
Submitted:
30 January 2024
Posted:
30 January 2024
You are already at the latest version
Abstract
Information geometry (IG) seeks to characterize the structure of statistical geodesic models from a differential geometric point of view. By considering families of probability distributions as manifolds with coordinate charts determined by the parameters of each individual model, the tools of differential geometry, such as divergences and metric tensors, provide effective means of studying their characteristics. The research undertaken in this paper presents a novel approach to the modelling study of information geometrics of a queueing system. In this context, the manifold of a stable M/G/1queue is characterised from the viewpoint of IG. The Fisher Information matrix (FIM) as well as the inverse of (FIM), (IFIM) of stable M/G/1 queue manifold are devised. In addition to that, new results that uncovered the significant impact of stability of M/G/1 queue manifold on the existence of (IFIM) are obtained. The Kullback’s divergence (KD), and J-divergence (JD).New result has been devised on the significant impact of both server utilization and squared coefficient of variation of the underlying M/G/1 queue manifold on both (KD) and (KD) are devised. Also, it is revealed that stable M/G/1 QM is developable (i.e., has a zero Gaussian curvature) and has a non-zero Ricci Curvature Tensor (RCT). Novel stability dynamics of M/G/1 queue manifold is revealed by discovering the mutual dual impact between the behaviour of (RCT) and the stability and the instability phases of the underlying M/G/1 queue manifold. Furthermore, a new discovery that presents the significant impact of stability of M/G/1 queue manifold and the continuity of the unique representation between M/G/1 queue manifold and Ricci Curvature Tensor (RCT). The information matrix exponential (IME) is devised. It is also shown that the obtained (IME) is unstable. Also, it is shown that stability of the devised (IME) enforces the instability of M/G/1 queue manifold. Unifying IG with Queueing Theory enables the study of dynamics of queueing system from a novel Riemannian Geometric (RG) point of view, leading to the analysis of the stable M/G/1 queue, based on the Theory of Relativity (TR).Extending the study over two new additional divergence measures, namely and together with a complete illustrative numerical results for all these measures including KD, JD. This links Queueing theory, IG with deep machine learning and metric learning. Furthermore, this reveals the revolutionary approach of queue learning. Full analytic study of Gaussian curvatures subject to both Angular and Monge techniques together with the overall stability dynamics impact on these curvatures. Full analytic study of Einestein Tensor and Stress Energy Tensor together with the overall stability dynamics impact on these curvatures. The inclusion of the definitions of Gaussian and Ricci, Ricci scalar curvatures and Einstein Tensor together with their physical interpretations; The proposed novel approach for the pioneer visualization of queueing systems via computational information geometry. The determination of new important links between classical queueing theory and other mathematical disciplines, such as IG, matrix theory Riemannian geometry and the THEORY OF RELATIVITY by providing for first time i) The full detailed derivations of the Gaussian curvature ii) The Ricci curvature tensor and iii) The full physical as well as the geometric interpretation of these new results. The provision of a novel link between Ricci Curvature (RCT) and the stability analysis of the stable M/G/1 QM. The full investigation of the newly introduced QT-IG unifiers together with the impact of stability/ instability of the underlying M/G/1 QM on them. The full investigation of the newly introduced (QIGU) unifiers together with the impact of stability/ instability of the underlying M/G/1 QM on them.
Keywords:
Maximum entropy (ME)
; IG
; SM
; QM
; RCT
; Einstein Tensor
; Stress Energy Tensor
; Riemannian metric (RM)
; probability density function (PDF)
; Fisher Information matrix (FIM)
; Inverse Fisher Information matrix (IFIM)
; threshold theorem
; Kullback’s divergence (KD)
; J-divergence (JD)
; Rényi Divergence(RD)
; sAB Divergence
; QT-IG unifiers
; Queueing Theoretic Fisher Information Unifiers(QIGU)
; information matrix exponential (IME)
; Stability of a matrix
1. Introduction
Information geometry (IG) is a field that applies techniques from differential geometry to statistics [1]. It aims to use geometric metrics to provide a new way to describe the probability density function, serving as a coordinate system in statistical manifolds(SMs). A manifold [2]is a mathematical concept that represents a space with certain properties. In this context, a manifold is a finite-dimensional Cartesian space, denoted as , where refers to a topological space. It is important to note that although figures can be visualized, they are considered abstract geometric figures rather than concrete representations.
In the given context, IG is highlighted as being significantly important[1,3,4]. Figure 1 illustrates how parameter inference, represented by . Additionally, previous research has explored the geometric structures of exponential distribution families.
One mathematical method for solving systems of linear differential equations is the information matrix exponential (IME). It also has significant applications in the theory of Lie groups, which are mathematical structures that have important implications in various areas of mathematics and physics [5]. Interarrival time distribution (IG) of stable M/D/1 queues was studied by using features of queue length pathways, the article introduced a geometric structure to the set of M/D/1 queues, for a more detailed survey, consult [5]. This strategy connected information matrix theories with IG, opening new insights into queueing theory. According to [3,6], Ricci curvature quantifies the distinction between the standard Euclidean metric (EM) and the Riemannian metric (RM) in the setting of the article. In contrast, the difference in volume between a geodesic ball and a Euclidean ball with the same radius is measured by scalar curvature. Figure 2 depicts the knowledge facilitation of comprehension of the geometric characteristics of spaces and how they deviate from Euclidean geometry (c.f., Figure 2).
- [7] states that the exponential of the Fisher Information Matrix (FIM) for the stable M/G/1 queue, a mathematical model used in queueing theory, solves dx/dt . Here, x represents a vector with n dimensions, and A is a nxn matrix. The second extended study by [7] builds upon their previous work [8] and introduces new contributions:
- Finding the underlying QM’s KD and JD measures
- Proving that FIM of the underlying QM solves: dx/dt .
- This current paper is an ultimate extension of both papers, with main deliverables:
- Extending the study over two new additional divergence measures, namely and together with a complete illustrative numerical result for all these measures including KD, JD. This links Queueing theory, IG with deep machine learning and metric learning. Furthermore, this reveals the revolutionary approach of queue learning.
- iv) The solenoidability(incompressibility) of the underlying queueing system is shown. This concept is analogous to the Divergence Theorem[9].
- Full analytic study of Gaussian curvatures subject to both Angular and Monge techniques together with the overall stability dynamics impact on these curvatures.
- The current paper provides a comprehensive analysis of the Einstein Tensor and Stress Energy Tensor, exploring their relationship with stability dynamics and curvatures. It also introduces the definitions and interpretations of Gaussian and Ricci curvatures, as well as the Einstein Tensor.
- Extending the study to include two new divergence measures, Rényi’s and , along with illustrative numerical results such as KD and JD. This extension connects queueing theory, information geometry, deep machine learning, and metric learning, revealing a novel approach called queue learning.
- Additionally, the paper explores the impact of stability dynamics on Gaussian curvatures, provides a comprehensive analysis of Einsteinian and Stress Energy Tensors, and establishes a unified theorem of queueing-theoretic correlations with both special and general relativity.
The road map of this study is: The core definitions for IG are contained in Section 2. In Section 3, FIM and its inverse for the underlying QM are obtained. In Section 4, the α-connection of a stable M/G/1 queue manifold is obtained. In Section 5, the KD and JD [7], Rényi’s, and sAB divergences of a stable M/G/1 QM are computed. In Section 6, methodical arguments are developed demonstrating the developability and non-zero RCT for the underlying queuing manifold system. In addition, a comprehensive examination of the recently announced QT-IG unifiers is presented in Section 6. Section 7 investigates and how the underlying QM’s stability impacts FIM’s stability.
In section 8, Ricci scalar,, the corresponding threshold theorems for the underlying curvatures and the dual queueing impact on the existence of the inverse fisher information matrix(IFIM). Section 9 discusses Queueing theoretic impact on the continuity of new devised queueuing-information geometric unifiers (QIGU). Section 10 is entirely devoted to closing remarks combined with next phase of research.
2. Main Definitions
2.1. Main Definition on IG
Definition 2.1 Statistical Manifold (SM) [7]
and as a PDF. Here, .
Definition 2.2 Potential Function [7]
The potential function denotes () with coordinates only.
Definition 2.3 FIM, namely []
[](c.f., [7]) reads as
Definition 2.4 IFIM, namely [ (c.f., [7])
The arc length is defined to be:
Definition 2.5-Connection(c.f., [7])
The -connection reads as
J-divergence reads as
used in Rényi variational inference VI [12].
[13] reads as:
for such that The authors [13] have presented a novel (dis)similarity measure, namely (c.f., (2.10)). Moreover, it has been illustrated [13] that is potentially robust.
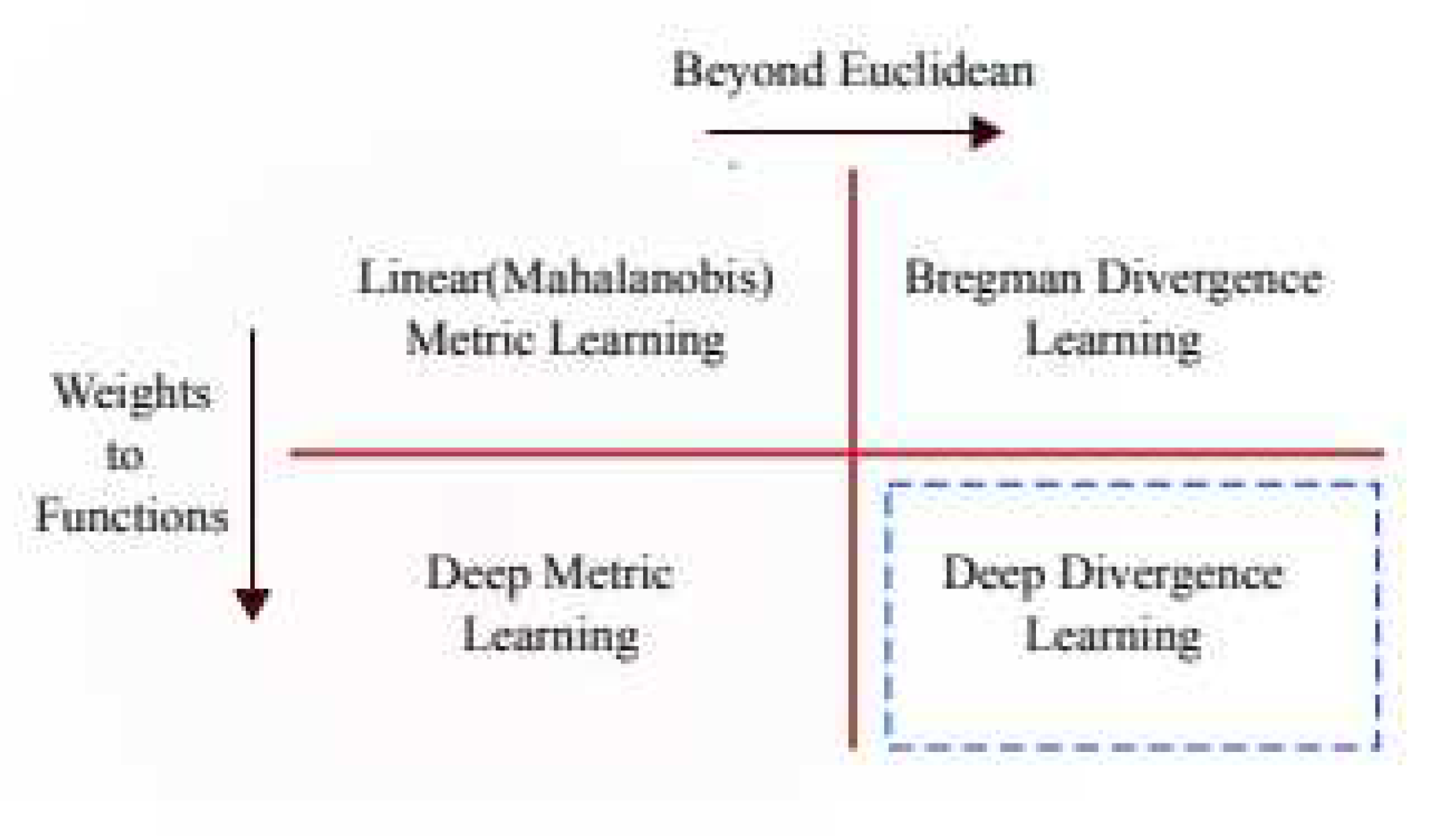
Figure 3.
(c.f., [14]).
Figure 3.
(c.f., [14]).
-
Definition 2.81. TheTensors, [7] readswhere , i,j,k,s = 1,2,...,n2. Thecurvatures (Ricci Tensors) reads [7]3.The reads [7]Potentially,4. One mathematical object that can be obtained by contacting the Riemannian Tensor is the Ricci Tensor [15]. It measures the curvature of space and is employed in the study of Riemannian manifolds. To obtain the Ricci Tensor, the contraction procedure entails summing a few components of the Riemannian Tensor [7].5. An oriented Riemannian manifold’s Ricci curvature tensor (RCT) (c.f., [16]) quantifies the difference between a geodesic ball’s volume on the manifold and its volume in Euclidean space. It gives details on the manifold’s curvature and how it differs from flat space. knowledge the geometry and characteristics of curved spaces in connection to Euclidean geometry requires a knowledge of this topic.6.RCT (c.f., [17]) measures how volumes change over time along geodesic paths on a Riemannian manifold. When the Ricci curvature is positive, it indicates a smaller diameter. This relationship is supported by the Bonnet-Myers theorem, which establishes a connection between the manifold’s positive Ricci curvature and the curvature properties.
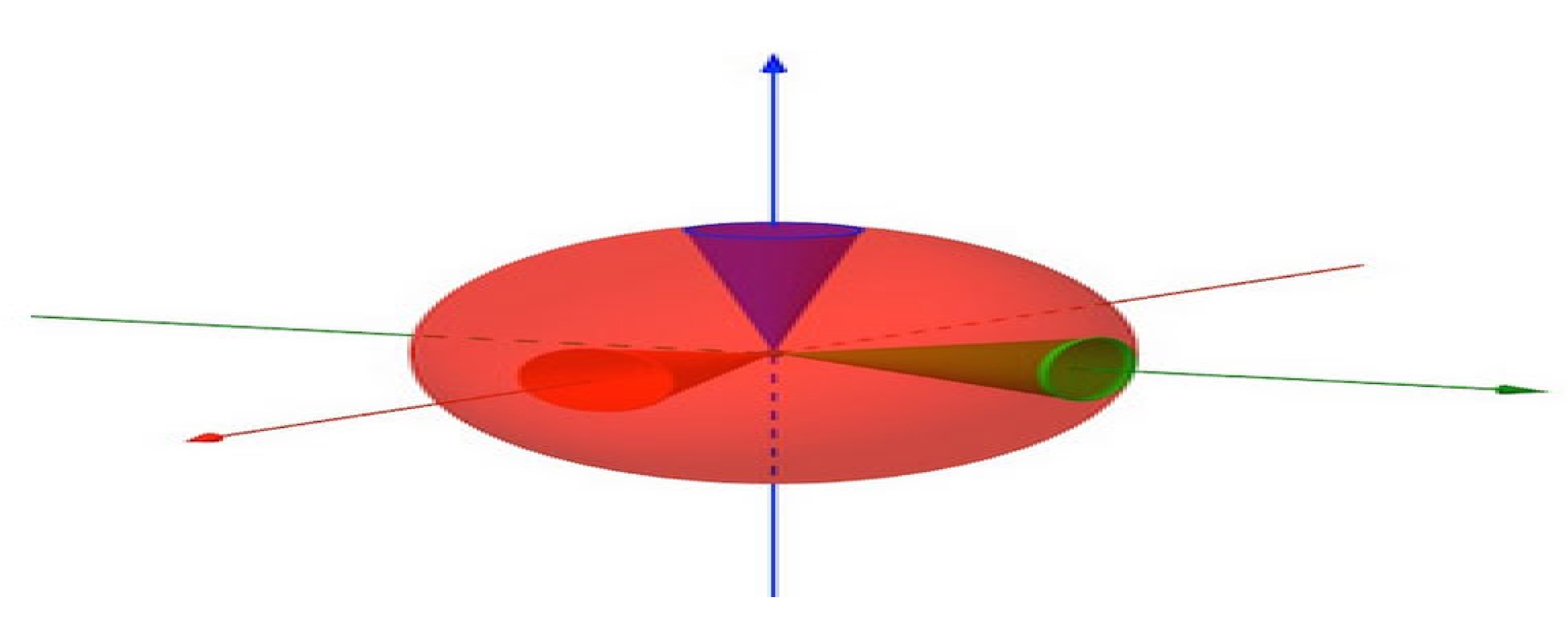
Figure 4.
RCT (c.f., [18]).
Figure 4.
RCT (c.f., [18]).
Definition 2.9
1. Considering the linear system of differential equations
with x is an n-dimensional vector and A is a nxn matrix. It can be shown that (Gunawardena, 2006) the matrix exponential:
is the solution of (2.15).
2. If the characteristic polynomial of A is defined by
such that:
reads as:
where D is the diagonal matrix of eigen values of A, and T is matrix having of the corresponding eigen vectors of A as its columns (c.f., [19]).
Definition 2.10
Developable surfaces are a special kind of ruled surfaces, they have a Gaussian curvature equal to 0, and can be mapped onto the plane surface without distortion of curves: any curve from such a surface drawn onto the flat plane remains the same (c.f., [20]).
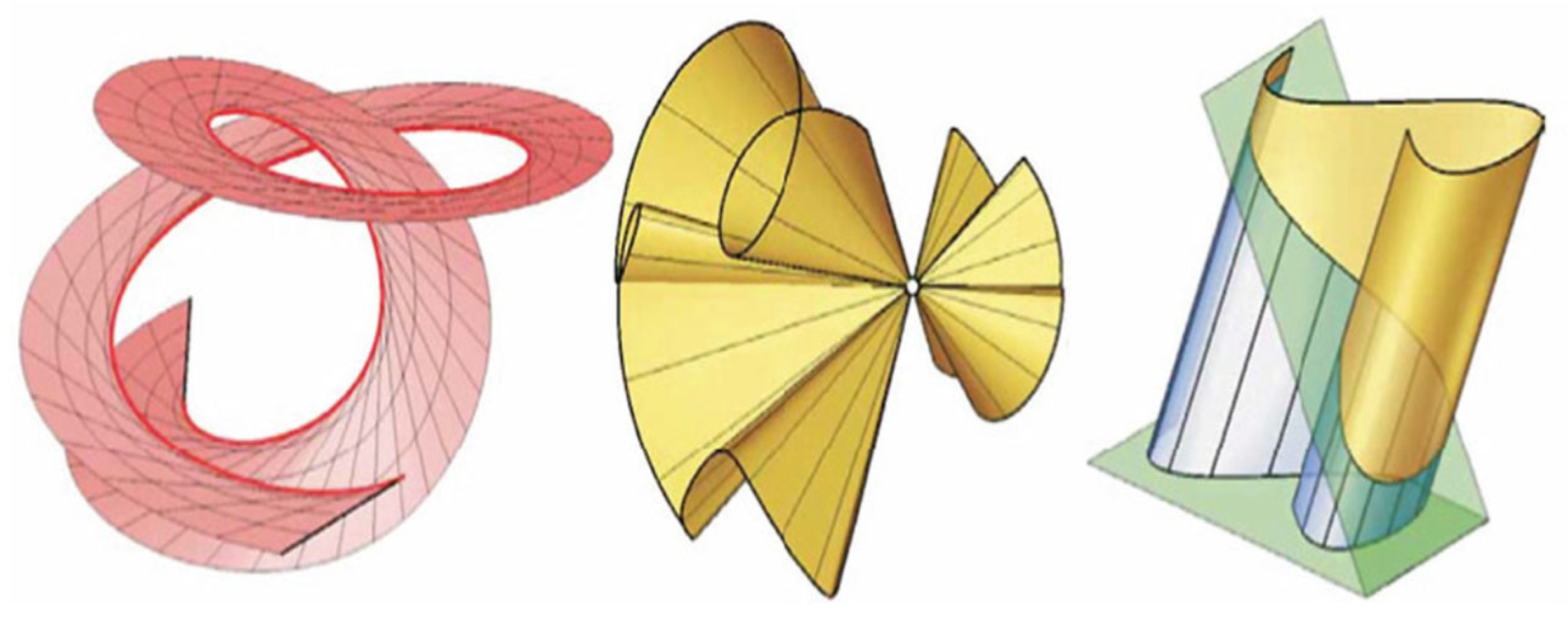
Figure 5.
Three kinds of developable surfaces: Tangential on Figure. 5a (on the left), Conical on Figure 5b (on the centre) and Figure. 5c (on the right), Cylindrical. Note that curves in bold are directrix or base curves and straight lines in bold are directors or generating lines (curves) (c.f., [20]).
Figure 5.
Three kinds of developable surfaces: Tangential on Figure. 5a (on the left), Conical on Figure 5b (on the centre) and Figure. 5c (on the right), Cylindrical. Note that curves in bold are directrix or base curves and straight lines in bold are directors or generating lines (curves) (c.f., [20]).
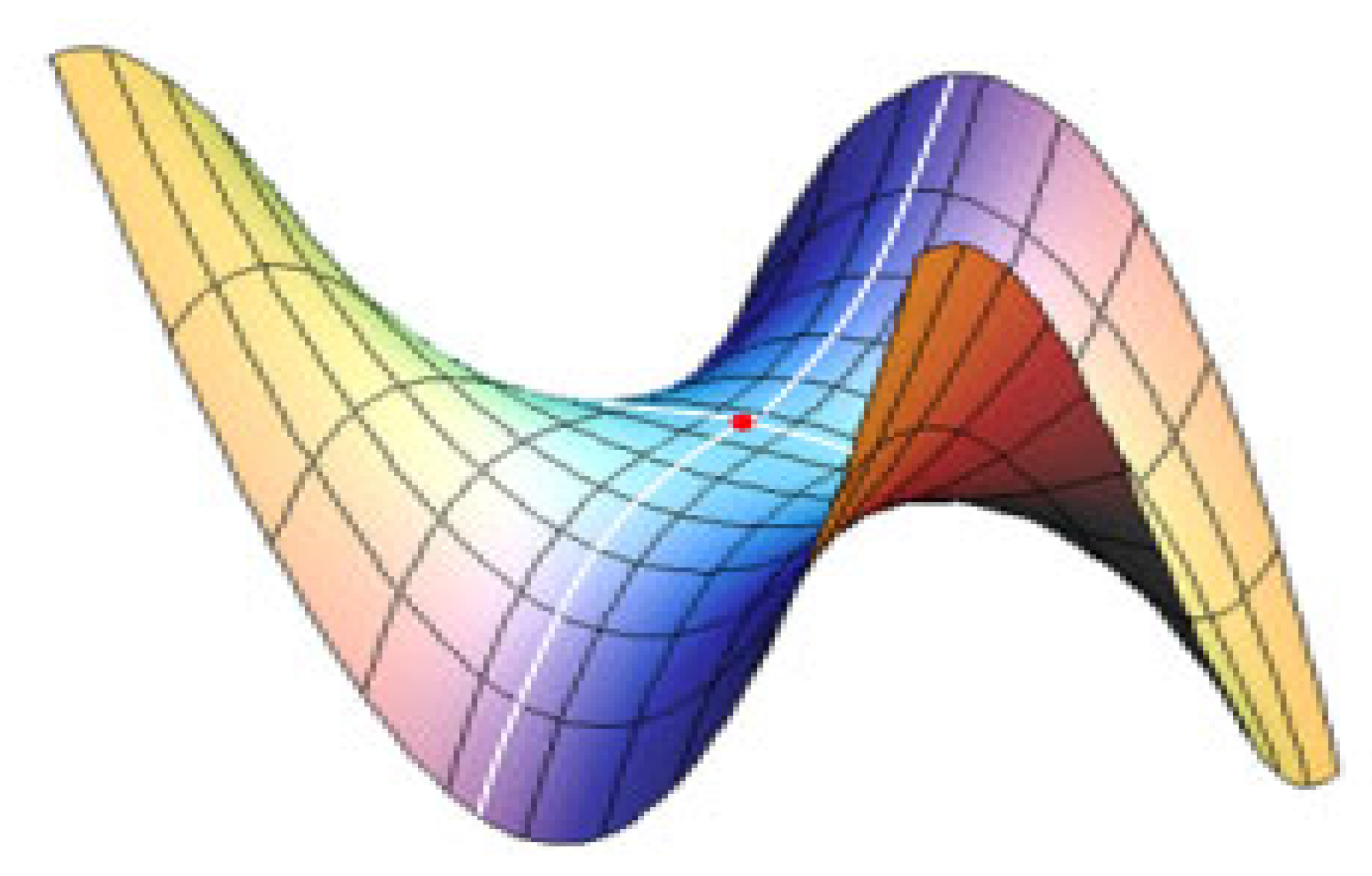
2.2. Gaussian and Mean Curvatures, KGand H respectively (c.f., [21])
Definition 2.11(Mong Patch Technique)
1.Let and be the principal curvatures of a surface patch ( is
and its Mean Curvature is:
2.For a Mong patch and are given by
and its Mean Curvature is
with
Classification of Surface Points
Figure 6.
The elliptic paraboloids (to the right) (c.f., [21]).
Figure 6.
The elliptic paraboloids (to the right) (c.f., [21]).
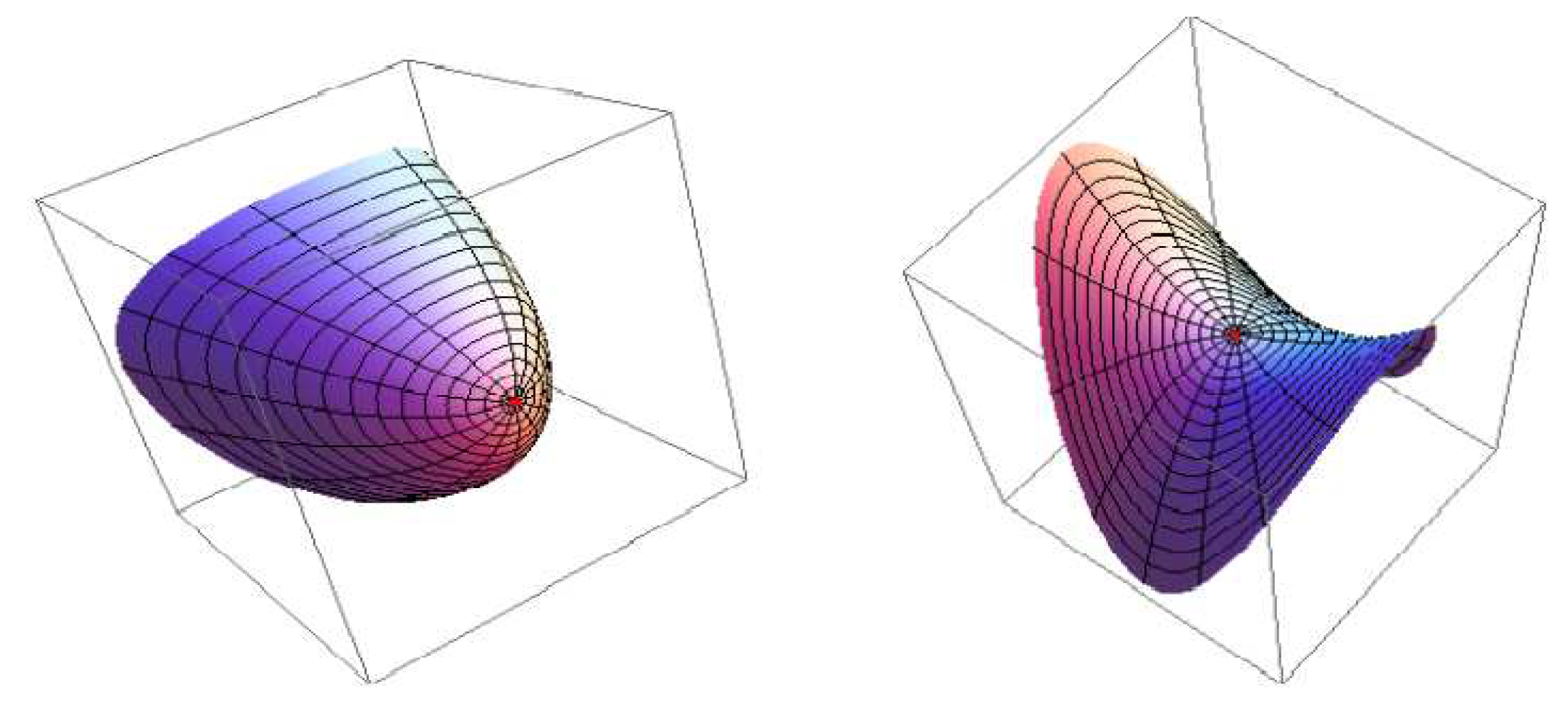
Figure 7.
Planar points with quite different shapes(c.f., [21]).
Figure 7.
Planar points with quite different shapes(c.f., [21]).
A torus as shown in Figure 8
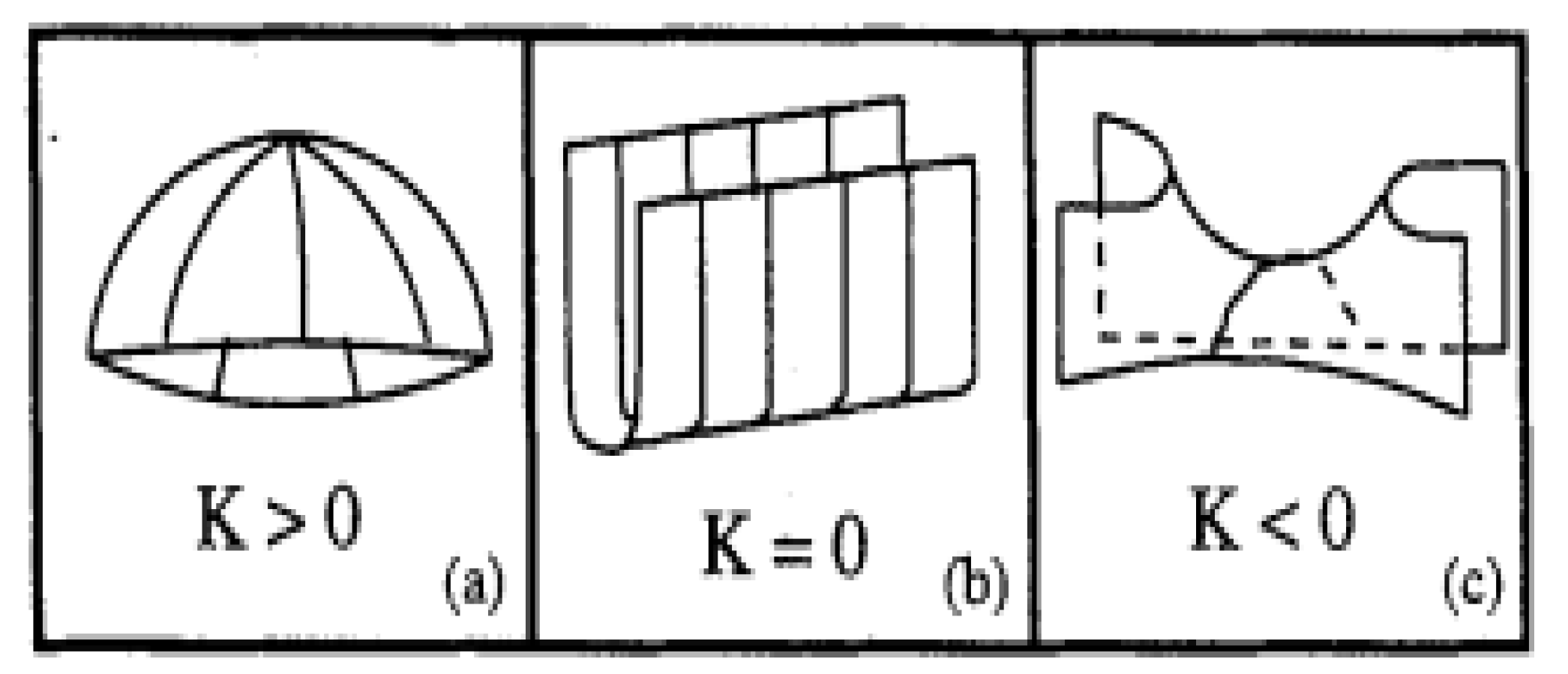
2.3. Different Approach to Gaussian and Mean Curvatures (Angular Technique) (c.f., [22])
A new formulation (c.f., [22]) is introduced for Gaussian Curvature and the Mean Curvature is are defined as
And
and as the principal curvatures are determined by:
where defines the shape of the surface. and are parallel to the directions of the principal curvature, which are rotated through an angle with respect to , and
The angle through which the coordinate frame is rotated to align the axes with the directions of the principal curvature at each point on the surface is given by
A contour plot of Gaussian curvature indicates where structures occur on a surface. If both principal curvatures are non- zero, the surface is said to have double curvature [22].
Figure 10.
(c.f., [22]). are slab structures- related by the three regions (a), (b), and (c).
Figure 10.
(c.f., [22]). are slab structures- related by the three regions (a), (b), and (c).
2.4. Well Defined Functions and Bijective Functions
1. function f is said to be one-to-one, or injective, if and only if f(x) = f(y) implies x = y for all x, y in the domain of f. A function is said to be an injection if it is one-to-one. Alternative: A function is one-to-one if and only if f(x) ≠ f(y), whenever x ≠ y. This is the contrapositive of the definition.
2.A function f from A to B is called onto, or surjective, if and only if for every b ∈ B there is an element a ∈ A such that f(a) = b. Alternative: all co-domain elements are covered.
3. A function f is called a bijection if it is both one-to-one (injection) and onto (surjection).
Definition 2.14(c.f., [25])
The solution of the cubic equation

is characterized arbitrarily by
where is given by
is called the discriminant of the cubic equation.
Preliminary Theorem(PT) 2.15 [26].
Let f be a function that is defined and differentiable on an open interval (c,d).
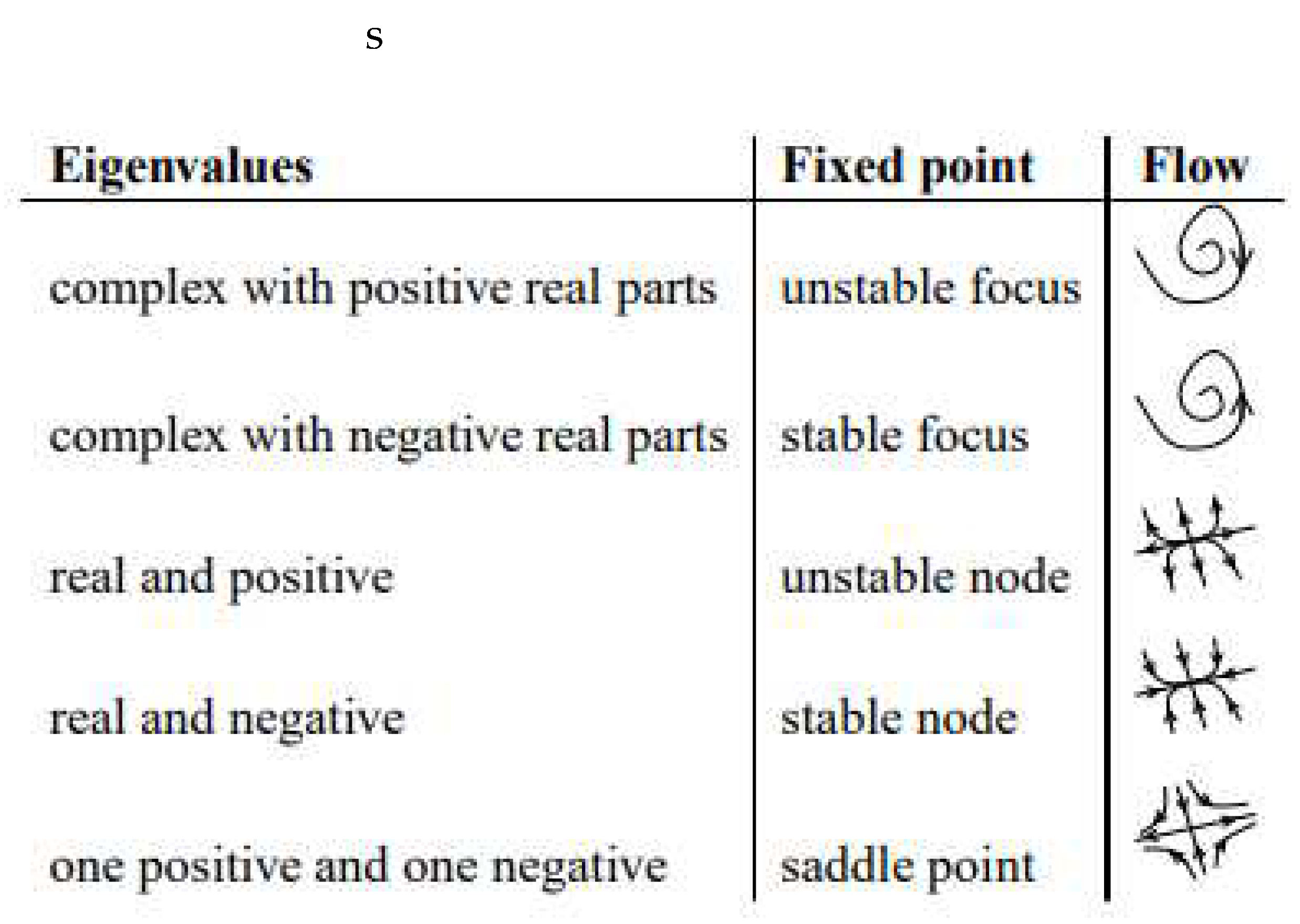
2.5. Stability Analysis for Ordinary Differential Equations (ODEs) [27]
Equilibria are not always stable. Since stable and unstable equilibria play quite different roles in the dynamics of a system, it is useful to be able to classify equilibrium points based on their stability. Suppose that we have a set of autonomous ordinary differential equations, written in vector form:
Suppose that is an equilibrium point. By definition,
Theorem 2.16 (c.f., [27])An equilibrium point of the differential equation 1 is stable if all the eigenvalues of, the Jacobian evaluated at , have negative real parts. The equilibrium point is unstable if at least one of the eigenvalues has a positive real part.
Figure 11.
(c.f., [27]).
Figure 11.
(c.f., [27]).
2.6. Scalar Curvature(Ricci Scalar), and Einestein Tensor,
The scalar curvature(Ricci Scalar), (c.f., [15]) measures RCT’s contraction(c.f., (2.12))
The two-dimensional Ricci Scalar, [28] is twice as the Gaussian Curvature (c.f., (2.25)),
provided that are determined by (2.27).
The Ricci scalar [15] has a similar meaning to ,
Ricci scalar completely captures the curvature of the surface.
The equations of motion of a classical theory like General Relativity can be derived directly from a suitable action by using the Euler-Lagrange equations, leading to the well-known Einstein equations [29]
where is the Curvature of Spacetime(Einstein tensor), , , namely , is the Ricci scalar or scalar curvature,is the universal gravitational constant,is the speed of light, and are the components of the stress-energy tensor,,as a descriptor of spacetime- matter-energy distributions.
2.7. Maxima and Minima of Functions of Two Variables [30]
Suppose that is a critical point of (i.e, ). Let’s denote:
This provides the critical point categories:
- If then there is a relative minimum at
- If then there is a relative maximum at
- If then the point
- If then the point may be a relative minimum, relative maximum, or a saddle point. Other techniques would need to be used to classify the critical point.
2.8. Continuous Functions (c.f., [31])
Theorem 2.16
A function is continuous at if and only if is defined on an open interval containing and for each there is a such that:
whenever .
2.9. The Maclauren’s Series of for (Shaw,2015)
3. The Fim and Its Inverse for the Stable M/G/1 QM
According to [32], the maximum entropy (ME) state probability of the generalized geometric solution of a stable M/G/1 queue (c.f., Figure. 12), subject to normalisation, mean queue length (MQL), L and server utilisation, (<1) is given by
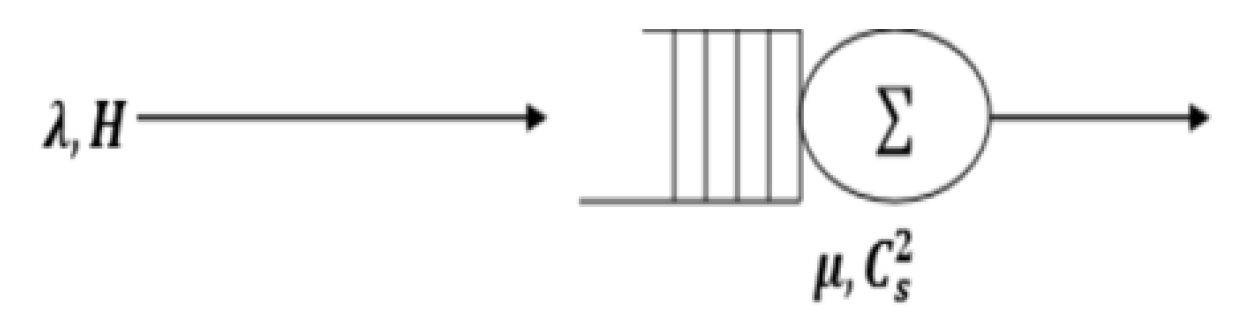
Figure 12.
where and , = 1 – of (3.1) reads as:
Theorem 3.1 The underlying QM satisfies:
(i) FIM reads as
(iii) [] reads as
Proof
(i)
Case I: . Thus,
Therefore,
FIM is given by:
reads as
Case II: For . Therefore, the coordinate system is two-dimensional satisfying:
We have
Thus, we have
FIM is given by = (3.16). This completes the proof of (i)
It could be verified that
Finally, after some manipulation, it could be shown that:
4. The α(. OR )-Connection of the M/G/1 QM
(2.8) implies:
Engaging the same logic, RCT’s remaining components can be determined.
5. Variational Inference, KD,JD,RÉNYI AND s AB DIVERGENCES OF STABLE M/G/1 QM
5.1. KD and JD Divergences of Stable M/G/1 QM
The following theorem characterizes both KD and JD of (2.5) and (2.6) respectively.
Theorem 5.1 The underlying QM satisfies:
defines the Mean Queue Length at Also,
where , defines the Mean Queue Length at
Proof
To show (i), the case for is straightforward. For It could be verified that, using (3.2), we have
After some few mathematical steps, it could be seen that:
By (5.4), it follows that KD will be determined by
()
(c.f., (5.1))
This completes the proof of (i).
To prove (ii), we have by (2.6) and (5.5Following some mathematical steps, (5.2) could be easily verified.
Clearly it follows from (5.2), that JD is also zero if and only if This present a novel result which declares the compressibility of the underlying QM if and only if it is stable or when p and q are identical, (i.e., It is observed by (5.1), that JD is dependent on and the MQL of Pollaczeck-Khinchin Formula of a stable M/G/1 QM at (which is dependent on . To examine the impact of on JD, the following experiment is introduced.
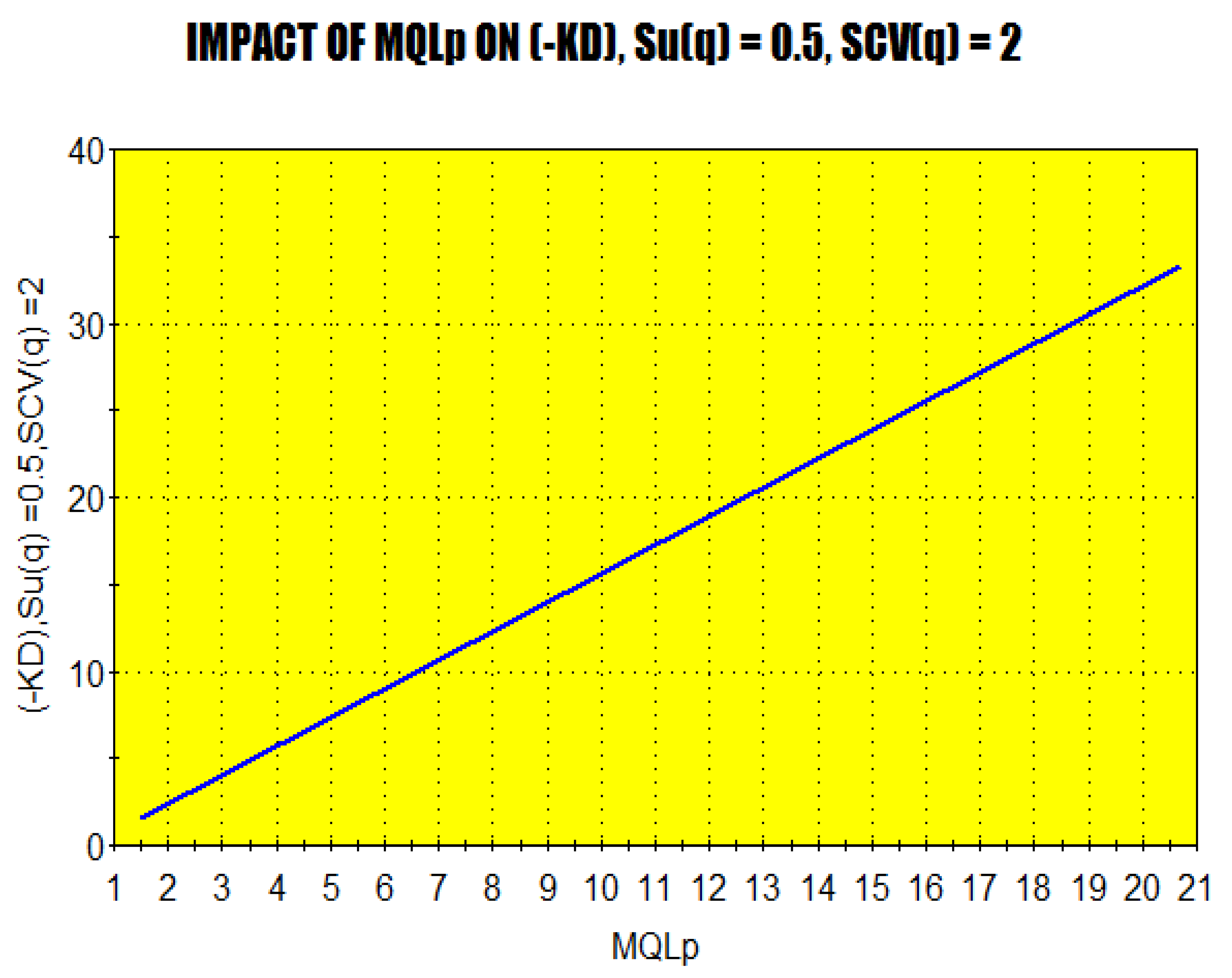
Figure 13.
Figure 13 depicts that KD is a negative decreasing function in MQL at p, This justifies that the increase of will have a significant impact on the decrease of KD. In other words, the increase of MQL at p, would enforce the distance between p and q to increase in magnitude.
Compressibility of M/G/1 QM could be identified visually by presenting the following numerical experiment:
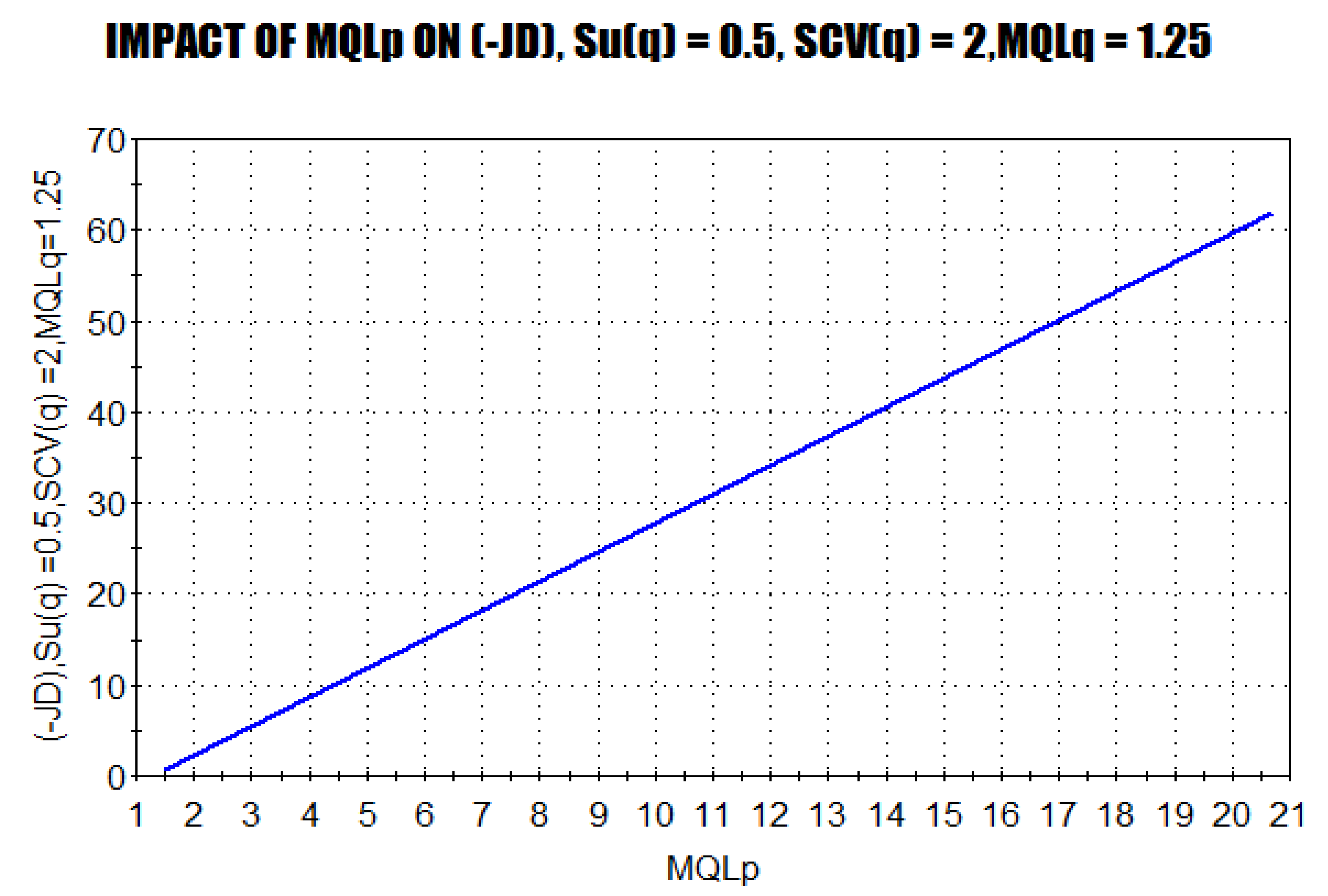
Figure 14.
The findings of figure 14, show that the increase of MQL at p impacts the the stable M/G/1 QM’s solenoidability of. As it observed that M/G/1 QM is solenoidal at the steady state phase of the QM. By the increase of , the stable M/G/1 QM is no longer solenoidal. This shows the direct impact of queueing parameters on the visualization of the regions of solenoidability of the stable M/G/1 QM.
Meanwhile, we have
Figure 15.
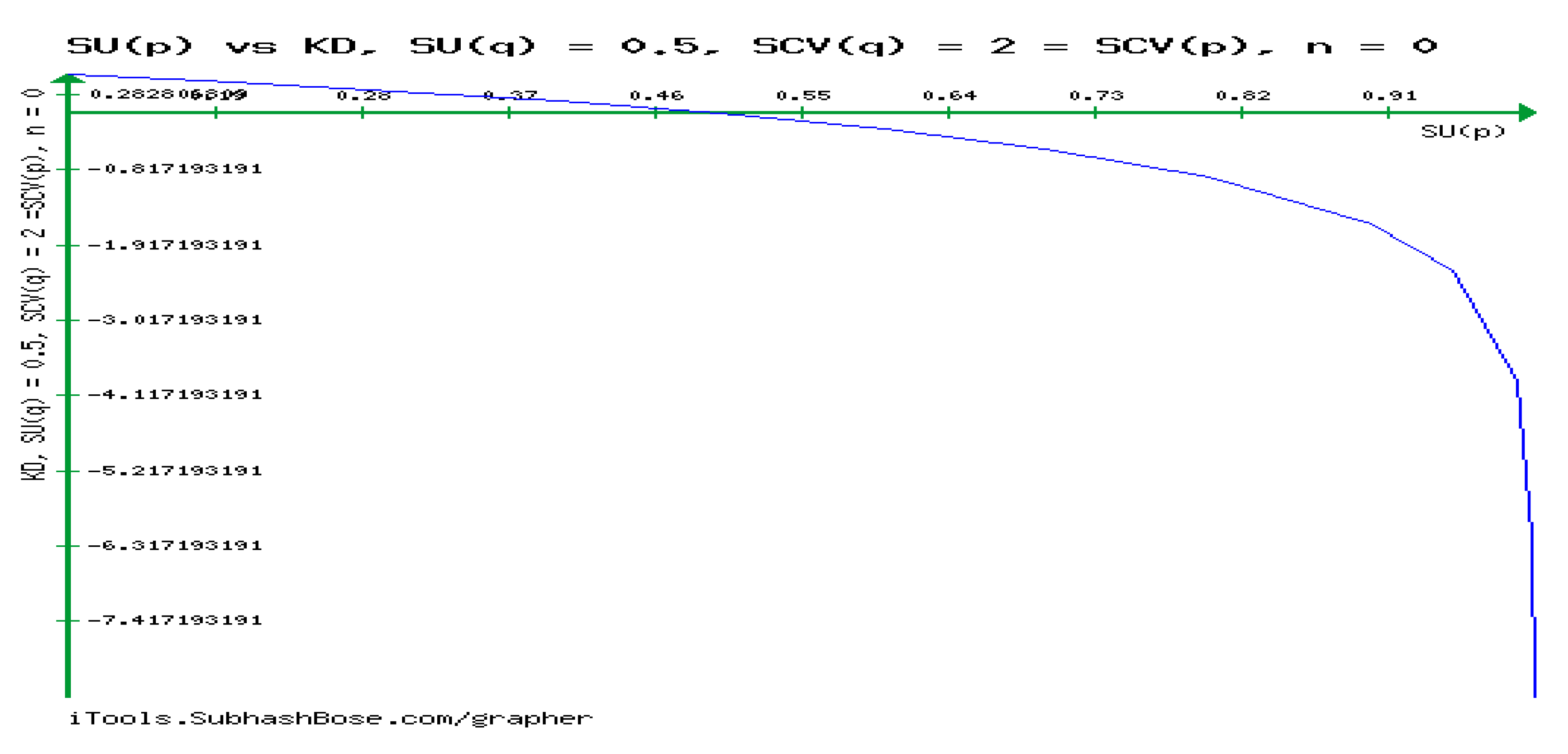
As observed by Figure 15, KD decreases and vanishes at = 0.5. by the increase of , KD decreases and tends to when the underlying M/G/1 QM approaches instability (= 1).
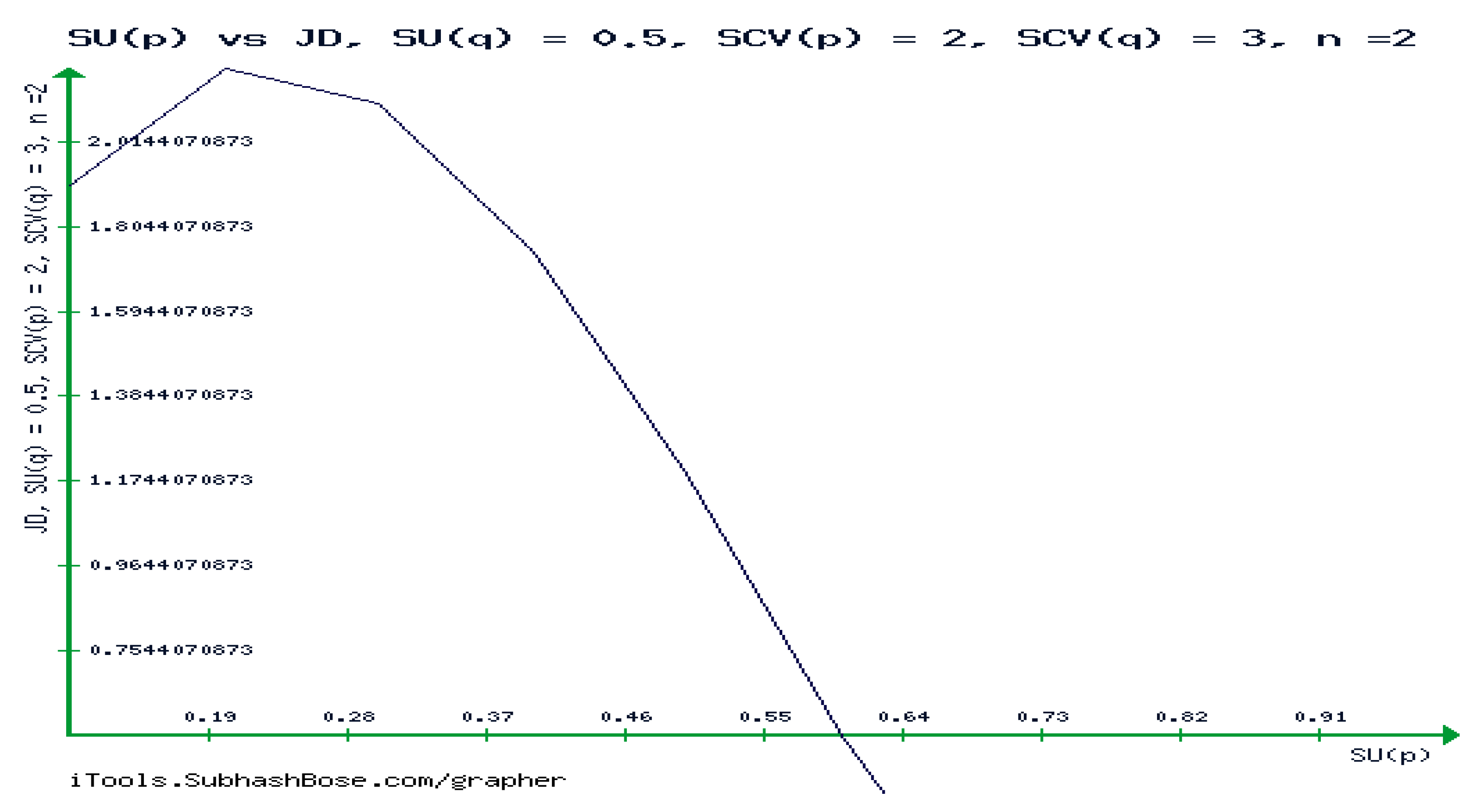
Figure 16.
(c.f., [27]).
Figure 16.
(c.f., [27]).
As observed by Figure 16, for n =2, KD increases for permissible values of SU(p) and starts to decrease at SU(p) = as we go along. Then, it decreases when SU(p) = 0.4. Afterwards, KD decreases unsoundly , speeding rapidly to . In this physical interpretation, stability has a significant impact on the behaviour of KD. In principle, it is uncovered that the stability of the M/G/1 QM has a significant impact on the performance of KD.
5.2. Rényi Divergence of Stable M/G/1 QM
Theorem 5.2 The underlying queueing system satisfies:
Proof
It could be easily checked that of (5.6) that:
as required.
It could be verified that for
We are done.
As = Data RNYI DIVERGENCE,RD
CASE ONE
Figure 17.
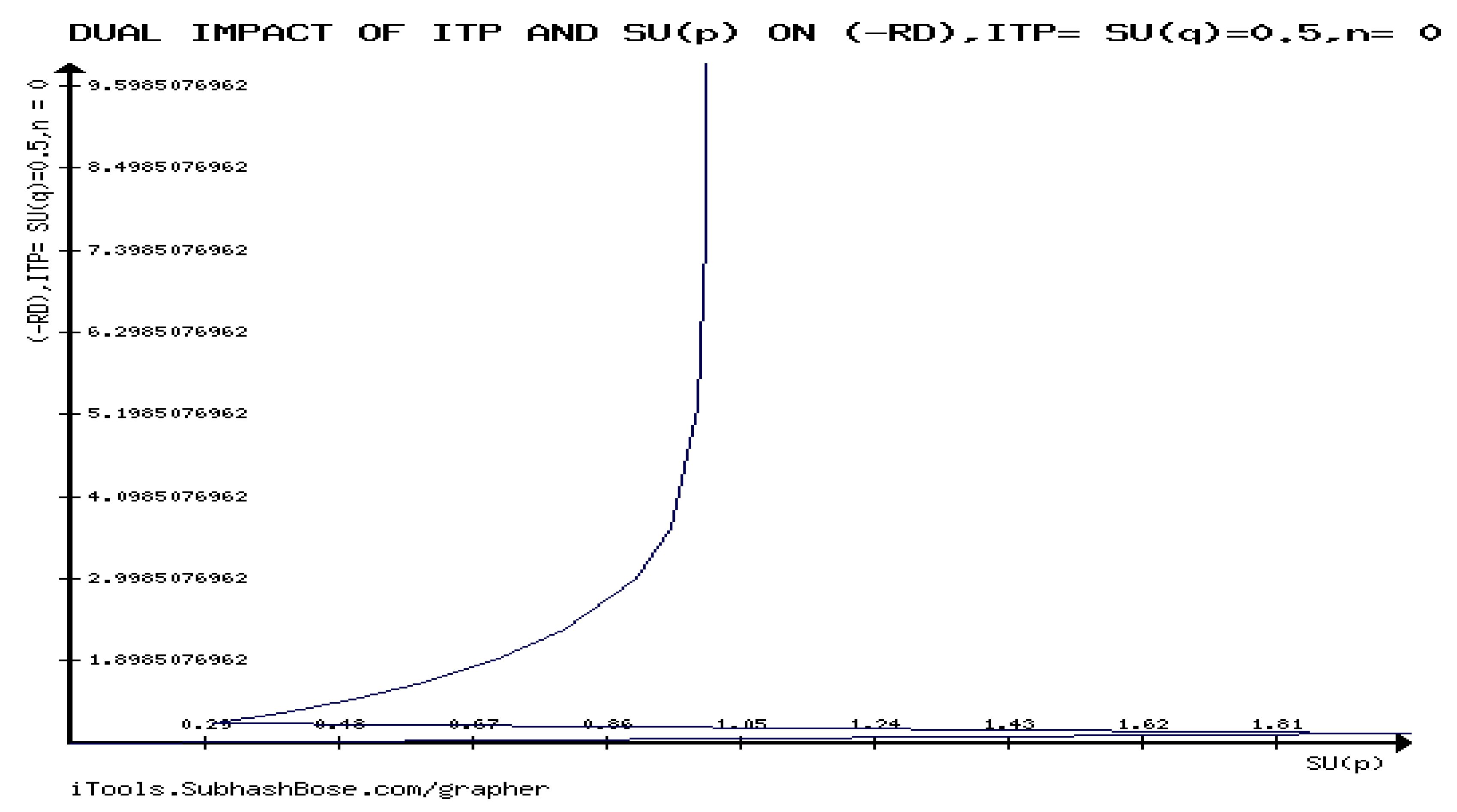
It is shown by Figure 17,RD is drastically decreasing until SU(p) is greater than 1, RD becomes imaginary number, i.e., the instability of M/G/1 QM occurs , RD becomes imaginary!!!
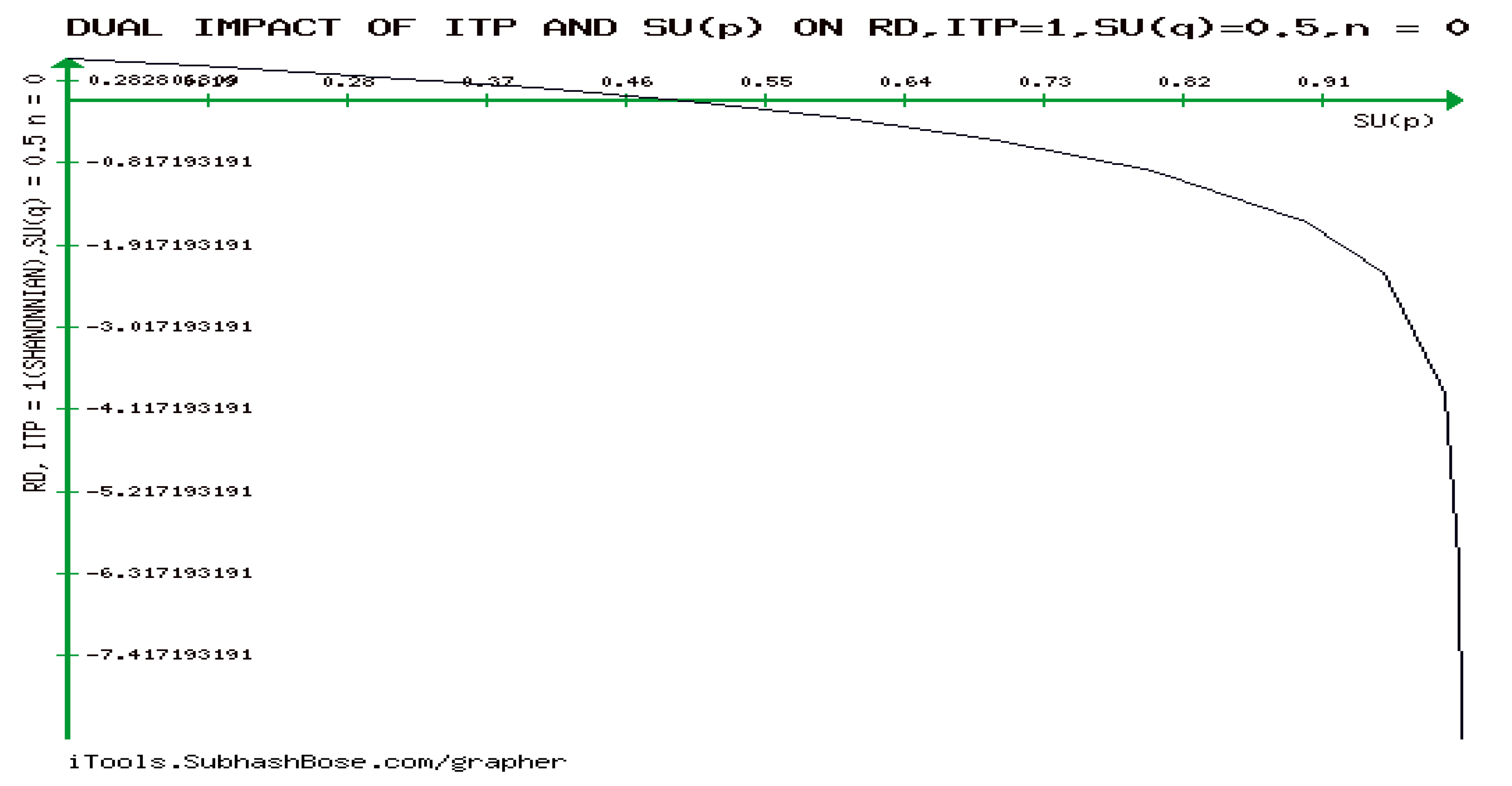
Following Figure 18, The decreasability of RD is clear because of the dual impact of Su(p) and ITP on RD.
As observed from figure 19, that RD increases rapidly by the increase of . It is expected that RD approaches infinity as approaches unity(i.e, M/G/1 QM is unstable at . To show this, we can take the limit of (5.9) as approaches unity. This directly implies that:
(p||, or
The devised corresponding absolute limiting value of RD is
(p|| =
5.3. sAB divergence, (p||q) of Stable M/G/1 QM
Before going into details, we need to prove the following important lemma as it is needed in the proofs.
Lemma 5.3 of (3.2) rewrites to
(5.10)
where , = 1 – and
Proof For , it is immediate by (3.2)
As forBy the MQL formula, we have . Hence, . This implies :
By (5.11) and (3.2), the proof follows.
Theorem 5.4 divergence vanishes,
(p||q) = 0
Proof For . hence, it follows by (2.10) that :
Theorem 5.5 For sAB divergence is determined by
for such that
Proof We have
, (c.f. (5.11) of Lemma 5.3)
Following (2.10),
It could be checked that RHS of (5.14) reduces after some lengthy computation to
Numerical experiment forData one:
Following (5.13), it can be verified after some manipulation, that for DITP = ()=(1,1),
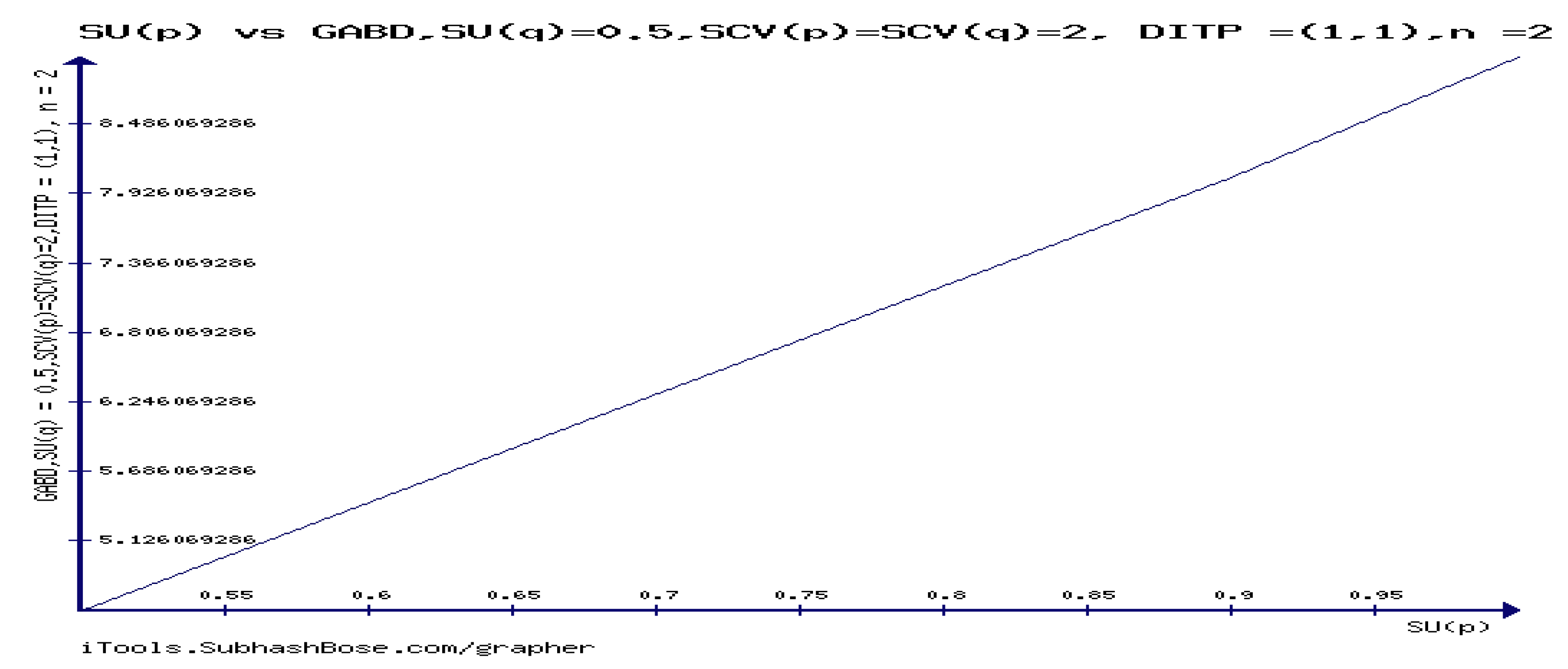
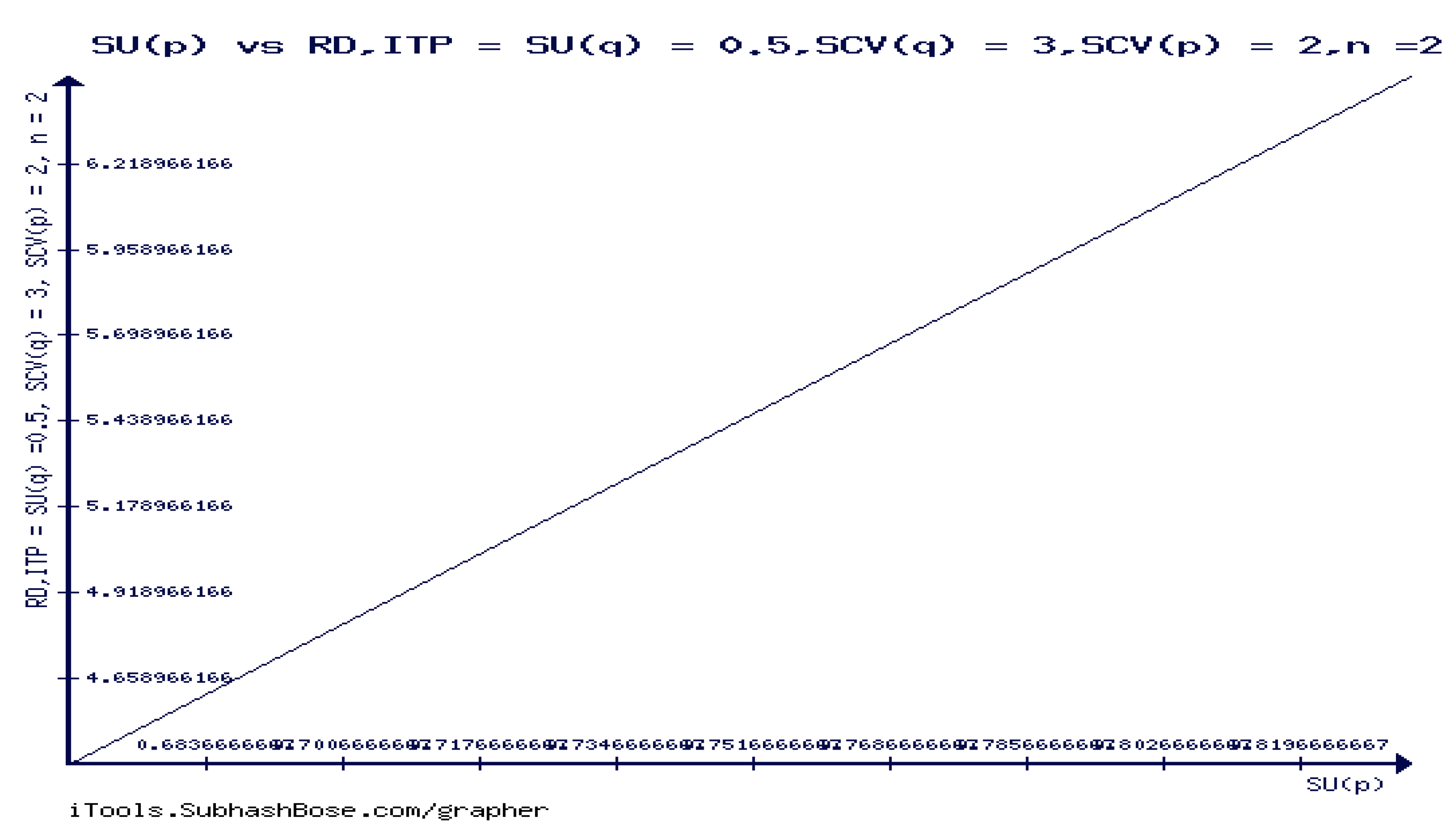
The increasability of the GENERALIZED ALPHA BETA DIVERGENCE(GABD) as SU(p) increases is obvious from figure 20.
DATA TWO
After some lengthy computation, it could be verified that for the non-extensive information theoretic dual, DITP= ,= As of M/G/1 QM ,
6. Investigations of the Developability of the Stable M/G/1 QM ,RICCI CURVATURE (RCT) tENSOR and QT-IG Unifiers
6.1. Investigation of Developability of M/G/1 QM and Finding Its Ricci Curvature Tensor (RCT)
Theorem 6.1
The stable M/G/1 QM
i) Has a zero 0-Gaussian curvature, for which the stable M/G/1 QM would be developable.
ii) Has a non-zero Ricci Tensor
iii) Is non-developable minimal surface under Monge Technique, with a zero Mean Curvature
iv) Is developable under Angular Technique if and only if M/G/1 QM unstable
v) If the underlying QM is unstable, then the Mean Curvature is negative under Angular Technique. The converse statement is not always true.
vi) The first principal curvature,
under the Angular Technique satisfies the inequality
vii) The second principal curvature,
under the Angular Technique.
viiii) Under the Angular Technique,
the second principal curvature,
tends to zero as
Proof
For i), we must prove :
It could be verified that,
(6.3)
. Hence,
, which proves that the underlying QM is developable subject to
.
ii) We must prove that:
We have
Engaging the same procedure as in (6.2), we have
(6.6). The corresponding Ricci Curvature Tensor is given by
As The highlights the significant influence of instability in a specific type of the underlying QM, by providing supporting evidence on how RCT is significantly impacted by the stability analysis of the system. The also shows that , represented by ,affects the behavior of RCT, and Figure 21 demonstrates that the stability phase of the M/G/1 QM causes RCT to decrease as ρ increases.
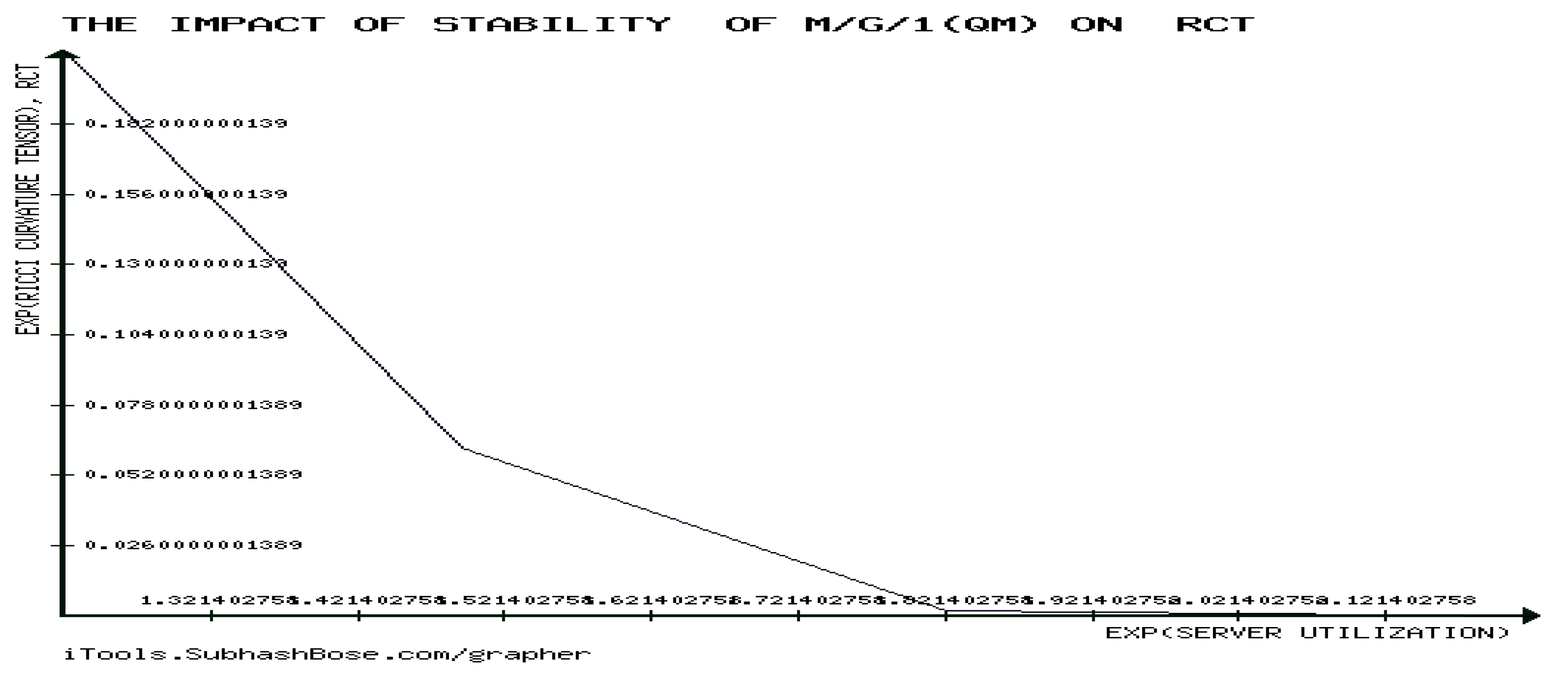
Figure 21.
whereas in Figure 22, RCT increasability in is caused by the underlying QM’s instability.
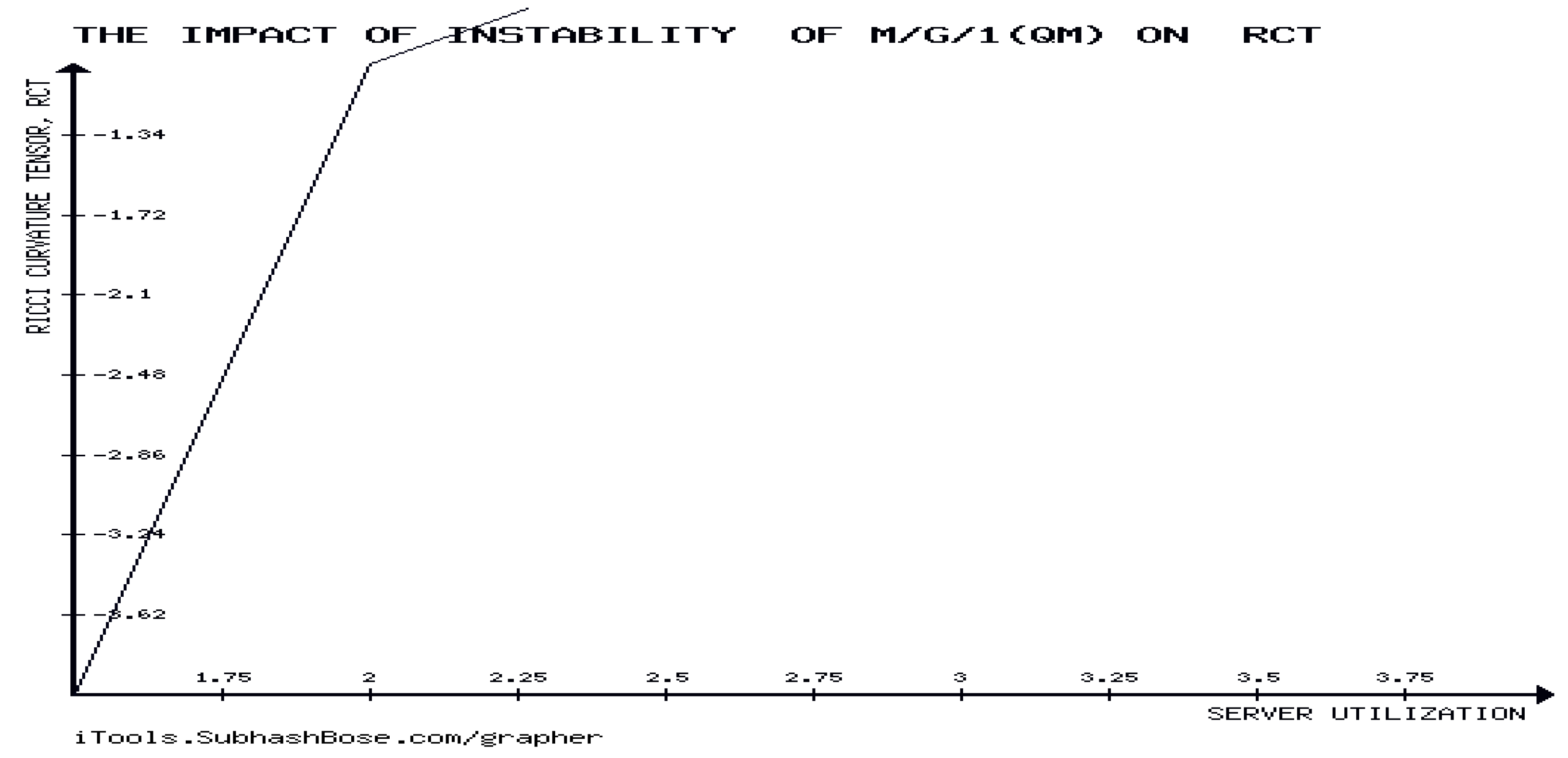
Figure 22.
iii) Following (3.14) and (3.15), it is clear that
Thus, we have
(3.15)
The Gaussian Curvature
And the Mean Curvature is
Therefore, it is obtained that
Since = it follows by the non- developability of the underlying QM and its minimal surface under Monge Technique.
The Mean Curvature is
Hence, iii) is done.
iv) Following the Angular Technique, it can be verified that the calculations of
the principal curvatures
are determined by
and
The axial rotator angle reads as
This implies, It appears from (6.10), that if and only if
This implies that:
The second possibility (
generates a contradiction as
is never negative.
Moreover,
Linking the findings of (6.13) and (6.15) completes the proof of iv).
As for v), it has been obtained that
This directly implies
It is clear that holds for all the possible values of Consequently, if or (equivalently, the underlying QM is unstable), itid="FD99
follows that To prove the necessity condition, assume that . This generates two possibilities:
The first possibility, . This implies . Hence, M/G/1 QM is unstable.
The second possibility, . This implies . Hence, M/G/1 QM is stable.
This justifies that the converse statement is not always true. The proof of v) is complete.
To show vi), we have
Since the underlying M/G/1 QM is assumed to be stable. Hence, Thus, we have
Therefore,
. Consequently,
By (6.17), it holds that vii) we have by (6.9), The stability of M/G/1 QMenforces the condition to hold. The negativity of is clear.
viii) Immediate from (6.15).
6.2. Revealing Novel QT-IG Unifiers and Discovering Their Algebraic Structures
Throughout this section, the following novel unifiers between both queueueing theoretic and information geometric structures of the stable M/G/ 1 QM are established by the following two unifiers,
Theorem 6.2.
For the above devised unifiers (c.f., (6.18) and (6.19)), it holds that
i)
is a well-defined function
is one-to –one.
iv)
is onto
v)
is bijection, with animaginary inverse
determined by
where
vi)
is a well-defined function
isone-to –one
x)
is onto
xi)
is bijection, with an imaginary inverse
(i.e., a complex number)determined by
where
xii) The underlying QM has inverse of
satisfies
xiii) The underlying of inverse of
satisfies
xiv)
in
are undecidable.
xv)and is never decreasing in To prove i), it is enough to show that for all such that , then should never be distinct.
Let . After some lengthy mathematical steps, (6.26)id="FD99
reduces to
Equation (6.28) generates three possible cases:
By
following mathematical analysis it holds that
Therefore,
which contradicts (6.29).
Based on the above analysis and by (6.29), i) follows.
ii) we have by (6.18),
Since
, it could be verified that
(6.33)
The case is clear. Also, for it is immediate that . This completes the proof of ii).
iii) It suffices to show that for all
such that
, then
holds. The proof is clearly immediate from (6.29).
iv) From the definition,
. Every
is characterized by
This clearly proves the surjectivity of
Hence, iv) follows.
v) Clearly,
is a bijection. To calculate the inverse of
. Define
. Hence,
. Let
. Then, we have the cubic equation:
Following the method for solving cubic equations (c.f., definition 2.14), we have
The solution of (6.34) is characterized arbitrarily by
The discriminant of the cubic equation
After some lengthy calculations, it can be verified that
where By (6.20), we have
where This completes the proof.
To prove vi), it is enough to show that for all such that , then should never be distinct.
Let . Then , such that This implies
Hence,
Equation (6.46) generates three possible cases:
By following mathematical analysis,
which directly implies by (6.47)
Based on the above analysis, vi) follows.
vii) It suffices to show that for all such that , then holds. The proof is clearly immediate from (6.47).
viii) Since M/G/1 QM is stable, the condition and a similar proof to that in ii), viii) follows.
The proof of x) is analogous to iii).
xi) We have (c.f., (6.21)).
Hence,
(6.52)
By (6.43),
This implies
Moreover, by the above step, it is clear that
Thus, it is obtained that
This completes the proof.
xii) The stability of the underlying QM implies We have
Hence,
Hence, (c.f., (6.23)). So, (6.56). Also, it can be verified that (6.57). Consequently, xiii) will follows.
xiv) we have = . Hence, if and only if . By (PT) 2.15, is increasing(decreasing) in if and only if . According to stability of M/G/1 QM, . Hence, it follows that .Consequently, xiv) follows:
xv) We have = . Hence, if and only if . By (PT) 2.15, is increasing(decreasing) in if and only if . According to stability of M/G/1 QM, . Consequently, xv) follows.
7. eFIM(M/G/1) & Impact of Stability of M/G/1 QM on the Stability of Fim
7.1 Exponential Matrix of FIM
Theorem 7.1eFIM(M/G/1) solves = Ax
Proof
It is shown that [gij]of Theorem (3.1) is:
We write
Thus,
.
Therefore,
=0, so .
Hence,
For
Thus, reads as:
This proves that IME of the underlying QM solves:
7.2. Impact of Stability of M/D/1 QM on the stability of FIM
Theorem 7.2 The stability of FIM of the underlying QM holds ⇔ the underlying QM is unstable.
Proof Following theorem 2.16, it suffices to show that:
FIM’s eigen values of FIM of the underlying QM are negative real numbers ⇔ the instability of the underlying QM is satisfied.

We first prove the necessity condition, M/G/1 QM is unstable. Assume that FIM is stable , then follws. This implies . Hence, . Consequently, . In other words, M/G/1 QM is unstable.
To prove sufficiency, let M/G/1 QM be unstable. Then, . This directly implies . This rewrite to be of the form . Clearly, this implies , , or . Thus, it holds that , which proves that FIM is stable.
7.3. Revealing Queue-Fisher Information Matrix Unifiers, (QFIMU)
Throughout this section, we introduce QFIMU, to be devised by the function:

where = 1 – and .
Theorem 7.3 The function (c.f., (7.7)) satisfies the following:
is ell defined.
ii) is One-to-One.
iii) is surjective.
iv) has a unique inverse, determined which is characterized by
and
Proof
To prove i), it suffices to show that for all such that and and
By (7.10), we have
and
By (7.11), one gets:
(7.13) implies either or (contradiction, since for example if M/G/1 QM). Therefore, the branch of the QIFMU is well-defined.
Following (7.12),
(7.14) implies either or (contradiction, since for example if M/G/1 QM). Therefore, the branch of the QIFMU is well-defined. This completes the proof of i).
As for ii), it suffices to show that all such that:
Clearly, by (7.13) and (7.14), (7.15) is satisfied. Hence, ii) follows.
Clearly, by (7.7), both and are uniquely characterized by respectively. Thus, iii) holds.
iv) To compute , assume that thee exists such that
Therefore,
And
Following (7.15), one gets
Using (7.16) and following a similar argument as in (7.17), we have
Based on (7.19) and (7.20), it is determined for both and branches of would respectively satisfy that
Following similar argument, it could be shown that
This completes the proof of our theorem.
8. RICCI SCALAR, , THE CORRESPONDING THRESHOLD THEOREMS FOR THE UNDERLYING CURVATURES AND THE DUAL QUEUEING IMPACT ON THE EXISTENCE OF THE INVERSE FISHER INFORMATION MATRIX (IFIM)
Theorem 8.1 The underlying QM satisfies:
i)The Ricci scalar subject to Angular Technique, is determined by
where = 1 – and define server utilization and Squared coefficient of variations respectively.
ii) if and only if iii) if and only if iv) M/G/1 QM is unstable (c.f., (2.45)) must satisfy:
v)The Spacetime curvature(Einestein Tensor) subject to Angular Technique, is determined by
where the components are determined by
where is the curvature parameter (c.f., definition (2.8))
vi)The stress-energy tensor ϖ is devised by
where the components are determined by
whereis the universal gravitational constant, is the speed of light
provided that
provided that
xii)is forever decreasing in (curvature parameter) whether M/G/1 QM is stable or unstable. If , the decreasability of in is undecidable.
xiii)is forever increasing(decreasing) in if M/G/1 QM is stable, .
xv)is forever decreasing in if the either one of the following branches hold:
xvi) is forever increasing in .
xvii) is forever increasing(decreasing) in if and only if 1(). If , the decision is undecidable.
Proof
i)Immediate by (6.9) and (2.44).
ii)By i), . Hence, if and only if . Since, 1, the required result follows.
iii)Since M/G/1 is a stable QM, holds. This implies for all ( if and only if . By , the proof follows.
iv)M/G/1 QM is unstable if and only if , or equivalently . This holds if and only if
This is equivalent to [1 ]By (2.46), - Hence, it follows that
Using (3.3) of Theorem 3.1, (6.50 of theorem (6.1) , (8.1) together with (8.18), (8.19), (8.20) and (8.21), the proof of v) and vi) will follow.
vii)It could be verified that:
Therefore,
if is satisfied satisfying , which or . Following the preliminary theorem (PT) 2.15, this implies is increasing in if and only if . For or , this enforces or , which violates the underlying QM’s stability, or , this enforces , which guarantees the stability of M/G/1 QM.
On the other hand, if , it holds by (PT) 2.15, that is decreasing in if and only ifthere exists satisfying , which . For or , this enforces or , which indicates the underlying QM’s instability. Moreover, or , this enforces , which violates the stability of M/G/1 QM.
Following the above analytic results, vii) and viii) are immediate.
x)It could be shown that
Undertaking similar mathematical mechanism as in vii) and viii), the proof follows.
xi) After some mathematical manipulation, we have
(8.25) provides an evidence that for all . Applying (PT) 2.15, shows that is forever increasing in . This is applicable for stable and unstable M/G/1 QM, with (since violates the continuity requirement of Furthermore, it could be proved that is increasing in when the underlying QM is in the stability phase.
Moreover,
Clearly from (8.26) and (PT) 2.16, , it follows thatis never increasing in (since violates the continuity requirement of . Let us assume that is never increasing in . This implies:
This is equivalent to (contradiction, since stability of M/G/1 QM enforces the requirements (0,1) and (1,)). This suggests that the only left possibility is that is forever increasing in , or equivalently by (PT) 2.15, to, a satisfied condition by stable M/G/1 QM.
xii) , implies by (PF) 2.15 that whether M/G/1 QM is stable or unstable. If , the decreasability of in is undecidable, since this means Furthermore, . Consequently, 0 if and only if M/G/1 QM is stable, , , 0 if and only if M/G/1 QM is stable, . By (PT) 2.15, it follows that is forever increasing(decreasing) in if M/G/1 QM is stable, . This proves xiii).
Engaging the same technique proves xv).
We have
Engaging our technique, the reader can easily verify that both xvi) and xvii) will hold. The completes the proof of our theorem.
Theorem 8.2 The underlying QM satisfies:
i)Ricci scalar subject to Monge Technique, is determined by
ii)(c.f., (2.45)) must satisfy
iii)The Spacetime curvature(Einstein Tensor) subject to Angular Technique, is determined by:
where the components are determined by
where is the curvature parameter (c.f., definition (2.8))
iv) The stress-energy tensor ϖ is devised by
where the components are determined by
whereis the universal gravitational constant, is the speed of light
vi) is forever decreasing in (curvature parameter) whether M/G/1 QM is stable or unstable. If , the decreasability of in is undecidable.
vii)is forever increasing(decreasing) in if M/G/1 QM is stable, .
viii)is forever decreasing in if the either one of the following branches hold:
x) is forever increasing in .
xi) is forever increasing(decreasing) in if and only if 1(). If , the decision is undecidable.
Proof
i)By (6.7), we have =Following (2.44), we have 2(c.f., (8.29)).
ii)Since . Hence,
This is equivalent to [1 ]By (2.46), - Hence, it follows that:
Using (3.3) of Theorem 3.1, (6.50 of theorem (6.1) , (8.29) together with (8.42), (8.43), (8.44) and (8.45), the proof of iii) and iv) will follow.
The remaining proofs of v), vi), vii), viiii), x) and xi) are omitted since they are provable by following the same analytic mechanism undertaken in (8.13)-(8.17).
Theorem 8.3 The underlying QM satisfies:
has a relative minimum at ()
ii) Both maxima and minima for all the components of the Spacetime curvature(Einestein Tensor) subject to Angular Technique, is undecidable.
Proof
i)We have , (c.f., (8.22) and (8.24)) respectively. Hence, The critical points are . Moreover, we have
Hence, by (2.47)
Since , it holds that is a relative minima for similarly, is a relative minima for
ii) As for , we have , = (c.f., (8.25) and (8.26)).
Hence, the critical point are . Clearly, are never permissible since, M/G/1 is stable. Thus, no conclusion can be drawn for Engaging the same procedure, it could be verified that both maxima and minima for all the remaining components of the Spacetime curvature(Einstein Tensor) subject to Angular Technique, is undecidable.
Theorem 8.4 The underlying QM satisfies:
is undecidable.
ii) Both maxima and minima for all the components of the Spacetime curvature(Einstein Tensor) subject to Monge Technique, is undecidable.
Proof
i) (8.29).Hence, for all . It can be shown that of (2.47) is zero. Hence i) follows.
ii)The proof is immediate for , since it is zero(c.f.(8.33)). By (8.32), . We have , = (=0 if and only if . Hence, both maxima and minima is undecidable for .Finally, (c.f., (8.34)). . Therefore, if and only if . Consequently, it is not possible to decide maxima and minima for .
The following theorem captures the impact of stability(instability) of M/G/1 QM on the increasability (decreasability) of the only non-zero component of Ricci Curvature Tensor(RCT), Theorem 8.5 The underlying QM satisfies:
is forever increasing in unstable.
forever decreases in if and only if M/G/1 QM is stable.
Proof
i)Necessity:
Assume that M/G/1 QM is unstable, then We have . By , which directly implies by (PT) 2.15 that is forever increasing in .
Sufficiency:
Let be forever increasing in , then by (PT) 2.15, . This implies . Hence, This proves i).
Engaging the same procedure, ii) follows.
The following theorem captures the dual impact between (IG) and Queueing Theory. This dual impact is influencing the existence of FIM (c.f.,(3.3)) upon the behaviour of .
Theorem 8.6 The underlying QM satisfies:
is forever increasing(decreasing) in (stable) unstable.
is forever increasing(decreasing) in (unstable) stable.
3)The inflection point of with respect to is at , where changes its behaviour around this threshold
Proof
1)We have [] = =(c.f., (3.5) of Theorem 3.1) . Therefore,
By (8.49), if and only if or
Clearly from (8.50), it follows that:
By (PT) 2.15, the proof of 1) follows.
2) We have
By (PT) 2.15, the proof of 2) follows.
3)It is straightforward to see that(8.54)
if and only if , which implies by 1) and 2) that the proof of 3) follows.
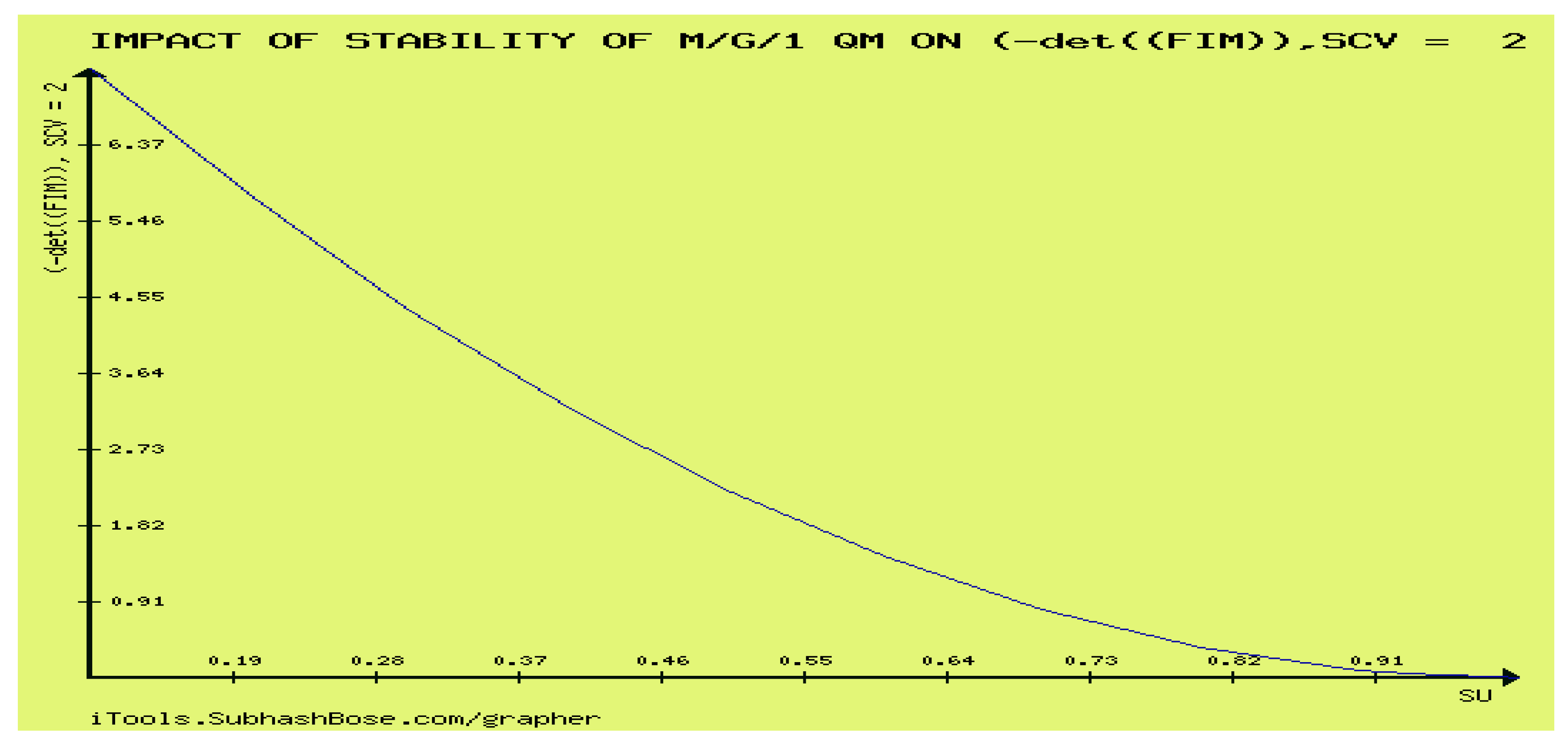
As observed in Figure 23, det(IFIM) is increasing in server utilization if and only if M/G/1 QM is stable. Also, this proves how the stability of the underlying QM impacts the existence of .
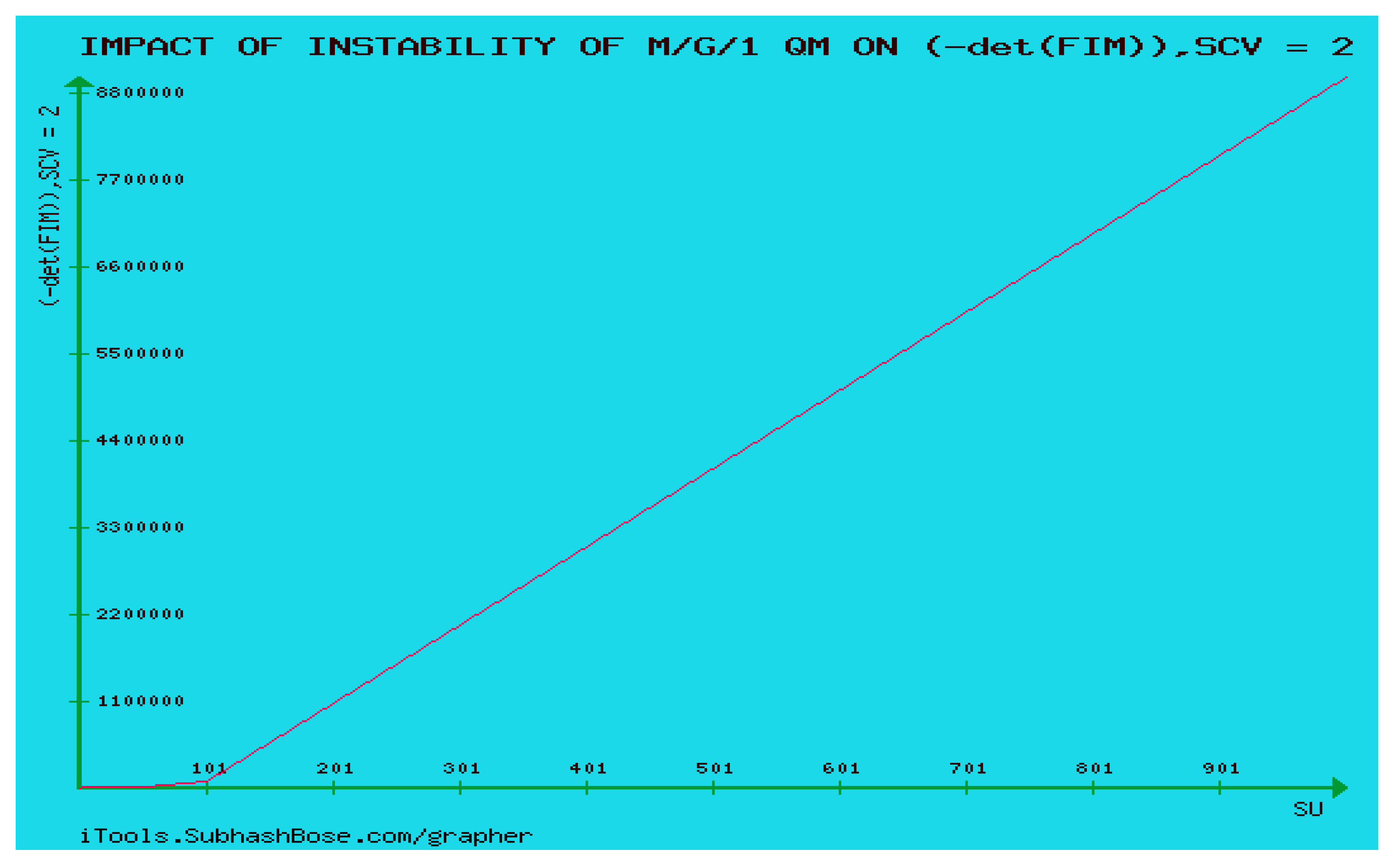
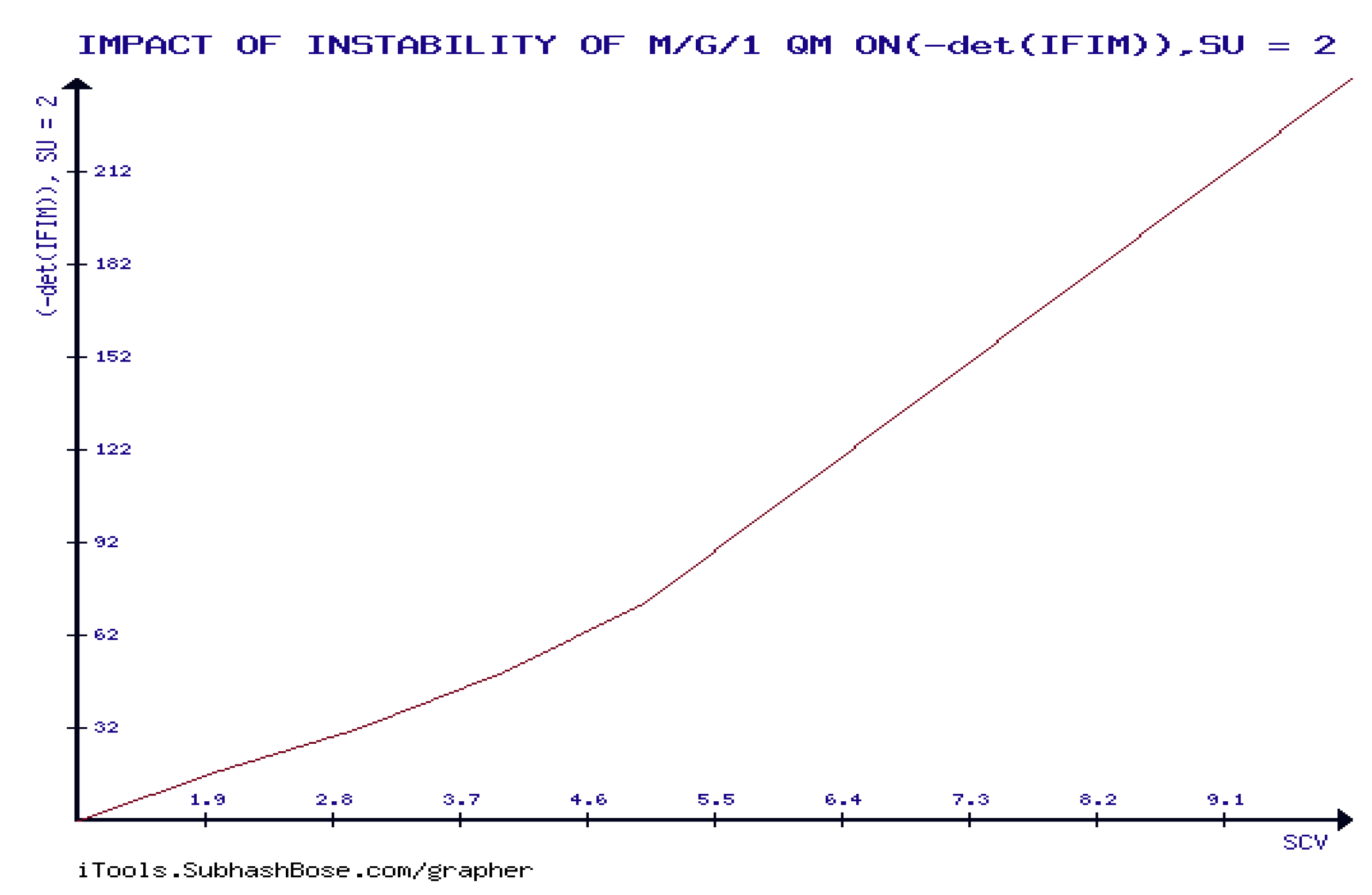
As observed in Figure 24, instability of M/G/1 QM is unstable decreases in CASE THREE:
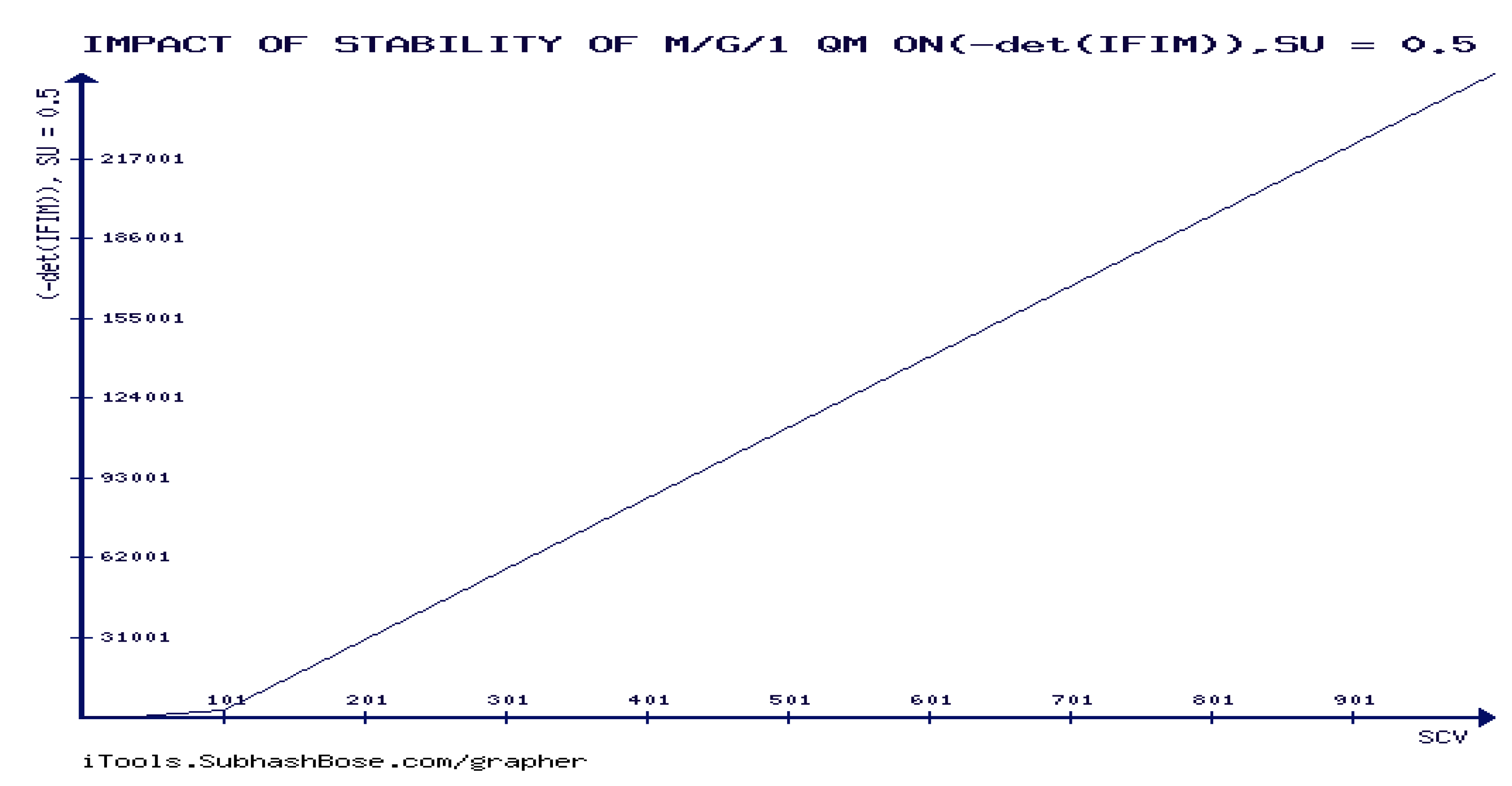
Figure 25.
As seen above in Figure 25, det(IFIM) is forever decreasing in SCV if and only if M/G/1 QM is stable.
As observed in Figure 26, within the instability phase of M/G/1 QM, , det(IFIM) is decreasing in CASE FIVE:
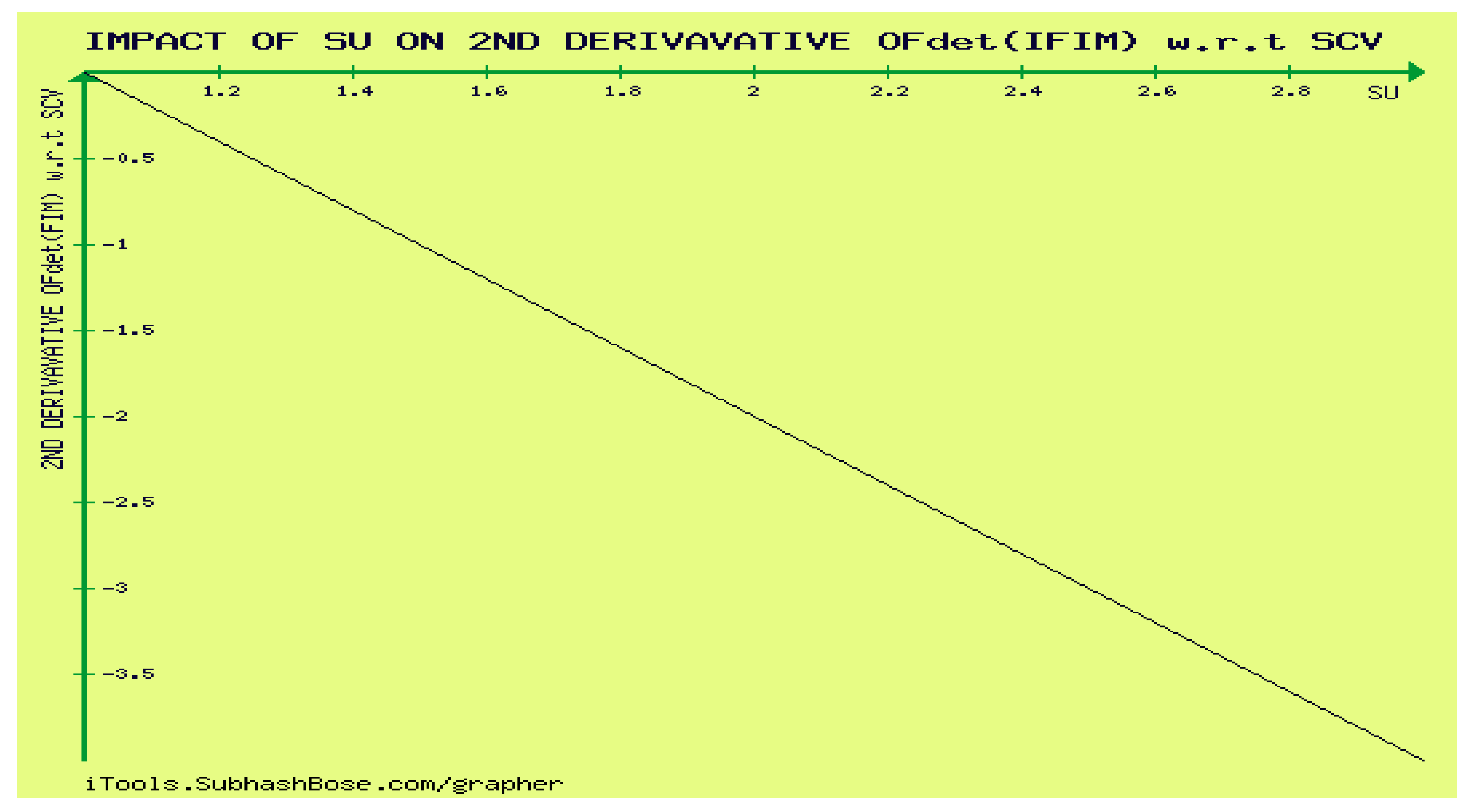
Figure 27.
Figure 27 justifies that the threshold of stability of M/G/1 QM, , would be the inflection point of det(IFIM) as well as being the decision parameter which controls the existence of inverse of (IFIM).
Define (QIGUs) by the triad functions, namely , with
: M/G/1 QM, where = (c.f.,(3.3) of Theorem 3.1)
provided that are determined by (3.7),(3.14) of Theorem 3.1 respectively.
9. Queueing Theoretic Impact on the Continuity of New Devised Queueuing-Information Geometric Unifiers (QIGU)
Theorem 9.1For the stable M/G/1 QM
1) is continuous, for is well-defined.
3) is one-to-one.
4) is onto.
5) The inverse function of is characterized by, = 6) is continuous, for is well-defined.
8) is one-to-one.
9) is onto.
10) The inverse function of is characterized by, = 11) is well defined.
12)is continuous if and only if M/G/1 QM is stable.
13) is discontinuous the instability of the underlying QM is satisfied.
14) is one-to-one.
15)is onto.
16) The inverse function of is characterized by, = 17) characterizes a family of non-well defined functions
18) is continuous if and only if M/G/1 QM is stable.
19) is discontinuous the instability of the underlying QM is satisfied.
Proof
1)Let such that there is a satisfying
Clearly by (2.48), the proof 1) follows.
It is also clear that if either . Then, the the underlying QM is unstable, which implies by (9.2), that This implies that is discontinuous at 2) Let Assume that Hence, , equivalently, . This means, We have to reject , . Also, is impossible since Clearly, a contradiction follows. Therefore, 2) holds.
3), then following the same proof as in 2) implies that . This proves 3).
4) Obviously, every uniquely characterizes such that = Hence, is onto.
5) Assume . Hence,
which proves 5).
6)Let such that there is a satisfying
Clearly by (2.48), the proof 6) follows.
7) Let Assume that Hence, , equivalently, . This means, We must reject , . Also, is impossible since Clearly, a contradiction follows. Therefore, 7) holds.
It is also clear that even if the underlying QM is unstable(or equivalently, which implies by (9.5), that This implies that is everywhere continuous.
Engaging the same procedure as in 3) and 4), the proofs of 8) and 9) are easily verified respectively.
10)Assume . These leaves one choice,
This shows that , = which proves 10).
11)Let Assume that Hence, , equivalently, . This means, Clearly, a contradiction follows. Therefore, 12) holds.
12) Necessity: Assume that M/G/1 QM is stable, then Suppose that there is a satisfying:
It is well known that Maclauren’s series of , for is determined by
Thus, it follows that
This proves continuity.
Sufficiency:
By (9.12), there exists , , with , satisfying, (9.7) and (9.12). Consequently, , which directly implies the underlying QM’s stability.
13) Following (9.12), discontinuity of occurs if and if to enforce to be infinite of any negative real number. Therefore, 13) holds.
The validity of both 14) and 15) can easily be verified.
Assume . Thus, it holds that . Consequently, . This shows that , = , which proves 16).
17) Let Assume that Hence,
. This means,
By (9.13), 17) holds.
It is obvious that is continuous for all. This proves the necessity requirement. As for the sufficiency requirement, let be continuous. This directly implies that attains non- infinite real values. Consequently, . Hence, the underlying M/G/1 QM is stable. This proves 18).
To prove 19), it is clear that is discontinuous if and only if both is discontinuous. This is equivalent to . Equivalently, M/G/1 QM is unstable.
10. Closing Remarks with Next Phase Research
This paper discusses the application of information geometric concepts in queueing theory, specifically focusing on the specified QM. It introduces the Fisher information metric, the 𝛼-connection, and analyses the geometric properties of the queue manifold, such as Gaussian and Ricci curvatures. The paper also highlights the potential for further research in IG unification with existent knowledge of scientific fields.
References
- Mageed IA, Yuyang Zhou, Y, Liu, Y, and Zhang Q(a), “ Towards a Revolutionary Info-Geometric Control Theory with Potential Applications of Fokker Planck Kolmogorov(FPK) Equation to System Control, Modelling and Simulation”,In2023 28th International Conference on Automation and Computing (ICAC) 2023, 30th Aug- Sep 1. IEEE.
- Mageed IA, Yuyang Zhou, Y, Liu, Y, and Zhang Q(b), “Zab of the Stable Five-Dimensional M/G/1 Queue Manifold Formalism’s Info- Geometric Structure with Potential Info-Geometric Applications to Human Computer Collaborations and Digital Twins”,In2023 28th International Conference on Automation and Computing (ICAC) 2023, 30th Aug- Sep 1. IEEE.
- Mageed, I.A, Info-Geometric Analysis of Gamma Distribution Manifold with Gamma Distribution Impact to Advance Satellite Earth Observations, The 2nd International Conference on Applied Mathematics, Informatics, and Computing Sciences (AMICS 2023), Ghent University, Belgium.
- A. Mageed, Q. Zhang, T. C. Akinci, M. Yilmaz and M. S. Sidhu, “Towards Abel Prize: The Generalized Brownian Motion Manifold’s Fisher Information Matrix With Info-Geometric Applications to Energy Works,” 2022 Global Energy Conference (GEC), Batman, Turkey, 2022, pp. 379-384. [CrossRef]
- Mageed, I.A, Info-Geometric Analysis of Gamma Distribution Manifold with Gamma Distribution Impact to Advance Satellite Earth Observations, The 2nd International Conference on Applied Mathematics, Informatics, and Computing Sciences (AMICS 2023), Ghent University, Belgium.
- A Mageed, D.I. Info- Geometric Analysis of the Stable G/G/1 Queue Manifold Dynamics With G/G/1 Queue Applications to E-health. Preprints 2024, 2024011813. [CrossRef]
- I.A. Mageed, and D.D. Kouvatsos, The Impact of Information Geometry on the Analysis of the Stable M/G/1 Queue Manifold. In Proceedings of the 10th International Conference on Operations Research and Enterprise Systems—Volume 1: ICORES, ISBN 978-989-758-485-5, 2021, p. 153-160. [CrossRef]
- I.A. Mageed, and Kouvatsos, D.D., 2019, Information Geometric Structure of Stable M/G/1 Queue Manifold and its Matrix Exponential, Proceedings of the 35th UK Performance Engineering Workshop, School of Computing, University of Leeds, Edited by Karim Djemame, 16th of Dec.2019, p.123-135. [Online] at: https://sites.google.com/view/ukpew2019/home.
- MIT Open Course Ware,2010. Online available at: https://ocw.mit.edu/courses/mathematics/18-02sc-multivariable-calculus-fall-2010/4.-triple-integrals-and-surface-integrals-in-3-space/part-b-flux-and-the-divergence-theorem/session-84-divergence-theorem/MIT18_02SC_MNotes_v10.1.pdf.
- A Mageed, D.I. On the Rényi Entropy Functional, Tsallis Distributions and Lévy Stable Distributions. Preprints 2024, 2024011996. https://doi.org/10.20944/preprints202401.1996.v1.
- Grivel, E., Diversi, R., & Merchan, F. (2021). Kullback-Leibler and Rényi divergence rate for Gaussian stationary ARMA processes comparison. Digital Signal Processing, 116, 103089.
- Cai, T. T., Guo, Z., & Ma, R. (2023). Statistical inference for high-dimensional generalized linear models with binary outcomes. Journal of the American Statistical Association, 118(542), 1319-1332.
- Marmin, A., de Morais Goulart, J. H., & Févotte, C. (2023). Majorization-minimization for Sparse Nonnegative Matrix Factorization with the β-divergence. IEEE Transactions on Signal Processing.
- Cilingir, K., Manzelli, R., Kulis,B., 2020, Deep Divergence Learning. Online available at; arXiv:2005.02612v1.
- Chow, B., Lu, P., & Ni, L. (2023). Hamilton’s Ricci flow (Vol. 77). American Mathematical Society, Science Press.
- Gilkey, P., Brozos-Vazquez, M., Garcia-Rio, E., Nikčević, S., & Vásquez-Lorenzo, R. (2022). The geometry of Walker manifolds. Springer Nature.
- Bachmann, Gregor, Gary Bécigneul, and Octavian Ganea. “Constant curvature graph convolutional networks.” In International conference on machine learning, pp. 486-496. PMLR, 2020.
- Sun, Ao. “Compactness of constant mean curvature surfaces in a three-manifold with positive Ricci curvature.” Pacific Journal of Mathematics 305, no. 2 (2020): 735-756.
- Meyer, Carl D., and Ian Stewart. Matrix analysis and applied linear algebra. Society for Industrial and Applied Mathematics, 2023.
- Zhang, Yuzhe, and Jianmin Zheng. “An Overview of Developable Surfaces in Geometric Modeling.” Recent Patents on Engineering 16, no. 5 (2022): 87-103.
- Kamarudzaman, Anis Solehah Mohd, Nurul Huda Mohamad Nasir, and Md Yushalify Misro. “Gaussian and Mean Curvature of Biquintic Trigonometric Bézier Surface.” Pertanika Journal of Science & Technology 30, no. 2 (2022).
- Wang, Jianchao, Huilin Xing, Zongwei Jin, Yuyang Tan, Shuo Pang, and Junbiao Liu. “3D geometric modelling of the Northwest Pacific slabs: A review and new high-precision model.” Earth-Science Reviews (2023): 104351.
- Banica, Teo. “Calculus and applications.” arXiv preprint arXiv:2401.00911 (2024).
- Latayada, Mary Joy R. “On the Number of Restricted One-to-One and Onto Functons Having Integral Coordinates.” European Journal of Pure and Applied Mathematics 16, no. 4 (2023): 2751-2762.
- Irving, Ron. Beyond the quadratic formula. Vol. 62. American Mathematical Soc., 2020.
- Mageed, I. A., & Zhang, Q. (2023). Threshold Theorems for the Tsallisian and Rényian (TR) Cumulative Distribution Functions (CDFs) of the Heavy-Tailed Stable M/G/1 Queue with Tsallisian and Rényian Entropic Applications to Satellite Images (SIs). electronic Journal of Computer Science and Information Technology, 9(1), 41-47.
- Roussel, M., R., April 2019, Stability Analysis for ODEs, Morgan & Claypool Publishers.
- Schloss, James, Peter Barnett, Rashi Sachdeva, and Thomas Busch. “Controlled creation of three-dimensional vortex structures in Bose-Einstein condensates using artificial magnetic fields.” Physical Review A 102, no. 4 (2020): 043325.
- Bailes, Matthew, Beverly K. Berger, P. R. Brady, M. Branchesi, Karsten Danzmann, M. Evans, Kelly Holley-Bockelmann et al. “Gravitational-wave physics and astronomy in the 2020s and 2030s.” Nature Reviews Physics 3, no. 5 (2021): 344-366.
- Dawkins, P., 2021, Paul’s Online Notes, web source. Online available at: https://tutorial.math.lamar.edu.
- Breneman, James E., Chittaranjan Sahay, and Elmer E. Lewis. Introduction to reliability engineering. John Wiley & Sons, 2022.
- A. Mageed and Q. Zhang, “An Information Theoretic Unified Global Theory For a Stable M/G/1 Queue With Potential Maximum Entropy Applications to Energy Works,” 2022 Global Energy Conference (GEC), Batman, Turkey, 2022, pp. 300-305. [CrossRef]
Figure 1.
SM’s parametrization [3].
Figure 1.
SM’s parametrization [3].
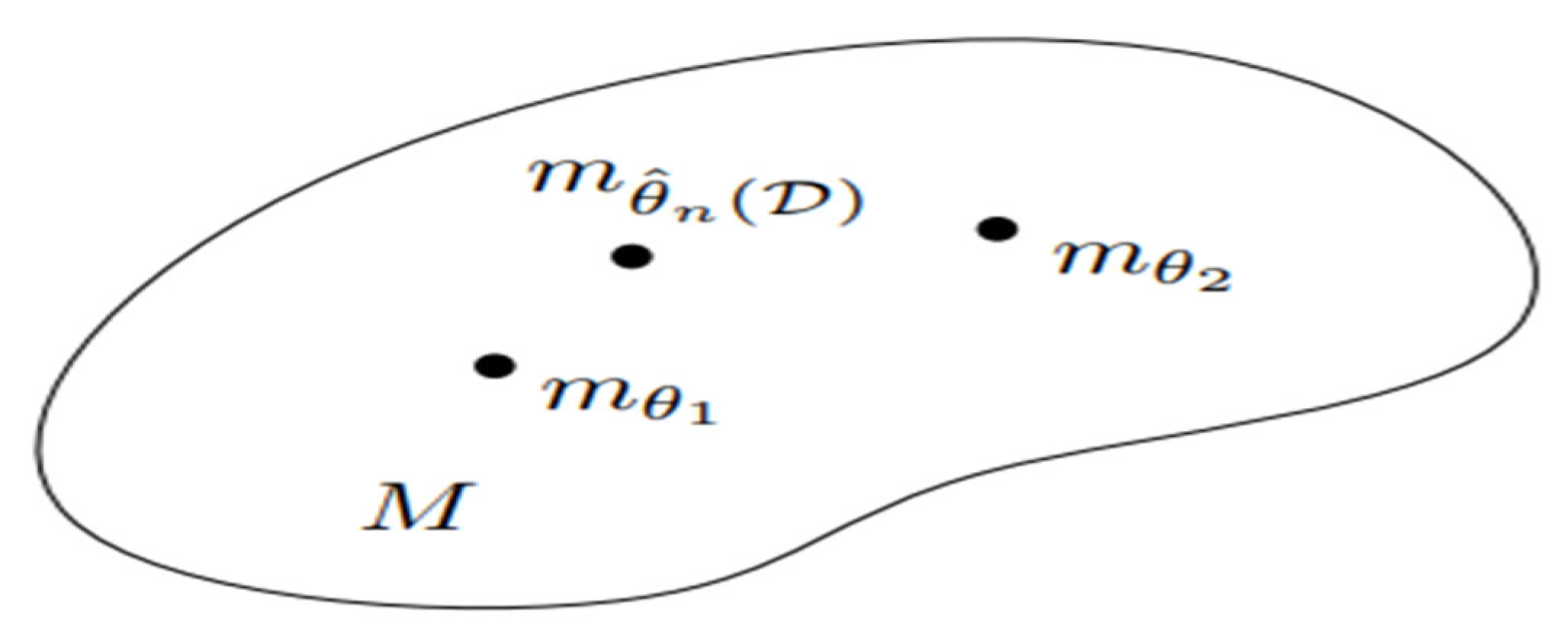
Figure 2.
curved surfaces’ geodesic representation [6].
Figure 2.
curved surfaces’ geodesic representation [6].
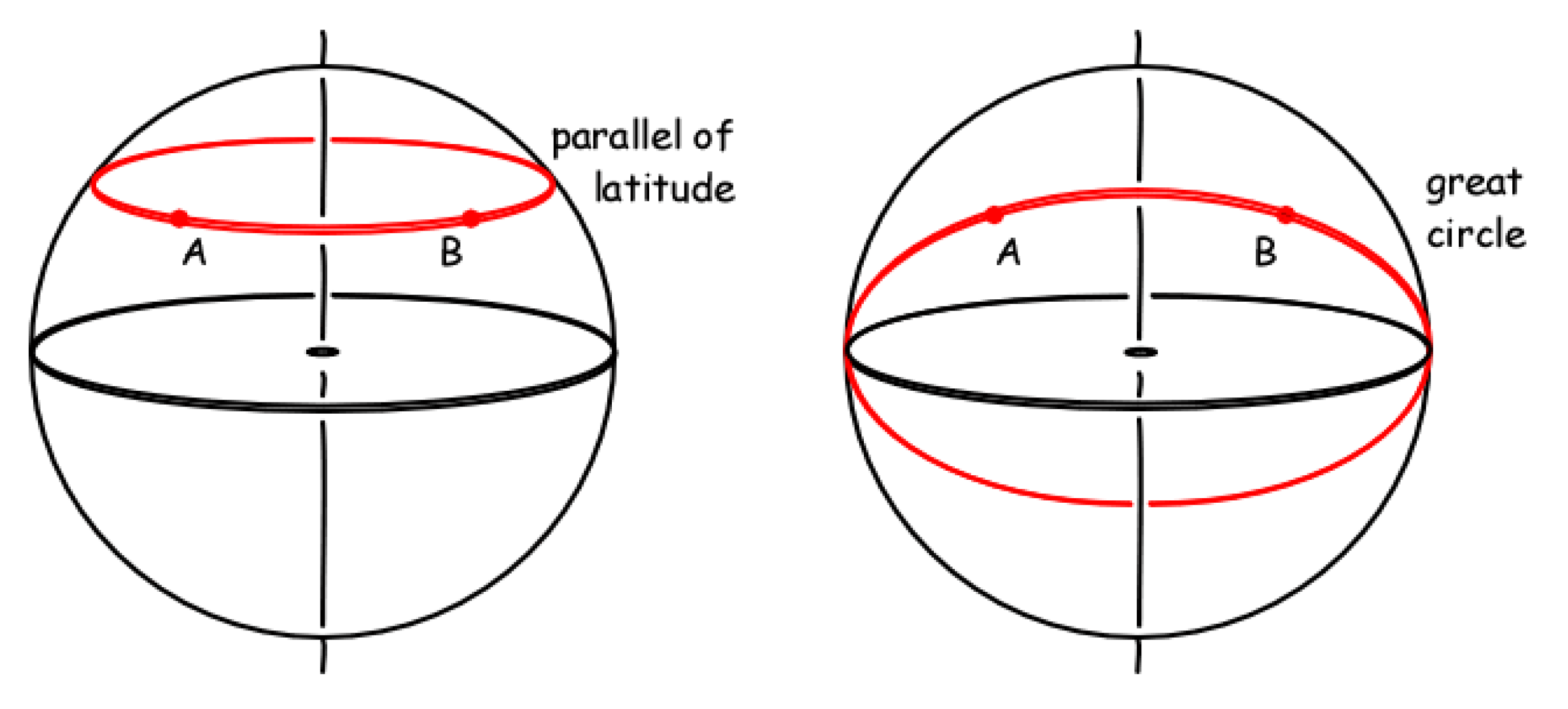
Figure 8.
(c.f., [21]).
Figure 8.
(c.f., [21]).
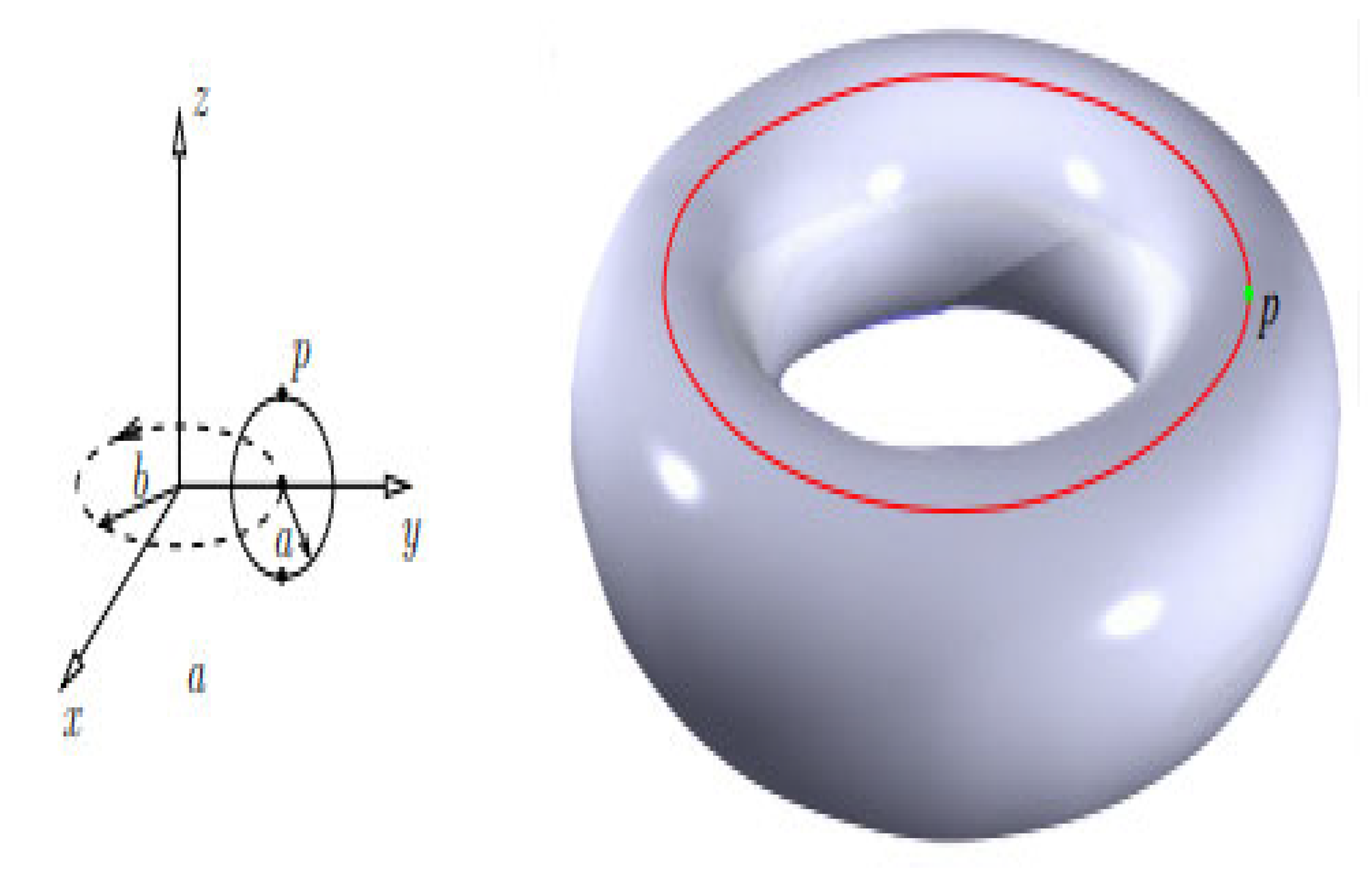
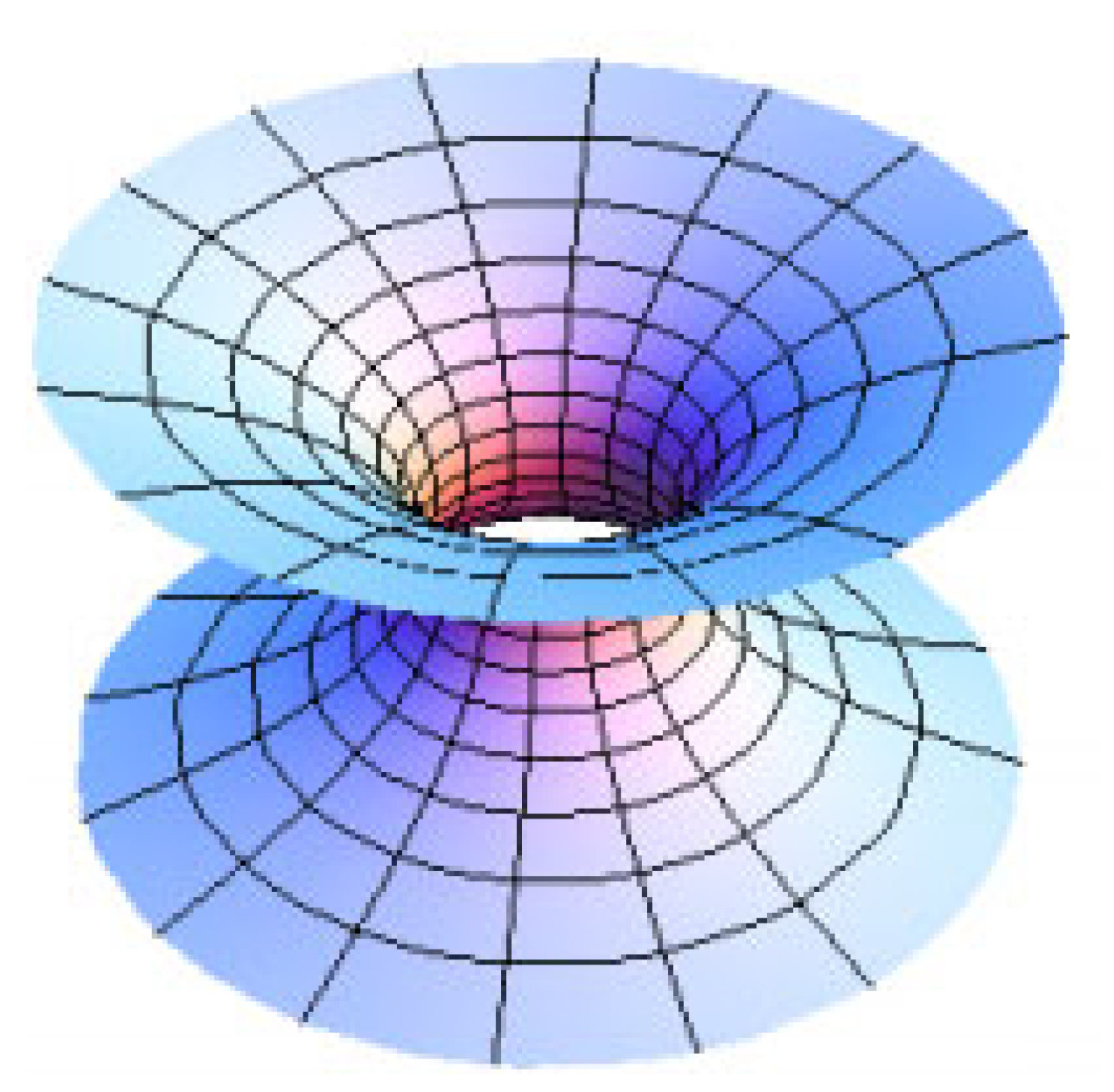
Figure 9.
Catenoid (c.f., [21]).
Figure 9.
Catenoid (c.f., [21]).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



