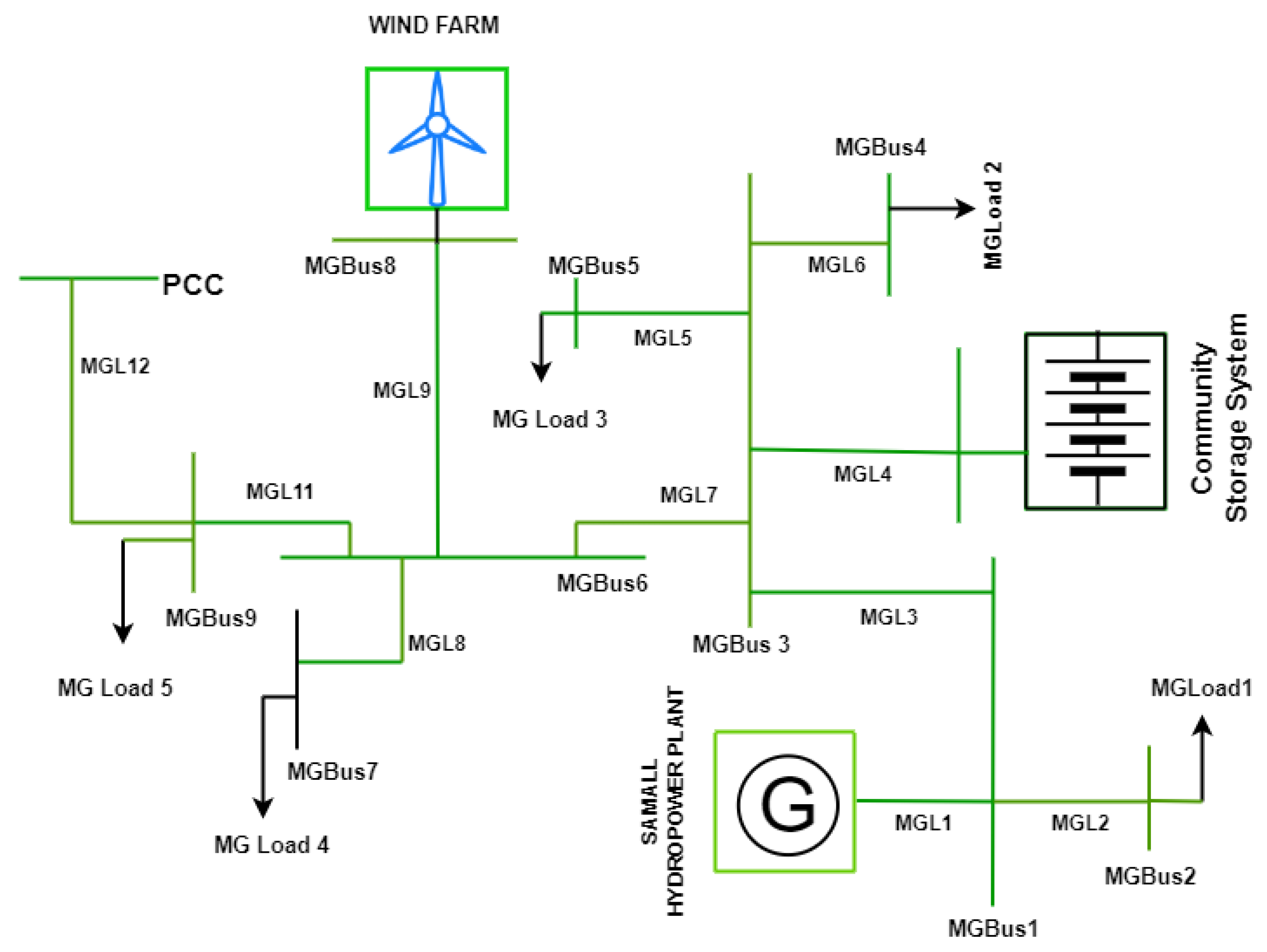
Figure 4.
Wind energy conversion system with control system.
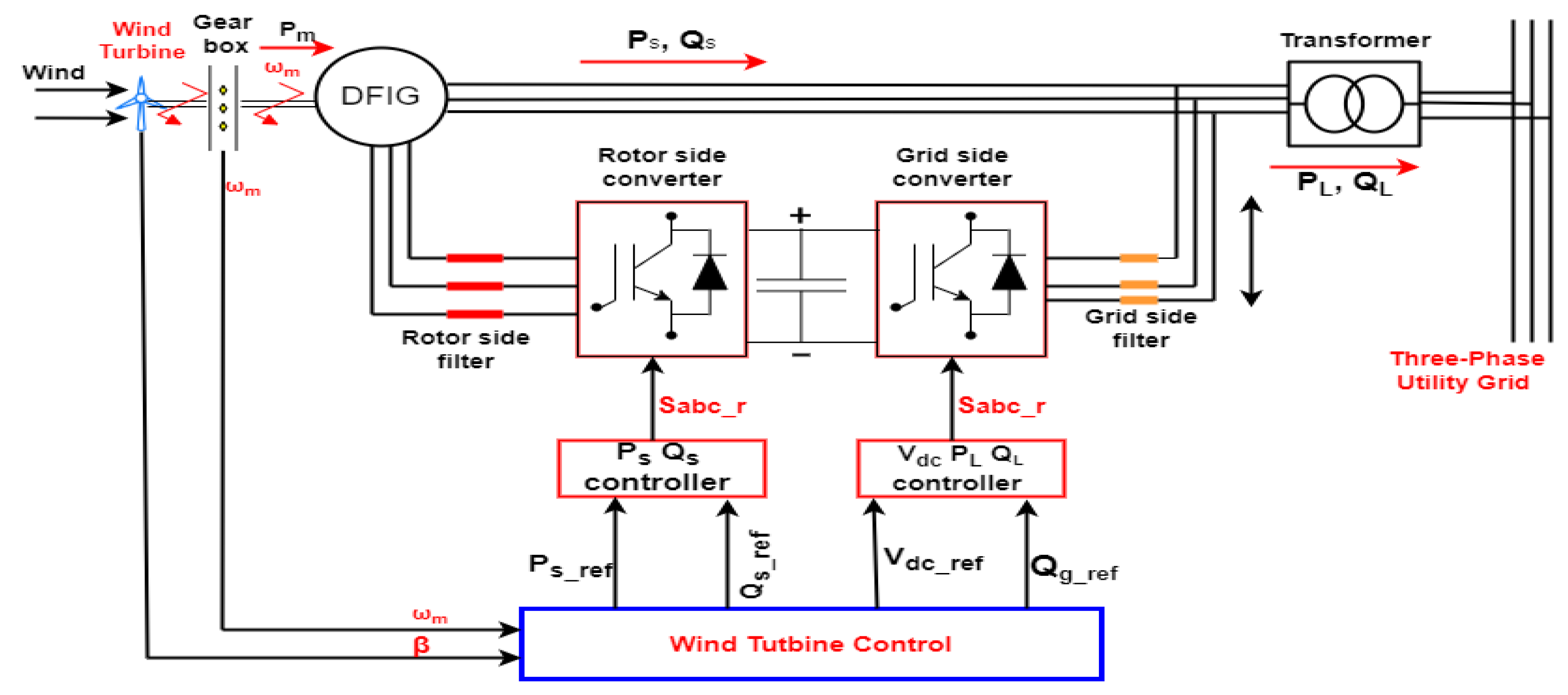
Figure 5.
Wind turbine and Rotor speed characteristics.
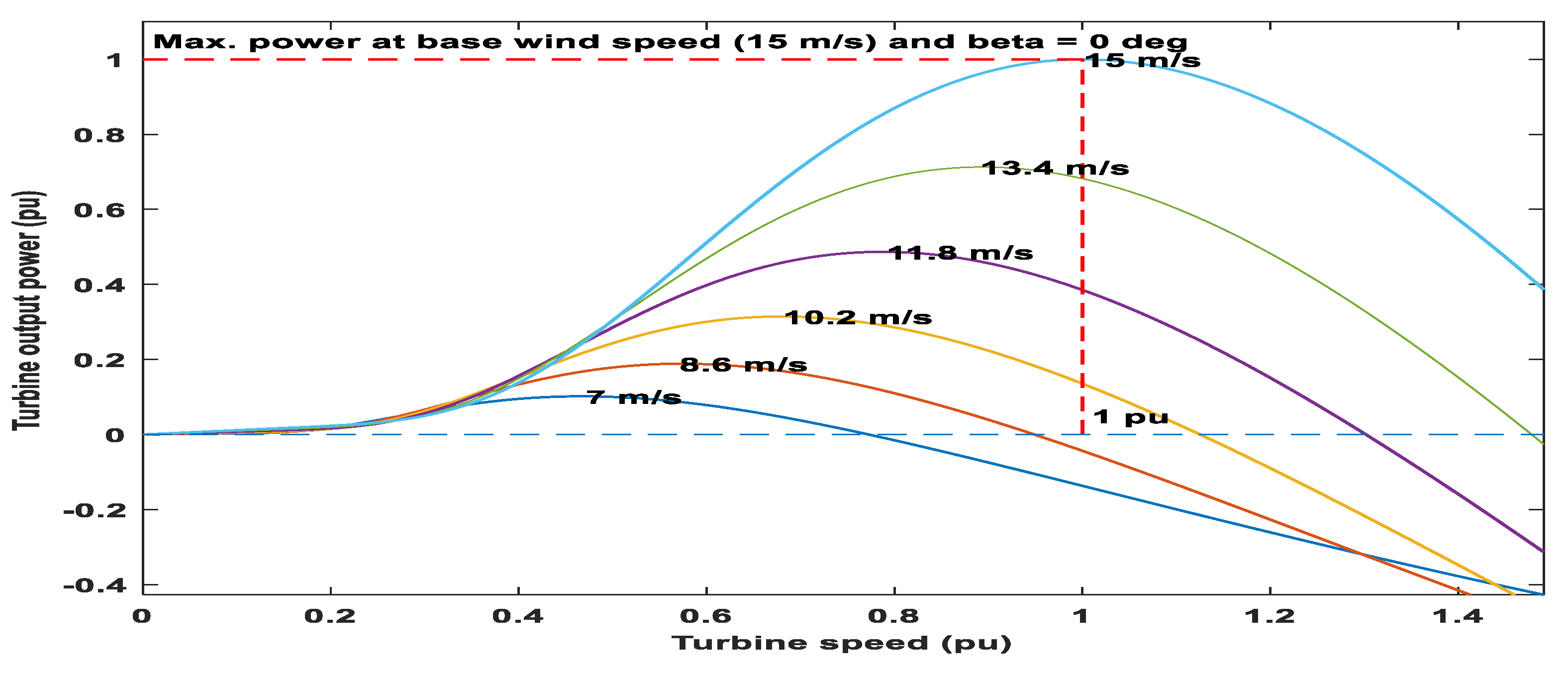
Figure 6.
Schematic diagram of wind farm layout
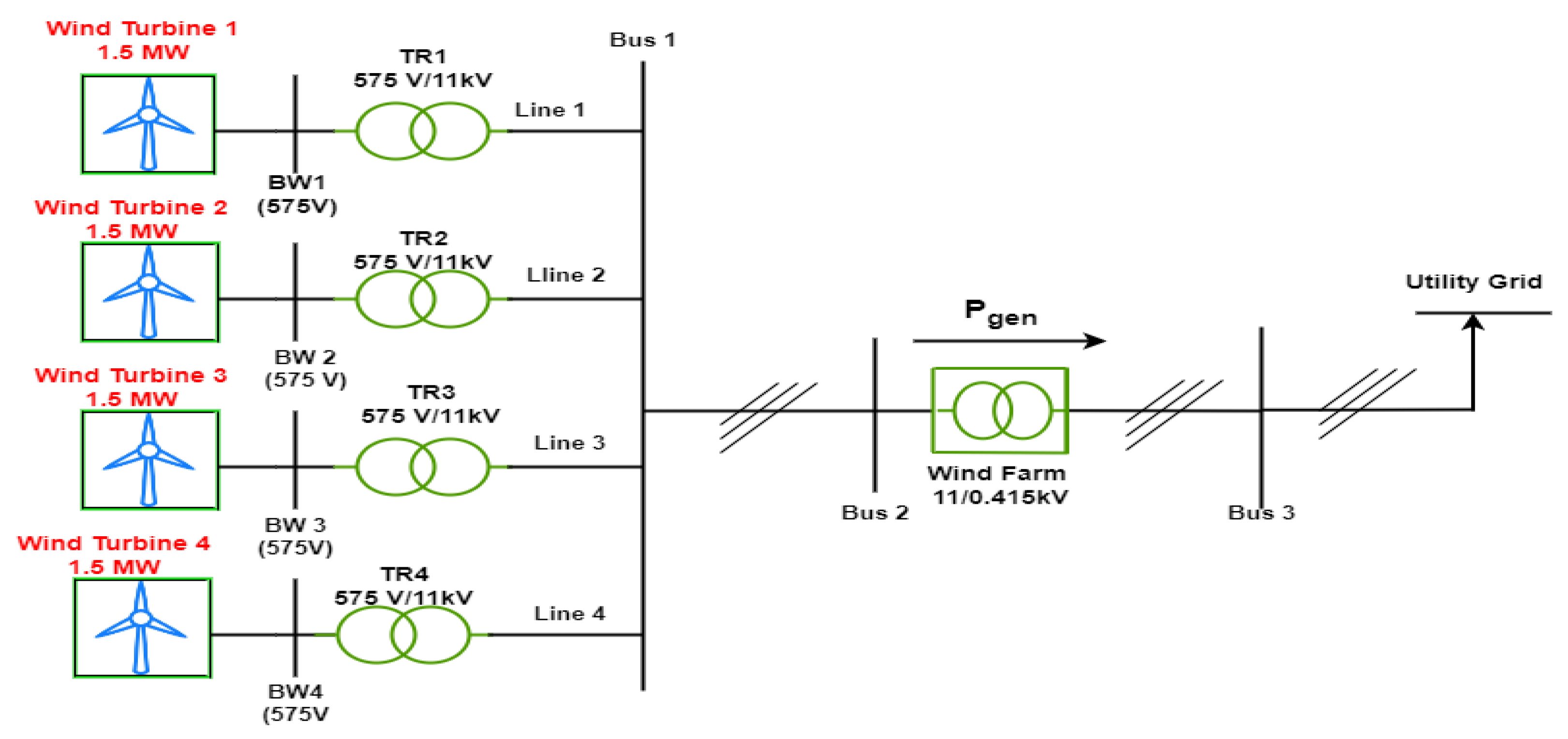
Figure 7.
Layout diagram of a small hydropower energy conversion system.
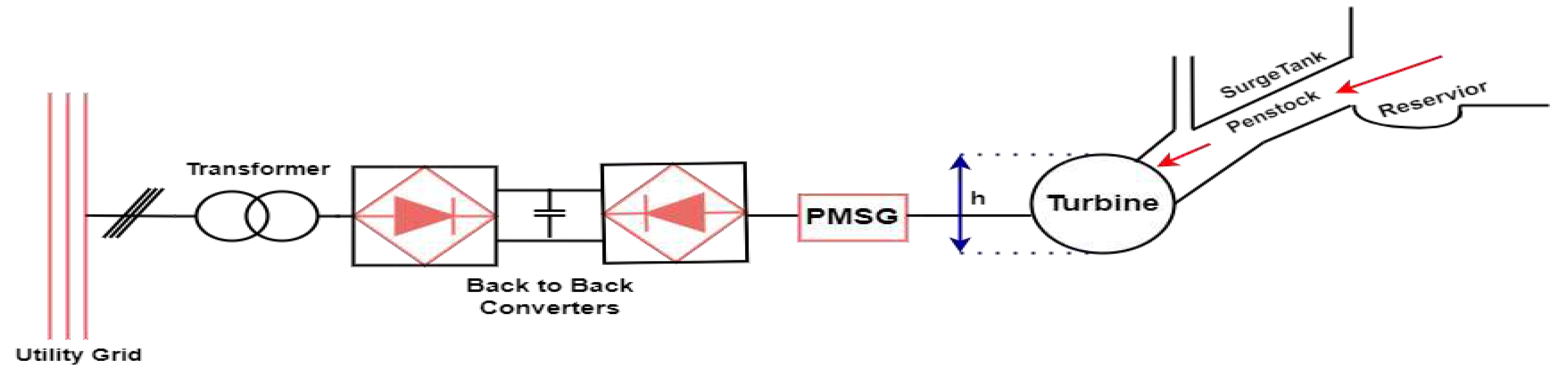
Figure 8.
Complete schematic diagram of small hydropower plant control system
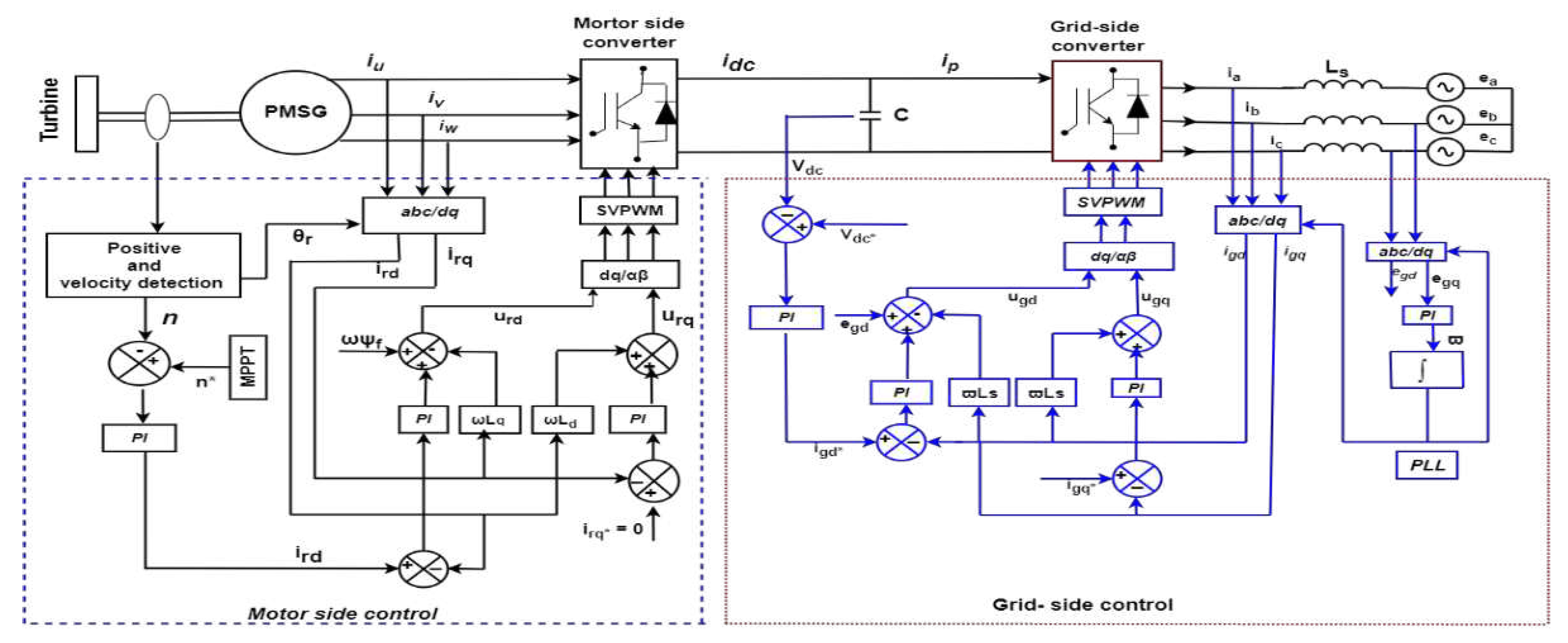
Figure 9.
Bidirectional battery storage system with controller.
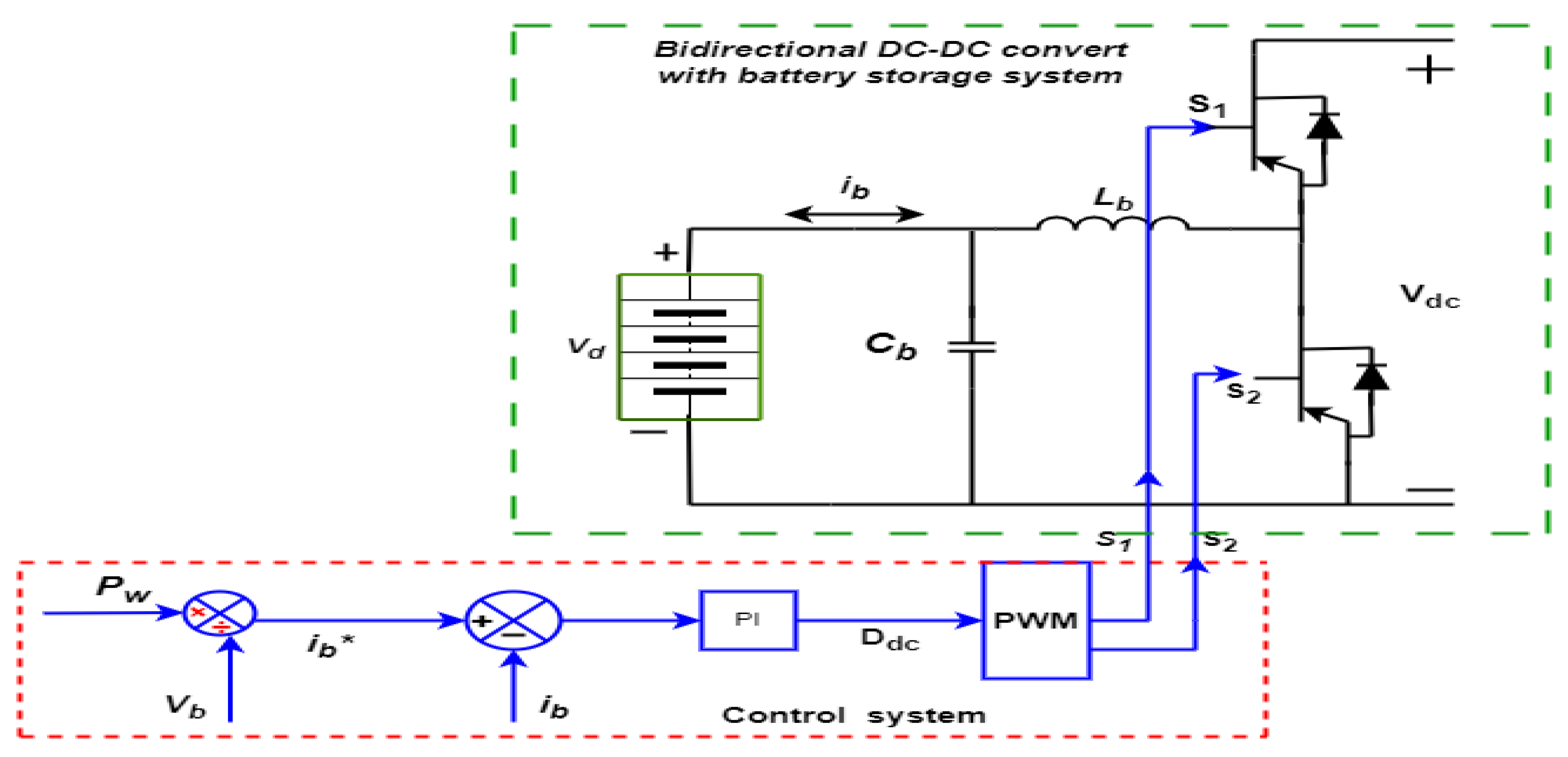
Figure 10.
Complete a one-line diagram of the system under investigation.
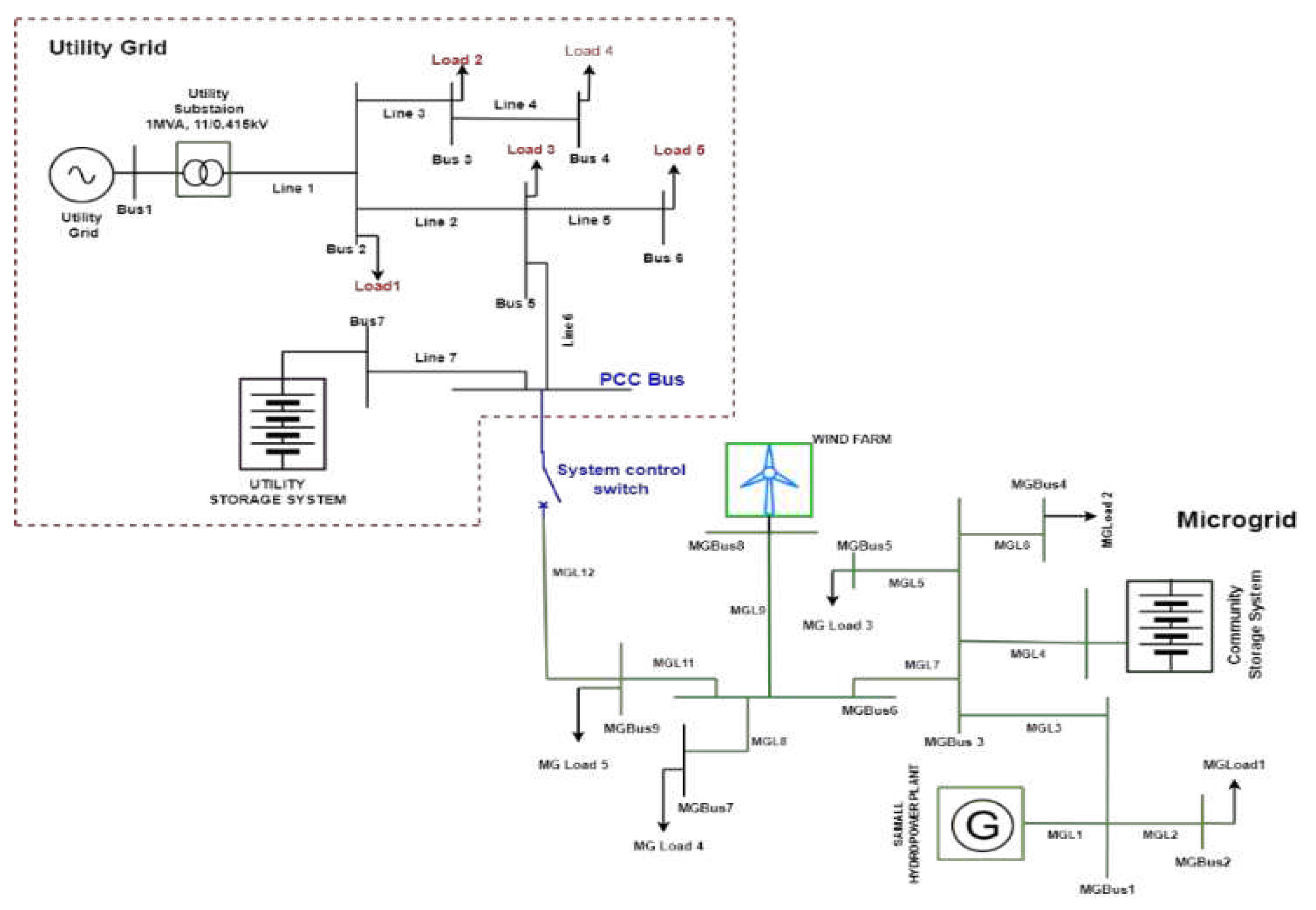
Figure 11.
System performance during normal operation. (a) PCC voltage, current, and power; (b) Utility and microgrid voltage and current; (c) Utility and Microgrid energy storage characteristics.
Figure 11.
System performance during normal operation. (a) PCC voltage, current, and power; (b) Utility and microgrid voltage and current; (c) Utility and Microgrid energy storage characteristics.
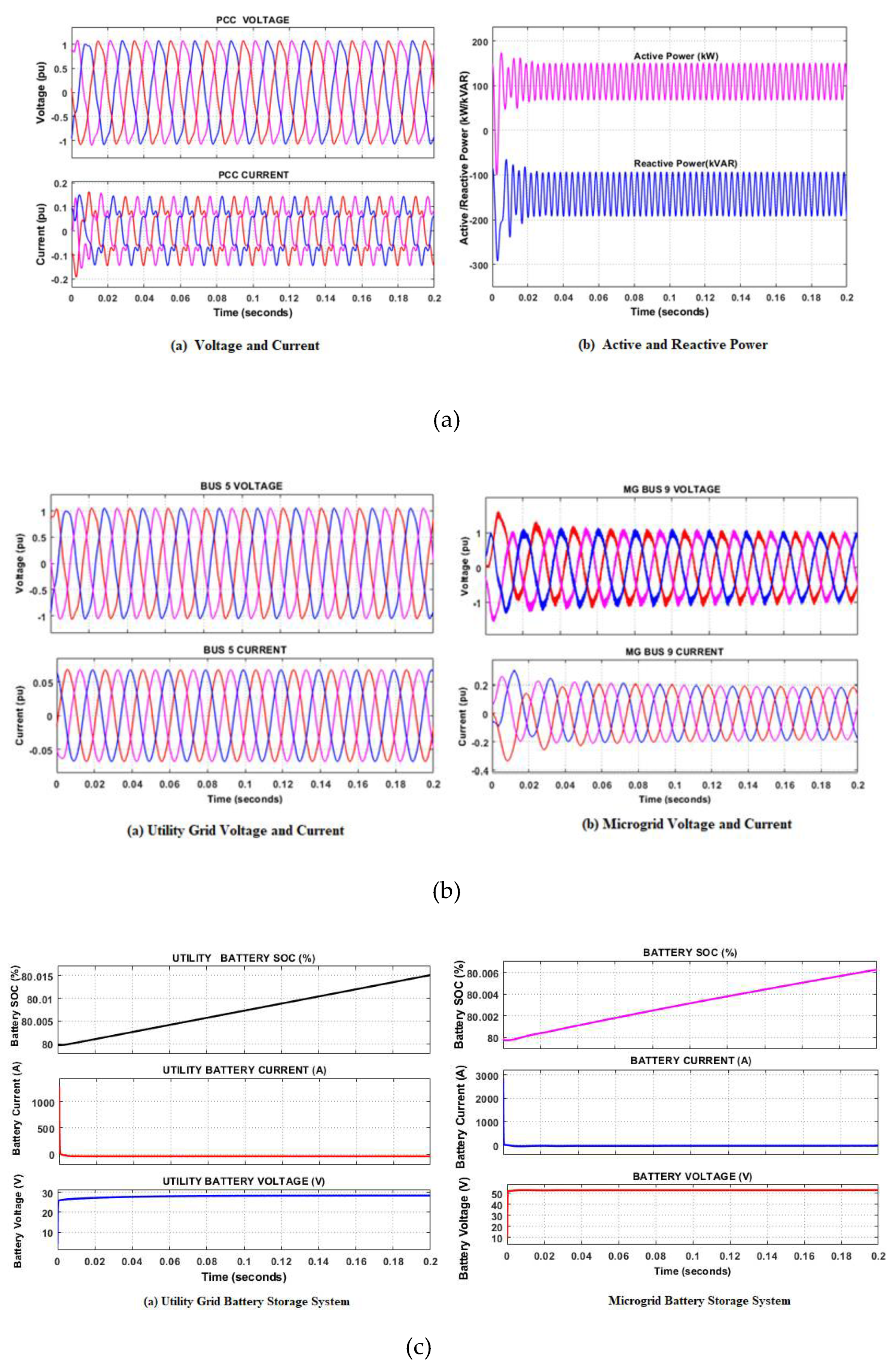
Figure 12.
Three phase-phase fault scenarios at the Utility Grid: (a) Voltage, current, and power at PCC; (b Voltage and current at selected buses on the utility and microgrid sides.
Figure 12.
Three phase-phase fault scenarios at the Utility Grid: (a) Voltage, current, and power at PCC; (b Voltage and current at selected buses on the utility and microgrid sides.
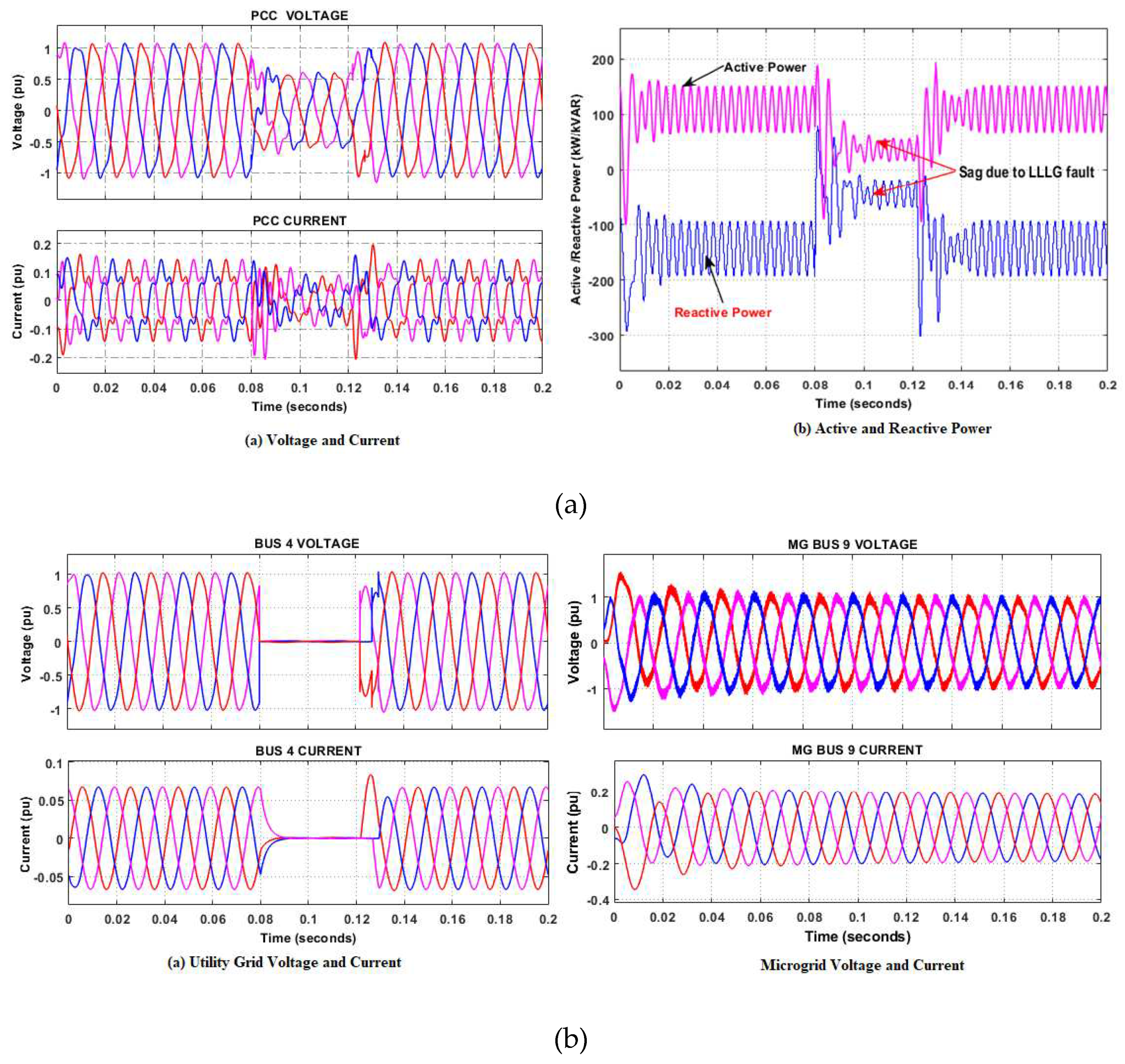
Figure 13.
Three phase-phase fault scenarios at the Utility Grid side; (a) Voltage, current, and power at PCC, (b) Voltage and current at selected buses on utility and microgrid sides.
Figure 13.
Three phase-phase fault scenarios at the Utility Grid side; (a) Voltage, current, and power at PCC, (b) Voltage and current at selected buses on utility and microgrid sides.
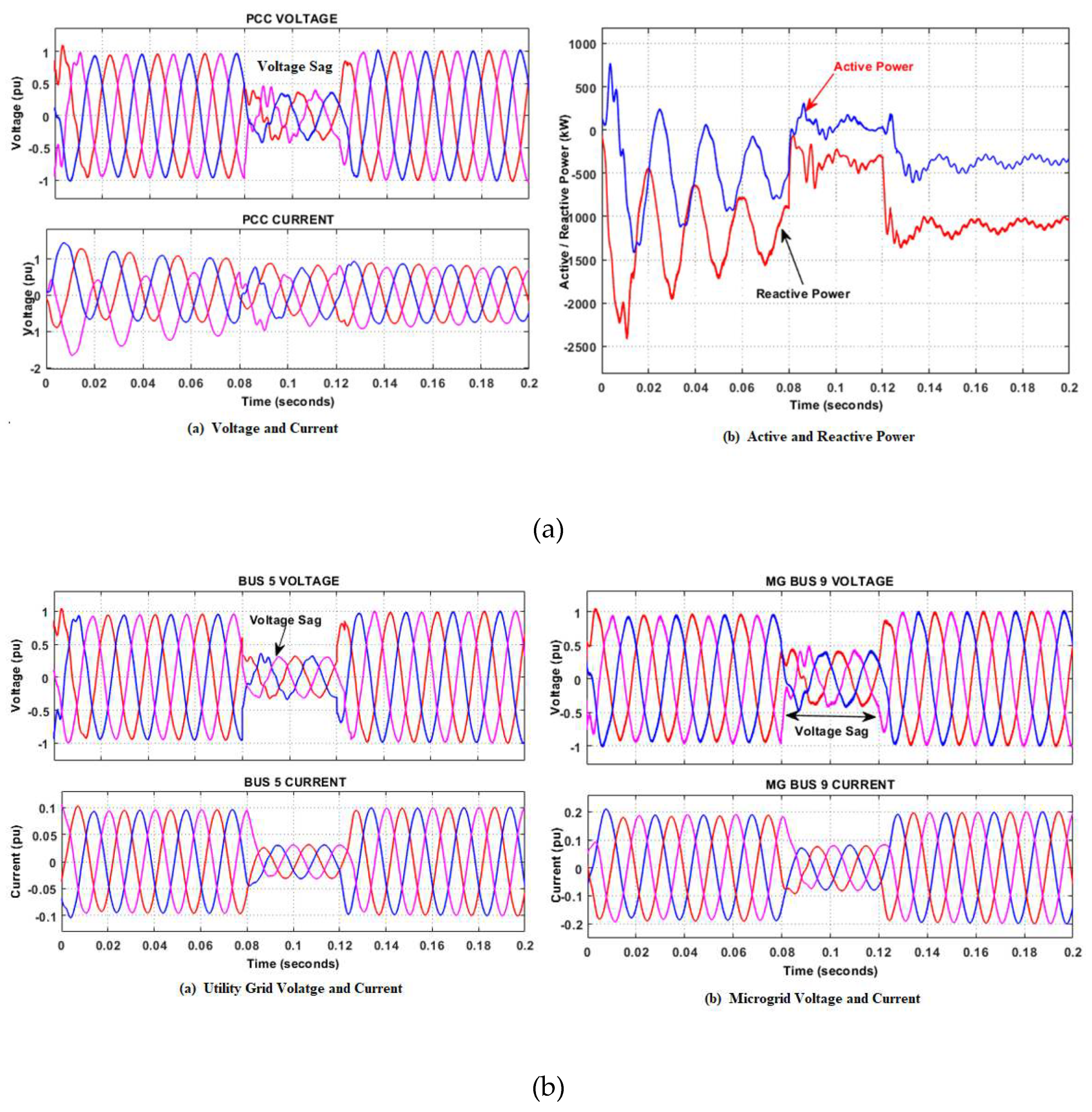
Figure 14.
Transition waveforms from grid connected to stand-alone operating mode: (a) PCC and Utility grid Bus 5 voltage and current (b) Utility energy storage characteristics (c) Microgrid MGBus 3 Voltage and Current (d) Microgrid battery storage waveforms.
Figure 14.
Transition waveforms from grid connected to stand-alone operating mode: (a) PCC and Utility grid Bus 5 voltage and current (b) Utility energy storage characteristics (c) Microgrid MGBus 3 Voltage and Current (d) Microgrid battery storage waveforms.
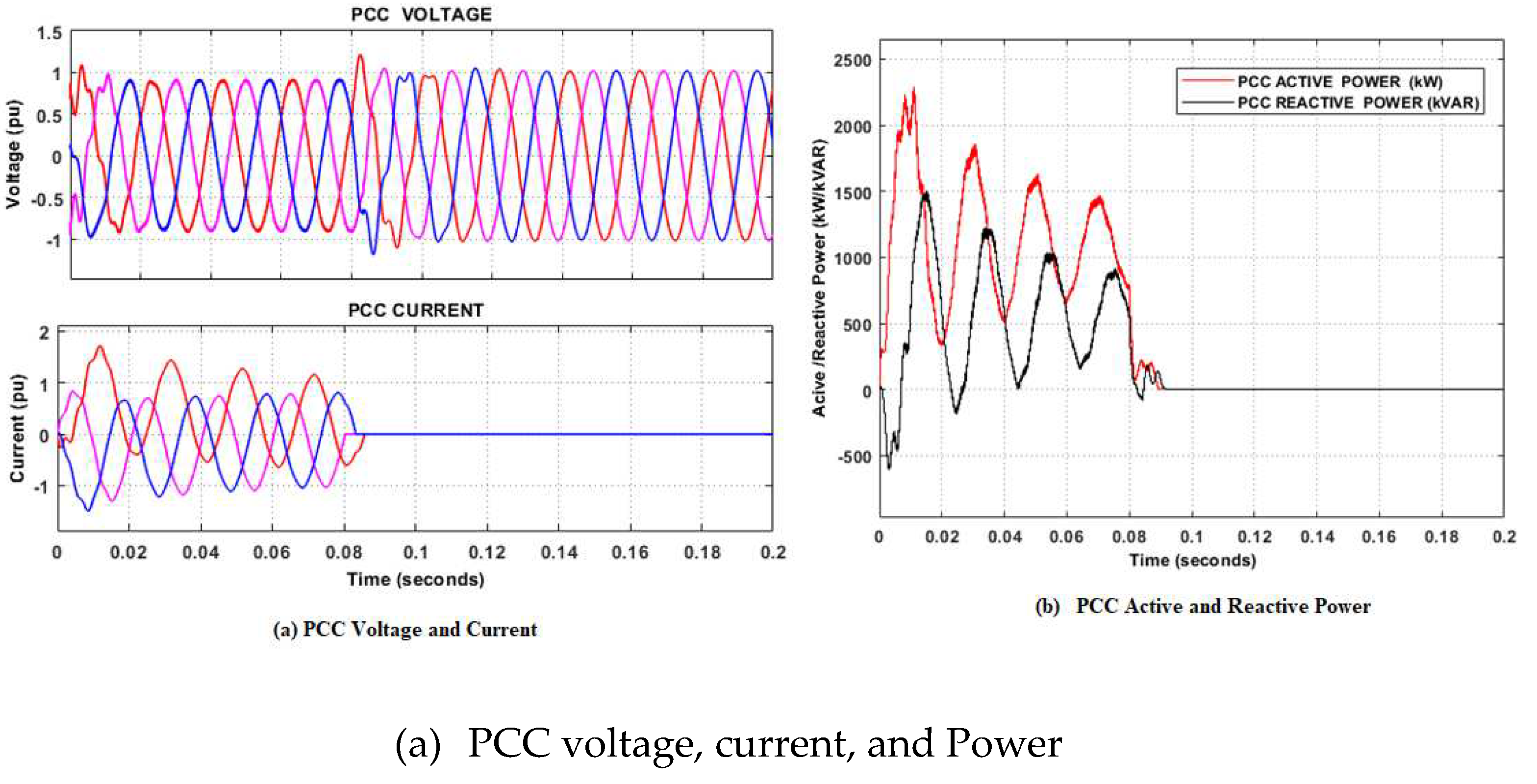
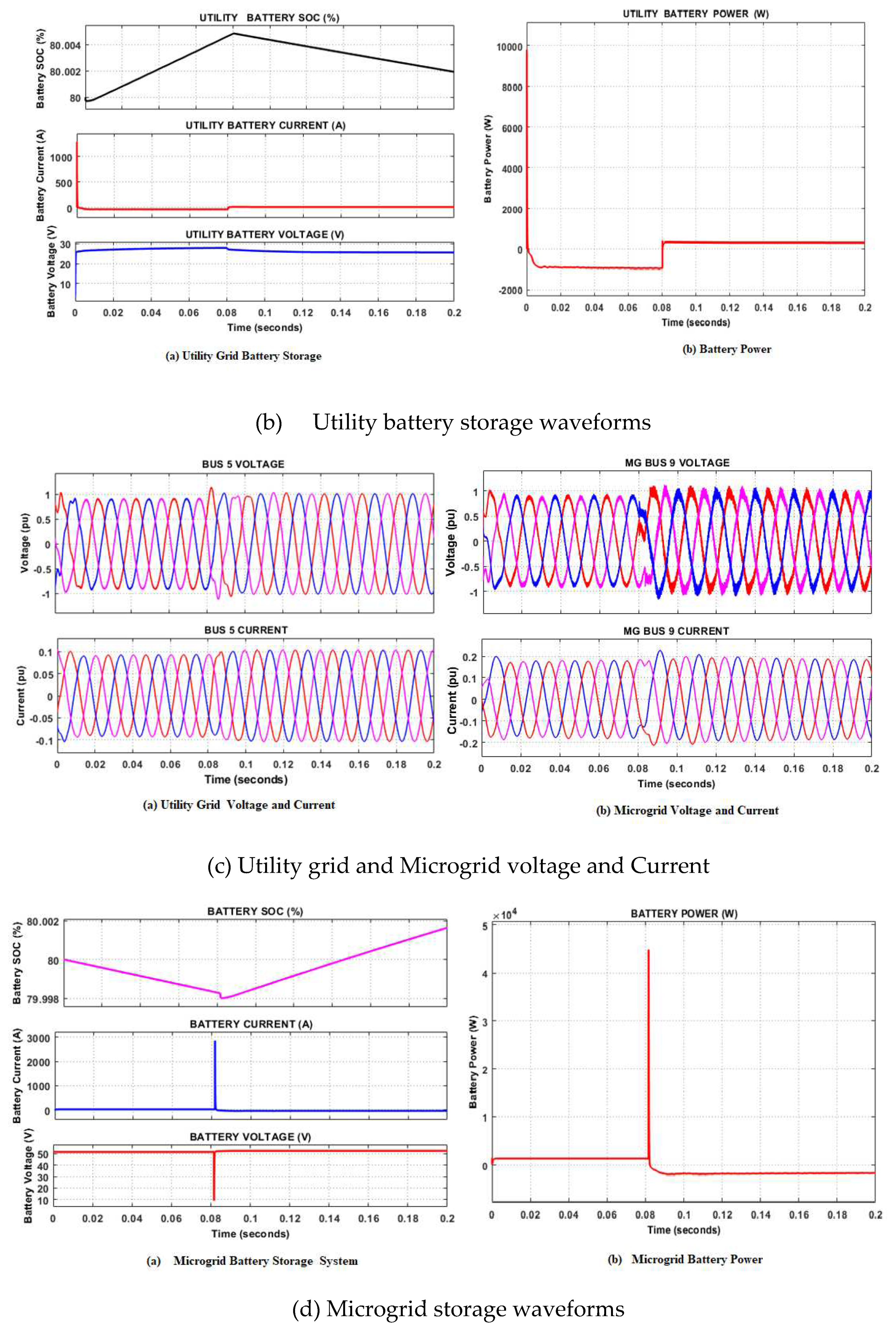
Figure 15.
System performance during increases in microgrid generation; (a) PCC voltage current and power; (b) Utility grid energy storage characteristics (c) Utility grid and Microgrid (MGBus 3) Voltage and Current (d) Microgrid Battery storage characteristics.
Figure 15.
System performance during increases in microgrid generation; (a) PCC voltage current and power; (b) Utility grid energy storage characteristics (c) Utility grid and Microgrid (MGBus 3) Voltage and Current (d) Microgrid Battery storage characteristics.
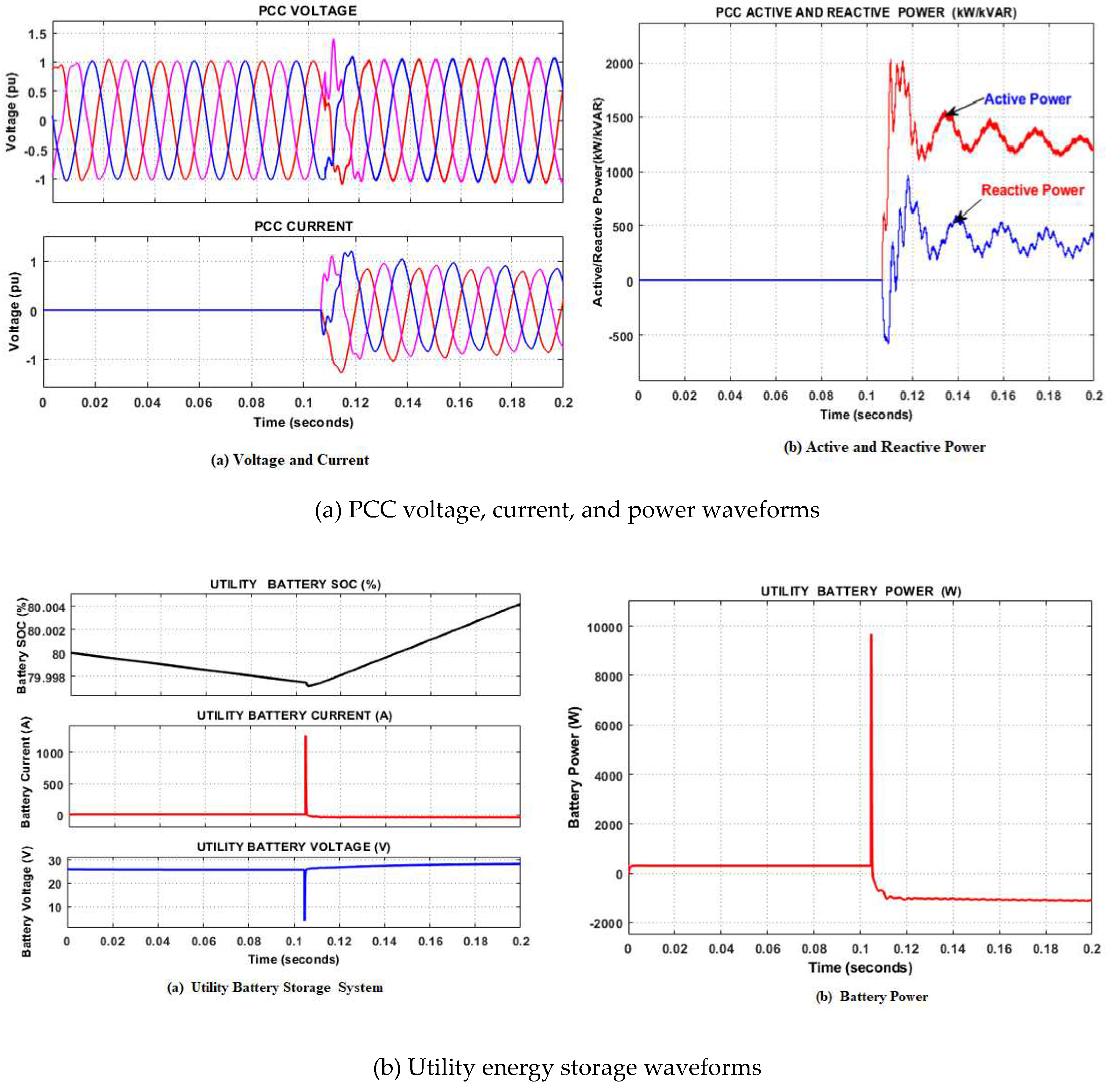
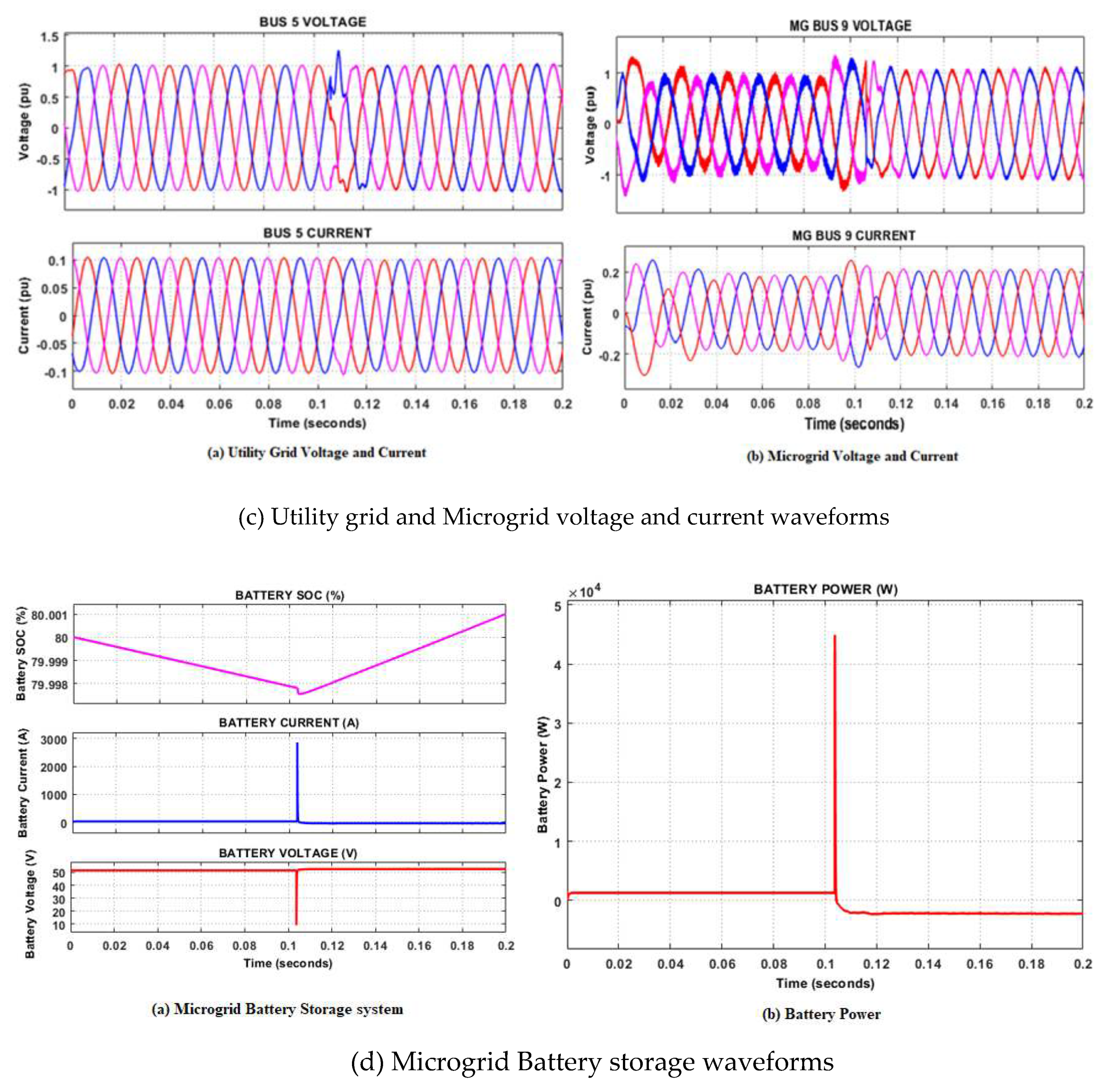
Figure 16.
System performance during an increase in loading; (a) PCC voltage, Current, and Power; (b) Utility grid and Microgrid voltage and current.
Figure 16.
System performance during an increase in loading; (a) PCC voltage, Current, and Power; (b) Utility grid and Microgrid voltage and current.
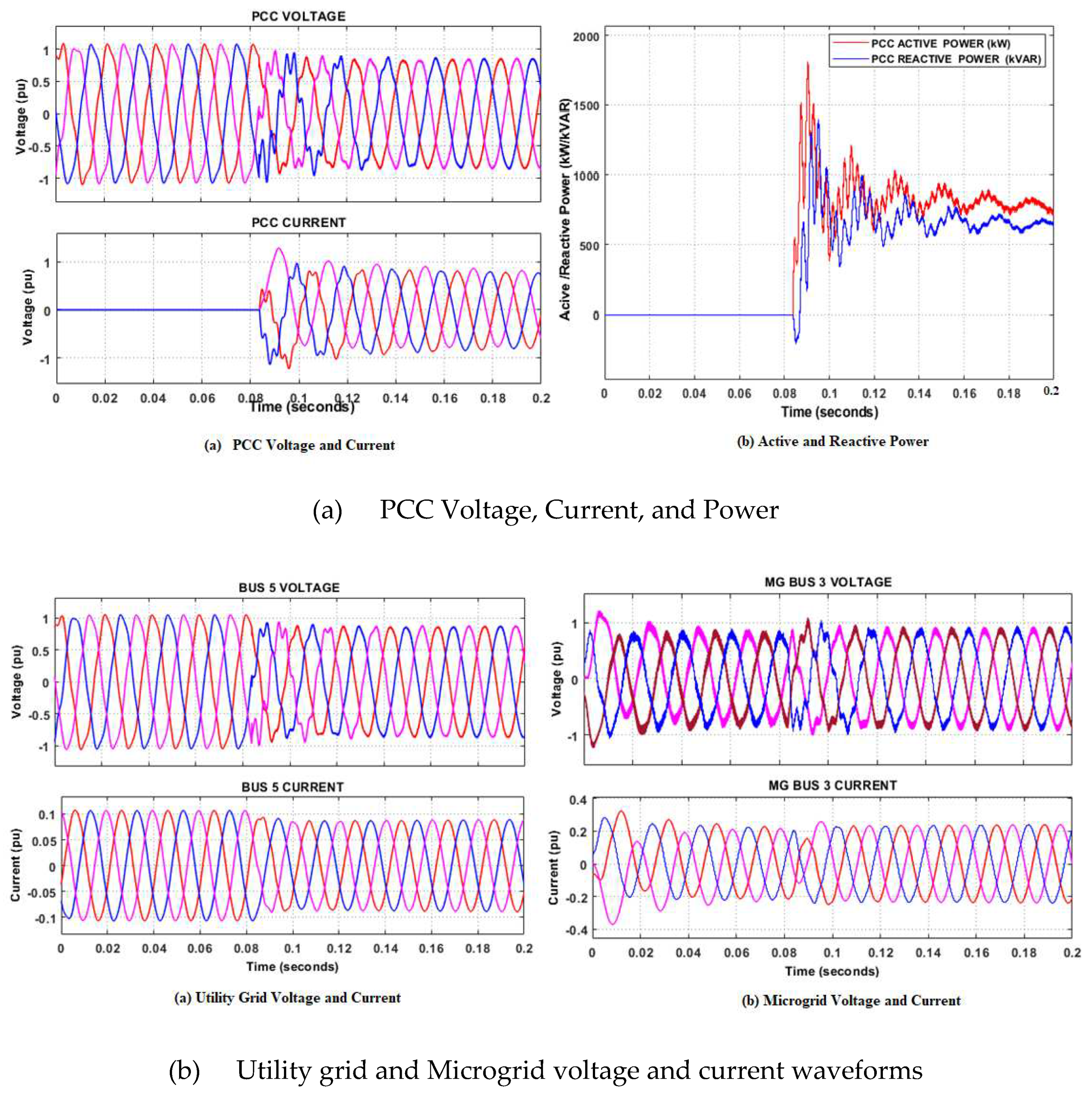
Figure 17.
System performance during a reduction in microgrid loading system; (a) PCC voltage current and power; (b) Utility grid and Microgrid voltage and current.
Figure 17.
System performance during a reduction in microgrid loading system; (a) PCC voltage current and power; (b) Utility grid and Microgrid voltage and current.
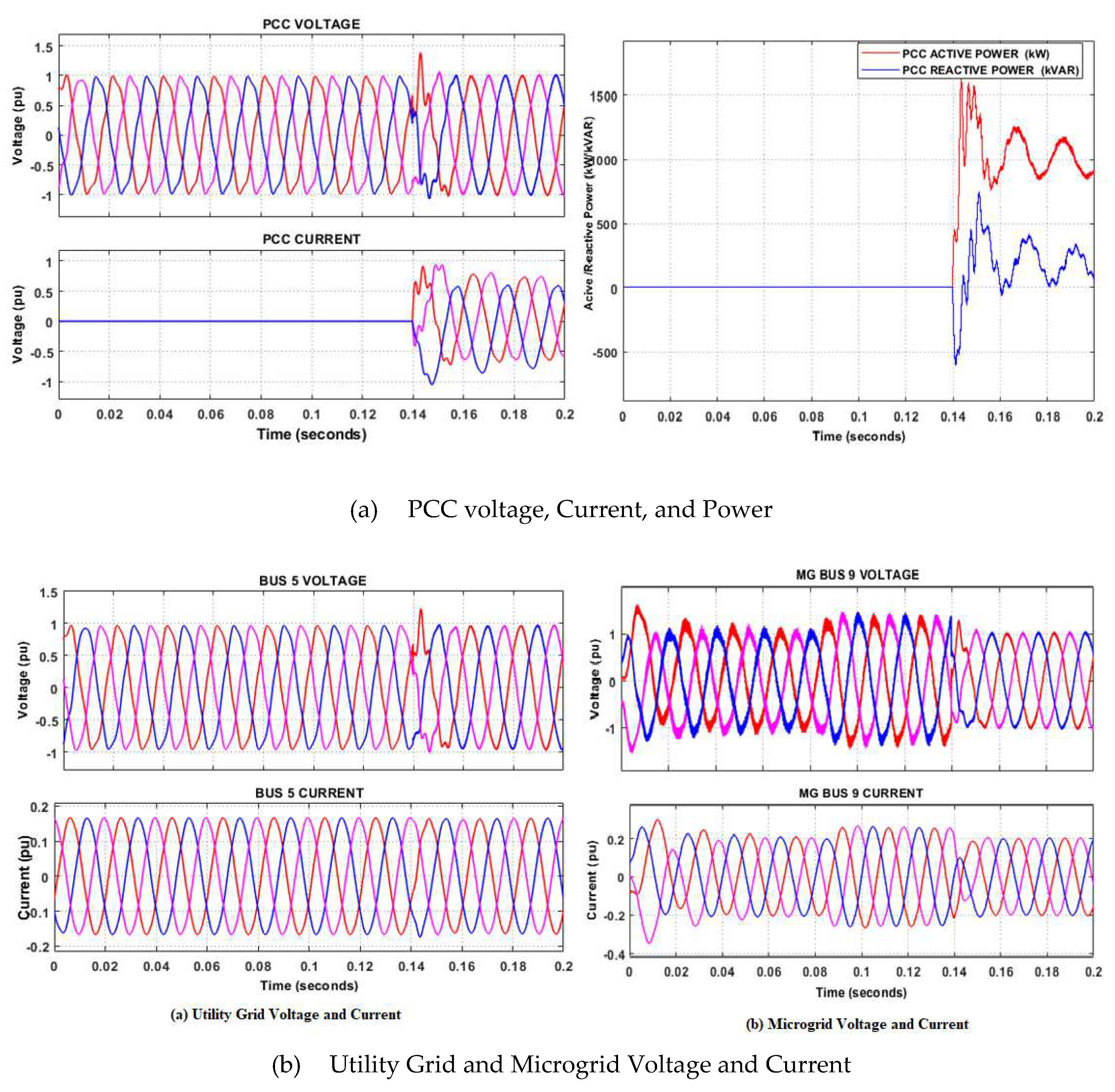
Figure 18.
System performance during micro-source de-energized; (a) PCC voltage and current (b) Utility grid and microgrid voltage and current.
Figure 18.
System performance during micro-source de-energized; (a) PCC voltage and current (b) Utility grid and microgrid voltage and current.
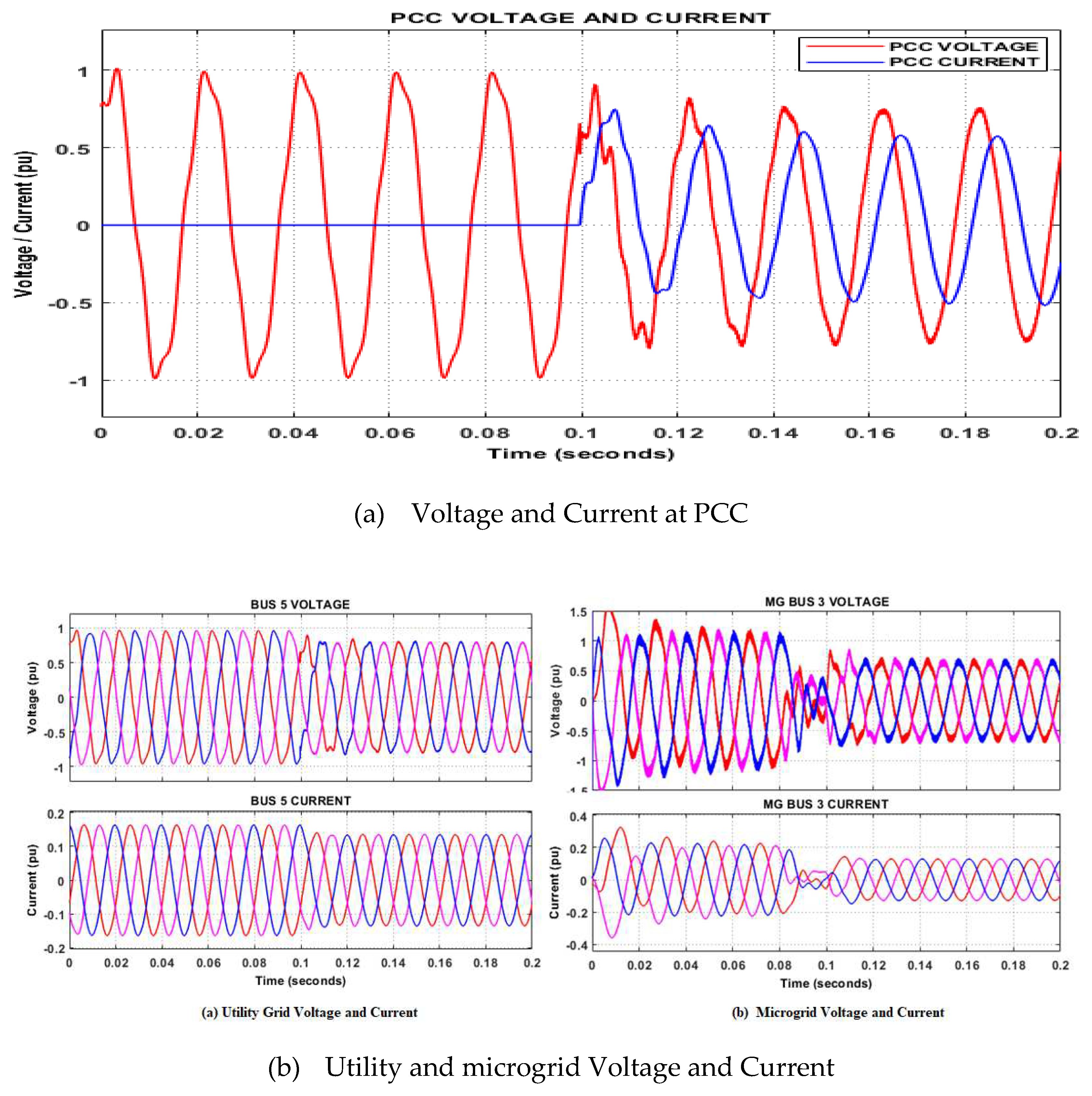

Table 1.
Technical Benefits of Microgrid
| Parameter | Description |
|---|---|
| Stable and reliable power supply | As a stand-alone power supply unit, the microgrid provides support to the utility grid whenever there is an electricity generation shortage or outage until the grid is restored. MGs enhance voltage-frequency stability for all local loads by operating autonomously. |
| Reduce transmission and distribution losses | Reduction in the long transmission line, transmission, and distribution losses due to nearness to the customers. |
| Reduce system. capacity |
Microgrids enhance the high penetration of RESs to distribution networks. It provides additional power to local loads during peak demand, thus reducing strain on distribution lines. |
| Bidirectional power flow | Integration of the microgrids into the existing distribution networks alters the direction of power flow from the traditional unidirectional to bidirectional, thus improving system reliability and stability. It permits efficient utilization of excess power generated. |
Table 2.
Utility grid load and line parameters.
|
Load Parameters |
Utility Grid Load and Line Parameters | |||||
|---|---|---|---|---|---|---|
| Load Parameters | Line Parameters | |||||
| Active Power (kW) |
Reactive Power (kVAR) |
Line | Length (km) |
Resistance (Ω/km) |
Inductance (H/km) |
|
| Load 1 | 40 | 38 | Line1 | 0.15 | 0.0127 | 0.000814 |
| Load 2 | 35 | 25 | Line2 | 0.15 | 0.0127 | 0.000814 |
| Load 3 | 40 | 38 | Line 3 | 0.15 | 0.0127 | 0.000814 |
| Load 4 | 35 | 25 | Line 4 | 0.15 | 0.0127 | 0.000814 |
| Load 5 | 35 | 25 | Line 5 | 0.15 | 0.0127 | 0.000814 |
| Line 6 | 0.15 | 0.0127 | 0.000814 | |||
| Line 7 | 0.15 | 0.0127 | 0.000814 | |||
Table 3.
Wind turbine and wind farm parameters.
| Turbine Parameters | Value | Unit |
|---|---|---|
| Nominal output power | 1.5 | MW |
| Rated Voltage | 55 | V |
| Stator Resistance | 0.004843 | pu |
| Stator Inductance | 0.1248 | pu |
| Rotor Resistance | 0.004377 | pu |
| Rotor Inductance | 0.1791 | pu |
| Magnetizing Inductance | 6.77 | pu |
| Friction Factor | 0.01 | pu |
| Base Wind Speed | 15 | m/s |
| Cut-in Wind Speed | m/s | |
| Maximum Pitch Angle | 45 | |
| Generator Pole Pairs | 3 | |
| Power Coefficient | 0.48 | |
| Wind Farm Rating | 6 | MW |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



