
Submitted:
27 January 2024
Posted:
29 January 2024
You are already at the latest version
Abstract
From a differential geometric perspective, information geometry (IG) aims to characterise the structure of statistical geodesic models. The research done for this paper offers a novel method for modelling the information geometry of a queuing system. From the perspective of IG, the manifold of the transient M/M/infinity queue is described in this context. The Fisher Information matrix (FIM) as well as the inverse of (FIM), (IFIM) of transient M/M/infinity QM are devised. In addition to that, new results that uncovered the significant impact of stability of QM on the existence of (IFIM) are obtained. Moreover, the Geodesic equations of motion of the coordinates of the underlying transient are obtained. Also, it is revealed that stable QM is developable (i.e., has a zero Gaussian curvature) and has a non-zero Ricci Curvature Tensor (RCT). Novel stability dynamics of transient M/M/iInfinity queue manifold is revealed by discovering the mutual dual impact between the behaviour of (RCT) and the stability(instability) phases of M/M/Infinity QM. Furthermore, a new discovery that presents the significant impact of stability of queue manifold and the continuity of the unique representation between M/G/1 queue manifold and Ricci Curvature Tensor (RCT). The information matrix exponential (IME) is devised. Also, it is shown that stability of the devised (IME) enforces the instability of M/M/ Infinity QM. More interestingly, novel relativistic info-geometric queueing theoretic links are revealed .
Keywords:
Transient
; information geometry (IG)
; statistical manifold (SM)
; M/M/ Infinity queue manifold (QM)
; Geodesic equations of motion
; Ricci Curvature (RC)
; Einstein Tensor
; Stress Energy Tensor
; Riemannian metric (RM)
; Fisher Information matrix (FIM)
; Inverse Fisher Information matrix (IFIM)
; threshold theorem
1. Introduction
Numerous study areas, including statistical inference, stochastic control, and neural networks, have extensively used IG (c.f., Mageed et al, 2023). In other words, the goal of IG is to use statistics to apply the methods of differential geometry (DG).
A manifold (c.f., Mageed and Kouvatsos, 2021) is a topological finite dimensional Cartesian space, , where one has an infinite-dimensional manifold. In Figure 1, the parameter inference of a model from data can be interpreted as a decision-making problem(c.f., Nielsen, 2020).In (Mageed et al, 2023; Mageed and Zhang 2022), the exponential distribution families were investigated with many variations.
In this paper, a study is undertaken of the geometric structure of the stable queue manifold (QM). To our knowledge, there is only one research paper (c.f., Nakagawa, 2002), which studied the IG of a stable M/D/1 queues, where a geometric structure was introduced on the set of queues by employing the properties of queue length paths. This point of view motivated the novel track of the research of this paper linking IG with information matrix theories towards a new re-interpretation of the transient M/M/ queue.As far as we are aware, just one study paper (cf. Nakagawa, 2002) has looked at the IG of stable queues and added a geometric structure to the collection of these queues by utilising the features of queue length pathways. This point of view served as the motivation for the original research strategy in this study, which connected information matrix theories with IG to create a novel understanding of the transient queue.
In the context of this paper, Ricci curvature (c.f., Nielsen, 2020) evaluates the deviation of the Riemannian metric (RM) from the standard Euclidean metric (EM), and scalar curvature measures the deviation for the volume of a geodesic ball from the volume of a Euclidean ball of the same radius (c.f., Figure 2).
2. Main Definitions
2.1. Main Definition on IG
Definition 2.1.
Statistical Manifold (SM)
We call a manifold(c.f., Mageed et al 2023) of n-dimensional distribution with coordinate system .
Definition 2.2.
Potential Function
The potential function (c.f., Mageed et al 2023) is the distinguished negative function of the coordinates alone of (). Fundamentally, is the part of which only contains
Definition 2.3.
FIM
FIM (namely, [])is given by the Hessian matrix i.e.,
Definition 2.4.
IFIM
IFIM(namely, []) reads as(Dodson, 2005)
The corresponding arc length function is:
Definition 2.5.
-Connection
For each the (or )-connection (c.f., Dodson, 2005) is the torsion-free affine connection with components:
where is the potential function and = .
Definition 2.7.
- (1)
- The geodesic equations of manifold M with coordinate system are defined by (c.f.,Mageed et al 2023)
- (2)
- The geodesic equations(c.f., Lecture Notes, 2005) that characterize the curves that minimize the length/energy between two arbitrary points on a smooth manifold M.
- (3)
- The total energy (c.f., Malham, 2016) of a path = , between and , can be defined in terms of a Lagrangian function as followsThe path that minimizes the total energy necessarily satisfies the Euler–Lagrange equations. Here these take the form of Lagrange’s equations of motion:for each In the following, we use (the inverse Fisher Information Matrix, FIM) to denote symmetric positive matrix (Fisher Information Matrix FIM) (where ) so that:
- (4)
- Lemma (2.7.4)(Geodesic equations). Lagrange’s equations (c.f., Malham, 2016) of motion for the Lagrangian
Lemma 5 (Geodesic equations).
Lagrange’s equations of motion for the Lagrangian
are given in local coordinates by the system of ordinary differential equations:
where the quantities
are known as the Christoffel symbols and for .
By the above definition, it is clear that the geodesic equations are interpreted physically as the information geometric equations of motion , shortly (IGEMs), or the relativitstic equations of motion (REMs) , or the Riemannian equations of motion. At this stage, it is important to note that this report is the first time ever which sets ground breaking discovery of the IG analysis of transient queueuing systems in comparison to that of non-time dependent queueing systems, namely IG analysis of stable queueues (c.f., Mageed and Kouvatsos, 2019,2021).
Definition 2.8.
1.Under the coordinate system, the Tensors, (c.f.,Li, Sun, Tao, and Jiu, 2007) are defined by
where
2. The curvatures (Ricci Tensors) are determined by (c.f., Mageed et al 2023)
3. The are defined by (c.f., Mageed et al 2023)
Specifically, if the = is called and is given by(c.f., Mageed et al 2023)
4. The Ricci Tensor (c.f., Loveridge, 2016) is simply a contraction of the Riemannian Tensor (c.f.,Mageed et al 2023).
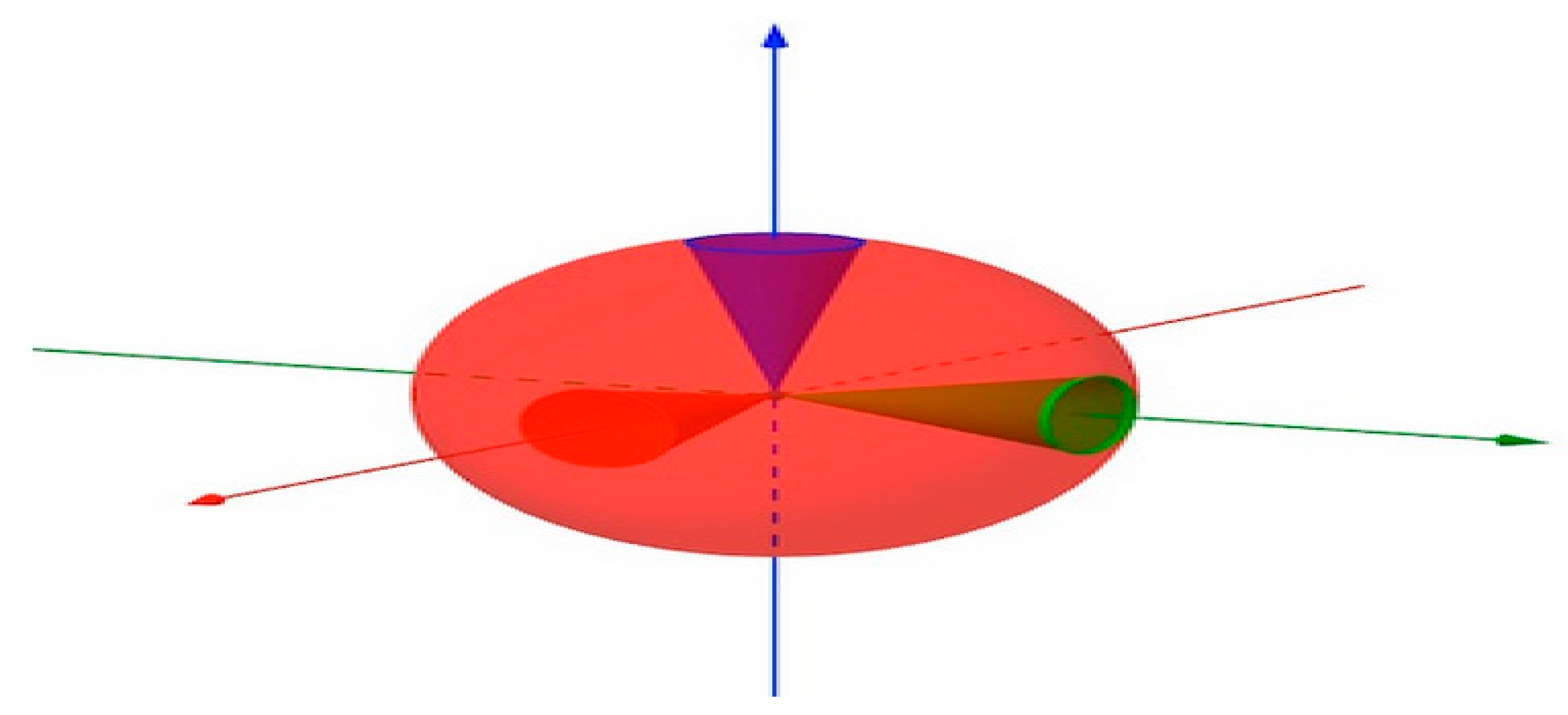
5.The Ricci curvature Tensor (RCT)(c.f., Rudelius, 2012) of an oriented Riemannian Manifold M means the extent to which the volume of a geodesic ball on the surface differs from the volume of a geodesic ball in Euclidean space.
6. The Ricci curvature (RCT) (c.f., Ollivier, 2010) contracts the evolution of volumes under the geodesic flow. When Ricci curvature is positive, then according to the Bonnet Myers theorem (c.f., Ollivier, 2010) the Riemannian manifold is more positively curved than a sphere and the diameter of the manifold is smaller.
Figure 3.
(RCT) describes how conical regions in the manifold differ in volume from the equivalent conical regions in Euclidean space (c.f., Thomas, 2015).
Figure 3.
(RCT) describes how conical regions in the manifold differ in volume from the equivalent conical regions in Euclidean space (c.f., Thomas, 2015).
Definition 2.10.
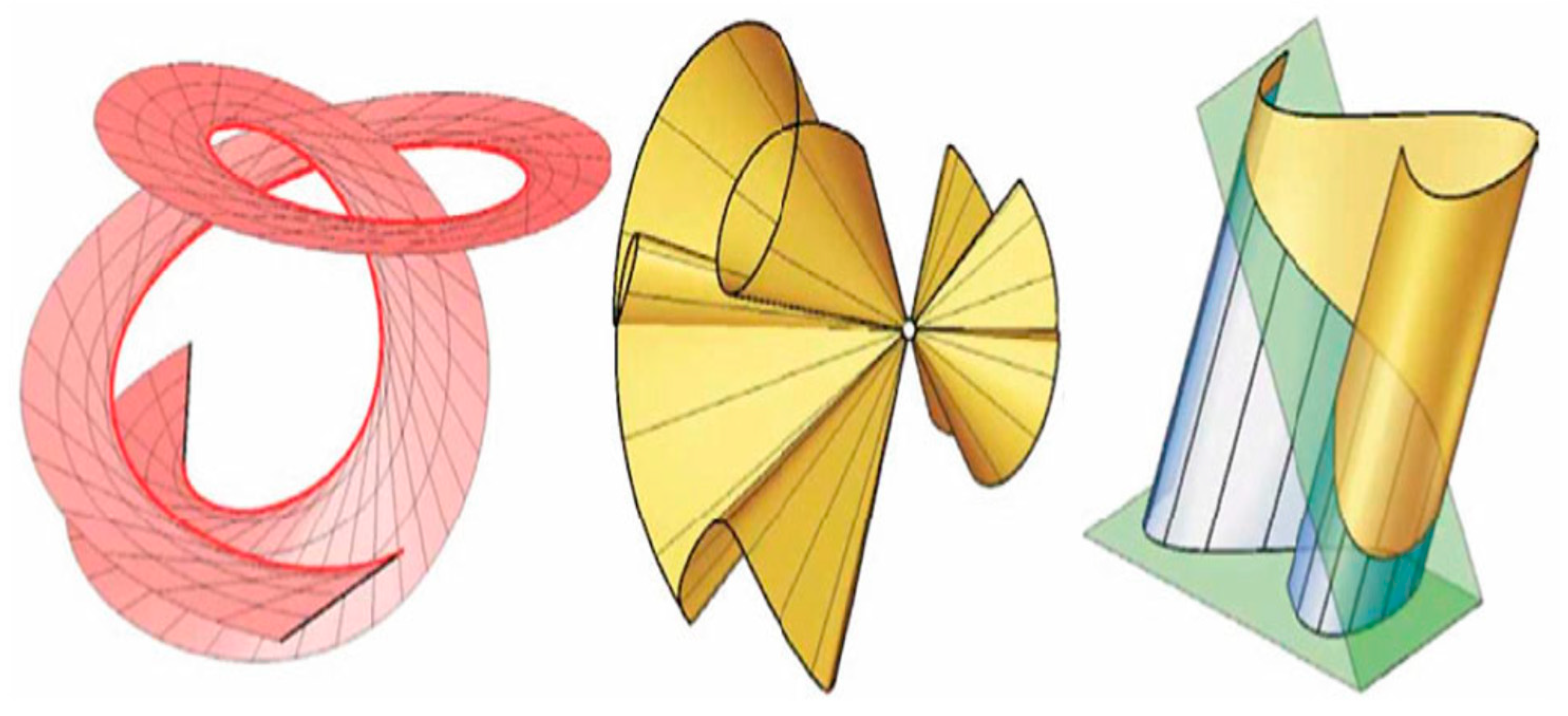
(i) A certain category of ruled surfaces called developable surfaces can be mapped onto a plane surface without causing any deformation to the curves; each curve drawn from such a surface onto the flat plane retains its original shape (c.f., Snezana, 2011).
Figure 4.
Three kinds of developable surfaces: Tangential on Figure 5a (on the left), Conical on Figure 5b (on the centre) and Figure 5c (on the right), Cylindrical. Note that curves in bold are directrix or base curves and straight lines in bold are directors or generating lines (curves) (c.f., Snezana, 2011).
Figure 4.
Three kinds of developable surfaces: Tangential on Figure 5a (on the left), Conical on Figure 5b (on the centre) and Figure 5c (on the right), Cylindrical. Note that curves in bold are directrix or base curves and straight lines in bold are directors or generating lines (curves) (c.f., Snezana, 2011).
Definition 2.12 (c.f., Weisstein, 2013).
1.A function is well-defined if it gives the same result when the representation of the input is changed without changing the value of the input.
Definition 2.13 (c.f., Sankaranarayanan, 2014).
1. function f is said to be one-to-one, or injective, if and only if implies for all x, y in the domain of. A function is said to be an injection if it is one-to-one. Alternative: A function is one-to-one if and only if , whenever x ≠ y. This is the contrapositive of the definition.
2.Afunction f from A to B is called onto, or surjective, if and only if for every there is an element such that . Alternative: all co-domain elements are covered.
3. Afunction f is called a bijection if it is both one-to-one (injection) and onto (surjection).
Preliminary Theorem(PT) 2.15 (Horan and Lavelle, 2005).
Let fbe a function that is defined and differentiable on an open interval (c,d).
(1) If for all ,then f is increasing on (2.15)
(2) If for all , then f is decreasing on (2.16)
Taylor expansions (c.f., Shaw, 2015) are widely used to approximate functions by expansions. We have for all around zero,
2.4. Important Inequalities (c.f., Kozma, 2020)
1. Chebyshev inequality
(2.35)can be rewritten as
2. Lehmer inequality
3. The FIM and ITS Inverse for the Transient QM
In queueing theory, a discipline within the mathematical theory of probability, the queue (c., f., Harrison et al, 1993) is a multi-server queueing model where every arrival experience immediate service and does not wait.
The transient probability of the queueuing system with (c.f., Kumar et al, 2014) and exponentially distributed service time with mean and arrival rate is given by:
It has been pointed out by Conolly and Langaris (1993) that one of the best-known Bessel function forms for the time- dependent state probabilities in M/M/1/ system is given by:
Theorem 3.1.
For the transient formalism of M/M/ queueuing system, we have
(i) (c.f., (2.1)) reads as
where
Provided that, . refers to the temporal derivative .
(iii) IFIM reads as
where
Proof.
(i)Following (3.1), we have:
Hence, we have
Thus,
Therefore, the Fisher Information Matrix, FIM, is obtained (c.f., (3.3)).
We write IFIM as
Thus,
Notably, the symmetry requirement should hold for FIM. Meanwhile, it is observed that FIM (c.f., (3.3) of Theorem 3.1) is not symmetric, since and . This raises many open problems on such novel phenomenon and shows the significant impact of time as a coordinate in the potential function (c.f., (3.23). it is inevitable to investigate under what conditions will FIM be symmetric. The following theorem answers this question.
Theorem 3.2.
For the transient formalism of M/M/ queueuing system, as time approaches infinity, FIM (c.f., (3.3) of Theorem 3.1) is symmetric. The converse statement is not always true.
Proof.
It is sufficient to prove that if ,
, it holds that
Consequently, the corresponding FIM given by
which is symmetric.
To investigate the necessity requirement:
Let and . This generates the following two sets of equations:
and
(3.37) reduces to:
This implies:
or
Similarly, (3.38) reduces to (3.40) and
Clearly, it follows from (3.40),
(3.41) generates the following differential equation:
It could be verified that and are two solutions of (3.44).
The reader can check that (3.42) reduces to
It could be verified that is the closed form solution of (3.45). Proof completed.
Theorem 3.2.
For the transient formalism of M/M/ queueuing system, as time approaches infinity, (c.f., (3.12) of Theorem 3.1) does not exist if and only if one of following requirements is satisfied:
or
or whenever are solutions of the following differential equation:
Proof.
Following Matrix Algebra, does not exist if and only if Therefore, will never exist if and only if [ =0, equivalently
if and only if
Or
Clearly, (3.49) implies (c.f., (3.46)).
It could be verified that and are two solutions of (3.47).Moreover in (3.47) implies , a family of families of temporal straight lines. As time reaches infinity, the arrival rate in this case becomes infinite. This completes the proof.
In the following section, the components of (or )- connection are obtained and it will be shown that the algebraic structure of this connection is no longer symmetric as in the non-time dependent case. This unexpected phenomenon is justified by strong impact of the time coordinate relating to the time-dependency. Also, it is shown that for sufficiently large temporal values(i.e., ), the generated special case of (or )- connection is symmetric. All these genuine contributions are new to the knowledge to both information geometry and queueing theorists. These calculated expressions are needed to obtain the corresponding Geodesic Equations (GEs) of the parametric coordinates of QM.
4. Theα(. OR )-Connection of the Transient QM
4.1. The obtained expressions (c.f., definition (2.5)) of the transient QM
By definition (2.5), the reader can check that:
Engaging the same approach, the remaining expressions can be obtained.
5. OF THE TRANSIENT QM WHEN TIME IS INFINITE
5.1. Geometry of QM as
Now, we are in a situation to reveal the significant temporal impact on the overall IG analysis of the underlying M/M/ QM. This would be clear as time approaches infinity and in this phase; the FIM will be symmetric which not the case was before as time was not infinite. This also reflects upon the paths of motion of the corresponding geodesic equations of motion for each coordinate of the underlying QM.
Setting in (3.4)-(3.10), we have
with
5.2. The expressions of the coordinate, of the transient QM corresponding to infinite temporal values
Similarly, the remaining components at infinite temporal can be obtained.
6. The IMES of the Coordinates THE Transient QM WHEN TIME IS INFINITE
6.1. The of the coordinate, of the transient M/M/∞ QM
The IMEs (c.f.,(2.7)) corresponding to the coordinate, of the transient M/M/∞ QM are , Now, we are in a situation of trying to find the path of motion of family of families of IMEs corresponding to the arrival rate coordinate,
Without any loss of generality, let , so (6.1) reduces to
At (5.1)-(5.8) reduce to
This implies that (5.13) and (5.16) reduce to
Consequently,
(6.13) implies, with a closed form solution .This explains that characterize the path of motion of the arrival rate coordinate of QM. By (6.13), . Let implying. Therefore, we have the closed form solutions represented by the family of families,
This supports a strong evidence that the corresponding paths of motion of the arrival rate for the Poisson arrival rate are devised by family of families .This explains that or
6.2. The of the coordinate, of the transient M/M/∞ QM
The IMEs (c.f.,(2.7)) corresponding to the coordinate, of the transient QM are: ,
Now, we are in a situation of trying to find the path of motion of family of families of IMEs corresponding to the Poisson arrival rate coordinate, As , we have:
Setting , we have
The resulting IMEs corresponding to is represented by family of families of paths of motions given by
By (6.40)-(6.42), we have (6.43) in the form:
The complicated equation (6.44) can be rewritten in the form:
We can put (6.45) into the more compact form:
The family of families of constant paths of motion of the Poisson arrival rate given b y, provide a closed form solution of (6.45)
6.3. The of the coordinate, of the transient QM
The IMEs (c.f.,(2.7)) corresponding to the coordinate, of the transient QM are: ,
Setting ,
with
The IMEs of time, for are given by = 0
or = 0, implying either
or
This implies :
Or
Following (6.62), we have
Consequently, it follows that:
(6.64) holds if and only if
or
Or
By (6.68), we have
It could be verified that (6.69) has a closed form solution devised by
The obtained result in (6.70) is quite new and interesting as it shows that for sufficiently large temporal values, this generates two unexpected values of the Poisson arrival rate, namely , or .
At this stage, we need to provide more analysis of the obtained result:
We have by (6.46)-(6.52) and (5.18),
Combining (6.67) and (6.71), implies either . This means that within the obtaind phase of (6.67), either the Poisson arrival rate vanishes, or we will be in a situation where the corresponding velocity of the Poissonian arrival rate is infinite.
7. The Threshold Theorems for the Potential function (c.f., (3.23) of Theorem 3.1) of the Underlying transient M/M/∞ QM
7.1. The Threshold Theorem for the Potential Function, TTPF (c.f., (3.23) of Theorem 3.1)
Based on the Preliminary Theorem (PT) , the threshold theorem for the potential function, (c.f., (3.23) of Theorem 3.1) corresponding to each coordinate is devised.
Theorem 7.1.
For the obtained potential function (c.f., (3.23) of Theorem 3.1), the following holds
i) is forever increasing in
ii) is never increasing in
iii) is never decreasing in
iv) is forever decreasing in for all
v) is forever increasing in if and only if and temporal values satisfying:
vi) is never decreasing in
Proof.
i)We have
It holds that
if and only if one of the following statements is true:
The second statement is impossible since it contradicts the fact is positive. So, we have to accept the first statement, (7.2) implies , which is always true for all . This proves i).
As for ii), if and only if one of the following statements is true:
The second statement is impossible since it contradicts the fact is positive. So, we have to accept the first statement, (7.5) implies , which is never true for all . This proves ii).
iii) if and only if one of the following statements is true:
The first statement is impossible since it contradicts the fact is positive. Since, (7.6) implies , implying , a contradiction always true for all . Moreover, we have to reject the second statement, since is never permissible. This proves iii).
To show iv), if and only if one of the following statements is true:
The second statement is impossible since it contradicts the fact . So, we have to reject (7.9). The first statement, (7.9) implies , implying , which is always true for all . Also, holds for all . This proves iv).
v)We have . So, if and only if one of the following statements is true:
We have to reject (7.11) since is non- permissible. As for (7.10), holds. Furthermore, implies
Hence, holds. This proves v).
vi)We have . So, if and only if one of the following statement is true:
We must reject (7.14). (7.13) is true since holds for all . Moreover, we have
This provides a counter example generating the inequality,
A contradiction. Therefore, vi) holds.
In what follows,
,
7.2.1. Numerical Experiment One
The numerical observation in Figure 5 matches the analytic result (c.f., i) of Theorem 7.1).
Figure 5.
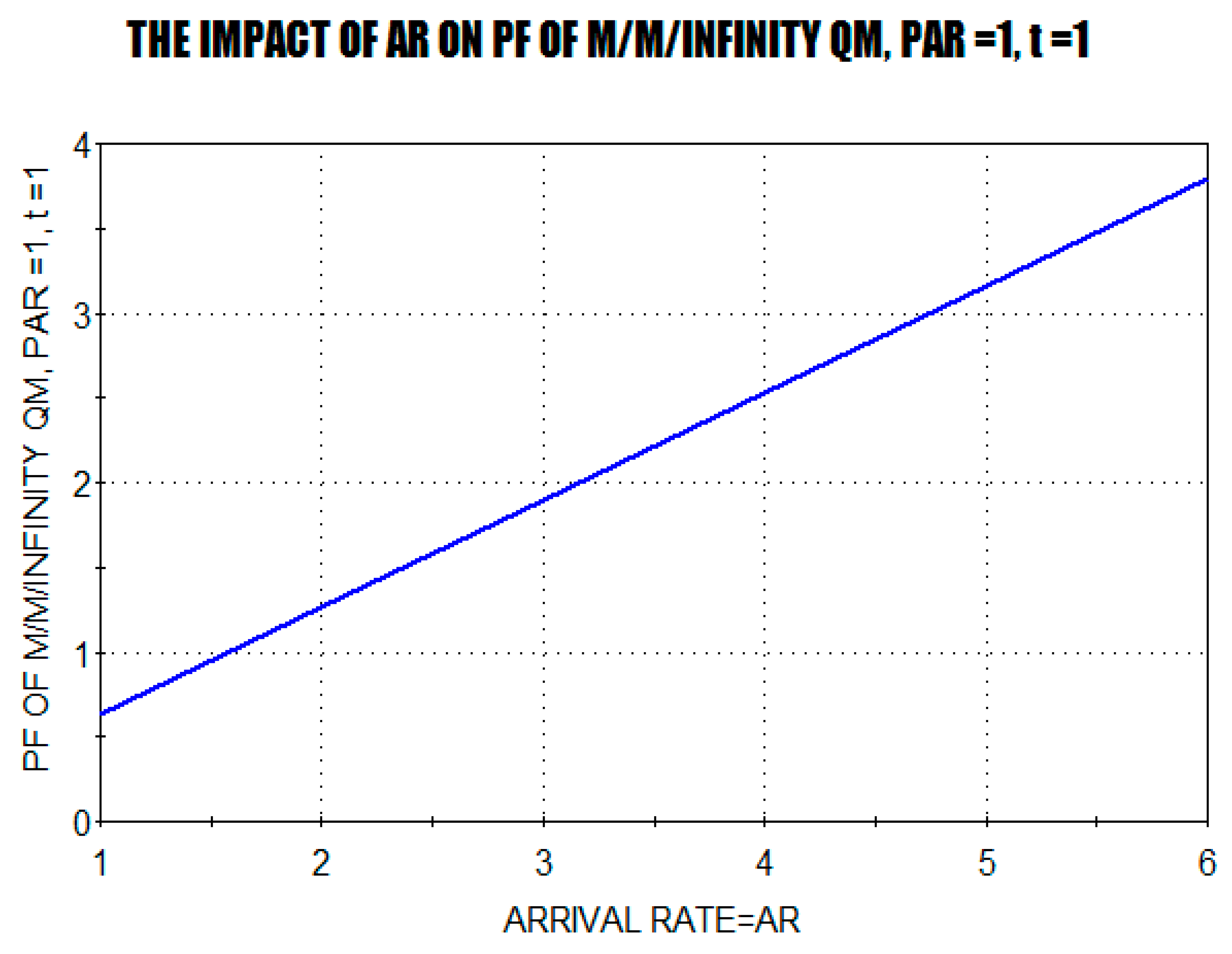
Figure 6 provides an evidence of the forever decreasability phase of the PF in the Poisson Arrival Rate, which agrees with the analytic findings of TTPF.
As observed from Figure 7, the potential function, PF is forever increasing in time, which agrees with the analytic results.
8. Some Algebraic Properties of the Potential Function, (c.f., (3.23))
Theorem 8.1.
The three-dimensional potential function (c.f., (3.23)) is generally not well-defined.
Proof.
Let , be such that Let
directly implies:
So, (8.2) holds if and only if:
Clearly (8.3) is satisfied if and only if:
It can be verified that (8.4) will generate the following sets of equations:
yields (which implies is a contradiction. Moreover, the other possibility is to allow the
The reader can check that after some manipulation,
Based on the analytic results, we can have will hold. This means that is not well-defined.
Several emerging important special cases of Theorem 8.1 are obtained in the following theorems.
Theorem 8.2.
For constant values of , the three-dimensional potential function (c.f., (3.23)) satisfies the following:
(1) is well-defined.
(2) onto
(3)
(4) given by
Proof.
(1) For constant values of be such that Thus, implies:
Hence, it follows that
This proves (1).
(2) For every arbitrary , for constant values of there exist a unique triple such that the that the representation exists. Therefore, onto.
(3) It suffices to show that for constant values of , it holds that:
follows by (1).
. The proof is immediate.
Combining (2) and (3), is bijective with a unique inverse, namely . To obtain let
Following (8.14), we get
Theorem 8.3.
For constant , the potential function c.f., (3.23)) satisfies the following:
is well-defined.
onto
(4)
given by
Proof.
Following a similar approach as in Theorem 8.2, the proofs are straightforward.
Theorem 8.4.
For constant , the potential function c.f., (3.23)) satisfies the following:
is well-defined.
onto.
(4)
given by
Proof.
Following a similar approach as in Theorem 8.2, the proofs are straightforward.
Theorem 8.5.
For constant , the potential function (c.f., (3.23)) satisfies the following:
is well-defined if and only if the temporal values are constant.
onto.
(4)
and they are existing uniquely if and only if the temporal values are constant. In this case,
Such that,
satisfies:
Proof.
(1) Let , be such that Let
directly implies:
For the Necessity, if the temporal values are constant, then holds, which implies by (8.19), that , since
Therefore, is well-defined. For the sufficiency, let be well-defined, then it is never permissible that:
and hold. Assume that there is some such that to imply . Then, we get a contradiction to the hypothesis of well-defindness of =. Therefore, the temporal values should be constant. This completes the proof of (1).
The proof of (2) is straightforward.
It suffices to show that for constant values of ,
Following the proof of (1), the necessity condition holds if the temporal values are constant. Furthermore, the sufficiency condition implies that , which holds if and only if Repeating implies the same procedure iteratively would imply This provides an evidence that all the temporal values are constant.
The first part of the proof of (4) is clear. Now, assume that all the temporal values are constant. Then, of course, there should be a uniquely defined and determined inverse, namely, = z, then it holds that
Therefore, the inverse potential function, is devised by:
Theorem 8.6.
For constant , the potential function (c.f., (3.23)) satisfies the following:
is well-defined if and only if the temporal values are constant.
onto
.
(4)
and it is existing uniquely if and only if the temporal values are constant. In this case,
Proof.
Following the same technique as in Theorem 8.5, the proofs can be easily done.
The following section provides the Threshold Theorems of the derived inverse of the potential functions (c.f.,(8.9), (8.15),(8.16),(8.23)).
9. The Threshold Theorems of the Derived Inverses of Poten-Tial Function, IPFs
Theorem 9.1.
(c.f., (8.9)), we have
i)
is forever increasing in
if and only if:
ii) is never decreasing in (9.2)
Proof.
i) We have
is forever increasing if and if . Following (9.3), this holds if and only if . Surely, it is implied that i) holds. Engaging the same approach, if and only if , but this implies , which violates the continuity of
Theorem 9.2.
(c.f., (8.15)), we have
i)
is forever increasing in
ii)
is never decreasing in
Proof.
i) We have
is forever increasing if and if . By (9.4), this is satisfied generally since is always positive.
The proof of ii) follows since is never negative.
Theorem 9.3.
(c.f., (8.16)), we have
i)
is never increasing in
ii)
is forever decreasing in
Proof.
i) We have
is forever increasing if and if . Following (9.5), this never holds since are always positive. This proves i).
The proof of ii) is immediate.
Theorem 9.4.
(c.f., (8.23)), we have
i)
is never increasing in
ii)
is never decreasing in
iii)
is forever increasing in
if and only if
iv)
is forever decreasing in
if and only if
Proof.
i) We have
is forever increasing in .This proves i).
The proof of ii) is immediate.
is forever increasing in if and only if:
(9.10) could be re-written in the form:
Hence, iii) is done.
As for iv) is forever decreasing in if and only if
(9.11) could be re-written in the form:
10. Numerical Experiments on the Threshold Theorems of the Derived Inverses of Potential Function
10.1. Numerical Experiment on Theorem 9.1
We have, the inverse of the potential function, IPF = (c.f., (8.9)). Let the arrival rate, AR= . If ,or equivalently, , then .
As we can see from Figure 8 that the inverse of potential function, IPF is forever increasing for all the temporal values less than the threshold =, where both are constants. These experimental results agree with the analytic findings of Theorem 9.1
12.2. Numerical Experiment on Theorem 9.2
We have, the inverse of the potential function, IPF = (c.f., (8.15)). .
Figure 9 shows that the inverse of potential function, IPF is forever increasing with respect to the arrival rate, for infinite time and constant Poissonian arrival rate. This agrees with the analytic results of Theorem 10.2.
10.3. Numerical Experiment on Theorem 9.3
We have, the inverse of the potential function, IPF = (c.f., (8.16)). .
Figure 10 shows that IPF is forever decreasing in PAR = Poissonian arrival rate, for constant arrival rate and infinite time. This agrees with the analytic findings of theorem 10.3. It is also clear that ,
10.4. Numerical Experiment on Theorem 9.4
We have, the inverse of the potential function, IPF = (c.f., (8.23)). .
Part One: Let
As observed from Figure 11, is forever increasing in This shows that both analytic and numerical results match .
Part Two:
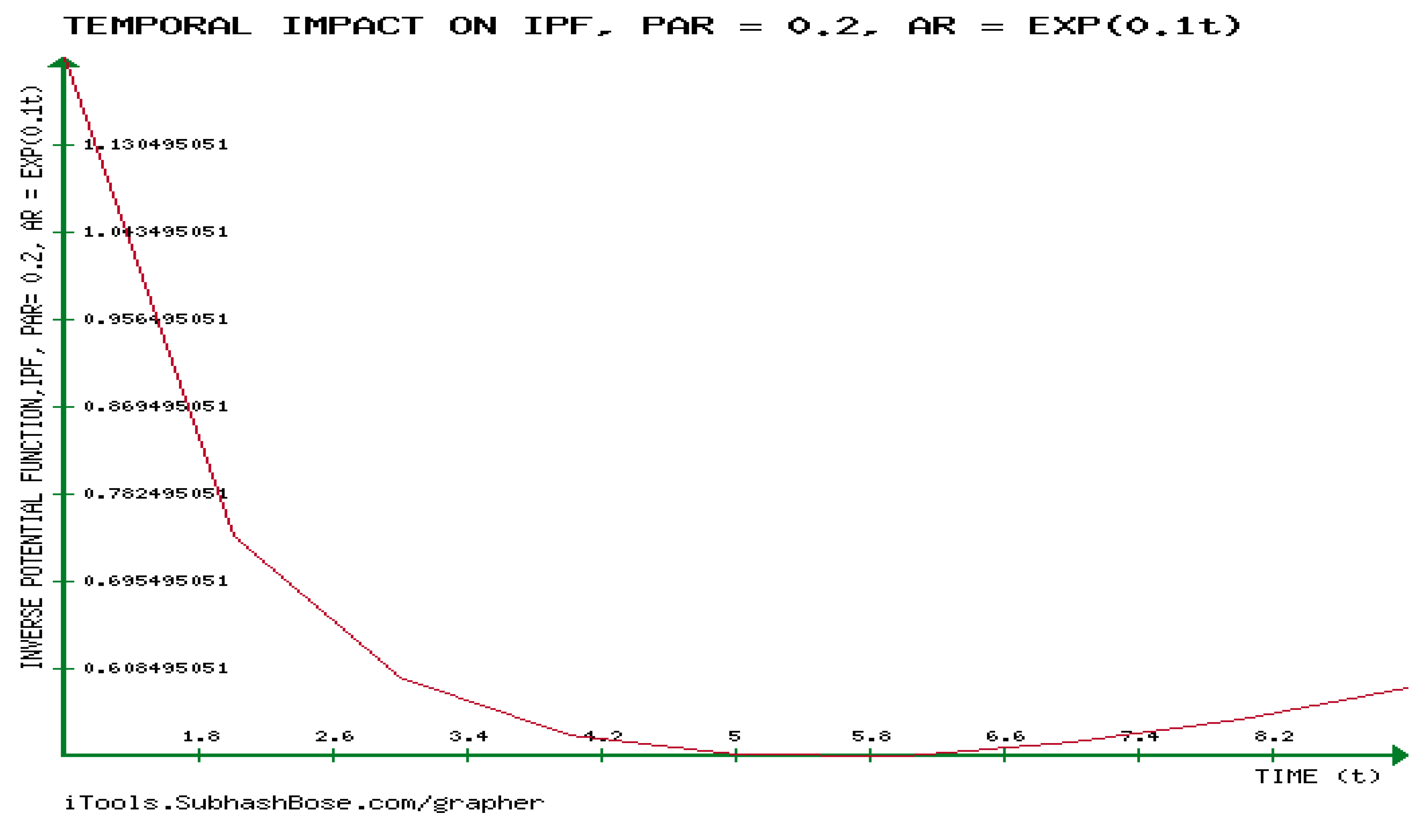
, we have the threshold to be:
As observed from Figure 12, is forever decreasing whenever time is less than the threshold and it starts to increase when time is greater than the threshold.
11. The Gaussian Curvature, of (2.14) as Time Approaches Infinity
Theorem 11.1.
The Gaussian Curvature, as time approaches infinity is devised by:
Proof.
We have
where
Therefore,
As
We have
Recall that:
Combining (11.12), (3.14)-(3.16), we have
, the Gaussian Curvature, as time approaches infinity is devised by:
In the following theorem, the zeros of the Gaussian Curvature are determined. Based on this, the paths of motion of the coordinates at which the underlying QM is looked at as a developable surface are obtained. The following theorem presents a novel approach which unifies Information Geometry with Riemannian Geometry, the theory of developable surfaces and the theory of time -dependent queueing systems.
Theorem 11.2.
The M/M/QM is developable on the following trajectories: , or or or or or or
Proof.
(11.25) has the closed form solution:
If and only if one of the following equations holds:
It is clear that and are two closed form solutions of (11.26). We can try another closed form solutions of (11.27), for example, for any arbitrary non-zero real constant . This implies:
for some arbitrary non-zero real constant. Therefore, we have the closed form solutions of (11.27) to be given by
Moreover, we can deduce more closed form solutions of (11.27), for example, for any arbitrary non-zero real constant. This implies :
for some arbitrary non-zero real constant. Therefore, we have the closed form solutions of (11.27) to be given by
12. Ricci Curvature TENSOR , and the Gaussian Curvatures of M/M/∞ QM F M/M/
QM as Time Approaches Infinity
In this section, the Ricci Curvature Tensor, (RCT) of M/M/ is obtained. These calculations are needed in the following sections.
Which is a nine-dimensional tensor.
12.1. The First Component,
Theorem 12.1.
for the underlying M/M/ QM, the first component of the Ricci Curvature Tensor as time reaches infinity,
Proof.
Recalling from (11.4)-(11.10), that
We have
We have
where , i,j,k,s = 1,2,...,n
Hence,
Therefore,
Based on the above complicated calculations, we have
Recall that whenever Ricci curvature is positive, then according to the Bonnet Myers theorem (c.f., Ollivier, 2010) the Riemannian manifold is more positively curved than a sphere and the diameter of the manifold is smaller.
Based on this, we are going to open a new thinking framework which designs a decision procedure on when the underlying QM is more positively curved than a sphere and the diameter of the manifold is smaller. This could be obtained by calculating the zeros of the first component of the Ricci Curvature tensor as time approaches infinity,, namely, . In other words, the following theorem answers this open question.
Theorem 12.2.
is one of the following:
1)
2)
3)
4)
5)
6)
Proof.
This proves 6).
We have
Clearly, = 0 if and only if one of the following statements holds:
It has been proven that the exact solution of differential equation (11.25) is determined by
This proves 2).
The proofs of 3) and 4) are straightforward.
Following
Let . This reduces (11.28) to
which implies or
(equivalently, = ). These yields , which has a closed form solution:
This proves 5).
Moreover, plugging yields
It can be easily seen that (11.31) generates or or ++, implying
11.3. , (c.f., (2.13))
The remaining 72 can be obtained by following the same procedure.
13. Conclusion and Future Work
The research done for this paper offers a fresh method for modelling the information geometry of a queuing system. From the perspective of IG, the manifold of the temporary queue is described in this context.
FIM and IFIM of transient M/M/ queue manifold is devised. In addition to that, new results that uncovered the significant impact of stability of M/M/ queue manifold on the existence of (IFIM) are devised. Moreover, the Geodesic equations of motion of the coordinates of the underlying transient are obtained. Also, it is revealed that stable QM is developable (i.e., has a zero Gaussian curvature) and has a non-zero Ricci Curvature Tensor (RCT). Novel stability dynamics of transient M/M/ queue manifold is revealed by discovering the mutual dual impact between the behaviour of (RCT) and the stability and the instability phases of the underlying queue manifold. Furthermore, a new discovery that presents the significant impact of stability of queue manifold and the continuity of the unique representation between M/G/1 queue manifold and Ricci Curvature Tensor (RCT). The information matrix exponential (IME) is devised. Also, it is shown that stability of the devised (IME) enforces the instability of queue manifold. Unifying IG with Queueing Theory enables the study of dynamics of transient queueing systems from a novel Riemannian Geometric (RG) point of view, leading to the analysis of the transient queue, based on the Theory of Relativity (TR). Full analytic study of the obtained potential function together is provided. Additionally, provision of a novel link between Ricci Curvature (RCT) and the stability analysis of the transient QM combined with a full investigation of the newly introduced QT-IG unifiers together with the impact of stability/ instability of the underlying transient on them. More interestingly, full investigation of the newly introduced (QIGU) unifiers together with the impact of stability/ instability of the underlying transient QM on them is given. There are several avenues of future work. To start with, we are going to extend this novel approach to many existing transient queueing systems. Also, another interesting path is to investigate the Information geometric analysis of the overall dynamic of time dependent distributions in Physics and Quantum Mechanics.
References
- I. A. Mageed, et al, "Towards a Revolutionary Info-Geometric Control Theory with Potential Applications of Fokker Planck Kolmogorov(FPK) Equation to System Control, Modelling and Simulation," 2023 28th International Conference on Automation and Computing (ICAC), Birmingham, United Kingdom, 2023, pp. 1-6,. [CrossRef]
- Mageed, I. A., & Kouvatsos, D. D. (2021, February). The Impact of Information Geometry on the Analysis of the Stable M/G/1 Queue Manifold. In ICORES (pp. 153-160).
- Nielsen, F., 2020, An Elementary Intrduction to Information Geometry, Sony Computer Science Laboratories Inc, Japan, MDPI Journal.
- Mageed, I. A., & Zhang, Q. (2022, October). An Information Theoretic Unified Global Theory For a Stable M/G/1 Queue With Potential Maximum Entropy Applications to Energy Works. In 2022 IEEE Global Energy Conference (GEC) (pp. 300-305).
- Nakagawa, K., 2002, The geometry of M/D/1 queues on Large Deviation, International Transactions of Operational Research, Volume 9, Issue 2.
- Norton, J.D., 2020, Non-Euclidean geometry and curved spaces, department of history and philosophy of science, University of Pittsburgh, available online at.
- https://www.pitt.edu/~jdnorton/teaching/HPS_0410/chapters/non_Euclid_curved/index.htm.
- Mageed, I. A, et al. (2023). Towards a Revolutionary Info-Geometric Control Theory with Potential Applications of Fokker Planck Kolmogorov (FPK) Equation to System Control, Modelling and Simulation. In 2023 28th IEEE International Conference on Automation and Computing (ICAC) pp. 1-6.
- Dodson, C.T.J., 2005, Topics in Information Geometry, University of Manchester. Available online on.
- http://eprints.maths.manchester.ac.uk/131/1/InfoGeom.pdf.
- Regli, JB., Silva, R, 2018, Alpha-Beta Divergence For Variational Inference - arXiv preprint arXiv:1805.01045, - arxiv.org. Available online at [1805.01045] Alpha-Beta Divergence For Variational Inference (arxiv.org).
- Turner, Richard E and Sahani, Maneesh, 2011, Two problems with variational expectation maximisation for time series models. Bayesian Time series models, pp. 115–137.
- Amari, S.,2012, Differential-geometrical methods in statistics, volume 27. Springer Science & Business Media.
- Minka, T., 2005, Divergence measures and message passing. Technical report, technical report, Microsoft Research.
- Hern´andez-Lobato, Jos´e Miguel, Li, Yingzhen, Rowland, Mark, Hern´andez-Lobato, Daniel, Bui, Thang, D., and Turner, Richard E, 2016, Black-box αdivergence minimization.
- Rényi, A., et al., 1961 On measures of entropy and information. In Proceedings of the Fourth Berkeley Symposium on Mathematical Statistics and Probability, Volume 1: Contributions to the Theory of Statistics. The Regents of the University of California.
- Ghosh, Abhik, Harris, Ian R, Maji, Avijit, Basu, Ayanendranath, Pardo, Leandro, et al., 2017, A generalized divergence for statistical inference. Bernoulli, 23 (4A):2746–2783.
- Basu, Ayanendranath, Harris, Ian R, Hjort, Nils L, and Jones, MC. , 1998, Robust and efficient estimation by minimising a density power divergence. Biometrika, 85(3):549–559.
- Ghosh, Abhik and Basu, Ayanendranath, 2016, Robust bayes estimation using the density power divergence. Annals of the Institute of Statistical Mathematics, 68 (2):413–437.
- Cichocki, Andrzej, Cruces, Sergio, and Amari,S., 2011, Generalized alpha-beta divergences and their application to robust nonnegative matrix factorization. Entropy, 13(1):134–170.
- Cilingir, K., Manzelli, R., Kulis,B., 2020, Deep Divergence Learning. Online available at: arXiv:2005.02612v1.
- Cai, L., Chen, Y., Cai, N., Cheng, W., 2020, Utilizing Amari-Alpha divergence to stabilize the training of generative adversarial networks, Entropy.
- Chernoff, H, A measure of Asymptotic efficiency for tests of a hypothesis based on the sum of observations. Ann. Math. Statist.1952,23, 493–507.
- Lecture Notes, October 2005: Information Theory and Statistics. Berkeley [Online]. Available on https://www.stat.berkeley.edu/~binyu/summer08/L1P1.pdf.
- Malham, S.J.A.,August 23, 2016,An introduction to Lagrangian and Hamiltonian mechanics.[Online] Available on file:///E:/BALKING%20BREAKTHROUGHS/Paper%20Eight/attachments/mechanics.pdf.
- Mageed, I. A, and Kouvatsos, D. (2021). The Impact of Information Geometry on the Analysis of the Stable M/G/1 Queue Manifold. In Proceedings of the 10th International Conference on Operations Research and Enterprise Systems - Volume 1: ICORES, ISBN 978-989-758-485-5, pages 153-160.
- Mageed, I. A., Kouvatsos, D.D., 2019, Information Geometric Structure of Stable M/G/1 Queue Manifold and its Matrix Exponential, Proceedings of the 35th UK Performance Engineering Workshop, School of Computing, University of Leeds, Edited by Karim Djemame, 16th of Dec.2019, p.123-135. [Online] at:.
- https://sites.google.com/view/ukpew2019/home.
- Loveridge, L.C., 7 September 2016, Physical and Geometric interpretations of the Riemannian Tensor, Ricci Tensor and.
- Scalar Curvature, [Online] Available on https://arxiv.org/pdf/gr-qc/0401099.pdf.
- Shaw, S., 2015, Sequences, Series and Taylor Approximation. Available online on:.
- http://www.brunel.ac.uk/~icsrsss/teaching/ma2730/lec/ma2730.pdf.
- Rudelius, T., 2012, A Geometric Understanding of Ricci Curvature in the context of Pseudo-Riemannian Manifold, Bachelor of Arts, Cornell University.
- Ollivier,Y., 201, A visual interpretation to Riemannian Curvatures and Some Discrete Generalizations. [Online].
- www.yann-ollivier.org/rech/publs/visualcurvature.pdf.
- Thomas, R., 2015, Kissing the curve – manifolds in many dimensions, online at:.
- https://plus.maths.org/content/kissing-curve-manifolds-many-dimensions.
- Snezana, L., 2011, Developable Surfaces: Their History and Application, Nexus Network Journal Vol. 13, No. 3.
- Weisstein, Eric W., 2021, Well-Defined, From MathWorld- A A Wolfram Web Resource. Available Online at:.
- https://mathworld.wolfram.com/Well-Defined.html.
- Sankaranarayanan, S., 2014, lecture 18, One-to-One and Onto functions, an online source.https://home.cs.colorado.edu/~srirams/courses/csci2824-spr14/functionTypes-17.html.
- Smith,J.T.,2013, Cubic and Quartic Formulas, San Francisco State University. [Online] Available on.
- http://Cubic&Quartic.pdf.
- Horan, R., Lavelle, M., 2005, Maxima and Minima. Available online at:.
- https://www.plymouth.ac.uk/uploads/production/document/path/3/3731/PlymouthUniversity_MathsandStats_maxima.
- Roussel, M., R., April 2019, Stability Analysis for ODEs, Morgan & Claypool Publishers.
- Kozma, L., 2020, Useful inequalities, online source, available at.
- http://www.Lkozma.net/inequalities_cheat_sheet.
- Harrison, P.; Patel, Naresh M. 1992, Performance Modelling of Communication Networks and Computer Architectures. Addison–Wesley. p. 173. Online available at:.
- https://dblp.org/rec/books/daglib/0072384.bib.
- Kumar, B.K, Anantha Lakshmi, S.R., and Anbarasu, S.,2014, Transient and steady-state analysis of queueing systems with catastrophes and impatient customers, Int. J. Mathematics in Operational Research, Vol. 6, No. 5.
- Conolly, B.W. and Langaris, C. 1993, On a new formula for the transient state probabilities for M/M/1 queues and computational implications, J. Appl. Prob., Vol. 30, No. 1, pp.237–246.
- MIT Open Course Ware,208. Online available at:.
- https://ocw.mit.edu/courses/mathematics/18-02sc-multivariable-calculus-fall-2010/4.-triple-integrals-and-surface-integrals-in-3-space/part-b-flux-and-the-divergence-theorem/session-84-divergence-theorem/MIT18_02SC_MNotes_v8.1.pdf.
- Kouvatsos, D.D.,1988 A Maximum Entropy Analysis of the G/G/1 Queue at Equilibrium. J. Opl. Res. Soc., 39(2),183- 200.
- Amari, S., 2001, Information Geometry on Hierarchy of Probability Distributions, IEEE Transactions on Information Theory.
- Hamasha, M.M, Elsaadi,E., Hassonah, Y., Magrabi L., and Alamudi, H., ,2016, Analysis of Service Delivery System Using Markov Chain Approach and M/G/1 Queuing Systems, Asian Journal of Industrial Engineering. [Online] Available at:.
- 67518-AJIE-KR (docsdrive.com).
- Rachev, S.T., 1989, The problem of stability in queueing theory. Queueing Syst 4, 287–317 (1989). https://doi.org/8.1007/BF01159470.
- Jefferson,J. 2018, Information Geometry. [Online] available at: https://rojefferson.blog/page/2/.
- Lee, J.M., 1950, Riemannian Manifolds: An Introduction to Curvature, Graduate Texts in Mathematics, 176. Springer-Verlag New York, Inc.
Figure 1.
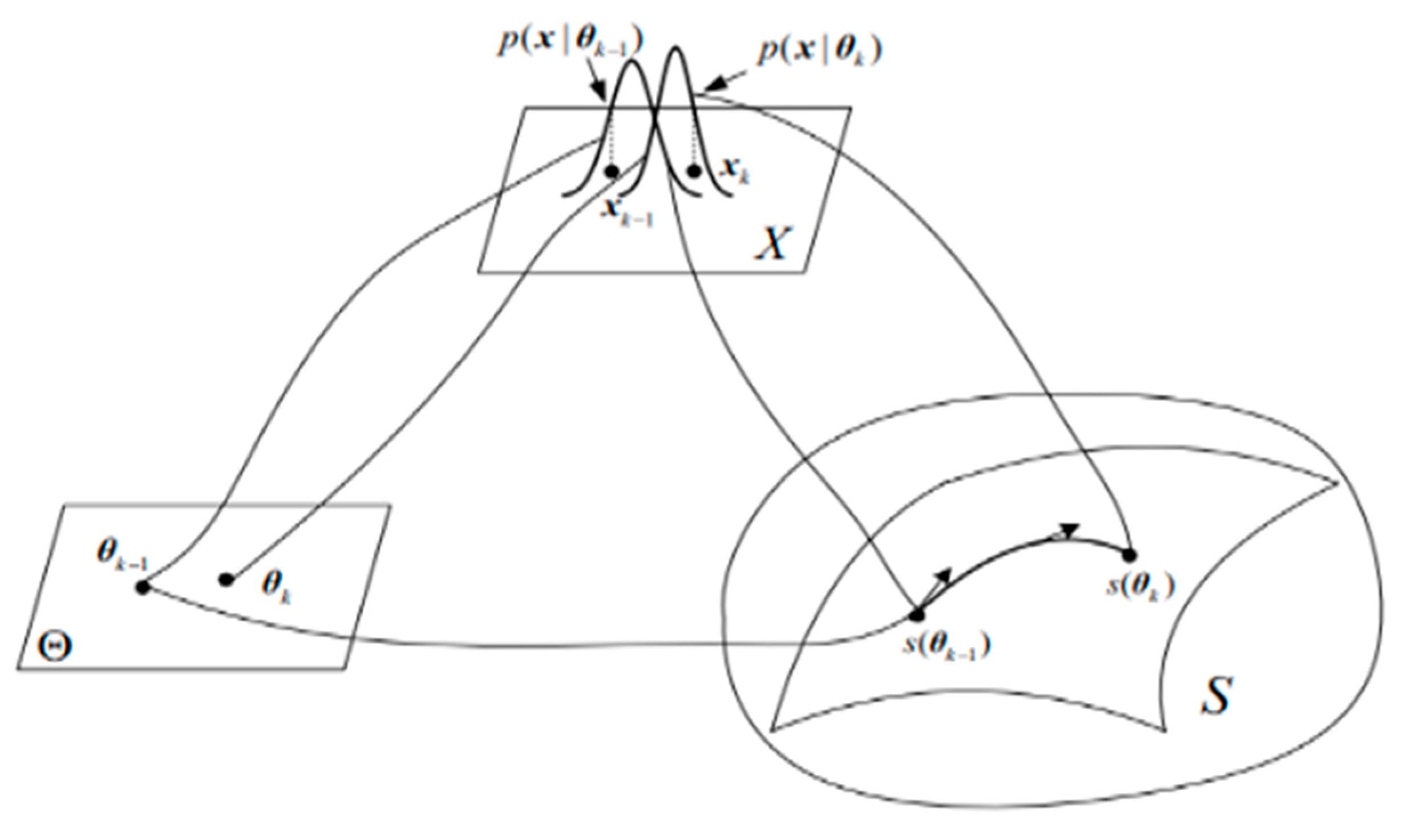
Figure 2.
Geometric representation of geodesics on curved surfaces (c.f., Norton, 2020).
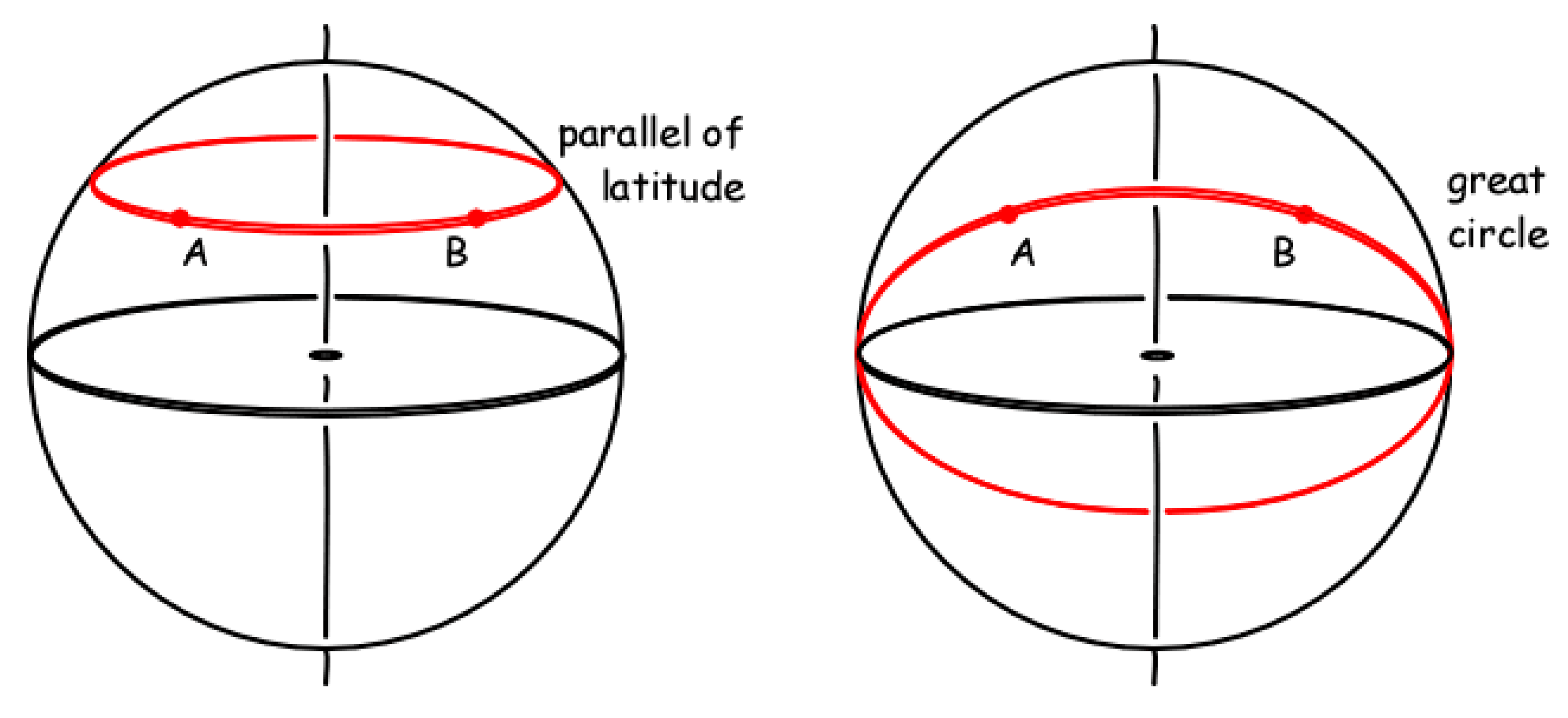
Figure 6.
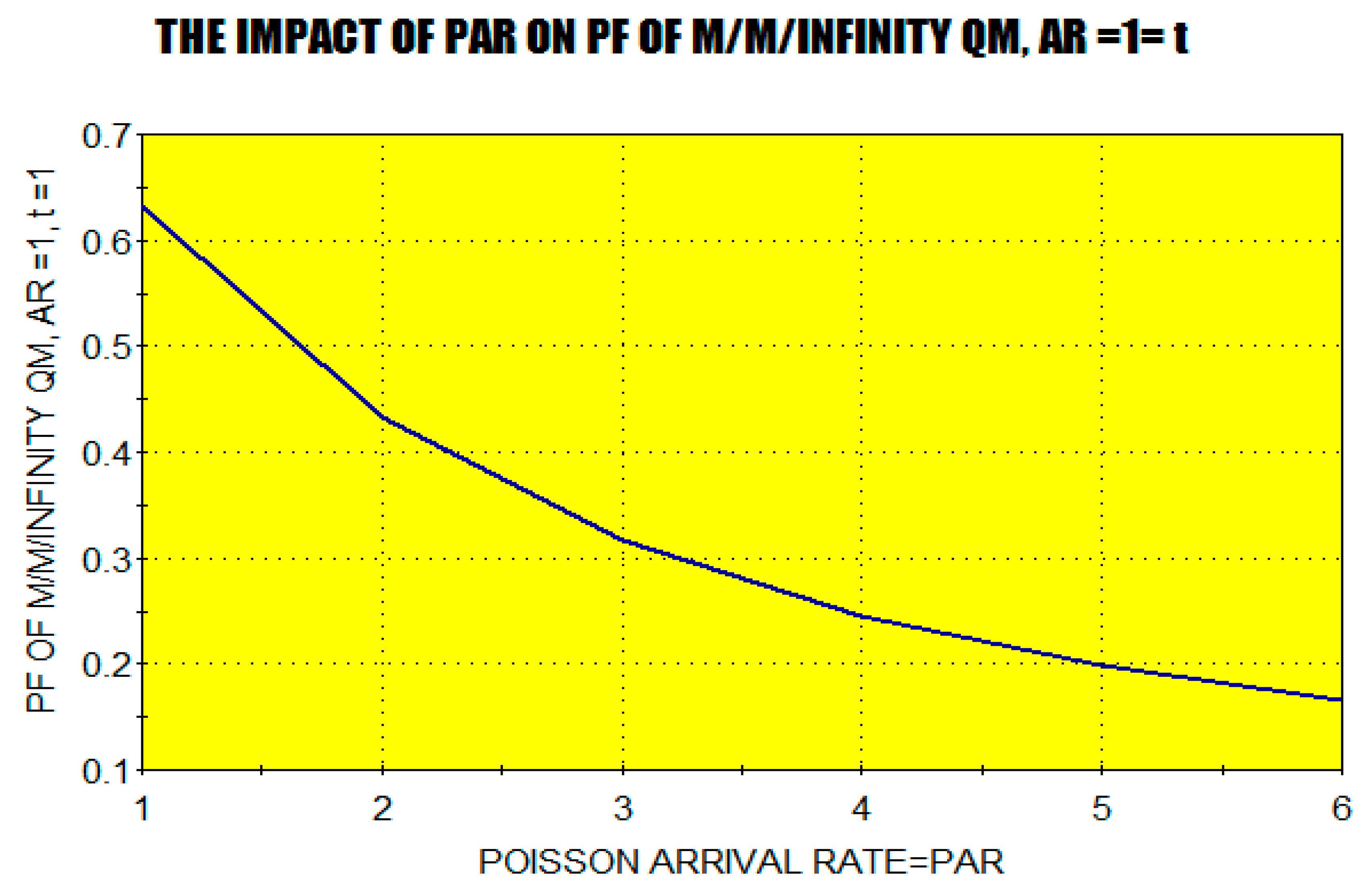
Figure 7.

Figure 8.
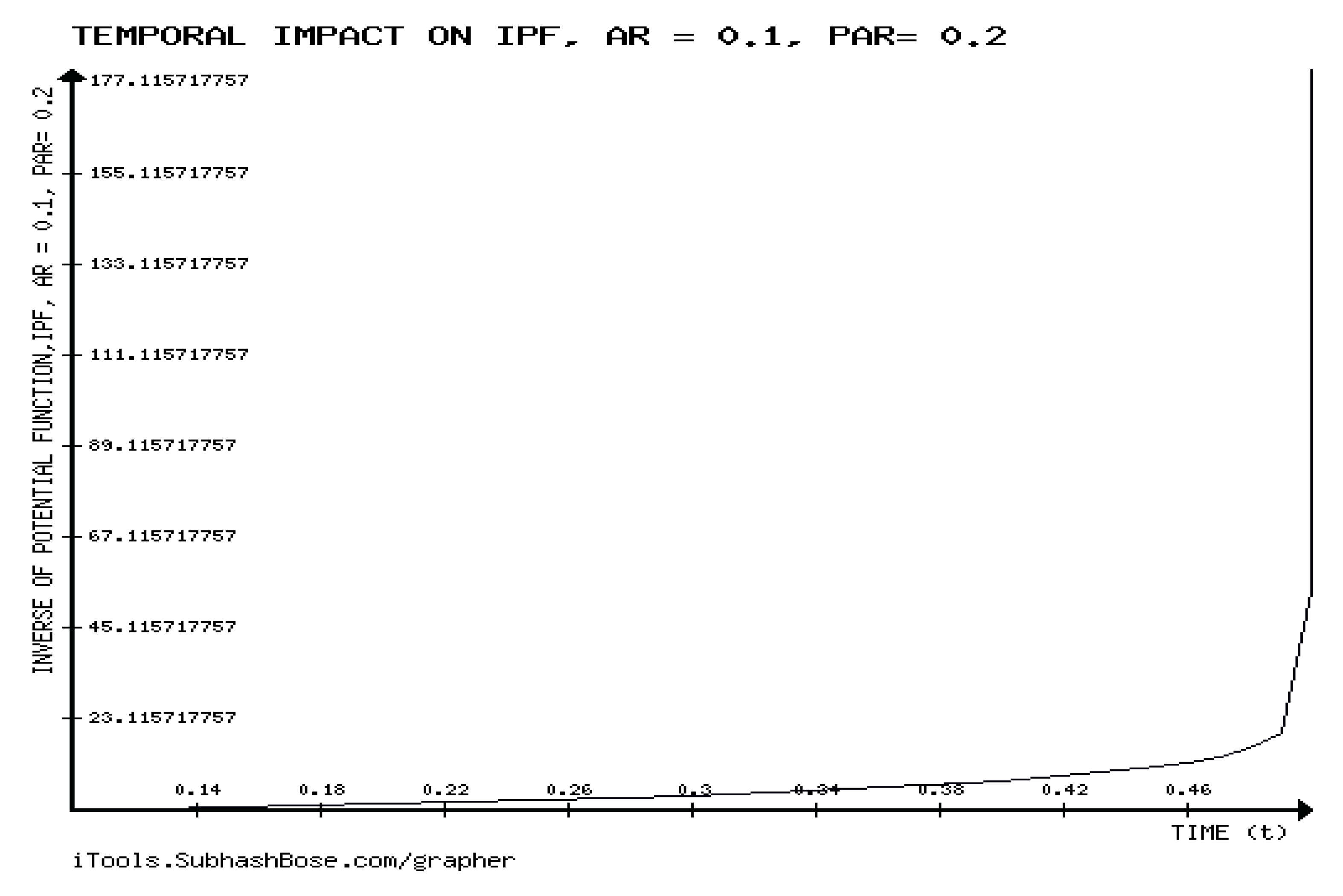
Figure 9.
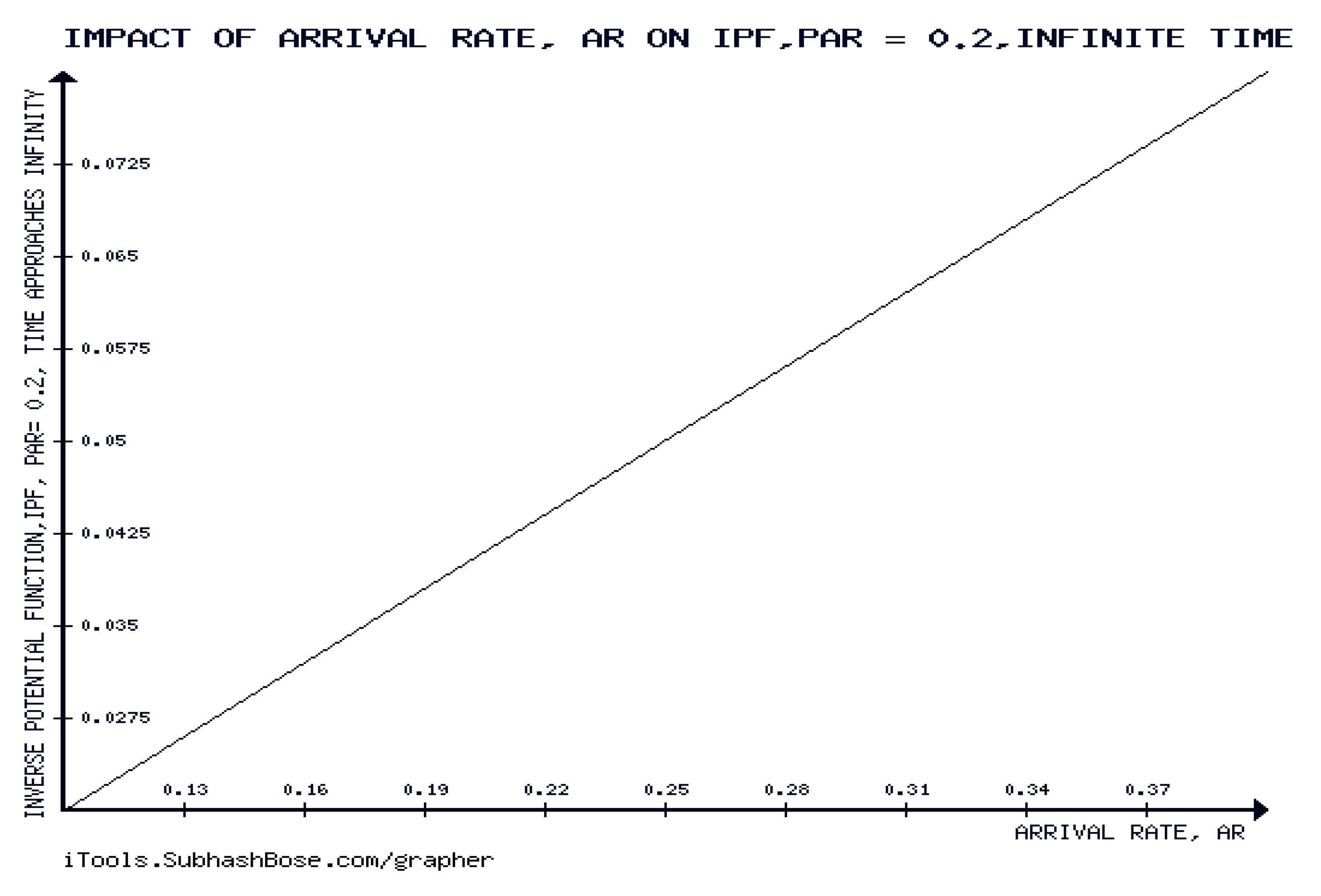
Figure 10.
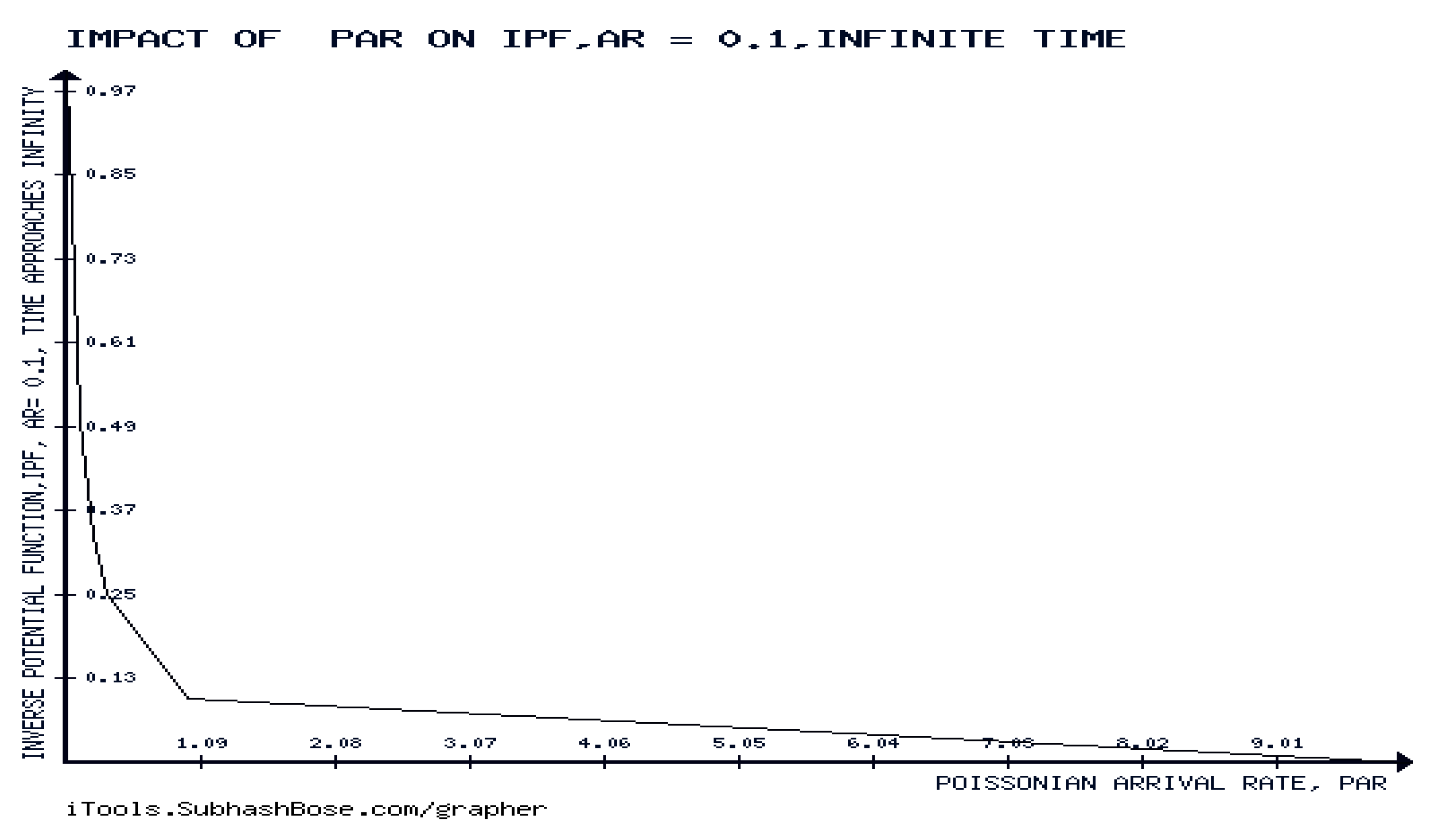
Figure 11.
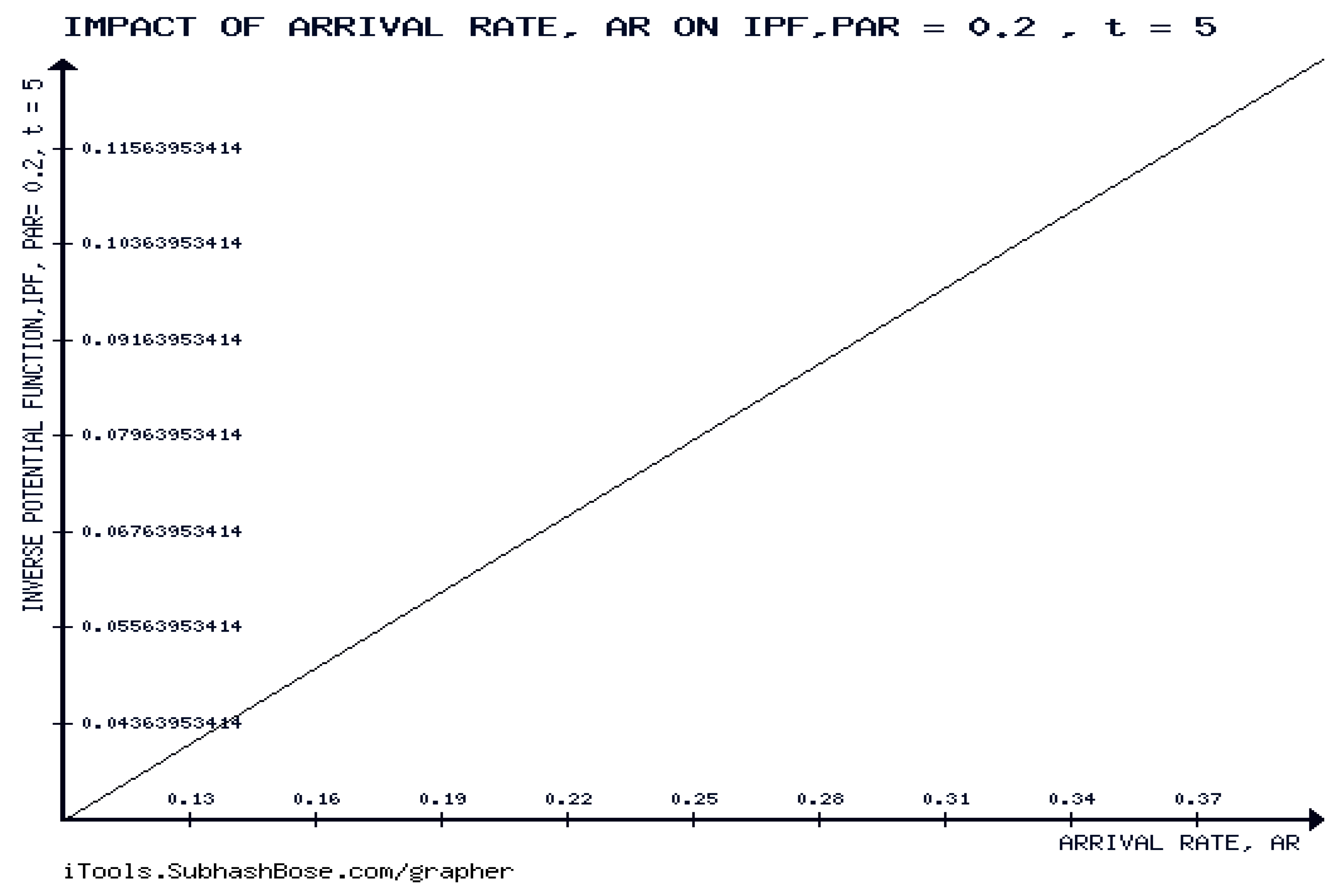
Figure 12.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



