
Submitted:
20 December 2023
Posted:
21 December 2023
You are already at the latest version
Abstract
Over the last few decades, there is a remarkable increase in air traffic worldwide; however, despite of rapid technological development and improved airport infrastructure, there is still an increasing number of aviation accidents and fatalities. In order to meet safety demands of Air Traffic Control (ATC), Machine Learning (ML) based aircraft conflict detection techniques are focused to predict events before they come to reality. This research presents a systematic literature review (SLR) about the applications of ML techniques in safety prediction of ATC system. Initially, the existing aircraft conflict prediction models are classified into three broad categories; logical, geometric and probabilistic. A formal process of SLR is then conducted which is initiated with preprocessing and effective searching. A series of filtering called title, abstract and objective-based are then applied to extract the most relevant articles. Detailed and critical reviews of selected articles are performed to identify challenges which are segregated into dataset, model and evaluation techniques, furthermore, the optimal solutions for each are proposed. Finally the matrices to map the identified challenged with their proposed solutions are constructed. This research serves as a foundation for future research and towards integration of ML based safety prediction techniques into modern ATC system.
Keywords:
aircraft conflict prediction
; machine learning
; safety
; air traffic control
1. Introduction
Air traffic control (ATC) is a ground-based service which provides supervision to an aircraft within controlled airspace. Around the world, the basic objective of ATC systems is to maintain safe separate between aircrafts to avoid collisions, to manage and increase an efficient flow of air traffic, and to provide help and support information to pilot. From takeoff till landing, aircraft pilots maintain communication with air traffic controllers who provide necessary guidance and recommendations within its assigned area of airspace about flight, ascent and descent paths and relevant information about weather conditions as shown in Figure 1(a). When an aircraft flies to the airspace boundary, its control is delegated to the next controller through the process of handover. This process continues until aircraft’s control is handed over to the controller of destination airport.
The ATC system is becoming more complex with the continuous growth of air traffic and the evolution of aircrafts with different operational attributes. The International Civil Aviation Organization (ICAO) is a specialist bureau of the United Nations constituted in 1944 is now a consortium of 193 nations is and it defines international safety, environmental and operating standards for civil aviation [34]. According to the safety report released by ICAO in 2023, the number of flight departures for scheduled commercial operations increased by approximately 11 per cent with around 25 million departures in 2021, as compare to around 22.5 million in 2020. It shows a big increase in number of aircrafts.
Further, ATC is a safety critical system that can result in injury or loss of life if it fails or malfunctions in order to avoid casualties or loss of life, and to prevent environmental and financial damages. Figure 1(b), published in ICAO current safety report, shows over the previous five years there exist the global accident rate trend (per million departures), with 2021 having an accident rate of 1.93 accidents per million departures, a decrease of 9.8 percent from the previous year [34]. The highest count with 114 accidents was recorded within this period in 2019. However, the number of accidents significantly decreased in both 2020 and 2021; but it is worth noting that during these two years there was a significant decrease in traffic of passengers and flights due to measures placed by governments aimed at minimizing the spread of COVID-19. The number of fatal accidents per year remained the same in 2020 and 2021 which shows that the risks associated with aviation, related to, or in direct support of the operation of aircraft, remained constant and are not controlled to an acceptable level.
Furthermore, ATC is a challenging system which is influenced by many external factors such as political, legislative, economic, technological change, weather, cultural norms and vendors. It is required to provide constant monitoring in order to establish highest levels of aircraft safety. Moreover, the manual safety systems implemented at many airports of the world are time consuming and lack the ability to make efficient intime decisions about flight [11]. Many problems and challenges are faced by them such as air traffic congestion, flight safety failures, increased delays and higher costs [12]. The safety of aviation industry for all stakeholders cannot be ensured without a formal process.
Aviation safety is concerned with the knowledge and practice of risk management in aviation. The primary objective is prevention of aircraft accidents and incidents which is achieved through training of air travel personnel, research, guidance to passengers and the general public, as well as improvements in aircraft and aviation infrastructure design. However, the complexity of airspace is increasing rapidly due to higher number of emerging aircrafts such as drones and unmanned aircraft those need to be accommodated along with scheduled flights. In order to ensure flight safety, collision detection techniques are widely used which computes the time impact by identifying intersection points of two or more object. One such system is Traffic Alert and Collision Avoidance System (TCAS) which gives information to the pilot about the nearby aircraft and it serves as a safeguard against mid-air collisions [35]. TCAS is a reactive system as it detects collision at runtime but nowadays aviation industry is transitioning from a reactive risk management strategy to proactive risk management in order to forecast a safety risk before occurring. Therefore, the basic objective aviation service providers of aviation safety is defined as to attain the capability to predict unsafe events and to prepare counter strategies for risk mitigation whenever risks are encountered.
Machine Learning (ML) is an effective technique that uses mathematical models of data in order to make computer learn without direct human instructions and it also allows a computer system to learn continuously based on its experience. The algorithms used in ML are based on statistical methods and are applied to make classifications or predictions which subsequently enhance effective decision making process [33]. ML is rapidly gaining importance in various fields of life such as data science, medical diagnostics, computer vision, internet search engines, voice recognition, spam email detection, statistical data analysis etc.
There are several applications of ML in ATC to automate its operations, lower expenses, provide safety, and improve customer experience. Following are few of them.
- predict congestion in air traffic and recommend alternative routes to minimize delays through analyzing aircraft real-time flight data, weather conditions and other contributing factors.
- compute accurate quantity of fuel required for the complete flight through identifying and processing flight data such as route lengths and altitudes, aircraft type and weight, weather, etc.
- predict probable maintenance faults before they occur, detect potential issues using data from in-service aircraft.
- provide optimal dynamic sector configuration by analyzing data on traffic volume, weather conditions, terrain, and other factors and then determining the most efficient sector boundaries.
The main component in ML is models which learn from given data and gives solution to a problem. There exist a large number of ML models used in domain of ATC which are applied depending on the diverse nature of tasks to be solved. The three broad classifications of ML models for ATC system which are found in literature are; Logical, Geometric and Probabilistic Models as shown in Figure 2.
1.1. Logical Models
The type of ML models which can be easily transformed into human understandable rules those are easily assembled in a tree structure, also known as a feature tree. Decision trees are specialized form of feature trees in which leaves are labelled with classes. In ATC system logical models are used in [15,17,26].
1.2. Geometric Models
Geometric models also referred as feature learning is a ML model that integrates computer vision in order to solve visual tasks and works on the principle of similarity by focusing instance space’s geometry. Features are described as points in two (x and y axis) or three (x, y and z axis) dimensional space and even non-intrinsic features are also modeled in a geometric manner. The primary benefit of geometric models is that they provide effective visualization within two or three dimensional space. Geometric models are categorized into two types.
1.2.1. Linear Geometric Models
Linear models are the category of geometric model that is developed in instance space directly, by using concepts of geometric such as lines or planes in order to partition the instance space. There are a variety of linear models applied for the tasks of prediction, including classification, probability estimation and regression. In ATC system linear models like the least-squares method (a mathematical regression analysis) is used in [2], Support Vector Machine (which best segregates two or more classes using a hyper-plane) is used in [25].
1.2.2. Distance Based Geometric Models
Distance based models are the category of geometric model that shows similarity between instances by using distance as metric such as Euclidean, Minkowski, Manhattan, and Mahalanobis. In this technique the most similar training instance which has smallest distance from instance to be classified is retrieved from memory and training instance class is assigned to the new instance. In ATC system few basic distance based models are k-nearest neighbor (calculating the cluster means and reassigning points to clusters) is used in [22] and Hierarchical clustering, algorithm that builds hierarchy of clusters is used in [26].
1.3. Probabilistic Models
A probability model is a category of ML model which works on the theory of probability as future events predictions is associated with randomness. In this model the variables we know about is denoted as instance’s feature values and the target variables we are interested in is denoted as instance’s class. A well-defined but unknown probability distribution is applied with the assumption that there exists some underlying random process which generates the values of these variables. Naive Bayes is a widely used Probabilistic model whereas in ATC system Probabilistic models like Bayes theorem is used in [4,7,8,11,12,20].
In this research a comprehensive systematic literature review (SLR) is conducted on aircraft conflict prediction by using Machine Learning techniques. There exist some SLR regarding various dimensions of ATC system which are summarized in Table 1. In Table 1 we cover the objectives and problems addressed in existing surveys of ATC. However, main contributions of this research are as follows:
- a critical review is performed to analyse the problems in state-of-the-art techniques aircraft conflict prediction.
- challenges are identified in three perspectives namely dataset, model and evaluation techniques.
- the optimal solutions are proposed and identified challenges are mapped with them to form a matrix.
2. Systematic Literature Review
A systematic literature review examines data and findings of other authors relative to a specified research question or questions. A systematic literature review is just one research methodology that can be used to do this. Systematic reviews (SRs) identify, collate, and systematically summarize empirical evidence from two or more primary research studies. The following activities are performed to conduct SLR in this research as shown in Figure 3.
2.1. Keywords Identification
The terms to be searched are called keywords. There is a need to take account of all selected keywords. In criteria defined for this activity is shown in Table 2.
2.1.1. Broader/Narrower Terms
A keyword is termed as narrow if it is concrete while it is broader if a keyword can be further narrow down into some other narrow keywords. For example, "Electronic gadget" is a broad term and cell phone, tablet computers and ipads, earthquakes, floods, hurricanes are its narrower terms. In this research we have selected narrow keywords as shown in Table 1. For “safety”, “prediction” and “control” whereas “air traffic” can be narrow down as “airport”, “airspace”, “terminal”, “apron” areas etc but we have focused only on terms related to “air traffic”.
2.1.2. Synonyms/Near-Synonyms
There should be a relevancy between selected synonyms, such as workers, employees, personnel. In this survey three synonyms are identified for each keyword which are selected on close relevance as shown in Table 1.
2.1.3. UK/US English
These are two variations in spellings of a keyword. For instance, in UK English we spell “colour” and we write “color” in USA. We have focused on UK English because it is a standard for technical write ups like research articles.
2.1.4. Terminology Change over Time
Some keywords get changed with the passage of time. For instance, "Bipolar disorder" is earlier referred to as "Manic depression". There is no such word in our research problem
2.2. Truncation
Truncation also called as stemming is a process of inserting the stem of a keyword and a truncation symbol so that we can retrieve other forms of the keyword. Table 3 shows the results of truncation on identified keywords.
2.2.1. Pruning
It is the process in which certain words like propositions, ‘ing’, ‘ed’ are trimmed from the keywords. For example, “safety” will become “safe” etc.
2.2.2. Wild Card
Wildcard is a character that signifies specific meaning to the search engine. For example: “safe*” will retrieve “safety”, “safely”, “safest” etc. where * is a wild card. In this research wildcards are used on selected for effective search of relevant research articles.
2.2.3. Proximity Searching
By enclosing words into double quotation indicates searches for that exact phrase, for instance "Air Traffic".
2.2.4. Boolean Operators
In searching a database, the Boolean operators AND, OR and NOT are applied to combine terms. We first search for individual keyword and then move to the search history and combine the results using Boolean operators. In this research AND operator is used to fetch all relevant researches containing all keywords a shown in Figure 4.
2.3. Strings Formation
After defining keywords next step is the formation of substrings. Table 4 shows the strings which are formed by making combinations of the keywords.
2.4. Databases Selection
The selection of databases to be searched is an important step for collection of relevant research articles. This activity comprises of following steps.
2.4.1. Determine Databases
The following highly-ranked five databases are searched in this research.
- IEEE
- Elsevier
- Springer
- ACM
- mdpi
2.4.2. Explored Pages
For each input string first three pages of each database is searched.
2.4.3. Time Range
Three folders are created in Zotero for downloading researches of years 2020, 2021, 2022, 2023.
2.5. Searching
The next step is to execute searching, once strings are ready. All relevant papers are downloaded in Zotero in respective folders year-wise as shown in Figure 5. During this activity the following steps are performed by us.
2.5.1. Inclusion/Exclusion Criteria
The following inclusion/exclusion criterion is defined for this survey.
- Only those articles are downloaded those must have all keywords of a string
- Articles published before 2020 are not considered
- The articles for which only citation is available are not considered.
- Paper less than 4 pages
- Articles not in English
- Dissertation and thesis are not included
2.5.2. Field Selection
The number of articles retrieved by a search clause depends on fields selected in a database. Following options are available for field selection.
- All fields: The selected keywords may appear in any field. This will return a high number of results.
- Title/abstract: If keywords appear in the title and abstract, the item is likely to be highly relevant. This research relies on well written, descriptive titles and abstracts.
- Keyword: Searches for defined keyword in the author supplied keywords.
In this research all field option is selected so that any relevant paper does not get missed. The following Table 5 shows the details of searching which is performed in this research. So far we have downloaded 798 articles in folder 2023, 119 articles in folder 2022 and 119 articles in folder 2021.
2.6. Title-Based Filtering
It is the first stage of filtering which is called title-based filtering, as shown in Table 5 which is diagrammatically represented in Figure 6. All papers which are not relevant to the topic of the problem are excluded from folders created in Zotero. Since the number of papers relevant to the research questions is very high so it is hard to track them manually, therefore, we have made an excel file as shown in Figure 4. The papers having occurrences of 3 keywords are selected as they are most relevant to our research whereas all other papers are excluded.
2.7. Abstract-Based Filtering
In the second level of filtering, abstract-based filtering is conducted. All the papers in which the abstracts are irrelevant to the problem are excluded from all the selected databases as shown in Table 5. Following is the exclusion criteria defined for this filtering.
Paper length less than 6 pages, spacecraft and aircraft, performance-shaping factors , mental workload, reaction, training, flight delay prediction, flight planning, signal processing, traffic flow prediction, trajectory prediction, situation awareness, airspace sectorization, staffing, disaster management, aeronautical communications, unmanned aircraft and drones, feasibility study, tutorial, survey, views and reviews, comparative studies, answering open questions, cognitive analysis, physiological studies , social sciences studies, conflict distribution and resolution , prediction of aircraft go-around, flight scheduling, cultural studies, road and railway network and anomaly detection.
2.8. Objective-Based Filtering
2.9. Detailed Literature Review
A hybrid model that uses deep learning is proposed in order to predict aircraft coordinate in [1]. The Automatic dependent surveillance-broadcast (ADS-B) real-world datasets from OpenSky network is used. In methodology, the spatial features from dataset are extracted by using inception modules and to extract temporal the spatial features from dataset LSTM modules are used. The experimental results describes that the proposed model is the local optimal model and the positioning reliability is guaranteed. The limitation is that for coordinate prediction ADS-B signal strength is used which is difficult to be interfered but it conveys limited information.
The research work in [2] predicts trajectories of the aerial vehicles by a grouping-based conflict detection algorithm which is a based on ML. The preprocessed ADS-B dataset is used in this research. In methodology short-term, mid-term, and long-term trajectory predictions are made by using the models LSTM, CNN and LS in order to increase timeliness of aircraft conflict detection. The results disclose a greater accuracy in short-term as compare to mid-term and long-term trajectory predictions. Further, in all prediction tasks LSTM-based model demonstrated higher performance than CNN-based and the LS-based methods. The limitations are that the problem is that performance of the conflict detection algorithm is affected by performance drop down that is observed in case of mid-term and long-term trajectory predictions. The future work will focus on solution of aforementioned limitations by targeting design of efficient neural networks and inserting large amount of useful data in training dataset.
Stanley in [3] focuses on the prediction of time-to-fly from the turn onto the aircraft final approach course to the threshold while maintaining separation between landing aircrafts. The flight track dataset is used which consists of six months arrivals and departures data to/from a main European airports facilitating 400,000 flights per year. This methodology is based on QRF model that can provide uncertainty measure in a prediction result either by means of a prediction interval or by making a probability distribution over the dependent variable. The results highlight quality of the model which is measured in terms point estimate accuracy, furthermore, some model error measures are examined through probability prediction. The limitations are that this approach (i) focus only on how to generate suggestions about time-to-gain/time-to-lose from the predictions based on trade-off between two scenarios which causes a decrease in capacity utilization, (ii) Considers only two factors i.e., the current state of an aircraft and weather and (iii) the application of QRF model on an input of variable length of time-series is yet to be explored. The future work is (i) to extend the capabilities of this model to generate suggestions for ATC commands through application of advanced ML techniques and (ii) to increase accuracy and precision of the prediction by considering the feature of track history and by considering correlations between multiple aircrafts in the sequence.
The research in [4] predicts the number of losses of separation between aircraft in European Air Traffic Management systems by using variables such as the number of flight hours or the complexity of the airspace. In methodology, a predictive approach based on Bayesian inference is developed and four additional models are constructed which integrate hierarchical approach with a regression model. The common rate of occurrence of separation minima infringements (SMI) and specific rates of occurrence for each air navigation service provider (ANSP) are predicted by using the developed models. The dataset used in this research is formulated from the data gathered from a number of European institutions those are involved in monitoring the performance of ATM systems. The results show the Poisson model is more efficient for small values of SMIs whereas normal models are more accurate for high values of SMIs. The limitations are that (i) the identification of parameters those are important for safe operation of specifically ATM system and generically for whole European system and (ii) the identification and quantification of trends and streamline benchmarks in order to compare current and previous year’s performance.
In the research work [5], a risk assessment model and system operation safety warning is developed which is based on deep learning algorithm. Quick Access Recorder (QAR) dataset is used which contains the data of various aircraft system’s operating status. The methodology integrates characteristics of QAR data andwith aircraft system failures, the failure mode and impact analysis (FMEA), cause chain analysis (CCA), LSTM, and other methods. The purpose is to primarily predict risk and its severity in aviation system through identification of risks caused due to system failure and further to predict flight trend parameters. The results are obtained by a case study of the Aircraft Refrigeration System (ARS), the validation of safety risk warning model is conducted in order to calculate the risk level that may face and hazard sources of civil aircraft operation is identified in order to improve the safety level of civil aircraft operation. The limitations are (i) there is a need to address time-constrained dynamic risk analysis, and (ii) the correlation between failures and its empirical value needs to be analyzed.
In [6] a flight conflict prediction model which uses stochastic differential equation and Monte Carlo method in order to enhance safety in route area and terminal area. In the methodology, the safety zone around an aircraft is selected to be ellipsoidal, the stochastic differential equation is applied to predict aircraft position and the probability of flight conflict in terminal area is computed by using Monte Carlo method. Different scenarios are simulated based on different characteristics of the route area and the terminal area then simulation experiments are conducted to detect flight conflicts. The results of experiments revealed that the flight conflict probability of proposed method shows high accuracy which guarantees the applicability of proposed model practical field. The limitations are that only the factor of wind influence is considered in this study while incorporation of more factors ad their correlation is left as future work.
A predictive methodology is presented in [7] which is based on the definition of models called Safety Performance Functions in order to define airspace safety as a measure of SMI between aircrafts in en-route phase. The main dataset used in this study comprises of structured data of contextual information about all aircrafts and their trajectories in airspace, including rare instances in which loss of separation occurred obtained from CRIDA Data WareHouse. A conceptual framework based on Bayesian Inference is presented which integrates conflict causal factors with SMI precursors acquired from available dataset. The results are obtained by using sensitivity analysis in order to identify the variable that has most influence on violation of ATM safety barriers which can result an occurrence of SMI. The limitations are (i) only high relevance variables such as instantaneous demand or occupancy of a sector are considered, (ii) variables related to aircraft operation, such as changes in flight level or flight speed and heading, are yet to be explored, and (iii) the factors like controller’s workload and controller’s response time to deal with conflict also need to be explored.
Yingxiao et. al. in [8] develop a model based on ML in order to predict the touchdown vertical speed numerically during landing of an aircraft. Sample Flight Data belonging to DASHlink is used as a dataset. In methodology, the touchdown vertical speed is predicted by a trained Bayesian recurrent neural network which is further applied to quantify the factor of uncertainty in model prediction that facilitate decision-making process. The results are obtained by checking model predictions on several flights in the test dataset and computation results reveal that proposed approach demonstrates satisfactory performance. The limitation are (i) only a particular airport is considered for construction of Bayesian deep learning model whereas different runways are govern by different operational procedures and regulation rules, (ii) a single runway is considered which is not adequate for available data while different runways have different configurations even within the same airport, (iii) data of only one aircraft type is considered whereas performance of aircraft is different for different aircraft types, (iv) the feature of gross weight is not available in dataset while reference speed is not possible to estimate without it, and (v) the model shows poor performance in case of inadequate data whereas a data-driven model deals with various factors such as environmental conditions and pilot operations. As a future work there is a need of a hybrid model in order to integrate physics modeling and actual data which is to be investigated.
In [9], a framework is presented that incorporate human factor in predicting risk involved in air-ground speech communication with the objective to improve air traffic safety. In the proposed framework, real-time traffic airspace dynamics is fetched which is given as input to automatic speech recognition and the spoken instruction understanding techniques. In this research a prototype application is designed which is deployed in the Chengdu area control center, Changsha aerodrome and approach, China and it predicts safety-critical risks of air-ground communication such as readback confirmation, normative instruction check, trajectory conformance, and potential aircraft conflict detection. The results and data statistics are collected from real-world environment which shows that the proposed framework has a potential to enhance air traffic safety as well as it minimizes air traffic controllers workload through automatic understanding of air traffic dynamics. The limitations of this research are (i) currently the presented approach exhibit good performance which can be further improved through application of solid dynamic sensing and (ii) to increase practical applicability of proposed approach, front user’s feedback can also be incorporated.
Seyedhamed in [10] presents an approach to predict conflict between two aircraft observing flight at the same altitude level by using mid-term probabilistic technique. The methodology describes probabilistic relative position of an aircraft as a Gaussian process while considering the factor of fully correlated wind field and the accuracy of conflict prediction is also calculated. Numerical results are obtained by using simulator that incorporates a fully correlated wind field model and parameter’s sensitivity is calculated. Results reveal the effectiveness of presented algorithm as it computes the safety while maintaining a defined accuracy level. The limitations of this study is that (i) the estimation error increases in case an aircraft exhibit sharp turns because of variation in small heading and (ii) non-Gaussian wind models can also be investigated in order to calculate relative position of an aircraft.
The research in [11] develops a probabilistic simulation methodology for detecting lateral separation violations in en-route safety assessment of multiple aircraft flying within an airspace sector over a particular duration while considering the multiple factors of uncertainty. This study uses FlightAware's public ADS-B database which consists of historical trajectory about position of an aircraft flying over Houston air traffic sector containing information such as altitude, latitude, longitude, course angle and true air speed, at a sampling rate of 16 s. The methodology makes use of two prediction models known as kinematics-based Generalized National Airspace Trajectory-Prediction System (GNATS), and the dynamics-based Base of Aircraft Data (BADA) in order to find trajectory and devise aircraft dynamic model which also include model error as an input. The recorded flight data is used by a Bayesian state estimation and the discrepancy is observed. The results demonstrated that proposed approach exhibit low computational burden which shows its practical applicability in real world. The future work includes in flight monitoring of aircraft online and to detect probabilities of separation violation for rest of the flight based on its trajectory. Also different conflict resolution techniques can further be evaluated by using proposed approach.
The article in [12] deals with the ability of an air traffic controller in prediction of aircrafts conflict before they violate SMI. The data used in this study is obtained from Air Navigation Services Provider (ANSP) and data comprises of knowledge and real operational of aircrafts. In methodology, Bayesian Inference technique is applied because of its strong feature to give high prediction in case of low probability events by using existing data and knowledge. For results of proposed conflict prediction approach, the sensitivity analysis is conducted through air traffic controllers in order to identify which precursor gives best description about safety events.
The research in [13] presents a digital system for assistance of pilot in prediction of air conflicts and it gives a platform for effective flight safety awareness through utilizing aircraft surveillance data. The dataset used in this study is large-scale which comprises of real time air traffic data including aircrafts conflicts data as well. In methodology, a widely used successor of recurrent neural networks (RNNs) called long short-term memory (LSTMs) networks are applied, in order to find the air traffic monitoring capabilities in terms of their time-based dynamic behavior and also in classification of error patterns. Numerical The results are obtained by utilizing proposed LSTM networks in order to detect various weather events, cyberattacks, emergency situations and human factors. The limitation is that it predicts conflicts in sequential flight data.
A conflict prediction tool is presented in [14] which detect SMI between pairs of aircraft. This data-driven approach proposed in this study extracts aircraft trajectory data from the OpenSky Network which provides real world ADS-B flight trajectories. In methodology, extreme gradient boosting is applied which is a widely used ML model for classification and regression. The results are obtained by applying several techniques such as the number of samples, the rate of error of predictions and tendency of ML algorithm.
The article in [15] introduces an ATC conflict prediction tool which is based on ML in order to detect SMI between aircrafts flying within airspace. This data-driven approach extracts ADS-B trajectories data from the OpenSky Network, the historical ADS-B trajectories work as 4-Dimensional Trajectory (4DT) predictions to be used as inputs for the database. The methodology makes use of two ML algorithms for classification and regression in order to predict potential conflict. The results demonstrate that the ML algorithms performs well and predicts conflicts with high-accuracy metrics. The limitations of this research are (i) certain variables like operational and environmental variables are not focused, (ii) the Deep Learning approach which is based on neural networks may be applied and (iii) other data sources may be used as an input for 4DT conflict predictions.
The authors in [16] proposed an approach which extracts data from aircraft Safety Reports automatically which is given as input to the Data-Driven Model that predicts whether pilot air traffic controller or both contributes in an incident when loss of separation occurs.
The research in [17] developed conflict detection and resolution framework for for conflict prediction in 4DT. This research uses data acquired through Trajectory Predictor which comprises information from most of the Brazilian air traffic. In proposed methodology the routes are represented as trajectories and then conflicts are predicted based through Decision Tree Pruning Method which manages large amount of input data effectively. The comparison results with other counterparts revealed the effectiveness of developed model in aircraft conflict detection. The future work recommended for this study are (i) for measurement of performance other types of search algorithms may also be applied, (ii) other database methodologies may also be explored for determining their possible impacts on proposed aircraft conflict prediction model.
The research in [18] introduces a method for detection of various attacks in ADS-B in perspective of ATC. The data used in this study is ADS-B data which are obtained from real world aircraft flights. In methodology the flight plan is integrated with ADS-B information in order to construct image stream of flight in airspace and then generative adversarial network–long short-term memory (GAN-LSTM) model is applied to predict future images. Furthermore, the techniques of normalized cross correlation and mark anomalous targets are used to detect abnormal images. The experimental results describes that the developed approach shows better detection rate in prediction of various attacks. The limitation of this study is that the attacks are detected and anomalous targets are located only in controlled airspace. The future work is to give attack mitigation.
The study in [19] presented framework for prediction of separation error which include long leading time and a multi-facto approach characterizing the inter-relationships between task complexity, behavioral activity, cognitive load, and operational performance. The authors applied synchronization on raw data collected from multiple sources at different sampling rates depending on up-date period of the Metacraft simulation system which extracts information about air traffic. The methodology proposed in this research uses an encoder-decoder LSTM network to make predictions about long-time-ahead separation errors through combining multimodal features which causes decrease in accumulated errors. The results reveal that as compared to the model exploiting one single feature for conflict prediction the performance of proposed multi-feature model improves significantly.
The relation between incident causal factor event and resultant event for commercial air transportation system is evaluated in [20]. The data used in this study are incident cases which are acquired from Aviation Safety Reporting System (ASRS). In methodology the Bayesian network which is based in a hybrid approach of max–min hill-climbing is constructed for prediction of risk in commercial air flights. A resource investment combination is used to obtain results, which shows the usefulness of proposed approach for minimizing safety risk in commercial air transportation system also occurrence of high level of risk is reduced. The limitations are (i) ASRS is a database specific to a nation which does not cover incidents from other nations and (ii) the aviation incident reports lack root causes and event outcomes information about an incident. The future work is suggested that (i) data can be collected from other sources focusing commercial aviation incidents from other regions, classification schemes with specific strategies and (ii) to combine manual approach with ML algorithm for further research in risk mitigation.
In [21] the various types of attacks are studied to which ADS-B system is exposed and the corresponding states about abnormal data are simulated. The historical data of aircraft flights is used in this study. A methodology is developed for detection of ADS-B data attacks which is based on techniques of Long Short-Term Memory Encoder–Decoder (LSTM-ED) and hypersphere classifier is proposed in methodology. Experimental results reveal that proposed approach shows effectiveness in attack detection with increased accuracy.
The objective of work in [22] is to detect if an aircraft crash occurred because of a bird strike or not by making use of data mining techniques. Data is gathered about all aircraft accidents which is obtained from National Transportation Safety Board (NTSB). The proposed methodology introduces a ML-based model which comprises of decision tree, K-Nearest Neighbors (KNN) and Gaussian Naive Bayes which are effective in safety of aviation system and useful in early finding aircrafts mishaps. The results are obtained through model prediction which demonstrates high accuracy percentage.
The authors of [23] study the temporal effects on air traffic densities and number of aircrafts taking turns in given section of airspace in order to detect SMI. The data used in this study is extracted from simulator experiment. In methodology logistic regression models are applied for prediction of loss of separation between aircrafts as an early warning to maintain safety. The results obtained in this research reveal that regression model for the temporal effects on air traffic densities demonstrated greater accuracy as compare the number of aircrafts taking turns and integrating time series sections can make predictions about loss of separation with higher accuracy level. Future work left for this research is to (i) investigate the proposed algorithm under different dynamic conditions, such as high off nominate scenarios, (ii) enhance model’s performance by adjusting learning algorithms and (iii) focus on more factors of dynamic density, such as the mix of aircraft types etc., and to determine feature selection criteria.
In [24], the application of a neural network is demonstrated in order to detect the loss of separation between aircrafts within a given configuration during approach phase of an aircraft. The airspace simulation tool is used to obtain training database which is constructed in Matlab/Simulink. In methodology a neural network is constructed which is trained by using the Matlab Deep Learning Toolbox. Results show that by using neural network predictions are made with high accuracy and it may serve as a foundation towards an effective decision support tool for air traffic controllers and automatic airborne navigation systems. The future work for this research is to investigate the application of proposed approach on other phases of aircraft flight.
The results of detailed literature review are as shown in Table 8 in which following abbreviations are used; ANN: Artificial Neural Network, RNN: Recurrent Neural Network, CNN: Convolutional Neural Network, LSTM: long short term memory, QRF: Quantile Random Forest, RF: Random Forest, BI: Bayesian Inference, DT: Decision Tree, GB: Gradient Boosting, C: Classification, R: regression, MC: Monte Carlo, BM: Brownian Motion, LR: Logistic Regression, LS; Least Square, GP: Gaussian Process, P: Pruning KB: Knaive Bayes and KNN: k-Nearest Neighbors. In our systematic literature review on machine learning-based aircraft conflict prediction, our research integrates foundational insights from [36,37,38,39,40,41,42,43,44,45,46,47,48,49].
2.10. Critical Review
This activity is applied for critical review of all the articles selected for detailed literature review. The methodology used in each article is analyzed rigorously in order to find strengths and weakness as shown in Table 9.
3. Challenges
The challenges identified from above analysis are categorized into following subsections. In this sense, using data from different sources and configurations represents another open challenge as shown in Figure 9(a).
3.1. Dataset
Following are main challenges regarding dataset used in conflict prediction.
- The dataset used in all is imbalance because the conflicting scenarios occur very rare.
- The dataset is real time but restricted to specific location and time frame which are from developed and high income countries.
- There are less features in available dataset.
- In case of aircraft accident mostly all features are not available in dataset.
- Large amount of data is available in dataset.
- There are datasets of diverse nature such as images, safety reports, past accidents etc.
- Some dataset are structure while others are unstructured and hard to process directly.
- Some dataset like ADS-B are not secure and data gets tempered easily by hackers.
- Biaseness involved when missing values are data is filled by humans.
3.2. Model Used
- 1.
- Only short-term and medium-term trajectory prediction
- 2.
- Mostly Binary classes are used, little work on multiclass predictions
- 3.
- Some work focused factors like wind, weather, human factor during prediction
- 4.
- Few number of parameters are used
- 5.
- Dependencies/correlation between parameters are less focused
- 6.
- most conflict between two aircraft, one study deals four aircraft
- 7.
- uncertainties and risk factor involved in prediction is discussed in few studies
- 8.
- mostly studies performed time dependant analysis
- 9.
- reduction of cost and less computational needs is still a challenge
- 10.
- supervised learning is widely used while unsupervised learning least used
- 11.
- classification techniques are mostly applied while Regression is less applied as shown in Figure 9(b)
3.3. Evaluation Technique
- confusion matrix and is mostly used as shown in Figure 10.
4. Optimal Solution
The solutions proposed for above mentioned challenges are as follows.
4.1. Dataset
Following are main challenges regarding dataset used in conflict prediction.
- Using global resources and information
- New Software and Hardware Technologies for Data Collection
- Real-time Sharing and Transmission of Data
- Using Data from Different Sources and Configurations
- new data collection strategy
- Building New datasets
- Secure Data Collection
- New sampling methods
4.2. Model Used
Following are optimal solution for each challenge regarding model used in conflict prediction.
- 1.
- More parameters for prediction
- 2.
- Temporal Dependence
- 3.
- Ensemble learning
- 4.
- Robust Prediction
- 5.
- Correlation between Parameters
- 6.
- Deep Learning
- 7.
- Probabilistic vs. Deterministic Prediction
- 8.
- Scalable and Integrated approach
- 9.
- New Prediction Methods
- 10.
- Collaborative decision-making

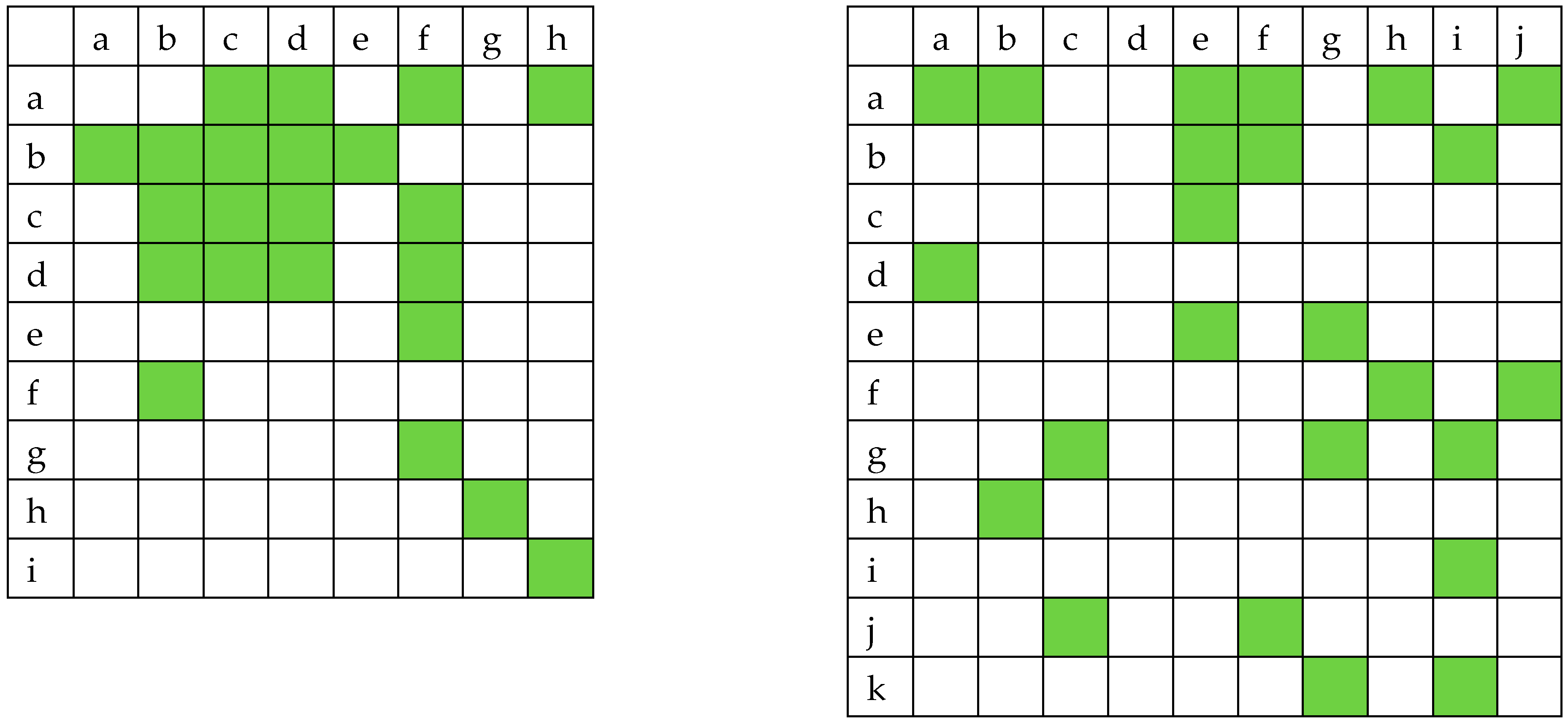
Table 9.
Matrix mapping challenges with suggested solution for Dataset on left and Models on right (Challenges row wise, solution column wise).
Table 9.
Matrix mapping challenges with suggested solution for Dataset on left and Models on right (Challenges row wise, solution column wise).
 |
5. Conclusion
This research serves as a foundation for future research and towards integration of ML based safety prediction techniques into modern ATC system. In this study we present a SLR about the applications of ML techniques in safety prediction of ATC system. Initially, the existing aircraft conflict prediction models are classified into three broad categories; logical, geometric and probabilistic. A formal process of SLR is then conducted which is initiated with preprocessing and effective searching. A series of filtering called title, abstract and objective-based are then applied to extract the most relevant articles. Detailed and critical reviews of selected articles are performed to identify challenges which are segregated into dataset, model and evaluation techniques, furthermore, the optimal solutions for each are proposed. Finally the matrices to map the identified challenged with their proposed solutions are constructed.
The aviation industry has been significantly reluctant in practicing new technologies, as there have been many researches demonstrating outstanding results around for at least a decade. Although the basic objective of an ATC system is to provide maximum level of safety but there are few factors such as making changes to existing equipment and procedures, higher costs and staff training also makes the advent of new technologies and research in this domain questionable. However the integration on ML in ATC system has a greater potential to improve overall safety in terms predicting aircraft incidents, conflicts and accidents before they actually happen and turn into a disaster. Currently, the Federal Aviation Administration (FAA) in the United States of America is investigating the implementation of AI based next-generation (NextGen) technologies to enhance the efficiency of ATC system while increasing the level of safety. However, safer ATC system more intelligent systems that allows lower separation distances between aircraft in controlled airspace are yet to be realized.
References
- Chen, Y., Sun, J., Lin, Y., Gui, G., & Sari, H. (2022). Hybrid N-Inception-LSTM-Based Aircraft Coordinate Prediction Method for Secure Air Traffic. IEEE Transactions on Intelligent Transportation Systems, 23(3), 2773–2783. [CrossRef]
- Cheng, C., Guo, L., Wu, T., Sun, J., Gui, G., Adebisi, B., Gacanin, H., & Sari, H. (2022). Machine-Learning-Aided Trajectory Prediction and Conflict Detection for Internet of Aerial Vehicles. IEEE Internet of Things Journal, 9(8), 5882–5894. [CrossRef]
- Förster, S., Schultz, M., & Fricke, H. (2021). Probabilistic Prediction of Separation Buffer to Compensate for the Closing Effect on Final Approach. Aerospace, 8(2), 29. [CrossRef]
- Valdés, R. M. A., & Comendador, V. F. G. (2021). Hierarchical Bayesian Models to Estimate the Number of Losses of Separation between Aircraft in Flight. Applied Sciences, 11(4), 1600. [CrossRef]
- Guo, Y., Sun, Y., He, Y., Du, F., Su, S., & Peng, C. (2022). A Data-driven Integrated Safety Risk Warning Model based on Deep Learning for Civil Aircraft. IEEE Transactions on Aerospace and Electronic Systems, 1–14. [CrossRef]
- Hu, Z., Gan, X., Wu, Y., & Liu, F. (2022). Research on Conflict Detection in Terminal Area based on Monte Carlo Method. 2022 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), 455–459. [CrossRef]
- Jurado, R. D.-A., Comendador, V. F. G., Suarez, M. Z., Moreno, F. P., Gallego, C. E. V., & Valdes, R. M. A. (2022). Predictive safety models for more autonomous systems in Air Traffic Management (ATM). 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), 1–6. [CrossRef]
- Kong, Y., Zhang, X., & Mahadevan, S. (2022). Bayesian Deep Learning for Aircraft Hard Landing Safety Assessment. IEEE Transactions on Intelligent Transportation Systems, 23(10), 17062–17076. [CrossRef]
- Zhou, S., Hu, Y., Guo, D., Lin, Y., & Yang, B. (2022). Data-driven traffic dynamic understanding and safety monitoring applications. 2022 IEEE 4th International Conference on Civil Aviation Safety and Information Technology (ICCASIT), 496–500. [CrossRef]
- Seyedipour, S., Nobahari, H., & Prandini, M. (2022). A probabilistic approach to mid-term conflict detection with accuracy estimate. Journal of the Franklin Institute, 359(16), 9193–9219. [CrossRef]
- Subramanian, A., & Mahadevan, S. (2022b). Importance sampling for probabilistic prognosis of sector-wide flight separation safety. Reliability Engineering & System Safety, 222, 108410. [CrossRef]
- Delgado-Aguilera Jurado, R., Gómez Comendador, V. F., Zamarreño Suárez, M., Pérez Moreno, F., Verdonk Gallego, C. E., & Arnaldo Valdés, R. M. (2022). Assessment of Potential Conflict Detection by the ATCo. Aerospace, 9(9), 522. [CrossRef]
- Ortner, P., Steinhöfler, R., Leitgeb, E., & Flühr, H. (2022). Augmented Air Traffic Control System—Artificial Intelligence as Digital Assistance System to Predict Air Traffic Conflicts. AI, 3(3), 623–644. [CrossRef]
- Pérez-Castán, J. A., Pérez Sanz, L., Fernández-Castellano, M., Radišić, T., Samardžić, K., & Tukarić, I. (2022). Learning Assurance Analysis for Further Certification Process of Machine Learning Techniques: Case-Study Air Traffic Conflict Detection Predictor. Sensors, 22(19), 7680. [CrossRef]
- Pérez-Castán, J. A., Pérez-Sanz, L., Serrano-Mira, L., Saéz-Hernando, F. J., Rodríguez Gauxachs, I., & Gómez-Comendador, V. F. (2022). Design of an ATC Tool for Conflict Detection Based on Machine Learning Techniques. Aerospace, 9(2), 67. [CrossRef]
- Buselli, I., Oneto, L., Dambra, C., Gallego, C. V., & Martinez, M. G. (2023). Data-Driven Methods for Aviation Safety: From Data to Knowledge. In M. Valle, D. Lehmhus, C. Gianoglio, E. Ragusa, L. Seminara, S. Bosse, A. Ibrahim, & K.-D. Thoben (Eds.), Advances in System-Integrated Intelligence (Vol. 546, pp. 126–136). Springer International Publishing. [CrossRef]
- Monteiro, L. B., Ribeiro, V. F., Garcia, C. P., Rocha Filho, G. P., & Weigang, L. (2023). 4D Trajectory Conflict Detection and Resolution Using Decision Tree Pruning Method. IEEE Latin America Transactions, 21(2), 277-287. [CrossRef]
- Yue, M., Zheng, H., Cui, H., & Wu, Z. (2023). GAN-LSTM-Based ADS-B Attack Detection in the Context of Air Traffic Control. IEEE Internet of Things Journal. [CrossRef]
- Xiong, R., Wang, Y., Tang, P., Cooke, N. J., Ligda, S. V., Lieber, C. S., & Liu, Y. (2023). Predicting separation errors of air traffic controllers through integrated sequence analysis of multimodal behaviour indicators. Advanced Engineering Informatics, 55, 101894. [CrossRef]
- Zhou, Z., Yu, X., Zhu, Z., Zhou, D., & Qi, H. (2023). Development and application of a Bayesian network-based model for systematically reducing safety risks in the commercial air transportation system. Safety science, 157, 105942. [CrossRef]
- Yi, J., Lin, L., Nisi, L., & Jintao, W. (2023, January). ADS-B Anomaly Detection Algorithm Based on LSTM-ED and SVDD. In Proceedings of the 10th Chinese Society of Aeronautics and Astronautics Youth Forum (pp. 245-257). Singapore: Springer Nature Singapore.
- Nimmagadda, S., Sivakumar, S., Kumar, N., & Haritha, D. (2020, July). Predicting airline crash due to birds strike using machine learning. In 2020 7th international conference on smart structures and systems (ICSSS) (pp. 1-4). IEEE.
- Wang, Y., Tang, P., Shi, Y., Liu, Y., & Cooke, N. J. (2020, December). Predicting terminal mid-air collisions through simulator experiments of air traffic control. In 2020 Winter Simulation Conference (WSC) (pp. 2536-2548). IEEE.
- Casado, R., & Bermúdez, A. (2020). Neural network-based aircraft conflict prediction in final approach maneuvers. Electronics, 9(10), 1708. [CrossRef]
- Shone, R., Glazebrook, K., & Zografos, K. G. (2021). Applications of stochastic modeling in air traffic management: Methods, challenges and opportunities for solving air traffic problems under uncertainty. European Journal of Operational Research, 292(1), 1-26. [CrossRef]
- Tang, J., Liu, G., & Pan, Q. (2022). Review on artificial intelligence techniques for improving representative air traffic management capability. Journal of Systems Engineering and Electronics, 33(5), 1123-1134. [CrossRef]
- Wang, Z., Pan, W., Li, H., Wang, X., & Zuo, Q. (2022). Review of deep reinforcement learning approaches for conflict resolution in air traffic control. Aerospace, 9(6), 294. [CrossRef]
- Pinto Neto, E. C., Baum, D. M., Almeida Jr, J. R. D., Camargo Jr, J. B., & Cugnasca, P. S. (2023). Deep Learning in Air Traffic Management (ATM): A Survey on Applications, Opportunities, and Open Challenges. Aerospace, 10(4), 358. [CrossRef]
- Degas, A., Islam, M. R., Hurter, C., Barua, S., Rahman, H., Poudel, M., ... & Arico, P. (2022). A survey on artificial intelligence (ai) and explainable ai in air traffic management: Current trends and development with future research trajectory. Applied Sciences, 12(3), 1295. [CrossRef]
- Liu, C., Zheng, Q., Chang, J., & Li, Y. (2020). Summary and outlook of 4D track prediction methods. Journal of Mechanical Engineering, Automation and Control Systems, 1(1), 46-55. [CrossRef]
- Okay, F. Y., & Özdemir, S. (2021, October). Real-time Aircraft Tracking System: A Survey and A Deep Learning Based Model. In 2021 International Symposium on Networks, Computers and Communications (ISNCC) (pp. 1-6). IEEE.
- Ribeiro, M., Ellerbroek, J., & Hoekstra, J. (2020). Review of conflict resolution methods for manned and unmanned aviation. Aerospace, 7(6), 79. [CrossRef]
- Wang, Y., & Chung, S. H. (2022). Artificial intelligence in safety-critical systems: a systematic review. Industrial Management & Data Systems, 122(2), 442-470. [CrossRef]
- https://www.icao.int › safety › pages › safety-report (last visited: 31st May 2023).
- Williamson, T., & Spencer, N. A. (1989). Development and operation of the traffic alert and collision avoidance system (TCAS). Proceedings of the IEEE, 77(11), 1735-1744. [CrossRef]
- Hussain, K., Hussain, S. J., Jhanjhi, N. Z., & Humayun, M. (2019, April). SYN flood attack detection based on bayes estimator (SFADBE) for MANET. In 2019 International Conference on Computer and Information Sciences (ICCIS) (pp. 1-4). IEEE.
- Adeyemo Victor Elijah, Azween Abdullah, NZ JhanJhi, Mahadevan Supramaniam and Balogun Abdullateef O, “Ensemble and Deep-Learning Methods for Two-Class and Multi-Attack Anomaly Intrusion Detection: An Empirical Study” International Journal of Advanced Computer Science and Applications(IJACSA), 10(9), 2019. [CrossRef]
- Lim, M., Abdullah, A., & Jhanjhi, N. Z. (2021). Performance optimization of criminal network hidden link prediction model with deep reinforcement learning. Journal of King Saud University-Computer and Information Sciences, 33(10), 1202-1210. [CrossRef]
- Gaur, L., Singh, G., Solanki, A., Jhanjhi, N. Z., Bhatia, U., Sharma, S., ... & Kim, W. (2021). Disposition of youth in predicting sustainable development goals using the neuro-fuzzy and random forest algorithms. Human-Centric Computing and Information Sciences, 11, NA.
- Kumar, T., Pandey, B., Mussavi, S. H. A., & Zaman, N. (2015). CTHS based energy efficient thermal aware image ALU design on FPGA. Wireless Personal Communications, 85, 671-696. [CrossRef]
- Nanglia, S., Ahmad, M., Khan, F. A., & Jhanjhi, N. Z. (2022). An enhanced Predictive heterogeneous ensemble model for breast cancer prediction. Biomedical Signal Processing and Control, 72, 103279. [CrossRef]
- Gaur, L., Afaq, A., Solanki, A., Singh, G., Sharma, S., Jhanjhi, N. Z., ... & Le, D. N. (2021). Capitalizing on big data and revolutionary 5G technology: Extracting and visualizing ratings and reviews of global chain hotels. Computers and Electrical Engineering, 95, 107374. [CrossRef]
- Diwaker, C., Tomar, P., Solanki, A., Nayyar, A., Jhanjhi, N. Z., Abdullah, A., & Supramaniam, M. (2019). A new model for predicting component-based software reliability using soft computing. IEEE Access, 7, 147191-147203. [CrossRef]
- Hussain, S. J., Ahmed, U., Liaquat, H., Mir, S., Jhanjhi, N. Z., & Humayun, M. (2019, April). IMIAD: intelligent malware identification for android platform. In 2019 International Conference on Computer and Information Sciences (ICCIS) (pp. 1-6). IEEE.
- Humayun, M., Alsaqer, M. S., & Jhanjhi, N. (2022). Energy optimization for smart cities using iot. Applied Artificial Intelligence, 36(1), 2037255. [CrossRef]
- Ghosh, G., Verma, S., Jhanjhi, N. Z., & Talib, M. N. (2020, December). Secure surveillance system using chaotic image encryption technique. In IOP conference series: materials science and engineering (Vol. 993, No. 1, p. 012062). IOP Publishing.
- Almusaylim, Z. A., Zaman, N., & Jung, L. T. (2018, August). Proposing a data privacy aware protocol for roadside accident video reporting service using 5G in Vehicular Cloud Networks Environment. In 2018 4th International conference on computer and information sciences (ICCOINS) (pp. 1-5). IEEE.
- Wassan, S., Chen, X., Shen, T., Waqar, M., & Jhanjhi, N. Z. (2021). Amazon product sentiment analysis using machine learning techniques. Revista Argentina de Clínica Psicológica, 30(1), 695. [CrossRef]
- Shahid, H., Ashraf, H., Javed, H., Humayun, M., Jhanjhi, N. Z., & AlZain, M. A. (2021). Energy optimised security against wormhole attack in iot-based wireless sensor networks. Comput. Mater. Contin, 68(2), 1967-81. [CrossRef]
Figure 1.
(a) Description of ATC Working; (b) Global Accident Rate Trend.
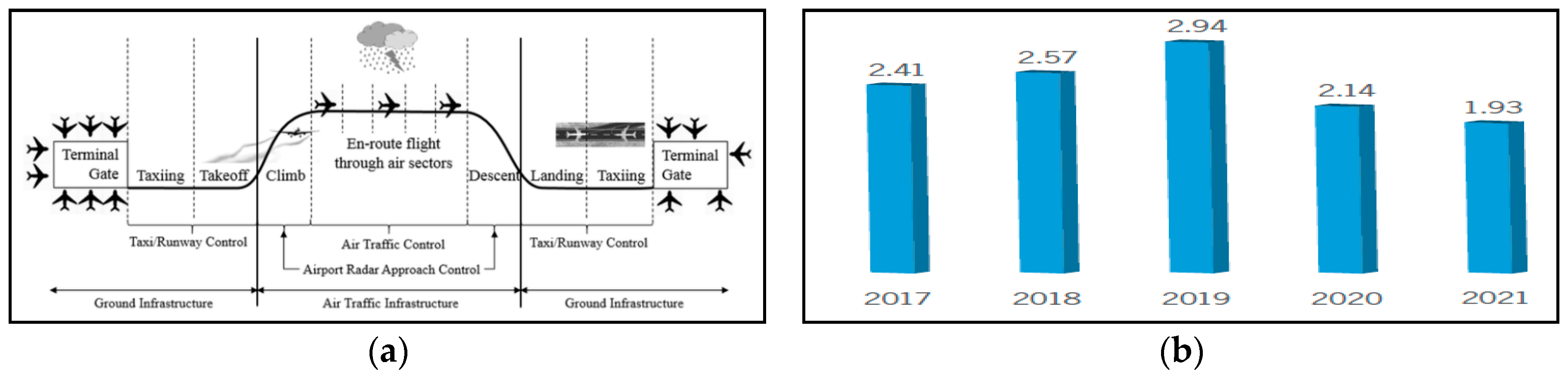
Figure 2.
Classification of Aircraft Conflict Prediction Models.
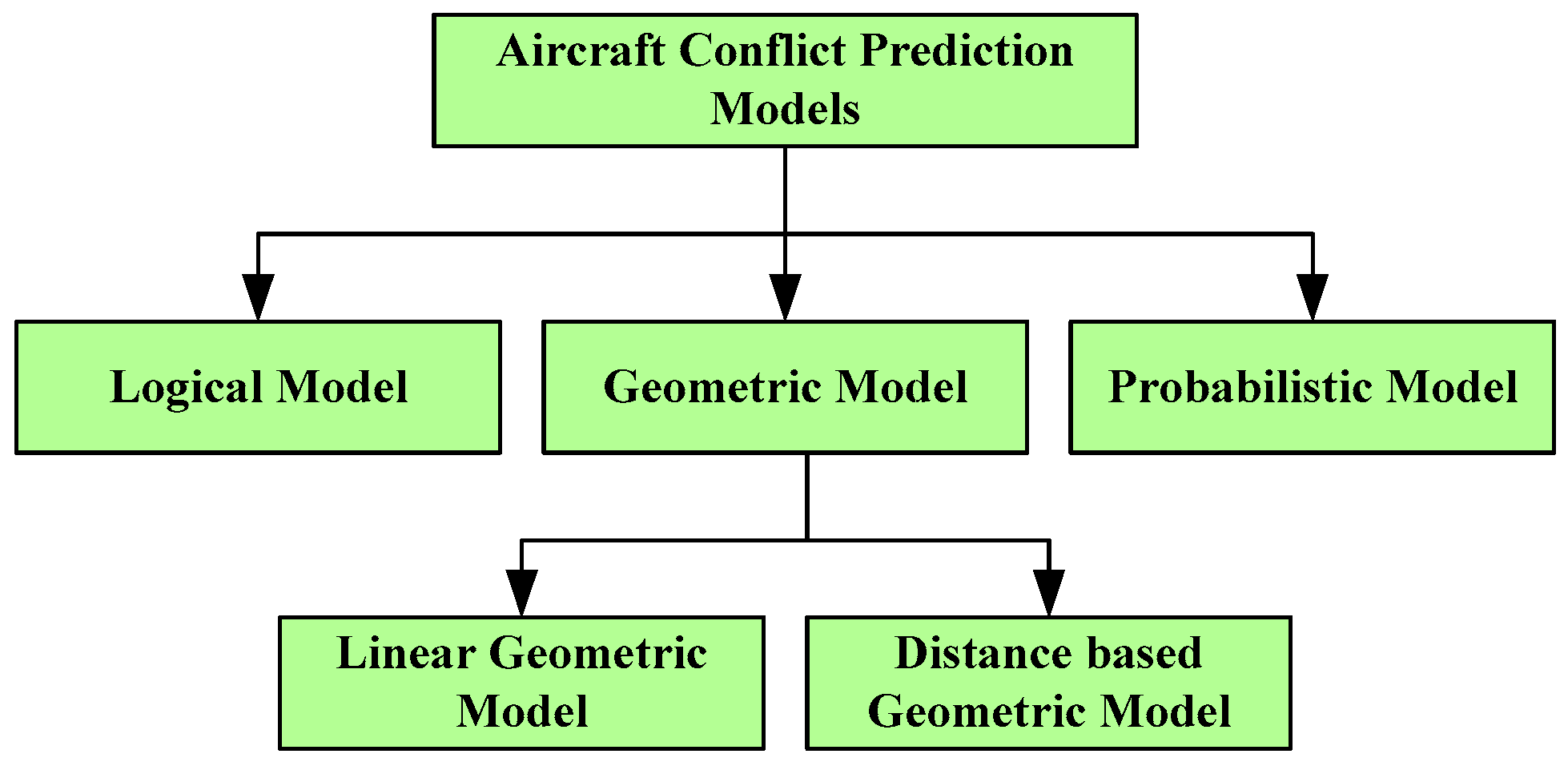
Figure 3.
The Overview of SLR in this Research.
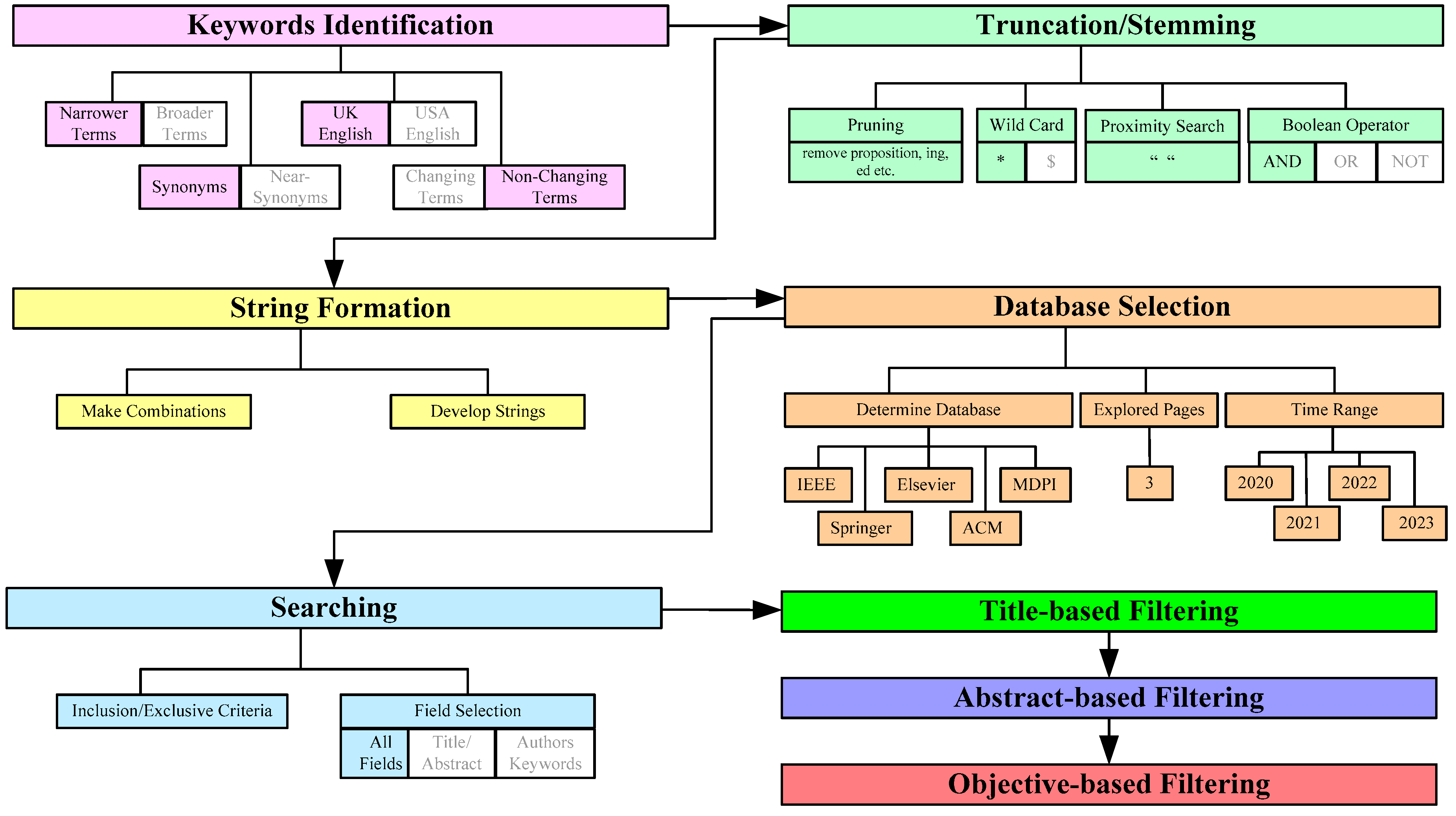
Figure 4.
Application of Boolean Operator in Search Clause.
Figure 5.
Zotero Folder View.
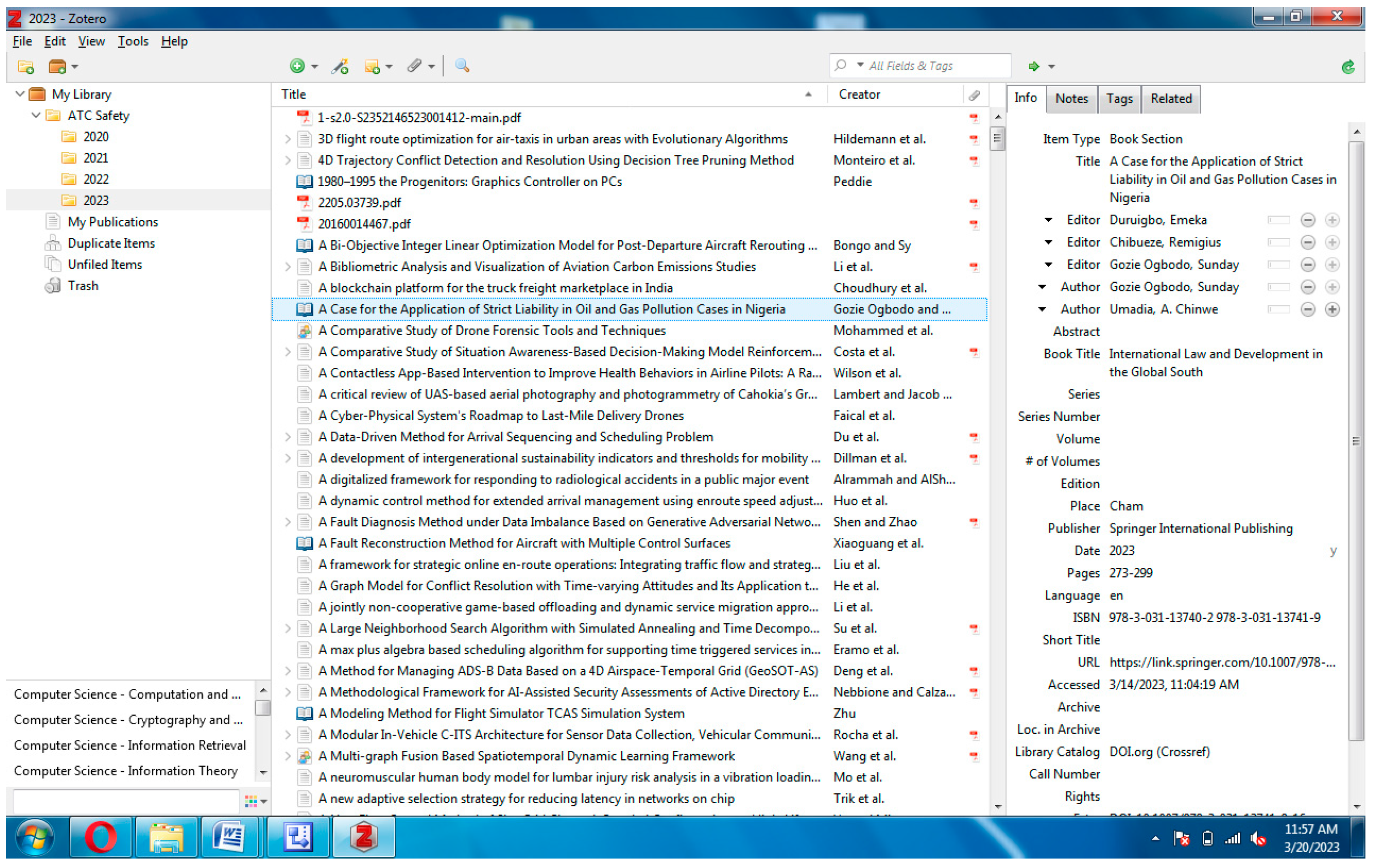
Figure 6.
A spreadsheet Prepared for Title-based Filtering.
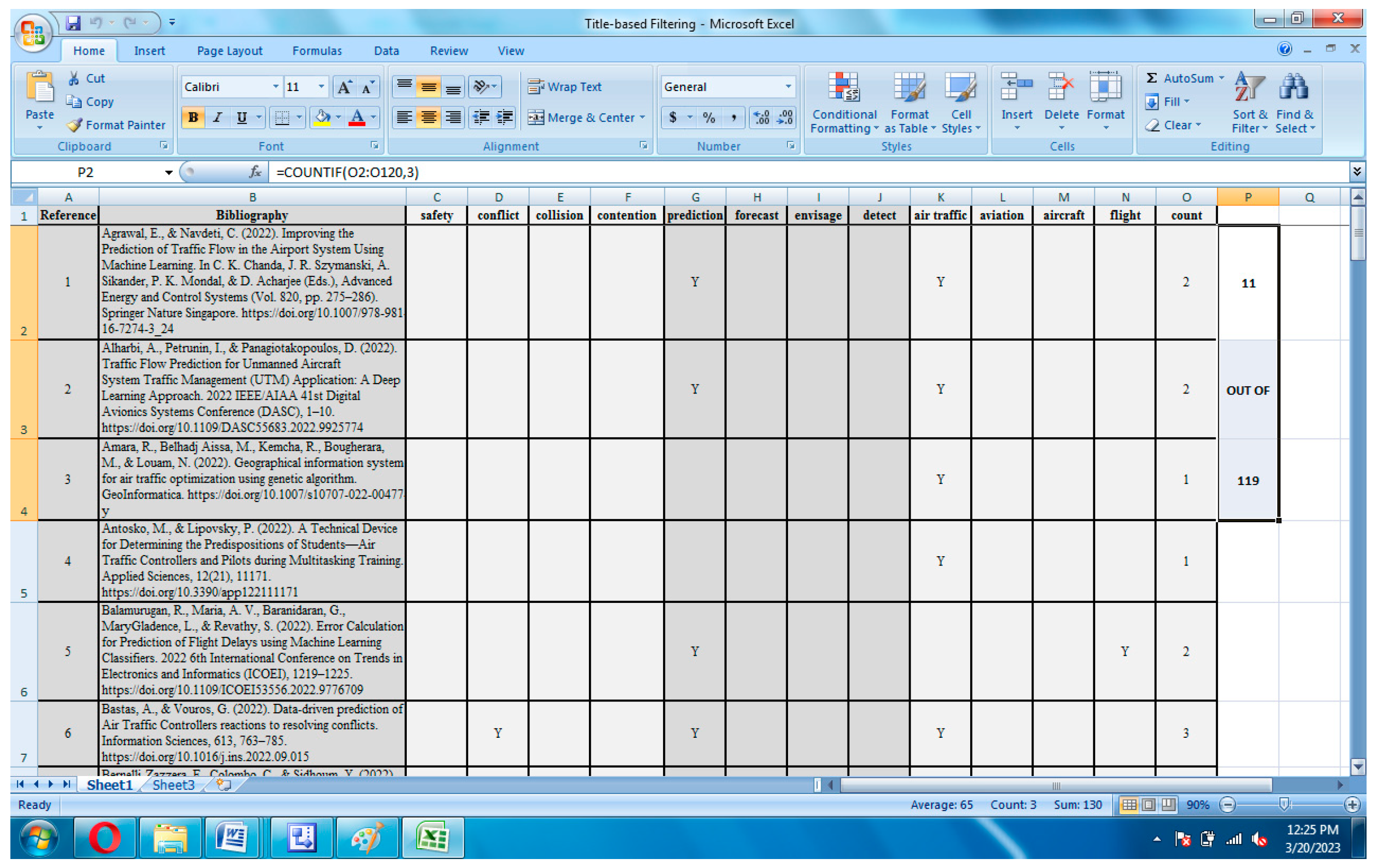
Figure 7.
Graph showing Results of Filtering.
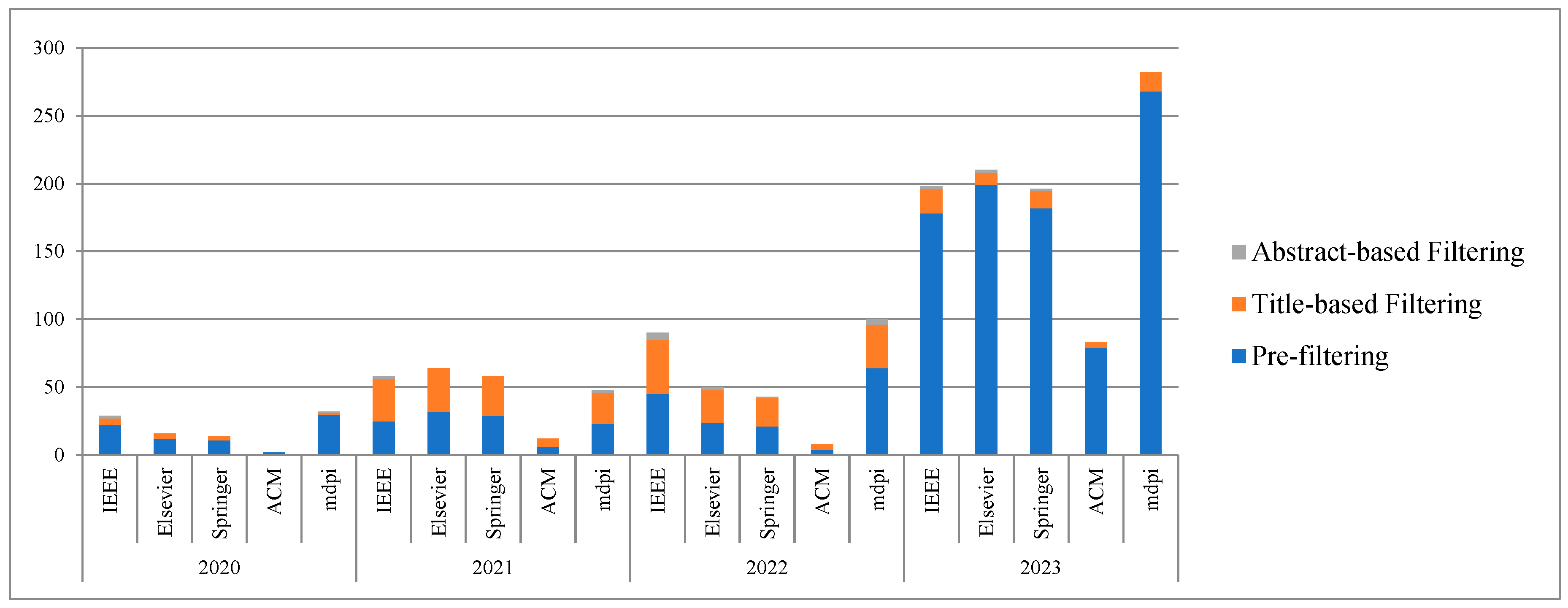
Figure 8.
Results of Filtering on Selected Databases.
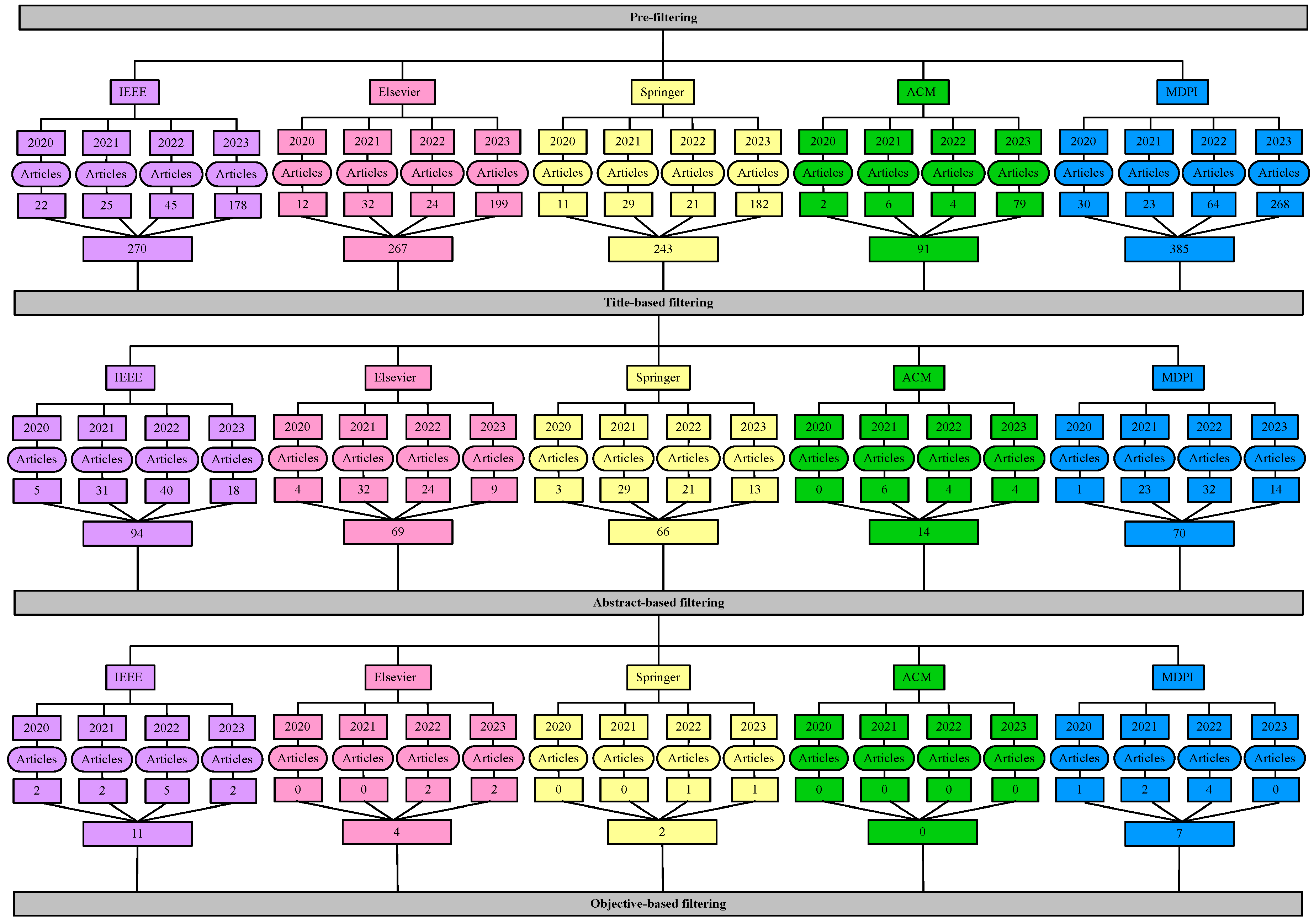
Figure 9.
(a) A Pie Chart showing distribution of Dataset Usage; (b) Pie Chart showing distribution of Models Usage.
Figure 9.
(a) A Pie Chart showing distribution of Dataset Usage; (b) Pie Chart showing distribution of Models Usage.
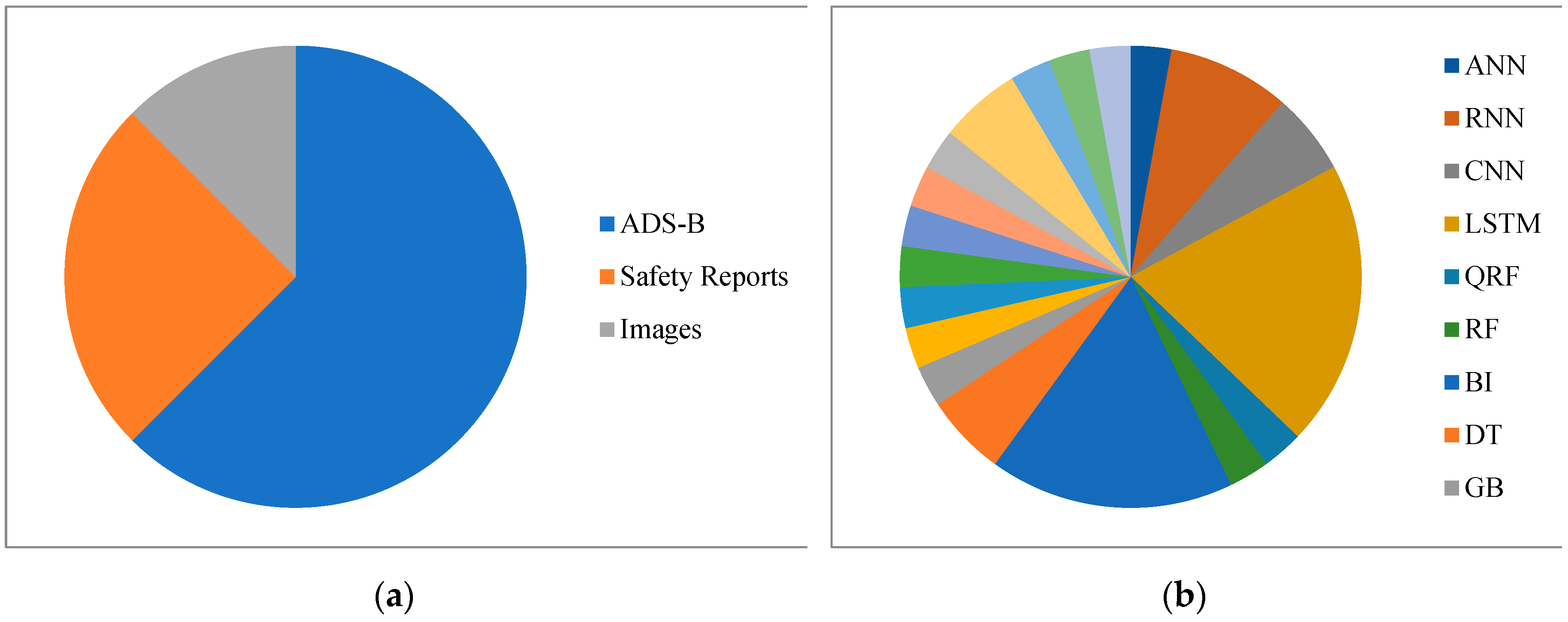
Figure 10.
A Pie Chart showing distribution of Evaluation Techniques Usage.
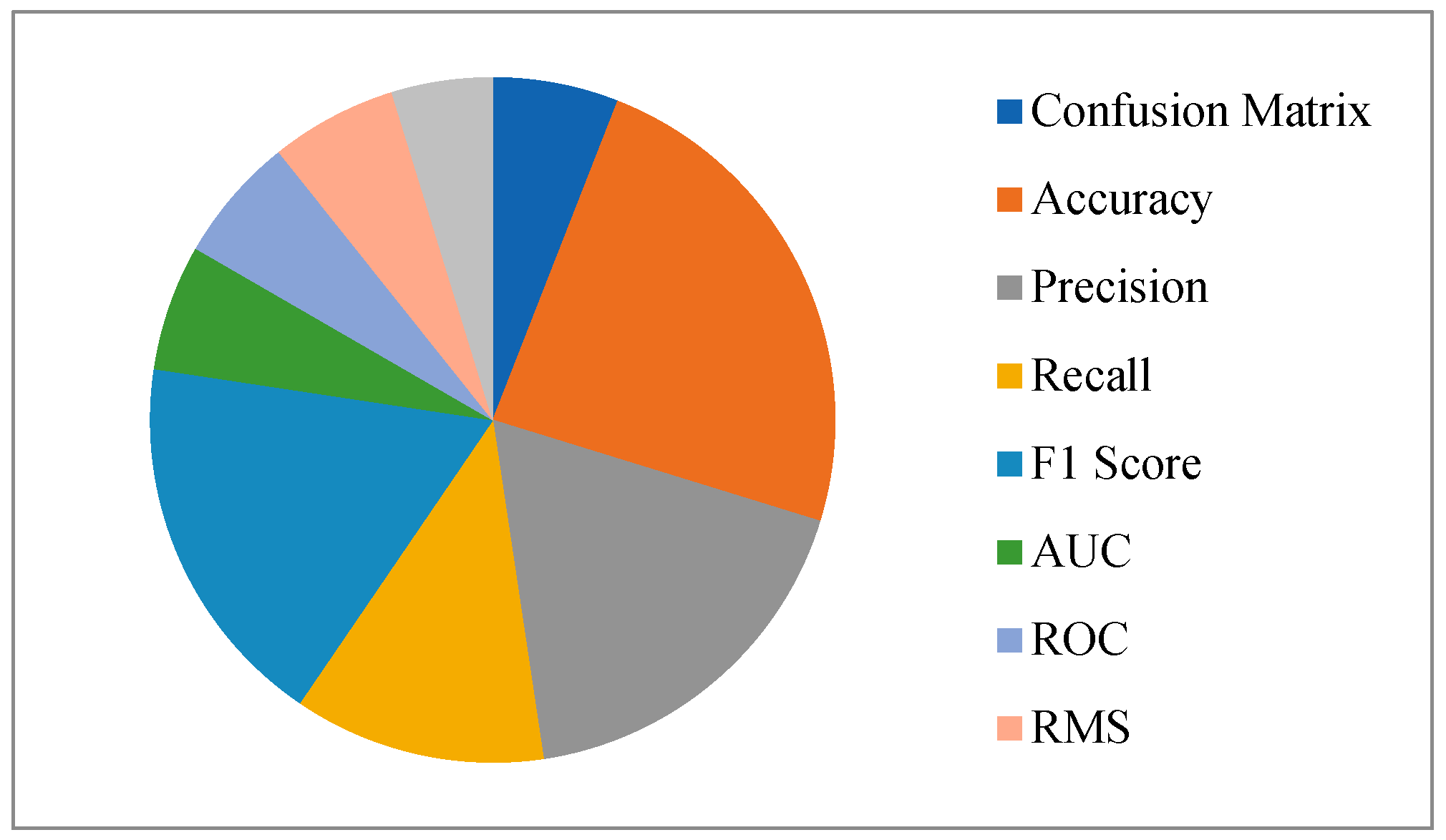
Table 1.
Current ATC surveys.
| Ref | Year | Objective | Problems Addressed |
| [25] | 2020 | stochastic modeling applications in aviation | demand and capacity management |
| management of air traffic congestion | |||
| [26] | 2022 | employment of AI techniques for improvement of ATM capability |
history of AI techniques |
| structure of AI techniques | |||
| advantages of AI methods | |||
| applications to several representative ATM tasks | |||
| [27] | 2022 | applications of Deep Reinforcement Learning (DRL) in conflict resolution | basics of conflict resolution |
| construction of DRL | |||
| practical demonstration of DRL in conflict resolution | |||
| [28] | 2023 | Deep Learning (DL) applications for Air Traffic Management (ATM) | solutions are categorized based on DL techniques |
| future recommendations based on the ATM solutions | |||
| open challenges identified for DL applications and ATM solutions | |||
| [29] | 2022 | benefits of AI within aviation/ATM domain | Working of general and ATM eXplainable Artificial Intelligence (XAI) |
| exploring need of XAI | |||
| existing solutions and their limitations | |||
| formulate the findings into a conceptual framework | |||
| [30] | 2020 | reviews 4D track prediction technology |
classification of existing prediction techniques |
| combination methods with aircraft track data | |||
| techniques of data mining used | |||
| applicable scope of each method | |||
| [31] | 2021 | survey of aircraft tracking systems | categorize existing techniques according to their approaches |
| development of real-time DL-based Aircraft Tracking system | |||
| [32] | 2020 | review of existing Conflict Resolution methods for manned and unmanned aircrafts | taxonomy to categories CR algorithms |
| working of tactical and distributed framework | |||
| overview of four CR algorithms | |||
| testing of manned and unmanned scenarios |
Table 2.
Keywords Identification for the problem.
| Safety | Prediction | of | Air Traffic | Control |
| conflict-free | forecast | aviation | manage | |
| collision less | envisage | aircraft | administer | |
| non-contention | detect | flight | governance |
Table 3.
Steps of Truncation on one of the string.
| Safe |
Predict | of | Air Traffic | Control |
| Safe | Predict | Air Traffic | Control | |
| Safe* | Predict* | Air Traffic | Control |
Table 4.
List of strings developed from selected keywords.
| Safe | Predict | Air Traffic | Control |
| safe | forecast | Air Traffic | control |
| safe | envisage | Air Traffic | control |
| safe | detect | Air Traffic | control |
| conflict | predict | Air Traffic | control |
| conflict | forecast | Air Traffic | control |
| conflict | envisage | Air Traffic | control |
| conflict | detect | Air Traffic | control |
| ….. | ….. | ….. | ….. |
| ….. | ….. | ….. | ….. |
| contention | detect | flight | detection |
Table 5.
Searching Details.
| Year | Strings | Database | Pages Explored | Available Articles | Related Articles | Not Related Articles | Duplicate Articles | Total |
| 2023 | Safety Air Traffic Control | IEEE | 3 | 30 | 30 | 0 | 0 | 149 |
| Elsevier | 3 | 30 | 30 | 0 | 0 | |||
| Springer | 3 | 30 | 291 Book | 0 | 0 | |||
| ACM | 3 | 30 | 30 | 0 | 0 | |||
| mdpi | 3 | 30 | 30 | 0 | 0 | |||
| Conflict Air Traffic Control | IEEE | 3 | 30 | 28 | 0 | 2 | 93 | |
| Elsevier | 3 | 30 | 17 | 0 | 13 | |||
| Springer | 3 | 30 | 13 | 0 | 17 | |||
| ACM | 2 | 16 | 12 | 0 | 4 | |||
| mdpi | 3 | 30 | 23 | 0 | 7 | |||
| RiskAir Traffic Control | IEEE | 3 | 30 | 15 | 0 | 15 | 97 | |
| Elsevier | 3 | 30 | 23 | 0 | 7 | |||
| Springer | 3 | 30 | 19 | 0 | 101 Book | |||
| ACM | 3 | 24 | 12 | 0 | 12 | |||
| mdpi | 3 | 30 | 28 | 0 | 2 | |||
| Contention Air Traffic Control | IEEE | 2 | 15 | 10 | 0 | 5 | 36 | |
| Elsevier | 1 | 10 | 6 | 0 | 4 | |||
| Springer | 1 | 10 | 10 | 0 | 0 | |||
| ACM | 1 | 2 | 2 | 0 | 0 | |||
| mdpi | 1 | 10 | 8 | 0 | 2 | |||
| Safety Aviation Control | IEEE | 3 | 30 | 19 | 0 | 11 | 83 | |
| Elsevier | 3 | 30 | 20 | 0 | 10 | |||
| Springer | 3 | 30 | 15 | 0 | 141 Book | |||
| ACM | 2 | 13 | 7 | 0 | 6 | |||
| mdpi | 3 | 30 | 22 | 0 | 8 | |||
| Conflict Aviation Control | IEEE | 3 | 30 | 14 | 0 | 16 | 49 | |
| Elsevier | 3 | 30 | 11 | 0 | 19 | |||
| Springer | 3 | 30 | 8 | 0 | 22 | |||
| ACM | 1 | 2 | 0 | 0 | 2 | |||
| mdpi | 3 | 30 | 16 | 0 | 14 | |||
| Risk Aviation Control | IEEE | 3 | 30 | 19 | 0 | 11 | 69 | |
| Elsevier | 3 | 30 | 17 | 0 | 13 | |||
| Springer | 3 | 30 | 14 | 0 | 151 Book | |||
| ACM | 2 | 12 | 1 | 0 | 11 | |||
| mdpi | 3 | 30 | 18 | 0 | 12 | |||
| Contention Aviation Control | IEEE | 1 | 2 | 2 | 0 | 0 | 39 | |
| Elsevier | 2 | 16 | 13 | 0 | 3 | |||
| Springer | 3 | 25 | 20 | 0 | 5 | |||
| ACM | 1 | 1 | 1 | 0 | 0 | |||
| mdpi | 1 | 3 | 3 | 0 | 0 | |||
| Safety Aircraft Control | IEEE | 3 | 30 | 12 | 0 | 18 | 62 | |
| Elsevier | 3 | 30 | 15 | 0 | 15 | |||
| Springer | 3 | 30 | 19 | 0 | 101 Book | |||
| ACM | 2 | 19 | 7 | 0 | 12 | |||
| mdpi | 3 | 30 | 9 | 0 | 21 | |||
| Conflict Aircraft Control | IEEE | 3 | 30 | 12 | 0 | 18 | 44 | |
| Elsevier | 3 | 30 | 5 | 0 | 25 | |||
| Springer | 3 | 30 | 12 | 0 | 18 | |||
| ACM | 1 | 3 | 0 | 0 | 3 | |||
| mdpi | 3 | 30 | 15 | 0 | 15 | |||
| RiskAircraft Control | IEEE | 3 | 30 | 13 | 0 | 17 | 40 | |
| Elsevier | 3 | 30 | 7 | 0 | 23 | |||
| Springer | 3 | 30 | 6 | 0 | 24 | |||
| ACM | 3 | 22 | 6 | 0 | 16 | |||
| mdpi | 3 | 30 | 8 | 0 | 22 | |||
| ContentionAircraft Control | IEEE | 1 | 4 | 1 | 0 | 3 | 21 | |
| Elsevier | 2 | 15 | 9 | 0 | 6 | |||
| Springer | 3 | 30 | 22 | 0 | 71 Book | |||
| ACM | 1 | 2 | 0 | 2 | ||||
| mdpi | 1 | 6 | 3 | 3 | ||||
| 2022 | Safety PredictionAir Traffic Control | IEEE | 3 | 30 | 25 | 5 | 0 | 78 |
| Elsevier | 3 | 30 | 7 | 23 | 0 | |||
| Springer | 3 | 30 | 16 | 14 | 0 | |||
| ACM | 2 | 15 | 4 | 11 | 0 | |||
| mdpi | 3 | 30 | 26 | 4 | 0 | |||
| Conflict predictionAir Traffic Control | IEEE | 3 | 30 | 15 | 5 | 10 | 41 | |
| Elsevier | 3 | 30 | 14 | 12 | 4 | |||
| Springer | 3 | 30 | 6 | 18 | 6 | |||
| ACM | 1 | 3 | 0 | 3 | 0 | |||
| mdpi | 3 | 30 | 6 | 10 | 14 | |||
| 2021 | Safety PredictionAir Traffic Control | IEEE | 3 | 30 | 20 | 10 | 0 | 94 |
| Elsevier | 3 | 30 | 23 | 7 | 0 | |||
| Springer | 3 | 30 | 23 | 7 | 1 | |||
| ACM | 2 | 15 | 7 | 8 | 0 | |||
| mdpi | 3 | 30 | 21 | 9 | 0 | |||
| Conflict predictionAir Traffic Control | IEEE | 3 | 30 | 11 | 9 | 10 | 36 | |
| Elsevier | 3 | 30 | 18 | 4 | 8 | |||
| Springer | 3 | 30 | 5 | 18 | 7 | |||
| ACM | 1 | 8 | 0 | 6 | 2 | |||
| mdpi | 3 | 30 | 2 | 18 | 10 |
Table 6.
Results of Objective-based Filtering.
| Ref | coordinate/ trajectory |
time-to-fly/ touch down |
Separation Minima | safety performance | controller/ pilot role |
data attacks | risk prediction | conflict prediction |
| [1] | Y | |||||||
| [2] | Y | |||||||
| [3] | Y | |||||||
| [4] | Y | |||||||
| [5] | Y | Y | ||||||
| [6] | Y | |||||||
| [7] | Y | |||||||
| [8] | Y | |||||||
| [9] | Y | |||||||
| [10] | Y | |||||||
| [11] | Y | |||||||
| [12] | Y | |||||||
| [13] | Y | |||||||
| [14] | Y | Y | ||||||
| [15] | Y | |||||||
| [16] | Y | Y | ||||||
| [17] | Y | Y | ||||||
| [18] | Y | |||||||
| [19] | Y | |||||||
| [20] | Y | |||||||
| [21] | Y | |||||||
| [22] | Y | Y | ||||||
| [23] | Y | Y | ||||||
| [24] | Y |
Table 7.
Results of Filtering on Selected Databases.
| Database | Pre-Filtering Count (ZOTERO) | Title-based Filtering Count | Abstract-based Filtering Count | |||||||||
| 2020 | 2021 | 2022 | 2023 | 2020 | 2021 | 2022 | 2023 | 2020 | 2021 | 2022 | 2023 | |
| IEEE | 22 | 25 | 45 | 178 | 5 | 31 | 40 | 18 | 2 | 2 | 5 | 2 |
| Elsevier | 12 | 32 | 24 | 199 | 4 | 32 | 24 | 9 | 0 | 0 | 2 | 2 |
| Springer | 11 | 29 | 21 | 182 | 3 | 29 | 21 | 13 | 0 | 0 | 1 | 1 |
| ACM | 2 | 6 | 4 | 79 | 0 | 6 | 4 | 4 | 0 | 0 | 0 | 0 |
| mdpi | 30 | 23 | 64 | 268 | 1 | 23 | 32 | 14 | 1 | 2 | 4 | 0 |
| Total | 77 | 115 | 158 | 906 | 13 | 121 | 121 | 58 | 3 | 4 | 12 | 5 |
Table 8.
Results of Detailed Literature Review.
| Ref | ANN | RNN | CNN | LSTM | QRF | RF | BI | DT | GB | C | R | MC | BM | LR | LS | GP | P | KB | KNN |
| [1] | Y | Y | |||||||||||||||||
| [2] | Y | Y | Y | ||||||||||||||||
| [3] | Y | ||||||||||||||||||
| [4] | Y | ||||||||||||||||||
| [5] | Y | ||||||||||||||||||
| [6] | Y | Y | Y | ||||||||||||||||
| [7] | Y | ||||||||||||||||||
| [8] | Y | Y | |||||||||||||||||
| [9] | Y | Y | |||||||||||||||||
| [10] | Y | ||||||||||||||||||
| [11] | Y | ||||||||||||||||||
| [12] | Y | ||||||||||||||||||
| [13] | Y | ||||||||||||||||||
| [14] | Y | ||||||||||||||||||
| [15] | Y | Y | |||||||||||||||||
| [16] | Y | ||||||||||||||||||
| [17] | Y | Y | |||||||||||||||||
| [18] | Y | ||||||||||||||||||
| [19] | Y | ||||||||||||||||||
| [20] | Y | ||||||||||||||||||
| [21] | Y | ||||||||||||||||||
| [22] | Y | Y | Y | ||||||||||||||||
| [23] | Y | ||||||||||||||||||
| [24] | Y |
Table 9.
Results of Critical Review.
| Ref. | Year | Scheme | Strengths | Limitations |
| [1] | 2022 | Inception | safe aircraft coordinate prediction scheme | ADS-B signal carries limited information |
| LSTM | widens the perception field | CNN do not encode position and orientation | ||
| CNN | time window based continuous time points | CNN needs a lot of training data to be effective | ||
| CNN is accurate at image recognition and classification | CNNs tend to be much slower | |||
| CNN offers Weight sharing | long training time for multi layer CNN | |||
| CNN minimize computation via regular neural network | CNN recognize image as clusters of pixels | |||
| CNNs uses same knowledge across all image locations | LSTM small context window size(input’s set) | |||
| LSTM handles long-term dependencies effectively | LSTM do not deal big temporal dependencies | |||
| LSTM is less susceptible to vanishing gradient problem | ||||
| LSTM handles complex sequential data efficiently | ||||
| LSTM NN make prediction more accurate | ||||
| [2] | 2022 | LSTM | geometric and grouping-based conflicts detection | slow for mid and long-term trajectory prediction |
| CNN | effective short-term trajectory predictions | ADS-B signal carries limited information | ||
| LS | trajectory prediction accuracy’s impacts are discussed | less reliable neural network | ||
| CNN is accurate at image recognition and classification | CNN do not encode position and orientation | |||
| CNN offers Weight sharing | CNN needs a lot of training data to be effective | |||
| CNN minimize computation via regular neural network | CNNs tend to be much slower | |||
| CNNs uses same knowledge across all image locations | long training time for multi layer CNN | |||
| LSTM handles long-term dependencies effectively | CNN recognize image as clusters of pixels | |||
| LSTM is less susceptible to vanishing gradient problem | LSTM small context window size(input’s set) | |||
| LSTM models complex sequential data efficiently | LSTM do not deal big temporal dependencies | |||
| LSTM NN make prediction more accurate | ||||
| [3] | 2021 | QRF | a tool for arrival time-to-fly prediction | slow for trade-off between two scenarios |
| specific needs of the use case based prediction | considers aircraft present state and weather | |||
| QRF gives non-parametric estimates of median and quantile predicted value | QRF not evaluated for variable length of time-series input | |||
| QRF focus model uncertainty | ||||
| [4] | 2021 | BI (R) | safety prediction for European airspace | only for European Airspace |
| compatible with reduced data and expert’s opinions | considers only four parameters | |||
| captures hierarchical dependencies between parameters | BI does not inform about prior selection | |||
| BI has high statistical capacity in low probability events | BI makes posterior distributions largely influenced by priors | |||
| BI combines prior information with data | BI gives high computational cost for models with large number of parameters | |||
| BI convenient for hierarchical models and missing data | ||||
| BI provides exact inferences for conditional on data | ||||
| [5] | 2022 | LSTM | combines fault diagnosis and risk theory | lacks time-constrained dynamic risk analysis |
| integrates real-time data and post-flight failure data | do not address correlation between failures | |||
| verify the accuracy of the prediction | LSTM small context window size(input’s set) | |||
| LSTM handles long-term dependencies effectively | LSTM do not deal big temporal dependencies | |||
| LSTM is less susceptible to vanishing gradient problem | ||||
| LSTM models complex sequential data efficiently | ||||
| LSTM NN make prediction more accurate | ||||
| [6] | 2022 | MC | simulation based real cases are considered | only considers influence of wind |
| GP | MC provides multiple probability and outcomes from large pool of random data samples | Considers only two aircraft | ||
| BM | MC offers clearer picture than a deterministic forecast | MC results are highly dependent on the input values and distribution | ||
| SDE detects actual states in a model from data | MC take excessive computational powers | |||
| SDE prediction remains close to data even when model parameters are incorrect | SDE may not have solutions that can be expressed in terms of elementary functions | |||
| SDE requires substantial mathematical machinery to understand at any depth | ||||
| [7] | 2022 | BI | keeps the number of adverse outputs low | only two high relevance variables |
| varying input conditions | aircraft operation variables not considered | |||
| BI’s high statistical capacity in low probability events | BI does not inform about prior selection | |||
| BI combines prior information with data | BI makes posterior distributions largely influenced by priors | |||
| BI convenient for hierarchical models and missing data | BI gives high computational cost for models with large number of parameters | |||
| BI provides exact inferences for conditional on data | ||||
| [8] | 2022 | BI | model dimension is decreased by increasing relevance and reducing redundancy | constructed for a particular airport |
| RNN | a regression model to address class imbalance problem | runway configurations often vary | ||
| gives information about severity of hard landing | data is used from only one aircraft type | |||
| RNN is dynamic and computationally powerful | does not estimate reference speed | |||
| RNN is capable of approximating arbitrary nonlinear dynamic systems with arbitrary precision | poor performance when data is not adequate | |||
| RNN remembers each information through time | RNN has vanishing and exploding gradient | |||
| LSTM NN make prediction more accurate | RNN training is difficult | |||
| probabilistic NN training by Bayesian approach supports risk-informed decision making | RNN can not compute long sequences for tanh and relu activation functions | |||
| BI has high statistical capacity in low probability events | BI does not inform about prior selection | |||
| BI combines prior information with data | BI makes posterior distributions largely influenced by priors | |||
| BI convenient for hierarchical models and missing data | BI gives high computational cost for models with large number of parameters | |||
| BI provides exact inferences for conditional on data | ||||
| [9] | 2022 | RNN | clarify key air traffic operations for safety monitoring | RNN has vanishing and exploding gradient |
| CNN | RNN is dynamic and computationally powerful | RNN training is difficult | ||
| RNN approximates arbitrary nonlinear dynamic systems having arbitrary precision | RNN can not compute long sequences for tanh and relu activation functions | |||
| RNN remembers each information through time | CNN do not encode position and orientation | |||
| CNN is accurate at image recognition and classification | CNN needs a lot of training data to be effective | |||
| CNN offers Weight sharing | CNNs tend to be much slower | |||
| CNN minimize computation via regular neural network | long training time for multi layer CNN | |||
| CNNs uses same knowledge across all image locations | CNN recognize image as clusters of pixels | |||
| [10] | 2022 | GP | less computation time. | estimation error increases during sharp turns |
| accurate conflict probability as numerical approaches | lacks 3D multi-aircraft encounter | |||
| can be easily applied to 3D scenarios | considers wind models | |||
| GP directly captures the model uncertainty | GP are not sparse and uses complete information of features for prediction | |||
| GP prior about model’s shape is provided through selection of different kernel functions | GP efficiency degrades in high dimensional spaces when number of features increases | |||
| [11] | 2022 | BI | handles random variables and process uncertainties | considers only one airspace sector |
| reduced computational efforts | BI does not inform about prior selection | |||
| BI has high statistical capacity in low probability events | BI makes posterior distributions largely influenced by priors | |||
| BI combines prior information with data | BI gives high computational cost for models with large number of parameters | |||
| BI convenient for hierarchical models and missing data | ||||
| BI provides exact inferences for conditional on data | ||||
| [12] | 2022 | BI | identification of variables related to controllers performance | BI does not inform about prior selection |
| BI has high statistical capacity in low probability events | BI makes posterior distributions largely influenced by priors | |||
| BI combines prior information with data | BI gives high computational cost for models with large number of parameters | |||
| BI convenient for hierarchical models and missing data | ||||
| BI provides exact inferences for conditional on data | ||||
| [13] | 2022 | LSTM | a digital conflict detection system is developed | predicts conflicts in sequential flight data |
| large-scale and real time air traffic models are built | LSTM small context window size(input’s set) | |||
| predicts four factors | LSTM do not deal big temporal dependencies | |||
| LSTM handles long-term dependencies effectively | ||||
| LSTM is less susceptible to vanishing gradient problem | ||||
| LSTM models complex sequential data efficiently | ||||
| LSTM NN make prediction more accurate | ||||
| [14] | 2022 | GB | time dependence analysis | GB overemphasize outliers and cause overfitting |
| learning assurance analyses performed | GB is computationally expensive | |||
| GB often provides predictive accuracy | GB is less interpretative in nature | |||
| GB has lots of flexibility | GB influence model behavior as it results in many parameters | |||
| GB has no data preprocessing and handle missing data | ||||
| [15] | 2022 | C | Four-Dimension Trajectory based conflict predictions | operation and environment variables not used |
| R | C is effective in high dimensional spaces | other sources for 4DT predictions as input | ||
| C is memory efficient | C slow real time prediction | |||
| R uses more than two independent variables | C is difficult to implement | |||
| R determines the unbiased relationship between two variables by controlling effects of other variables | C is based on complex algorithm | |||
| R cannot work properly with poor quality data | ||||
| R susceptible to collinear problems | ||||
| [16] | 2023 | RF | RF has easy-to-understand hyperparameters | RF increased accuracy requires more trees |
| RFclassifier doesn't overfit with enough trees | More RF trees slow down model | |||
| RF an’t describe relationships within data | ||||
| [17] | 2023 | DT | a large amount of data is handled efficiently | DT are unstable |
| P | reduce the computational cost economically | DT predictions neither smooth nor continuous | ||
| DT has simple interpretation and visualization | biased DTs are created if some classes dominate | |||
| DT performs better even if its assumptions breach | P sometimes affects the accuracy negatively | |||
| DT works well with numerical and categorical data also multi-output problems | P performance and accuracy depends on data’s nature | |||
| DT is less costly | ||||
| P reduces the size of decision trees | ||||
| P is advantageous in removing the redundant rules | ||||
| [18] | 2023 | LSTM | process airspace flight image frames | can locate anomalous targets |
| integrates flight plan with ADS-B data | LSTM small context window size(input’s set) | |||
| detection of ADS-B anomalous attack in ATC system | LSTM do not deal big temporal dependencies | |||
| LSTM handles long-term dependencies effectively | ||||
| LSTM is less susceptible to vanishing gradient problem | ||||
| LSTM models complex sequential data efficiently | ||||
| LSTM NN make prediction more accurate | ||||
| [19] | 2023 | LSTM | A multi-factorial model and multi-modal system | small sample size |
| An encoder-decoder LSTM network | task complexity design | |||
| LSTM handles long-term dependencies effectively | studies conducted in simulated environment | |||
| LSTM is less susceptible to vanishing gradient problem | LSTM small context window size(input’s set) | |||
| LSTM models complex sequential data efficiently | LSTM do not deal big temporal dependencies | |||
| LSTM NN make prediction more accurate | ||||
| [20] | 2023 | BI | data-driven classification approach is provided with a hierarchical structure | regional incident data is used |
| resource investment optimization with efficiency | BI does not inform about prior selection | |||
| BI has high statistical capacity in low probability events | BI makes posterior distributions largely influenced by priors | |||
| BI combines prior information with data | BI gives high computational cost for models with large number of parameters | |||
| BI convenient for hierarchical models and missing data | ||||
| BI provides exact inferences for conditional on data | ||||
| [21] | 2023 | LSTM | LSTM handles long-term dependencies effectively | LSTM small context window size(input’s set) |
| LSTM is less susceptible to vanishing gradient problem | LSTM do not deal big temporal dependencies | |||
| LSTM is efficient at modeling complex sequential data | ||||
| LSTM NN make prediction more accurate | ||||
| [22] | 2020 | DT | DT has simple interpretation and visualization | over-complex DT do not generalize data well |
| KB | DT performs better even if its assumptions breach | DT are unstable | ||
| KNN | DT works well with numerical and categorical data also multi-output problems | DT predictions neither smooth nor continuous | ||
| DT is less costly | biased DTs are created if some classes dominate | |||
| KB is simple to Implement. | KB Conditional Independence Assumption do not always hold | |||
| KB is very fast | KB has Zero probability problem | |||
| KB gives accurate results if conditional Independence assumption holds | KNN does not perform better on large dataset | |||
| KNN no Training Period and new data adds seamlessly | KNN does not perform better on high dimension space | |||
| KNN is very easy to implement | KNN need feature scaling | |||
| KNN sensitive to noisy, missing data and outlier | ||||
| [23] | 2020 | LR | use historic traffic time series data in different periods | need to consider more factors |
| LR is easier to set up and train | low performance | |||
| LR good differ data outcome are linearly separable | LR fails to predict a continuous outcome | |||
| LR may not be accurate for small sample size | ||||
| LR assumes linearity between predicted and predictor variables | ||||
| [24] | 2020 | ANN | NN is predictive model and automatic learning feature | NN generates a certain output is questionable |
| NN handle large, complex, missing and sequential data | NN is complicated and long development time | |||
| NN exhibits improved performance | NN usually require much more data | |||
| NN handling structured and unstructured data and also non-linear relationships | NN are more computationally expensive | |||
| NN offers scalability and generalization |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



