Submitted:
23 May 2024
Posted:
24 May 2024
You are already at the latest version
Abstract
In this work, an improved collocation method based on the Bernoulli polynomials is presented to solve the Volterra integral equation (VIE) of the second kind. The main idea of the proposed method is to improve the results of the classic Bernoulli collocation method (BCM) by dividing the interval into some sub-intervals and considering the collocation points on each of them. Here, the zeros of the shifted Chebyshev polynomials (SCPs) are considered as collocation points. Then, BCM is applied step by step from the first sub-interval to the last one. By this process, a system of algebraic equations is attained for each sub-interval that could be easily solved. Convergence of the scheme is analyzed. For the purpose of demonstrating the validity, applicability, and efficiency of the suggested scheme several numerical examples are provided. Numerical results illustrate that the accuracy of the improved Bernoulli collocation method (IBCM) is more than BCM.
Keywords:
Bernoulli polynomials
; shifted Chebyshev polynomials
; Bernoulli collocation method (BCM)
; Improved Bernoulli collocation method (IBCM)
; Volterra integral equation s (VIEs)
1. Introduction
Most of the problems of science and technology can be treated with the aid of theories of ordinary and partial differential equations (PDEs). However, there are better methods called the theory of integral equations to solve these problems. Years ago, these types of equations were a hot topic in the minds of mathematicians. If the unknown function is given inside the integration symbol in an equation, it is named an integral equation, which is regarded as a common type of functional equation. The theory of integral equations is one of the most operative mathematical tools for solving problems in pure and applied mathematics, mathematical physics, mechanical vibrations, and fields related to science and technology. However, the real development of the theory of integral equations started with the attempts of the Italian mathematician Vito Volterra and the Swedish mathematician Fredholm. Volterra was the first person who realized the significance of the theory of integral equations and systematically paid attention to it. In 1896, he presented the first general scheme for solving a category of linear integral equations characterized by a variable that appears at the upper bound of the integral. Interest in VIEs has been growing in recent years. These equations arise in many physical applications, for example see [1,2,3,4,5,6,7,8,9,10,11,12]. Here, a numerical scheme based on Bernoulli polynomials is developed to solve VIEs of the second kind.
Bernoulli polynomials have a significant role in many areas of mathematical analysis, like the theory of modular forms [14], the theory of distributions in p-adic analysis [13], the polynomial expansions of analytic functions [15], and so on. Some applications of these polynomials in mathematical physics are related with the theory of the KdV equation [16], solving Lamé equation [17], and in the field of vertex algebra [18].
The collocation method as a numerical method for solving all kinds of functional equations and real world problems has always been the interest and attention of mathematicians. Many authors have presented different kinds of collocation method during past decades. For example, Doha et al. [19] proposed a Jacobi–Gauss–Lobatto collocation scheme, used in relationship with the fourth order implicit Runge–Kutta method as a numerical algorithm for approximating solutions of nonlinear Schrödinger equations (NLSE). Nemati [20] solved Volterra–Fredholm integral equations applying Legendre collocation method. His method is based upon shifted Legendre polynomials approximation. Then, utilizing the shifted Gauss–Legendre as collocation nodes reduces the Volterra–Fredholm integral equations to the solution of a matrix equation. Mirzaee and Hoseini [21] proposed a new matrix method on the basis of Fibonacci polynomials and collocation points for numerically solving the Volterra–Fredholm integral equations. Ren and Tian [22] proposed a scheme to solve a boundary value problem for Kirchhoff type of nonlinear integro-differential equation numerically. Gouyandeh et al. [23] by using the Tau-Collocation method approximated solution of the nonlinear Volterra-Fredholm-Hammerstein integral equations. Aziz et al. [24], based on Haar wavelet, provided a new collocation method for numerical solution of 3D elliptic PDEs with Dirichlet boundary conditions. Çelik [25], by utilizing Chebyshev wavelet collocation method, studied free vibration problems of non-uniform Euler–Bernoulli beam under different supporting conditions. Samadyar and Mirzaee [26] presented orthonormal BCM to approximate the linear singular stochastic Itô-VIEs. Biçer and Yalçinbaş [27] an approximate solution of the telegraph equation applying BCM. Alijani et al. [28] investigated systems of fuzzy fractional differential equations numerically with a lateral type of the Hukuhara derivative and its generalization. Wang et al. [29] presented a new collocation method for evaluating the 2D elliptic PDEs. Singh [30] used Jacobi collocation method to solve the fractional advection-dispersion equation arising in porous media. Kumbinarasaiah et al. [31] presented an integration operational matrix applying the Bernoulli wavelet and suggested a new scheme named the Bernoulli wavelet collocation method (BWCM). In [32], the authors investigated a space-time Sinc-collocation method for treating the fourth-order nonlocal heat model appearing in viscoelasticity. Laib et al. [33], based on the using Taylor polynomials, suggested an algorithm to construct a collocation solution for approximating the solution of 2D-VIEs. Wang et al. [34], by utilizing the zeros of Chebyshev polynomial as collocation points, proposed a new collocation method to solve the second kind VIE.
In this work, based on Bernoulli polynomials, a new collocation method is suggested to approximate numerically VIEs of the second kind. The main goal of the suggested scheme is to improve the results of the classic BCM by dividing the interval into some sub-intervals and considering the collocation points on each of them. Here, the zeros of the SCPs are considered as collocation points. Then, BCM is applied step by step from the first sub-interval to the last one. By this process, a system of algebraic equations is attained for each sub-interval that could be easily solved using computing software. At last, the approximate solution is obtained as a piece-wise function. This idea is very effective. Although, we have tested this idea on BCM in this work but we guess that all collocation methods mentioned above can be improved by this idea.
The rest of the paper is organized as follows. In section 2, Bernoulli polynomials are introduced and their features are stated. In section 3, the proposed scheme is explained. The convergence analysis is discussed in in section 4. In section 5, numerical results are presented. At last, conclusions are given in section 5.
2. Bernoulli Polynomials
The traditional Bernoulli polynomials is often characterized by the following exponential generating functions [35]:
The Bernoulli polynomials of th degree are determined in the interval as follows [36]
where is the Bernoulli number for each . We write some polynomials like
Bernoulli polynomials have following important properties [37].
- .
- .
- .
- .
- .
- .
2.1. Function Approximation
A square integrable function can be expressed according to of Bernoulli polynomials as
and the truncated series is
where
is the vector of unknown coefficients and
is the vector of Bernoulli polynomials.
3. Description of the Proposed Scheme
In this section, the proposed scheme is described to deal with the VIEs of the second kind. The main purpose of the suggested method is to improve the results of the classic collocation method by dividing the interval into some sub-intervals and applying the collocation method in each of them.
3.1. Solving VIEs of the Second Kind by BCM
Regard the following VIE of the second kind.
where is the unknown function, while and the kernel are known functions, and is a given continuous function which is nonlinear with respect to .
Substituting Eq. (3) in Eq. (6) leads to
Now, we use the collocation method to determine unknowns , . Let be the collocation points. Here, we apply the zeros of SCPs of degree in the interval as collocation points. For example for , the collocation points are , ,
0.9330. Then, we will a system of nonlinear algebraic equation that could be easily solved computer software.
In the case of , that is the equation is linear, by rearranging this equation in terms of , we have
By substituting collocation points in Eq. (8) we get
The last equation is a system of algebraic equations with unknown coefficients , that could be stated in the following matrix form.
In which
vector is defined as Eq. (4) and
3.2. Solving VIEs of the Second Kind by IOBCM
In order to apply the idea of the suggested scheme, first we divide the interval into sub-intervals as where . Then, we consider the approximation of by Bernoulli polynomials of degree in each sub-interval as follows.
where , , are unknown coefficients to be determined and is define as Eq. (4) and
According to Eq. (10), the approximate solution is considered as a piece-wise function in the proposed method.
In general, there are unknowns, , to be determined. To find these unknowns, we do as follows.
For finding the unknowns , suppose that . Then, according to Eq. (10) the approximate solution in the interval is
Substituting Eq. (12) in Eq. (6) leads to
We use the collocation method to determine unknowns . Let be the zeros of SCPs of degree in the interval as collocation points. For example for , and the collocation points are , , , , , , , , , , , . Then, a system of nonlinear algebraic equation is produced that could be easily solved.
In the case of , that is the equation is linear, equation (13) could be stated as follows.
By substituting collocation points in Eq. (13) we will have
This equation is a system of algebraic equations with unknown coefficients , which can be written in the following matrix form.
In which
vector is defined as Eq. (11) for and
By using the coefficients , which have been determined in the previous stage, we can find the unknowns , as follows.
Suppose that . Then, Substituting Eq. (10) for in Eq. (6) gives
This equation can be written as follows.
Let be the zeros of SCPs of degree in the interval as collocation points. Substituting the collocation points in Eq. (17) leads to the following relation.
This equation is a system of algebraic equations with unknown coefficients , . This system could be stated in the following matrix form.
where
vector is defined as Eq. (11) for and
Now, we can present a general formula to find the unknowns in in the interval .
Suppose that . Then, according to Eq. (12) the approximate solution in the interval is
By substituting Eq. (19) in Eq. (6) we will have
This equation would be stated as follows.
Let be the zeros of SCPs of degree in the interval as collocation points. Substituting the collocation points in Eq. (20) yields
where
vector is defined as Eq. (11) and
Therefore, if we continue this process step by step and find the unknowns in the next subintervals using the coefficients which have been determined so far, then all unknowns will be obtained finally.
For finding the unknowns in the last interval, suppose that . Then according to Eq. (10) the approximate solution in this interval is
Substituting Eq. (21) in Eq. (6) gives
This equation can be written in terms of as follows.
Let be the zeros of SCPs of degree in the interval as collocation points. By substituting these points in Eq. (22) we will have
This equation is a system of algebraic equations with unknown coefficients , which can be stated in a matrix form as follows.
In which
vector is defined as Eq. (11) for and
Eventually, we can calculate the solution by the following piece wise function.
where is the approximation of the exact solution .
4. Convergence Analysis
Here, the convergence of the suggested scheme is discussed. For this purpose, we first recall one of the important theorems related to the residual interpolation error by Chebyshev nodes.
Theorem 1. Let be a sufficiently smooth function on and be the space of polynomials of order Also, let be the interpolating polynomials of at points which are the zeros of the SCP of degree on . Then, the following relation is established.
where .
Proof. [38].
According to the last theorem, we can write
Now, Assume that
Applying this upper bound to Eq. (25) and considering the approximations for Chebyshev interpolation nodes [39] leads to
Theorem 2. Suppose that defined in Eq. (3), be the best approximation of real sufficiently smooth function by Bernoulli polynomials. Then a real constant exists such that
Proof. According to the definition, is the best approximation of provided that
Particularly, if then according to Eq. (27), we get
Hence, Eq. (28) is proved.
According to Eq. (28), it can be written
So, when which implies that . Therefore, the collocation method based on the Bernoulli polynomials is convergent.
- Theorem 3. Assume that be the approximate solution of Eq. (6) in the interval , andwhere . Also, the nonlinear term satisfies the Lipschitz condition as follows:
Then, there is an upper error bound as follows.
where
Proof. The approximate solution of Eq. (6) in the interval could be stated as
From Eqs. (6) and (35), we get
Then, we have
By using Eq. (34), for , we have
So,
Now, regard the approximate solution of Eq. (6) in the interval as follows.
From Eqs. (6) and (36), we get
Then, we have
Using Eq. (34), for and also Eq. (36) leads to
Therefore, we have
For the approximate solution of Eq. (6) in the interval we can write
From Eqs. (6) and (36), we can write
Then, we have
Using Eq. (34), for and also Eq. (38) leads to
Finally, we have
By comparing the upper error bounds obtained in previous steps, it can be concluded that an upper error bound for is as follows:
Therefore, Eq. (33) is established.
5. Numerical Results
In this section, several examples are presented to demonstrate the validity, applicability, and efficiency of the suggested scheme. Whole the numerical calculations were carried out utilizing Matlab software (R2018b).
- Example 1. Consider the following linear the second kind VIE [40].with exact solution .
The numerical results for example one are presented in Table 1, Table 2 and Table 3. In Table 1, the absolute errors of the IBCM with are compared with those of the BCM for two different values of ( and ) at five points in the interval . Table 2 and Table 3 present comparisons similar to what has been presented in Table 1. Although, in these tables, the number of subintervals in the IBCM is increased. In Table 2, is 10 while in Table 3, it is doubled. Investigating Table 1, Table 2 and Table 3 reveals that in both methods, the higher the polynomial degree (), the higher the accuracy. On the other hand, the IBCM is more accurate than the BCM. For example, for , the order of error in the IBCM with (Table 3) is e-12 while the order of error in the BCM is e-3 (Table 1). In Table 3, for , the order of error in the IBCM is e-16 while the order of error in the BCM is e-8.
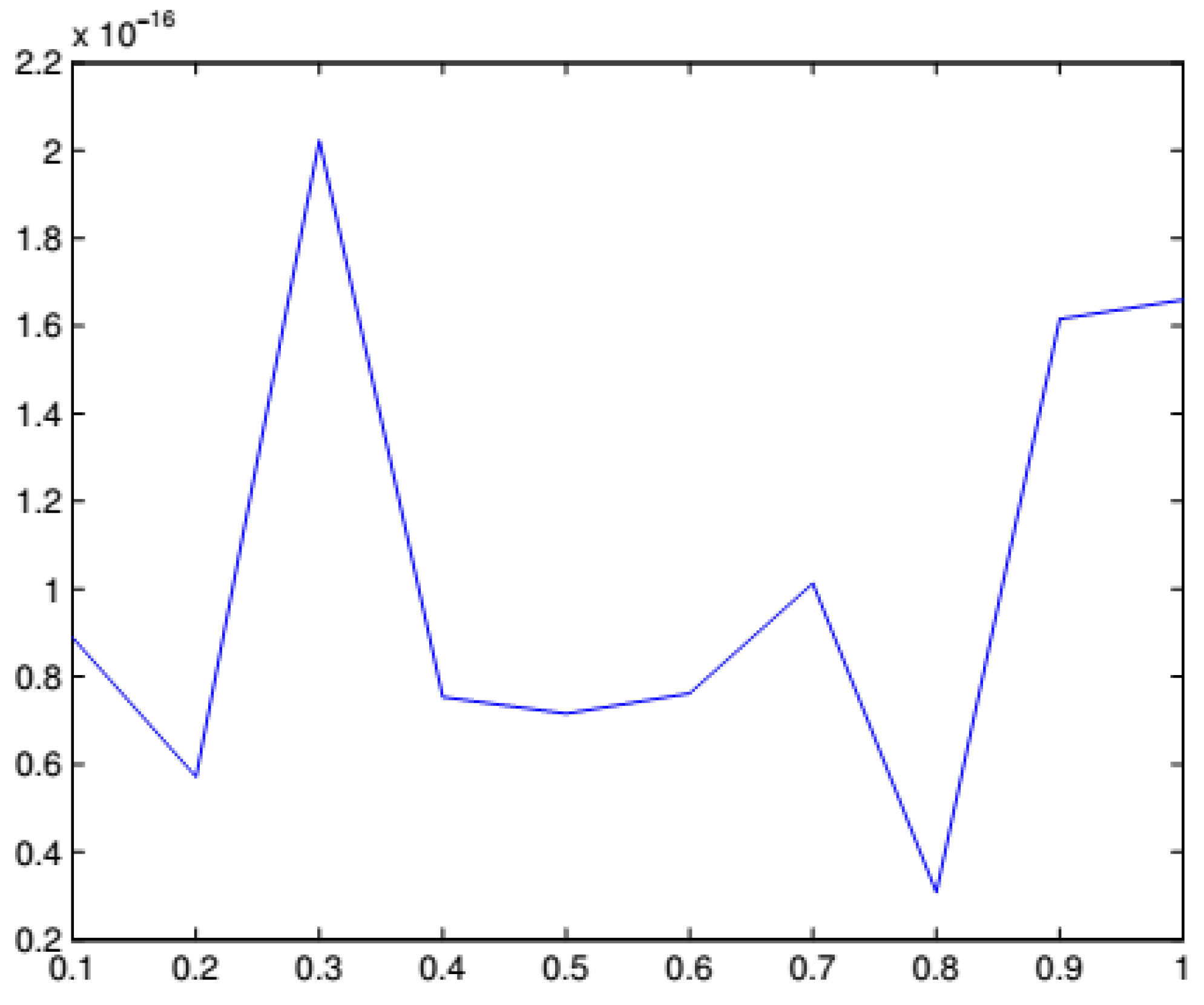
The precision of the IBCM can be ameliorated by adding the number of subintervals, while is fixed. For example, for , the order of error in the IBCM with (Table 1) is e-9 while it is e-10 and e-12 for (Table 2) and (Table 3), respectively. Thee error of IBCM is plotted in Figure 1 for and .
This equation was solved in [12] by Bernstein’s approximation. The authors computed errors for where is the polynomial degree. The order of error was e-10 for while in our propose method, the order of error is e-16 for .
Example 2. Regard the following nonlinear the second kind VIE [23].
with exact solution
The results for the above example are presented in Table 4 and Table 5. In Table 4, the absolute errors of the IBCM with are compared with those of the BCM for two different values of ( and ). Investigating this table reveals that in both methods, the higher the polynomial degree (), the higher the accuracy. On the other hand, the IBCM is more precise than the BCM. In Table 5, numerical results for both IBCM and BCM are presented for and they are compared with the results reported in [23]. According to this table the accuracy of the suggested method is more than the method of [23]. Thee error of IBCM is plotted in Figure 2 for and .
Example 3. Regard the following nonlinear the second kind VIE [23].
with exact solution The numerical results for above example are presented in Table 6. In this table, numerical results for both IBCM and BCM are presented for and they are compared with the results reported in [23]. According to this table the accuracy of the suggested method is more than the method of [23]. Thee error of IBCM is plotted in Figure 3 for and .
Example 4. Regard the following nonlinear the second kind VIE [41].
with exact solution The numerical results for this example are presented in Table 7 and Table 8. In Table 7, exact and approximate solutions of Eq. (43) by IBCM and Modification of hat functions [41] are presented. Comparison the results shows that IBCM is more accurate. In Table 8, the absolute errors of the IBCM with are compared with those of the BCM for . Investigating this table reveals that in both methods, the higher the polynomial degree (), the higher the accuracy. On the other hand, the IBCM is more accurate than the BCM. Thee error of IBCM is plotted in Figure 1 for and .
Figure 3.
The absolute error of the IBCM with and for example 3.
6. Conclusions
In this work, an improved collocation method based on the Bernoulli polynomials was presented to solve the VIE of the second kind. In classic collocation methods, regardless of the type of polynomial used, collocation points are scattered throughout the whole interval and numerical computations are performed at once on the given interval. The main goal of the suggested method is to improve the results of the classic BCM by dividing the interval into some sub-intervals and considering the collocation points on each of them. Here, the zeros of the SCPs are considered as collocation points. Then, BCM is applied step by step from the first sub-interval to the last one. By this process, a system of algebraic equations is attained for each sub-interval which can be lightly solved using computing software. At last, the approximate solution is obtained as a piece-wise function. Convergence of the scheme was also analyzed. Several numerical examples are presented in order to illustrate the validity, applicability, and efficiency of the suggested method. Numerical results show that in both methods, the higher the accuracy. On the other hand, IBCM is more accurate than the BCM. The precision of the IBCM can be ameliorated by adding the number of subintervals while the degree of the polynomial is fixed. We suggest that to test idea on other kinds of collocation methods.
References
- Bartoshevich, MA. On a heat conduction problem. Inz- Fiz Z 1975, 28, 340–6. [Google Scholar] [CrossRef]
- Yousefi, SA. Numerical solution of Abel’s integral equation by using Legendre wavelets. Appl Math Comput 2006, 175, 574–80. [Google Scholar] [CrossRef]
- Galdi GP, Pileckas 2 K, Silvestre AL. On the unsteady Poiseuille flow in a pipe. Z Angew Math Phys 2007, 58, 994–1007. [Google Scholar] [CrossRef]
- Baratella, P. A Nystrom interpolant for some weakly singular linear Volterra integral equations. Comput Appl Math 2009, 231, 725–34. [Google Scholar] [CrossRef]
- Ding HJ, Wang HM, Chen WQ. Analytical solution for the electroelastic dynamics of a nonhomogeneous spherically isotropic piezoelectric hollow sphere. Arch Appl Mech 2003, 73, 49–62. [Google Scholar] [CrossRef]
- Kit GS, Maksymuk AV. The method of Volterra integral equations in contact problems for thin-walled structural elements. J Math Sci 1998, 90, 1863–7. [Google Scholar] [CrossRef]
- Maleknejad K, Aghazadeh N. Numerical solution of Volterra integral equations of the second kind with convolution kernel by using Taylor-series expansion method. Appl Math Comput 2005, 161, 915–22. [Google Scholar]
- Maleknejad K, Tavassoli Kajani M, Mahmoudi Y. Numerical solution of linear Fredholm and Volterra integral equations of the second kind by using Legendre wavelet. Kybern Int J Syst Math 2003, 32, 1530–9. [Google Scholar]
- Babolian E, Davari A. Numerical implementation of Adomian decomposition method for linear Volterra integral equations of the second kind. Appl Math Comput 2005, 165, 223–7. [Google Scholar]
- Rashidinia J, Zarebnia M. Solution of Voltera integral equation by the Sinc-collection method. J Comput Appl Math 2007, 206, 801–13. [Google Scholar] [CrossRef]
- Saberi-Nadjafi J, Heidari M. A quadrature method with variable step for solving linear Volterra integral equations of the second kind. Appl Math Comput 2007, 188, 549–54. [Google Scholar]
- Tahmasbi, A. A new approach to the numerical solution of linear Volterra integral equations of the second kind. Int J Contemp Math Sci 2008, 3, 1607–10. [Google Scholar]
- Monsky, P. p-adic Analysis and Zeta Functions. Kinokuniya;
- Zagier, D. Introduction to modular forms. InFrom number theory to physics 1992 (pp. 238-291). Berlin, Heidelberg: Springer Berlin Heidelberg.
- Boas RP, Buck RC. Polynomial expansions of analytic functions. Springer Science & Business Media; 2013 Jun 29.
- Fairlie DB, Veselov AP. Faulhaber and Bernoulli polynomials and solitons. Physica D: Nonlinear Phenomena. 2001, 152, 47–50. [Google Scholar]
- Grosset MP, Veselov AP. Elliptic Faulhaber polynomials and Lamé densities of states. International Mathematics Research Notices. 2006, 2006, 62120. [Google Scholar]
- Doyon B, Lepowsky J, Milas A. Twisted vertex operators and Bernoulli polynomials. Communications in Contemporary Mathematics. 2006, 8, 247–307. [Google Scholar] [CrossRef]
- Doha EH, Bhrawy AH, Abdelkawy MA, Van Gorder RA. Jacobi–Gauss–Lobatto collocation method for the numerical solution of 1+ 1 nonlinear Schrödinger equations. Journal of Computational Physics. 2014, 261, 244–55. [Google Scholar] [CrossRef]
- Nemati, S. Numerical solution of Volterra–Fredholm integral equations using Legendre collocation method. Journal of Computational and Applied Mathematics. 2015, 278, 29–36. [Google Scholar] [CrossRef]
- Mirzaee F, Hoseini SF. Application of Fibonacci collocation method for solving Volterra–Fredholm integral equations. Applied Mathematics and Computation. 2016, 273, 637–44. [Google Scholar] [CrossRef]
- Ren Q, Tian H. Numerical solution of the static beam problem by Bernoulli collocation method. Applied Mathematical Modelling. 2016, 40, 8886–97. [Google Scholar] [CrossRef]
- Gouyandeh Z, Allahviranloo T, Armand A. Numerical solution of nonlinear Volterra–Fredholm–Hammerstein integral equations via Tau-collocation method with convergence analysis. Journal of Computational and Applied Mathematics. 2016, 308, 435–46. [Google Scholar] [CrossRef]
- Aziz I, Asif M. Haar wavelet collocation method for three-dimensional elliptic partial differential equations. Computers & Mathematics with Applications. 2017, 73, 2023–34. [Google Scholar]
- Çelik, İ. Free vibration of non-uniform Euler–Bernoulli beam under various supporting conditions using Chebyshev wavelet collocation method. Applied Mathematical Modelling. 2018, 54, 268–80. [Google Scholar] [CrossRef]
- Samadyar N, Orthonormal MF. Bernoulli polynomials collocation approach for solving stochastic Itô–Volterra integral equations of Abel type. Int. J. Numer. Model. 2019, 2019, e2688. [Google Scholar]
- Erdem Biçer K, Yalçinbaş S. Numerical solution of telegraph equation using Bernoulli collocation method. Proceedings of the National Academy of Sciences, India Section A: Physical Sciences. 2019, 89, 769–75.
- Alijani Z, Baleanu D, Shiri B, Wu GC. Spline collocation methods for systems of fuzzy fractional differential equations. Chaos, Solitons & Fractals. 2020, 131, 109510.
- Wang F, Zhao Q, Chen Z, Fan CM. Localized Chebyshev collocation method for solving elliptic partial differential equations in arbitrary 2D domains. Applied Mathematics and Computation. 2021, 397, 125903. [Google Scholar] [CrossRef]
- Singh, H. Jacobi collocation method for the fractional advection-dispersion equation arising in porous media. Numerical methods for partial differential equations. 2022, 38, 636–53. [Google Scholar] [CrossRef]
- Kumbinarasaiah S, Preetham MP. Applications of the Bernoulli wavelet collocation method in the analysis of MHD boundary layer flow of a viscous fluid. Journal of Umm Al-Qura University for Applied Sciences. 2023, 9, 1–4. [Google Scholar] [CrossRef]
- Yang X, Wu L, Zhang H. A space-time spectral order sinc-collocation method for the fourth-order nonlocal heat model arising in viscoelasticity. Applied Mathematics and Computation. 2023, 457, 128192. [Google Scholar] [CrossRef]
- Laib H, Boulmerka A, Bellour A, Birem F. Numerical solution of two-dimensional linear and nonlinear Volterra integral equations using Taylor collocation method. Journal of Computational and Applied Mathematics. 2023, 417, 114537. [Google Scholar] [CrossRef]
- Wang Z, Hu X, Hu B. A collocation method based on roots of Chebyshev polynomial for solving Volterra integral equations of the second kind. Applied Mathematics Letters. 2023, 146, 108804. [Google Scholar] [CrossRef]
- Bazm S, Azimi MR. Numerical solution of a class of nonlinear Volterra integral equations using Bernoulli operational matrix of integration. Acta Univ M Belii Ser Math. 2015, 23, 35–56. [Google Scholar]
- Razzaghi M, Ordokhani Y, Haddadi N. Direct method for variational problems by using hybrid of block-pulse and Bernoulli polynomials. Romanian Journal of Mathematics and Computer Science. 2012, 2, ]1–7. [Google Scholar]
- Sahu PK, Mallick B. Approximate solution of fractional order Lane–Emden type differential equation by orthonormal Bernoulli’s polynomials. International Journal of Applied and Computational Mathematics. 2019, 5, 89. [Google Scholar]
- Gasca M, Sauer T. On the history of multivariate polynomial interpolation. InNumerical Analysis: Historical Developments in the 20th Century 2001 Jan 1 (pp. 135-147). Elsevier.
- 39. Mason JC, Handscomb DC. Chebyshev polynomials. CRC press;
- Maleknejad K, Hashemizadeh E, Ezzati R. A new approach to the numerical solution of Volterra integral equations by using Bernstein’s approximation. Communications in Nonlinear Science and Numerical Simulation. 2011, 16, 647–55. [Google Scholar] [CrossRef]
- Mirzaee F, Hadadiyan E. Numerical solution of Volterra–Fredholm integral equations via modification of hat functions. Applied Mathematics and Computation. 2016, 280, 110–23. [Google Scholar] [CrossRef]
Figure 1.
The absolute error of the IBCM with and for example 1.
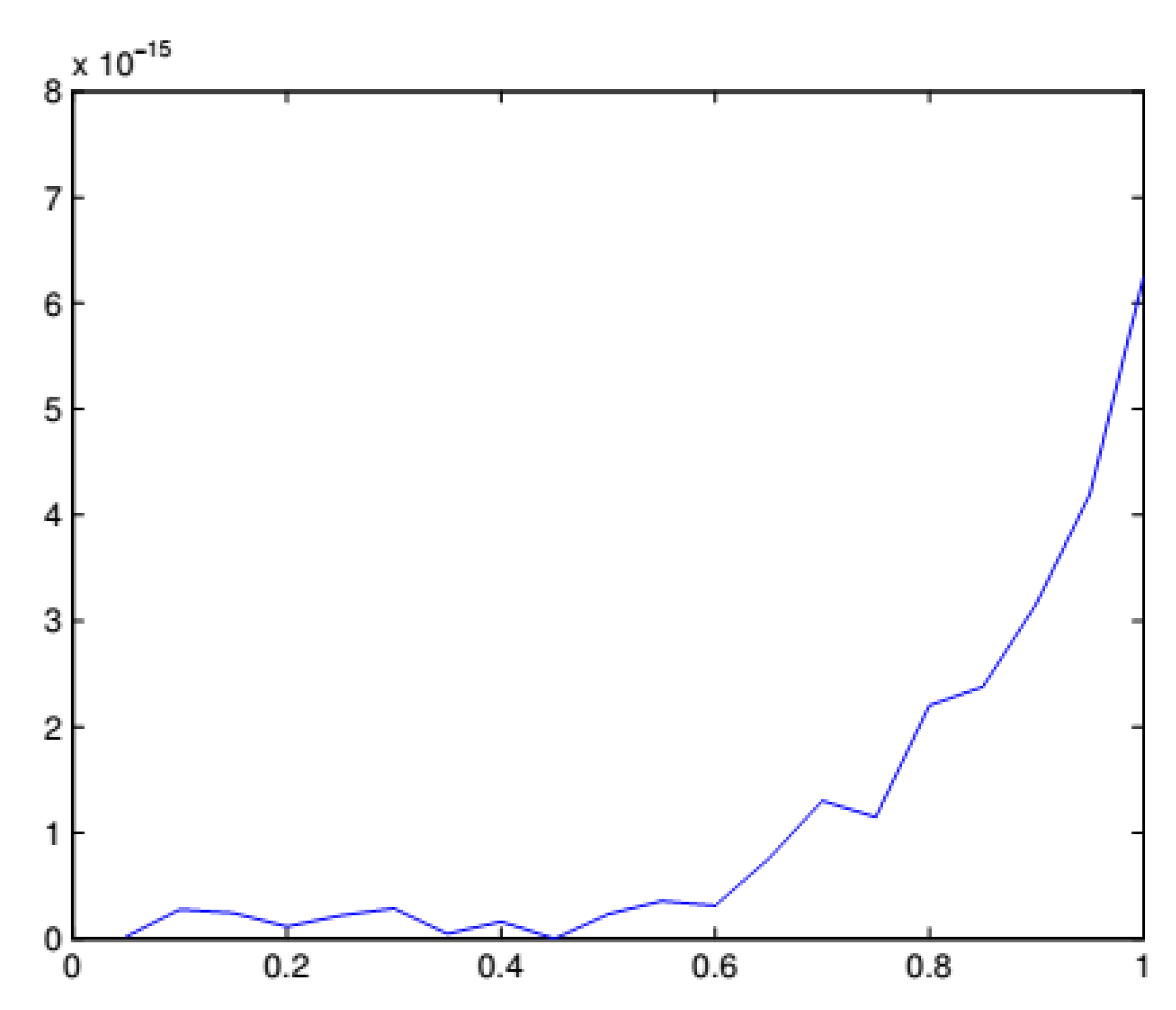
Figure 2.
The absolute error of the IBCM with and for example 2.
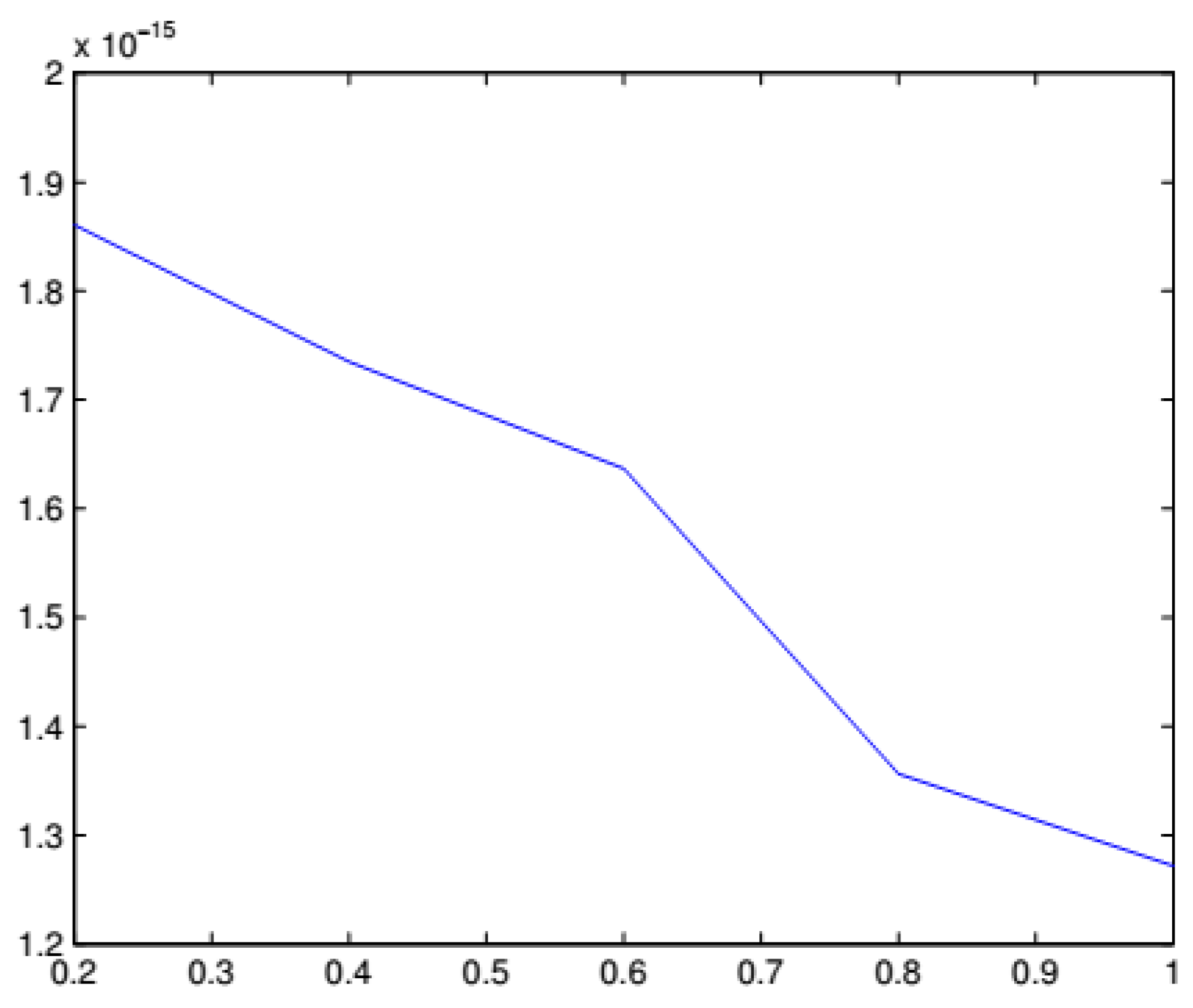
Figure 3.
The absolute error of the IBCM with and for example 3.
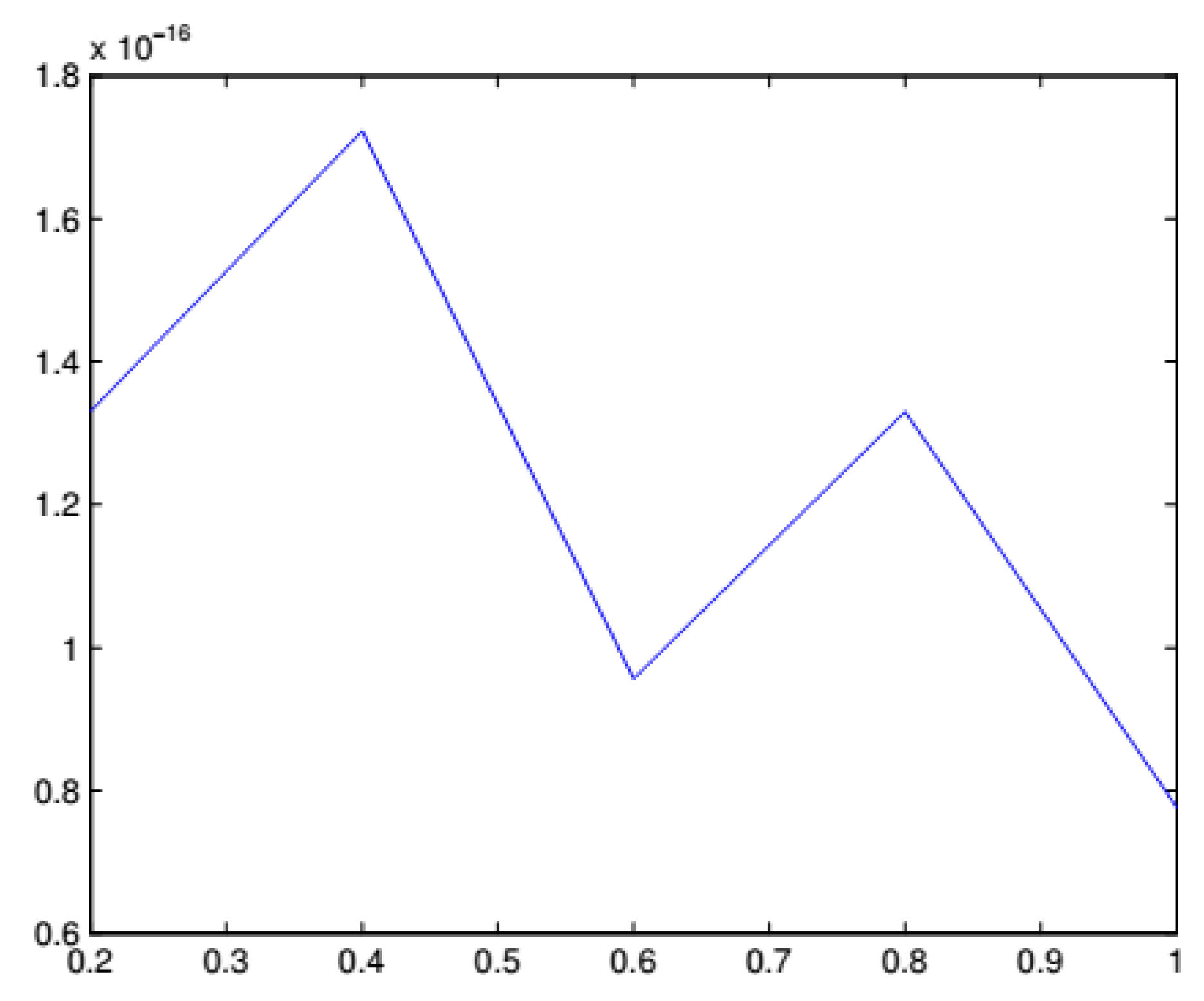

Table 1.
The absolute error of the IBCM with and BCM for example 1.
| IBCM | BCM | IBCM | BCM | |
| 0.15 | 4.5550 e-6 | 1.7512 e-3 | 2.1507 e-10 | 6.0265 e-6 |
| 0.35 | 1.2274 e-5 | 2.7788 e-3 | 8.2472 e-10 | 7.7318 e-6 |
| 0.55 | 1.9155 e-5 | 7.9400 e-4 | 1.3400 e-9 | 3.1127 e-6 |
| 0.75 | 2.4561 e-5 | 7.4072 e-4 | 1.8279 e-9 | 6.0874 e-6 |
| 0.95 | 2.7405 e-5 | 2.9919 e-3 | 2.2953 e-9 | 3.2830 e-6 |
Table 2.
The absolute error of the IBCM with and BCM for example 1.
| IBCM | BCM | IBCM | BCM | |
| 0.1 | 3.2037 e-7 | 7.5868 e-4 | 9.4060 e-11 | 8.0179 e-6 |
| 0.2 | 8.2926 e-7 | 2.4247 e-3 | 2.5412 e-10 | 1.6861 e-6 |
| 0.3 | 1.3229 e-6 | 2.9075 e-4 | 4.1141 e-11 | 6.2700 e-6 |
| 0.4 | 1.8168 e-6 | 2.4544 e-3 | 5.6437 e-11 | 7.0803 e-6 |
| 0.5 | 2.2875 e-6 | 1.4077 e-4 | 7.1154 e-11 | 9.1337 e-7 |
| 0.6 | 2.7390 e-6 | 2.0181 e-4 | 8.5158 e-11 | 6.5449 e-6 |
| 0.7 | 3.1703 e-6 | 6.4116 e-4 | 9.8331 e-11 | 8.4324 e-6 |
| 0.8 | 3.5826 e-6 | 5.1679 e-4 | 1.1058 e-10 | 1.9262 e-6 |
| 0.9 | 3.9812 e-6 | 1.2557 e-3 | 1.2185 e-10 | 9.6383 e-6 |
Table 3.
The absolute error of the IBCM with and BCM for example 1.
| IBCM | BCM | ||
| 0.1 | 4.0059 e-13 | 2.2043 e-16 | 3.0790 e-9 |
| 0.2 | 9.0170 e-13 | 1.0987 e-16 | 1.1425 e-8 |
| 0.3 | 1.3914 e-12 | 2.4797 e-16 | 2.2238 e-9 |
| 0.4 | 1.8717 e-12 | 1.8339 e-16 | 1.2202 e-8 |
| 0.5 | 2.3303 e-12 | 1.9098 e-16 | 1.8206 e-9 |
| 0.6 | 2.7679 e-12 | 2.8180 e-16 | 1.0911 e-8 |
| 0.7 | 3.1737 e-12 | 1.2333 e-15 | 3.8603 e-9 |
| 0.8 | 3.5513 e-12 | 2.2374 e-15 | 1.1863 e-9 |
| 0.9 | 3.8946 e-12 | 3.2271 e-15 | 6.6650 e-11 |
Table 4.
The absolute error of the IBCM with and BCM for example 2.
| IBCM | BCM | IBCM | BCM | |
| 0.1 | 3.1892 e-8 | 2.8966 e-4 | 6.6974 e-13 | 5.4474 e-7 |
| 0.2 | 3.1164 e-8 | 3.2696 e-4 | 6.5893 e-13 | 4.4242 e-7 |
| 0.3 | 2.999 e-8 | 1.0663 e-4 | 6.4054 e-13 | 5.2662 e-7 |
| 0.4 | 2.8363 e-8 | 1.3136 e-4 | 6.1384 e-13 | 1.7092 e-7 |
| 0.5 | 2.6204 e-8 | 2.4239 e-4 | 5.7933 e-13 | 6.3315 e-7 |
| 0.6 | 2.3438 e-8 | 1.7382 e-4 | 5.3553 e-13 | 3.2899 e-7 |
| 0.7 | 1.9935 e-8 | 3.9408 e-5 | 4.8214 e-13 | 3.2364 e-7 |
| 0.8 | 1.5477 e-8 | 2.7993 e-4 | 4.1705 e-13 | 3.7016 e-7 |
| 0.9 | 9.7004 e-9 | 3.5403 e-4 | 3.3804 e-13 | 3.4501 e-7 |
Table 5.
Numerical results for example 2.
| Tau-collocation method [23] for | |||
| IBCM () | BCM | ||
| 0 | 1.9404 e-15 | 7.3181 e-10 | 2.2046 e-11 |
| 0.2 | 1.8559 e-15 | 3.3474 e-10 | 1.8409 e-11 |
| 0.4 | 1.7551 e-15 | 1.0685 e-10 | 8.5021 e-12 |
| 0.6 | 1.6675 e-15 | 2.2912 e-11 | 1.8216 e-13 |
| 0.8 | 1.3226 e-15 | 1.5064 e-10 | 2.8661 e-13 |
| 1 | 1.3194 e-15 | 4.6726 e-10 | 4.8397 e-12 |
Table 6.
Numerical results for example 3.
| Tau-collocation method [23] for | |||
| IBCM () | BCM | ||
| 0 | 2.8147 e-15 | 1.3193 e-14 | 2.2046 e-11 |
| 0.2 | 1.0679 e-16 | 9.5633 e-15 | 1.8409 e-11 |
| 0.4 | 1.7370 e-16 | 1.0877 e-14 | 8.5021 e-12 |
| 0.6 | 1.7400 e-16 | 1.0815 e-14 | 1.8216 e-13 |
| 0.8 | 9.5338 e-17 | 9.7200 e-15 | 2.8661 e-13 |
| 1 | 1.1892 e-16 | 1.3953 e-14 | 4.8397 e-12 |
Table 7.
Comparison of exact solution and approximate solution of example 4.
| Exact solution | IBCM( and ) | Modification of hat functions [41] | |
| 0.1 | 0.3807520 | 0.3807520 | 0.3807489 |
| 0.2 | 0.6488067 | 0.6488067 | 0.6488007 |
| 0.3 | 0.8533517 | 0.8533517 | 0.8533529 |
| 0.4 | 0.9743646 | 0.9743646 | 0.9743612 |
| 0.5 | 1.0000000 | 1.0000000 | 1.0000000 |
| 0.6 | 0.9277484 | 0.9277484 | 0.9277518 |
| 0.7 | 0.7646823 | 0.7646823 | 0.7646811 |
| 0.8 | 0.5267638 | 0.5267638 | 0.5267698 |
| 0.9 | 0.2372820 | 0.2372820 | 0.2372851 |
Table 8.
The absolute error of the IBCM and BCM with for example 4.
| IBCM () | BCM | |
| 0.1 | 3.1892 e-8 | 1.1337 e-5 |
| 0.2 | 3.1164 e-8 | 1.2295 e-6 |
| 0.3 | 2.9999 e-8 | 9.4557 e-6 |
| 0.4 | 2.8363 e-8 | 9.5335 e-6 |
| 0.5 | 2.6204 e-8 | 1.0443 e-6 |
| 0.6 | 2.3438 e-8 | 7.8075 e-6 |
| 0.7 | 1.9935 e-8 | 9.0435 e-6 |
| 0.8 | 1.5477 e-8 | 6.9274 e-7 |
| 0.9 | 9.7004 e-9 | 7.9773 e-6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



