
Submitted:
09 November 2023
Posted:
10 November 2023
You are already at the latest version
Abstract
The paper proves the existence of a family of axisymmetric equilibrium figures as solutions of a stationary problem with unknown boundaries for the Navier–Stokes equations corresponding to the slow rotation of a viscous compressible two-layer liquid mass about some axis. It is assumed that the liquids are barotropic, capillary and have different viscosities, the internal fluid being bounded by a closed surface. This interface does not intersect with the external boundary of the cloud. The proof is based on implicit function theorem and carried out in the Hölder spaces.
Keywords:
equilibrium figures
; viscous compressible two-layer fluid
; capillary forces
; interface problem for the Navier – Stokes system
; the Hölder spaces
MSC: Primary 35Q30; 76T06; 76D05; 76D06; Secondary 35R35; 76D03
1. Introduction
Existence of an equilibrium surface for an isolated compressible liquid mass rotating about a fixed axis was first proved in [9]. Our aim is to prove the existence of equilibrium figures for a rotating compressible two-layer fluid.
The problem of the rotation of an isolated incompressible liquid mass about a fixed axis as a rigid body was considered by many famous mathematicians, among them were Newton, Maclaurin, Jacobi, Kovalevskaya, Lyapunov, Poincare and others [1,2,3], who mainly studied the movement without capillarity. The capillary fluids were first investigated by Globa-Mikhailenko [4], Boussinesq and Charrueau in the begining of 20th century. The latter gave a detailed analysis of the problem, calculated the shape of equilibrium figures, including the toroidal case, and considered some aspects of the stability [5,6]. These results were included in a big review on this subject presented in the book of Appell [7]. Stability problem for various ellipsoidal equilibrium figures is analyzed in monograph [8].
Now we state, in a complete setting, the problem on unsteady motion of two compressible barotropic fluids of finite volume separated by a closed unknown interface.
At the initial instant , let a fluid with dynamic viscosities , be in a bounded domain , and in the domain , surrounding it, there be a fluid with dynamic viscosities , ;
The domain is bounded by the free surface and includes the closed interface ; are given. This two-component cloud rotates about the vertical axis with an angular velocity .
For , it is necessary to find the surfaces , , as well as velocity vector field and the density of the fluids satisfying diffraction problem for the Navier – Stokes system
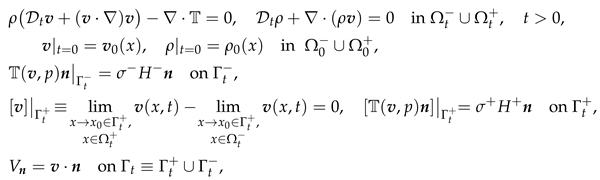
where
is stress tensor, is double strain rate tensor, is identity matrix; , are step functions of dynamic viscosities, equal to , in and , in respectively; is fluid pressure given by a known smooth density function; and are initial distributions of velocity and density of the liquids, is the outward normal vector to the union ; are twice the mean curvatures of the surfaces (moreover, at points of convexity towards ); are surface tension coefficients on and , respectively; is the rate of evolution of in the direction . We assume that the Cartesian coordinate system is introduced in the space . The central dot denotes the Cartesian scalar product.
We mean summation over repeated indices from 1 to 3 if they are denoted by Latin letters, and from 1 to 2 if they are Greek. We mark vectors and vector spaces in bold. The notation denotes the vector with the components , .
The kinematic boundary condition excludes mass transfer across fluid boundaries. It follows from our assumption that the fluid particles do not leave the boundaries during the time.
Local (in time) solvability was proved for problem (1) in the whole space with a closed interface between the fluids. The result was obtain both in the Sobolev – Slobodetskiǐ classes of functions [10] and in the Hölder ones [11]. One can get similar results for a two-component domain bounded by a free boundary if one takes into account the estimates for a model problem in a half-space [12,13].
As we have mentioned, we suppose the liquids to be barotropic which implies that the pressure p is a known increasing function of the density: . Let, in addition, , .
We assume that equilibrium figures , are nearly globular domains with the radiuses (), and the motion of fluids is close to the state of rest, i.e., the velocity is small, and the density differs little from a step function . This picture is schematically presented in Figure 1. We denote the balls by .
We are going to prove the existence of and , the boundaries of the figures and , respectively. We follow the plan of paper [9].
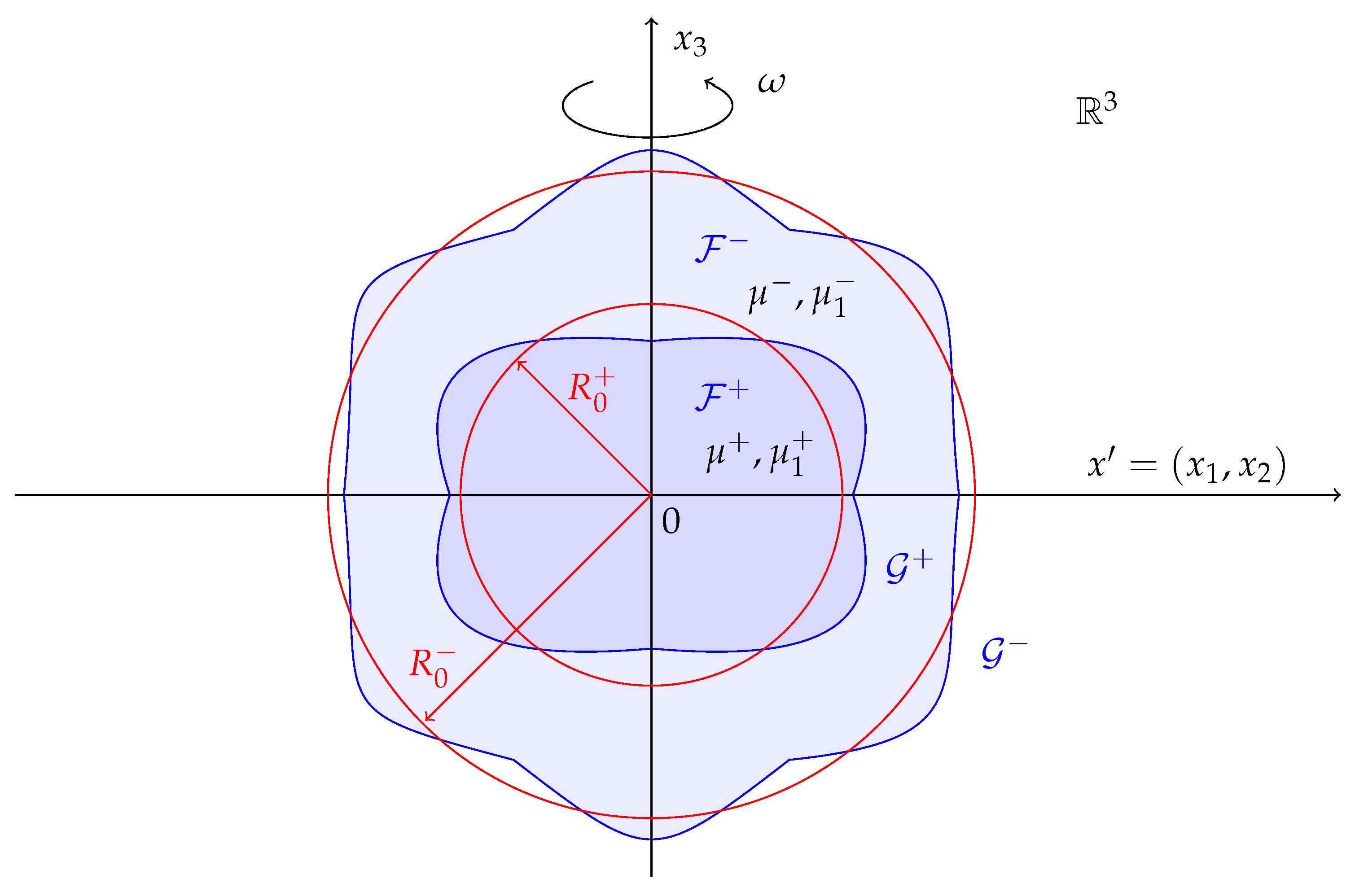
Figure 1.
Equilibrium Figures for a Two-Layer Compressible Fluid.
At rest, the bubble consisted of nested spherical two layers and with uniform distributions of densities has the piecewise constant pressure:
The masses of the layers are
Steady motion of a two-layer gaseous body uniformly rotating about the axis with a constant angular velocity is governed by the homogeneous stationary Navier–Stokes equations
(here the density and velocity depend only on x) and the boundary conditions
where , are twice the mean curvatures of , , respectively. The last relation follows from the boundary condition . The pressure depends on .
It is easily seen that velocity vector field
satisfies (4) together with pressure function gradient
where is the ith basis vector, .
First, we consider the simple case when equality (7) coincides with the following one
whence and in with constants , because pressure functions can differ each other in different domains by a constant. These constants can be found from relations (2):
Let be the unit sphere in with the center in zero, . We suppose to be given by functions on . In addition, let be rotationally symmetric, i.e., they depend only on and , and be even in .
By substituting given by (6) and into boundary conditions (5), we obtain the equations for the surface of the domain and for the interface between the fluids:
Rotationally symmetry implies that do not depend on . It is clear that , since the first two components of are proportional to ones of the radial vector of the circles to be horizontal sections of . Therefore on .
Obviously, the density is given by the formulas
with arbitrary positive constants and , equations (9) taking the form
One can determine the constants by prescribing the masses of fluids to be the same as that of the nested spherical liquid layers (3):
We consider the angular momentum to be one more parameter of the problem. It is given:
where is the ith solid rotation vector, . Then the angular velocity is a function of .
We denote by , , , the Hölder space of functions f on the sphere with the norm
where is th derivative of f calculated in local coordinates on the subdomain , . Under , we mean the subspace of consisting of rotationally symmetric functions that are even with respect to .
Theorem 1.
Let , , and let the data of problem (4), (5) be such that condition (26) holds. Then for an arbitrary β satisfying the estimate
with small enough ε, there exists a unique solution to system (11)–(13). It obeys the inequality
2. Proof of Theorem 1
Proof.
In order to linearize system (11), we apply the formula for the first variation of a functional . According to [14,15], the first variation of twice the mean curvature of with respect to the double curvature of the sphere is
where is the Laplace – Beltrami operator on and ; , is the outward normal to . This yields
where , in view of (2);
We integrate equations (16) over by parts, then we get
The integrals can be expressed in terms of the differences of the volumes and , . For example,
and hence
where .
We rewrite (12) as follows
where . On the other hand, , . That’s why
We express from (20) and substitute in (19). Then equalities (18) imply that
and
Finally, we have
In order to prove the solvability of system (16), (13), (21), (22), we use implicit function theorem. We represent this system as a nonlinear vector equation:
where , , ,
We linearize (23) at zero and show that the derivative of at this point is not equal to zero. Thus,
where is the Fréchet derivative of , that is,
and with
Let and . Using fixed point theorem, we will show that equation (23) is solvable in
In [16] (see the corollary to Theorem 2.1), it was proved that for any the equation
has a unique solution and
Moreover, due to the assumptions of the theorem, the determinant of the matrix in the left hand sides of two equations is not equal to zero:
(Here we have taken into account relations (8).) Hence, this matrix is invertible. Thus, the whole operator is also invertible and
where and
Therefore, equation (24) can be written in the form:
Let us now estimate the non-linear operator . The term given by (17) can be written as
where is twice the mean curvature of the surface ; , ; is some point of the interval . One can write a similar formula for . The terms have the second order of smallness with respect to . After simple calculations for two values of the arguments and such that
it can be shown that the estimates
hold. This implies that maps the ball into itself and it is a contraction operator if
These inequalities are satisfied for such that
So if
then, by fixed point theorem, equation (27) has a unique solution in the ball with satisfying (29). Thus, equation (23) is also uniquely solvable for obeying inequality (30), which gives the estimate of in condition (14).
We now prove estimate (15). Since
then for
which coincides with inequality (15). □
Thus, we have shown that, for certain data of the problem, there are equilibrium figures for a two-layer compressible fluid, pressure function being and the density being determined by formulas (10).
3. General case
Now, we study the general case of pressure function. We assume only that is positive and may have a jump across .
Velocity vector field remains the same as above:
It satisfies (4) together with pressure function gradient We introduce such that
The function , . Since , there is an inverse function . And (31) implies
with arbitrary constants .
Substituting into equations (9), we have
We prescribe the masses of fluids and apply (32):
Then one has the equations for determining the constants .
Similar, a given angular momentum defines the angular velocity :
Let us state the main theorem.
Theorem 2.
Let , , and let be positive increasing functions such that equalities (2) are satisfied for it. Here . We assume also that the data of problem (4), (5) are subjected to condition (47). Then for an arbitrary β satisfying the estimate
with ε small enough, there exists a unique solution to system (33)–(35), and the inequality
holds.
Proof.
After linearisation, system (33) takes the form of (16) with
due to (2) and
Following Sect. 2, we obtain (18) by integrating equations (16) by parts but now with new (38) and (39). We substitute (19) in equality (18):
where .
We can write (34) as follows
In view of (3), we have
By expressing the differences and from equalities (41) and substituting them in (40), we arrive at
and
Next, we represent system (16), (35), (42), (43) in the form of vector equation (23) with , , ,
Then we apply again implicit function theorem to (23). To this end, we calculate the Fréchet derivative of at zero and linearize (23) at this point. As a result, one has
with ,
and , where
We recall the notation: and . By means of fixed point theorem, we prove the solvability of system (23) with (44) in
The existence of a unique solution to two first equations in (25) and the estimate for it are discussed in Sec. 2. The operator is invertible. In addition, we have assumed that the determinant of two equations with relations (46) is not equal to zero:
Therefore, the vector value operator is invertible too and the solution obeys the inequality
where ,
Hence, one can write equation (45) in the form (27).
We estimate the operator in the same way as in Sec. 2. Using formulas similar to (28) for the new functions , we conclude again that
for two values of the arguments and such that
By repeating the arguments of Sec. 2, we deduce that is a contraction operator if inequality (30) holds. Hence, fixed point theorem guarantees the existence of a unique solution to equation (27) in the ball with satisfying (29). Therefore (23) with given by (44) is also uniquely solvable for such that condition (30) holds. This inequality implies an estimate for in (36).
Estimate (37) follows from
if . □
Conclusions
Thus, we have shown the existence of axially symmetric equilibrium figures for a two-component compressible fluid when pressure function is given by a smooth growing function of fluid density and the data satisfy some condition. Under a small enough angular momentum these equilibrium figures are close to embedded balls. The next stage of investigation of the problem will consist in proving the existence of a global solution to the nonstationary problem for small initial data and its tendency to the stationary solution , as well as in studying the stability of equilibrium figures obtained. A new paper will deal with this investigation.
In addition, we note that our analysis has been carried out for the case of neglecting the gravity of liquids. This situation is realized in space, and our two-layer gas cloud can be considered, for example, as a gaseous planet or another cosmic rotating body.
References
- Lyapunov, A. M.: On stability of ellipsoidal shapes of equilibrium of revolving liquid, Editiion of the Academy of Scien., 1884 (in Russian).
- Lyapunov, A. M.: Sur les questions qui appartiennent aux surfaces des figures d’equilibre dérivées des ellopsoïdes, News of the Academy of Scien., (1916) p. 139.
- Poincaré, H.: Figures d’équilibre d’une mass fluide, Paris, Gautier–Villars, 1902.
- Globa-Mikhailenko, B.: Figures ellipsoïdales d’équilibre d’une masse fluide en rotation quand on tient compte de la pression capillaire, Comptes rendus, 160, 233 (1915).
- Charrueau, A. Ètude d’une masse liquide de révolution homogène, sans pesanteur et à tension superficielle, animée d’une rotation uniforme. Ann. de Ècole Normale Supérieure 1926, 43, 129–176. [Google Scholar] [CrossRef]
- Charrueau, A. Sur les figures d’équilibre relatif d’une masse liquide en rotation à tension superficielle. C. R. 1927, 184, 1418. [Google Scholar]
- Appell, P. Figures d’Équilibre d’une Mass Liquide Homogène en Rotation—Traité de Mécanique Rationnelle, v. IV, Fasc. I, 2nd ed.; Gautier–Villars: Paris, France, 1932. [Google Scholar]
- Chandrasekhar, S. Ellipsoidal Figures of Equilibrium, Yale University Press: New Haven and London, 1969.
- Solonnikov, V. A.; Tani, A. Equilibrium figures of slowly rotating viscous compressible barotropic capillary liquid, Advances in Math. Sciences and Applications, 1993 2(1), 139–145.
- Denisova, I. V. Problem on the motion of two compressible fluids separated by a closed free interface, Zap. Nauch. Semin. POMI 1997, 243, 61–86; English transl. J. Math. Sci. 2000, 99, 837–853. [Google Scholar] [CrossRef]
- Denisova, I. V. Solvability in weighted Hölder spaces of a problem governing the evolution of two compressible fluids, Zap. Nauch. Semin. POMI 2003 295, 57–89; English transl. in J. Math. Sci. 2005 127(2), 1849–1868.
- Solonnikov, V. A.; Tani, A. Free boundary problem for a viscous compressible flow with surface tension, in: Constantin Carathéodory: An International Tribute, World Scientific (1991), 1270–1303.
- Denisova, I.V.; Solonnikov, V.A. Classical solvability of a model problem in the half-space related to the motion of an isolated mass of a compressible liquid. Zap. Nauchn. Semin. Petersburg. Otdel. Mat. Inst. Steklov. (POMI). 2000,271, 92–113 (Russian); English transl. J. Math. Sci. 2003, 115(6), 2753–2765.
- Blaschke, W. Vorlesungen über Differentialgeometrie und geometrische Grundlagen von Einsteins Relativitätstheorie. I; Springer: Berlin, Germany, 1924. [Google Scholar]
- Solonnikov, V.A. On the problem of non-stationary motion of two viscous incompressible liquids. Probl. Mat. Analiz. 2006, 34, 103–121, Engl. transl. J. Math. Sci. 2007, 142, 1844–1866. [Google Scholar] [CrossRef]
- Solonnikov, V. A. Unsteady motions of a finite isolated mass of a self-gravitating fluid, Algebra i Analiz, 1989, 1(1), 207–249; English transl. in Leningrad Math. J. 1990, 1(1), 227–276.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



