
Submitted:
19 February 2024
Posted:
19 February 2024
You are already at the latest version
Abstract
GNSS is nowadays a standard tool for monitoring and studying the Earth’s dynamic environment. However, the development of dense GNSS measurements remains limited in many experiments by the cost of geodetic-class equipments allowing to achieve the high precision required by many applications. Recently, multi-constellation, multi-frequency, low-power and, above all, less expensive GNSS electronic chips have become available. We present a prototype of a low-cost, open-source multi-GNSS station. Our prototype comprises a dual-frequency GNSS chip, a calibrated antenna, a Raspberry Pi card and a 4G key for data transmission. The system is easy to deploy in the field and allows precise positioning in real time and post-processing. We assess the performance of our prototype in terms of raw data quality, and quality of the obtained high rate and daily position one-year-long time series. Our results demonstrate a quality equivalent to geodetic-class equipment and better quality than other low-cost systems proposed so far.
Keywords:
low-cost
; GNSS
; crustal deformation
; geodynamics
1. Introduction
Over the last three decades, geodetic observations have been key for monitoring the physical parameters of the Earth’s environment (see [1] for a review). Observed parameters include the motion of tectonic plates, slow crustal deformation, transient slip along faults, seismic waves during earthquakes, landslide monitoring, volcanic deformation, sea surface and moisture estimates near GNSS antennas, water content monitoring in the troposphere, monitoring of the ionosphere, in addition to the realization of reference frames that define the basis of most applications. Scientists studying earth science have made huge efforts to improve the spatial coverage of permanent Global Navigation Satellite System (GNSS) networks and to support the continuity of observation over time. Such efforts incur significant costs, due to the current price of geodetic-class GNSS receivers and antennas and then the logistics required for installation and regular maintenance. Geodetic-class GNSS stations, through high tracking performance of the satellite signals allow position measurements with an accuracy of one to a few millimeters for daily static positioning, which is desirable for catching and quantifying a wide range of geophysical processes. Aside from the development of permanent GNSS networks, there is also a need for affordable easy-to-deploy equipment to perform episodic GNSS measurements at geodetic markers. Survey mode measurements are useful for (1) repeated long-term surveying of tectonically active areas and (2) installing continuous temporal networks to complement the record of cos-post-seismic deformation in rapid response to large earthquakes (e.g., [1,2]).
A new approach that seems to have captured the scientific community’s interest is the use of low-cost GNSS sensors, which leaves open questions about their reliability and precision regarding long-term position determination. In recent years, new cost-efficient multi-frequency GNSS chips and GNSS antennas have been introduced to the commercial market (e.g. [3]). Those equipments captured the scientific community’s interest, possibly opening the opportunity of position solutions at a precision similar to those obtained from geodetic-class GNSS stations. Low-cost equipment offers low energy consumption, GNSS signal to high-frequency sampling rates (up to 100 Hz in some cases) for a ∼ten to twenty times lower prices than the high-class GNSS sensors (Table 1, ∼500-1000€). One important question for scientific applications remains to quantify the performance of such low-cost equipments and precisely assess their ability to meet the requirements of the various applications.
Previous studies have suggested a good performance of dual-frequency low-cost receivers, mainly for the u-blox ZED-F9P associated either with geodetic-class or low-cost antennas, for both post- and real-time processing. Most of the published studies used GNSS observation time windows spanning from days to a few months, which might be short to assess the performance of low-cost receivers for long-term surveying ([4,5,6], among others). In detail, while low-cost receivers reach millimeter-level accuracy for static daily positioning, their positioning accuracy in kinematic mode appears to be more challenging when using long baselines (e.g., [4]). Recently, Tunini et al. [7] compared the performance of an u-blox ZED-F9P receiver to two geodetic-class receivers by connecting the three receivers to the same geodetic-class antenna. They collected five months of data in 2021 where quality check statistics showed that, for most days, the low-cost receiver retrieved 60-70% of the observations while geodetic-class receivers retrieved 90%. Despite this drawback, the u-blox reaches a precision in daily displacement estimates comparable to the geodetic-class receivers with a double difference post-processing strategy. Tunini et al. [7] conclude that the dual-frequency, low-cost geodetic receiver u-blox ZED-F9P is suitable for crustal deformation studies.
In this study, we aim at improving the current state-of-the-art of low-cost GNSS receivers. We present a ready-to-use dual-frequency GNSS low-cost station. Our station uses a Septentrio Mosaic-X5 card and a low-cost AS-ANT3BCAL antenna. Our GNSS station also offers data transmission capabilities through a cellular connection, making it ideal for precise post- and real-time positioning. We perform a detailed analysis of a one-year-long dataset using different approaches to evaluate the quality of static and kinematic positioning. We assess the precision by comparing the latter with respect to those obtained for geodetic-class Trimble receivers and the low-cost u-blox receiver. Compared to previous studies using the u-blox ZED-F9P card, we find that our proposed low-cost station improves the positioning accuracy in static and kinematic modes relative to the other equipment, indicating that it is well-suited for continuous and survey-mode geophysical applications.
2. Materials and Methods
2.1. Hardware specifications and description of the system
The system includes a dual-frequency GNSS board associated to a Raspberry Pi B+ v1.2 card, a 4G dongle cellular modem, and an officially calibrated antenna (Figure 1). The selected GNSS chip is a mosaic-X5 GNSS receiver module from Septentrio, which has the same GNSS signal tracking capabilities as geodetic-class GNSS receivers. The mosaic-X5 is plugged onto an electronic board (simpleRTK3B Pro) designed by ArduSimple and sold as MOSAIC-HAT. MOSAIC-HAT is an Open-source GPS/GNSS electronic board with basic communication capabilities. In order to control the MOSAIC HAT board, we plugged it into the Raspberry General Purpose Port (GPIO, Figure 2) instead of the USB port due to its robustness.
The AS-ANT3BCAL is a triple-band GPS/GNSS antenna manufactured by Ardusimple. It is compatible with the MOSAIC-HAT board and benefits of open access calibration products provided by the National Geodetic Survey (NGS, [8]) for processing geodetic observations in the International Terrestrial Reference Frame (ITRF). The antenna is rugged and small in dimension (∼15 cm diameter) with Phase Center Variations (PCVs) lower than 3 mm at all elevations [9], recommended to work in environmental conditions from -40° to +85°C.
This development aims to facilitate the deployment of GNSS stations in the field (e.g., Figure 1). It is designed for easy data transmission for either permanent networks for real-time kinematic positioning or hourly and/or daily transmission for near-real time static positioning. It is also useful for data collection during surveys. The power consumption of the whole system, including the GNSS antenna and data transmission at a 1-second sampling rate, is ∼3.5 Watts. Such power consumption is lower than the one found (∼5 W) for many continuous geodetic-class GNSS receivers. Table 1 compiles the main characteristics of the GNSS receivers used in the current study.

Table 1.
Main characteristics of the GNSS stations used in the current study. For a complete description, please refer to the respective manufacturer datasheet.
Table 1.
Main characteristics of the GNSS stations used in the current study. For a complete description, please refer to the respective manufacturer datasheet.
| Site name | SEPT | UBLO | SOPH | NICE |
|---|---|---|---|---|
| Receiver | Septentrio MOSAIC-X5 | Ublox ZED-F9P | Trimble NetR9 | Trimble NetR9 |
| Antenna | AS-ANT3BCAL | AS-ANT3BCAL | Ashtech Choke ring ASH701933A_M |
Zephyr 2 Geodetic |
| Satellite System | GPS, GLONASS, Galileo, Beidou, Navic, QZSS, SBAS |
GPS, GLONASS, Galileo, Beidou, QZSS, SBAS |
GPS, GLONASS, SBAS | GPS, GLONASS, Galileo, Beidou, QZSS, SBAS |
| Channels | 448 | 184 | 440 | 440 |
| Firmware upgrades | Free | Free | Not Free | Not Free |
| Price | ∼1000€1 | ∼500€1 | ∼10000€2 | ∼10000€2 |
1 Price accounts for the GNSS station + cellular modem. 2 Price should be considered as referential (local representative) and just includes the effective cost of GNSS receiver + antenna.
2.2. Software: Flowchart Process
We used a low-cost single-board Raspberry Pi computer to control the Septentrio Mosaic-X5, to manage the data flow and handle data transmission (Figure 2). The Raspberry Pi is equipped with a 16 GB SD flash memory splitted into two logical partitions. The first partition hosts the Linux Raspbian operating system and uses an Overlay File System that prevents corrupting the integrity of the SD memory. It also ensures that the system always reboots in the same user-defined configuration. The second partition is dedicated to the data management.
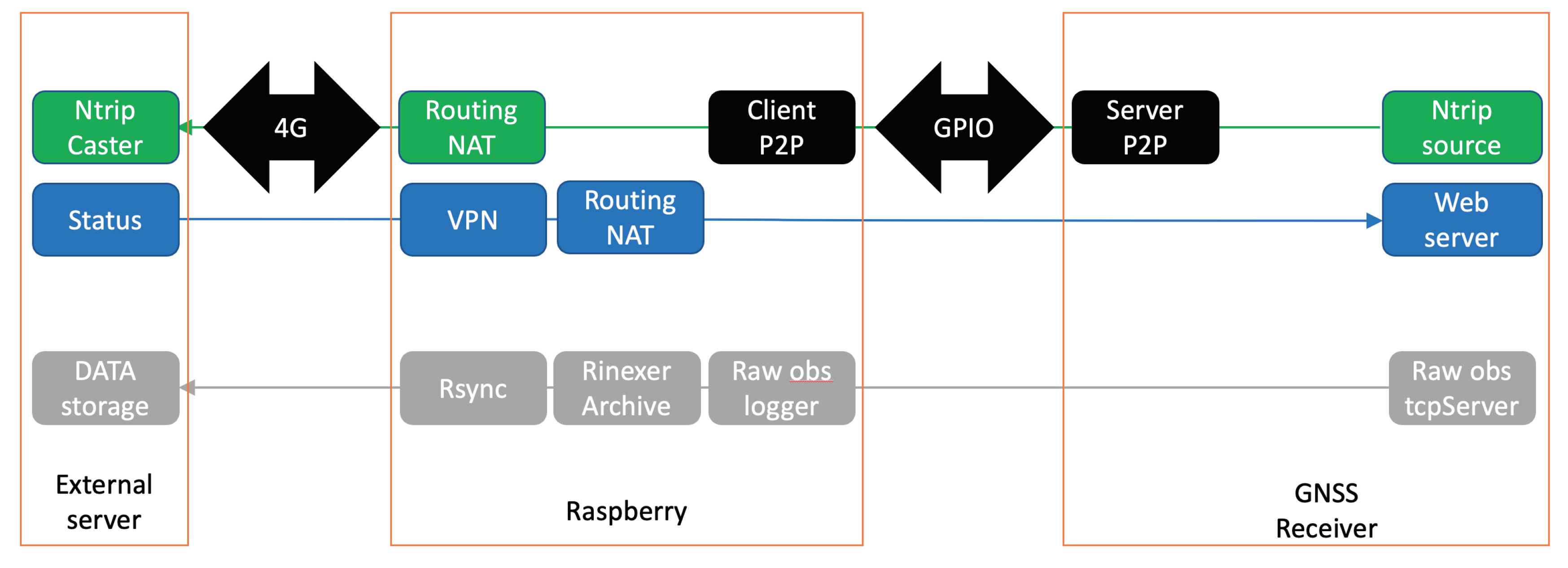
We developed a software that manages the communication, acquisition, and data storage in the manufacturer’s raw format (Septentrio Binary Format, SBF) and the standard international GNSS format (Receiver INdependent EXchange format, RINEX). Internal communication between MOSAIC-HAT and Raspberry PI relies on a point-to-point IP link (P2P, Figure 2) through the serial port at 2 KB/s (kilobytes per second) for a 1-second GNSS sampling rate. Hourly raw files are firstly stored on Raspberry’s RAM to reduce the writing cycles in the SD flash card, while a second routine makes a data flush from the RAM to the SD card. A key feature of our all-in-one GNSS station is the implementation of dedicated routines to convert, compress, and archive GNSS data in raw and RINEX 3 formats using the RTKLIB-convbin tool. Hourly raw files are locally archived and then decimated to a single daily file of 24 hours at a 30-second sampling rate in the RINEX format. Typical data size is ∼7.5 Megabytes (MB) for an hourly raw file of GNSS observations and ∼2 MB for the RINEX file. Both hourly and daily files are then sent and archived to a data center through an open VPN connection. We also included a ring buffer script that cyclically deletes the oldest data from the SD memory. In parallel, real-time observation streaming uses the standard Ntrip protocol (Figure 2).
The Raspberry is connected to the internet though a 4G USB cellular modem. The modem is automatically restarted in case of connection loss. The Raspberry is configured as a router in order to enable (1) direct access to the GNSS receiver settings from outside 2) to allow communication from the GNSS receiver to the Ntrip caster when selecting the real-time stream option, 3) to monitor the status of the station, and 4) to allow bidirectional data transmission (Raspberry - external server) based on the rsync incremental backup tool. We make all the developed routines and software publicly available on Gitlab at OCA.
Figure 2.
Flowchart implemented in Septentrio mosaic-X5 station prototype. 4G: Cellular modem. GPIO: General Purpose Port. Ntrip: Networked Transport of RTCM via Internet Protocol. VPN: Virtual Private Network. P2P: Point-two-Point. NAT: Network Address Translation.
Figure 2.
Flowchart implemented in Septentrio mosaic-X5 station prototype. 4G: Cellular modem. GPIO: General Purpose Port. Ntrip: Networked Transport of RTCM via Internet Protocol. VPN: Virtual Private Network. P2P: Point-two-Point. NAT: Network Address Translation.
3. Results
We assess the performance of our all-in-one low-cost GNSS station, hereafter referred to by code SEPT, against existing nearby or co-located equipment. Compared stations are: (1) the SimpleRTK2B electronic board, also manufactured by Ardusimple. Such a board integrates the Ublox’s ZED-F9P GNSS receiver and does not track all available GNSS signals (Table 1). We used the same approach described above to control the SimpleRTK2 board and its data flow using a Raspberry PI card. The u-blox receiver is hereafter referred to as code UBLO. The Septentrio Mosaic-X5 and Ublox ZED-F9P GNSS receivers are both connected to an Ardusimple AS-ANT3BCAL antenna using a GNSS antenna splitter. (2) Site SOPH, equipped with a Trimble NetR9 receiver and Ashtech Choke ring antenna, located a few meters away from the SEPT and UBLO sites. (3) Site NICE located 20 km away from SEPT, UBLO and SOPH, equipped with a Trimble NetR9 receiver and Zephyr 2 antenna. SOPH and NICE are part of the National French GNSS Network (RENAG) and hence continuously record GNSS data [10] analyzed by numerous analysis centers (IGS, EUREF, NGL, Renag etc.).
In the following, we first evaluate the satellite data tracking performance for each system. Then we compare the results obtained for static positioning and finally show the results obtained for kinematic positioning.
3.1. Data Statistics and Quality
The statistical analysis of recorded data directly provides a first evaluation of the performance of our low-cost GNSS SEPT station. Such analysis provides qualitative information that reflects 1) the performance of the receiver tracking throughout time and 2) the level of multipath error and cycle slips from environmental conditions (e.g., buildings, trees, etc.) that could affect positioning accuracy. Statistics computed with the Anubis software [11] show that satellite tracking capacities (Figure 3), the number of daily GNSS observations above the horizon, from the SEPT, SOPH, and NICE stations are consistent (75-85%) during the evaluated time interval (from 06-2022 to 07-2023). However, the number of observations at the UBLO station is ∼20% lower than SEPT and SOPH for most days since April 2023, a result consistent with [7]. On the other hand, we also observe lower daily cycle slip values at the SEPT station relative to those observed at the low-cost UBLO station for all GNSS constellations (Figure 4), suggesting a higher signal-to-noise ratio and probably less drifting in the receiver’s clock. Additionally, cycle slips at SEPT are consistent with values at the permanent NICE station for the GPS, Galileo and BeiDou constellations and at the SOPH station for the GPS constellation. For the GLONASS constellation, the cycle slips are slightly higher at SEPT than NICE and SOPH.
Aside from the results of cycle slips described above, Figure 5 depicts an example of the multipath error estimation for the SEPT, UBLO, SOPH, and NICE stations on the L2 frequency (GPS, GLONASS) and for NICE, SEPT, and UBLO on L7 (Galileo, BeiDou). Since the environment surrounding the antenna of the NICE station is slightly different from the others, we have included it in the comparison to have first-order information in the statistics for the Galileo and BeiDou constellations. The comparison therefore shows lower multipath values at the SEPT station (∼30 cm for GPS-GLONASS and ∼2 cm for Galileo) relative to the UBLO station (40-45 cm for GPS-GLONASS and ∼26 cm for Galileo) for all constellations, suggesting an excellent algorithm of multipath mitigation that might also result in lower noise levels at the positioning solution. Surprisingly, multipath values at SEPT are also quite similar or even lower than values observed at the SOPH station, pointing out the excellent accuracy of the low-cost antenna as suggested in Krietemeyer et al. [12] and Curone et al. [9].
3.2. GNSS Positioning - Daily solution
Geophysical disciplines, such as seismology or geodesy, are focused on characterizing as accurately as possible short and long-term processes linked to tectonic plate motions and other Earth’s internal deformation processes (loading, fluids, etc.). From the point of view of geodynamics, for example, continuous GPS measurements provide direct information to quantify the surface displacement related to the different phases of the seismic cycle (inter-cos-pos-seismic, episodic and transient slow slip events) and model the potential processes that generate them (e.g., [1,13]). Hence, we analyze GNSS observations from the low-cost stations at a 30-second sampling rate to assess their consistency relative to high-class GNSS stations by recording the crustal motion in nearby or co-located sites over a year-long.
Daily GNSS observations were analyzed in sessions of 24 hr using the Gamit/Globk software, following the two-steps classical MIT approach for geodynamics [14,15]. In the first step, we used a network of 30 well-distributed GNSS sites in France and neighboring areas to produce daily loosely constrained solutions per constellation (GPS, GLONASS, and Galileo) by reducing double-differences of phase to coordinates. At this step, we follow, in general, International GNSS Service (IGS) standards to model elastic effects due to ocean, polar, and solid-earth tides. We used IGS tables to account for phase center variations of antennas and the Vienna Mapping Function (VMF1, [16]) to model the delay of the GNSS signal crossing the troposphere. We refer readers to Jarrin et al. [17] for more detailed description of Gamit processing procedure. Final combined orbits from the International GNSS service were used to process the GPS constellation and the GNSS combined 1-day orbits (MGEX) for GLONASS and Galileo [18,19]. In the second step, we express our solution with respect to the cumulative up-to-date solution from the global IGS-GNSS network by applying a 7-parameters Helmert transformation to produce position time series in the International Terrestrial Reference Frame (ITRF14) [20] for the GPS (G), GLONASS (R), Galileo (E) constellations, and multi-constellations (GR, GE, GER).
We firstly observe a good agreement in the time series trend –at all components in the ITRF reference frame– recorded for the low-cost SEPT and UBLO stations relative to the SOPH and NICE high-class stations. Figure 6 shows the detrended time series for the GPS constellation at the NICE, SOPH, SEPT, and UBLO stations. The visual comparison, in general, highlights a good consistency of residual positions for the three components (NEU) at the SEPT and UBLO stations relative to SOPH and NICE, supporting the performance of the low-cost equipment. In detail, however, we can notice that several residual positions depart a few millimeters at all components of UBLO, suggesting a little increase in noise content. A similar behavior is also observed when comparing residuals from the UBLO time series for the GLONASS constellation. To better illustrate that, we computed the daily repeatability of residual positions, which is an indicator of the precision, defined as the weighted residual mean squared (WRMS) of daily positions (eq. A1, [21]). Short-term repeatabilities (GPS solution) computed over 1.1 years are ∼1.5 mm for the horizontal components and 3-4 mm for the vertical component of the SOPH, NICE, and SEPT stations (Figure 7). However, short-term repeatabilities for UBLO are 0.5-1 mm higher than those estimated for the other stations in the north and vertical components. Regarding the GLONASS solution, repeatabilities increase by ∼0.5 mm for the horizontal components, likely suggesting a decrease in the precision of the GLONASS solution. Unfortunately, the L7 (E5b) frequency tracked by the Ublox receiver being not recognized by Gamit/Globk, the repeatabilities for the Galileo solution can only be evaluated at SEPT and NICE. A similar drawback in the Galileo observations was obtained while we analyzed data from Ublox receiver using the precise point positioning approach from the GINS software [22,23]. Therefore, repeatabilities for the Galileo solution at SEPT and NICE are compatible with the estimated values for the GPS solution. In the case of multi-GNSS solutions (GR, GE, GRE), repeatability values do not indicate an improvement of the precision at the horizontal components, but do for the vertical component (∼0.5-1mm/yr), relative to the values of the GPS constellation.
In addition to the repeatability, we also evaluated the noise property of the residual time series for the GPS, GLONASS, and Galileo solutions by computing the Power Spectral Density (PSD). The PSDs show a flat spectrum at high frequencies and a slope of roughly -1 at low frequencies for all sites (Figure 8), consistent with a white and flicker noise combination, as is observed in regional or global GNSS stations. We also notice that power is slightly higher at high frequencies for the UBLO station (∼0.2-0.5 /cycles per year) relative to the other stations (GPS and GLONASS spectrums). Interestingly, we also notice that power magnitude, at the east component of all stations, for the GLONASS spectrum increases by above one decade ( /cycles per year) relative to the power in the GPS and Galileo at all frequencies, which is consistent with the substantial improvement of the GPS and Galileo products in the last years (orbit, clock parameter estimation, etc., [19,24]). Overall, noise magnitudes at our low-cost station (SEPT) are almost identical to the ones at the high-class stations.
3.3. GNSS Positioning - Kinematic solution
Aside from the static positioning discussed above, geodetic positioning also provides meaningful information on the surface displacement kinematics during an earthquake. Many studies have shown the inversion of high-rate kinematic displacements, together with other data set from static GPS displacements, accelerometer, interferometric synthetic aperture radar (InSAR), and global broadband seismometer, allows to obtain a high-quality spatio-temporal image of the seismic rupture kinematics on the subduction interface following large thrust earthquakes (e.g., [2]). High-rate GNSS time series are also recently used to image the early postseismic phase, i.e. the deformation that follows the earthquake just after the seismic waves stopped (after few minutes) (e.g. [26,27]). In order to assess the ability of our low-cost SEPT station to record kinematic displacements, we performed a kinematic solution using the precise point positioning approach embedded in the GINS software [22,23]. Similarly to the Gamit/Globk setup, we used final products (orbits, clock offsets) and input models (e.g., Ocean tide loading correction) following the IGS and CNES (Centre National d’Études Spatiales) recommendations, as described in Chupin et al. [28].
Figure 9 shows an example of the kinematic displacements estimated for the GPS constellation at a 1-second sampling rate on the NICE, SEPT, SOPH, and UBLO stations on July 23, 2023. The visual comparison indicates a similar displacement evolution on SOPH, SEPT, and NICE for all components (Figure 9). As expected, their accuracy (repeatabilities) reaches values at the centimeter level, ∼2 cm for the horizontal components and ∼3 cm for the vertical, with similar noise levels for all frequencies. On the contrary, the UBLO station shows recurrent gaps and steps in its displacement evolution, pointing to a temporal loss in the receiver satellite tracking capacities (Figure 9:G) that could or could not be overcome by adding a second constellation in the analysis (e.g., multi-GNSS solution, Figure 10). Regarding the noise content, we notice the UBLO station is noisier than the other evaluated stations at low frequencies (Power spectral densities in Figure 9:D, E, and F), which is consistent with the increase of their repeatability values at 3-4 cm/day for both horizontal and vertical components. To obtain better statistics in evaluating the kinematic displacements, we randomly selected 12 days (1 day per month) covering the same time interval, 1.1 year-long, as for the static daily solutions discussed above. On each selected day, we performed a kinematic solution at a 1-second sampling rate and estimated their repeatability (WRMS).
The histograms in Figure 10 display the average WRMS value from the 12-days kinematic solutions. We observe large WRMS for the UBLO station, which increase by ∼50% (∼3 cm) at all components (NEU) relative to those computed on SEPT and SOPH for the GPS (G) and GPS-GLONASS multi-GNSS (GR) solutions. Additionally, we found abnormal displacements with recurrent gaps on the kinematic solution of the UBLO station for the GLONASS constellation, promoting unrealistic WRMS values (∼1 m). This was also the case when we evaluated UBLO’s kinematic solution for GLONASS by using the Track/Gamit software [14,15]. We therefore exclude them from our comparison in order to avoid biasing the statistics. As expected, repeatability values at SEPT are quite similar to NICE (e.g., ∼ 3 and 7 cm/yr for the horizontal and vertical components for the GPS solution) and in specific cases slightly lower (GLONASS solution) than values at SOPH, supporting the accuracy and reliability of our low-cost station for both the horizontal and vertical components. Contrary to the daily position solution, WRMS estimates from multi-GNSS solutions (GR, GE, GRE) suggest an improvement in the accuracy of the kinematic solution for both the horizontal (∼1 cm) and vertical (decrease ∼2-3 cm/yr) components of the NICE and SEPT stations.
3.4. GNSS Positioning - Real time solution
In the last years, real-time GNSS analysis has shown significant progress and contributions to crustal deformation studies and other real-time applications (volcano monitoring, meteorology, etc). These advances have made it possible to include real-time GNSS displacements at a 1-second sampling rate (1 Hz) in tsunami prediction models and earthquake early warning systems [1,29]. As the last evaluation of the low-cost SEPT station, we performed a real-time multi-GNSS (GPS, GLONASS, Galileo, Beiduo) solution during one month of data at high frequencies (1 Hz) using the PPP approach from the BKG client software [30]. Our data analysis included real-time product streams (orbits and clocks) supported by the IGS through the CDDIS holding (Crustal Dynamics Data Information System).
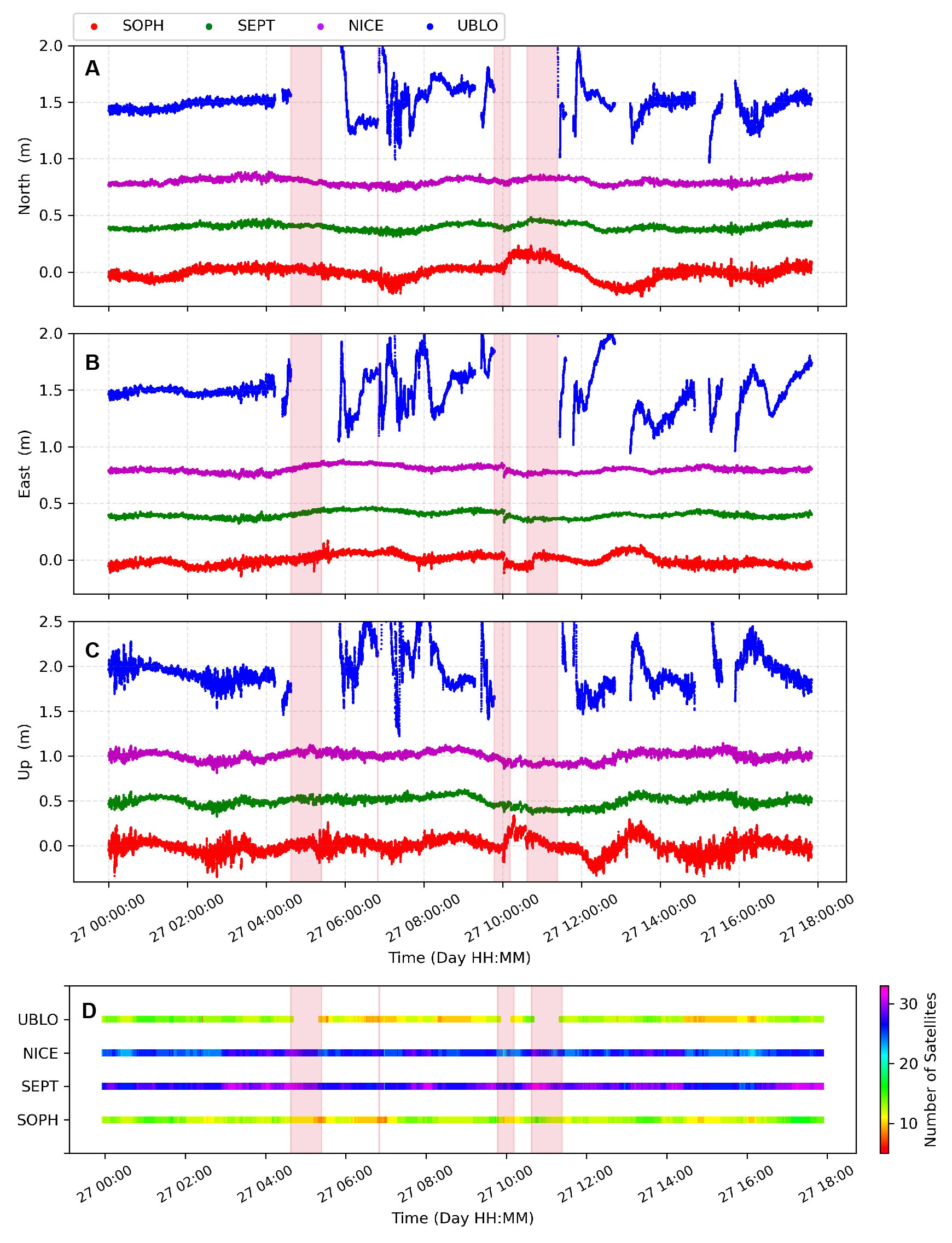
Figure 11 shows real-time displacements at the NICE, SEPT, SOPH, and UBLO stations on September 27, 2023. At first glance, we notice a poorer performance of the UBLO station, which is consistent with their data quality statistics (multipath error, cycle slip, Figure 4 and Figure 5) and the noise level discussed in the previous sections (Figure 8). Furthermore, the UBLO station also shows several gaps, steps and recurrent departs (spikes up to ∼20 and ∼100 meters in the horizontal and vertical components, respectively) from its average displacement at all components of the time series, which is not related to missing real-time products but points to a non-stable satellite tracking performance at several epochs (loss of satellite signals, Figure 11D). Such behavior in the displacement solution at UBLO is recurrent throughout the whole evaluated time interval (from September to October 2023), causing a fake detection of displacements that could introduce significant bias in the case of computing peak ground displacements (PGD) to be included in fast near-real-time earthquake magnitude determination. Similar to the kinematic and static solutions in post-processing mode, the BKG software did not recognize Galileo observations tracked on the UBLO receiver, which seems to decrease its accuracy for real-time positioning.
On the contrary, our low-cost SEPT station surprisingly reaches a similar level of accuracy in all components if we compare them with respect to the NICE and SOPH geodetic-class stations. Indeed, repeatability values at SEPT and NICE are ∼ 3 and ∼5 cm for the horizontal and vertical components and ∼ 4 and ∼7 cm estimated at SOPH for the same components. Repetabilities are therefore in the range expected for real-time solutions, as proposed in other studies (e.g., Hohensinn et al. [5])
4. Discussion
Data analysis using different approaches supports the stability and performance of the low-cost SEPT station. The official AS-ANT3BCAL antenna calibration and the noisy mitigation ability of the Mosaic-X5 receiver allow us to obtain daily static or kinematic solutions with the same order of accuracy as the ones estimated by the high-class NICE and SOPH stations. Indeed, short-term repeatabilities from the daily static solution are ∼1 and ∼4 mm for the horizontal and vertical components at SEPT, GPS constellation solution, which are compatibles with long-term repeatability values reported in local and regional continuous high-class GNSS networks. On the contrary, although the low-cost UBLO station (u-blox ZED-F9P receiver) shows repeatability values a little higher than those at NICE, SEPT, and SOPH for the daily static solution (GPS or GLONASS), the north and vertical components of their time series (Figure 6) undergo an increase of noise after few months of continuous recording. This pattern is also evidenced by the slight increase in power magnitudes in the power spectral density plots of Figure 8. The study of Tunini et al. [7], based on daily position solutions for a time window of ∼5 months, reported a few mm accuracy decrease at all position components (NEU) for the u-blox ZED-F9P receiver relative to the accuracy retrieved in the Topcom and Leica high-class receivers. A similar result is also observed in Hanza et al. [6] in which daily position solutions at the same geodetic marker indicated ∼5 mm differences between the u-blox ZED-F9P receiver and the high-class Leica receiver. Our results for the u-blox ZED-F9P (UBLO) are therefore in agreement with previous findings.
Regarding the kinematic solutions in post-processing or real-time mode, repeatability values from the low-cost SEPT station are consistent with those computed for the high-class NICE and SOPH stations, supporting the robustness and stability of our GNSS prototype. Interestingly, the average accuracy retrieved at SEPT in real-time mode is ∼3 and ∼5 cm for the horizontal and vertical components, respectively. Such values are around one order of magnitude higher than those computed for its kinematic solution in post-processing mode (∼2 and ∼3 cm for the horizontal and vertical components) for a multi-GNSS solution (GER). This comparison, together with the results of static positioning, points to the low-cost SEPT station as a reliable instrument with the ability to record signals coming from surface deformation processes linked to slow slip events, volcanic unrest, landslides, etc. On the contrary, we identified some additional drawbacks in the performance of the UBLO station (u-blox ZED-F9P) when we were performing the data processing either in kinematic or static mode. The first constraint was related to the rejection of solving Galileo measurements by all the scientific software used in the current study. Furthermore, real-time analysis at UBLO frequently reported a decrease or the total loss of satellite tracking capacities for the GLONASS constellation and occasionally for the GPS, which seems to promote larger uncertainties in its real-time positioning solution (Figure 11). Although the kinematic solution for the GPS constellation at UBLO shows acceptable repeatability values relative to the other stations (NICE, SEPT, and SOPH), their GLONASS solution is the worst, as noted in the previous section (Figure 10). Recent studies (e.g., Wielgocka et al. [4], Hohensinn et al. [5], Hamza et al. [6], among others) have highlighted an adequate performance in the accuracy of the kinematic solution for the u-blox receiver. However, most of them reported a further degradation in the positioning accuracy for the kinematic or real-time modes (> 10 cm) even when their evaluations came from reduced short time windows (a few hours to a few days). Herein, we demonstrate the low-cost SEPT station largely improves the positioning accuracy retrieved by the low-cost UBLO station, based on continuous GNSS surveying for more than one year, making it suitable and a cost-efficient alternative for applications of long-term crustal deformation monitoring or offshore tsunami monitoring using commercial shipping fleets [31].
Turning our attention to hardware design, we notice that Septentrio’s company has recently launched a new Mosaic-X5 GNSS card (mosaic-go) as part of an evaluation phase. This compact card benefits from, among other features, data writing cycles through an external SD card memory, allowing to have the raw and RINEX data access directly at the same GNSS receiver. In addition, Ardusimple also offers a Septentrio Mosaic-X5 board (SimpleRTK3B) with an ethenet extension which offers push-FTP capabilities. Therefore, new products will simplify our original low-cost station design by excluding the Raspberry card, which also means a power consumption reduction. We are currently testing the performance of such a new low-cost GNSS card, and we expect to have similar results as those obtained for the SEPT station.
5. Conclusions
We assessed the accuracy and performance of an improved low-cost station (SEPT) by analyzing recorded GNSS measurements such as those performed for the scientific community at geodetic-class networks. Our results, therefore, support the low-cost station as a reliable instrument with the potential to be used to complement and obtain redundancy in the continuous surveying of slow motions resulting from volcanic deformation, crustal deformation, or tsunami monitoring where conventional high-class networks are sparse or difficult to maintain. Indeed, we have started deploying several low-cost stations in northern Peru and central Ecuador to improve GNSS surveying of long-term deformation associated to the subduction process. Our cost-efficient geodetic station integrates a dual frequency mosaic-X5 GNSS receiver, AS-ANT3BCAL antenna, raspberry card, and cellular modem. All-in-one, it can acquire satellite signals from the multi-GNSS constellation and transmit them for post- and real-time processing with a low power consumption (∼3.5 watts).
Daily static and kinematic positioning coming from the low-cost SEPT station show short-term repeatability values, over ∼1 year, quite similar to those obtained from the high-class geodetic stations (NICE and SOPH), supporting the accuracy and stability of the position solution of our proposed GNSS station. However, large daily position time series will allow us to re-evaluate their long-term accuracy in the forthcoming years, which is not expected to show significant variations. Our results also reveal that the low-cost UBLO station (u-blox F9P) reaches less well repeatabilities, the worst for the kinematic and real-time solutions, suggesting a degradation of their accuracy over time. Despite that drawback, we think the u-blox F9P card could be an option for applications where the millimeter or sub-millimeter accuracy is undesirable.
Daily static positioning solutions in post-processing mode do not clearly show an improvement in accuracy when including a multi-GNSS constellation solution (GPS, GLONASS, Galileo) but it does for the kinematic and real-time processing. Repeatabilities at randomly selected data for the multi-GNSS solutions (GE or GER, Figure 10) suggest an improvement of ∼1 cm for the horizontal components and ∼2 cm for the vertical. A further re-evaluation of multi-GNSS accuracy solutions, including an array of high-class and low-cost co-located stations, is intended to be done in upcoming studies.
Finally, the cost budget required by our low-cost SEPT station is ∼50% more expensive than suggested for the UBLO station (u-blox F9P: Table 1) but only ∼10% of the price of a high-class geodetic station. Such a budget supports good cost-effectiveness to achieve high positioning solution accuracy.
Author Contributions
Conceptualization, P.J., L.R., and M.V.; designed and software M.V.; data curation M.V., L.R., and P.J.; formal analysis, P.J.; validation, P.J., M.V., L.R., and J-M.N. ; writing—original draft preparation, P.J., L.R. and M.V.; writing—review and editing, P.J., L.R., M.V., J-M. N., M.V., and P.S. All authors have read and agreed to the submitted version of the manuscript.
Funding
This research received no external funding。
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
RINEX data are available online through the RENAG GNSS network repository (NICE, SOPH and SEPT, UBLO). Additional data related to this paper may be requested from the corresponding author. The developed software controlling all functionalities of our low-cost prototype is available on Gitlab at OCA.
Acknowledgments
We acknowledge support from the Agence Nationale de la Recherche (ANR) in the frame of the ANR-19-CE04-0003 ITEC project, support from the french space agency CNES (APR UV-TEC-GEOX project) and BQR OCA, as well as incentives from RENAG CNRS-INSU SNO and EPOS-France. P. Jarrin’s postdoctoral fellowship is funded by the ITEC project. We thank Olivier Laurain for fruitful discussions about the GINS software parameterization. We thank the RENAG GNSS network for providing valuable GNSS data. Rénag is a member of the Research Infrastructure (RI) EPOS-France, managed by CNRS-Insu. EPOS-France is inscribed on the roadmap of the Ministry of Higher Education, Research, and Innovation, the EPOS-France IR is a consortium of eighteen French research organizations and institutions. EPOS-France benefits from the support of the Ministry of Ecological Transition.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
We use the Weighted Residual Mean Square (WRMS) value from the residual time series to assess the accuracy of the position solutions [21].
where n is the number of positions, is the weighted average of the daily positions of or the value predicted by an evolution model, is the daily position variance of .
References
- Bock, Y.; Melgar, D. Physical applications of GPS geodesy: a review. Reports on Progress in Physics 2016, 79, 106801. [Google Scholar] [CrossRef] [PubMed]
- Nocquet, J.M.; Jarrin, P.; Vallée, M.; Mothes, P.A.; Grandin, R.; Rolandone, F.; Delouis, B.; Yepes, H.; Font, Y.; Fuentes, D.; Régnier, M.; Laurendeau, A.; Cisneros, D.; Hernandez, S.; Sladen, A.; Singaucho, J.C.; Mora, H.; Gomez, J.; Montes, L.; Charvis, P. Supercycle at the Ecuadorian subduction zone revealed after the 2016 Pedernales earthquake. Nature Geoscience 2016, 10, 145. [Google Scholar] [CrossRef]
- Ardusimple. Low-cost GNSS products, 2023.
- Wielgocka, N.; Hadas, T.; Kaczmarek, A.; Marut, G. Feasibility of Using Low-Cost Dual-Frequency GNSS Receivers for Land Surveying. Sensors 2021, 21. [Google Scholar] [CrossRef]
- Hohensinn, R.; Stauffer, R.; Glaner, M.F.; Herrera Pinzón, I.D.; Vuadens, E.; Rossi, Y.; Clinton, J.; Rothacher, M. Low-Cost GNSS and Real-Time PPP: Assessing the Precision of the u-blox ZED-F9P for Kinematic Monitoring Applications. Remote Sensing 2022, 14. [Google Scholar] [CrossRef]
- Hamza, V.; Stopar, B.; Sterle, O.; Pavlovčič-Prešeren, P. A Cost-Effective GNSS Solution for Continuous Monitoring of Landslides. Remote Sensing 2023, 15. [Google Scholar] [CrossRef]
- Tunini, L.; Zuliani, D.; Magrin, A. Applicability of Cost-Effective GNSS Sensors for Crustal Deformation Studies. Sensors 2022, 22. [Google Scholar] [CrossRef]
- US Department of Commerce, N. Antenna Calibrations.
- Curone, D.; Savarese, G.; Antonini, M.; Baucry, R.; Amani, E.; Boulandet, A.; Cataldo, M.; Chambon, P.; Chersich, M.; Hussein, A.B.; Menuel, B.; Tsaturyan, A. An Innovative Low-Power, Low-Cost, Multi-Constellation Geodetic-Grade Global Navigation Satellite System Reference Station for the Densification of Permanent Networks: The GREAT Project. Sensors 2023, 23. [Google Scholar] [CrossRef]
- RESIF. RESIF-RENAG French national Geodetic Network - Réseau Sismologique et géodésique Français, 2017. [CrossRef]
- Vaclavovic, P.; Dousa, J. G-Nut/Anubis: Open-Source Tool for Multi-GNSS Data Monitoring with a Multipath Detection for New Signals, Frequencies and Constellations. In IAG 150 Years; Rizos, C., Willis, P., Eds.; Springer International Publishing: Cham, 2015; Vol. 143, pp. 775–782. [Google Scholar] [CrossRef]
- Krietemeyer, A.; van der Marel, H.; van de Giesen, N.; ten Veldhuis, M.C. A Field Calibration Solution to Achieve High-Grade-Level Performance for Low-Cost Dual-Frequency GNSS Receiver and Antennas. Sensors 2022, 22. [Google Scholar] [CrossRef]
- Blewitt, G.; Hammond, W.; Kreemer, C. Harnessing the GPS Data Explosion for Interdisciplinary Science. Eos 2018, 99. [Google Scholar] [CrossRef]
- Herring, T.A.; Floyd, M.A.; King, R.W.; McClusky, S.C. Global Kalman filter VLBI and GPS analysis program Release 10.6. Technical report, MIT, MIT, 2015.
- Herring, T.A.; King, R.W.; Floyd, M.A.; McClusky, S.C. GPS Analysis at MIT Release 10.7. Technical Report Release 10.7, MIT, MIT, 2018.
- Boehm, J.; Werl, B.; Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data. Journal of Geophysical Research: Solid Earth 2006, 111. [Google Scholar] [CrossRef]
- Jarrin, P.; Nocquet, J.M.; Rolandone, F.; Mora-Páez, H.; Mothes, P.; Cisneros, D. Current motion and deformation of the Nazca Plate: new constraints from GPS measurements. Geophysical Journal International 2022, 232, 842–863. [Google Scholar] [CrossRef]
- Noll, C.E. The crustal dynamics data information system: A resource to support scientific analysis using space geodesy. Advances in Space Research 2010, 45, 1421–1440. [Google Scholar] [CrossRef]
- Prange, L.; Villiger, A.; Sidorov, D.; Schaer, S.; Beutler, G.; Dach, R.; Jäggi, A. Overview of CODE’s MGEX solution with the focus on Galileo. Advances in Space Research 2020, 66, 2786–2798. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Métivier, L.; Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. Journal of Geophysical Research: Solid Earth 2016, 121, 6109–6131. [Google Scholar] [CrossRef]
- Blewitt, G. Carrier phase ambiguity resolution for the Global Positioning System applied to geodetic baselines up to 2000 km. Journal of Geophysical Research: Solid Earth 1989, 94, 10187–10203. [Google Scholar] [CrossRef]
- Marty, J.C.; Loyer, S.; Perosanz, F.; Mercier, F.; Bracher, G.; Legrésy, B.; Portier, L.; Capdeville, H.; Lemoine, J.M.; Biancale, R. GINS: THE CNES/GRGS GNSS SCIENTIFIC SOFTWARE. 2011.
- Loyer, S.; Perosanz, F.; Mercier, F.; Capdeville, H.; Marty, J.C. Zero-difference GPS ambiguity resolution at CNES–CLS IGS Analysis Center. Journal of Geodesy 2012, 86, 991–1003. [Google Scholar] [CrossRef]
- Griffiths, J. Combined orbits and clocks from IGS second reprocessing. Journal of Geodesy 2019, 93, 177–195. [Google Scholar] [CrossRef]
- Williams, S.D.P. CATS: GPS coordinate time series analysis software. GPS Solutions 2008, 12, 147–153. [Google Scholar] [CrossRef]
- Twardzik, C.; Vergnolle, M.; Sladen, A.; Avallone, A. Unravelling the contribution of early postseismic deformation using sub-daily GNSS positioning. Scientific Reports 2019, 9, 1775. [Google Scholar] [CrossRef]
- Tsang, L.L.; Vergnolle, M.; Twardzik, C.; Sladen, A.; Nocquet, J.M.; Rolandone, F.; Agurto-Detzel, H.; Cavalié, O.; Jarrin, P.; Mothes, P. Imaging rapid early afterslip of the 2016 Pedernales earthquake, Ecuador. Earth and Planetary Science Letters 2019, 524, 115724. [Google Scholar] [CrossRef]
- Chupin, C.; Ballu, V.; Testut, L.; Tranchant, Y.T.; Calzas, M.; Poirier, E.; Coulombier, T.; Laurain, O.; Bonnefond, P.; FOAM Project, T. Mapping Sea Surface Height Using New Concepts of Kinematic GNSS Instruments. Remote Sensing 2020, 12. [Google Scholar] [CrossRef]
- Crowell, B.; Schmidt, D.; Bodin, P.; Vidale, J.; Gomberg, J.S.; Hartog, J.R.; Kress, V.; Melbourne, T.; Santillian, M.; Minson, S.E.; Jamison, D. Demonstration of the Cascadia G-FAST geodetic earthquake early warning system for the Nisqually, Washington, earthquake. Seismological Research Letters 2016, 87, 930–943. [Google Scholar] [CrossRef]
- Mervart, L.; Weber, G.; Stürze, A.; Stöcker, D. BKG Ntrip Client - BNC, 2023.
- Foster, J.H.; Brooks, B.A.; Wang, D.; Carter, G.S.; Merrifield, M.A. Improving tsunami warning using commercial ships. Geophysical Research Letters 2012, 39. [Google Scholar] [CrossRef]
Figure 1.
Ground-based GNSS field set-up using the Septentrio MOSAIC X5 receiver board in Briançonnet city in southern France, located ∼35km from the SOPH station. The left panel shows the in-house all-in-one dual-frequency low-cost receiver, while the right panel shows the antenna monument, anchored into bedrock, and the solar panel photovoltaic system.
Figure 1.
Ground-based GNSS field set-up using the Septentrio MOSAIC X5 receiver board in Briançonnet city in southern France, located ∼35km from the SOPH station. The left panel shows the in-house all-in-one dual-frequency low-cost receiver, while the right panel shows the antenna monument, anchored into bedrock, and the solar panel photovoltaic system.
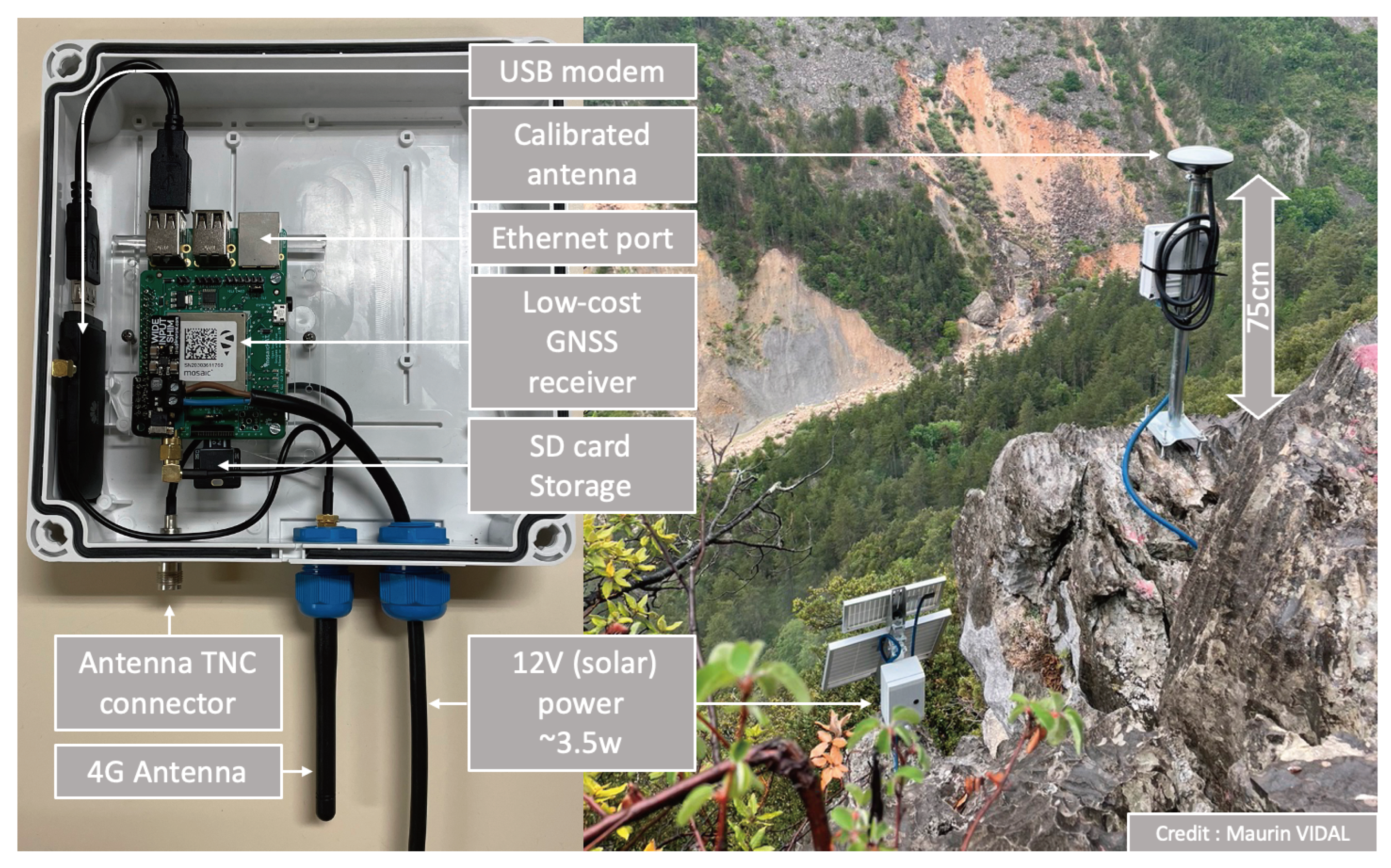
Figure 3.
Satellite tracking evaluation regarding the number of daily GNSS observations above the horizon retrieved by the SEPT, UBLO, SOPH, and NICE stations. The light pink vertical stripe depicts the time interval where, for most days, GNSS observations of the UBLO station decrease by ∼20%.
Figure 3.
Satellite tracking evaluation regarding the number of daily GNSS observations above the horizon retrieved by the SEPT, UBLO, SOPH, and NICE stations. The light pink vertical stripe depicts the time interval where, for most days, GNSS observations of the UBLO station decrease by ∼20%.
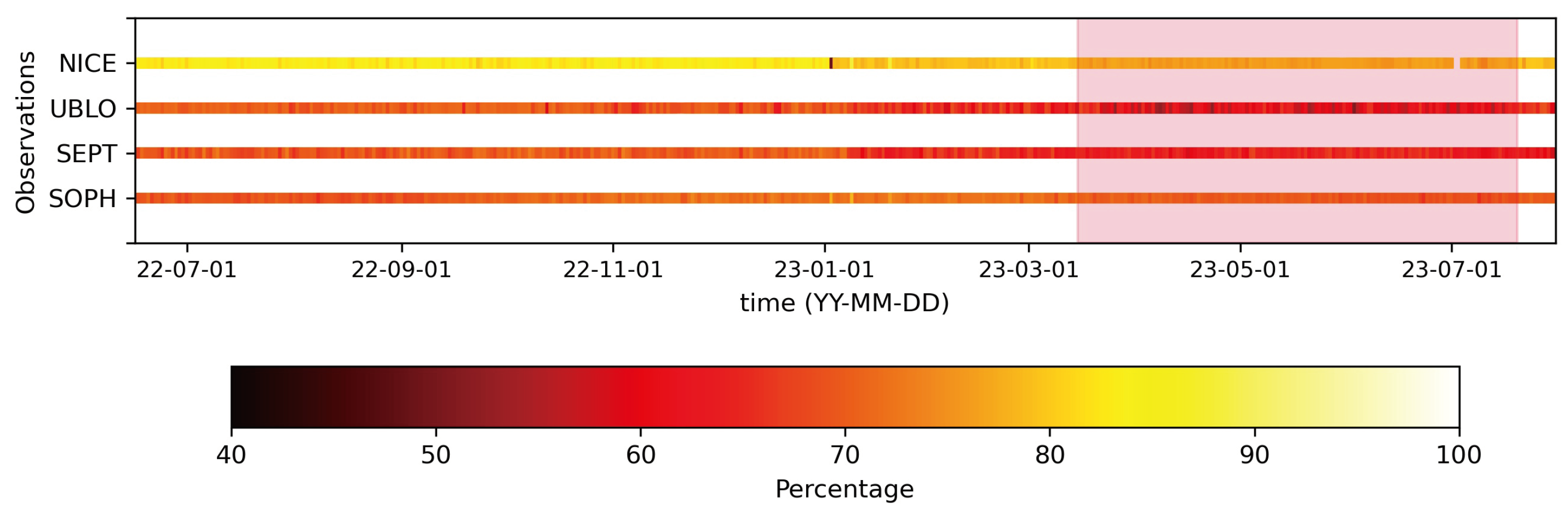
Figure 4.
Daily cycle slip values estimated at the SEPT, UBLO, and SOPH sites for the GPS and GLONASS constellations (SEPT and UBLO shared antenna is 5 m apart from SOPH antenna, Table 1). In order to assess the quality of the low-cost stations for the Galileo and BeiDou constellations, we have also included the NICE station, located 20 km away, in the comparison. BeiDou GNSS observations on the NICE site started after the last receiver replacement on March, 2023.
Figure 4.
Daily cycle slip values estimated at the SEPT, UBLO, and SOPH sites for the GPS and GLONASS constellations (SEPT and UBLO shared antenna is 5 m apart from SOPH antenna, Table 1). In order to assess the quality of the low-cost stations for the Galileo and BeiDou constellations, we have also included the NICE station, located 20 km away, in the comparison. BeiDou GNSS observations on the NICE site started after the last receiver replacement on March, 2023.
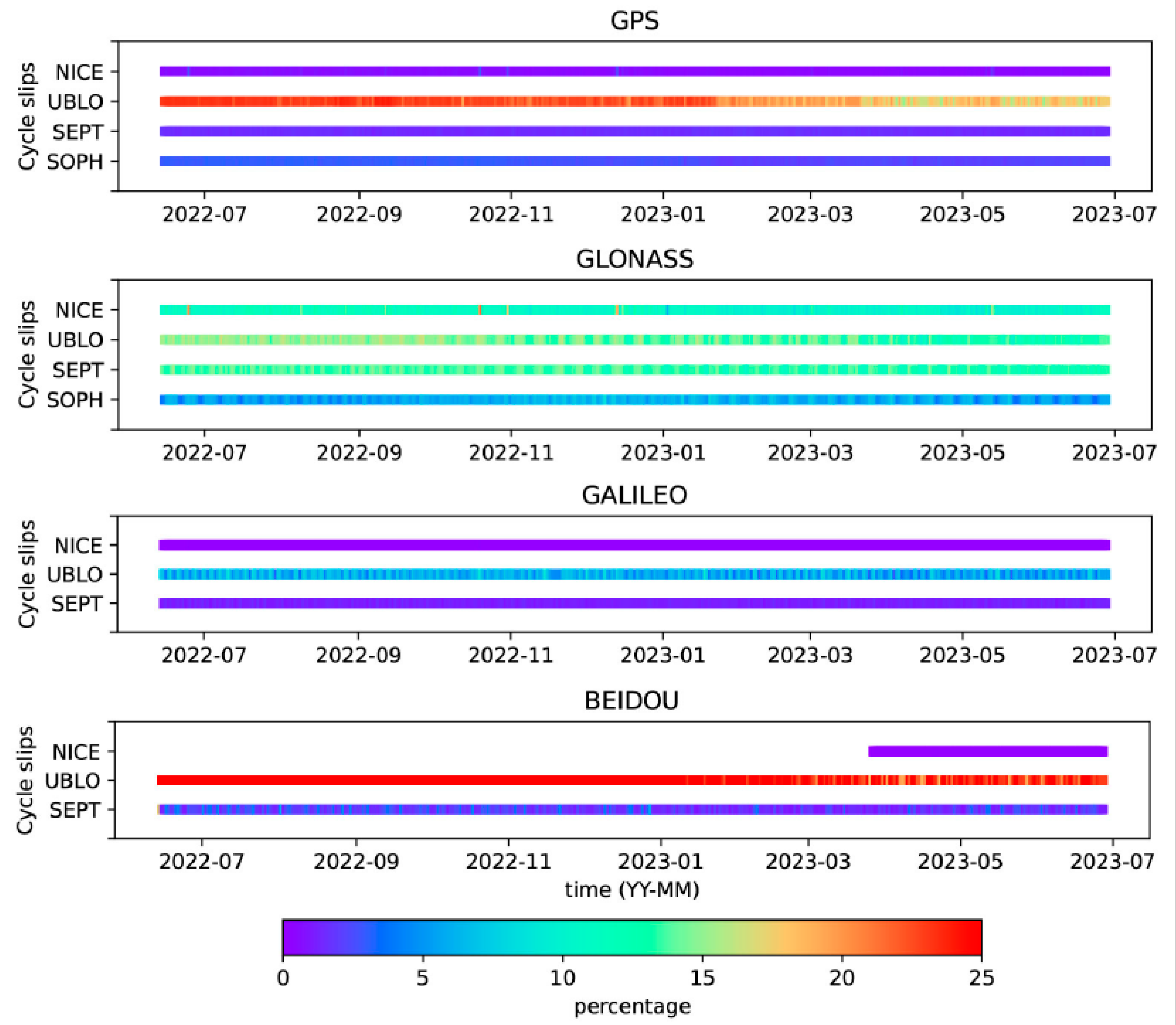
Figure 5.
Daily multipath error computed for the L2 (GPS and GLONASS) and L7 (Galileo) frequencies at the SEPT, UBLO, and SOPH stations. In order to assess the quality of the Low-cost sites for the Galileo and BeiDou constellations, we have included the NICE station in the comparison. BeiDou GNSS observations on the NICE site started after the last receiver replacement on March, 2023. Multipath values are in centimeters.
Figure 5.
Daily multipath error computed for the L2 (GPS and GLONASS) and L7 (Galileo) frequencies at the SEPT, UBLO, and SOPH stations. In order to assess the quality of the Low-cost sites for the Galileo and BeiDou constellations, we have included the NICE station in the comparison. BeiDou GNSS observations on the NICE site started after the last receiver replacement on March, 2023. Multipath values are in centimeters.
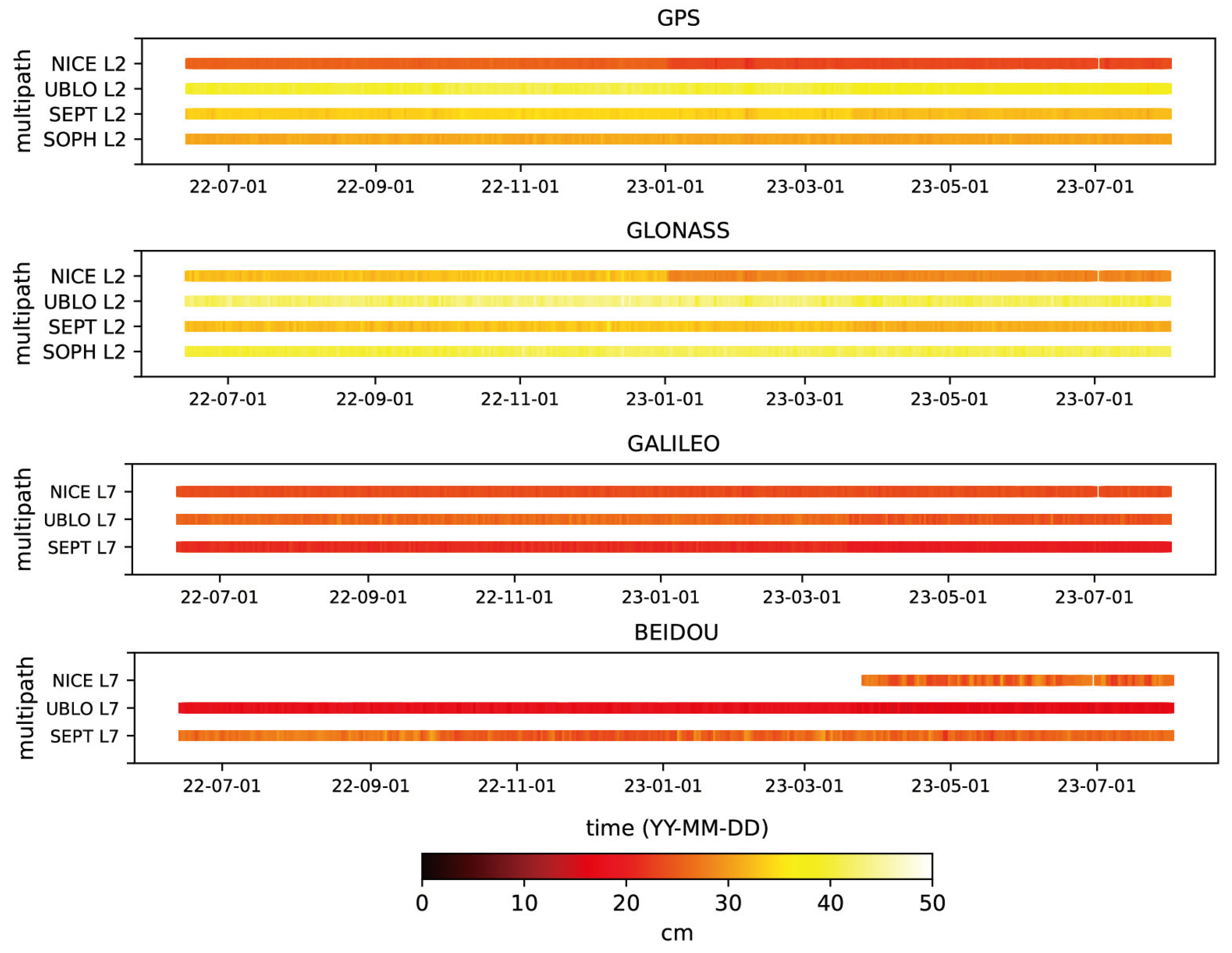
Figure 6.
Detrended daily position time-series with associated uncertainties (gray bars) for the SEPT, UBLO, SOPH, and NICE GNSS sites using Gamit-Globk software. Time series are therefore solutions for the GPS constellation.
Figure 6.
Detrended daily position time-series with associated uncertainties (gray bars) for the SEPT, UBLO, SOPH, and NICE GNSS sites using Gamit-Globk software. Time series are therefore solutions for the GPS constellation.
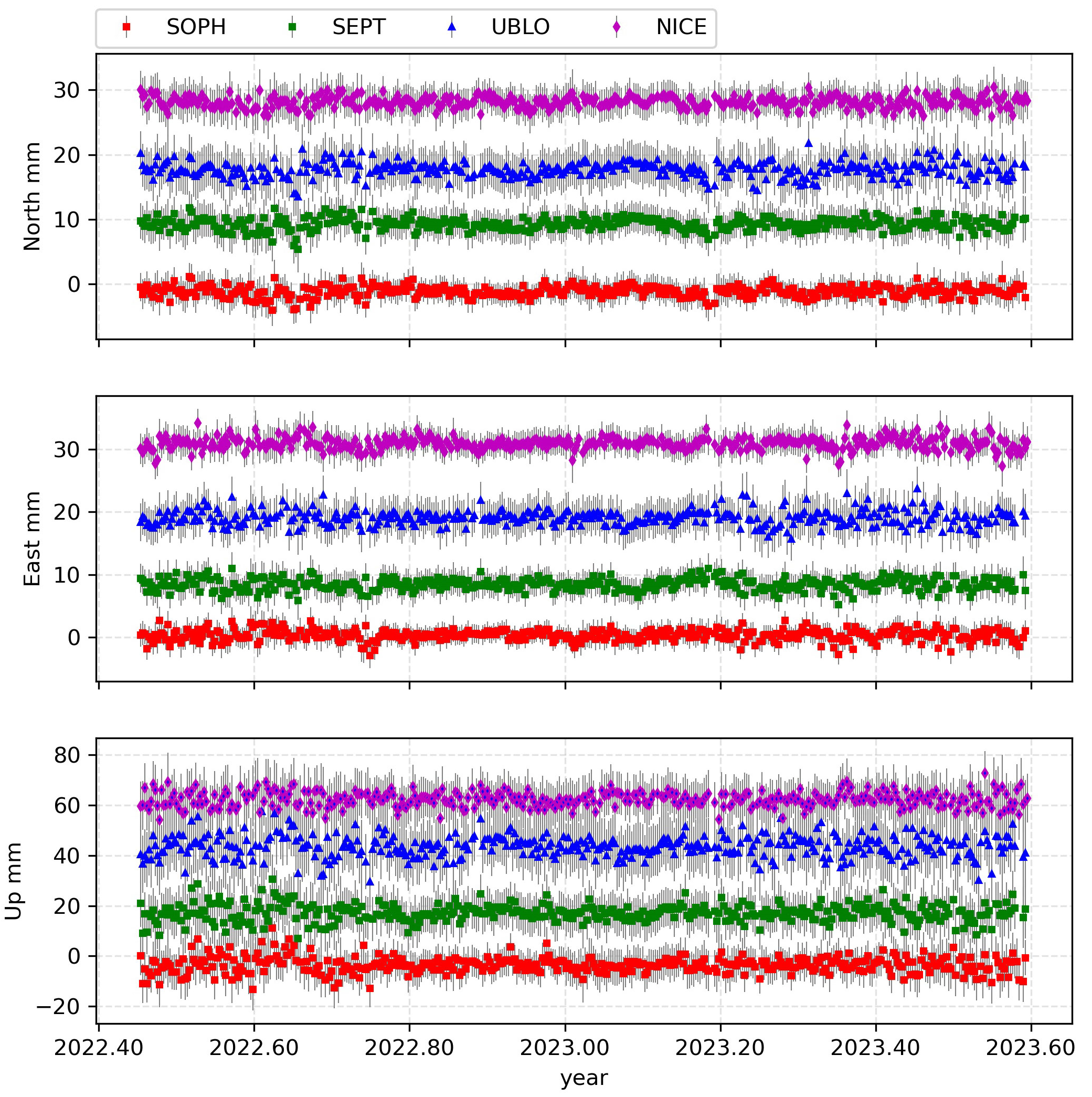
Figure 7.
Repeatability (WRMS) computed from daily residual positions for the GNSS processing in the static mode. The x-axis depicts the GNSS solution according to the selected constellation. G: GPS, R: GLONASS, E: Galileo, GR: GPS-GLONASS, GE: GPS-Galileo, GRE: GPS-GLONASS-Galileo.
Figure 7.
Repeatability (WRMS) computed from daily residual positions for the GNSS processing in the static mode. The x-axis depicts the GNSS solution according to the selected constellation. G: GPS, R: GLONASS, E: Galileo, GR: GPS-GLONASS, GE: GPS-Galileo, GRE: GPS-GLONASS-Galileo.
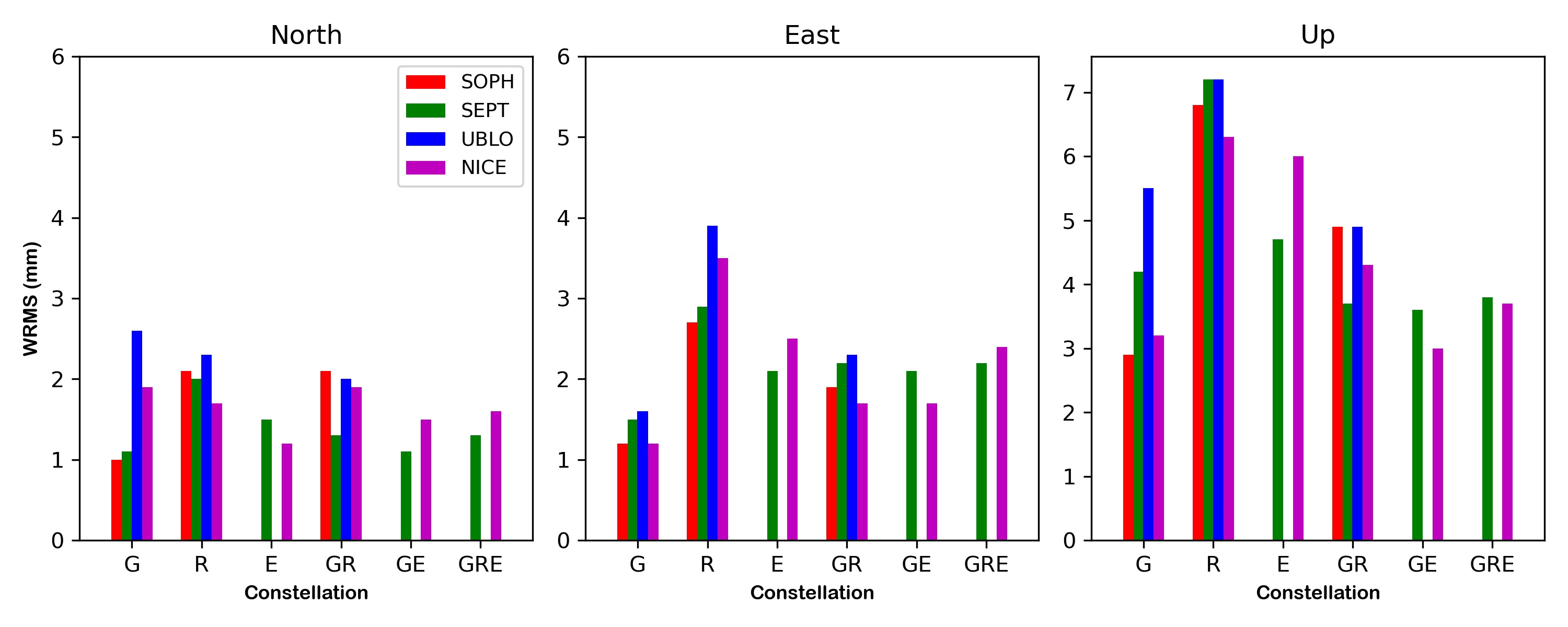
Figure 8.
Power Spectral Densities (PSD) for the NICE, SOPH, SEPT and UBLO GNSS sites. PSD are computed for the GPS, GLONASS, and Galileo constellations using the CATS software [25]. cpy: cycles per year.
Figure 8.
Power Spectral Densities (PSD) for the NICE, SOPH, SEPT and UBLO GNSS sites. PSD are computed for the GPS, GLONASS, and Galileo constellations using the CATS software [25]. cpy: cycles per year.
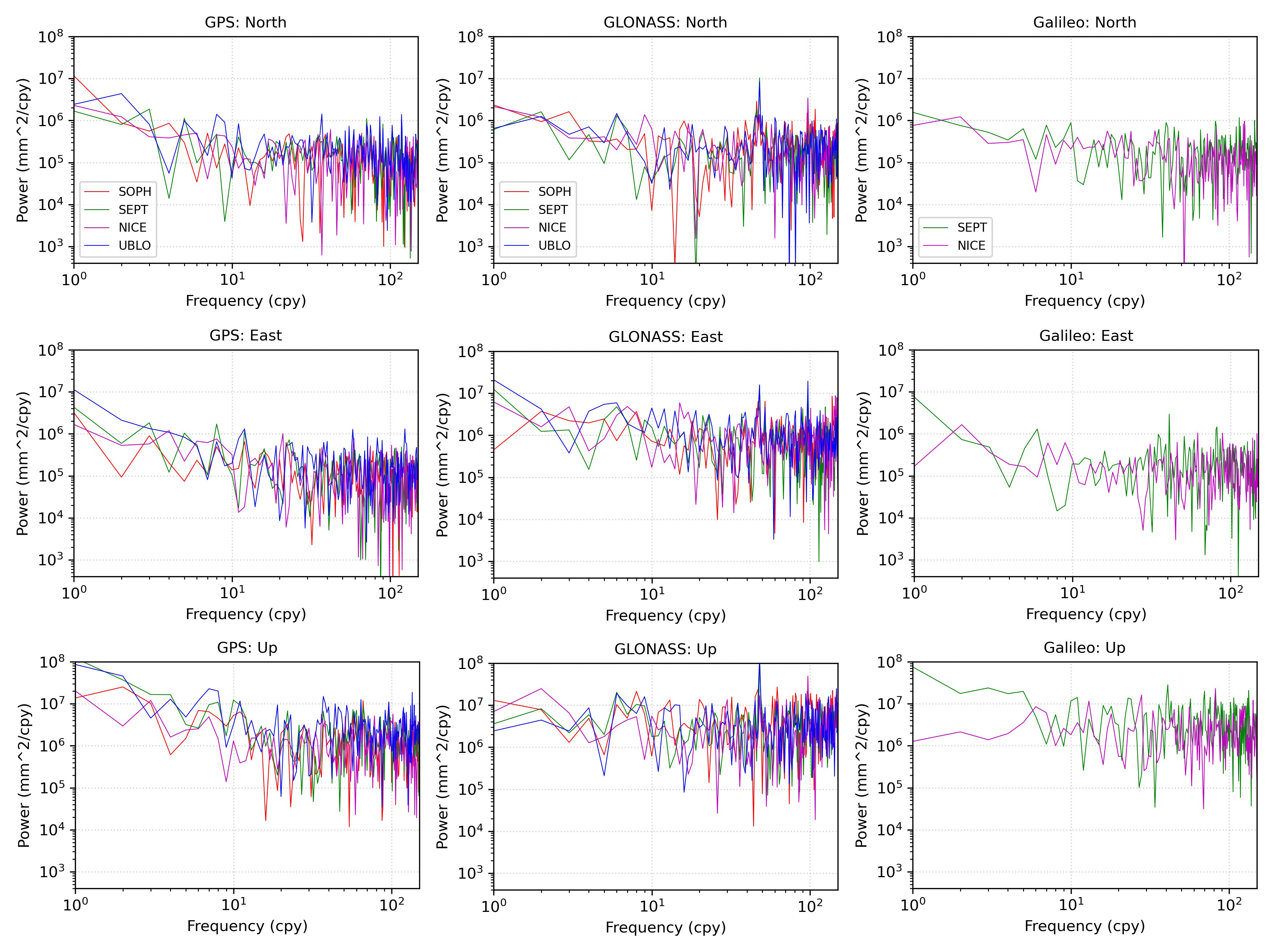
Figure 9.
Kinematic displacement for the 1-second sampling rate at the NICE, SEPT, SOPH, and UBLO sites on July 23, 2023. A, B, and C panels depict the kinematic displacements for the GPS constellation. Detrended traces have been shifted to avoid overlap. Light pink vertical stripes within the left panels indicate the displacement gaps at the UBLO site. D, E, and F are the power spectral densities (PSD) estimated from the detrended kinematic displacements at NICE, SEPT, SOPH, and UBLO. G) Number of available satellites tracked by geodetic receivers from GPS observations at a 1-second sampling rate.
Figure 9.
Kinematic displacement for the 1-second sampling rate at the NICE, SEPT, SOPH, and UBLO sites on July 23, 2023. A, B, and C panels depict the kinematic displacements for the GPS constellation. Detrended traces have been shifted to avoid overlap. Light pink vertical stripes within the left panels indicate the displacement gaps at the UBLO site. D, E, and F are the power spectral densities (PSD) estimated from the detrended kinematic displacements at NICE, SEPT, SOPH, and UBLO. G) Number of available satellites tracked by geodetic receivers from GPS observations at a 1-second sampling rate.
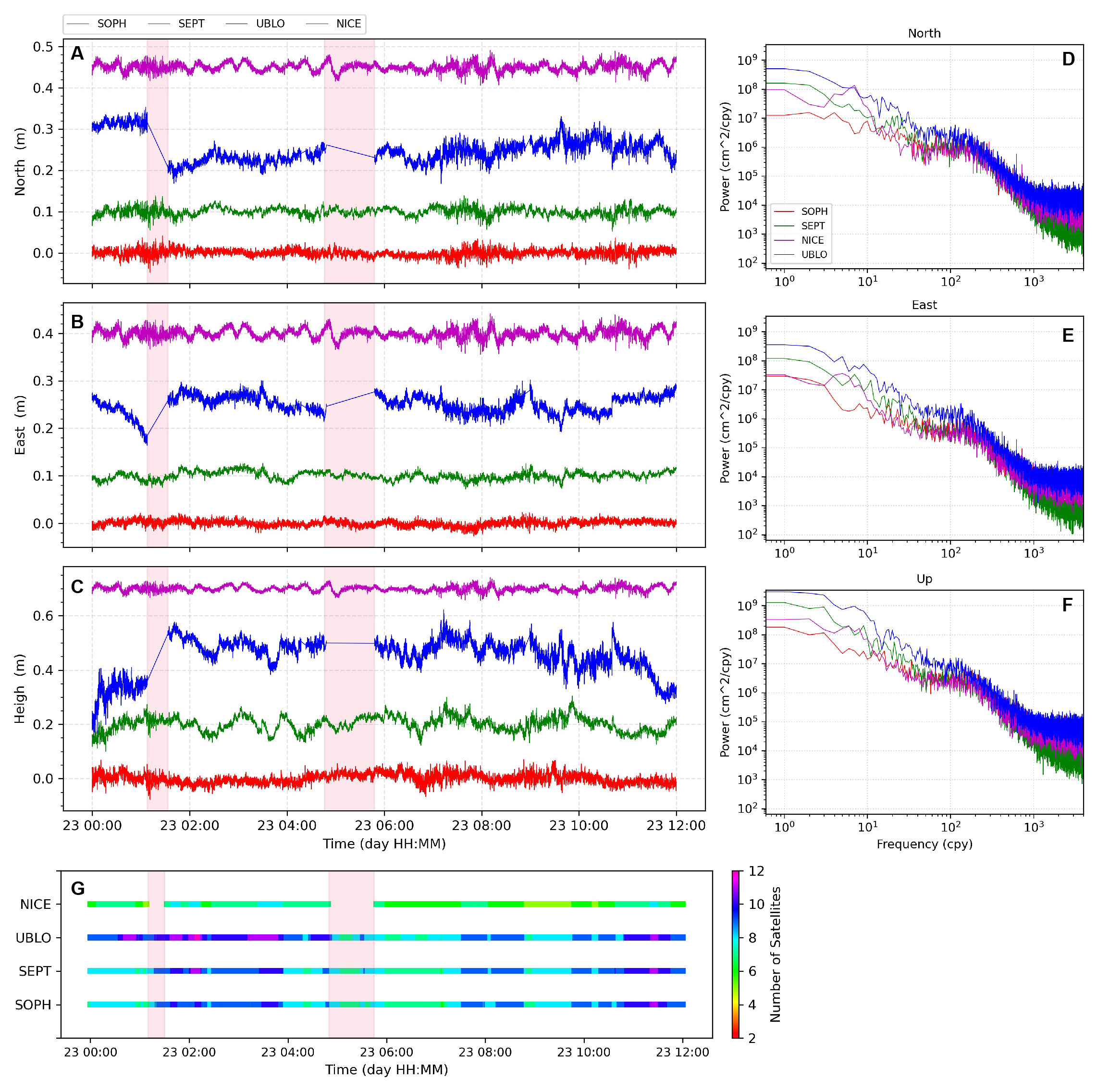
Figure 10.
Repeatability (WRMS) computed from residual positions randomly selected (1 day par month) for the GNSS kinematic processing. The x-axis depicts the GNSS solution according to the selected constellation. G: GPS, R: GLONASS, E: Galileo, GR: GPS-GLONASS, GE:GPS-Galileo, GRE: GPS-GLONASS-Galileo
Figure 10.
Repeatability (WRMS) computed from residual positions randomly selected (1 day par month) for the GNSS kinematic processing. The x-axis depicts the GNSS solution according to the selected constellation. G: GPS, R: GLONASS, E: Galileo, GR: GPS-GLONASS, GE:GPS-Galileo, GRE: GPS-GLONASS-Galileo
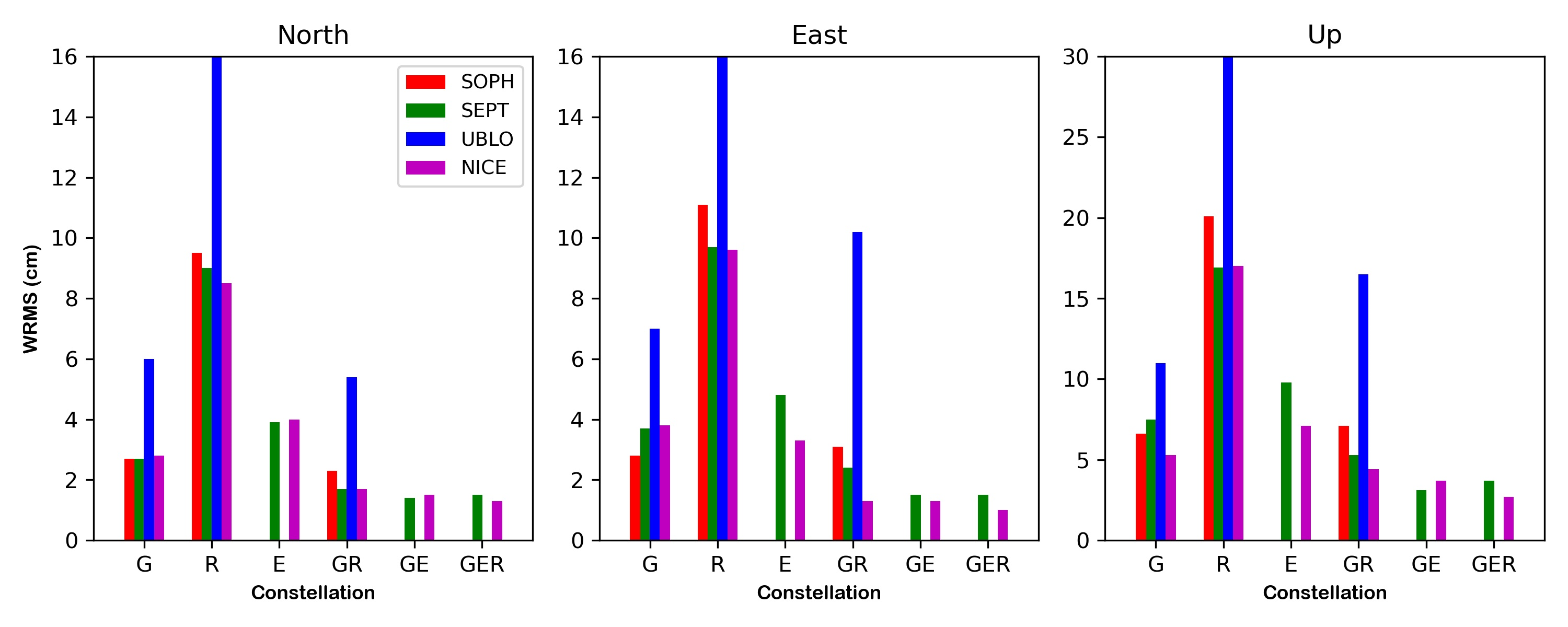
Figure 11.
Kinematic displacements from the real-time analysis at the SOPH, SEPT, NICE, and UBLO stations for the North (A), East (B), and Vertical (C) components on September 27, 2023. D) Number of available satellites tracked by geodetic receivers from GNSS observations at a 1-second sampling rate. For visualization purposes, displacements greater than 0.8 m in the UBLO solution are not shown in the comparison. Light pink vertical stripes depict gaps in the kinematic solution and the loss of satellite tracking capacities of the UBLO receiver.
Figure 11.
Kinematic displacements from the real-time analysis at the SOPH, SEPT, NICE, and UBLO stations for the North (A), East (B), and Vertical (C) components on September 27, 2023. D) Number of available satellites tracked by geodetic receivers from GNSS observations at a 1-second sampling rate. For visualization purposes, displacements greater than 0.8 m in the UBLO solution are not shown in the comparison. Light pink vertical stripes depict gaps in the kinematic solution and the loss of satellite tracking capacities of the UBLO receiver.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



