
Submitted:
26 April 2024
Posted:
26 April 2024
You are already at the latest version
Abstract
The introduction of Maritime Autonomous Surface Ship (MASS) through the development of autonomous navigation technologies is expected to bring about new technologies, new vessel types, and new job roles such as remote operation center (ROC) and remote operator (RO). The MASS Code are currently being discussed through Maritime Safety Committee (MSC) of International Maritime Organization (IMO). This code is expected to be adopted in the form of non-mandatory guidelines until 2025, with the goal of establishing mandatory requirements by 2028. Additionally, revisions to the International Convention on Standards of Training, Certification and Watchkeeping for Seafarers (STCW) related to crew training and qualifications are planned for adoption by 2027, which will include requirements for MASS operators. This paper aims to examine the fundamental competencies required for safe MASS operation by remote operators using the Analytic Hierarchy Process (AHP) method, considering the emergence of the new profession of RO. Building upon the 66 Knowledge, Understanding & Proficiencies (KUPs) outlined for marine officer in the STCW Convention, the study seeks to identify the additional competencies necessary for RO and contribute to the development of a training model for the future.
Keywords:
Maritime Autonomous Surface Ship (MASS)
; Remote Operator(RO)
; STCW
; Competency
; Analytic Hierarchy Process(AHP)
; International Maritime Organization(IMO)
; KUP
1. Introduction
1.1. Overview
The Fourth Industrial Revolution is accelerating paradigm shifts across all sectors including society, economy, and industry. Maritime Autonomous Surface Ship (MASS) have emerged as a key technology in the maritime industry during this era. This technology is rapidly becoming a new game-changer, bringing significant changes to shipping, maritime operations, ports, logistics, shipbuilding, and equipment industries. Discussions on this topic gained traction through the International Maritime Organization (IMO) Maritime Safety Committee (MSC) meeting held in June 2017, and it has since become a major agenda item in key IMO committees such as the 105th session of the Legal Committee (LEG) and the 99th session of the MSC[1,2]. Particularly at the 99th MSC session, temporary definitions for conducting Regulation Scoping Exercise (RSE) based on four levels of automation were agreed upon to initiate MASS code review work[1]. The criteria for these levels are as shown in Table 1 and Table 2 [1].
The international conventions included in the IMO MASS RSE consisted of 14 conventions under the purview of the MSC, as shown in Table 3[1].
In the two-stage IMO MASS RSE, four key major-gaps were identified. Firstly, there was a need for clear definitions and clarification regarding the terms "master," "crew," and "responsible person." Secondly, the concept of a remote operations center which is currently not addressed in existing IMO conventions, raised significant issues related to functional and structural requirements. Thirdly, issues related to remote operators such as their legal status, employment conditions, and qualification requirements were identified as major concerns stemming from the concept of remote operations. Fourthly, there was a need for definitions for various terms involved in the process.
Based on these identified key major-gaps, IMO identified the need for developing a new code related to MASS at the 103rd MSC[3]. Simultaneously, it was recognized that amendments to existing conventions were also necessary. Therefore, discussions for the development and adoption of the MASS code commenced not only in the MSC but also in the LEG and the Facilitation Committee (FAL) to ensure safe and reasonable MASS operations. Additionally, substantive development work on the Code is ongoing through discussions in working groups such as the Joint Working Group (JWG), the Communications Group (CG), and Splinter Groups. As of now, it is planned to adopt the non-mandatory MASS Code at the 109th MSC session in the second half of this year, with the goal of enforcing the MASS Code on January 1, 2028[3].
1.2. Development of MASS Code
The MASS code currently under development is divided into three main parts, and the key contents are as follows, as outlined in Table 4[4].
Part 1 of the MASS code specifies fundamental aspects such as the purpose, scope of application, definitions, certification, and assessment. It covers safety, security, and eco-friendly operations of MASS. The International Convention for the Safety of Life at Sea (SOLAS) applies to cargo ships equipped with remote or autonomous navigation functions, including Remote Operation Center (ROC). It also includes requirements and procedures for the approval and certification of MASS including ROCs[4].
In Part 2, it focuses on the key principles of MASS, primarily addressing factors directly involved in their operation environment and human elements. It outlines essential elements for safe operation, including operational principles, risk identification, system design, software and programs, connectivity, and personnel qualifications and roles, both on board and remotely. Table 5 provides an overview of the entire structure and development status of Part 2 of the MASS code[4].
In Part 3, it details the technical and functional requirements for the safe operation of autonomous ships. It specifies essential requirements for 16 key technologies crucial for safe navigation, remote operation, communication, emergency response, security, maintenance, and more. Countries have been assigned specific areas to participant in the development of the 16 key functional requirements in Part 3[4].
In particular, Section 2.8 "Human Element" of the code pertains to matters related to the introduction of MASS onboard Crew and ROs due to MASS adoption[5]. This includes the development of operational requirements not only within the MASS Code but also in the comprehensive revision of the STCW Convention (targeted for adoption in 2027) concerning operator requirements. Key of consideration include the following four questions:
- Should ROs be considered as crew?
- Should ROs possess maritime experience, competence, and qualifications?
- Applicability of STCW Convention to MASS onboard crew and ROs?
The discussions are actively taking place in working group meetings regarding the matters mentioned, especially concerning the qualifications of RO. Various countries are advocating that ROs should possess the qualifications and competencies required for marine officer as specified in the STCW Convention.
In this paper, it aims to explore previous studies regarding the qualifications required for ROs and to critically examine the requirements for marine officer outlined in the STCW Convention, aligning with the current direction of discussions. Through this analysis, it is intended to use the Analytic Hierarchy Process (AHP) to determine which competencies are prioritized for ROs and present our findings accordingly.
2. Literature Review
Various issues related to autonomous ships are being discussed in various sectors, including the IMO, industry, and academia. Here is an introduction to literature paper and survey on human factors in this context.
V. Sencila et al. acknowledge that while MASS operates remotely, human factors still play a crucial role, and they argue that in order to ensure the safe operation of MASS, thorough consideration of human factors is necessary at all automation stages. It presents that new knowledge, such as digital technologies, Human-Machine Interface (HMI), and understanding the role of decision support systems, will be required for MASS operation[6].
W. Deling et al. argue that there is a need to closely track the development of MASS in order to produce personnel suitable for new navigation technologies, along with outlining eight key technologies related to MASS operation. It emphasizes the importance of improving education and training methods to provide new knowledge through such tracking. Additionally, they suggest the necessity of incorporating content related to new knowledge and technologies resulting from the emergence of MASS into existing Maritime Education and Training (MET) programs[7].
SC Mallam et al. present that obstacles to MASS operation are not just technical but also involve new regulatory, responsibility, and security-related human factors alongside emerging paradigms of ship operation. It emphasizes the need to consider aspects of system reliability, understanding of decision-making, and predictability, as well as the technologies required for developing, operating, and maintaining such systems. Therefore, It presents that research and development concerning reliability, control, considerations for practical application, organizational aspects of education, training, and operations, as well as perception and understanding, are crucial elements regarding MASS and human factors[8].
Vojkovic, G. et al. anticipate that the emergence of AI-driven MASS will bring significant changes to the traditional legal authorities and status of captains, leading to legal challenges. It categorizes the captain's authority into three major areas: public duties, responsibilities for ship safety, and acting as the owner's agent. It takes into account that if the captain is not on board the vessel, there will be significant changes in legal responsibilities regarding authority. When the captain is onshore rather than on the ship, there will be numerous issues that need to be addressed partially by the industry or at the national level. Therefore, it presents that there is a need for collaboration among experts from various fields to contribute to the development of new "legal transportation rules"[9].
Fan et al. present that for the safe operation of MASS, there is a need to provide an active and systematic framework that enables the safety assessment and quantification of new solutions. It also highlights that even in MASS's third phase, significant risks due to human factors still exist. With remote operators monitoring multiple vessels simultaneously, new types of human-related risks can emerge. Human factors will have a substantial impact on safe operations in the context of MASS, and they advocate for a thorough consideration of a system for safe MASS operations based on the identified 23 human-related factors[10].
Ramos et al. highlight ship collision incidents as critical accident factors in MASS operations. It proposes constructing Event Sequence Diagrams (ESD) and conducting Concurrent Task Analysis (CoTA) to develop MASS collision scenarios and present the Human-System Interaction in Autonomy (H-SIA) method for understanding human-system interaction in MASS collision scenarios[11].
Zhang M. et al. emphasize that until the complete autonomy phase 4 of MASS, human factors are involved, and human errors remain a navigational risk factor. It suggests that research is needed to reduce the probability of human errors. To achieve this, it need to evaluate human errors probabilistically using the Technique for Human Error Rate Prediction (THERP) and Bayesian Networks (BN) models in the collaboration between humans and autonomy[12].
Montewak et al. analyze that while direct intervention by navigators in ship navigation is likely to decrease, the involvement of remote operators operating MASS from Shore Control Centers (SCC) is inevitable, necessitating consideration of psychological factors (mental state). Furthermore, it proposes that MASS design should consider human factors, tasks performed by operators, and tools required for safe operations. It also suggests that risk assessment of autonomous vessel operation and collision avoidance models should consider Human-system interaction and human failure[13].
KIM T.E. and Sharma A. conducted an investigation into the suitability of traditional ship operation skills according to the STCW Table A-II/1 (competencies required for marine officer) in MASS operations. It is conducted a survey to analyze the importance of these competencies and proposed key factors through factor analysis[14].
Previous studies have used various analytical techniques to identify and present the necessary competencies for MASS. However, it aims to use the AHP technique to identify which of the 66 Knowledge, Understanding and Proficiencies (KUPs), the essential competencies required for marine officer under the STCW Convention are more critical for ROs in operation with MASS.
3. Methodology
3.1. Analytic Hierarchy Process(AHP) Method
Analytic Hierarchy Process (AHP) is a multi-criteria decision-making method developed by Thomas L. Saaty in the United States. AHP is primarily used in decision-making processes that require complex and important judgments across various fields, and it has proven to be useful in decision-making related to corporate strategies or government policies as well. AHP decomposes decision problems into a hierarchical structure to derive priorities among relevant alternatives. Its application method is straightforward, allowing for easy expression of decision-making processes. Moreover, AHP can synthesize representative results from diverse judgments, thereby offering significant advantages by surveying experts related to the decision topic[15].
Setting up hierarchies for decision-making generally relies on literature reviews or expert opinions. The hierarchy structure typically includes Goal, Criteria, Sub-Criteria, and Alternatives. The Goal represents the objective of the decision-making process. Since the Goal guides respondents' judgments regarding the criteria and alternatives, it needs to be carefully and specifically defined by the surveyor. Criteria represent factors or attributes contributing to the Goal. The structure of Criteria forms the hierarchy, and pairwise comparisons among Criteria largely determine the significance of applying AHP in the decision-making process. Alternatives refer to the options or solutions targeted for decision-making through AHP[16].
Criteria forming the hierarchy undergo pairwise comparisons through surveys of experts, typically utilizing a 1-9 scale refer to table 1[x]. In pairwise comparisons, numbers from 1 to 9 reflect relative importance or preference between two factors (A and B), where 1 indicates equal importance, 3 slight preference, 5 moderate preference, 7 strong preference, and 9 extreme preferences. Closer to 9 signifies greater importance of the factor[16].

Table 6.
Saaty’s 1-9 Point Scale.
| Scale | Definition | Description |
|---|---|---|
| 1 3 5 7 9 |
Equally important A bit important Quite important Great important Absolutely important |
If two elements are judged to be equally important. If one element is slightly more important than the other. If one element is significantly different from the other. If one element is definitely important than the other. If one element is deemed absolutely more important than the other. |
The interpretation of the above scale is known as pairwise comparison, which means comparing two entities at a time to select relatively preferred or important ones. AHP enhances the accuracy of human judgments by repeatedly conducting such pairwise comparisons. The results of multiple pairwise comparisons can be summarized into a pairwise comparison matrix. The pairwise comparison matrix is a square matrix with the same number of rows and columns, as shown in Equation 1[16].
Once the comparisons of criteria are completed on the questionnaire, AHP calculates the priority or weights of each element through mathematical processes. The applied equation for deriving the relative weights of decision factors is given as Equation (2), where represents the relative importance of the 𝑖th evaluation factor, and when evaluating factor 𝑖 is pairwise compared with another evaluation factor 𝑗, the importance is denoted by . The relative importance is derived from the pairwise comparison matrix using the Eigenvalue method, as shown in Equation (3)[16].
The pairwise comparison method assesses the consistency of comparison matrices to judge the reliability of the results. To do this, it calculates the Eigenvector and Eigenvalue of the comparison matrix, and computes the Consistency Index (CI) and Consistency Ratio (CR). The Consistency Ratio is calculated by dividing the Consistency Index by the consistency of a random matrix and is used to obtain more consistent comparison results. Particularly in real survey responses, there may be inconsistencies, so measuring the degree of consistency is necessary. CI and CR can be defined using Equations (4) and (5)[16]. RI stands for Random Index, which represents the consistency index when a pairwise comparison matrix is randomly generated using a random scale. The consistency index is calculated based on the size of the matrix.
If the CR is 0, it means that the respondent conducted pairwise comparisons consistently. Generally, when the CR is within a maximum of 0.1 or 0.2, the pairwise comparison matrix is considered consistent. A CR within 0.2 is deemed an acceptable level of consistency, while a CR above 0.2 indicates insufficient consistency and suggests the need for reassessment[16].
3.2. Evaluation Criteria
The main objective of this study is to determine the relative importance of the competencies required for a RO who will operate MASS, as specified in Appendix A, corresponding to the minimum competency standards for marine officers in charge of a navigational watch on ships of 500 gross tonnage or more, as stipulated in STCW Code A-II/1. However, since there are a total of 66 competencies listed, it would be too cumbersome to measure the relative importance of each individual competency, potentially leading to inaccuracies in the assessment of competencies. Therefore, it needs to first proceed with grouping the competencies. Delphi technique was employed to group the competencies based on expert opinions from a panel of experts. The Delphi method is a commonly utilized approach for predicting future outcomes or addressing complex issues by leveraging the collective knowledge of experts. It employs iterative surveys with a specific focus to achieve consensus among a group of experts on a particular subject while minimizing response discrepancies. Anonymity is a crucial aspect of this method, enabling experts to provide unbiased opinions, which leads to more objective and reliable consensus. The results obtained are considered highly credible due to the consensus reached through multiple rounds of iteration and expert evaluation[17-21]. The detailed composition and demographic characteristics of expert panels are provided in Table 7.
The expert group consist of 13 panels who are affiliated with academia, research institutes, and government and have been engaged in ship operation and training fields for at least 5 years. They are directly or indirectly involved in MASS technology development R&D project of South Korea, possessing sufficient knowledge about MASS. The Delphi survey was conducted three times. The first survey was an open-ended questionnaire based on the 66 KUPs that marine officer must have, focusing on essential elements that ROs must possess. Based on this, 11 factors were identified, and the suitability was assessed through closed surveys in the second and third rounds to derive results.
4. Result
In accordance with the purpose of this study to identify priority factors ROs based on the 11 factors identified for analysis, a survey was conducted targeting participants who completed MASS remote operation training at the Korea Institute of Maritime and Fisheries Technology. The targeted training was conducted from January 2022 to December 2023, totaling 8 times of training. The status of the participants is detailed in Table 8.
Reflecting the characteristics of the AHP methodology, a separate guidance page was created and a survey was conducted after completing remote operation training session using simulators. Responses were collected from a total of 42 students, with 23 surveys meeting the CI and CR criteria ensuring consistency.
Based on pairwise comparison results for each criterion, the pairwise comparison matrix and calculated the eigenvector were obtained to derive relative weights. Furthermore, to harmonize the priorities among respondents, it is used the geometric mean to derive relative priorities. The geometric mean involves multiplying the pairwise comparison results of multiple evaluators and then taking the square root of that product, used when determining priorities in group decision-making as per equation (6). The priorities derived from participants who were experienced in remote navigation, using this method, are shown in Table 9.
Before the training, participants identified "Use of Navigational Instruments" as the most important competency for ROs of MASS. When asked for the reason, they mentioned that "having a thorough understanding of navigational instruments proper usage would aid in safe navigation." However, after the actual remote operation simulator training, "Maintaining Seaworthiness" was designated as the highest competency. When questioned about the reasons for these differences, participants added the response that "accurately diagnosing the ship's condition from a different area, not within the ship, is crucial for navigating in a remote."
Furthermore, the geometric mean of the survey was divided into two groups based on whether the respondents held a C.O.C. This division was done to compare the priorities of individuals with actual ship operation experience against those without. It is worth noting that while participants in this survey may not have direct ship navigation experience, many are employed in shipbuilding company, maritime research institutes, or related industries, so they are not completely unfamiliar with ships. The results for participants holding a C.O.C are presented in Table 10, not holding a C.O.C are presented in Table 11.
According to the Table 12, the group of C.O.C holders ranked "Maintaining Seaworthiness" as the top competency, followed by "Damage Control" as the second, and "Use of Navigational Instruments" as the third, consistent with the integrated results previously discussed. This indicates that the C.O.C holders considered the ability to maintain seaworthiness as more crucial compared to others.
On the other hand, the group of C.O.C non-holders ranked "Use of Navigational Instruments" as the most important competency, followed by "Maintaining Seaworthiness" as the second, and "Application of Meteorological Information" as the third in terms of priority. This suggests that the priorities shifted based on actual ship navigation experience, with C.O.C holders prioritizing safety over operational abilities, while the group of C.O.C non-holders focused more on environmental and equipment operational concerns. This reflects the inherent differences in competencies between those with traditional maritime experience and those without C.O.C.
According to current rough discussions on RO competency, ROs are expected to meet the navigational competency requirements outlined by STCW convention and code. The notable difference in results based on C.O.C status confirms that ROs, being responsible for ship navigation among other marine officer duties, naturally require navigational competencies.
5. Conclusion
The MASS Code currently under discussion by the IMO aims for mandatory implementation by 2028 and is actively being discussed with the final stages of technical discussions approaching[3]. Alongside these technical discussions, there is also active discourse on human elements of ROs for MASS.
In this study, the Delphi method was utilized to identify the competencies required for ROs of MASS among students participating in remote operation training conducted by KIMFT. The AHP was then employed to confirm priorities and analyze importance. Subsequently, the geometric mean of values obtained through surveys was used to analyze importance and priority.
The prioritization of competencies that ROs should possess is as follows: "Maintaining Seaworthiness" ranked highest at 0.1542, followed by "Use of Navigational Instruments" at 0.1486, and "Application of Meteorological Information" at 0.1184. When the respondents were divided into two groups based on C.O.C holder, the results were as follows.
For the C.O.C holder group, "Maintaining Seaworthiness" was prioritized the highest at 0.1585, followed by "Damage Control" at 0.1389, and "Use of Navigational Instruments" at 0.1165. For the C.O.C non-holder group, "Use of Navigational Instruments" was ranked first at 0.1601, followed by "Maintaining Seaworthiness" at 0.1495, and "Application of Meteorological Information" at 0.1345.
Through these perceptual differences, significant results are derived indicating that the presence or absence of navigational experience can change the important competencies for ROs. Considering that the primary purpose of duty of RO is safe navigation, it is more important to assess overall seaworthiness rather than operational abilities for a single navigational instruments or environmental awareness. Therefore, it can be inferred that training on sufficient navigational competencies should be a fundamental component when considering future training models for ROs. Consequently, the results of this study can serve as foundational data for allocating and structuring training duration for RO training models.
However, considering the ongoing development of systems and components for MASS and the fact that the training environment at KIMFT, where the study was conducted, was established in 2020. So, it cannot fully represent the current environment of remote operation that is under consideration. Therefore, there are limitations to the clarity of the above results regarding the detailed competencies of ROs. Moving forward, continuous research will be necessary through actual simulation-based training and experiments to explore in-depth the specific competencies that ROs should possess.
Acknowledgments
This research was supported by Korea Institute of Marine Science & Technology Promotion (KIMST) funded by the Ministry of Oceans and Fisheries, Korea (20200615, Development of Autonomous Ship Technology).
Appendix A. KUPs for marine officer in A-II/1 of STCW Code
| No. | KUPs |
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 |
Ability to use celestial bodies to determine the ship’ position Ability to determine the ship’s position by use of 1) landmarks, 2) aids to navigation, including lighthouses, beacons and buoys, 3) dead reckoning, taking into account winds, tides, currents and estimated speed Have thorough knowledge of and ability to use nautical charts, and publications, such as sailing directions, tide tables, notices to mariners, radio navigational warnings and ships’ routing information Ability to determine the ship’s position by use of electronic navigational aids Ability to operate the equipment and apply the information correctly Have knowledge of the principles of magnetic and gyro-compasses Ability to determine errors of the magnetic and gyro-compasses, using celestial and terrestrial means, and to allow for such errors Have knowledge of steering control systems, operational procedures and change-over from manual to automatic control and vice versa. Adjustment of controls for optimum performance Ability to use and interpret information obtained from shipborne meteorological instruments Have knowledge of the characteristics of the various weather systems, reporting procedures and recording systems Ability to apply the meteorological information available Have thorough knowledge of the content, application and intent of the International Regulations for Preventing Collisions at Sea, 1972, as amended Have thorough knowledge of the Principles to be observed in keeping a navigational watch Proficient in use of routing in accordance with the General Provisions on ships’ routing Proficient in use of information from navigational equipment for maintaining a safe navigational watch Have knowledge of blind pilotage techniques Proficient in use of reporting in accordance with the General Principles for Ship Reporting Systems and with VTS procedures Knowledge of bridge resource management principles, including 1) allocation, assignment, and prioritization of resources, 2) effective communication 3) assertiveness and leadership, 4) obtaining and maintaining situational awareness, 5) consideration of team experience Have knowledge of the fundamentals of radar and automatic radar plotting aids (ARPA) Ability to operate and to interpret and analyse information obtained from radar and ARPA performance, including 1) factors affecting performance and accuracy, 2) setting up and maintaining displays, 3) detection of misrepresentation of information, false echoes, sea return, etc., racons and SARTs Ability to operate and to interpret and analyse information obtained from radar and ARPA use, including 1) range and bearing; course and speed of other ships; time and distance of closest approach of crossing, meeting overtaking ships, 2) identification of critical echoes; detecting course and speed changes of other ships; effect of changes in own ship’s course or speed or both, 3) application of the International Regulations for Preventing Collisions at Sea, 1972, as amended, 4) plotting techniques and relative- and true- motion concepts, 5) parallel indexing Awareness of principal types of ARPA, their display characteristics, performance standards and the dangers of over- reliance on ARPA Ability to operate and to interpret and analyse information obtained from ARPA, including 1) system performance and accuracy, tracking capabilities and limitations, and processing delays, 2) use of operational warnings and system tests, 3) methods of target acquisition and their limitations, 4) true and relative vectors, graphic representation of target information and danger areas, 5) deriving and analysing information, critical echoes, exclusion areas and trial manoeuvres Have knowledge of the capability and limitations of ECDIS operations, including 1) a thorough understanding of Electronic Navigational Chart (ENC) data, data accuracy, presentation rules, display options and other chart data formats, 2) the dangers of over-reliance, 3) familiarity with the functions of ECDIS required by performance standards in force Proficient in operation, interpretation, and analysis of information obtained from ECDIS, including 1) use of functions that are integrated with other navigation systems in various installations, including proper functioning and adjustment to desired settings, 2) safe monitoring and adjustment of information, including own position, sea area display, mode and orientation, chart data displayed, route monitoring, user-created information layers, contacts (when interfaced with AIS and/or radar tracking) and radar overlay functions (when interfaced), 3) confirmation of vessel position by alternative means, 4) efficient use of settings to ensure conformance to operational procedures, including alarm parameters for anti- grounding, proximity to contacts and special areas, completeness of chart data and chart update status, and backup arrangements, 5) adjustment of settings and values to suit the present conditions, 6) situational awareness while using ECDIS including safe water and proximity of hazards, set and drift, chart data and scale selection, suitability of route, contact detection and management, and integrity of sensors. Ability to take precautions for the protection and safety of passengers in emergency situations Ability to take initial actions following a collision or a grounding; and ability to assess initial damage and perform control Appreciate the procedures to be followed for rescuing persons from the sea, assisting a ship in distress, responding to emergencies which arise in port Have knowledge of the contents of the International Aeronautical and Maritime Search and Rescue (IAMSAR) Manual Have adequate knowledge of the English language to enable the officer to use charts and other nautical publications, to understand meteorological information and messages concerning ship’s safety and operation, to communicate with other ships, coast stations and VTS centres and to perform the officer’s duties also with a multilingual crew, including the ability to use and understand the IMO Standard Marine Communication Phrases (IMO SMCP) Ability to use the International Code of Signals Ability to transmit and receive, by Morse light, distress signal SOS as specified in Annex IV of the International Regulations for Preventing Collisions at Sea, 1972, as amended, and appendix 1 of the International Code of Signals, and visual signalling of single-letter signals as also specified in the International Code of Signals Have knowledge of ship manoeuvring and handling, including knowledge of 1) the effects of deadweight, draught, trim, speed and under-keel clearance on turning circles and stopping distances, 2) the effects of wind and current on ship handling, 3) manoeuvres and procedures for the rescue of person overboard, 4) squat, shallow-water and similar effects, 5) proper procedures for anchoring and mooring Have knowledge of the effect of cargo, including heavy lifts, on the seaworthiness and stability of the ship Have knowledge of safe handling, stowage and securing of cargoes, including dangerous, hazardous and harmful cargoes, and their effect on the safety of life and of the ship Ability to establish and maintain effective communications during loading and unloading Have knowledge and ability to explain where to look for damage and defects most commonly encountered due to 1) loading and unloading operations, 2) corrosion, 3) severe weather conditions Ability to state which parts of the ship shall be inspected each time in order to cover all parts within a given period of time Ability to identify those elements of the ship structure which are critical to the safety of the ship Ability to state the causes of corrosion in cargo spaces and ballast tanks and how corrosion can be identified and prevented Have knowledge of procedures on how the inspections shall be carried out Ability to explain how to ensure reliable detection of defects and damages Have understanding of the purpose of the ‘enhanced survey programme’ Have knowledge of the precautions to be taken to prevent pollution of the marine environment Awareness of anti-pollution procedures and all associated equipment Awareness of importance of proactive measures to protect the marine environment Have working knowledge and application of stability, trim and stress tables, diagrams and stress-calculating equipment Have understanding of fundamental actions to be taken in the event of partial loss of intact buoyancy Have understanding of the fundamentals of watertight integrity Have general knowledge of the principal structural members of a ship and the proper names for the various parts Ability to organize fire drills Have knowledge of classes and chemistry of fire Have knowledge of fire-fighting systems Have knowledge of action to be taken in the event of fire, including fires involving oil systems Operate life-saving appliances Ability to organize abandon ship drills and knowledge of the operation of survival craft and rescue boats, their launching appliances and arrangements, and their equipment, including radio life-saving appliances, satellite EPIRBs, SARTs, immersion suits and thermal protective aids Awareness of the practical application of medical guides and advice by radio, including the ability to take effective action based on such knowledge in the case of accidents or illnesses that are likely to occur on board ship Have basic working knowledge of the relevant IMO conventions concerning safety of life at sea, security and protection of the marine environment Have working knowledge of shipboard personnel management and training Have knowledge of related international maritime conventions and recommendations, and national legislation Ability to apply task and workload management, including 1) planning and co-ordination, 2) personnel assignment, 3) time and resource constraints, 4) prioritization Have knowledge and ability to apply effective resource management, including 1) allocation, assignment, and prioritization of resources, 2) effective communication onboard and ashore, 3) decisions reflect consideration of team experiences, 4) assertiveness and leadership, including motivation, 5) obtaining and maintaining situational awareness Have knowledge and ability to apply decision-making techniques, including 1) situation and risk assessment, 2) identify and consider generated options, 3) selecting course of action, 4) evaluation of outcome effectiveness Have knowledge of personal survival techniques Have knowledge of fire prevention and ability to fight and extinguish fires Have knowledge of elementary first aid Have knowledge of personal safety and social responsibilities |
Appendix B. First-Stage Questionnaire for Delphi
|
First Stage Questionnaire Please List seven essential skills of marine officer that a RO(Remote Operator) should possess. (Choose from among 66 KUPs listed in STCW Convention) 1. 2. 3. 4. 5. 6. 7. |
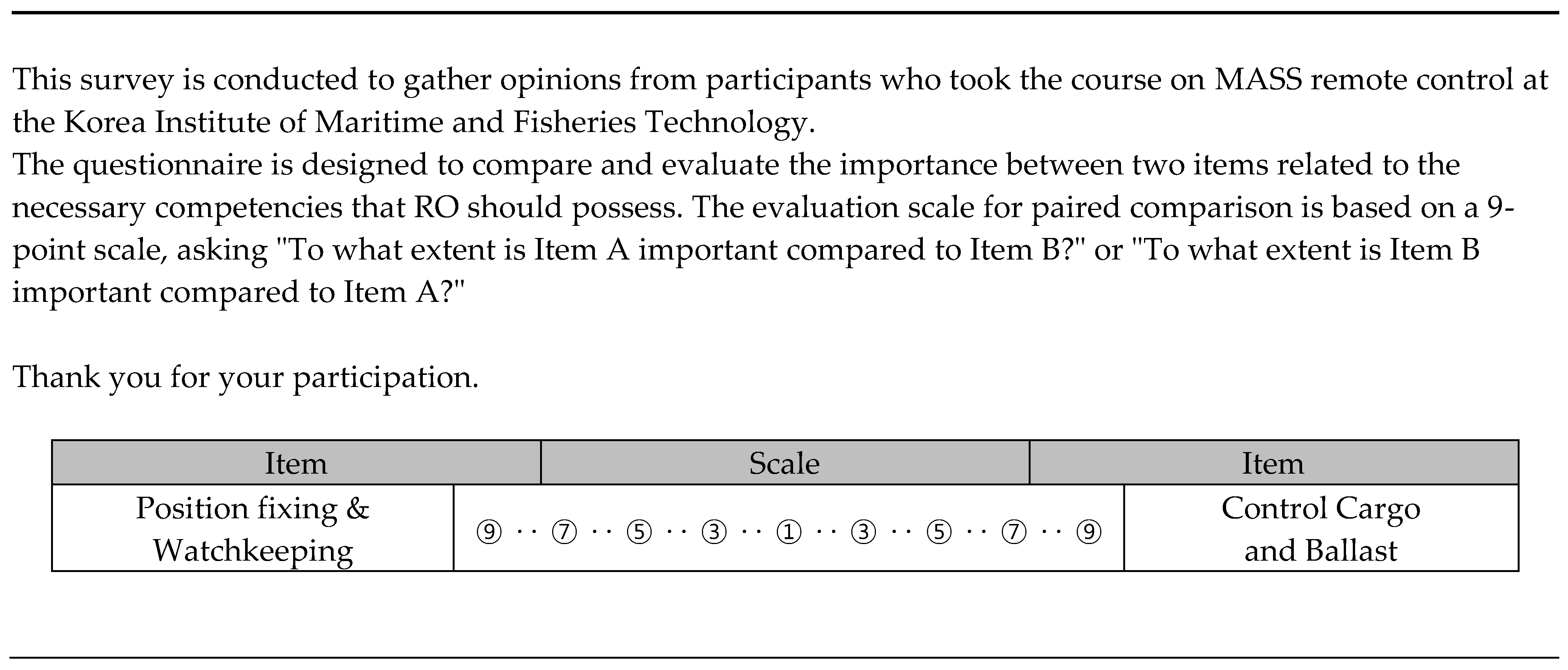
Appendix C. Sample Page of AHP Questionnaire
References
- International Maritime Organization (2017), Maritime Autonomous Surface Ships Proposal for a regulatory scoping exercise, MSC 98/20/2 C.F.R.
- International Maritime Organization (2017), REPORT OF THE MARITIME SAFETY COMMITTEE ON ITS NINETY-EIGHTH SESSION, MSC 98/23 C.F.R.
- International Maritime Organization (2021), REGULATORY SCOPING EXERCISE FOR THE USE OF MARITIME AUTONOMOUS SURFACE SHIPS (MASS): Report of the Working Group, MSC 103/WP.8 C.F.R.
- International Maritime Organization (2023), DEVELOPMENT OF A GOAL-BASED INSTRUMENT FOR MARITIME AUTONOMOUS SURFACE SHIPS (MASS), Report of the Working Group, MSC 107/WP.9 C.F.R.
- International Maritime Organization (2024), HUMAN ELEMENT AND COMPETENCIES FOR MASS CREW, Report of the Joint Working Group, MSC-JWG 3/3.
- Sencila Senčila, V.; Kalvaitienė, G. Industry 4.0: Autonomous Shipping and New Challenges for Maritime Education and Training.
- Deling, W.; Dongkui, W.; Changhai, H.; Changyue, W. Marine Autonomous Surface Ship—A Great Challenge to Maritime Education and Training. Am. J. Water Sci. Eng 2020, 6. [Google Scholar] [CrossRef]
- Mallam, S. C.; Nazir, S.; Sharma, A. The human element in future Maritime Operations–perceived impact of autonomous shipping. Ergonomics 2020, 63, 334–345. [Google Scholar] [CrossRef] [PubMed]
- Vojković, G.; Milenković, M. Autonomous ships and legal authorities of the ship master. Case studies on transport policy 2020, 8, 333–340. [Google Scholar] [CrossRef]
- Fan, C.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.; Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean Engineering 2020, 202, 107188. [Google Scholar] [CrossRef]
- Ramos, M. A.; Thieme, C. A.; Utne, I. B.; Mosleh, A. Human-system concurrent task analysis for maritime autonomous surface ship operation and safety. Reliability Engineering & System Safety 2020, 195, 106697. [Google Scholar]
- Zhang, M.; Zhang, D.; Yao, H.; Zhang, K. A probabilistic model of human error assessment for autonomous cargo ships focusing on human–autonomy collaboration. Safety science 2020, 130, 104838. [Google Scholar] [CrossRef]
- Montewka, J.; Wróbel, K.; Heikkilä, E.; Valdez Banda, O.; Goerlandt, F.; Haugen, S. (2018). Challenges, solution proposals and research directions in safety and risk assessment of autonomous shipping. Paper presented at the PSAM 14th Probabilistic Saf Assess Manag Conf.
- KIM T. E and Sharma A. (2021), Exploring technical and non-technical competencies of navigators for autonomous shipping, Maritime policy and management. [CrossRef]
- Choi, H.S.; Hong, S.A.; Huh, S.Y. Future Directions for the Development of the Nuclear Power Sector in South Korea : An Analytic Hierarchy Process (AHP) Approach. Journal of Energy Engineering 2024, 33, 90–107. [Google Scholar] [CrossRef]
- Saaty TL (1980), The analytic hierarchy process: RWS Publications.
- Buehler, R.; Messervey, D.; Griffin, D. Collaborative planning and prediction: Does group discussion affect optimistic biases in time estimation? Organizational Behavior and Human Decision Processes 2005, 97, 47–63. [Google Scholar] [CrossRef]
- Rowe, G. A guide to Delphi. Foresight: The International Journal of Applied Forecasting 2007, 11–16. [Google Scholar]
- Hur Y., R.; Lee K., H. Identification and evaluation of the core elements of character education for medical students in Korea. Journal of Educational Evaluation for Health Professions 2009, 16, 2–5. [Google Scholar] [CrossRef]
- Park, H.R.; Kim, J.M. Analysis of the Prediction of Operation Processes based on Mode of Operation for Ships: Applying Delphi method. Journal of Korea Society of Computer and Information 2023, 28, 267–275. [Google Scholar] [CrossRef]
- Linstone, H. A.; Turoff, M. (1975). The Delphi Method: Techniques and Applications. MA: AddisonWesley.
| 1 | C.O.C : Certificate of Competency, It is a certification required for personnel in maritime industries. It is used to demonstrate the skills, knowledge, and experience necessary for the respective role in ship according to the STCW requirement. |
| 2 | Seaworthiness : It refers to the condition in which a ship is safe and fit for operation under navigation conditions. It encompasses the physical, technical, and operational conditions that allow a ship to navigate safely at sea. This term indicates that a ship is capable of functioning and operating safely under permissible conditions, considering various aspects related to the design, maintenance, and operation. |
Table 1.
Definition of MASS.
| Definition of MASS |
| Maritime Autonomous Surface Ship (MASS) is defined as a ship which, to a varying degree, can operate independent of human interaction |
Table 2.
Level of Autonomy.
| Level | Definition |
|---|---|
| Degree 1 Degree 2 Degree 3 Degree 4 |
Ship with automated process and decision support Remotely controlled ship with seafarers on board Remotely controlled ship without seafarers Fully autonomous ship |
Table 3.
International Conventions for which IMO MASS RSE has been conducted.
| International Conventions for which IMO MASS RSE has been conducted | |
|---|---|
| (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) |
COLREG 1972 – International Regulations for Preventing Collision at Sea CSC 1972 – International Convention for Safe Containers LL 1966 – International Convention on Load Line LL PROT 1988 – Protocol of 1988 relating to the LL SAR 1979 – International Convention on Maritime Search and Rescue SOLAS 1974 – International Convention for the Safety of Life at Sea SOLAS AGR 1996 – Agreement concerning specific stability requirement for ro-ro SOLAS PROT 1978 – Protocol of 1978 relating to the SOLAS SOLAS PROT 1988 – Protocol of 1988 relating to the SOLAS SPACE STP 1973 – Protocol on Space Requirements for STP STCW 1978 – International Convention on Standards of Training, Certification and Watch-keeping for Seafarers STCW-F 1995 – STCW for Fishing Vessel Personnel STP 1971 – Special Trade Passenger Ships Agreement TONNAGE 1969 – International Convention on Tonnage Measurement of Ships |
Table 4.
Main Contents of MASS Code.
| Part | Main Contents |
|---|---|
| Part 1 | 1) Overview of the purpose and definition of the code, etc. 2) Basic matters such as scope and principles of application |
| Part 2 | 1) Designing the Principles of Autonomous Ships and Key Functions 2) Function and Role of Operational Environment and Human Factors |
| Part 3 | 1) Objectives and functional requirements of 16 major technologies (navigation, communication, emergency response, etc.) |
Table 5.
Part 2 in MASS Code.
| Part 2 – Main Principles for MASS and MASS Function | |
|---|---|
| 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 |
Operational Context Safe States of a MASS Function required of a MASS Risk assessment System design Software Connectivity Human Elements |
Table 7.
Composition of the group of expert panels.
| Job | Number of Panel | Experience | Number of Panel | Age | Number of Panel |
|---|---|---|---|---|---|
| Researcher Professor Government |
7 4 2 |
5 ~ 10 years 10 ~ 15 years 15 ~ 20 years |
4 6 3 |
Under 40 41 ~ 50 50 ~ |
5 5 3 |
Table 8.
Specification of Participants joined MASS course.
| Job | Number of Participants | Experience | Number of Participants | C.O.C1 | Number of Participants |
|---|---|---|---|---|---|
| Academic Researcher Professor Government |
3 4 15 1 |
Under 1 year 1 ~ 5 years 6 ~ 10 years 11 ~ 15 years 16 ~ 20 years |
5 2 4 10 2 |
Yes No |
6 17 |
Table 9.
Result of AHP Geometric mean.
| Competencies | Weights | Rank |
|---|---|---|
| Position Fixing and Watchkeeping Control Cargo and Ballast Emergency Response (Fire, Flood, etc.) Safety Awareness Use of Navigational Instruments Teamwork and Leadership Pollution Prevention Damage Control Application Meteorological Information Communication Maintaining Seaworthiness2 |
0.1029 0.0576 0.0592 0.0578 0.1486 0.0519 0.0500 0.0922 0.1184 0.1071 0.1542 |
5 9 7 8 2 10 11 6 3 4 1 |
Table 10.
The Result of GM (Holding C.O.C).
| Competencies | Weights | Rank |
|---|---|---|
| Position Fixing and Watchkeeping Control Cargo and Ballast Emergency Response (Fire, Flood, etc.) Safety Awareness Use of Navigational Instruments Teamwork and Leadership Pollution Prevention Damage Control Application Meteorological Information Communication Maintaining Seaworthiness |
0.0904 0.0895 0.0744 0.0700 0.1165 0.0400 0.0606 0.1389 0.0798 0.0814 0.1585 |
4 5 8 9 3 11 10 2 7 6 1 |
Table 11.
The Result of GM (Not holding C.O.C).
| Competencies | Weights | Rank |
|---|---|---|
| Position Fixing and Watchkeeping Control Cargo and Ballast Emergency Response (Fire, Flood, etc.) Safety Awareness Use of Navigational Instruments Teamwork and Leadership Pollution Prevention Damage Control Application Meteorological Information Communication Maintaining Seaworthiness |
0.1059 0.0480 0.0534 0.0527 0.1601 0.0562 0.0456 0.0777 0.1345 0.1164 0.1495 |
5 10 8 9 1 7 11 6 3 4 2 |
Table 12.
Differences in Perception between Holders and Non-Holders of C.O.C.
| Competencies | C.O.C Holders | C.O.C Non-holders | ||
|---|---|---|---|---|
| Weights | Rank | Weights | Rank | |
| Position Fixing and Watchkeeping Control Cargo and Ballast Emergency Response (Fire, Flood, etc.) Safety Awareness Use of Navigational Instruments Teamwork and Leadership Pollution Prevention Damage Control Application Meteorological Information Communication Maintaining Seaworthiness |
0.0904 0.0895 0.0744 0.0700 0.1165 0.0400 0.0606 0.1389 0.0798 0.0814 0.1585 |
4 5 8 9 3 11 10 2 7 6 1 |
0.1059 0.0480 0.0534 0.0527 0.1601 0.0562 0.0456 0.0777 0.1345 0.1164 0.1495 |
5 10 8 9 1 7 11 6 3 4 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



