
Submitted:
05 May 2024
Posted:
06 May 2024
You are already at the latest version
Abstract
The increasing concern regarding climate change continues to motivate research in the Arctic. Within the delicate cycle of the cryosphere, leads are an important kinematic feature that regulates heat balances and gaseous exchanges in the Arctic. Therefore, it is necessary to quantify the genesis of leads over time to identify when and where changes are occurring. The use of learning techniques is one such tool that is used to identify the characteristics of seasonal ice variability. This paper utilizes the Sentinel-1 RADAR imagery with a support vector machine learning scheme through Google Earth Engine to classify lead types in the Beaufort Sea.
Keywords:
sea ice
; cryosphere
; Arctic Ocean
; Beaufort Sea
; Leads
; Google Earth Engine
Introduction
Leads are linear kinematic features found on sea ice surfaces. The formation of leads is akin to the process of plate tectonics, where shifting ice sheets diverge, converge and slide against each other, forming fissures. Leads regulate heat flux during polar night-time in the Arctic and contribute to global climate from ice-atmospheric exchanges. Open water and newly frozen leads account for the first and second largest heat fluxes in the atmosphere (approximately 600 W.m-2 and 5 W.m-2 respectively in Figure 1), producing boundary layer clouds (Maykut 1982 and Li, 2019). Furthermore, leads are important to arctic habitats and wildlife (Stirling, 1997), gas exchange (Delille, 2014) and polar navigation (Lasserre, 2015).
Synthetic Aperture Radar (SAR) satellite imagery is used to observe and quantify the changes in lead fractions across the ice sheet. Radar data is particularly useful in quantifying lead fractions since the instrument makes observations in polar regions regardless of weather conditions or time of year (Lindsay and Rothrock, 1995), (Rohrs and Kaleschke, 2012; Brohan and Kalesche, 2014; Willmes and Heinemann, 2015). The Sentinel-1 A/B instrument is a powerful, high resolution radar satellite imager that has been making polar observations since its launch in 2014 and 2016 (A and B respectively). The two-satellite constellation provides a 6-day exact repeat cycle, 12-day cross-over and a repeat frequency of less than 1 day in the Arctic (Lohse, 2020). Sentinel-1 has an unprecedented nominal spatial resolution of ~40 m, which allows small scale leads on the ice surface to be expressed.
Google Earth Engine (GEE) hosts a large repository of satellite data, including the entire Sentinel catalog. GEE has been used in several research arenas, from vegetation and land use mapping (Tsai et al., 2018 and Gorelick et al., 2017) to wetland and snow melt detection (Liang et al., 2021; Gulacsi et al., 2020). Indeed, GEE and Sentinel-1 are proven powerhouses in the use of remote sensing techniques and climate observations in cloud computation environments. Our study focuses on the detection of leads in the Arctic using this platform which provides a solution to the common big data problem of data storage and computational power.
This paper provides a machine learning technique for sea ice classification in the GEE cloud computing environment using Sentinel-1 radar data. The Beaufort Gyre, once described as an ice production area has shown a decrease in ice productivity with increased wind forcing over the last decade (Armitage et al., 2020). This motivates our investigation of sea ice lead prevalence during the lifetime of the Sentinel-1 instrument. The aim of this study is to classify sea ice, open water, and thin ice leads in the offshore Alaskan region in the Beaufort Gyre to assess the changes in winter potential heat flux over the ice sheet. We employ the use of the sister satellite, Sentinel-2 multi-spectral instrument, as well as the IceSat-2 altimeter as validation and training sets in the classification scheme. From this, we quantify the change in sea ice lead dynamics in a time series format.
Study area
The region studied in the Arctic ocean is approximately 300 miles offshore Barrow, Alaska into the Beaufort Sea area. The Beaufort Sea is approximately 500,000 km2 in surface area and roughly located ~70° – 75° N and 120° –160 °W in the Arctic Ocean (Figure 2). The boundaries of the wedge-shaped geometry of the Beaufort Sea are flanked in the West by Point Barrow, in the east by Banks Island, and the lower Canadian Archipelago while fixed against the coast of the Alaskan and Canadian boundaries. The northern edge of the Beaufort Sea is a straight-line edge leading from Point Barrow to the Southern tip of Prince Patrick Island. This area was selected as an optimal lead energy flux area as described by Li et.al, (2019). According to the United States Census Bureau, this region is roughly 1,300 miles south of the North Pole and 320 miles north of the Arctic Circle, resulting in a cold and dry polar climate. Barrow itself, is a tundra environment characterized largely by permafrost that is proximately 1,300 feet in depth.
The upwelling of ocean currents allows heat, gas and moisture exchange fluxes between the ocean and atmosphere over the studied area. This is one of the influences of heat exchange by way of thermal ocean currents that cause temperatures in the Arctic to be generally warmer than those in the Antarctic (Talley et al., 2011). This unique dynamic is a point of interest for studying leads in the Arctic. Sea ice motion results from an average high-pressure system that creates winds over the region. The Beaufort Gyre acts as a basin in which sea ice forms and may circulate for several years (Talley et al., 2011). The circulatory movement and settlement of ice in this basin allows time for growth and reaching thermodynamic equilibrium thickness. Indeed, the oscillatory movement of ice in the Gyre causes collisions, tension and strike-slip motions of ice floes. The deformation of ice allows the fissuring of the ice surface as well as thick ridging of incident ice floes compared to other regions. The Gyre is also known to reverse its direction of movement (anti-clockwise) for short periods of time, lending itself to variations in the ice surface (Talley et al., 2011).
Ice created and consolidated in the Gyre is exported through the Transpolar Drift Stream out of the Arctic Basin through Fram Strait and into Northern Greenland and Canadian Archipelago coasts. North of Greenland and the Archipelago, the ice is compacted and deformed resulting in the thickest ice sections of the Arctic. The Beaufort Gyre is therefore an ice production zone in which new ice is churned and deposited into the larger Arctic ice cap. Variability in the cryosphere from atmospheric forcing, in tandem with the heat flux balance that open water and thin ice leads provide is therefore of interest for time series analysis.
Data and Methods
Sentinel-1: Data pre-processing
Google Earth Engine (GEE) was used for large data extraction and analysis. Sentinel datasets provided by the European Space Agency as shown in Figure 3 are made available through Google Earth Engine API. This study utilizes 410-km extra-wide (EW) swath radar (S1) products for sea ice feature extraction. Each image tile is approximately 1.3 GB in size with a 40 m pixel size. The Sentinel satellite utilizes two instruments S1A and S1B which have 6-day revisit cycles and a 12-day crossover (180 phase orbit difference).
The preprocessing of the radar data to ground range detection through GEE is done in a series of steps. The preprocessing includes the application of a restituted orbit file to update the orbit metadata in the Ground Range Detection (GRD) data. Next, a GRD border noise removal is done to minimize the noise associated with the striped data set. This is particularly useful for cross-polarized data (VH, HV) but is also necessary for dual-polarized data (HH, VV).
Thermal noise removal is the next noise reduction task to remove additive noise in sub-swaths and thus diminish discontinuities. This step is particularly necessary in the EW mode which has 5 sub-swaths. Radiometric calibration is then done to compute the backscatter intensity from the previously mentioned GRD metadata. Terrain correction (orthorectification) is done to convert the data from ground range geometry to Sigma-naught (σ0) and finally, an ellipsoid correction to orient the image in the stereographic North Pole.
The incident angle correction is also managed by the API through a gamma naught (Ƴ0) frequency and allows an uninhibited analysis from a graded image extent. This provides the first steps to a fully automated approach in classification strategy.
Sentinel-1: Image corrections and enhancement
Image corrections are integral to the classification process. Thermal noise and the scalloping effect are primarily apparent in the cross-polarized SAR image, and results from the incident angle of each sub-swath burst. The first sub-swath acquired is typically the brightest and causes a significant error in the final classification result. It is therefore important to minimize the noise in the cross-polarized image (HV-band) before proceeding with classification. The method of de-scalloping is described by (Li, 2020) and is further improved by (Wang and Li, 2020). The process requires segmenting the image into azimuthal blocks and introducing a variance factor to output accurate scaling and balancing factors. In addition to removing the residual noise, removing multiplicative noise at the sub-swath boundaries is done by downsampling and removing the first sub-swath. Figure 4 shows an example of the pre-processed and denoised HV-band. The denoised image is used alongside the co-polarized (HH-band) image with image enhancement techniques for sea ice lead detection.
GEE provides a preprocessing workflow to Sentinel SAR data. First a restituted orbit file is applied to update the near real-time orbit metadata in the Ground Range Detection (GRD) data. Next, a GRD border noise removal is done to minimize the noise associated with the striped data set. This is particularly important for cross-polarized data (VH, HV) but is also necessary for dual-polarized data (HH, VV). The removal of border noise minimizes classification errors by minimizing the abrupt change grading from one sub-swath to the next (Figure 4a, b).
Thermal noise removal is the next noise reduction task to remove additive noise in sub-swaths to diminish discontinuities. Radiometric calibration is then done to compute the backscatter intensity from the previously mentioned GRD metadata.
Thermal noise and the scalloping effect are primarily apparent in the cross-polarized SAR image, and results from the incident angle of each sub-swath burst. The first sub-swath acquired is typically the brightest and causes a significant error in the final classification result. It is therefore important to minimize the noise in the cross-polarized image (HV-band) before proceeding with classification. The process requires segmenting the image into azimuthal blocks and introducing a variance factor to output accurate scaling and balancing factors (Hird et al., 2017). In addition to removing the residual noise, removing multiplicative noise at the sub-swath boundaries is done by downsampling and removing the first sub-swath. Figure 4 shows an example of the pre-processed and denoised HV-band. The denoised image is used alongside the co-polarized (HH-band) image with image enhancement techniques for sea ice lead detection. Terrain correction (orthorectification) is done to convert the data from ground range geometry to Sigma-naught (σ0) and finally, an ellipsoid correction to orient the image in the stereographic North Pole. The incident angle correction is also managed by the API through a gamma naught (Ƴ0) frequency and allows an uninhibited analysis from a graded image extent. This provides the first steps to a fully automated approach in classification strategy.
After these steps, image enhancement techniques can be applied. To correctly identify lead areas in the image scenes, both polarizations are used to detect lead lines. Figure 5 illustrates the product, ratio and difference between the co- and cross-polarized bands (HH and HV bands respectively). The images show the different features that are enhanced in the SAR scene. While the product and ratio appear to enhance sea ice features on the small scale, the difference shows variants in the scene on a large scale. This may be particularly useful when discerning thick ice areas from thin ice leads. This is an additional correction step that is optional in application.
Sentinel-2: Optical image correction for class validation
Each Sentinel-2 satellite carries a Multi-Spectral Instrument (MSI) with 13 spectral channels at 10, 20 and 60 meter resolutions and a 290 kilometer field of view. The Sentinel-2 imager was launched one year after its SAR constellation (2015) and can provide a true-color composite of the image areas being studied in the radar scenes during polar daytime. S2-A and S2-B operate together to provide frequent revisits (10-days) and various view angles. The ESA provides two products for analysis: Level1-C and Level2-A which are top and bottom of atmosphere reflectance in cartographic geometry.
Figure 6 illustrates the Level2-A image collection as available through Google Earth Engine. Cloud masks are employed with the aforementioned image collections to minimize atmospheric influences in the study. Figure 6a shows an example comparing the image classification of sea ice in optical and SAR images using the support vector machine method and Figure 6b compares the false RGB SAR image and the final classified SAR image of the scene.
IceSat-2: Sea ice altimetry
IceSat-2 (Ice, Cloud and Land Elevation Satellite 2) is a satellite observing mission for measuring altimetric parameters including ice sheet elevation and sea ice thickness. IceSat-2 uses a photon counting lidar and ancillary systems to measure the time a photon takes to travel from the ATLAS instrument platform to Earth and return to derive its geodetic position. The instrument pulses energy at a 532 nm wavelength to mimic the frequency of the sun while featuring a narrowed receiver to minimize scattered retrieval signals. Figure 7 displays the laser pulses from the instrument illuminate three left and right pairs (L/R notation) of spots on the surface that trace ~17 m wide ground tracks during orbit in forward and reverse orientation. Each pair is roughly 90 m apart in the cross-track direction and 3.3 km in the along track direction. The ATL10 product estimates the sea ice freeboard. The sea ice freeboard is calculated in 10-km segments referenced from the ATL07 product where local sea surface references are available.
The ice thickness is derived from the ATL10 freeboard data as explained by Buckley and Petty (2020). We use the ATL10 data because of discrepancies in identifying “dark leads” in the ATL07 data. We average the data from the strong beams, since when compared to the weak beam pairs, more photons are returned to the sensor for improved accuracy of the freeboard readings. To calculate the ice thickness from the total freeboard, we apply the snow depth and density as described by the NSIDC (Buckley and Petty, 2020).
Lead detection algorithm
GEE is a JavaScript-Python platform that serves as a data repository, cloud computation and data storage point. The framework for lead detection in the Beaufort Sea requires a series of optimization techniques to identify and train data to detect ice surfaces. First, the Sentinel-1 data is filtered by the timeframes and polarizations (HH-HV) from 2016 to 2020. With the use of both polarization channels and their product, false RGB images are created to visually enhance features in our images. This allows the data to undergo its first round of training by visual inspection. This is achieved by labeling thick ice and open water leads since they are immediately discernible as bright (thick ice) or dark (open water and thin ice). However, open water can appear bright in SAR scenes, usually because of windy conditions. Therefore, we import the IceSat-2 ATL-10 data as a GEE asset and map the freeboard values with respect to our sea ice images. The total freeboard values as previously described are used to derive the ice thickness since thin ice is typically ~2 cm freeboard. From this, our classified ice thickness data is used to separate thin ice leads from other elongate/linear features in the scene (i.e., small and large-scale ridges).
We derive our texture analysis with the use of the co-polar HH-band, since it retrieves the highest power signal. It is also less inhibited by border noise than the cross-polar band (HV). A 7x7 gaussian window is applied to the co-polar scaled image which is analyzed with the use of the GEE built-in simple non-iterative clustering (SNIC) technique. We use the mean signal from the HH-band to extract our texture measures. The statistical measures applied to co-polarized data will outline the variance in the image set, encapsulating the class regions for each ice type. This measure of variance is our gray-level co-occurrence matrix from which our texture measures can be derived. Four texture measures including angular second moment (ASM) which have proven to work best in previous studies (Fauzi et al., 2020) are used to dictate our support vector machine classifier, and they are defined as follows:
This texture step is useful in our technique since thin ice surfaces display low roughness, while ridges exhibit high roughness resulting from the compression of incident ice margins.
We visually inspect and label our ice classes based on our texture features, as well as a Sentinel-2 RGB optical image as confirmation of the ice type flagging. Here, we select open water leads, thin ice leads, thin ice packs and thick ice packs as part of our sample region training. We separate objects by reclassing thin ice leads by elongated geometries, from thin ice packs as circular and/or non-elongated thin ice regions. The reclassification is to ensure that the algorithm differentiates between thin ice types of varied geometric shapes. This differentiation is useful in our technique since leads and ridges are spectrally and geometrically similar. However, the criterium utilizes roughness, ice thickness and shape to separate leads from ridges as well as thin ice leads from other thin ice types in the scene.
The raster scenes along track are converted to vector data. The conversion to vector data allows creation of an image collection for the daily classed regions which are next vectorized and explored as shapefiles to the cloud storage point. From data storage, the vector classes are imported to Google Collab to perform the time series analysis of the sea ice surface.
Validation of classified images
The classified Sentinel-1 image is cross-validated with the Sentinel-2 and IceSat-2 data shown in Figure 8 and Figure 9. The image times are published on April 29, 2020 with an approximate 3 and 4-hour delay respectively between the Sentinel-2 and Sentinel-1 images with the IceSat-2 track. The Sentinel-2 and Sentinel-1 images have a 7-hour delay between themselves. The track-line times and image positions show a drift to the right of both image tiles. Therefore, the overlapping regions of the altimetry and image data are offset by the ice drift during the images difference in time taken.
The IceSat-2 track shows agreement with the ice features and thickness information shown in the classified Sentinel-1 image as well as the Sentinel-2 optical image with time offset taken into account. Though the time difference offsets the ice type intersection, there is agreement between the change in thickness information with latitude and the change in ice features displayed in the true color image and classified images. The distribution of ice thickness values that coincide with the ice classification as well as the optical image, confirms the robustness of the classification technique applied.
Comparison of lead detection through relative orientations
To validate our lead detecting method, we compare the lead detection method forwarded by Murashkin and Spreen (MS) with our method (JWGEE). To compare this, we extract an area of interest in which both methods show “leads”. The MS method utilizes a Hough transform which captures line segments of any type in an image. Figure 10 illustrates the relative orientation of leads on March 2nd and 11th, 2020.
There is a greater variation in the orientation of the leads in MS compared to our method. This may result from their algorithm detecting all lenticular objects in the scene, rather than just leads. In addition to this, the MS method employs a line reconnection step that we do not apply. Indeed, the connection of two or more adjacent lines will produce a resultant lead which varies from the two original “lead” segments. While this step is useful in accounting for leads that have been displaced by secondary movement in the ice sheet after the opening of the lead, the Hough transform may include line segments that belong to ridges rather than leads. Nevertheless, Figure 11 shows that the central distributions in both methods are similar, suggesting congruence among the algorithms. The central distributions show an approximate 20-degree difference suggesting lead orientations from an east to east-south-easterly direction.
While there is less variation in our lead detection method, we agree on the central distribution pattern of lead orientation. We also show mean orientation angles within 20-degrees of each other. The lead orientation describes a general east-west movement of ice moving from the polynya (open water) ice production zone into the geometric edge coastline of Northern Alaska and the Canadian archipelago. The clockwise movement of the Gyre itself is demonstrated here with the prevailing movement of new ice into an ice deformation drag zone.
Results and Discussion
Lead fractions
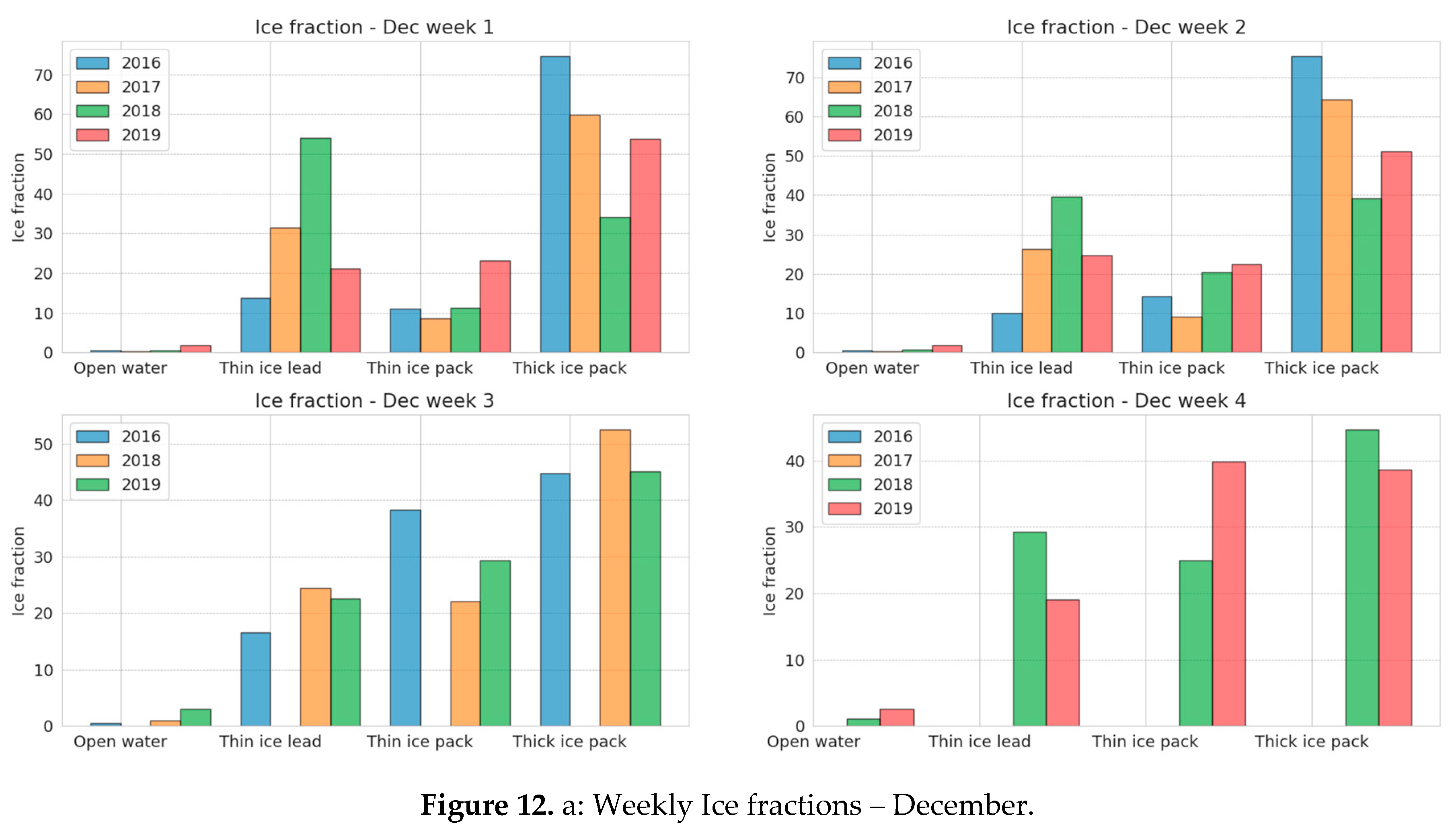
The result of the study provides us with lead maps for winter periods between 2016-2019. Figure 12 shows the sea ice fractions for each winter period. The onset freezing period begins in December in the Arctic. During this time, ice production increases and new ice cover dominates the scene. It is important to note that for the lifetime of the Sentinel-1 constellation, the figures show a reduction in available data closer to the instruments’ inception. This is possibly due to calibration and/or maintenance protocols. Alternatively, GEE may not include all the data provided by ESA because of additional corrections employed with older datasets.
For the month of December and all subsequent months during the winter, the thick ice pack accounts for most of the ice fraction. This finding suggests that the new ice is allowed to grow and consolidate, establishing thick ice and maintaining the ice concentration in the Arctic. However, there is a general reduction in the thick ice cover in later years, especially when compared to the fractions displayed for 2016.
The ice fractions in December entering the winter period, illustrate that the scene is dominated by thick ice cover. However, in the years 2017-2018, this changes considerably with thinner ice types accounting for most of the ice cover. As freezing accelerates into January, the thick ice cover re-establishes itself as the dominant ice type. Nevertheless, thin ice coverage has increased, and the ratio of thick to thin ice becomes more equivalent.
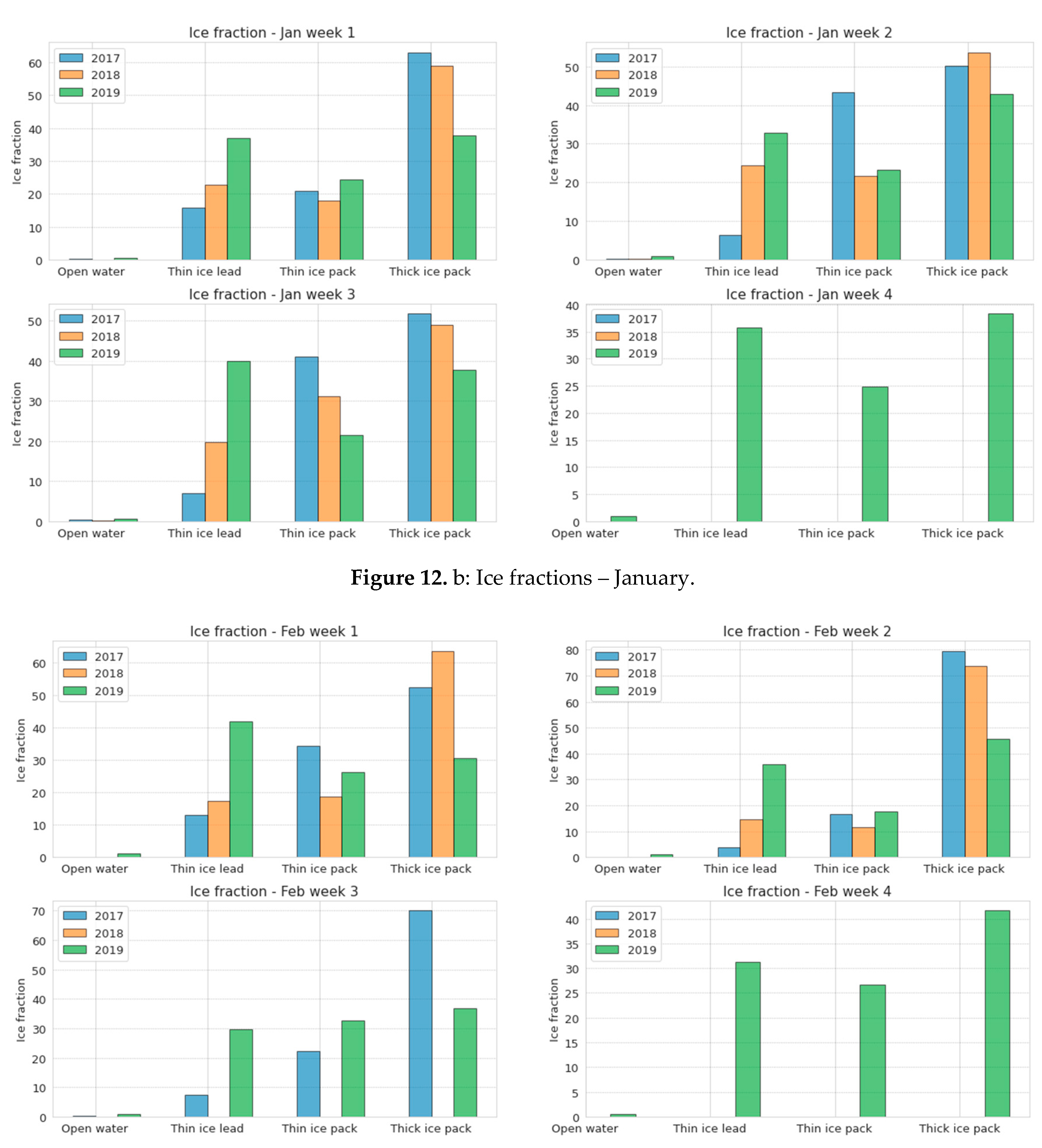
However, the thick ice cover in December 2019 is not the dominant ice cover in the scene. Thick ice and thin ice types are almost equivalent with thick ice approximating 50% of ice coverage. Indeed, by the third week of December, the thin ice coverage has exceeded the total area covered by the thick ice. In January 2019, the thick ice is no longer the larger share of the ice cover. In fact, thin ice leads and consolidated ice (inclusive of pancakes, mushy ice, grease ice etc.) collectively account for at least twice the share of thick ice coverage.
The freezing maximum is marked generally by the beginning of February based on our histograms. In the years 2017 and 2018, we observe the largest share of ice coverage in the thick ice pack, with fluctuations in the absolute ice fractions from week to week. While the ice fractions were unavailable in the third week for February 2018, we observe that the total thick ice coverage (70%) is roughly twice the total thin ice cover (31%) in February 2017. In contrast with 2017, the ice fractions in February 2019 recorded a thin ice dominated scene in which thick ice did not exceed 45%.
The reversal of a thick ice dominated fraction to a thin ice dominated fraction in early 2019 is a change from earlier behavior, since the Beaufort Gyre is considered an ice factory for the larger reserve of ice concentration in the Arctic. While new ice is being constantly created, the rate of congelation of ice appears to have slowed down considerably, reducing the thick ice available for further consolidation.
The figures suggest that while the Gyre has typically maintained a cyclical pattern of new ice production, thick ice usually accounts for the largest portion of ice fractions. However, there is an anomalous reduction in thick ice, accompanied by a larger share of thin ice cover in December 2017 which the Gyre appeared to be unable to recover from. The year 2017 was recorded as the third warmest year by The National Oceanic and Atmospheric Administration (NOAA National Centers for Environmental Information, 2018) and is a novel display of the sensitivity of the cryosphere to atmospheric forcing. Climate feedbacks describe a sensitive balance between ice and atmospheric exchanges.
Positive feedbacks in climate can cause a net warming effect while negative feedback provide a net cooling effect. In the cryosphere, this is due to the high albedo rate of the white ice surface, which at its maximum reflects almost all incoming solar insolation. In contrast, a reduction in the ice surface enhances the absorption of heat energy, increasing temperatures and reducing potential ice cover. The reduction in ice coverage from increased temperatures in 2017 may have a long-term effect on the Arctic’s ability to establish thick, multi-year ice coverage. Climate feedbacks in the Arctic are clearly influential in the balance of ice coverage in the cryosphere, as one year of marked heating has shown a diminished coverage of relative thick ice to thin ice ratio. Though some recovery is seen in thick ice between the years 2018 to 2019, the relative change from a thick to thin ice dominated scene is maintained. This is particularly concerning for the future of Arctic ice cover as global temperatures continue to rise.
Code Availability: The code used in this work is found at https://github.com/jcbw/Arctic_Lead_Detection.
Author Contributions
JW was the primary producer of the study, processed and analyzed all the data. SFA, AMM-N and GM all contributed to the design and discussed the results of the study. All authors contributed to the editing of the manuscript.
Financial support: This work was funded by NASA CAMEE grant#: 80NSSC19M0194.
Acknowledgments
We’d like to thank NASA CAMEE grant#: 80NSSC19M0194 for funding this research. Thanks as well to the Google Earth Engine and its affiliate platforms for allowing cloud computation of data and analysis. Thanks to the University of Bremen and NSIDC for hosting research data for analysis. We’d also like to thank the European Space Agency (ESA) for hosting and allowing API access to Sentinel-1 & 2 data to support our findings as well as Earthdata for hosting IceSAT-2 data. Many thanks to the ArcGIS Pro, StackExchange and StackOverflow communities for aiding coding research. Finally, thank you to the University of Washington for continuously hosting the IceSAT-2 and Snowex hackweeks to assist cloud coding of the work published here.
Competing interests: The authors declare no competing interest.
References
- Armitage, T. , Manucharyan, G., Petty, A., Kwok, R., & Thompson, A. (2020). Enhanced eddy activity in the Beaufort Gyre in response to sea ice loss. Nature Communications, 11(1). [CrossRef]
- Arendt, A. , Scheick, J., Shean, D., Buckley, E., Grigsby, S., Haley, C., Heagy, L., Mohajerani, Y., Neumann, T., Nilsson, J., Markus, T., Paolo, F. S., Perez, F., Petty, A., Schweiger, A., Smith, B., Steiker, A., Alvis, S., Henderson, S., Holschuh, N., Liu, Z., Sutterly, T. (2020). 2020 ICESat-2 Hackweek Tutorials (1.0.0). Zenodo. [CrossRef]
- Gorelick, N. , Hancher, M., Dixon, M., Ilyushchenko, S., Thau, D., & Moore, R. (2017). Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sensing Of Environment, 202, 18-27. [CrossRef]
- Gulácsi, A., & Kovács, F. (2020). Sentinel-1-Imagery-Based High-Resolution Water Cover Detection on Wetlands, Aided by Google Earth Engine. Remote Sensing, 12(10), 1614. [CrossRef]
- Hird, J.N.; DeLancey, E.R.; McDermid, G.J.; Kariyeva, J. Google Earth Engine, open-access satellite data, and machine learning in support of large-area probabilistic wetland mapping. Remote sensing 2017, 9, 1315. [Google Scholar] [CrossRef]
- Hutter, N., Zampieri, L., & Losch, M. (2018). Leads and ridges in Arctic sea ice from RGPS data and a new tracking algorithm. The Cryosphere Discussions, 1-27. [CrossRef]
- Li, X., Krueger, S., Strong, C., & Mace, J. (2019). Effects of Midwinter Arctic Lead on Boundary Layer Clouds. Presentation.
- Liang, D., Guo, H., Zhang, L., Cheng, Y., Zhu, Q., & Liu, X. (2021). Time-series snowmelt detection over the Antarctic using Sentinel-1 SAR images on Google Earth Engine. Remote Sensing Of Environment, 256, 112318. [CrossRef]
- Lindsay, R., & Rothrock, D. (1995). Arctic sea ice leads from advanced very high resolution radiometer images. Journal of Geophysical Research, 100(C3), 4533. [CrossRef]
- Lohse, J., Doulgeris, A., & Dierking, W. (2019). An Optimal Decision-Tree Design Strategy and Its Application to Sea Ice Classification from SAR Imagery. Remote Sensing, 11(13), 1574. [CrossRef]
- Miao, X.; Xie, H.; Ackley, S.F.; Zheng, S. Object-based arctic sea ice ridge detection from high-spatial-resolution imagery. IEEE Geoscience and Remote Sensing Letters 2016, 13, 787–791. [Google Scholar] [CrossRef]
- NOAA National Centers for Environmental Information, State of the Climate: Monthly Global Climate Report for Annual 2018, published online 19, retrieved on July 16, 2021 from https://www.ncei.noaa.gov/access/monitoring/monthly-report/global/201813. 20 January.
- Piwowar, J., & LeDrew, E. (1996). Principal Components Analysis of Arctic Ice Conditions between 1978 and 1987 as Observed from the SMMR Data Record. Canadian Journal Of Remote Sensing, 22(4), 390-403. [CrossRef]
- Röhrs, J., & Kaleschke, L. (2012). An algorithm to detect sea ice leads by using AMSR-E passive microwave imagery. The Cryosphere, 6(2), 343-352. [CrossRef]
- Smith, B., Fricker, H. A., Holschuh, N., Gardner, A. S., Adusumilli, S., Brunt, K. M., ... & Siegfried, M. R. Land ice height-retrieval algorithm for NASA's ICESat-2 photon-counting laser altimeter. Remote Sensing of Environment 2019, 233, 111352. 2019, 233, 111352. [CrossRef]
- Stirling, I. (1997). The importance of polynyas, ice edges, and leads to marine mammals and birds. Journal Of Marine Systems, 10(1-4), 9-21. [CrossRef]
- Tsai, Y., Stow, D., Chen, H., Lewison, R., An, L., & Shi, L. (2018). Mapping Vegetation and Land Use Types in Fanjingshan National Nature Reserve Using Google Earth Engine. Remote Sensing, 10(6), 927. [CrossRef]
- Wang, Y.R.; Li, X.M. Arctic sea ice cover data from spaceborne SAR by deep learning. Earth Syst. Sci. Data Discuss 2020, 2020, 1–30. [Google Scholar]
- Willmes, S. & Heinemann, G. (2015). Sea-Ice Wintertime Lead Frequencies and Regional Characteristics in the Arctic, 2003–2015. Remote Sensing, 8(1), 4. [CrossRef]
Figure 1.
Heat flux estimates from midwinter Arctic leads form and dissipate low clouds in Li, et al. (2019).
Figure 1.
Heat flux estimates from midwinter Arctic leads form and dissipate low clouds in Li, et al. (2019).
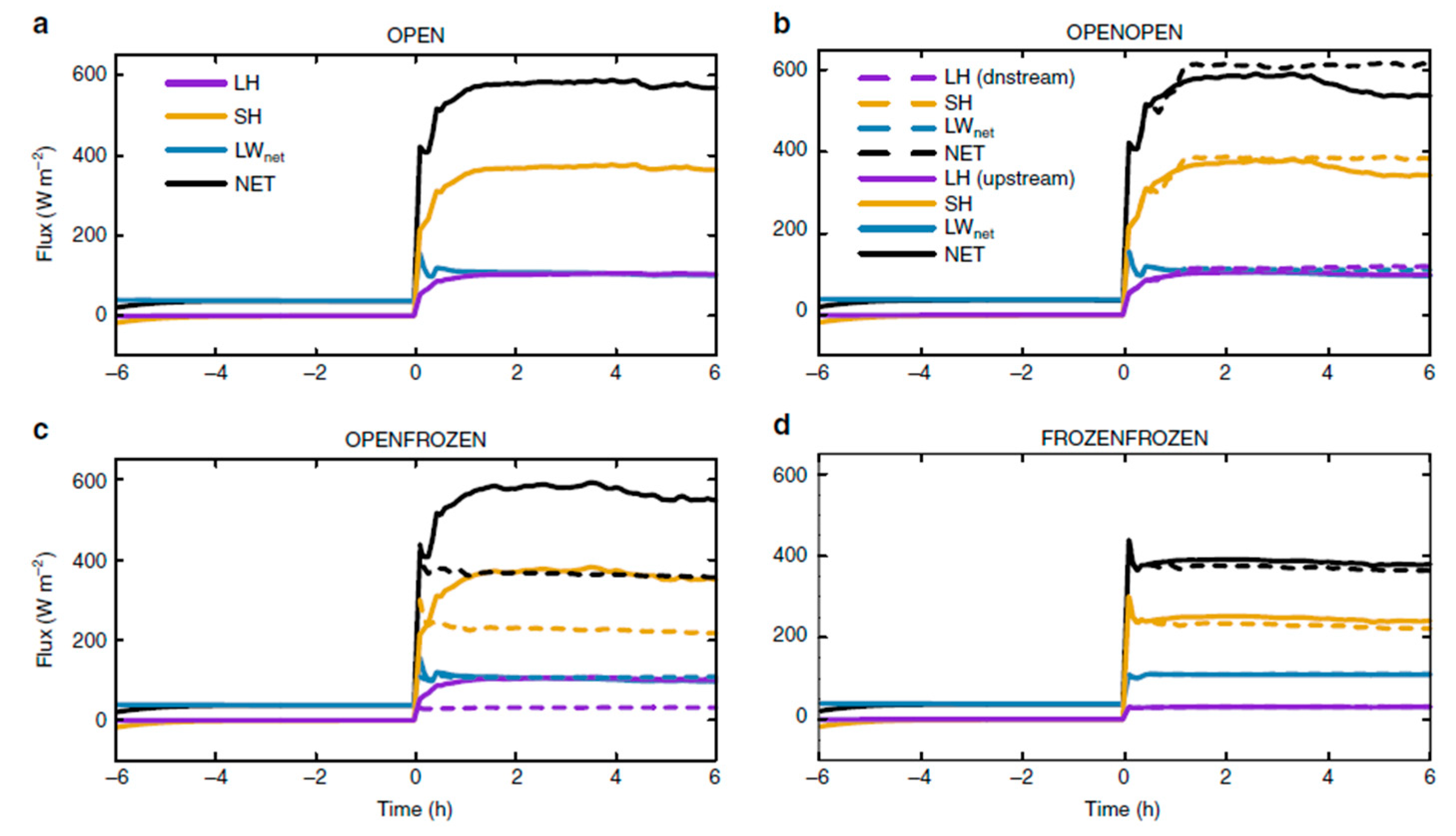
Figure 2.
Lead study area offshore Barrow, Alaska. The Beaufort Sea is highlighted in blue just north of Point Barrow in the north-western segment of the map.
Figure 2.
Lead study area offshore Barrow, Alaska. The Beaufort Sea is highlighted in blue just north of Point Barrow in the north-western segment of the map.
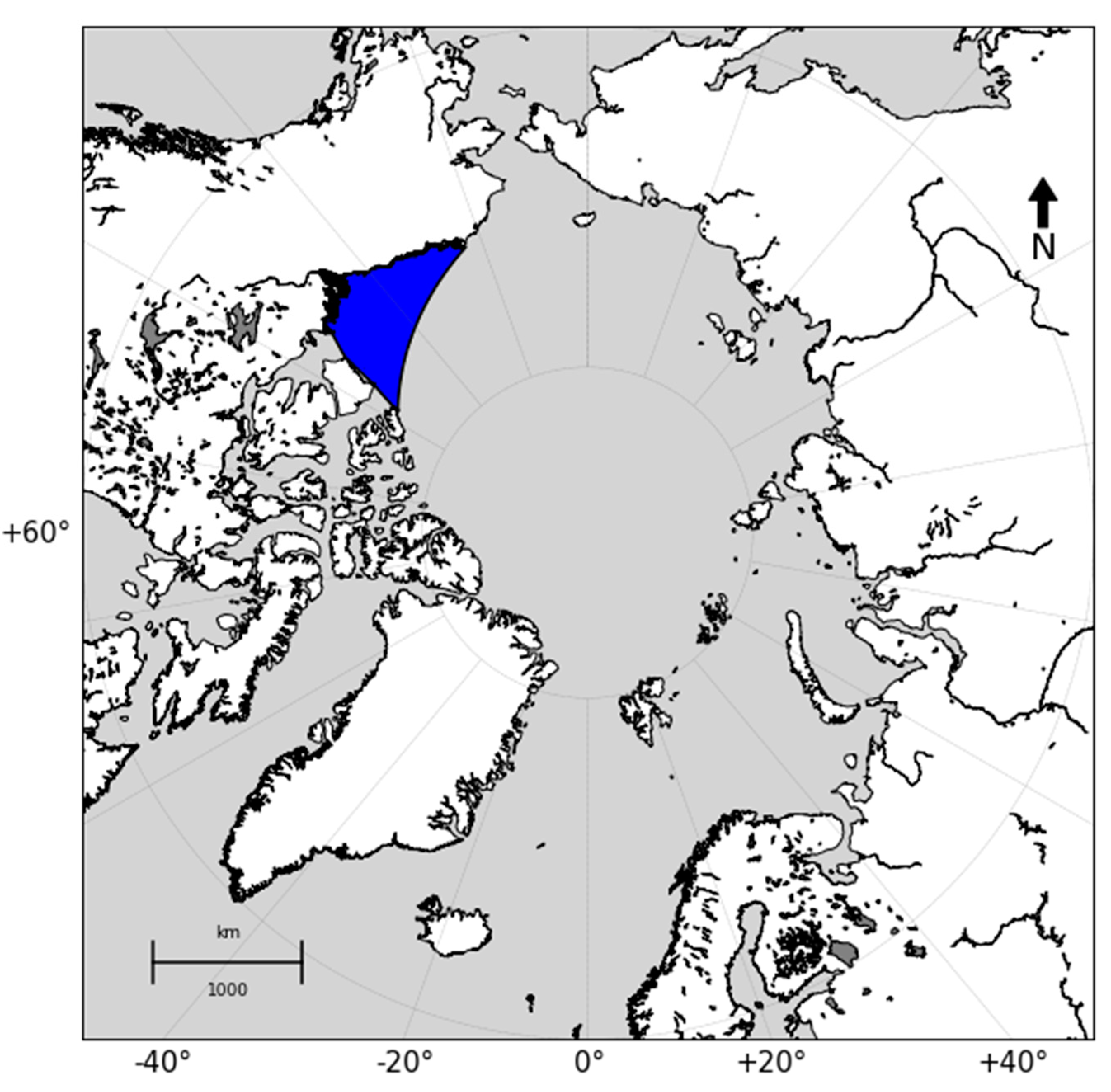
Figure 3.
Sentinel products and coverage adapted from the European Space Agency (ESA).

Figure 4.
b: Cross-polar band correction in Google Earth Engine.
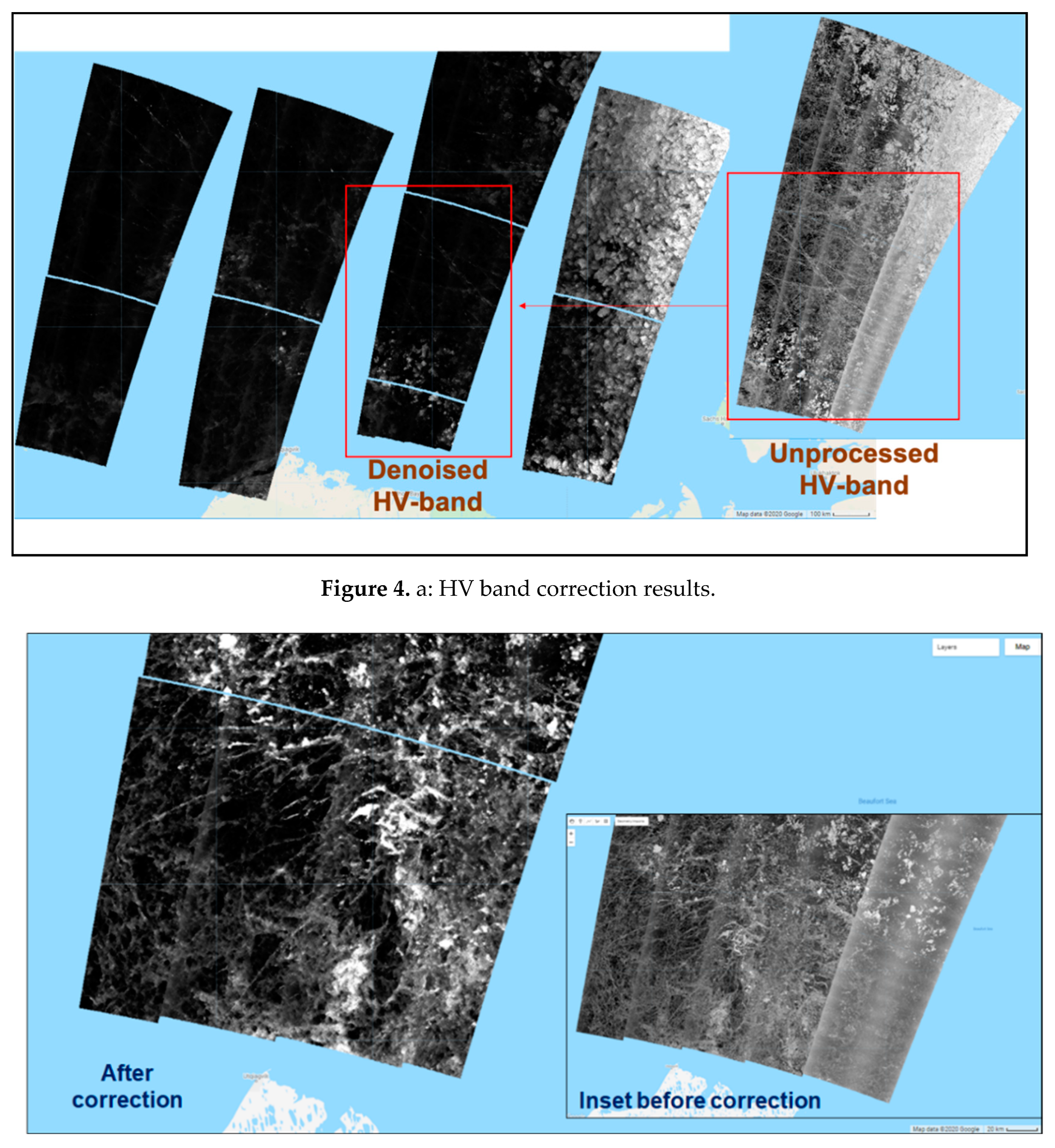
Figure 5.
Co-and Cross polar band (A) product, (B) ratio and (C) difference.
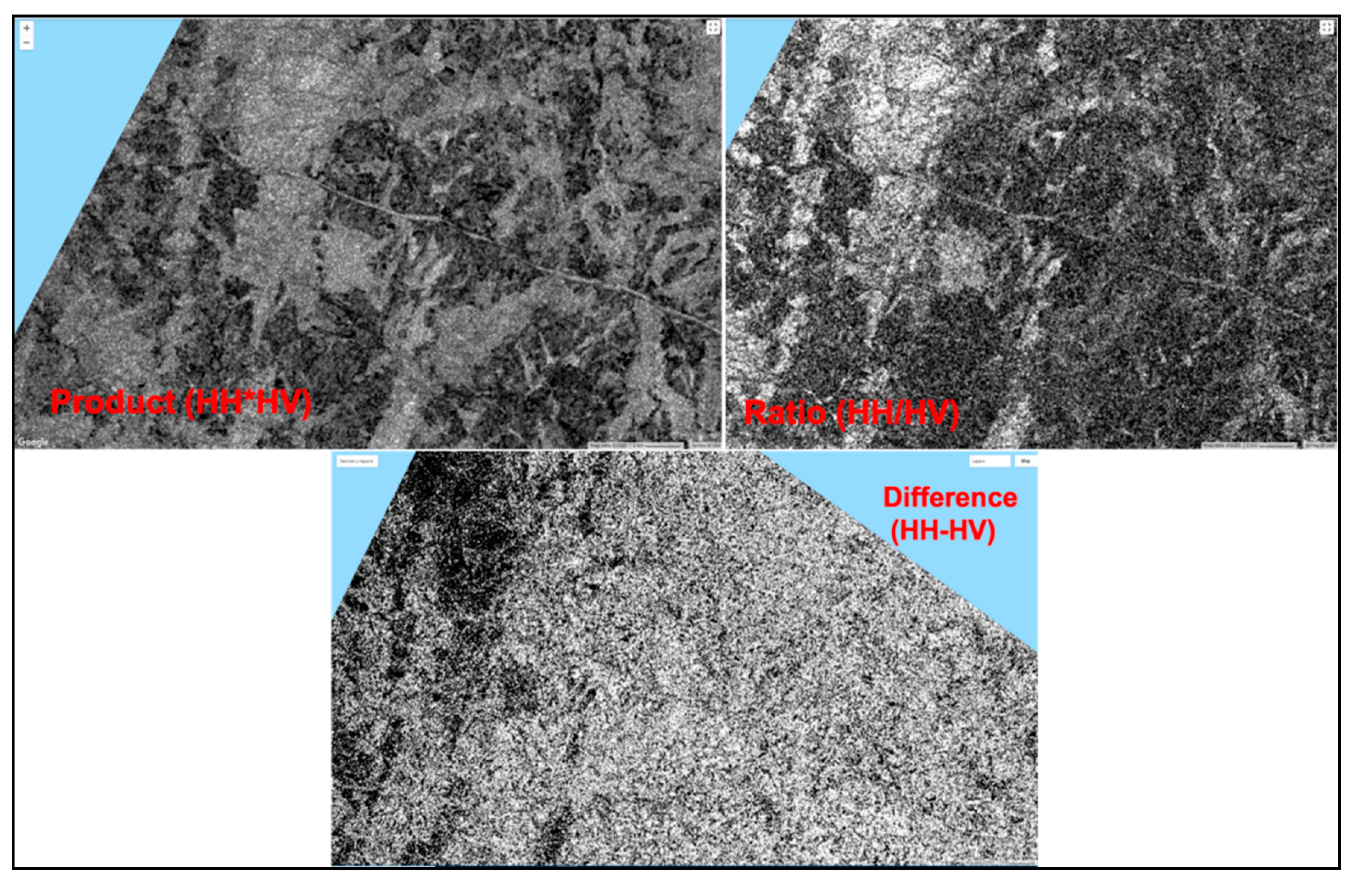
Figure 6.
b: Sea ice scene in the Beaufort Gyre with (a) False RGB Sentinel-1 image and (b) Classified image where red – open water, white – thin ice lead, blue – thick ice pack, purple – thin ice pack. (Image date: February 11th, 2019).
Figure 6.
b: Sea ice scene in the Beaufort Gyre with (a) False RGB Sentinel-1 image and (b) Classified image where red – open water, white – thin ice lead, blue – thick ice pack, purple – thin ice pack. (Image date: February 11th, 2019).
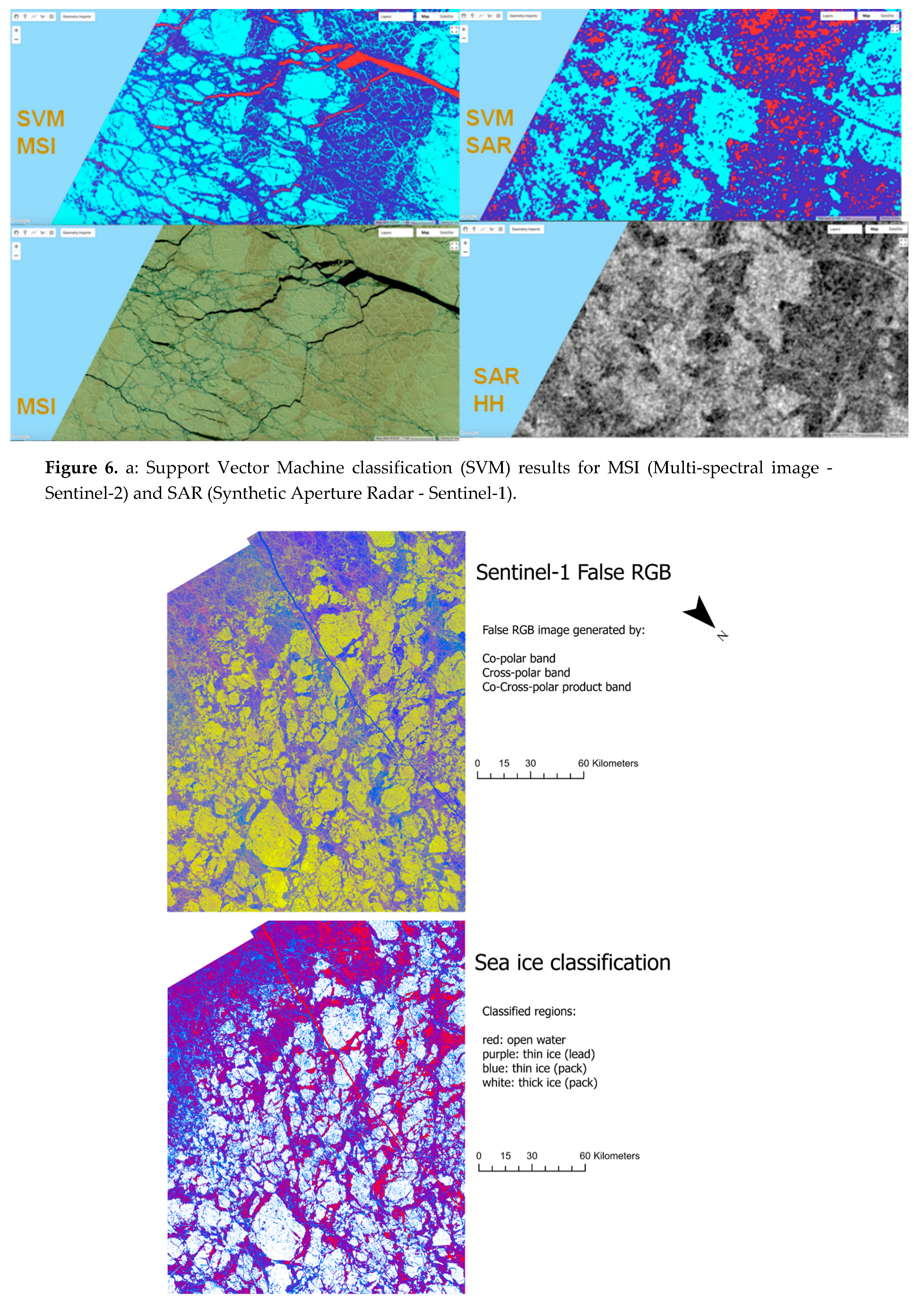
Figure 7.
IceSat-2 photon altimetry schematic.
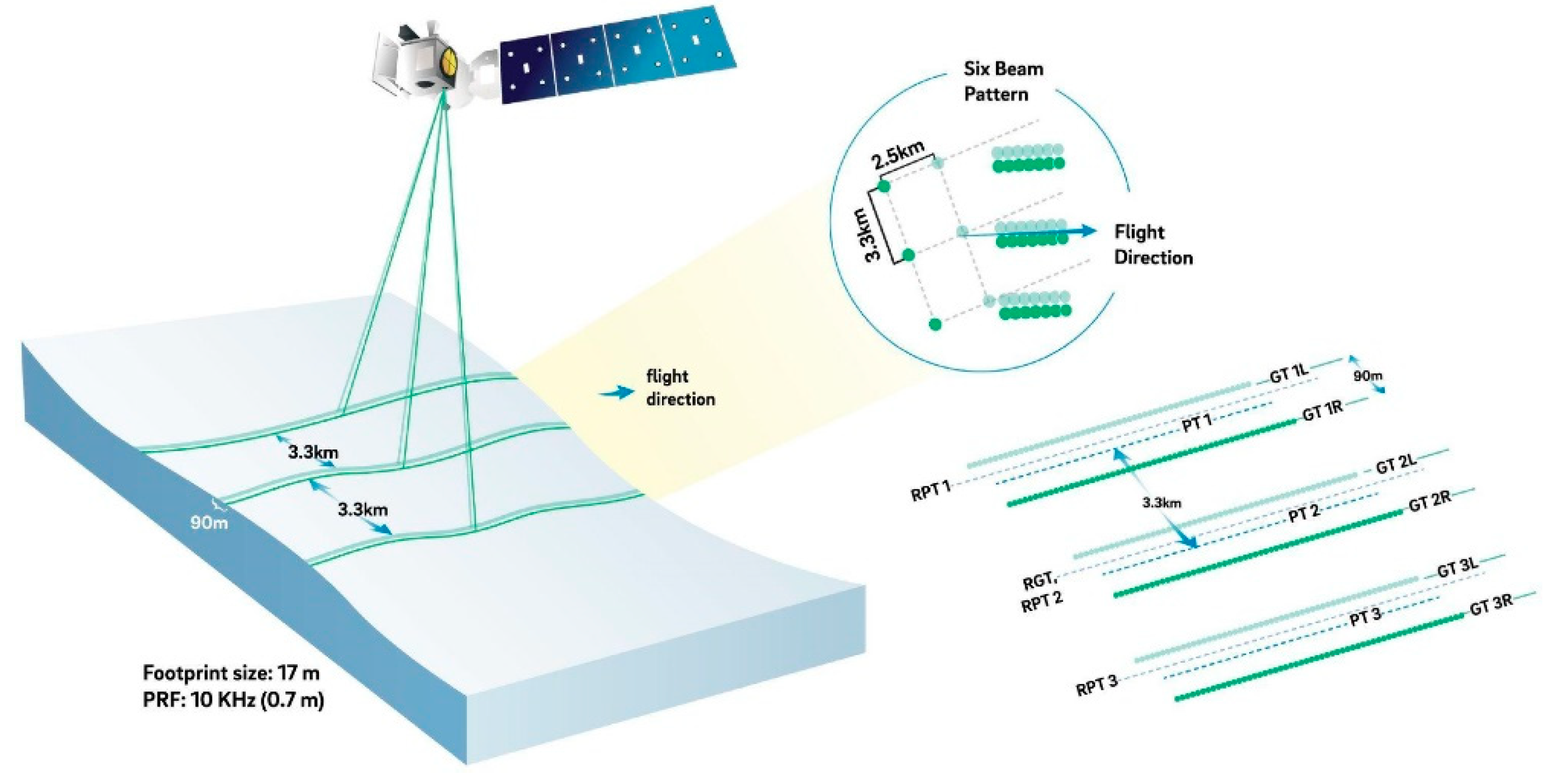
Figure 8.
IceSAT-2 and Sentinel-1 classified image overlap. The dotted line is the IceSAT-2 data (thickness) and the Sentinel-1 data is the background image. The change in the thickness increases in the same regions where the thick ice type occurs. There is an offset between the datasets because of the time gap between the data acquisition times (approximately 4 hours). .
Figure 8.
IceSAT-2 and Sentinel-1 classified image overlap. The dotted line is the IceSAT-2 data (thickness) and the Sentinel-1 data is the background image. The change in the thickness increases in the same regions where the thick ice type occurs. There is an offset between the datasets because of the time gap between the data acquisition times (approximately 4 hours). .
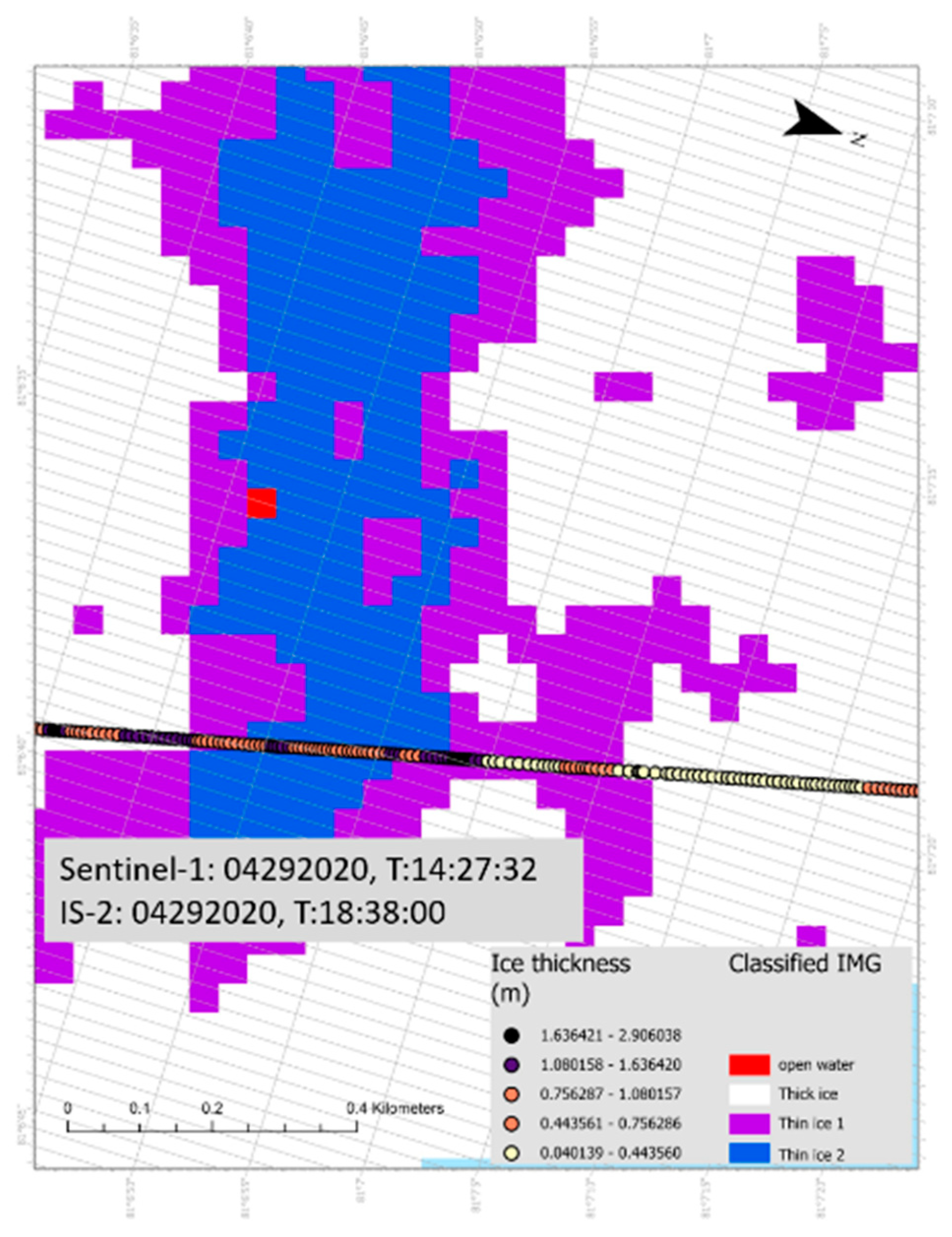
Figure 9.
IceSAT-2 and Sentinel-2 image overlap with the thickness data (colored, dotted line) and True color image (background). The figure shows the corresponding change in thickness with ‘ground-truth’ image. The offset acquisition time between datasets is approximately 3 hours.
Figure 9.
IceSAT-2 and Sentinel-2 image overlap with the thickness data (colored, dotted line) and True color image (background). The figure shows the corresponding change in thickness with ‘ground-truth’ image. The offset acquisition time between datasets is approximately 3 hours.
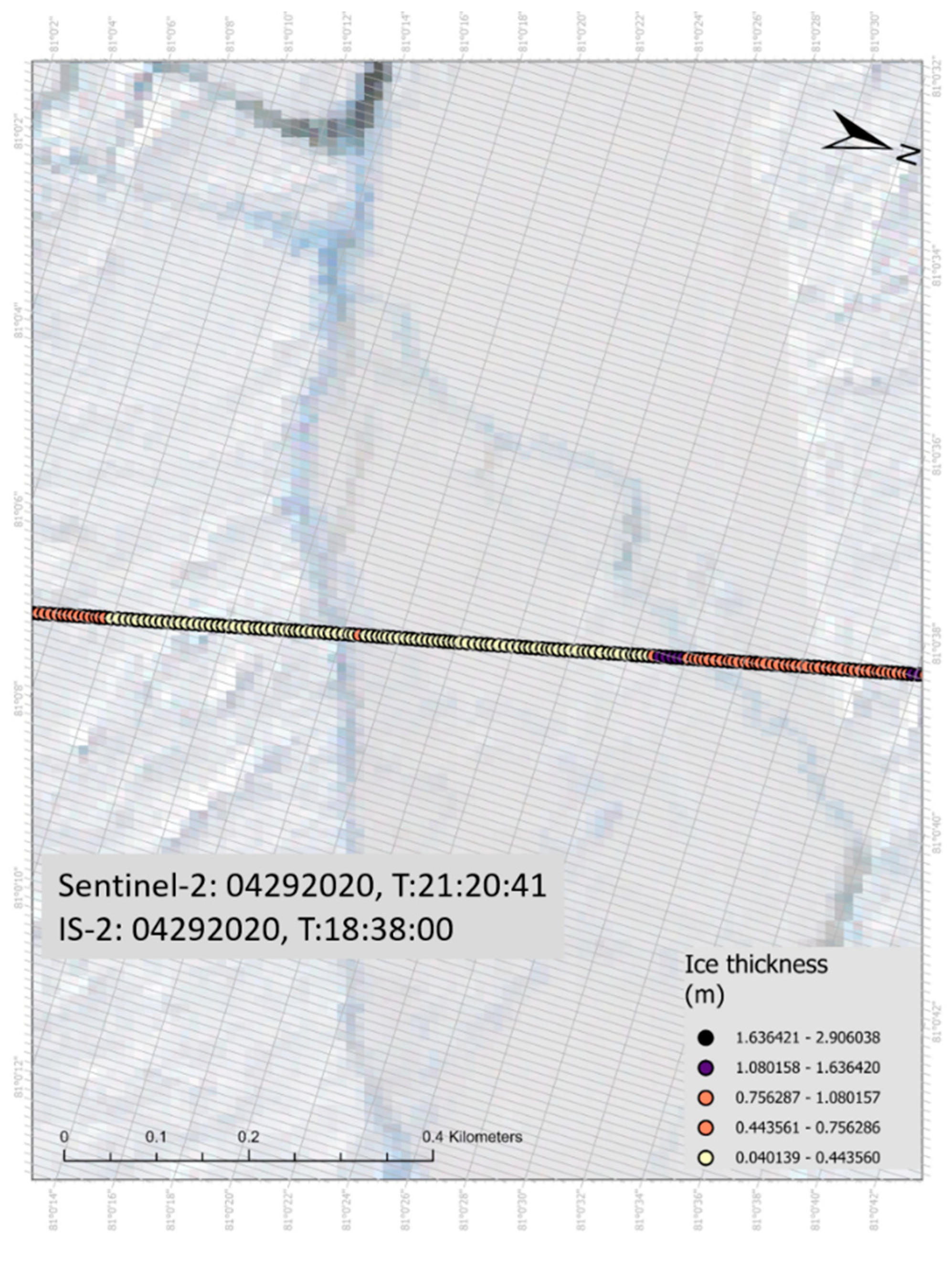
Figure 10.
Murashkin and Spreen lead orientations on March 2nd (A) and 11th (B) and our method for the same days in (C) and (D) respectively. Both studies capture approximately 80 lead-type features in the region of interest.
Figure 10.
Murashkin and Spreen lead orientations on March 2nd (A) and 11th (B) and our method for the same days in (C) and (D) respectively. Both studies capture approximately 80 lead-type features in the region of interest.
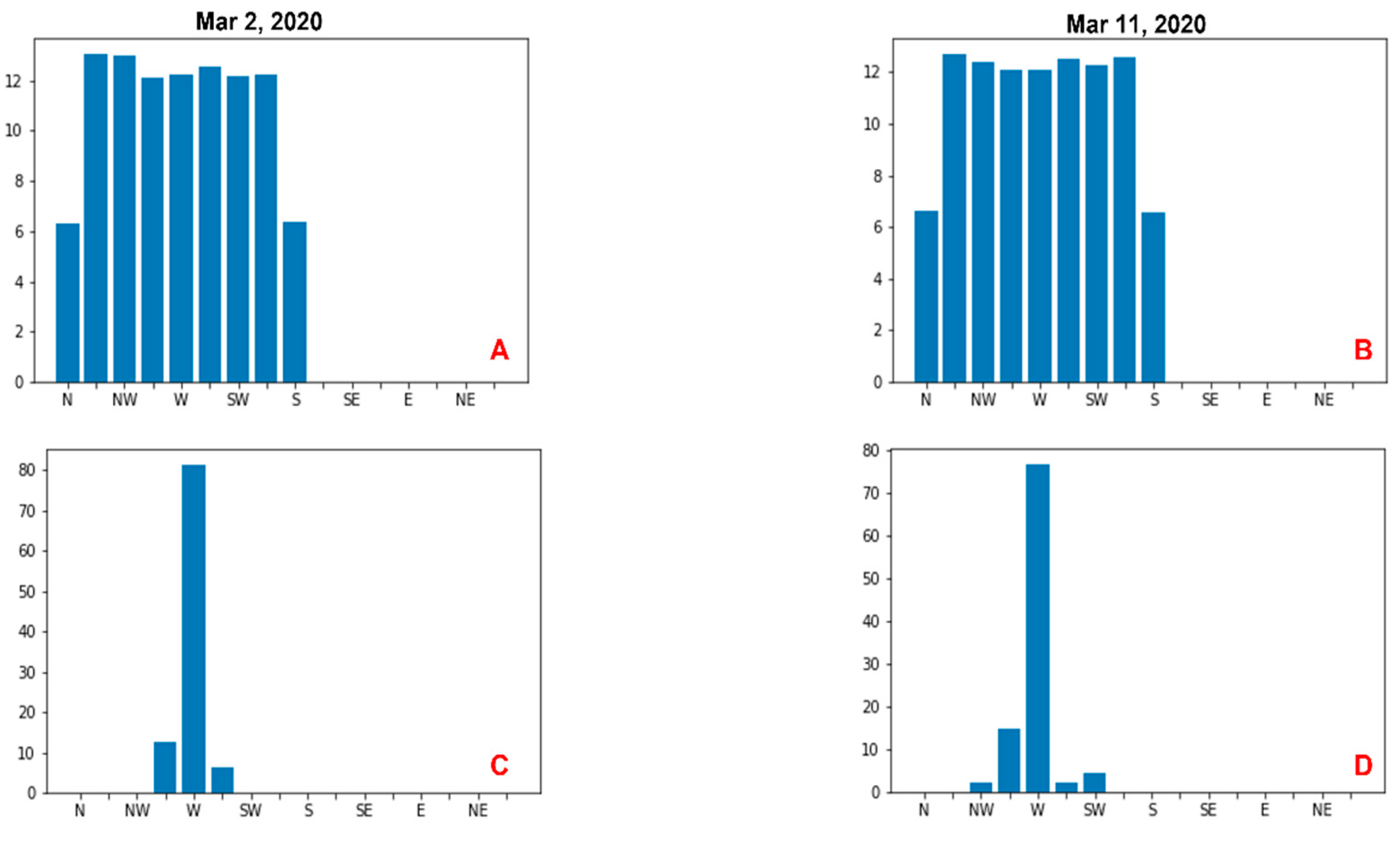
Figure 11.
Murashkin and Spreen (left) and GEE derived mean orientation angles (right).

Figure 12.
c: Ice fractions – February.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



