
Submitted:
21 December 2023
Posted:
04 January 2024
You are already at the latest version
Abstract
This experimental research presents an easier model for fitting experimental results that can be simulate the dynamical behaviour of a single degree freedom system, SDFS, subjected in a forced vibration in a shaking table. The fractional damping using a Kelvin-Voigt fractional derivative rheological model, KVFRdm, to represent a fractional oscillator and compare with the experimental model.
Keywords:
fractional differential equations
; fractional damping
; dynamic behaviour
1. Introduction
Nowdays mechanical engineering application needs to know the fractional calculus show us the paper the experimental and theoretical results of the dynamic analysis of single degree of freedom systems, SDFS, are presented and compared among them. In this particular study the differential equation used to obtain the dynamic response of a simple degree of freedom system was determined from the Kelvin-Voigt fractional derivative rheological models, KVFRdm. Current practice in seismic engineering to analyze viscoelastic problems such as the one mentioned here, resort to ordinary differential equations, ODE. However, in the last decades, it has been found that the use of fractional differential equations, FDE, lead to more comprehensive evaluations of time-dependent problems such as the SDFS. In this paper the values of the mass, the stiffness and damping of the SDFS considered in this study, are deduced from the experimental results obtained from forced vibrations induced by the hydraulic shaking table testing of a single degree, HSTTSDF, developed and certified in the Engineering Institute in Geotechnical Coordination, as well as from their analytic interpretation. After realizing simulations of the SDFS using FDE the results were compared with those obtained from the HSTTSDF. It is worth to stress the fact that in this study only the damped element of the fractional differential equation, KVFRdm, was considered fractional. Accordingly, a coupled behaviour between the stiffness and damping is assumed; in other words, the fractionary KVFRdm has the ability of modeling non structured element such as polymers, soils, and others, with such versatility of varying the proportion stiffness-damping as a function of the fractionary exponent varying within the interval . On the basis of the results included in this paper it can be concluded that using the FDE more trustable results are obtained, which might have a direct influence on the procedures presently carried out in the seismic engineering practice.
Recent research shows results of phenomena using ordinary differential equations and reproduces the phenomenon in a way somewhat far from reality. On the other hand, fractional calculus offers mathematical tools with great potential to simulate these complex phenomena. Readers interested in the theory, modeling, and applications of fractional calculation to various types of problems can consult the following references [1], [2],[9], [11] and others. From the results shown in these references that include a great diversity of topics, we can conclude that fractional differential equations offer the ability to simulate with greater precision and simplicity the phenomena of great complexity, contrary to the situation that occurs when trying to reproduce them using classical differential equations.
Fractional derivative model are widely applied to easier fitting of real process and phenomena studied in physics, engineering, population dynamics and others. The fractional calculus show us an alternative way to find the dynamic behaviour and the importance to create a real model like a SDFS to show the behaviour and compare with fractional solution.
The research tries to represent and model one of the famous S1GL models using materials and geometries in order to show the dynamic behaviour in the system and compare it with the differential equations integer, , or fractional in case the answer differs from the integer. References for this type of experimental research used were not found; however, there are articles related to the fractional analytical damped oscillator [3], [7], among others.
2. Brief summary of fractional calculus
Fractional calculus treats fractional derivatives and integrals of arbitrary order. Ordinary calculation has integer derivatives:, If n is changed for an arbitrary quantity then we have the notation where can be real: positive integer (ordinary calculation), positive fractions, negative integers, negative fractions or even complex numbers. It is important to note that “fractional” does not mean just fractions, but an arbitrary amount including integers, fractions and complex numbers in general. The notation of a fractional integral is denoted . When has an arbitrary value, there is no physical interpretation for or .
The birth of the fractional calculus occurs when in a letter of L’Hôpital, dated September 30, 1695, addressed to Leibniz who was asked of the notation used in his publications for the umpteenth derivative of a function, , then, what will result if . Leibniz replied “an apparent paradox of something that will be extracted and one day will have“useful consequences”. In the case presented in this paper, the fractional exponent allows to reproduce with better approximation the dynamic response of systems of a degree of freedom than the integer solution.
2.1. Gamma function
Euler’s gamma function, , is essentially a generalization of the factorial function , allowing to take fractional values of n and mathematically is defined by the integral given in equation 4, which is represented graphically in Figure 1.
2.2. Caputo fractional derivative
Let be a finite interval on the real line . For the Caputo fractional derivative is defined by
Where
and for , and for .
The main advantage of the Caputo approximation is that the initial conditions are specified in the same way as for differential equations of integer order. In particular, when then
It is important to mention that the derivatives of Caputo and Riemman-Liouville are identical, except for the greater ease with which the initial conditions are defined for the case of the derivative of Caputo, as is apparent from the connection between both derivatives (Caputo and Riemman-Liouville) given by the relationship:
3. The hydraulic shaking table testing of a single degree
The Hydraulic Shaking Table Testing of a Single Degree, HSTTSD, used in this research was developed for this purpose in the Geotechnical Coordination of the Engineering Institute UNAM, II-UNAM. The HSTTSD consists of a mechanical-hydraulic control system and a calibration-data acquisition program.
In general, the operation of the HSTTSD, consists of defining a model with a maximum weight of , then the type of displacement is defined by harmonic (Figure 2) or random (Figure 3) function that is measured with a displacement sensor, LDT, and unidirectional accelerometer. The shaking table has a rectangular geometry longitudinal and transverse directions, respectively. It has a maximum peak-peak displacement of , a frequency range of and has a lightweight platform, with weight of .
3.1. Shaking table motion equation
A large number of engineering problems are related to time-dependent loads caused by vibrations of system supports due to natural or environmental events. One way to evaluate the response of such systems is to submit a model (Figure 4) to a dynamic excitation using a shaking table. Then, the response is developed by using a motion equation for the loads caused; i.e., the case of seismic events, as shown by the system in Figure 5.
When the mass is supported on the bar and dynamic displacements are induced by a shaking table, , it will move in a time, t, specified as indicated schematically in Figure 5.
The total displacement of the mass at time, is composed by the sum of the displacement of the t, and the displacement of the mass relative to the base, . The inertial force depends on the value and the total acceleration of the mass. On the other hand, the viscosity of the damping and the elastic forces of the spring will depend on the relative velocity and displacements, respectively.
Using the notation shown in Figure 5, the equation of motion can be written as:
Where
In other words, the response of the shaking table system is equivalent to the response that the same system could have if its base was fixed and the table was subjected to external loads . Thus, any solution for the response of the SDFS subject to external loads can be used to evaluate the response of the shaking table system.
4. Mathematical Model, SDFS with fractional damping
The fractional differential equation of motion is proposed from the fractional rheological model corresponding to the Kelvin-Voigt fractional derivative rheological models where the common damper is replaced by a fractional damper, triangular element in Figure 6, called “spring-pot or KVFRdm”. This represents a combination of springs and dampers in a ladder-type arrangement as shown in Figure 7.
The fractional differential equation of motion according to the dynamic balance of forces acting in the system: inertial forces, stiffness, damping and dynamic action. Thus, according to the rheological model of Figure 6 we have:
where m, c and k are the body mass, system damping coefficient and system stiffness, respectively, is a dynamic excitation and is the order of fractional derivative, .
The Caputo definition was used in this research. Further note that the initial conditions and the parameters is completely know. To know about the definition or computation of fractional derivatives can be found in a classical text [6] [8] [9] is recommended.
It is important to note that the term represents a combination of velocity and displacement, so its units are a function of the fractional exponent [, s=seconds], which makes the fractional differential equation inhomogeneous from the point of view of its units. However, the parameter is entered in the term of the fractional differential equation. Therefore the units of the parameter are () and its value is equal to one, so it is ensured that the units of the term do not change when the value of the exponent changes; hence, the fractional differential equation remains homogeneous from the point of view of its units.
5. Single degree freedom system model
The SDFS is a mainly two-piece designed model by stainless steel, one is the bar and the other is the weight and both are fixed with a rope, then the bar is built-in into the base of the SDFS. The bar is composed of a bar of circular section, diameter , height and the mass is a prism with a quadrangular section, the dimension by side , height and the weight . The built-in SDFS is observed in Figure 8.
5.1. Instrumentation
The instruments used, in this research, to obtain the monitoring of the dynamic response of the SDFS, were a displacement sensor, LVDT, of the MHR series with an interval of inches, and analog unidirectional accelerometers (Model ADXL103) high-precision, low-power single-axis, with a conditioned voltage signal output that measures acceleration over a full range of g. It is important to mention that the output signals are analog voltages proportional to the acceleration.
5.2. Single degree freedom system parameters
The mass, stiffness and damping were obtained experimentally. Then, the parameters obtained were used to solve the ordinary differential equation of motion, ODEM, and the fractional differential equation of motion, FDEM.
The weight of the studied mass was obtained directly from its weight recorded in an electronic balance as show in Figure 9. It should be noted that the weight value of the mass already takes into account the weight of the bar, the effect of the weight of the instruments and their wiring shown in Figure 9. The difference between the reading shown on the scale screen and the value noted in Table 1 represents the effects just mentioned.
The experimental damping and stiffness of a SDFS were obtained experimentally by conducting free vibration test damped with an initial displacement of , knowing the forces required to induce such initial displacement and the boundary conditions of the system, it was possible to calculate the damping and stiffness of the system. The SDFS was instrumented by a unidirectional accelerometer, then the results obtained were histories of experimental accelerations for which an algorithm was made that solved the Newmark theory, in 1959, where it develops a family of step-by-step methods in time to determine accelerations and then, the theory of free vibration damped emanated from the entire differential equation for SDFS was applied and compared with the experimental results, which are shown in Figure 10 for the height of the bar of of SDFS where the continuous line is observed. The experimental result compared to the dashed line representing the analytical damping and a fairly approximate behaviour is observed. The parameters obtained are shown in Table 1.
From the comparison between the attenuation obtained with the entire theoretical model, with the experimental attenuation shown in Figure 10, it can be stated that the results are very similar, which leads us to argue that the experiments carried out lead to reliable results and therefore the results they give serve as a solid basis to certify the theoretical results derived from the solution of the fractional differential equation.
It should be noted that the small differences between the experimental and theoretical graphs (solution of the entire differential equation) shown in Figure 10 are probably due to the minimal geometric imperfections caused during its construction in the mechanical workshop. Bearing this in mind, from the monitoring of the responses of the SDFS the stiffness and damping were obtained, of this model, which are shown in Table 1.
6. Comparison between experimental and fractional results
The ODEM and FDEM were solved using the procedure of the numerical methods with the platform of the software "Matlab" specifically the evaluation of the derivation was carried out using the application proposed in Simulink-Matlab by Nintiger [5].
The experiment was carried out in the HSTTSD and the experimental response was compared with the experimental solution obtained against the FDEM considering intervals 0.1. This is intended to visualize the approximation when using FDE applied to the solution of a SDFS dynamic response.
The experimental test consisted of using a sinusoidal displacement with frequencies of , amplitude of and duration of . Figure 11 shows the end of the displacement history corresponding to . It should be noted that the HSTTSD displacements was defined as MTS_DISP.
Figure 12 show the acceleration history, it was obtained from the HSTTSD platform and the total acceleration of SDFS; the identification of these responses in the figure is HSTTSD_f3hz where the excitation has a frequency of . Likewise, the mass response was identified as Exp_f3M1H13_TA for the frequencies of .
Figure 13 shows the results of the SDFS response in terms of the history of accelerations for the case of excitation with a frequency of 3 . The graph shows the experimental behaviour, Exp_f3M1H13_TA, of the total accelerations of the mass, the numerical result obtained with the fractional numerical results using the fractional differential equation with fractional exponents in intervals of , At_TF to . It is important to note, the graph included in Figure 13 only present the behaviour corresponding to the second 26 to 27 section of the total responses of , where the experimental values show greater discrepancies between the experimental and analytical values At_TF. The graph in this figure show the concordance between the experimental results and those calculated with the numerical solution of the fractional differential equation compared with the whole differential equation and while the fractional exponent value decreases, the severity of the relative (total) accelerations increases appreciably. Thus, the fractional exponent is directly related to the total damping of the system. The graph show the value of the exponent equal to , A_Tf, reproduces with very good approximation to the experimental amplitudes resulting. Consequently, for this particular case, the fractional differential equation with the value of the exponent allows to reproduce the experimental response of SDFS with a better approximation. Also, Figure 14 shows coincidences and discrepancies between the experimental response and the fractional model; however, it presents a very good agreement.
The way to evaluate the robustness of the value of the exponent is optimal to reproduce the dynamic response of the SDFS. The responses monitored and obtained from the fractional solution with fractional exponents between to , using increments of are shown in Figure 13, where it indicates that the exponent has an important influence on the response, it also shows that the value of the fractional exponent remains the one that allows the best approximation. Note, by increasing the frequency from , the behaviour of SDFS, the fractional exponent continued to approach the experimental response better. Then, once the value of the exponent is defined, it retains its mechanical properties of SDFS and can continue to be used to calculate the response of the exponent but subject to similar excitations and with significantly different frequencies; the vibration characteristics of HSTTSD defects or incorrect mounting also contribute to generate of untoward vibration.
It is important to mention, the Figure 13 include the analytical integer solution obtained with the whole differential equation, A_Tf, and the analytical solutions calculated with the fractional differential equation solution, A_Tf, as well as the experimental measurements. This allows to directly compare the results. In general, the Figure 14 show the solution with the fractional differential equation is more attached to that recorded experimentally.
The results clearly show the direct effect of the value on the system response. For , the system behaves as a body without damping, while for , the damping of the system depends on the speed, ; so the body presents a behaviour as a viscous element. For intermediate values , complex responses are obtained since the term of the damping of the fractional differential equation jointly presents the characteristics of a stiffness and viscous body.
7. Conclusions
This research present an easy mathematical model capable to obtain the dynamic response of a SDFS of a fractional damping viscoelastic system, where the fractional derivative can be or any order. The experimental test presented above, its a justification to use a fractional calculus models of viscoelastic material behaviour is able to predict accurately the dynamic behaviour of SDFS during the test. The results of the simulation are compared with the experimental ones, concluding that the tendencies observed in the measurement have been reproduced. In this particular case, the fractional derivative is found to be or order .
To achieve competitive models it is necessary to create experimental models capable of representing the real world to compare, analyze and study its behaviour; in this particular case it was observed that the dynamic behaviour of S1GL should coincide with the whole ODEM; however, it did not happen that way, despite trying to make a perfect model and perform the experiment as best as possible. It is necessary to continue with experimental research and create models that are easy to apply and compare with reality using fractional calculus.
The need to generate results, from experimental results, and translate them to a theory is of vital importance. At present, this task is facilitated since it has had the support of numerical methods with which fractional differential equations can be solved, giving results similar to real systems without taking into account greater number of variables with more complex differential equations.
The research carried out allows to conclude that to use the fractional differential equations applied to truly representative models that are suitable to study and model the behaviour of the SDFS subjected to vibrations of any type. These conclusions can extend to problems in physical, engineering dependent on time such as propagation of waves in terrestrial media, fluid flow in porous media, consolidation of compressible soils, among others.
Author Contributions
All authors contributed equally to this work. All authors have read and agreed to the published version of the manuscript.
Funding
Not applicable.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data is available for publication.
Acknowledgments
CONACYT, Engineering Institute-UNAM, USI-Biblioteca. Francesco Mainardi, Federico J. Sabina, Ivan Argatov and Iakov A. Lyashenko.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Bagley, R. On the equivalence of the Riemann-Liouville and the Caputo fractional order derivatives in modeling of linear viscoelastic materials. Journal Fractional Calculus and Applied Analysis 2007, 10, 123–126. [Google Scholar]
- Carpinteri, A.; Mainardi, F. Fractals and Fractional Calculus in Continuum Mechanics; Springer: New York, 2014. [Google Scholar]
- Fenander, A. Modal synthesis when modeling damping by use of fractional derivatives. AIAA journal 1996, 34. [Google Scholar] [CrossRef]
- Kramer, S. Geotechnical Earthquake Engineering; Prentice Hall: New Jersey, 1996. [Google Scholar]
- Matlab 2005 Toolbox ninteger for Matlab, v.2.3. http://web.ist.utl.pt/duarte.valerio/ninteger/ninteger.
- Miller, K.S.; Ross, B. An introduction to the fractional calculus and fractional differential equations; Wiley, 1993. [Google Scholar]
- Mark, N. Linear fractionally damped oscillator. International Journal of Differential Equations 2010. [Google Scholar] [CrossRef]
- Oldham, K.; Spanier, J. The fractional calculus theory and applications of differentiation and integration to arbitrary order; Elsevier, 1974. [Google Scholar]
- Podlubny, I. An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Academic Press: Slovak Republic, 1999. [Google Scholar]
- Schiessel, H.; Blumen, A. Hierarchical analogues to fractional relaxation equations. Journal of Physics A: Mathematical and General 1993, 26, 5057. [Google Scholar] [CrossRef]
- Trujillo, J.; Scalas, E.; Diethelm, K.; Baleanu, D. Fractional Calculus: Models and Numerical Methods; World Scientific: New Jersey, 2016. [Google Scholar]
Figure 1.
Graph of the (z) function
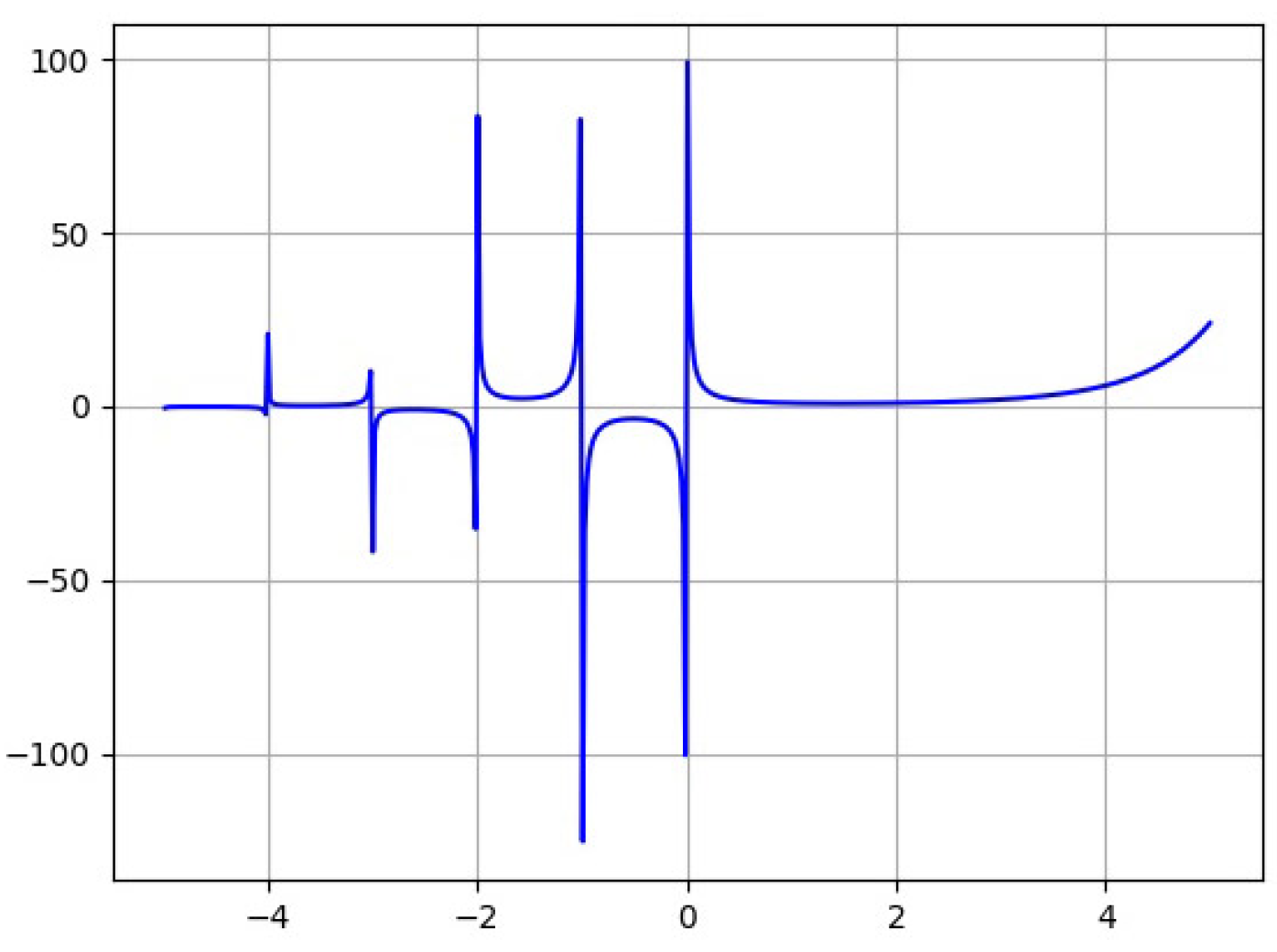
Figure 2.
View of a cosenoidal excitation signal
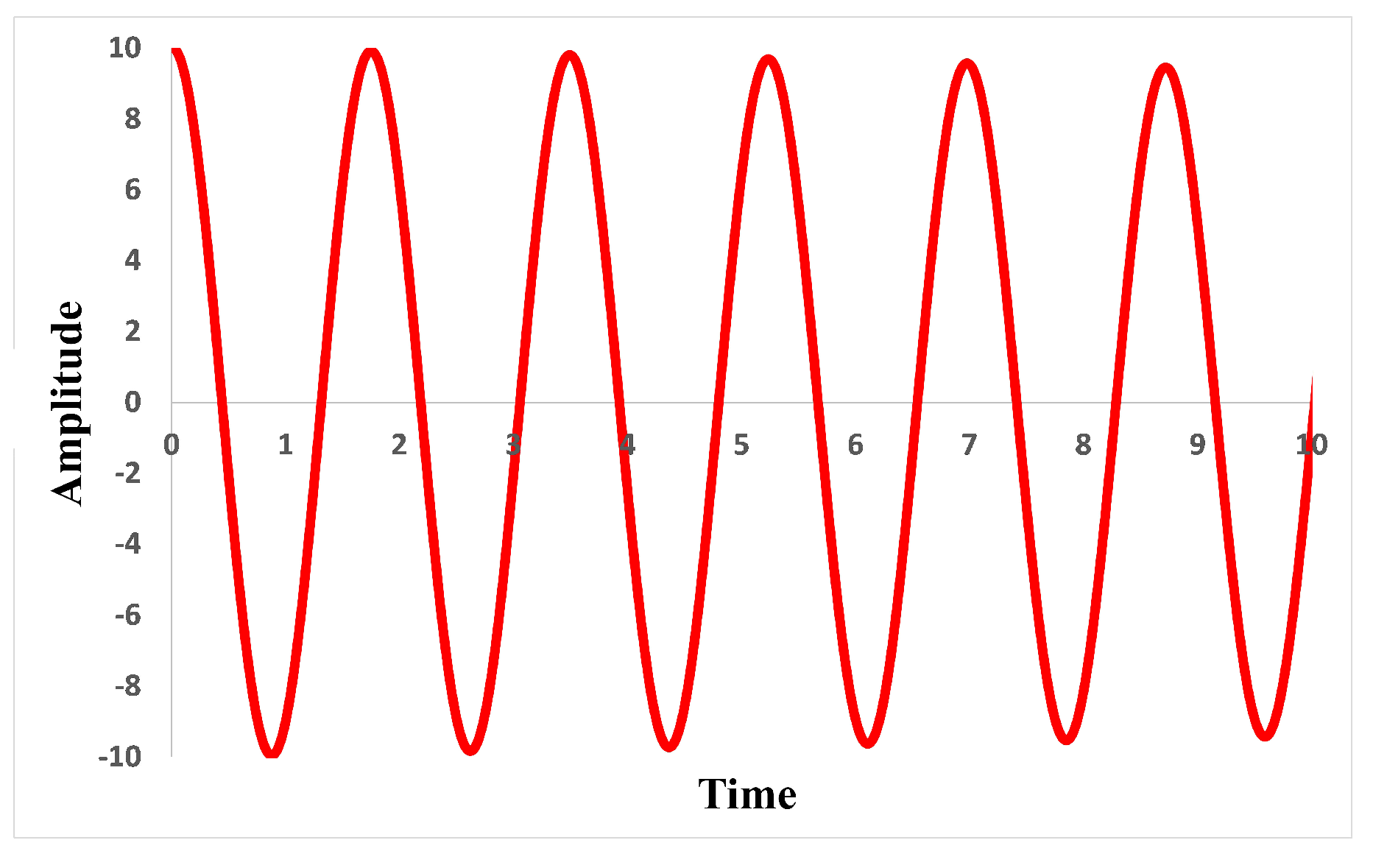
Figure 3.
View of a random excitation signal
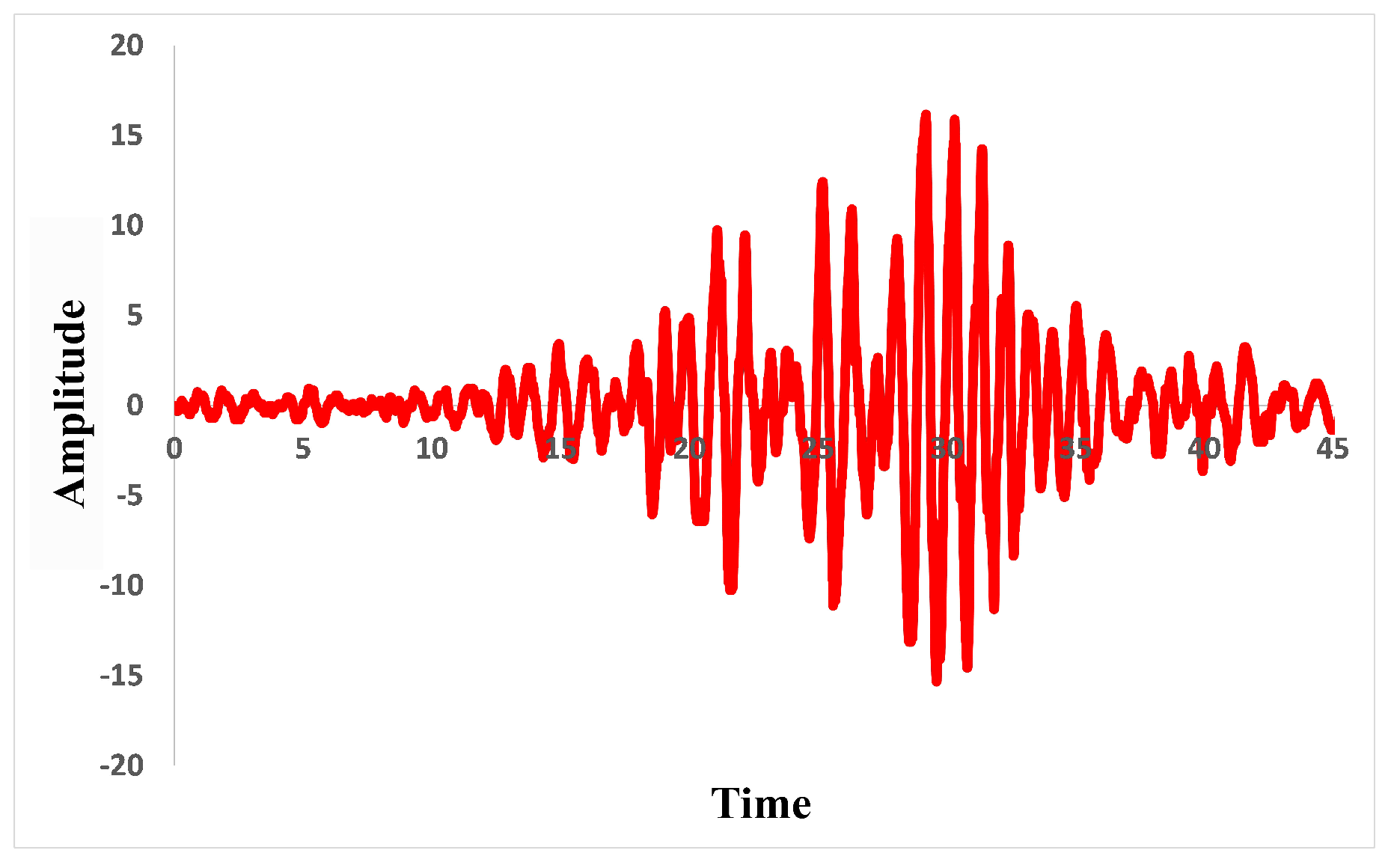
Figure 4.
Equivalence between the support bar and a stiffness spring k plus damp with damping c
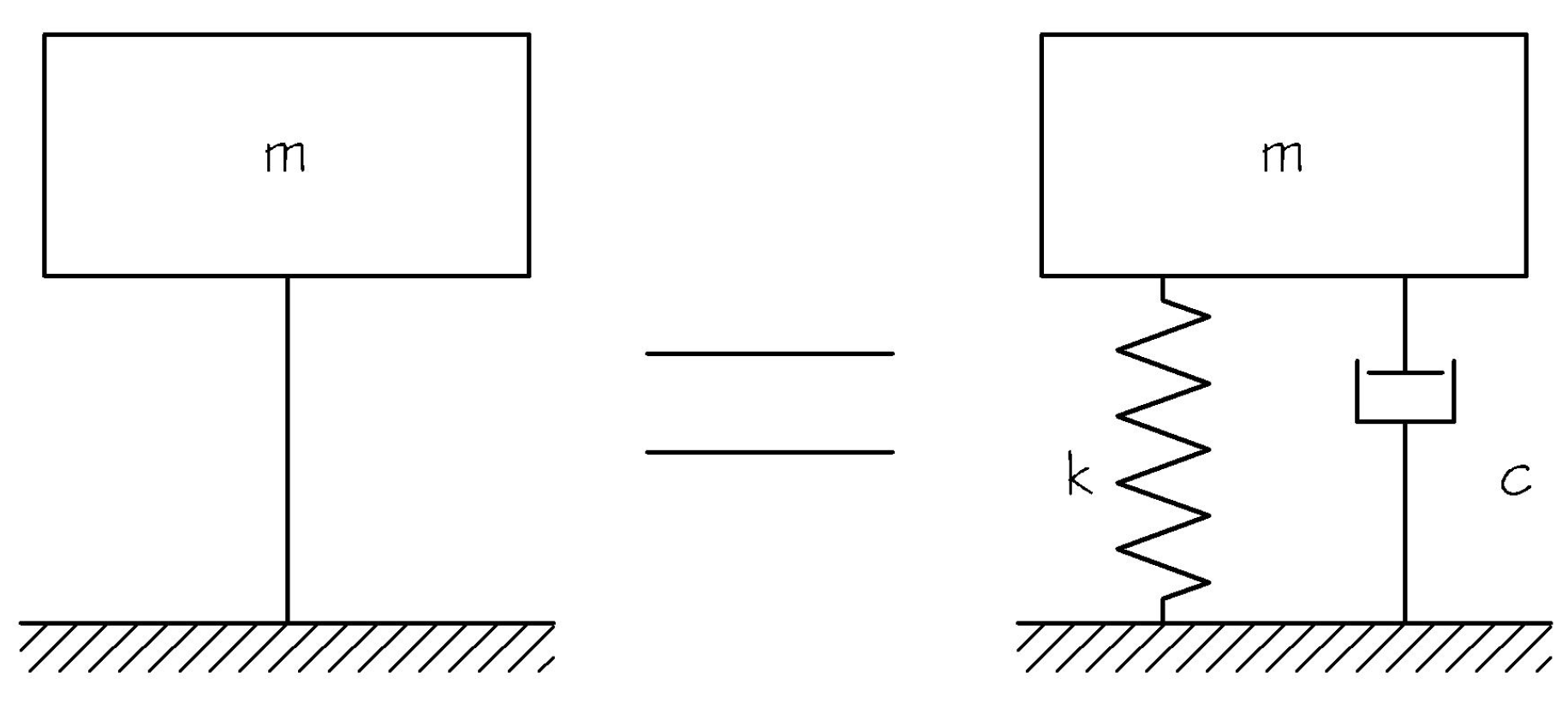
Figure 5.
SDFS damped supported to a shaking table
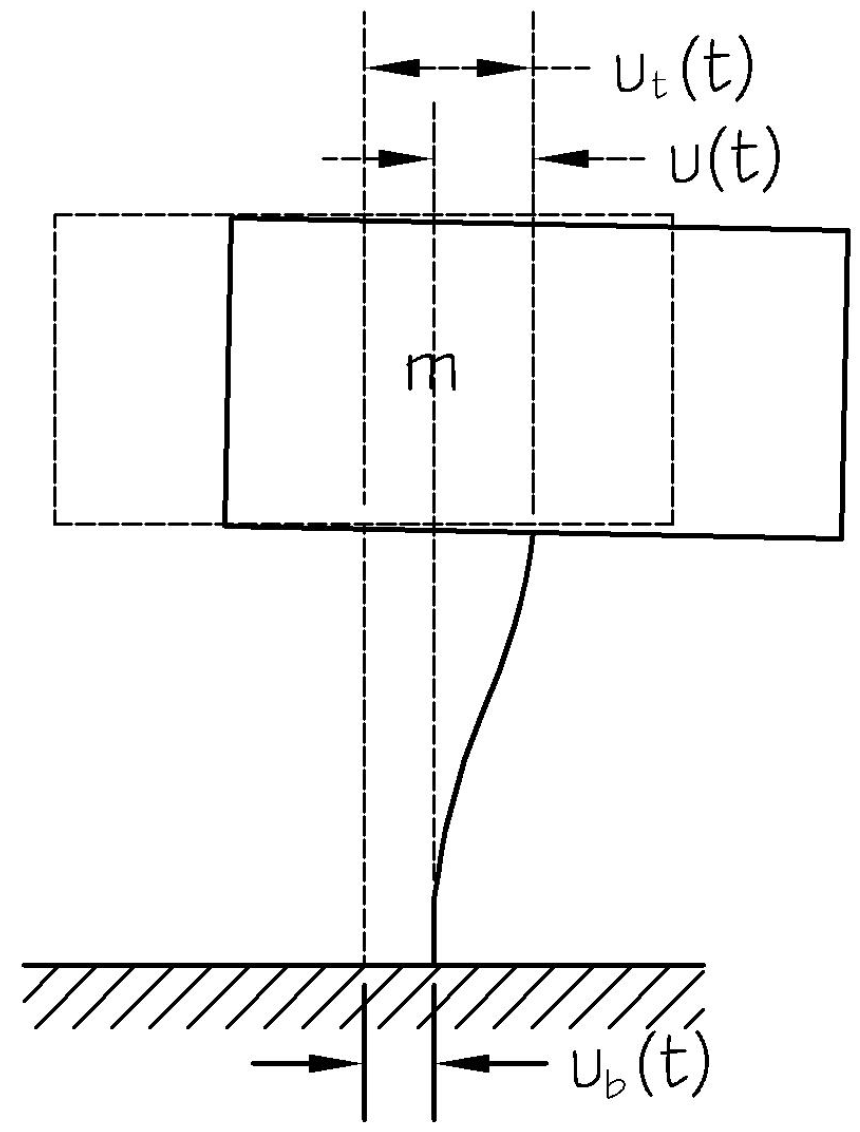
Figure 6.
Kelvin-Voigt rheological model
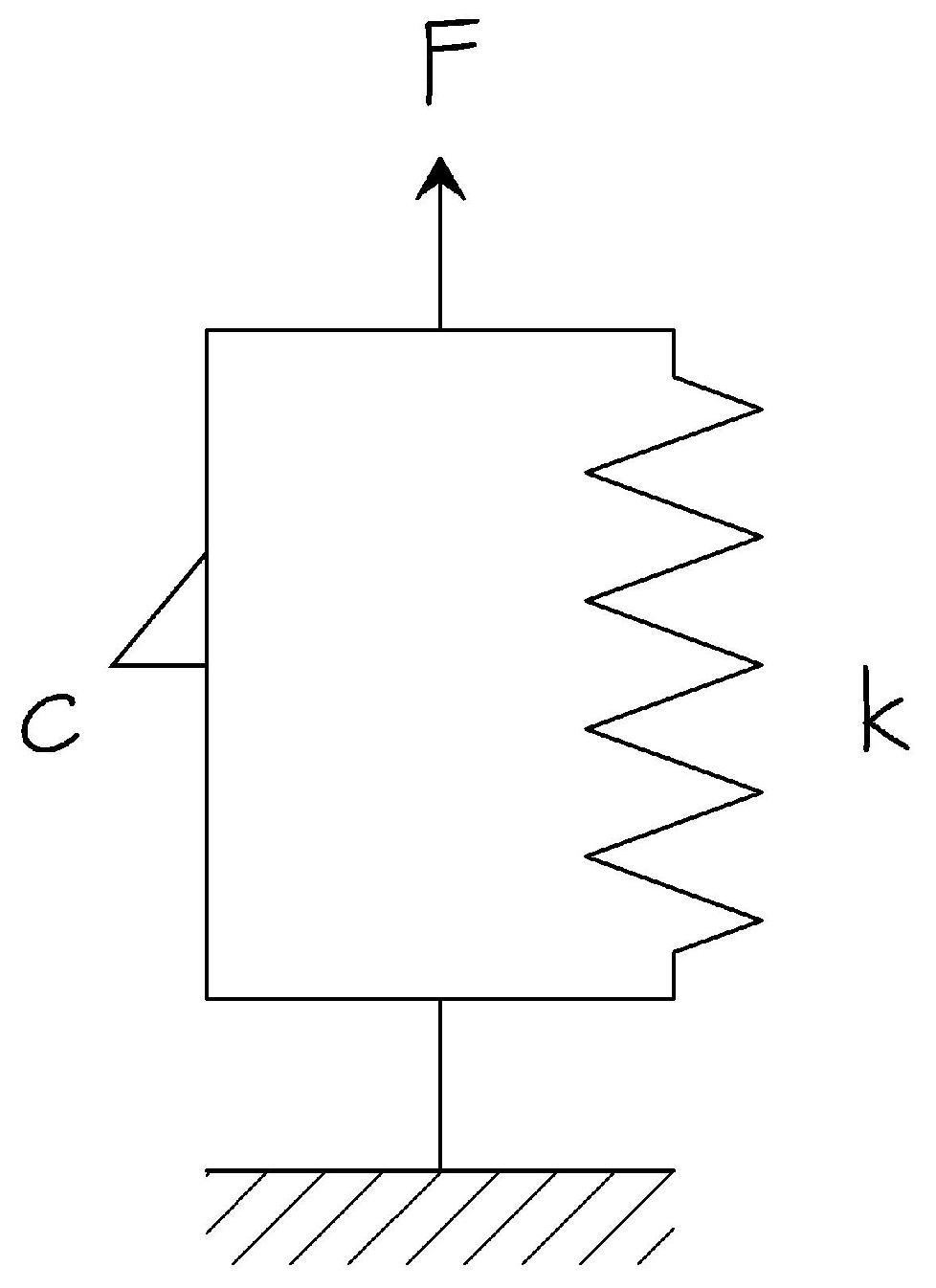
Figure 7.
Schematic Kelvin-Voigt rheological model of a fractional order element [10]
Figure 7.
Schematic Kelvin-Voigt rheological model of a fractional order element [10]
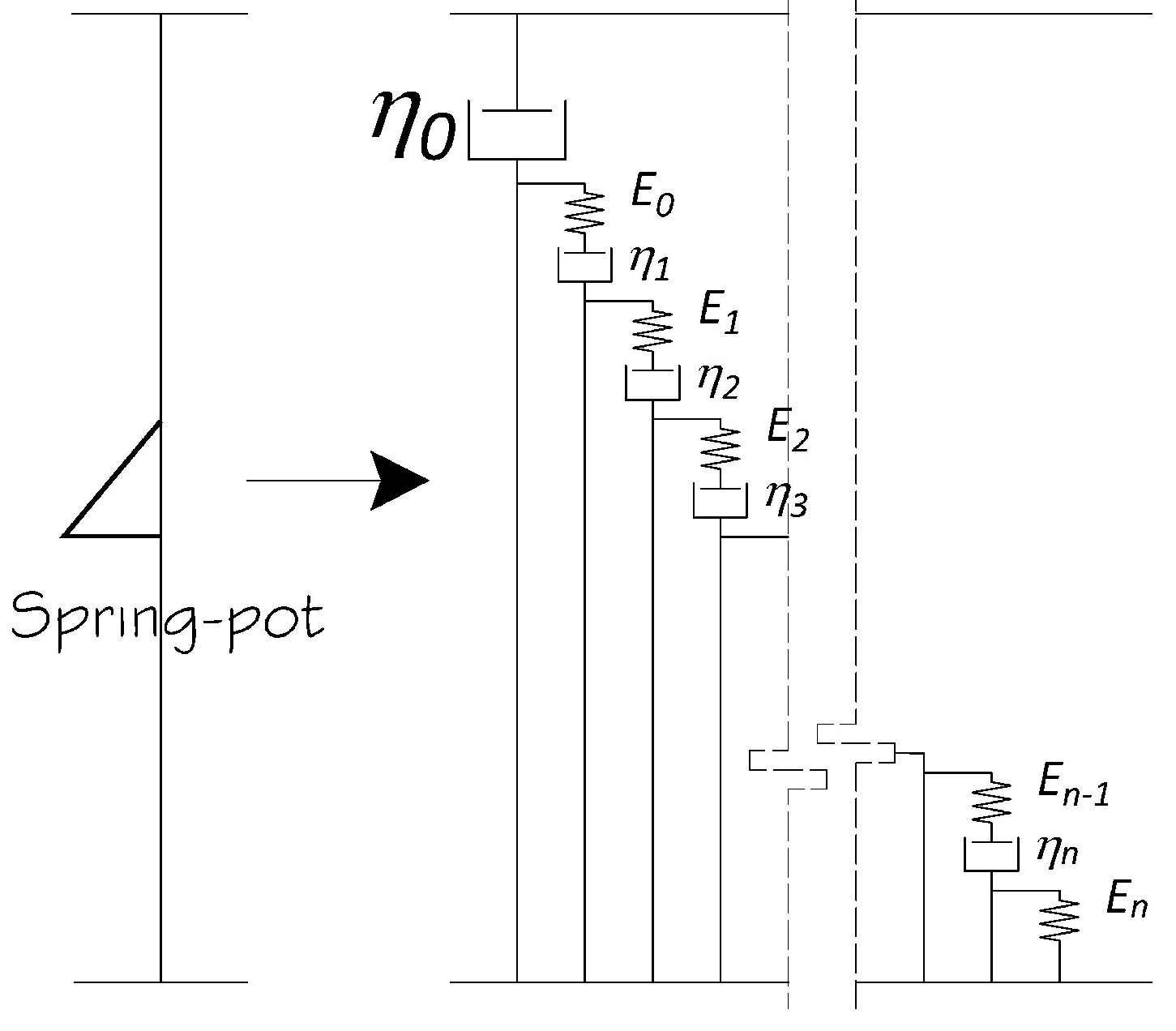
Figure 8.
Built-in SDFS view
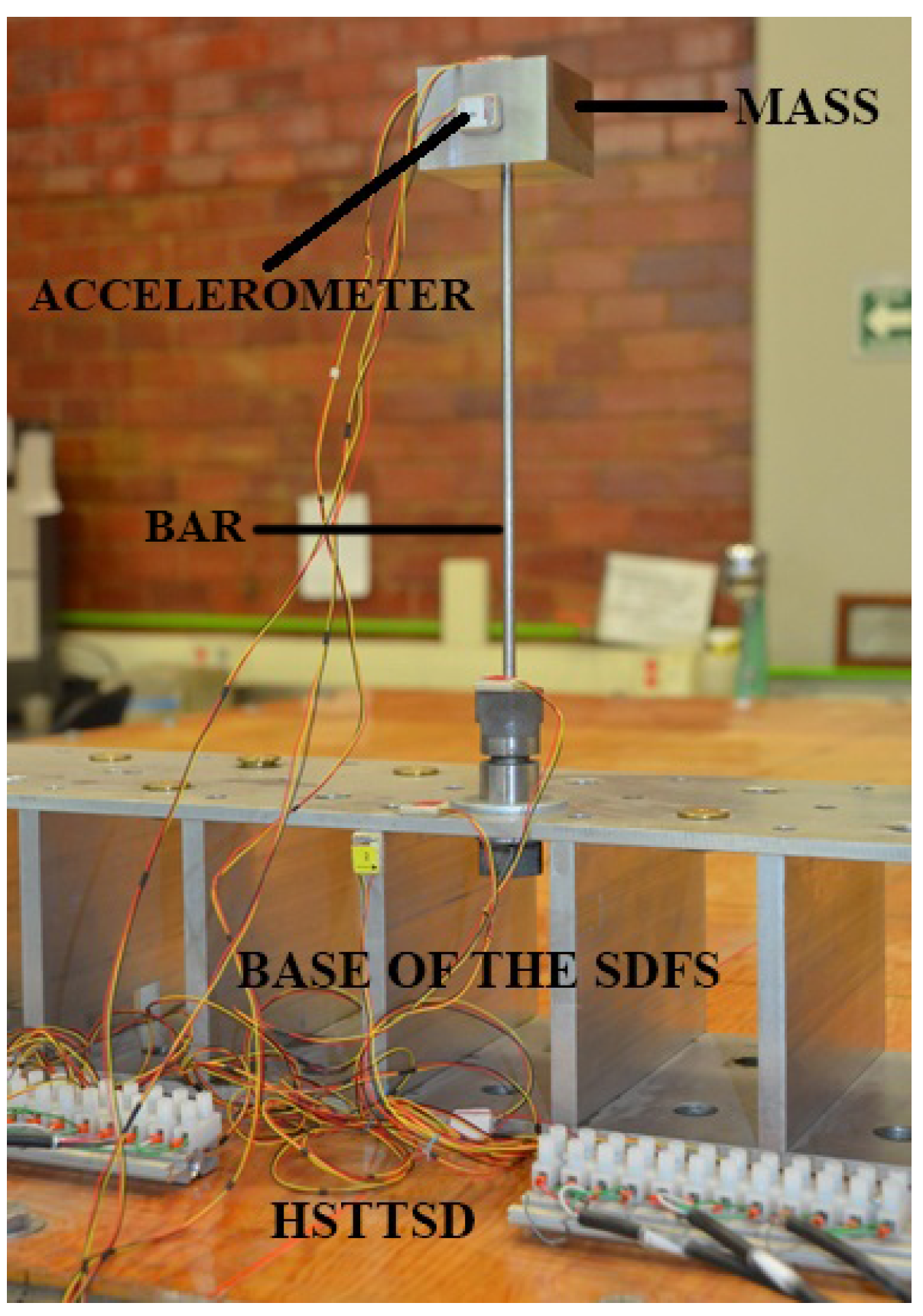
Figure 9.
Obtaining the weight of the mass of the SDFS
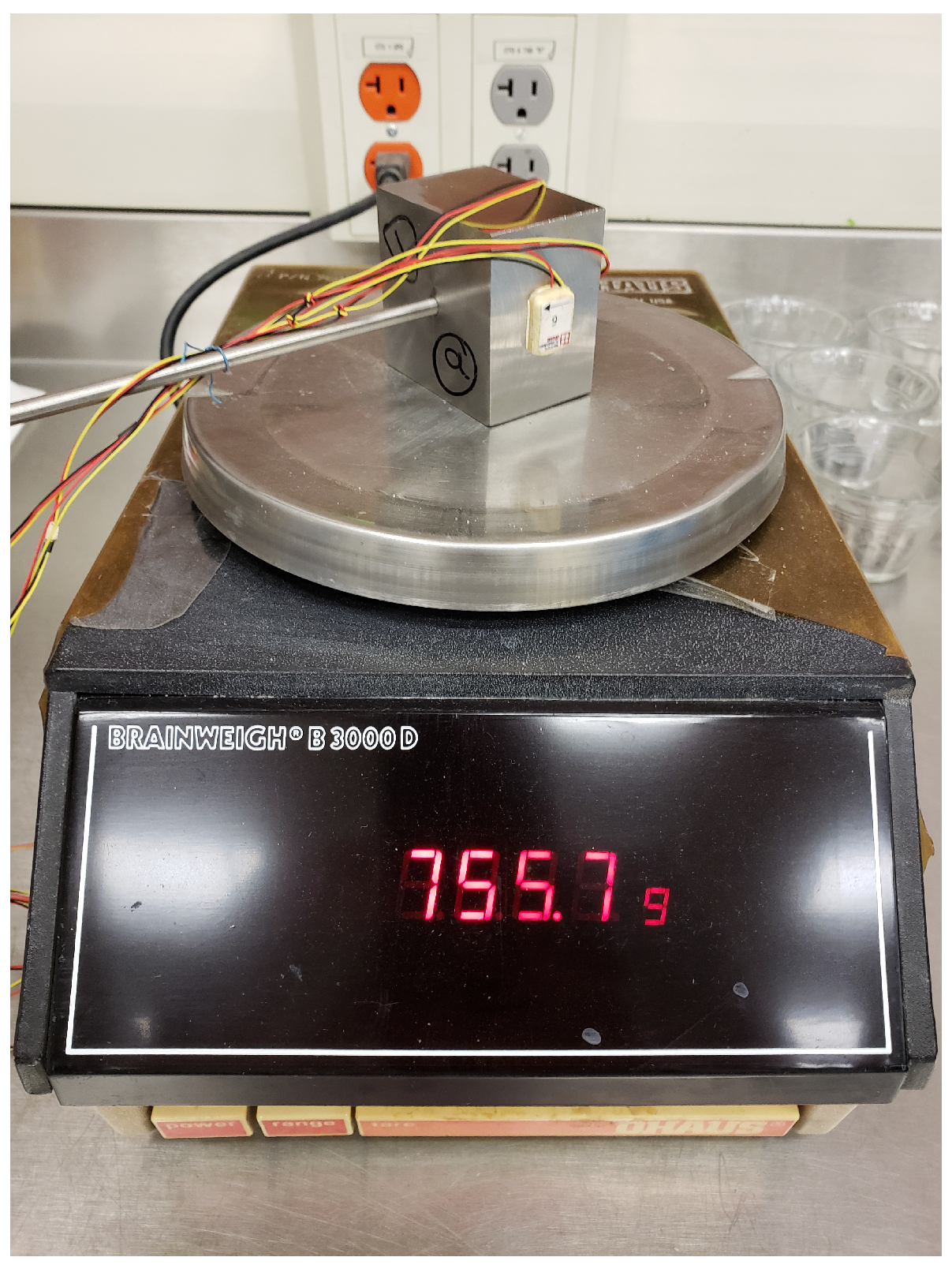
Figure 10.
Experimental vs theoretical comparison of the SDFS for a height of 13
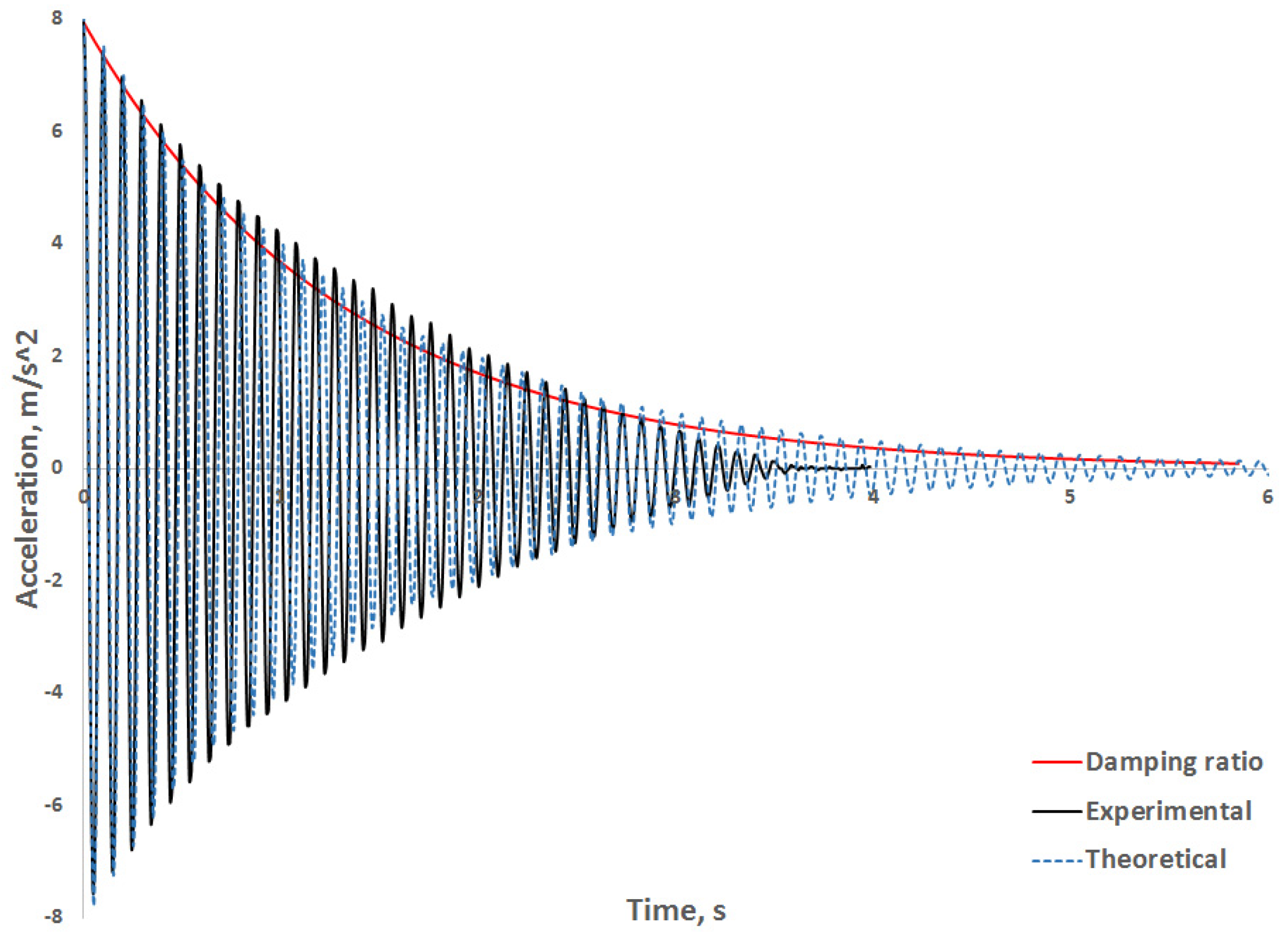
Figure 11.
HSTTSD displacement history of displacements using a frequency of
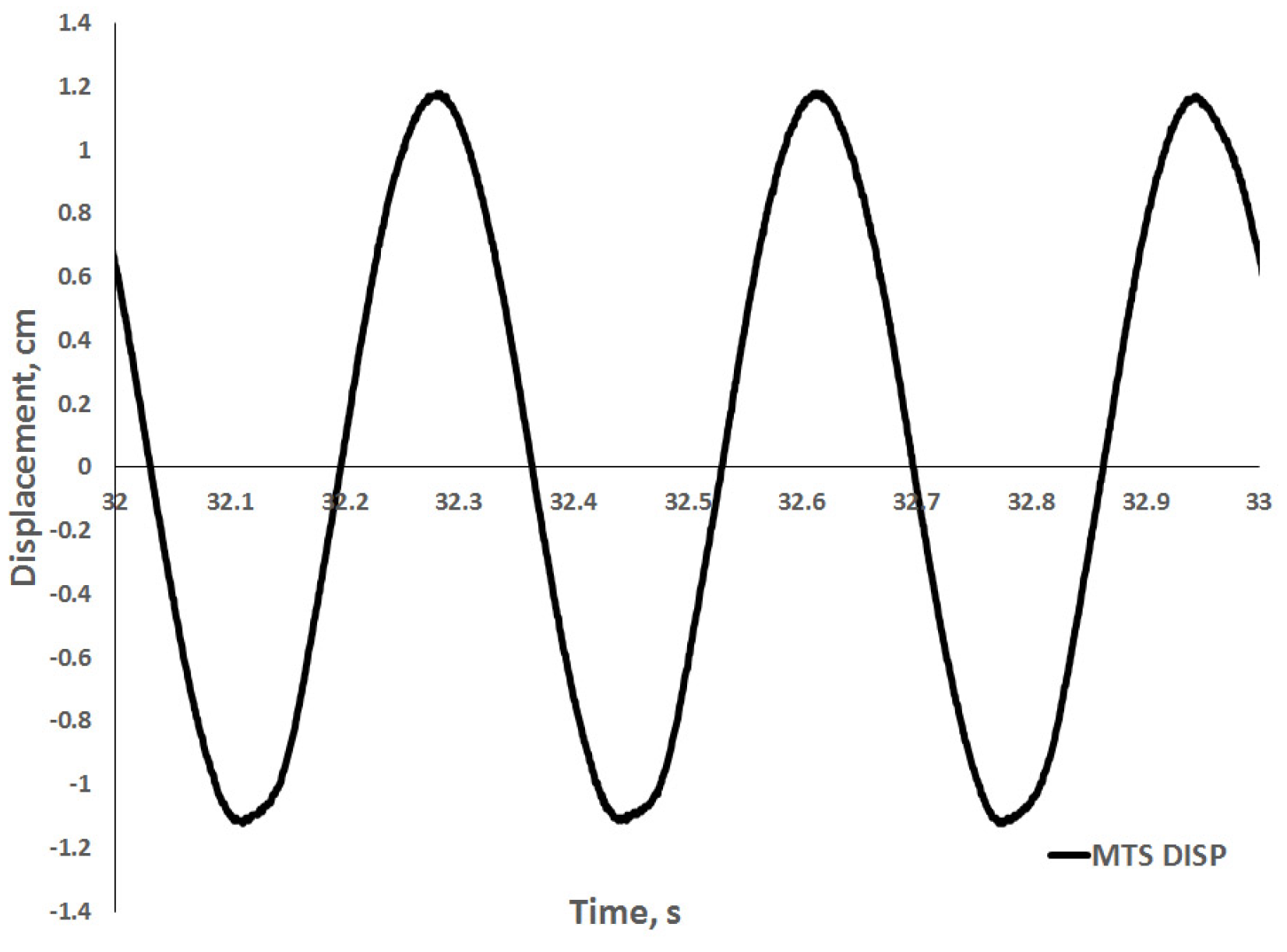
Figure 12.
History of HSTTSD accelerations and SDFS mass response using a frequency of
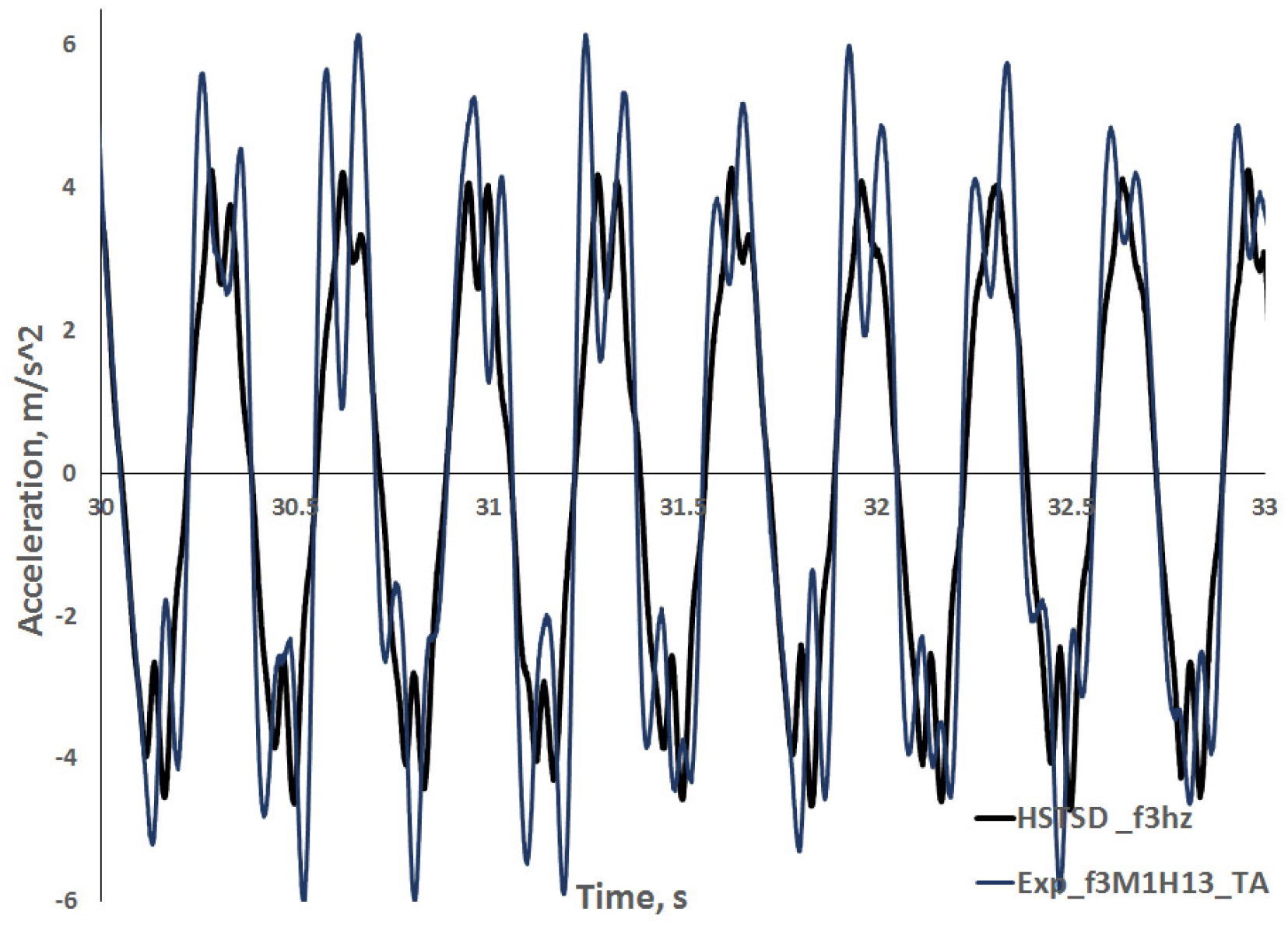
Figure 13.
Sample of a history of experimental and theoretical accelerations of mass vibration subjected to excitation with a frequency of in a range of 26 to 27 s and fractional exponents
Figure 13.
Sample of a history of experimental and theoretical accelerations of mass vibration subjected to excitation with a frequency of in a range of 26 to 27 s and fractional exponents
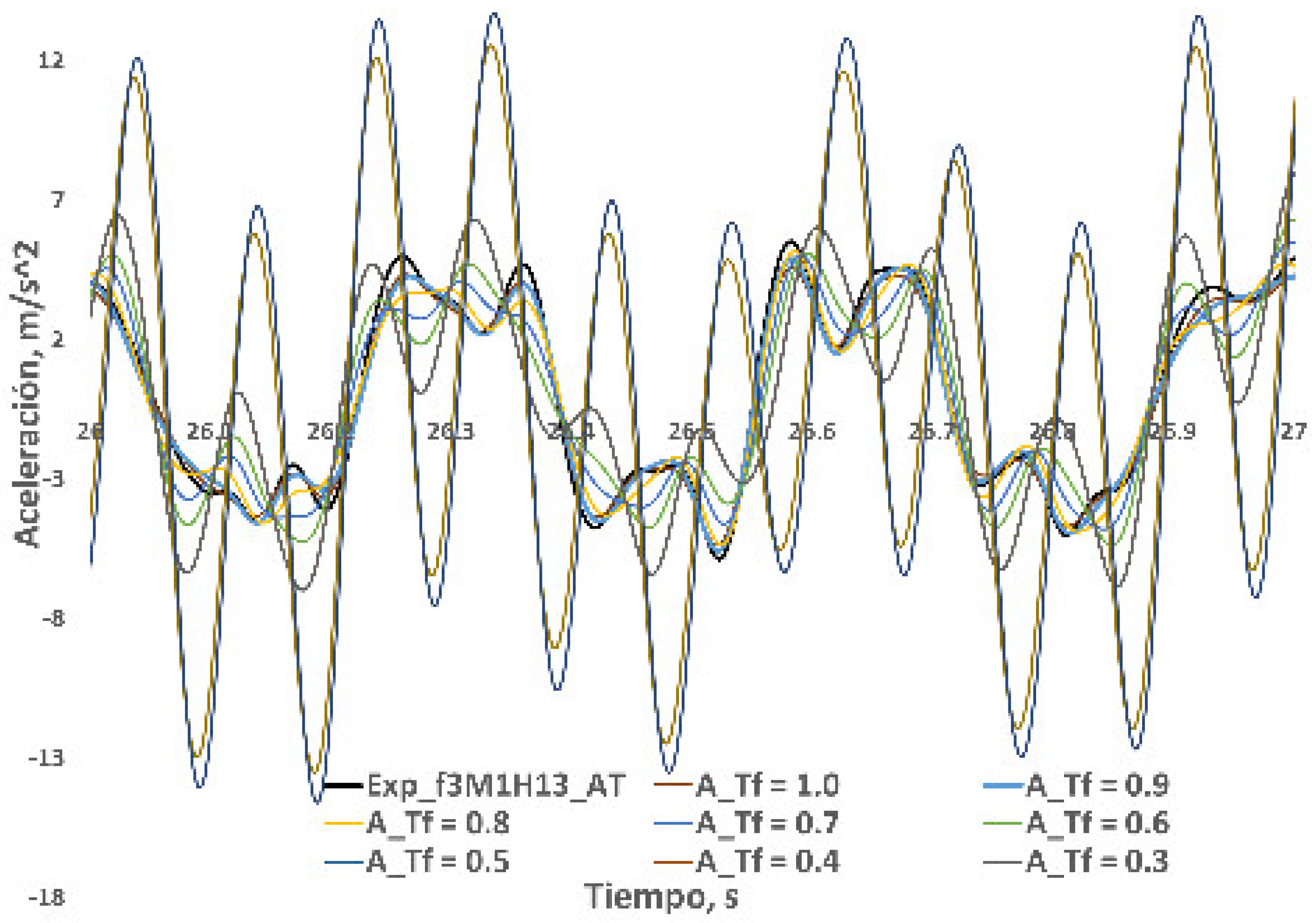
Figure 14.
Comparison of a history sample of total accelerations obtained from mass vibration, experimental and fractional numerical methods, ; using a frequency of , in the range of 26 to 27 s
Figure 14.
Comparison of a history sample of total accelerations obtained from mass vibration, experimental and fractional numerical methods, ; using a frequency of , in the range of 26 to 27 s
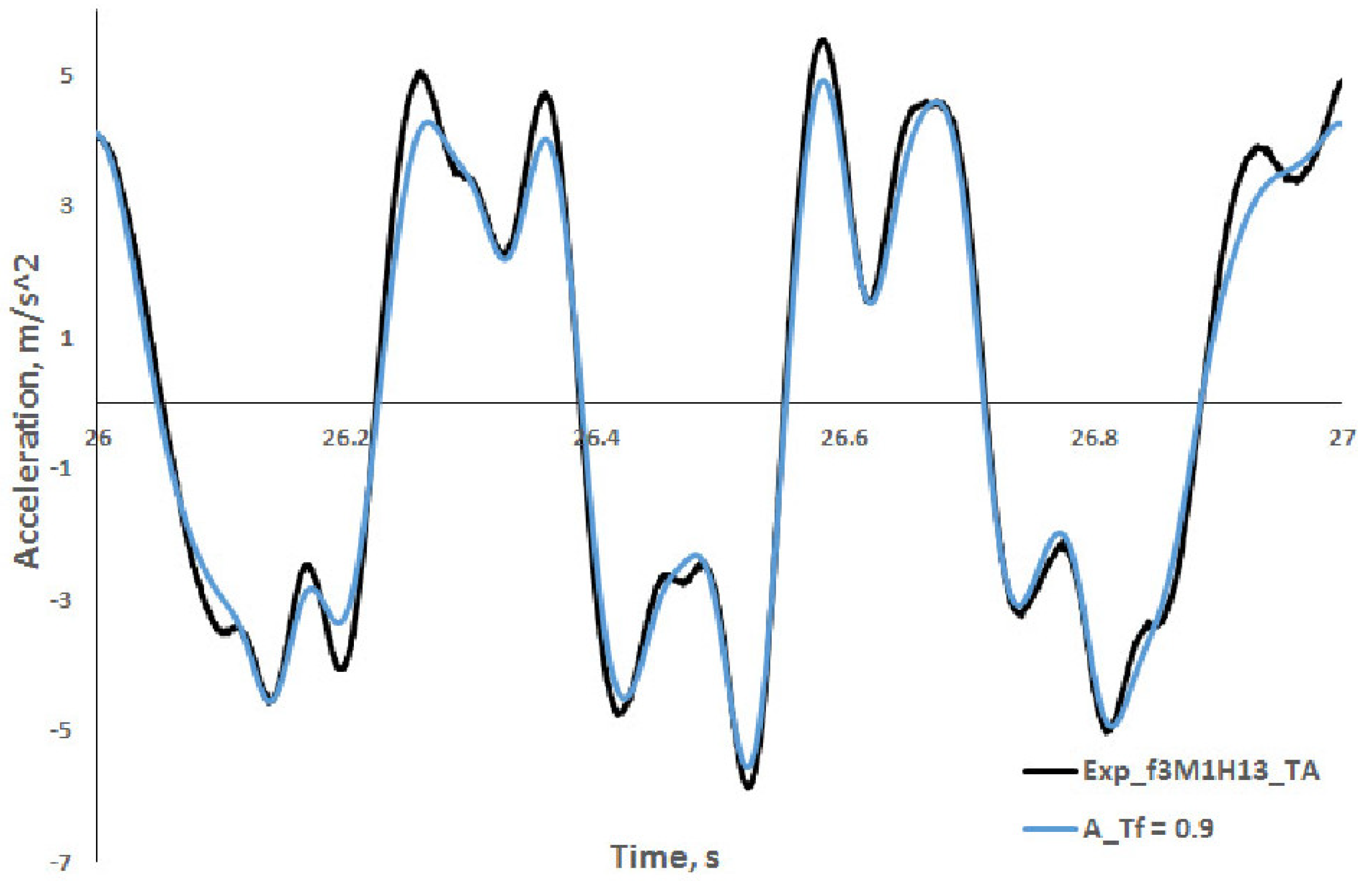

Table 1.
Results of the parameters obtained
| Test | Height | Mass, m | Damping, c | Stiffness, k |
|---|---|---|---|---|
| # | m | |||
| 1 | 0.0744 | 0.13 | 0.114902 | 308.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



