
Submitted:
22 October 2023
Posted:
23 October 2023
You are already at the latest version
Abstract
This paper provides a data set collected with an underground shaft mobile mapping system equipped with rotated Velodyne VLP-16, Velodyne Ultra Puck VLP-32c, Livox Tele-15, and IMU Xsens MTi-30. The ground truth data was acquired with a geodetic survey including 15 ground control points and 6 Faro Focus 3D Terrestrial Laser Scanner stations of a total 273,784,932 of 3D measurement points. The aim of the paper is to describe the data set of a mining shaft. Obtained mobile mapping data can be the basis for detailed analyzes of the technical condition of the shaft. This data set provides an end-user case study of realistic applications in mobile mapping technology. It provides ground truth data, mobile mapping data and software tools for manipulation and visualization. The project is released and maintained at https://michalpelka.github.io/mine-mapping-dataset/.
Keywords:
LiDAR
; IMU
; undreground shaft mapping
; mine mapping
1. Introduction
Mapping was conducted on November 2021 using the wireline mobile laser scanning platform. The measurements were divided into three parts: classic geodetic measurements aimed at making georeference to the surveys, Terrestrial Laser Scanning, and mobile scanning. The works began with setting out scanning targets at available levels on the shaft structure as reference points. Then, geodetic surveys were obtained to determine the XYZ coordinates of the mounted targets. The position of the targets was determined with an average error from a few to several millimeters, depending on the accuracy of the mine’s network at a given underground level. The uncertainties are given in Table 4.
The measurements were made on 6 levels.
The goal of this paper is to share a data set collected with an underground mining shaft mobile mapping system shown in Figure 1. It is equipped with rotated Velodyne VLP-16, Velodyne Ultra Puck VLP-32c, Livox Tele-15, IMU Xsens MTi-30 robotics and geodetic communities. Ground truth data was obtained with a geodetic survey using Leica TS11 (Figure 2) and Faro Focus 3D (Figure 3) over the entire underground mining shaft shown in Figure 4. This data set provides measures obtained in salt crystals underground mining shaft shown in Figure 5 and Figure 6.
The ground truth data are delivered as 15 ground control points and 6 stationary 3D scans performed on different levels for covering the entire shaft. The purpose of the measurements was to make a detailed and accurate 3D map of the shaft which is to be renovated and rebuilt. The mining shaft has not been used for years, which makes it impossible to carry out any measurements inside it with the participation of a human - staying inside is not safe due to its technical condition. Adamek and Będkowski (2021) show that performing classic geodetic surveys using mobile mapping is limited. The basic task for the success of the mapping, in that case, was to perform classical geodetic measurements to create a georefrence and calibration base in relation to the existing mine network of geodetic points. Also, a number of stationary scans were made on the surface and on a few underground levels of mining excavations. The shaft currently has a ventilation function. At the depth of the first 60 meters, it has a "barrel" cross-section, and then down to the bottom, the shaft lining is circular. The shaft has neither built-up guides nor the hoisting machine to slide down. In this situation, it was only possible to perform remote measurements using laser scanning technology to obtain 3D spatial data. Due to technical limitations, it was decided to construct a measuring system that would be lowered into the shaft from the surface. Thus, it provides full coverage of the shaft. All data is released and maintained at https://michalpelka.github.io/mine-mapping-dataset/.
2. Motivation
Obtaining such high-quality data in a shaft area is difficult and that it is available for use is rare. There are datasets for underground mining such as work by [4] which presents a robotic dataset collected from the largest underground copper mine in the world. The sensor measurements were recorded from an approximately two-kilometer traverse of a excavation tunnel. An interesting benchmark by [3] provides underground data acquired with Riegl VZ-400 Terrestrial Laser Scanner. Another example is a work by [5] providing a dataset that encapsulates various complex urban features and addresses the major issues of complex urban areas, such as unreliable and sporadic Global Positioning System (GPS) data, multi-lane roads, complex building structures, and the abundance of highly dynamic objects. Similarly, dataset from [6] relates to the urban scenario, but it contains over 100 repetitions of a consistent route through Oxford, UK, captured over a period of over a year. The main motivation behind our shaft survey, according to our best knowledge, is a lack of such datasets even some research in this domain is evidently shown by [8]. For this reason, we claim to fulfil the gap between available datasets. This work can be used for study several aspects in Simultaneous Localisation and Mapping [9], Lidar odometry [2] and mine shaft mapping [1].
3. Sensors
The mobile mapping dataset consists three LiDARs:
- Livox TELE-15
- Velodyne Puck VLP-16 assembled to rotating turntable
- Velodyne Ultra Puck VLP-32c
and XSens MTi-30 IMU that can be used for motion model generation. The coordinate frames for each sensor are shown in Figure 1 and denoted in Table 1 with respect to Livox TELE-15.
These sensors offer a different set of features. The first sensor has narrow (16.2 degrees) conical field-of-view that points downwards. It is a design that is meant for automotive use and provides a detection range up to 500 meters. The sensor provides its user with non-repetitive scanning. It is not a solid-state design, it consists an optical system built around rotating Risley prisms. The explanation of this technology is discussed by [11]. The second sensor is low-resolution spinning LiDAR that is enhanced with a turntable. It spins the whole VLP-16 around its horizontal axis. With the calibrated system and synchronized rotation angle, it provides a wide, omnidirectional field of view. The range is 100 meters. The last sensor is similar to the second one, but has twice more lasers (channels). It is mounted on the mast and titled to the side. This setup maintains uniform density with depth. Its field of view is narrow and points to the walls of the shaft. The drawing of the system is shown in Figure 1. The top part of the system contains a computer and batteries. On the very top, the lifting eye bolt is attached enabling suspension of the system. The whole assembly is carefully lowered using a winch. This geometric configuration of LiDARs enables calibration of the entire system without the need for external patterns since all fields of view are overlapping. Table 2 denotes the basic parameters of the sensor and links to documentation. Table 3 denotes the parameters of the TLS system that was utilized.
4. Data set overview
Data set is composed of ground truth and mobile mapping data. Ground truth is composed of 273,784,932 of 3D measurement points and 15 ground control points shown in Figure 9.
4.1. Ground truth
We provided two types of ground truth data, accurate 3D point cloud data and accurate positions of georeferenced markers obtained with geodetic survey. Accurate point cloud data is obtained with state of the art Iterative Closest Point method assuming TLS stations, Livox Tele15 local scans and correspondences between manually picked 3D points and georeferenced markers. We provided initial guess of the trajectory calculated with Iterative Closest Point method applied for local point clouds from Livox Tele15. The scanning pattern of mobile mapping system was to start from surface and go down to level VIII with continuous velocity 0.15 m/s. Due to the fact that the shaft was unavailable for direct measurement, as well as it was not possible to perform mobile scanning using the Mining Survey System [1], a workflow methodology was developed for the purpose of scanning the shaft. The ventilation function of the shaft means that it has to be constantly monitored. Thanks to this, the geodetic control points still exists within the mine. On the other hand, the age and a profile of the mine are determined by the order of accuracy of this benchmarks - up to a few centimeters on lower underground levels. The measurement methodology assumed the installation of the scanning targets shown in Figure 8 (minimum 2 pcs) in the area of the shaft pipe inlets on each available level, so that their position in relation to the geodetic mine network could be determined. It’s also needed to be visible on stationary (Figure 9) and mobile scans (Figure 10) made when the system was exited in the shaft during the mapping. In addition, for the adjust of the point cloud to the external coordinate system and for a better calibration of mobile scans a TLS was planned at underground levels of mining excavations. Scans was made also in the "light" of the pipe shaft in the "up" and "down" laser scanner head position. Thus providing a bigger area of common coverage for mobile scanning, given also additional information for calibration the wireline mobile scanning system and given georeference to all data. This survey results in ground truth data that is composed of 15 ground control points shown in Figure 9 with global coordinates given in Table 4 and 6 stationary scans given in Table 5. The uncertainty of determining the coordinates of the scanning targets consists of two factors: the accuracy of determining the control points - the geodetic control network (transferring the coordinates from the surface to a given level - this is a measurement made a few or several years earlier) and the accuracy of the measurement of the scanning targets (ground control points) at the time of shaft scanning. Based on our best knowledge it is difficult to determine with what accuracy the coordinates was laid (put on) underground a few years ago, but we can estimate these values knowing the precision of the measurement techniques used for this purpose. It is assumed that the average error of mechanical plumbing is 2-3 mm per 100 meters plus the accuracy of classic geodetic measurements of single point. Therefore, it can be assumed that the accuracy of the control points should oscillate from 5-6 mm on the first 100 meters to 1.5-2 cm on 300 meters. Because mistakes add up, to these values we must add the measurement of the targets mounted during the shaft scanning. In this case, we must take into account the accuracy of determination the total station position based on the existing control points and the measurement of the centers of the scanning targets. Regardless of the level at which this measurement is made, the average value is 5 mm. The error of pointing to the control point and the accuracy of distance measurements (Figure 7). Taking this into account, we can assume that the uncertainty of the control points ranged from 2-3 mm on the surface up to 2 centimeters at -290 depth (level VIII). But this is the optimistic assumption that the underground control points network has been stabilized with adequate accuracy in the past. We believe that this potential issue will be investigated based on this data set in future.
4.2. Data structure
The data from all sensors in the mobile system is stored in ROS bag files. Each file contains ten minutes of data streams. During the trial, which lasted for 68 minutes, the total number of points collected by the system is as follows:
- VLP16: 845 million points.
- VLP32c: 2.30 billion points.
- TELE-15: 970 million points.
The whole dataset is divided into multiple rosbag files. Files `mine_mapping_001.bag - mine_mapping_007.bag` contains sensors’ streams. The file `mine_mapping_trajectory.bag` contains transformation from `map` to `base_link` with the inital trajectory. The VLP16 and VLP32c LiDARs are configured to spin at a frequency of 10 Hz. The scanning frequency remained constant throughout the trial period. However, the density of points in the output point cloud varies depending on occlusions and the distance from the sensor. The datastreams are organized into the following topics:
- ’/imu’ - Datastream provided by XSens IMU with hardware timestamp.
- ’/velodyne_rot’ - Datastream provided by VLP-16, transformed by rotation, with hardware timestamp.
- ’/velodyne’ - Datastream provided by VLP-32C, in the local coordinate system, with hardware timestamp.
- ’/livox’ - Datastream provided by TELE-15, in the local coordinate system, with hardware timestamp.
- ’/tf’ - Dynamic transformation (rotation) of the VLP16.
- ’/tf_static’ - Static transformation carrying CAD calibration.
The data provided by the LiDARs (VLP-16, VLP-32C, and TELE-15) is organized into messages of type ’sensor_msgs/PointCloud2’. The hardware timestamp is embedded in every point in the "time" channel. The same hardware timestamps are presented in all headers in the rosbag.
5. Electronic design
The important feature of the whole mobile mapping system is its hardware timestamp. The main component here is a microcontroller that provides all devices with hardware timestamps. The implementation is pragmatic - the microcontroller produces PPS (Pulse per second) signal that is fed to all LiDARs. The microcontroller is also responsible for collecting the data from an incremental encoder that was assembled in the turntable (rotated VLP-16 shown in Figure 1 labeled as 3). The hardware synchronization was achieved by following the recommendations from the manufacturers and utilizing the technique presented in previous work [10]. To summarize, the system incorporates hardware synchronization signals for every measurement device. The microcontroller and LiDARs provide multiple UDP streams that require synchronization, with each LiDAR measurement being timestamped. Additionally, the data from the rotated Velodyne VLP-16 LiDAR needs to be associated with the actual rotation angle. To achieve this, a multi-threaded process with multiple open ports collects data from the LiDARs running on the computer. The software development kits (SDKs) provided by the manufacturers are utilized to parse the binary data generated by the LiDARs. The implementation leverages associative containers from the C++ standard library, ensuring robustness and efficiency. Finally, the synchronized data stream is serialized and stored on a hard drive using the ROS (Robot Operating System) framework. The operator of the system has access to telemetric data over a wireless network. That telemetric data, in the form of web service, allows the operator to start or stop data collection. Remote control was crucial due to safety reasons.
6. Quantitative and qualitative analysis of mobile mapping data
This data set is ready for performing benchmarks. Figure 11 shows horizontal cross-section of shaft with all available lidar data. Figure 12 shows quantitative result: a histogram showing distribution of distances between mobile mapping system (Livox TELE-15, VLP-16 and VLP-32c) and ground truth. Figure 13 and Figure 14 shows vertical cross section with the distance all mobile mapping data < 0.25m than ground truth. Thus, we claim that this data set is initially aligned to ground truth. The calibration was performed using ICP algorithm and used software and dataset is available [7].
7. Final remarks
TLS scanning was performed with the Faro Focus 3D phase scanner and was carried out in such a way as to register the scanning targets and the inner part of the shaft. Similarly to georeferencing, the TLS scanning was performed at the levels: surface, level I, IV, V, VI, and the shaft bottom at level VIII. The location of levels is shown in Figure 4. The scans were performed in the way described above - scanning head at the zenith and the head down at the nadir. In order to obtain a good view of the shaft, the scanner was "ejected" as far as possible into the shaft’s middle on a specially prepared mounting holder (as shown in Figure 3). This concept resulted in greater shaft coverage with panoramic laser data - "precise" scans. The levels selected for TLS scanning are approximately spaced apart at comparable distances, which made it possible to introduce corrections to the determined trajectory of the mobile scanning system. Along with the Z coordinates, the ladder descent inside the shaft - the part accessible for people - from the surface to level I was also scanned which gave several meters of accurate point cloud inside the shaft. The last stage of measurements was the wireline mobile scanning of the shaft pipe, which was carried out from the surface to the shaft bottom with the use of a winch on a specially designed stand. Additionally, two steel ropes were lowered to guide and stabilize the system passage in the shaft. The mapping was performed twice in two positions of the platform (180 degrees rotation in the second position). Because of the ventilation function of the mine shaft, there was a big air flow inside. So, during the mapping, the fan was turned off when the system "passed" through the inlet of the ventilation pipe under the surface to obtain the stability of the platform in the shaft. Nearly 600 GB of laser data was recorded. Video recording of the shaft image with the use of omnidirectional cameras was also made.
8. Summary
This paper provides a data set collected with underground shaft mobile mapping system equipped with rotated Velodyne VLP-16, Velodyne Ultra Puck VLP-32c, Livox Tele-15, IMU Xsens MTi-30. The ground truth data was acquired with geodetic survey (15 ground control points and 6 Faro Focus 3D Terrestrial Laser Scanner stations of total 273,784,932 of 3D measurement points). We hope this work improve further mobile mapping system benchmarks without the need of performing such dangerous surveys in hazardous environments such as underground mining shaft where only specialists with certain permissions can work. We believe that our work can improve human safety due to incorporating remotely controlled mobile mapping robots for dangerous tasks. The project is released and maintained at https://michalpelka.github.io/mine-mapping-dataset/.
Author Contributions
Conceptualization, Artur Adamek and Janusz Będkowski; methodology, Artur Adamek and Janusz Będkowski; software, Janusz Będkowski and Michał Pełka; validation, All; formal analysis, Artur Adamek and Janusz Będkowski and Paweł Kamiński and Rafał Pasek; investigation, Artur Adamek; resources, All; data curation, Artur Adamek; writing—original draft preparation, All; writing—review and editing,Janusz Będkowski and Michał Pełka; visualization, Michał Pełka; supervision, Janusz Będkowski; project administration, Artur Adamek; funding acquisition, Artur Adamek. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The project is released and maintained at https://michalpelka.github.io/mine-mapping-dataset/
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| TLS | Terrestrial Laser Scanner |
| IMU | Inertial Measurement Unit |
| LiDAR | Light Detection and Ranging |
References
- Adamek A and Będkowski J (2021). Automated Mobile System for Mapping Mine Shafts. Available at https://www.gim-international.com/content/article/automated-mobile-system-for-mapping-mine-shafts (Accessed 3 June 2023).
- Bai C, Xiao T, Chen Y, et al. (2022) Faster-LIO: Lightweight Tightly Coupled Lidar-Inertial Odometry Using Parallel Sparse Incremental Voxels. In IEEE Robotics and Automation Letters 7(2):4861-4868. [CrossRef]
- Dong Z, Liang F, Yang B, et al. (2020) Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark. In: ISPRS Journal of Photogrammetry and Remote Sensing 163: 327-342. [CrossRef]
- Leung K, Lühr D, Houshiar H, Inostroza F, et al. (2017) Chilean underground mine dataset. In: The International Journal of Robotics Research 36(1): 16-23. [CrossRef]
- Jeong J, Cho Y, Shin Y-S, et al. (2019) Complex urban dataset with multi-level sensors from highly diverse urban environments. In: The International Journal of Robotics Research. 38(6): 642-657. [CrossRef]
- MaddernW, Pascoe G, Linegar C, et al. (2017) 1 year, 1000 km: The Oxford RobotCar dataset. The International Journal of Robotics Research. 36(1): 3-15. [CrossRef]
- Pełka M (2023) Mine Mapping Dataset. Available at: https://github.com/michalpelka/mine-mapping-dataset#extrinisic-calibration—experimental (Accessed 3 June 2023).
- Zlot R, Bosse M (2014) Efficient Large-scale Three-dimensional Mobile Mapping for Underground Mines. Journal of Field Robotics 31: 758–779.
- Zlot R (2014) Efficient and Versatile 3D Laser Mapping for Challenging Environments. In ICPRAM 2014 - Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods, Loire Valley, France, 6-8 March, ESEO, Angers.
- Będkowski J and Pełka M (2023) Affordable Robotic Mobile Mapping System Based on Lidar with Additional Rotating Planar Reflector. In Sensors 23(3):1551. [CrossRef]
- Liu Z, Zhang F, Hong X (2022) Low-Cost Retina-Like Robotic Lidars Based on Incommensurable Scanning. In IEEE/ASME Transactions on Mechatronics 27(1):58-68.
Figure 1.
Top: the mobile mapping system suspended on the cable over the shaft, bottom: Coordinates frames for each sensor. 1 - Livox TELE-15, 2 - rotated VLP-16, 3 - tilted VLP-32c.
Figure 1.
Top: the mobile mapping system suspended on the cable over the shaft, bottom: Coordinates frames for each sensor. 1 - Livox TELE-15, 2 - rotated VLP-16, 3 - tilted VLP-32c.
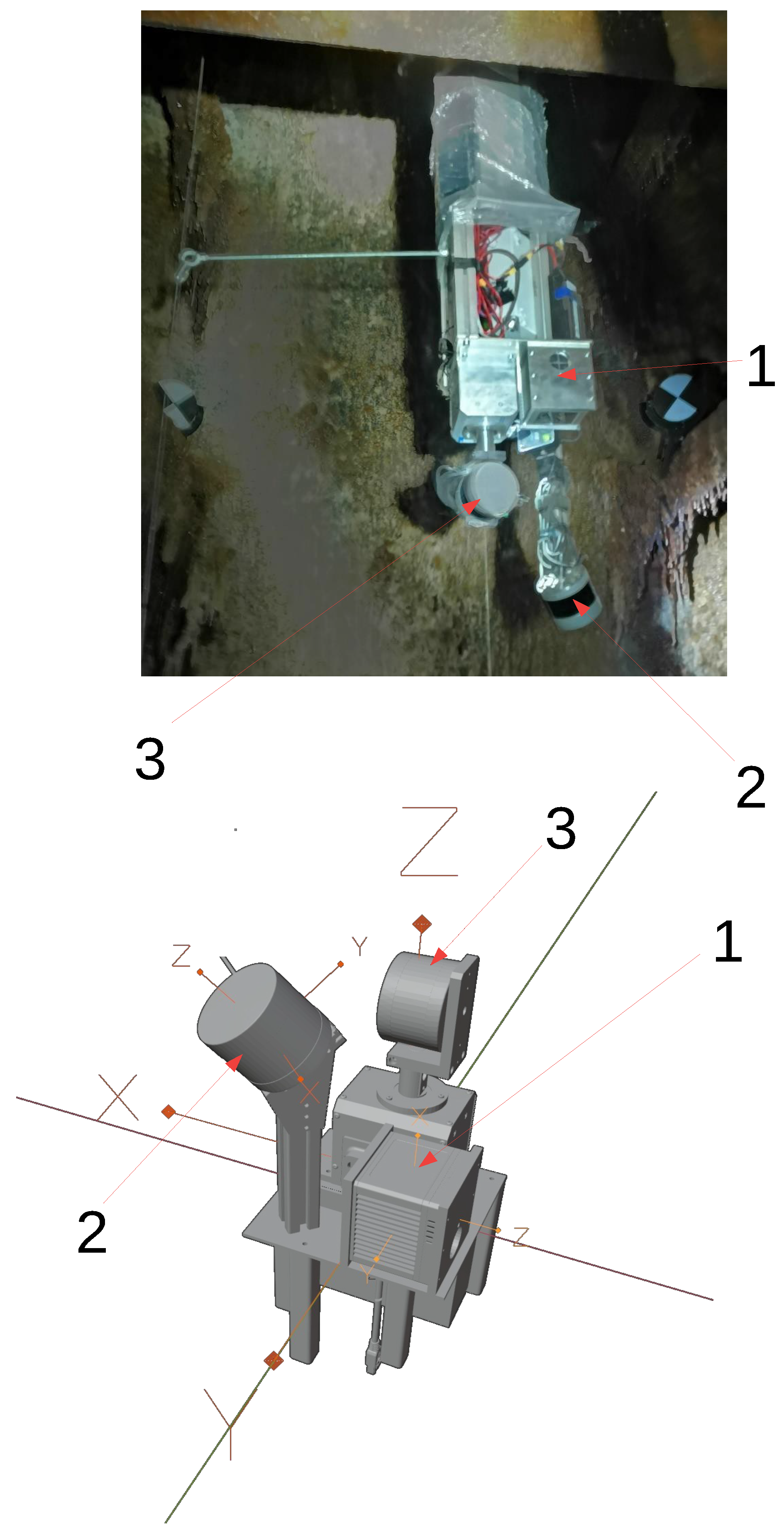
Figure 2.
Geodetic measurements with Leica TS11.

Figure 3.
TLS (Terrestrial Laser Scanning) in the shaft with Faro Focus 3D.
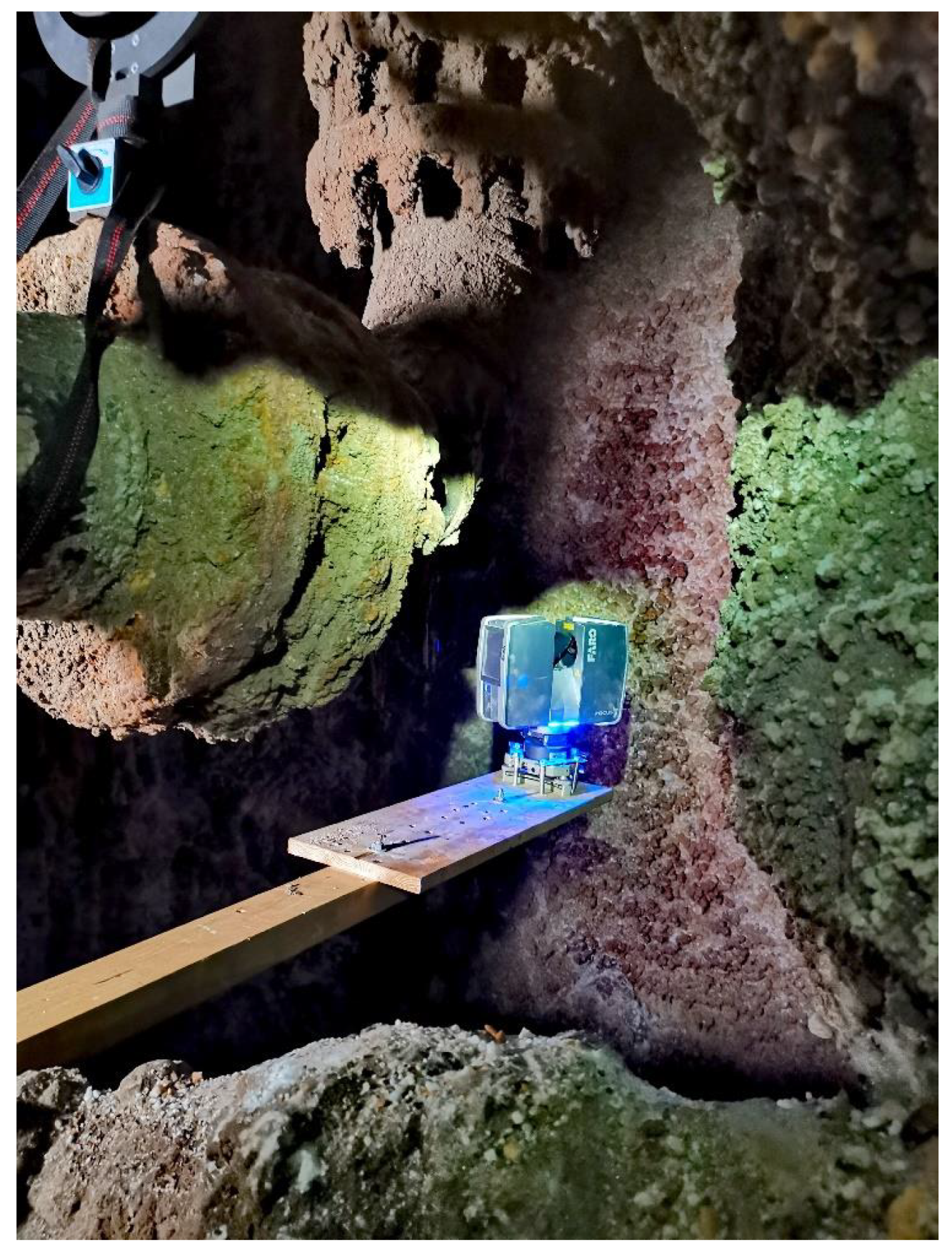
Figure 4.
Cross section of the shaft with levels marked.
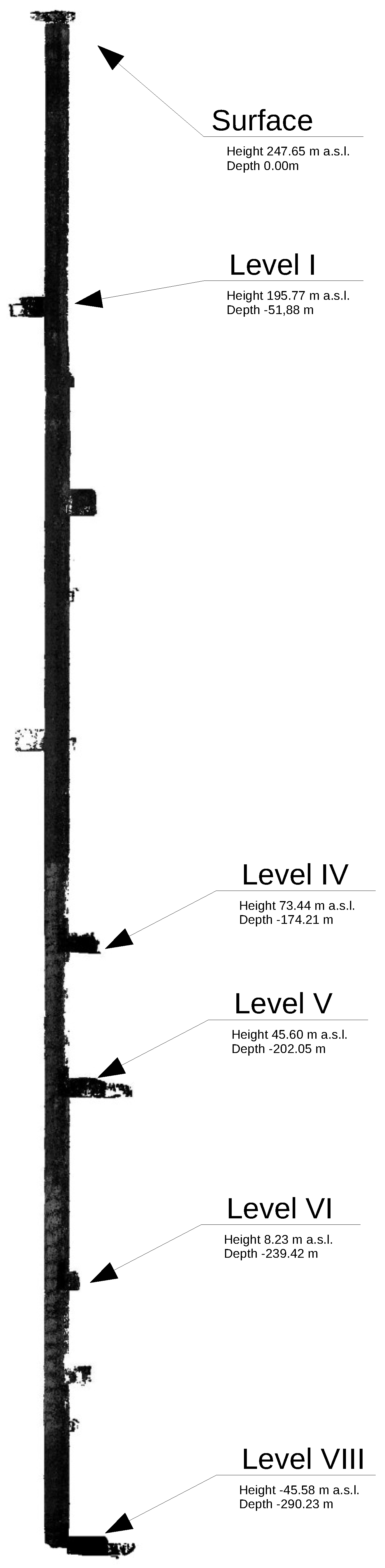
Figure 5.
Mobile mapping data of the salt crystals underground mining shaft.
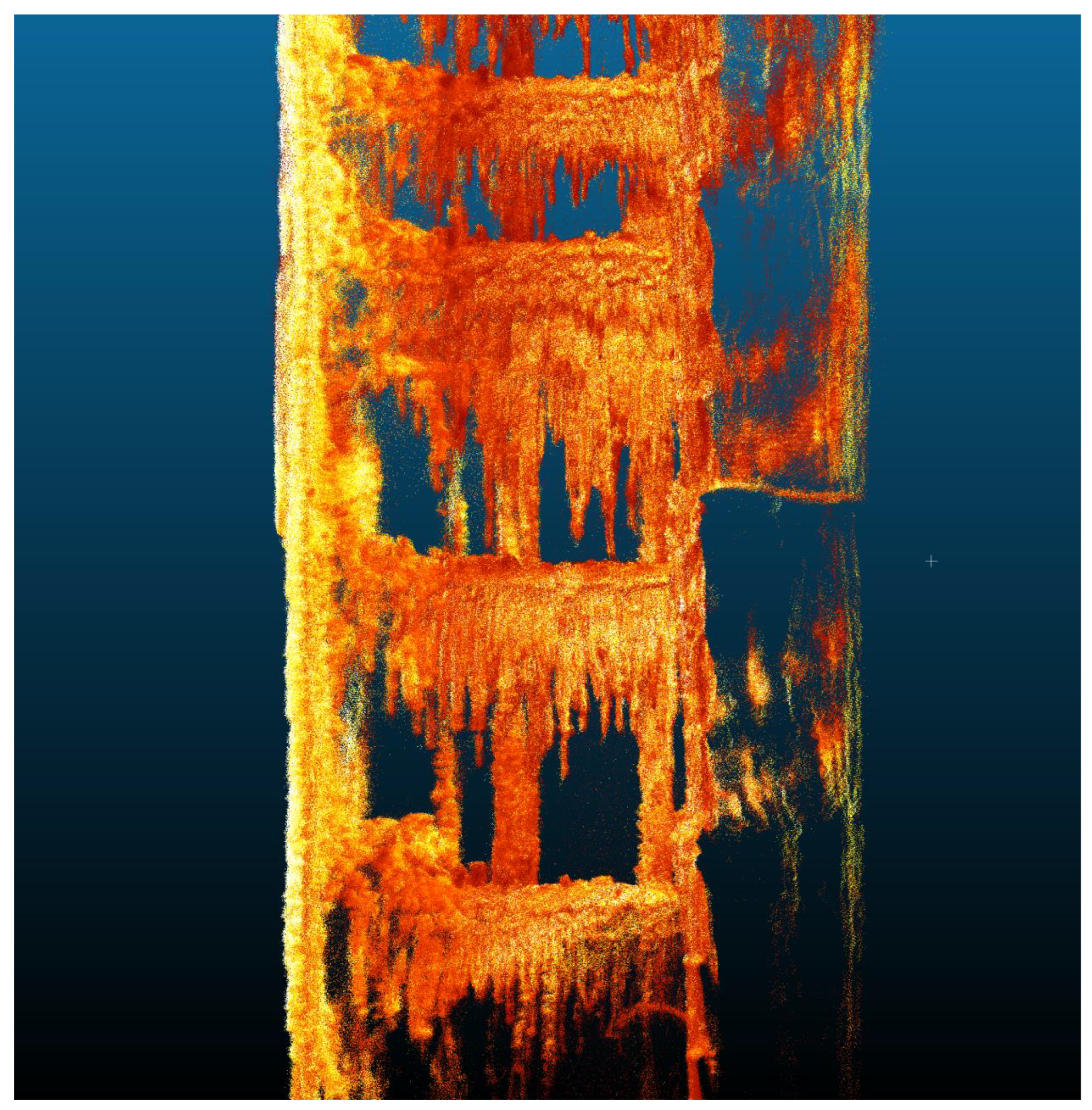
Figure 6.
Ground truth terrestrial laser scan from the bottom of the shaft.
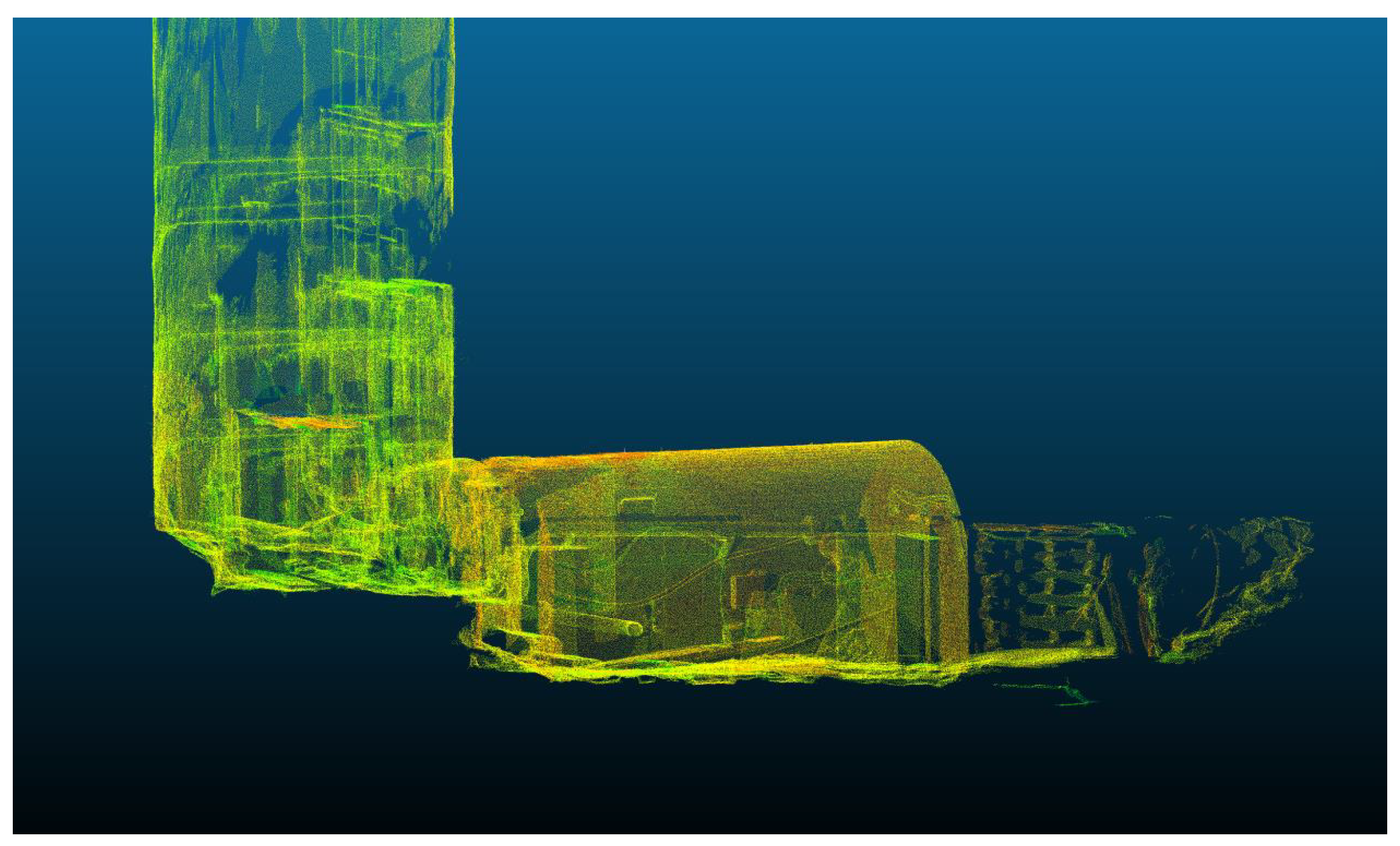
Figure 7.
Pointing to the underground control point - showing the factors affecting on the accuracy of determining the coordinates of ground control points.
Figure 7.
Pointing to the underground control point - showing the factors affecting on the accuracy of determining the coordinates of ground control points.
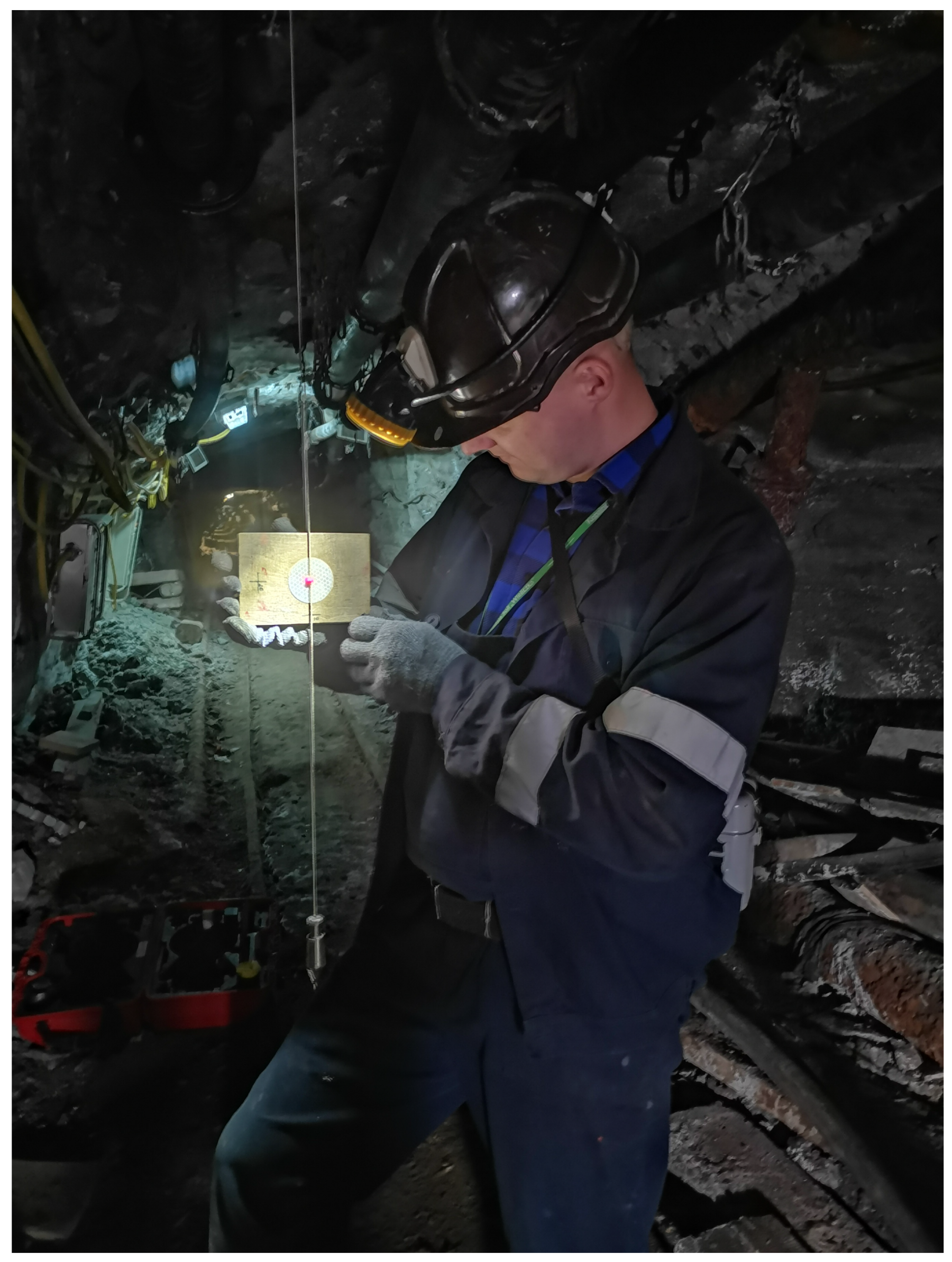
Figure 8.
Targets set up at the underground level to perform geodetic surveys and georeference.
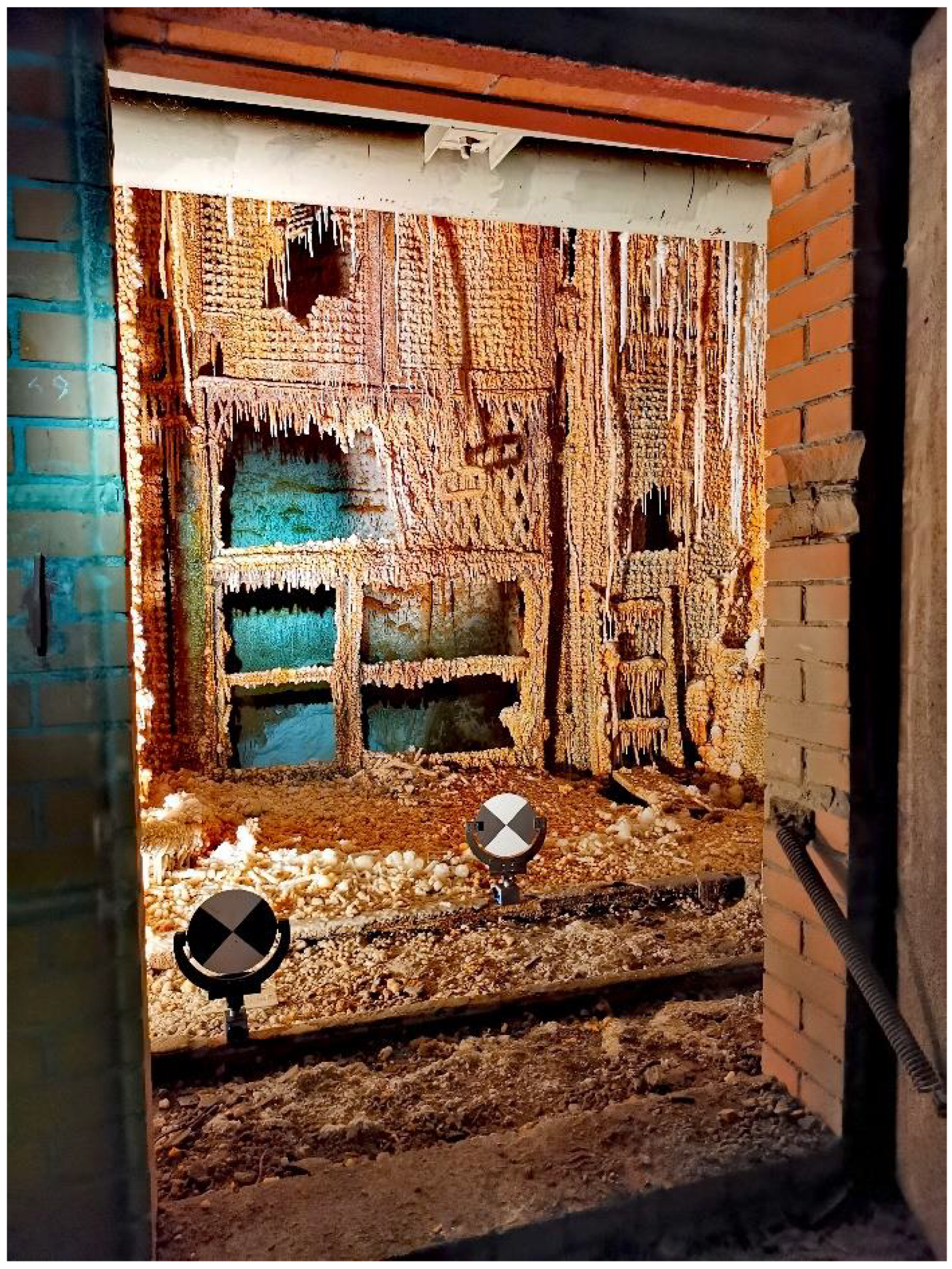
Figure 9.
The perspective views of the point clouds with 15 ground control points and 6 Faro Focus 3D Terrestrial Laser Scanner stations. The intersection of orthogonal black lines marks the position of the control point as the center of the target plane commonly used in Terrestrial Laser Mapping.
Figure 9.
The perspective views of the point clouds with 15 ground control points and 6 Faro Focus 3D Terrestrial Laser Scanner stations. The intersection of orthogonal black lines marks the position of the control point as the center of the target plane commonly used in Terrestrial Laser Mapping.
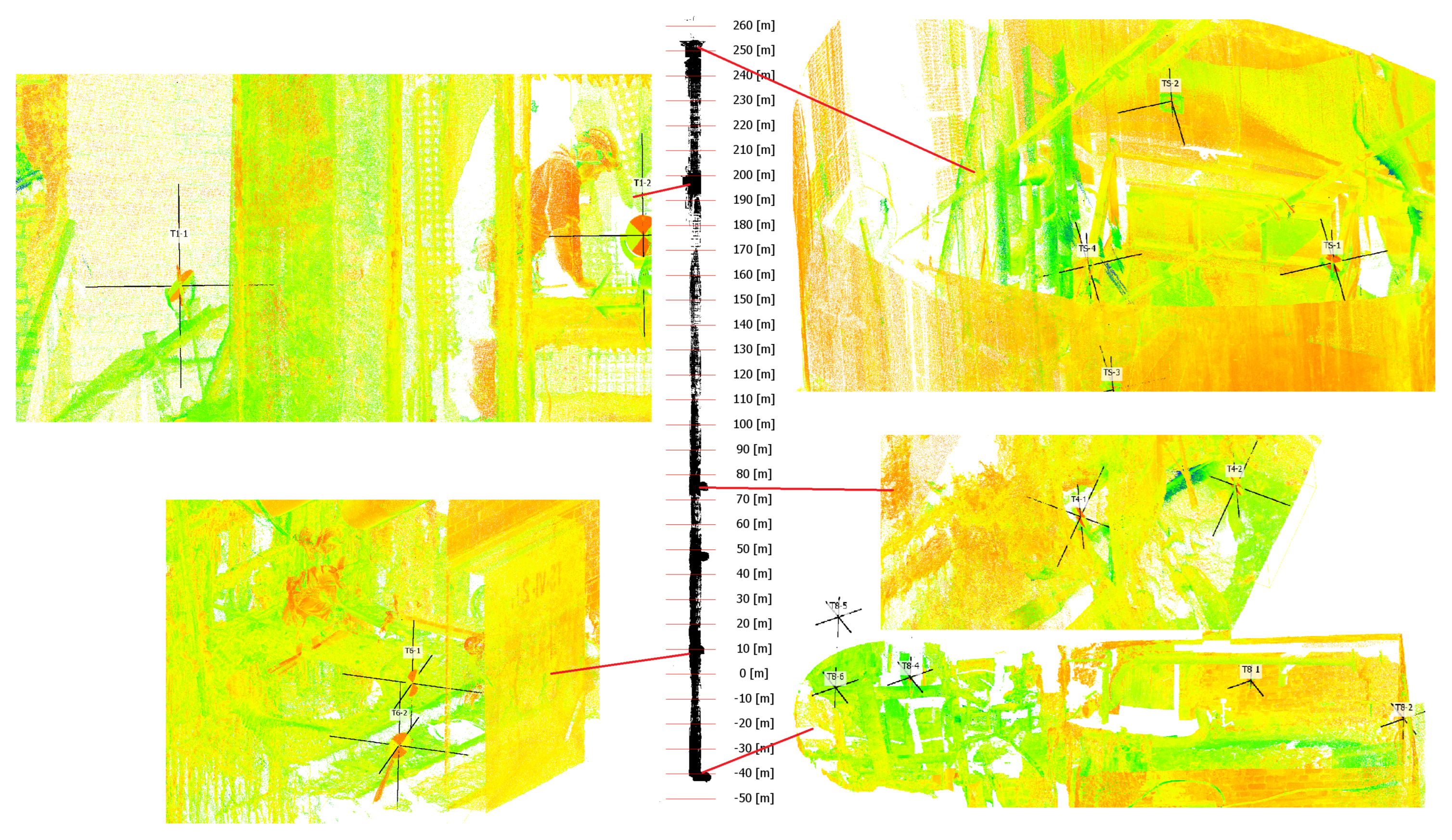
Figure 10.
Target seen on the point cloud from mobile mapping system.
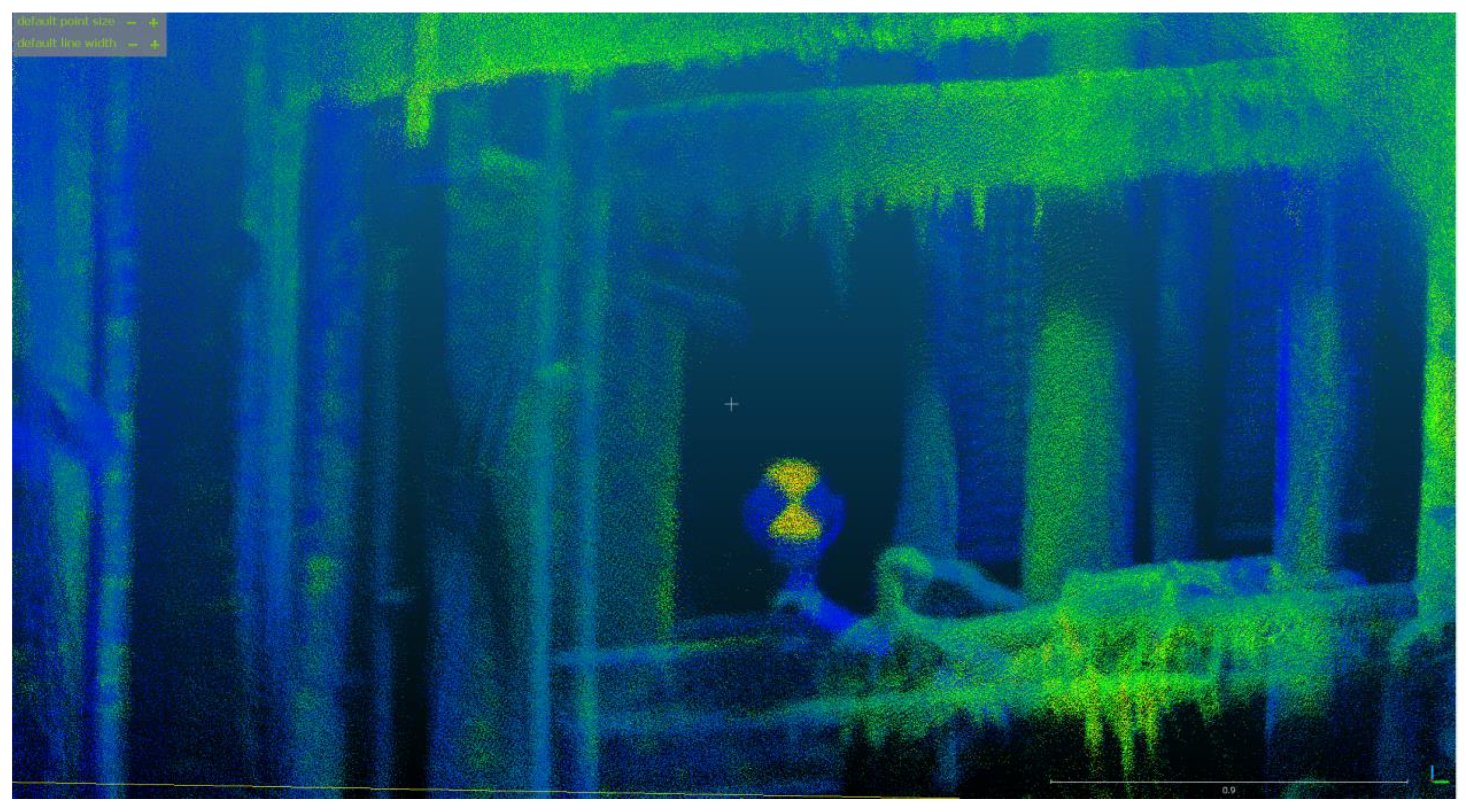
Figure 11.
Horizontal cross-section of shaft. Red - Livox TELE-15, Blue VLP-16, Green VLP-32c. Black - FARO Focus 3D.
Figure 11.
Horizontal cross-section of shaft. Red - Livox TELE-15, Blue VLP-16, Green VLP-32c. Black - FARO Focus 3D.

Figure 12.
Histogram showing distribution of distances between mobile mapping system (Livox TELE-15, VLP-16 and VLP-32c) and FARO Focus 3D. Marked 90th percentyl of distribution.
Figure 12.
Histogram showing distribution of distances between mobile mapping system (Livox TELE-15, VLP-16 and VLP-32c) and FARO Focus 3D. Marked 90th percentyl of distribution.
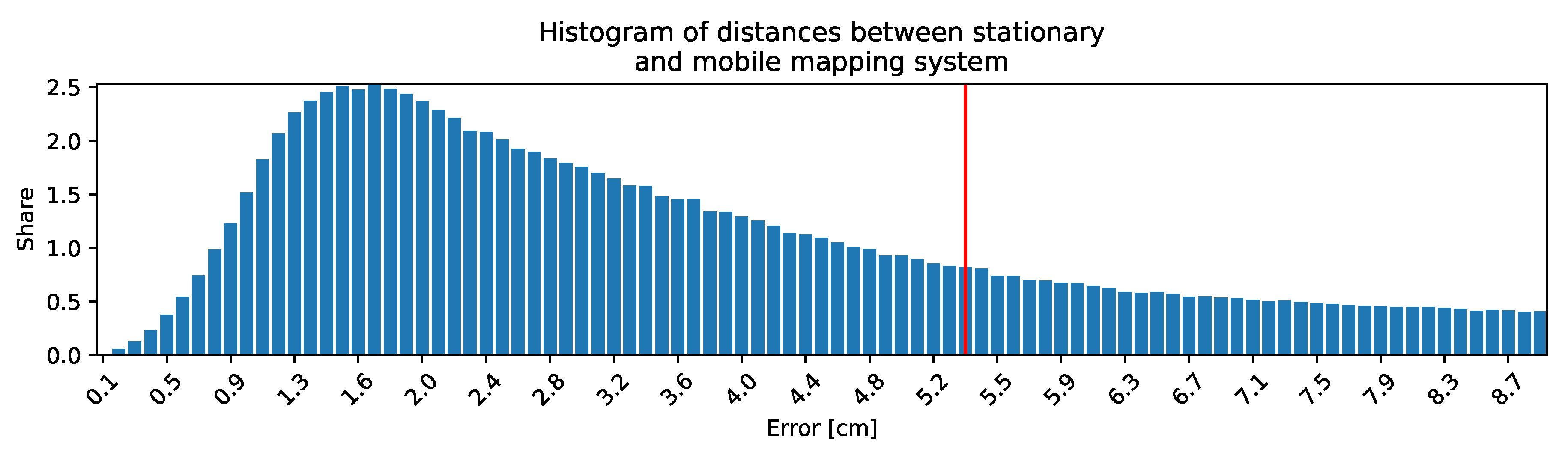
Figure 13.
Vertical cross section: color represents the LiDAR in mobile system ( Red - Livox TELE-15, Blue VLP-16, Green VLP-32c, Black - FARO Focus 3D)
Figure 13.
Vertical cross section: color represents the LiDAR in mobile system ( Red - Livox TELE-15, Blue VLP-16, Green VLP-32c, Black - FARO Focus 3D)
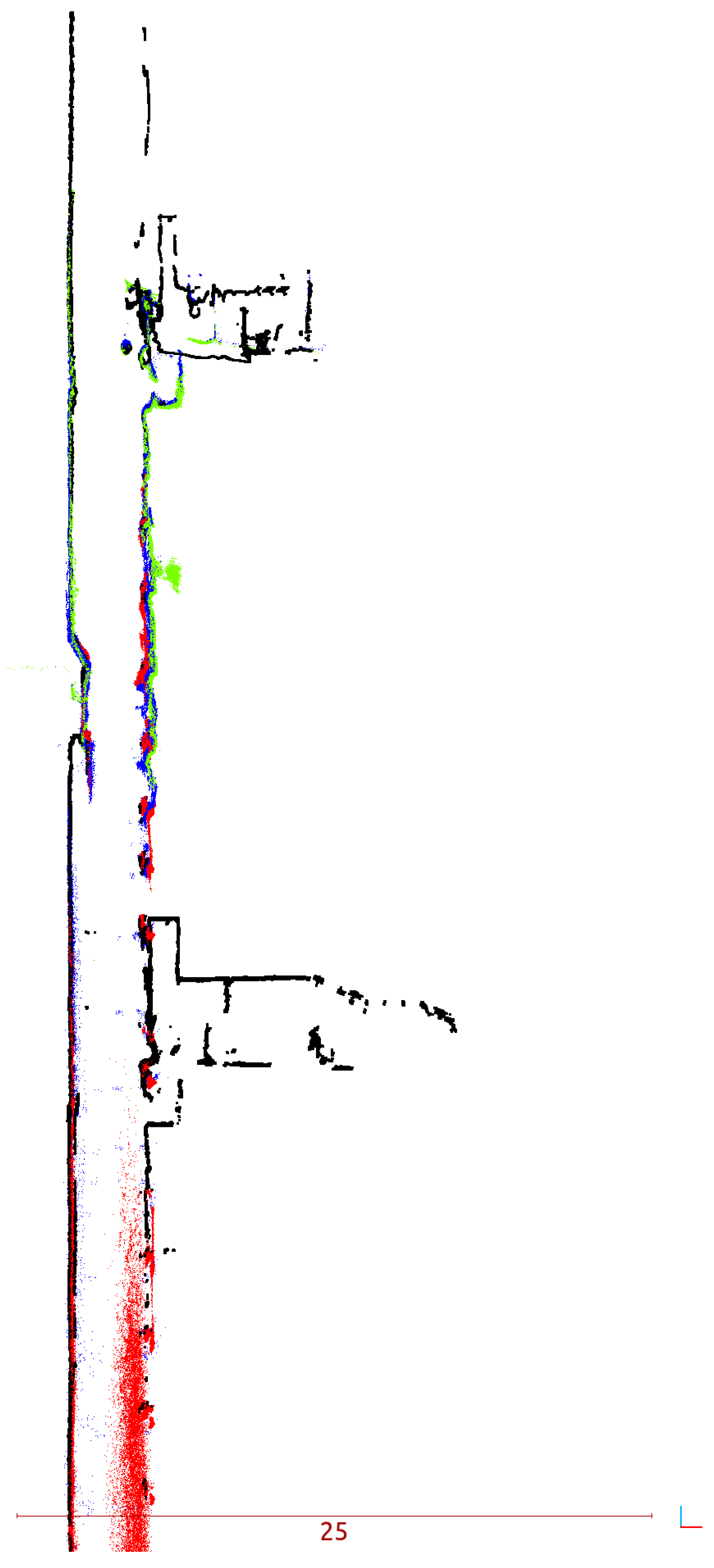
Figure 14.
Vertical cross section: distances to ground truth.
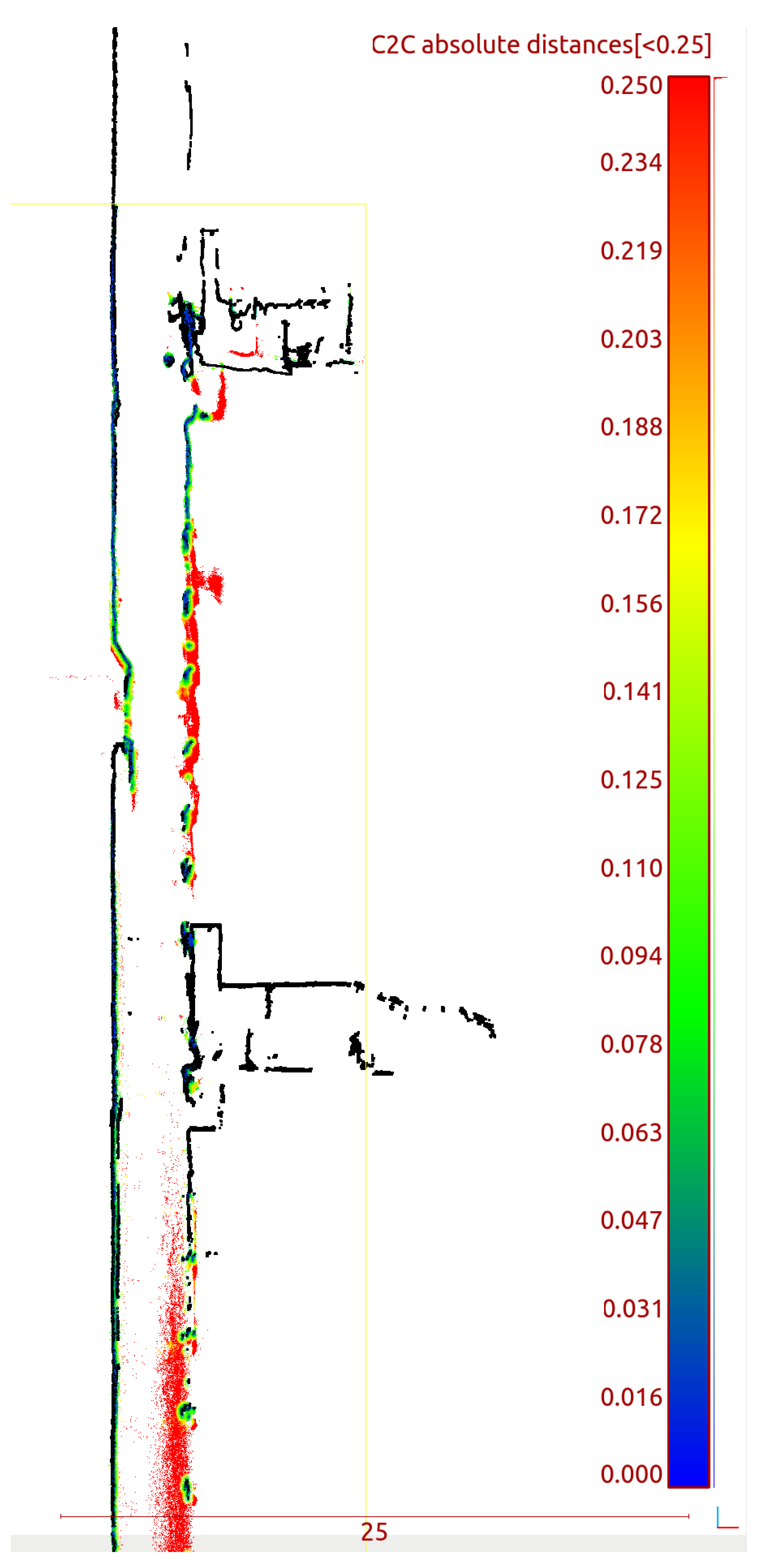

Table 1.
The coordinate frames for each sensor of mobile mapping system.
| Sensor | Extrinsic calibration |
|---|---|
| Livox Tele-15 | |
| VLP-32c | |
| VLP-16 rotation base | |
| IMU |
Table 2.
Basic parameters of sensors of mobile mapping system.
| Sensor | Basic information |
|---|---|
| Livox TELE-15 | Range: up to 500m |
| Range Precision: up to 2 cm | |
| Laser Wavelength: 905 nm | |
| Laser Safety: Class 1 | |
| Number of lasers (channels): 1 | |
| Scanning pattern: non repetitive | |
| documentation | https://www.livoxtech.com |
| /tele-15/specs | |
| Velodyne VLP-16 | Range: up to 100m |
| Range Precision: up to 3 cm | |
| Laser Wavelength: 903 nm | |
| Laser Safety: Class 1 | |
| Number of lasers (channels): 16 | |
| Scanning pattern: repetitive | |
| documentation | https://velodynelidar.com/ |
| products/puck/ | |
| Velodyne VLP-32c | Range: up to 200m |
| Range Precision: up to 3 cm | |
| Laser Wavelength: 903 nm | |
| Laser Safety: Class 1 | |
| Number of lasers (channels): 32 | |
| Scanning pattern: repetitive | |
| documentation | https://velodynelidar.com/ |
| products/ultra-puck/ | |
| Xsens MTi-30 | Angular resolution 0.05 deg |
| Repeatability: 0.2 deg | |
| Static accuracy(roll/pitch): 0.5 deg | |
| Static accuracy(heading): 1 deg | |
| Dynamic accuracy: 2 deg RMS | |
| documentation | https://shop-us.xsens.com/shop/ |
| mti-10-series/mti-30-ahrs/ |
Table 3.
Basic parameters of utilized TLS.
| Sensor | Basic information |
|---|---|
| FARO Focus 3D | Range on white surface: |
| up to 150 m | |
| Range on black surface: | |
| up to 50 m | |
| Range precision on white surface: | |
| up to 0.1 mm | |
| Range precision on black surface: | |
| up to 0.7 mm | |
| Angular accuracy: 19 arcsec | |
| Accuracy of 3D point at | |
| 10 meters: 2 mm | |
| Accuracy of 3D point at | |
| 25 meters: 3.5 mm | |
| Laser Wavelength: 1553.5 nm | |
| Laser Safety: Class 1 | |
| documentation | https://www.faro.com/en/Resource-Library/Brochure/FARO-Focus-Premium |
Table 4.
The coordinates of ground control points.
| Ground | x [m] | y [m] | z [m] | uncertainty |
|---|---|---|---|---|
| control | [sigma] | |||
| point id | ||||
| TS-1 | -86345.352 | 22671.020 | 249.098 | 5mm |
| TS-2 | -86346.390 | 22672.932 | 249.391 | 5mm |
| TS-3 | -86347.665 | 22669.905 | 249.503 | 5mm |
| TS-4 | -86347.457 | 22671.858 | 248.701 | 5mm |
| T1-1 | -86347.239 | 22668.482 | 196.697 | 7mm |
| T1-2 | -86347.484 | 22671.017 | 196.918 | 7mm |
| T4-1 | -86346.082 | 22672.304 | 75.892 | 10mm |
| T4-2 | -86345.222 | 22673.541 | 74.974 | 10mm |
| T6-1 | -86345.387 | 22673.960 | 8.564 | 14mm |
| T6-2 | -86344.347 | 22674.161 | 8.564 | 14mm |
| T8-1 | -86345.550 | 22678.609 | -41.371 | 20mm |
| T8-2 | -86343.015 | 22680.587 | -41.152 | 20mm |
| T8-4 | -86347.258 | 22671.981 | -40.004 | 20mm |
| T8-5 | -86347.847 | 22670.668 | -38.436 | 20mm |
| T8-6 | -86346.088 | 22669.629 | -38.438 | 20mm |
Table 5.
Number of measurement points for each stationary scan and elevation ranges.
| Stationary | number of | elevation | elevation |
|---|---|---|---|
| scan | 3D points | min [m] | max [m] |
| Surface | 48,494,798 | 192,57 | 254,2 |
| Level 1 | 48,116,790 | 178,72 | 254,18 |
| Level 4 | 24,305,044 | 38,66 | 112,31 |
| Level 5 | 40,505,015 | -4,62 | 112,28 |
| Level 6 | 63,493,077 | -41,26 | 58,65 |
| Level 8 | 48,870,208 | -43,37 | -7,39 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



