Submitted:
24 April 2024
Posted:
25 April 2024
Read the latest preprint version here
Abstract
In everyday life, the birth of a number of blind people takes place and millions of people are already available. Visually impaired people struggle to walk safely and in- dependently because they have trouble detecting obstacles. In this work, we suggest a novel approach to detecting obstacles utilizing an Arduino UNO board and an ul- trasonic sensor (HC-SR04). The main goal of this research is to increase the mobility and security of blind people in a variety of settings. The suggested system makes use of the HC-SR04 ultrasonic sensor’s capability to precisely measure distance and identify nearby obstructions. As the main processor component, the Arduino UNO board processes algorithms for real-time obstacle detection while also collecting data from the sensor. The device is intended to give the visually impaired user immedi- ate aural input while informing them of the location and proximity of obstacles. To Extensive testing is done in controlled and real-world settings to assess the system’s performance and dependability. In the studies, the effectiveness of obstacle detec- tion, the system’s response time, and its practicality and usefulness for blind people are all measured. The findings show that the suggested obstacle detection method provides very accurate obstacle identification at a safe distance. Users who are blind or visually handicapped may successfully understand their surroundings thanks to the aural feedback system, which helps them to navigate by making judgments that are well-informed. Additionally, the system responds quickly, guaranteeing that the user receives real-time obstacle updates to increase safety and confidence while mov- ing. The study’s conclusions demonstrate the possibility of using the Arduino UNO board with the HC-SR04 ultrasonic sensor as a practical and affordable approach for detecting obstacles.
Keywords:
Obstacle Detection
; Assistive Technology
; Mobility Aid
; Independent Navigation
; Sensor Integration
; Arduino UNO
; Ultrasonic sensor
1. Introduction
According to Socrates, vision is life. In everyday life, the birth of a number of blind people takes place and millions of people are already available. Due to this challenge, these people are left far beyond the beauty of the world.
In 2021 the World Health Organization held a survey (World Blind Union, 2017) according to which 285 million people are visually impaired. Due to this, these people depend on other people for the purpose of movement in an unknown environment. However, various challenges are associated, especially their executive cost. For in- stance, there are many international individuals with visual impairments who need assistance with outdoor mobility, also known as ODM.t (ODM). Most of them white cane was used for outdoor movement but it is used only for static obstacles. However due to the limited availability, and size, this cane is used to detect only static ob- stacles (SO) on a floor, not dynamic obstacles (DO). Another method used for blind people to guide them is (Dodds et al., 1981) service guiding dong, which has an asso- ciated annual cost of approximately $48000, due to which it is unaffordable for many poor people to assist them in unknown environments across the globe. Likewise, more dynamic objects and environmental factors (e.g., dynamic objects, best picture size, orientation, and different backgrounds) pose a significant challenge to the reliability of existing automakers’ assistive technologies for the outdoor mobility of blind people (ODOMOBP). These are specifically trained canines that assist persons who are blind in navigating obstacles by warning them about them and prompting them to alter their course. The intricate instructions the dogs give are only one of several drawbacks to this strategy. Additionally, this method only works for around five to six years until the dogs need to be replaced because of a natural occurrence. Due to their high price, these dogs are unaffordable for those in poverty. Additionally, it might be challenging for someone who is blind to give additional care to another living object.
After World War II, various gadgets were created to aid visually impaired persons in detecting objects. the obstacles that their environment presents. The goal of this project is to employ contemporary technology to develop a system that might assist persons who are blind or visually impaired in place of a white cane and a guide dog. The ultimate moral accomplishment is the application of technology for such goals. Numerous tools were developed to address this problem, however, they all have drawbacks in addition to their advantages. In this project, we’ll employ an ultrasonic system by taking inspiration from the bat’s natural navigation. High-frequency sound will be used, together with the reflection it receives after hitting the obstruction. Ultrasonic emitter and receiver—also known as ultrasonic sensors—will be used for this purpose. The rationale behind this since it is the most effective sensor for measuring distances, the ultrasonic sensor (Soni & Aman, 2018). A high-frequency sound will be made by the emitter. After being reflected by the barrier, it is picked up by the project’s receptionist and then sent to the processor for additional processing.
2. Literature Review
Blind pedestrians are limited in their capacity to walk since they are unable to recog- nise their surroundings. According to a WHO poll conducted in 2012, 285 million out of the world’s 7 billion people had deteriorated vision. 39 million of these 285 million people are completely blind. Out of 39 million people, almost 19 million are under the age of 15. This makes it clear that someone in the world goes blind every five seconds, and a youngster does so every minute. A project has been set up to help blind pedestrians walk more easily and, in particular, improve their capacity to find their surroundings. ”According to Strathotte et al. (1996), ”Wearable Systems have been created on the basis of novel technologies, including laser, sonar, or stereo camera vision for environment sensing and utilising aural or tactile stimuli for user input. To demonstrate some modern variations of such methods, consider the ”C-5 Laser Cane” (Benjamin & Ali, 1974), which uses optical triangulation to find obstructions up to a limit of 3.5 m ahead. It necessitates a survey of the immediate region and individual reporting on each nearby impediment utilising aural feedback. This system calculates the distance to the barrier, and a note is played correspondingly. In order to replace the cane as an obstacle detector, this technique was developed in the 1970s. In recent years, the University of Verona ”has expanded the use of stereoscopic cameras, a laser pointer, and an audio system altogether” (Fusiello et al., 2002). Another invention, known as Cy ARM (Ito et al., 2005), used a somewhat different approach. is also af- fordable, wearable, and both. New commercial devices are currently being introduced to the market, including the Ultra Cane (Cardin et al., 2006), which utilises a sonar system and a holder to communicate information to the user in the form of vibra- tions in accordance with the behaviour of obstacles. Talking Points (Stewart et al., 2008) is another innovation in the advancement of blind people’s capacity to recognize barriers. a device called I SONIC that can recognise obstructions at eye level (Fang et al., 2005). The Guide Cane, a company that provides travel help to the blind, a computer (Ulrich & Borenstein, 2001). ”At the moment, the majority of commercially available equipment and software technologies developed to maintain movement as- sistance rely mostly on the GPS, or Global Positioning System. These explanations, however, ”are not always trustworthy due to the low correctness, signal loss, and in- ability to work in indoor environments (Tapu et al., 2013),” the statement continued. ”The accuracy error of GPS (Global Positioning System) sensors can reach up to 40 meters (Chen et al., 2010) in urban areas with unusually high building densities. Due to this, it is extremely difficult for persons who are blind or visually impaired to go from one location to another, especially in strange locations, making it difficult for them to locate their destination. One of them is computer concept-based approaches, also referred to as ETA (Electronic Travel Aids), which organize a promising solution to deal with such issues. Hench et al. were able to secure one of the initial documents (Rodr´ıguez et al., 2012a). WritersFor assistance inside the fixed location, suggest a mix of sensor modalities (such as a foot-mounted pedometer, a 3-axis gyroscope, and a 2D laser scanner). It is possible to create a step-by-step diagram of the environment using visual Instantaneous Location fix and Mapping (SLAM) processes (Guerrero-Ib´an˜ez et al., 2018), (Manuel & Francisco Escolano Ruiz, 2005), which supply the user’s time- based position and three-dimensional coordination instantly. In (Vivek Pradeep et al., 2010), a high-fidelity visualization system that uses a six-degree of freedom ego move- ment algorithm to approximate a three-dimensional map of a region is described. The generated map is then utilized to identify top-level obstacles during user direction finding on this gadget, which employs a directing finding system for people who are blind or have visual impairments.
Shaded individuals are viewed as a superior group in culture, and as such, culture is required to extend them even more. attentiveness and care. so that they are superior, skilled, and capable of supporting themselves. Therefore, several gadgets are planned and available. So we deliberate and use a sharp cane to discover our way and detect obstacles. Their suggested gadget used infrared, ultrasonic, and water sensors (Manuel & Francisco Escolano Ruiz, 2008). For detection, the GPS and GSM module is also employed. enlighten step aside. This device’s shortcomings include being overly pricey, being non-foldable, and the requirement for internet access.
The voice provides intelligent awakening sticks for those who are blind (Guerrero- Ib´an˜ez et al., 2018). A practical walking pole is recommended for people who are shaded (Rangeetha. S et al., 2016). The gadget is made up of an Android handset, an output speaker, and RFID technology. An adaptable travelling tool is designed for use by people with vision impairments employing an audio-assisted ultrasonic sensor network nest (Liu et al., 2017).
The main approach explains the item version before confirming whether a pixel or an image cover is present and conforming the learned version. In (Oladayo, 2014), grayscale images are captured by a digital camera, and the pixels are then classified into objects or heritage based mostly on a neural community technique. The pixels are then replaced with those belonging to the obstacles because they are more appropriate. (Huang et al., 2015). employ a model for the most recent population’s colour vision to identify hurdles (Sainarayanan et al., 2007). Then, a new lens was installed in the car’s attention stereo camera, and it was utilized to determine the distance of a contempo- rary object in the middle. A method for appearance-based total hurdles identification was suggested in (Hub et al., 2004). The colouration image is first made clearer before being changed to HIS colour scheme. The applicant’s area’s colour histogram is then calculated and finished with respect to the histogram. The second approach is entirely centred on classifying new objectless and identifying regions with the best object-ness practices. The authors of introduced a technique for hurdle avoidance based on stereo vision and crude land aircraft detection (Ulrich & Nourbakhsh, 2000). Pay attention to the needs of the visually challenged consumer today. Traditional RGB camcorderstechniques use shadow, constriction, and light sensitivity to draw certain fundamental boundaries. Using a stereo camcorder is expensive and requires very specific modifi- cations. New RGBD sensors with minuscule values (like the Micros Mordent Kinect) were primarily used to provide depth to RGB statistics, which helped build significant brand-new item detection functionality. In (Rodr´ıguez et al., 2012b) , a system inter- prets data from Kinect as a three-dimensional contact cloud before finding the land vehicle and the modern-day volume in front of an ultra-modern individual. There is a barrier at the house. The author of offered a technique for gathering depth and colour (Bernabei et al., 2011). The sensor-help rod for shaded people was recommended by the study.
3. Materials and Method
To determine the percentage of blind persons in District Mardan, we organized a survey. However, before we begin our survey, we will first provide a brief overview of the location in which it will be conducted.
3.1. Area of Description
The second-largest district in Pakistan’s Khyber Pakhtunkhwa (KPK) is Mardan. It is actually a group of tiny communities that came together and functioned as a sizable administrative unit. (Mardan, Pakistan, coordinates) (latlong.net)
3.1.1. Map3.1.2. Literacy
Male and female residents of district Mardan have a literacy rate of 36.45% among those who are 10 years of age and older. Since 1981, when it was only 15.95%, it has increased by a factor of 20.50%. According to the survey (Khyber.ORG, 2005) site, the male literacy rate is significantly higher at 53.50% per cent compared to 18.38% per cent for women.
3.1.3. Climatic Circumstances
The summer months are extremely/extremely hot. Mardan district temperature has increased to 45 or 44 degrees. Unexpected temperature increases were seen from May through June. Even the months of July, August, and September have relatively high temperatures. In June and throughout May, nighttime dust storms are typical. June is the month with the highest temperature, at 45 °C (110.3 °F). Due to extensive farming and artificial irrigation, the region is humid and hot (warmth index of 69 on July 7, 2006).
3.2. Survey of Blind Peoples in District Mardan, Pakistan
3.2.1. Survey Details
In order to determine the number of blind persons who visit a location within a specific period of time in the district of Mardan, we conducted a thorough survey by visiting several hospitals and public locations. In addition, we personally visited blind persons to collect their information using a form we had created in order to learn more about blind people. We will present a different bar graph and a brief explanation for each percentage.

Table 1.
Ratio of blind peoples in district Mardan.
| Place | Total people visiting/day | Duration (Days) | No. of Blind Visiting | No. of Blind visiting per day |
| MMC | 5000 | 1 | 4 | 4 |
| DHQ Mardan | 4500 | 1 | 3 | 3 |
| Public store 1 | 2000 | 7 | 2 | 0.29 |
| Public store 2 | 3000 | 7 | 3 | 0.43 |
| NRC Mardan | 1500 | 7 | 2 | 0.29 |
| Hospital 1 | 500 | 15 | 1 | 0.07 |
| Hospital 2 | 300 | 15 | 1 | 0.07 |
| Total | 16,800 | 8.15 |
From the above table, we find out that the ratio of blind people in district Mardan is 0.049%.
3.2.2. Percentage of Literate and Illiterate3.2.3. Percentage of Male and Female3.2.4. Percentage of Dependent and Independent3.2.5. Percentage of Natural, Accidental and Disease Blind Percentage of Poor and Rich3.2.6. Percentage of Single and Married3.2.7. Percentage of Blind According to Devices used for Movement
4. Result and Discussion
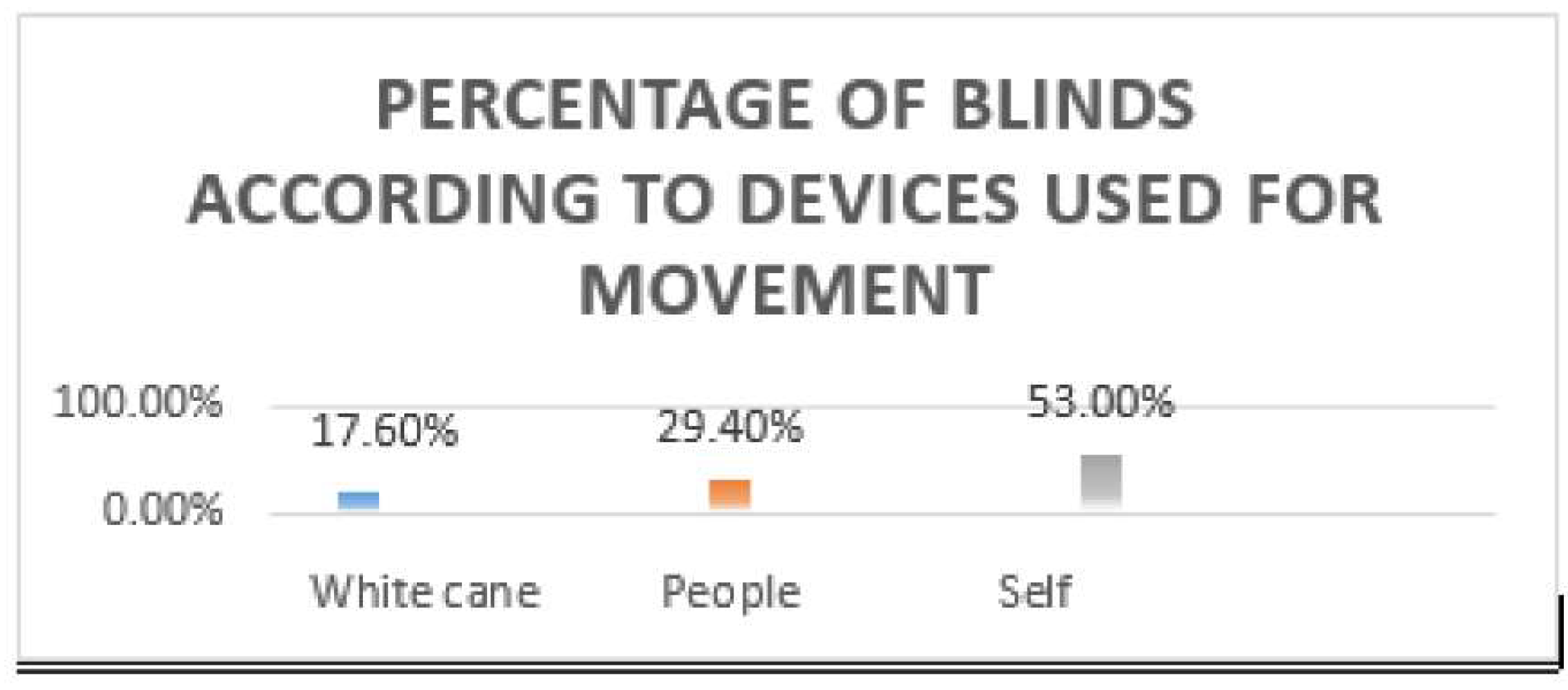
The study’s findings show that 17.6% of participants carry a white cane when going out on their own. In their typical settings, including homes, schools, and other places, 53% of persons claim to not use any obstacle detectors. Although there are other ob- stacles in their path, motorcycle and bicycle crashes are the most significant. Most participants said they had never used an electronic travel aid but were really enthused about it since it would be highly useful to them. The cheap electronic detector piqued the curiosity of the majority of attendees. We have created a model of obstacle de- tection for blind people using an Arduino microcontroller and an ultrasonic sensor that is inexpensive and available to all the society’s needy members.and less fortunate individuals. The project’s objective is to enable blind people to participate in society as independent individuals. This kind is easy to make and may be customised for the wearer. We utilised the Arduino board and other components as inexpensively as we could, as indicated by our survey, which discovered that a sizable portion of the blind in district Mardan are poor. It is helpful in locating a variety of barriers, particu- larly those that are in your mind’s way. The head impact is a dangerous event that could impair memory over the long term. So the participants’ first priority is to pre- vent head impacts. Our decision to put the sensor at eye level was motivated by this. Even though we may be able to recognise numerous obstacles The type of obstacle, its position, shape, size, or any other characteristic are not specified by our model. Furthermore, it only detects objects that are one to five metres in front of it. Addi- tionally, it just identifies the approaching obstacle without providing any assurance of security, leaving the blind person to deal with it on their own. The alarm system is effective because it adjusts sound loudness in direct proportion to how far away the barrier is, but it is ineffective for people with hearing impairments. Additionally, we made an effort to write as simple a piece of code as we could for Arduino. Addition- ally, the ultrasonic sensor is highly accurate and cost-effective.priced. The connections are rather simple. It can be repaired once it has been damaged, even by a novice. Our chosen solution has the advantage of not requiring complex electronics expertise, which would be perplexing to a blind pedestrian. Only two or three days of practise are needed before it can continue to alter the world for the blind because it is so simple to operate.
5. Conclusions
The conclusions deducted from the above study have two stages; one conclusion is from the survey that we have made and the other is about the device and its prevalence. We will make bullet points to write these conclusions:
The combination of an electronic aid system using an Ultrasonic Sensor (HC-SR04) and Arduino UNO emerges as a ground-breaking solution to empower visually im- paired people to navigate unfamiliar environments at a time when technology is re- defining the boundaries of accessibility and inclusivity. This study examined the cre- ation and use of this assistive technology, illuminating its ramifications, benefits, dif- ficulties, and potential future paths.
The process of developing, prototyping, and perfecting the electronic tool high- lighted its importance in meeting a pressing need in the community of people who are visually impaired. The electronic assistance gives users a fresh degree of flexibility and mobility by utilizing the HC-SR04 sensor’s capacity to deliver real-time distance readings. The system’s user-centred design, which includes a straightforward interface and understandable feedback methods, makes sure that it is usable by a variety of people, independent of their level of technological expertise.
Beyond physical support, the advantages of technological aid are numerous. Users may comfortably navigate uncharted territory, avoid hazards, and make wise judg- ments, improving their general quality of life. Additionally, it is clear that the initia- tive has the potential to have a beneficial psychological impact since greater mobility encourages a sense of empowerment, self-reliance, and confidence that benefits users’ emotional well-being.
While this study endeavour revealed the enormous potential of electronic assistance, it also pointed out a number of areas that needed refinement and more investigation. Accuracy issues, user interface improvements, interaction with other assistive tech- nologies, energy efficiency issues, and ethical issues continue to be development’s key focus areas.
This project’s completion is not only a point in time. Accuracy issues, user interface improvements, interaction with other assistive technologies, energy efficiency issues, and ethical issues continue to be development’s key focus areas.
As this project comes to a close, it serves as a starting point for more sophisticated and advanced versions of the electronic help. The goal is to develop a comprehen- sive navigation system that smoothly fits into users’ lives while utilizing developing technology and feedback from the community of people who are visually impaired to improve its features over time.
In summary, this research provides an example of how technology may be used to improve society when it is used for good. The electronic tool that uses an Ultrasonic Sensor (HC-SR04) and an Arduino UNO is an example of how innovation has the ca- pacity to close gaps, empower people, and build a more inclusive society. As technology develops further, In the end, this will lead to a world where people who are blind may go around unfamiliar situations with a greater sense of confidence, independence, and dignity.
Figure List
Figure 1.
Block diagram of the system.
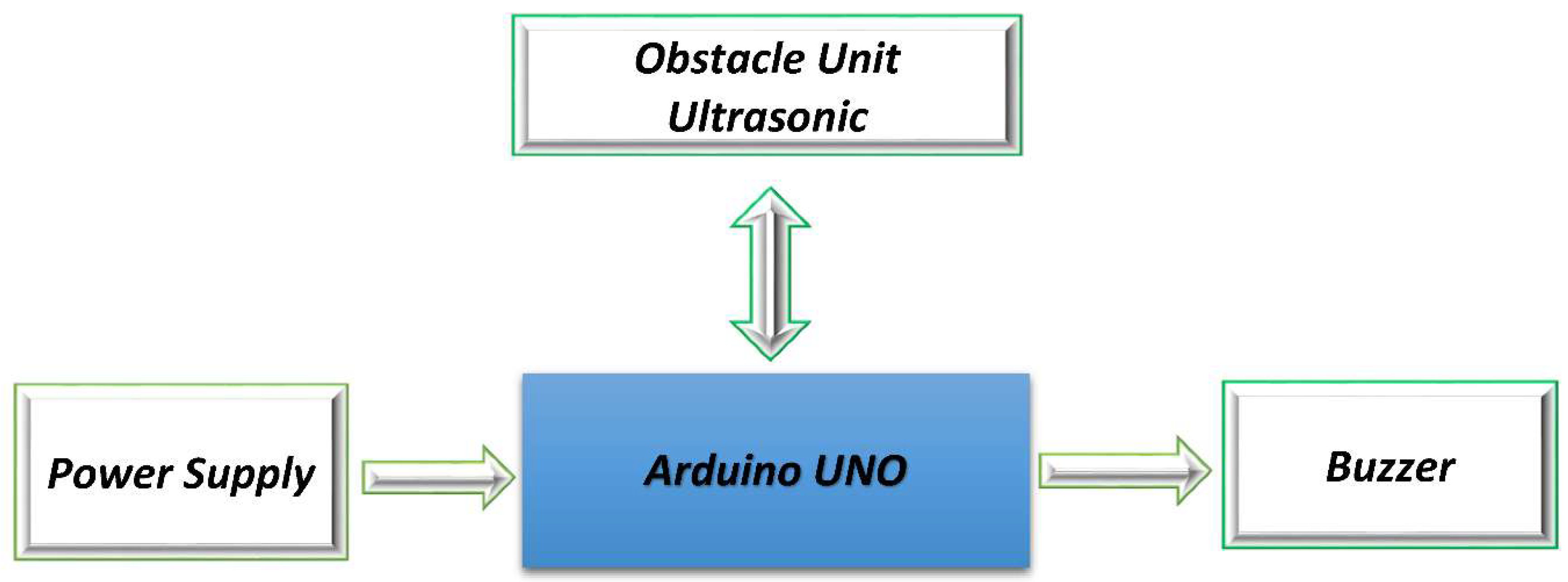
Figure 2.
Map of Mardan District (Map of district Mardan, KPK, and Pakistan. Research gate.2018.uploaded by Luqman Khan).
Figure 2.
Map of Mardan District (Map of district Mardan, KPK, and Pakistan. Research gate.2018.uploaded by Luqman Khan).

Figure 3.
Percentage of literate and illiterate.
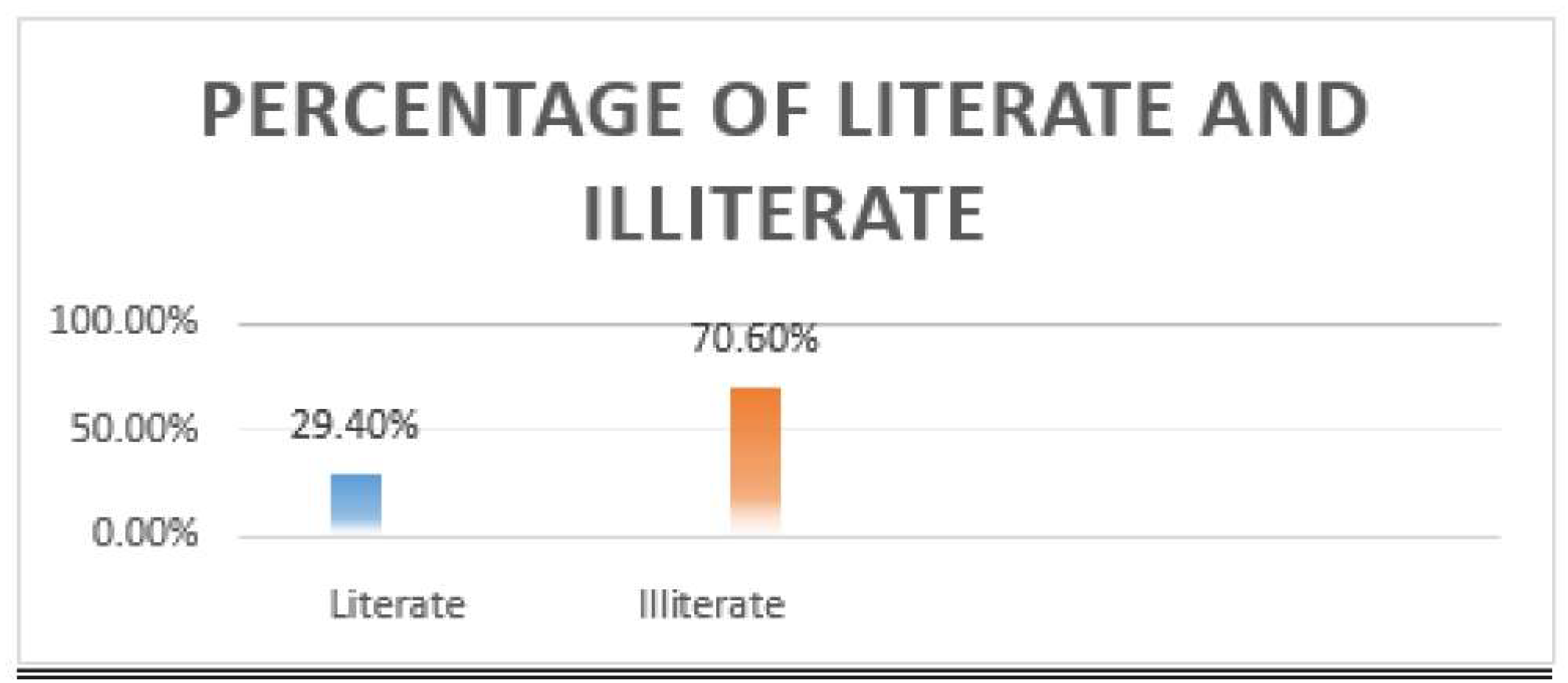
Figure 4.
Percentage of Male and Female.
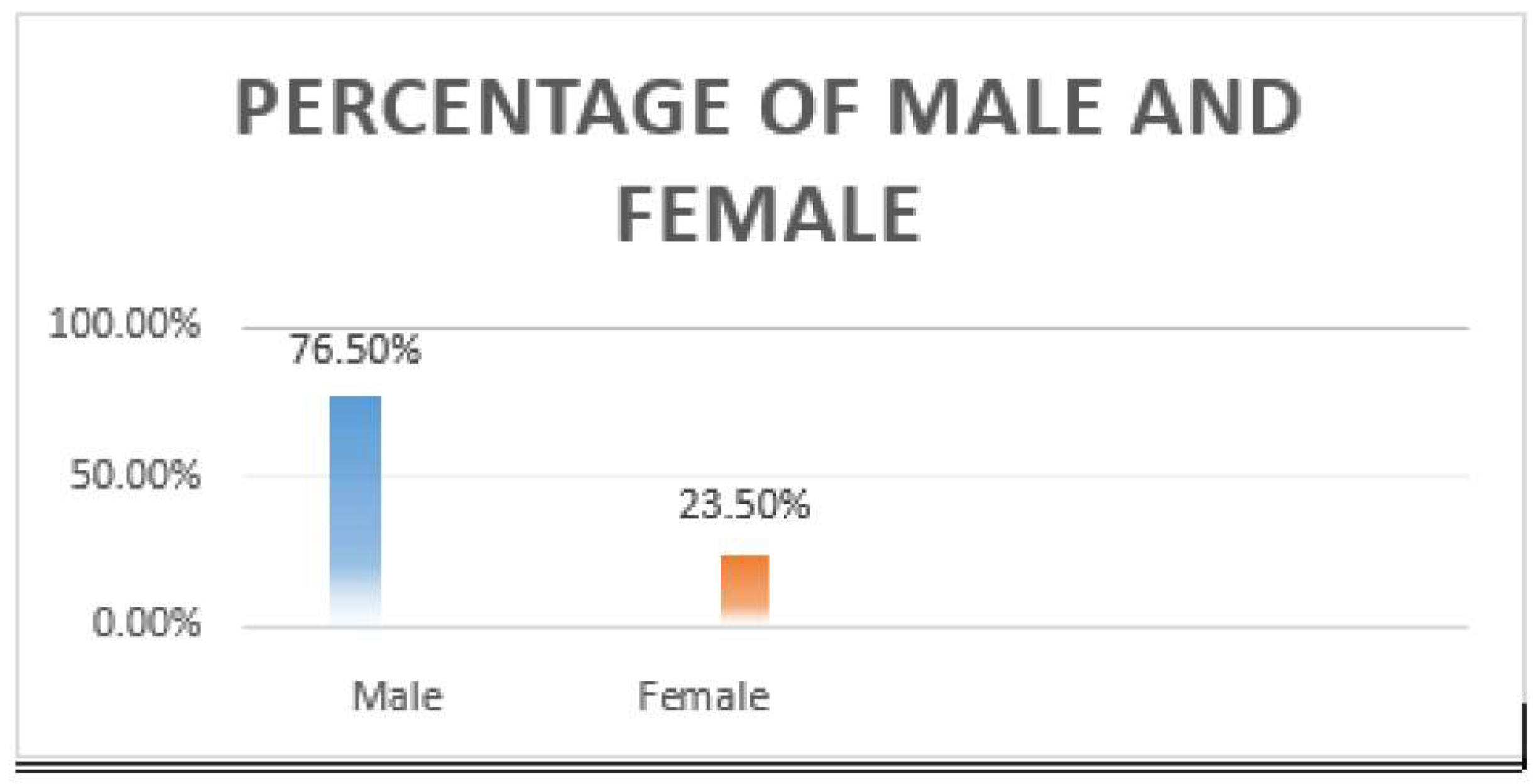
Figure 5.
Percentage of dependent and independent.
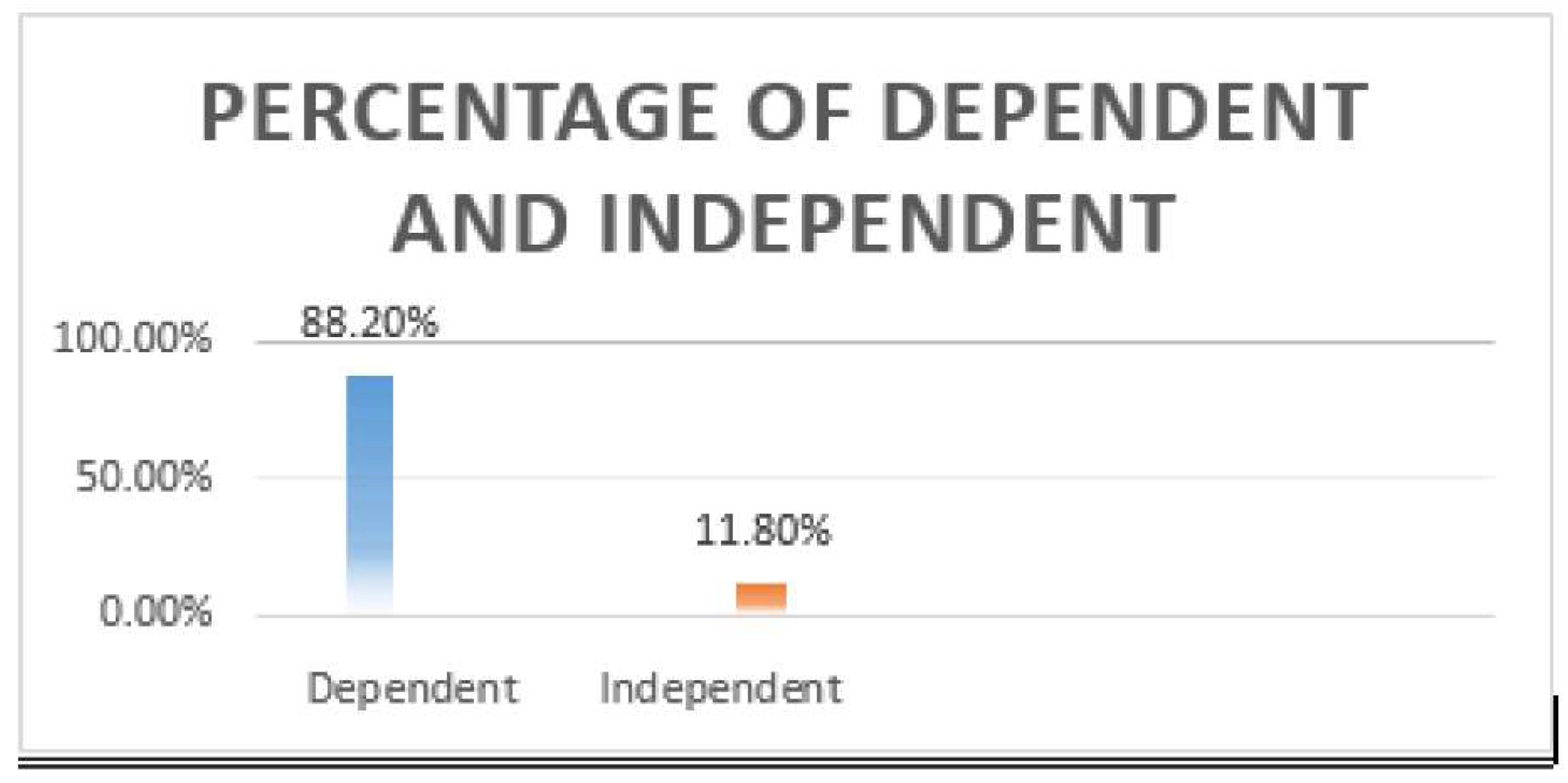
Figure 6.
Percentage of Natural, Accidental and Disease blind.
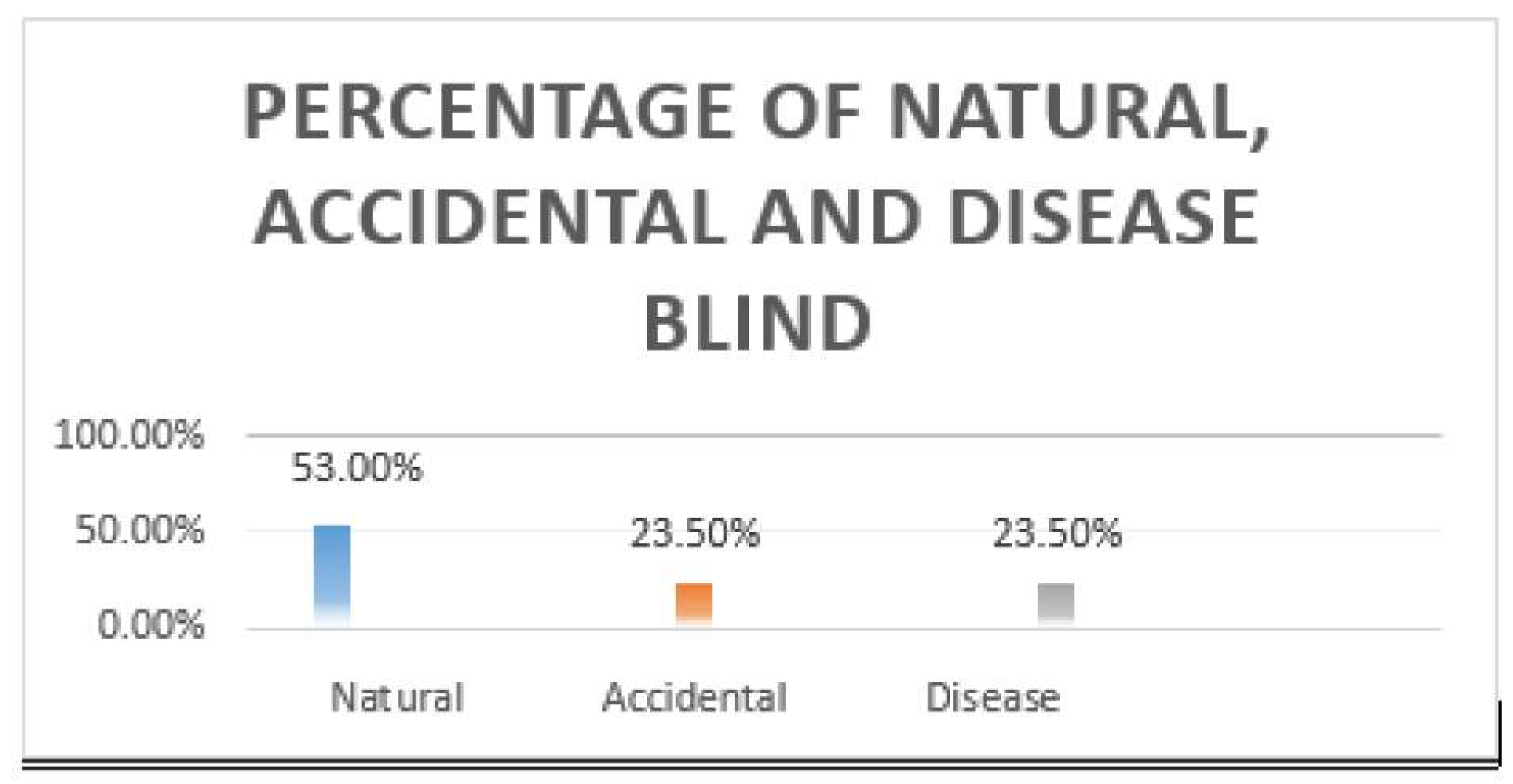
Figure 7.
Percentage of Poor and Rich.
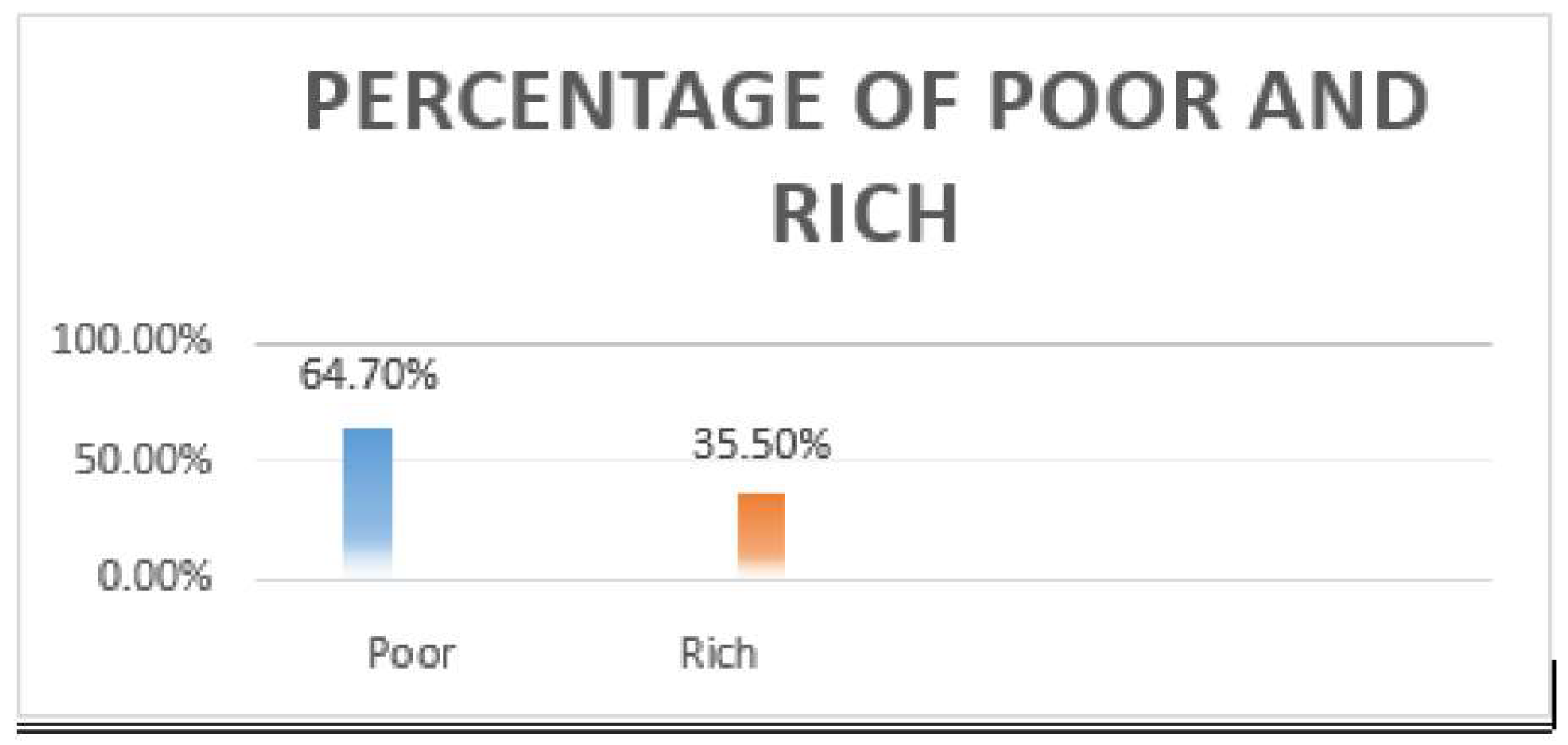
Figure 8.
Percentage of Single and Married.
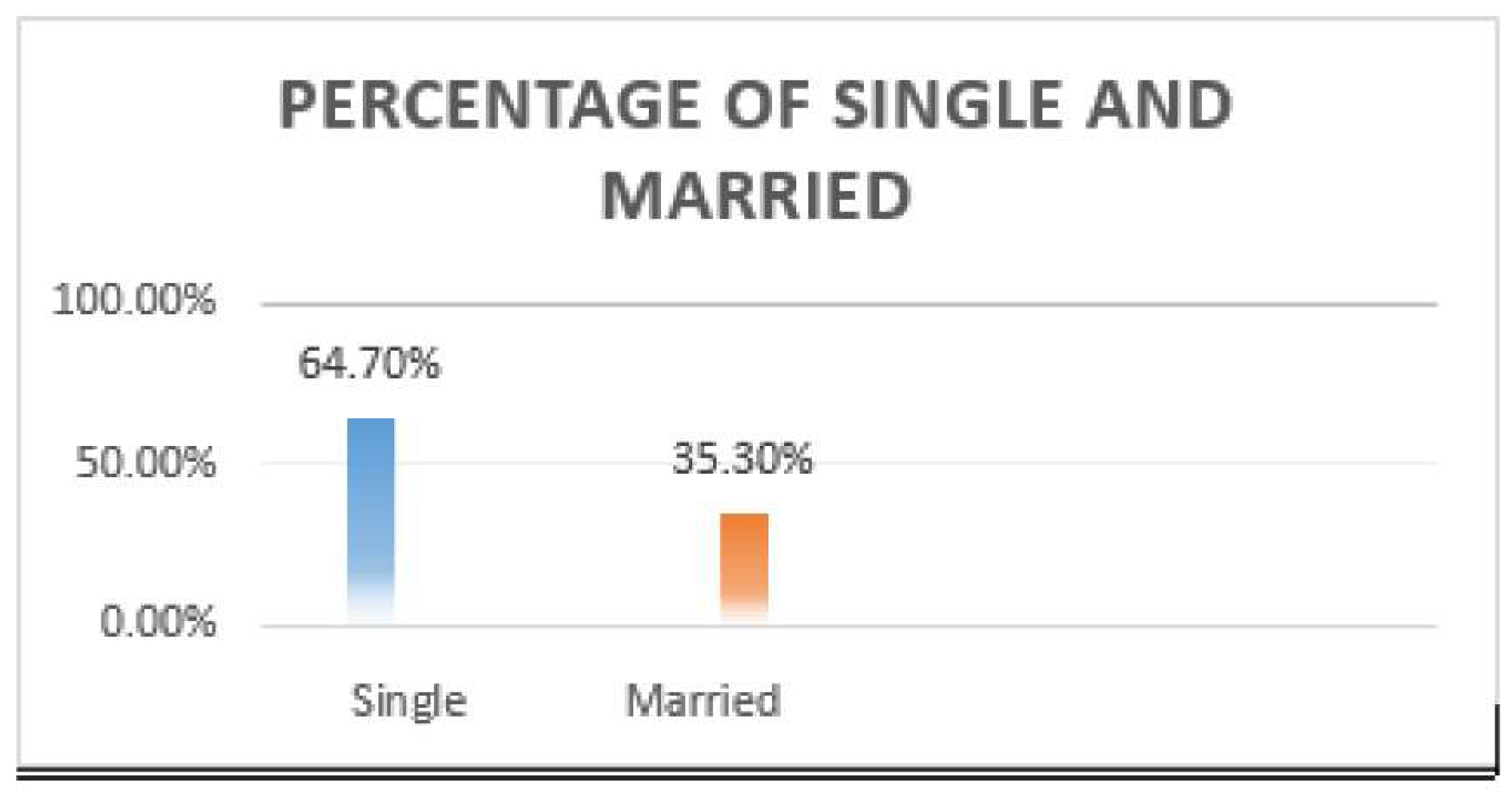
Figure 9.
Percentage of Blind According to Devices used for Movement.
Acknowledgments
Completing this project would not have been possible without the support, guid- ance, and contributions of numerous individuals and organizations. We extend our heartfelt gratitude to all those who played a role in the successful realization of the electronic aid system using an Ultrasonic Sensor (HC-SR04) and Arduino UNO for the benefit of visually impaired individuals. We would like to express our sincere appreciation to our project advisors and mentors, whose expertise, insights, and continuous encouragement were invaluable throughout the entire development process. Their guidance helped shape our ideas and provided us with the necessary direction to overcome challenges. We are deeply thankful to the visually impaired individuals who volunteered their time and insights during the testing and validation phases of the project. Their feed- back and perspective have been instrumental in refining the electronic aid’s design and functionality, ensuring that it aligns with real-world needs and usability. Our gratitude extends to the academic and research institutions that provided ac- cess to resources, facilities, and technical support. These institutions have fostered an environment conducive to innovation, enabling us to explore and implement novel solutions. We would also like to acknowledge the collaborative efforts of our team members who tirelessly contributed their skills, time, and enthusiasm to bring this project to fruition. Each team member’s unique strengths and dedication contributed to the project’s success. Lastly, we appreciate the support and understanding of our families and friends, who stood by us throughout the project’s development, offering encouragement and patience during demanding times. In sum, this project has been a collective endeavor, and we are humbled and grateful for the contributions and assistance of everyone who has been part of this journey. Your unwavering support has made a significant impact on the lives of visually impaired individuals, and we look forward to continuing our efforts to create positive change through technology. Thank you all. Akbar Ali.
Data Availability statement: The associated author can provide the datasets and code that were used to create and test the electronic help for unfamiliar surroundings in this project. Certain data points could be blocked for reasons of privacy and ethics. In order to ensure trans- parency and promote reproducibility, interested researchers will be given instructions on how to access and use the data. conflict of interest The authors of this research article titled ”Electronic Aid for Unfamiliar Environments” declare that there are no conflicts of interest that could be perceived as influencing the interpretation of the results, the presentation of the findings, or any aspect of this work. We affirm that this research has been conducted in an impartial and objective manner, free from any financial, personal, or professional interests that might pose a conflict. We have provided transparent and accurate information about funding sources, af- filiations, and relationships that could potentially raise concerns about bias or vested interests. In the interest of full disclosure, the authors confirm that they have no affil- iations, financial involvement, or relationships that could have influenced the research design, data analysis, or conclusions drawn in this article. Any external support, grants, or collaborations that have contributed to the research are acknowledged in the acknowledgments section of this article. Our commitment to integrity and credibility in scientific research guides our disclosure and management of potential conflicts of interest. We emphasize our dedication to upholding the highest standards of scholarly ethics and ensuring the objectivity and integrity of the findings reported in this research article.
References
- Benjamin, J. M., & Ali, N. A. (1974). An Improved Laser Cane For The Blind. Pro- ceedings of SPIE. [CrossRef]
- Bernabei, D., Ganovelli, F., Di Benedetto, M., Dellepiane, M., & Scopigno, R. (2011). A Low-Cost Time-Critical Obstacle Avoidance System for the Visually Im- paired. http://ipin2011.dsi.uminho.pt/PDFs/Shortpaper/64-Short-Paper.pdf.
- Cardin, S., Thalmann, D., & Vexo, F. (2006). A wearable system for mobility improvement of visually impaired people. The Visual Computer, 23(2), 109–118. [CrossRef]
- Chen, L., Guo, B., & Sun, W. (2010, December 1). Obstacle Detection System for Visually Impaired People Based on Stereo Vision. IEEE Xplore. [CrossRef]
- Dodds, A. G., Armstrong, J. D., & Shingledecker, C. A. (1981). The Nottingham Obstacle Detector: Development and Evaluation. Journal of Visual Impairment & Blindness, 75(5), 203–209. [CrossRef]
- Fang, L., Antsaklis, P. J., Montestruque, L. A., McMickell, M. B., Lemmon, M., Sun, Y., Fang, H., Koutroulis, I., Haenggi, M., Xie, M., & Xie, X. (2005). Design of a Wireless Assisted Pedestrian Dead Reckoning System—The NavMote Experi- ence. IEEE Transactions on Instrumentation and Measurement, 54(6), 2342–2358. [CrossRef]
- Fusiello, A., Panuccio, A., Murino, V., Fontana, F., & Rocchesso, D. (2002). A multi- modal electronic travel aid device. Proceedings. Fourth IEEE International Conference on Multimodal Interfaces. [CrossRef]
- Guerrero-Ib´an˜ez, J., Zeadally, S., & Contreras-Castillo, J. (2018). Sen- sor Technologies for Intelligent Transportation Systems. Sensors, 18(4), 1212. [CrossRef]
- Hesch, J. A., & Roumeliotis, S. I. (2010). Design and Analysis of a Portable Indoor Localization Aid for the Visually Impaired. The International Journal of Robotics Research, 29(11), 1400–1415. [CrossRef]
- Huang, H.-C., Hsieh, C.-T., & Yeh, C.-H. (2015). An Indoor Obstacle Detection System Using Depth Information and Region Growth. Sensors, 15(10), 27116–27141. [CrossRef]
- Hub, A., Diepstraten, J., & Ertl, T. (2004). Design and development of an indoor navigation and object identification system for the blind. Proceedings of the ACM SIGACCESS Conference on Computers and Accessibility - ASSETS ’04. [CrossRef]
- Ito, K., Okamoto, M., Akita, J., Ono, T., Ikuko Gyobu, Takagi, T., Hoshi, T., & Mishima, Y. (2005). CyARM. [CrossRef]
- Liu, Y.-Q., Gao, Z.-K., Shao, Z.-J., & Liu, G.-Y. (2017, June 1). Intelligent ultrasonic detection of walking sticks for the blind. IEEE Xplore. [CrossRef]
- Manuel Saez, J., Escolano, F., & Penalver, A. (2005, September 1). First Steps towards Stereo-based 6DOF SLAM for the Visually Impaired. IEEE Xplore. [CrossRef]
- Manuel, J., & Francisco Escolano Ruiz. (2008). Stereo-based Aerial Obstacle De- tection for the Visually Impaired.
- Oladayo, O. O. (2014). A Multidimensional Walking Aid for Visually Impaired Using Ultrasonic Sensors Network with Voice Guidance. International Journal of Intelligent Systems and Applications, 6(8), 53–59. [CrossRef]
- Rangeetha. S, Rilvana Fathima. B, Sanjana. R, & Nivetha Rajam. S. (2016). Arduino based Smart Walking Stick for Visually Impaired to Iden- tify Bus Route. International Journal of Engineering Research And, V5(04). [CrossRef]
- Rodr´ıguez, A., Yebes, J. J., Alcantarilla, P., Bergasa, L., Almaz´an, J., & Cela, A. (2012a). Assisting the Visually Impaired: Obstacle Detection and Warning System by Acoustic Feedback. Sensors, 12(12), 17476–17496. [CrossRef]
- Rodr´ıguez, A., Yebes, J. J., Alcantarilla, P., Bergasa, L., Almaz´an, J., & Cela, A. (2012b). Assisting the Visually Impaired: Obstacle Detection and Warning System by Acoustic Feedback. Sensors, 12(12), 17476–17496. [CrossRef]
- Sainarayanan, G., Nagarajan, R., & Yaacob, S. (2007). Fuzzy image processing scheme for autonomous navigation of human blind. Applied Soft Computing, 7(1), 257–264. [CrossRef]
- Soni, A., & Aman, A. (2018). Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM Module. IJSTE - International Journal of Science Technology & Engineering —, 4(11), 2349–2784. http://www.ijste.org/articles/IJSTEV4I11007.pdf.
- Stewart, J., Bauman, S., Escobar, M., Hilden, J., Kumud Bihani, & Newman, M. (2008). Accessible contextual information for urban orientation. [CrossRef]
- Tapu, R., Mocanu, B., Bursuc, A., & Zaharia, T. (2013). A Smartphone- Based Obstacle Detection and Classification System for Assisting Visually Im- paired People. 2013 IEEE International Conference on Computer Vision Workshops. [CrossRef]
- Ulrich, I., & Borenstein, J. (2001). The GuideCane-applying mobile robot technologies to assist the visually impaired. IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and Humans, 31(2), 131–136. [CrossRef]
- Ulrich, I., & Nourbakhsh, I. (2000, July 30). Appearance-Based Obstacle Detection with Monocular Color Vision. Semantic Scholar. https://www.semanticscholar.org/paper/Appearance-Based-Obstacle-Detection-with-Monocular-Ulrich-Nourbakhsh/49e196655e5c3953306cd03707c80e65c467bf32.
- Vivek Pradeep, Medioni, G., & Weiland, J. D. (2010). Robot vision for the visually impaired. [CrossRef]
- World Blind Union. (2017, October 16). WBU statement for White Cane Safety. The International Agency for the Prevention of Blindness. https://www.iapb.org/news/wbu-statement-for-white-cane-safety/.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



