
Submitted:
26 April 2024
Posted:
26 April 2024
You are already at the latest version
Abstract
The integration of diverse distributed generation (DG) units, encompassing both Renewable Energy Sources (RES) and non-RES technologies delves into voltage levels, current distributions, and power flows, aiming to optimize and effectively manage the distribution network. An RES-based DGs such as photovoltaic systems and wind turbines, alongside non-RES units like fuel cells and micro turbines. This study proposes a hybrid approach the Multi-Objective Genetic Algorithm - Grey Wolf Optimizer (MOGA-GWO). By merging the strengths of multi-objective genetic algorithms with the efficiency of the Grey Wolf Optimizer, this advanced algorithm seeks semi-optimal solutions for multi-objective optimization problems. The algorithm aims to improve convergence speed without compromising solution quality, offering a promising solution for optimizing the characteristics of DG and RES integration in distribution networks compared to Cuckoo Search and Simulation Annealing Techniques. Key algorithmic operations include individual representation, initialization, fitness function computation, selection, crossover, mutation, and ending conditions. The DG optimal power flow problem is explored with a focus on minimizing generation costs, improving voltage profiles, minimizing losses, enhancing reliability, integrating renewable energy, reducing environmental impact, managing congestion, and ensuring compliance with operational constraints. Beyond traditional considerations, the study emphasizes neglected objectives and constraints, such as cyber-security concerns, real-time operation, regulatory frameworks, social acceptance, lifecycle environmental impact, grid resilience, data privacy, aging infrastructure compatibility, and economic viability.
Keywords:
MOGA-GWO
; Grey Wolf Optimizer
; optimal power flow
; RES
1. Introduction
Power distribution firms often comprise various types of distributed generators (DG) in a micro-grid system [1]. The integration of DG units with Renewable Energy Resources (RES) like solar PV, Wind Energy Conversion Systems (WECS), and small hydro-turbine systems is affected by physical and climate situations [2]. DG components using non-RES sources, such as electrochemical cells, small-scale gas turbines, and diesel gensets (DiGs), are linked to the network at various locations, taking into consideration the cost of fuel [3]. In the realm of electrical power systems, the electrical power distribution is a complex network that plays a vital role in delivering power from the source to end customers. The integration of RES based DGs steady-state load flow includes a complete investigation of voltage levels, current distributions, and power flows, aiming to ensure the seamless and reliable operation of the distribution system. To achieve this, metaheuristic techniques are one of the best means to solve complex equations, enabling engineers to optimize and manage the distribution network effectively [4]. This study is essential for maintaining system stability, adhering to voltage constraints, and managing power flows effectively in the evolving site of electrical DG [5]. Typically, the DG distribution network achieves a planned, enhanced, and regulated voltage profile, leading to reduced power losses. This improvement results in enhanced economic efficiency and decreased dependence on local utilities, achieved through the application of various techniques. Addressing these challenges is met by optimal power flow (OPF) that involves the effective coordination of DG network
Operations, voltage regulation utilizing devices like voltage regulators and ULTC, as well as reactive power (VAR) compensators [6].
The DG OPF problem major objectives considered by many authors and professionals are Minimization of Generation Costs, Voltage Profile Improvement, Loss Minimization, Reliability and Resilience Enhancement, Renewable Energy Integration, Environmental Impact Reduction, Congestion Management, and Compliance with Operational Constraints [7]. The design outlined aims to establish the most effective operational plan and cost optimization proposal for a micro-grid comprising a photovoltaic array (PV), wind turbine (WT), micro turbine (MT), diesel generator (DiG), fuel cell (FC), and a battery energy storage system (BESS) [8]. Employing an advanced Genetic Algorithm (GA), to minimize the system’s cost function observing client request and safeguarding network safety.
However, it’s worth noting that certain objectives, such as minimizing reactive power losses, integrating Renewable Energy Sources (RES), and considering constraints related to loss minimization, reliability, and other factors, are not taken into account. A complete problem design for real-reactive OPF in distribution networks, as fixed WTs and BESS [9]. A mixed-integer linear programming model analyzing its features and performance across feeders with different operating conditions having volt/var optimization [10].
It is necessary to address uncertainties related with input parameters linked to power generation and load demand from RES DG units [11]. However, objectives and constraints are not considered by many authors such as Cyber-security Concerns, Interoperability and Standardization, Real-Time Operation and Control, Regulatory and Policy Frameworks, Social and Community Acceptance, Lifecycle Environmental Impact, Grid Resilience and Extreme Events, Data Privacy and Ownership, Aging Infrastructure Compatibility, and Economic Viability and Financing.
Various metaheuristic algorithms are applied to optimize the incorporation of DGs from RES in power networks like Particle Swarm Optimization (PSO) [12], Genetic Algorithms (GA) [13], Ant Colony Optimization (ACO) [14], Simulated Annealing (SA) [15], Harmony Search (HS) [16], Differential Evolution (DE) [17], Cuckoo Search (CS) [18], Firefly Algorithm (FA) [19]and Grey Wolf Optimizer (GWO) [20] and hybrid of these techniques [21,22,23]. These metaheuristic algorithms offer varied methods to resolve OPF, including the integration of DG from RES. The algorithm’s choice rests on on the precise features of the OPF and the anticipated trade-offs among exploration and manipulation [24,25,26,27,28,29]. Researchers and practitioners often test with dissimilar metaheuristic techniques to obtain the utmost suitable approach meant for a given application. Hybrid metaheuristic approaches can potentially enhance the overall performance and robustness of optimization algorithms. Many challenges in DG RES distribution networks can be solved to obtain Non-Convex Optimization Spaces, Computational Intensity, Parameter Tuning Sensitivity, Multi-Objective Optimization, Stochastic Nature of Renewable Resources, Integration of Storage Systems, Dynamic System Operation, Parallelization and Scalability, Incorporation of Regulatory Constraints and User-Friendly Implementation [30,31,32,33,34,35]. The integration of various metaheuristic techniques, including Particle Swarm Optimization, Genetic Algorithms, and Ant Colony Optimization, is investigated for optimizing DG integration in power systems. Hybrid metaheuristic approaches are explored for enhanced performance and robustness, with the choice of algorithm contingent on specific optimization problem characteristics and desired trade-offs.
In this paper, a single objective OPF to minimize the fuel costs is considered among the four objectives planned. Second to remaining four objectives is Multi-objective OPF (MO-OPF), while the second objective is minimizing fuel costs, power losses, and enhance life-cycle resilience. The third objective is minimization of fuel costs, voltage deviation at load nodes, and life-cycle environmental impact. The fourth objective is concurrent minimization of fuel costs, voltage deviation, power losses, and environmental impact. The results of four objective functions are compared with optimization algorithms (MOGA-GWO, MOGA-CS [39], MOCS [18], and MOGA [13]). The proposed (Multi-Objective Genetic Algorithm - Grey Wolf Optimizer) DG RES OPF distribution
network will help in improving the convergence speed without compromising solution quality and characteristics of DG and RES integration, such as voltage and capacity constraints compared to the optimization techniques. The MOGA-GWO algorithm introduces an advanced approach to optimization by combining the principles of multi-objective genetic algorithms with the Grey Wolf Optimizer.
The proposed MOGA-GWO algorithm addresses critical challenges in DG RES distribution networks, including non-convex optimization spaces, computational intensity, and parameter tuning sensitivity, multi-objective optimization, stochastic renewable resource nature, storage system integration, dynamic system operation, parallelization, regulatory compliance, and user-friendly implementation. Positioned to enhance convergence speed without compromising solution quality, this algorithm offers a promising avenue for optimizing the intricate characteristics of DG and RES integration in distribution networks. The algorithm involves representing individuals, initializing populations, calculating fitness functions, and performing selection, crossover, and mutation operations. The iterative optimization process continues until specific ending conditions are met, such as reaching a maximum number of generations or achieving predefined fitness criteria. The key contribution lies in leveraging the strengths of both MOGA and GWO to efficiently explore solution spaces, ultimately obtaining semi-optimal solutions for multi-objective optimization problems.
2. Mathematical Modeling of Distribution Power Flow
The objective of Deterministic Optimal Power Flow (OPF) is to minimize a chosen objective function by adjusting the control variables optimally, considering a set of equality and inequality constraints. In general, the formulation of the OPF problem can be outlined as follows, as described in references [16,17,18,19,20,21,22,23,24,25,26]:
, k=1,2,3,…
l=1, 2, 3,…
Where the function F is the objective or fitness, x, y and z are dependent or decision variables, constraints and are equality and inequality based.
In the context of DGs, the dependent parameter vectors ({x, y and z}):
- The Micro-grid Real Generation ()
- Load node voltage, encompassing Distributed Generation (DG) units as PQ model, denoted as ().
- The DG output reactive power, structured as (NPV) PV nodes.
- Branch stream, denoted as .
so, x is equated as:
The vector of control variables {u} comprises:
- Base node voltage ().
- The DG real power units with non-RES ().
- PV () & ) WT terminal nodes.
- Transformer taps setting (t).
- Shunt Reactor Compensation outputs- VAR ().
Hence, control parameter vector stated as:
2.1. The Four Cases Fitness Functions Considered in This Paper
The fitness function can manifest in various ways, and this paper explores several cases. In the first case, minimization of fuel costs is the objective or fitness.
Objective Case 1: minimize Fuel cost.
where for electric grid and DG units represent the cost characteristics.
Case 2: minimize fuel costs, power losses, and enhance life-cycle resilience.
where Plossi, power loss in branch i, power losses weighting factor, RK is at the decision period k weighting factor for power losses, resilience of Power Distribution Network (PDN), NT signifies number of short-term decision periods.
Case 3: minimize fuel costs, voltage deviation at load nodes, and the lifecycle environmental impact (i.e., (1): load shaded and (0): load fed):
In the given expression:
- voltage magnitude Vi at load branch (i),
- voltage deviation weighting factor ,
- Resilience Index (RESI),
- RESI in SPF progression phase I and II as RESIOLEV,
- Total Cost (TCOLEV) in dollars,
- Annual CO2 emission for diesel DG (AEMISDDG) in kg/kWh/year,
- Grid Annual CO2 emission (AEMISGRID) in kg/kWh/year,
- Aggregate CO2 (AEMISOLEV) emission,
- Diesel DGs Annual Operations and Maintenance cost (AOMCDDG) in $/kWh/year,
- (sth) scenario event for the season (se),
- binary variable for load curtailment for bus (i) at time (t)
- Number of severe scenarios .
Case 4: minimize fuel costs, power losses, voltage deviation at load nodes, and environmental impact.
where [25] (10b)
In the provided OPF problem solving context: fenv represents the environmental fitness value, the physical constraints of the Diesel DG (DDG) and micro-turbines (MT) (Pmax,diesel and Pmax,MT) are taken into consideration.
2.2. Equality and Inequality Constraints Considered in the Paper
The constraints such as equality and inequality equations depict standard generation and voltage balance. The DG’s power balance equation for RES and non-RES in a distribution network for backward/forward sweep [22,23] with number of RES DG units (NR):
The inequality constraints include limits on load bus voltage magnitude, reactive power capabilities of DG units, and constraints on branch flow:
The viability section of the problem constraints (12-14). These include limits on DG unit real power output, voltage magnitude at the root node:
where PV bus voltage magnitude, transformer tap setting, and shunt VAR compensation. 𝑇𝐿 signifies total cluster replacements, with (𝑇𝐿 = 30) indicating 14102 pole replacements with penalty factors are λV, λQDG and λS [16].
where dependent variable (x) limit is defined here as (xlim) [21]:
The fixed step DGs size defined in [35]
In the given context:
- ith bus DG allocation .
- DG real power step size.
Rated capacity and rated energy storage power ratio ().
3. Modeling Distributed Generation Units for Optimal Power Flow Analysis
3.1. Modeling Diesel Generators in the Context of Distributed Generation for Optimal Power Flow
Typically, manufacturers provide diesel fuel consumption (Fueldg) in liters per hour (L/h) at various load levels, such as 25% to 100% in kilowatts (kW) generation (Pdg), approximated as a quadratic equation of its power generation:
where, fuel consumption characteristic coefficients are- a, b and c. Therefore, the total (fuel cost fdg $/h) diesel generator can be calculated for diesel fuel price (cdg) in ($/L) as:
Using the above expressions, the fuel cost characteristic is shown in Figure 1 as:
3.2. Fuel Cell Modeling in the Context of DG Units
The fuel cell operating cost is a function () in $/hr of real power () in kW, fuel (natural gas) price to supply the fuel cell () in $/kW-hr and the efficiency of the fuel cell () [5,25]:
The as an actual operating voltage (V) is expressed as [29]:
The FC actual operating voltage is a function of the power level () with nominal power (), thermodynamic fuel cell potential ((=0.91 V), chosen cell potential ( range 0.45 to 0.75 V) & the eqn is [29]:
The estimated fuel cost curve for ($/kWh).
3.3. Micro-Turbine Modeling and Analysis in the Context of Optimal Power Flow
The calculation for micro-turbine (MT) fuel costs (fmt)) in dollars per hour ($/h) is a function of electrical power output in (kW), electric efficiency () and fuel price () in $/kWh given by [5]:
The observation is that the increases with increase in output power [27] defined as a quadratic function of its power with considered in this paper.
3.4. Wind Turbine (WT) Modeling and Analysis in the Context of Optimal Power Flow
To determine the WT power output (), the wind speed () at a specific location and the power curve of the wind turbine. As per references [2,28,30,35], the power curve of a wind turbine if a function of , , cut-in wind velocity (), & :
Here, Pnom = 600 kW, vci = 4 m/s, vnom=16 m/s, and vco== 20 m/s as in Figure 2 illustrates the wind speed data employed based on above equation.
3.5. Photovoltaic (PV) Modeling and Analysis in the Context of Optimal Power Flow
The PV module power output at Standard Test Conditions (STC) () is influenced by the solar irradiance (), ambient temperature () of the site (˚C), temperature coefficient () in degrees Celsius inverse (˚C⁻¹) [31]. The subsequent formula, as outlined in references [33,35], employed to calculate the output of the PV module at Nominal Operating Cell Temperature (NOCT) temperature (TNOCT) in (˚C) with ambient temperature (Ta), photovoltaic module temperature (TC):
3.6. Electric Grid Modeling and Analysis in the Context of Optimal Power Flow
The market energy costs () in $/h as a function of cost coefficients considered in this paper (a=0, b=0.1 $/kWh, and c=5.0*10-5 $/kW²h) and grid real power () in kW is represented by a quadratic function as:
4. DG RES and Diesel General OPF analysis with Met heuristic Methods
The OPF problem is a static optimization technique involved in solving is a non-convex, nonlinear &applicable to a large-network system applicable to analog and discrete control parameters. In multi-objective (MO) optimization [20] is effectively addressed in this paper by employing the MOGA- Grey Wolf Optimizer (MOGA-GWO) [31,32,33,34]:
where functions represents the 1 to k objectives, optimization parameters from 1 to n and parameter space.
Specifically, a solution is considered Pareto-optimal for MOP if there exists no other feasible solution (i.e., ) satisfies the problem constraints) such that for all objectives j, and for at least one objective function .
4.1. MOGA-GWO Implemented in this paper
The MOGA-GWO technique is applied in this paper with the parameters is detailed in Table 1.
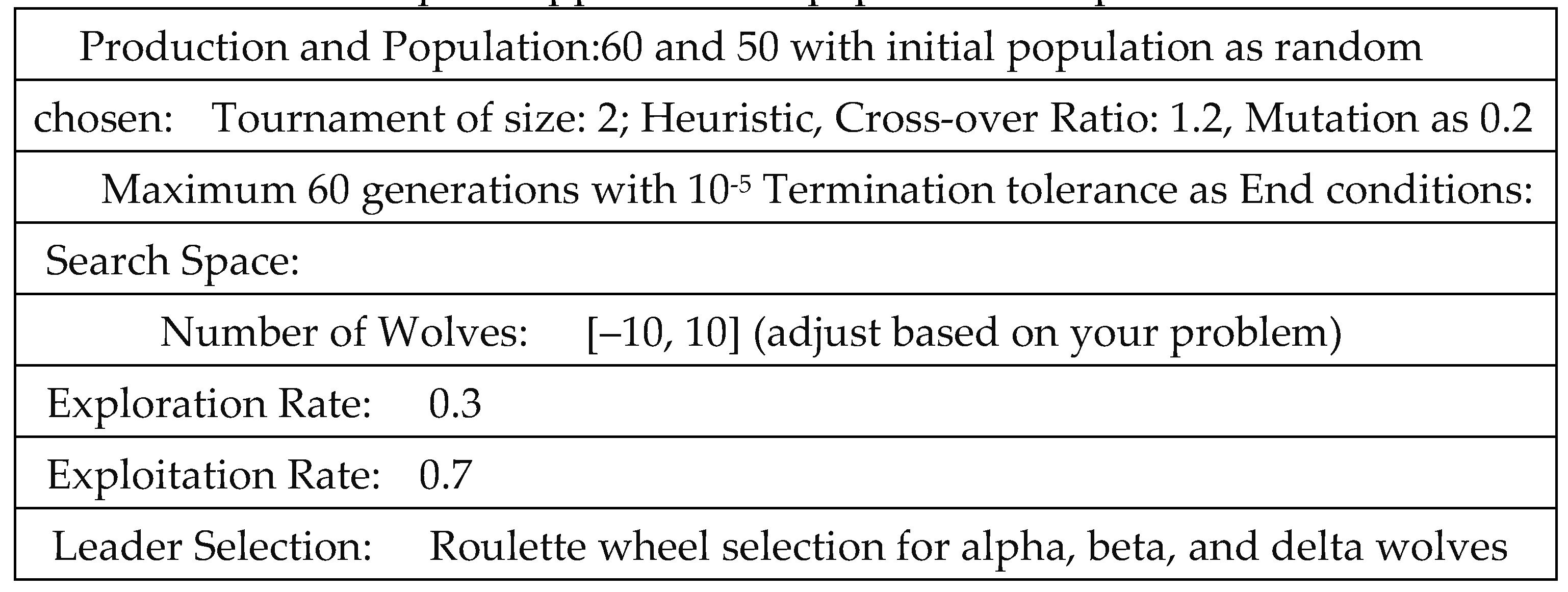
These parameters define the MOGA-GWO configuration for this specific application. Adjustments to the search space and other parameters can be made based on the characteristics of the optimization problem being addressed. The algorithm iterates for 50 generations, maintaining a population size of 50, with the termination condition set based on a maximum generation limit and a tolerance on the function value.
MOGA Initialization: Randomly initialize the population using MOGA techniques.
GWO Initialization: Initialize the positions of wolves based on the solutions obtained from MOGA.
MOGA Evaluation: Evaluate the fitness of solutions using MOGA fitness functions.
GWO Exploration and Exploitation: Adjust GWO parameters for exploration and exploitation during the search.
Additionally, there are additional conditions based on the Grey Wolf Optimizer (GWO) convergence.
These parameters and conditions define how the algorithm progresses through generations, applies crossover and mutation, and determines when the optimization process should terminate. Adjustments can be made based on the specific characteristics of the optimization problem under consideration. Define a weight for combining MOGA and GWO, e.g., 0.7 for MOGA and 0.3 for GWO for a Combination Ratio.
5. Probabilistic Optimal Power Flow: Modeling and Analysis
In the presence of uncertain input variables, the Optimal Power Flow (OPF) problem takes on a probabilistic nature. The randomness associated with factors such as wind speed for wind turbines (WT) and solar irradiance photovoltaic (PV) units introduces uncertainty [13]. Additionally, accurate load demand forecasts are challenging due to unforeseen conflicts, prediction errors, or load disparities, making load demand a random variable as well. The occurrence of such random factors constitutes the primary source of uncertainties [11,38]. This allows for a comprehensive understanding and analysis of the impact of uncertainties on the optimal power flow solution.
5.1. Modeling Wind Speed for Probabilistic Optimal Power Flow Analysis
The probability density function (PDF) of wind speed at a specific location is commonly modeled using a Weibull distribution, as described in references [28,29,39,40] with random numbers (r) on the interval [0, 1], constants scale (c) and shape (k) parameters by means of median wind speed vm & standard deviation [29]:
The cumulative density function (CDF) is given by:
Its inverse has been employed for calculating the wind speed.:
5.2 Modeling Solar Irradiance for Probabilistic Optimal Power Flow Analysis
Essentially, solar irradiance exhibits a stochastic nature, necessitating the adoption of a probability density function. The uncertainty associated with solar irradiance can be characterized by a normal PDF, as described in references [13,41,42,43] with error (erf) & inverse error (erf-1) function, hourly median value () and standard deviation ():
The normal CDF is given by:
The solar irradiance CDF along with its inverse is:
This expression uses the error function and its inverse, along with the mean and standard deviation of solar irradiance, to calculate the solar irradiance from a random variable with a uniform distribution. The provided expression utilizes the error function and its inverse, along with the mean and standard deviation of solar irradiance, to calculate solar irradiance from a random variable with a uniform distribution.
5.3. Probabilistic density function (PDF) Load Modeling for Optimal Power Flow Analysis
The PDF of the power flow is assumed to follow a normal distribution with mean value (), standard deviation () of load (L) as described in references [11,13,14,15,35].
The load values are generated using the normal CDF along with its inverse random numbers (r) on the interval [0, 1] and error (erf) function and the inverse error (erf-1) function with a standard deviation of 5%.
5.4. Statistical Evaluation in Probabilistic OPF
The probabilistic Optimal Power Flow (OPF) as a function of input random variables (X) and output random variables (Y) is stated as:
These approaches for our proposed technique can be broadly defined into three major steps:
2. Analytical Methods: Analytical methods for evaluating statistical features are discussed in references [41,42]
6. Simulation Results
The OPF proposed in this paper as in Figure 3 is performed on a adapted IEEE 34-DG network. In the modified test feeder, five different Distributed Generation (DG) units were introduced. The objectives and constraints and the parameters dependencies of the network and the metaheuristic algorithm are discussed in Section 3 and Section 4.
The nodes 812 is with wind turbine, 816 micro turbine, 848 with Fuel Cell (FC), 854 with solar PV, and 862 with diesel generator (DDG) for the DG network operate at a 0.9 power factor. The FC has the autonomous capability to regulate real power and voltage as PV operating mode.
The information regarding the lines and loads is presented in Table 2 and the load points hourly forecasted loads as in Figure 4. Table 3 provides DG units data with a total of 9 parameters, and the bounds for these control variables as in Table 4 with lesser & higher limits of 0.950 & 1.05 p.u., correspondingly.
6.1. Deterministic OPF (DOPF) Problem Solving for Wind Turbine (WT) and Solar Photovoltaic
In the DOPF, the generated wt and pv power, along with the loads at their specified values as in Table 3 and 4. Four optimization cases as discussed in Section2 at minimum and maximum load levels (T=2h and T=14h) as in Table 5. The voltage under the above cases discussed and found that the parameters are within the constrained limits as in Figure 5 and Figure 6 at all the nodes.
The study involves determining the optimal configurations of organized parameters across different load levels. Figure 7 visually presents the day wise values of fuel rate, energy loss, & maximum potential deviation corresponding to these optimal control variable settings. Notably, minimizing fuel cost in Case 1 leads to the highest energy loss among all cases examined. In Case 2, the minimum energy loss is achieved, but at the expense of increased fuel cost and voltage deviation reaching their maximum values. Case 3 shows an increase in fuel cost compared to Case 1 & a decrease compared to Case 2. Simultaneously, energy loss decreases compared to Case 1 & increases compared to Case 2. Analyzing the results depicted in Figure 5, Figure 6 and Figure 7, it becomes evident that Case 4 serves as a compromise solution for the Optimal Power Flow (OPF) problem. This implies a balanced trade-off among fuel cost, energy loss, and voltage deviation, making it a promising choice for achieving optimization objectives.
6.2. Probabilistic Analysis of Optimal Power Flow (OPF)
The probabilistic analysis of Optimal Power Flow (OPF) delves into evaluating the optimal power flow amidst uncertain conditions, incorporating variables such as wind speed, solar irradiance, and load variations, all exhibiting stochastic behavior. Statistical methods are applied to comprehend the probability distribution of output variables, offering insights into system behavior in the face of uncertainties. Within this framework, power generation from wind turbine & photovoltaic units, load level, are treated as un-correlated input random variables. The 2m+1 point estimate method is integrated with the Multi-Objective Genetic Algorithm - Grey Wolf Optimizer (MOGA-GWO) to ascertain the OPF. Table 6 provides the median & standard deviation of the OPF results. Various optimization cases for different time intervals (14h, 8h, and 2h) are explored in Cases 1 and 4. Furthermore, Figure 8 illustrates the Probability Density Functions (PDFs) for optimization Case 4 and Time=14h, generated using the Gram-Charlier expansion. This graphical representation aids in understanding the distribution of outcomes, contributing to a comprehensive analysis of the system’s performance under probabilistic influences.
To evaluate the impact of input random variables on statistical characteristics of results, the probabilistic OPF is conducted for 5 distinct combinations of these variables, and the findings are summarized in Table 7. The results suggest that the input random variable L (total power load) exerts a more pronounced influence on the standard deviation of the output variables in comparison to the input random variables Pwt and Ppv (power outputs of wind turbine and photovoltaic units). This observation can be ascribed to the considerably higher magnitude of the total power load within the distribution network, which surpasses the power outputs of the wind turbine and photovoltaic units. The variations in the total power load contribute significantly to the overall variability of the system’s performance, underscoring the importance of understanding and managing this influential factor in the probabilistic analysis.
Figure 9 depicts the voltage curves compared with that of the proposed Multi-Objective Genetic Algorithm - Grey Wolf Optimizer (MOGA-GWO) with other algorithms, namely Multi-Objective Genetic Algorithm with Cuckoo Search (MOGA-CS), Multi-Objective Cuckoo Search (MOCS) [39], and Multi-Objective Genetic Algorithm (MOGA), all applied to the 4th case as illustrated in Figure 9. Algorithms for optimal power flow of DG units for the radial 34 bus system for the 4th case. According to Figure 9, the suggested method can maintain better voltage profile by reducing the voltage deviation and also helping in attaining the other objectives. The minimum voltage with MOGA-GWO is 0.9546, MOGA-CS is 0.9036, MOCS is 0.8323 and MOGA is 0.6686 at bus node 18. The suggested MOGA-GWO method demonstrates the ability to maintain a better voltage profile by reducing voltage deviation. This implies a more stable and controlled voltage distribution throughout the system. MOGA-GWO not only reduces voltage deviation but also contributes to achieving other objectives associated with optimal power flow for DG units. The specifics of these additional objectives are not detailed but are implied to be favorable.
The Mean Square Error (MSE) convergence curves for different optimization algorithms provide insights into how quickly and effectively each algorithm converges to the optimal solution over successive iterations. In your scenario, MOGA-GWO, MOGA-CS, MOCS, and MOGA are compared based on their MSE values at 40 iterations. The MOGA-GWO algorithm exhibits a relatively low MSE of 0.06 at 40 iterations indicating a good convergence towards optimal solutions. The low MSE suggests that the predicted solutions closely match the actual solutions. However, MO-CS shows a higher MSE of 0.36 and MOGA is 0.38 at 40 iterations. MOGA-GWO demonstrates the best convergence performance at 40 iterations, as evidenced by its lowest MSE compared with MOCS and MOGA. MOCS and MOGA-CS show similar MSE values at 40 iterations and exhibit stability since the MS remained almost the same. This stability could indicate that these algorithms might have reached a near-optimal solution.
The Figure 11 shows the fitness curve analysis of four multi-objective optimization algorithms (MOGA-GWO, MOGA-CS [39], MOCS [18], and MOGA [13]) in the 4th case over 500 iterations. The initial fitness value with MOGA is 850, MOCS is 810, MOGA-CS is 708 and that of MOGA-GWO is 680.
The fitness values for all algorithms consistently decreased and the objectives being optimized. At the end of the 500 iterations, the MOGA-GWO achieved the lowest fitness value of 580, while that of MOGA-CS achieved a fitness value of 630, MOCS is 680 and MOGA is 740. The MOGA-GWO demonstrated the best convergence and achieved the lowest final fitness value, suggesting superior optimization performance. The MOGA-CS also performed well, with the second-lowest final fitness value. The MOCS and MOGA showed higher final fitness values, indicating relatively slower convergence. MOGA-GWO and MOGA-CS are highlighted as having better convergence compared to MOCS and MOGA. The lower initial fitness value of MOGA-GWO and its subsequent fast convergence to 580 indicate a faster convergence speed compared to the other algorithms. The fitness curve analysis suggests that MOGA-GWO is the most effective algorithm in optimizing the objectives, achieving both a low initial value and a rapid convergence to the best fitness value for the given optimization problem in the 4th case, emphasizing its superior convergence and achievement of low fitness values.
7. Conclusions
In this study, the MOGA-GWO algorithm is adopted to optimize Distributed Generation (DG) power flow in a distribution network. The technical objectives of hybrid DG installation and Optimal Power Flow (OPF) were systematically investigated in four distinct cases, each addressing various optimization criteria such as fuel cost & power losses minimization, life-cycle resilience, potential deviation at load nodes, &lifecycle environmental impact.
The study was conducted on the IEEE 34-bus power network system by strategically placing DG units with Renewable Energy Sources (RES), resulting in notable reductions in network power losses, improvements in voltage profiles, and achievement of other specified objectives while adhering to operational constraints. The major contributions of this work are:
- MOGA-GWO outperformed Hybrid GWO-CS, MOGA, and MOCS in terms of power loss reduction, voltage profile improvement, resilience enhancement, and adherence to environmental constraints. The Multi-DGs reconfiguration placement using the MOGA-GWO algorithm led to a substantial reduction in system power losses, achieving a decrease of up to 41.9355 kW.
- Significant improvements in voltage profile and stability were achieved through controlled power loss mitigation facilitated by the reconfiguration and installation of multiple DG units. The proposed MOGA-GWO algorithm demonstrated quick convergence and strong global optimization capabilities, mitigating the risk of falling into local optima and thereby enhancing its overall performance.
- The study aimed at the comprehensive optimization of various indices, including economic benefits, voltage stability, deviation and maintenance, system resilience, real power losses minimization, and environmental impact. The MOGA-GWO algorithm effectively addressed these diverse objectives under different scenarios and constraints. The complexity of the planning model’s objective function was instrumental in considering multiple demands and improving the overall performance of the planning scheme.
- The integration of DG and RES in the planning process contributed to enhanced clean energy consumption and optimized power flow. This approach not only reduced network losses and voltage deviations but also improved system resiliency and environmental impact.
As a summary, the MOGA-GWO algorithm emerged as a reliable and effective method for DG placement and OPF in distribution network systems. Its superior performance across various objectives positions it as a promising solution compared to simpler metaheuristic techniques, offering notable benefits in terms of power loss reduction, voltage profile improvement, and overall planning scheme optimization.
Author Contributions
For research articles with several authors, a short paragraph specifying their individual contributions must be provided. The following statements should be used “Conceptualization, P.T. and P.K.Y.K. methodology, P.T. .; software, P.K.Y.K..; validation, P.T. and P.K.Y.K..; formal analysis, P.T..; investigation, P.K.Y.K..; resources, P.T. and N.K.D.; data curation, P.K.Y.K.; writing—original draft preparation, P.K.Y.K.; writing—review and editing, P.T..; visualization, P.T. and N.K.D..; supervision, P.T., and N.K.D.; project administration, P.T., and N.K.D .; funding acquisition, N.K.D.
Funding
“This research received no external funding”
Conflicts of Interest
“The authors declare no conflicts of interest.”
References
- Carley, Sanya. “Distributed generation: An empirical analysis of primary motivators.” Energy policy 37, no. 5 (2009): 1648-1659.
- Botan, Antonio CB, Ramiro G. R Camacho, Geraldo Lucio Tiago Filho, and Maria Claudia CO Botan. “Comparative analysis for distributed generation using ultra--low head hydro, solar and wind energies.” International Journal of Energy Research 45, no. 11 (2021): 16310-16328.
- El-Bidairi, K. S. N. “Fuzzy-grey wolf optimization for energy storage sizing and power management in microgrids.” PhD diss., University Of Tasmania, 2019.
- Adetunji, Kayode E., Ivan W. Hofsajer, Adnan M. Abu-Mahfouz, and Ling Cheng. “A review of metaheuristic techniques for optimal integration of electrical units in distribution networks.” IEEE Access 9 (2020): 5046-5068.
- Barnwal, Akhilesh Kumar, Lokesh Kumar Yadav, and Mitresh Kumar Verma. “A multi-objective approach for voltage stability enhancement and loss reduction under PQV and P buses through reconfiguration and distributed generation allocation.” IEEE Access 10 (2022): 16609-16623.
- Sultana, U. , Azhar B. Khairuddin, M. M. Aman, A. S. Mokhtar, and N. Zareen. “A review of optimum DG placement based on minimization of power losses and voltage stability enhancement of distribution system.” Renewable and Sustainable Energy Reviews 63 (2016): 363-378.
- Paliwal, Priyanka, N. P. Patidar, and R. K. Nema. “Planning of grid integrated distributed generators: A review of technology, objectives and techniques.” Renewable and sustainable energy reviews 40 (2014): 557-570.
- Li, Chendan, Federico De Bosio, Fang Chen, Sanjay K. Chaudhary, Juan C. Vasquez, and Josep M. Guerrero. “Economic dispatch for operating cost minimization under real-time pricing in droop-controlled DC microgrid.” IEEE Journal of emerging and selected topics in power electronics 5, no. 1 (2016): 587-595.
- Gabash, Aouss, and Pu Li. “Active-reactive optimal power flow in distribution networks with embedded generation and battery storage.” IEEE Transactions on Power Systems 27, no. 4 (2012): 2026-2035.
- Shen, Zhijun, Mingbo Liu, Lixin Xu, and Wentian Lu. “Bi-level mixed-integer linear programming algorithm for evaluating the impact of load-redistribution attacks on Volt-VAR optimization in high-and medium-voltage distribution systems.” International Journal of Electrical Power & Energy Systems 128 (2021): 106683.
- Kumar, K. Prakash, and B. Saravanan. “Recent techniques to model uncertainties in power generation from renewable energy sources and loads in microgrids–A review.” Renewable and Sustainable Energy Reviews 71 (2017): 348-358.
- Faria, Pedro, João Soares, Zita Vale, Hugo Morais, and Tiago Sousa. “Modified particle swarm optimization applied to integrated demand response and DG resources scheduling.” IEEE Transactions on smart grid 4, no. 1 (2013): 606-616.
- Almabsout, Emad Ali, Ragab A. El-Sehiemy, Osman Nuri Uc An, and Oguz Bayat. “A hybrid local search-genetic algorithm for simultaneous placement of DG units and shunt capacitors in radial distribution systems.” IEEE Access 8 (2020): 54465-54481.
- Ogunsina, Adeseye Amos, Moses Omolayo Petinrin, Olutomilayo Olayemi Petinrin, Emeka Nelson Offornedo, Joseph Olawole Petinrin, and Gideon Olusola Asaolu. “Optimal distributed generation location and sizing for loss minimization and voltage profile optimization using ant colony algorithm.” SN Applied Sciences 3 (2021): 1-10.
- Hafez, Ahmed A., Almoataz Y. Abdelaziz, Mohamed A. Hendy, and Alaa FM Ali. “Optimal sizing of off-line micro-grid via hybrid multi-objective simulated annealing particle swarm optimizer.” Computers & Electrical Engineering 94 (2021): 107294.
- Kayalvizhi, S. , and Vinod Kumar DM. “Optimal planning of active distribution networks with hybrid distributed energy resources using grid-based multi-objective harmony search algorithm.” Applied Soft Computing 67 (2018): 387-398.
- Kumar, Sajjan, Kamal K. Mandal, and Niladri Chakraborty. “Optimal DG placement by multi-objective opposition based chaotic differential evolution for techno-economic analysis.” Applied Soft Computing 78 (2019): 70-83.
- Vijaya Kumar, N. M., S. Charles Raja, S. Arun Mozhi, and J. Jeslin Drusila Nesamalar. “Effective Power Loss Management in the Distribution System by the Hybrid Cuckoo Search Grey Wolf Optimizer.” IETE Journal of Research (2023): 1-13.
- Shaik, Aarif, and Suresh Kumar Sudabattula. “Optimal PV Distributed Generators Allocation Using Firefly Algorithm to Enhance Voltage Profile.” SN Computer Science 4, no. 5 (2023): 510.
- Pujari, Harish Kumar, and Mageshvaran Rudramoorthy. “Grey wolf optimization algorithm for solving distribution network reconfiguration considering distributed generators simultaneously.” International Journal of Sustainable Energy 41, no. 11 (2022): 2121-2149.
- Aman, M. M., G. B. Jasmon, Ab Halim Abu Bakar, and Hazlie Mokhlis. “A new approach for optimum simultaneous multi-DG distributed generation Units placement and sizing based on maximization of system load ability using HPSO (hybrid particle swarm optimization) algorithm.” Energy 66 (2014): 202-215.
- Poonam, Singh, Pandit Manjaree, and Srivastava Laxmi. “Comparison of traditional and swarm intelligence based techniques for optimization of hybrid renewable energy system.” Renewable Energy Focus 35 (2020): 1-9.
- Llerena-Pizarro, Omar, Nestor Proenza-Perez, Celso Eduardo Tuna, and Jose Luz Silveira. “A PSO-BPSO technique for hybrid power generation system sizing.” IEEE Latin America Transactions 18, no. 08 (2020): 1362-1370.
- Ananth, D. V. N. , and K. S. T. Vineela. “A review of different optimization techniques for solving single and multi-objective optimization problem in power system and mostly unit commitment problem.” International Journal of Ambient Energy 42, no. 14 (2021): 1676-1698.
- Picioroaga, Irina, Madalina Luca, Andrei Tudose, Dorian Sidea, Mircea Eremia, and Constantin Bulac. “Resilience-Driven Optimal Sizing of Energy Storage Systems in Remote Microgrids.” Sustainability 15, no. 22 (2023): 16002.
- Vilaisarn, Youthanalack, Yuri R. Rodrigues, Morad Mohamed Abdelmageed Abdelaziz, and Jérôme Cros. “A deep learning based multiobjective optimization for the planning of resilience oriented micro-grids in active distribution system.” IEEE Access 10 (2022): 84330-84364.
- S. Campanari, E. Macchi, Technical and Tariff Scenarios Effect on Micro-turbine Tri-generative Applications, J. Eng. Gas Turb. Power 126 (2004) 581-589.
- http://www.windturbines.ca/vestas_v44.htm, 11.12.2012.
- Alaswad, Abed, Abdelnasir Omran, Jose Ricardo Sodre, Tabbi Wilberforce, Gianmichelle Pignatelli, Michele Dassisti, Ahmad Baroutaji, and Abdul Ghani Olabi. “Technical and commercial challenges of proton-exchange membrane (PEM) fuel cells.” Energies 14, no. 1 (2020): 144.
- Gianto, Rudy. “Steadystate model of DFIG--based wind power plant for load flow analysis.” IET Renewable Power Generation 15, no. 8 (2021): 1724-1735.
- Ullah, Zia, Shaorong Wang, Jordan Radosavljević, and Jinmu Lai. “A solution to the optimal power flow problem considering WT and PV generation.” IEEE Access 7 (2019): 46763-46772.
- Kazmi, Syed Ali Abbas, Muhammad Khuram Shahzad, and Dong Ryeol Shin. “Multi-objective planning techniques in distribution networks: A composite review.” Energies 10, no. 2 (2017): 208.
- Nallolla, Chinna Alluraiah, Vijayapriya P, Dhanamjayulu Chittathuru, and Sanjeevi kumar Padmanaban. “Multi-Objective Optimization Algorithms for a Hybrid AC/DC Micro-grid Using RES: A Comprehensive Review.” Electronics 12, no. 4 (2023): 1062.
- Ming, Mengjun, Rui Wang, Yabing Zha, and Tao Zhang. “Multi-objective optimization of hybrid renewable energy system using an enhanced multi-objective evolutionary algorithm.” Energies 10, no. 5 (2017): 674.
- Atwa, Y. M. , Ehab F. El-Saadany, M. M. A. Salama, R. Seethapathy, M. Assam, and S. Conti. “Adequacy evaluation of distribution system including wind/solar DG during different modes of operation.” IEEE Transactions on Power systems 26, no. 4 (2011): 1945-1952.
- Mukhopadhyay, Bineeta, and Debapriya Das. “Optimal multi-objective expansion planning of a droop-regulated islanded micro-grid.” Energy 218 (2021): 119415.
- Shaaban, Mostafa F., and E. F. El-Saadany. “Accommodating high penetrations of PEVs and renewable DG considering uncertainties in distribution systems.” IEEE transactions on power systems 29, no. 1 (2013): 259-270.
- Mellouk, Lamyae, Abdessadek Aaroud, Mohamed Boulmalf, Khalid Zine-Dine, and Driss Benhaddou. “Development and performance validation of new parallel hybrid cuckoo search–genetic algorithm.” Energy Systems 11 (2020): 729-751.
- Hemeida, Mahmoud G., Salem Alkhalaf, Tomonobu Senjyu, Abdalla Ibrahim, Mahrous Ahmed, and Ayman M. Bahaa-Eldin. “Optimal probabilistic location of DGs using Monte Carlo simulation based different bio-inspired algorithms.” Ain Shams Engineering Journal 12, no. 3 (2021): 2735-2762.
- Duarte, Yorlandys Salgado, Janusz Szpytko, and Alfredo M. del Castillo Serpa. “Monte Carlo simulation model to coordinate the preventive maintenance scheduling of generating units in isolated distributed Power Systems.” Electric Power Systems Research 182 (2020): 106237.
- Khan, Arbaz, Manil T. Mohan, and Ricardo Ruiz-Baier. “Conforming, nonconforming and DG methods for the stationary generalized Burgers-Huxley equation.” Journal of Scientific Computing 88 (2021): 1-26.
Figure 1.
Characteristics of Fuel Costs for Distributed Generation Units.
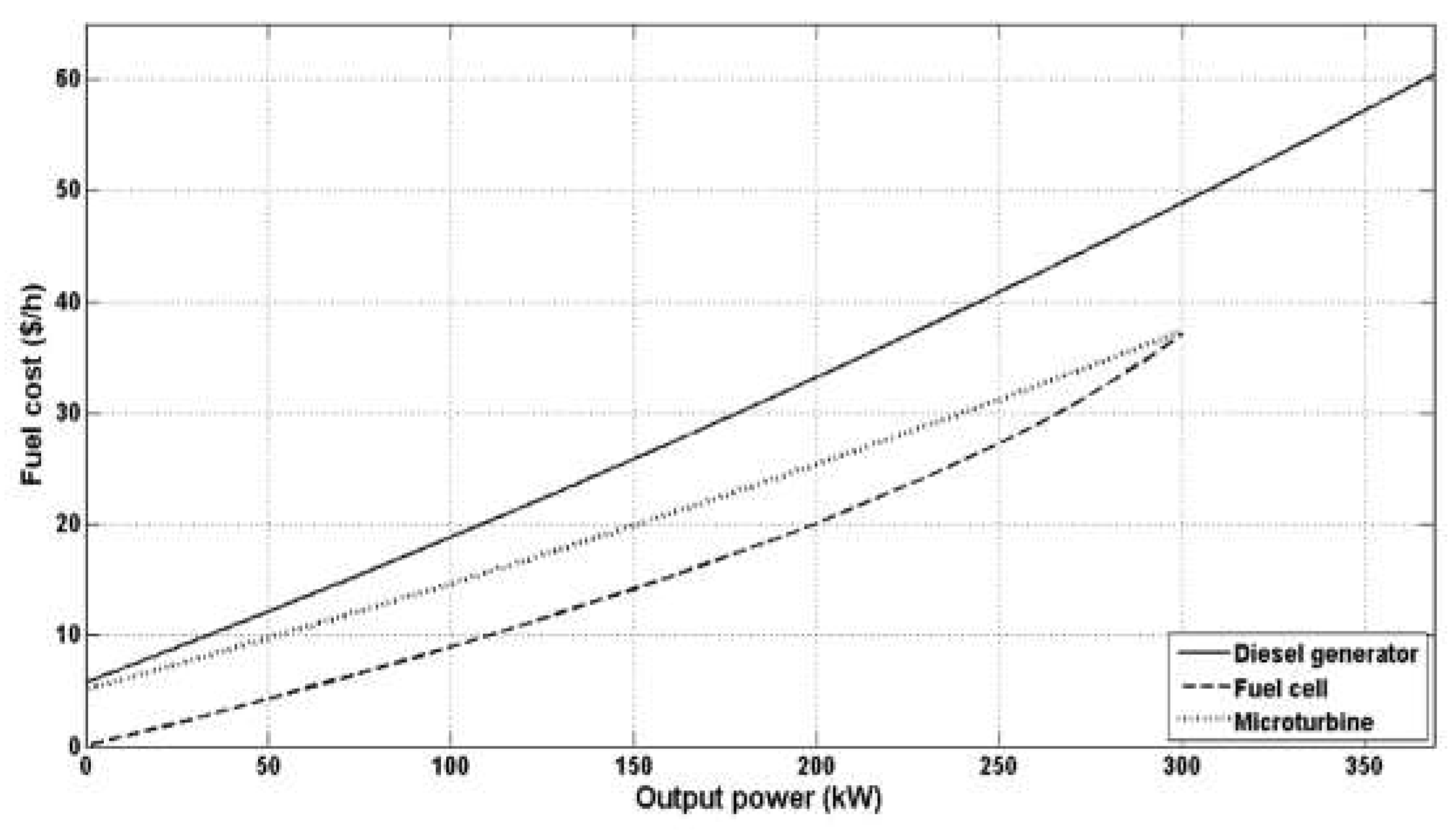
Figure 2.
displays the data for wind speed, ambient temperature, and solar irradiance.
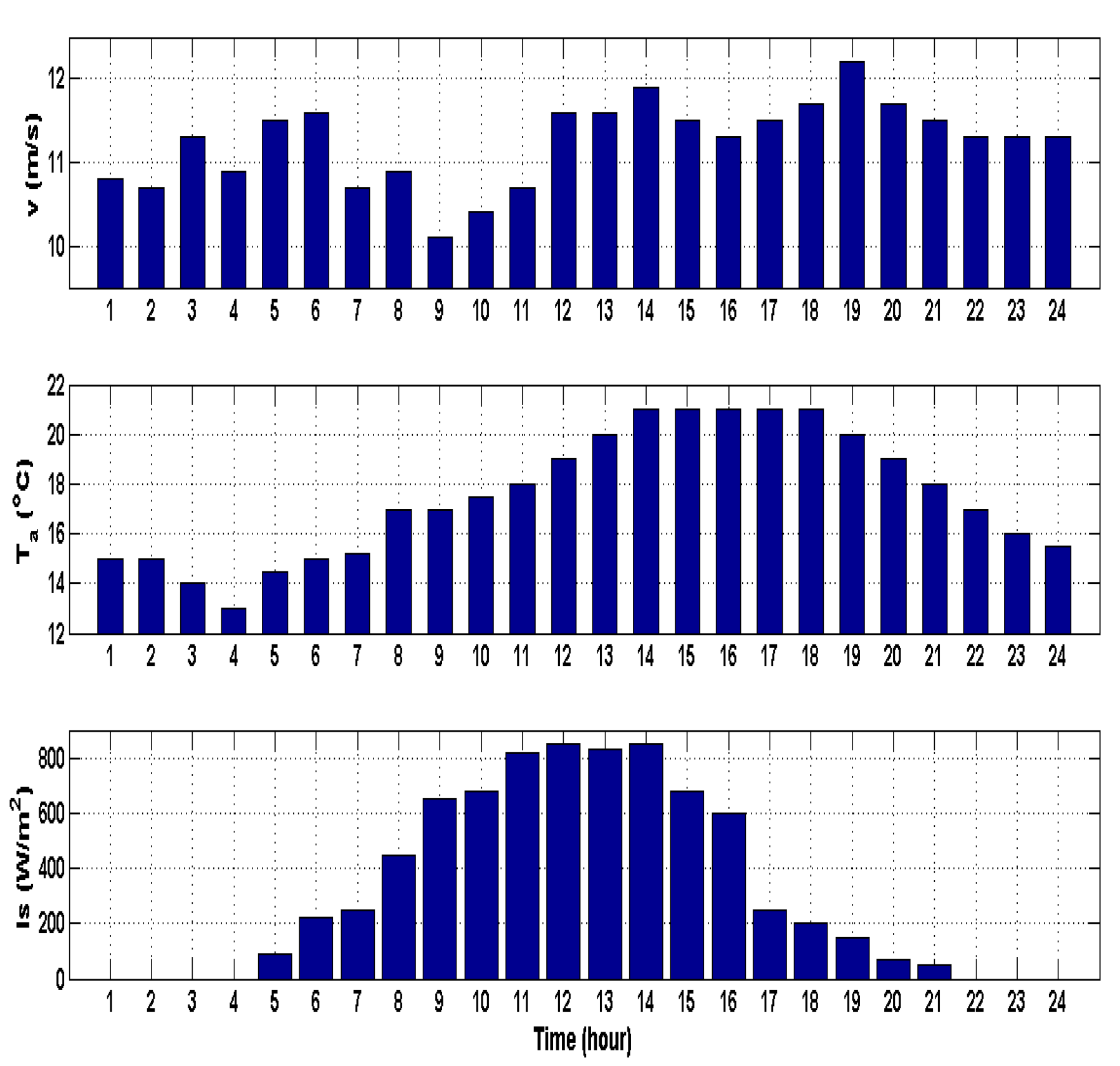
Figure 3.
Altered IEEE 34-node test feeders with modifications.
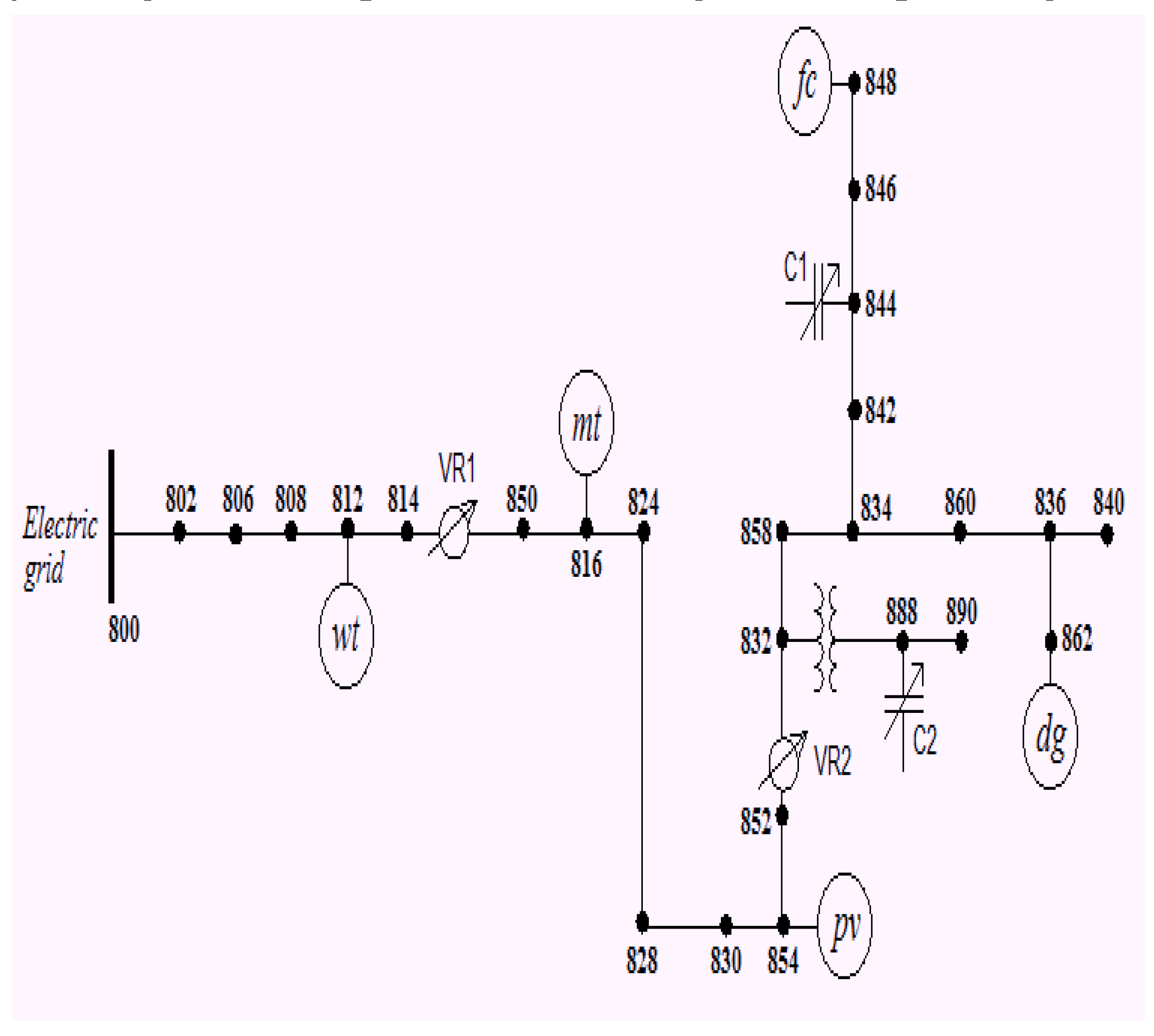
Figure 4.
Day wise load curve within the adapted IEEE 34-node test feeder.
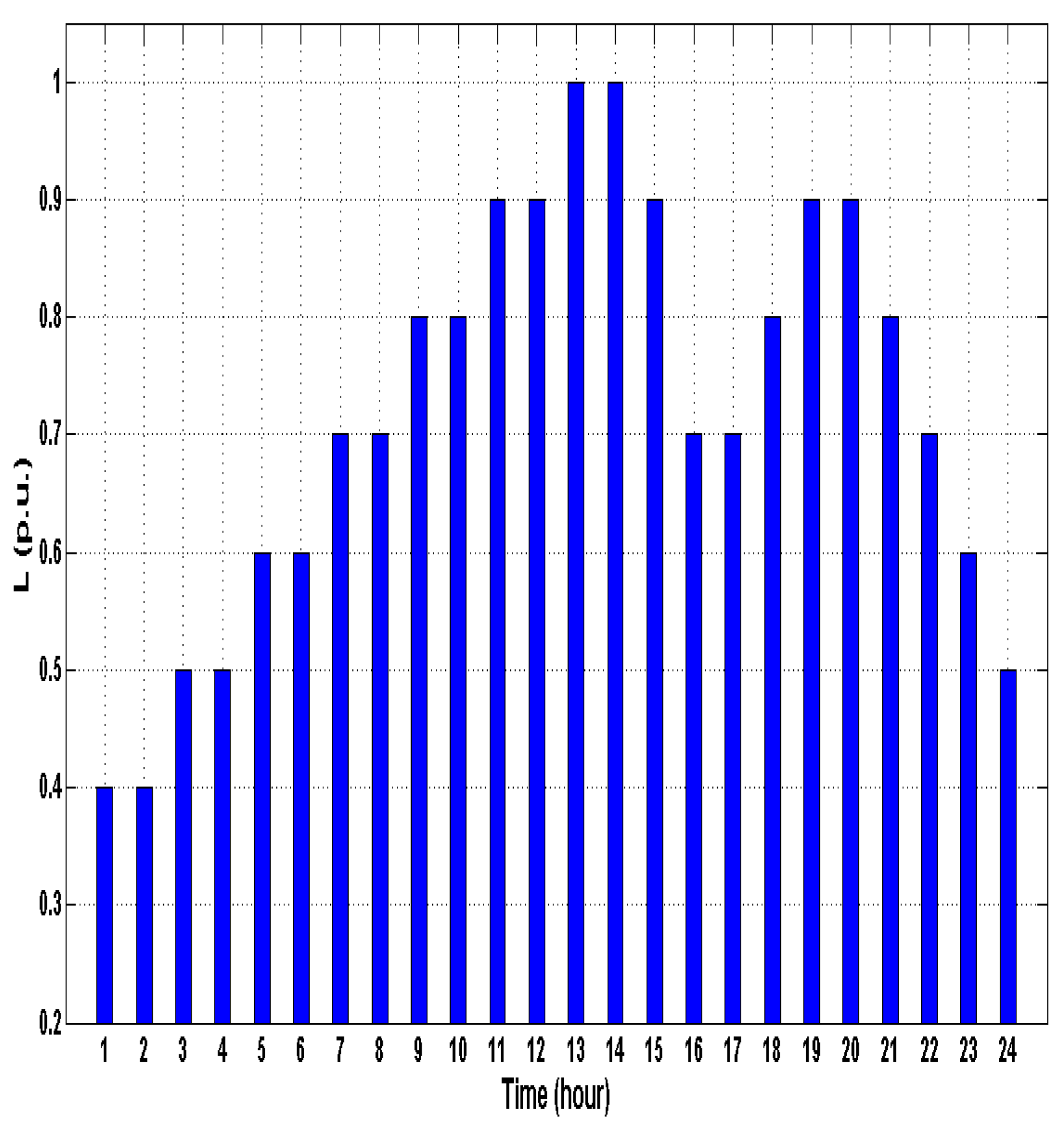
Figure 5.
Potential profile for a max load level (T=14 h).
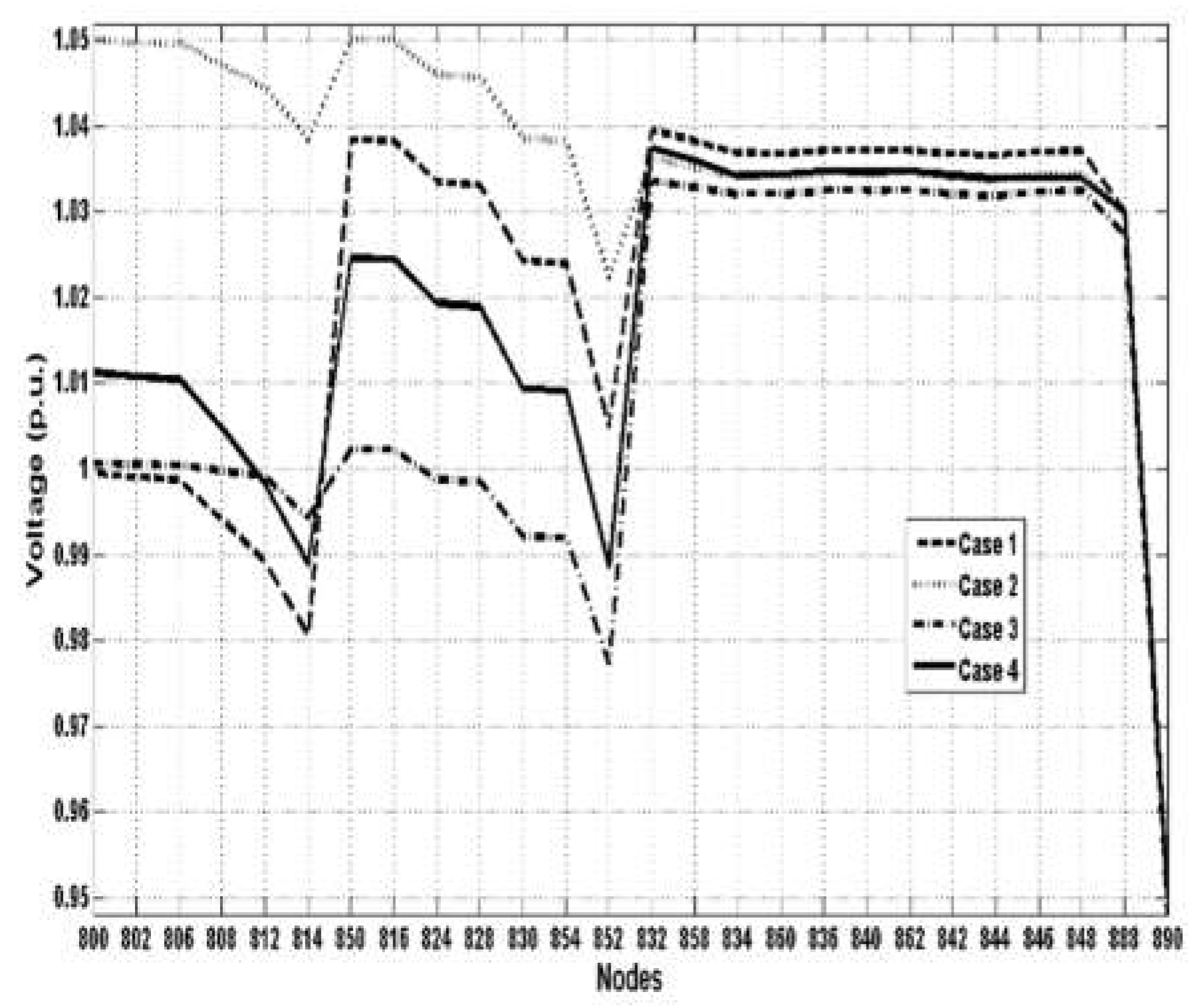
Figure 6.
The potential profile for the minimum load level at time T=2 hours.
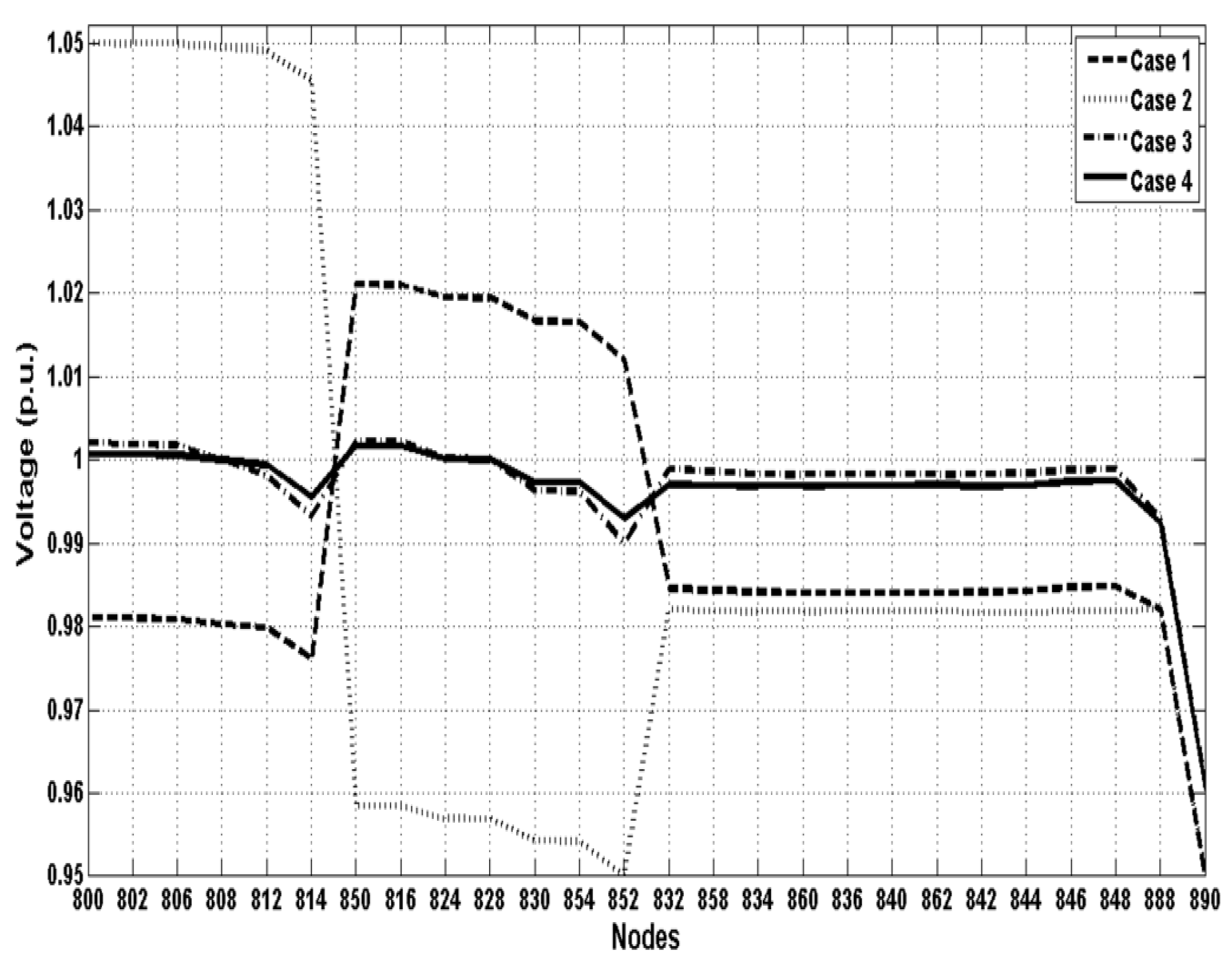
Figure 7.
Illustrates the day wise values of energy costs, energy losses, and maximum voltage deviation.
Figure 7.
Illustrates the day wise values of energy costs, energy losses, and maximum voltage deviation.
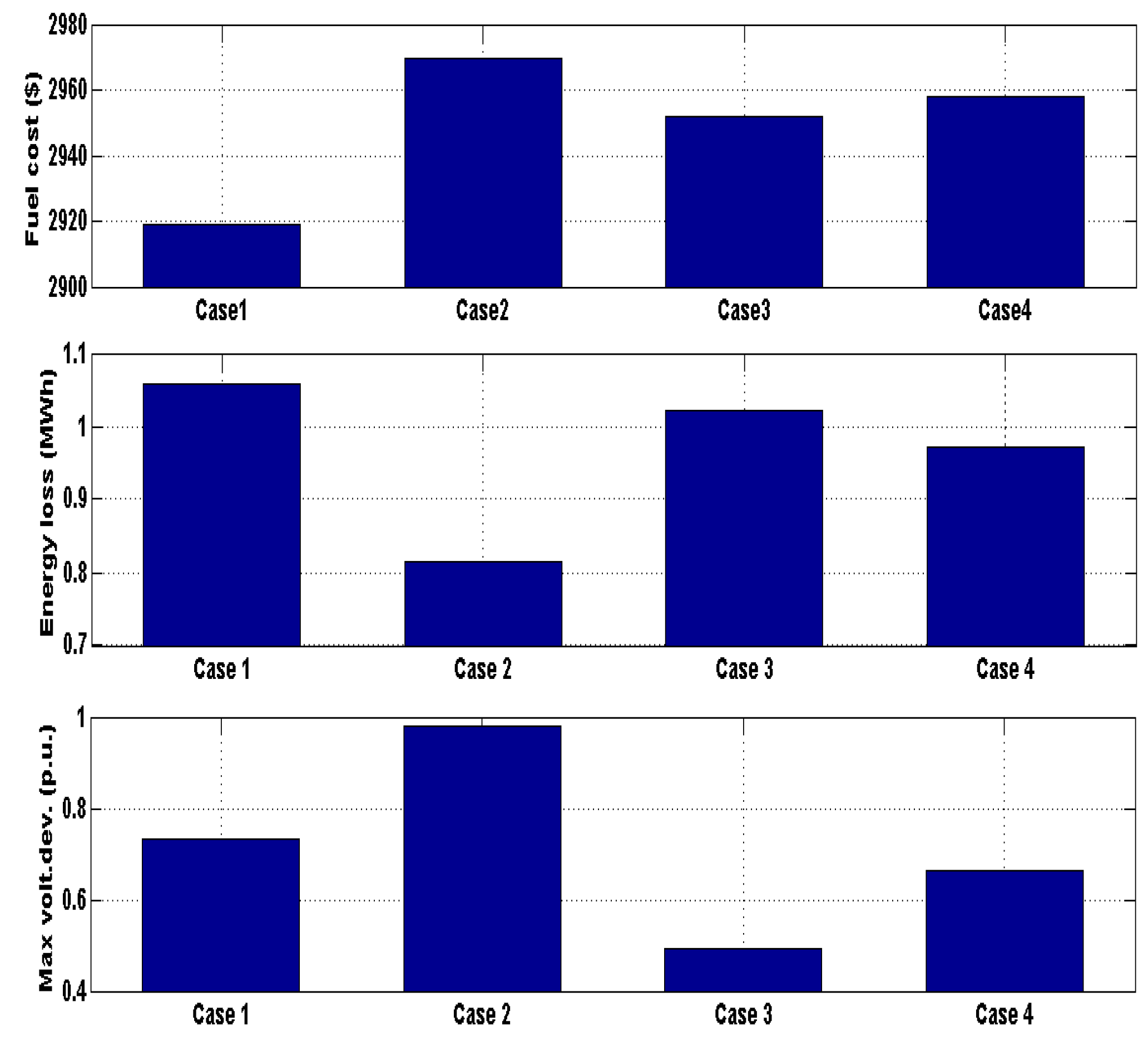
Figure 8.
OPF results for Case 4 &Time=14 h.
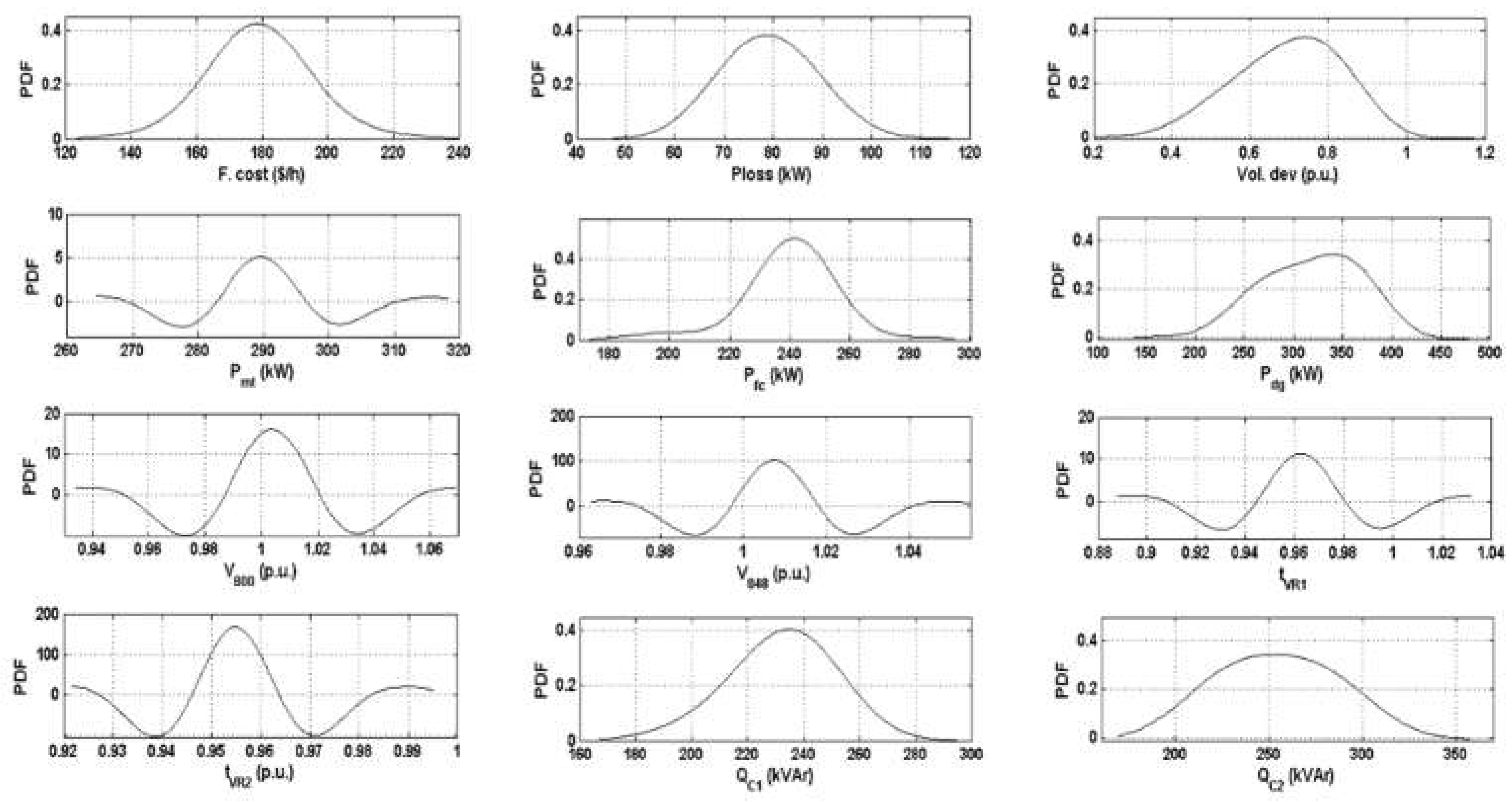
Figure 9.
Radial 34 bus system voltage profile characteristics with MOGA-GWO, MOGA-CS, MOCS and MOGA.
Figure 9.
Radial 34 bus system voltage profile characteristics with MOGA-GWO, MOGA-CS, MOCS and MOGA.

Figure 10.
MSE Convergence Analysis of Multi-Objective Optimization Algorithms: A Comparative Study of MOGA-GWO, MOGA-CS, MOCS, and MOGA for a 500 Iterations programming.
Figure 10.
MSE Convergence Analysis of Multi-Objective Optimization Algorithms: A Comparative Study of MOGA-GWO, MOGA-CS, MOCS, and MOGA for a 500 Iterations programming.
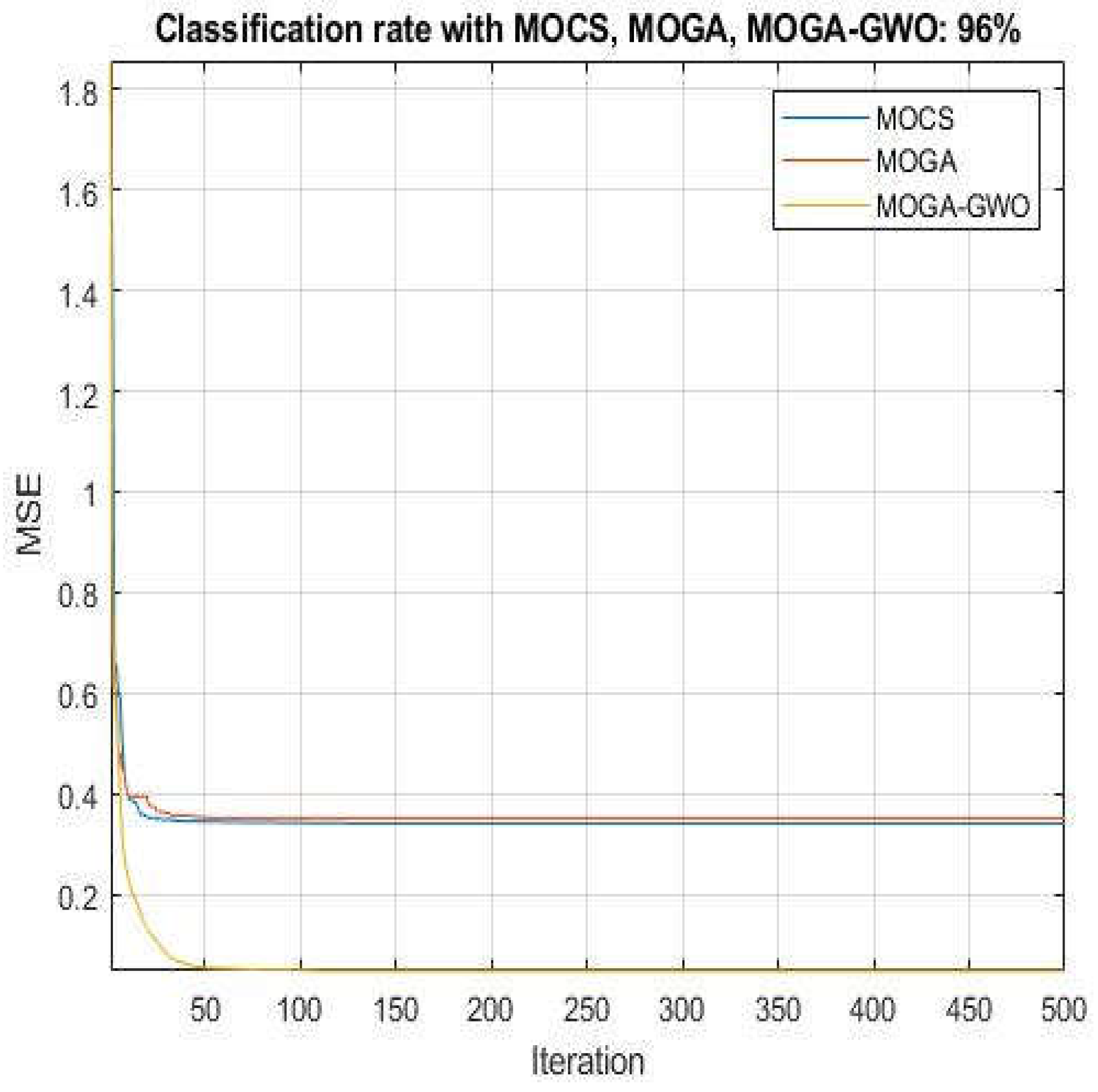
Figure 11.
Fitness Curve Analysis of Multi-Objective Optimization Algorithms: A Comparative Study of MOGA-GWO, MOGA-CS, MOCS, and MOGA in the 4th Case Over 500 Iterations.
Figure 11.
Fitness Curve Analysis of Multi-Objective Optimization Algorithms: A Comparative Study of MOGA-GWO, MOGA-CS, MOCS, and MOGA in the 4th Case Over 500 Iterations.
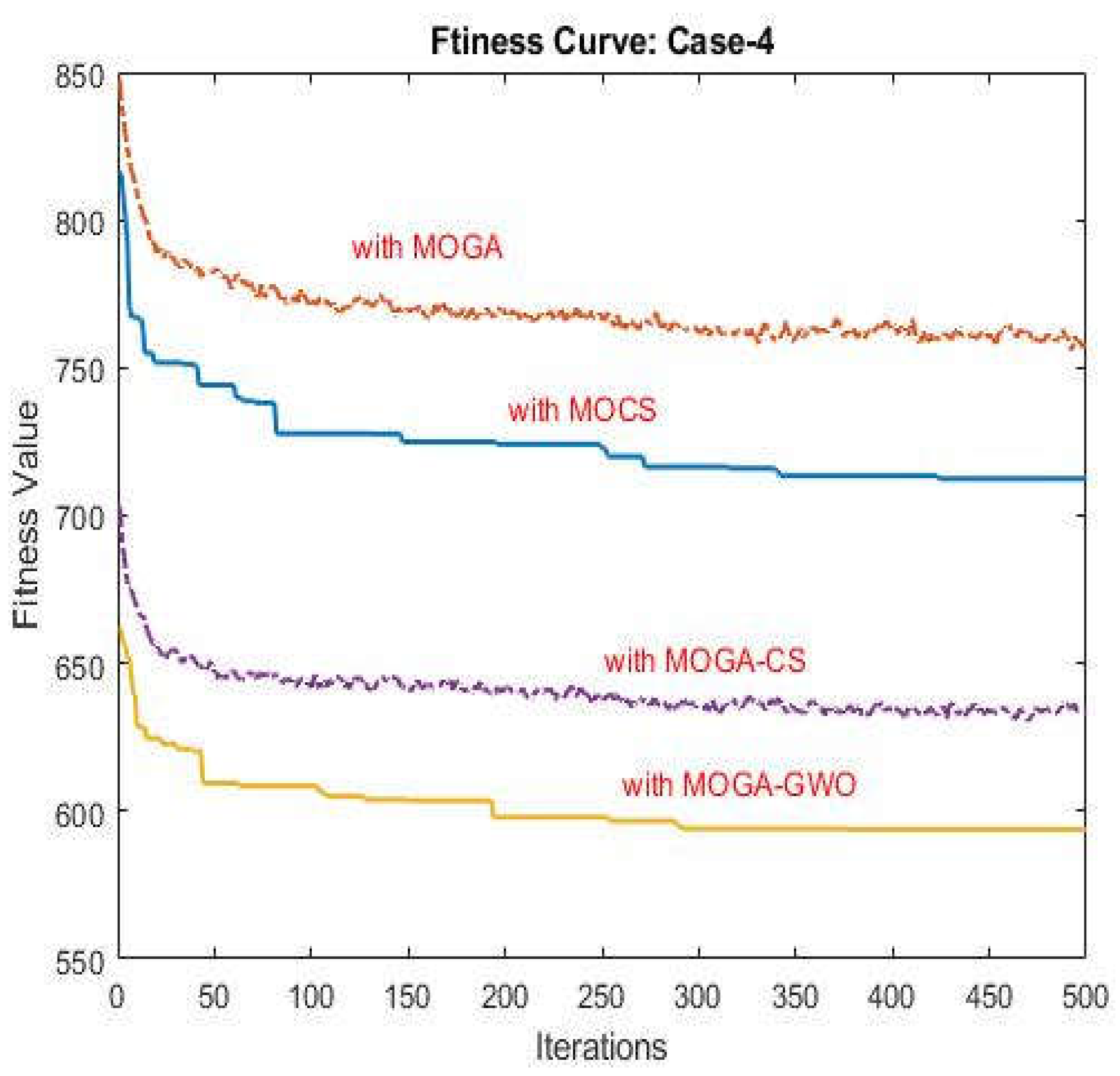

Table 2.
provides information on line data & load data.
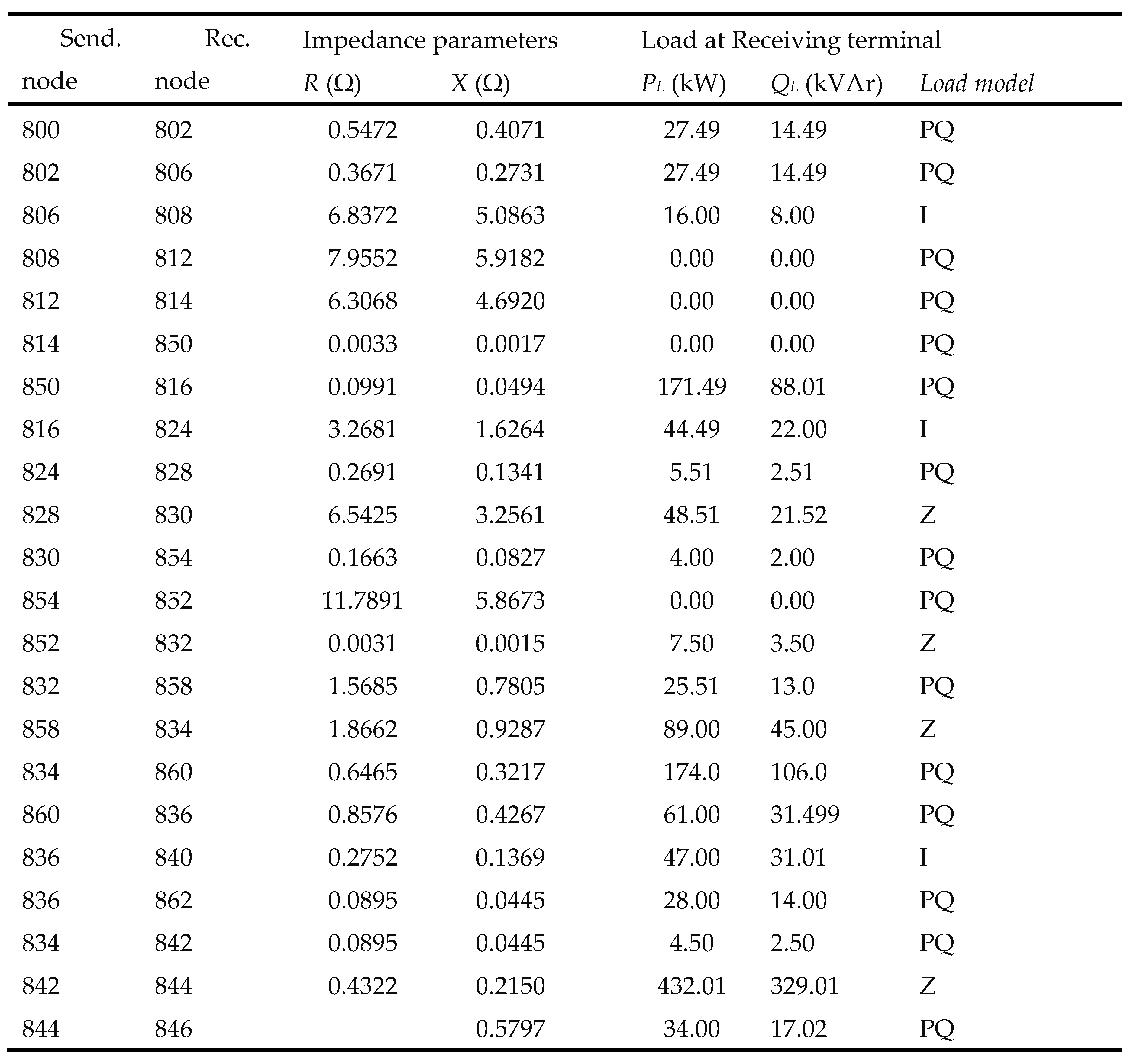

Table 3.
Data regarding the Distributed Generation (DG) units.
| Location | Type | Mode | PDgnom(kW) | QDG (kVAr) |
| 800 | Electric grid | Slack node | - | - |
| 812.5 | WT | PQ | 600 | cosφ=0.9 |
| 816.5 | MT | PQ | 300 | cosφ=0.9 |
| 848 | FC | PV | 300 | -0.888888889 |
| 854.5 | PV | PQ | 250 | cosφ=0.9 |
| 861.5 | DG | PQ | 369 | cosφ=0.9 |
Table 4.
Outlines the limits of the control variables in the modified IEEE 34-node test feeder.
| Control variables | Min | Max |
| Pfc (kW) | 0 | 300 |
| Pmt | 0 | 300 |
| Pdg | 0 | 369 |
| QC1(kVAr) | 0 | 300 |
| QC2(kVAr) | 0 | 300 |
| V800(p.u.) | 0.97 | 1.05 |
| V848(p.u.) | 0.98 | 1.05 |
| tVR1 (p.u.) | 0.9 | 1.1 |
| tVR2 (p.u.) | 0.9 | 1.1 |
Table 5.
Optimal settings of organized variables for a max & min load level.
| Max load (Time=14 hour) | Min load (Time=2 hour) | ||||||||
| Case 1 | Case 2 | Case 3 | Case 4 | Case 1 | Case 2 | Case 3 | Case 4 | ||
| Pmt (kW) | 310 | 310 | 310 | 293.2 | 0 | 0 | 0 | 0 | |
| Pfc (kW) | 261.19 | 291.81 | 300 | 220.7 | 207 | 221 | 201 | 221 | |
| Pdg (kW) | 297.2 | 370 | 369 | 368 | 54.49 | 135.09 | 39.798 | 121.09 | |
| V800 (p.u.) | 0.9996 | 1.05 | 1.0006 | 1.0114 | 0.9811 | 1.05 | 1.012 | 1.0017 | |
| V848 (p.u.) | 1.0497 | 1.0497 | 1.0036 | 0.9981 | 1.0194 | 0.9801 | 1.0049 | 1.0027 | |
| tVR1 (p.u.) | 0.9445 | 0.9889 | 0.9921 | 0.9651 | 0.9569 | 1.0909 | 0.992 | 0.9941 | |
| tVR2 (p.u.) | 0.9668 | 0.9866 | 0.9455 | 0.9529 | 1.029 | 0.9675 | 0.9912 | 0.9961 | |
| QC1 (kVAr) | 148.51 | 115.09 | 305 | 297 | 104.49 | 305 | 84.5 | 0 | |
| QC2 (kVAr) | 215.5 | 305 | 305 | 268 | 112.5 | 171.5 | 29.9 | 64 | |
| F. cost ($/h) | 178.35453 | 179.75784 | 179.65361 | 179.15631 | 55.54921 | 56.6276 | 56.24219 | 57.42896 | |
| Ploss (kW) | 76.359 | 64.349 | 68.89 | 79.15 | 13.575 | 9.2305 | 13.6689 | 9.6479 | |
| Vol. dev. (p.u.) | 0.72621 | 0.98021 | 0.49215 | 0.61904 | 0.46971 | 0.82321 | 0.09769 | 0.10267 | |
Table 6.
Mean and standard deviation results of the probabilistic OPF.
| Time=14 h | Time=8 h | Time=2 h | |||||||
| Case 1 | Case 4 | Case 1 | Case 4 | Case 1 | Case 4 | ||||
| µ | 296.5 | 289.9 | 272.36 | 244.69 | 58.69 | 38.69 | |||
| Pmt (kW) | σ | 4.1997 | 8.779 | 11.57 | 60.49 | 96.11 | 48.82 | ||
| µ | 250.349 | 240.015 | 209.29 | 184.57 | 199.72 | 183.91 | |||
| Pfc (kW) | σ | 19.923 | 17.793 | 20.47 | 47.76 | 16.05 | 20.73 | ||
| µ | 318.875 | 317.653 | 159.49 | 145.57 | 49.24 | 101.56 | |||
| Pdg (kW) | σ | 32.6 | 48.2 | 51.05 | 71.29 | 26.93 | 52.17 | ||
| µ | 1.0082 | 1.0034 | 1.0049 | 0.997 | 0.9941 | 0.9998 | |||
| V800 (p.u.) | σ | 0.027 | 0.0229 | 0.0179 | 0.0116 | 0.0133 | 0.0034 | ||
| µ | 1.0187 | 1.0074 | 1.0067 | 0.999 | 0.998 | 1.0047 | |||
| V848 (p.u.) | σ | 0.0167 | 0.0146 | 0.0164 | 0.0143 | 0.0037 | 0.0089 | ||
| µ | 0.9646 | 0.9622 | 0.9954 | 0.9676 | 1.0093 | 0.9979 | |||
| tVR1 (p.u.) | σ | 0.0274 | 0.0239 | 0.0278 | 0.0144 | 0.0113 | 0.00497 | ||
| µ | 0.9555 | 0.9544 | 0.9697 | 0.9781 | 0.9824 | 0.9953 | |||
| tVR2 (p.u.) | σ | 0.0151 | 0.0118 | 0.01951 | 0.0234 | 0.0117 | 0.0029 | ||
| µ | 197.7 | 231.6 | 216.2 | 196.4 | 247.49 | 178.75 | |||
| QC1 (kVAr) | σ | 81.36 | 20.26 | 33.29 | 30.91 | 53.13 | 70.29 | ||
| µ | 236.79 | 254.21 | 209.91 | 209.89 | 197.26 | 181.51 | |||
| QC2 (kVAr) | σ | 66.17 | 33.08 | 76.42 | 39.36 | 62.27 | 23.19 | ||
| µ | 178.9172 | 179.1982 | 111.9689 | 115.0571 | 55.4712 | 59.2727 | |||
| F. cost ($/h) | σ | 16.5973 | 17.1371 | 9.7496 | 10.6031 | 5.5934 | 5.5939 | ||
| µ | 77.69 | 79.198 | 38.11 | 45.43 | 13.59 | 17.49 | |||
| Ploss (kW) | σ | 9.39 | 10.297 | 4.11 | 12.71 | 2.612 | 4.179 | ||
| µ | 0.7305 | 0.6937 | 0.3606 | 0.329 | 0.556 | 0.0577 | |||
| Vol. dev. (p.u.) | σ | 0.1403 | 0.1372 | 0.0581 | 0.1151 | 0.0524 | 0.0076 | ||
Table 7.
Median & standard deviation results for dissimilar arrangements of the input random variables.
Table 7.
Median & standard deviation results for dissimilar arrangements of the input random variables.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



