
Submitted:
19 December 2023
Posted:
21 December 2023
You are already at the latest version
Abstract
The limits for recording weak signals for electrochemical seismic sensors are determined by their self-noise. At the same time, the noise nature is complex and not fully understood. In this work, for the first time, in addition to the frequency dependences of the noise amplitude, the difference in the phases of the noise currents of the cathodes of an electrochemical sensor has been studied. It has been established that at low frequencies the cathode currents change in an-tiphase. As the frequency increases, the phase difference becomes random. At the same time, the frequency at which the phase difference changes depend on the interelectrode distance; the clos-er the electrodes are located to each other, the greater it is. Physically, this effect is explained by the transition from noise caused by the integral flow of the working fluid to noise associated with vortex flows, the size of which depends on frequency. Thus, a new way of studying noise makes it possible to identify its physical nature and develop new methods of reduction.
Keywords:
electrochemical sensors
; MET sensors
; noise
; hydrodynamic fluctuations
1. Introduction
Molecular-electronic transfer (MET) sensors, also known in the literature as electrochemical motion sensors, have found application in areas where it is critical to detect very weak linear [1,2,3,4,5,6,7,8,9] and angular mechanical motions [10,11,12,13,14,15]. Such areas primarily include seismology and seismic exploration, as well as navigation-related applications [16,17,18]. The measurement limit of weak signals is defined by the self-noise of the sensors. That is why a significant number of publications are devoted to the study of the self-noise of MET sensors [12,19,20,21,22,23].
According to the classification presented in [19,24], the self-noise of a MET sensor includes the following components: thermo-hydrodynamic self-noise, convection-induced self-noise, geometric noise, shot noise and electronic self-noise. Further, a more detailed analysis showed that in relation to MET sensors of angular movements [12], not all mechanisms are equally significant; it is enough to take into account only three of the specified types of noise, which in this work was presented as the following equation:
Where is the power spectral density of the total noise, and the terms on the right side of the equation express, respectively, thermo-hydrodynamic, convection-induced and electronic self-noise. The authors of [24] also came to similar conclusions in relation to the noise of a small-sized MET accelerometer. In this case, thermodynamic noise is usually interpreted as random movements of the liquid inertial mass of the sensor as a whole, convective noise as a set of vortex motions of the liquid similar to Brownian motion, and electronic noise is mainly determined by the voltage noise of the operational amplifier, which converts the output current of the sensor into voltage. It should, however, be noted that this classification of noise is based only on the analysis of the dependence of the sensor’s self-noise on frequency. Essentially, this means that there is no direct evidence to support the correct interpretation of the physical mechanisms responsible for the noise.
In this work, the authors suggest to pay attention not only to the amplitude values of the noise, but also to its phase characteristics in order to more specifically identify the physical mechanisms responsible for the self-noise generation. The idea of the method used in this work is that the phase relationships between noise currents flowing between electrodes located at different distances from each other have been studied. Accordingly, if it concerns the noise associated with the hydrodynamics of the fluid flow, the presence of certain relationships between the phases of electrode currents indicates the participation in the generation of noise of random flows, the sizes of the vortices of which are no less than the distance between the electrodes. At the same time, the presence of stable phase relationships means that stochastic electrochemical processes do not make a noticeable contribution to the measured noise. The research in this work was carried out on angular motion sensors, since for this type of sensors, noise measurement is a much simpler task than for linear motion sensors. In real conditions, linear seismic vibrations significantly exceed angular motions and in order to eliminate the influence of seismic background on its results, in the laboratory where measurements are carried out, it is enough to conduct research in a quiet time of day, when there are no people in the building where the measurements are being taken and most of the equipment is turned off.
The results obtained show that a stable phase shift for noise electrode currents is observed in the low frequency region. In this case, the phase relationship between the currents for any pair of the studied electrodes coincides with the value that is observed when recording external signals. As the frequency increases, the relationships between the phases of the signal currents become random. It is noteworthy that the frequency range in which the relationship between the phases of noise currents and the same one for signals is wider, the closer the electrodes are located to each other. This result indicates that for the studied frequency range, there are two noise mechanisms. One of the mechanisms corresponds to the macroscopic movement of the entire volume of liquid through the transforming electrodes in exactly the same way as the movement of liquid under the influence of external signals. In the terminology adopted in [19], this corresponds to thermo-hydrodynamic self-noise. For another discovered mechanism, the noise between distant electrodes turns out to be uncorrelated, while for close electrodes the phase relationship between the currents remains the same as during the action of signals. Physically, this result should be interpreted as indicating a transition from thermo-hydrodynamic to convection-induced self-noise according to the currently accepted model.
The scientific importance of the result lies, firstly, in obtaining direct experimental evidence of a change in the nature of the phase relationships between the noise of electrode currents with increasing frequency. The nature of the changes is fully consistent with the concepts of the transition of thermodynamic noise associated with the macroscopic movement of the entire volume of liquid to convective type noise caused by vortex movements of limited size, which confirms the currently known models. The practical implication is that increasing the distance between the cathodes in an electrochemical cell can be beneficial for reducing self-noise by eliminating the correlation between noisy electrode currents, thereby reducing the impact of noise in subsequent processing.
2. Materials and Methods
Electrochemical angular motion sensors convert angular acceleration into electrical current through a system of electrodes immersed in an electrolyte solution. Typically, a solution is used with a high concentration of background electrolyte, which does not participate in electrode reactions, and a small addition of the active component. This active component is responsible for transporting charge across the liquid-metal interface at the electrode surface. It has been established [23] that in this case, to calculate the current that flows in the system, it is sufficient to take into account only the flows of the active component, considering both diffusion and convective transfer. The background electrolyte acts as a shield for the electric field in the liquid and thus suppresses charges migration. When electrical voltage is applied, an electrochemical, or background, current appears in the system, which does not depend on the presence of mechanical movement. In this case, electrochemical reactions create a concentration gradient of the solution components, and charge transfer in a stationary electrolyte is carried out by diffusion of ions from one electrode to another. In the presence of a mechanical signal, the electrolyte begins to move under the influence of inertial forces and, along with diffusion, additional convective transfer of ions to the electrodes occurs, which sharply changes the rate of delivery of reactants to the electrodes and, accordingly, the current flowing through the electrodes changes abruptly. An electric current appears in the system, additional to the background one, and this current is proportional to the external mechanical signal.
The work studies two types of electrochemical angular motion sensors. In both cases, the sensor is a hollow torus filled with electrolyte [12,15,24,25]. Mesh electrodes are located across the channel occupying the cavity inside the torus, separated by porous partitions to prevent mutual contacts between the electrodes. The outer diameter of the toroid is 45 mm, the channel size is 6x6 mm, the thickness of the outer walls is 2.5 mm. Then the radius of the channel axis passing through the center of its cross-section is 17 mm. Note that in [12,26] a larger toroid with a corresponding radius of 19.5 mm was used.
In sample 1 of the electrochemical sensor of the first type, the electrode system was a sensitive element consisting of two pairs of anode-cathode located symmetrically relative to the center of the converting element (Figure 1a). Thus, when the electrolyte solution moves, a change in the concentration of the active component causes a positive change in the current of one of the cathodes and a negative change for the other.
Sample 2 contained two of the above-described sensitive elements located opposite to each other (Figure 1b).
A potential difference was applied between the electrodes, setting the operating point for the interelectrode voltage. At the same time, for each sensor, regardless of its type, the anodes were combined with each other and connected to a constant voltage source of 300 mV. Each cathode was connected to the electronics using the circuit shown in Figure 2. The output signals for each such circuit were connected to an analog-to-digital converter (ADC) (Figure 3). With this connection, all cathodes are at the same potential, equal to the ground potential of the electronic board, and the voltage at the output of each such circuit is proportional to the electrode current. For frequencies < 100 Hz, studied in this work, the proportionality coefficient is equal to the value of the resistor R1 - 5100 Ohm. Capacitor C1 provided filtering at high frequencies, and the chain of resistor R2 and Capacitor C2, in addition to filtering the high-frequency signal, prevented interference on the wires leading to the ADC from reaching the input of the operational amplifier.
The sensor and electronics were placed in a thermally insulating casing (Figure 3), the ADC was connected to the PC on which data processing was carried out.
3. Results
3.1. Research of amplitude-frequency and phase-frequency characteristics of sensors on a vibration stand
Unlike previous studies, this work did not study the difference in cathode currents for the sensitive element, but each cathode current separately. First of all, using the method and vibration stand described in [12], the frequency response and phase response were obtained for each of the cathodes depending on the applied external angular motion. The measurement results are presented in Figure 4 and Figure 5.
From the presented graphs, we can conclude that the amplitude-frequency characteristics of the cathode currents are close to each other, which reflects the repeatability of the geometry of the converting element, as well as the fact that the external signal creates a general flow of working fluid in the sensor toroid, the value of which is the same for all cathode-anode pairs through which it passes.
The phase characteristics for cathodes located in one converting element at all frequencies differ by π, which is associated with the antisymmetry of the cell. At that moment in time, as in one anode-cathode pair the liquid flow is directed from the anode to the cathode, in the other pair the flow occurs from the cathode to the anode. For the case of a sensor containing two converting elements, the phase difference is equal to 0 for the pairs in which the anodes and the cathodes are arranged in a circle in the same order and is equal to π for the pairs in which the order of the electrodes is opposite.
The results obtained here fully confirm the a priori expected patterns in the behavior of the amplitude response and phase response of individual cathode currents and, in this sense, are significant only as a check of the correct operation of the equipment and the methods for processing the results. In addition, it is confirmed that changes in the method of collecting the output signal, compared to previous works, do not affect the measured characteristics.
3.1. Amplitude and phase characteristics of noise cathode currents
To study the self-noise of the electrochemical angular motion sensor, signals from the cathodes were recorded for a long time and at night, with a minimum level of external noise and under stable temperature conditions.
The calculation of the spectral density of self-noise was carried out in such a way that the results obtained could be compared with data from [12], in which noise was determined in units of spectral density of equivalent angular acceleration without separating the contributions from the individual cathodes. For this purpose, in this work the following method of recalculation of the obtained data has been used. First of all, the original recording obtained during quiet time was divided into N sections. For each of the sections, the Fourier components of the output current were calculated, where for the sensor with one transforming element and for the sensor with two transforming elements. means cathode 1, cathode 2, cathode 3, cathode 4. After this, the Fourier components of the measured angular accelerations were calculated:
Here is the complex transfer function for the cathode number n, defined above in the section 2. The factor iω converts the result from the units of angular velocity into the units of angular acceleration. The summation is carried out for two cathodes for sample 1 and for four cathodes for sample 2. Then the power spectral density (PSD) was calculated and averaged over all the recording sections.
The resulting curves are presented in Figure 6 (sample 1) and Figure 7 (sample 2). Similar to previous works, the result is presented in decibels relative to 1 rad2/sec4/Hz.
For sample 1 at all frequencies, the results obtained are consistent with the results of previous works if we introduce a correction factor of 1.315 (, equal to the ratio of the squares of the radii of the toroidal channels axes. For sample 2, the noise at low frequencies is higher by about 3 dB, which is explained by the higher hydrodynamic resistance of the sensor with two transforming elements and the associated increase in thermo-hydrodynamic self-noise.
The phase difference between the signals from the cathodes was calculated as follows. The section of the noise recording corresponding to quiet time,
, was divided into equal sections, each 4 seconds long. Introduce a function equal to the following:
where is the phase difference between the cathodes and in the -th section:
Here and are the Fourier images of the signals from the cathodes and in the -th section, respectively.
By averaging over all parts of the recording, find the averaged phase difference between the cathodes k and l in all sections of the signal recording
The phase differences thus obtained between the noise signals from the cathodes are presented in Figure 8 and Figure 9.
For the sensor with one sensitive element, a stable phase shift between the noise signals from the cathodes is observed in the low frequency region up to ∽16 Hz. This phase relationship between the signals coincides with the value observed when recording external signals. As the frequency increases, the relationship between the phases of the signals becomes random, and its average value approaches zero. This result indicates that for the studied frequency range, there are two noise mechanisms. One of the mechanisms corresponds to the macroscopic movement of the entire volume of liquid through the converting electrodes, similar to the movement of liquid under the influence of external signals, which characterizes thermo-hydrodynamic self-noise. For the other mechanism, the noise of the cathode currents turns out to be uncorrelated.
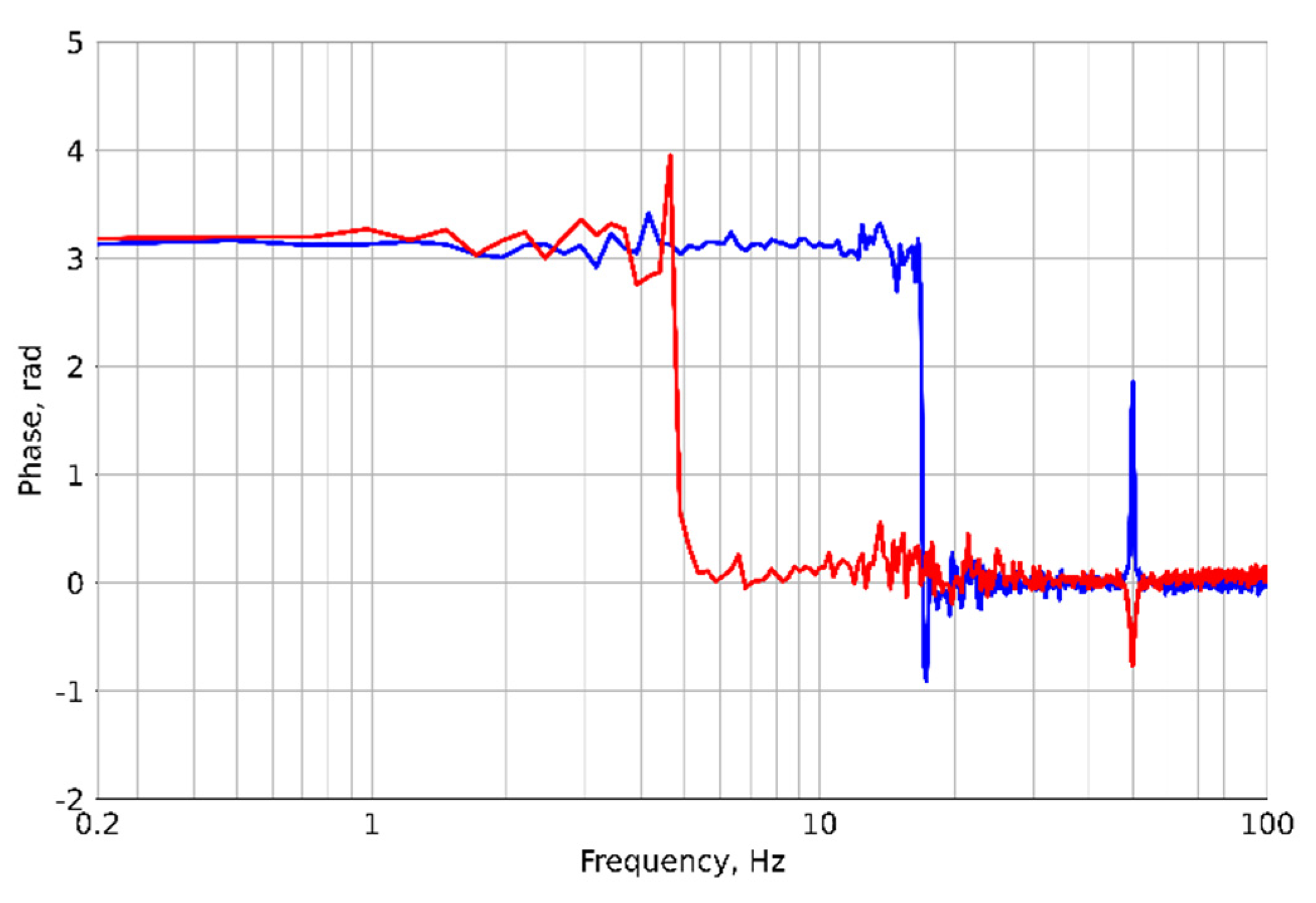
For the sensor with two sensitive elements, the average phase difference of noise signals from the cathodes included in different sensitive elements (K1 and K4) is equal to π for the frequencies below ∽5 Hz, and then the noise signals become uncorrelated. At the same time, for noise signals from the cathodes inside one sensitive element, the phase relationship between them remains the same as under the action of external accelerations, up to the same values as for a sensor with one sensitivity element (∽16 Hz). This indicates the participation in the generation of noise in this frequency interval of random flows, the sizes of the vortices of which are no less than the distance between the electrodes within one sensitivity element, but no more than the distance between the electrodes belonging to different elements.
5. Conclusions
Based on the results of the work, we can conclude that the utilized scheme for separately collecting signals from the cathodes of electrochemical angular motion sensors does not introduce additional noise compared to the traditional scheme, which uses the difference in the cathode currents. In this case, it is possible to additionally store information about the phases of signals received from the different cathodes. For the cathode current noise, the phase behavior turns out to be nontrivial. For all the studied designs of the transforming element at low frequencies, the average value of the phase difference equals π, which coincides with the value obtained on the shake-table under impacts significantly exceeding the noise level. Physically, this result corresponds to the concept of the presence of a random integral fluid flow throughout the entire sensor channel. At higher frequencies, the cathodic noise currents become uncorrelated. In this case, the frequencies where the difference changes depend on the distance between the studied cathode. If the cathodes are located far from each other, the transition occurs at a frequency of around 5 Hz. For closely spaced cathodes, at a distance of about 150 µm, the phase difference changes at a frequency of about 15 Hz. The picture corresponds to the transition from thermo-hydrodynamic to convection-induced self-noise, while at frequencies from 5 Hz to 15 Hz, the main contribution to convection-induced self-noise is made by vortex flows with a size of at least 150 µm. In fact, the results of the work provide direct confirmation of the physical correctness of the currently developed ideas about the predominant nature of noise of these two types in electrochemical motion sensors.
The practical significance of the obtained results is that to increase the signal-to-noise ratio when using difference cathode currents, it is useful to increase the intercathode distance, which reduces the correlation between noise currents and reduces their contribution when subtracting signals. Another practical conclusion is the possibility of creating new methods for processing weak signals obtained using electrochemical motion sensors, based on processing the data obtained for each individual cathode, and identifying areas where the phase relationship for the cathode currents changes.
Author Contributions
Conceptualization, V.A.; methodology, V.A.; validation, A.S and A. Z.; formal analysis, A..S..; investigation, A.Z.; data curation, A.S.; writing—original draft preparation, V.A and A.S..; writing—review and editing, A.S.; visualization, A.Z.; project administration, V.A.; All authors have read and agreed to the published version of the manuscript.”
Funding
This research was funded by Russian Science Foundation, grant #22-29-00554.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Acknowledgments
This work was supported by the Russian Science Foundation, project 22-29-00554.
Conflicts of Interest
The authors declare no conflict of interest.
References
- V. I. Gorbenko, R. A. Zhostkov, D. V. Likhodeev, D. A. Presnov, and A. L. Sobisevich, “Feasibility of using molecular-electronic seismometers in passive seismic prospecting: Deep structure of the Kaluga ring structure from microseismic sounding,” Seism. Instruments, vol. 53, no. 3, pp. 181–191, 2017. [CrossRef]
- M. Vassallo, A. Bobbio, and G. Iannaccone, “A comparison of sea-floor and on-land seismic ambient noise in the Campi Flegrei Caldera, Southern Italy,” Bull. Seismol. Soc. Am., vol. 98, no. 6, pp. 2962–2974, 2008. [CrossRef]
- D. G. Levchenko, I. P. Kuzin, M. V. Safonov, V. N. Sychikov, I. V. Ulomov, and B. V. Kholopov, “Experience in seismic signal recording using broadband electrochemical seismic sensors,” Seism. Instruments, vol. 46, no. 3, pp. 250–264, 2010. [CrossRef]
- A. Krylov et al., “Ocean-bottom seismographs based on broadband met sensors: Architecture and deployment case study in the arctic,” Sensors, vol. 21, no. 12, 2021. [CrossRef]
- D. V Kostylev, L. M. Bogomolov, and N. V Boginskaya, “About seismic observations on Sakhalin with the use of molecular- electronic seismic sensors of new type About seismic observations on Sakhalin with the use of molecular-electronic seismic sensors of new type,” Sept. 2019 IOP Conf. Ser. Earth Environ. Sci., p. 324:012009, 2019. [CrossRef]
- A. L. Sobisevich, D. A. Presnov, V. M. Agafonov, and L. E. Sobisevich, “New-Generation Autonomous Geohydroacoustic Ice Buoy,” Seism. Instruments, vol. 54, no. 6, pp. 677–681, 2018. [CrossRef]
- D. Zaitsev, E. Egor, and A. Shabalina, “High resolution miniature MET sensors for healthcare and sport applications,” Proc. Int. Conf. Sens. Technol. ICST, vol. 2018-Decem, pp. 287–292, 2019. [CrossRef]
- J. Makris, J. Papoulia, and A. Tsambas, “A real-time seismic and tsunami network in the Kyparissiakos Gulf, Greece,” Boll. di Geofis. Teor. ed Appl., vol. 55, no. 2, pp. 561–587, 2014. [CrossRef]
- Koulakov et al., “Asymmetric caldera-related structures in the area of the Avacha group of volcanoes in Kamchatka as revealed by ambient noise tomography and deep seismic sounding,” J. Volcanol. Geotherm. Res., vol. 285, pp. 36–46, 2014. [CrossRef]
- R. Leugoud and A. Kharlamov, “Second generation of a rotational electrochemical seismometer using magnetohydrodynamic technology,” J. Seismol., vol. 16, no. 4, pp. 587–593, Apr. 2012. [CrossRef]
- F. Bernauer, J. Wassermann, and H. Igel, “Rotational sensors-a comparison of different sensor types,” J. Seismol., vol. 16, no. 4, pp. 595–602, 2012. [CrossRef]
- D. Zaitsev, V. Agafonov, E. Egorov, A. Antonov, and A. Shabalina, “Molecular Electronic Angular Motion Transducer Broad Band Self-Noise,” Sensors, vol. 15, no. 11. Multidisciplinary Digital Publishing Institute, pp. 29378–29392, 20-Nov-2015. [CrossRef]
- E. Egorov, V. Agafonov, S. Avdyukhina, and S. Borisov, “Angular molecular-electronic sensor with negative magnetohydrodynamic feedback,” Sensors (Switzerland), vol. 18, no. 1, 2018. [CrossRef]
- V. Agafonov, A. Neeshpapa, and A. Shabalina, “Electrochemical Seismometers of Linear and Angular Motion,” in Encyclopedia of Earthquake Engineering SE - 403-1, M. Beer, I. A. Kougioumtzoglou, E. Patelli, and I. S.-K. Au, Eds. Springer Berlin Heidelberg, 2015, pp. 944–961. [CrossRef]
- D. Zaitsev, V. Agafonov, E. Egorov, A. Antonov, and A. Shabalina, “Molecular electronic angular motion transducer broad band self-noise,” Sensors (Switzerland), vol. 15, no. 11, pp. 29378–29392, 2015. [CrossRef]
- D. L. Zaitsev, V. M. Agafonov, E. V. Egorov, A. N. Antonov, and V. G. Krishtop, “Precession Azimuth Sensing with Low-Noise Molecular Electronics Angular Sensors,” J. Sensors, vol. 2016, 2016. [CrossRef]
- Y. K. Cheung and H. Yu, “A Liquid Medium Coriolis Gyroscope based on Electrochemical Molecular Electronic Transducer for Low Angular Rate Sensing,” 7th IEEE Electron Devices Technol. Manuf. Conf. Strengthen Glob. Semicond. Res. Collab. After Covid-19 Pandemic, EDTM 2023, vol. 1, pp. 1–3, 2023.
- Y. K. Cheung and H. Yu, “Electrochemical Tilt Sensors with Symmetric Concentric Electrode Pairs,” IEEE Sens. J., vol. 21, no. 19, pp. 21322–21329, 2021. [CrossRef]
- Y. Hou, R. Jiao, and H. Yu, “MEMS based geophones and seismometers,” Sensors Actuators, A Phys., vol. 318, p. 112498, 2021. [CrossRef]
- A. S. Bugaev, V. M. Agafonov, and A. S. Shabalina, “Mathematical Model of the Hydrodynamic Noise in the Electrochemical Microsystems,” Proc. 2022 Int. Conf. Information, Control. Commun. Technol. ICCT 2022, 2022.
- N. Kapustian, G. Antonovskaya, V. Agafonov, K. Neumoin, and M. Safonov, Seismic monitoring of linear and rotational oscillations of the multistory buildings in Moscow, vol. 24. 2013. [CrossRef]
- V. Agafonov, A. Shabalina, D. Ma, and V. Krishtop, “Modeling and experimental study of convective noise in electrochemical planar sensitive element of MET motion sensor,” Sensors Actuators, A Phys., vol. 293, pp. 259–268, 2019. [CrossRef]
- V. Agafonov, “Modeling the Convective Noise in an Electrochemical Motion Transducer,” Int. J. Electrochem. Sci., vol. 13, p. 11442, 2018. [CrossRef]
- Shabalina, and V. M. Agafonov, “Design and Self-Noise of MET Closed-Loop Seismic Accelerometers,” IEEE Sens. J., vol. 17, no. 7, pp. 2008–2014, 2017. [CrossRef]
- V. A. Kozlov and A. V Kharlamov, “Dynamic properties of an electrochemical cell under parametric pumping,” Russ. J. Electrochem., vol. 34, no. 2, pp. 174–180, 1998.
- E. V. Egorov, I. V. Egorov, and V. M. Agafonov, “Self-Noise of the MET Angular Motion Seismic Sensors,” J. Sensors, vol. 2015, pp. 1–5, 2015. [CrossRef]
Figure 1.
Sensor circuits with one (a) and two (b) sensitive elements. The applied external acceleration leads to inertial motion of the liquid (electrolyte) inside the channel, which, in turn, causes a change in the concentration of the active charge carrier near the electrodes and, thereby, leads to changes in the currents on the electrodes.
Figure 1.
Sensor circuits with one (a) and two (b) sensitive elements. The applied external acceleration leads to inertial motion of the liquid (electrolyte) inside the channel, which, in turn, causes a change in the concentration of the active charge carrier near the electrodes and, thereby, leads to changes in the currents on the electrodes.
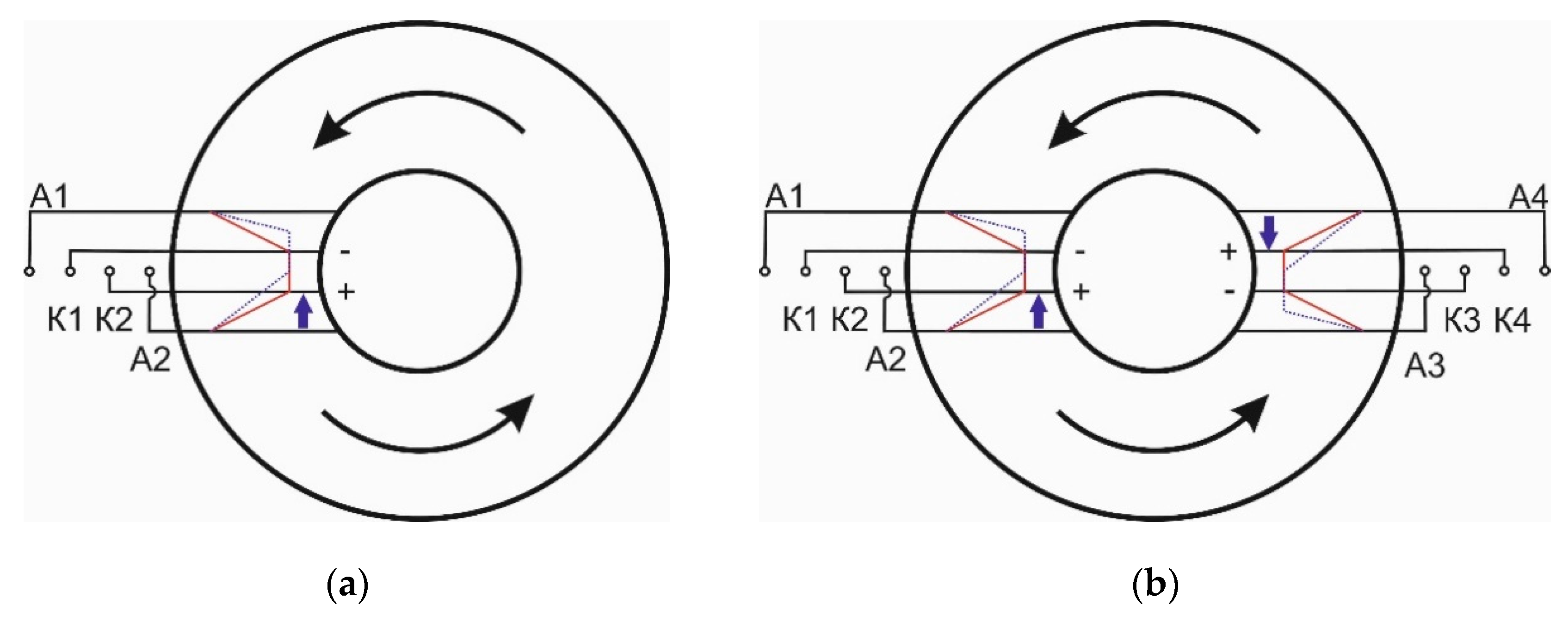
Figure 2.
Electronic circuit for cathode current conversion.
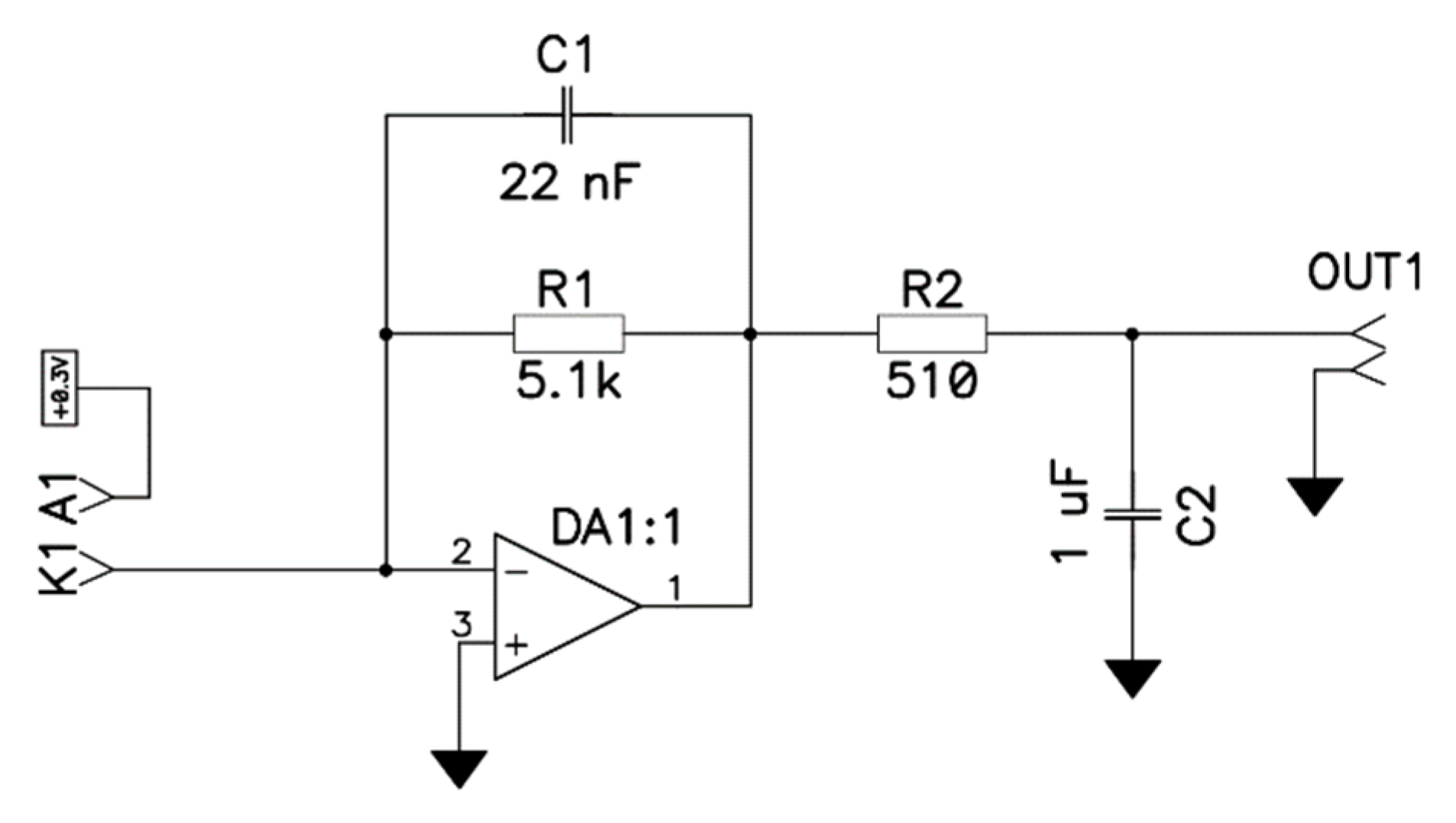
Figure 3.
Diagram of signal registration from cathodes.
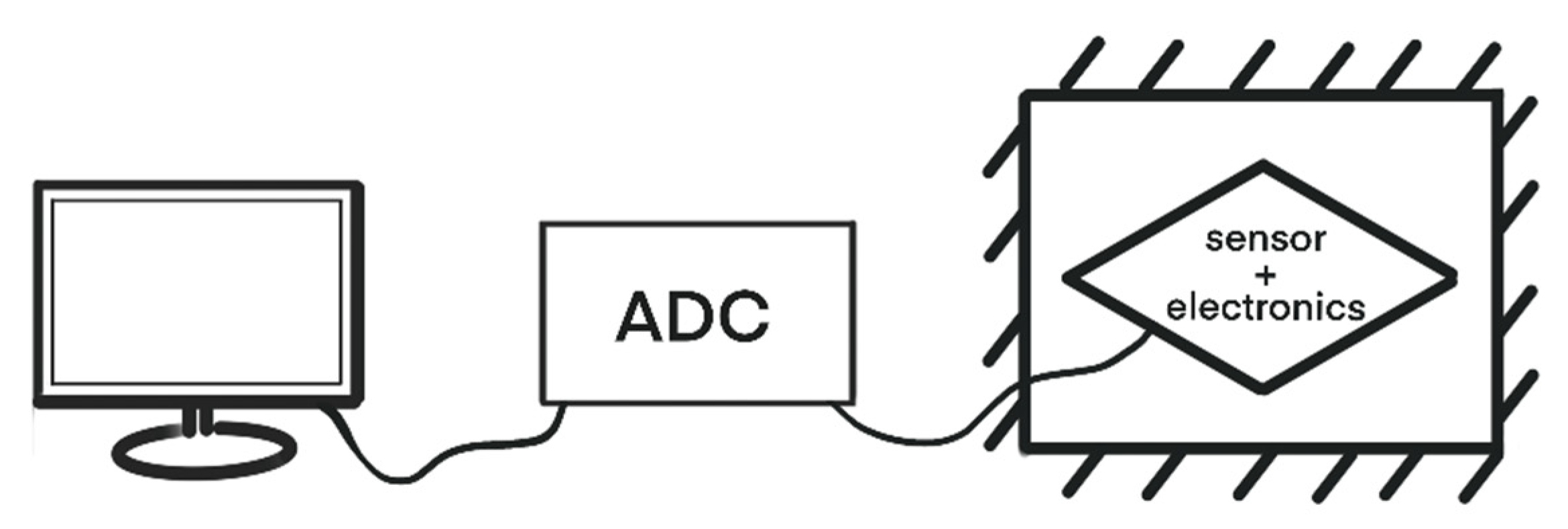
Figure 4.
Amplitude-frequency response of signals from cathodes for a sensor with one sensitive element (a) and with two sensitive elements (b).
Figure 4.
Amplitude-frequency response of signals from cathodes for a sensor with one sensitive element (a) and with two sensitive elements (b).
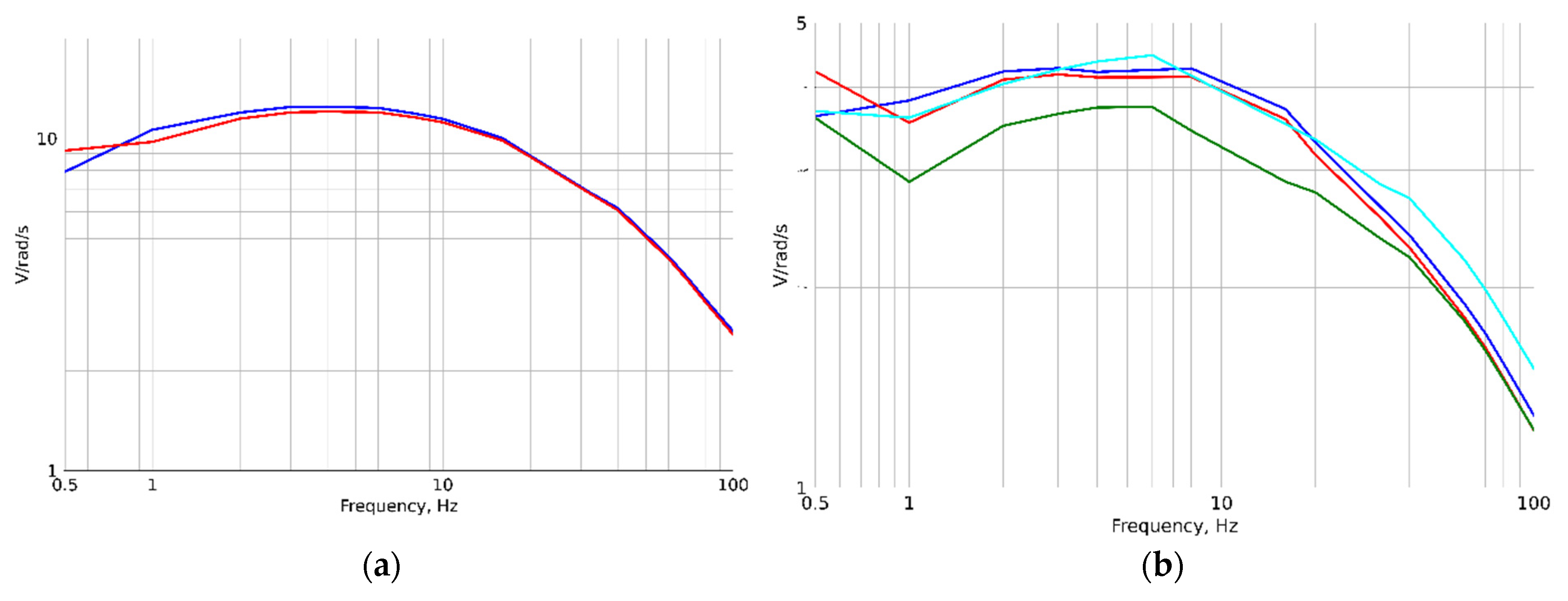
Figure 5.
Phase frequency response of signals from cathodes for a sensor with one sensitive element (a) and with two sensitive elements (b).
Figure 5.
Phase frequency response of signals from cathodes for a sensor with one sensitive element (a) and with two sensitive elements (b).
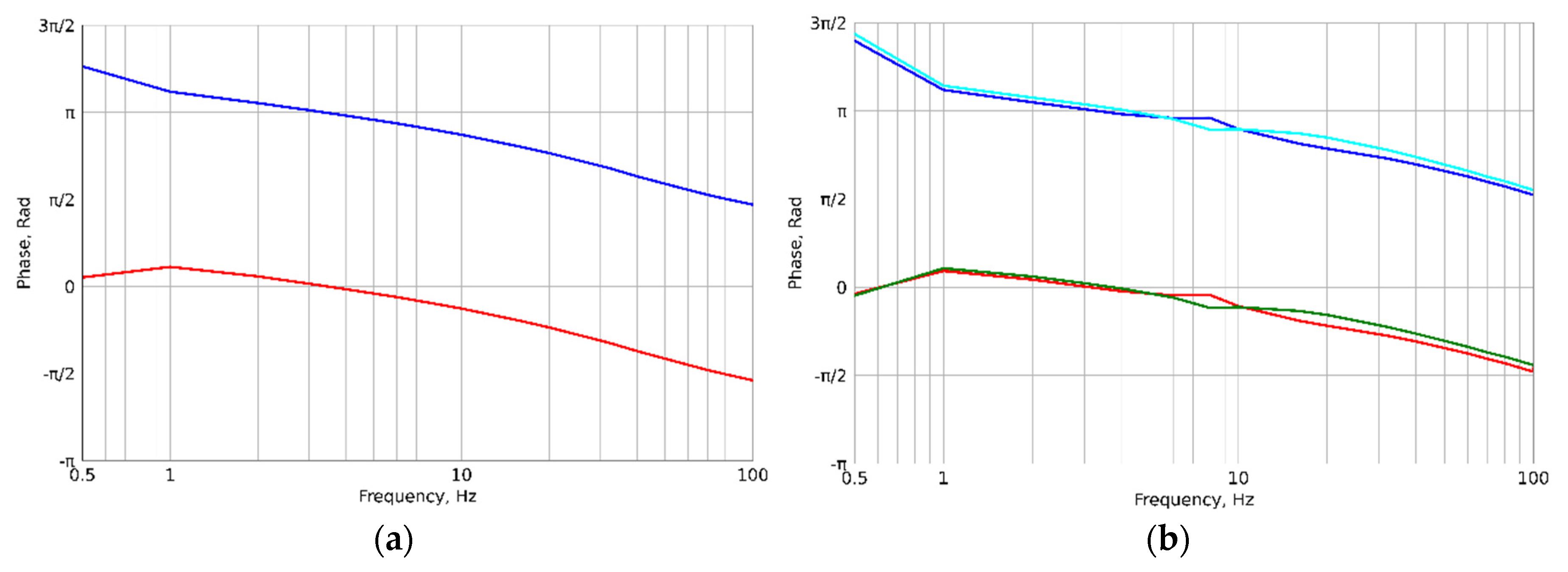
Figure 6.
Spectral noise density in units of angular acceleration (sample 1).
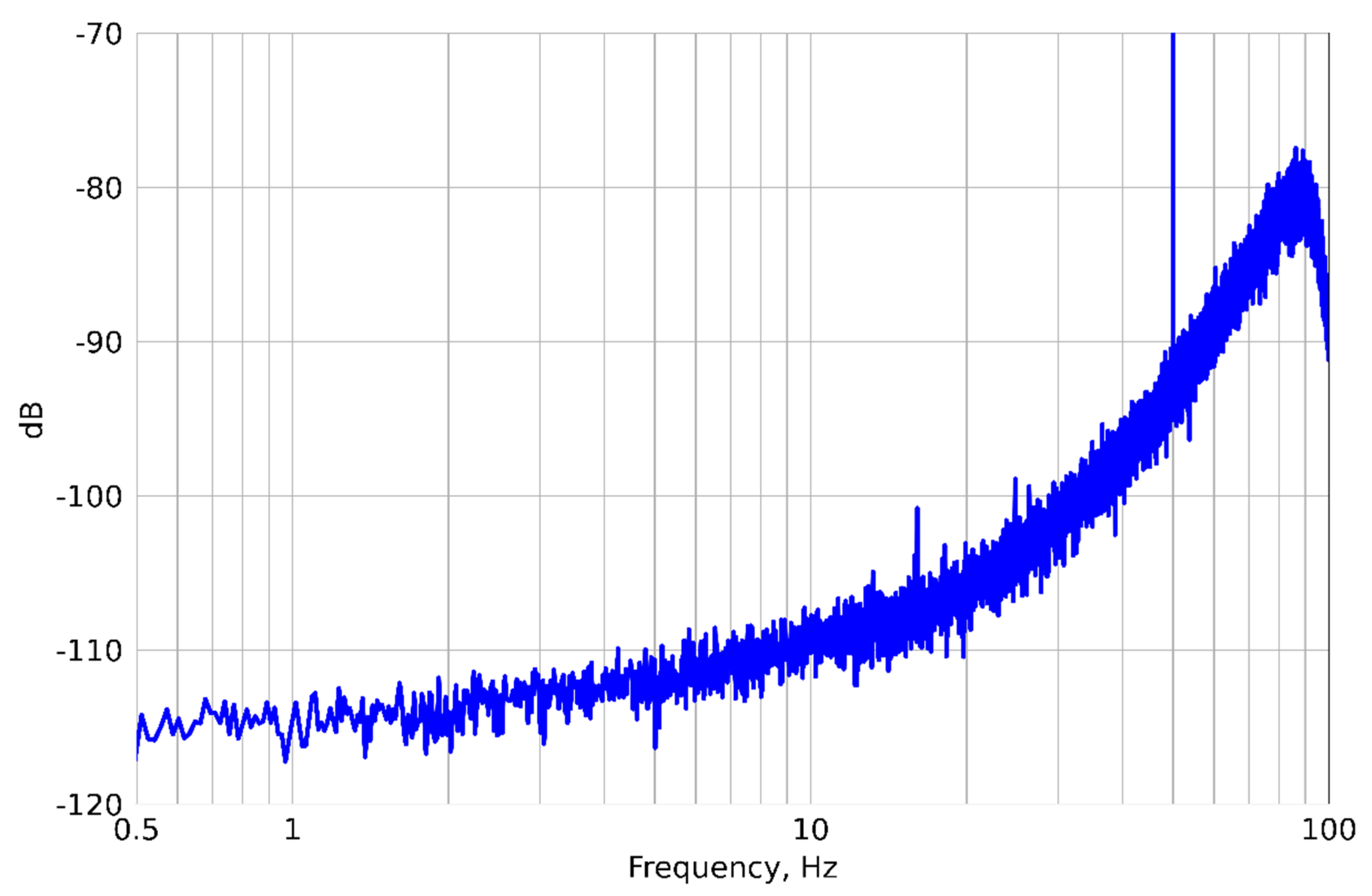
Figure 7.
Spectral noise density in units of angular acceleration (sample 2).
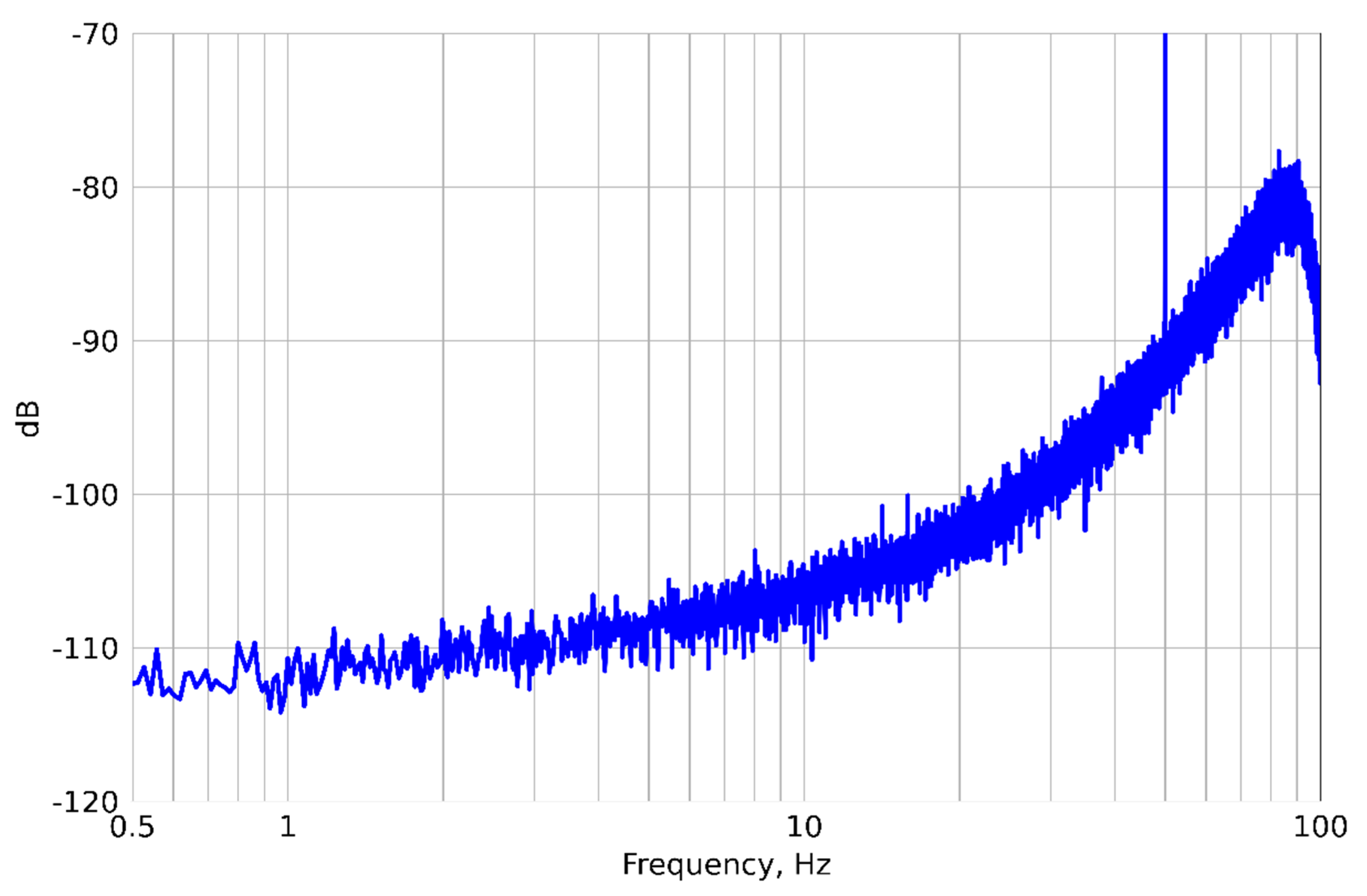
Figure 8.
Phase difference of noise signals from the cathodes for the sensor with one sensitive element (sample 1).
Figure 8.
Phase difference of noise signals from the cathodes for the sensor with one sensitive element (sample 1).
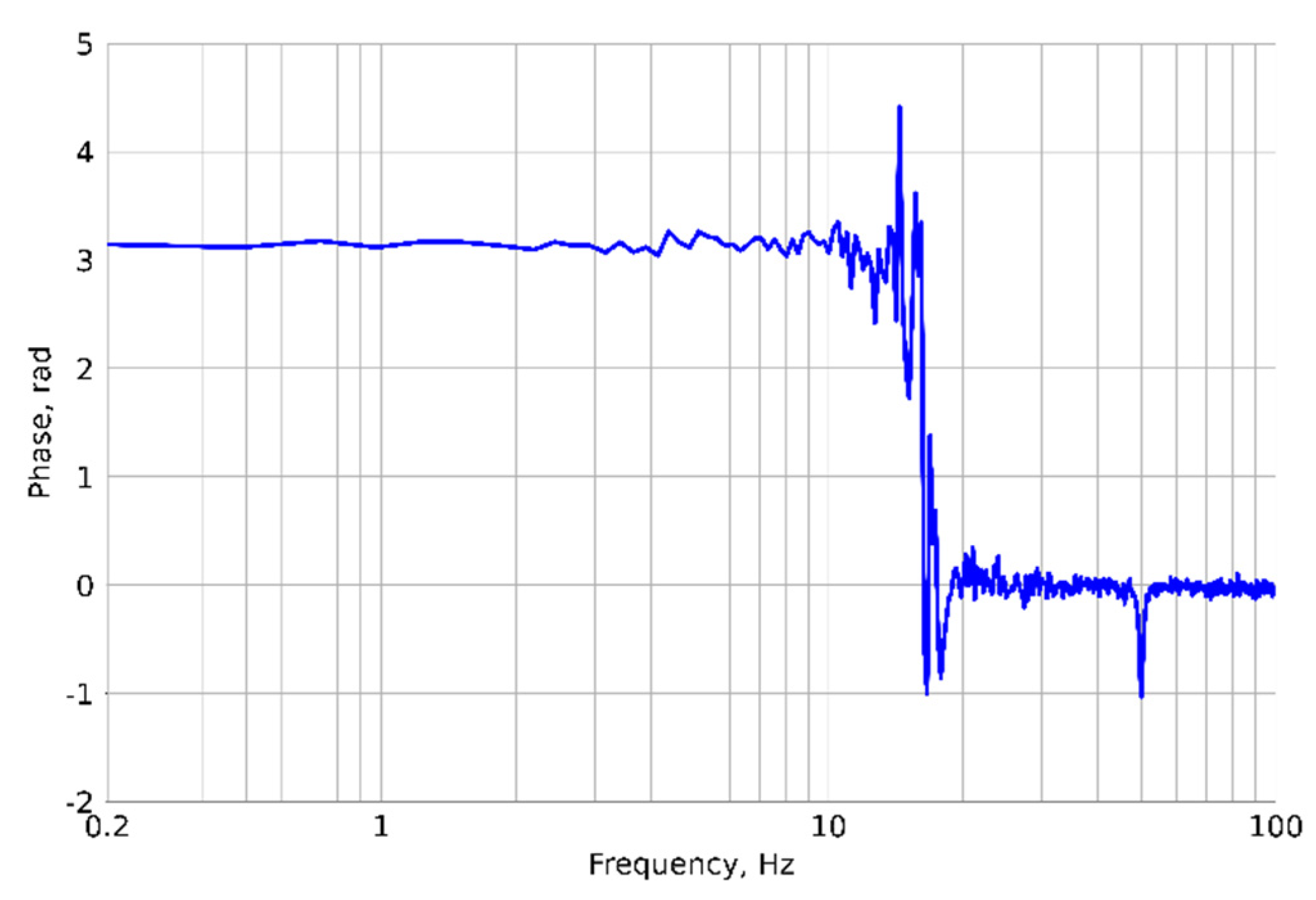
Figure 9.
Phase difference of the noise signals from the cathodes for the sensor with two sensitive elements (the red curve is the phase difference between the cathodes in different sensitive elements (K1 and K4), the blue curve is the phase difference between the cathodes within one sensitive element (K1 and K2)).
Figure 9.
Phase difference of the noise signals from the cathodes for the sensor with two sensitive elements (the red curve is the phase difference between the cathodes in different sensitive elements (K1 and K4), the blue curve is the phase difference between the cathodes within one sensitive element (K1 and K2)).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



