
Submitted:
23 February 2024
Posted:
26 February 2024
You are already at the latest version
Abstract
The Standard Model is not a complete description of reality; it omits the existence of dark matter, dark energy, and an explanation as to why no CP violation has been observed. However, some of these phenomena could be explained through a new force mediated by a new boson. If such a boson were massless it would result in a power law potential and if massive the interaction would be Yukawa-like. A previous experiment employing a micro-mechanical oscillator and a spherical test mass interactions was successful in placing the best limits on a mass-mass Yukawa-like interaction, but the data was never analyzed in the context of a power law. Here that data is analyzed considering a power law for powers n = 1-5 where n is the number of boson exchanges. The results show that the limits obtained through power law analysis of this data are not better than the currently accepted limits. A discussion of an experiment design capable of producing better limits on power law extensions to the Standard Model is presented, and suggests micro mechanical oscillators based experiment remains capable of improving the limits by at least one order of magnitude.
Keywords:
hypothetical interactions
; power-type potentials
; constraints on hypothetical particles
1. Introduction
The success of the Standard Model (SM) in describing matter and interactions cannot be over stated, but it is not a complete description: it does not explain dark matter and dark energy [1], it predicts CP violations in the strong force which have not yet been observed [1,2,3], and there is no quantized description of gravity [1]. This incompleteness has lead to many theories to fill the gaps of the SM.
One such approach is hypothesizing an interaction mediated by an as of yet undiscovered boson [4,5]. If the hypothetical boson is massive it leads to Yukawa-like interactions [6], but if it is massless the interaction will be parameterized with a power law [7]. This power law is typically written as a correction to Newtonian gravity, and for two point masses is expressed as
where G is Newton’s gravitational constant, and are point masses separated by a distance r, is the strength of the correction relative to gravity for a particular power of n, and is a constant used to preserve the dimension of the interaction; in this work m [8].
Previous experiments to probe both power law and Yukawa-like deviations in Newtonian gravity [8,9,10]. One experiment to probe hypothetical Yukawa-like interactions was carried out in 2016 [11]. The Yukawa-like interaction is of the form
was probed and placed the best limits on for a range of nm, where is the strength of the correction and is the Compton wavelength of a massive hypothetical boson [11]. The experiment consisted of a spherical test mass attached to micro-mechanical oscillator, which was brought within 200 nm of a source mass of Au-Si sector and the force was measured between the two masses. The set up was not designed to probe power law extensions of the SM and was expected to not be sensitive enough to improve those limits. However, a reanalysis of the force measurements from [11] and a full analysis with the data was never carried out in the context of a power law.
Power law models are not explicitly mentioned in the pursuit of experimental evidence of dark matter [12,13,14,15,16,17,18,19]. This work does a full analysis considering power law extensions of the SM on the force measurements in [11] as well as on new data. The limits obtained are not an improvement over the current best limits [8,10], so we discuss what would need to be done for the approach in [11] to improve limits on power law extensions to the SM.
2. Materials and Methods
The study published in 2016 [11] used a differential force measurement technique between a spherical test mass attached to a micro-mechanical oscillator and a source mass. The test mass was a sphere composed of 3 layers; a central sapphire core with a 149.3 ± 0.2 m radius covered by 10 nm of Cr followed by 250 nm of Au (see Figure 1 for a cross sectional diagram of the test and source mass). The sphere was glued to a 500 × 500 m micro-mechanical oscillator and the system had a quality factor Q ∼ 7200. The deflection of the test mass was measured through a change in capacitance between the oscillator’s plate and electrodes located below the plate.
The source mass was a layered structure of BK7 Schott glass followed by a 2.10 ± 0.02 m layer of alternating sectors of Au and Si. Both Au and Si sectors shared a common layer of a 10 ± 1 nm Cr wetting layer on top of which was a 150 nm Au layer covering the sample. The shared top Au layer thickness was chosen to be larger than the effective penetration depth of the Casimir force. In this way the contribution due to the Casimir force is the same whether the test mass is located over a Si sector or a Au sector and leads to a Casimir-less measuring technique as described in [20]. The test mass was brought to within 200 nm of the source mass’s surface and at this separation the minimum detectable force is 12 fN/. The source mass was rotated so that the sectors alternated under the test mass at the oscillator’s resonant frequency. Doing so makes the experiment select the first harmonic of the force commensurate with the period of the samples.
While the source masses used to set limits on the Yukawa-like interaction [11] had upwards of 300 Au-Si sectors, there were source masses that had two, 1 mm wide, sectors of alternating gold and silicon, as depicted in Figure 2. One sample had an inner radius of 2.5 mm and the other had an inner radius of 5 mm. The layered structure is the same as the 300 sector samples except the wetting layer is Ti. The data taken with these larger source masses were previously not analyzed.
To extract limits on , the force due to the potential expressed in Eq. 1 was calculated by integrating over the experimental geometry. First, the interaction between a spherical test mass and an arbitrary point in the source mass was calculated analytically with a coordinate system centered at the sphere, shown as the unprimed coordinate system in Figure 3, using spherical coordinates () where and are the polar and azimuthal angle respectively. The potential energy between the sphere and the source mass is
where R is the radius of the sphere, and are the densities of the sphere and the point respectively, is the distance from the center of the sphere to the arbitrary point in the source mass and is the differential volume of the source mass, see Appendix A for details. It was verified that Eq. 3 does not diverge for 2, 3, and 4 by taking the limit of Eq. 3 as 2, 3, and 4 respectively, these limits can be seen in Appendix A. The integrals over the source mass were carried out using cylindrical coordinates (, , ) in the primed coordinate system, see Figure 3, centered in the middle of the source mass. In the primed coordinate system
where is the radial variable integrated between the inner and outer radius of the sample, is the angular extent of the sample, is the radial distance to the sphere, is the angular postion of the sphere, is the vertical position of the center of the sphere, and is the vertical coordinate integrated over the thickness of the sample.
The experiment is only sensitive to forces in the vertical direction, normally calculating the force in the z direction would be done by
where is the differential force in the vertical direction that needs to be integrated over the geometry of the source mass. However, since Eq. 5 needs to be integrated along doing the derivative explicitly can be avoided because the operations are the inverse of each other; meaning the integral of Eq. 5 over the source mass in z is simply the difference of Eq. 3 evaluated at the integration limits of the source mass, and .
where is the area element of the source mass which remains to be integrated. A polar coordinate system centered at the center of the sample, the primed coordinate system in Figure 3, is used for the last two integrals. The area element is expressed as where (, ) are the polar coordinates in the primed system. The integrals over and were done numerically with Python code using SciPy packages [21].
In order to get the correct interaction from the layered geometry, the numerical integrations were carried out three times, once for each of the the three different layers of the test mass. Each test mass layer was considered to be a solid sphere with corresponding radii of 149.30 m, 149.31 m, and 149.56 m for sapphire, Cr, and Au respectively. As an example for n = 3 the integrations for each layer are
Equations 7,8 and 9 are the integrals over the source mass geometry carried out after the limit of Eq. 3 was taken as 3, where and are Eq. 4 evaluated at and respectively. The integrals for the other powers were done in the same manner. Once the integrals for each test mass layer is carried out, the total force due to the layered structure of the source mass and test mass (Figure 1) is
where , , , and are the densities of Au, Cr, sapphire, and Si respectively, indicates the total force in the z-direction for the power , and the factor out front, , accounts for the difference when the sphere is over a Au or Si in the source mass. Further more, since the first two layers are a shared layer of Au and Cr, the contributions of these layers to the interaction gets subtracted out.
The total force was calculated with the test mass at different angular positions (), Figure 4. The amplitude of the first harmonic for a particular power, , of the force commensurate with the period, , of the sectors was equated to the error bars of the force measurements.
The error bar value is fN at a separation of 300 nm, as shown in Figure 5. Equating the calculated first harmonic of the force to the experimental error bar allows limits on to be extracted.
3. Results
The limits presented in Table 1 were calculated using results from an experiment that was not designed to probe power law extensions to the SM. If the source masses were designed with a power law in mind, however, the limits could be further improved. Figure 6 shows the potential limits for as a function of the sample’s radial extent () for a thickness of 2 mm. The limits have a similar functional dependence with the other dimensions of the sample as the radius increases. The improvement is attributed to the larger volume of interaction improving the sensitivity of the measurement yielding better limits. However, the improvement gained in the limits by increasing the source mass’s volume quickly diminishes.
Changing the test mass to also have a larger volume of interaction could provide a small improvement on power law limits. Considering a system, like the one proposed in [22], where the test mass is cylindrical and carrying out a similar analysis as described above with a new test mass, the expected limits using a cylindrical test mass can be calculated. The details of the calculation can be found in Appendix B. The following is the expression of the force between a cylindrical test mass and an infinite slab with thickness mm along the vertical direction
where , , and m the length of the cylinder. The expected limits for the powers n = using a cylindrical test mass are listed in Table 2 calculate with the separation nm. Only the power is expected to improve by about an order of magnitude using a cylinder.
4. Conclusions
While these types of mechanical measurements have a high precision even at separations ∼200 nm, this work shows that the size of the masses limit the sensitivity when probing power law interactions. The limit on , reported here to be , is expected to improved about an order of magnitude over the best current limits [8] by designing the experiment for power law extensions to Newtonian gravity. Improving the limits of power law extensions to gravity is a challenging endeavor and new methods are needed to continue to make improvements on short range interaction experiments. Several experimental approaches are being developed to test gravity at short distances, seeking signs of deviations potentially due to dark matter effects [12,13,14,15,16,17,18,19]. The description of these new approaches does not explicitly state probing power law extensions to the SM. Researcher should evaluate whether these new techniques are equally suited to test power law models as well as Yukawa-like interactions, which could result in a larger selection of theories being ruled out.
Appendix A. Detailed Calculation Method for Sphere Test Mass Geometry
Equation A1 is the differential potential that needs to be integrated to calculate the interaction between the test mass and the source mass, where G is Newton’s gravitaional constant, () is the density of the test mass (source mass), is the strength of the correction for a particular power n, is a constant used to preserve the dimension, () is the test mass (source mass) volume element, and r is the distance between a point in the test mass and a point in the source mass and is expressed as
Where is the radial coordinate of a point in the sphere and has integration limits from zero to the radius of the sphere, is the polar coordinate of the sphere, and is the distance from the center of the spherical test mass to an arbitrary point in the source mass. We use spherical coordinates to integrate the test mass so the test mass volume element is expressed as
The integral over the test mass is carried out as follows
Nothing in Eq. A4 depends on azimuthal angle, , so the integral over results in a factor of .
Using the following change of variables: and , Eq. A5 is now
and carrying out the last two integrals for the test mass, we are left with potential between the sphere and an arbitrary point in the source mass.
For n = 2, 3, and 4 Eq. A7 yields ; as such it needs to be verified that it does not diverge by taking the limits as 2, 3, and 4. Taking the limit of Eq. A7
and using l’Hôptial’s rule to evaluate A8 results in

Appendix B. Detailed Calculation Method for Cylinder Test Mass Geometry
The starting point to calculate the interaction between an infinite slab and a cylinder is potential
The procedure to integrate the cylinder-slab geometry is the following
- integrate over the source mass
- calculate the field due to the source mass, , along the
- calculate the force, , where is the mass of the test mass calculated
is the density of the test mass and is the volume element of the test mass. The coordinate system used for integrating the infinite slab-cylinder geometry is shown in Figure A1.
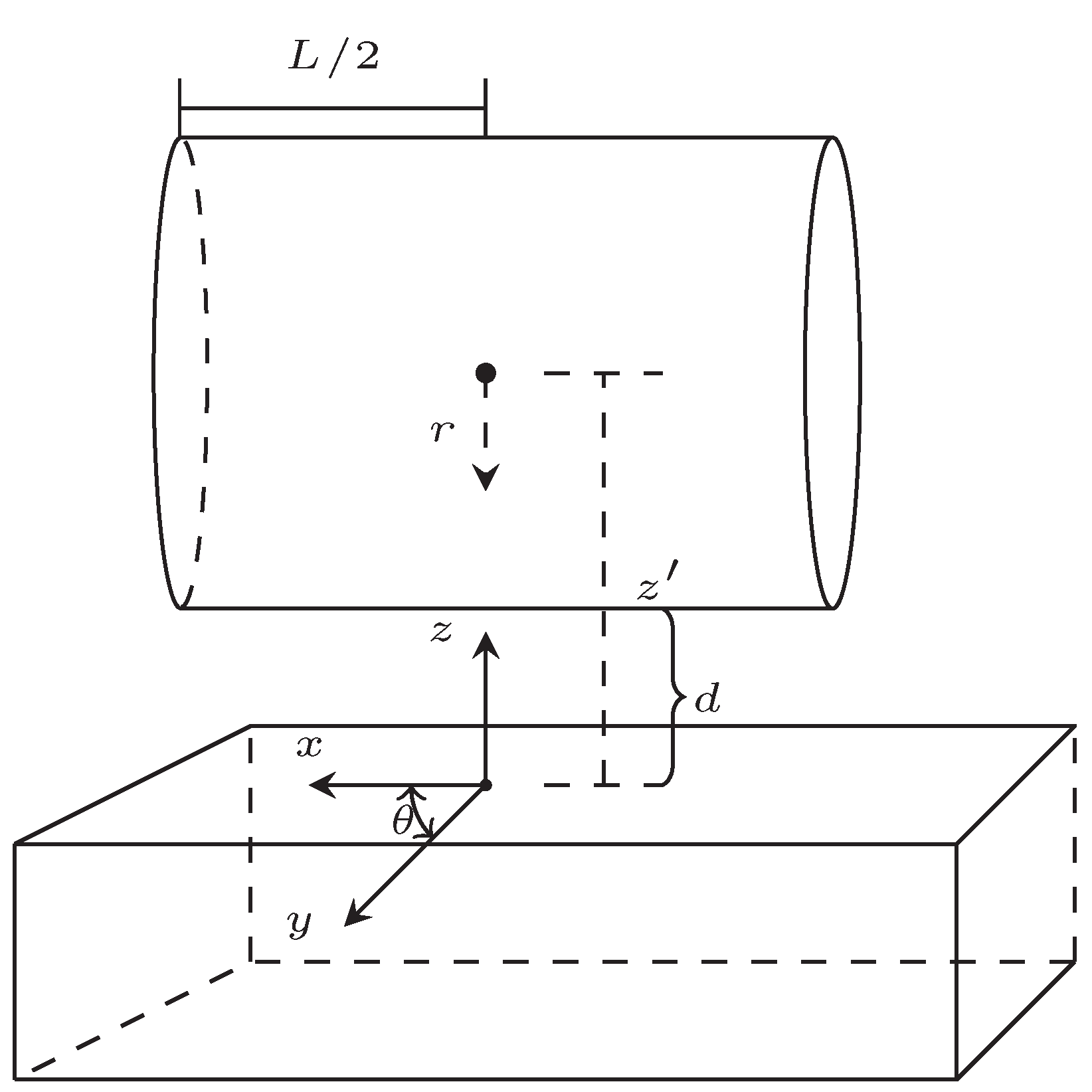
Figure A1.
The coordinate system used to integrate over the infinite slab-cylinder geometry. L is the length of the cylinder and d is the distance from the top of the slab to the bottom of the cylinder.
Figure A1.
The coordinate system used to integrate over the infinite slab-cylinder geometry. L is the length of the cylinder and d is the distance from the top of the slab to the bottom of the cylinder.
First, we will start with the integral over the source mass.
The limits of integration over the source mass are ,, . Integrating over and doing the change of variable
Equation A15 is used for , for Eq. A10 was integrated specifically for those powers.
The field is along due to the source mass is calculated by
Appendix B.1. n=1
Appendix B.2. n=2
Here the limits of integration for are . Integrating with respect to and making the following substitution gives
Since we are considering the source mass as an infinite slab we take
The limits of integration over the cylindrical test mass are , , and with and
We could not find an analytical solution to the final integral, and it was solved numerically.
Appendix B.3. n=3
Integrating and substituting
Appendix B.4. n=4
Starting with Eq. A15 for
and
Appendix B.5. n=5
Starting with Eq. A15 for
, , ,
and
References
- Langacker, P. The standard model and beyond; Taylor & Francis, 2017. [Google Scholar]
- Kiefer, C. Why quantum gravity? Springer, 2007. [Google Scholar]
- Rovelli, C. Quantum gravity; Cambridge university press, 2004. [Google Scholar]
- Weinberg, S. A new light boson? Physical Review Letters 1978, 40, 223. [Google Scholar] [CrossRef]
- Klimchitskaya, G.L.; Mostepanenko, V.M. Dark Matter Axions, Non-Newtonian Gravity and Constraints on Them from Recent Measurements of the Casimir Force in the Micrometer Separation Range. Universe 2021, 7, 343. [Google Scholar] [CrossRef]
- Banks, H.; McCullough, M. Charting the fifth force landscape. Physical Review D 2021, 103, 075018. [Google Scholar] [CrossRef]
- Adelberger, E.; Heckel, B.R.; Hoedl, S.; Hoyle, C.; Kapner, D.; Upadhye, A. Particle-physics implications of a recent test of the gravitational inverse-square law. Physical Review Letters 2007, 98, 131104. [Google Scholar] [CrossRef] [PubMed]
- Klimchitskaya, G.L. Constraints on Theoretical Predictions beyond the Standard Model from the Casimir Effect and Some Other Tabletop Physics. Universe 2021, 7. [Google Scholar] [CrossRef]
- Adelberger, E.; Heckel, B.; Nelson, A. TESTS OF THE GRAVITATIONAL INVERSE-SQUARE LAW. Annual Review of Nuclear and Particle Science 2003, 53, 77–121. [Google Scholar] [CrossRef]
- Tan, W.H.; Du, A.B.; Dong, W.C.; Yang, S.Q.; Shao, C.G.; Guan, S.G.; Wang, Q.L.; Zhan, B.F.; Luo, P.S.; Tu, L.C.; et al. Improvement for testing the gravitational inverse-square law at the submillimeter range. Physical Review Letters 2020, 124, 051301. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.J.; Tham, W.K.; Krause, D.E.; López, D.; Fischbach, E.; Decca, R.S. Stronger Limits on Hypothetical Yukawa Interactions in the 30–8000 nm Range. Phys. Rev. Lett. 2016, 116, 221102. [Google Scholar] [CrossRef] [PubMed]
- Timberlake, C.; Vinante, A.; Shankar, F.; Lapi, A.; Ulbricht, H. Probing modified gravity with magnetically levitated resonators. Physical Review D 2021, 104, L101101. [Google Scholar] [CrossRef]
- Westphal, T.; Hepach, H.; Pfaff, J.; Aspelmeyer, M. Measurement of gravitational coupling between millimetre-sized masses. Nature 2021, 591, 225–228. [Google Scholar] [CrossRef] [PubMed]
- Sedmik, R.I.P.; Pitschmann, M. Next Generation Design and Prospects for Cannex. Universe 2021, 7. [Google Scholar] [CrossRef]
- Barker, P.F.; Bose, S.; Marshman, R.J.; Mazumdar, A. Entanglement based tomography to probe new macroscopic forces. Physical Review D 2022, 106, L041901. [Google Scholar] [CrossRef]
- Shi, H.; Zhuang, Q. Ultimate precision limit of noise sensing and dark matter search. npj Quantum Information 2023, 9, 27. [Google Scholar] [CrossRef]
- Moore, D.C.; Geraci, A.A. Searching for new physics using optically levitated sensors. Quantum Science and Technology 2021, 6, 014008. [Google Scholar] [CrossRef]
- Kawasaki, A. Measurement of the Newtonian constant of gravitation G by precision displacement sensors. Classical and Quantum Gravity 2020, 37, 075002. [Google Scholar] [CrossRef]
- Tino, G.M. Testing gravity with cold atom interferometry: results and prospects. Quantum Science and Technology 2021, 6, 024014. [Google Scholar] [CrossRef]
- Decca, R.; Lopez, D.; Chan, H.; Fischbach, E.; Krause, D.; Jamell, C. Constraining new forces in the Casimir regime using the isoelectronic technique. Physical Review Letters 2005, 94, 240401. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nature Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Bsaibes, T.; Pires, L.; Czaplewski, D.; López, D.; Decca, R.S. Toward a better system for short range precision force measurements. Modern Physics Letters A 2020, 35, 2040002. [Google Scholar] [CrossRef]
Figure 1.
Cut out view (not to scale) of the source mass and test mass showing the individual layers. The source mass has top Au layer, followed by a Cr layer, and then the alternating Si and Au regions. The test mass has a central sapphire core (shown in blue) coated with Cr and Au. The z indicates the separation and the direction which the experiment is sensitive.
Figure 1.
Cut out view (not to scale) of the source mass and test mass showing the individual layers. The source mass has top Au layer, followed by a Cr layer, and then the alternating Si and Au regions. The test mass has a central sapphire core (shown in blue) coated with Cr and Au. The z indicates the separation and the direction which the experiment is sensitive.
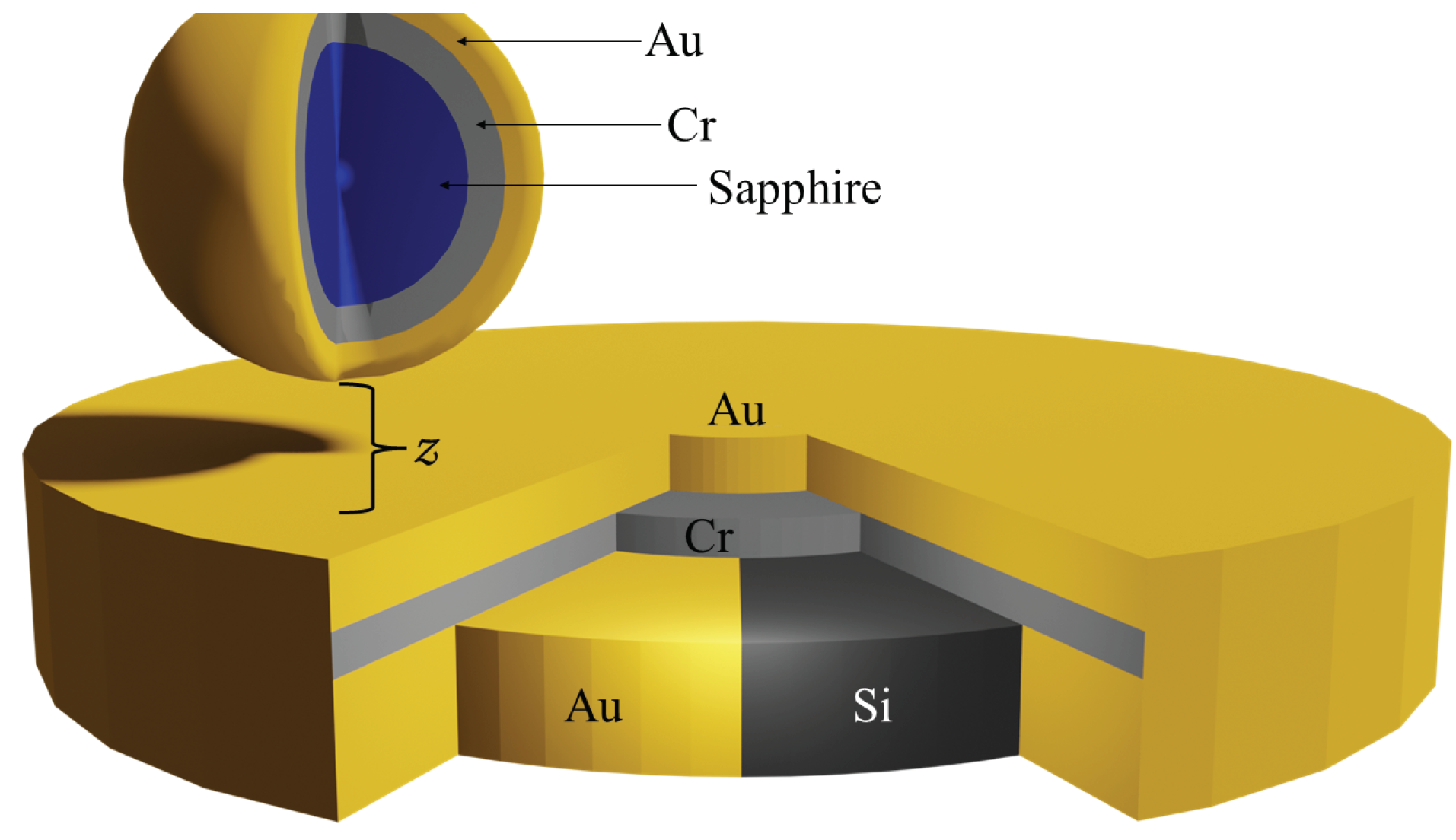
Figure 2.
A diagram showing the new source mass geometry, regions alternate between gold and silicon.
Figure 2.
A diagram showing the new source mass geometry, regions alternate between gold and silicon.
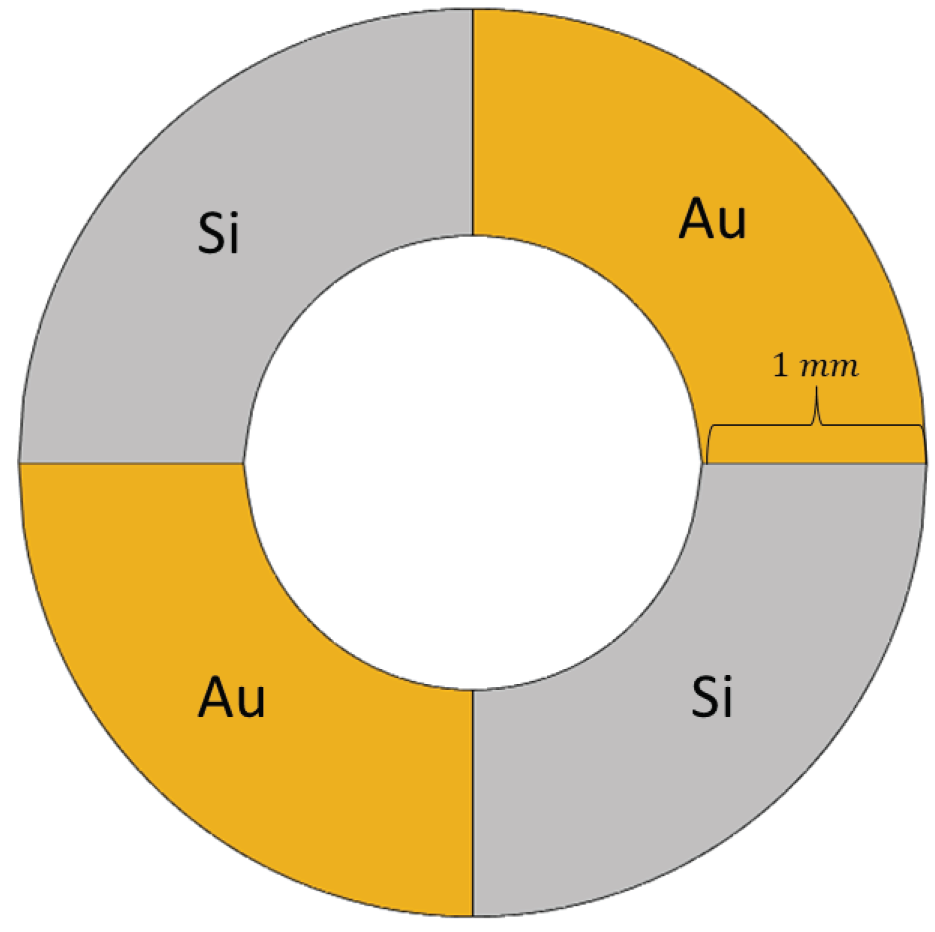
Figure 3.
The coordinate system and geometry over which the test mass and source mass were integrated. The unprimed coordinate system is used to integrate over the sphere. and are the polar and azimuthal angle respectively, is the distance from the center of the sphere to an arbitrary point in the source mass, and r is the separation between points in the sphere and points in the disk. The primed coordinate system is the system used to integrate the geometry of the source mass. is the polar angle in the primed coordinates and is the radial variable in the source mass system.
Figure 3.
The coordinate system and geometry over which the test mass and source mass were integrated. The unprimed coordinate system is used to integrate over the sphere. and are the polar and azimuthal angle respectively, is the distance from the center of the sphere to an arbitrary point in the source mass, and r is the separation between points in the sphere and points in the disk. The primed coordinate system is the system used to integrate the geometry of the source mass. is the polar angle in the primed coordinates and is the radial variable in the source mass system.
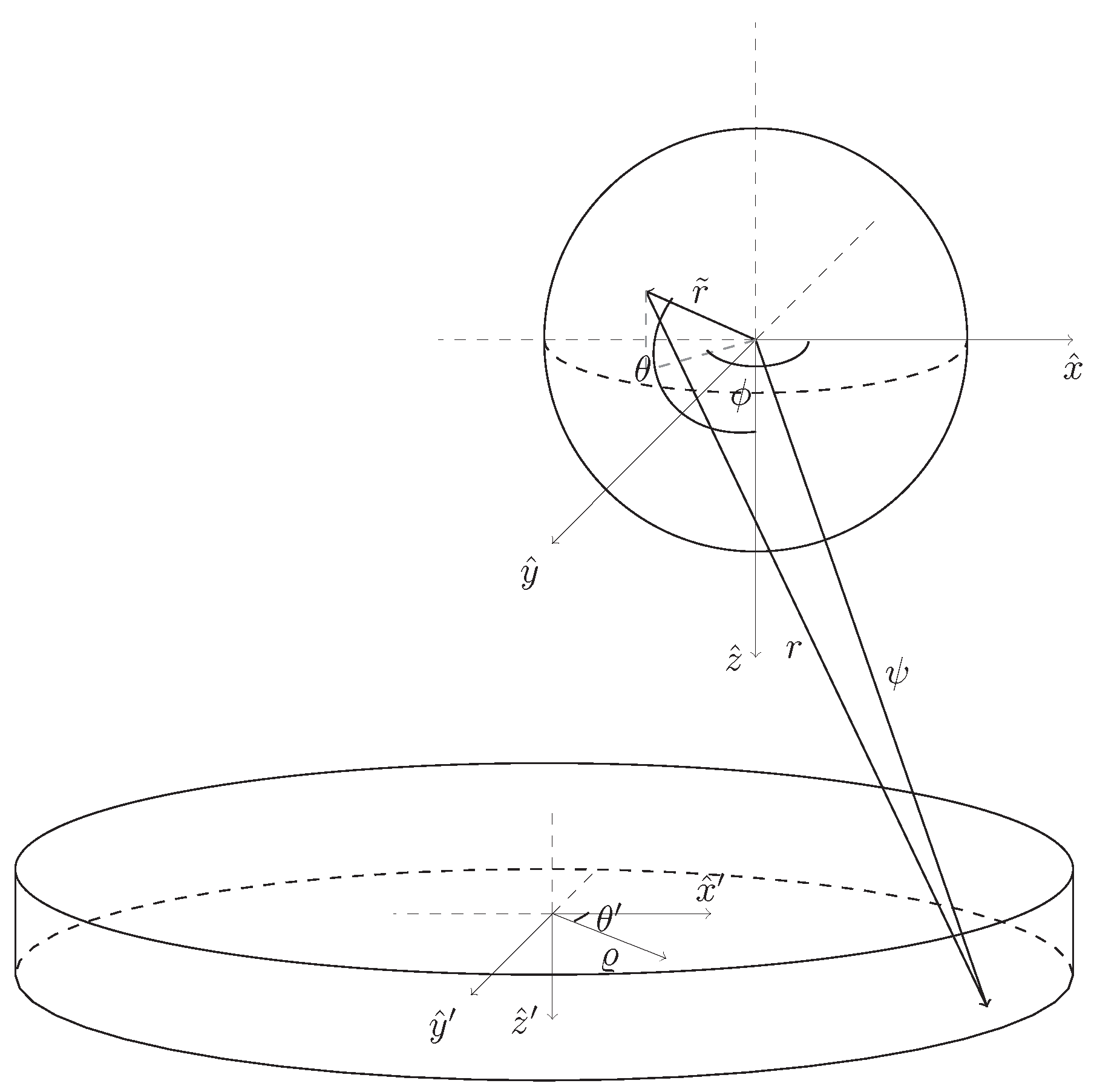
Figure 4.
The total force as the angular location of the sphere changes, which is equivalent to fixing the location of the sphere and rotating the sample. The first harmonic of the force in accordance with the period of the sectors is calculated and equated to the error bars of the force measurement to extract . This example is from Eq. 10, where , from Eq. 10.
Figure 4.
The total force as the angular location of the sphere changes, which is equivalent to fixing the location of the sphere and rotating the sample. The first harmonic of the force in accordance with the period of the sectors is calculated and equated to the error bars of the force measurement to extract . This example is from Eq. 10, where , from Eq. 10.
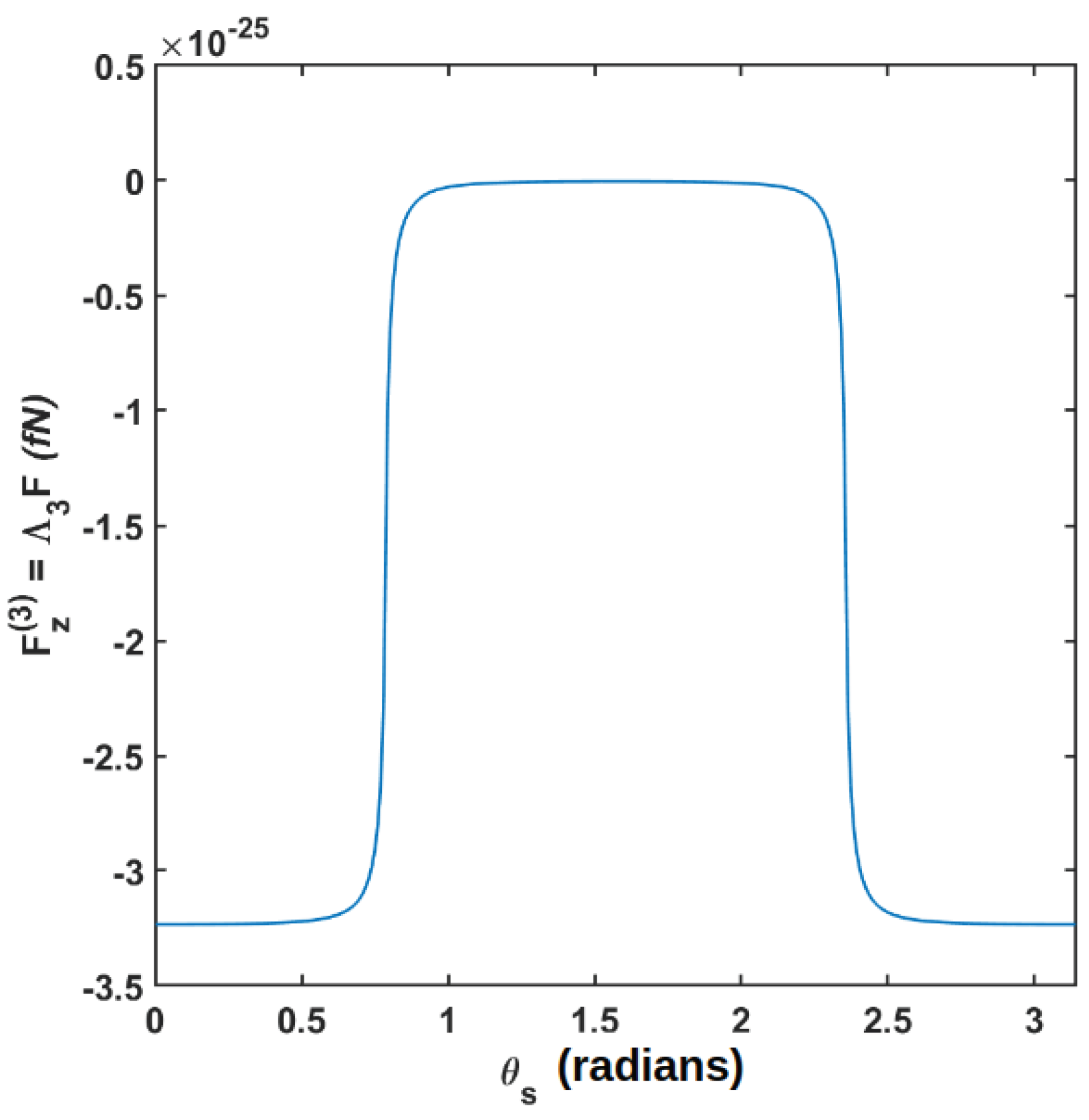
Figure 5.
Measured force as a function of separation of the large source mass. The blue circle data corresponds to the sample with an inner radius of 2.5 mm and the orange squares are the data from the 5 mm inner radius sample.
Figure 5.
Measured force as a function of separation of the large source mass. The blue circle data corresponds to the sample with an inner radius of 2.5 mm and the orange squares are the data from the 5 mm inner radius sample.
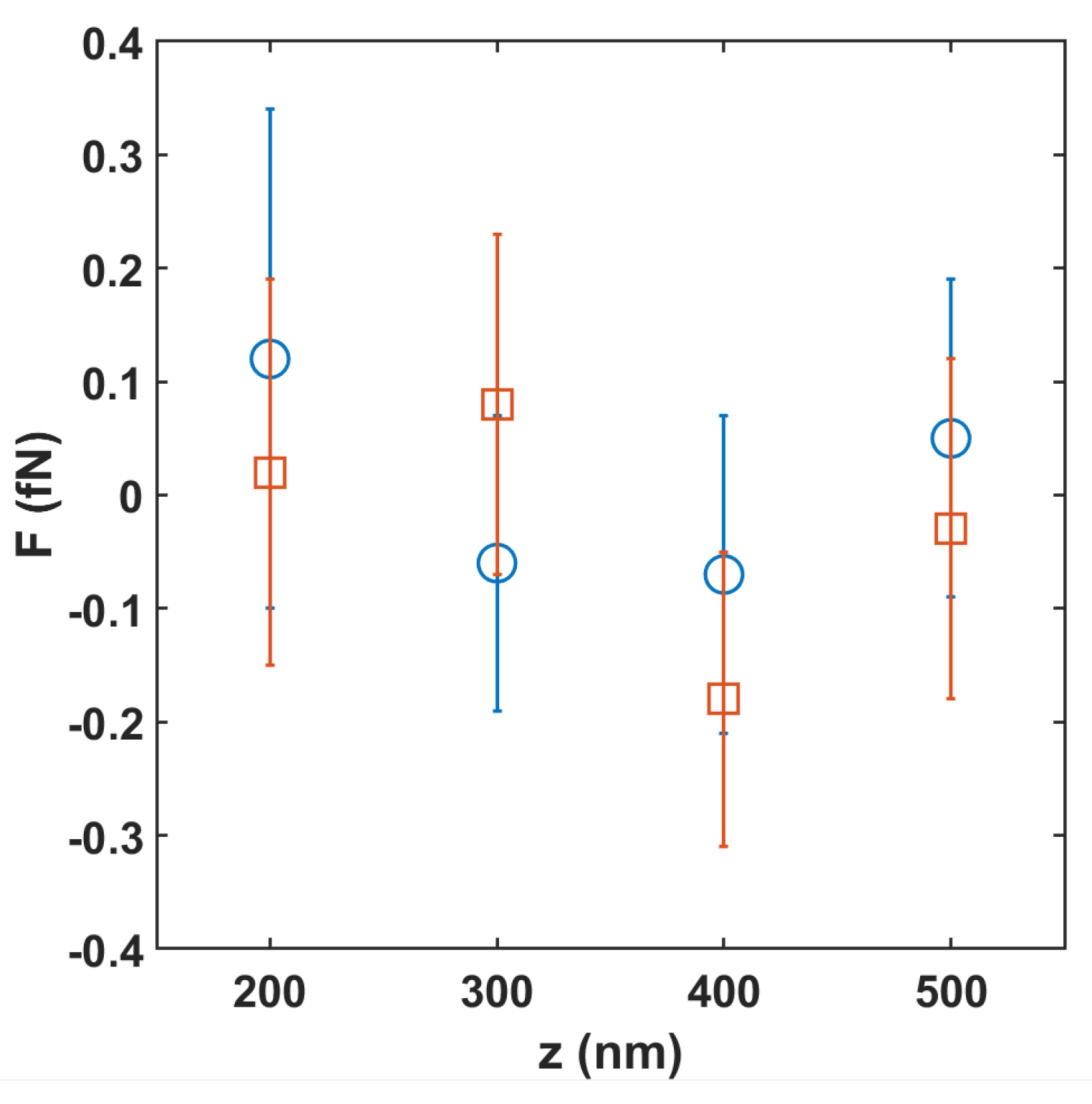
Figure 6.
The limits on can be marginally improved if the size of the source mass is designed with power law interactions in mind. Shown here are the estimated limits for n = 5 as a function of the width of the source mass. However the improvement gained by increasing the source mass size quickly diminishes. The constant orange line is the limit that would be achieved as the width of the source mass goes to infinity.
Figure 6.
The limits on can be marginally improved if the size of the source mass is designed with power law interactions in mind. Shown here are the estimated limits for n = 5 as a function of the width of the source mass. However the improvement gained by increasing the source mass size quickly diminishes. The constant orange line is the limit that would be achieved as the width of the source mass goes to infinity.
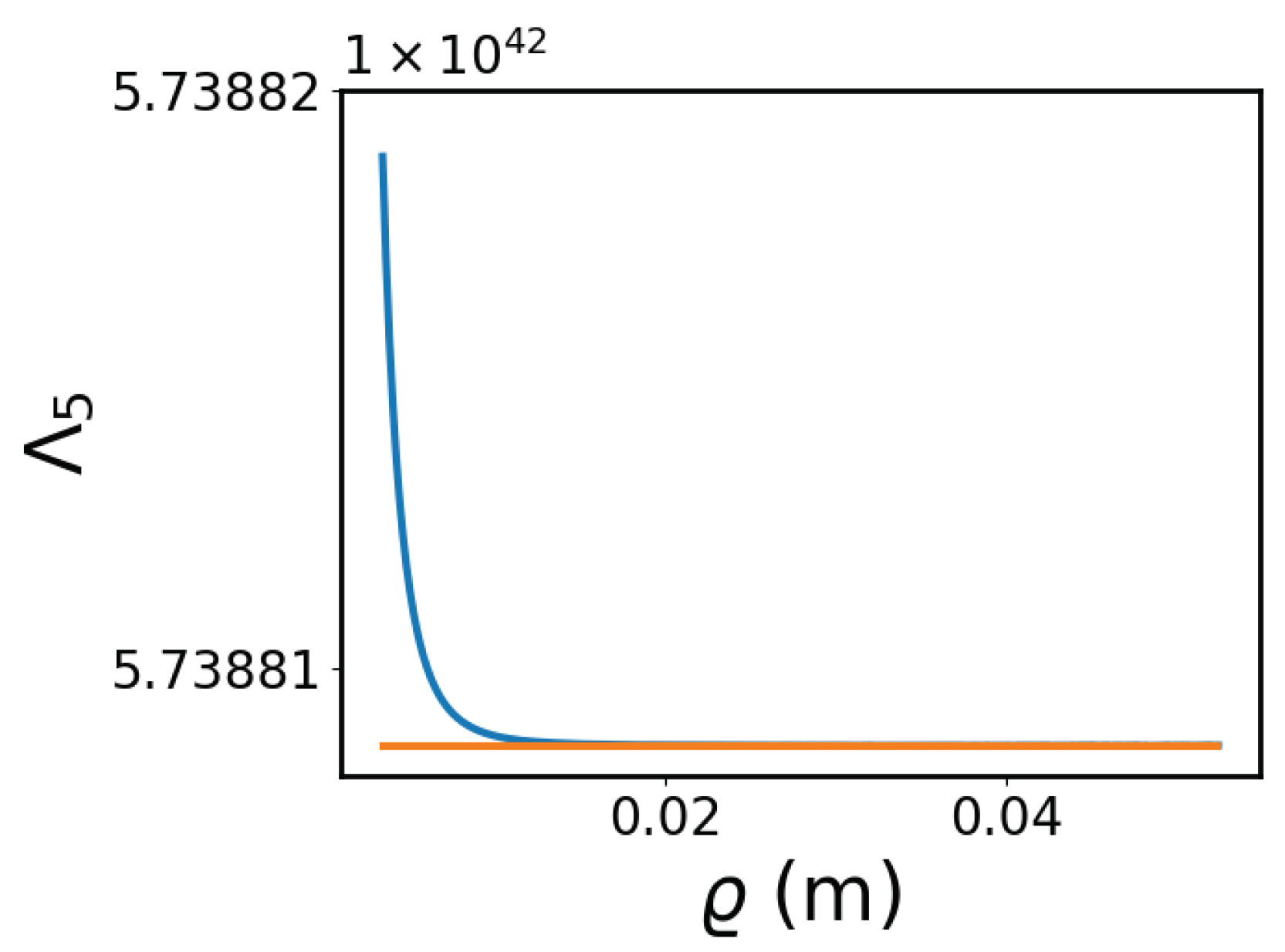
Table 1.
The constraints placed on from our experiment compared to the limits reported in [8]. The two right most columns are the limits calculated using the data from the many sector samples and the large sector samples.
Table 1.
The constraints placed on from our experiment compared to the limits reported in [8]. The two right most columns are the limits calculated using the data from the many sector samples and the large sector samples.
| n | from [8] | Many Sector Sample | Large Sector Sample |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 |
Table 2.
The constraints that could be placed on if a cylindrical test mass were used with a source mass designed to probe power law potentials.
Table 2.
The constraints that could be placed on if a cylindrical test mass were used with a source mass designed to probe power law potentials.
| n | from [8] | Cylindrical Test Mass |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



