
Submitted:
19 January 2024
Posted:
23 January 2024
You are already at the latest version
Abstract
To identify the exchange coefficients of a nonlinear polynomial tricompartmental general system of α+β , we follow the procedure; firstly, the recommended solution is to introduce an adequate time t*>0 in a determinable manner. That is, after injecting quantity a into the main compartment, wait a moment for the exchange in the polynomial α+β order nonlinear general system to settle, and then compare this compartment to compartment 2 at t*. Secondly, applying the Taylor formula will linearize the system and identify the exchange coefficients. Finally, we will prove that the linearization method is stable.
Keywords:
Linear compartmental system
; Nonlinear compartmental system
; Inverse problem
; Identification
; Numerical analysis
; Ordinary differential equation
MSC: 34C35; 3402; 58F40; 9202; 92B05
1. Introduction
Nonlinear compartmental systems of polynomial type are encountered particularly in population dynamics. These systems are controlled by the following hypothesis: "The quantity passing from the compartment i to the compartment j is equal to ( if compartment j is outside environment ) where denotes the mass quantity of compartment i at time t and the exchange coefficient and , are constants characterizing the compartmental system. This so-called hypothesis of order polynomial exchange In the present study our aim is to identify the coefficients exchange of an open polynomial tricompartmental catenary system, using linearization process. The measurements given by the experimenter will be used in conjunction with a time delay technique to adapt the results obtained for identification in linear compartmental systems.
2. Definitions and Notations
We consider the nonlinear tricompartmental system of polynomial type, namely , shown in Figure 1.
The mass balance principle in each compartment leads to nonlinear differential equations (see [2]). The identification is done by exiting the system with and instantaneous injection of substance quantity a in the first compartment. Thus we can say that the tricompartmental catenary system is governed by the following differential system with initial condition:
we note :
The state function of the tricompartmental catenary system , is:
such that:
With these notations we can write the differential system (1) under the vectorial form:
3. Preliminary Study
The partial derivatives of the function F being:
and
The function F is differentiable in all point such that , and for all and all , and the Jacobian matrix is given by:
with:
For the linearization of the system (2) we apply the Taylor formula in the neighborhood of the initial condition .
Theorem 3.1.
1. F is not differentiable in if or .
- 2.
-
If and F is differentiable in . The Taylor formula applied in neighborhood of leads to:with: withFor t sufficiently small, we propose to approach the differential system (1) on by the following linear differential system:with
3.1. System Delay and Linearization of the System 1
For the system is then governed by the Cauchy problem:
The Taylor formula on the interval is given by:
with
such that:
and
we pose:
and
We can prove that there exists and such that:
Indeed
We apply the crammer method: we pose
we have so:
so we can write the differential system (4) in the equivalent form:
therefore:
the change of the state function of the tricompartmental system:
permits to reduce the system (4) to the canonical form:
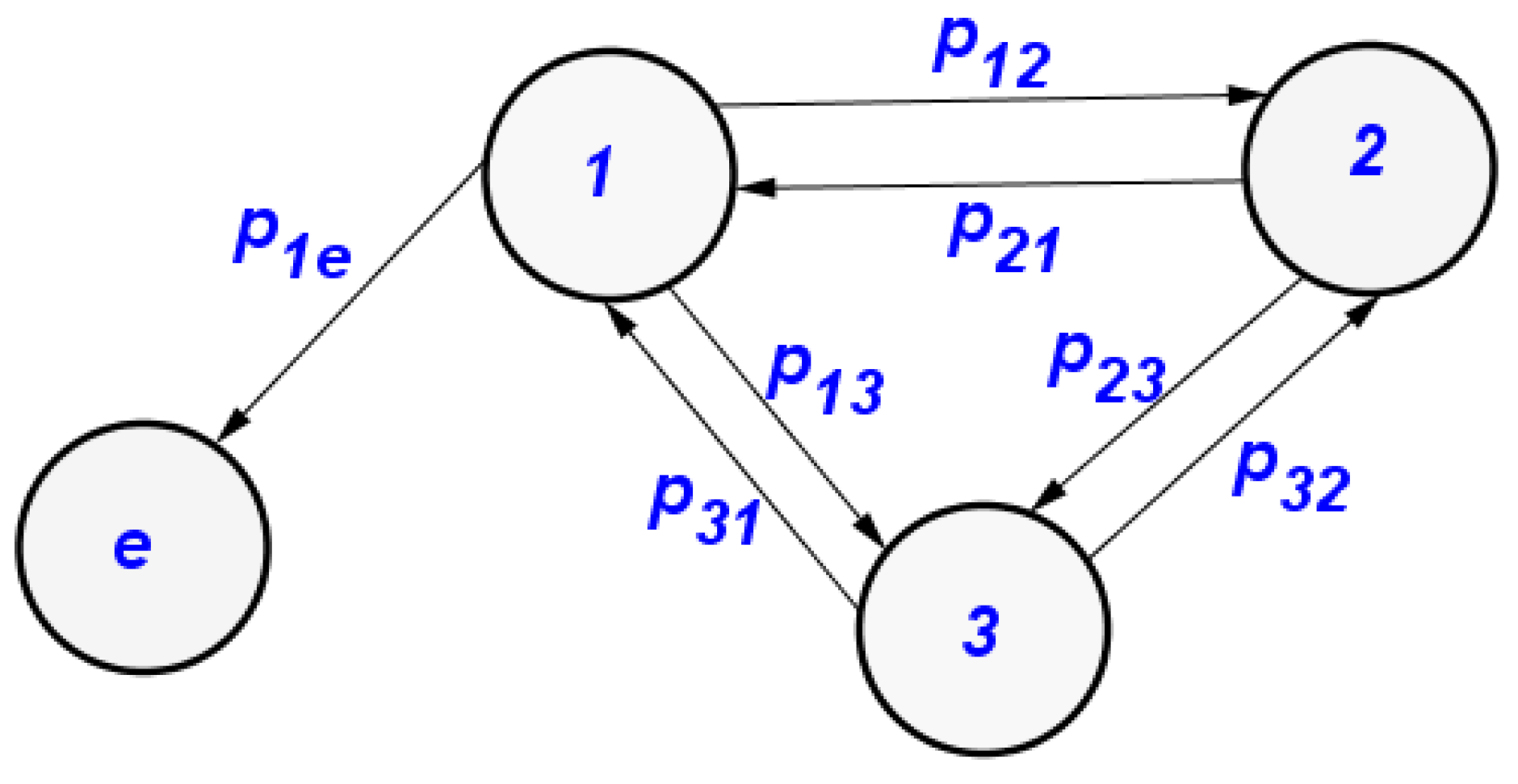
The matrix has the general form of a compartmental matrix, so to this matrix we can associate "formally" the compartmental linear system that we will note represented by the following figure:
with:
Proposition 1.
The real numbers , b and c such that the exchange coefficients is strictly than zero if and only if .
exist if and only if .
Proof.
Knowing that:
and
and
we pose:
then
then
if the set of solutions of the systems and is empty .
if the set of solutions of the systems and is not empty. □
4. Calculation of the Exchange Coefficients of the System and the Excretion Coefficient
Note the compartmental matrix of the linear model by:
The matrix A being tridiagonal and compartmental, its eigenvalues noted are real, distinct and strictly negative. The general solution of the system is written in the form
where is the j th column of the matrix B of the elementary masses, associated with the i compartment. The measurements made on the first and the second compartment make the minimization of the functional J introduced by Y.Cherruault [4] possible:
we put:
the functions defined by:
being linearly independent we can conclude that for every integer i in we have:The matrix A being tridiagonal and compartmental, its eigenvalues noted are real, distinct and strictly negative. The general solution of the system is written in the form
where is the j th column of the matrix B of the elementary masses, associated with the i compartment. The measurements made on the first and the second compartment make the minimization of the functional J introduced by Y.Cherruault [4] possible:
we put:
the functions defined by:
being linearly independent we can conclude that for every integer i in we have:
4.1. Calculating of Excretion Coefficient
4.2. Calculating the Exchange Coefficients
The relation (9) allows to write:
by multiplying both sides of the relation (18) by the number and the relation (19) by the number and by adding the two relations side by side, we obtain
and by multiplying both sides of the relation (19) by the number and the relation (20) by the number and by adding the two relations side by side, we obtain
which is equivalent to:
if then
such as
and the relation (10) allows to write:
by multiplying both sides of the relation (26) by the number and the relation (27) by the number and by adding the two relations side by side, we obtain
by multiplying both sides of the relation (27) by the number and the relation (28) by the number and by adding the two relations side by side, we obtain
so
if then
such as
and
and the relation (11) allows to write:
by multiplying both sides of the relation (31) by the number and the relation (32) by the number and by adding the two relations side by side, we obtain
and by multiplying both sides of the relation (32) by the number and the relation (33) by the number and by adding the two relations side by side, we obtain
so
if then
such as
and
Let’s put:
4.3. Calculating the Initial Condition c
The initial condition c is determined by:
Proof.
We have
and we have
and consequently
furthermore we have:
which equivalent:
and consequently:
which implies:
so
finally, we get:
□
4.4. Calculating the Exchange Coefficients
Proposition 2.
Let the associated partial matrix of measures to the system identified by (6) if then the system nonlinear is additionally identified
and
such as
Proof.
We have which implies that , and do not equal zero and we have
we apply Crammer’s method, we easily find the solutions □
5. Stability of the Linearization Method
For all we set and such that the exchange coefficients of a real linear compartmental system and note that the exchange coefficients of a real nonlinear compartmental system by
And note that the errors made on the calculation of and the errors made on the calculation of
and we set , and
Proposition 3.
We can approximate the exchange coefficients of nonlinear polynomial system by:
which represent the respective approximations of the exchange coefficients
Proof.
being an approximation of then there is such that:
and consequently:
□
Proposition 4.
being an approximation of then there exists such that:
and consequently
Which is equivalent to:
so
the relation (38) which is equivalent to:
the relation (40) which is equivalent to:
which is equivalent to:
as a result
so
Proposition 5.
therefore
and
Theorem 5.1.
see [7] We have:
so
Conclusion 6.
The linear model associated to the non linear polynomial tricompartmental general system of order involves four important difficulties:
- 1.
- The initial condition at time does not permit to give a complete information about the model . A temporization is introduced to suppress this difficulty.
- 2.
- If this temporization is not modulated, the linear model is not necessarily real. We have shown that the measures done on the compartment 1 and on the compartment 2 permit to choose one measure at instant such that we can develop a linearization method.
- 3.
- The nonhomogeneous condition being unknown is identified form measures done on compartment 1 and on compartment 2.
- 4.
- The linearization method is stable.
Author Contributions
All authors contributed equally to this work.
Funding
No funding applied in this work.
Data Availability Statement
All data generated or analyzed during this study are included in this published article.
Acknowledgments
The authors would like to thank the anonymous referees and the handling editor for their reading and relevant remarks/suggestions.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Cherruault, Y. Biomathématiques, Collection “Que sais-jeâ€. Presses Universitaires de France, (P.U.F), Paris, 1983, no 2052.
- Cherruault, Y. Modèles et méthodes mathématiques pour les sciences, du vivant; Presses Universitaires de France, (P.U.F) Paris; 1999.
- Cherruault, Y. Optimisation: Méthodes locales et globales; Presses Universitaires De France; 1999.
- Hebri, B., and Cherruault, Y. Direct identification of general linear compartmental systems by means of n − 2 compartments measures. Kybernetes 2005, 34.7/8, 969–982. [CrossRef]
- Hebri, B., and Cherruault, Y. Identification of a nonlinear polynomial compartmental system of α + β order by a linearization method. Mathematical Modelling and Analysis 2006, 11.2, 149–160.
- Hebri, B., and Cherruault, Y. New results about the identifiability of linear open bicompartmental homogeneous system and the identification of open Michaelis-Menten system by a linear approach. Kybernetes2005, 34.7/8, 1159–1186. [CrossRef]
- Hebri, B. Khelifa, S., and Cherruault, Y. Stability of the linearization method in compartmental analysis.Kybernetes 2009, 38.5, 744–761. [CrossRef]
- Schwartz, L. Etude de sommes d’exponentielles; Hermann; Paris; 1959.
- Sibony, M., and Mardon, J.Cl. Analyse numérique I; Hermann; 1982.
Figure 1.
:Nonlinear polynomial tricompartmental system
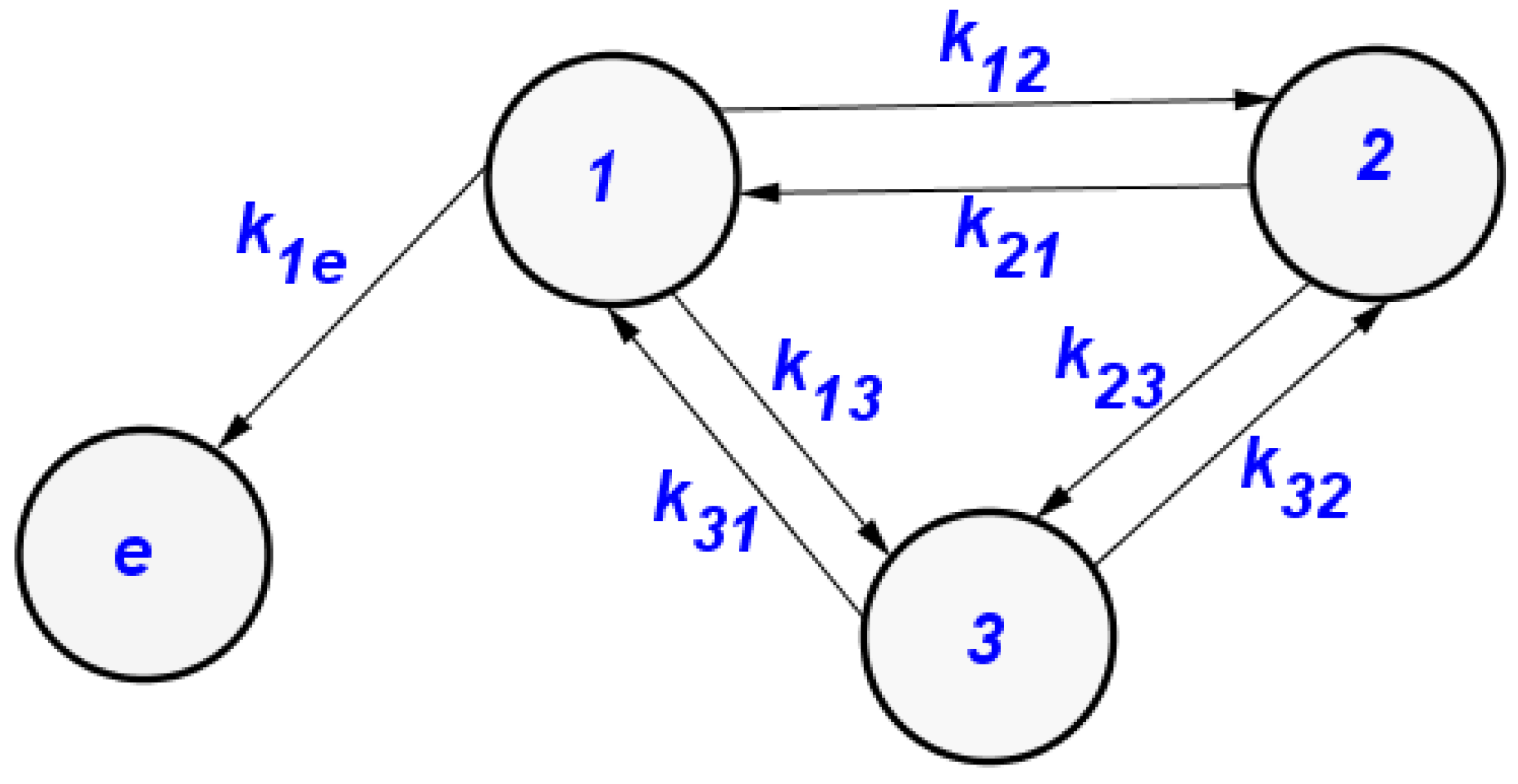
Figure 2.
:Linear Polynomial tricompartment System
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



