
Submitted:
19 February 2024
Posted:
19 February 2024
You are already at the latest version
Abstract
This conceptual paper explores the potential of integrating Electromagnetic Fields (EMF) with traditional physiological signals to enhance emotional contagion in Human-Robot Interaction (HRI). A focused literature review identifies gaps in current HRI models that rely solely on visual, auditory, and known physiological cues for emotional exchange. A novel framework is proposed, incorporating EMF as a complementary modality, aiming to deepen emotional synchronization between humans and robots. The paper lays groundwork for future research to consider EMF detection as a complementary modality alongside traditional cues. It also addresses technological requirements and discusses potential limitations. By extending the modalities used in emotional contagion, this work seeks to advance the development of more intuitive and empathetic robotic systems.
Keywords:
Emotional Contagion
; Human-Robot Interaction
; Electromagnetic Fields
1. Introduction
In the realm of Human-Robot Interaction (HRI), the nuanced dynamics of emotional exchange between humans and robots represent a frontier of interdisciplinary research, merging insights from psychology, neuroscience, and robotics. Central to this exploration is the concept of emotional contagion, a phenomenon where emotions are subconsciously shared and synchronized between individuals through non-verbal cues, such as facial expressions, vocal tones, and postures. Originally studied within the context of human interactions, where it plays a pivotal role in fostering empathy and social cohesion, emotional contagion’s implications for HRI are profound [9,26,33]. It underlines the potential for robots not merely as tools or functional aids but as entities capable of engaging in emotionally rich interactions with humans.
As robots increasingly infiltrate everyday life, serving diverse roles from companionship to service provision, the ability to understand, mimic, and respond to human emotions becomes paramount. This shift necessitates a deeper investigation into how emotional contagion mechanisms can be adapted and integrated into robotic systems to enhance interaction quality and user experience. There are ongoing studies that highlight the burgeoning interest in making robots more emotionally attuned to humans, suggesting that design elements such as anthropomorphism and expressiveness significantly influence emotional transmission and perception in HRI [12,32,33].
Building upon this foundation, the hypothesis that emotions can manifest as Electromagnetic Fields (EMFs) introduces an innovative perspective on the physicality of emotions. This notion, supported by research on brain-to-brain communication facilitated by EMFs opens up new avenues for detecting and interpreting emotions in HRI [11]. By considering emotions as detectable EMF patterns generated by neural activities, as detailed in, we posit a novel modality for emotion recognition in robots [4,11,34,35]. This approach not only challenges traditional understandings of emotional contagion but also presents a unique opportunity to enhance robotic sensitivity to human emotional states through EMF detection.
Paper Overview: This paper embarks on an interdisciplinary journey to explore the integration of EMF detection as a novel modality in HRI, aiming to enrich the emotional bandwidth of human-robot exchanges. Starting with an in-depth discussion on the role of emotional contagion in HRI, we delve into the potential of robots to both influence and reflect human emotions, thus fostering a more intuitive and empathetic interaction framework. We then introduce the concept of emotions as EMFs, reviewing existing methodologies for non-invasively measuring brain EMF activity and their implications for emotion recognition in robotics. By proposing a conceptual framework for the incorporation of EMF detection in robotic systems, this paper aims to pave the way for the development of more emotionally intelligent robots, capable of engaging in meaningful emotional exchanges with humans. Through this exploration, we seek not only to advance the technological capabilities of robots but also to deepen our understanding of the complex interplay between emotions and technology.
2. Literature review
2.1. Theoretical Foundations
2.1.1. Emotional Contagion in Human-Robot Interaction (HRI)
Emotional contagion, the subconscious and involuntary process of catching or sharing another person’s emotions through non-verbal cues such as facial expressions, vocal expressions, and postures, plays a fundamental role in human interactions and relationships. This phenomenon not only facilitates behavioral synchrony but also enables the moment-to-moment tracking of others’ emotional states without deliberate attention. The underlying mechanisms, as proposed by Hatfield et al., include mimicry of observable emotional cues leading to a shared emotional experience [9]. This basic form of emotional connectivity underscores the importance of emotional contagion in establishing and maintaining social bonds and empathy within personal relationships.
Extending the concept of emotional contagion into the realm of Human-Robot Interaction (HRI) offers intriguing possibilities for enhancing robot empathy and improving interaction quality. Emotional contagion’s effectiveness in communication and its role in facilitating synchrony in human interactions suggests its potential as a strategy for developing robots that can better understand and respond to human emotional states [9]. Such capabilities could transform HRI by making interactions more intuitive, engaging, and emotionally resonant, especially in contexts requiring emotional sensitivity and adaptability.
The evolution of Human-Robot Interaction (HRI) has progressively emphasized the emotional dimensions of interactions, moving beyond functional and task-oriented engagements to incorporate emotional intelligence and empathy. This shift acknowledges the growing role of robots not just as tools or aids but as companions and service providers in daily life, where emotional contagion emerges as a significant factor influencing user experience [31]. Such advancements underline the necessity for robots to perceive and respond to human emotions accurately, thereby facilitating a more nuanced and empathetic interaction.
Recent investigations into HRI emphasize the importance of emotional contagion in enhancing interaction quality. Studies have shown that robots capable of displaying and responding to emotional cues can significantly affect users’ emotional states. For instance, the act of mimicking human emotional expressions by robots has been demonstrated to elicit similar emotional responses from users, underscoring the potential of robots to participate in emotional contagion processes [10]. Moreover, leveraging advanced group emotion detection methodologies, such as the application of Visual Geometry Group (VGG) neural network-based feature extraction, highlights the potential for social robots to accurately interpret and respond to collective emotional states, thereby enriching the emotional contagion dynamics in HRI and further bridging the empathy gap between humans and robots [21]. This capacity for emotional transmission is not only central to creating more empathetic and responsive robotic systems but also crucial in expanding the robots’ roles in various social and professional settings.
The challenge and opportunity lie in identifying and integrating the subtle cues of emotional contagion into robotic systems. As research progresses, understanding the diverse mechanisms and impacts of emotional contagion will be critical in designing robots capable of genuine emotional engagement with humans [31,33]. This endeavor not only broadens the scope of HRI but also contributes to our understanding of emotional dynamics in human-technology interactions.
2.1.2. Current Methodologies for Emotional Contagion in HRI
Recent developments in HRI have highlighted the importance of emotional contagion, where robots can "catch" or mimic human emotions, enhancing the empathetic bridge between humans and machines. This capability is pivotal in service scenarios, healthcare, and companionship roles, where the emotional state of the human user significantly impacts the interaction outcome.
The exploration of anthropomorphism and gender differences in robot design further enriches this domain, revealing that such attributes can significantly influence emotional contagion in HRI [31]. Robots that exhibit human-like qualities or those whose appearances are carefully designed to evoke specific emotional responses tend to be more successful in creating an emotional rapport with users. Such findings underscore the nuanced interplay between robot design and emotional contagion, suggesting that the visual and behavioral characteristics of robots can significantly enhance or hinder the process of emotional transmission [33].
Moreover, the integration of sensory technologies that capture human physiological signals has opened new avenues for developing emotionally intelligent robots [5,17]. A systematic review by Destyanto et al. (2023) highlights the significant strides made in leveraging physiological data and wearable devices for emotion recognition [7]. This comprehensive analysis underscores the diverse array of physiological signals, such as brain activity, heart rate, and skin conductivity, employed in contemporary research, alongside innovative experimental methods, and classification algorithms. Also, a multimodal approach in which, by perceiving human emotions through physiological signals, such as heart rate or skin conductivity, robots can adapt their behaviors and responses in real-time, aligning with the user’s emotional state [17,26]. Table 1 presents a consolidated view of the multimodal methodologies utilized in HRI research to analyze and facilitate emotional contagion, categorizing distinct approaches such as visual and auditory cues, tactile feedback, and complex physiological and neurological signals. This approach not only improves interaction quality but also contributes to the broader goal of creating robots capable of supporting and enhancing human emotional well-being.

Table 1.
Existing Modalities in the Multimodal Approach for Emotional Contagion In HRI
| Modality | Description |
|---|---|
| Visual Cues | Face Expression Recognition & Mimicry, Behavioral Reactions |
| Auditory Cues | Voice Emotion Recognition |
| Tactile Feedback | Touch and Gesture-Based Interaction |
| Physiological Signals | Physiological Reactions: Autonomic Nervous System Activation (Heart rate, Respiration Rate, skin conductance), hormonal changes, and neural representations of arousal |
| Neurological Reactions: Activation of Mirror Neuron System, Frontal EEG Asymmetry, Neuroimaging (fMRI, fNIRS, EEG) |
In this context, HRI research is expanding to include systems that autonomously determine and transition to the most suitable emotional state based on human interactions. Such systems employ complex models like Hidden Markov Models (HMM) to predict emotional transitions, enabling robots to mirror human emotions more effectively and engage in emotionally resonant interactions [15]. This progression towards emotionally responsive robots represents a significant leap in HRI, promising a future where robots can genuinely understand and empathize with human emotions, thus revolutionizing how we interact with machines.
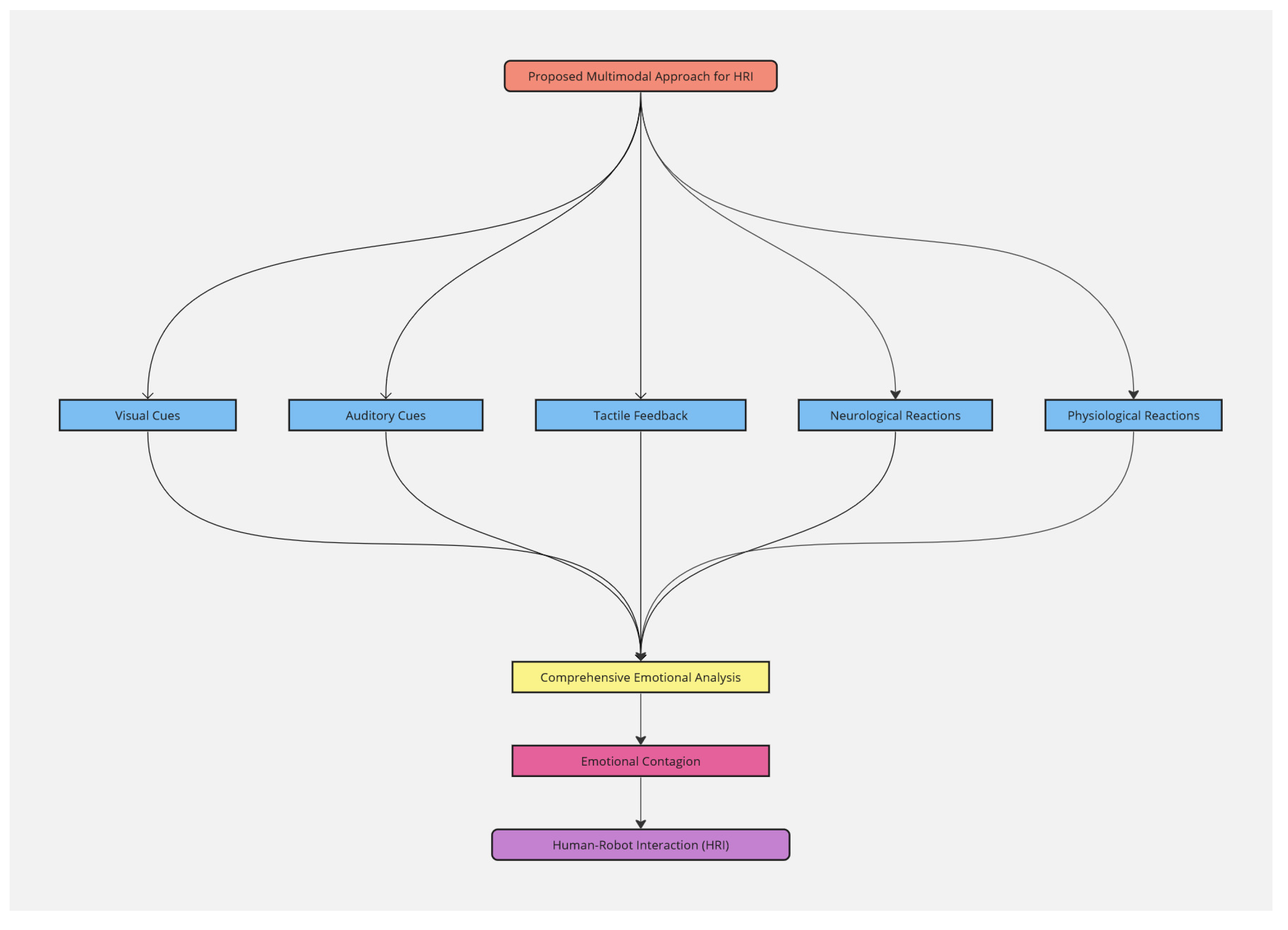
Figure 1.
Current Methodology for Emotional Contagion in HRI
2.1.3. Emotions as Electromagnetic Fields (EMFs)
The exploration of emotions as electromagnetic fields (EMFs) presents a novel dimension in the understanding of emotional contagion and its implications for human-robot interaction (HRI). Groundbreaking research suggests that direct brain-to-brain communication, transcending traditional sensory modalities, can occur through the electromagnetic fields generated by brain activity. This phenomenon underlines a potential physical basis for emotions, where the magnetic fields resulting from neural action potentials could serve as carriers of emotional states between individuals [11].
Recent studies have validated the concept of brain-to-brain communication, demonstrating the transmission of action potentials and, by extension, emotions and intentions, between separate brains. This communication is facilitated by the brain’s inherent ability to perceive and interpret magnetic fields, a capability attributed to the presence of cryptochrome proteins and iron particles (Fe3O4) within the brain. These components are hypothesized to act as magnetic field receptors, converting electromagnetic signals into neural action potentials [11].
This paradigm shift towards viewing emotions as EMFs opens up unprecedented avenues for HRI, where robots could potentially ’feel’ and ’transmit’ emotions through electromagnetic signals. The integration of EMF detection mechanisms in robots, based on the principles of brain electromagnetic activity and its reception, could revolutionize the way robots understand and interact with human emotions. By tapping into the electromagnetic aspect of emotions, robots could achieve a deeper, more intuitive connection with humans, enhancing the empathetic quality of HRI.
The implications of such a breakthrough extend beyond technical enhancements in robotics to fundamental questions about the nature of emotions and consciousness. As research continues to uncover the mechanisms through which electromagnetic fields influence neural activity and emotional transmission, the potential for developing emotionally intelligent robots becomes increasingly tangible. This exploration not only challenges our current understanding of emotions but also paves the way for innovative approaches in the design and function of robotic systems [12].
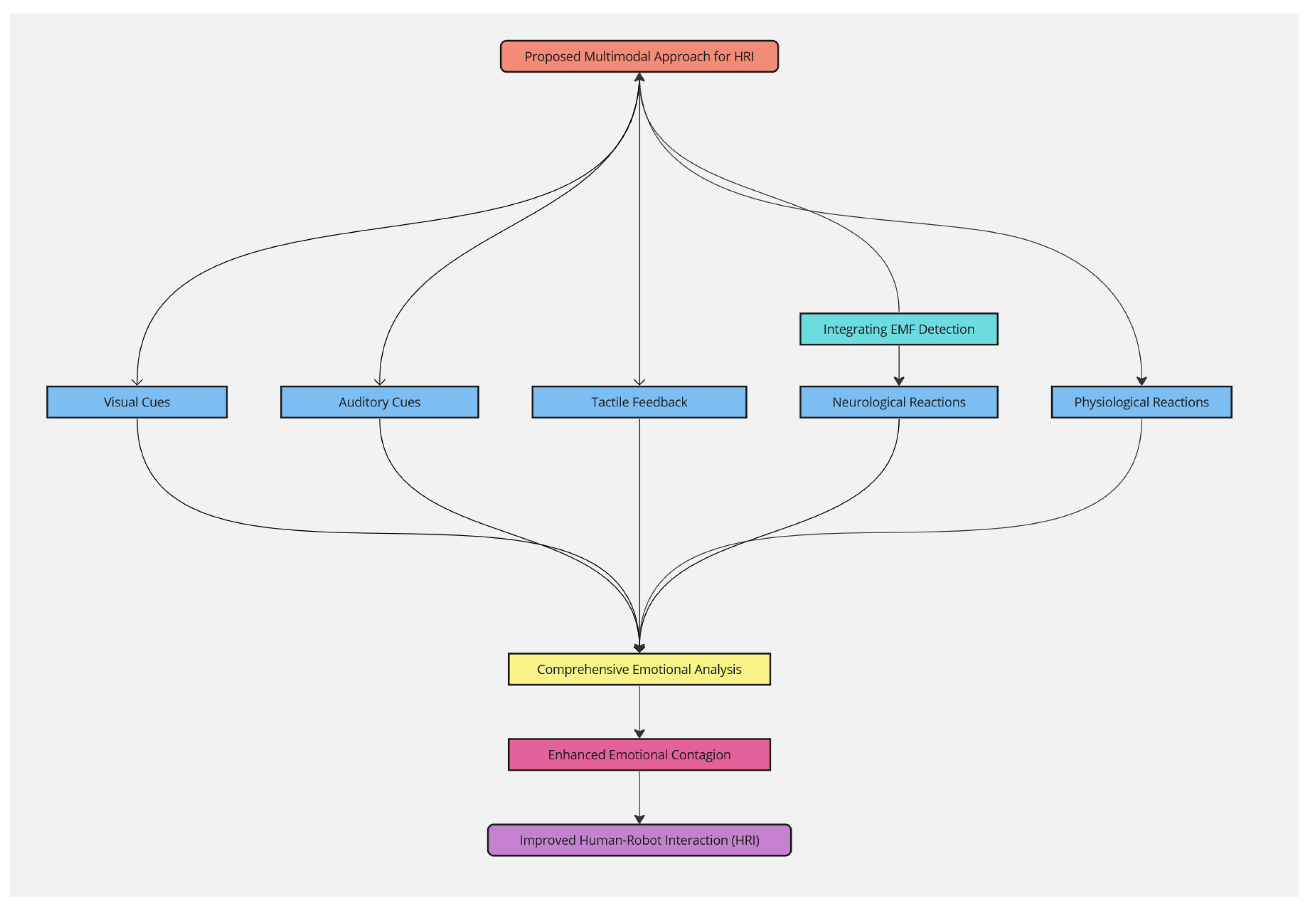
Figure 2.
Proposed Methodology for Emotional Contagion in HRI
2.1.4. Introducing EMFs as a new modality
The advent of leveraging Electromagnetic Fields (EMFs) as a novel modality in HRI represents a paradigm shift towards a more nuanced understanding of emotional transmission and perception. Studies have highlighted the significant, yet complex, effects of EMFs on biological systems, including direct tissue penetration and the induction of both thermal and non-thermal effects in body cells, tissues, and organs. These interactions underline the potential for EMFs to carry and influence emotional states, offering a physical basis for emotions that could be harnessed in HRI [16].
Moreover, the development of innovative methods for measuring EMF activity generated by neurons has demonstrated the feasibility of non-invasive, real-time monitoring of human brain activity. This technique, capable of distinguishing between different brain activities associated with motor movement, motor imagery, and emotional imagery, underscores the potential for EMF-based technologies to detect and interpret human emotions [32]. It’s evident that while visual, auditory, and physiological sensors have significantly advanced our ability to detect and interpret human emotions in HRI, the addition of electromagnetic field (EMF) detection presents an unparalleled opportunity to enhance this capability further [11]. By integrating these methodologies into robotic systems,
The integration of EMF detection in HRI invites a reevaluation of emotional contagion, expanding it beyond the mimicry of facial expressions or vocal intonations to include the electromagnetic aspect of emotional exchange. It becomes conceivable to design robots that can not only "sense" human emotions through EMF detection but also respond in emotionally congruent manners, enhancing the emotional depth and authenticity of HRI. This approach aligns with the growing recognition of the intricate relationship between electromagnetic exposure and various biological responses, suggesting a direct pathway through which robots could engage in the emotional lives of humans.
Incorporating EMFs as a new modality in HRI not only challenges existing paradigms but also opens up innovative avenues for creating more empathetic and emotionally intelligent robotic companions. As research in this area progresses, it holds the promise of transforming the interaction between humans and robots, moving towards interactions that are as emotionally rich and complex as those between humans.
2.2. Empirical Foundations: Validating EMF detection for Emotional Insights in HRI
The empirical journey into understanding emotional contagion through EMFs has been marked by significant research efforts exploring the detection and impact of bioelectromagnetic fields on emotional states. Key studies in this domain have provided foundational insights into how emotional states, encoded as electromagnetic signals, not only affect the individual but also influence others, contributing to the phenomenon of emotional contagion.
McCraty, Bradley, and Tomasino’s Study on Heart-Brain Interaction and Emotional Regulation:
• Methodology: This study investigated the interaction between the heart’s electromagnetic field and brainwave patterns during different emotional states. The research utilized electrocardiography (ECG) and electroencephalography (EEG) to measure the physiological responses of participants exposed to emotional stimuli.
• Participants: Involving 45 adult participants, the study sought to understand the variability in response to controlled emotional inducement.
• Tests Conducted: Participants were shown a series of images designed to elicit a range of emotions, from positive (joy, love) to negative (anger, fear). Simultaneous recordings of ECG and EEG were analyzed to observe the heart-brain synchronization phenomena.
• Findings: The study found that positive emotional states led to increased coherence between the heart’s electromagnetic field and the brain’s electrical activity, suggesting a significant role of the heart in emotional regulation and the potential for these coherent states to be communicated or perceived by others. [22]
HeartMath Institute’s Research on Emotional Contagion:
• Methodology: Focused on exploring the heart’s electromagnetic field’s influence on nearby individuals, this research utilized HRV measurements to assess the emotional contagion effect.
• Participants: Conducted with over 60 participants in various group settings, the study meticulously measured how individuals’ HRV patterns could synchronize in response to shared emotional experiences.
• Tests Conducted: Groups were exposed to emotionally charged video clips while HRV data was collected. Subsequent sessions tested the ability of participants to consciously align their emotional states through techniques like heart-focused breathing.
• Findings: Results demonstrated that individuals’ heart rhythms could indeed synchronize during shared emotional experiences, providing empirical evidence of emotional contagion facilitated by bioelectromagnetic fields. The study also highlighted the potential for intentional emotional regulation to influence group dynamics and individual well-being [23].
Recent Advancements in the non-invasive detection of electromagnetic fields (EMF) offer promising avenues for enhancing Human-Robot Interaction (HRI) through emotional contagion. The research by Wiginton, Brazdzionis and others demonstrates the feasibility of using proprietary EMF sensors to accurately measure the brain’s electromagnetic fields through the scalp and skull [4,34,35]. This study underscores the potential of EMF detection technologies to distinguish between different brain activities and external interferences, offering a substantial empirical foundation for the proposed integration of EMF detection in HRI systems. The ability to non-invasively capture and analyze EMF signals related to emotional states presents a significant step forward in developing robots capable of achieving deeper emotional connections with humans. This evidence bolsters the argument for a multimodal approach to emotional contagion in HRI, highlighting the critical role of EMF detection in enhancing the empathetic responsiveness of robotic systems.
3. Discussions
3.1. Justifying EMF Detection in HRI Modalities
Complementing Facial Expression Recognition and Mimicry: Enables robots to engage in emotional contagion through visual cues. EMF detection offers consistent emotional insight even in visually obstructed scenarios, enhancing empathetic accuracy [3,10].
Augmenting Voice Emotion Recognition: Adds an auditory dimension to emotional understanding in HRI. EMF detection complements by providing emotional states independently of auditory conditions, ensuring a robust mechanism for emotional analysis that combines sound and electromagnetic signals [37].
Enhancing Physiological Signal Analysis: Offers direct insights into emotional arousal through physiological signals. EMF detection provides a non-invasive, no-contact alternative, complementing physiological analysis and broadening emotional contagion applications in HRI [17].
Enriching Touch and Gesture-Based Interaction: Introduces a tactile dimension to emotional contagion, fostering comfort and companionship. EMF detection enhances interaction timing and appropriateness by providing preliminary emotional context, improving comfort and effectiveness [32,38].
Informing Social and Contextual Cues: Interpretation Critical for nuanced emotional responses in HRI. EMF detection enriches understanding of the emotional atmosphere without explicit inputs, enabling more adaptive and responsive interactions [8].
Overall Impact of EMF Detection: Exploring the integration of electromagnetic field (EMF) detection within human-robot interaction paradigms may capitalize on foundational insights into emotional contagion, mirroring the nuanced neural underpinnings of social cognition and affective resonance, thereby advancing our capacity to engineer robots capable of more authentically synchronous emotional engagements with humans [14]. It Represents a strategic enhancement to existing methodologies in HRI by addressing limitations and introducing a broader, nuanced understanding of human emotions. Promises to elevate the quality of HRI, making interactions more emotionally resonant and empathetic.
3.2. Implications and Potential Benefits
3.2.1. Deepening Emotional Resonance in HRI
Empathetic Response Enhancement: The adoption of EMF-based emotional detection technologies in robots promises to deepen the emotional resonance within human-robot interactions. This innovation allows robots not just to react to human emotions but to genuinely understand and mirror these emotions, creating a more empathetic and responsive interaction model.
3.2.2. Transformative Impact Across Various Sectors
Revolutionizing Healthcare: In therapeutic and caregiving settings, robots equipped with emotional contagion abilities can offer unprecedented levels of support and companionship, especially for patients with emotional and social disorders. The empathetic responses from robots could play a pivotal role in patient therapy and recovery [25,29,30].
Educational Advancements: In educational environments, emotionally intelligent robots can adapt their teaching methods based on the emotional states of learners, leading to highly personalized and effective learning experiences, and significantly enhancing student engagement and motivation. This capability could lead to highly personalized and effective learning experiences, significantly enhancing student engagement and motivation [24,39].
Customer Service Innovations: In the realm of customer service, robots capable of understanding and adapting to customer emotions can provide a more personalized and satisfying service experience, potentially revolutionizing the industry [26].
3.3. Limitations
While the field of emotion recognition through electromagnetic field (EMF) detection has seen exciting advancements, significant challenges remain in ensuring the accuracy and reliability of these technologies.
1. Complexity of Human Emotions:
- Humans experience a vast spectrum of emotions, influenced by individual differences, cultural backgrounds, and situational contexts [20].
- Emotions are often nuanced and transient, making it difficult to isolate and attribute specific physiological changes to distinct emotional states.
- Current EMF detection tools may struggle to capture the intricacies of emotional experiences, potentially leading to misinterpretations.
2. Subtlety of EMF Variations:
- The physiological changes associated with emotions manifest as subtle variations in EMF signatures, such as heart rate, skin conductance, and brain activity.
- These variations can be easily influenced by external factors like stress, physical activity, and environmental conditions.
- Isolating the emotional component from background noise and individual variations presents a significant challenge for EMF detection technologies
3. Lack of Standardization and Validation:
- Currently, there exists no unified approach to EMF-based emotion recognition, with diverse methodologies and equipment across different studies.
- This lack of standardization makes it difficult to compare results and assess the overall accuracy and generalizability of the technology.
- Robust validation with diverse populations and controlled experimental settings is crucial for establishing the scientific credibility of EMF-based emotion recognition.
4. Ethical Considerations:
- The potential for misuse of EMF-based emotion recognition technology raises ethical concerns about privacy, mind-reading, and manipulation.
- Clear guidelines and regulations are needed to ensure responsible development and deployment of this technology, respecting individual privacy and autonomy.
3.4. Ethical and Societal Implications of Multimodal Emotion Recognition with EMF Integration
The integration of EMF detection into multimodal emotion recognition for Human-Robot Interaction (HRI) holds immense potential but comes with significant ethical and societal implications that must be carefully considered. Here, we delve into two key areas:
1. Privacy Concerns and Data Security:
-
Sensitive Nature of Emotional Data: Unlike other physiological signals, emotional states are highly personal and vulnerable, making the data collected through EMF-based emotion recognition inherently sensitive. This necessitates stringent measures to ensure user privacy and data security:
- –
- –
- –
- Clear User Consent and Transparency: Obtaining informed consent before data collection and clearly explaining how data will be used and protected are crucial for transparency and building trust [13].
- Challenges in Implementation: Striking a balance between robust data security and practical functionality remains a challenge. Balancing anonymization with the need for identifying individuals for personalized recognition, or minimizing data storage with the need for longitudinal analysis, requires careful consideration of specific use cases and ethical frameworks.
2. Consent and Autonomy:
-
Potential for Misuse and Manipulation: Robots equipped with emotion recognition abilities could potentially be used to exploit or manipulate human emotions, raising concerns about individual autonomy and well-being [1]. This necessitates ethical guidelines and standards to:
- –
- Define Acceptable Uses: Clear definitions of what constitutes acceptable and unacceptable use of emotion recognition technology are crucial to prevent manipulation and exploitation [40].
- –
- Implement Transparency and Explainability: Users should be able to understand how emotion recognition is used and how it might influence robot behavior, ensuring transparency and fostering trust [41].
- –
- Maintain User Control: Mechanisms allowing users to opt-out of emotion recognition or control how their data is used can empower individuals and safeguard their autonomy.
- Complexities in Consent: Obtaining meaningful consent for emotion recognition can be challenging due to the dynamic nature of emotions and potential subconscious influences. Exploring dynamic consent models and continuous feedback mechanisms could address these complexities.
Addressing these ethical and societal concerns through robust data security measures, clear ethical guidelines, and user-centric design principles is crucial for responsible development and deployment of multimodal emotion recognition with EMF integration. Only then can this technology fulfill its potential to enhance HRI without compromising privacy, autonomy, or human well-being.
3.5. Future Research Directions
While the allure of using EMF data for emotion recognition in HRI is potent, significant research efforts are needed to refine the technology and ensure its responsible deployment. Here, we delve into key areas demanding further exploration:
1. Refining EMF Detection Techniques:
Enhanced Sensor Technology: Developing sensors with heightened sensitivity and the ability to discern relevant signals amidst background noise and artifacts is crucial. Recent advancements in magnetic field sensors show promise for detecting subtle physiological changes with minimal invasiveness [36].
Context-Aware Interpretation: Investigating how environmental factors like temperature and humidity, alongside individual physiological variations, influence EMF signatures associated with emotions is vital. Studies suggest environmental factors can impact EEG readings, potentially influencing EMF emissions as well [43]. In this context, the study by Tognola et al. (2022) on RF electromagnetic field (EMF) exposure in connected cars serves as a pertinent reminder that the technological and environmental EMF backdrop can significantly impact the detection and interpretation of emotional EMFs in HRI. Their findings, indicating that EMF exposure from various sources remains within safe limits, reinforce the importance of accounting for ambient EMF conditions when refining EMF detection techniques for emotional contagion. This consideration ensures the development of HRI systems that are both sensitive to the nuances of human emotions and cognizant of the safety and reliability of EMF detection in technologically dense environments [28].
Signal Decomposition Techniques: Separating emotional signatures from physiological processes contributing to EMF signals requires further exploration. Techniques like independent component analysis (ICA) have been employed to decompose EEG signals, potentially offering similar applications for EMF data [42].
2. Understanding the Link between EMF and Emotions:
Mapping EMF Patterns to Emotions: Conducting comprehensive studies to map specific EMF patterns to distinct emotions, considering individual and cultural variations, is essential. Such studies could leverage multimodal approaches incorporating physiological measures, facial expressions, and self-reported emotions for robust mapping.
Investigate Mechanisms: Exploring the physiological and neurological mechanisms underlying the relationship between emotions and EMF emissions remains a challenge. Advances in functional magnetic resonance imaging (fMRI) and electroencephalography (EEG) research might shed light on these connections [2,5,7].
Validation and Generalizability: Ensuring findings are robust and generalizable across diverse populations and contexts necessitates large-scale studies with varied participants and controlled experimental settings.
3. Ethical Considerations and Societal Impact:
Privacy and Security: Implementing robust data security and privacy protocols, including anonymization, encryption, and strong user consent, is paramount to protect individual data and ensure informed participation [12].
Potential for Manipulation: Evaluating and mitigating the possibility of misusing this technology for emotional manipulation or exploitation is crucial. Addressing concerns about algorithmic bias and its influence on emotion recognition outcomes is equally important [8,40].
Transparency and Explainability: Guaranteeing transparency in how EMF data is used and making the decision-making process of emotion recognition interpretable through explainable AI techniques fosters trust and responsible use [41].
4. Collaboration and Interdisciplinary Research:
Fostering collaboration between engineers, neuroscientists, psychologists, ethicists, and social scientists is crucial to tackling the technological, psychological, and ethical challenges head-on. Interdisciplinary efforts can lead to holistic solutions that are both effective and ethically sound. Developing regulations and guidelines for the responsible development and deployment of EMF-based emotion recognition technologies requires collaborative efforts from academia, industry, and policymakers to ensure ethical and beneficial applications.By addressing these research directions and establishing responsible frameworks, we can unlock the potential of EMF integration in emotion recognition while prioritizing its ethical application for the betterment of society.
4. Conclusion
This exploration into the integration of electromagnetic field (EMF) detection within human-robot interaction (HRI) marks a significant stride towards realizing more intuitive and emotionally resonant robotic systems. The investigation not only unveils the potential for EMFs to act as a novel conduit for emotional exchange but also illuminates the path for leveraging this modality to deepen the empathetic connections between humans and robots. By marrying the subtle, often invisible world of EMFs with the tangible interactions facilitated by HRI, this research proposes a paradigm shift in how we conceive emotional contagion within the realm of robotics.
The potential applications of this research span across therapeutic, educational, and social domains, suggesting a future where robots could significantly augment human emotional well-being and interpersonal connectivity. However, the journey ahead is fraught with technological, ethical, and interpretative challenges. Overcoming these hurdles necessitates a multidisciplinary approach, drawing from neuroscience, psychology, robotics, and ethics to refine EMF detection technologies, ensure their ethical deployment, and truly understand the electromagnetic substrates of emotional states.
As we venture into this uncharted territory, it becomes crucial to maintain a balanced discourse on the implications of EMF-based emotional contagion in HRI. The promise held within this novel modality invites us to re-imagine the boundaries of empathy and connectivity in human-robot relations. Yet, it also compels us to proceed with caution, ensuring that advancements in this field are guided by ethical considerations and a profound respect for human emotional complexity. The future of HRI, enriched by EMF detection, beckons a horizon brimming with possibilities – a future where robots not only understand human emotions but resonate with them, fostering a deeper sense of empathy and understanding across the fabric of society.
References
- M. Anderson and S. L. Anderson, "Machine ethics: Creating an ethical intelligent agent," In Machine Ethics and Robot Ethics, pp. 237–248, Routledge, 2020. [CrossRef]
- C. Bethel, K. Salomon, R. Murphy, and J. Burke, "Survey of psychophysiology measurements applied to human-robot interaction," 2007. No publication source provided. [CrossRef]
- S. Borgomaneri, C. Bolloni, P. Sessa, and A. Avenanti, "Blocking facial mimicry affects recognition of facial and body expressions," Plos One, vol. 15, no. 2, e0229364, 2020. [CrossRef]
- J. Brazdzionis, J. Wiginton, T. Patchana, P. Savla, J. Hung, Y. Zhang, and D. E. Miulli, "Measuring the electromagnetic field of the human brain at a distance using a shielded electromagnetic field channel," Cureus, 2022. No volume or issue provided. No DOI provided.
- Y. Cai, X. Li, and J. Li, "Emotion recognition using different sensors, emotion models, methods and datasets: A comprehensive review," Sensors, vol. 23, no. 5, pp. 2455, 2023. No DOI provided. [CrossRef]
- A. F. Calvao, J. Monteiro, D. Carneiro, and J. S. Santos, "Privacy in emotion recognition systems: A survey," ACM Computing Surveys (CSUR), vol. 50, no. 3, Article 41, 2017.
- T. Y. R. Destyanto et al., "Emotion detection research: A systematic review," International Journal of Industrial Engineering and Engineering Management, vol. 5, no. 1, pp. 31-43, 2023. No DOI provided. [CrossRef]
- W. Graterol, J. Diaz-Amado, Y. Cardinale, I. Dongo, E. Lopes-Silva, and C. Santos-Libarino, "Emotion detection for social robots based on NLP transformers and an emotion ontology," Sensors, vol. 21, no. 4, 1322, 2021. [CrossRef]
- E. Hatfield, J. T. Cacioppo, and R. L. Rapson, Emotional contagion, Cambridge University Press, 1993. [CrossRef]
- A. Holland, G. O’Connell, and I. Dziobek, "Facial mimicry empathy and emotion recognition: A meta-analysis of correlations," Cognition & Emotion, vol. 35, no. 1, pp. 150–168, 2020. [CrossRef]
- E. Hosseini, "Brain-to-brain communication: The possible role of brain electromagnetic fields (As a potential hypothesis)," Heliyon, vol. 7, no. 3, e06363, 2021. [CrossRef]
- M. Jeon, "Turning hart into heart: Human emotional AI/robot teaming," In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, vol. 65, no. 1, pp. 1044–1048, 2021. [CrossRef]
- C. Koolen, "Transparency and consent in data-driven smart environments," SSRN Electronic Journal, 2020.
- R. Adolphs, "The social brain: neural basis of social knowledge," Annual Review of Psychology, vol. 60, pp. 693–716, 2009. [CrossRef]
- C. Herrando and E. Constantinides, "Emotional contagion: A brief overview and future directions," Frontiers in Psychology, vol. 12, 2021. [CrossRef]
- J. Kaszuba-Zwoińska, J. Gremba, B. Gałdzińska-Calik, K. Wójcik-Piotrowicz, and P. J. Thor, "Electromagnetic field induced biological effects in humans," Przegląd Lekarski, vol. 72, no. 11, pp. 636-641, 2015.
- M. Li, L. Xie, Z. Tan, Z. Wang, and F. Ren, "Emotional contagion system by perceiving human emotion based on physiological signals," In 2018 First Asian Conference on Affective Computing and Intelligent Interaction (ACII Asia), IEEE, 2018. [CrossRef]
- S. M. Matteson, S. E. Sherrod, and S. C. Cetin, "Collection, storage, protection, and sharing issues with large-scale data sets," SAGE Publications, 2017. [CrossRef]
- A. McStay, "Emotional AI, soft biometrics, and the surveillance of emotional life: An unusual consensus on privacy," Big Data & Society, vol. 7, no. 1, 205395172090438, 2020. [CrossRef]
- D. Mendonça, "Seeing complexity to continue to understand emotions," Journal of Philosophy of Emotion, vol. 3, no. 1, pp. 39-48, 2021.
- M. Quiroz, R. Patiño, J. Diaz-Amado, and Y. Cardinale, "Group emotion detection based on social robot perception," Sensors, vol. 22, no. 10, 3749, 2022. [CrossRef]
- R. McCraty, M. Atkinson, and D. Tomasino, "Modulation of DNA conformation by heart-focused intention," HeartMath Research Center, Institute of HeartMath, Doc. No. 03-008, 2003.
- R. McCraty and D. Tomasino, "Science of the Heart: Exploring the Role of the Heart in Human Performance," HeartMath Research Center, Institute of HeartMath, Vol. 2, 2004. [CrossRef]
- N. Reich-Stiebert and F. Eyssel, "Learning with Educational Companion Robots? Toward Attitudes on Education Robots, Predictors of Attitudes, and Application Potentials for Education Robots," International Journal of Social Robotics, vol. 7, no. 5, pp. 875–888, 2015. [CrossRef]
- M. Spekman, E. Konijn, and J. Hoorn, "Perceptions of healthcare robots as a function of emotion-based coping: The importance of coping appraisals and coping strategies," Computers in Human Behavior, vol. 85, pp. 308-318, 2018. [CrossRef]
- M. Spezialetti, G. Placidi, and S. Rossi, "Emotion Recognition for Human-Robot Interaction: Recent Advances and Future Perspectives," Frontiers in Robotics and AI, vol. 7, article 532279, 2020. [CrossRef]
- M. Timchenko and A. Trachtenberg, "Distributed anonymous data collection and feedback," In Proceedings of the 8th ACM International Systems and Storage Conference, ACM, 2015. [CrossRef]
- G. Tognola, M. Bonato, M. A. Benini, S. Aerts, S. Gallucci, and E. Chiaramello et al., "Survey of exposure to RF electromagnetic fields in the connected car," IEEE Access, vol. 10, pp. 47764-47781, 2022. [CrossRef]
- G. Tulsulkar, N. Mishra, N. Thalmann, H. Lim, M. Lee, and S. Cheng, "Can a humanoid social robot stimulate the interactivity of cognitively impaired elderly? A thorough study based on computer vision methods," The Visual Computer, vol. 37, no. 12, pp. 3019-3038, 2021. [CrossRef]
- Z. Warren, Z. Zheng, A. Swanson, E. Bekele, L. Zhang, J. Crittendon, and N. Sarkar, "Can robotic interaction improve joint attention skills?" Journal of Autism and Developmental Disorders, vol. 45, no. 11, pp. 3726-3734, 2013. [CrossRef]
- W. Yang and Y. Xie, "Can robots elicit empathy? The effects of social robots’ appearance on emotional contagion," Computers in Human Behavior: Artificial Humans, 2024. [CrossRef]
- S. You and L. Robert, "Emotional attachment performance and viability in teams collaborating with embodied physical action (EPA) robots," Journal of the Association for Information Systems, vol. 19, no. 5, pp. 377-407, 2018. [CrossRef]
- C-E. Yu, "Emotional contagion in human-robot interaction," e-Review of Tourism Research, vol. 17, no. 5, 2020.
- J. Wiginton, J. Brazdzionis, T. Patchana, P. Savla, J. Hung, Y. Zhang, and D. E. Miulli, "Novel method of electromagnetic field measurements of the human brain," Cureus, 2022a. No volume, issue, or DOI provided.
- J. Wiginton, J. Brazdzionis, T. Patchana, P. Savla, J. Hung, Y. Zhang, and D. E. Miulli, "Measuring electromagnetic field activity generated by neurons in vivo by humans with thoughts of repetitive motor activities and emotional thoughts," Cureus, 2022b. [CrossRef]
- D. Murzin, D. J. Mapps, K. Levada, V. Belyaev, A. Omelyanchik, L. Panina, and V. Rodionova, "Ultrasensitive Magnetic Field Sensors for Biomedical Applications," Sensors, vol. 20, no. 6, 1569, 2020. [CrossRef]
- A. Gupta and D. Mishra, "Sentimental Voice Recognition: An Approach to Analyse the Emotion by Voice," in 2023 International Conference on Electrical, Electronics, Communication and Computers (ELEXCOM), Roorkee, India, 2023, pp. 1-6, doi: 10.1109/ELEXCOM58812.2023.10370064. [CrossRef]
- J. Allen and K. E. MacLean, "Personal Space Invaders," in Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction Extended Abstracts, ACM, New York, NY, USA, 2015.
- N. Sheoran, Nisha, and K. Chaudhary, "Robots in education," in Technology-Driven E-Learning Pedagogy Through Emotional Intelligence, pp. 58–80, IGI Global, 2023, http://dx.doi.org/10.4018/978-1-6684-7639-0.ch005. [CrossRef]
- S. Nyholm and L. Frank, "It loves me, it loves me not," Techné: Research in Philosophy and Technology, vol. 23, no. 3, pp. 402-424, 2019. [CrossRef]
- A. Rossi, M. Scheunemann, G. L’Arco, and S. Rossi, "Evaluation of a humanoid robot’s emotional gestures for transparent interaction," pp. 397-407, 2021. [CrossRef]
- K. R. Ball, N. Bigdely-Shamlo, T. Mullen, and K. A. Robbins, "Pwc-ica: a method for stationary ordered blind source separation with application to eeg," Computational Intelligence and Neuroscience, 2016, pp. 1-20. [CrossRef]
- M. Zhu, W. Liu, and P. Wargocki, "Changes in EEG signals during the cognitive activity at varying air temperature and relative humidity," Journal of Exposure Science & Environmental Epidemiology, vol. 30, no. 2, pp. 285-298, 2019. [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



