
Submitted:
01 April 2024
Posted:
02 April 2024
You are already at the latest version
Abstract
Using structured light to drive colloidal motors, due to its advantages of remote manipulation, energy tunability, programmability, and controllability of spatiotemporal distribution, has been attracting much attention in the fields of targeted drug delivery, environmental control, chemical agent detection, and smart device design. Here, we focus on studying the group control of colloidal made from a photo-responsive organic polymer molecule NO-COP (N,O-Covalent organic polymer). These colloidal motors mainly respond to the light intensity patterns. We chose a digital micromirror device (DMD) to modulate the structured light field shining on the sample, by considering its merit of fast refreshing speed, good programmability, and high-power threshold. It is found that under ultraviolet or green light modulation, such colloidal motors exhibit various group behaviors including group diffusion, group patterning, and group migration. The qualitative interpretation is also provided for these observations.
Keywords:
photo-responsive colloidal motors
; group behavior
; structured light
; digital micromirror device
1. Introduction
Structured light fields have increasingly contributed to the investigation of light-matter interactions, particularly with respect to active matter [1,2,3,4] which is a crucial and expanding field of research spanning disciplines such as physics, chemistry, mechanics, materials, and biology. Active matter is a category of non-equilibrium systems that consist of self-propelled units commonly found in artificial colloids and microorganisms such as bacteria, motor proteins, and green algae, which are capable of exhibiting a number of interesting group behaviors in their interactions with the environment [5], covering the macroscopic to microscopic scales.
Colloidal motors [6,7] are a class of particles capable of converting external energy into their own energy and performing some kind of motion, which are driven by chemical reactions [8] and various physical fields, such as light fields [9], electric fields [10], magnetic fields [11], and acoustic fields [12], among others. Chemical propulsion systems typically require a high concentration of fuel that can be quickly exhausted. Additionally, commonly used fuels such as hydrogen peroxide are toxic. Magnetic field and ultrasonic propulsion systems require high energy input and complicated experimental setups. Light-driven colloidal motors refer to colloidal motors powered by an optical field [13,14] and have received worldwide attention from researchers due to their high programmability, remote manipulation, tunable energy, and ease of operation.
Light-driven colloidal motors work due to the formation of a gradient light field around the colloidal motors, which is mainly due to either the asymmetric morphology of the colloidal motors themselves or the uneven distribution of the external light field. Common asymmetric morphologies include Janus-like [15], rod-like [16], tube-like [17], gear-like [18], etc., which undergo asymmetric chemical reactions under light to produce chemical products of non-uniform concentration, or convert light energy into non-uniform temperature field, electric field, etc., thus inducing non-counteracting forces to drive colloidal motions. The non-uniform external light field can be created by modifying the incident light’s angle of illumination, personalizing a template, or utilizing a device such as a spatial light modulator, which consequently facilitates the motion of the colloid motor [19,20,21]. The combination of various parameters (wavelength, intensity, polarization, etc.) of the structured light field and the colloidal motor system can stimulate many novel phenomena, which show attractive prospects for device design [22], biomedicine [23], and environmental treatment [24].
In this study, we applied two DMD-based optical systems (one works in ultraviolet LED, and the other works in green laser) to investigate the group behaviors of a specific colloidal motor made from NO-COP molecules, such as group diffusion, group patterning, and group migration. These observations and analysis are potential valuable for the further study of interaction between structured light fields and colloidal motors.
2. Materials and Experimental System
2.1. Materials
The samples we used were photo-responsive organic polymer colloidal motors made from polymer NO-COP, which can be prepared from the polycondensation reaction of cyanuric trichloride and barbituric acid at 180 °C for 48 hours [25].
The NO-COP colloidal motor is spherical and can emit fluorescence at multi-wavelength excitation, appearing green when shined by UV or blue light and orange by green light. It has a forbidden band width of 1.8 eV, coming from a valence band with a maximum energy of -0.16 eV, and a conduction band with a minimum energy of 1.64 eV. Under external illumination, the electron-hole accumulation occurs within the colloidal motor, which catalyzes the decomposition of water into protons (H+) and hydroxyl radicals (-OH). Since the diffusion of H+ in the water is faster than that of -OH, an ionic distribution around the surface of the colloidal motors will be formed. This process will lead to an electric field directed towards the colloidal motor, which will be responsible for the colloidal motor motion control.
2.2. Experimental System
In the current study, in order to investigate the group behavior of the NO-COP colloidal motors under the influence of illumination light intensity distribution, we used a DMD as the main device to modulate the structured light field. The DMD is docked with the Olympus inverted microscope in our experimental system.
As shown in Figure 1, we set up two experiment systems where one takes the LED as the light source and the other takes the 532 nm laser as the light source, respectively. As shown in Figure 1a, the LED light source (DC4100 from Thorlabs) is set at 365 nm and its output end is already pre-installed with a collimating lens. The LED light beam directly illuminates the DMD (V-7000 UV from ViALUX, Germany). which is loaded with a spatial pattern to modulate the light beam. Subsequently in the light path, a telescopic optics consisting of lens L1(f=400 mm) and a microscope objective shrinks the DMD-loaded pattern onto the sample. The sample is also illuminated by the microscope light source and imaged onto the CCD.
As shown in Figure 1b, another experiment system used the 532 nm single longitudinal mode solid-state laser (Torus532 from QUANTUM). Here a dichroic mirror (DM) instead of a beam-splitter (BS) is used. In the optical path, the 532 nm laser beam is reflected by mirrors M1 and M2, and then enters the beam expander. The expanded laser beam passes a liner polarizer LP and becomes vertically polarized. The DMD (V-9001 VIS from ViALUX, Germany) modulates the beam intensity distribution and the loaded pattern is subsequently passed through the first 4f optical system composed of the lens L1 and the lens L2 and the second 4f optical system consisting the lens L3 and the microscope objective and imaged onto the sample. The purpose of setting up the first 4f optical system is to create a plane where a spatial filter (APT) can be applied. The sample is also imaged onto CCD for observation.
3. Experiment Results and Discussions
3.1. Group Diffusion Behaviors of Colloidal Motors
With the experimental system as in Figure 1a, a circular pattern was loaded with DMD and projected onto the sample, and the colloidal motor distributions at different moments before, during, and after the DMD pattern loading were recorded as shown in Figure 2. It can be seen that once the DMD pattern loading is on, the colloidal motors within the circular light spot started to exclude each other and diffuse outward. Up to the 10 second, the total number of motors within the light spot reduced significantly compared to the starting at the 1.5 second. After the 10 second time point, the number decreasing of the colloidal motors were slowed down. It was observed that the colloidal motors far away from the light spot behave as Brownian motion. After 50 second, when the DMD loading is switched off, the colloidal motors started diffusing back into the empty space that had been created by the light spot illuminating.
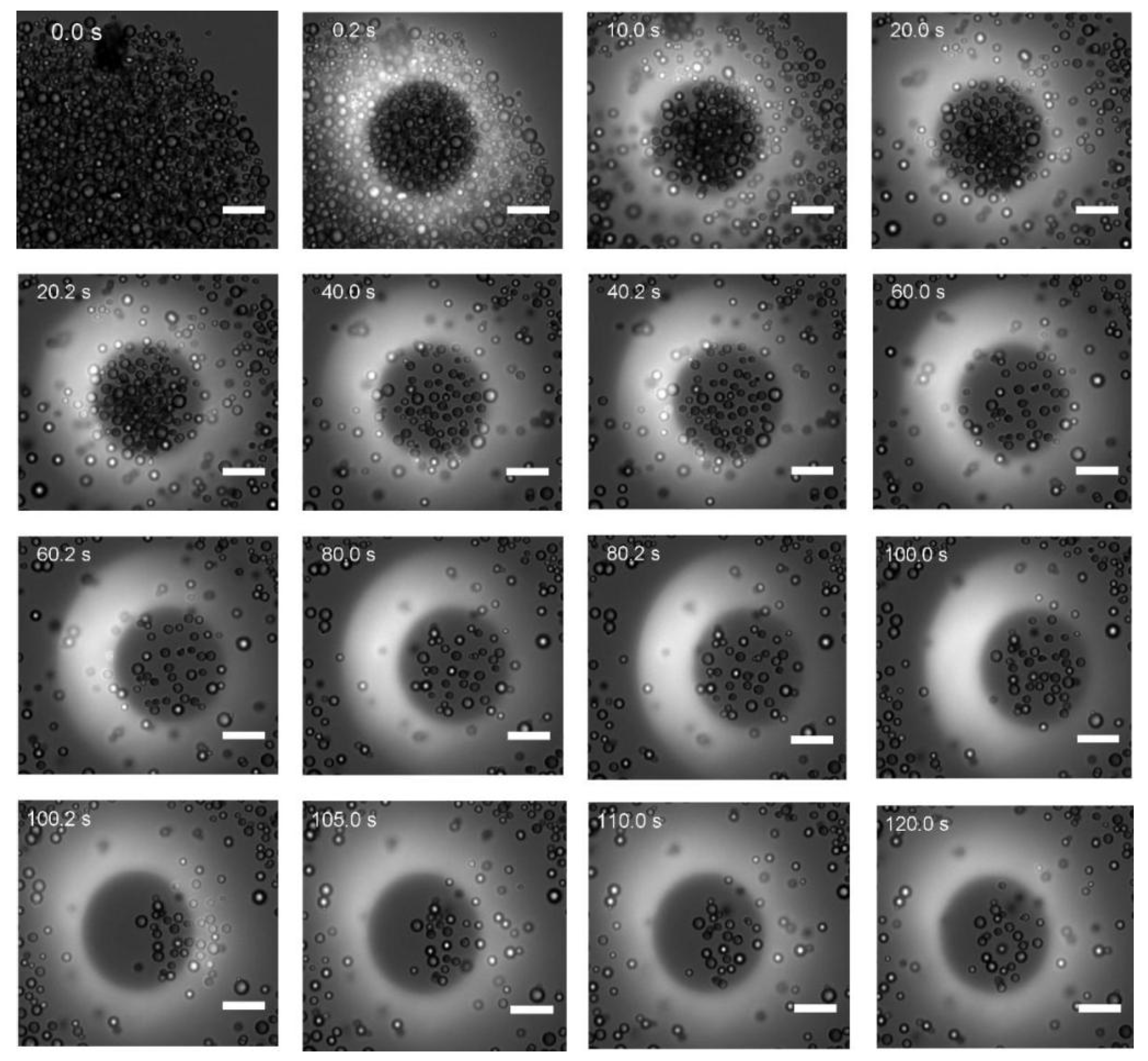
We performed the same experiment on the experimental system as in Figure 1b with the 532 nm laser. The situation when the circular light spot turned on and off is shown in Figure 3, which are similar to the observation shown in Figure 2 except that the higher magnify images were obtained. At the 51 second, the circular pattern is reprojected onto the sample and we saw that the phenomena of light extruding the colloidal motors repeated. Because this colloidal motor has a weak response to green light, it requires a higher laser power (1.96mw) to drive its motion, resulting in a brighter spot in the wide field images.
We attribute this special diffusion behavior to the self-diffusion swimming of the colloidal motors [26]. The light will catalyze the decomposition of water to H+ and -OH and formed the ion distribution layers where the H+ is further away from the light illumination region, thus creating an electric field directed towards to the region interior. If the surface of the individual colloidal motor is negatively charged, they will tend to move outwards from the light illumination region. To confirm this hypothesis, we measured the zeta potential of the colloidal motor which is -45.66 mV. Based on the Gouy-Chapman-Stern bilayer model [27], this negative zeta potential indicates the colloid has negative charge inside its compact layer. One way to verify such electrophoretic mechanism is to add a salt solution to deactivate the zeta potential [28,29]. When we added an appropriate amount of sodium chloride solution to the samples and found that the motion speed of the colloidal motors obviously decreased. In addition, the concentration of ionic products in the illuminated area is much larger than that in the unilluminated area, and the concentration difference between the inside and outside of the illuminated area will also form a concentration gradient force that affects the movement of the colloidal motors. These two mechanics add together and thus lead to the group diffusion behavior of the colloidal motors.
We further examined the motion trajectory of colloid motors, by applying ImageJ software on several representative colloid motors as shown in Figure 2 of the experiment with the UV light. The analysis results are displayed in Figure 4 where the trajectories up to 20 second are plotted. It is clearly shown that these colloid motors moved radially outwards from the center of the light spot.
We also investigate the optical power dependence of this diffusion behavior (The results are presented in Appendix A, Figure A1 and Figure A2). For the UV light experiment, at low power, the colloidal motors did not diffuse significantly, and the diffusion rate was slow. However, as the optical power increased, more photons were irradiated on the surface of the motor, stimulating more electrons and holes. This increased the photocatalytic reaction rate, enhancing the formation of the electric field for the motor group and improving the driving force, resulting in an increase in the group diffusion speed. For the green light experiment, similar to the UV light experiment, the distance between colloidal motors in the illuminated area increased, and the number of colloidal motors decreased with increasing light intensity, suggesting that the diffusion rate of colloidal motors increased.
3.2. Group Patterning Behaviors of Colloidal Motors
Based on the observation of light extruding effect of the NO-COP colloidal motor, we designed the experiment to drive the colloidal motor group to form the specific distribution pattern. As shown in Figure 5 for the UV-LED illumination, the distribution patterns of the circle ring (Figure 5a), the stripes (Figure 5b), and the two neighboring squares (Figure 5c) can be clearly seen.
We also applied the trajectory analysis using ImageJ software on the formation of these patterns up to 25 second. For the circle ring pattern, as shown in Figure 6a, most of the colloid motors originally sitting inside the light spot area moves radially outwards while most of the colloid motors originally sitting inside the center dark area undergo Brownian motion. For the stripe pattern, as shown in Figure 6b, it is interesting to see that the colloidal motors originally located at the outer two bright stripes tend to move perpendicular to the stripes while the colloidal motors originally located at the center bright stripes tend to move parallel to the stripes. For the two neighboring squares, as shown in Figure 6c, the colloidal motors originally near the internal two edges tend to move parallel to the edges. Currently, we did not have clearly explanation regarding all of these observations and it is certainly worth a further simulation study (such as those demonstrated in other colloid patterning behavior studies [30,31]).
Similar pattern forming can also be observed in the green laser experiment system. For example, Figure 7 shows the stripe pattern forming process with higher imaging resolution. We can see the empty space forms stripes with width only one or two colloids large. This means the colloid motors can response to high resolution light illumination patterns.
3.3. Group Migration Behaviors of Colloidal Motors
To demonstrate the potential application of the light response group behavior of the NO-COP colloidal motors, we performed the further experiment with the UV LED to actively migrate a group of colloid motors that can be trapped in the center dark region of the circular ring light pattern. As shown in Figure 8, started from the 20 second up to 100 second, the DMD pattern of the ring shape was horizontal shifted by 10-pixel to the right side every 20 seconds. During this slow light pattern switching, the colloidal motors trapped in the center dark region showed to move along with moving dark region. At the 100 second, we switched the DMD pattern back to the original place. As can been seen, after 20 seconds the previously trapped group of colloidal motors gradually moved back to the new center dark region.
4. Conclusions
With two DMD-based optical microscopy setups respectively using the UV LED and the green laser as the illumination light source, we successful recorded various group control motions of the NO-COP colloidal motors. The circular light spot experiments revealed the light extruding property of the colloidal motors, while the other three more complex light spots (circular ring, stripes, and two neighboring squares) showed more interesting detail of the motion behavior of the colloidal motors. The slow-moving circular ring experiment demonstrated the capability of the active migrating a group of the colloidal motors. Although the light extruding property can be understood by the electrophoretic property of the colloidal motors, further theoretical study is needed for explaining the motion trajectories observed for the complex light spot illumination. The method of colloidal motor group controlling we showed here may be useful for the micro-device design and the SERS detection.
Author Contributions
Conceptualization and methodology, Y.G. and H.F.; experiments, H.W. and D.L.; software, H.W. and D.L.; data analysis, H.W.; writing—original draft preparation, H.W. and D.L.; writing—review and editing, H.W., Y.G., and H.F.; visualization, H.W. and D.L.; project administration and funding acquisition, Y.G. and H.F.. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Natural Science Foundation of China (12074268), the Key Project of Guangdong Provincial Department of Education (2023ZDZX3021), and the Scientific Instrument Developing Project of ShenZhen University (2023YQ024).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Figure A1.
Effects of different optical powers on the diffusion behavior of NO-COP colloidal motor populations under the UV light, scale bar 10 μm. (a) 0.479 mw;(b) 0.617 mw; (c) 0.734 mw.
Figure A1.
Effects of different optical powers on the diffusion behavior of NO-COP colloidal motor populations under the UV light, scale bar 10 μm. (a) 0.479 mw;(b) 0.617 mw; (c) 0.734 mw.
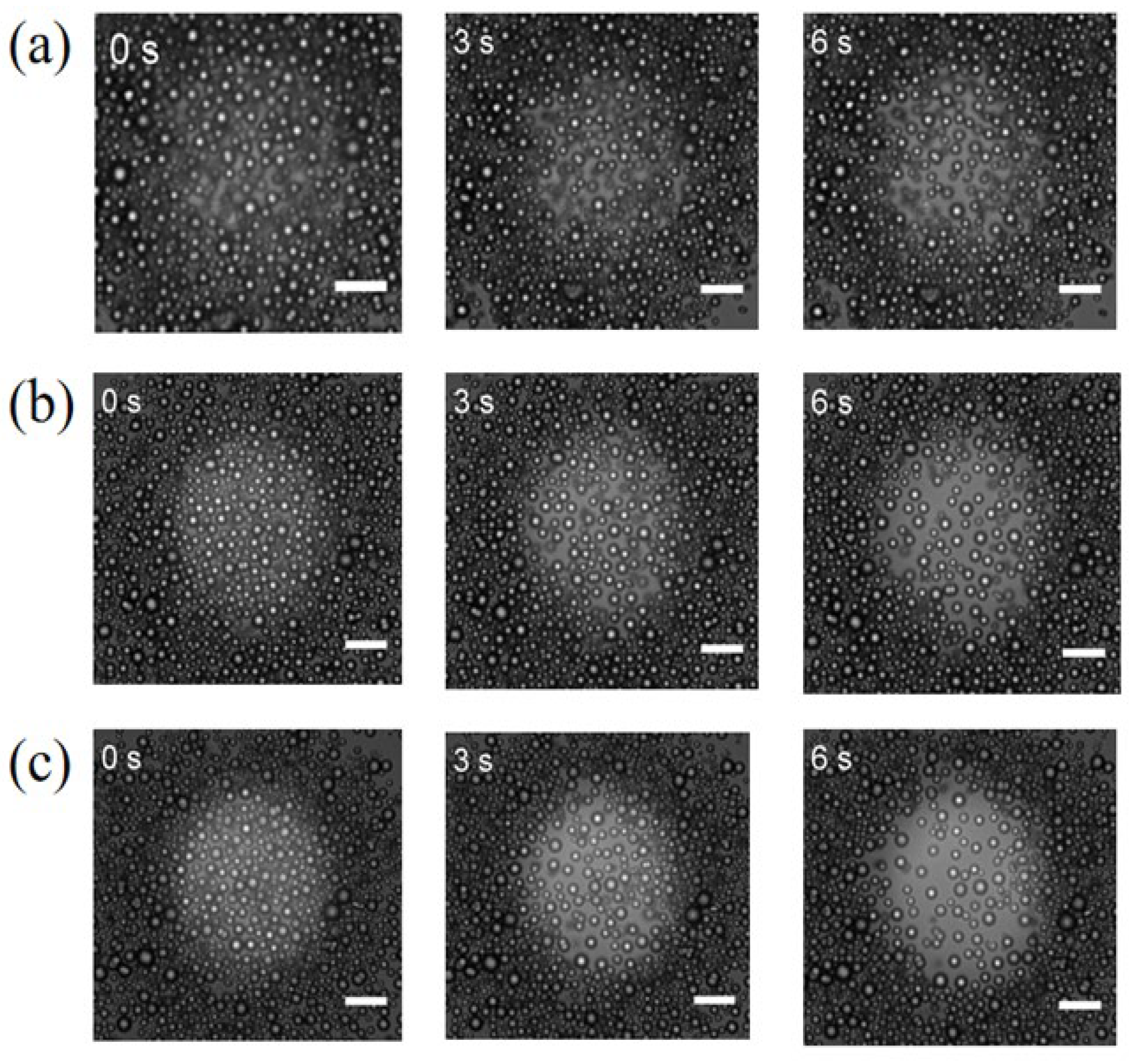
Figure A2.
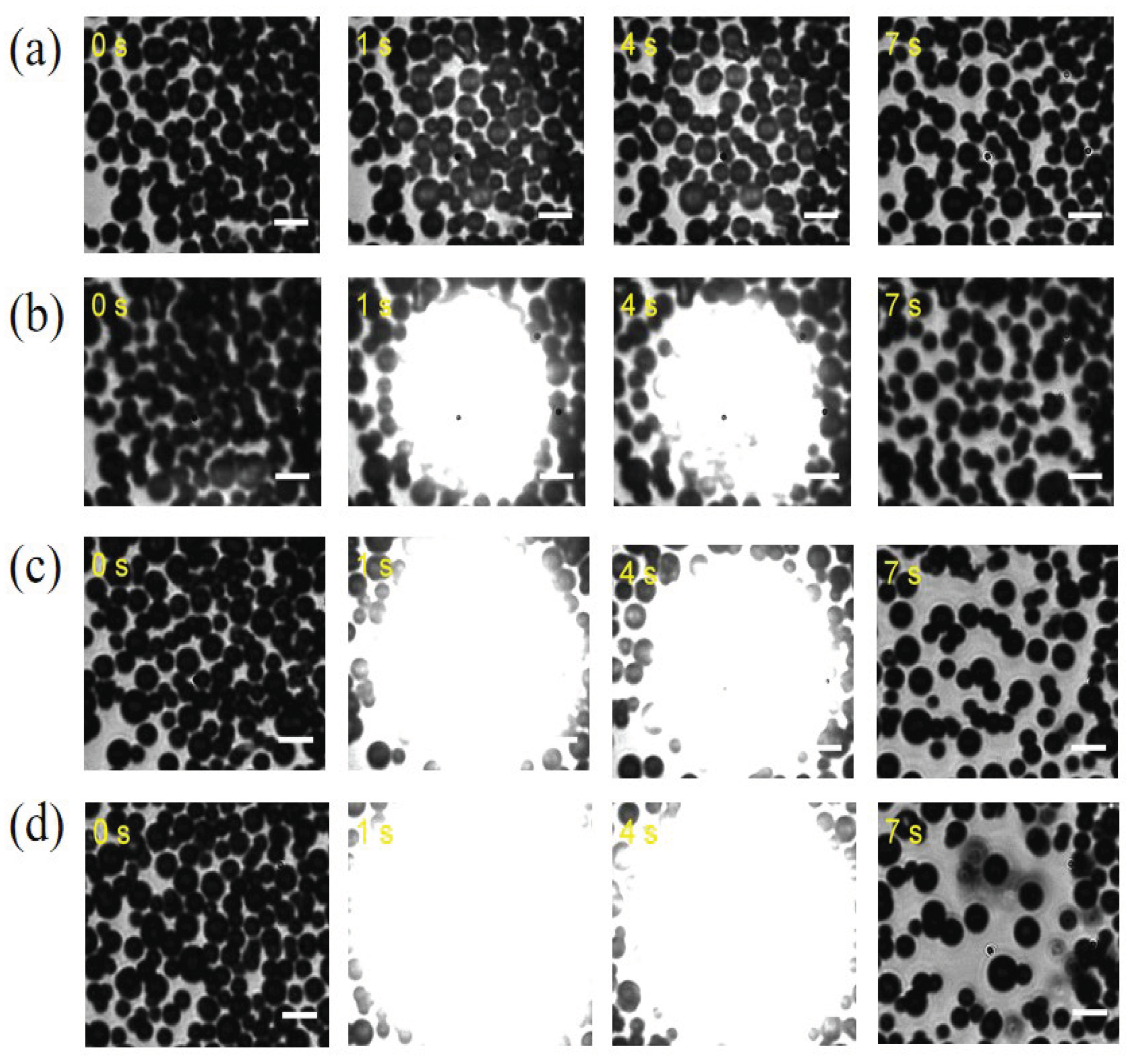
Effect of different optical powers on NO-COP colloidal motor motions under green light, scale bar 5 μm. (a) 0.148 mw;(b) 1.03 mw;(c) 3.12 mw;(d) 5.62 mw.
Figure A2.
Effect of different optical powers on NO-COP colloidal motor motions under green light, scale bar 5 μm. (a) 0.148 mw;(b) 1.03 mw;(c) 3.12 mw;(d) 5.62 mw.
References
- Bechinger, C.; Di Leonardo, R.; Löwen, H.; Reichhardt, C.; Volpe, G.; Volpe, G. Active Particles in Complex and Crowded Environments. Rev. Mod. Phys. 2016, 88, 045006. [Google Scholar] [CrossRef]
- Marchetti, M.C.; Joanny, J.F.; Ramaswamy, S.; Liverpool, T.B.; Prost, J.; Rao, M.; Simha, R.A. Hydrodynamics of Soft Active Matter. Rev. Mod. Phys. 2013, 85, 1143–1189. [Google Scholar] [CrossRef]
- Shankar, S.; Souslov, A.; Bowick, M.J.; Marchetti, M.C.; Vitelli, V. Topological Active Matter. Nat. Rev. Phys. 2022, 4, 380–398. [Google Scholar] [CrossRef]
- De Gennes, P.G. Soft Matter. Science 1992, 256, 495–497. [Google Scholar] [CrossRef]
- Vicsek, T.; Zafeiris, A. Collective Motion. Phys. Rep. 2012, 517, 71–140. [Google Scholar] [CrossRef]
- Nsamela, A.; Garcia Zintzun, A.I.; Montenegro-Johnson, T.D.; Simmchen, J. Colloidal Active Matter Mimics the Behavior of Biological Microorganisms—An Overview. Small 2023, 19, 2202685. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Zhou, C.; Wang, W. Colloidal Motors 101: A Beginner’s Guide to Colloidal Motor Research. Chem. – Asian J. 2019, 14, 2388–2405. [Google Scholar] [CrossRef]
- Wang, L.; Li, L.; Li, T.; Zhang, G.; Sun, Q. Locomotion of Chemically Powered Autonomous Nanowire Motors. Appl. Phys. Lett. 2015, 107, 063102. [Google Scholar] [CrossRef]
- Zhan, Z.; Wei, F.; Zheng, J.; Yang, W.; Luo, J.; Yao, L. Recent Advances of Light-Driven Micro/Nanomotors: Toward Powerful Thrust and Precise Control. Nanotechnol. Rev. 2018, 7, 555–581. [Google Scholar] [CrossRef]
- Xiao, Z.; Duan, S.; Xu, P.; Cui, J.; Zhang, H.; Wang, W. Synergistic Speed Enhancement of an Electric-Photochemical Hybrid Micromotor by Tilt Rectification. ACS Nano 2020, 14, 8658–8667. [Google Scholar] [CrossRef]
- Li, T.; Li, J.; Zhang, H.; Chang, X.; Song, W.; Hu, Y.; Shao, G.; Sandraz, E.; Zhang, G.; Li, L.; et al. Magnetically Propelled Fish-Like Nanoswimmers. Small 2016, 12, 6098–6105. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zhang, H.; Wang, D.; Gao, C.; Sun, M.; Wu, Z.; He, Q. Reconfigurable Assembly of Active Liquid Metal Colloidal Cluster. Angew. Chem. Int. Ed. 2020, 59, 19884–19888. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Xiong, Z.; Zheng, J.; Zhan, X.; Tang, J. Light-Driven Micro/Nanomotor for Promising Biomedical Tools: Principle, Challenge, and Prospect. Acc. Chem. Res. 2018, 51, 1957–1965. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Xiong, Z.; Tang, J. The Encoding of Light-Driven Micro/Nanorobots: From Single to Swarming Systems. Adv. Intell. Syst. 2021, 3, 2000170. [Google Scholar] [CrossRef]
- Palacios-Corella, M.; Rojas, D.; Pumera, M. Photocatalytic Pt/Ag3VO4 Micromotors with Inherent Sensing Capabilities for Corroding Environments. J. Colloid Interface Sci. 2023, 631, 125–134. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Yan, H.; Li, S.; Liu, Y.; Ran, P.; Chen, W.; Li, X. Janus Rod-like Micromotors to Promote the Tumor Accumulation and Cell Internalization of Therapeutic Agents. Chem. Eng. J. 2021, 404, 127073. [Google Scholar] [CrossRef]
- Wu, Z.; Si, T.; Gao, W.; Lin, X.; Wang, J.; He, Q. Superfast Near-Infrared Light-Driven Polymer Multilayer Rockets. Small 2016, 12, 577–582. [Google Scholar] [CrossRef] [PubMed]
- Maggi, C.; Saglimbeni, F.; Dipalo, M.; De Angelis, F.; Di Leonardo, R. Micromotors with Asymmetric Shape That Efficiently Convert Light into Work by Thermocapillary Effects. Nat. Commun. 2015, 6, 7855. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Zhang, J.; Peng, X.; Wu, Z.; Coughlan, A.C.H.; Mao, Z.; Bevan, M.A.; Zheng, Y. Opto-Thermophoretic Assembly of Colloidal Matter. Sci. Adv. 2017, 3, e1700458. [Google Scholar] [CrossRef]
- Yang, S.; Huang, M.; Zhao, Y.; Zhang, H.P. Controlling Cell Motion and Microscale Flow with Polarized Light Fields. Phys. Rev. Lett. 2021, 126, 058001. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Y.; Abuhaimed, G.N.; Liu, Q.; Smalyukh, I.I. Self-Assembled Nematic Colloidal Motors Powered by Light. Nat. Commun. 2018, 9, 5040. [Google Scholar] [CrossRef] [PubMed]
- Trivedi, M.; Saxena, D.; Ng, W.K.; Sapienza, R.; Volpe, G. Self-Organized Lasers from Reconfigurable Colloidal Assemblies. Nat. Phys. 2022, 18, 939–944. [Google Scholar] [CrossRef]
- Xuan, M.; Shao, J.; Gao, C.; Wang, W.; Dai, L.; He, Q. Self-Propelled Nanomotors for Thermomechanically Percolating Cell Membranes. Angew. Chem. Int. Ed. 2018, 57, 12463–12467. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Dong, R.; Wu, Y.; Gao, W.; He, Z.; Ren, B. Light-Driven Au-WO 3 @C Janus Micromotors for Rapid Photodegradation of Dye Pollutants. ACS Appl. Mater. Interfaces 2017, 9, 4674–4683. [Google Scholar] [CrossRef] [PubMed]
- Basharat, M.; Zhang, J.; Yu, N.; Li, R.; Zhang, Y.; Wang, Y.; Gao, Y. Reversible Assembly of Flexible and Switchable Active Colloidal Molecules from Binary Photoactive and Passive Spheres (Under Review).
- Popescu, M.N.; Uspal, W.E.; Dietrich, S. Self-Diffusiophoresis of Chemically Active Colloids. Eur. Phys. J. Spec. Top. 2016, 225, 2189–2206. [Google Scholar] [CrossRef]
- Usui, S. Interaction between Dissimilar Double Layers with like Signs under Charge Regulation on the Basis of the Gouy–Chapman–Stern–Grahame Model. J. Colloid Interface Sci. 2004, 280, 113–119. [Google Scholar] [CrossRef] [PubMed]
- Phys. Rev. Lett. 127, 168001 (2021) - Ionic Effects in Ionic Diffusiophoresis in Chemically Driven Active Colloids Available online: https://journals.aps.org/prl/abstract/10.1103/PhysRevLett.127.168001 (accessed on 21 December 2023).
- Brown, A.; Poon, W. Ionic Effects in Self-Propelled Pt-Coated Janus Swimmers. Soft Matter 2014, 10, 4016–4027. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.; Lin, Z.; Xuan, M.; Lin, X.; Yang, M.; Dai, L.; He, Q. Programmable Dynamic Shapes with a Swarm of Light-Powered Colloidal Motors. Angew. Chem. Int. Ed. 2021, 60, 16674–16679. [Google Scholar] [CrossRef] [PubMed]
- Straube, A.V.; Pagès, J.M.; Ortiz-Ambriz, A.; Tierno, P.; Ignés-Mullol, J.; Sagués, F. Assembly and Transport of Nematic Colloidal Swarms above Photo-Patterned Defects and Surfaces. New J. Phys. 2018, 20, 075006. [Google Scholar] [CrossRef]
Figure 1.
(a) Experimental system for LED light source (M1, M2 and M3 are mirrors; L2, tube lens; Objective, microscopic objective PlanApo60X from Olympus, NA=1.42). (b) Experimental system for 532nm laser light source. (L1(f=400 mm), L2(f=200 mm) and L3(f=400 mm) are lens; L4, tube lens; M1, M2, M3, M4 and M5 are mirrors; BE, 20x beam expander (GBE20-A from Thorlabs); Objective, microscopic objective PL L50X in inverted microscope LM200 from LAITE).
Figure 1.
(a) Experimental system for LED light source (M1, M2 and M3 are mirrors; L2, tube lens; Objective, microscopic objective PlanApo60X from Olympus, NA=1.42). (b) Experimental system for 532nm laser light source. (L1(f=400 mm), L2(f=200 mm) and L3(f=400 mm) are lens; L4, tube lens; M1, M2, M3, M4 and M5 are mirrors; BE, 20x beam expander (GBE20-A from Thorlabs); Objective, microscopic objective PL L50X in inverted microscope LM200 from LAITE).
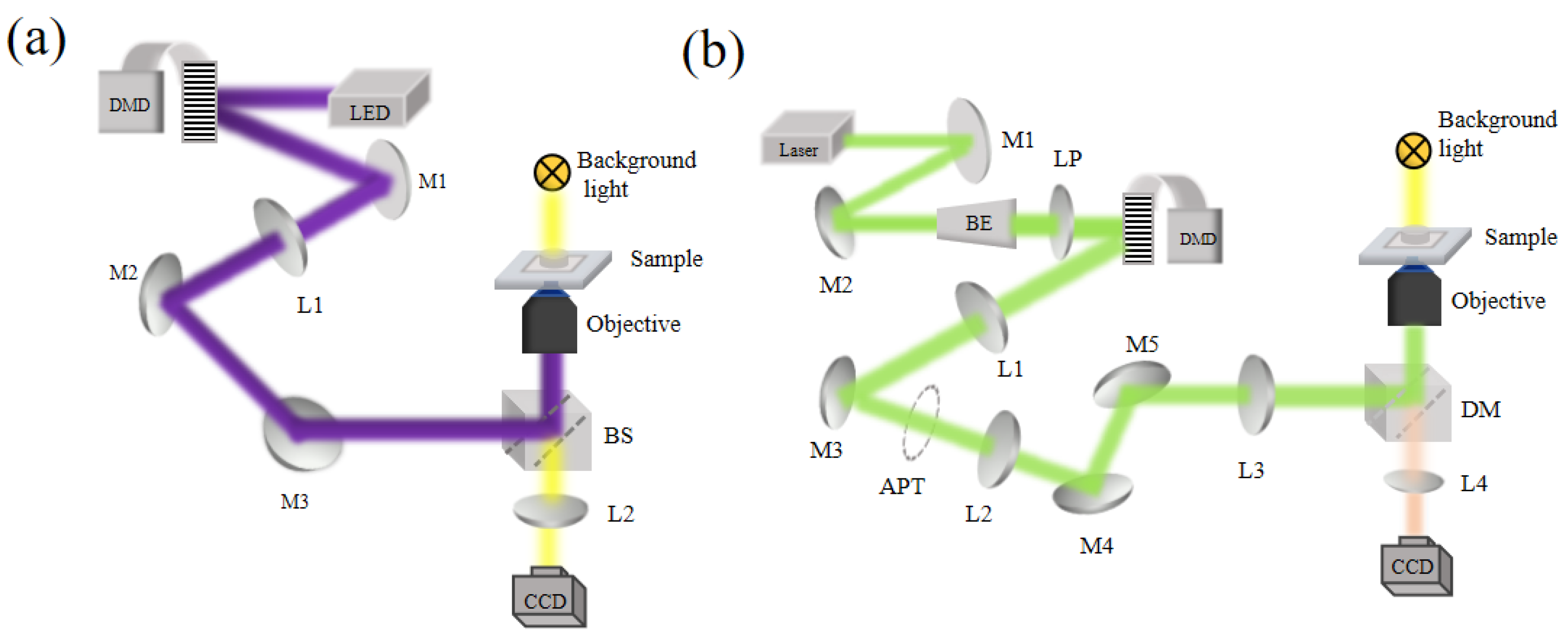
Figure 2.
Group diffusion behavior of NO-COP colloidal motors under UV light(0.734mw), image magnification:15×,scale bar 20 μm.
Figure 2.
Group diffusion behavior of NO-COP colloidal motors under UV light(0.734mw), image magnification:15×,scale bar 20 μm.
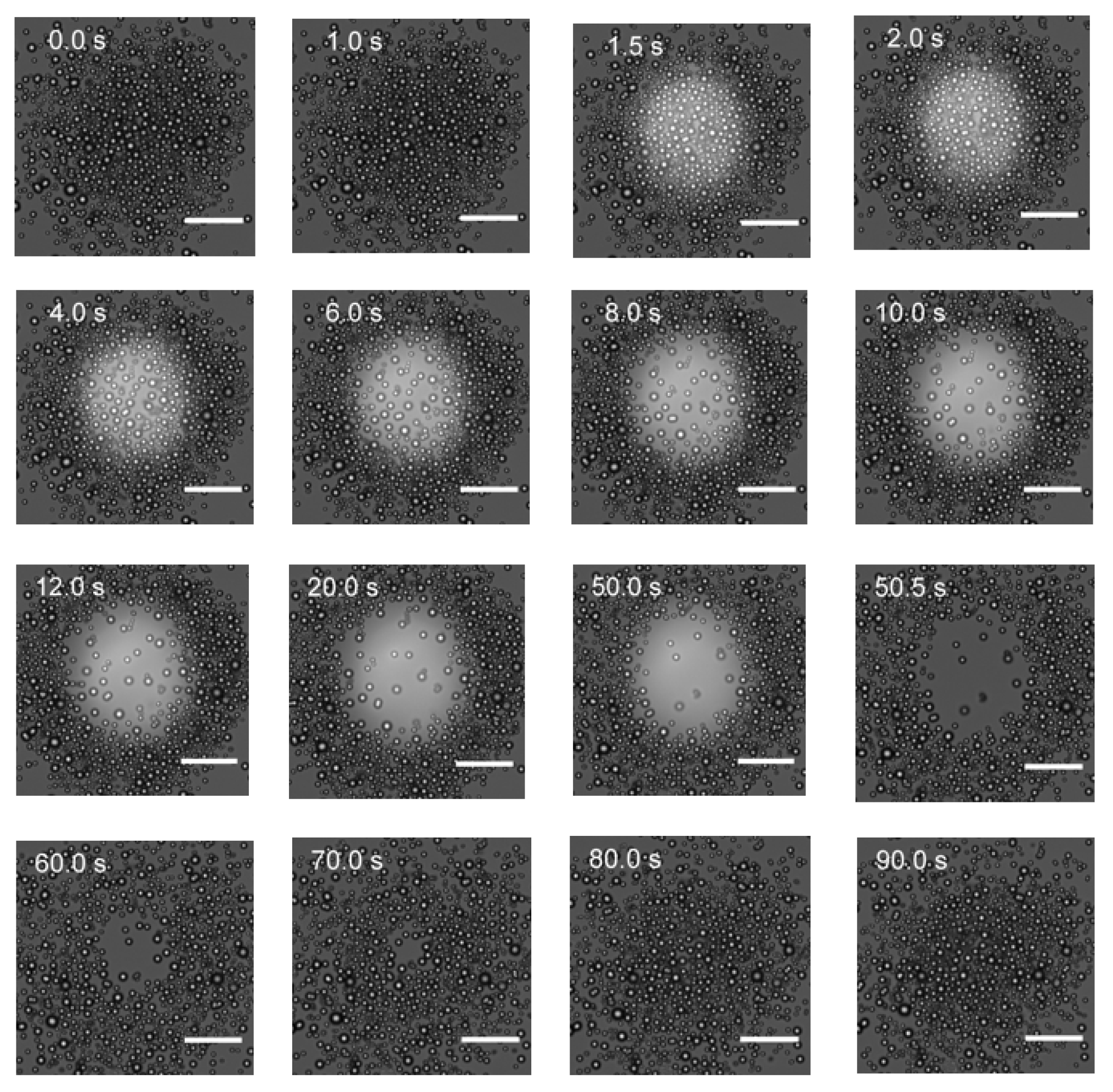
Figure 3.
Group diffusion behavior of NO-COP colloidal motors under green light(1.96mw), image magnification:50×,scale bar 5 μm.
Figure 3.
Group diffusion behavior of NO-COP colloidal motors under green light(1.96mw), image magnification:50×,scale bar 5 μm.
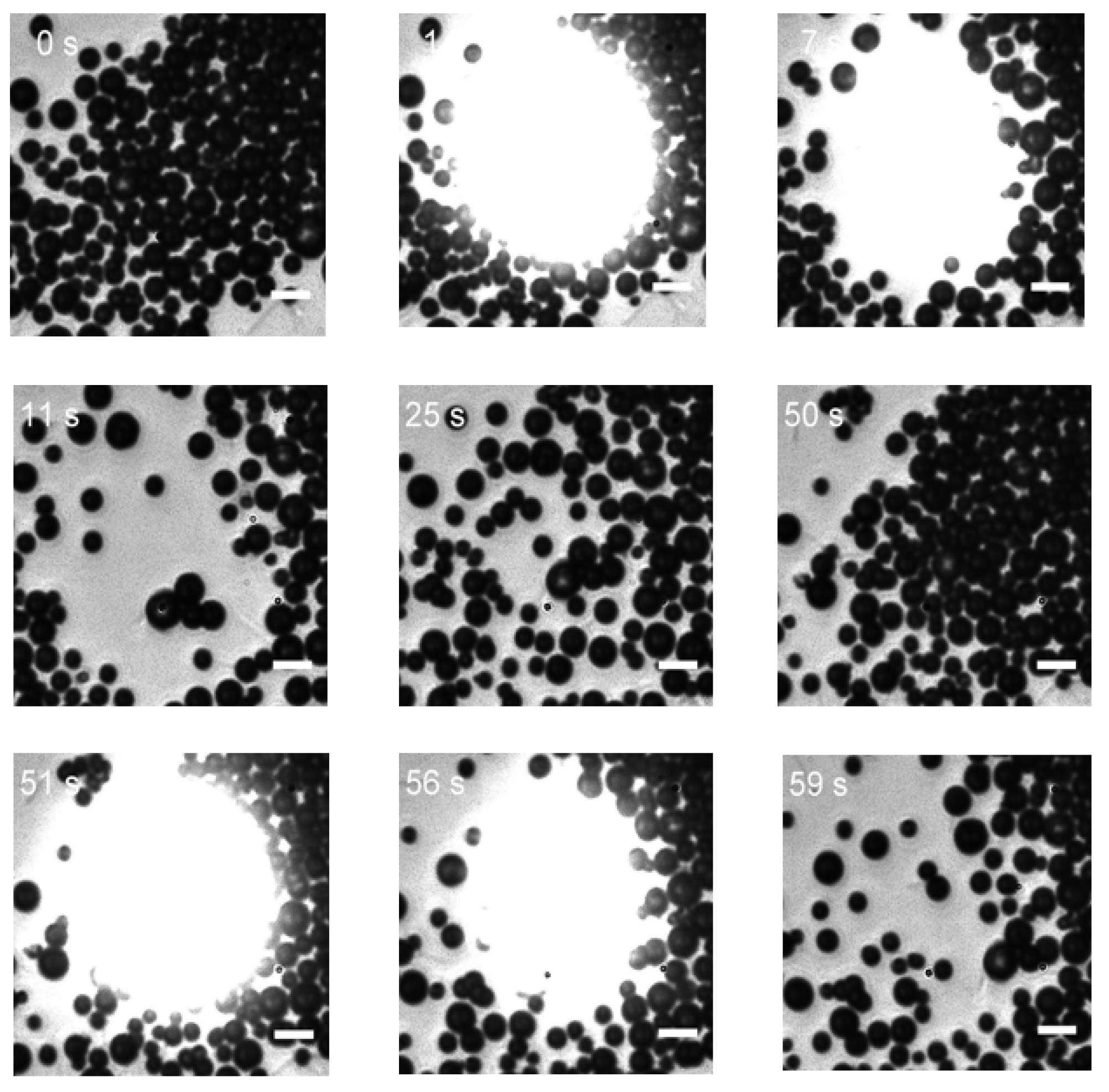
Figure 4.
Motion trajectory tracking of NO-COP colloidal motors under UV light in a circular light spot at 0, 5, and 20 seconds, scale bar 10 μm.
Figure 4.
Motion trajectory tracking of NO-COP colloidal motors under UV light in a circular light spot at 0, 5, and 20 seconds, scale bar 10 μm.
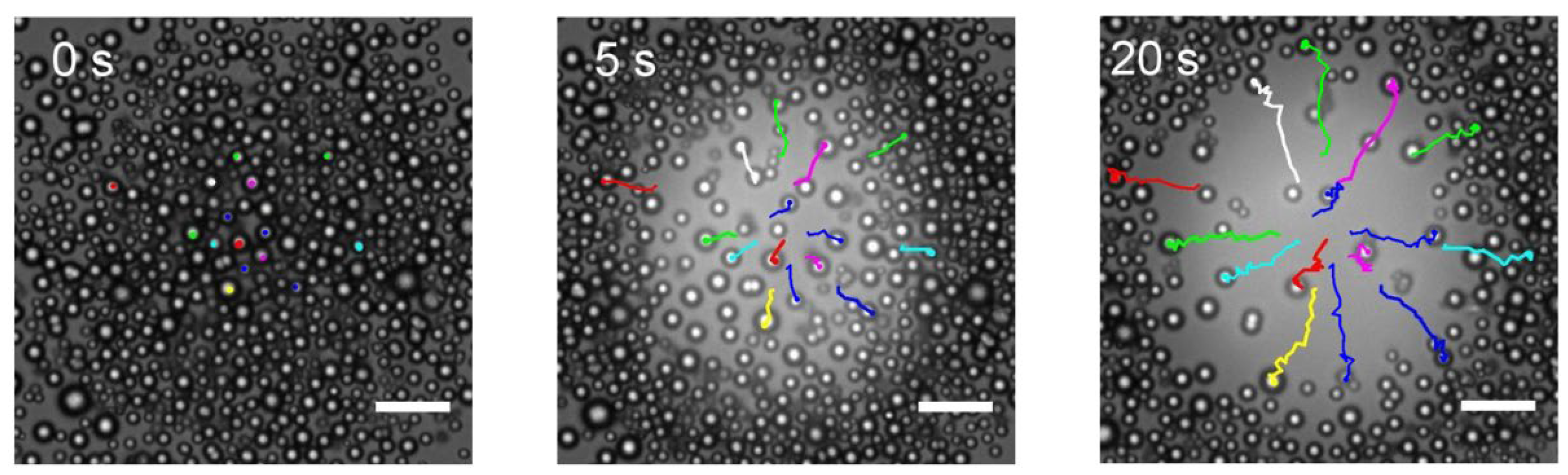
Figure 5.
Experimental results of population patterning of NO-COP colloidal motors when DMD is loaded with (a) circles, (b) stripes, and (c) two square patterns of the same size under UV light, scale bar 20 μm.
Figure 5.
Experimental results of population patterning of NO-COP colloidal motors when DMD is loaded with (a) circles, (b) stripes, and (c) two square patterns of the same size under UV light, scale bar 20 μm.
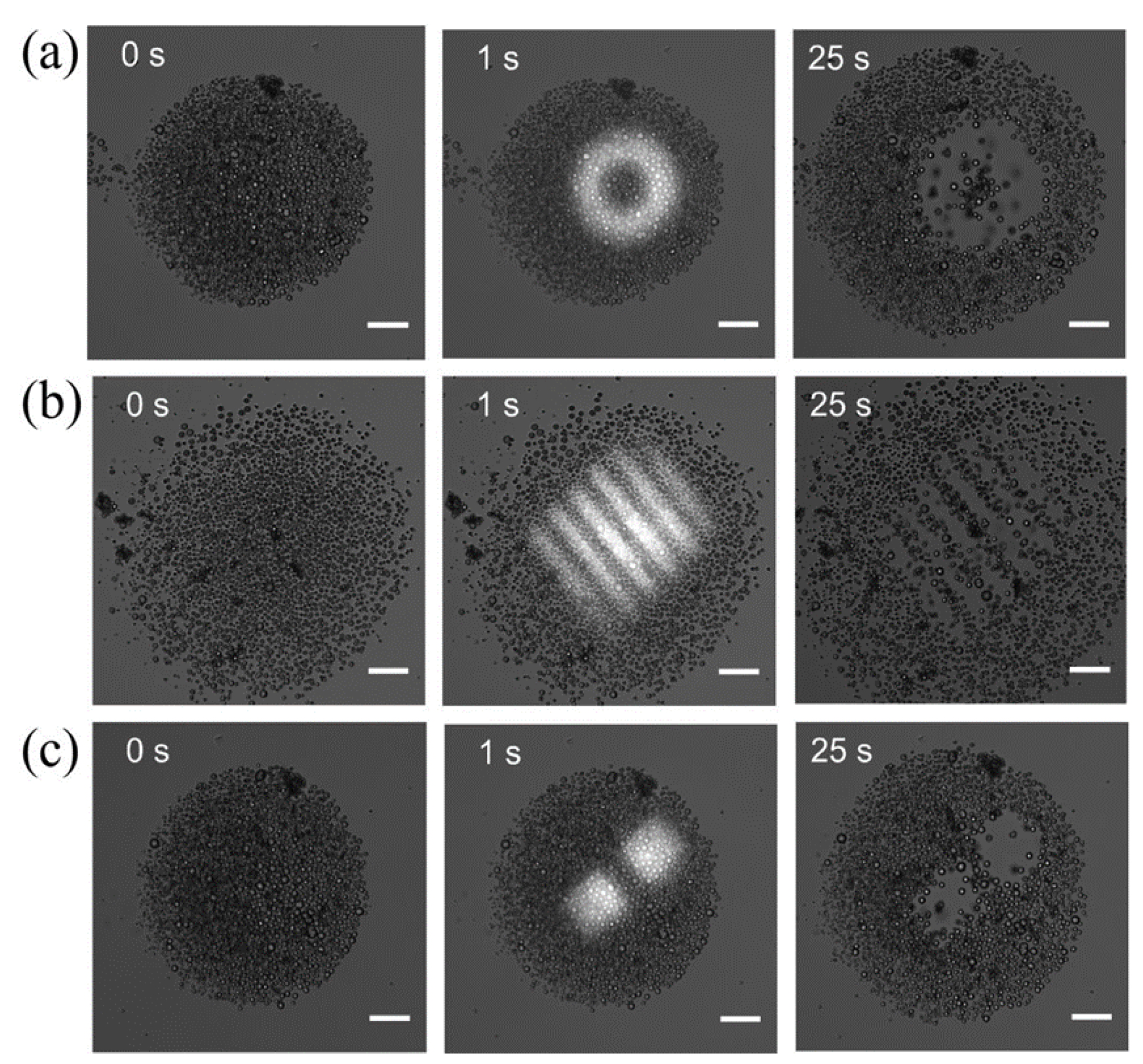
Figure 6.
Trajectory tracking of NO-COP colloidal motors during patterning, (a) circle; (b) stripe; (c) square, scale bar 20 μm.
Figure 6.
Trajectory tracking of NO-COP colloidal motors during patterning, (a) circle; (b) stripe; (c) square, scale bar 20 μm.
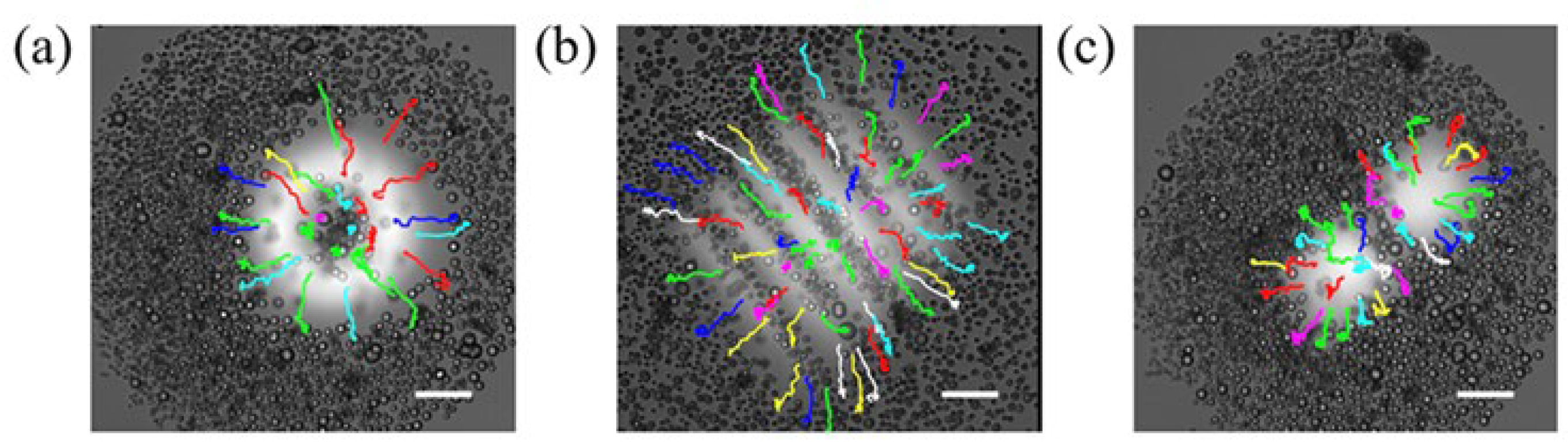
Figure 7.
Results of population patterning experiments of NO-COP colloidal motors after loading stripes under green light, scale bar 5 μm.
Figure 7.
Results of population patterning experiments of NO-COP colloidal motors after loading stripes under green light, scale bar 5 μm.
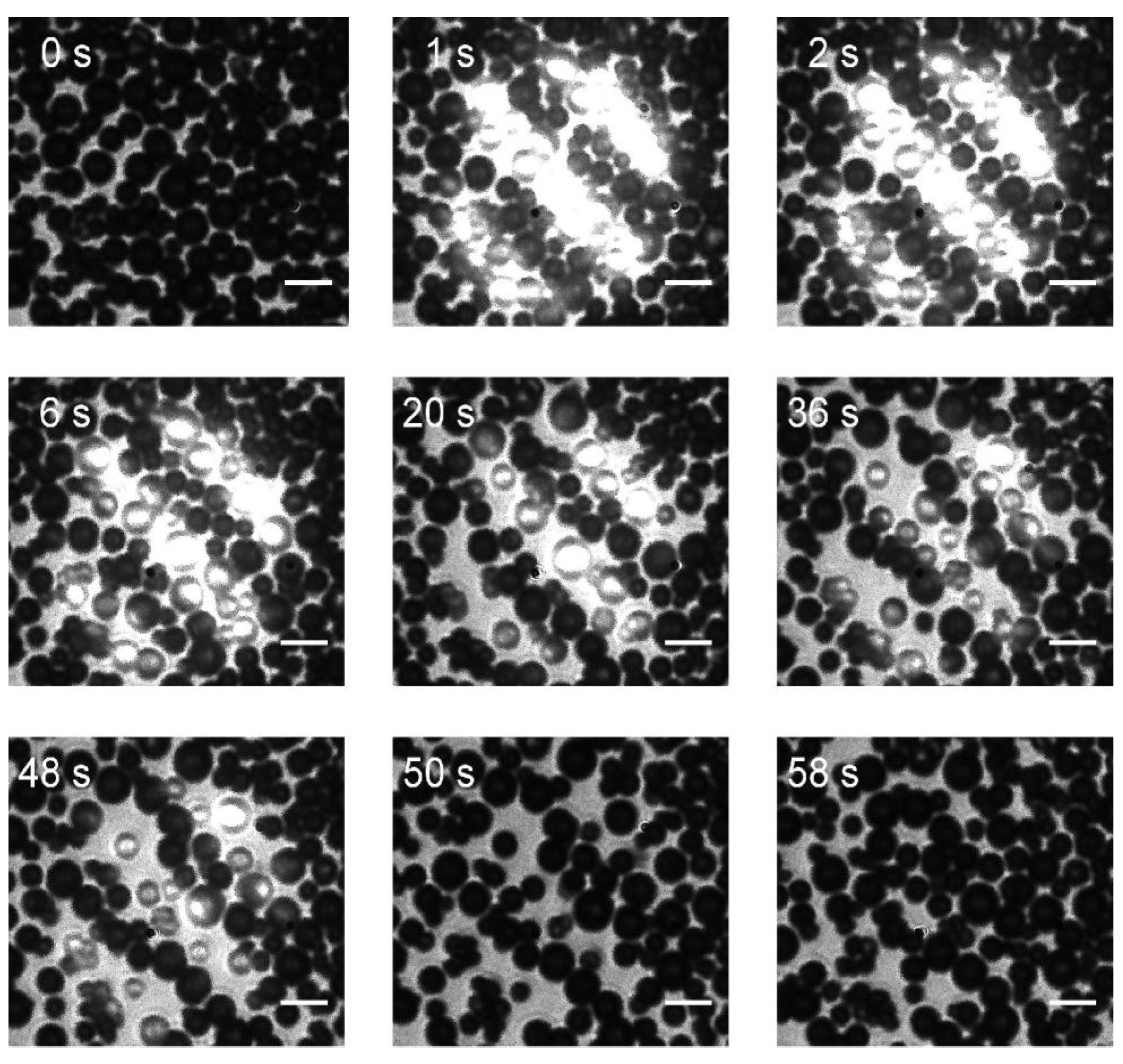
Figure 8.
Group migration experiments of NO-COP colloidal motors under UV light, scale bar 10 μm.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



