
Submitted:
18 March 2024
Posted:
19 March 2024
You are already at the latest version
Abstract
Among the major systems of high-speed rail, the arch network relationship, wheel-rail relationship and fluid-structure coupling relationship are important links affecting the performance of high-speed rail, and also the main control factors affecting the speed limit of high-speed rail. From this perspective, the contact state and interactive relationship between pantograph and catenary are the key factors affecting the forward performance of high-speed rail. As a key component in the pantograph system, the actuator is responsible for adjusting the contact force and position between the pantograph and the contact line. The performance characteristics of the actuator, such as response speed, accuracy, stability and durability, directly affect the control performance of the whole pantograph system. In this paper, the research status of the active control technology of high-speed railway pantograph is reviewed, and the future development direction is pointed out, which provides a new idea for the development of pantograph technology.
Keywords:
High-speed railway
; pantograph
; active control
; overhead contact system
1. Introduction
High-speed railways (hereinafter referred to as high-speed rail or HSR), as a representative of modern industry, have garnered significant attention both domestically in China and internationally [1]. Over the past decade, owing to its remarkable social and economic benefits, HSR has experienced substantial development. Currently, HSR technology has transitioned from ensuring basic safety to further enhancing comfort, reliability, and real-time performance. As a highly complex system, the interaction among internal subsystems of HSR and between subsystems and the external environment is crucial to the operation of HSR [2]. Among these, the pantograph-catenary relationship, wheel-rail interaction, and fluid-structure coupling are the three primary aspects and the major factors limiting the maximum operating speed of high-speed trains. HSR commonly employs electric traction, where the pantograph collects current from the overhead catenary. Therefore, the sliding contact state and dynamic coupling relationship between the pantograph and the catenary are critical factors affecting the energy acquisition of trains, as shown in Figure 1 [3].
As the operating speed increases, the complex coupling vibrations between pantographs intensify, aggravated by deteriorating current quality. The adoption of the dual-pantograph operation mode contributes as the second reason for degraded current quality. Running trains in multiple units can significantly enhance operational capacity, a necessity under current market conditions in China [4]. During the operation of trains in multiple units, due to current limitations imposed by the pantograph head sliding contact, a dual-pantograph operation mode is required. This entails the erection of a pantograph on each of the front and rear sets of train units, thereby alleviating the current pressure on the sliding contact of a single pantograph [5]. However, during this operation, the impact of the front pantograph (hereinafter referred to as the leading pantograph) on the catenary is transmitted in wave form to the rear pantograph (hereinafter referred to as the trailing pantograph) through the catenary. Simultaneously, due to the combined effect of catenary vibration, the current quality deteriorates rapidly for the trailing pantograph [6]. Furthermore, discrepancies between system design and actual system conditions, resulting from limitations in catenary construction and maintenance, also contribute to current quality degradation. Overall, the primary factors affecting current quality include: increase in operating speed, adoption of the dual-pantograph operation mode, limitations in construction and maintenance, and external environmental disturbances such as wind, rain, and tunnels [7].
In reality, current quality falls within the realm of electrical engineering concepts. However, in the research aimed at improving and optimizing pantograph-catenary relationships, this concept proves difficult to extend to generalized system models, whether as input or output variables [8]. Generally, parameters related to the contact force between pantographs and the catenary, such as the average, standard deviation, maximum, minimum values, and offline rate of the contact force, are used as surrogate parameters for assessing current quality in pantograph-catenary systems [9]. In other words, in specific studies optimizing pantograph-catenary systems, the focus shifts from improving current quality to optimizing parameters related to contact forces.
Over the years, extensive research and analysis have been conducted worldwide to reduce contact force fluctuations and improve current quality in pantograph-catenary relationships. Measures such as optimizing catenary structures, pantograph structures, dual-pantograph spacing, and static uplift forces between pantographs have been proposed [10]. However, these measures are subject to certain limitations. Optimizing catenary structures can only be implemented on newly constructed lines, requiring significant human and financial resources if applied to existing lines, which incurs high costs and doesn’t fundamentally resolve contact force fluctuation issues during dual-pantograph operation. Pantograph structure optimization lacks flexibility for adjustments based on different catenary types, and the effectiveness of optimizing different spacings between dual pantographs and static uplift forces is limited [11].
Considering the above analysis, this paper aims to reduce contact force fluctuations through active control of pantographs. Firstly, active control of pantographs is not specific to any particular catenary or pantograph type. With control algorithms determined, only adjustments to control parameters are necessary, making it applicable to any pantograph-catenary structure. Secondly, active control of pantographs incurs lower costs, requiring only appropriate modifications to pantographs without the need to optimize or modify any parameters or structures of the catenary. Therefore, it can be applied to various types of catenaries, from low-speed to high-speed and from existing to newly constructed lines [12]. Lastly, active control of pantographs requires minimal state information depending on the control algorithm, such as real-time contact force, pantograph head and frame displacement, and velocity [13]. This feature indirectly enhances the system’s anti-interference capability. Based on this, the paper proposes research on active control strategies for pantographs based on the approach of “pantograph system modeling → pantograph state estimation → estimation-based control algorithm.”[14] The aim is to reduce contact force fluctuations and improve current quality for train units through active control of pantographs.
1. Research Progress
Given the unique nature of pantograph-catenary systems as a research subject, during the initial stages of active control research for pantographs, the cost of field trials is high and the benefits are limited. Therefore, computer simulation methods are commonly employed, making an effective pantograph-catenary system model indispensable. Generally, the catenary and pantograph are modeled separately, and then dynamically coupled through certain methods. The following sections introduce these two aspects respectively [15].
(1) Research Progress on Pantograph Models
In general, there are two main types of pantograph models: the equivalent mass model and the framework model.
The equivalent mass model of the pantograph is the most widely used. It represents different components of the pantograph (such as the head, upper frame, and lower frame) as equivalent mass blocks, with the interaction between adjacent components expressed through parallel damping forces, elastic forces, and frictional forces.
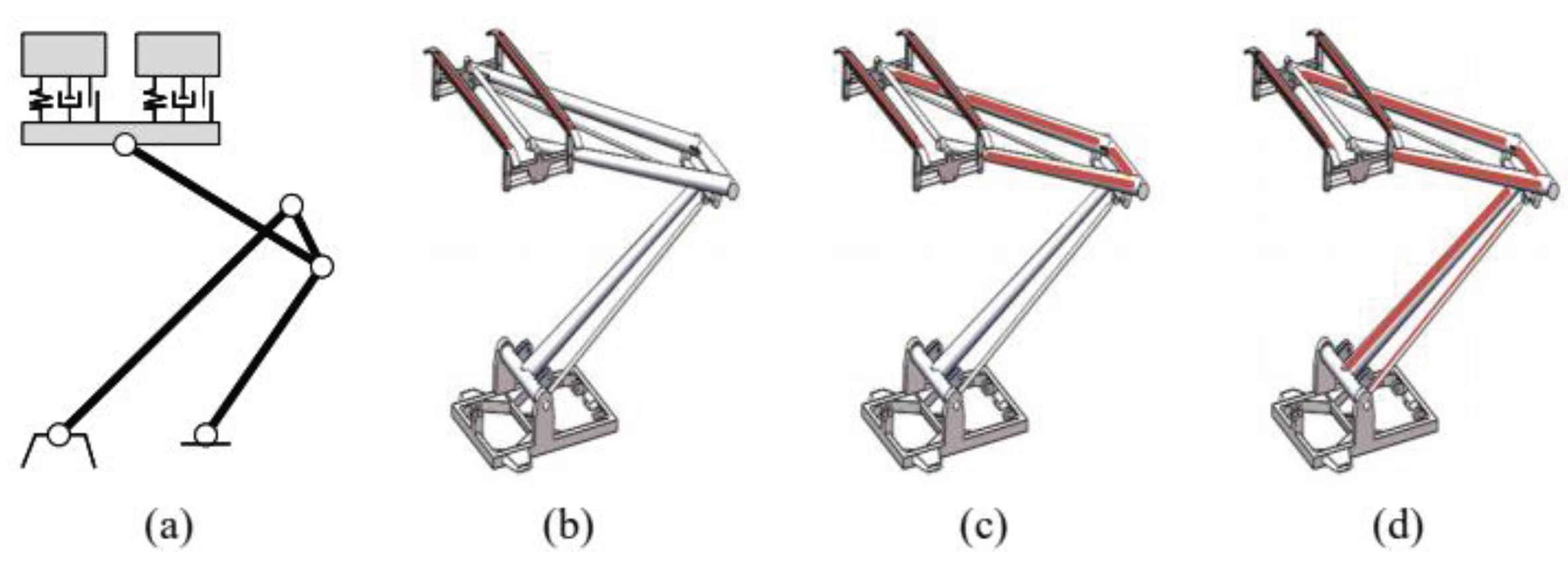
The framework model of the pantograph refers to modeling some or all components of the pantograph as rigid bodies, with the deformable parts transformed into flexible bodies by dividing them into grids [16]. Depending on the number of parts transformed into flexible bodies, the framework model of the pantograph can be categorized as follows: multi-rigid-body model, as shown in Figure 2a, where the pantograph head and slide are modeled as equivalent mass, and the framework part is modeled as rigid; rigid-flexible hybrid model, where, depending on the importance of the analysis object, the pantograph head slide or upper frame is divided into grids and modeled as a flexible body, and some parts of the framework are modeled as rigid bodies, as illustrated in Figure 2b,c, respectively; full-flexible model, where all components of the pantograph are modeled as flexible bodies by dividing them into grids. Literature has established a pantograph model library and conducted a detailed analysis of the advantages, disadvantages, and scope of use of various pantograph models [17].
In addition to the two common pantograph models mentioned above, literature has proposed a hybrid pantograph model combining the framework model and a binary mass block-based pantograph head model [18].
On the surface, the equivalent mass model of the pantograph and the actual pantograph exhibit significant differences in form. However, their parameters are obtained through frequency response methods, making the dynamic characteristics of the model closer to those of the actual pantograph [19]. The framework model closely resembles the actual pantograph in form, but except for parameters such as rod length, mass, and inertia, which can be measured directly, important parameters affecting the dynamic characteristics of the pantograph, such as interactions between components, frictional forces, and joint behavior, cannot be obtained from the actual pantograph. Generally, if one wishes to study the coupling characteristics of the pantograph-catenary system or the impact of external disturbances on the system, the equivalent mass model of the pantograph can be used [20]. However, if one aims to optimize the structure of the pantograph, design new types of pantographs, or study the dynamic characteristics of the pantograph itself, then the framework model of the pantograph is indispensable.
(2) Research Progress on Catenary Models
Currently, there are three main types of catenary suspension systems used in the field: simple chain suspension, elastic chain suspension, and complex chain suspension. Regardless of the suspension type, the modeling methods mainly include the following: first, the stiffness fitting method (simple model); second, the modal analysis method; third, the finite element method. Literature provides a simple comparison of these three forms of catenary models.
The stiffness fitting method-based catenary model represents the static vertical stiffness of the catenary through numerical fitting. Its rationality lies in the fact that the main causes of contact force fluctuations are uneven distribution of static stiffness along the contact line and the propagation of wave disturbances along the catenary caused by pantograph impacts. The stiffness fitting method can simulate the former to some extent. Contact force calculation only requires multiplying the stiffness coefficient at the corresponding position by the pantograph head uplift amount, resulting in very fast computation. The drawback of this model is that it only considers the influence of catenary static stiffness on contact force, thus it cannot analyze the effects of pantograph offline and uneven contact line on dynamic characteristics using this model. Another type of simple catenary model can also simultaneously consider the mass, damping, and stiffness of the catenary. Compared to the direct stiffness fitting method model, this model is more accurate.
Based on the modal analysis method, the catenary model first considers the contact line and support cable as Euler-Bernoulli beams and the hanger cables as simple springs for mechanical analysis. Then, the vertical displacement of the contact line and support cable is expanded into a series of sine and cosine functions for solving. As a two-dimensional model, this form can analyze the vertical displacement of the contact line and the propagation of waves on the catenary, while neglecting factors such as sag and lateral vibration of the contact line. The accuracy and computation time of the model depend on the chosen series of sine functions. Literature has established a complete modal analysis-based catenary model based on detailed mechanical analysis of beam elements. To ensure reasonable calculation time, the frequency modes are generally limited to within 30 Hz. The literature has utilized this model to design a semi-physical and semi-virtual real-time simulation platform for the catenary system, coupling the actual pantograph with it and calculating in real-time. Using a shaker to simulate the effect of the catenary on the pantograph, this semi-physical and semi-virtual experimental platform has gained widespread influence in the field of catenary research. The literature also considers the morphological characteristics of the contact line in the modal analysis method model.
The catenary model based on the finite element method can accurately consider the structural characteristics of the catenary, separately considering the contact line, support cable, hanger cable, and arms. The literature initially proposed a catenary model based on a nonlinear rod/cable model, modeling the contact line and support cable as nonlinear beam elements and the hanger cable as a nonlinear rod element. The literature optimized and improved upon this work, and validated the model’s effectiveness using different criteria. The literature established a catenary model based on linear finite element Euler-Bernoulli beam elements. By incorporating a nonlinear hanger cable model into the finite element model of the catenary’s two-node Euler-Bernoulli beam elements, the literature considered the forces under hanger cable relaxation conditions. The literature established a catenary finite element model based on the Absolute Nodal Coordinate Formulation (ANCF), modeling the contact line and support cable as two-dimensional nonlinear continuous beam elements and the hanger cable as a flexible body that only accepts tension and not compression. The main advantage of ANCF is its ability to fully consider large deformations of structures. The literature used low-order elements for the contact line and support cable, while also considering the effects of hanger cable relaxation, pre-tensioning, sag, and arms, to establish a three-dimensional catenary model using ANCF. The literature used the three-dimensional ANCF method for static shape finding of the catenary. The literature proposed a fast two-stage solution method for solving nonlinear finite element catenary models, greatly improving computational efficiency and suitable for semi-physical and semi-virtual real-time simulation platforms. The literature provided a detailed comparison of the development of catenary models both domestically and abroad, analyzing the actual simulation effects of each model.
In addition to the above-mentioned catenary system models, it is worth noting that the literature has creatively proposed the well-known semi-physical and semi-virtual catenary system simulation platform. This platform uses an actual pantograph and virtual catenary, with the catenary’s excitation on the pantograph achieved through a shaker installed above the pantograph head. During operation, the upper computer calculates the catenary’s state in real-time and changes the shaker’s excitation on the pantograph head to achieve catenary-pantograph coupling analysis. The emergence of the semi-physical and semi-virtual platform greatly improves the efficiency of catenary system research, particularly playing a significant role in pantograph structural design and optimization and active pantograph control research, serving as a third choice apart from purely numerical catenary system simulations and field trials.
2. Current Research on Active Pantograph Control
Research on active pantograph control includes studies on control algorithms, actuators, control structures, measurement systems, and test systems. Among these, control algorithms occupy a central position. Therefore, this section primarily focuses on the development of control algorithms for active pantograph control, while also analyzing the progress in other aspects.
(1) PID Control
PID control is the most widely used in research on active pantograph control. Literature utilizes two control algorithms: PD-type contact force feedback control and feedforward control to reduce specific frequency components of contact force fluctuations. The latter emphasizes the role of span frequency and hanger frequency in contact force fluctuations. By installing motors and flow guides in parallel below the pantograph head slide, the system adjusts the rotation of the flow guides in real-time to provide aerodynamic lift or downward pressure. The relationship between rotation angle and force is determined through wind tunnel experiments. Literature proposes a PID controller for the pantograph using a nonlinear Bouc-Wen model and incorporating the concept of apparent mass. It analyzes various actuator structures in detail and proposes an actuator scheme based on a hydraulic servo mechanism. Literature integrates an active pantograph control strategy, including actuation systems, sensors, drivers, and PD controllers, into the T2006 pantograph design and experimentally verifies the control effectiveness under different conditions. It initially applies a semi-physical and semi-virtual experimental platform to research active pantograph control, validates the control effectiveness of P-type controllers, and estimates contact force through Kalman filtering, with the input being only the frame displacement of the pantograph. Similarly, literature installs brushless DC motors below the pantograph head to verify PID control for the ATR95 pantograph.
(2) Optimal Control
Literature proposes an optimal LQR controller to achieve full-state feedback. It designs a sliding mode observer to observe the pantograph state. The controller’s robustness is analyzed by setting uncertain parameters, and its impact on control performance is analyzed through Bode plot analysis. Literature transforms the robust control problem into an optimal control problem based on the Bellman optimality principle and Razumikhin theorem. It proposes a state feedback control strategy based on Lyapunov stability theory to ensure the quadratic stability and robust performance of the closed-loop system, analyzing system stability considering actuator delays. Similar control strategies are proposed in literature, obtaining pantograph frame parameters through Pareto optimal solution sets and variable weights. Literature analyzes optimal control under the condition of partially measurable pantograph states.
(3) Sliding Mode Control
Literature proposes a second-order sliding mode controller, handling the linear actuator’s influence through linear compensation. To avoid direct measurement of contact force, it designs a real-time sliding mode differentiator to obtain feedback signals from the displacement of the upper and lower frames. Literature designs a variable structure controller that can overcome uncertainties in contact line parameters, including feedforward compensation and time-varying feedback compensation. It designs a linear actuator-based control force applied to the pantograph head, with the limitation of only providing lifting force. Additionally, literature introduces a fuzzy adaptive terminal sliding mode controller based on optimal load, enhancing system robustness to parameter uncertainties and overcoming system oscillations.
(4) Other Controllers
Literature proposes a fuzzy controller for the pantograph. It innovatively designs a specific frequency/bandwidth controller using geometric design methods instead of traditional weighting function methods to control contact force fluctuations caused by pantograph and vehicle vibrations. Literature introduces a model reference adaptive control algorithm for the pantograph, simplifying model verification to validate the algorithm’s effectiveness. It designs differential controllers, differential/bang-bang controllers, and differential/exponential controllers, tuning control parameters through virtual passive control strategies, validated by ANCF-based contact network models and multi-body pantograph models. Additionally, literature proposes impedance control for the pantograph, mimicking dynamic behavior by tracking a dynamic relationship with any actuator. It further presents a linear time-varying model predictive impedance controller, ensuring energy conservation through constraints, and extensively verifies it with a semi-physical and semi-virtual experimental platform. Other proposed controllers include output feedback control based on backstepping, feedforward control utilizing span and vehicle speed information, and controllers considering uncertainties in pantograph parameters using linear matrix inequalities and state observers. Moreover, literature presents a fuzzy PID controller, comparing different controller performances based on a simplified pantograph model, particularly analyzing the controllers’ effects on pantograph offline arcs and thermal effects.
In summary, the current research on active control of pantographs faces several issues:
(1) The control objective primarily focuses on reducing the fluctuation of contact force, namely decreasing the standard deviation of contact force. There is less concern about the control force magnitude and the impact of pantograph control on the overhead catenary system.
(2) Some studies partially involve contact force estimation, but they do not mention how other state variables of the pantograph are obtained. However, the acquisition of state variables and their accuracy are crucial in state feedback-based control.
(3) The control of pantographs (gain matrix calculation) rarely utilizes relevant information from the overhead catenary system. Since contact force fluctuation is closely related to both the pantograph and the overhead catenary system, utilizing effective information from the catenary system could greatly improve control efficiency.
(4) Issues related to actuators are not addressed, such as input delay, which may diminish the effectiveness of nominal algorithms.
(5) Most validation analyses of control algorithms are conducted using simple single-pantograph-wire system models, especially simplistic overhead catenary system models. This significantly overlooks the necessity of active pantograph control. Furthermore, there is no analysis of the effectiveness of the system in the context of double-pantograph-wire systems.
3. Conclusions
High-speed railway pantographs, single-pantograph-wire systems, and double-pantograph-wire systems can reduce contact force fluctuations and improve current collection quality through active pantograph control. Future research directions include:
(1) Investigating control-oriented pantograph state estimation algorithms, utilizing only a portion of measurement data containing noise to estimate all required states, thereby providing input for state feedback-based control algorithms, reducing the number of sensors, and enhancing algorithm practicality.
(2) Researching multi-objective robust control algorithms considering actuator output constraints and key vertical displacements of the overhead catenary system.
(3) Identifying prior information on contact force and studying finite frequency domain active pantograph control algorithms based on this information, fully utilizing the inherent structural features of the overhead catenary system to improve algorithm efficiency.
(4) Studying pantograph control algorithms considering actuator delay to address the negative impact of actuator delay in practical applications and improve algorithm practicality.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Acknowledgments
This research is supported by the Wenzhou Scientific Research Project under Grant No. G20210045, the Wenzhou Key Laboratory of Biomaterials and Engineering, Wenzhou Institute, University of Chinese Academy of Sciences under Grant No. WIUCASSWCL21002. The authors gratefully acknowledge the assistance of these support agencies.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hanley, D.; Li, J.; Wu, M. High-speed railways and collaborative innovation. Reg. Sci. Urban Econ. 2022, 93, 103717. [Google Scholar] [CrossRef]
- Blanquart, C.; Koning, M. The local economic impacts of high-speed railways: theories and facts. Eur. Transp. Res. Rev. 2017, 9, 12. [Google Scholar] [CrossRef]
- Raghunathan, R.S.; Kim, H.-D.; Setoguchi, T. Aerodynamics of high-speed railway train. Prog. Aerosp. Sci. 2002, 38, 469–514. [Google Scholar] [CrossRef]
- Bruni, S.; Bucca, G.; Carnevale, M.; Collina, A.; Facchinetti, A. Pantograph–catenary interaction: recent achievements and future research challenges. Int. J. Rail Transp. 2017, 6, 57–82. [Google Scholar] [CrossRef]
- Bruni, S.; Ambrosio, J.; Carnicero, A.; Cho, Y.H.; Finner, L.; Ikeda, M.; Kwon, S.Y.; Massat, J.-P.; Stichel, S.; Tur, M.; et al. The results of the pantograph–catenary interaction benchmark. Veh. Syst. Dyn. 2014, 53, 412–435. [Google Scholar] [CrossRef]
- Van, O.V.; Massat, J.-P.; Balmes, E. Waves, modes and properties with a major impact on dynamic pantograph-catenary interaction. J. Sound Vib. 2017, 402, 51–69. [Google Scholar] [CrossRef]
- Song, Y.; Duan, F.; Liu, Z. Analysis of Critical Speed for High-Speed Railway Pantograph-Catenary System. IEEE Trans. Veh. Technol. 2021, 71, 3547–3555. [Google Scholar] [CrossRef]
- Zhang, W.; Mei, G.; Wu, X.; Shen, Z. Hybrid simulation of dynamics for the pantograph-catenary system. Veh. Syst. Dyn. 2002, 38, 393–414. [Google Scholar] [CrossRef]
- Pombo, J.; Ambrósio, J.; Pereira, M.; Rauter, F.; Collina, A.; Facchinetti, A. Influence of the aerodynamic forces on the pantograph–catenary system for high-speed trains. Veh. Syst. Dyn. 2009, 47, 1327–1347. [Google Scholar] [CrossRef]
- Bocciolone, M.; Resta, F.; Rocchi, D.; Tosi, A.; Collina, A. Pantograph aerodynamic effects on the pantograph–catenary interaction. Veh. Syst. Dyn. 2006, 44, 560–570. [Google Scholar] [CrossRef]
- Aydin, I.; Karaköse, E.; Karaköse, M.; Gençoğlu, M.T.; Akın, E. A new computer vision approach for active pantograph control. In Proceedings of the 2013 IEEE INISTA, Albena, Bulgaria, 19–21 June 2013. [Google Scholar]
- Zhang, J.; Zhang, H.; Song, B.; Xie, S.; Liu, Z. A new active control strategy for pantograph in high-speed electrified railways based on multi-objective robust control. IEEE Access 2019, 7, 173719–173730. [Google Scholar] [CrossRef]
- Bruni, S.; Bucca, G.; Carnevale, M.; Collina, A.; Facchinetti, A. Pantograph–catenary interaction: recent achievements and future research challenges. Int. J. Rail Transp. 2018, 6, 57–82. [Google Scholar] [CrossRef]
- Song, Y.; Ouyang, H.; Liu, Z.; Mei, G.; Wang, H.; Lu, X. Active control of contact force for high-speed railway pantograph-catenary based on multi-body pantograph model. Mech. Mach. Theory 2017, 115, 35–59. [Google Scholar] [CrossRef]
- Zdziebko, P.; Martowicz, A.; Uhl, T. An investigation on the active control strategy for a high-speed pantograph using co-simulations. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 370–383. [Google Scholar] [CrossRef]
- Lin, Y.C.; Lin, C.L.; Yang, C.C. Robust active vibration control for rail vehicle pantograph. IEEE Trans. Veh. Technol. 2007, 56, 1994–2004. [Google Scholar]
- Shudong, W.; Jingbo, G.; Guosheng, G. Research of the active control for high-speed train pantograph. In Proceedings of the 2008 IEEE Conference on Cybernetics and Intelligent Systems, Chengdu, China, 21–24 September 2008; pp. 749–753. [Google Scholar]
- Pappalardo, C.M.; Patel, M.; Tinsley, B.; Shabana, A.A. Pantograph/catenary contact force control. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Vol. 57168, p. V006T10A028), Boston, MA, USA, 2–5 August 2015. [Google Scholar]
- Lin, Y.C.; Shieh, N.C.; Liu, V.T. Optimal control for rail vehicle pantograph systems with actuator delays. IET Control Theory Appl. 2015, 9, 1917–1926. [Google Scholar] [CrossRef]
- Wang, H.; Han, Z.; Wang, X.; Wu, Y.; Liu, Z. Contrastive learning-based bayes-adaptive meta-reinforcement learning for active pantograph control in high-speed railways. IEEE Trans. Transp. Electrif. 2023, 10, 2045–2056. [Google Scholar] [CrossRef]
Figure 1.
Pantograph-Catenary System in High-Speed Railways.
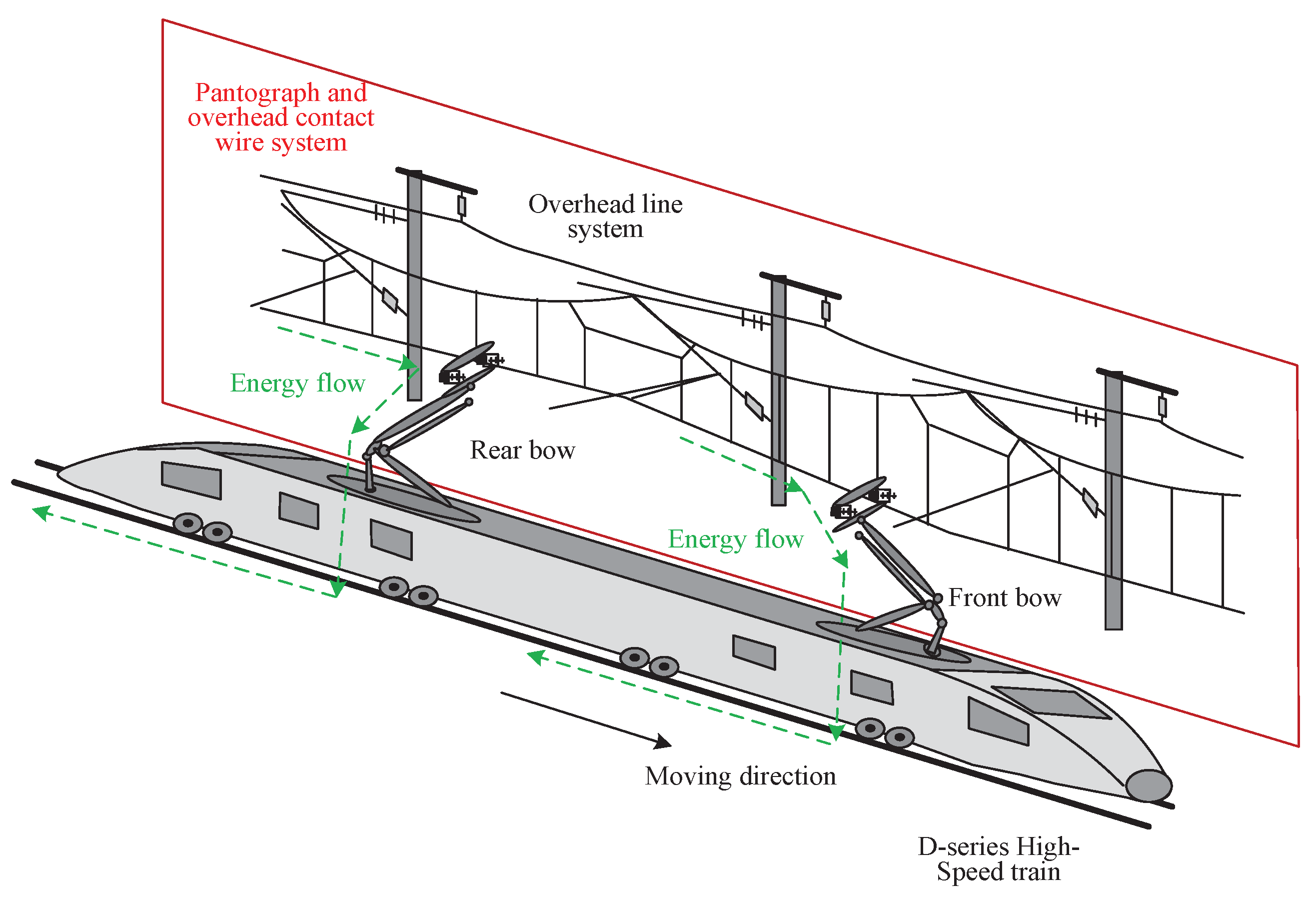
Figure 2.
Pantograph Framework Model.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



