
Submitted:
23 October 2023
Posted:
24 October 2023
You are already at the latest version
Abstract
China is rich in coal resources, but the complex hydrogeological conditions lead to difficulties in coal mining, such as coal mine collapse, roof and water damage, and other accidents that occur frequently, resulting in many casualties and property losses. The use of coal mine hole detection technology to detect and analyze the internal environment of the coal mine in advance helps to reduce safety hazards and prevent coal mine accidents, for the existing coal mine hole detection technology operation is cumbersome, not easy to control, and insufficient depth of jacking prob-lems, this paper designs a new type of mine hole detection small robot. Firstly, this paper ana-lyzes the function and structural design of the mine hole detection robot, designs the variable diameter function according to the characteristics of narrow and uneven mine holes in coal mines, and analyzes the mechanics of the critical parts through theoretical calculations; secondly, based on the three-dimensional modeling software, established the structural model of the small robot for mine hole detection; after that, designed the robot's hardware circuits and control pro-grams for the presence of water and gas inside the mine hole, highlighting the need to carry out a new type of mine hole detection small robot. After that, we designed the robot's hardware circuit and control program, giving particular emphasis to the safety design of the circuit for the pres-ence of water and gas inside the mine hole of the coal mine. Finally, to verify the feasibility of the design program, the basic parameters and function tests of the mine hole detection small robot are carried out. The experimental results show that the mine hole inspection small robot realized by this design can adapt to the working hole diameter from 65 mm to 100 mm, the maximum working power is only 12 W, and the maximum crawling speed is 3.96 m/min. The maximum crawling slope reaches 90°, which can meet the actual mine hole inspection needs. The research can provide theoretical and design guidance for developing the mine hole detection robot with substantial engineering practical reference value.
Keywords:
hole detection
; robot
; structural design
; diameter varying technology
; safety design
1. Introduction
Coal is a vital fossil energy source and the foundation of China's energy system. China is rich in coal resources, but the complex geological conditions of coal mines and the difficulties in mining have led to frequent coal mine production accidents in China, and there is a significant gap in the safety situation of coal mines compared with that of developed countries [1,2,3,4,5,6]. According to relevant statistics, between 2008 and 2021, the total number of coal mine accidents in China reached 1,157, causing a large number of casualties and property losses, of which roof accidents and water damage accounted for 44.43%, resulting in 514 deaths, which is a severe hazard [7,8]. Coal mine roof accidents and water damage accidents. The local hydrogeological conditions are closely related, the use of mine hole detection technology can detect the stratigraphic conditions of the coal mine, effectively reducing the risk of coal mining; the existing mine hole detection technology uses artificial push rod jacking probe to photograph the internal environment of the mine hole, the operation of this method is cumbersome, the jacking depth is insufficient, the speed is not easy to regulate, and the imaging effect is poor. Therefore, the development of a small mobile robot integrating various detection functions is of great engineering significance for safeguarding the safe production of the mineral industry.
The mine hole inspection small robot primarily focuses on inspecting small and medium-sized holes in coal mines, which falls under the category of pipeline robots. Pipeline robots represent electromechanical integrated systems capable of navigating through and operating inside or outside boreholes. Pipelines constitute critical components of modern industrial transportation, necessitating regular inspections as a crucial safety measure. Scholars worldwide have designed various pipeline inspection robots catering to different pipeline structures and usage environments, laying the foundation for developing mine borehole inspection robots [9,10,11,12]. Different driving methods divide pipeline robots into two categories: external load-driven and self-driven.
External load-driven robots mainly refer to PIGs, which are now widely used in the oil and gas industry and are based on the principle of utilizing rubber discs that move under the pressure of fluids in the pipeline. Xiong Yi and colleagues 2019 designed a Novel Foam Smart PIG for oil and gas pipelines with good pass-through capability to detect pipeline defects while performing pipeline cleaning. However, such robots' particular power source limits their application environments to sealed pipelines filled with flowing media [13,14,15,16,17].
Self-driven pipeline robots carry a power source inside themselves and can be subdivided into snake, crawler, wheeled, etc., according to the different moving methods [18,19,20]. Serpentine pipe robots have strong crawling ability and can adapt to complex environments. Paulo Debenest designed a serpentine pipe robot named PipeTron, whose main body is divided into several parts; each part has an active wheel, adopts the way of wall-pressing walking, and the parts are connected with each other through the deflector joints, which has good crawling ability and traction ability, but its energy consumption is large and complicated to operate [21]; Mariko and colleagues improved the structure of the snake robot to travel in a rolling way, which makes the robot have good obstacle avoidance ability, but this robot has the requirement of the pipe diameter size. It can not adapt to the small caliber pipe [22,23]. Tracked pipeline robots have a large support area, slight ground-specific pressure, not easy to slip, good traction adhesion performance, and good passability. Bogadan designed a tracked pipeline robot in 2021, which innovatively used a flexible articulated permanent magnetic track to generate local adhesion force, which allowed the robot to be adsorbed to the pipe wall for movement and solved the passability problem of non-clearable pipes, but This kind of magnetic track can only work in ferromagnetic pipes, and the crawling performance in non-magnetic orifices will be significantly weakened [24]; Zhao and colleagues designed a tracked pipeline robot, with three tracks uniformly distributed on the outside of the body according to 120 degrees, and adopting an electric actuator, which can independently adjust the radius of the tracks to adapt to different sizes of the pipeline and can adjust the pressure between the tracks and the pipe wall to regulate the traction force, the pressure wall It can adjust the traction force by adjusting the pressure between the tracks and the pipe wall, and the way of pressing the wall makes it suitable for pipes made of various materials, but the tracks of the pressure-wall tracked pipeline robot cannot be retracted inside the body, which makes the space utilization rate low and difficult to miniaturize, and is not suitable for pipes under 100 mm [25]. Wheeled pipeline robots are the most widely used because of their excellent maneuverability and high efficiency. A simple wheeled pipeline robot only relies on the crawling wheel and the lower side of the pipe wall contact travel; However, the structure is simple, the traction force is insufficient, Cao designed a six-wheeled pressure wall pipeline robot; each of the two ends of the three wheels is distributed at 120 °, with the ball screw can be the two sides of the wheels can be retracted and released, to regulate the pressure between crawling wheels and the pipe wall, to be able to adapt to the diameter of the pipe from 100 mm to 200 mm, flexible and stable, but This structure is too exposed to adapt to the waterlogged environment [26,27]. Sawabe designed an articulated wheeled pipeline robot, which is flexible in its movement, strong in obstacle avoidance, and easy to miniaturize. However, its structure and control method are too complex, and its performance is unstable [28].
In summary, although the pipeline robot technology has matured, the existing pipeline robots are often for specific environments, and simple modifications can not be adapted to new environments. 2006, in the U.S. West Virginia Pressure Coal Mine Rescue Operation, the rescuers used conventional rescue robots to enter the underground to detect the robot, but the robot could not continue to move forward in the wells stuck in the mire; in 2010, the New Zealand island west of the Atyrau Pike River coal mine gas explosion accident, the rescuers attempted to detect the underground situation with a simple spark-proof modification to the pipeline robot. However, the robot short-circuited underground due to waterproofing problems. Therefore, pipeline robots in particular environments are designed according to specific conditions [29]. Coal mine boreholes have large slopes, small and uneven borehole diameters, slippery boreholes, flammable and explosive gas gases, and harsh environments at the coal mining site. The operation of robots needs to be simple and fast, and only some robots can meet the needs of coal mine borehole detection.
Based on the unique environment of a coal mine, a small wheeled robot is proposed in this paper. Firstly, the functional analysis and structural design of the robot are carried out according to the engineering requirements, the key components are mechanically modeled, and their specific structural parameters are calculated; secondly, the three-dimensional model is constructed, and the design of hardware circuit and control program is carried out; finally, the actual test is carried out, and the basic parameters of the robot and the crawling ability are tested. After testing, the mine hole inspection small robot designed in this paper has a minimum body diameter of only 65mm, with a variable diameter function, which can adapt to the 65 mm to 100 mm pipe; it adopts the form of a gear drive, which ensures low power consumption while providing sufficient traction; and it has a waterproof and explosion-proof design, which can adapt to the particular environment of the coal mine holes that contain stagnant water and gas. Compared with manual propulsion, the mine hole robot can better adapt to small-diameter mine holes, and the speed is stable and adjustable; the moving distance is long, safe, and reliable, which can significantly improve the effect of mine hole detection and promote the intelligence and safety of the production of the coal mining industry.
2. Functional analysis and mechanical modeling
Mine Hole Inspection Small robots face two challenges to work properly in coal mine holes. The first challenge is designing the robot to navigate swiftly and smoothly within the mine hole; the second challenge is ensuring that the robot can maintain its mobility even when encountering steep slopes or variations in hole diameter.
For the first problem, the crawler wheel is used as the walking mechanism of the small robot for mine hole inspection, the motor's rotation is conveyed to the crawler wheel via the drive arm, providing a stable driving force for the robot; for the second problem, a new type of adjustment mechanism is designed, in which the drive arm of the robot can be extended and retracted with the cooperation of the stepper motor and the screw nut and other components, this design enables the robot to adjust the positive pressure, stabilize its body, and navigate through mine holes with significant inclines.
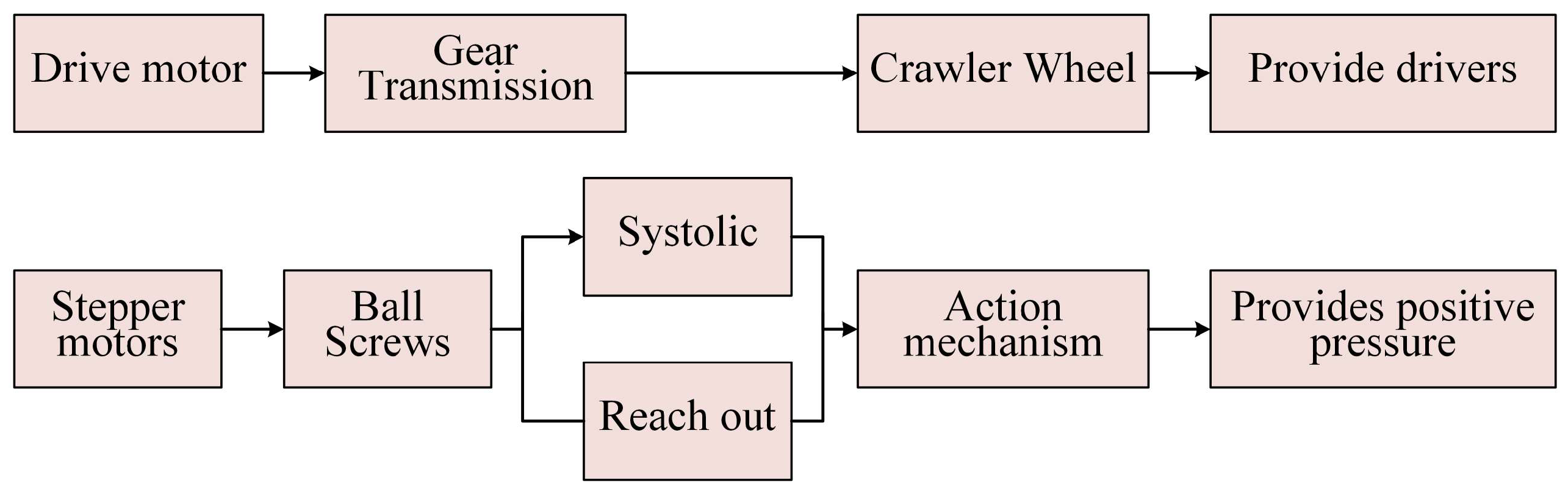
Figure 1.
Functional Analysis.
2.1. Mechanics modeling
Figure 2 shows the force analysis diagram of the crawling wheel of the small robot for mine hole detection. The rotary motion of the motor on the left is transferred to the ball screw, and the nut is driven to move back and forth through the rotation of the screw to convert the rotary motion of the motor into the linear motion of the nut. The sleeve moves back and forth with the nut, thus driving the push rod and the drive arm up and down, realizing the crawler wheel's extension and retraction, the reducer's function, and regulating the positive pressure. Exploring the relationship between the pushrod thrust and the positive pressure on the crawler wheel can help with stepper motor selection and traction evaluation.
To model the mechanics, the axial thrust provided by the sleeve actuator is determined by the spring elasticity and the fixed position of the screw nut, which is held in place by the stepper motor turning the screw nut to the proper position. The gravity of the rod is ignored in the calculations due to the light weight of the rod and the fact that only the relationship between thrust and positive pressure is discussed here.
Establish the equation based on the geometric relationship (1):
Variation on both sides of equation (1) gives equation (2):
Integrating equation (2) yields:
By the principle of imaginary work, that is, assuming an imaginary displacement, the forcemultiplied by the imaginary displacement is equal to the imaginary work, and the total imaginary work is 0.
Substituting equation (3) into equation (4),the relationship between thrust and positive pressure is obtained as follows:
Also by equation (6):
In Eq. (6), is the coefficient of friction, and substituting Eq. (5) into Eq. (6) yields the relationship between the traction force and:
2.2. Shaft strength calibration calculation
The shaft, a crucial transmission component of the robot, is tasked with supporting the rotating parts and facilitating motion and power transfer. To achieve the design goals, it's necessary to consider both the structural dimensions and the operational capacity. The precise structural dimensions of the shaft are defined by its specific mounting position and its designated function; the operational capacity of the shaft is calculated, taking into account factors like strength, stiffness, and vibration stability; typically, the operational capacity of the shaft relies primarily on its strength, particularly with regards to the conditions of torsional strength. By consulting the mechanical design manual it is known that the torsional strength of the shaft should be satisfied:
In Eq. (6), is the torsional shear stress, ; is the torque applied to the shaft,; is the torsional shear factor of the shaft,; is the speed of the shaft, ; is the transmission efficiency of the shaft,; is the diameter of the shaft at the calculated section,; is the allowable torsional shear stress,.
Limit the output power of the motor to 8, the power allocated to a single driven bevel gear is 4W, then take, the traction force required by the mine hole inspection robot is, then take , bycan be deduced that the robot's moving speed is. The crawling wheel radius is 22.5, by equation (9):
It can be deduced that the speed of the shaft is 25.5, and the shaft diameter condition can be obtained by the torsional strength condition of the shaft:
Where 45 steel is chosen as the material of the shaft, then is taken as 30 andis taken as 110. Substituting into equation (10), we can get, then the design dimension of the shaft should be 6.
Finite element simulation software can effectively verify the force of the components in the limit state. When the robot is obstructed and causes the crawler wheel to stop, the motor's output torque reaches the maximum, and at this time, the drive shaft will be subjected to a considerable load and reach the limit state.
The gear motor's maximum output torque is 8.8 Nm, and the bevel gear ratio is 1. Neglecting unfavorable factors such as friction, i.e., the maximum torque the drive shaft is subjected to is also 8.8 Nm. The post is modeled in the finite element software, the torque is added at the right end of the stick, and the constraints are fixed at the left end to simulate the case of a blocked stop of the crawler wheel.
Figure 3 shows the strain cloud on the left side and the stress cloud on the right. The analysis results show that the portion where the maximum strain and the maximum stress appear is near the end where the load is added and that the shaft holes on the bevel gears should not be oversized during subsequent machining and assembly to improve the tightness and stiffness of the mounting area and to reduce the deformation.
2.3. Analysis of the effect of regulating system on positive pressure
From Figure 2, it can be seen that a spring is used as a buffer in the adjustment system. When there is a small change in the diameter of the hole, the buffering effect of the spring can ensure a reliable contact between the wheel and the wall of the hole, as can be seen from the geometric relationship in the figure:
Differentiating equation (11), equation (12) is obtained:
Simplifying equation (12) yields:
The tension anglesandcan be determined from equation (14):
Given that the inner diameter of the mine hole changes, it is evident that the adjustment system also experiences fluctuations in spring compression during its operation, regardless of changes in the inner diameter, it is imperative to maintain a certain level of spring compression, so that the crawler wheel always contact with the hole wall and provide a certain positive pressure.
3. Mechanical structure design of small robots for mine holes
The mini-robot, designed to operate within mine holes, must maintain compact body dimensions in both diameter and length, it requires significant climbing and adaptive diameter capabilities, along with adjustable speed. Based on the design concept of adaptability, the overall structure of the mine hole inspection mini-robot is divided into power system, auxiliary system and detection system. The power system furnishes the driving force propelling the mini-robot's movement; the auxiliary system manages the positive pressure and the robot's movement status, while also interconnecting various modules to ensure operational stability; the detection system is tasked with capturing images and gathering environmental parameters within the mine hole.
3.1. Power system design
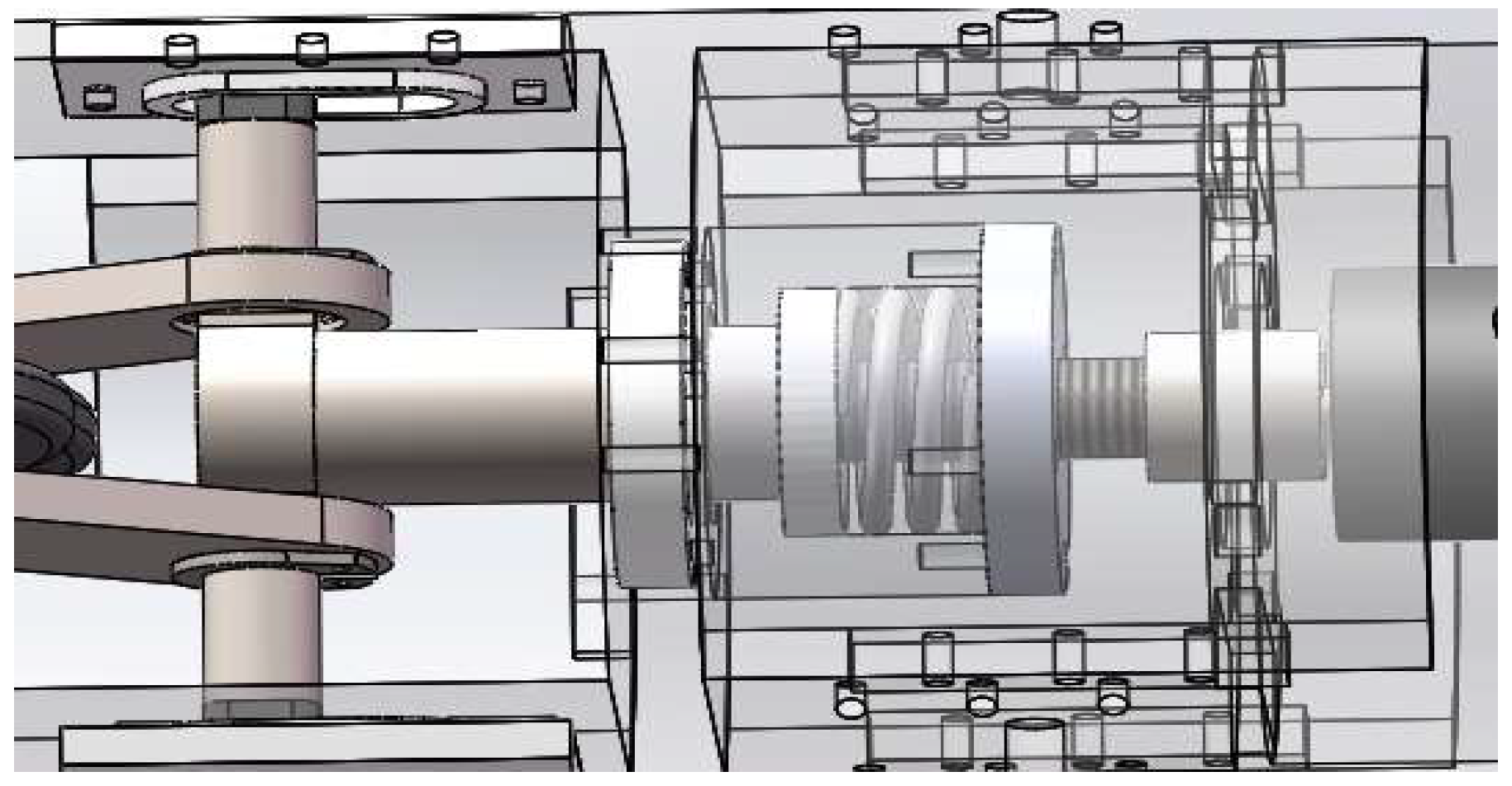
The power system is a pipeline robot's core and provides the robot's direct drive. The power system is too complex, an essential factor that causes the robot's size to increase. In order to reduce the radial size of the robot to adapt to narrow mine holes while ensuring the stability of the robot power transmission, this paper carries out a unique design of the power system, abandoning the use of motors to drive the crawler wheel directly, and adopting motors, drive shafts, and gears to cooperate to transmit power to the crawler wheel. As shown in Figure 4, The radial rotation of the motor is converted into tube rotation by bevel gears, and the bevel gears are connected coaxially with cylindrical spur gears so that the two rotate concentrically and at the same speed. The transmission arm should not only have the function of power transmission but also need to have a certain length of stretching space to meet the needs of the mine hole detection robot to change the size of the function; it is designed as a cabin, the four cylindrical spur gear transmission structure constitutes the internal structure of the extension arm, and the power is transmitted to the crawler wheel through the mesh transmission of the cylindrical spur gears. The geared motor is used to drive the two crawler wheels to work, which reduces power consumption and guarantees the safety of the robot's work.
Crawling wheel and transmission arm coaxial connection, surface knurling treatment to increase friction; crawling wheel diameter size is directly related to the working life of the bearings, the same crawling speed, crawling wheel diameter is smaller, the higher the rotational speed, the more severe wear; traveling wheel is too large, the revolution will not be able to wholly retracted inside the shell, and will lead to the rest of the structure is too compact, the careful considerations, the crawling wheel diameter is designed for 50 mm.
3.2. Auxiliary system design
The auxiliary system is capable of realizing the radius change function of the small robot for mine hole detection, holding the body upright, adjusting the travel state, connecting multiple modules, and using the screw nut structure to realize the radius change function, which can effectively control the radial size of the robot. As shown in Figure 5, the pusher is initially in a contracted state; when the robot starts to work, the stepper motor works on the action sleeve through the filament nut, and the spring in the action sleeve pushes the slider forward after accumulating force, propping up the pusher and forming a stable triangle structure with the drive arm; by controlling the forward and reverse rotation of the filament nut, the auxiliary system can also adjust the positive pressure between the crawler wheel and the pipe wall, to change the size of the friction force. The spring design of the action sleeve plays a good cushioning role. When the crawling wheel encounters a minor bump or depression, the deformation of the spring will drive the slider to slide left and right, enhancing the robot's passability.
If the pipeline inspection class robot deviates from the pipeline axis during the working process, it will not only affect the crawl performance of the robot, but also affect the quality of the shot. In order to ensure that the robot coincides with the axis of the pipe during travel, and to ensure that the robot is stable and fixed on the inner surface of the pipe, the front and rear ends of the body are supplemented with a support device as in Figure 6. The tripod structure ensures that the positive pressure on each group intersects at one point; the spring structure of each foot plays a cushioning role and is adapted to the diameter varying function of the mine hole inspection robot, so that the robot keeps the balance of the body when moving.
The design of a small robot for mine hole inspection has certain requirements on the size of the traction force, and in order to obtain a sufficiently large traction force, the friction between the crawler wheel and the hole wall needs to be increased. The friction force can be improved by increasing the friction coefficient between the crawler wheel and the hole wall and by increasing the positive pressure between the crawler wheel and the pipe wall in two ways. The first approach requires knurling the surface of the crawler wheel to increase the friction; the second approach requires the robot parts to have enough strength and stiffness to prevent the excessive positive pressure from destroying the structure of the robot, but this will result in the structure of the robot being too large to meet the size requirements of the robot. In order to increase the traction force of the robot as much as possible, the two approaches are adopted in combination; the robot is designed modularly, and multiple groups of crawling modules are connected in series to solve the problem of dimensional parameters.
The robot system is divided into crawling modules and functional modules by module, and each robot is equipped with multiple sets of crawling modules and one set of functional modules. The functional modules are used to test the environment in the coal mine borehole, and the crawling modules are used to drive the robot to move, and the crawling modules are connected to each other in series by universal joints. The universal joint, as depicted in Figure 7, has two degrees of freedom, allowing the connected modules to rotate in both horizontal and vertical planes, thereby enhancing the robot's flexibility. The required traction force determines the number of crawling module groups, with the load distributed across each group. This setup reduces the size requirement for individual modules and ensures that the mine hole inspection robot can adapt to diverse conditions, thereby broadening its utility.

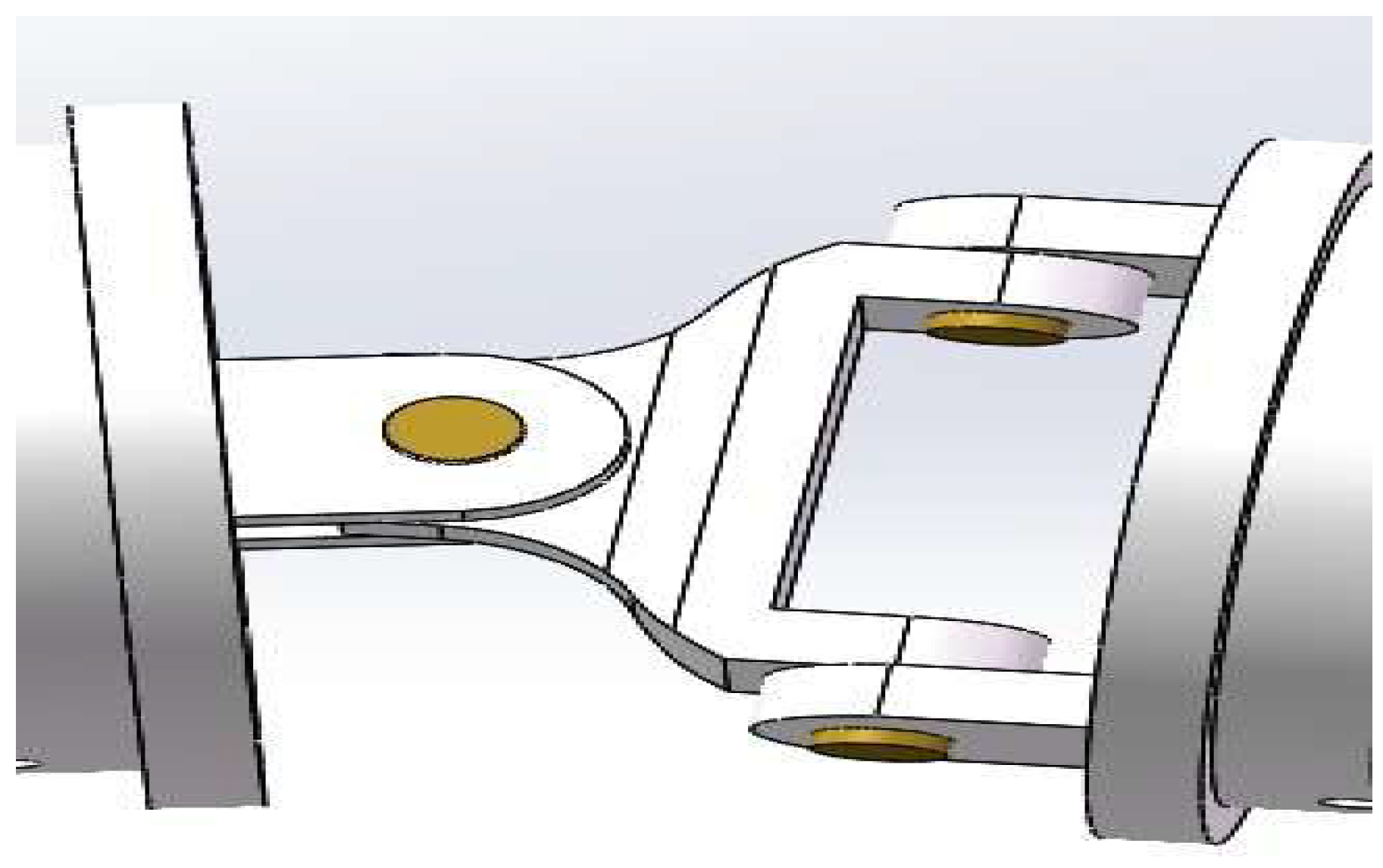
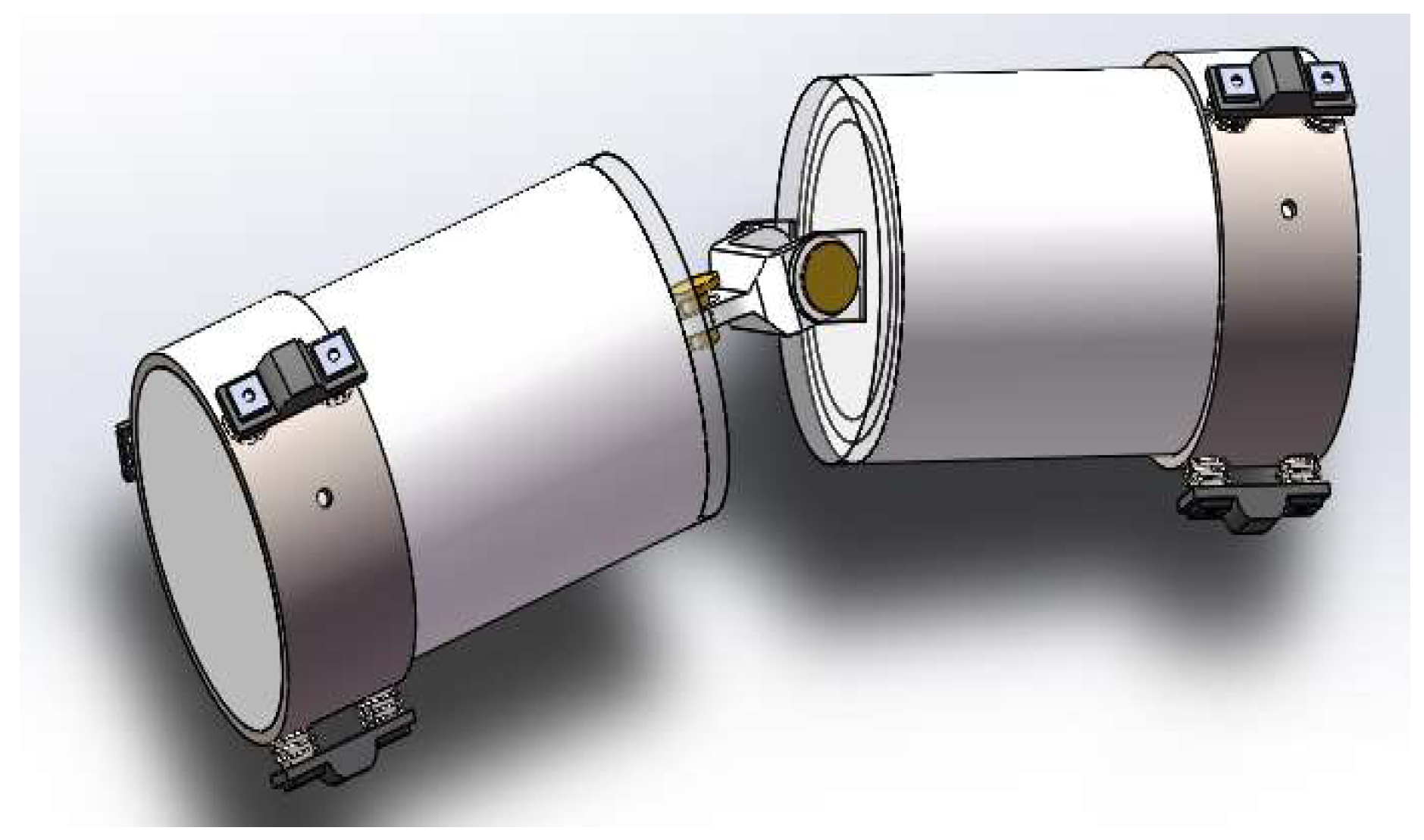
Figure 7.
Schematic diagram of the support device
Figure 8.
Universal joint
Figure 9.
Multi-module connection schematic
4. Hardware circuit and program design
4.1. Hardware circuit design
The small robot for mine hole inspection also needs to detect the environment inside the coal mine hole, mainly including methane content, temperature and humidity, mine hole depth, and stratigraphic conditions, under the condition that the motion state is controllable. The hardware circuit of the robot consists of a master control module, a motion control module, a detection module, and an image module. The main control module is composed of STM32F101R6 microcontroller, power supply circuit, crystal circuit, Micro-USB circuit, etc., which is the control core of the circuit; the motion control module is responsible for controlling the motion state of the robot; The detection module contains a methane detection sensor, a temperature and humidity sensor and an optical encoder. The sensor can detect methane concentration and temperature and humidity, and the optical encoder can record the number of motor drive revolutions, deduce the robot displacement and derive the depth of the mine hole; The image module consists of camera and LED auxiliary light source, which can take pictures of the hole wall and pass the picture to the upper computer through the main control module, which will analyze the stratigraphic condition.
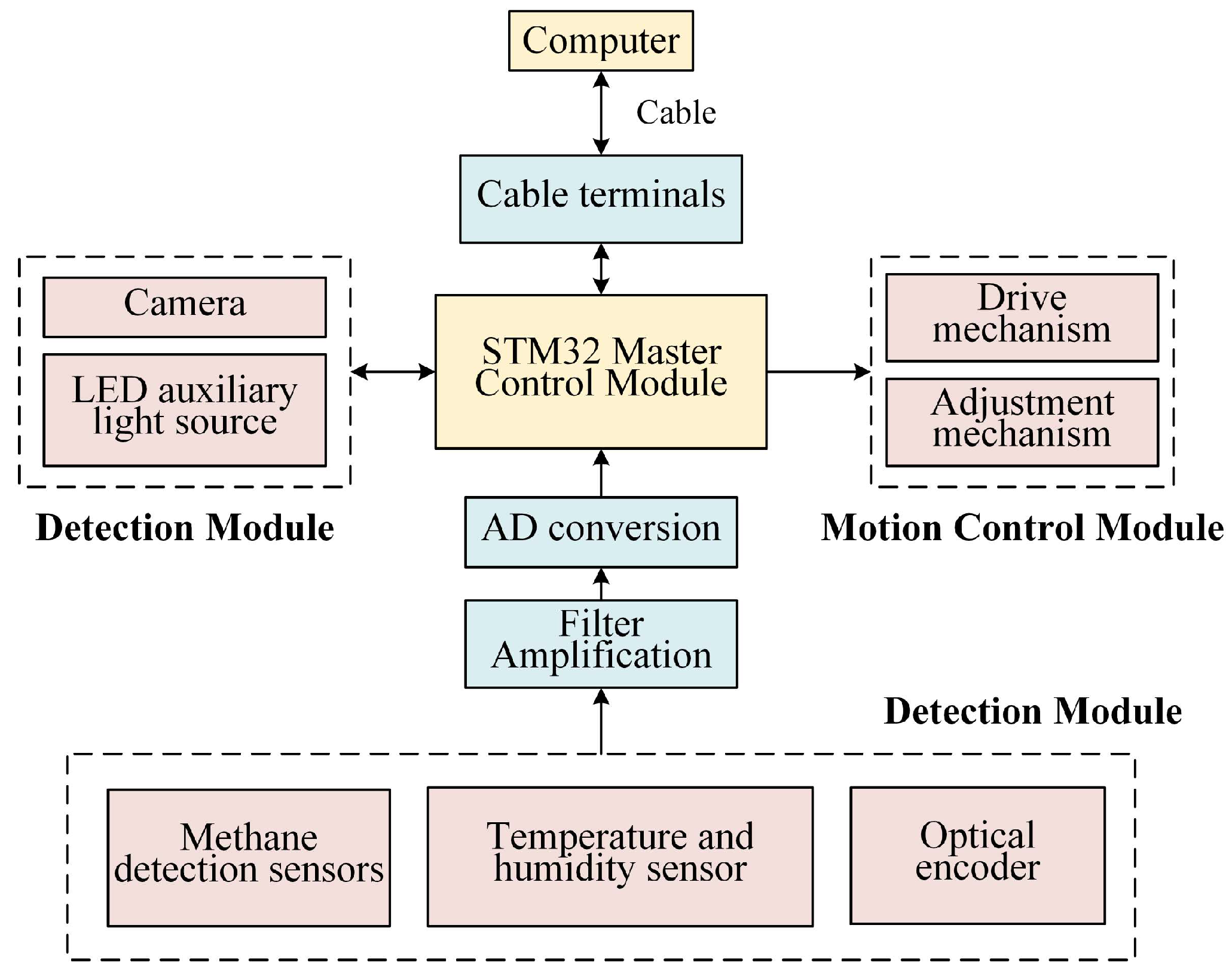
Figure 10.
Hardware circuit block diagram
For the phenomenon of the presence of gas and water inside coal mine boreholes, the circuitry of the mine borehole detection mini-robot needs to be safely designed.
In order to avoid an explosion, the robot's power must be strictly limited, and the total power should be limited to 12 W according to the requirements. The design uses a cable to power the robot, and the power consumption of the robot is mainly from the driver module, the STM32, and the light bulb. The maximum power of the selected driver module is 9.12 W, and the power of the lighting lamp is 0.5 W; the operating current of all peripherals is selected as 36mA, so the maximum power of STM32 is 0.12 W, and the total power of the robot is less than 9.74 W. Low power prevents explosions caused by sparks due to sudden changes in current, leading to glow discharges in the event of a circuit breakage fault. At the same time, the circuit is sealed and fixed to isolate the circuit from external gases, reducing the risk of explosion.
In order to avoid short-circuiting the robot due to the accumulation of water, the robot needs to be designed to be waterproof. The electrical equipment of the mine-hole detection mini robot is placed in a functional compartment for sealing and treated with sealant. The exposed equipment is waterproofed with IP68-rated products. The functional compartment inside the robot is fully sealed and treated with rubberized waterproof mats and sealant at the places where the wires pass through.
4.2. Control program design
The control program of the small robot for mine hole inspection is designed to facilitate the real-time management of the robot's operational status and to collect environmental parameters within the mine hole. The process of designing the control program can be outlined as follows: first, the communication protocol is configured, and the corresponding mapping serial port and baud rate are selected. Upon completing the configuration, commands can be dispatched and data can be received through the host computer. After receiving the instructions from the host computer, the small robot will analyze and recognize the instructions, it adjusts its motion posture and provides feedback when motion control instructions are received. Furthermore, when data query instructions are received, it transmits data—including parameters such as crawling speed, methane concentration, temperature, and humidity—to the host computer, which the host computer then utilizes for subsequent processing.
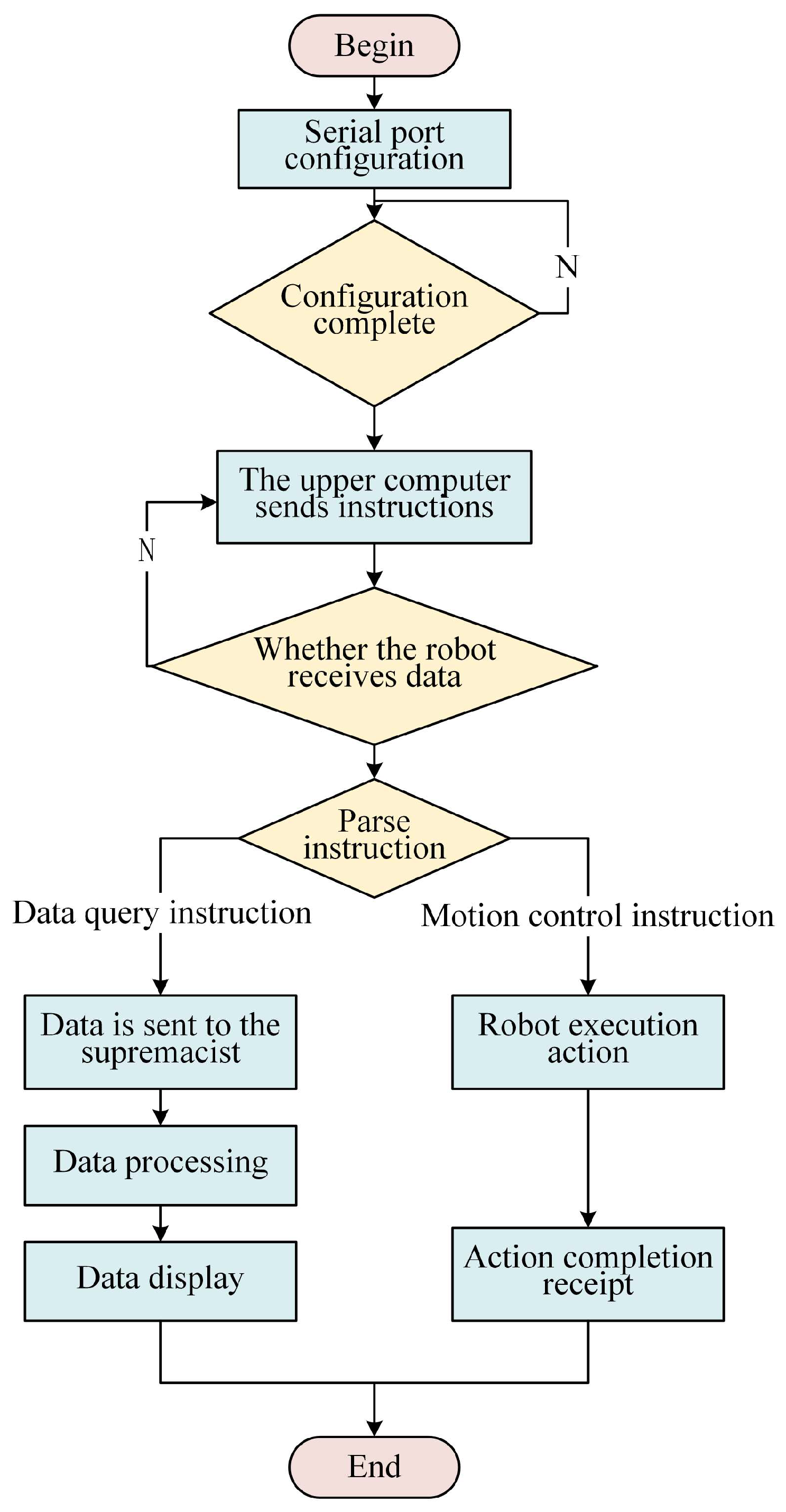
Figure 11.
Control program flow chart
5. Robot Testing and Analysis
5.1. Robot routine parameter testing
The design approach for the tiny robot used for mine hole inspection involves an initial modular design phase, followed by an assembly process. The robot needs to work in a specific environment and, therefore, has strict requirements on its specification parameters.
According to the program design requirements, the mine hole detection small robot needs to complete the work in the 70mm inner diameter of the pipe; the body size must be manageable. After measurement, the robot's drive arm completely retracted when the outer diameter of the smallest, about 65 mm, and the robot's drive arm fully extended when the outer diameter was up to 100 mm, the total length of 300mm so that the robot can be in the diameter of 65 mm to 100 mm in the regular work of the pipe. A PC pipe with an inner diameter of 70 mm is chosen as the test environment, powered by a 24V DC/0.4 A power supply, and UM242-type drivers drive the stepper motor.
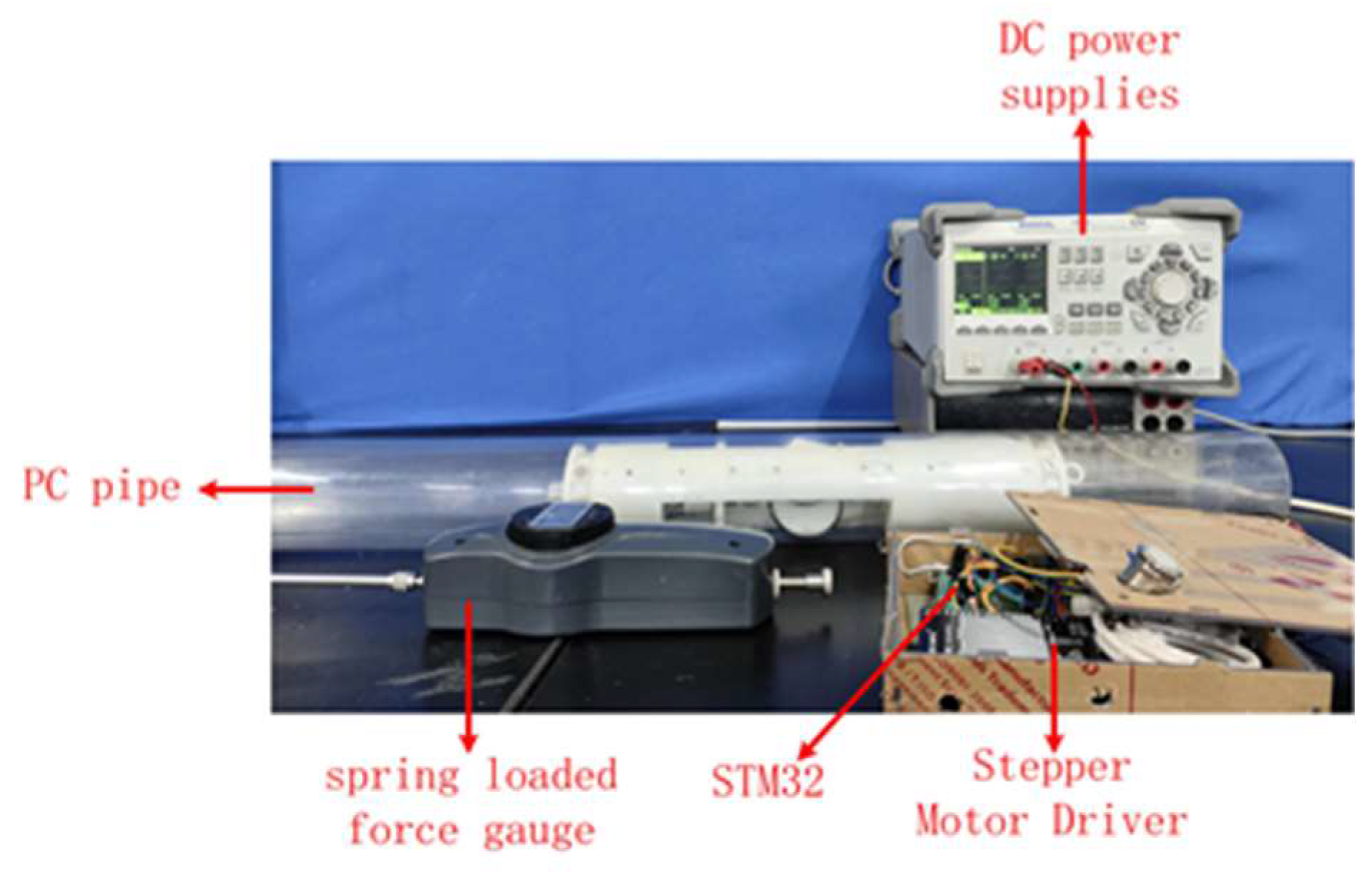
Figure 12.
Robot Integral Test System
Mine hole detection small robot adopts cable for power supply and information transmission, and it needs to have a specific traction ability to drag the cable to work. The PC pipe is fixed horizontally on the desktop. The diameter of the robot is adjusted to the appropriate size through the variable diameter function. The spring force gauge is connected to the tail of the robot. The spring force gauge is fixed horizontally when the body of the robot is entirely inside the pipe, and the crawling state is stable. The spring force gauge is fixed horizontally, and the display of the spring force gauge is the maximum traction force of the robot when the crawling wheel is stagnant or when there is obvious slipping after many measurements. The results show that the average maximum traction force of the robot can reach 40N.
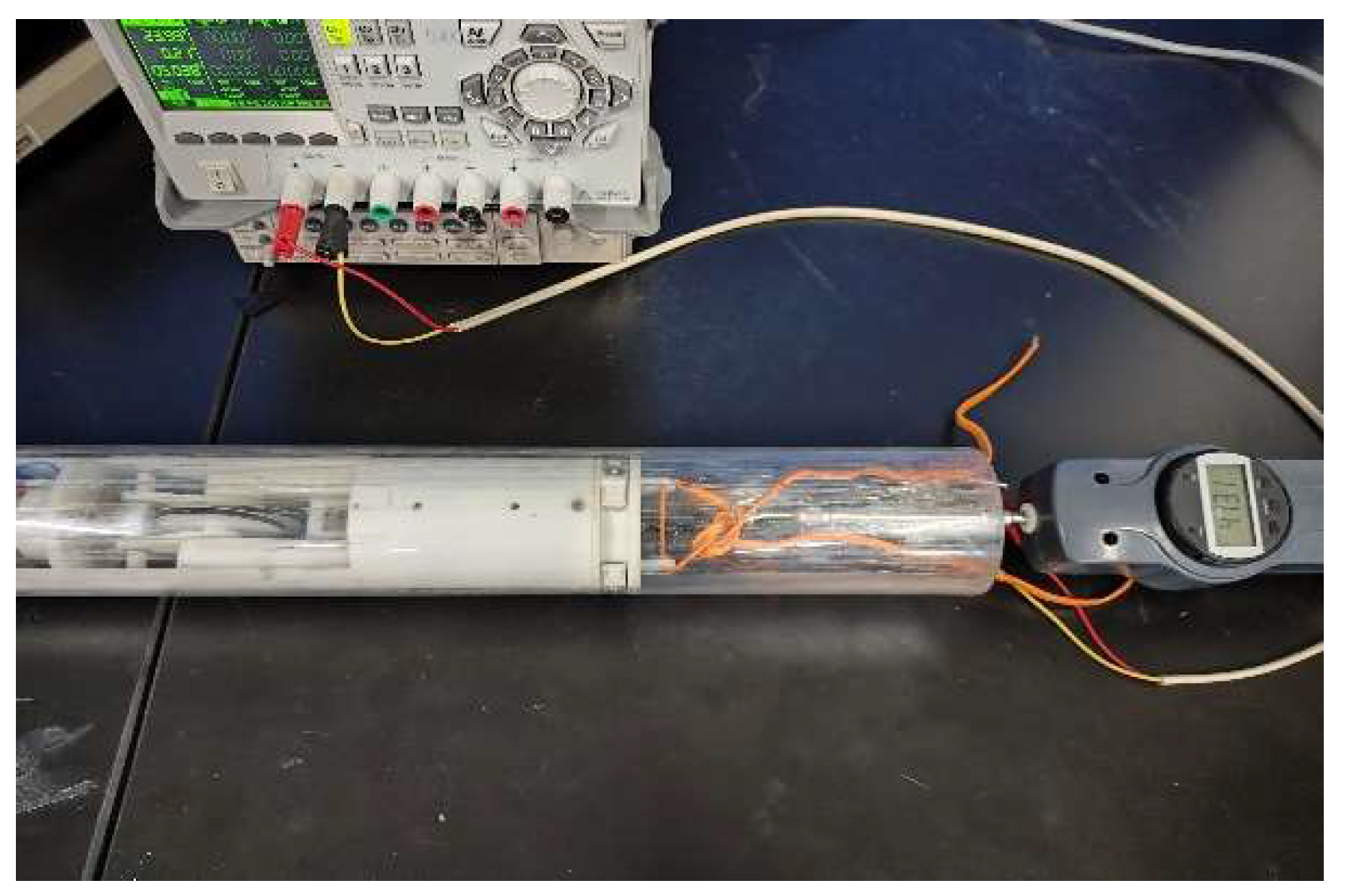
Figure 13.
Traction test
There are flammable gases such as gas in coal mine holes, so the current and power of the small robot for mine hole detection cannot be too large. After testing, the maximum drive current of the robot is 0.4and the maximum power is 12 W,which meets the actual demand.

Table 1.
Specification parameters of the single group module of the small robot for mine hole inspection
Table 1.
Specification parameters of the single group module of the small robot for mine hole inspection
| Name | Parameters |
| Outer diameter | 65 |
| Length | 300 |
| Weight | 0.925 |
| Maximum drive current | 0.4 |
| Maximum power | 12 |
| Horizontal traction | 40 |
5.2. Robot routine parameter testing
Given that mine holes are not always horizontal, the tiny robot designed for mine hole inspections must be able to climb and maintain an appropriate speed. Both the crawling speed and climbing ability of this mine hole inspection robot are put to the test. A vertical scale is affixed to one end of the PC pipe. We calculate the height to which the PC pipe can be lifted at various angles and record these measurements on the vertical scale. Starting from the horizontal position, we gradually lift the PC pipe, timing how long it takes for the robot to traverse the pipe at each angle. This lets us indirectly measure the robot's crawling speed on varying slopes. After the measurement, it is known that the maximum crawling speed of the robot is 3.96 m/min, and the maximum crawling slope is 90°. Crawl times are hand-recorded with a maximum error of 0.3%.
After curve fitting analysis, the speed of the robot increases with the angle, and the attenuation is only 0.592%; it can be considered that the crawling speed of the robot is more stable and has good adaptability; there is no strict standard for the propulsion speed of the coal mine hole detection instrument, and it needs to be changed flexibly according to the actual situation of different mines. It is generally required that the propulsion speed of the instrument should not be more incredible than 6 m/min. Therefore, the robot of this design can meet the actual requirements.
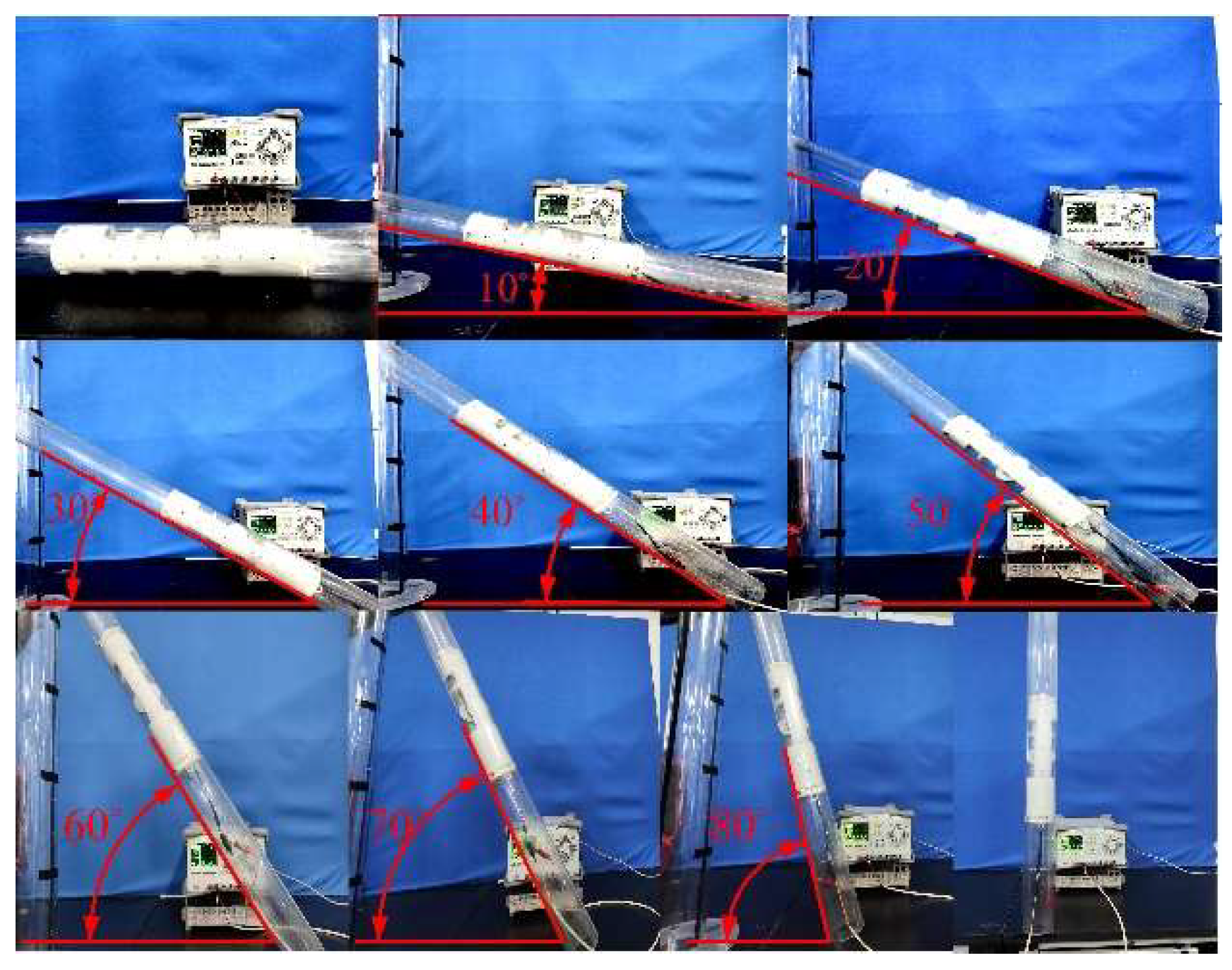
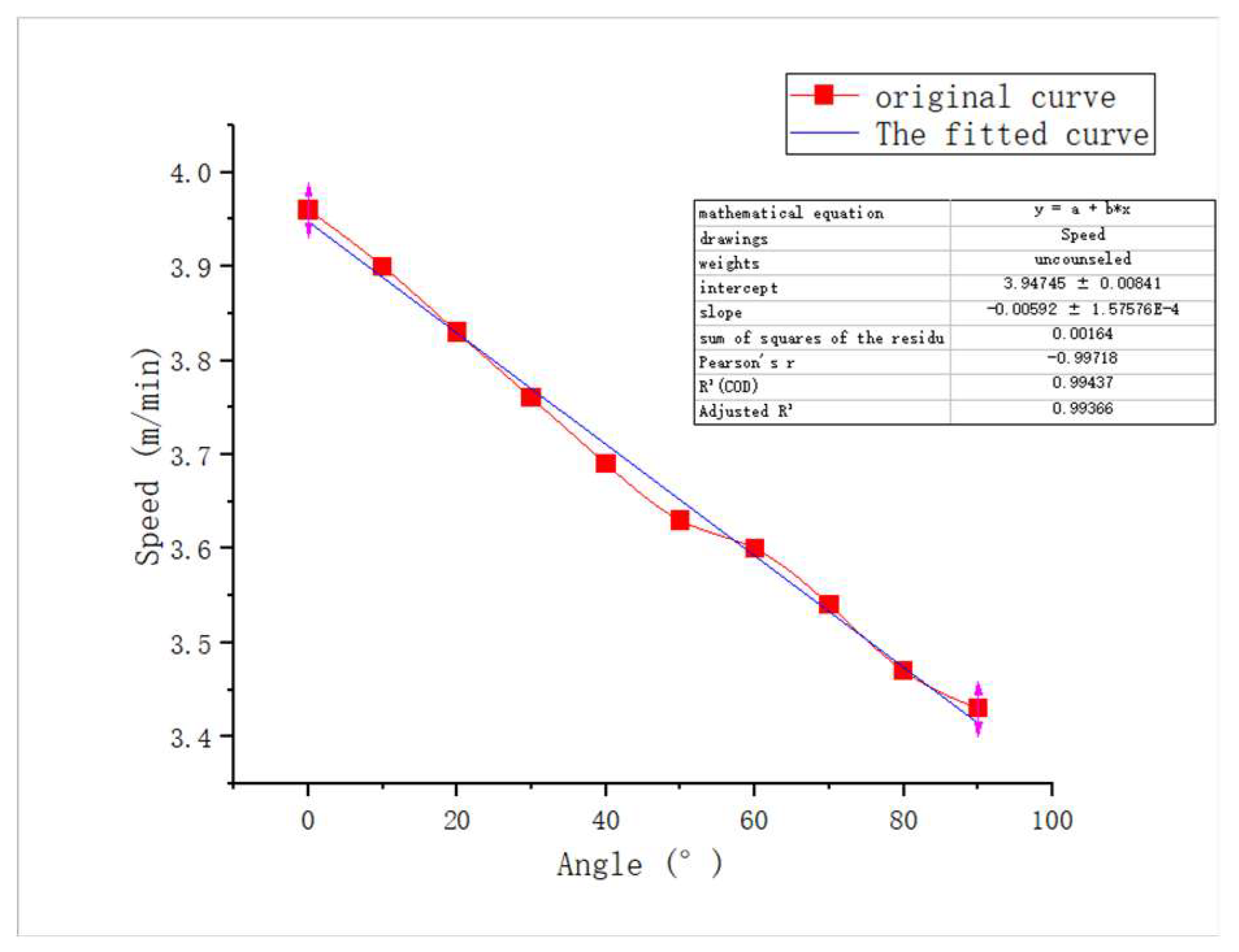
Figure 14.
Climbing ability test
Table 2.
Climbing ability test results
| Slope (°) | Speed (m/min) |
|---|---|
| 0 | 3.96 |
| 10 | 3.90 |
| 20 | 3.83 |
| 30 | 3.76 |
| 40 | 3.69 |
| 50 | 3.63 |
| 60 | 3.60 |
| 70 | 3.54 |
| 80 | 3.47 |
| 90 | 3.43 |
Figure 15.
Analysis of results
6. Conclusion
With the increase of coal mining resources, mining operations in complex areas have increased. However, these areas were characterized by complicated hydrogeological conditions, which resulted in issues such as water damage, collapses, roof collapses, and other mining-related accidents. The deployment of mine hole detection technology proved effective in minimizing such accidents. In this study, we aimed to examine the shortcomings of existing mine hole inspection technologies and propose a configuration for a small mine hole inspection robot specifically designed to operate in the complex environment found in coal mines. The robot had a radial diameter of 65 mm, making it suitable for small bores ranging from 65 mm to 100 mm in size. Notably, it exhibited excellent crawling performance and low power consumption of only 12 W. Additionally, it was equipped with waterproof, explosion-proof, and variable-diameter capabilities, allowing it to adapt to the complex conditions encountered in coal mine boreholes. This robot provides essential technical support for the detection of coal mine boreholes. The main research work of this paper is as follows:
- (1)
- Functional analysis and structural design of a small robot for mine-hole inspection were carried out according to engineering requirements. The variable diameter function was designed to adapt to the unevenness of mine holes. The force situation was theoretically analyzed, and the optimal parameters of the critical structure were calculated to ensure the working life of the robot.
- (2)
- Based on the three-dimensional modeling software, the structural model of the small robot for mine-hole detection was established. The gear structure was used to reduce the radial size of the robot to adapt to the small diameter of the mine hole; the buffer structure was set up, and its three-legged design could effectively support the body, keep the body in the center axis of the mine hole, and improve the shooting quality and passability; the gimbal structure was designed to facilitate the expansion of the robot.
- (3)
- The small robot's hardware circuit and control program for mine-hole detection were designed to focus on the waterproof and explosion-proof design for the problem of water and gas inside the mine hole. The circuit components were strictly encapsulated to prevent short-circuiting or electric sparks in case of water. The power of the whole machine was limited to no more than 12 W, which met the engineering requirements.
- (4)
- Tested on the mine hole detection small robot, the test results showed that the mine hole detection small robot worked with a hole diameter of 65mm to 100 mm, had a maximum power of 12W, a top crawling speed of 3.96 m/min, and a maximum crawling slope of 90°. The experimental results demonstrated that the mine hole detection robot could adapt to the coal mine hole environment and meet engineering needs.
Supplementary Materials
Not applicable.
Author Contributions
Conceptualization, G.L. and L.H.; investigation, F.Z. and Z.L.; methodology, W.Z. and X.X.; supervision, G.L. and X.X.; validation, F.Z. and Z.L.; writing—original draft, F.Z. and Z.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by State Key Laboratory of Gas Disaster Detecting Open Fund, grant number 2021SKLKF11 and National Natural Science Foundation of China, grant number 51974273.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
Heartfelt thanks to those who helped with this research.
Conflicts of Interest
Author Li Hao is employed by the company "China Coal Technology & Engineering Group Corp". The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Li, C.M.; Nie, R. An evaluating system for scientific mining of China's coal resources. Resources Policy 2017, 53, 317–327. [Google Scholar] [CrossRef]
- You, M.; Li, S.; Li, D.; Xu, S. Applications of artificial intelligence for coal mine gas risk assessment. Safety Science 2021, 143. [Google Scholar] [CrossRef]
- Yang, G.; Wang, J.; Shao, W.; Wang, H. The Relationship Between China's Coal Resource Development and Water Resource. Energy Procedia 2015, 75(C). [Google Scholar] [CrossRef]
- Shi, Y.; Chen, J.; Hao, J.; Bi, J.; Qi, M.; Wang, X. Statistical Analysis of Coal Mine Accidents of China in 2018. 2019 Prognostics and System Health Management Conference (PHM-Qingdao), 2019.
- Zhu, Y.; Wang, D.; Shao, Z.; et al. A statistical analysis of coalmine fires and explosions in China. Process Safety and Environmental Protection 2019, 121, 357–366. [Google Scholar] [CrossRef]
- Ke, W.; Wang, K. Impact of Gas Control Policy on the Gas Accidents in Coal Mine. Processes 2020, 8, 1405. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, X.; Dong, Y.; et al. 2008-2021 China's coal mine accident law analysis and forecast research[J]. Mining Safety and Environmental Protection 2023, 50, 136–140+146. [Google Scholar] [CrossRef]
- Cheng, L.; Xu, Y.; Jing, G.; et al. Statistical Analysis of National Coal Mine Accidents and Risk Classification of Accident Types[J]. Coal Technology 2023, 42, 128–132. [Google Scholar] [CrossRef]
- Lai, R.; Lin, W.; Wu, Y. Review of Research on the Key Technologies, Application Fields and Development Trends of Intelligent Robots. Springer, Cham, 2018.
- Moriyama, S. Traction force estimator of tracked mobile robot supported by the back-to- back test. IEEJ Transactions on Electrical and Electronic Engineering 2019, 14, 948–953. [Google Scholar] [CrossRef]
- Ge, S.; Hu, E.; Pei, W. Coal mine robot system and key technologies. Journal of China Coal Society 2020, 45, 455–463. [Google Scholar]
- Selvarajan, A.; Kumar, A.; Sethu, D.; et al. Design and Development of a Snake-Robot for Pipeline Inspection// 2019 IEEE Student Conference on Research and Development (SCOReD). IEEE, 2019.
- Yi, X.; Ping, G.; Hu, F.; et al. Design and Experimental Verification of a Novel Foam Smart PIG for Pipe Deformation Detection[J]. Journal of Mechanical Engineering. [CrossRef]
- Sera, F.; Kakogawa, A.; Ma, S. Joint Angle Control of an 8-inch Gas Pipeline Inspection Robot to Pass through Bends[C]// 2019 International Conference on Advanced Mechatronic Systems (ICAMechS). 2019.
- Tu, Q.; Liu, Q.; Ren, T.; et al. Obstacle crossing and traction performance of active and passive screw pipeline robots. Journal of Mechanical Science and Technology 2019, 33, 2417–2427. [Google Scholar] [CrossRef]
- Okamoto, J., Jr.; Adamowski, J.C.; Tsuzuki, M.S.G.; Buiochi, F.; Camerini, C.S. Autonomous system for oil pipelines inspection. Mechatronics 1999, 9, 731–743. [Google Scholar] [CrossRef]
- Kim, H.M.; Yun, S.C.; Lee, Y.G.; et al. Novel Mechanism for In-Pipe Robot Based on a Multiaxial Differential Gear Mechanism. Mechatronics, IEEE/ASME Transactions on 2017, 22, 227–235. [Google Scholar] [CrossRef]
- Yan, H.; Wang, L.; Li, P.; et al. Research on Passing Ability and Climbing Performance of Pipeline Plugging Robots in Curved Pipelines. IEEE Access 2020, 8, 173666–173680. [Google Scholar] [CrossRef]
- Hadi, A.; Hassani, A.; Alipour, K.; et al. Developing an adaptable pipe inspection robot using shape memory alloy actuators. Journal of Intelligent Material Systems and Structures 2020, 31, 632–647. [Google Scholar] [CrossRef]
- Bogue, R. Applications of robotics in test and inspection. Industrial Robot 2018, 45, 169–174. [Google Scholar] [CrossRef]
- Debenest, P.; Guarnieri, M.; Hirose, S. PipeTron series - Robots for pipe inspection[A].Proceedings of the 2014 3rd International Conference on Applied Robotics for the Power Industry[C],2014.
- Qi, W.; Kamegawa, T.; Gofuku, A. Helical wave propagation motion for a snake robot on a vertical pipe containing a branch. Artificial Life and Robotics 2018, 23, 515–522. [Google Scholar] [CrossRef]
- Mariko Inazawa; Tatsuya Takemori; Motoyasu Tanaka; Fumitoshi Matsuno. Motion Design for a Snake Robot Negotiating Complicated Pipe Structures of a Constant Diameter. 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020.
- Piotr A. Bogdan; Jonathan Wheadon; Frederico B. Klein; Mario Gianni. Magnetic Tracked Robot for Internal Pipe Inspection[A].2021 European Conference on Mobile Robots (ECMR)[C],2021.
- Zhao, W.; Zhang, L.; Kim, J. Design and Analysis of Independently Adjustable Large In-Pipe Robot for Long-Distance Pipeline[J]. Applied Sciences 2020, 10, 3637. [Google Scholar] [CrossRef]
- Kakogawa, A.; Ma, S. Design of a multilink-articulated wheeled pipeline inspection robot using only passive elastic joints. Advanced Robotics 2018, 32, 37–50. [Google Scholar] [CrossRef]
- Cao, E.; Tan, H.; Bian, Y.; Guo, Z.; Zhou, F. Design and Realization of a 6-Wheeled In-Pipe Robot. Journal of Physics: Conference Series 2022, 2356, 012010. [Google Scholar] [CrossRef]
- Sawabe, H.; Nakajima, M.; Tanaka, M.; Tanaka, K.; Matsuno, F. Control of an articulated wheeled mobile robot in pipes[J]. Advanced Robotics: The International Journal of the Robotics Society of Japan 2019, 33, 1072–1086. [Google Scholar] [CrossRef]
- You, S.; Zhu, H.; Zhao, Y.; et al. Research Status and Development Direction of Coal Mine Disaster Relief Robots[J]. Industry and Mine Automation 2017, 43, 14–18. [Google Scholar] [CrossRef]
Figure 2.
The crawler wheel force analysis schematic
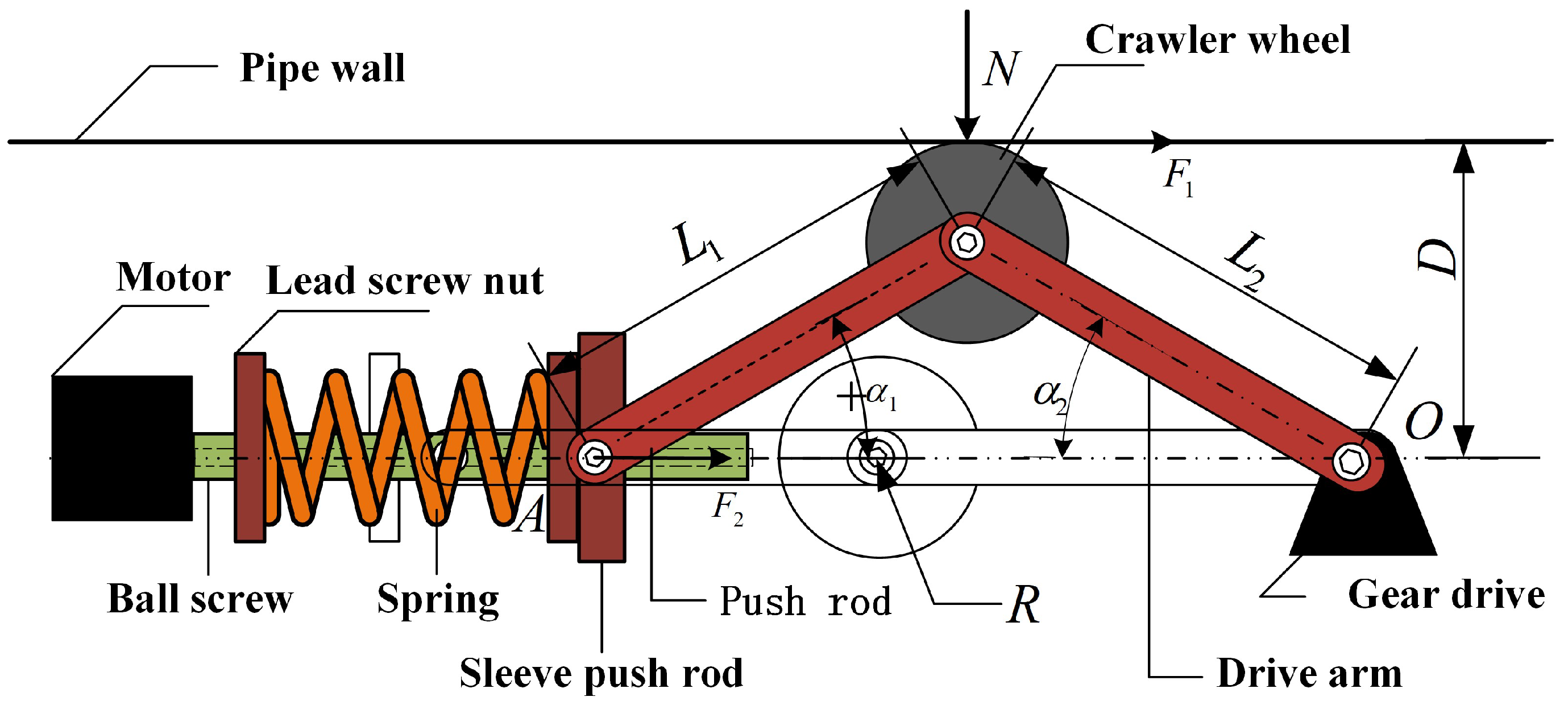
Figure 3.
Finite element analysis cloud diagram
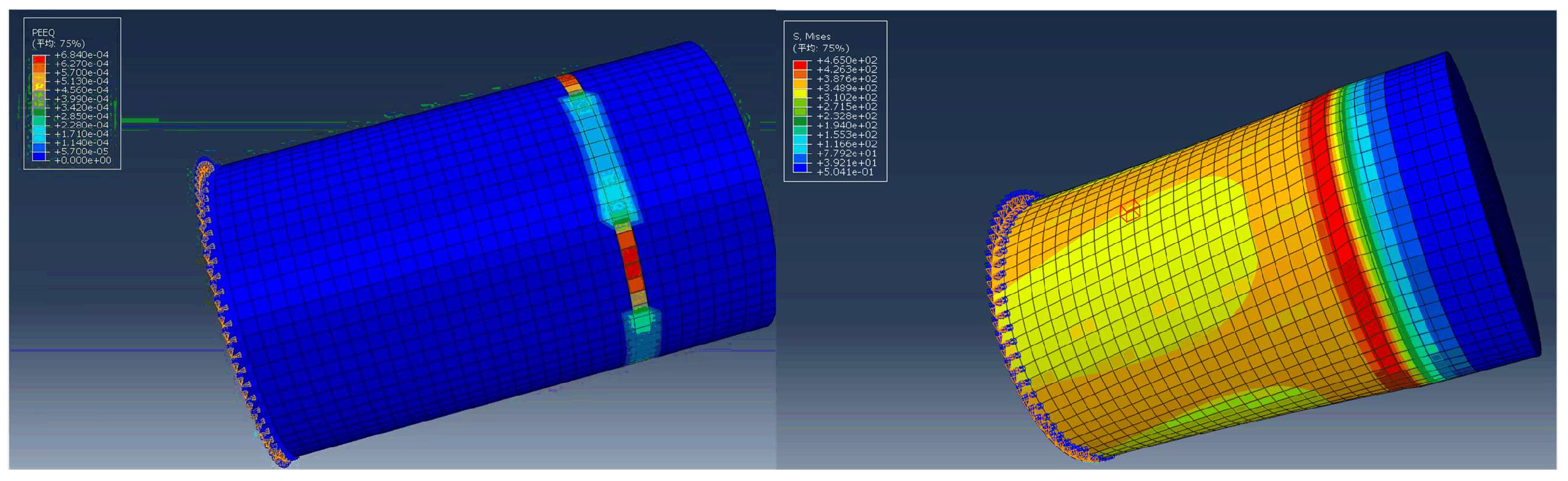
Figure 4.
General structure of the robot
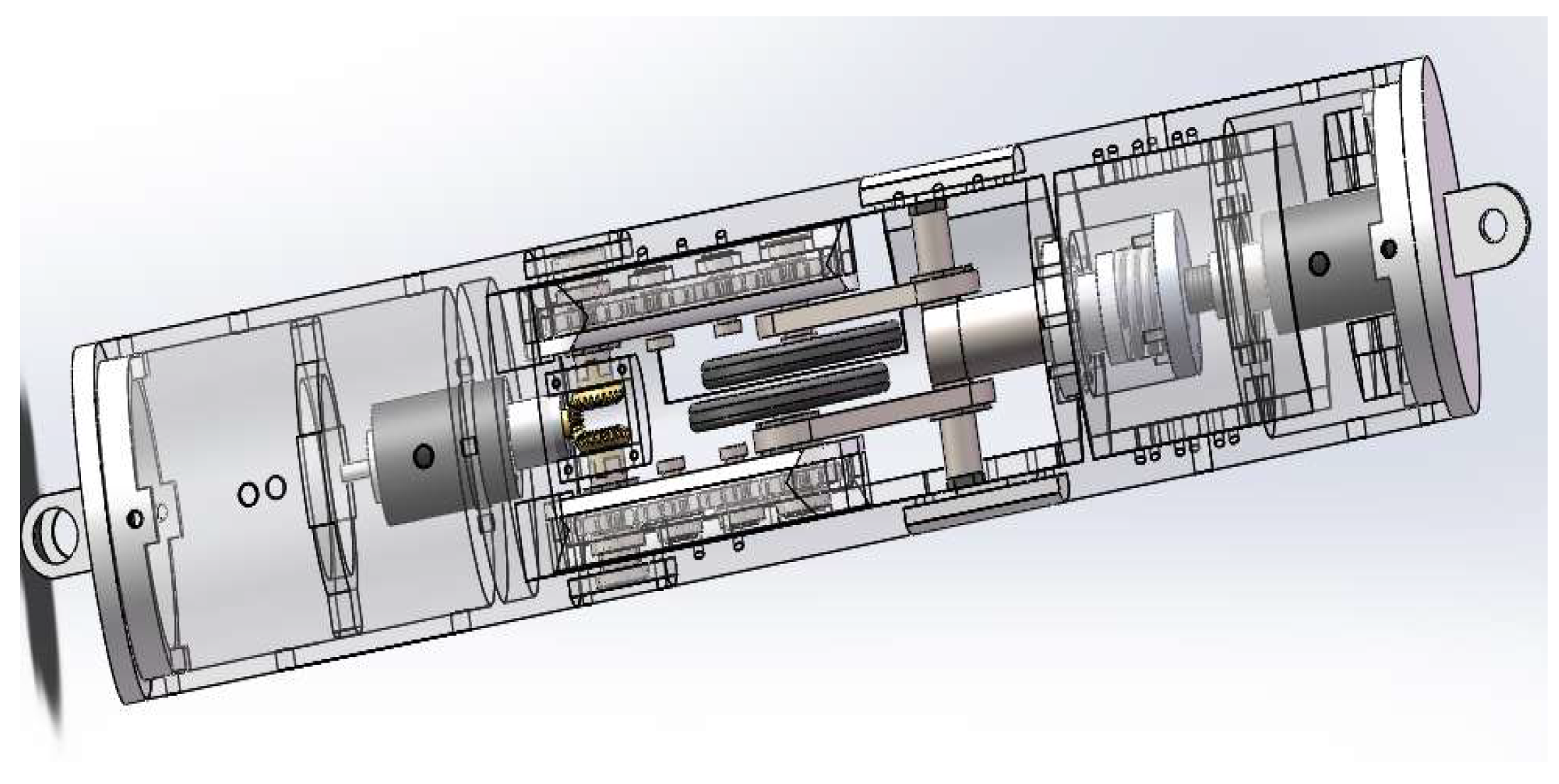
Figure 5.
Schematic diagram of power system
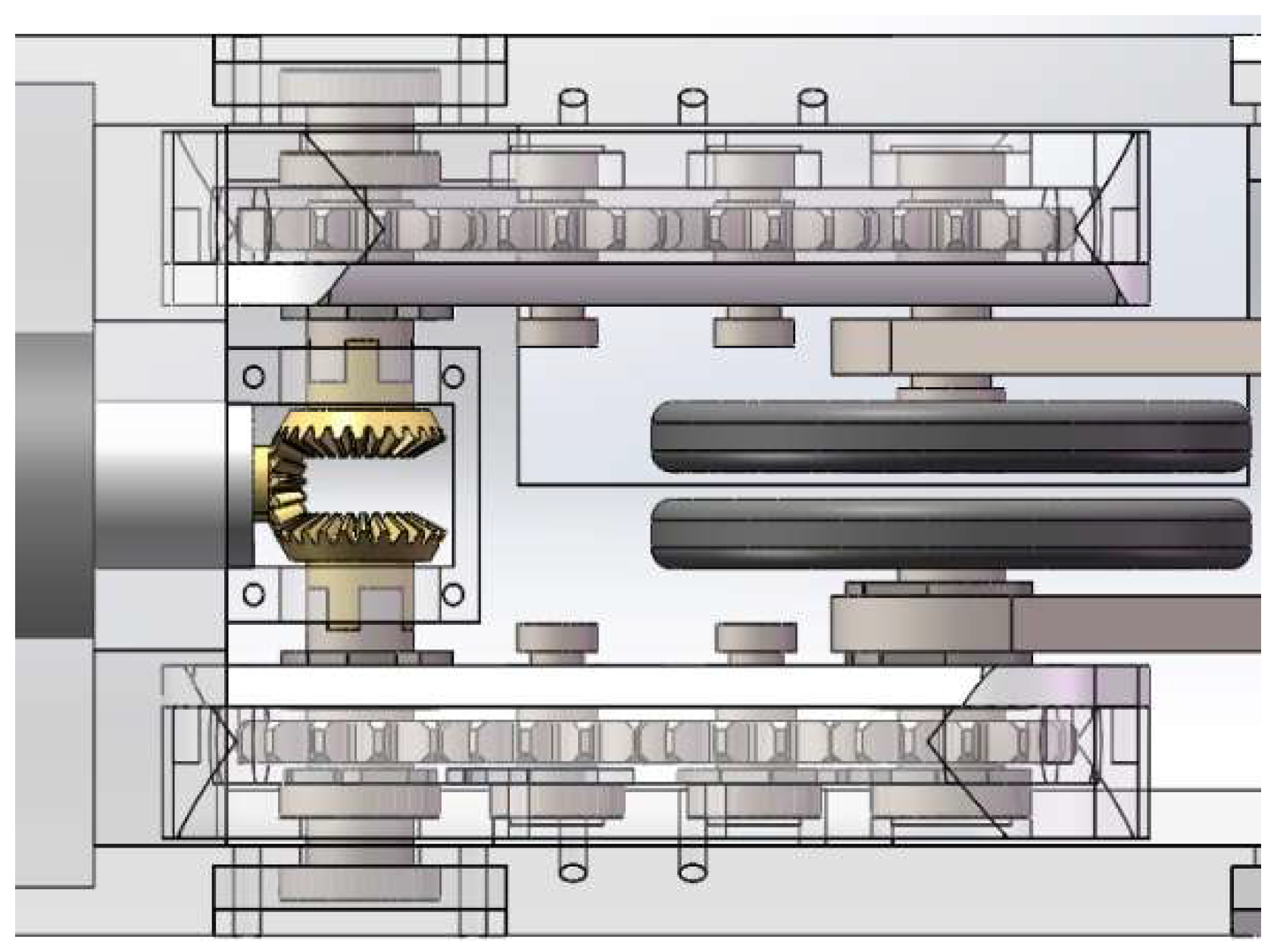
Figure 6.
Schematic diagram of the reducer structure
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



