
Submitted:
02 February 2024
Posted:
02 February 2024
You are already at the latest version
Abstract
The thick functionally graded material (FGM) circular cylindrical shells with advanced varied shear correction coefficient and third-order shear deformation theory (TSDT) under advanced thermal vibration are studied by the method of generalized differential quadrature (GDQ). The coefficient of displacement model of TSDT is applied to derive the equations of motion for the thick FGM circular cylindrical shells. The stiffness in simpler forms of thick FGM circular cylindrical shells and temperature rise in linear expression of the heat conduction equation are used. The differential equations in dynamic equilibrium state of thick FGM circular cylindrical shells can be obtained and rewritten into displacements and shear rotations in partial derivative expressions under dynamic thermal loads in partial derivative expressions. Parametric effect studies including advanced nonlinear varied shear correction coefficient, nonlinear coefficient c1 value, power law index and thermal temperature difference of external heating loads on the displacements and stresses of thick FGM cylindrical shells under thermal dynamic vibration are investigated.
Keywords:
thick FGM
; circular cylindrical shells
; third-order shear deformation theory
; TSDT
; advanced thermal vibration
; GDQ
; nonlinear coefficient
1. Introduction
Usually the shear effect on the displacements and stresses were more considered in the thick thickness materials than in the thin one under every external loads. Some papers of functionally graded materials (FGMs) were investigated usually including the shear effect. Abouelregal et al. [1] in 2023 applied the Laplace transform and decoupling techniques to study the thermal vibration of spinning FGM isotropic piezoelectric rod. The effecting numerical results for non-homogeneous index in the displacement, temperature, electric potential and thermal stress were presented. The thermal stress variation was found in one of the most significant results want to be considered. In 2023, Tang et al. [2] used the radial integral boundary element method (RIBEM) to study the FGM plate under thermal shock loading. The numerical results of displacement, temperature and thermal stress were presented in the thick FGM plate. In 2022, Chen et al. [3] used the Rayleih–Ritz energy method with the first-order shear deformation theory (FSDT) of displacement models to investigate the vibration of FGM stepped cylindrical shell coupled with annular plate under thermal environment. The temperature-dependent constituent materials SUS304 and Si3N4 were used to study the transient responses of displacements. In 2022, Ramteke et al. [4] presented a nonlinear eigen- frequency responses with the higher-order shear deformation theory (HSDT) of displacement models for porous FGM shell panel under thermal environment by using the finite element method (FEM). In 2021, Saeedi et al. [5] applied differential quadrature (DQ) method to study the stresses distributions of thick FGM cylindrical shell with aluminum and silicon carbide under internal pressure and thermal loadings. In 2022, Gee and Hashemi [6] used the dynamic finite element (DFE) method to investigate the numerical results of natural frequencies for the FGM beams. In 2019, Khoshgoftar [7] used the virtual work principle and second-order shear deformation theory (SSDT) of displacement models to obtain the numerical displacement results of axis-symmetric thick FGM shells under non-uniform pressure. In 2019, Trinh and Kim [8] presented the nonlinear stability of moderately thick FGM sandwich shells supported by elastic foundations under thermo-mechanical loadings by using the Bubnov–Galerkin procedure, harmonic balance principle and FSDT of displacement models. The numerical solutions for thermal buckling load are obtained. In 2017, Nejad et al. [9] presented a review for some models used in the solving methods, elasticity theories and shear deformation theories used for the thick FGM cylindrical and conical shells.
Some generalized differential quadrature (GDQ) computational results with nonlinear displacement third-order shear deformation theory (TSDT), thermal temperature of environment and external heating loads were presented for the thermal vibrations of FGMs. Hong [10] in 2023 studied the GDQ solutions of thick FGM plates with the effects of TSDT model but not in function of nonlinear coefficient term of TSDT model. In 2022, Hong [11] presented the dynamic advanced GDQ solutions of thick FGM plates under thermal vibration with the effects of TSDT and advanced shear factor that was in function of term of TSDT model, FGM power law index and environment temperature, but not in function of total thickness. Hong [12] in 2022 presented the GDQ solutions of thick FGM circular cylindrical shells under thermal vibration with the effects of TSDT and varied shear factor that was not in function of term of TSDT model. Hong [13] in 2022 studied the advanced GDQ results of thick FGM plates-cylindrical shells under thermal vibration with the effects of TSDT and advanced shear factor that was in function of term of TSDT model, FGM power law index and environment temperature, but not in function of total thickness of plates-cylindrical shells. The further study now providing the GDQ vibration results of stresses and displacements with the effects of TSDT, advanced varied shear correction coefficient, environment temperature and power law index.
2. Formulation
Two constituent material FGM circular cylindrical shell is studied in Figure 1, in which the parameter of denotes the inner layer thickness of constituent material 1, denotes the outer layer thickness of constituent material 2, L denotes the axial length, and denotes the total thickness. The material properties in power-law function are studied and parameter of denotes Young’s modulus in standard variation form of FGMs, denotes power law index, and denotes Poisson’s ratios of FGMs that is assumed in the simple average form as follows [10],
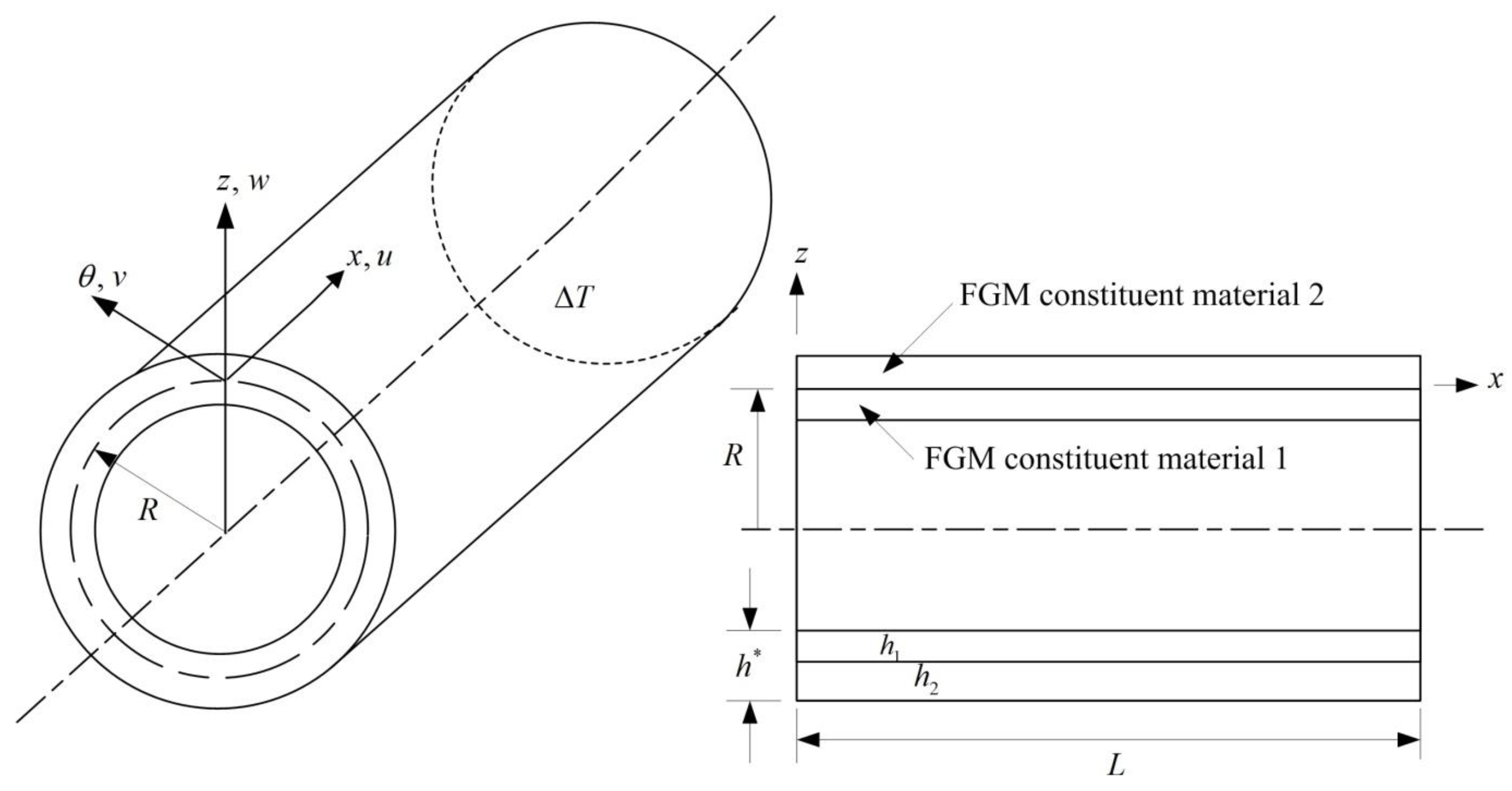 where and are the Young’s modulus, and are the Poisson’s ratios of the constituent material 1 and material 2, respectively in the FGMs.
where and are the Young’s modulus, and are the Poisson’s ratios of the constituent material 1 and material 2, respectively in the FGMs.
Figure 1.
Two constituent material of thick FGM circular cylindrical shells.
The properties of individual constituent material of FGMs, e.g., , , and are in functions of environment temperature T can be calculated by the following form,
in which , , , and are the temperature coefficients.
The time dependent displacement vector of thick FGM circular cylindrical shells are studied in the nonlinear of form with nonlinear coefficient term of TSDT equations [12,14] as follows,
where , , , and , in which denotes the time, u and v denote respectively the tangential displacements in the direction of x and axes. and denote respectively the tangential displacements in the direction of x and axes, w denotes the transverse displacement in the direction of z axis in the middle-plane of FGM shells. and denote the shear rotations. R denotes the radius of middle-surface in FGM shells. The superscript t is operating the transpose of vector.
The stress vector in the thick FGM circular cylindrical shells under external heating loads with temperature difference for the kth constituent layer are studied in the following equations [15],
where , , and
in which and are the normal stresses, and are the shear stresses. and are in-plane strains, and are shear strains can't negligible for thick shells. and are thermal expansion coefficients, is the thermal shear coefficient. with subscripts i, j=1,2,4,5 and 6 are the stiffness of FGM shells.
The advanced varied shear correction coefficient can be used as a coefficient in the following stiffness integral equations , , ,, , and , , ,, , with subscripts =4,5 when and can't negligible in thick shells, also for subscripts =1,2,6 when and are applied.
where simple forms of and are used in the following with z/R term cannot be neglected [16], ,, , and .
And the advanced expression can be derived and expressed in the following equation by using the total strain energy principle to apply [11],
in which , with parameters FGMZS, FGMZSN, FGMZI, FGMZIV1 and FGMZIV2 are in functions of , , and . The calculated values of nonlinear advanced are usually functions of , and T.
The time dependent expression can be studied between the FGM shell and curing area under external heating loads by using the following equation in linear of z,
where temperature parameter , also the simple form heat conduction equation in cylindrical axes is used in the following [10],
in which , denotes the thermal conductivity of FGMs, denotes the density of FGMs, denotes the specific heat of FGMs, they are all assumed in the simple average property form of constituent material 1 and 2, e.g., with is density of FGM constituent material 1 and 2, respectively.
The dynamic equations of motion in the thick FGM cylindrical shells with TSDT are given in the following that can be derived by using the generalized Hamilton total energy principle [13],
where , , subscripts,, , , , , q is external pressure load, , (i= 0, 1, 2,…,6), with denotes the constituent layers total number, denotes the density of superscript k th constituent layer, , in which subscript i=1, 4 and . And assumed strain-displacement relations with , and are used as follows,
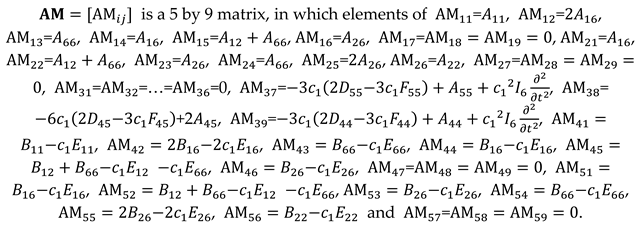
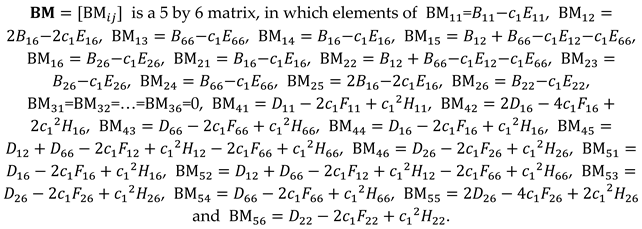
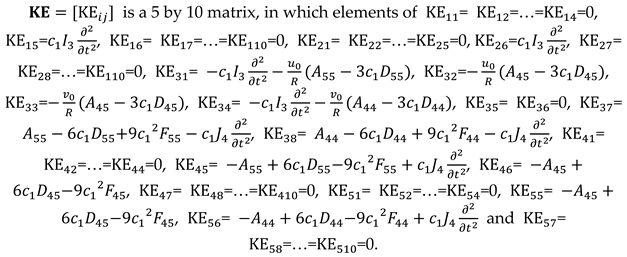
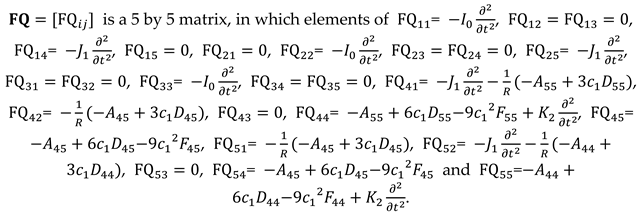
Substitute eqs. (3) and (7) into eq. (6), the dynamic equilibrium differential equations in the cylindrical coordinates of thick FGM circular cylindrical shells in terms of partial derivatives of with TSDT under partial derivatives of external loads can be written in matrix forms as follows [13].
where is a 5 by 5 matrix, is a 5 by 12 matrix, is a 5 by 8 matrix, is a 5 by 9 matrix, is a 5 by 6 matrix, is a 5 by 10 matrix, is a 5 by 5 matrix, for more details of these matrices are expressed in the section Appendix A.
with
in which and are external in-plane distributed forces in x and direction respectively.
By using the GDQ numerical method to solve the equation (8) for the thick FGM circular cylindrical shells under time sinusoidal vibrations of displacement, shear rotations and thermal temperature difference of external heating loads only, i.e., are studied as follows,
where denotes the natural frequency with subscripts m, n denote the mode shape numbers of FGMs, denotes the applied heat flux frequency, denotes the temperature amplitude.
For more detail procedures used in GDQ numerical method can be referred [10], the GDQ dynamic discrete equations could be obtained and expressed into the matrix equation as follows for a interior grid point at subscripts (i, j) in the computation,
in which denotes the coefficient matrix with dimension of by () contains (, , ,, , and , , ,, , ) and weighting parameters () for the superscript m th-order derivative of the functions, e.g., , , , , , , , , , , , , and with respect to the x and directions.
is a th-order unknown column vector, in which non-dimensional parameters , and are used for column vector and is a th-order row external loads vector, in which
Thus the unknown column vector can be solved and obtained by computer programs. Also the inter-laminar stress in the k th constituent layer could be obtained.
3. Some numerical results
The and coordinates for grid N and M in the computation of thick FGM circular cylindrical shells are applied as follows to obtain the thermal vibration GDQ results of advanced with shells constituent layers in () under four sides simply supported boundary condition.
The calculated values of frequency γ of applied heat flux for the thermal loads can be obtained in the heat conduction equation and referred to [12] for more details. Also the calculated values of vibration frequency under free vibration () can be obtained in the simply homogeneous equation and referred to [17] for more details.
The FGM constituent material 1 is SUS304 and constituent material 2 is Si3N4 that are applied for the GDQ numerical computations including the effect of advanced varied . The dynamic convergence study of center displacement (mm) in thick FGM circular cylindrical shells is obtained firstly. Secondly, the amplitude of for the thick FGM circular cylindrical shells is calculated. Also the normal stress (GPa) and shear stress (GPa) are computed. Finally, the transient responses of are presented for the thick FGM circular cylindrical shells in the following paragraphs.
3.1. Advanced dynamic convergence study
The advanced dynamic convergence study of in the thermal vibration of nonlinear TSDT of = 0.925925/mm2 and linear of = 0/mm2 for thick FGMs = 10 with = 0.2618004/s and = 5 with = 0.2618019/s, respectively at t= 6s,, = 1.2mm, = 0.6mm, T= 100K, = 100K are presented in Table 1. The convergence values of are calculated with the advanced nonlinear and for three values of . In the nonlinear = 5 case of = 0.925925/mm2: (a) for value of = 0.5, = -0.539419 and = 0.001731/s are obtained. (b) for value of = 1, = -0.922719 and = 0.001733/s are obtained. (c) for value of = 2, = 9.852628 and = 0.001735/s are obtained. In the linear = 5 case of = 0/mm2: (a) for value of = 0.5, = 1.136032 and = 0.002972/s are obtained. (b) for value of = 1, = 1.273499 and = 0.003009/s are obtained. (c) for value of = 2, = 1.317037 and = 0.002994/s are obtained. The error accuracy is 4.4e-06 for the nonlinear amplitude of = 0.5 and = 10. The grid points with = 13×13 are in the very good convergence result for displacement and stress in the advanced thermal vibration of thick FGMs with advanced nonlinear .

Table 1.
Advanced convergence of FGM cylindrical shells with nonlinear varied .
| (1/mm2) | GDQ method | (mm) at t= 6s | ||||
| = 0.5 | = 1 | = 2 | ||||
| 0.925925 | 10 | 7 × 7 | 1.128855 | 1.110114 | 0.460406 | |
| 9 × 9 | 1.130210 | 1.129728 | 0.460169 | |||
| 11 × 11 | 1.130201 | 1.129750 | 0.460173 | |||
| 13 × 13 | 1.130206 | 1.129744 | 0.460175 | |||
| 5 | 7 × 7 | 0.085678 | 0.085501 | 0.097189 | ||
| 9 × 9 | 0.085690 | 0.085513 | 0.097174 | |||
| 11 × 11 | 0.085691 | 0.085513 | 0.097172 | |||
| 13 × 13 | 0.085690 | 0.085513 | 0.097164 | |||
| 0 | 10 | 7 × 7 | 20.11788 | 19.25051 | 19.22559 | |
| 9 × 9 | 3.074959 | 3.096322 | 3.096179 | |||
| 11 × 11 | 3.043667 | 3.072545 | 3.036793 | |||
| 13 × 13 | 3.076776 | 3.077761 | 3.082854 | |||
| 5 | 7 × 7 | 0.309435 | 0.309401 | 0.312130 | ||
| 9 × 9 | 0.209839 | 0.289099 | 0.290058 | |||
| 11 × 11 | 0.294196 | 0.288990 | 0.289848 | |||
| 13 × 13 | 0.294207 | 0.289000 | 0.289840 | |||
3.2. Advanced time responses
The time responses of advanced are obtained with the advanced nonlinear values. The values are decreasing from =15.707960/s at t =0.1s to =0.523601/s at t =3.0s applied for = 5, and from =15.707963/s at t =0.1s to =0.523599/s at t =3.0s applied for = 10. The response of values versus time t(s) are shown in Figure 2 for nonlinear TSDT case with values = 0.925925/mm2, = -3.535402 and for linear case with values = 0/mm2, = 1.200860 in thick FGMs = 5 and 10, respectively, , T=600K, =100K for t =0.1s-3.0s. The maximum value of is 19.201795mm occurs at t = 0.1s for thick = 5 with = 0/mm2 and = 15.707964/s. The maximum value of is 224.052338mm at t = 0.1s for = 10, = 0/mm2 and = 15.707963/s. The values have the oscillating and decreasing tendencies in the case = 0.925925/mm2, amplitudes are decreasing with time in the case = 0/mm2 except at t= 2.6s for = 5. The values have the converging and decreasing tendencies in the = 0.925925/mm2 and = 0/mm2 for = 10. The values in = 0/mm2 are overestimated and greater than that in = 0.925925/mm2 at the corresponding time for the = 10.
Figure 2.
Advanced (mm) versus t(s): (a) = 5, (b) =10.
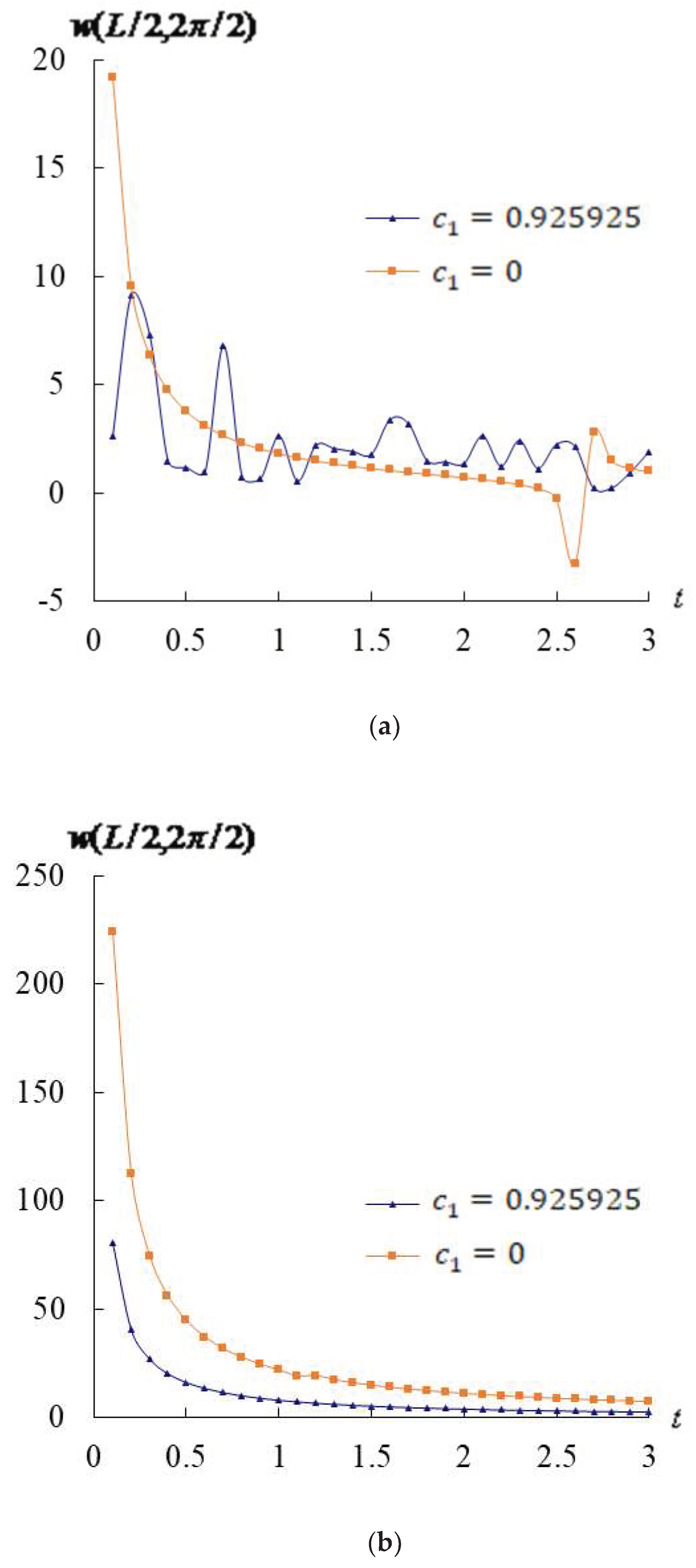
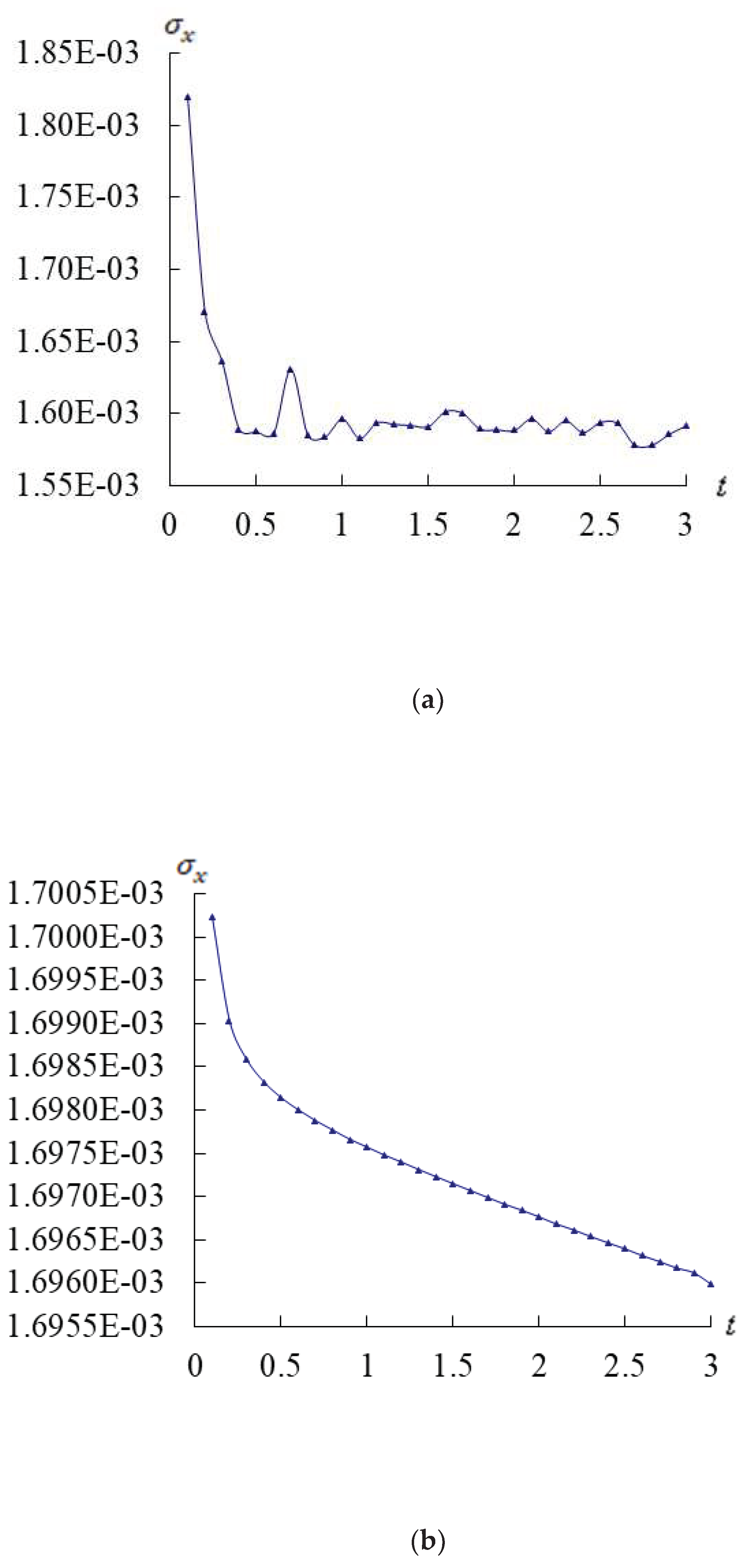
Figure 3 show the time responses of the dominated stress at center position of inner surface z = -0.5 for = 1, =5 and 10, = 0.925925/mm2. The maximum value is 1.8199E-03GPa occurs at t = 0.1s in the periods t =0.1s-3s for = 5. The values have the oscillating and decreasing tendencies in = 0.925925/mm2 for = 5. The values have the decreasing tendency in = 0.925925/mm2 for = 10.
Figure 3.
Advanced (GPa) versus t(s) (a)= 5, (b) .
3.3. Effects of T and on the advanced responses
Figure 4 shows the advanced response of vs. T (100K, 600K and 1000K) and at t = 0.1s in FGMs under =100K, = 0.925925/mm2 for = 5 and 10. Figure 4a shows the values of vs. T and for the = 5 case, the maximum value is 9.064334mm in T=1000K for = 0.1. The value have the increasing tendency vs. T, the of the =5 cannot withstand for higher T=1000K. Figure 4b shows the values of vs. T and for the = 10 case, they are almost located in the same curves except for = 2. The maximum value is 120.82637mm in T=1000K. The value have the increasing tendency vs. T, the of the = 10 also cannot withstand for higher T=1000K at t = 0.1s.
Figure 4.
Advanced (mm) versus T(K) with from 0.1 to 10: (a)= 5, (b) = 10.
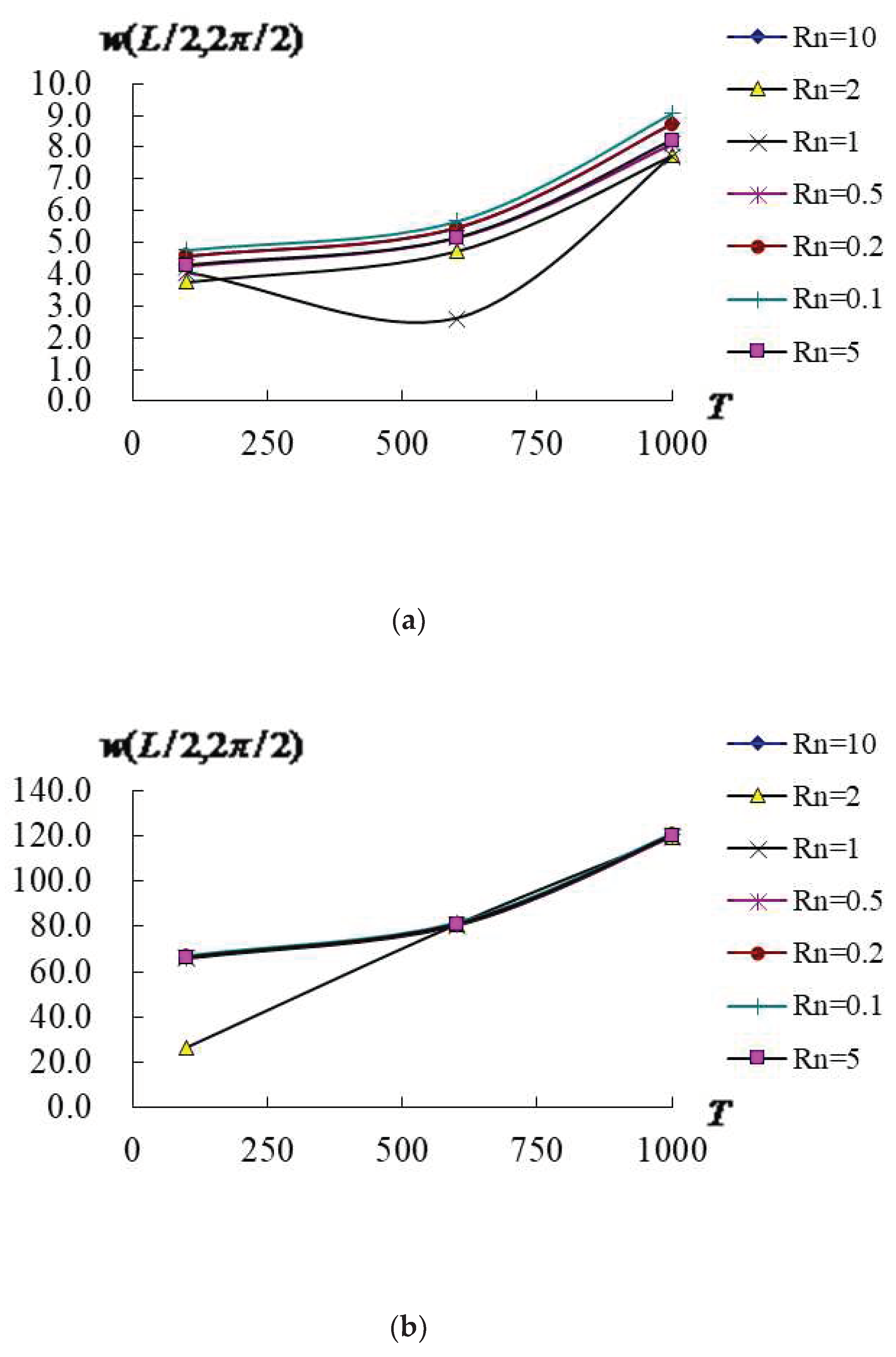
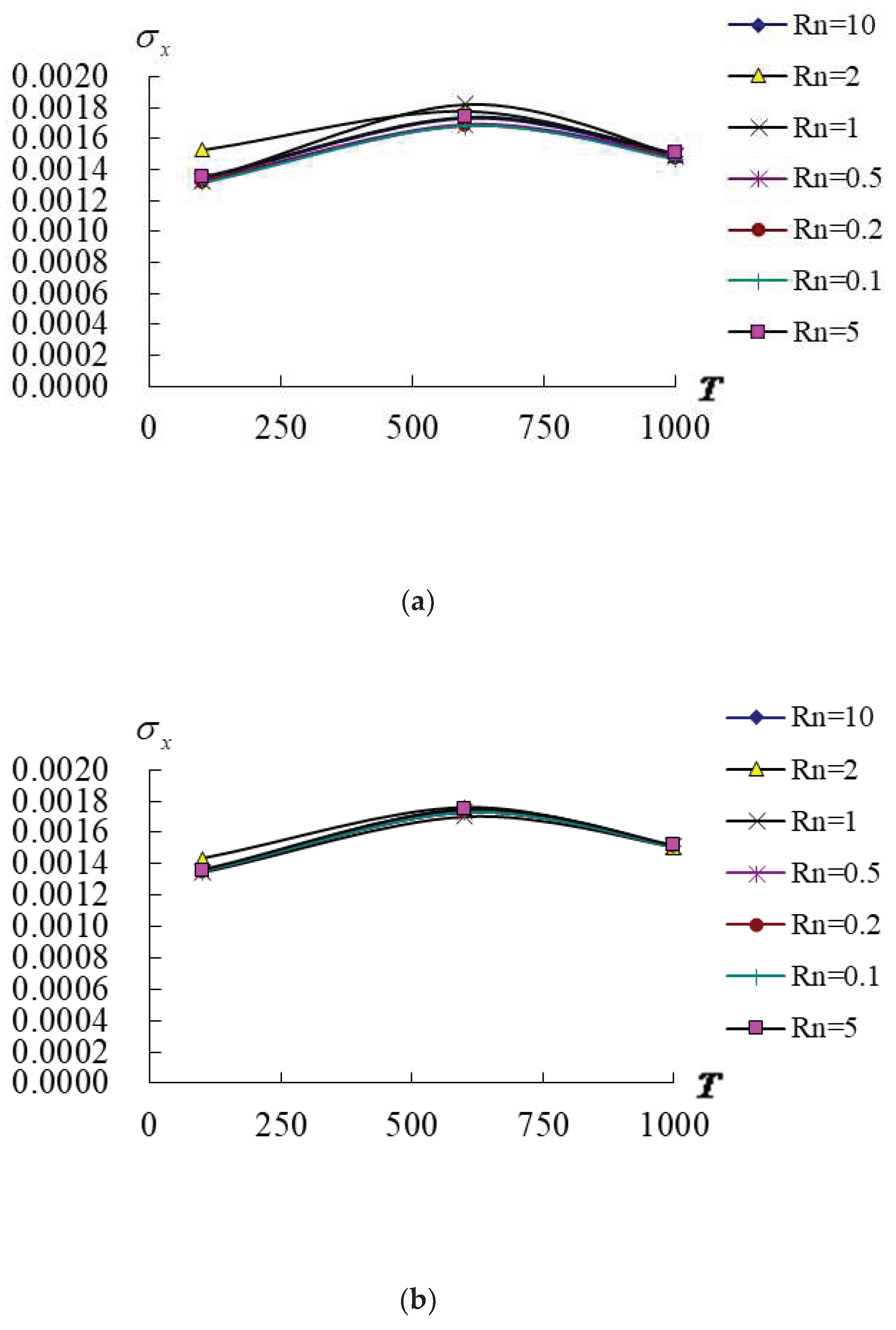
Figure 5 shows the advanced normal stress at = -0.5 vs. T and at t = 0.1s in FGMs under =100K, = 0.925925/mm2 for thick = 5 and 10. Figure 5a shows the values vs. T and for the = 5 case, the value have the increasing tendency from T=100K to T=600K and then decreasing tendency from T=600K to T=1000K. The maximum value is 0.001819GPa in T=600K for = 1. The of the = 5 can withstand for higher T=1000K. Figure 5b shows the values of vs. T and for the = 10 case, they are almost located in the same curves for all value of , the value vs. T have the increasing tendency from T=100K to T=600K and then all decreasing tendency from T=600K to T=1000K. The maximum value is 0.001761GPa in T=600K. The dominated stress of the = 10 also can withstand for higher T=1000K.
Figure 5.
Advanced (GPa) versus T (K): (a) = 5, (b) = 10.
3.4. Advanced transient responses
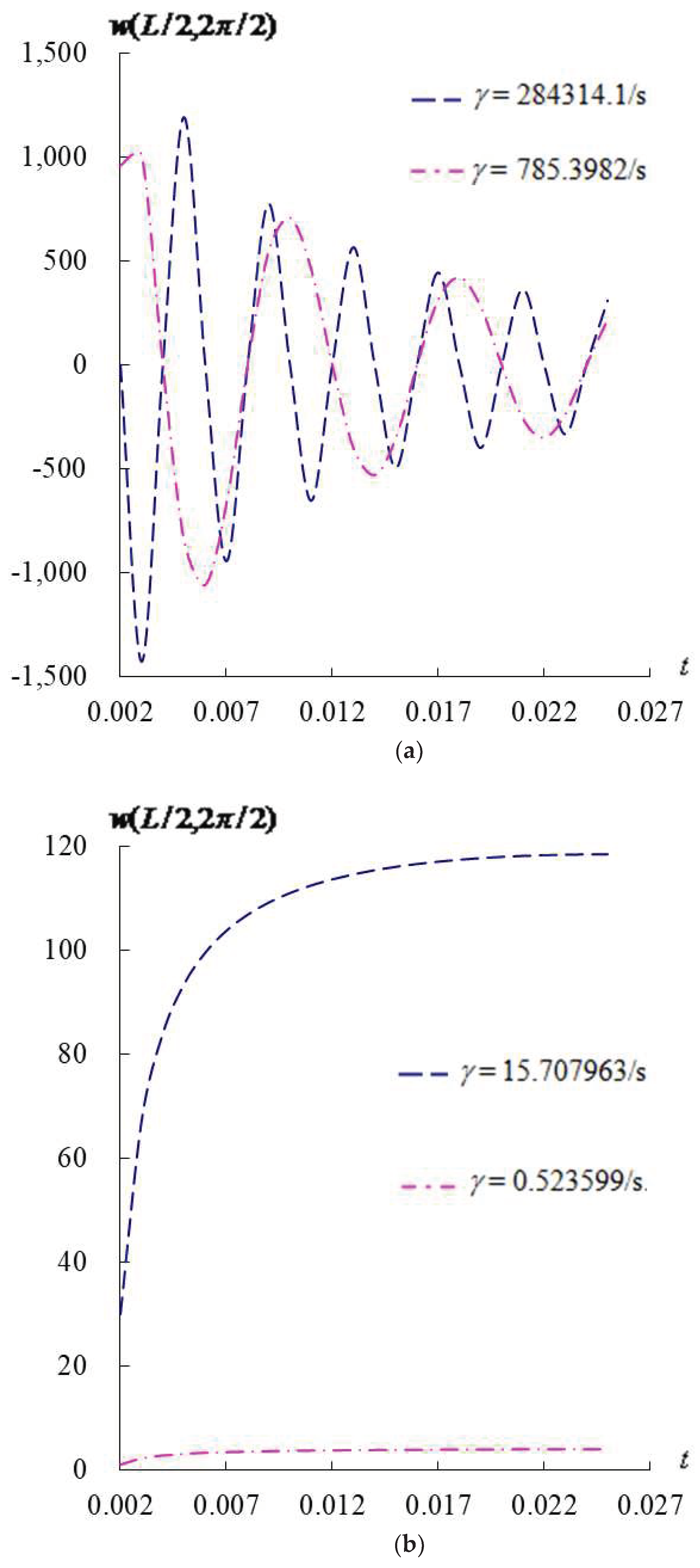
The advanced transient responses of are presented with = 0.925925/mm2 for = 10 and fixed = 0.000592/s as shown in Figure 6. Also used the fixed values of applied heat flux, , = 1.2mm, = 0.6mm, , advanced varied values of = -3.535402, T=600K, =100K for period t = 0.002s-0.025s and time step 0.001s is used. Figure 6a shows the compared transient response of for = 10 with super value = 284314.1/s and high value = 785.3982/s. The transient values of vs. higher are all oscillating and decreasing for = 10. Figure 6b shows the compared transient response of for = 10 with lower values = 15.707963/s and = 0.523599/s. The transient values of vs. lower are all rapid converging for = 10.
Figure 6.
Advanced transient (mm) vs. t(s) for = 10: (a) = 284314.1/s and 785.3982/s, (b) = 15.707963/s and 0.523599/s.
Figure 6.
Advanced transient (mm) vs. t(s) for = 10: (a) = 284314.1/s and 785.3982/s, (b) = 15.707963/s and 0.523599/s.
4. Conclusions
The advanced displacements and stresses of numerical GDQ results are presented for the thick FGM circular cylindrical shells. The most important parameter effects of nonlinear shear coefficient is considered. The second important parameter effects of coefficient in TSDT is also considered. The advanced values in = 0/mm2 are overestimated and greater than that in = 0.925925/mm2 at the corresponding time for the = 10. The advanced values of the =5 and 10 can't withstand in higher T=1000K. The advanced values of the = 5 and 10 can withstand in higher T=1000K of environment for thick FGMs at t = 0.1s. The advanced transient values of vs. lower frequency of applied heat flux are all rapid converging.
Author Contributions
For research articles with only one author.
Funding
There is no funder for this study.
Data Availability Statement
In the manuscript completely mentioned the data used to generate the figures and tables. Data are all available on request. Declare all the data are generated by the author, also data are openly available.
Acknowledgments
The author expresses his thanks to the people helping with this work, and acknowledge the valuable suggestions from the peer reviewers.
Conflicts of Interest
The authors declare that they have no conflict of interest.
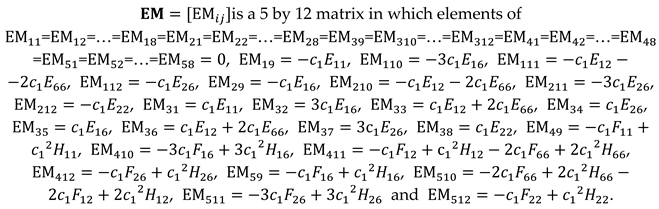
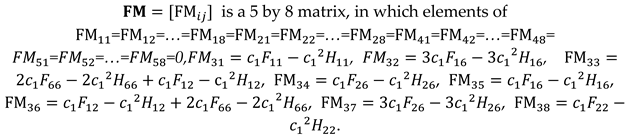
Appendix A
The elements of , , , , , and are expressed as follows,

References
- Abouelregal, A.E.; Marin, M.; Abusalim, S.M. An investigation into thermal vibrations caused by a moving heat supply on a spinning functionally graded isotropic piezoelectric bounded rod. Mathematics 2023, 11, 1739, 1–17. [CrossRef]
- Tang, Z.; Hu, J.; Li, Z. A fast reduced-order model for radial integration boundary element method based on proper orthogonal decomposition in the non-uniform coupled thermoelastic problems. Mathematics 2023, 11, 3870, 1–29. [CrossRef]
- Chen, Z.; Wang, A.; Qin, B.; Wang, Q.; Zhong, R. Investigation on vibration of the functionally graded material–stepped cylindrical shell coupled with annular plate in thermal environment. Journal of Low Frequency Noise, Vibr. and Acti. Cont. 2022, 41(1), 85–111. [CrossRef]
- Ramteke, P.M.; Kumar, V.; Sharma, N.; Panda, S.K. Geometrical nonlinear numerical frequency prediction of porous functionally graded shell panel under thermal environment. Int. J. of Non-Line. Mech. 2022, 143, 104041, 1–14. [CrossRef]
- Saeedi, S.; Kholdi, M.; Loghman, A.; Ashrafi, H.; Aref, M. Thermo-elasto-plastic analysis of thick-walled cylinder made of functionally graded materials using successive approximation method. Int. J. of Pres. Vess. and Pipi. 2021, 194, 104481, 1–12. [CrossRef]
- Gee, A.; Hashemi, S.M. Undamped Free Vibration Analysis of Functionally Graded Beams: A Dynamic Finite Element Approach, Appl. Mech. 2022, 3(4), 1223–1239. 4. [CrossRef]
- Khoshgoftar, M.J. Second order shear deformation theory for functionally graded axisymmetric thick shell with variable thickness under non-uniform pressure. Thin-Wall. Struct. 2019, 144, 106286, 1–7. [CrossRef]
- Trinh, M.C.; Kim, S.E. Nonlinear stability of moderately thick functionally graded sandwich shells with double curvature in thermal environment. Aero. Sci. and Tech. 2019, 84, 672–685. [CrossRef]
- Nejad, M.Z.; Jabbari, M.; Hadi, A. A review of functionally graded thick cylindrical and conical shells. JCAMECH 2017, 48, issue 2, 357–370. [CrossRef]
- Hong, C.C. GDQ computation for thermal vibration of thick FGM plates by using third-order shear deformation theory. Mater. Sci. and Eng. B 2023, 294, 116208, 1–22. [CrossRef]
- Hong, C.C. Advanced dynamic thermal vibration of laminated FGM plates with simply homogeneous equation by using TSDT and nonlinear varied shear coefficient. Appl. Sci. 2022, 12, 11776, 1–14. [CrossRef]
- Hong, C.C. Thermal vibration of thick FGM circular cylindrical shells by using TSDT. Mater. Plus 2022, 1, issue 1, 1–10. [CrossRef]
- Hong, C.C. Advanced dynamic thermal vibration of thick FGM plates-cylindrical shells. Ocean Eng. 2022, 266, 112701, 1–16. [CrossRef]
- Lee, S.J.; Reddy, J.N.; Rostam-Abadi, F. Transient analysis of laminated composite plates with embedded smart-material layers. Fin. Elem. in Anal. and Des. 2004, 40, 463–483. [CrossRef]
- Whitney, J.M. Structural analysis of laminated anisotropic plates. Lancaster: Pennsylvania, USA, Technomic Publishing Company, Inc. 1987. [CrossRef]
- Hong, C.C. Thermal vibration of magnetostrictive functionally graded material shells by considering the varied effects of shear correction coefficient. Int. J. of Mech. Sci. 2014, 85, 20–29. [CrossRef]
- Hong, C.C. Advanced frequency study of thick FGM cylindrical shells by using TSDT and nonlinear shear. Mat. Plus 2023, 2, issue 2, 1–11. [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



