Submitted:
17 May 2024
Posted:
20 May 2024
You are already at the latest version
Abstract
In order to quickly develop a multi ship collaborative collision avoidance plan in multi ship encounter scenarios, a multi ship collision avoidance decision model is proposed in accordance with the requirements of the International Maritime Collision Avoidance Regulations, taking into account the collision avoidance operations in multi ship encounter scenarios. Firstly, the collision risk between ships is determined by the closest encounter distance (DCPA) and closest encounter time (TCPA). Secondly, a decision objective function is established based on rules, degree of ship deviation, and ship risk. Finally, the prediction mechanism is used to calculate the minimum value of the objective function and complete the collision avoidance decision. The simulation results show that in the scenario of multiple ship encounters, the collision avoidance model can achieve safe collision avoidance with a smaller steering frequency and a shorter col-lision avoidance time. The proposed multi ship collision avoidance model can provide reference for collision avoidance decision-making in multi ship encounter scenarios, which helps to im-prove the collision avoidance efficiency in multi ship collision avoidance
Keywords:
rule constraints
; Meeting multiple ships
; Avoiding collisions
; objective function
1. Introduction
With the development of the shipping industry, ships are gradually becoming larger/more specialized, and the inland traffic environment is becoming increasingly complex. Although ship driving technology is gradually improving, once a collision accident occurs, the impact on the environment and economy still accounts for a large proportion of inland accidents.
In scenarios where multiple ships will encounter, in addition to considering relevant hazards and collision avoidance measures, the collision avoidance decision system also needs to consider the situation where the ship deviates from the original route, which requires calculating the collision avoidance path of the ship. According to the results obtained from collision avoidance decision-making and path planning, their research methods can be divided into two types [1]: deterministic methods and heuristic methods. The deterministic method is a method of solving collision avoidance decision-making problems that only exist in one future objective state and one optimal solution, following a strictly defined calculation process, mainly including multi-agent bodies, expert systems, etc; Heuristic method is to search for a decision solution that meets the design requirements within a given search space. Compared with deterministic methods, the optimization results obtained include a series of feasible solutions such as genetic algorithm, ant colony algorithm, particle swarm algorithm, etc.
The determined methods include: Brcko [2] using fuzzy logic algorithm to establish a collision avoidance decision system and determine a suitable collision avoidance decision plan. However, the avoidance effect on target ships with relatively large relative directions and close distances is average. This decision-making method relies too much on expert knowledge and subjective experience, making it difficult to achieve good results in multiple ship collision avoidance problems. Zhang [3] proposed to analyze the collision avoidance action plan from the perspective of the ship and establish a complete system of avoidance mechanisms, including conventional and emergency avoidance decisions, in order to achieve the goal of dispersed collision avoidance decisions in situations where multiple ships encounter. From a global perspective, the preceding ships have taken corresponding avoidance measures, while the last ranked ship actually does not need to take any action, resulting in an unreasonable division of avoidance rules. Hirayama [4] proposed using the Distributed Stochastic Search Algorithm (DSSA) to achieve collaborative collision avoidance in multi ship encounter scenarios, but did not consider rule constraints. Lu [5] proposed to divide the surrounding area of the ship into four different levels of avoidance areas without considering the coordination of ship avoidance actions. By modifying the repulsive market algorithm function, fast planning of avoidance paths between multiple ships can be achieved. Kang [6] proposed a path planning method for calculating the optimal collision free navigation path of ships based on the DE algorithm. Simulation and experimental results show that the algorithm can generate a safe and suitable path from various angles when multiple ships meet. Ha [7] proposed an improved method for the quantitative calculation of CR in ship navigation, combining the advantages of two existing methods. This method utilizes CPA to calculate CR and defines the ship domain as the critical value of CR to ensure reliable collision avoidance. The results indicate that the proposed method can be used to obtain quantitative CR for collision avoidance. Huang [8] proposed a human-machine interface based collision avoidance system framework (HMI-CAS), which facilitates automatic collision avoidance and allows operators to safely take over control of MASS. At the same time, simulation verification was conducted on the proposed HMI CAS. The results indicate that the proposed system can share decisions with operators. Zhen [9] proposed a comprehensive collaborative collision prevention framework and developed a new collision prevention cost function. And use the proportional integral derivative (PID) algorithm to adjust ship maneuvering based on the derived collision avoidance decision. The results indicate that the proposed collaborative collision prevention framework improves navigation safety and economic benefits while ensuring compliance. Lee [10] developed a new standard for evaluating when standby vessels should take collision avoidance measures, known as Calculate Distance at Collision (CDC). This result is calculated based on the parameters of the ship, and this study helps determine the timing of actions taken by standing ships to avoid collisions.
Heuristic method: Tsou [11] introduces dangerous area prediction technology on the basis of the original genetic algorithm to meet the requirements of economy and safety, and obtain the globally optimal avoidance path. However, the existence of avoidance danger between target ships leads to unpredictable avoidance actions, and this method is no longer applicable. Lazarowska’s [12] method for solving multi ship collision avoidance is to introduce the control time parameter into the algorithm, but it does not consider the possible collision danger between target ships. Scholars have developed deep reinforcement learning models suitable for multi ship encounter scenarios, but the model structure is highly dependent on data and cannot meet the real-time requirements for collision avoidance under changing location environments [13,14]. Wei [15] established an avoidance decision model based on the danger immune algorithm, which is suitable for the optimal operation plan of ships in the situation of two ships encountering each other. Zhang [16] proposed an Autonomous Collision Avoidance Decision System (CADMS) suitable for ship motion uncertainty based on the idea of Model Predictive Control (MPC). The proposed model can achieve safe navigation in collision avoidance decision-making systems, and the results show that the decision-making system can effectively respond to situations where multiple ships encounter target ships suddenly changing their course or speed. Li [17] integrates human thinking experience into actual collision avoidance decision-making and proposes an intelligent collision avoidance model that is more in line with the operator’s understanding, thereby improving the credibility and autonomy of the model. In addition, a performance evaluation model based on on-site theory was designed, which combines human experience with algorithmic advantages to make optimal decisions in complex scenarios. The results indicate that the architecture can effectively play a role in various scenarios. Wang [18] studied the collision avoidance system of autonomous ships in complex encounter scenarios such as busy ports. Generate collision maps from complex and dynamic scenes as inputs for deep reinforcement learning (DRL) and propose new reward functions to train DRL models to reduce collisions and ensure compliance. Chun [19] proposed a path generation algorithm based on deep reinforcement learning (DRL), compared it with the traditional path planning algorithm A * algorithm, and analyzed the results in different scenarios. The results indicate that the proposed method reliably avoids collisions caused by complex and unexpected changes through flexible paths. Rong [20] proposed a new method for automatic identification of ship collision avoidance behavior based on an improved sliding window algorithm. By studying four typical encounter scenarios, the feasibility and effectiveness of the proposed method were demonstrated. This method can be applied to accurately detect ship collision avoidance behavior from trajectory data of automatic recognition systems, and can characterize collision avoidance behavior as the basis for ship collision avoidance decision-making.
At present, scholars at home and abroad have conducted multiple studies on the issue of automatic collision avoidance decision-making for ships. However, most of these studies are difficult to directly apply to collision avoidance decision-making in scenarios where multiple ships intersect, lacking consideration of rules and coordination issues among ships. In view of such issues, this article establishes a ship collision avoidance model to resolve the conflict of avoidance operations in multi ship collision avoidance. Firstly, the collision avoidance problem in rule-based multi ship encounter scenarios is discussed. Then, an automatic collision avoidance model is established, which includes collision risk assessment, encounter situation judgment, and objective function construction. Finally, simulation experiments are designed to verify the effectiveness of the method in multi ship encounter scenarios.
2. Problem Analysis
The main considerations for autonomous collision avoidance decision-making in multi ship encounter scenarios are the real-time and rationality of the decision-making. Rapid response in complex and ever-changing environments is a requirement for collision avoidance decisions. If real-time performance cannot be guaranteed or decisions cannot be made within an acceptable range, it will seriously affect the safety of ship navigation. Regarding the rationality of decision-making, it is necessary to combine ship maneuverability and rules. In the rules, it is defined that in situations where there is a risk of collision, the giving way ship should actively avoid the giving way ship during the avoidance process; The ship being given way should also pay attention to the actions of the ship giving way and take action to assist in avoiding the situation at that time. However, due to the complexity of the actual navigation environment, it is difficult to describe all possible situations in a regular form. For scenarios where multiple ships encounter each other, ships need to simultaneously avoid multiple incoming ships. After taking avoidance actions against incoming ships with collision risks, “giving way to ships” creates new collision hazards for nearby ships. We define it as operational avoidance of conflicts. We fully consider the coordination of rules and multi ship avoidance based on the collaborative theory, and construct an automatic collision avoidance model to reduce operational avoidance conflicts.
Assuming ships meet within a certain distance, Ship and Ship are both “giving way ships” relative to Ship , based on the rules, the avoidance operation should be carried out, and after the avoidance operation, Ship formed a more urgent situation with Ship .
3. Methodology
The Regulations on River Collision Avoidance in the People’s Republic of China (hereinafter referred to as the “Regulations”) provide specific provisions for the encounter situations and corresponding responsibilities between two ships in mutual visibility, while only providing principle guidance for multi ship encounter problems. It is required to follow the relevant provisions of the “Navigation and Avoidance” clause in Chapter 2 of the Regulations, handle the aircraft types that encounter problems according to the crew’s usual practices and good ship skills principles. Based on this theory, we adopt the following processing methods and approaches according to the rules. Firstly, based on the rules, we identify the encounter situation between ships that pose a collision risk, predict the actions that the target ship will take, and the ship’s position in the encounter situation. This ship makes a decision that meets the requirements of a good ship. The collision avoidance action decision plan required by the art. The general process of executing multi ship collision avoidance decisions is shown in Figure 1, where x and y represent the longitude and latitude of the ship, respectively; ν is the speed of the ship; φ is the heading angle; Δδ is the steering angle after the decision.
1. In the information perception stage, information related to the position, heading, speed, and orientation of the ship and the target ship, as well as the ship’s motion parameters, are obtained through AIS, GPS, etc., and the environment in which the ship navigates is mastered. This article assumes that ship information exchange will occur in the scene;
2. The design phase of ship collision avoidance strategy involves calculating the estimated parameters such as DCPA and TCPA between ships, as well as raw data on collision risk, and identifying the situation of ship encounters;
3. If there is a danger, determine the avoidance plan based on the establishment of a coordinated avoidance mechanism, including avoidance actions taken by the giving way ship and avoidance actions taken by the ship being avoided.
3.1. Ship Maneuverability Model
Considering the issue of ship maneuverability, when determining the steering angle for ship collision avoidance, it is necessary to determine the ship’s collision avoidance navigation trajectory. Using the first-order equation for ship maneuvering motion δ Obtain the heading at any time as
The value of the ship’s turning index K is set to 0.0579, and the value of the ship’s following index T is set to 69.9784, is the steering angle of the ship and is angular acceleration. Using formula (1), is obtained, the angular velocity can be continuously updated from time t-1 to time t, and then the ship’s heading can be updated accordingly. The ship’s future navigation route for a certain period of time when operating a specific steering angle can be estimated, resulting in a navigation route with high similarity.
3.2. Collision Hazard Assessment
The first step in determining whether a ship needs to perform avoidance operations is to determine whether there is a risk of collision. The Rules do not provide a definition of collision danger, but many of its provisions are based on the premise of constituting collision danger, so it is necessary to quantify collision danger. In navigation practice, ship pilots generally use DCPA, TCPA, and the distance between two ships to determine whether there is a risk of collision between the two ships.
Among them, is the heading angle of this ship, is the heading angle of the target ship, is the speed of the ship, is the speed of the target ship, is the relative speed, and D is the distance between the two ships.
At time t, for ship , if there is a ship within the range of 6n miles, and both Equations (4) and (5) are satisfied, it is considered that there is a risk of collision.
In Equations (5) and (6), is the closest encounter distance between the ship i and ship j at time t, is the closest encounter time between ship i and ship j at time t, and is the safe encounter distance, which depends on navigation conditions and ship size. Lucas [21] constructed a safe encounter distance model by analyzing the principles of radar target parameter calculation and ship collision risk assessment. Jiang [22] proposed a new method for autonomous ship collision avoidance based on attention based deep reinforcement learning (ADRL). This study focuses on open water areas, using a comprehensive mathematical model. When two ships encounter , it is set to 1n miles, and when three ships encounter , it is set to 0.54 n miles. By using this method, all ships are divided into two categories: collision dangerous ships and and safe sailing ships ( and or ).
3.3. Judge the Situation of Ship Encounter
The basis for achieving autonomous collision avoidance in open water environments where multiple ships encounter each other is accurate judgment of the ship’s encounter situation. Based on the understanding of rule constraints and the crew’s usual practices, the encounter situation is divided into encounter, overtaking, and cross encounter, as shown in Figure 2.
According to Articles 11 to 15 of the rules, when there is a risk of collision between ships, if the other ship is in positions A, B, or E, this ship is a passing ship and needs to perform collision avoidance operations; When the target ship is in positions C and D, this ship is a direct sailing ship. Only when the passing ship has not carried out collision avoidance operations or a situation of urgency has arisen, this ship needs to carry out collision avoidance operations; When the other ship is located in area A or E, it is usually necessary to make a right turn to avoid collisions and pass through the rear of the other ship as much as possible.
3.4. Reward Mechanism Module
When the position, speed, and heading of a ship in a given scenario are known, it is necessary to make a collision avoidance operation for a dangerous ship. Ship collision avoidance needs to consider three aspects: the degree of ship deviation, the risk of ship collision, and compliance with rules. We will construct a reward mechanism from these three aspects.
Yaw reward objective function: , based on the degree of deviation from the destination, expressed as an angle, calculates the angle between the vector pointing to the destination and the heading vector of the ship, and defines this angle as the degree of deviation from the destination. As shown in Equation (6), means the ship itself, is the target heading angle of the ship, is the heading angle of the ship, and the larger the distance from the target heading, the greater the function value, .
Ship collision risk function: , representing the collision risk between this ship and ship j. During the navigation of a ship, due to the maneuverability of the ship, it is not possible to immediately change its course after steering. Only after steering for a period of time can the ship reach the predetermined course. TimeWindow is a time when a ship predicts its future position based on its current position, course, and speed with the target ship. is the most recent encounter time of this ship relative to the target ship. When is larger, the risk of ship collision is lower and the function value is smaller, .
The cost function of ship collision avoidance, consists of the following two parts: firstly, the sum of collision risks for target ships in collision danger; secondly, the yaw reward function, parameter α The weighting factor for the relationship between safety and efficiency, α The lower the value, the more emphasis is placed on efficiency. In this collision avoidance model, α Set the value to 1.
Based on the consideration of rules, we also establish the COLREG reward objective function . The cost function for ship collision avoidance consists only of collision risk and yaw reward. Based on rules, a certain amount of reward should be given to avoidance schemes that comply with rules, in order to break the constraints of cost reduction by following rules. That is, in multiple optional directions with the same collision avoidance cost, right turn avoidance should be chosen.
The total objective function range of the constructed ship yaw reward function, collision avoidance risk objective function, and rule violation objective function is [0, 1]. If weights are assigned to each objective function ,(), Then the multi-objective function forms a single objective function:, when the larger the value of , the more emphasis is placed on compliance with the rules. Find the minimum value for F, and the parameter corresponding to the minimum value is the optimal collision avoidance path parameter.
3.5. Determination of Collision Avoidance Path
As shown in Figure 3, when there is a collision risk between ship i and ship j, after determining the “giving way ship” and “direct sailing ship”, the “giving way ship” is divided into three avoidance turning rudder angles [-2 °, 0 °, 2 °]. Given the current navigation position, direction, speed, and operating rudder angle of the target ship, predict the ship’s position and navigation direction after traveling at the current rudder angle and speed for 10 seconds, At the same time, predict the ship’s position and sailing direction after traveling at three avoidance turning rudder angles and the current speed for 10 seconds. Calculate the objective function based on the relative position and sailing direction of the ship and the target ship after 10 seconds, and take the avoidance turning rudder angle corresponding to the minimum value of F for steering. This article sets a collision avoidance decision every 10 seconds, selecting the relatively optimal avoidance turning angle from short-term decisions to accumulate the best collision avoidance path.
4. Results and Discussion
The three simulation experimental ships are all randomly generated, and the range of values for their initial ship position (x, y), headingφ, and velocity v is shown in Table 1. We set up two different scenarios. Scenario 1: Increase compliance with rules, almost believing that ships must comply with rules during navigation, with , . Scenario 2: Taking into account the importance of safety and economy comprehensively, with , .
The avoidance plan and ship trajectory in Scenario 1 are shown in Figure 4.
As shown in Figure 5, from the initial position, S1 and S2 are both “giving way boats” relative to S3. To avoid S3, S2 makes a right turn to avoid it, while S1 makes a larger right turn to avoid it. The real-time steering angle is shown in Figure 9. When T=380s, there is no risk of collision between S1 and S3, and they should return to the initial heading as soon as possible. There is still a risk of collision between S2 and S1, and according to the rules, S1 still needs to make a right turn to avoid it. S1 must stay on the new route for a long time to avoid collision with S2. Due to the initial speed setting of S1 speed being greater than S2 speed, when T=570s, it is not recommended to maintain the target ship’s clearance on the new route for too long while S1 turns to the port side according to the rules, in order to avoid a larger angle deviation from the target route. S1 begins to turn left and return to the target direction, passing through the bow of S2 ship, which poses a safety hazard. S1 avoidance amplitude is 29 °, and the recovery target heading is 942s; The avoidance range of S2 is 35 °, and the recovery target heading is 734s.
The avoidance plan and ship motion trajectory in Scenario 2 are shown in Figure 5. From the initial position, the encounter situation in Scenario 1 is roughly the same. The avoidance amplitude of S1 is 21 °, and the recovery target heading is 478 seconds; The avoidance range of S2 is 24 °, and the recovery target heading is 590s. Compared to Scenario 1, the avoidance range and resumption time are reduced, improving avoidance efficiency.
Figure 6 and Figure 7 show the distance time images between ships in Scenario 1 and Scenario 2, respectively. From Figure 8, it can be seen that the collision avoidance scheme in Scenario 2 can ensure that the distance between ships is not less than the safe encounter distance, and the distance changes uniformly; Comparing Figure 6, it can be seen that the improvement lies in the fact that S1 and S2 both serve as yield ships for S3, reducing the impact of S2’s collision avoidance decision on S1’s decision and allowing the two ships to pass more safely and quickly, returning to the target heading. Figure 8 and Figure 9 show the real-time steering angles in scenarios 1 and 2, respectively. By comparison, it can be seen that steering in scenario 1 is significantly more frequent, which increases the difficulty of avoiding maneuvers.
According to the simulation results, it can be seen that in the scenario of multiple ships encountering each other, this collision avoidance model can ensure the safety of ships in the event of collision avoidance operations. The comparison results show that this model reduces the frequency of steering, the amplitude of ship avoidance, and the time to restore heading, improving avoidance efficiency.
5. Conclusions
A ship collision avoidance decision model is proposed to make safe collision avoidance decisions in open water by analyzing the ship collision avoidance schemes under the constraints of the Domestic River Collision Avoidance Regulations of the People’s Republic of China. The simulation experiment conducted in the encounter scenario shows that the model can complete collision avoidance under multi ship encounter conditions and obtain the optimal path, which is safer and more economical than before improvement. Although there is a relationship between parameter control safety and efficiency in the objective function, this issue has not been fully discussed, and which value can achieve the best balance between safety and efficiency still needs to be considered. This article only considers changing the direction of avoidance for collision avoidance, without considering the impact of speed changes on collision avoidance effectiveness. In the following research, the model should be further improved, taking into account more complex environmental disturbances and incorporating static and dynamic obstacles, which is more in line with navigation reality.
Author Contributions
Conceptualization, J.X. and J.M.; methodology, P.J.; software, Z.L.. and J.M.; validation, J.X, Z.L., P.J. and J.M.; formal analysis, J.X.; investigation, J.X.; resources, J.X. and P.J.; data curation, J.X. and J.M.; writing—original draft preparation, J.X, Z.L., P.J. and J.M.; writing—review and editing, J.X, Z.L., P.J. and J.M.; visualization, J.X. and P.J.; supervision, J.X. and Z.L.; project administration, J.X.; funding acquisition, J.X. and P.J. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by “Research on the practical experience and application scenarios of the Yangtze River waterway in the national high-grade waterway network”.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Acknowledgments
We would like to thank the anonymous reviewers for their insightful comments and suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Tarn C K, Bucknall R, Greig A. Review of Collision Avoidance and Path Planning Methods for Ships in Close Range Encounters[J].Journal of Navigation, 2009, 62(3):455-476. [CrossRef]
- Brcko T, Svetak J. Fuzzy Reasoning as a Base for Collision Avoidance Decision Support System[J].Promet-Traffic & Transportation, 2013, 25(6):555-564. [CrossRef]
- Jinfen Zhang et al. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs[J]. Ocean Engineering, 2015, 105: 336-348.
- Donggyun, Hirayama, Katsutoshi, et al.Distributed Stochastic Search Algorithm for Multi-ship Encounter Situations[J].[2024-05-09].
- Lu H. COLREGS-Constrained Real-time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields[J].Journal of Navigation, 2018, 72(3):1-21. [CrossRef]
- Kang Y T, Chen W J, Zhu D Q, et al. Collision avoidance path planning in multi-ship encounter situations[J]. Journal of Marine Science and Technology, 2021, 26(4): 1026-1037.
- Ha J, Roh M I, Lee H W. Quantitative calculation method of the collision risk for collision avoidance in ship navigation using the CPA and ship domain[J].Journal of Computational Design and Engineering, 2021. [CrossRef]
- Huang Y, Chen L, Negenborn R, et al.A Ship Collision Avoidance System for Human-Machine Cooperation During Collision Avoidance[J].Ocean engineering, 2020. [CrossRef]
- Zhen R, Shi Z, Gu Q, et al.A novel deterministic search-based algorithm for multi-ship collaborative collision avoidance decision-making[J].Ocean engineering, 2024(Jan.15):292.
- Lee H J, Furukawa Y. Timing of stand-on ship actions for cooperative collision avoidance under calm water condition[J].Ocean engineering, 2022.
- Tsou M C. Multi-target collision avoidance route planning under an ECDIS framework[J].Ocean Engineering, 2016, 121(JUL.15):268-278. [CrossRef]
- Agnieszka Lazarowska. Research on algorithms for autonomous navigation of ships[J]. WMU Journal of Maritime Affairs, 2019, 18(2): 341-358.
- Silver D, Lever G, Heess N, et al.Deterministic Policy Gradient Algorithms[J].PMLR, 2014.
- Yasukawa H, Yoshimura Y. Introduction of MMG standard method for ship maneuvering predictions[J].[2024-05-09].
- Chao-Wen W. An ImproVed Ant Colony Algorithm for Robot Path Planning[J].Science & Technology Information, 2010.
- Zhang K, Huang L, He Y, et al.A real-time multi-ship collision avoidance decision-making system for autonomous ships considering ship motion uncertainty[J].Ocean engineering, 2023(Jun.15):278.
- Li Y, Peng Y, Zheng J. Intelligent ship collision avoidance model integrating human thinking experience[J]. OCEAN ENGINEERING, 2023, 286: 115510.
- Wang Y, Xu H, Feng H, et al. Deep reinforcement learning based collision avoidance system for autonomous ships[J]. OCEAN ENGINEERING, 2024, 292: 116527.
- Chun D H, Roh M I, Lee H W, et al. Deep reinforcement learning-based collision avoidance for an autonomous ship[J]. Ocean Engineering, 2021, 234: 109216.
- Rong H, Teixeira A P, Guedes Soares C. Ship collision avoidance behaviour recognition and analysis based on AIS data[J]. Ocean Engineering, 2022, 245: 110479.
- Lucas D, Crane C. Development of a multi-resolution parallel genetic algorithm for autonomous robotic path planning[J].IEEE, 2012.
- Jiang L, An L, Zhang X, et al.A human-like collision avoidance method for autonomous ship with attention-based deep reinforcement learning[J].Ocean engineering, 2022.
Figure 1.
Framework diagram of automatic collision avoidance model in multi ship encounter scenarios.
Figure 1.
Framework diagram of automatic collision avoidance model in multi ship encounter scenarios.
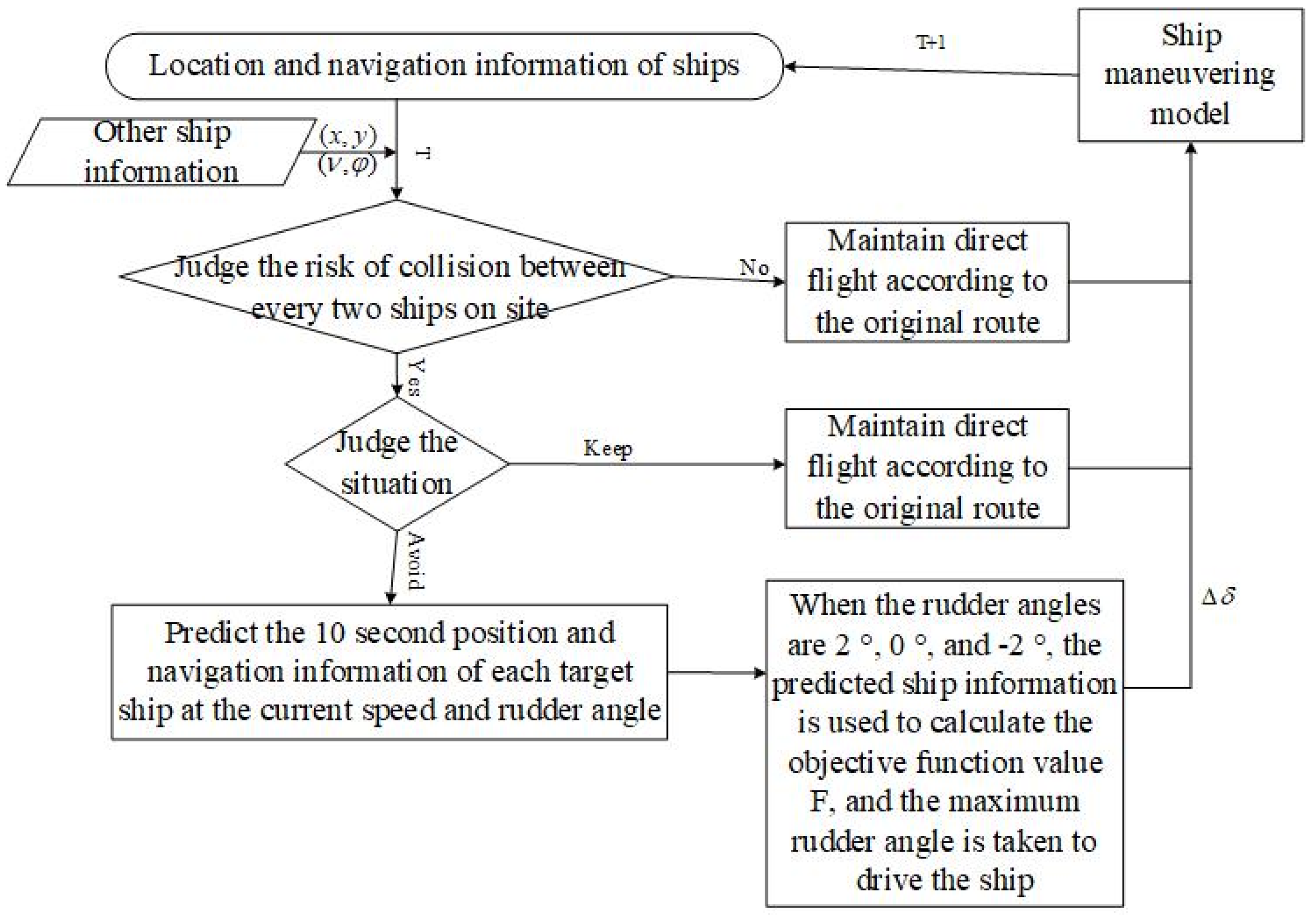
Figure 2.
Classification of ship encounter situations.
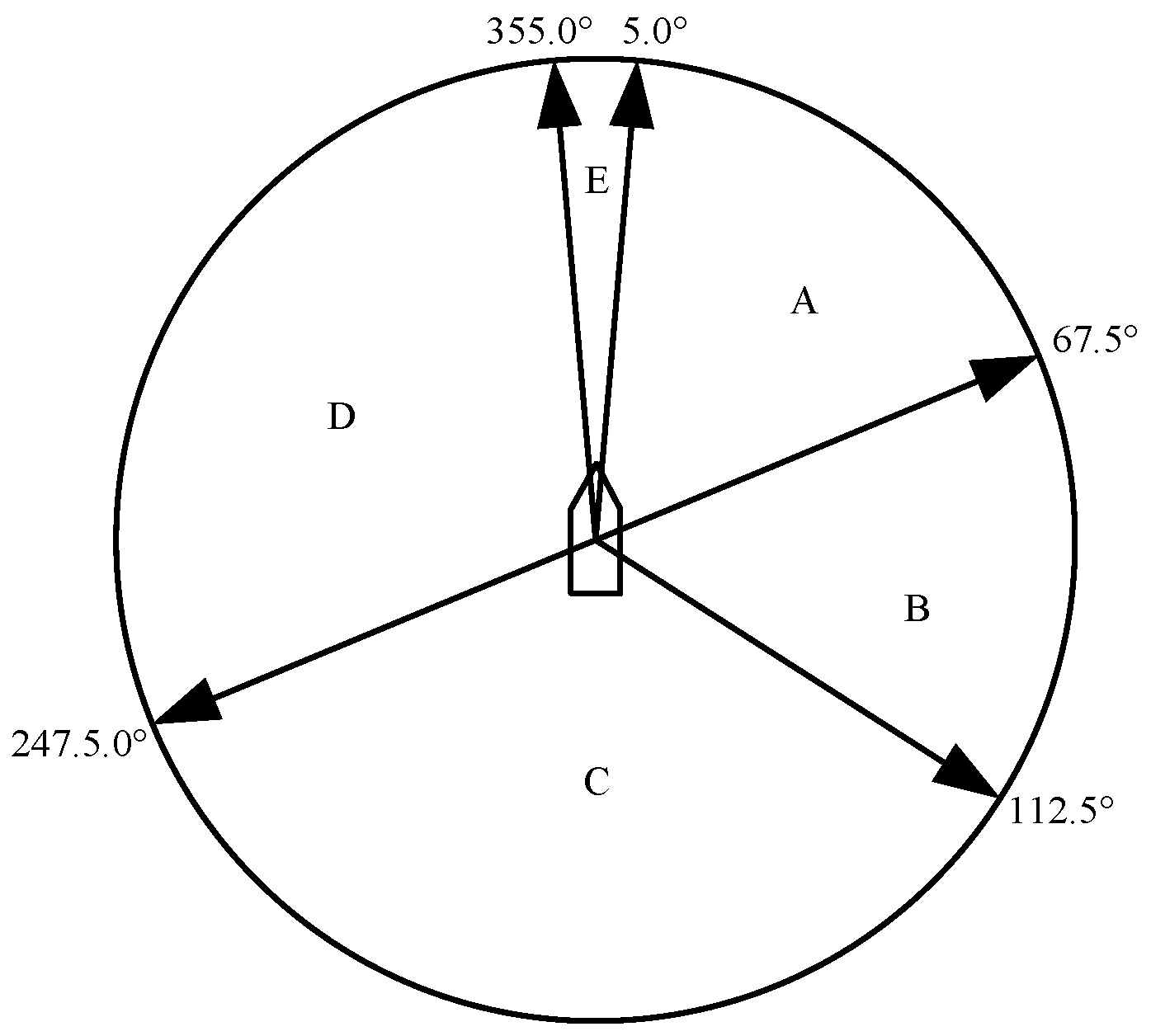
Figure 3.
Collision avoidance predicted by the ship moving forward.
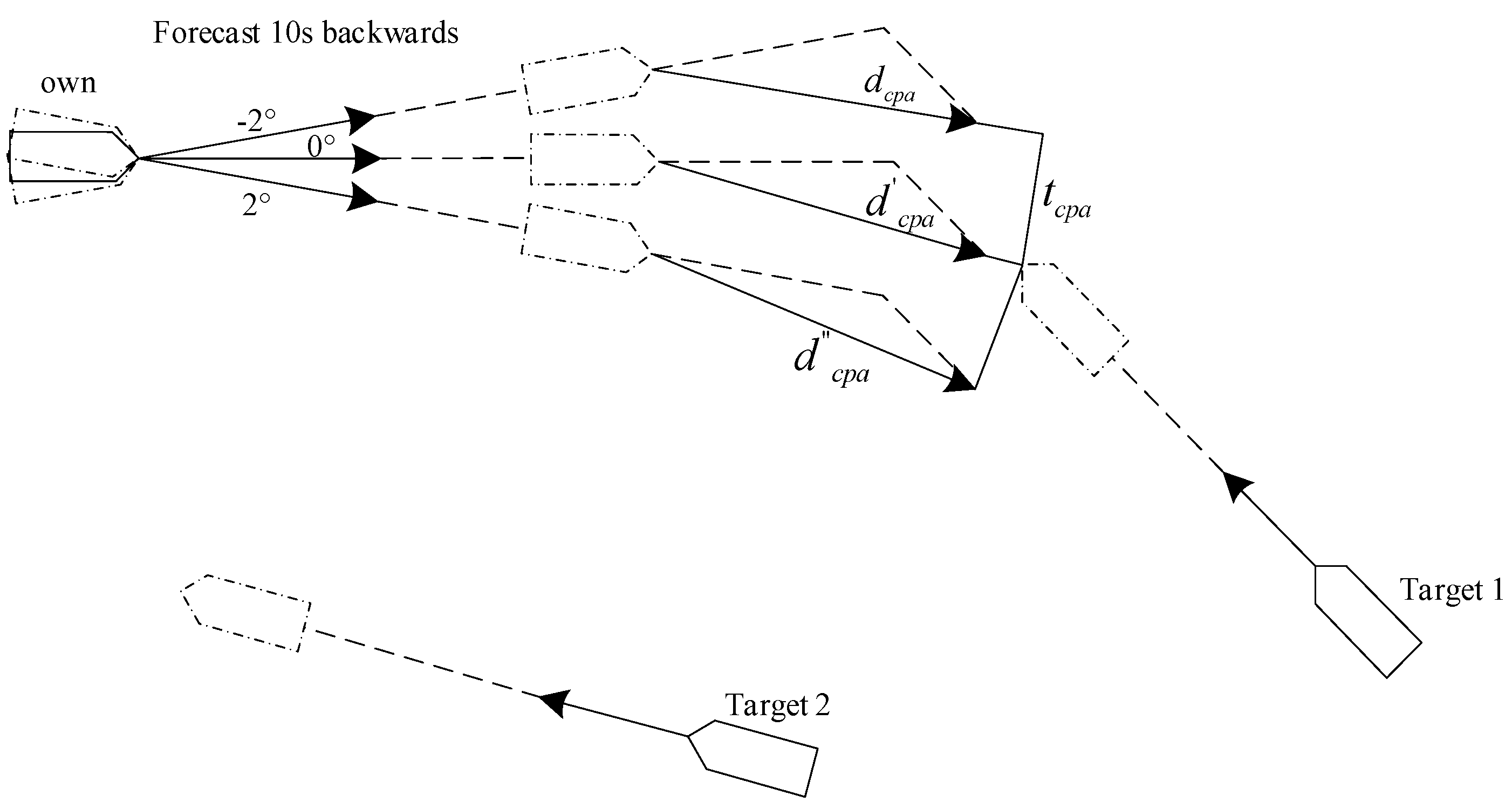
Figure 4.
Ship Trajectory in Scenario 1.
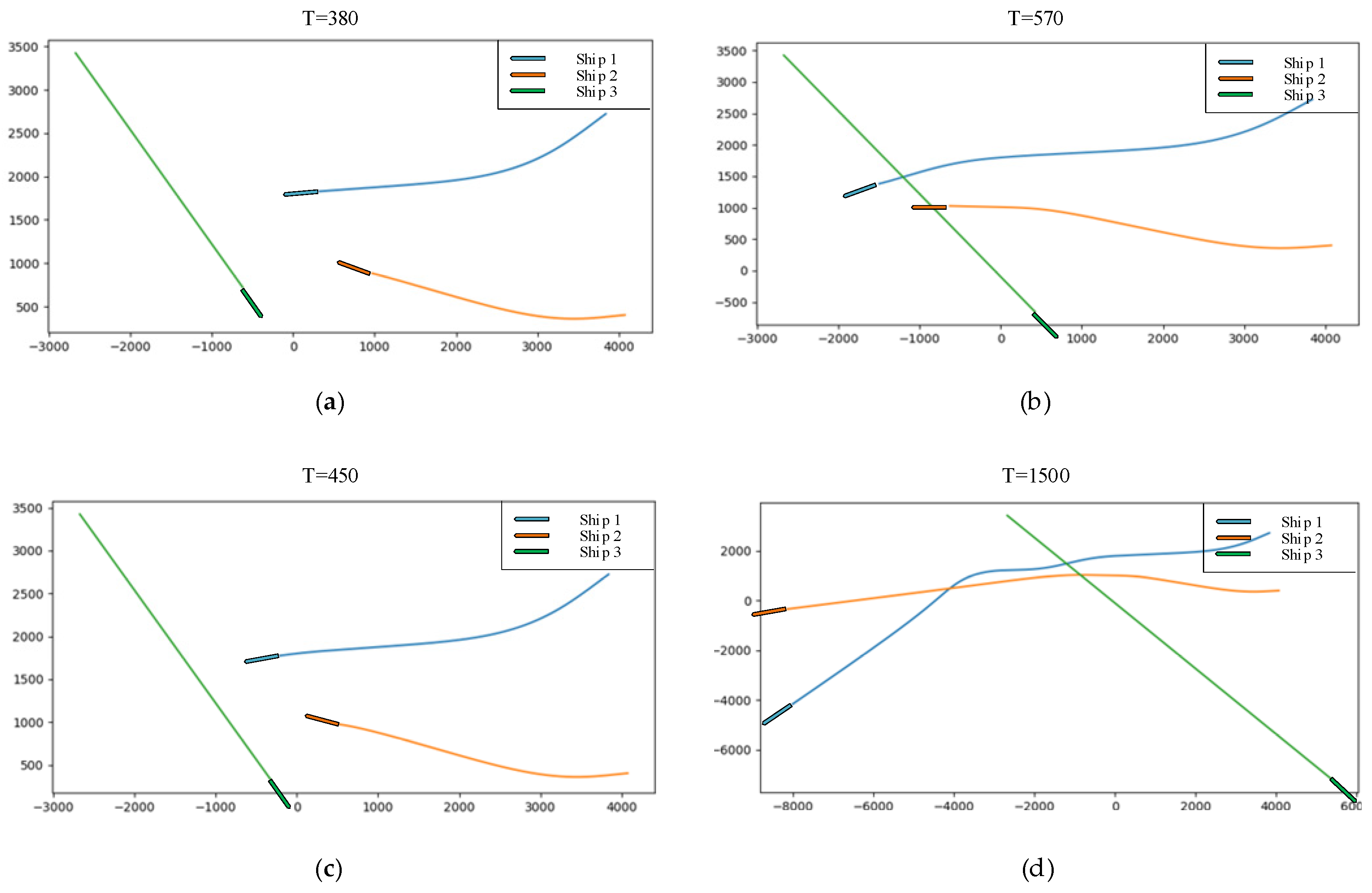
Figure 5.
Ship Trajectory in Scenario 2.
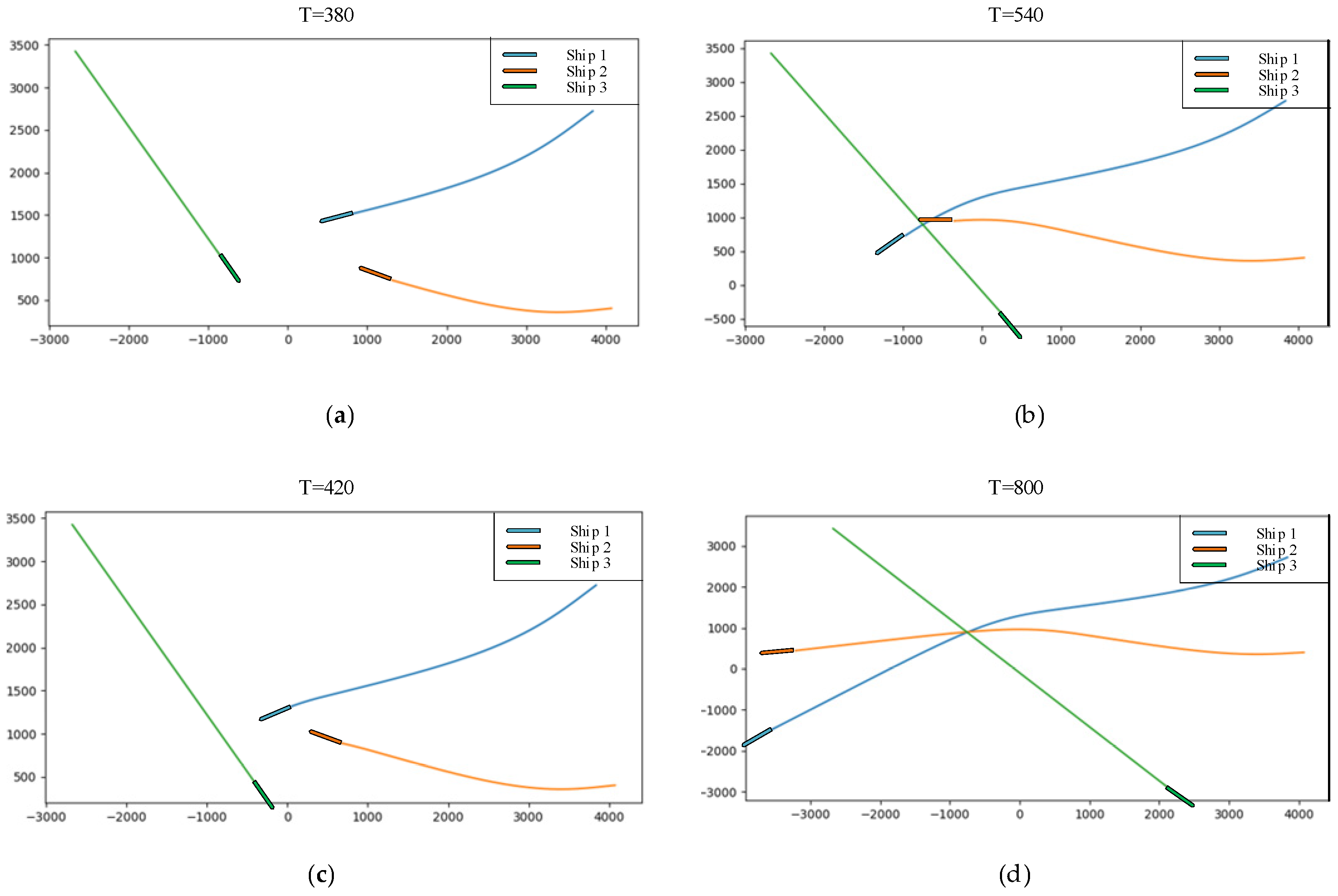
Figure 6.
Distance between Two Ships in Scenario 1.
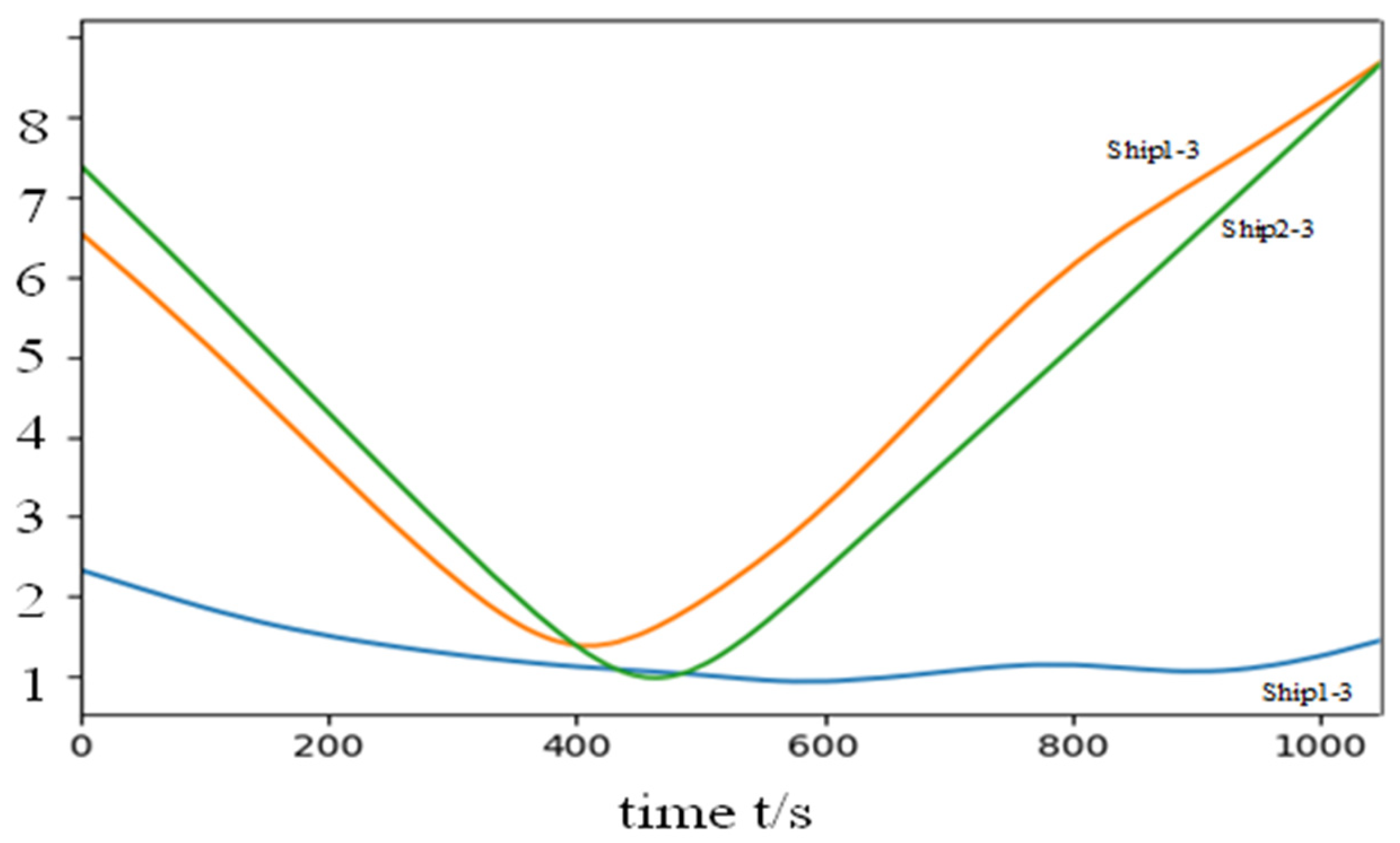
Figure 7.
Distance between Two Ships in Scenario2.
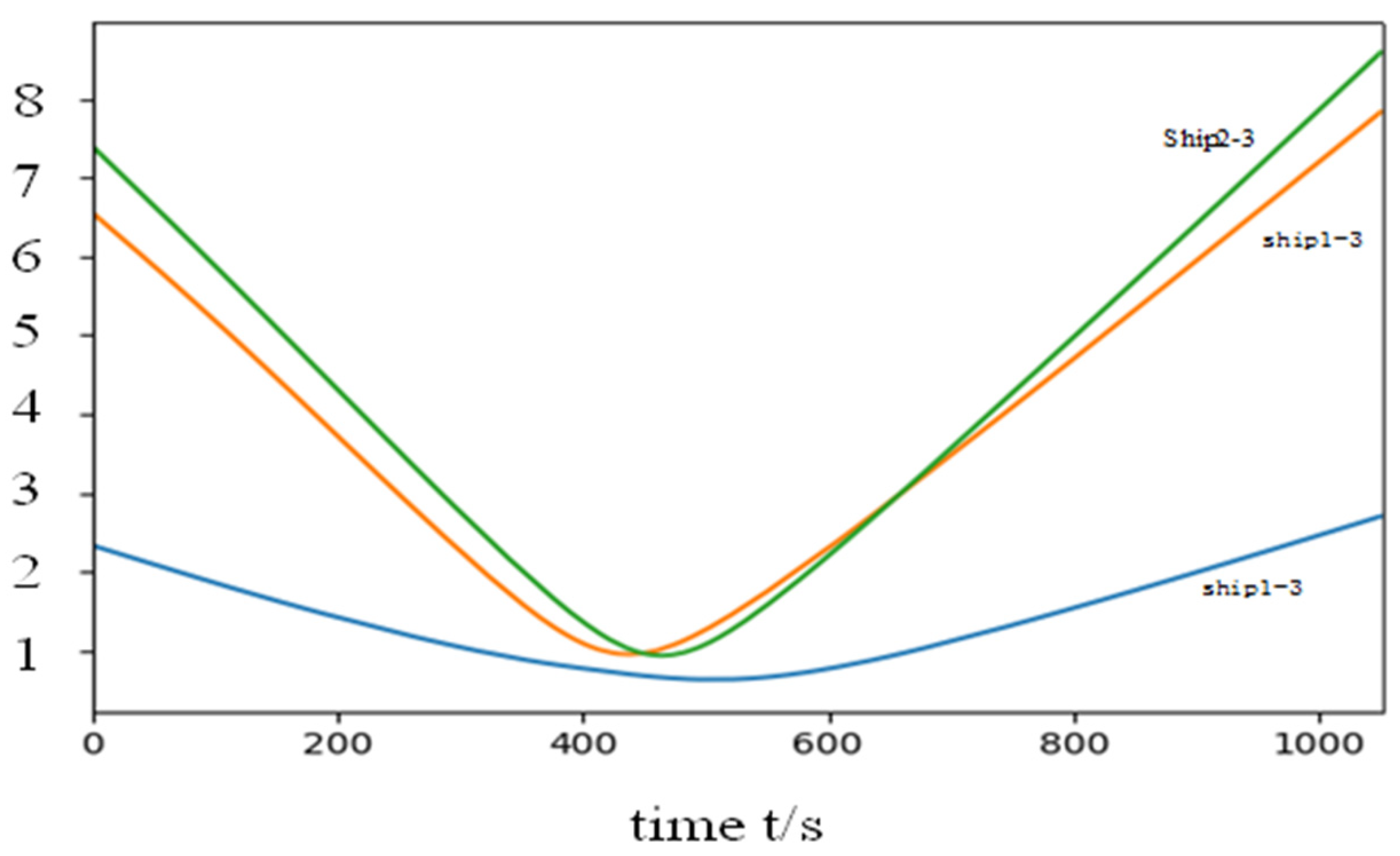
Figure 8.
Rudder angle variation in scenario 1.
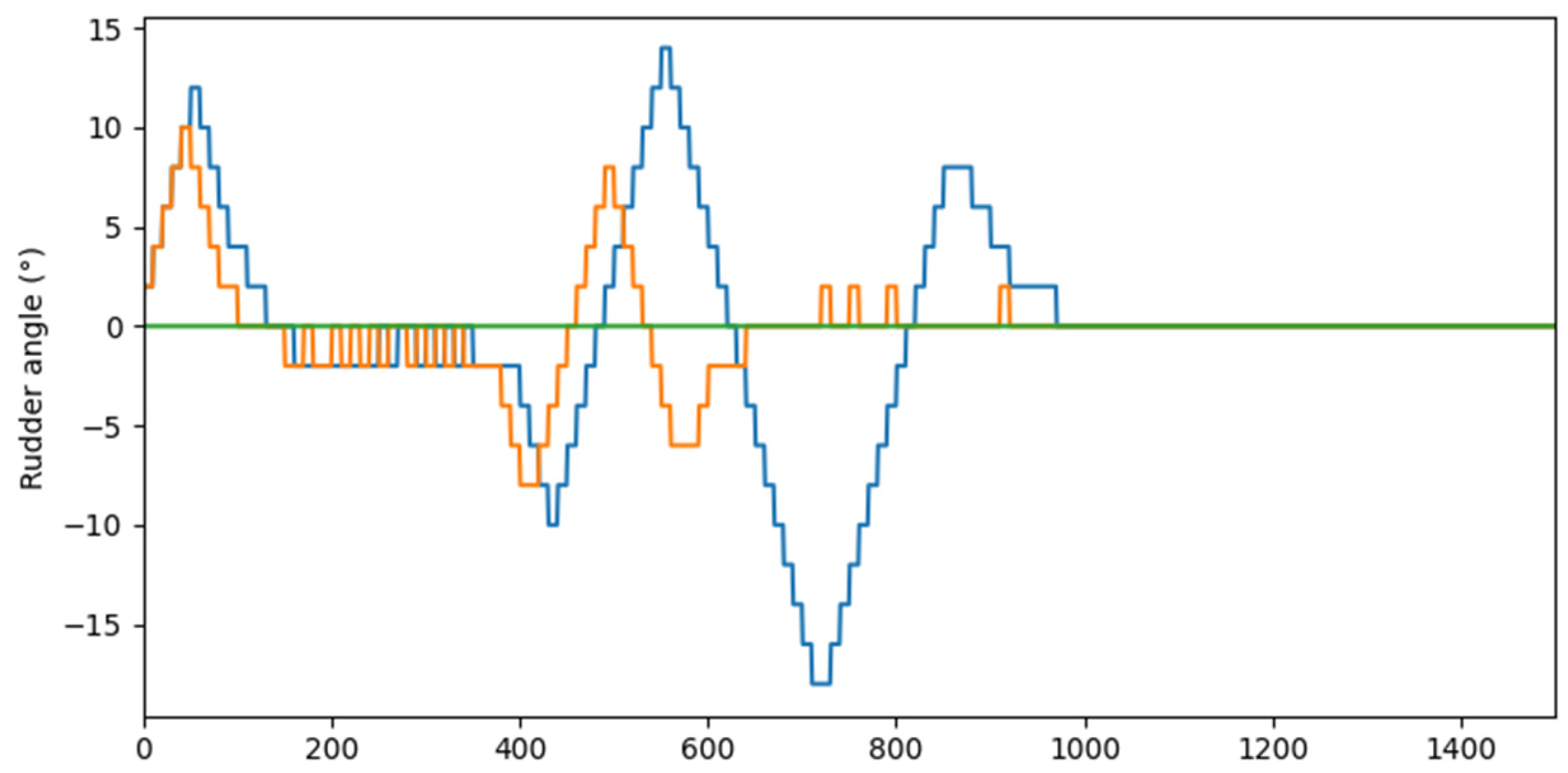
Figure 9.
Rudder angle variation in scenario 2.
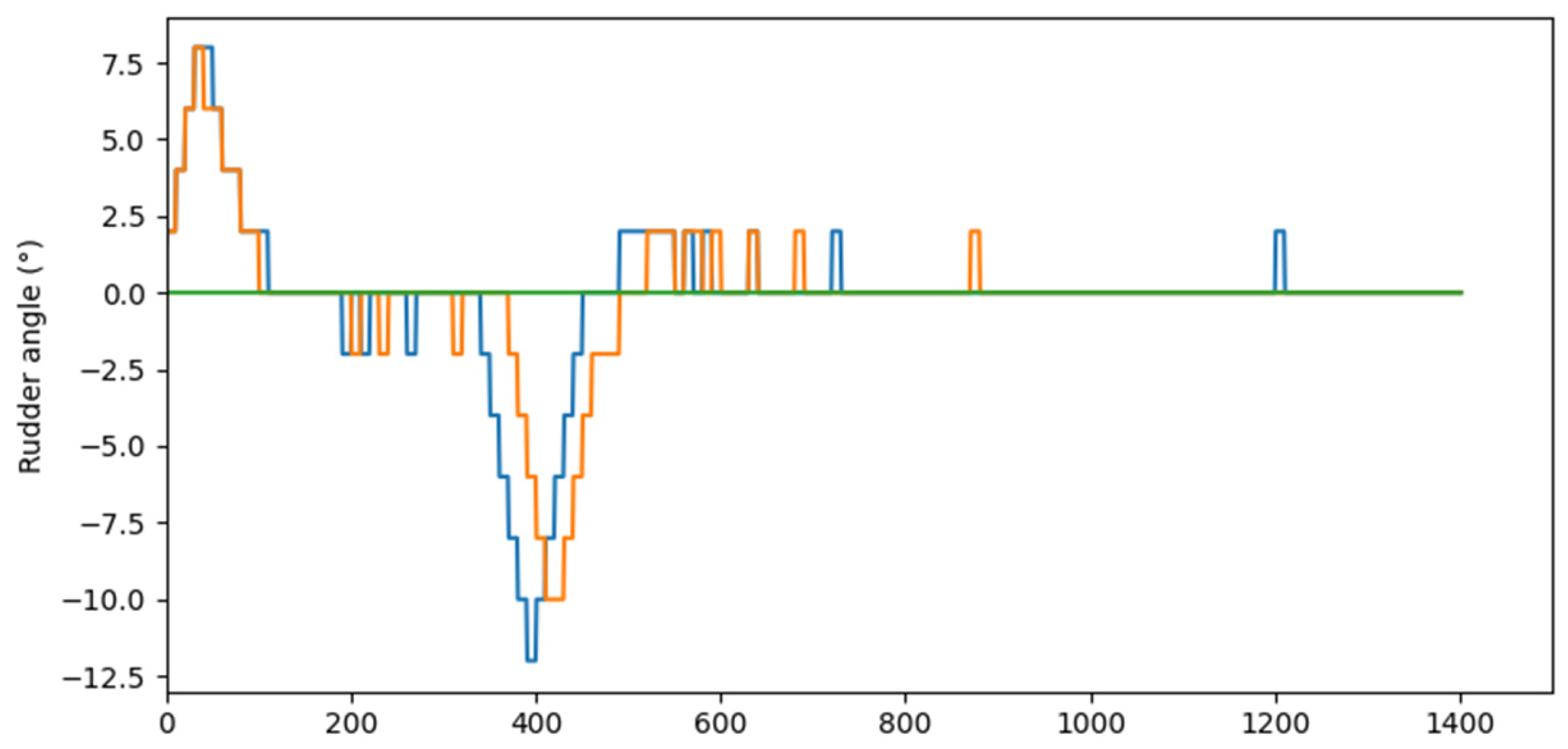

Table 1.
Initial Parameters.
| Parameter | Abscissa x/m | Ordinate x/m | Course c/(°) | Speed v/kn |
| 1 | 3839.1 | 2722.9 | 234.7 | 9.7 |
| 2 | 4074.1 | 4.2 | 264.2 | 8.2 |
| 3 | -2573.4 | 3425.1 | 142.8 | 8.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



