
Submitted:
21 May 2024
Posted:
21 May 2024
You are already at the latest version
Abstract
Based on the need for real-time sag monitoring of Overhead Power Lines (OPL) for electricity transmission, this article presents the implementation of a hardware and software system for online monitoring of OPL cables and cable sag determination. The mathematical model based on differential equations and the methods of algorithmic calculation of OPL cable sag are presented. Considering that, based on the mathematical model presented, the calculation of OPL cable sag can be done in different ways depending on the sensors used, and the presented application uses a variety of sensors. Therefore, a direct calculation is made using one of the different methods. Subsequently, the verification relations are highlighted directly and, respectively, the calculation by the alternative method, which uses another group of sensors, to generate both a verification of the calculation and the functionality of the sensors, thus obtaining a defect observer of the sensors. The hardware architecture of the OPL cable online monitoring application is presented, together with the main characteristics of the sensors and communication equipment used. The configurations required to transmit data using the ModBUS and ZigBee protocols are also presented. The main software modules of the OPL cable condition monitoring application are described, which ensure the monitoring of the main parameters of the power line and the visualisation of the results both on the electricity provider's intranet using a web server and MySQL database, and on the Internet using an Internet of Things (IoT) server. This categorisation of the data visualisation mode is done in such a way as to ensure a high level of cyber security. Starting from the mathematical model of the OPL cable sag calculation, it goes through the stages of creating such a monitoring system, from the numerical simulations carried out using Matlab to the real-time implementation of this monitoring application. The main modules of the application software are: the software module for reading quantities from the sensor network through a ModBUS Input/Output (I/O) server, the software module for real-time calculation of the OPL cable sag, the software module for read/write operations based on MySQL type data, the software module for transferring data to the user's intranet through a web server, and the software module for viewing data by authorised users based on user and password through an IoT server. The development software environments used are Matlab and Laboratory Virtual Instrument Engineering Workbench (LabVIEW).
Keywords:
Cable sag
; ZigBee
; ModBUS
; Web server
; IoT.
1. Introduction
Optimising the operation of high-voltage overhead lines and ensuring their operational safety is essential, whether the power lines are old or new, and regardless of weather conditions. The most modern solution for controlling and optimising the operation of overhead power lines requires the use of intelligent networks based on systems for on-line monitoring of operating parameters and conditions. In the context of smart grids, energy efficiency refers to reducing the congestion and operational losses of high-voltage overhead lines, increasing their operational safety and reducing the need for investment in new overhead lines. To maximise energy efficiency, it is necessary to ensure the controllable and efficient operation of overhead lines of different voltages. [1,2].
An intelligent electricity transmission network should have, in addition to energy-efficient power lines, on-line control and monitoring systems necessary to achieve efficient programming of the operation and coordination of electricity transmission needs in relation to the technical condition of power lines and primary electrical equipment in high-voltage power stations, and environmental conditions. In the process of transporting electricity through electrical networks, the quality of the cable essentially sets the limit of the load capacity. In order to prevent overloading, the designed nominal load capacity of the transmission line is set as a fixed value quantity, taking into account the most unfavourable meteorological conditions. Normally, however, such unfavourable weather conditions are rare, so the transmission potential of cable power is not used to its maximum in most cases [3,4].
The need to monitor and assess the condition of power transmission lines in real time as accurately as possible is obvious. The problem, then, is to develop specific and efficient calculation algorithms on the basis of the descriptive equations for calculating cable sag, and then, for real-time implementation, to use a set of suitable sensors together with a communication system that allows the data to be transmitted to a central server that performs the usual operations of displaying the state of the monitored line, but also integrates with the local Supervisory Control and Data Acquisition (SCADA) system [5,6,7,8].
As a result, a number of systems have been developed to monitor the condition of power transmission lines, where the calculation of cable sag is of particular importance. Among the specific elements presented in the scientific literature, we can mention: monitoring based on a network of wireless sensors [9,10], the creation of a data communication system based on Long Range (LoRa) [11], the monitoring of power lines using chirped fibre Bragg grating [12,13] and the realisation of a power line monitoring system based on Differential Global Positioning System (DGPS) [14].
This article is a continuation of [15] and presents the implementation of a hardware and software system for online monitoring of OPL cables and determination of cable sag. Starting from the mathematical model of the OPL cable sag calculation, it goes through the stages of creating such a monitoring system, starting with the numerical simulations carried out using the Matlab programming environment [16,17] and continuing with the real-time implementation in the LabVIEW programming environment [18,19] of this monitoring application.
In the paper presented, the line slope method has been used in principle, where based on the detection of the OPL cable slope angles, sag value can be obtained to which, in order to obtain an alternative verification relation, the measurement of the mechanical cable stress is also used, thus achieving increased accuracy and redundancy without significant burden on the hardware system. Table 1 summarises the methods, advantages and disadvantages of previous work.
The logical chain of the software elements is based on the Matlab environment for the numerical simulations, while for the real-time implementation the LabVIEW development environment is used, which is suitable for the global integration of the system including Matlab scripts for calculations, but also the integration of a MySQL database, a web server and an IoT server. Thus, the main contributions of this article are as follows:
- Establishing alternative calculation methods and verification calculation relations for the OPL cable sag calculation depending on the groups of sensors used, thus obtaining a software method for detecting the failure of a sensor, a method whose usefulness can be expressed in terms of increasing system reliability;
- Establishing the hardware and software architecture of the OPL online cable monitoring application;
- Implementation of the software module for reading quantities from the sensor network through a ModBUS I/O server;
- Implementation of the software module for the real-time calculation of the OPL cable sag and monitoring of the parameters of interest of the power line, including the correct functioning of the sensors and maintenance within the acceptance limits of the OPL cable sag values;
- Implementation of a software module to send automatic e-mails with warnings and alarms regarding OPL cable sag limits and sensor faults;
- Implementation of the software module for viewing data by authorised users, based on user and password, via an IoT server [25].
The rest of the article is structured as follows: Section 2 presents the cables and the calculation. The general architecture of the overhead power line cable monitoring system is presented in Section 3, and software applications for overhead power line cable monitoring system and cable sag calculation are presented in Section 4. Some conclusions and suggestions for further developments are presented in the final section.
2. Cable Sag Calculation
This section presents the method of calculating the sag of the power cable of overhead power lines, the simplified geometry of which is shown in Figure 1. The location of the xOy plane coordinate system at the base of the left pole is observed, and the main notations used are presented below. The angles formed by the tangent of the cable at the ends with the axis of the Ox are denoted by θ0 and θ1, whose measure is given in degrees, and the difference between the poles, the cable rise h, is measured in metres. The weight of the cable, measured in N, is written as G, the weight/length of the cable, measured in N/m, is written as w, and the length of the cable, l is measured in metres. Also, the projection of the mechanical cable stress on the Ox axis (horizontal component) is denoted by H, and (x*, y*) are the coordinates of the lowest point of the cable measured on the Oy axis, as shown in Figure 1 [15,26].
To calculate the sag of the cable in the structure of the overhead power lines, the catenary equation is used, which can be derived in a simplified way from Figure 2. Thus, in Figure 2, using the usual notation, an infinitesimal part of the cable is shown which is considered to be inextensible in a first approximation, after which the following sections describe certain corrections that can be made to increase the accuracy of the calculations, due to the fact that in reality the cable will undergo contraction or expansion as a result of variations in the ambient temperature or the electrical load on the line. Figure 2 also shows the vector decompositions of the main forces that occur in the cable where the gravitational load is applied.
The balance equations can be written on the horizontal and vertical axes in equations (2) and (3) using the notations (1), where s is the coordinate of the length of the cable.
For the equilibrium on the vertical axis Oy, we get the following:
For the equilibrium on the horizontal axis Ox, we get the following:
In relations (2) and (3), the mechanical stress in the cable is denoted as . By integrating equation (3), we obtain equation (4).
In equation (4), H is the integration constant and, as there is no horizontal force acting on the cable, is equal to the horizontal component of the mechanical cable stress.
From equation (4) we obtain that , and noting (the weight per unit length) from equation (2) is obtained after multiplying both members with the following equation:
Given the fact that ds is infinitesimal, the following geometric relation can be written:
Based on this, equation (5) can be described in the form:
To simplify the writing of the equations, the following notation is introduced . Thus, the following equation is obtained
Integrating relation (8), the following relation is obtained:
where K1 represents an integration constant.
Next, the substitution is made and by exponentiating the relationship (9) the following relation is obtained:
Squaring equation (10), and subsequently solving for a, results in the following form:
The integration of equation (11) gives the following form:
where K2 represents another integration constant.
The differential form of equation (12) can be written as follows:
The following relationship can be used to calculate the length of the cable:
After a series of calculations, equation (15) explicitly gives the length of the cable:
The following expression can also be written from Figure 1:
The equation (19) can be used as an alternative calculation equation, given that x* and y*, which characterise the length of the arrow, can be calculated according to the horizontal mechanical stress, which can be provided directly by a mechanical stress sensor, or with the help of two inclination sensors providing the angles θ0 and θ1 from the equation (19). Depending on the economic constraints, the system can be equipped with either one or both options for determining the horizontal mechanical stress H. It can therefore be concluded that by verifying the complementary relationship to determine the horizontal mechanical stress H, the functional state or fault of the sensors involved can be directly checked when calculating the cable deflection. The result is a software-based method of detecting sensor faults, which can increase system reliability.
For the particular case of xA = 0, yA =0, xB = h, yB = L, equations (13) and (14) can be found as a graphical representation in Figure 1.
According to [15,26], after determining the points (x*, y*), in addition to checking the correctness of the calculations for the cable sag value, the following relationship must also be checked:
Figure 3 presents the Matlab implementation in the form of an algorithm to obtain a thorough numerical simulation of the cable sag value and its position on the horizontal axis between the two pillars as described by the equations above.
Therefore, for the numerical simulations presented below, the sag calculation for the OPL cables is used as a first example for a set of data presented in Table 2.
Figure 4 shows the result of the numerical simulation for the graphical representation of the determination of the OPL cable sag value for the input data given in Table 3, using the algorithm performed in Matlab and shown in Figure 3.
Table 3 shows the numerical simulations for another set of data in the case where the two pillars are positioned differently on the Ox axis.
3. General Architecture for Overhead Power Line Cables Monitoring System
The implementation of the proposed hardware system and software applications for data acquisition and transmission for the online monitoring system of OPL cables is based on the ModBUS and ZigBee protocols. The ModBUS protocol is a communication protocol based on a master-slave or client-server architecture, and the main purpose of the ModBUS protocol is to facilitate stable and fast communication between the slave hardware subsystem in the ZigBee wireless network and the sensors in the subsystem component OPL cable monitoring hardware. ZigBee, as described in the IEEE 802.15.4 standard, is a low bit rate data transfer protocol for Wireless Personal Area Networks (WPAN). It is designed for easy connection between devices, keeping power consumption to an optimum minimum. The ZigBee network is self-organising, requiring minimal user or administrator intervention during initial configuration. Further intervention is only required in major problem situations where a very large number of nodes fail, or where running configurations are deleted and reset [20,21]. The hardware/software configuration for data transmission in order to monitor, analyse and diagnose OPL cables is presented in Figure 6. Also, the proposed and realized variants of the communication architectures for “Analog value Modbus RTU stage” and for “Modbus RTU-ZigBee” are not fully redundant, and the purpose of the introduced redundancy is also based on a study of the requirements of the potential beneficiaries (electricity transmission companies).
3.1. Description of the Sensor Network for the Overhead Power Line Cable Monitoring System
Each sensor can be parameterised using a hardware/software module that interfaces between the sensor and the general software application using the ModBUS communication protocol. Each sensor is therefore assigned an ID and the read/write functions specific to the ModBUS communication protocol make it possible to read the data provided by the sensors in real time, as well as their parameterisation. The software applications developed for the online monitoring subsystem of the OPL cables are implemented using the ModBUS protocol and involve writing software functions for each sensor to set minimum and maximum values, various thresholds and state values.
Figure 7 groups some images representing aspects of the implementation phase of the hardware modules in order to realize the OPL cables monitoring system. Thus, Figure 7 (a) shows the measurement sensors that provide the instantaneous status of the cable, namely: temperature, tilt, vibration, communication module for integration into the ZigBee network, and a specialized electronic circuit performs filtering and voltage stabilization of the components. Figure 7 (b) presents the power supply system of the cabinet located on the OPL cables consists of two split core current transformers SCT045B-type, which transform the energy radiated by the electric cable on which it is mounted (up to 1000A and 400kV), at the output of the transformer obtaining a power of 10VA. Also, Figure 7 (b) shows the sensor for measuring the value of the current through the cable represented by a Hall split core current transducer. The power system of the cabinet located on the pillar consists of 200W solar panels and 153Wh buffer battery. Figure 7 (c) shows the implementation of the power line pillar hardware module cabinet. The climatic conditions (wind and ice) sensors implementation is shown in Figure 7 (d).
The following are some of the characteristics of the sensors shown in the implementations in Figure 7. Thus, the inclinometers used to measure the pitch and roll angles of the OPL cables are the DAS-90-A from Level Developments [27]. They use a micro-electro-mechanical systems (MEMS) sensor in a rugged, sealed aluminium structure with a 2m shielded polyurethane (PUR) cable and a 4-pin M12 connector. The sensor is powered in the range 7÷32VDC and the measured angle is in the range −90° to 90°. The sensor output is analogue 0.4÷5V, and the measurement accuracy is ±0.34°. The sensitivity for the first measuring interval of 1° is 35mV/° and for the interval 0÷1g it is 2V/g. With regard to the change in sensitivity of the sensor with temperature, an error correction is applied, given by the relationship:
where Esd is the output variation in degrees corresponding to the sensitivity with temperature, SD is the significance corresponding to the ±0.003%/°C drift, ∆T is the temperature change interval in °C, and θ is the current angle in degrees (°) and is provided by the inclinometer (tilt) sensor.
Similar to the correction equation (22), each sensor allows the implementation of similar equations in the OPL cable calculation software application.
The PT100 sensor is a temperature sensor for the range -50÷400°C with an accuracy of 0.2% and a drift of less than 0.04%. The material used to manufacture this type of sensor is tetrafluoride silver-plated wire and stainless steel. The conversion to the analogue quantity 0÷5V is provided by a module type HIC-PT100.
The Recovib IAC-CM-U-03 sensor from Micromega Dynamics [28] is used to measure OPL cable vibration. It has a measurement sensitivity of 40mV/g over a range of −50 to 50g and a drift offset of ±50mg/°C. This sensor provides an analogue output of 0 to 5V.
To measure the current through OPL cables, a Hall split-core current transducer type THST45A is used, which provides a measuring range of up to 1200A. The analogue output of this type of transducer is 0÷5V.
The sensors presented above are connected to the ICP DAS tM-AD8 hardware module, which converts analogue inputs into digital outputs on the ModBUS RTU protocol on the RS-485 interface. The command line tool software interface can be used to test and debug the calibration and configuration modules using ModBUS Remote Terminal Unit (RTU) and DCON protocol commands. Figure 8 shows the basic configuration of the analogue input to ModBUS RTU hardware module.
The communication settings of the Analogue Input to ModBUS RTU hardware module are presented below. Figure 9 (a) shows the communication parameter settings. The ModBUS data format settings are shown in Figure 9(b) and the analogue channel data format settings are shown in Figure 9(c).
The interface and software configuration of the other sensors, i.e. the OPL cable mechanical force sensor, the pole inclination measurement sensor, the vibration sensor and the sensors included in the weather station installed on the pole, as well as their integration into the ModBUS network for data transmission to the server, is carried out in the same way as described above. The characteristics of the sensors that will be installed on the pole are presented below.
The sensor that measures the inclination of the pole is of the SOLAR-2 type from Level Developments. The sensor is powered in the range 9÷30VDC, and the measured angle is in the range −45° to 45°. The sensor output is ModBUS type and the measurement accuracy is ±0.040° at a temperature of 10°C. The sensitivity for the first measurement interval is ±0.0006%/°C and the correction for the change in sensitivity of the sensor with temperature is given by equation (22). The ModBUS registers adresses of the SOLAR-2 type inclinometer sensor are presented in Table 4 [27].
The accelerometer type sensor used to measure the vibration of the OPL cable poles is the HWT605-485 from WIT Motion and is a device with an Inertial Measurement Unit (IMU) sensor [29]. This type of sensor measures accelerations in the range of −6g to 6g and has a measurement accuracy of 0.01g. The sensor integrates into the local ModBUS communication network with the default ID 0x50.
A versatile load cell, the DCL10 Central Load Cell is used to measure mechanical stress in the cable. This nickel-plated sensor is manufactured from alloy steel and is IP67 rated for outdoor use. The non-linearity is 0.03% of the full scale value. A signal conditioner provides the measured value both in a unified 4÷20mA; 0÷10V signal and as a ModBUS protocol on the RS-485 interface. By default, on the local ModBUS network, the sensor ID is 0x04, and the address of the provided size is 57H and 58H [30].
3.2. Description of the ZigBee Network for the Overhead Power Line Cable Monitoring System
The ZT-2550 and ZT-2551 series modules are small wireless ZigBee converters based on the IEEE802.15.4 standard, which allow the RS-232 and RS-485 interfaces to be converted into a ZigBee Personal Area Networks network (PAN) [21,22]. The typical transmission distance of ZT series ZigBee devices is 700 metres, with a transmission frequency range of 2.405GHz to 2.48GHz, divided into 5MHz sectors, providing 16 channels and 16384 PAN IDs. The ZT-2000 Series is not only a long range wireless converter, it can also act as a ZigBee router to extend the range and improve the quality of the wireless signal. In a ZigBee network, there is only one ZigBee host, known as the 'ZigBee Coordinator', and ZT-2570 Series devices are used to initiate and control routing. Furthermore, a single ZigBee network can manage up to 255 ZigBee routers and is responsible for receiving or bypassing data.
Features: Industrial, Scientific, and Medical (ISM) 2.4GHz operating frequency, compatible with IEEE802.15.4/ZigBee, adjustable RF transmission output power, support AES-128 encryption for wireless communication, RS-232/RS-485 interface, source identification for data transmission of device without address, supports broadcast transmission for redundant transmission path, supports unicast transmission to reduce network load, and supports topology utility for network monitoring and improvement. The ZT-2000 Series Topology Utility configuration software is used to configure ZigBee networks. Therefore, Figure 10 shows the configuration of the ZigBee network integrated into the application software of the OPL cable monitoring system.
3.3. Description of the GSM Communication of the Overhead Power Line Cable Monitoring System
According to Figure 6, the data acquired by the network of sensors presented in the previous section are collected in a unified manner on the ModBUS protocol in a local gateway, which will transmit them to the application server of the OPL cable monitoring system on the 3G/4G protocol. An industrial GSM/General Packet Radio Service (GPRS) gateway board TRB145 is used, equipped with an RS4-85 interface, digital inputs/outputs and a microUSB port. It has a wide range of software features including SMS control, firewall, OpenVPN, IPsec, RMS and FOTA support. Hardware features: Mobile LTE (Cat1)/3G/2G, SIM slot Mini SIM (2FF), 1xSMA antenna connector for GSM, RS485 Full Duplex (4 wire) and Half Duplex (2 wire), transmission speed 300÷115200, input/output 2xI/O digital/analog (configurable), CPU ARM Cortex-A7 CPU 1.2GHz, RAM-type memory 128MB, flash-type memory 512MB, power supply 9÷30VDC, power consumption 5W, and configuration interface: virtual NIC via Micro-USB connector. Software Features: Linux OS with Yocto SDK, Network NAT, Firewall, Dynamic Domain Name System (DDNS), RS-485 ModBUS, Serial over Internet Protocol (IP), and Networked Transport of Radio Technical Commission for Maritime Services (RTCM) over Internet Protocol (NTRIP) related services [31].
Figure 11 shows an example of the software configuration of the GSM gateway hardware module for reading data from the ModBUS slaves: ZigBee coordinator and inclinometer type sensor. The programming of the GSM gateway hardware module ModBUS functions for the inclinometer type sensor and the ZigBee coordinator are shown in Figure 12 and Figure 13.
4. Software Applications for Overhead Power Line Cables Monitoring System and Cable Sag Calculation
This section presents the architecture of the software application that allows the calculation of the OPL cable sag based on the measurements provided by the sensor network, together with the storage of the results in a database to create a history, as well as the presentation of the data on the intranet through a web server or on the Internet through an IoT. The application software also allows integration with the user's SCADA system, which is usually that of an electricity wholesaler. SCADA is one of the modern tools used to control and monitor technological processes. The main components of SCADA systems are one or more servers and clients. The servers used in this system are of the Open Platform Communications (OPC) type, which aims to define a common interface that requires only one design stage and then multiple reuses for any other SCADA project or other software packages [23,24,25].
Next, this section presents the software application, based on an NI-OPC server provided by National Instruments, which can be integrated into a SCADA-type system and which performs the following functions: monitoring - the process of monitoring the state of the OPL cables and the management of client-server communication of quantities through online viewing and creation of records using TDMS (Technical Data Management Streaming) type files. A MySQL database server is used with data write/read applications from the OPL health monitoring process cables. The data from the OPL cable condition monitoring process is displayed over the intranet/internet network via a web server embedded in the application, along with the presentation of a software application that transmits the data to an IoT-type cloud platform.
The software application for the OPL cable condition monitoring process is developed in the LabVIEW graphical programming environment, a programming environment that incorporates all of the concepts listed above and the most common industrial process control techniques. The software application modules of the OPL cable condition monitoring process on the server computer shown in Figure 14 are as follows:
- The LabVIEW software module application client for reading values from the sensor network via a ModBUS I/O server;
- Matlab and LabVIEW software module application for real-time calculation of the OPL cable sag;
- LabVIEW software module client application for writing to and reading from the MySQL database;
- LabVIEW software module client application to send automatic e-mails with warnings and alarms about OPL cable sag limits and sensor faults;
- LabVIEW software module client application for data transmission on the electricity wholesaler's intranet via a web server;
- LabVIEW software module client application for viewing data by authorised users, based on username and password, through an IoT server.
National Instruments provides three main mechanisms for interfacing with ModBUS devices: an OPC server, a ModBUS I/O server, and a ModBUS Application Programming Interface (API) integrated into the LabVIEW programming environment through LaVIEW Real-Time or the LabVIEW Datalogging and Supervisory Control (DSC) modules. Modbus I/O servers provide a high-level engine for ModBUS communication, and to use this type of server, a new I/O server is added from the LabVIEW library to the target built in the application project [18,19,24]. Figure 15 shows the configuration mode for a LabVIEW software project based on the ModBus I/O Server for reading real-time data from inclinometer sensors. Figure 16 shows how the LabVIEW application reads data from inclinometer-type sensors via a ModBus I/O server. The LabVIEW software block diagram is shown for the real-time calculation of the OPL cable sag calculation in Figure 17.
A MySQL Server type database server is used to store the data to create the data log. It is responsible for storing data, finding it efficiently on the basis of queries defined by the client, but also for handling the different levels of security required in the normal work with this data. MySQL is an Open Source database server. It is a relational database management system based on the client-server model using the SQL language. MySQL's features include: multi-threaded and multi-processor operation, functionality on a wide range of operating systems, support for large databases, and a high level of security based on a flexible and secure system of passwords and privileges [23,24,25]. The use of Open Database Connectivity (ODBC) makes it easy for the OPL cable condition monitoring process application program to write to and query the MySQL server database. Figure 18 shows the configuration of the ODBC connection between the software application developed in LabVIEW and the MySQL server database.
Figure 19 shows the LabVIEW software block diagram of the application client software module for writing to the MySQL server-type database and the graphical interface of this process. Thus, in this figure are presented the usual stages of this process, namely, opening the MySQL server and LabVIEW ODBC connection, inserting data into the MySQL database, and closing the connection.
Figure 20 shows the MySQL Database Workbench interface for the creation and primary visualisation of the MySQL server tables used in the OPL cable condition monitoring process. Table presents data on: cable left tilt [°], cable right tilt [°], cable run L [m], cable weight G [N], cable rise h [m], cable mechanical stress H [kN], cable weight/length w [N/m], and (x*, y*) sag values point.
An example of selecting the MySQL server database using the Read Client Software Mode application program written in LabVIEW is shown in Figure 21 (a). Also, the software interface displaying the result of the MySQL database selection is presented in Figure 21 (b).
The system can also automatically send warning e-mails to pre-defined addresses if the cable sag value is outside the pre-defined safety limits, or if a fault is detected in one of the sensors as a result of the checks carried out in parallel with the cable sag value, as described in Section 2. In Figure 22, by utilizing the automatic ActiveX functions such as a server and support for ActiveX Containers and ActiveX Events to employ the Simple Mail Transfer Protocol (SMTP) service for the Gmail-type e-mail server [24], the software block diagram demonstrates the client application for generating automated e-mail.
Normally, the results of the OPL cable condition monitoring software application are visible on the computer of the intended user, in this case an electricity transmission operator, but by using a web server, the data can be viewed within the operator, thus ensuring a higher level of security for the application. Thus, a web client can exchange data with a stand-alone application developed in the LabVIEW programming environment over a network (Intranet/Internet) via LabVIEW Web Services. Such a Web service consists of Virtual Instruments (VIs) and other files running on a server that responds to Hypertext Transfer Protocol (HTTP) requests from clients. A Web client, such as a browser, exchanges data with a Web service by sending an HTTP request to a specific Uniform Resource Locator (URL) address, whereas the LabVIEW embedded Web server maps a URL to each HTTP VI method, so that the specific URL used by the client determines which HTTP VI method receives and resolves the HTTP request. The request contains values for assigning specific parameters in the HTTP GET method, and after each request, the HTTP GET method processes these values and returns a response [24,25].
The application program for the OPL cable health monitoring process uses URLs and HTTP methods to pass real-time data to the controls in the connector panel based on the Web VI method, and to pass values with the post data role using the HTTP POST method. The HyperText Markup Language (HTML) code allows for all the visual aspects of the Web page and is similar to the front panel, which contains indicators and graphs to display the results. It also uses JavaScript code for this purpose. Communication between the LabVIEW application and JavaScript is through a LabVIEW Web Service Request, which is a service in the LabVIEW environment. This allows for the creation, writing and reading of global variables to achieve the above objectives, as shown in Figure 23.
The web service is configured to return data in JavaScript Object Notation (JSON) format, which makes it very easy to load it as an object in JavaScript. This software procedure is performed by the JSON.parse function, which is available in Web browsers. JSON is very similar to cluster data in the LabVIEW programming environment. In a JSON object, each context has a key. In a LabVIEW cluster, each element can have a name, making it easy to modify clusters using the unbundle/bundle by name functions. This application will use a function that converts LabVIEW clusters to JSON objects. The function converts the element name of each cluster into a JSON key. Clients use URLs and HTTP methods to pass data directly to controls in the OPL cable condition monitoring process, to connect to HTTP VI methods, and to send values as POST data using the HTTP POST method. The URL that web clients use to exchange data with HTTP VI methods is based on several values that are determined when a LabVIEW web service is created. In a LabVIEW cluster, each element can have a name, making it easy to modify clusters using the unbundle/bundle by name functions [24].
As for the testing of the proposed monitoring system is shown in Figure 24, it was done under quasi-real conditions in our own laboratory (High Voltage Laboratory), where the maximum distance between two pillars is less than 40 m and the height up to 30 m.
For example, for the measurement of OPL cables sag in at-the-edge conditions, as shown in Figure 24, using real-time calculation software, the sag value (x* = 14.07m and y* = −1.76m) is obtained as in Figure 23. Using the offline software presented in Section 2, for the same conditions the value of the sag (x* = 14.06m and y* = −1.75m) is obtained. Also, a physical measurement using a theodolite measuring system can obtain the exact value of the cable sag which in this case is (x* = 14.062m and y* = −1.758m). A very small error is observed in the use of offline and real-time software in the calculation of the cable sag, compared to a value considered as standard obtained by other means. The difference between the values provided by the offline software and the real-time software is due to the rounding of the values transmitted during the communication between the sensors and the real-time system. In any case the differences are negligible compared to the overall requirements imposed on the system. Since under laboratory conditions, real operating conditions (wind, rain, ice and temperature differences over a wide range) can only be simulated for very short periods of time, in real operation to improve the measurement accuracy of the system over time, the necessary corrections can be made using machine learning based software.
This OPL cable condition monitoring software application will use a function that converts LabVIEW clusters to JSON objects. The block diagram of the communication modules between the application program and the Web server integrated in LabVIEW is shown in Figure 25 (a). Figure 25 (b) shows the graphical interface available to a user from the electricity provider’s intranet to view the parameters provided by the OPL cable condition monitoring software application.
For greater flexibility in sharing data from the OPL cable monitoring process, an IoT context can also be used. This ensures that data can be viewed, analysed and processed in the cloud by authorised users who have been securely issued with a username and password by the central user within the electricity provider. The configuration of the monitored parameter fields of the OPL cables on a secure channel from the ThingSpeak IoT cloud platform is shown in Figure 26. It can be seen that on the channel created with the ID 2284751, the fields for the parameters have been configured as follows: cable left tilt [°], cable right tilt [°],cable mechanical stress H [Kn], and (x*, y*) sag values point.
The platform can be accessed from the LabVIEW programming environment using GET, POST, PUT or DELETE ontext commands. These commands represent HTTP requests and responses and are part of the Representational State Transfer (REST) architecture and are presented for this application in Figure 27. The block diagram of the LabVIEW client software module for writing OPL cable monitoring process data to the ThingSpeak IoT cloud platform is shown in Figure 27(a), and the IoT LabVIEW client software interface module is shown in Figure 27(b).
Viewing the data recorded in the form of charts on the ThinkSpeak IoT cloud platform with real-time data provided by the software application for the OPL cable monitoring process can be accessed using a user ID and password at the address "https://thingspeak.com/channels/22884751," as shown in Figure 28.
5. Conclusions
This article presents the implementation of a hardware and software system for on-line monitoring of OPL electricity transport parameters and determination of OPL cable sag. The mathematical model based on differential equations and the method of algorithmic calculation of OPL cables sag are presented. Given that, based on the mathematical model presented, the calculation of the OPL cable sag can be done in different ways depending on the sensors used, and the presented application uses a variety of sensors, a direct calculation is made through a method that follows the highlighted verification relationships directly, respectively the calculation through an alternative method that uses another set of sensors to generate both a verification of the calculation and the functionality of the sensors, thus obtaining a sensor fault observer.
The hardware architecture of the OPL cable online monitoring application is presented, together with the main characteristics of the sensors and communication equipment used. The configurations required to transmit data using the ModBUS and ZigBee protocols are also presented. Ontext are the main software modules of the OPL cable condition monitoring process application, which ensure the monitoring of the main parameters of the power line and the visualisation of the results both on the electricity provider’s intranet using a web server and a MySQL database, and on the Internet using an IoT server. This categorisation of data visualisation mode is done to ensure a high level of cyber security. The OPL cable sag calculation algorithms are presented in both simulated and real time. The development software environments used are Matlab and LabVIEW. The main modules of the application software are the following: the software module for reading quantities from the sensor network via a ModBUS I/O server, the software module for real-time calculation of the OPL cable sag, the software module for reading/writing from a MySQL type database, the software module client application for sending automatic e-mails with warnings and alarms regarding the limits of the OPL cable sag and sensor faults, the software module for data transmission on the wholesale electricity provider's intranet via a web server, and the software module for viewing data by authorised users based on user and password via an IoT server.
In future work, as a result of collaboration with users, data will be collected both from the presented application and from direct measurements in extreme climatic conditions (wind and ice) in order to make the necessary corrections using software based on machine learning. This is because the mathematical model cannot accurately reproduce the sag determination of OPL cables in these contexts.
Author Contributions
Conceptualization, C.-I.N. and M.N.; Methodology, C.-I.N. and M.N.; Software, C.-I.N. and M.N.; Validation, C.-I.N. and M.N.; Formal analysis, C.-I.N., M.N., D.S. and I.P.; Investigation, C.-I.N., M.N. and I.P.; Resources, C.-I.N., M.N. and D.S.; Data curation, C.-I.N., M.N., D.S. and I.P.; Writing – original draft, C.-I.N. and M.N.; Writing – review & editing, C.-I.N. and M.N.; Visualization, C.-I.N. and M.N.; Supervision, C.-I.N. and M.N.; Project administration, C.-I.N.; Funding acquisition, C.-I.N.
Funding
“This work was funded by European Regional Development Fund Competitiveness Operational Program, Project SMIS Code 156460” and partially funded by Installation of National Interest “System for generating, measuring and recording short circuit currents” - SPMICS.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
| OPL | Overhead Power Line |
| SCADA | Supervisory Control and Data Acquisition |
| LabVIEW | Laboratory Virtual Instrument Engineering Workbench |
| VI | Virtual Instrument |
| TDMS | Technical Data Management Streaming |
| WPAN | Wireless Personal Area Network |
| PAN | Personal Area Networks |
| RTU | Remote Terminal Unit |
| LabVIEW DSC | LabVIEW Datalogging and Supervisory Control |
| OPC | Open Platform Communications |
| API | Application Programming Interface |
| ODBC | Open Database Connectivity |
| MySQL | Relational database management system developed by Oracle that is based on structured query language |
| SMTP | Simple Mail Transfer Protocol |
| IP | Internet Protocol |
| DDNS | Dynamic Domain Name System |
| GSM | Global System for Mobile Communications |
| GPRS | General Packet Radio Service |
| RTCM | Radio Technical Commission for Maritime Services |
| NTRIP | Networked Transport of RTCM via Internet Protocol |
| HTTP | Hypertext Transfer Protocol |
| URL | Uniform Resource Locator |
| JSON | JavaScript Object Notation |
| HTML | HyperText Markup Language |
| REST | Representational State Transfer |
| IoT | Internet of Things |
References
- Alcayde-García, F.; Salmerón-Manzano, E.; Montero, M.A.; Alcayde, A.; Manzano-Agugliaro, F. Power Transmission Lines: Worldwide Research Trends. Energies 2022, 15, 5777. [Google Scholar] [CrossRef]
- Tarko, R.; Kochanowicz, K.; Nowak, W.; Szpyra, W.; Wszołek, T. Reduction of the Environmental Impact of Electric Field Generated by High Voltage Power Transmission Lines. Energies 2021, 14, 6388. [Google Scholar] [CrossRef]
- Fan, R.; Zeng, W.; Ming, Z.; Zhang, W.; Huang, R.; Liu, J. Risk Reliability Assessment of Transmission Lines under Multiple Natural Disasters in Modern Power Systems. Energies 2023, 16, 6548. [Google Scholar] [CrossRef]
- Gao, Q.; Wang, L.; Liu, Z.; Zhang, X. Comprehensive Evaluation Method of Distribution Network Planning Schemes Based on Spatial Information. In Proceedings of the IEEE International Conference on Power Science and Technology (ICPST), Kunming, China,, 05–07 May 2023; pp. 264–270. [Google Scholar]
- Ildarabadi, R.; Zadehbagheri, M. New Technology and Method for Monitoring the Status of Power Systems to Improve Power Quality—A Case Study. Processes 2023, 11, 2468. [Google Scholar] [CrossRef]
- Liubčuk, V.; Radziukynas, V.; Naujokaitis, D.; Kairaitis, G. Grid Nodes Selection Strategies for Power Quality Monitoring. Appl. Sci. 2023, 13, 6048. [Google Scholar] [CrossRef]
- Peter, G.; Stonier, A.A.; Gupta, P.; Gavilanes, D.; Vergara, M.M.; Lung sin, J. Smart Fault Monitoring and Normalizing of a Power Distribution System Using IoT. Energies 2022, 15, 8206. [Google Scholar] [CrossRef]
- Rácz, L.; Szabó, D.; Göcsei, G.; Németh, B. Distributed Thermal Monitoring of High-Voltage Power Lines. Sensors 2023, 23, 2400. [Google Scholar] [CrossRef] [PubMed]
- Zanelli, F.; Mauri, M.; Castelli-Dezza, F.; Ripamonti, F. Continuous Monitoring of Transmission Lines Sag through Angular Measurements Performed with Wireless Sensors. Appl. Sci. 2023, 13, 3175. [Google Scholar] [CrossRef]
- Mazur, K.; Wydra, M.; Ksiezopolski, B. Secure and Time-Aware Communication of Wireless Sensors Monitoring Overhead Transmission Lines. Sensors 2017, 17, 1610. [Google Scholar] [CrossRef] [PubMed]
- Wydra, M.; Kubaczynski, P.; Mazur, K.; Ksiezopolski, B. Time-Aware Monitoring of Overhead Transmission Line Sag and Temperature with LoRa Communication. Energies 2019, 12, 505. [Google Scholar] [CrossRef]
- Wydra, M.; Kisala, P.; Harasim, D.; Kacejko, P. Overhead Transmission Line Sag Estimation Using a Simple Optomechanical System with Chirped Fiber Bragg Gratings. Part 1: Preliminary Measurements. Sensors 2018, 18, 309. [Google Scholar] [CrossRef]
- Skorupski, K.; Harasim, D.; Panas, P.; Cięszczyk, S.; Kisała, P.; Kacejko, P.; Mroczka, J.; Wydra, M. Overhead Transmission Line Sag Estimation Using the Simple Opto-Mechanical System with Fiber Bragg Gratings—Part 2: Interrogation System. Sensors 2020, 20, 2652. [Google Scholar] [CrossRef]
- Mahajan, S. M.; Singareddy, U. M. A Real-Time Conductor Sag Measurement System Using a Differential GPS. IEEE Transactions on Power Delivery 2012, 27, 475–480. [Google Scholar] [CrossRef]
- Sacerdoţianu, D.; Nicola, M.; Nicola, C.-I.; Lăzărescu, F. Research on the Continuous Monitoring of the Sag of Overhead Electricity Transmission Cables Based on the Measurement of their Slope. In Proceedings of the International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 04–06 October 2018; pp. 1–5. [Google Scholar]
- Kharab, A.; Guenther, R. An Introduction to Numerical Methods: A MATLAB Approach, 5th ed.; Chapman and Hall/CRC: Boca Raton, Florida, US, 2023; pp. 252–396. [Google Scholar]
- Chapra, S. Applied Numerical Methods with MATLAB for Engineers and Scientists, 5th ed.; McGraw Hill: New York, US, 2022; pp. 379–498. [Google Scholar]
- Essick, J. Hands-On Introduction to LabVIEW for Scientists and Engineers, 4th ed.; Oxford University Press: Oxford, England, 2018; pp. 502–683. [Google Scholar]
- Essick, J. Hands-On Introduction to LabVIEW for Scientists and Engineers, 2nd ed.; Oxford University Press: Oxford, England, 2012; pp. 439–575. [Google Scholar]
- Martins, T.; Oliveira, S.V.G. Enhanced Modbus/TCP Security Protocol: Authentication and Authorization Functions Supported. Sensors 2022, 22, 8024. [Google Scholar] [CrossRef] [PubMed]
- Haque, K.F.; Abdelgawad, A.; Yelamarthi, K. Comprehensive Performance Analysis of Zigbee Communication: An Experimental Approach with XBee S2C Module. Sensors 2022, 22, 3245. [Google Scholar] [CrossRef] [PubMed]
- Daousis, S.; Peladarinos, N.; Cheimaras, V.; Papageorgas, P.; Piromalis, D.D.; Munteanu, R.A. Overview of Protocols and Standards for Wireless Sensor Networks in Critical Infrastructures. Future Internet 2024, 16, 33. [Google Scholar] [CrossRef]
- Győrödi, C.A.; Dumşe-Burescu, D.V.; Győrödi, R.Ş.; Zmaranda, D.R.; Bandici, L.; Popescu, D.E. Performance Impact of Optimization Methods on MySQL Document-Based and Relational Databases. Appl. Sci. 2021, 11, 6794. [Google Scholar] [CrossRef]
- Nicola, M.; Nicola, C.-I.; Duță, M.; Sacerdoțianu, D. SCADA Systems Architecture Based on OPC and Web Servers and Integration of Applications for Industrial Process Control. International Journal of Control Science and Engineering 2018, 8, 13–21. [Google Scholar]
- Stavropoulos, G.; Violos, J.; Tsanakas, S.; Leivadeas, A. Enabling Artificial Intelligent Virtual Sensors in an IoT Environment. Sensors 2023, 23, 1328. [Google Scholar] [CrossRef] [PubMed]
- Papini, D. On shape control of cables under vertical static loads. Master’s Thesis, Lund University, Lund, 2010. [Google Scholar]
- Level Developments—Inclinometer sensors. Available online: https://www.leveldevelopments.com/products/inclinometers/inclinometer-sensors/ (accessed on 23 May 2022).
- Micromega Wolfel Group—RECOVIB industrial mems accelerometers. Available online: https://micromega-dynamics.com/products/recovib/industrial-accelerometers/ (accessed on 10 June 2022).
- Wit Motion—BLE inclinometer series. Available online: https://www.wit-motion.com/axial-sensor-factory/ (accessed on 21 September 2022).
- Load Cell Central—Load Cells. Available online: https://www.800loadcel.com/load-cells/tension-link-load-cells/ (accessed on 11 November 2022).
- Teltonika—TRB145 Manual. Available online: https://wiki.teltonika-networks.com/view/TRB145_Manual (accessed on 12 May 2023).
Figure 1.
Geometric representation of the cable sag.
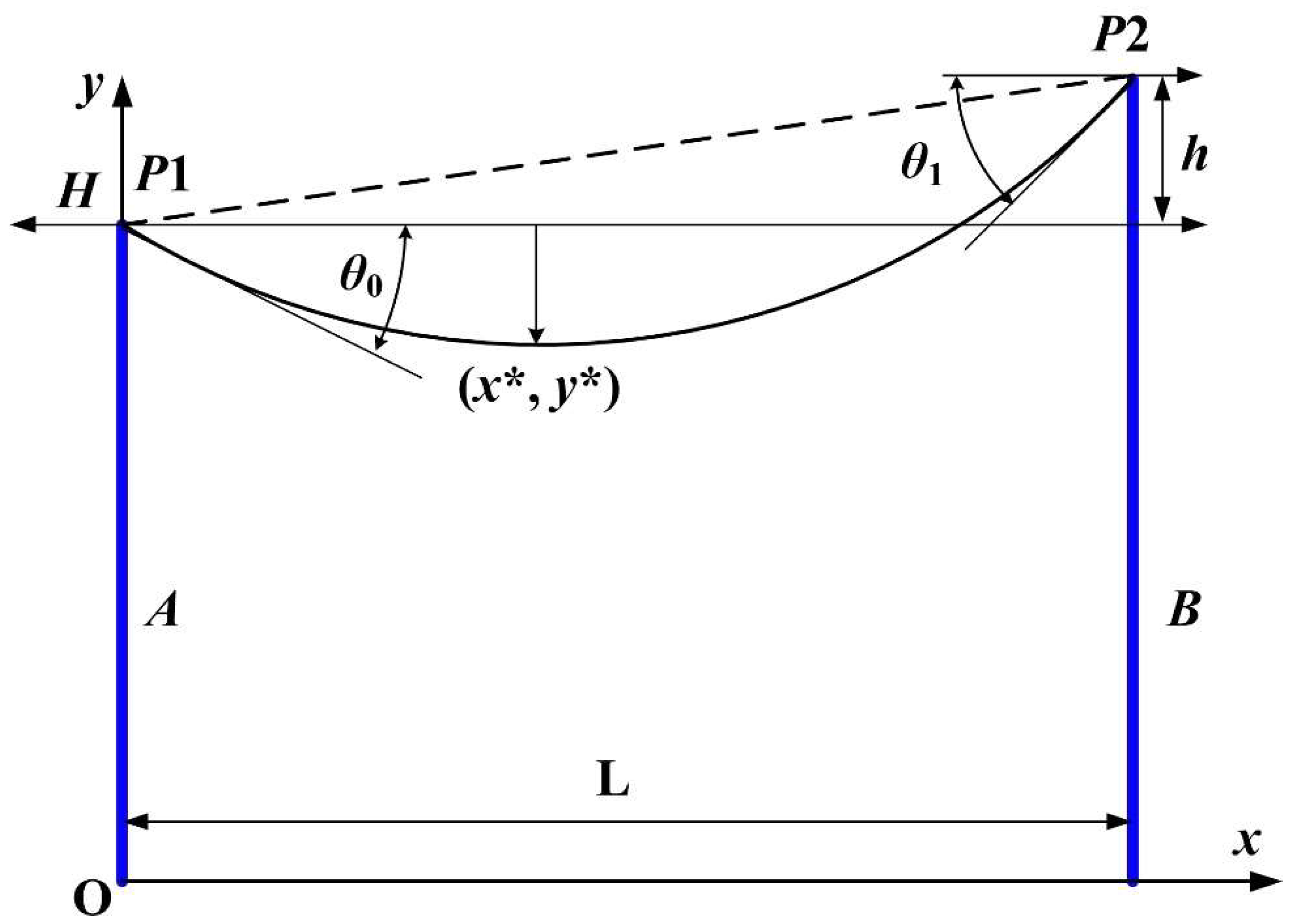
Figure 2.
Equilibrium of an infinitesimal element of the inextensible cable under gravitational load.
Figure 2.
Equilibrium of an infinitesimal element of the inextensible cable under gravitational load.
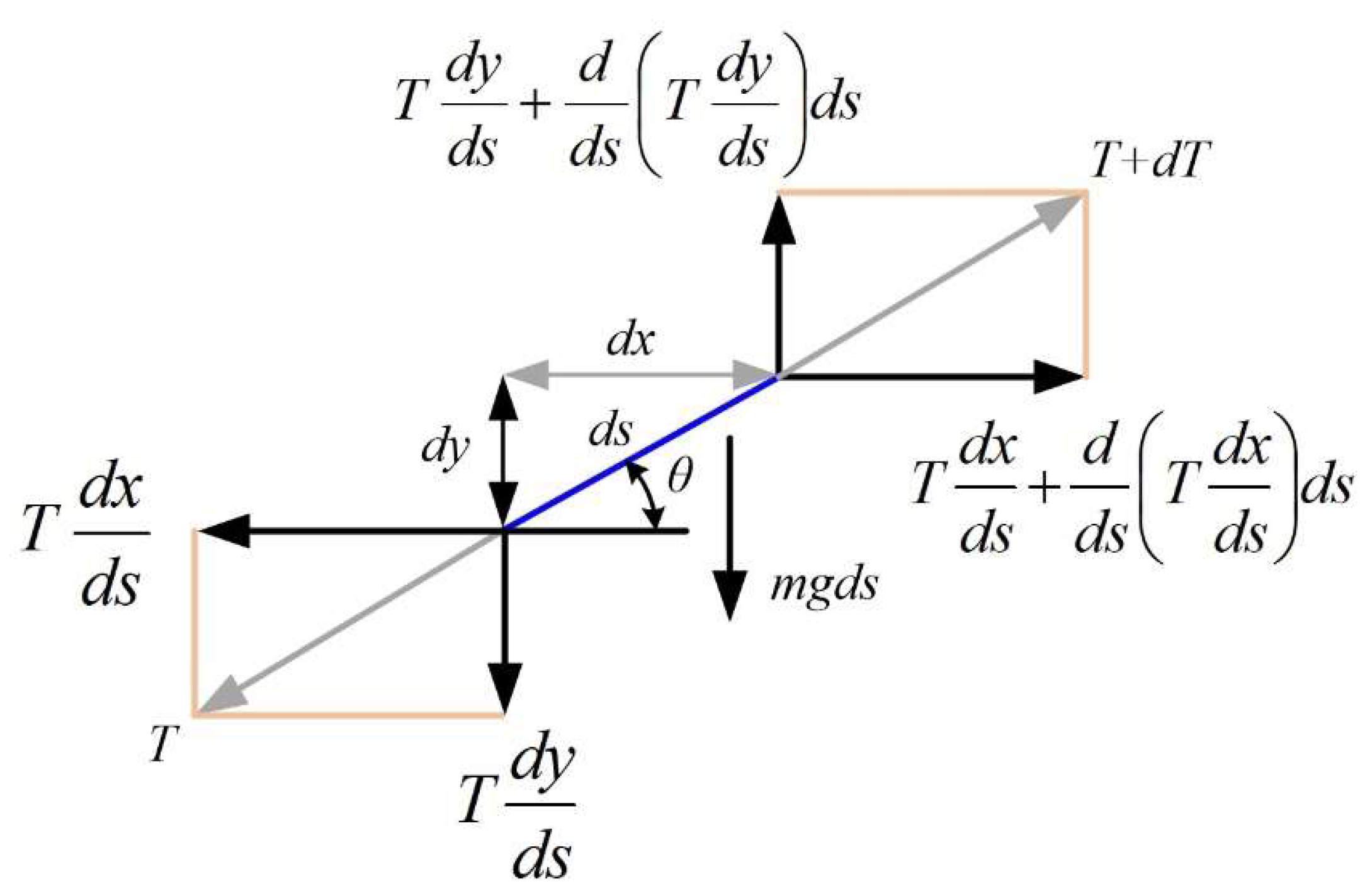
Figure 3.
Cable sag calculation algorithm – Matlab implementation.
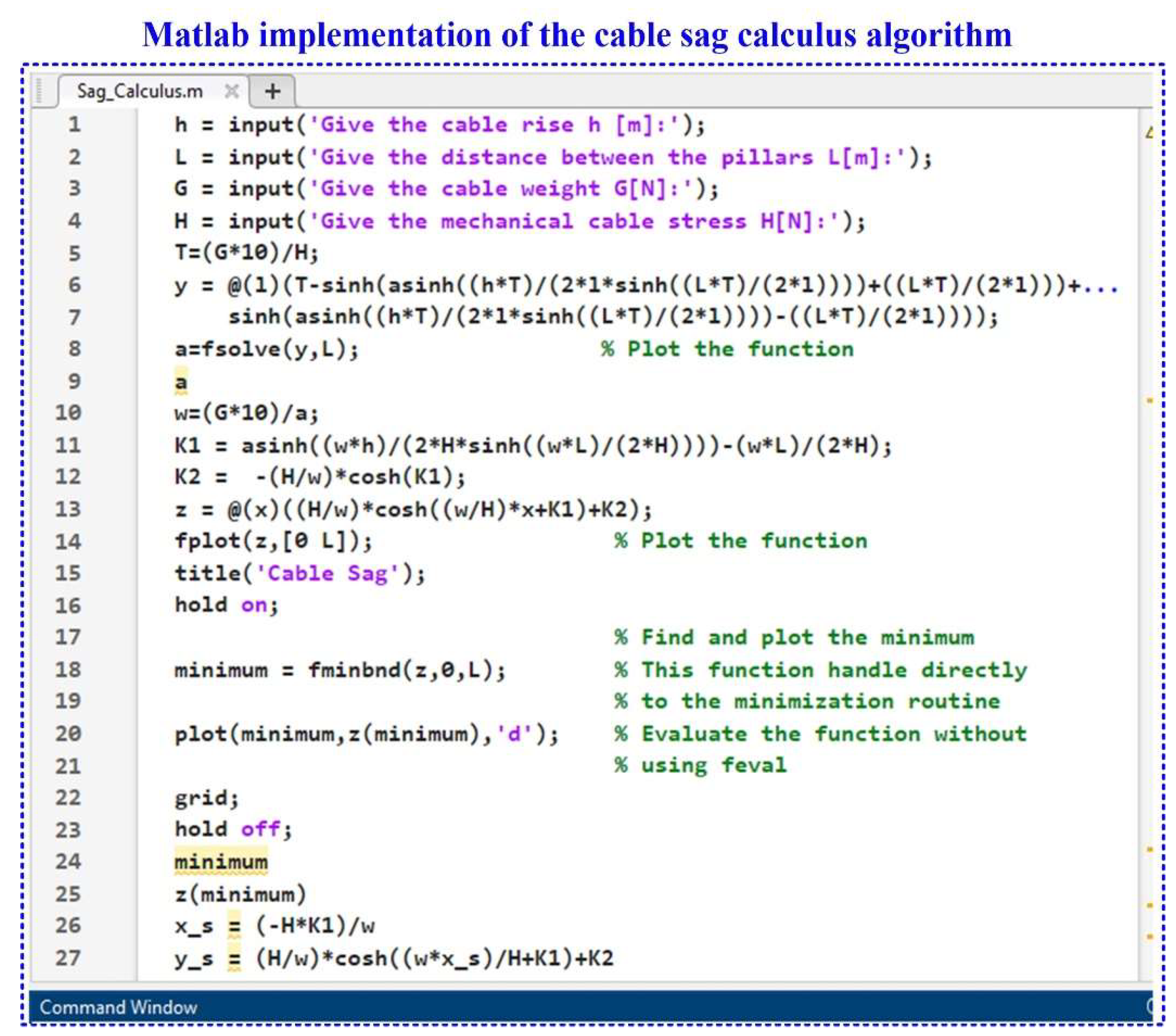
Figure 4.
Numerical simulation and Matlab graphical representation of the cable sag determination for the example 1.
Figure 4.
Numerical simulation and Matlab graphical representation of the cable sag determination for the example 1.
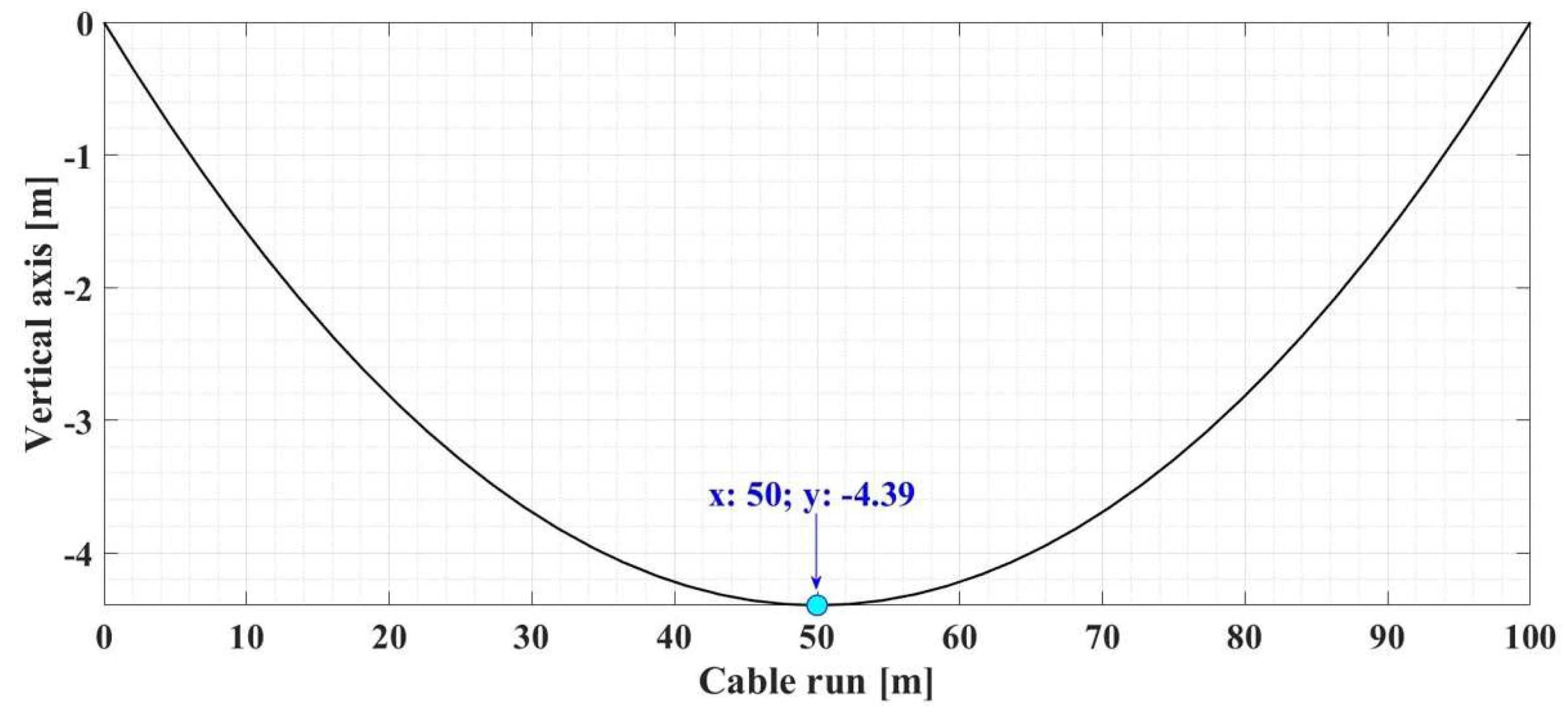
Figure 5.
Numerical simulation and Matlab graphical representation of the cable sag determination for the example 2.
Figure 5.
Numerical simulation and Matlab graphical representation of the cable sag determination for the example 2.
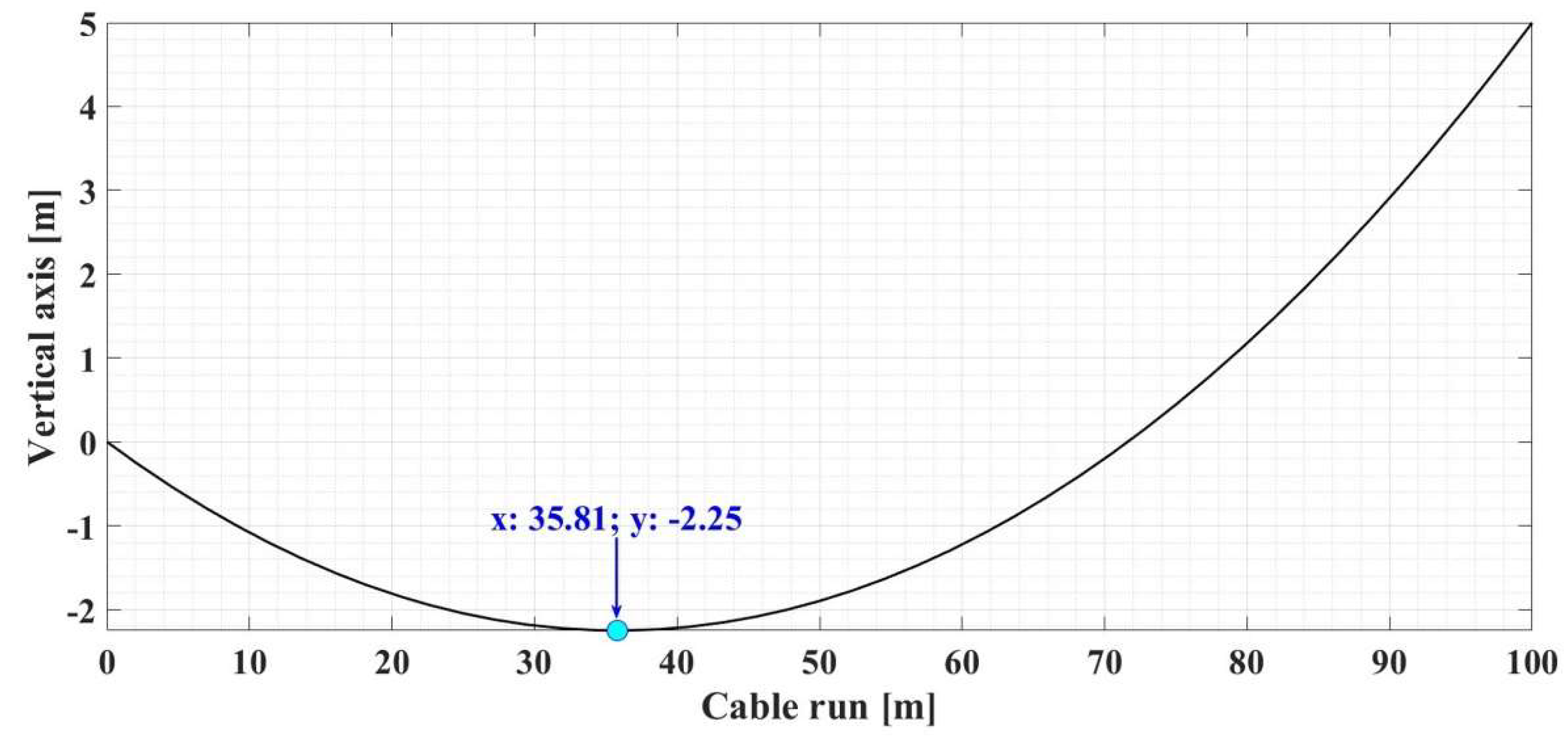
Figure 6.
Proposed general hardware architecture of the OPL cable monitoring system.
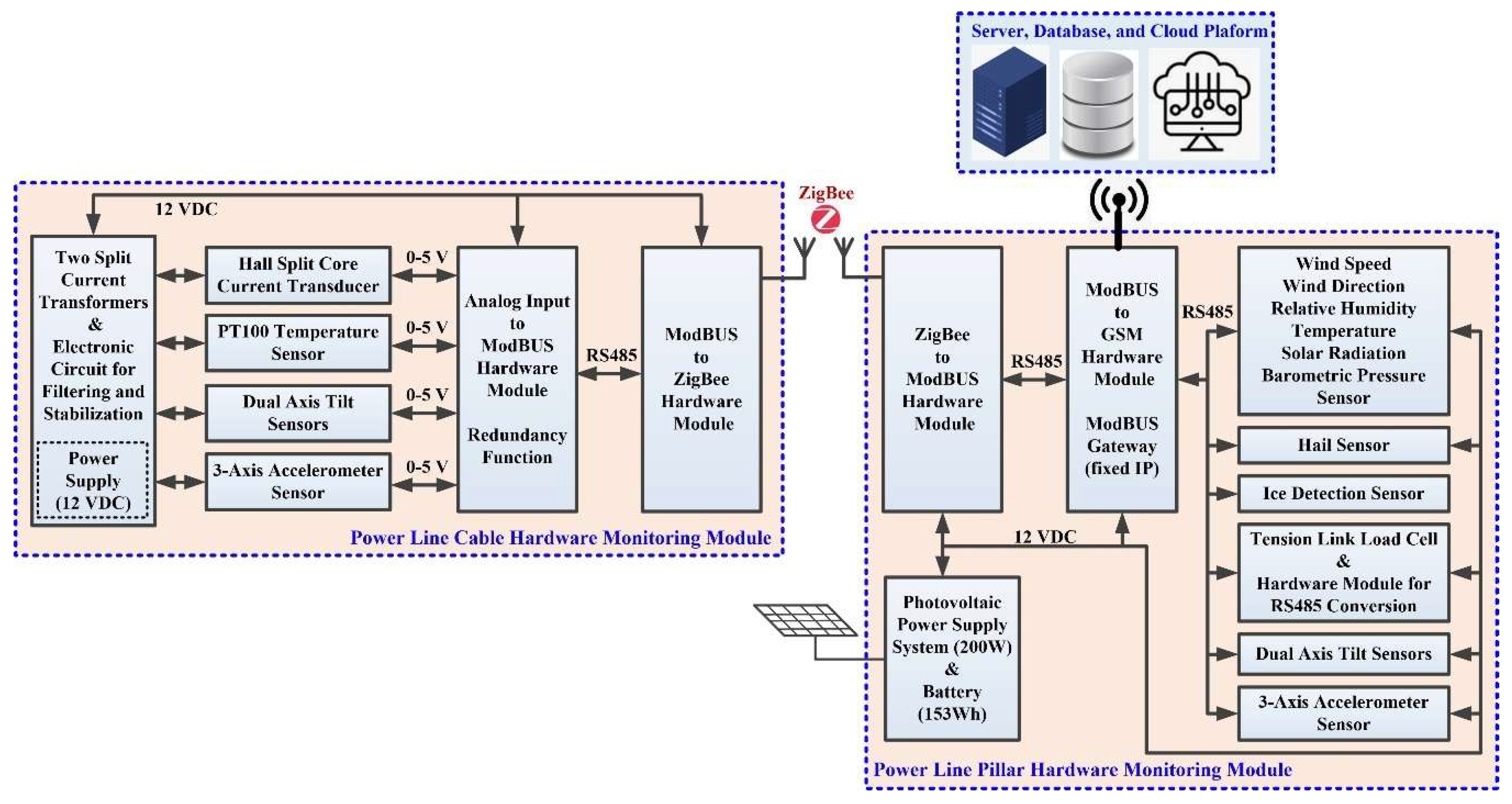
Figure 7.
Sensor network for the OPL cable monitoring system: (a) Sensors for measuring the state of the OPL cables; (b) Split core current transformers and Hall split core current transducer; (c) Power line pilar hardware modules cabinet; (d) Climatic conditions (wind and ice) sensors.
Figure 7.
Sensor network for the OPL cable monitoring system: (a) Sensors for measuring the state of the OPL cables; (b) Split core current transformers and Hall split core current transducer; (c) Power line pilar hardware modules cabinet; (d) Climatic conditions (wind and ice) sensors.
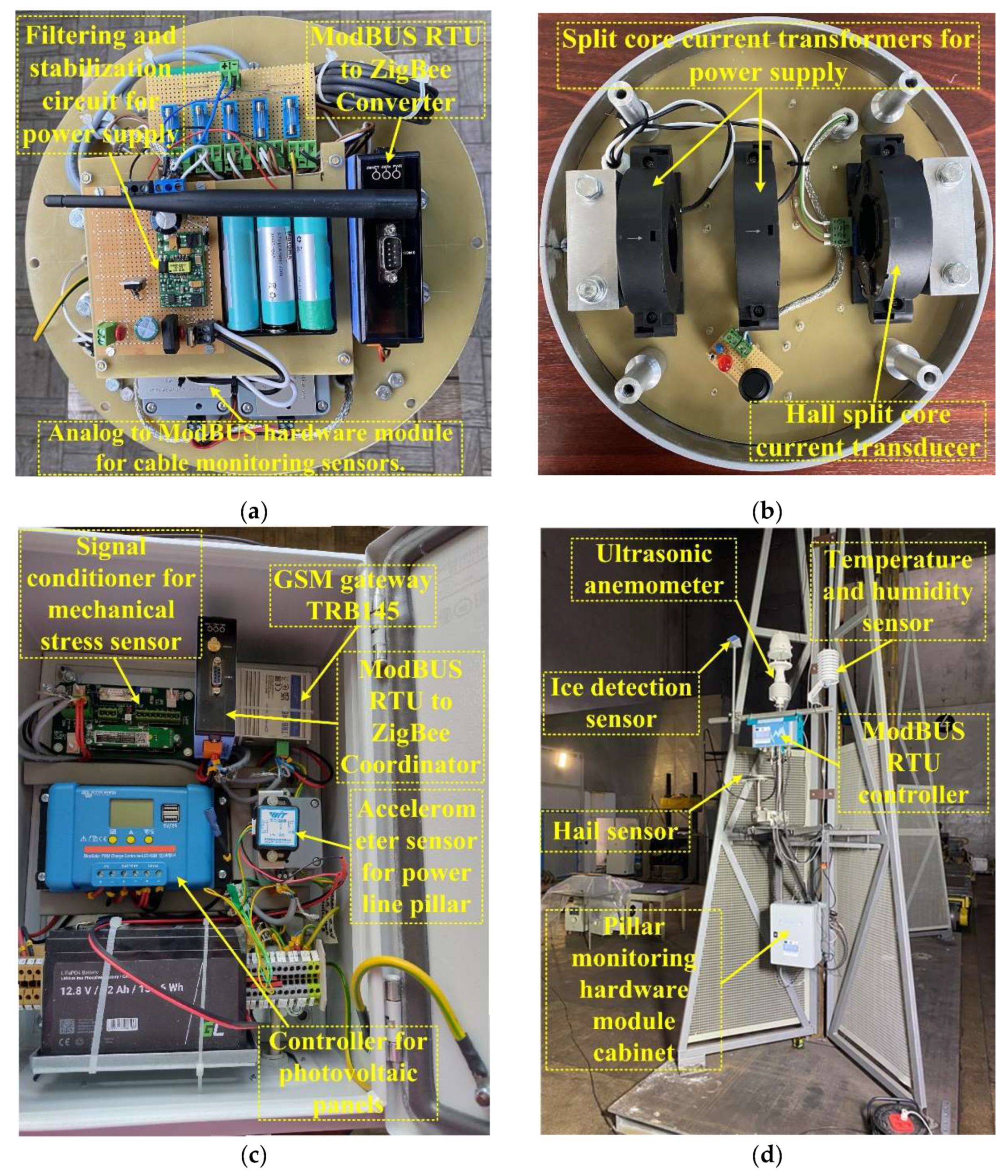
Figure 8.
Analogue input to ModBUS RTU hardware module basic configuration.
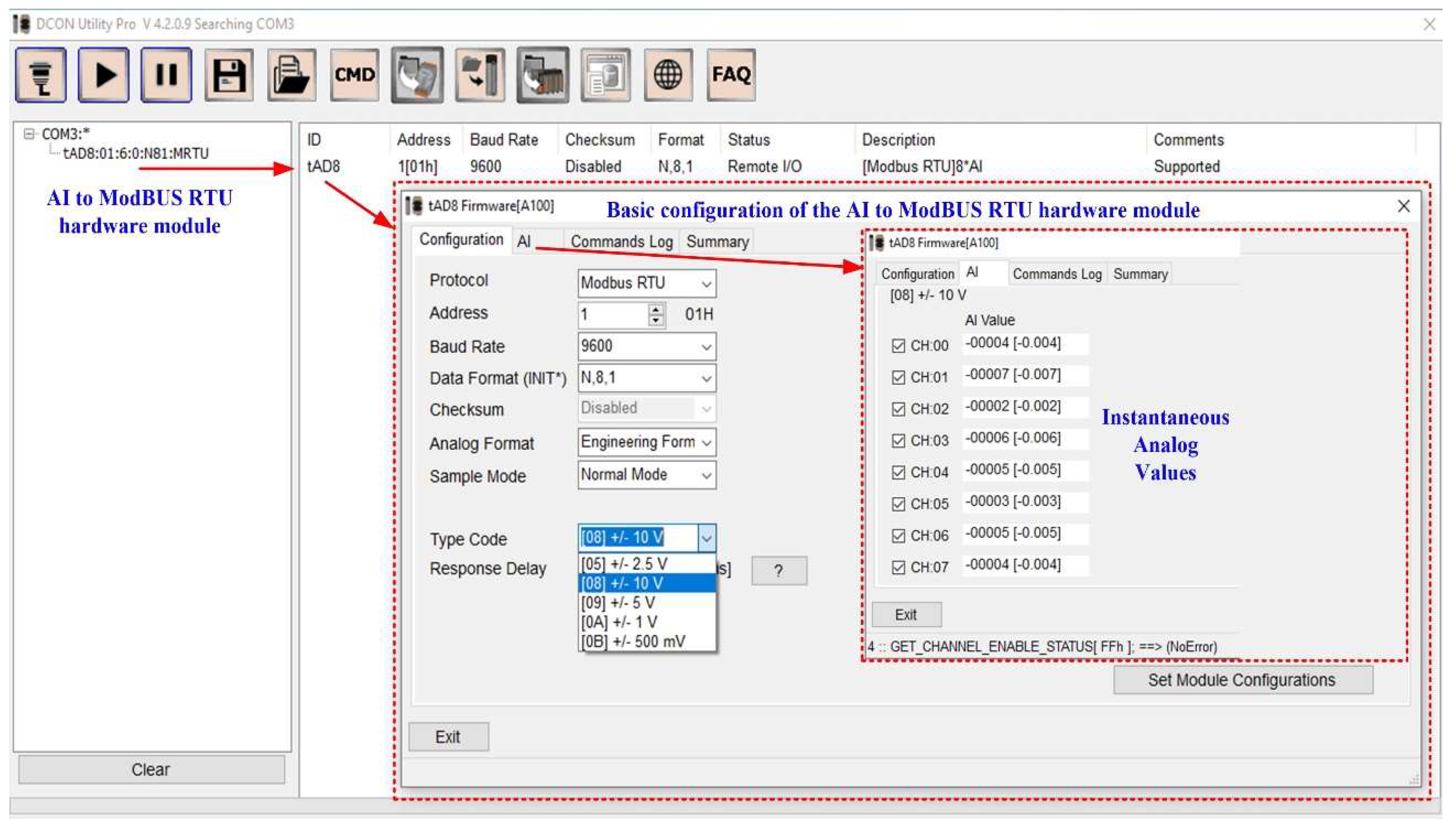
Figure 9.
Analogue input to ModBUS RTU hardware module communication settings: (a) Communication parameter settings; (b) ModBUS data format settings; (c) Analogue channel data format settings.
Figure 9.
Analogue input to ModBUS RTU hardware module communication settings: (a) Communication parameter settings; (b) ModBUS data format settings; (c) Analogue channel data format settings.
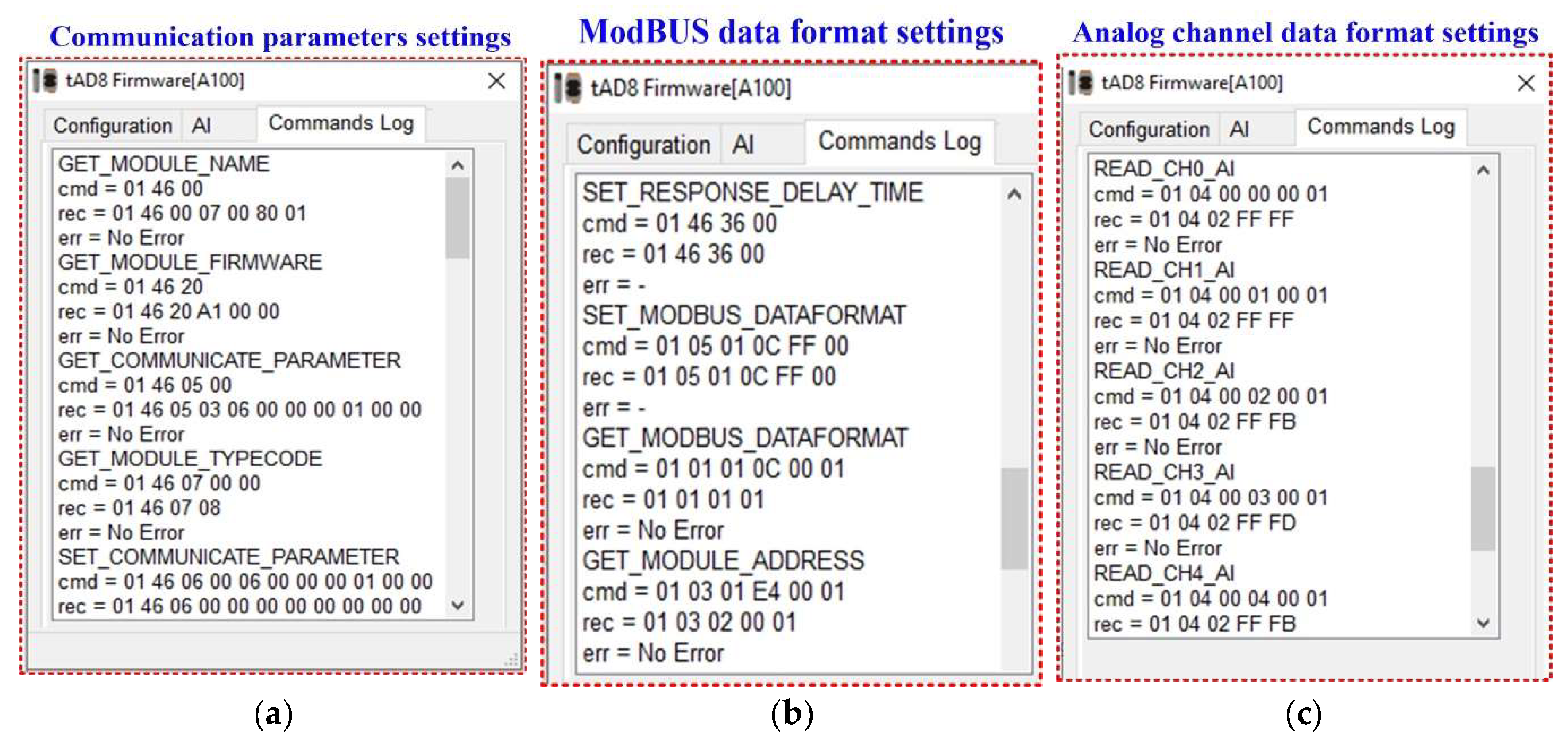
Figure 10.
ZigBee network configuration for OPL cable unit hardware module (cable quantity monitoring sensors) to pillar hardware unit (pillar quantity monitoring sensors)
Figure 10.
ZigBee network configuration for OPL cable unit hardware module (cable quantity monitoring sensors) to pillar hardware unit (pillar quantity monitoring sensors)
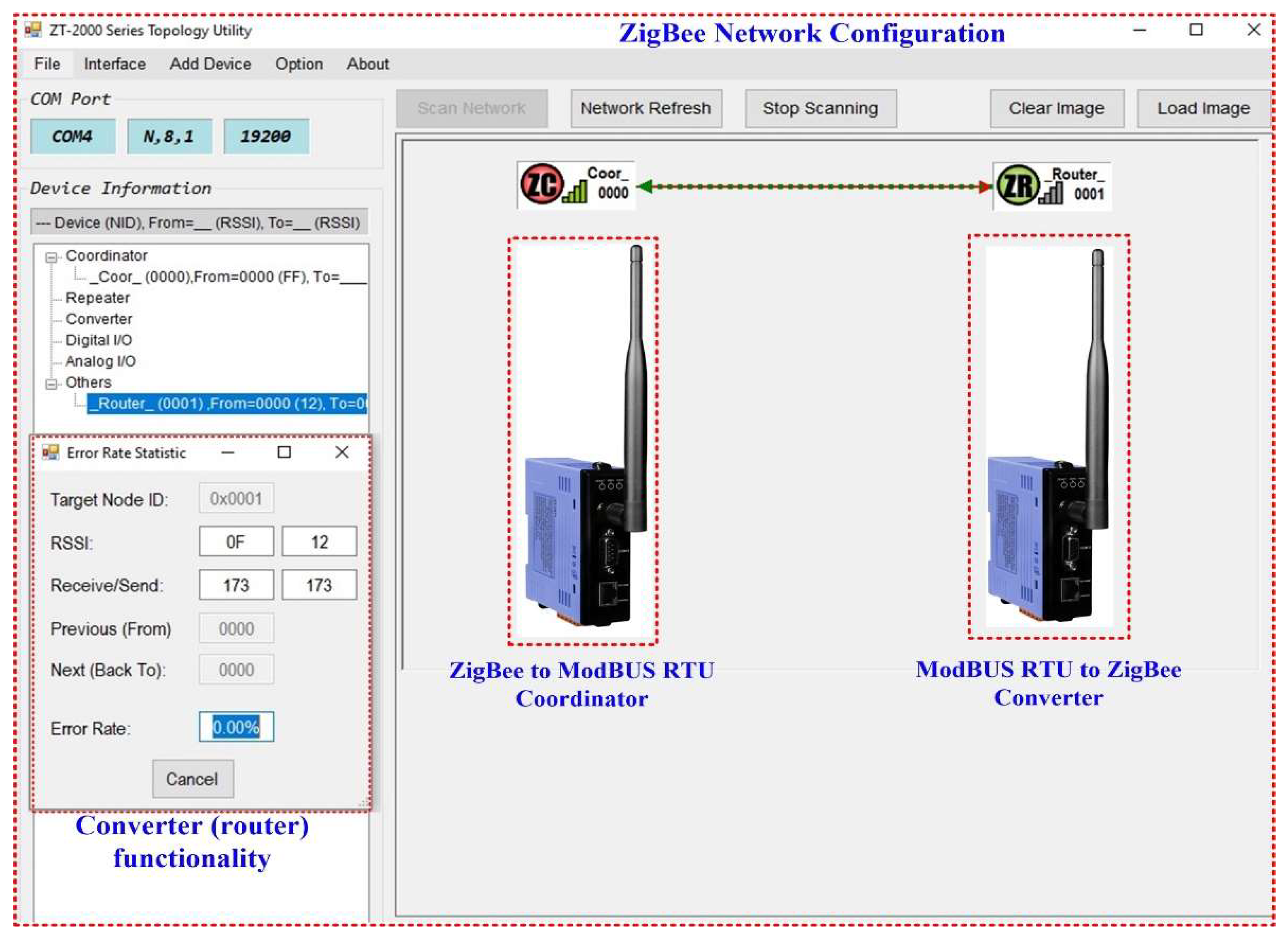
Figure 11.
GSM gateway hardware module software configuration example for reading data from the ModBUS slaves (ZigBee coordinator and inclinometer type sensor).
Figure 11.
GSM gateway hardware module software configuration example for reading data from the ModBUS slaves (ZigBee coordinator and inclinometer type sensor).
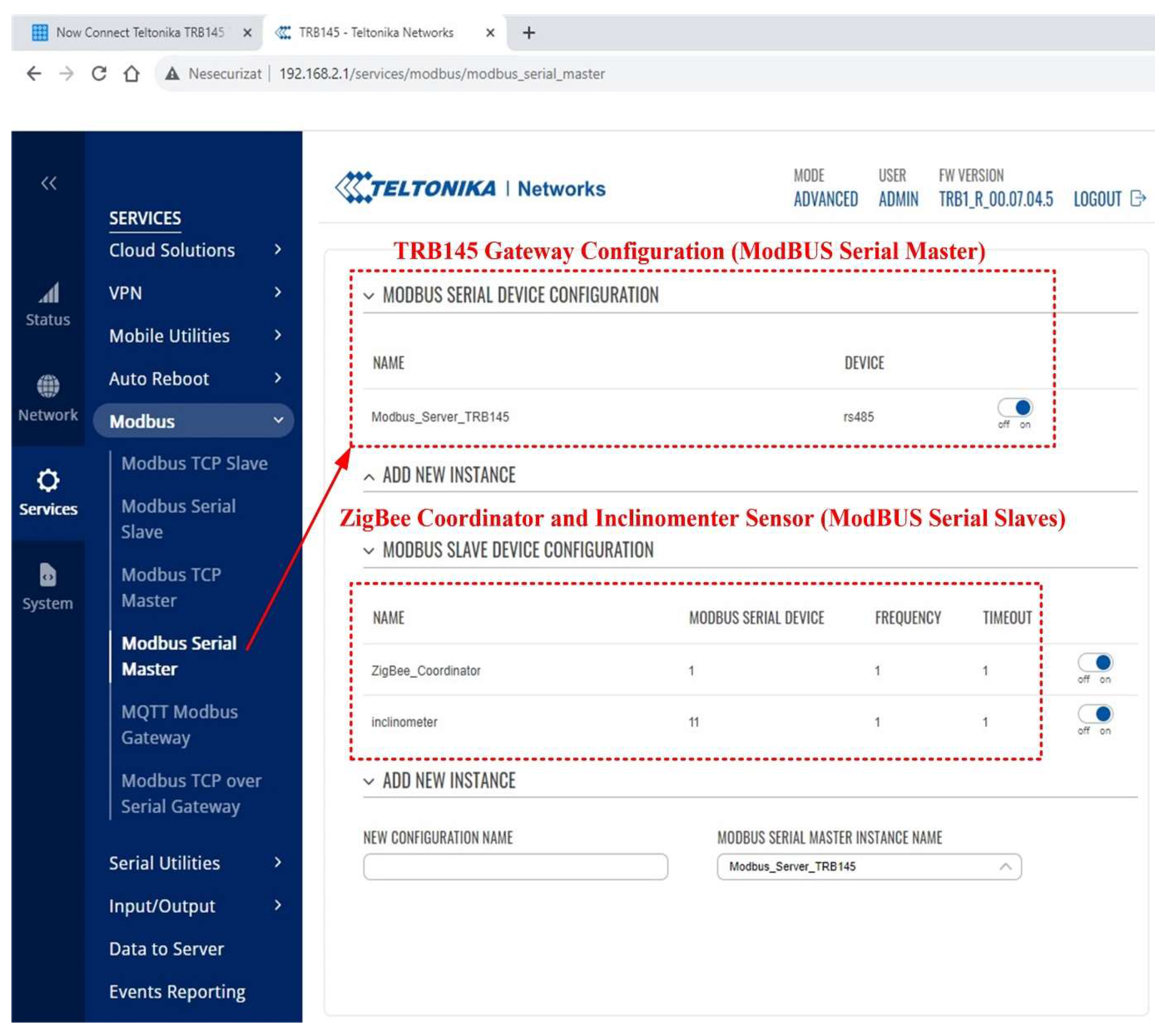
Figure 12.
GSM gateway hardware module ModBUS functions programming for inclinometer type sensor.
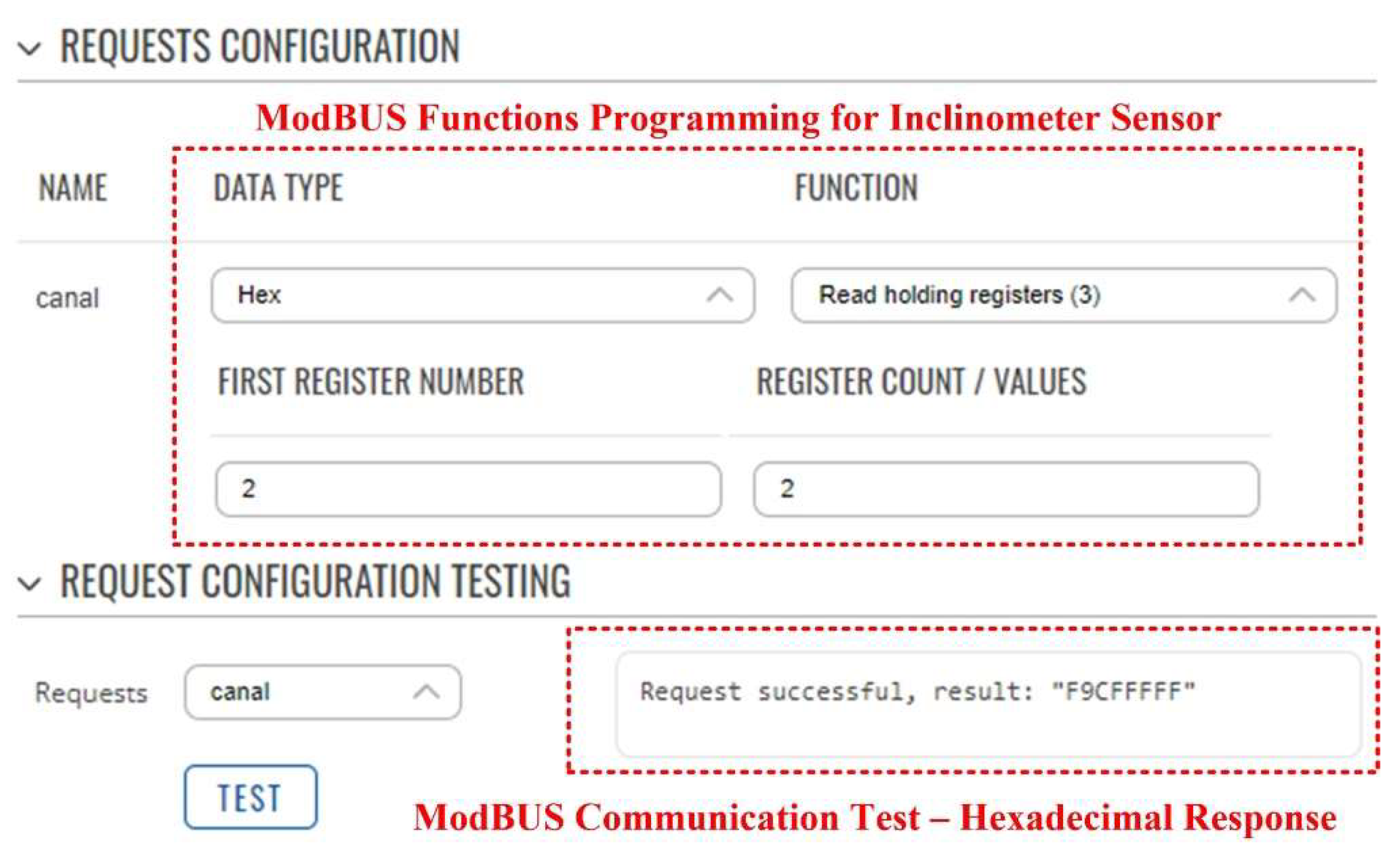
Figure 13.
GSM gateway hardware module ModBUS functions programming for ZigBee coordinator.
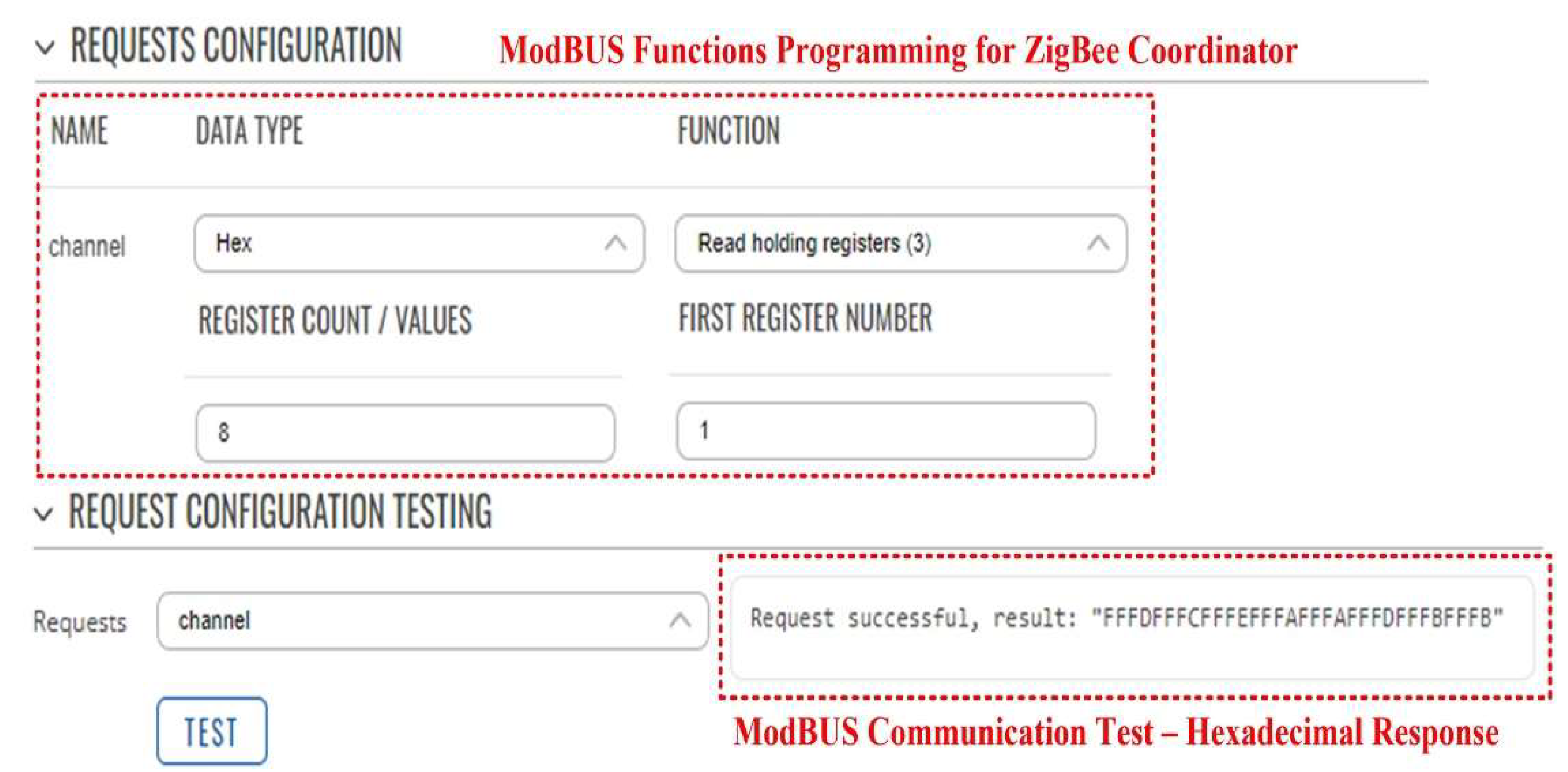
Figure 14.
Software architecture of the OPL cable monitoring system.
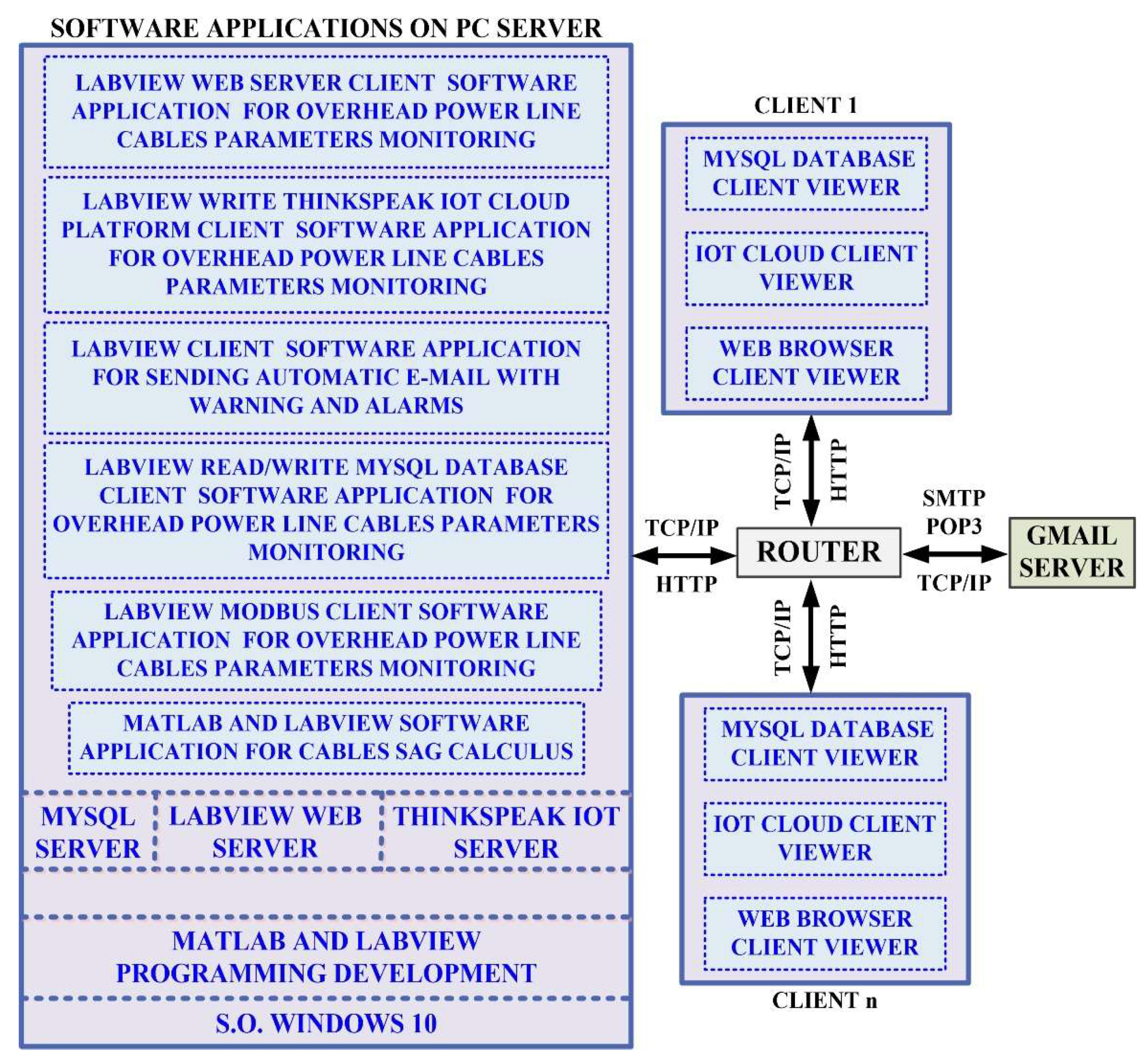
Figure 15.
LabVIEW project configuration of the ModBUS I/O Server for reading real-time data from inclinometer sensors.
Figure 15.
LabVIEW project configuration of the ModBUS I/O Server for reading real-time data from inclinometer sensors.

Figure 16.
LabVIEW project and block diagram for reading inclinometer-type sensors via ModBUS Server.
Figure 16.
LabVIEW project and block diagram for reading inclinometer-type sensors via ModBUS Server.
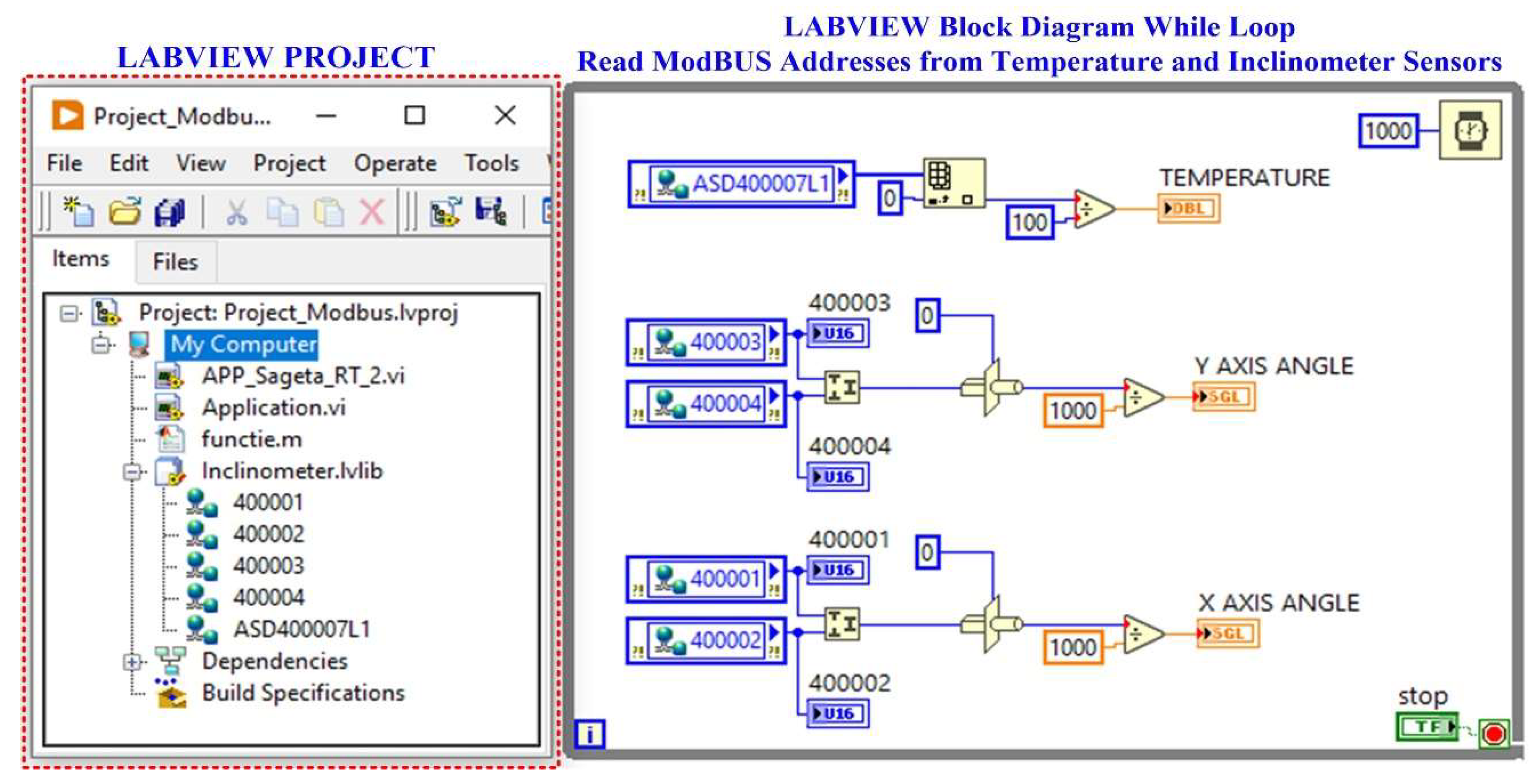
Figure 17.
LabVIEW block diagram for real-time calculation of the cable sag.
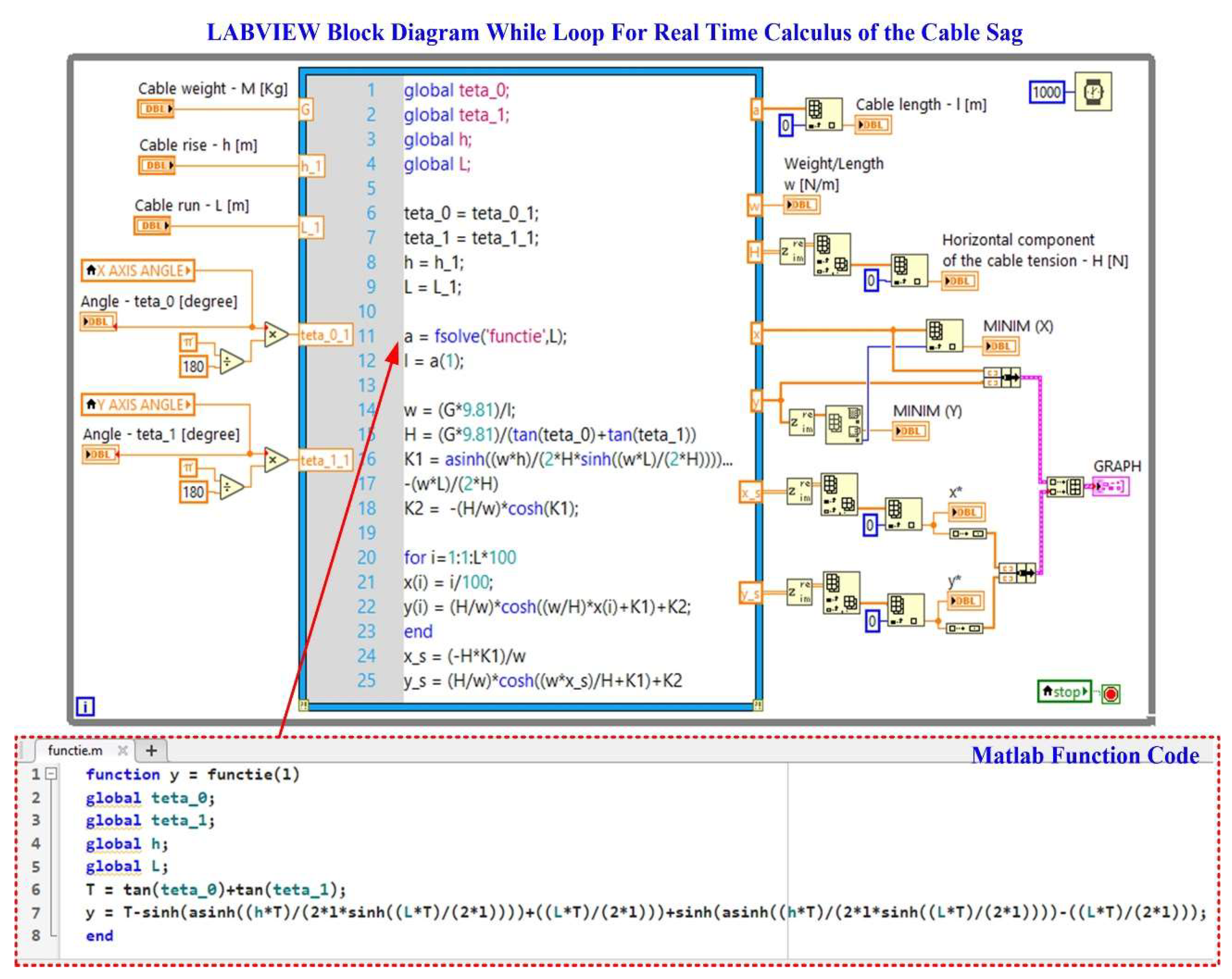
Figure 18.
MySQL database and LabVIEW connection configuration using the ODBC connector.
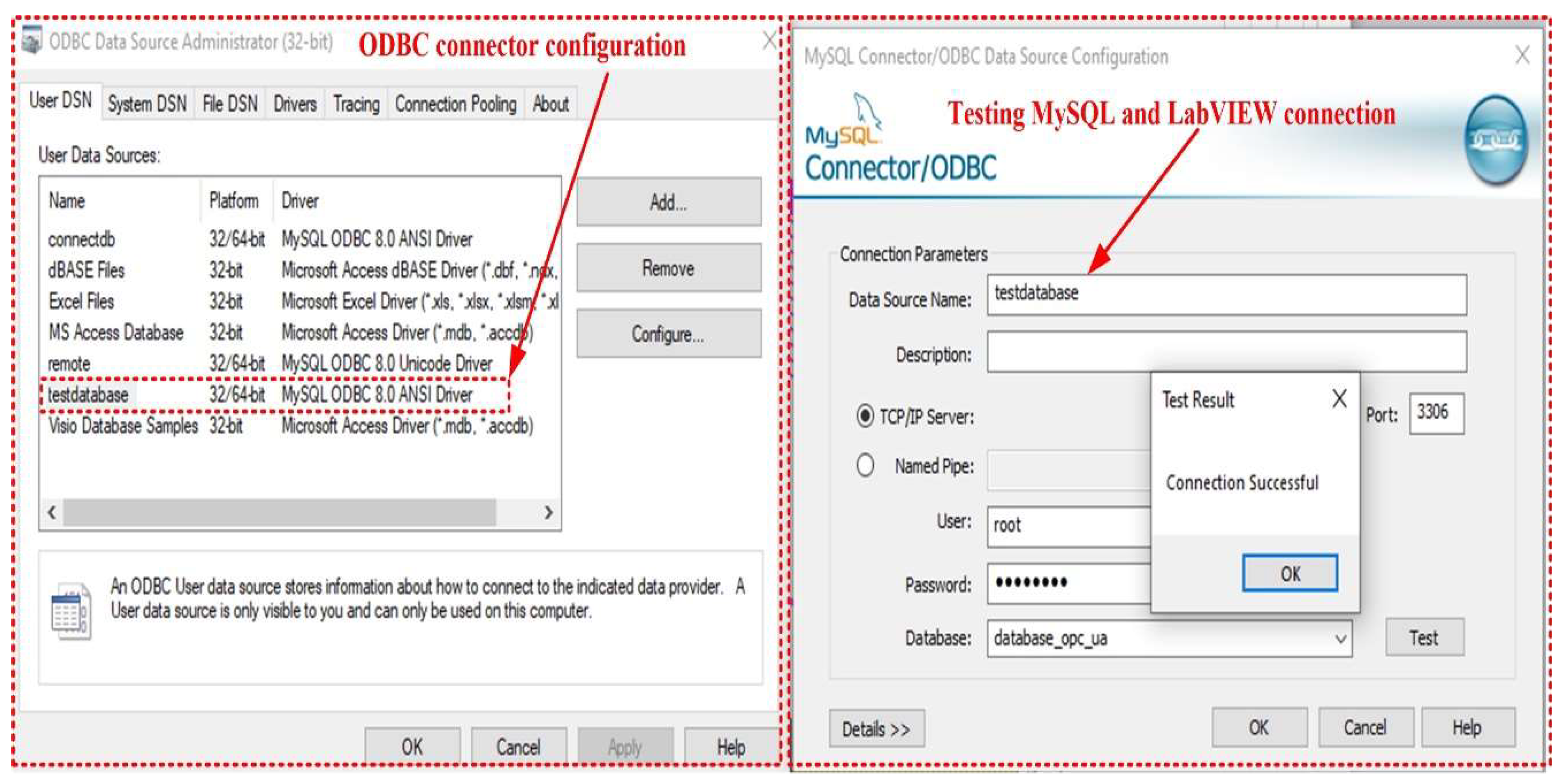
Figure 19.
LabVIEW client software application block diagram for writing cable monitoring data to the MySQL database.
Figure 19.
LabVIEW client software application block diagram for writing cable monitoring data to the MySQL database.
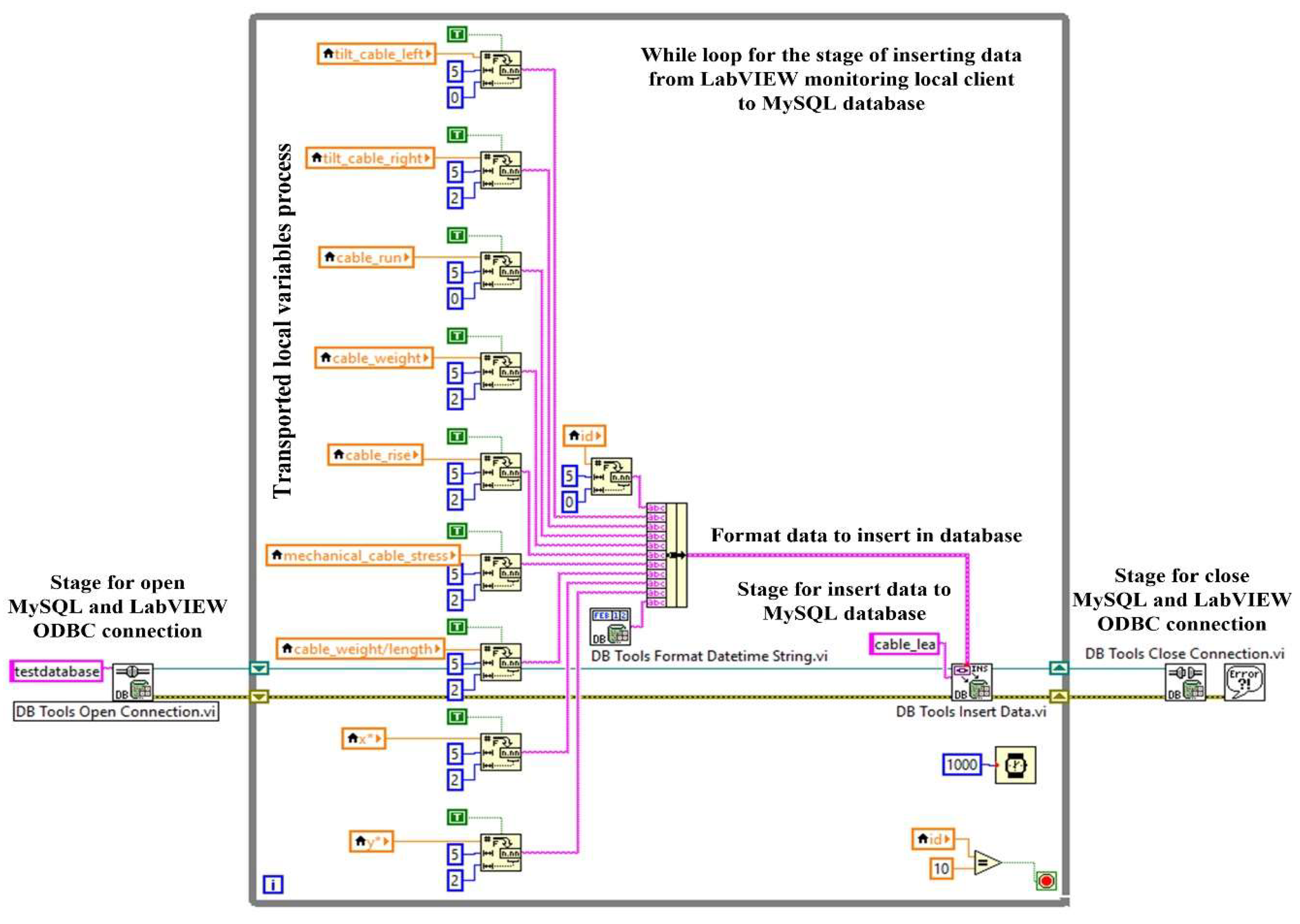
Figure 20.
MySQL Workbench interface for database populated with real-time cable monitoring data.
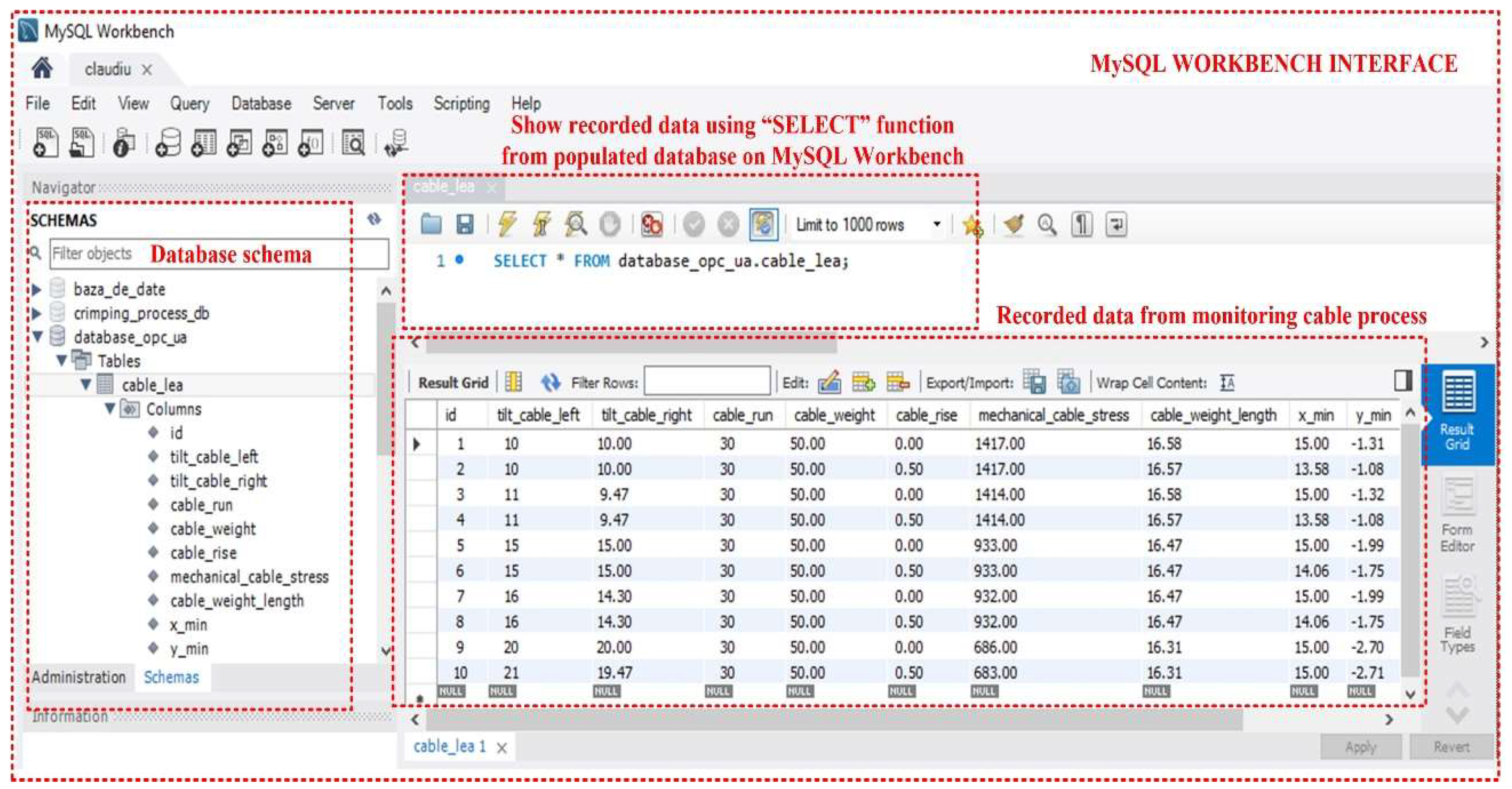
Figure 21.
LabVIEW client software application for reading cable monitoring data from the MySQL database: (a) LabVIEW software block diagram; (b) LabVIEW software interface.
Figure 21.
LabVIEW client software application for reading cable monitoring data from the MySQL database: (a) LabVIEW software block diagram; (b) LabVIEW software interface.
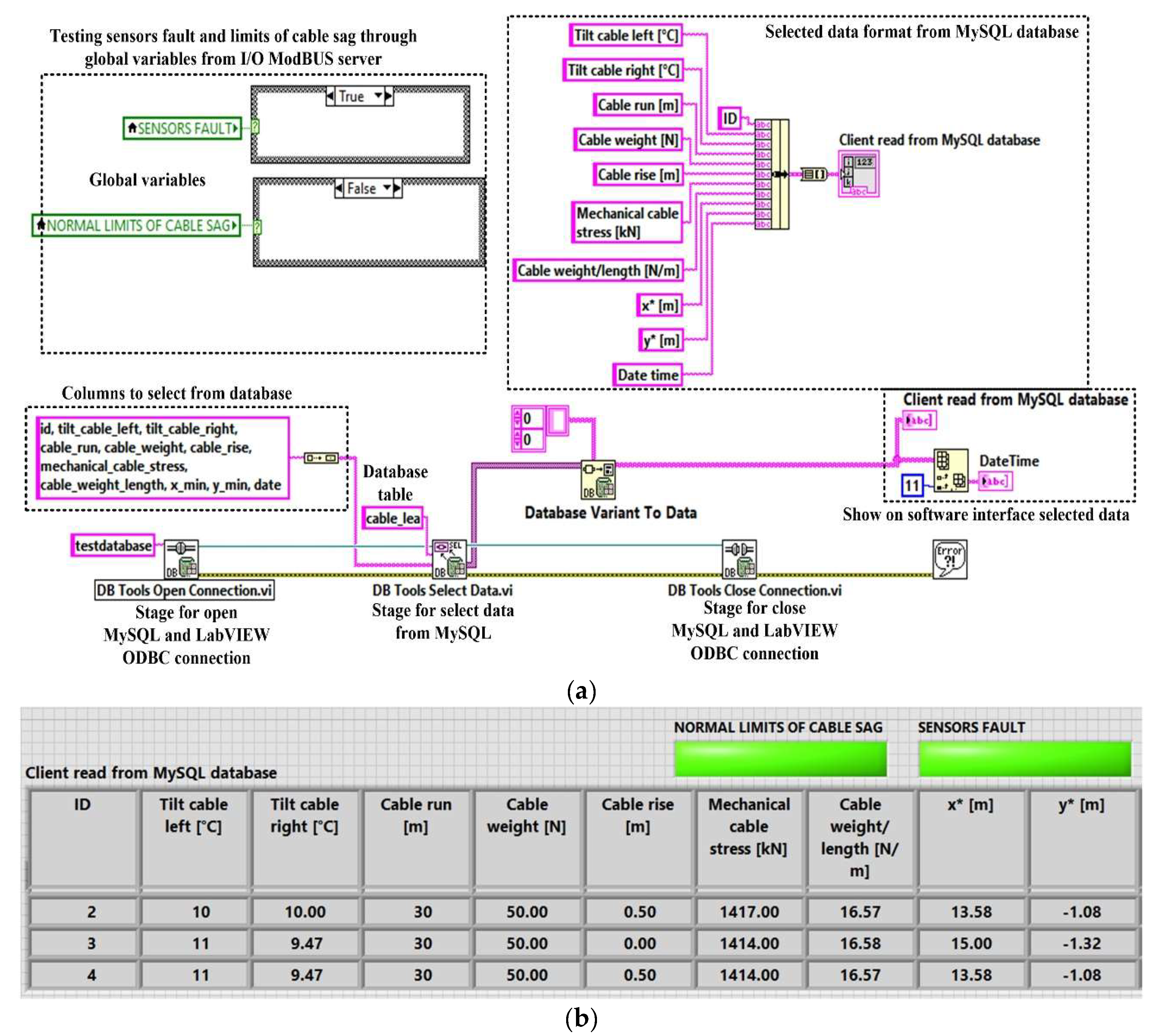
Figure 22.
LabVIEW software block diagram of automated sending email process.
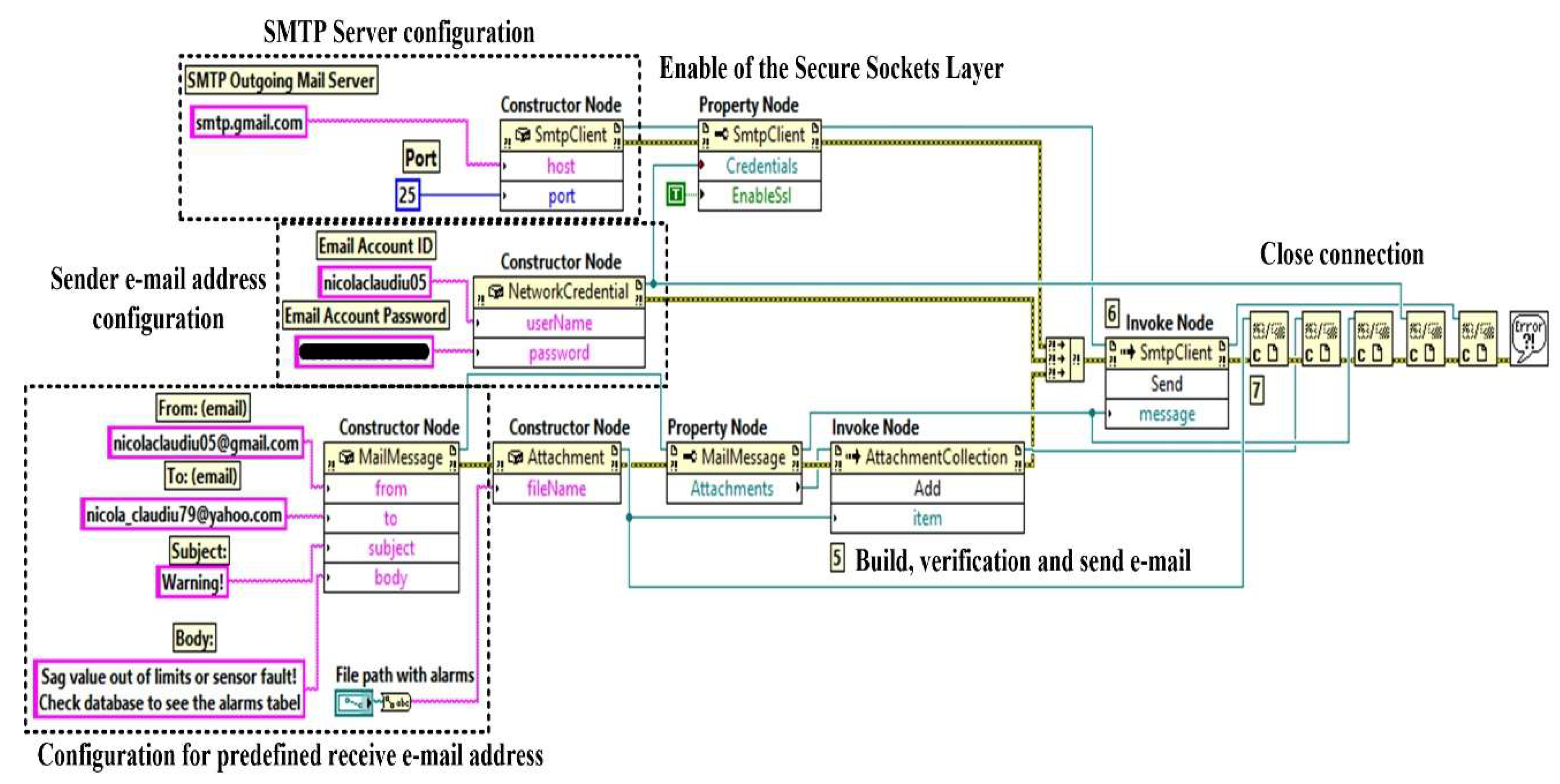
Figure 23.
LabVIEW web server project of real-time software application for OPL cable monitoring process.
Figure 23.
LabVIEW web server project of real-time software application for OPL cable monitoring process.
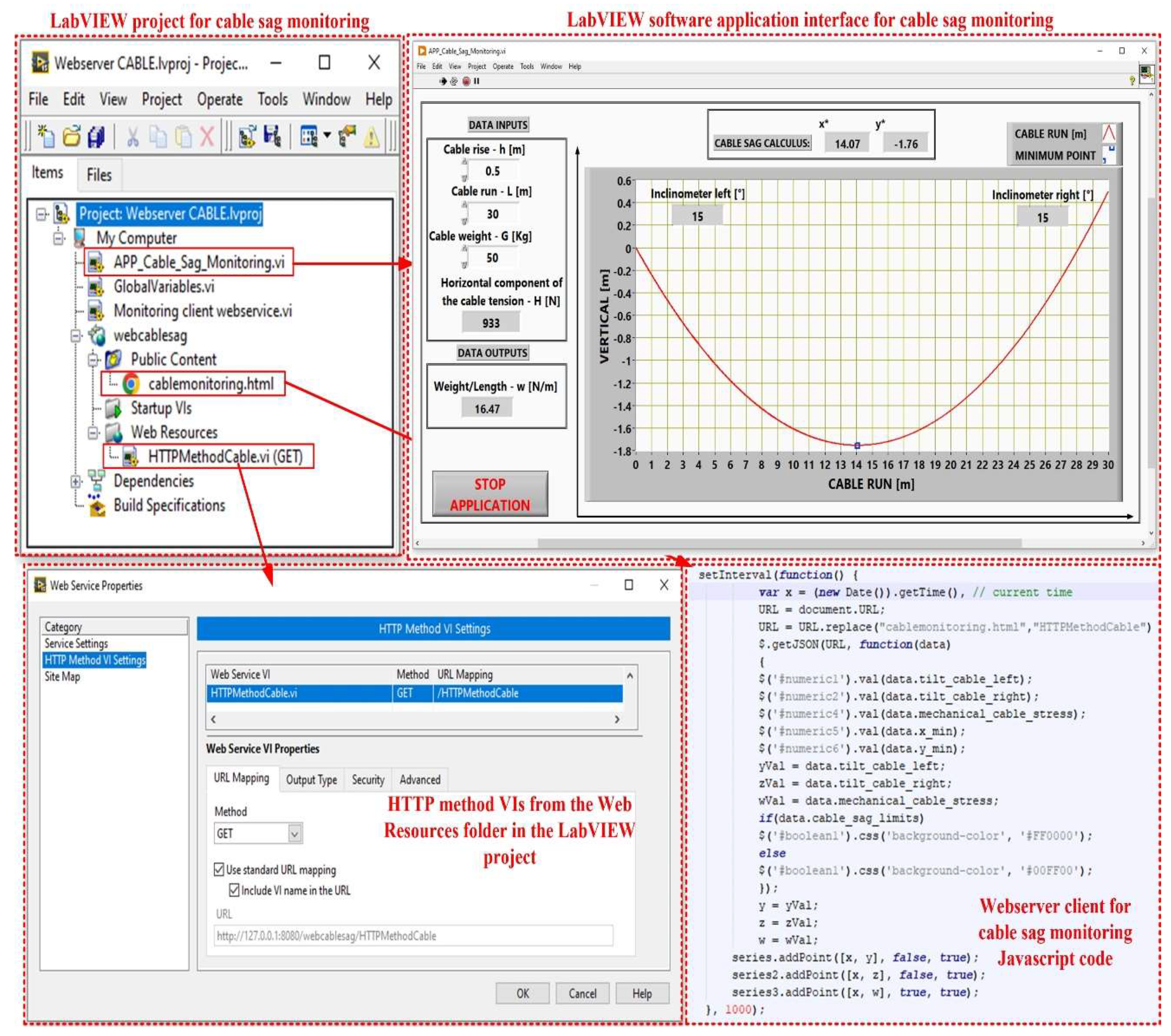
Figure 24.
OPL cables monitoring system testing in laboratory conditions.
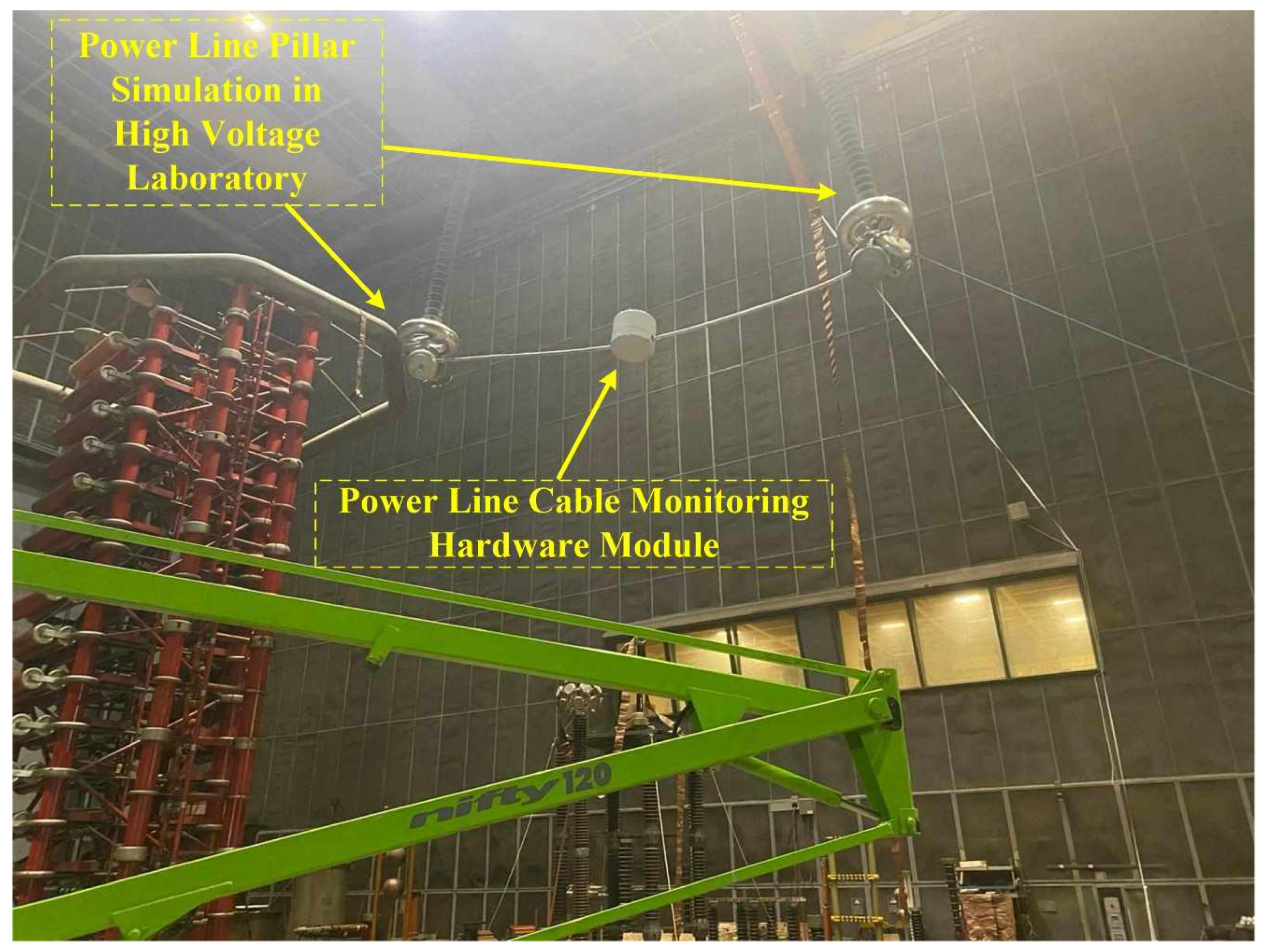
Figure 25.
LabVIEW client software application for reading the cable monitoring process data from MySQL database: (a) LabVIEW software block diagram of the HTTP method; (b) client browser software interface.
Figure 25.
LabVIEW client software application for reading the cable monitoring process data from MySQL database: (a) LabVIEW software block diagram of the HTTP method; (b) client browser software interface.
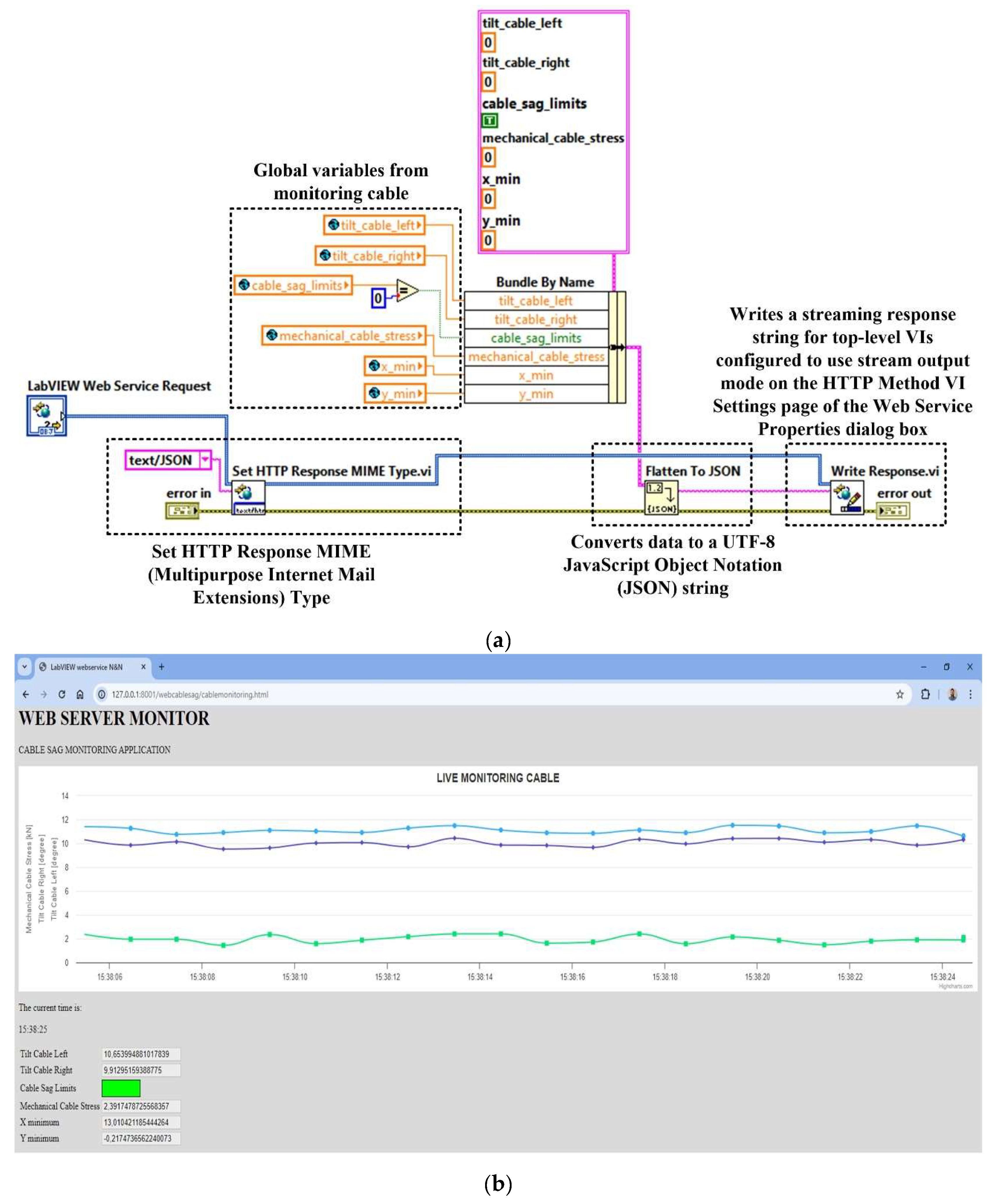
Figure 26.
ThinkSpeak IoT cloud platform with data from OPL cable monitoring process - channel settings for fields.
Figure 26.
ThinkSpeak IoT cloud platform with data from OPL cable monitoring process - channel settings for fields.
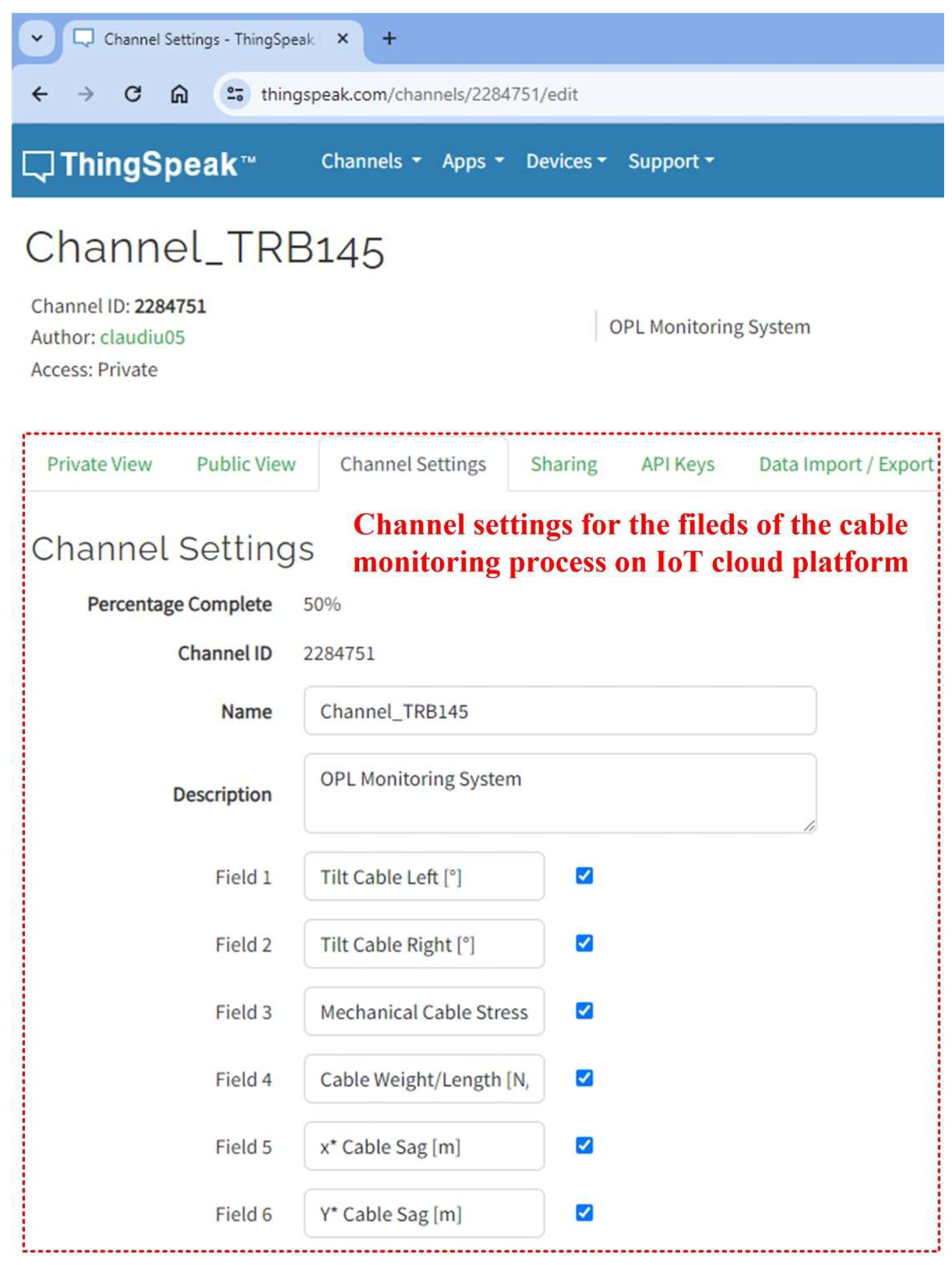
Figure 27.
LabVIEW client software application for writing cable monitoring process data to IoT cloud platform: (a) LabVIEW software block diagram for sending data; (b) IoT LabVIEW client software interface.
Figure 27.
LabVIEW client software application for writing cable monitoring process data to IoT cloud platform: (a) LabVIEW software block diagram for sending data; (b) IoT LabVIEW client software interface.
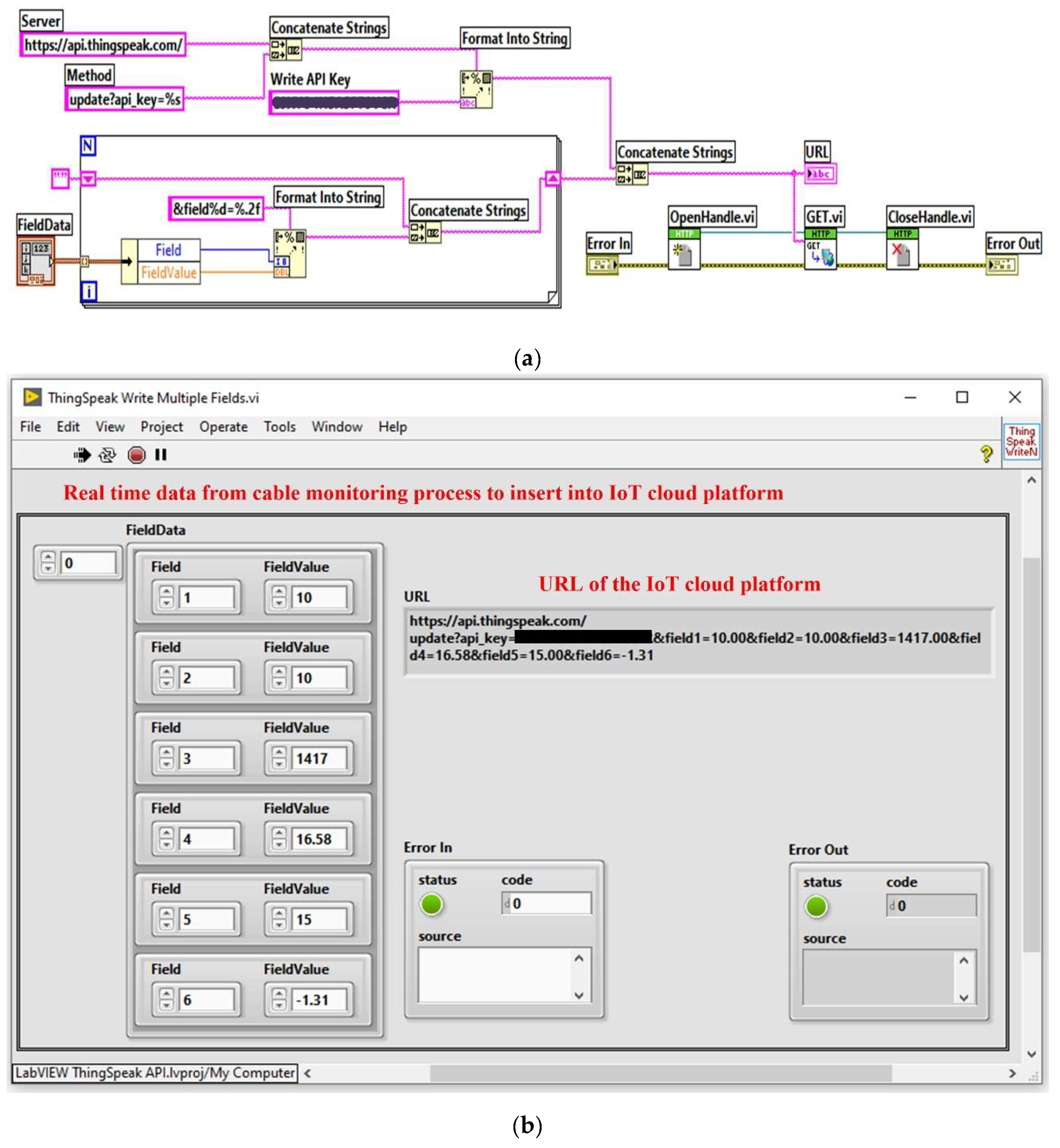
Figure 28.
ThinkSpeak IoT cloud platform with data from OPL–cables monitoring process – charts of the fields with the real-time data.
Figure 28.
ThinkSpeak IoT cloud platform with data from OPL–cables monitoring process – charts of the fields with the real-time data.
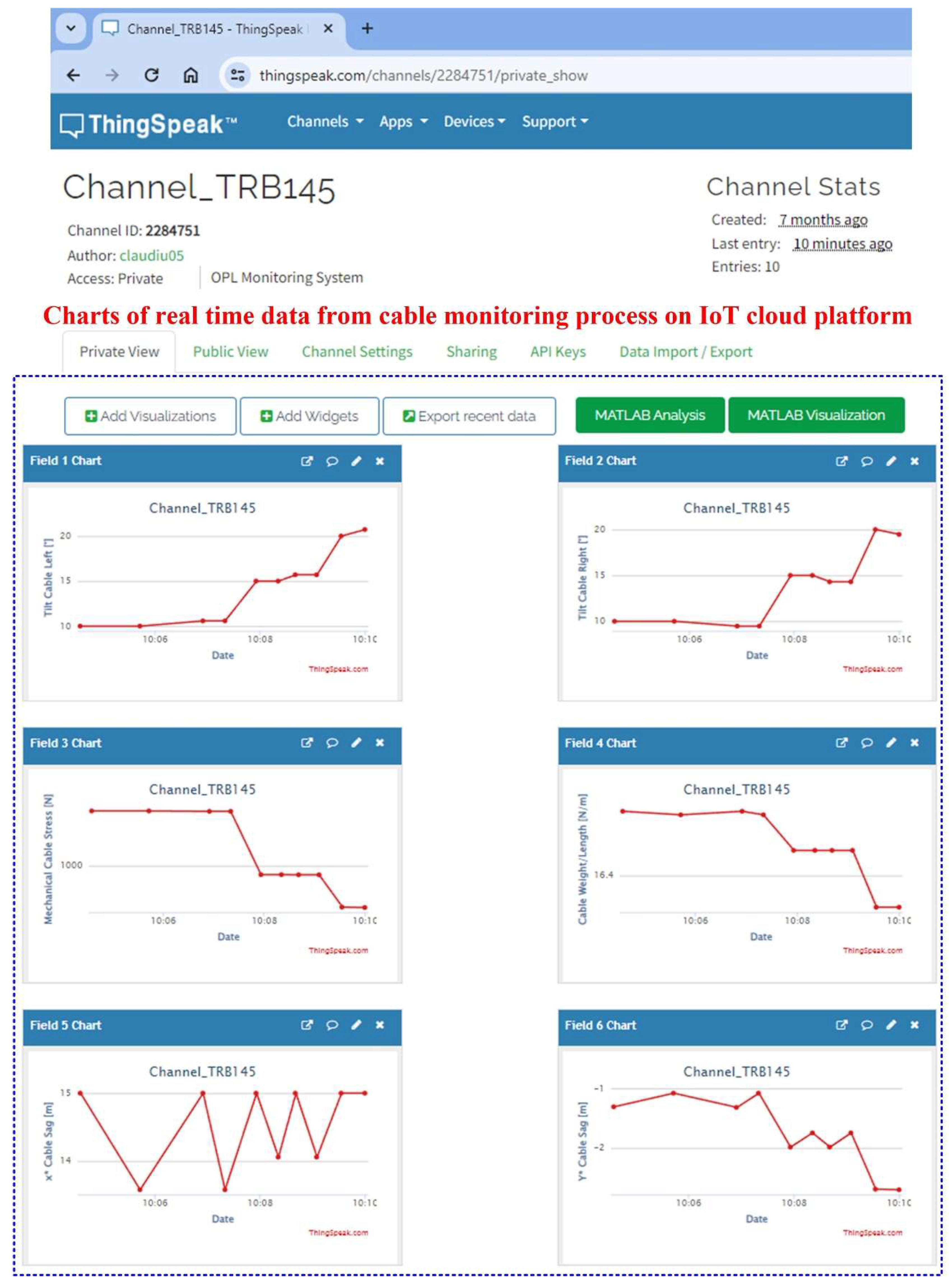

Table 1.
OPL cable sag measurement methods.
| Sag measurement method | Features |
|---|---|
| Detection method | This type of method is simple. It has a high degree of accuracy and the need for on-site operators precludes the possibility of real-time monitoring. |
| GPS | This type of method is accurate, but involves complex algorithms that are difficult to implement and is costly. |
| Temperature and cable tension | This type of method is relatively inexpensive, it involves the measurement of too many parameters, the calculation algorithm is complex and it introduces large errors. |
| Projection technique | This type of method is easy to implement, it requires specialised photographers, image processing is difficult and it introduces large errors. |
| Line slope | This type of method is relatively simple, inexpensive, the calculation algorithm is simple and it introduces small errors. |
Table 2.
Input data and calculated data using cable sag calculation algorithm – Example 1.
| Input data | Output data | |||||
|---|---|---|---|---|---|---|
| Cable run L [m] | Cable weight G [N] | Cable rise h [m] | Mechanical cable stress H [N] | Cable weight/length w [N/m] | x* | y* |
| 100 | 150 | 0 | 4235 | 14.9 | 50 | −4.39 |
Table 3.
Input data and calculated data using cable sag calculation algorithm – Example 2.
| Input data | Output data | |||||
|---|---|---|---|---|---|---|
| Cable run L [m] | Cable weight G [N] | Cable rise h [m] | Mechanical cable stress H [N] | Cable weight/length w [N/m] | x* | y* |
| 100 | 150 | 0.5 | 4235 | 14.90 | 35.81 | −2.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



