
Submitted:
06 May 2024
Posted:
14 May 2024
You are already at the latest version
Abstract
A one-dimensional model for fluid and solute transport in poroelastic materials (PEM) is studied. Although the model was recently derived and some exact solutions, in particular steady-state solutions and their applications, were studied, special cases occurring when some parameters vanish were not analysed earlier. Since the governing equations are nonintegrable in nonstationary case, the Lie symmetry method and modern tools for solving ODE systems are applied in order to construct time-dependent exact solutions. Depending on parameters arising in the governing equations, several special cases with new Lie symmetries are identified. Some of them have a highly nontrivial structure that cannot be predicted from a physical point of view or using Lie symmetries of other real-world models. Applying the symmetries obtained, multiparameter families of exact solutions are constructed, including those in terms of elementary and special functions (hypergeometric, Whittaker, Bessel and modified Bessel functions). A possible application of the solutions obtained is demonstrated and it is shown that some exact solutions can describe (at least qualitatively) the solute transport in PEM. The obtained exact solutions can also be used as test problems for estimating the accuracy of approximate analytical and numerical methods for solving relevant boundary value problems.
Keywords:
poroelastic material
; nonlinear differential equation
; Lie symmetry
; exact solution
MSC: 35B06; 35C05; 74L15
1. Introduction
The poroelastic theory considers the system formed by an elastic material with pores that can be penetrated by a fluid and/or dissolved solutes. A typical biological example is the glucose solute penetrating a tissue layer. The basic theory of poroelasticity was developed by Biot [1] and its state-of-the-art can be found in the well-known books [1,2,3] (see also recent studies, e.g., [4,5,6,7,8]). A poroelastic material is considered as the superposition of two continuous media: the matrix (skeleton), occupying the fractional volume , and the system of pores saturated by a fluid, occupying the fractional volume ). The deformation of the system under the fluid pressure is described by a deformation vector, and the dynamics of the deformation under the forces needs in general to be described by second order tensors. The relationship between stress and strain is usually assumed to be linear. The flux of fluid depends on the hydrostatic pressure and solute gradient (called osmotic pressure). The diffusive and convective transport mechanisms should be taking into account as well. The general three-dimensional theory describing transport in poroelastic materials (PEM) is very complex because relevant mathematical models involve 3D nonlinear partial differential equations (PDEs). As a result, in order to obtain analytical results, one-dimensional versions are usually discussed [9,10,11]. Here we study a one-dimensional model for fluid and solute transport in poroelastic materials(PEM) that was derived in [10] and generalized [11]. The governing equations of the model read as
where and are positive constant and the lower subscripts t and x denote differentiation with respect to these variables. The physical/biological meanings of the notations used above are presented in Table 1.
The nonlinear system of PDEs (1)–(5) was integrated in the stationary case. As a result, all steady-state solutions were identified and examples of their application for the glucose fluid transport in a biological tissue was provided [10]. In the nonstationary case, system (1)–(5) is not integrable, therefore the classical Lie method [12,13,14,15,16] was adopted for search exact solutions. Nowadays this method is widely used for construction of exact solutions of nonlinear PDEs arising in real-world applications and the most remarkable works are cited in the above cited books. However, it can be easily noted that there are not many studies devoted to multicomponent systems of PDEs because essential technical difficulties occur if one intends to find exact solutions for such systems by applying Lie symmetries. Taking into account the above observation, we refer the reader to the recent works [17,18,19,20,21,22], devoted to applications of the classical Lie method to the nonlinear three-component systems of PDEs.
Although several nontrivial Lie symmetries were identified and successfully applied for finding exact solutions in [10] (see also generalisations in [11]), some limiting cases have been not analysed therein. In particular, the special cases and/or were not examined in [10,11]. It is proved here that the special cases listed above lead to a rich Lie symmetry involving symmetry operators that do not occur for system (1)–(5) with . It should be stressed that the governing equations with and/or can still be used as a real-world model in some cases. For example, it is known that the diffusion term in equation (5) is negligible (i.e. ) if molecules of large size (because of high atomic weight) are dissolved. A typical example is albumin, for which the diffusivity is circa 50 times smaller than the glucose diffusivity [23].
This paper is organised as follows. In Section 2, all possible extensions of the Lie algebra of invariance of the nonlinear system of PDEs (1)–(5) are derived. It is proved that there are four inequivalent cases when the system admits additional Lie symmetries depending on the values of the parameters D and S. Section 3 is devoted to the constructions of exact solutions of system (1)–(5) with . Because the system admits an additional Lie symmetry, new reductions to systems of ODEs and, as a result, new exact solutions of the nonlinear model in question are derived. In Section 4, an exact solution is analysed in order to show its applicability for modeling solute transport in PEM. The analysis is supported by 3D plots of the solution. In Section 5, new exact solutions of the nonlinear system (1)–(5) with arbitrary D and S are constructed. The solution obtained were not identified in the previous study [10]. In Section 6, we present conclusions highlighting the main results obtained.
2. Lie Symmetries
Here we start from the governing equations (1)–(5) of the model for fluid and solute transport in poroelastic materials that was derived in [10]. By the application of the substitution
where is a so-called effective pressure, the above system takes the form
In (7), parameters , and S are constants satisfying the restrictions
Theorem 1.
According to the standard terminology, Lie algebra (9) is called the principal algebra of system (7) (see, e.g., Chapter 1 in [16]). Because the latter involves several parameters, a Lie symmetry classification problem arises that was not solved in [10].
We remind the reader that Lie symmetry classification (LSC) problems (group classification problems) are the most difficult those in Lie symmetry analysis. One may claim that Sophus Lie carried out some theoretical foundations for solving LSC problems, in particular he has done classification of Lie symmetries for a class of linear two-dimensional PDEs. During the last few decades, a vast number of papers were published devoted to theoretical foundations and applications of algorithms for classification of Lie symmetries of specific PDEs (systems of PDEs). Unfortunately, a misleading terminology is used in many of them because instead of a complete solving of the LSC problem for a given PDE, only examples of extensions of the principal algebra are presented. The current state-of-the-art and the relevant list of most important publications can be found in [16] (see Chapter 2 therein).
Theorem 2.
Proof of this theorem is based on the infinitesimal criteria of invariance, which was formulated by S. Lie in his pioneering works [12,13]. In the case of a system of PDEs of arbitrary order, this criteria can be found, e.g., in [14] (see Section 1.2.5). Note, system (7) consists of five PDEs of the second order. So, a linear first-order operator of the form
(here the coefficients and to-be-determined functions of independent and dependent variables) is a Lie symmetry (operator of Lie’s invariance, point symmetry) of system (7) provided the following equalities are simultaneously satisfied
for each solution of the PDE system (7). Here is the second-order prolongation of the operator X, which is again the first-order operator with coefficients defined by the well-known formulae via the first- and second-order derivatives of unknown coefficients and (see, e.g., [14], Section 1.2.1).
After relevant calculations, formulae (10) are reducible to a linear system of PDEs, called the system of determining equations (DEs), for finding the functions and . Some of the equations belonging to the system of DEs, do not contain parameters S and D, therefore solving them, we obtain the most general form of the Lie symmetry operator
where are arbitrary constants and ia an arbitrary smooth function, while the constant and the functions and must satisfy the restriction and the remaining DEs
If one assumes that all parameters arising in (7) are arbitrary constants then the result presented in Theorem 1 in a straightforward way is derived. However, here we need to determine all possible values of parameters (under restrictions (8)) when a wider Lie symmetry occurs. Looking at the system of DEs (12)–(15), one notes (see equations (12)) that two different cases, and , should be separately examined.
In the case, we immediately obtain So, the system of determining equations (12)–(16) is reduced to the form
If then one readily finds , hence the principal algebra (9) is only obtained. However, assuming , Cases 1 and 3 of Table 2 are obtained when and , respectively.
In the case, an extension of the principal algebra (9) via the operator can be easily identified. If then Case 2 in Table 2 is obtained.
Finally, special values and lead to the widest Lie symmetry. In fact, equations (12)–(14) simply disappear and the remaining equations are
Solving equation (18), one finds
Substituting the above function into equation (17), the function
is obtained. Thus, the Lie symmetry operator (11) with the above functions and produce exactly the Lie symmetries
listed in Case 4 of Table 2.
The proof is completed.
Although the cases listed in Table 2 are very special and are questionable from the applicability point of view, new Lie symmetries are very interesting. In particular, system (7) with admits the symmetry that can be not predicted using any physical laws. Here we study this case in detail and our goal is to construct a wide range of time-dependent solution.
3. Ansätze, Reductions and Exact Solutions in the Case
As it was noted above, the most interesting cases from the symmetry point of view are the second and the fourth cases (see Table 2) because they involve the Lie symmetry that cannot be predicted by any physical/biological consideration. The fourth case is rather artificial from applicability point of view. Indeed, the restrictions means that both diffusive and convective transports are neglected what is very strong assumption (however, one cannot claim that such a special case is absolutely unrealistic). Thus, we study the second case, in what follows.
The general technique for constructing exact solution using Lie symmetries is well-known from the theoretical point of view. There are two different approaches described, e.g., in Section 1.3 [16]. One of them is based on construction of optimal systems of inequivalent (nonconjugated) subalgebras of the given Lie algebra of symmetries. Although this technique is very popular, one successfully works only in the case of Lie algebras of low dimensionality (up to 4). In fact, all optimal systems for such algebras were described in a seminal work [24]. However, a pure algebraic problem occurs if one deals with a Lie algebra of the dimensionality 5 and higher. To the best of our knowledge, there is no generalisations of the results presented in [24] on higher-dimensional Lie algebras. Notably, the Lie algebra of symmetries of system (7) is infinity-dimensional (see the operator in Theorem 1).
The second technique for constructing exact solution via Lie symmetries is based on the most general linear combination of basic operaintors of the Lie algebra in question. Of course, many technical difficulties arise in the case of higher-dimensional Lie algebras, however, these difficulties can be overcome by a careful analysis of the relevant invariant surface condition. Here this is demonstrated in the case of Lie algebra with the basic operators
Let us consider the most general linear combination of Lie symmetries listed above
where and are arbitrary constants, (if then there is no reduction to an ODE system).
Depending on the value of the constants and , operator (19) produce three inequivalent ansätze for reduction of system (7) to ODE systems. Thus, one need to consider such cases :
;
;
.
From the very beginning, it can be noted that the function does not play role in the first two cases and we may set without losing a generality. In fact, ansätze obtained contain the added term in expressions for the function and this term vanishes after substituting into system (7). So, one always can generalise an arbitrary solution by inserting into the pressure component the additional term that simply follows from the Lie group generated by the operator :
In the third case, the function does play a role.
Substituting ansatz (20) into PDE system (7), one arrives at the ODE system
where new notations and are used.
We are looking for exact solutions of the ODE system (21) in the two essentially different subcases and .
Subcase. System (21) after the relevant calculations leads to the result
where are arbitrary constants and constant .
If , then the general solution of equation (22) has the form . Thus, taking into account ansatz (20) and the above formulae, the exact solution of the PDE system (7) with
(here is an arbitrary smooth function) is obtained.
If , then the general solution of equation (22) can be found in an explicit form only for some fixed function . Let us solve equation (22) assuming (here and n are arbitrary constants). So, one need to construct exact solutions of the equation
Equation (26) has essentially different general solutions depending on the value of the constants and n. In the simplest case when the general solution of equation (26) has the form
The obtained functions and from (27) lead to the components
of the exact solution of the PDE system (7) with and , while other components of the corresponding solution are presented in formulae (23)–(25).
Now let us return to equation (26). In the case this equation is reduced to the Bessel equation
if , and to the modified Bessel equation
if , by the substitution
Thus, the general solution of equation (26) with can be expressed in the following forms
if , and
if . Here J and Y are the Bessel functions, while I and K are the modified Bessel functions.
Note that solution (27) can be derived from (28)–(29) by setting in the last ones.
In the case the general solution of equation (26) has the form
Note that in the case and equation (26) has only complex solutions, not real ones.
The functions (from (28)–(30)) and produce the components
and
of the solutions of the PDE system (7) with . The remaining components of the corresponding solutions are still given by formulae (23)–(25).
Subcase. In this case, the functions and can be expressed via the function F, namely :
where the function F is a solution of the equation
while the function must be founded from the equation
ODE (32) is a nonlinear Abel type equations and its full integration is questionable, moreover, even particular solutions are unknown. However, assuming that the function F is linear, one can find the exact solution
provided the following restrictions are satisfied
Another possibility to integrate ODE (32) arises if one sets
In this case ODE (32) takes the form
The latter is integrable via the Lambert function:
where
The exact solution (36) can also be presented in the implicit form
It can be easily seen that a special case occurs when In this case, one again arrives at the linear function
Each of the exact solutions (34)–(37) can be used for finding the function by solving the linear ODE (33). Because the formulae obtained are very cumbersome (in particular, the Heun functions are obtained if one applies (37)), here we present only the details concerning solution (34). In this case, ODE (33) can be rewritten in the form
Although this equation is very awkward, one may find the substitution
transforming ODE (38) into the well-known Whittaker equation (see, e.g., [25])
where
The general solution of equation (40) has the form
where M and W are the Whittaker functions. In the case (that leads to the conditions or ), the function M takes the form Thus, the general solution of the Whittaker equation in this special case has the form
Taking into account (39) and (42), we arrive at the solution of ODE (38) under restrictions and , namely :
Using the obtained functions and the above formulae, one can construct exact solutions of the PDE system (7). In particular, setting in (43) for simplicity, an exact solution of the system in question can be written down in the form
where
Similarly, setting in (44), another solution of the PDE system (7) with can be derived in the form
while other components have the same form as in (45).
In the case operator (19) leads to the ansatz
where are new smooth functions, while
The special case is it means that the operator is not taken into account, hence one may apply ansatz (46) to system (7) with an arbitrary parameter S (see Section 5).
Here we substitute ansatz (20) with into PDE system (7) with to obtain a reduced ODE system. As a result, one arrives at the system
The first four equations of the ODE system (47) can be easily integrated, producing the functions
while the last equation on the function takes the form
It is difficult to construct exact solutions of equation (49) without additional restrictions. Note that equation (49) in the case is the Heun equation and its general solution can be constructed using software such as Maple. Since this case leads to very cumbersome formulae, we omit those here.
Let us set , then equation (49) takes the form
The latter is integrable in the terms of modified Bessel functions. Thus, we arrive at the exact solution of the PDE system (7) with :
Let us set , then equation (49) takes the form
Applying the substitution
to equation (50), we again arrive at the Whittaker equation (40) with the parameters
Note that we consider only the special case that leads to the condition
Now making the same calculations as in subcase , we obtain the general solution of equation (50)
Setting for simplicity and using formulae (46), (48) and (51), we arrive at the exact solution of the PDE system (7)
In the case operator (19) produces the ansatz (we remind the reader that the operator should be taken into account in this case):
where are new smooth functions. Substituting ansatz (52) into the PDE system (7) with , we arrive at the condition . In this case the corresponding ODE system has the form
Solving system (53), we obtain the exact solution of the PDE system (7) with as follows
where and are arbitrary smooth functions.
4. An Example of the Exact Solution Describing Solute Transport in PEM
In order to show that a given exact solution describes solute transport in PEM, one should check some properties from the very beginning. In particular, the components and must be nonnegative, moreover . The displacement function should be either nonnegative (this means that PEM is expanding), or nonpositive (PEM is shrinking). There is also a natural initial condition for the displacement, , i.e., no deformation of PEM in the initial time moment . Obviously, only some exact solutions satisfy the above requirements on a given space interval and for .
Here we look in detail at the exact solution (45). By using the space translation and setting and , the solution takes the form
Obviously, the initial condition is satisfied. It can easily be shown that all components of the solution (54) are bounded and nonnegative in the domain and if the following restrictions hold :
Using the function from (54) and formula (6) , one can derive the hydrostatic pressure of the poroelastic materials by the formula
Plots of the functions and p defined in the domain with the parameter restrictions (55) are presented in Figure 1 and Figure 2. The above restrictions (55) guarantee positive values of displacement, i.e. a given layer of PEM is expanding.
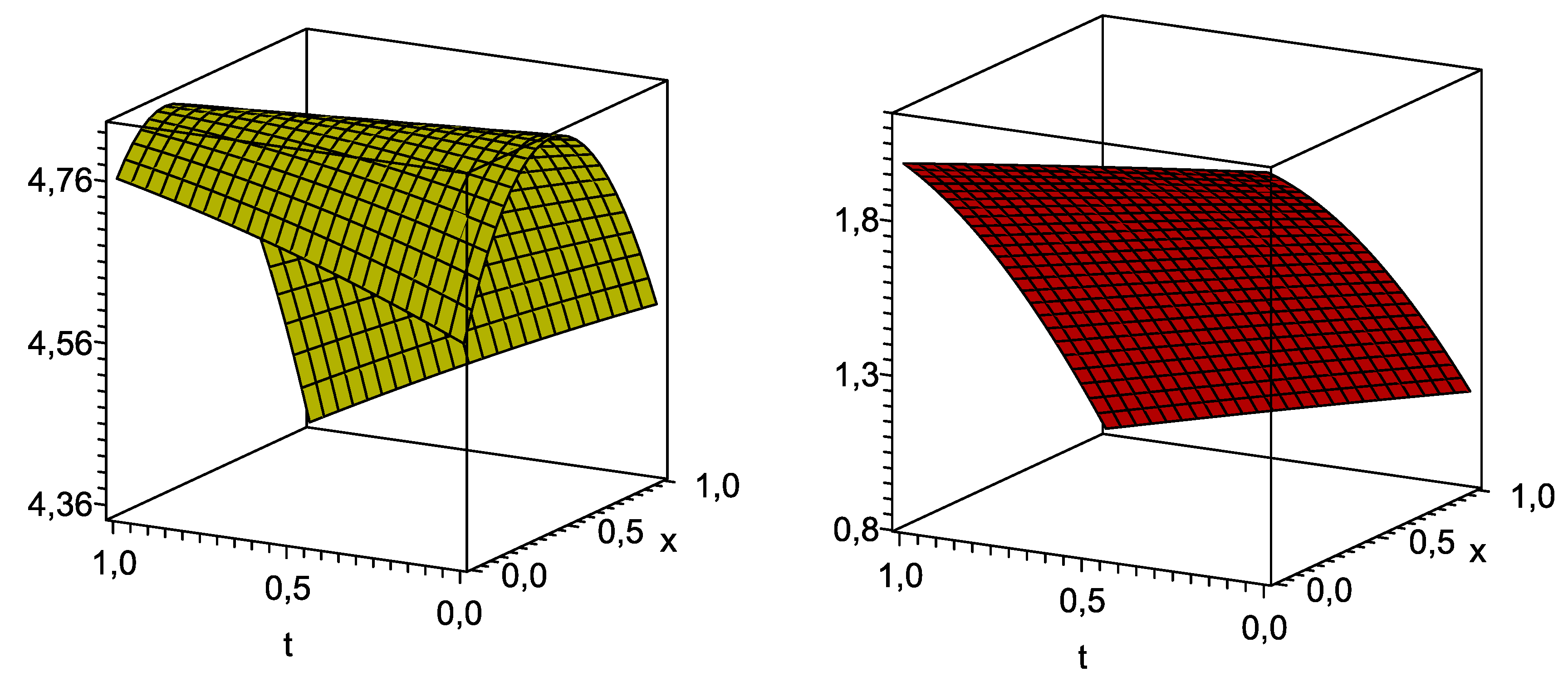
In order to get negative values of displacement, i.e. a given layer of PEM is shrinking, one needs the restrictions that are listed below. An example is presented in Figure 3 and Figure 4.
If then
If then
Thus, we have demonstrated that the exact solution (45) with correctly-specified coefficients can describe (at least qualitatively) the solute transport in PEM.
5. New Exact Solutions of System (7) with
In [10], some simplest exact solutions of system (7) with an arbitrary parameter S are constructed. Here we show how new solutions can be derived. As noted above in Remark 1, the condition in the ansätze constructed in Section 3 means that those are applicable for (7) with nonzero S as well.
The simplest case occurs in the case of ansatz (46). Substituting the latter into system (7) with an arbitrary parameter S, we arrive at the ODE system
Thus, solving ODE system (57) and taking into account (46) with we obtain the solution of system (7)
where and are arbitrary smooth functions, while is an arbitrary solution of the linear ODE
If then the solutions of the above ODE can be written down in an explicit form provided the function is correctly-specified (typical examples are and ).
If then
(here and are arbitrary constants).
Let us construct solutions using restrictions (35). In this case, the function F from (37) can be used to specify the functions in (31). Setting for simplicity and using the restriction , we arrive at the formulae
while the equation for finding the function takes the form
In (58), coefficients and are defined by the formulae
The general solution of equation (58) can be constructed via the Heun functions. To avoid cumbersome formulae, we consider only some cases in which equation (58) can be reduced to known equations, in particular, the Whittaker equation and the Bessel equation.
In the case of the the additional restrictions
equation (58) is transformed into the Whittaker equation (40) with the parameters
by the substitution
Taking into account (59), restrictions (60) lead to the condition Thus, using formula (41) and the above substitution, one obtains the function in an explicit form. Finally, applying ansatz (20) with the above specified beta-s and renaming , the following solution of the nonlinear system (7) was constructed:
where and are arbitrary constants
To construct exact solutions of equation (58) in terms of elementary functions, we consider the special case , which leads to the conditions
Thus, the general solution of equation (58) with has the forms
in the case , and
in the case
Thus, the component of the solution (61) of the PDE system (7), corresponding to solution (62) with , has the form
Setting in (63), another solution of the PDE system (7) can be derived in the form
while other components have the same form as in (61).
In the case when the additional restrictions
take place, i.e. (see (59))
equation (58) is transformed into the Bessel equation
if , and to the modified Bessel equation
if , by the substitution
Thus, the general solution of equation (58) under restrictions (64) takes the form
if , and
if . Here , and are the Bessel functions, and are the modified Bessel functions.
Taking into account the above formulae and renaming , the exact solution of the PDE system (7) with takes the form
where and are arbitrary constants, while
6. Conclusions
Here the one-dimensional model for fluid and solute transport in PEM based on the nonlinear PDE system (7) is studied. Although the model was recently derived and some exact solutions, in particular steady-state solutions and their applications, were studied in [10] and [11], special cases occurring when some parameters vanish were not analysed therein. Since the governing equations are nonintegrable in nonstationary case, the Lie symmetry method and modern tools for solving ODE systems are applied in order to construct time-dependent exact solutions. Depending on parameters arising in the governing equations, several special cases with new Lie symmetries are identified. Some of them have a highly nontrivial structure, see Cases 2 and 4 in Table 2, that cannot be predicted from a physical point of view or using Lie symmetries of other real-world models. Applying the symmetries obtained for reduction of the governing PDEs, multiparameter families of exact solutions are constructed, including those in terms of elementary and special functions (hypergeometric, Whittaker, Bessel and modified Bessel functions). A possible application of the solutions obtained is demonstrated in Section 4. It is shown that the exact solution obtained in Section 3 can describe (at least qualitatively) the solute transport in PEM provided relevant parameters are specified correctly. The obtained exact solutions can also be used as test problems for estimating the accuracy of approximate analytical and numerical methods for solving relevant boundary value problems for the nonlinear PDE system (7).
In Section 5, new exact solutions are constructed for the nonlinear PDE system (7) with arbitrary parameters. These solutions essentially generalize the results derived earlier in [10].
This work can be continued in different directions. For example, a natural generalisation of the model has been developed in [26] by taking into account internal sources/sinks. One may expect that the generalised model also admits new Lie symmetries provided some parameters vanish. Another work could be done in order to generalize the model on higher-dimensional cases and study properties of the model derived, in particular, applying the Lie symmetry method.
Acknowledgments
R.Ch. and A.V. acknowledges that this research was funded the British Academy (Leverhulme Researchers at Risk Research Support Grant).
References
- Taber, L.A. Nonlinear Theory of Elasticity. Applications in Biomechanics; World Scientific: New Jersey, 2004. [Google Scholar]
- Coussy, O. Mechanics and Physics of Porous Solids; John Wiley & Sons: Chichester, UK, 2010. [Google Scholar]
- Loret, B.; Simoes, F.M.F. Biomechanical Aspects of Soft Tissue; CRC Press: Boca Raton, 2017. [Google Scholar]
- Lacis, U.; Zampogna, G.A.; Bagheri, S. A computational continuum model of poroelastic beds. Proc. R. Soc. A Math. Phys. Eng. Sci. 2017, 473, 20160932. [Google Scholar] [CrossRef] [PubMed]
- Siddique, J.I.; Ahmed, A.; Aziz, A.; Khalique, C.M. A review of mixture theory for deformable porous media and applications. Appl. Sci. 2017, 7, 917. [Google Scholar] [CrossRef]
- Guerriero, V.; Mazzoli, S. Theory of effective stress in soil and rock and implications for fracturing processes: a review. Geosciences 2021, 11, 119. [Google Scholar] [CrossRef]
- Sowinski, D.R.; McGarry, M.D.; Van Houten, E.E.; Gordon-Wylie, S.; Weaver, J.B.; Paulsen, K.D. Poroelasticity as a model of soft tissue structure: Hydraulic permeability reconstruction for magnetic resonance elastography in silico. Front. Phys. 2021, 8, 617582. [Google Scholar] [CrossRef] [PubMed]
- Zheng, P.; Li, G.; Sun, P.; Xi, S.; Zhang, K. Couple stress-based gradient theory of poroelasticity. Math. Mech. Solids 2024, 29, 173–190. [Google Scholar] [CrossRef]
- Li, P.; Schanz, M. Wave propagation in a 1-D partially saturated poroelastic column. Geophys. J. Int. 2011, 184, 1341–1353. [Google Scholar] [CrossRef]
- Cherniha, R.; Stachowska-Pietka, J.; Waniewski, J. A Mathematical Model for transport in poroelastic materials with variable volume: derivation, Lie symmetry analysis, and examples. Symmetry 2020, 12, 396. [Google Scholar] [CrossRef]
- Cherniha, R.; Stachowska-Pietka, J.; Waniewski, J. A mathematical model for two solutes transport in a poroelastic material and its applications. Commun. Nonlinear. Sci. Numer. Simulat. 2024, 132, 107905. [Google Scholar] [CrossRef]
- Lie, S. Über die Integration durch bestimmte Integrale von einer Klasse linear partieller Differentialgleichung. Arch. for Math. 1881, 6, 328–368. [Google Scholar]
- Lie, S. Vorlesungen über Differentialgleichungen mit bekannten infinitesimalen Transformationen; Teubner: Leipzig, Germany, 1891. [Google Scholar]
- Bluman, G.W.; Cheviakov, A.F.; Anco, S.C. Applications of Symmetry Methods to Partial Differential Equations; Springer: New York, 2010. [Google Scholar]
- Arrigo, D.J. Symmetry analysis of differential equations; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Cherniha, R.; Serov, M.; Pliukhin, O. Nonlinear Reaction-Diffusion-Convection Equations: Lie and Conditional Symmetry, Exact Solutions and Their Applications; Chapman and Hall/CRC: New York, 2018. [Google Scholar]
- Cherniha, R.; Davydovych, V. A hunter-gatherer-farmer population model: Lie symmetries, exact solutions and their interpretation. Euro. J. Appl. Math. 2019, 30, 338–357. [Google Scholar] [CrossRef]
- Cherniha, R.; Davydovych, V. Exact solutions of a mathematical model describing competition and co-existence of different language speakers. Entropy 2020, 22, 154. [Google Scholar] [CrossRef] [PubMed]
- Alimirzaluo, E.; Nadjafikhah, M.; Manafian, J. Some new exact solutions of (3+1)-dimensional Burgers system via Lie symmetry analysis. Adv. Differ. Equ. 2021, 2021, 60. [Google Scholar] [CrossRef]
- Paliathanasis, A. Lie symmetry analysis of the one-dimensional Saint-Venant–Exner model. Symmetry 2022, 14, 1679. [Google Scholar] [CrossRef]
- Paliathanasis, A. Symmetry analysis for the 2D Aw-Rascle traffic-flow model of multi-lane motorways in the Euler and Lagrange variables. Symmetry 2023, 15, 1525. [Google Scholar] [CrossRef]
- Shagolshem, S.; Bira, B.; Sil, S. Application of symmetry analysis to viscoelastic fluid model. Commun. Nonlinear. Sci. Numer. Simulat. 2023, 125, 107417. [Google Scholar] [CrossRef]
- Cherniha, R.; Stachowska-Pietka, J.; Waniewski, J. A mathematical model for fluid-glucose-albumin transport in peritoneal dialysis. Int. J. Appl. Math. Comput. Sci. 2014, 24, 837–851. [Google Scholar] [CrossRef]
- Patera, J.; Winternitz, P. Subalgebras of real three- and four-dimensional Lie algebras. J. Math. Phys. 1977, 18, 1449–1455. [Google Scholar] [CrossRef]
- Zwillinger, D. Handbook of Differential Equations, 3rd ed.; Academic Press: Boston, 1997. [Google Scholar]
- Cherniha, R.; Davydovych, V.; Stachowska-Pietka, J.; Waniewski, J. A mathematical model for transport in poroelastic materials with variable volume: derivation, Lie symmetry analysis and examples. Part 2. Symmetry 2022, 14, 109. [Google Scholar] [CrossRef]
Figure 1.
Surfaces representing the components u (left) and (right) of the exact solution (54) with the parameters .
Figure 1.
Surfaces representing the components u (left) and (right) of the exact solution (54) with the parameters .
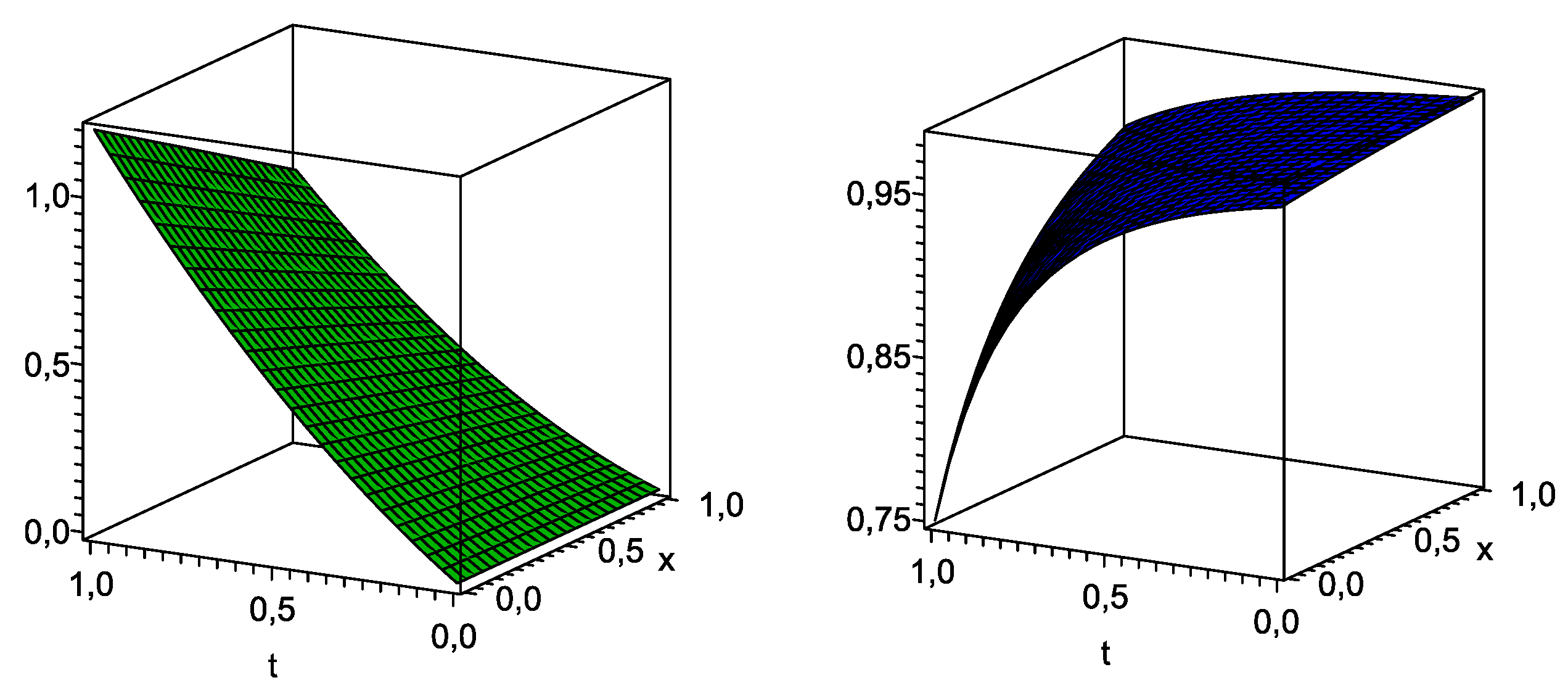
Figure 2.
Surfaces representing the components c (left) and p (right) of the exact solution (54) and (56) with the parameters .
Figure 2.
Surfaces representing the components c (left) and p (right) of the exact solution (54) and (56) with the parameters .
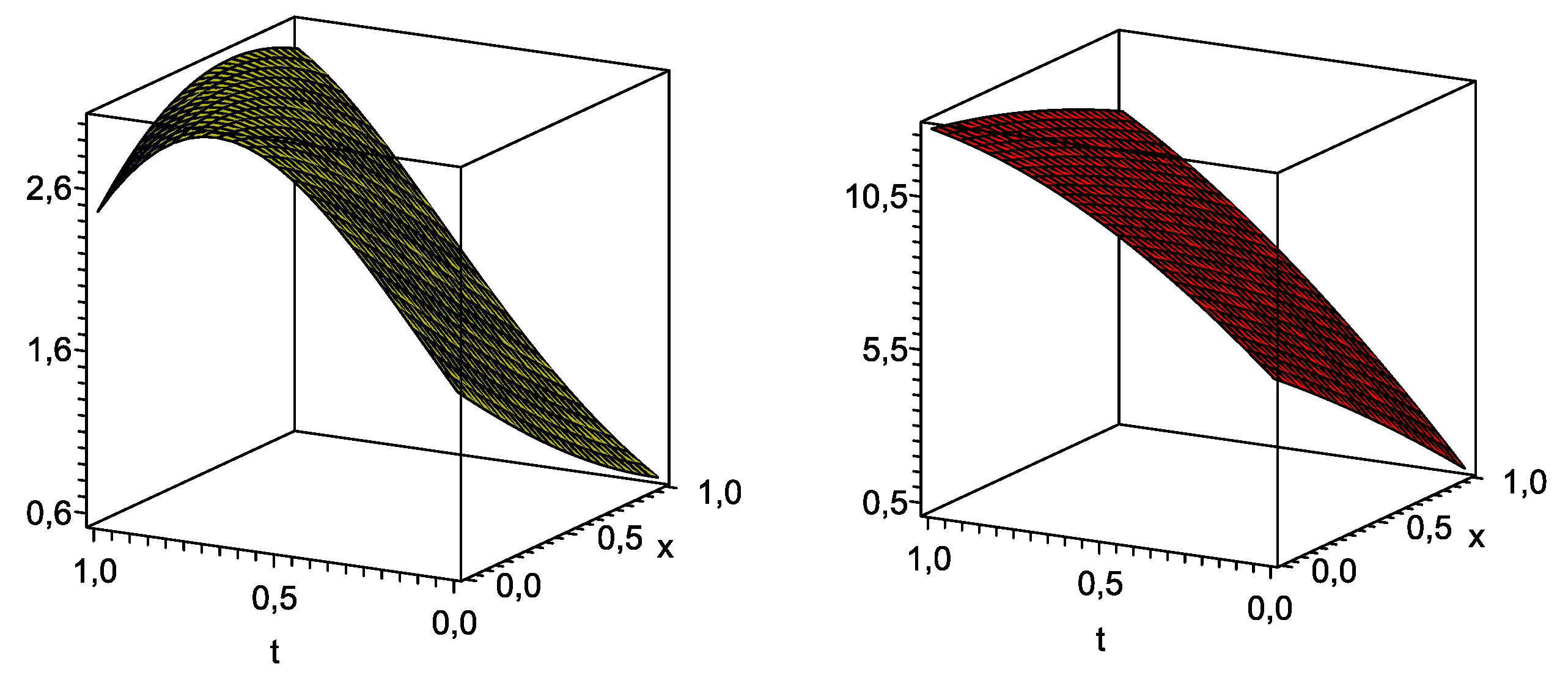
Figure 3.
Surfaces representing the components u (left) and (right) of the exact solution (54) with the parameters
Figure 3.
Surfaces representing the components u (left) and (right) of the exact solution (54) with the parameters
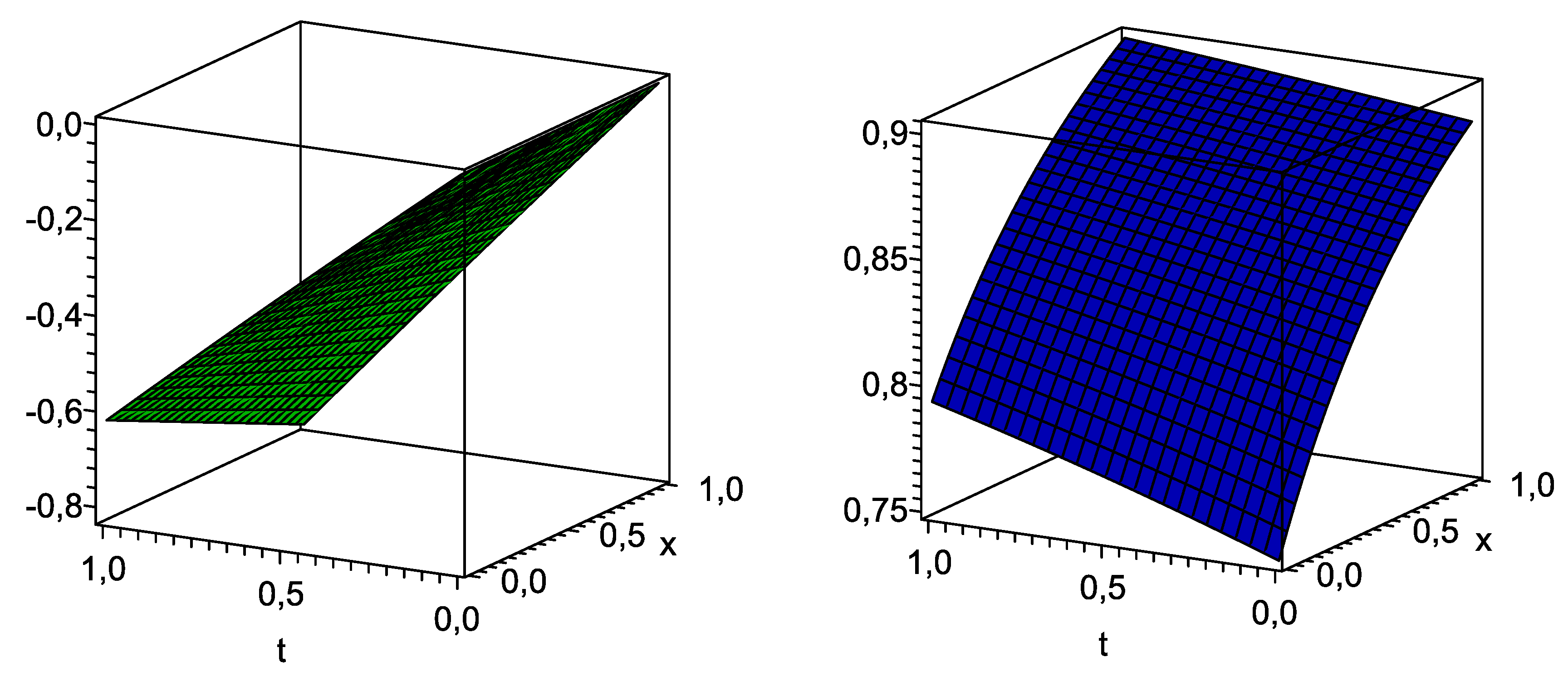
Figure 4.
Surfaces representing the components c (left) and p (right) of the exact solution (54) and (56) with the parameters
Figure 4.
Surfaces representing the components c (left) and p (right) of the exact solution (54) and (56) with the parameters

| Symbol | Description |
|---|---|
| u | deformation vector |
| mass density | |
| fractional volume of fluid phase F | |
| fractional volume of matrix phase M | |
| mass density of fluid phase F | |
| c | solute concentration in PEM |
| p | mechanical pressure in PEM |
| reflection coefficient of PEM | |
| gas constant times temperature | |
| elastic modulus with Lame constants and | |
| k | hydraulic conductivity |
| D | solute diffusivity in PEM |
| sieving coefficient of solute in the PEM |
Table 2.
Lie symmetries of system (7).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



