
Submitted:
28 May 2024
Posted:
29 May 2024
You are already at the latest version
Abstract
This paper investigates the performance of dual hop UAV-assisted communication channels, employing a decode and forward relay architecture. The system utilizes Terahertz (THz) communication in the primary hop and Visible Light Communication (VLC) in the secondary hop. We conduct a
thorough analysis by deriving closed-form expressions for end to end bit error rate (BER). Furthermore, we employ a Monte Carlo approach to generate best fitting curves and validate our numerical expressions with simulation results. Evaluation via BER and outage probability demonstrates the proposed system’s effectiveness. The outcomes of this research offer valuable insights into the feasibility and limitations of UAV-assisted THz-
VLC systems.
Keywords:
visible light communication
; Thz communications
; Outage Probability
; BER
1. Introduction
Wireless communication systems have seen significant transformations since their origin. Today, advanced technologies such as autonomous vehicles, smart devices, and the Internet of Things (IoT) are ubiquitous, all hinging on wireless communication to meet the growing demand for high bandwidth and fast data rates. Over the years, mobile communication has progressed from the first generation (1G) through successive iterations—2G, 3G, 4G, and now 5G. Additionally, Wi-Fi standards (IEEE 802.11) for short-range wireless communication have rapidly advanced, particularly in terms of capacity, reliability, data rate, and medium access methods, in order to meet the needs of the trend for growing demand of data hungry applications over the past decades that follows the Edholm’s law, this law states that the data rate and bandwidth will double every 1.5 years. Following a similar trend, the total mobile network traffic is forecast to reach approximately 563 EB per month by the end of 2029. Predicted traffic increase until 2029 assumes that the early adoption of XR-type services, such as AR, VR, and mixed reality (MR), will occur in the latter part of the projection period [1]. This trend is causing a radio frequency crunch and forcing the research community to explore ways to acquire larger bandwidth and higher data rates. Terahertz (THz) communications and Visible Light Communications (VLC) has the potential to be the feeders for this growing demand for data rates and bandwidth [2].
VLC is emerging as a promising technology to complement traditional RF communication systems, addressing the increasing demand for higher data rates and broader bandwidth. VLC utilizes the visible spectrum (400–700 nm), leveraging light-emitting diodes (LEDs) for dual purposes: illumination and high-speed data transmission. This dual functionality makes VLC an attractive solution for environments where RF communication is challenging or restricted, such as in densely populated urban areas, hospitals, and underwater environment [3]. Furthermore, VLC offers several advantages, including immunity to electromagnetic interference, enhanced security due to the line-of-sight nature of light propagation, and the vast, unlicensed visible spectrum, which alleviates the spectrum scarcity issue associated with RF communication [4].
THz communication is another emerging frontier in wireless technology that operates in the frequency range between 0.1 THz and 10 THz, THz communication exploits the untapped spectrum between microwave and infrared frequencies. This enables ultra-high-speed data transmission, which is essential for next-generation applications such as ultra-high-definition video streaming, real-time virtual reality, and advanced scientific imaging. THz waves offer remarkable advantages, including the ability to carry vast amounts of data and support extremely high bandwidth, which is crucial for mitigating the radio frequency spectrum crunch. However, THz communication also presents challenges, such as limited transmission range and significant atmospheric attenuation. To overcome these obstacles, research is focused on developing advanced materials, innovative antenna designs, sophisticated signal processing techniques and use of mobile base stations [5,6].
Due to the limitations of VLC and THz communications, these technologies are often combined with other communication technolgies such as RF, Free Space Optics (FSO) or Power Line Communication (PLC) through the use of suitable relay architectures. Many studies have integrated UAVs into these relay architectures, leveraging their ability to function as mobile base stations and adjust their positions to enhance network reliability and coverage [7,8].
Several studies has been conducted on the interoperability of different communication technologies using decode and forward relay architecture. In terms of VLC, this is combined with either RF or FSO [7,9,10]. There are also studies in which better performance has been achieved by combining all three of them together, for example the authors of [11] did a performance evaluation of a triple-hop decode and forward RF-FSO-VLC system. They derived the closed-form expressions for statistical characteristics of SNR and then used them to derive the expressions for BER and outage probability. The simulation results from this study suggests that the performance of the system is affected by Nakagami-m parameter and pointing errors in different atmospheric turbulence. The authors also found that the performance of indoor VLC is heavily affected by the FoV of the photodiode and the LED luminaris height. In [12] the authors presented a study on dual-hop decode and forward relay for a RF/FSO-VLC system. Here in the first hop FSO and RF reaches the relay node from two different transmitters and then using a selection combined DF relay the end users receive the information using VLC links. The authors derived the expressions for outage probability and BER and performed simulation tests. The results of this study states that in a moderate turbulence environment the BER performance is better when used coherent detection and and in a strong turbulence environment direct detection provides better BER performance.
In terms of THz, similar to VLC several studies has been conducted by combining it with either RF or FSO [13,14]. Some studies have been conducted on the performance improvement by combining all three of them into one system, for example in [6] the authors proposed a hybrid FSO/RF-THz decode and forward relay link. Here an adaptive combining based approach is used for the backhaul network by combining FSO and RF and then through the DF relay the end user receive the information using THz link. The authors derived expressions for performance charateristics of this system and then through simulation results states that this adaptive approach performs better compared to a single-link system.
2. Motivation and Contribution
The literature review underscores the potential of cooperative relay assistance in enhancing overall communication system performance through interoperability among different communication technologies. While considerable research has been conducted on cooperative relay-assisted RF-VLC, RF-THz, VLC-FSO, and FSO-THz configurations, to the best of the authors’ knowledge at the time of writing, no study has been published on the performance analysis of cooperative relay-assisted THz-VLC systems.
Given the notable improvements in system performance achieved through the integration of THz and VLC technologies, this study endeavors to explore the potential benefits of a THz-VLC communication link facilitated by a decode and forward relay architecture. The analysis focuses on BER, with the derivation of closed-form expressions for end-to-end (E2E) metrics, marking the first attempt in the literature to do so.
The main contributions of this paper can be summarized as follows:
- Proposal of a dual-hop UAV-assisted communication system employing a decode and forward relay architecture, utilizing THz communication in the first hop and VLC in the secondary hop.
- Derivation of closed-form expressions for E2E BER with and without the presence of THz pointing errors.
- Presentation of simulation results to investigate the performance of the proposed system. Comparative analysis of BER and outage probability performances between the proposed system and FSO-VLC and RF-VLC configurations is conducted to highlight the advantages of integrating THz with VLC.
3. Synergy and Challenges of UAV Assisted THz-VLC Systems
3.1. Synergy between THz and VLC in UAV Applications
The combination of THz and VLC in UAV applications provides a synergistic approach that harnesses the strengths of both communication methods. THz communication offers extremely high data rates due to the large available bandwidth [5]. This makes it ideal for transmitting large volumes of data quickly from the UAV to a relay point. The requirement for a clear line-of-sight (LoS) for THz communication is less of an issue for UAVs operating at high altitudes, where there are typically minimal obstructions [8]. On the other hand, VLC, which also requires a LoS, can leverage the vast and unregulated visible light spectrum to provide high-speed communication indoors. VLC can be seamlessly integrated into existing LED lighting systems, providing dual functionality of illumination and data transmission within buildings [4].
Moreover, UAVs can effectively utilize THz communication in outdoor environments where they operate above many potential obstructions. This high-altitude advantage complements VLC’s indoor efficiency, where controlled lighting conditions mitigate issues such as multipath fading and interference. The environmental adaptability of this dual-hop system is a significant advantage, with THz providing robust outdoor communication capabilities and VLC ensuring reliable indoor connectivity.
3.2. Challenges in Integrating THz with UAV Platforms
The challenges associated with integrating THz with UAV platforms are illustrated in Figure 1 and are described below.
UAVs are prone to wobbling and unpredictable movements due to wind, turbulence, and rapid changes in direction. These factors can disrupt the THz signal transmission, affecting the reliability and stability of communication links [15].
THz communication systems and the associated payloads are power-intensive, requiring significant energy to operate. This high energy consumption reduces the UAV’s flight time and operational efficiency, necessitating advanced power management solutions [16].
Developing transceivers capable of operating efficiently at THz frequencies involves intricate design and engineering challenges. These transceivers must handle high data rates, maintain signal integrity, and operate within the limited size and weight constraints of UAVs [17].
THz signals are highly susceptible to blockages from physical objects such as buildings, trees, and even atmospheric particles. These obstructions can significantly degrade signal quality and limit the effective range and reliability of THz communication systems [17].
Deploying a large number of UAVs in a confined area can lead to interference and signal congestion. Managing the spectrum and ensuring seamless communication among multiple UAVs require sophisticated coordination and interference mitigation strategies [15].
The propagation characteristics of THz signals are influenced by environmental conditions such as humidity, temperature, and atmospheric composition. This variability introduces uncertainty in the communication medium, complicating the prediction and optimization of THz signal performance [16].
3.3. Challenges in Using VLC for Relay-Destination Link
The challenges associated with using VLC for relay-destination Link are illustrated in Figure 2 and are described below.
VLC relies heavily on a clear line-of-sight between the transmitter and receiver. Obstacles such as furniture, walls, and even people can block the light path, leading to interruptions in the communication link [18].
The effective range of VLC systems is typically confined to the immediate vicinity of the light source. This limitation restricts the coverage area and necessitates multiple light sources for broader coverage, increasing complexity and cost [19].
Ambient light sources, such as sunlight or other artificial lighting, can cause interference with VLC signals. This interference can degrade signal quality and reduce communication reliability, especially in environments with varying lighting conditions [20].
Maintaining efficient energy consumption while ensuring adequate illumination and communication quality poses a challenge. Balancing the dual role of lighting and data transmission requires advanced control mechanisms to optimize power usage without compromising performance [4].
The modulation bandwidth of LEDs used in VLC is limited, restricting the data transmission rates. Enhancing the modulation capabilities of LEDs to support higher data rates involves sophisticated engineering and can impact the cost and complexity of the system [18].
VLC systems are susceptible to eavesdropping and unauthorized access, as the communication medium (light) can easily be intercepted by unintended receivers within the coverage area. Implementing robust security measures to protect data transmission is essential to ensure privacy and prevent data breaches [20].
Addressing these challenges involves innovative approaches in materials science and communication technology design to create efficient, compact, and lightweight systems suitable for UAV deployment. While this paper does not directly address the challenges involved in integrating THz-VLC with UAV platforms, it provides a foundational framework and valuable insights. The study sets the stage for future research to tackle these integration challenges, guiding the development of effective solutions.
4. Selected Use Cases and Opportunities
In this section, four selected use cases of UAV assisted THz-VLC systems will be discussed.
4.1. Health Care
UAV assisted THz-VLC systems can be utilized in a healthcare setting to transmit patient medical information to a nearby laboratory as depicted in Figure 3. Within the hospital, VLC will be employed for communication to prevent interference with medical equipment. Information from the sender is transmitted over a VLC uplink to the DF relay. The relay, using the DF protocol, retransmits the information to the UAV using THz communication. At the UAV node, an Amplify-and-Forward (AF) relay architecture is used to enhance the SNR quality of the transmitted signal by amplifying the received signal and then forward it to the DF relay positioned at the laboratory. The DF relay decodes the information and retransmits it to the lab technician inside the lab through a downlink VLC. Utilizing VLC ensures that interference with sensitive equipment in the hospital and laboratory is avoided, while THz communication enables high-speed information transmission.
4.2. Underwater
The information can be transmitted from the onshore base station to an Autonomous Underwater Vehicle (AUV) via a floating buoy equipped with DF relay architecture as depicted in Figure 4. The signal from the onshore base station to the floating buoy will utilize THz communication, while the retransmission from the floating buoy to the AUV will utilize laser-based VLC. Lasers are preferred for deep-sea communication over LEDs due to their ability to extend the link distance. However, the use of lasers introduces pointing errors to the system due to the high turbulence experienced underwater. Appropriate mitigation techniques should be employed to maximize the system’s reliability in this setting.
4.3. Military
In this scenario, ground troops operating in a hostile environment could establish a secure communication link with the command centre using a relay station deployed in an intermediate location using a triple-hop DF and AF protocols based THz-VLC system as depicted in Figure 5. The first hop of the communication link would utilize THz uplink communication between the ground troops and the relay station. THz waves offer high bandwidth and can penetrate various obstacles encountered in the battlefield, allowing for reliable communication over short to medium distances. The relay station will amplify and forward the information to the relay at the command centre again through THz communication. In the third and final hop the relay at the command center will decode the information and retransmit it to the team inside the command centre using VLC downlink. The use of VLC ensures that the communication remains covert and immune to detection by adversaries.
4.4. Video Streaming
In this scenario, the UAV captures video footage and transmits it to a relay node using THz communication. THz frequencies are ideal for high-bandwidth applications like video streaming due to their ability to support high data rates, enabling the transmission of high-resolution video with minimal latency. The relay node, positioned to maintain a stable connection with the UAV, receives the video data and then forwards it to the end user inside the building using VLC as illustrated in Figure 6.
Using VLC for the final leg of transmission inside the building is advantageous for several reasons. VLC can leverage existing lighting infrastructure, such as LED lights, to transmit data, reducing the need for additional hardware. Furthermore, VLC provides a secure communication channel as the light waves are confined within the room, minimizing the risk of eavesdropping from outside the building. This dual-mode communication approach, combining THz for long-range, high-bandwidth transmission and VLC for secure, indoor delivery, ensures efficient and reliable video streaming from the UAV to the end user.
A similar use case will be analyzed in details in the next few sections.
5. System Model
The system model comprises a dual-hop THz-VLC decode and forward relaying system. In this model, the first hop utilizes a THz channel to transmit information from the UAV (source node) to the relay node. The relay node decodes the received signal and retransmits it through VLC inside the building, as shown in Figure 7.
The system-level equations are described below:
where, represents the source power, denotes the relay power, signifies the THz channel from source to relay, denotes the VLC channel from relay to destination, x symbolizes the information signal, stands for the signal encoded by the relay, while and represent the noise from source to relay and relay to destination respectively [7].
5.1. THz Channel Model
The THz channel gain is represented by:
where , , and denote the free space path loss, molecular absorption loss, and misalignment fading effect, respectively.
5.1.1. Free Space Path Loss (FSPL)
The Line-of-sight (LOS) free space path loss can be expressed using the Friis equation [5] as,
where d represents the distance between the transmitter and the receiver, f is the carrier frequency, and and signify the gain of the transmitter and receiver antenna, respectively.
5.1.2. Molecular Absorption Loss
Molecular absorption loss refers to the attenuation of THz waves due to the absorption of specific molecules in the transmission window. Molecules such as and absorb a portion of the energy emitted by THz signals, leading to divisions in the THz frequency spectrum [21]. When represent the absorption coefficient, the absorption loss can be modeled as,
5.1.3. Misalignment Fading Effect
THz transceivers with directional antenna systems are susceptible to building sway and environmental factors, resulting in misaligned antenna beams and pointing errors. Considering a receiver with a circular aperture area of radius a, the transmitter emits a symmetric beam characterized by a waist at a distance d. Then the equivalent beam width is expressed as,
where . The misalignment gain is expressed as,
where represents the fraction of power collected by the receiver, expressed as . The Probability Density Function (PDF) of the misalignment fading effect is expressed as,
where denotes the ratio between the equivalent beam width and the standard deviation of pointing error at the receiver, expressed as .
5.2. VLC Channel Model
In this study, it is assumed that the LOS path is the sole means of communication between the Photodiode (PD) and the Light-Emitting Diode (LED). The expression for the LOS direct current (DC) channel gain in VLC is:
where denotes the area of the photodiode, represents the LED radiation distribution function, D is the distance between the transmitter and the receiver, signifies the filter gain, represents the concentrator gain, and denotes the FoV of the photodiode. The radiation distribution function, considering the number of radiation patterns, m, and the radiation angle of the LED, , can be expressed as:
6. Performance Analysis
If is the source power and is the noise power corresponding to , then the SNR for THz link with the presence of pointing errors can be expressed as,
Considering a scenario with no pointing errors in the THz link, the SNR of the THz link can be expressed as,
If is the relay power and is the noise power, then the SNR for VLC link can be expressed as,
Lemma 1.
Consider a dual-hop decode-and-forward relay-assisted THz-VLC link. Assuming the presence of pointing errors in the THz link, deterministic fading in the VLC link, and utilizing BPSK modulation for the THz link along with OOK modulation for the VLC link, the E2E BER can be expressed as in Equation (14):
Proof.
Given that misalignment fading stands as the sole random fading component, assuming represents the average SNR of an uncoded communication system as referenced in [5], the instantaneous BER of the THz link can be expressed as:
Here, denotes the tail distribution function of the Gaussian distribution, and signifies the expected value of the misalignment PDF. Consequently, the BER expression can be formulated as:
Drawing parallels with [5], this study employs the Chernoff exponential bound to approximate the Gaussian Q function, expressed as . Incorporating this approximation, the BER expression can be reformulated as:
where is the lower incomplete gamma function. Given that the VLC link uses an uses a deterministic path loss model, the BER can be expressed as,
The E2E BER for the THz-VLC link, can be obtained through the unified error rate expression in [22] as,
Lemma 2.
Consider a dual-hop decode-and-forward relay-assisted THz-VLC link. Assuming deterministic fading in the entire THz-VLC link, and utilizing BPSK modulation for the THz link along with OOK modulation for the VLC link, the E2E BER can be expressed as:
Proof.
The instantaneous BER of the THz link considering a deterministic fading using BPSK modulation can be expressed as [23],
where is the instantaneous SNR. Substituting (12) in (21) gives,
Substituting (18) and (22) in (19) gives (20). In the context of the system model, outage occurs when either the SNR of the THz link or the VLC link falls below or equals to a predefined threshold, denoted as , which can be derived as,
Consequently, the independency of the instantaneous SNR for each of link is defined in equations (11) and (13), which can be further expand and rewritten as,
□
7. Simulation Results
In this section, simulation is employed to validate the analysis conducted and to assess the performance of the cooperative relay-assisted THz-VLC link in terms of BER and outage probability.
The parameters listed in Table 1 have been selected based on credible literature sources.
Figure 8 illustrates the influence of pointing errors on the BER performance of the proposed THz-VLC scheme. An increase in BER corresponding to heightened pointing errors highlights the system’s sensitivity to alignment inaccuracies. The system demonstrates optimal performance under ideal conditions without pointing errors, underscoring the critical need for precise alignment. Additionally, the close match between simulated BER and theoretical BER in the absence of pointing errors validates the theoretical framework presented in Lemma 2. This correlation confirms the robustness and accuracy of the theoretical model in predicting system performance under ideal conditions. For the remainder of the simulations in this study, a jitter variance of is utilized, as referenced in [5].
In Figure 9, the BER performance is compared across three different communication paradigms: RF-VLC, FSO-VLC, and THz-VLC. The first link from the source to the relay (using RF, THz, or FSO) employs BPSK modulation, while the subsequent VLC link uses OOK. This figure illustrates that RF-VLC and FSO-VLC outperform THz-VLC at lower SNR conditions. This is mainly due to the shorter wavelengths of THz signals compared to RF and optical signals, making them more susceptible to absorption by atmospheric gases and attenuation from obstacles, resulting in higher signal loss and degradation at lower SNR levels. However, as the SNR increases, THz-VLC exhibits superior performance, achieving a BER of at a significantly lower SNR compared to FSO-VLC and RF-VLC. The disadvantages of the THz link, such as higher absorption and attenuation, diminish with increasing SNR. Additionally, THz signals offer higher bandwidth and data rates compared to RF and optical signals, allowing THz-VLC to leverage this advantage more effectively with higher SNR, leading to improved BER performance.
Furthermore, in Figure 9, the simulated BER for the THz-VLC link aligns closely with the theoretical BER, providing further validation for Lemma 1.
An assessment was conducted by varying the distances for the second hop over VLC while maintaining a constant distance for the first hop (THz, RF, FSO). The results are illustrated in Figure 10.
As the relay-destination distance increases, the BER correspondingly rises due to higher attenuation and other losses over longer distances. An interesting observation emerges with increasing relay-destination link distance: the BER discrepancy between THz-VLC and the other systems notably diminishes under lower SNR conditions. This indicates that at extended distances, even under lower SNR conditions, THz-VLC has the potential to outperform RF-VLC and FSO-VLC. Furthermore, as shown in Figure 9, THz-VLC maintains its superiority over FSO-VLC and RF-VLC at higher SNR levels. This is because THz-VLC demonstrates resilience against the challenges posed by longer distances, even under lower SNR conditions, thereby narrowing the performance gap between THz-VLC and other systems.
These results suggest that in scenarios where the VLC link distance is greater, incorporating THz into the system yields superior performance, even under lower SNR conditions, compared to integrating FSO or RF.
Figure 11 illustrates the outage performance of the proposed THz-VLC system under varying pointing errors. The trend from the BER comparison of the same repeats here for outage. This highlights pointing error as a significant factor influencing system performance, with lower pointing error contributing to improved system efficiency. Specifically, the system exhibits superior outage performance under the assumption of no pointing error. This indicates that maintaining precise alignment in the THz-VLC link is crucial for minimizing the likelihood of outages and ensuring reliable communication. A pottential solution to this could be to dynamically optimize the position of the UAV to minimize the pointing errors.
Figure 12 illustrates the comparison of outage probability for the proposed system (THz-VLC) with FSO-VLC and RF-VLC across varying threshold SNRs (). A clear trend emerges wherein the outage probability increases with rising threshold SNR for all configurations. This is expected because higher threshold SNRs set more stringent requirements for the minimum acceptable signal quality, making it harder to meet these criteria and thus increasing the likelihood of an outage.
Notably, despite having the highest threshold SNR, the THz-VLC system exhibits superior performance compared to FSO-VLC and RF-VLC, even when those systems are operating at their lowest threshold SNRs. This suggests that the THz-VLC system is more resilient and capable of maintaining lower outage probabilities even under more challenging conditions. The superior performance of the THz-VLC system can be attributed to its higher bandwidth and data rate capabilities, which allow it to handle higher SNR thresholds more effectively than RF and FSO systems.
8. Future Directions
Future research could explore several improvements and new technologies to enhance the performance and versatility of the THz-VLC system as illustrated in Figure 13.
8.1. Advanced Modulation Schemes and Error Correction Codes
Using advanced modulation schemes like Quadrature Amplitude Modulation (QAM) can boost data rates and make THz-VLC systems more efficient. Employing Low-Density Parity-Check (LDPC) codes or Turbo codes can significantly reduce the Bit Error Rate (BER). For example, LDPC codes excel at correcting errors in high-data-rate communications, which is crucial for maintaining data integrity in THz-VLC links.
8.2. Machine Learning Integration
Machine learning algorithms, such as Reinforcement Learning (RL), can optimize adaptive beamforming and dynamic channel estimation. These algorithms learn from the environment, adjusting the UAV’s position and orientation for optimal signal transmission and reception. A neural network-based channel estimator can predict and compensate for channel variations in real-time, improving the communication link’s robustness against environmental changes and pointing errors.
8.3. Hybrid VLC Systems
Combining LEDs and lasers in a hybrid VLC system can harness the broad coverage of LEDs and the high data rates of lasers. LEDs can provide general illumination and broad coverage, while lasers are used for high-speed data transmission over longer distances. A system where LEDs handle ambient lighting and data broadcasting, while laser diodes are used for point-to-point high-speed communication within the same environment, optimizes overall system performance.
8.4. Metamaterials in THz Transceivers
Using metamaterials to design high-gain, compact THz antennas can enhance signal propagation and reduce losses. Metamaterials can be engineered to focus and direct THz waves more efficiently than conventional materials. Developing a THz antenna with a metamaterial lens that focuses the THz beam, reducing diffraction and improving the signal-to-noise ratio (SNR) for long-distance communication.
8.5. Multi-Hop Relay Networks
Implementing multi-hop relay networks where multiple UAVs act as intermediate relays extends the communication range and improves coverage. Each UAV decodes and forwards the signal to the next UAV or ground station. A cooperative communication strategy where UAVs use decode-and-forward (DF) relays to enhance signal quality and reliability over long distances, ensuring robust communication even in challenging environments.
8.6. Energy Efficiency and Power Management
Developing energy-efficient hardware components and power management algorithms can extend UAV flight times. This includes using low-power electronics and optimizing flight paths to minimize energy consumption. Implementing a solar-powered UAV system that harnesses solar energy to power the communication payload and extend operational time, reducing reliance on battery power alone.
8.7. Interference Mitigation
Employing spectrum management techniques such as Dynamic Spectrum Access (DSA) can mitigate interference and optimize the use of available frequencies. DSA allows the system to dynamically switch to less congested frequencies. Using cognitive radio technology that senses the spectrum environment and adapts the frequency and transmission parameters to avoid interference with other communication systems.
8.8. Environmental Adaptability
Incorporating adaptive mechanisms that adjust to varying environmental conditions such as humidity and temperature can enhance the reliability of THz-VLC communication systems. These mechanisms include real-time monitoring and adjustment of transmission power and beam direction. Developing an adaptive THz communication system that uses environmental sensors to monitor atmospheric conditions and dynamically adjust the transmission parameters to maintain optimal signal quality and reliability.
9. Current Challenges
9.1. Alignment and Stability
UAVs often wobble due to wind and turbulence, which can disrupt THz signal transmission. Implementing stabilization mechanisms such as gyroscopic stabilization can mitigate these issues. Using active stabilization platforms that continuously adjust the UAV’s position to maintain a stable line-of-sight for THz communication.
9.2. High Energy Consumption
THz communication systems consume a lot of power, reducing UAV flight time. Developing low-power THz transceivers and efficient power management algorithms can address this challenge. Utilizing energy-harvesting technologies, such as solar panels, to power UAVs and extend their operational duration.
9.3. Design Complexity of Transceivers
THz transceivers need to handle high data rates while maintaining signal integrity within the size and weight constraints of UAVs. Innovations in material science and compact circuit design are required. Developing miniaturized THz transceivers using advanced semiconductor materials like graphene, which offer high electron mobility and reduced power consumption.
9.4. Susceptibility to Blockages
THz signals are easily blocked by obstacles like buildings and trees. Implementing intelligent path planning and obstacle avoidance algorithms can help maintain communication links. Using machine learning algorithms to predict and avoid potential obstacles in real-time, ensuring an unobstructed communication path.
9.5. Interference and Signal Congestion
In dense deployment scenarios, managing interference and signal congestion is critical. Techniques such as beamforming and frequency hopping can mitigate these issues. Employing beamforming technology to direct the THz signal towards the intended receiver, reducing interference with other communication systems.
9.6. Environmental Variability
THz signal propagation is affected by environmental factors like humidity and temperature. Developing adaptive transmission protocols that adjust to these conditions can enhance reliability. Implementing adaptive modulation and coding schemes that dynamically adjust to environmental conditions, maintaining optimal communication performance.
10. Conclusions
This paper introduced a dual-hop decode and forward relay-assisted communication system that combines terahertz and VLC. In this system, the first hop utilizes a THz channel to transmit information from the UAV (source node) to the relay node. The relay node decodes the received signal and retransmits it through VLC inside the building. This work presented the derivation of closed-form expressions for E2E BER with and without the presence of pointing errors which were validated through simulations results.
Furthermore the study also conducted a comparative analysis of the proposed system with FSO-VLC and RF-VLC in terms of BER and outage probability. The results indicated the superior performance of THz-VLC compared to RF-VLC and FSO-VLC. Varying the VLC link distance while maintaining a constant distance between source-relay indicated that integrating VLC with THz offers more system stability compared to FSO-VLC and RF-VLC due to the resilient nature of THz at higher SNRs.
Furthermore, the results underscore the importance of considering factors such as path loss, pointing errors and molecular absorption when deploying UAV-assisted THz-VLC system. Such considerations are paramount for optimizing performance and ensuring reliable communication in practical deployment scenarios.
Author Contributions
Funding
Conflicts of Interest
References
- Ericsson. (2023) Mobile data traffic forecast – mobility report. Ericsson. Accessed: 28January2024. [Online]. Available: https://www.ericsson.com/en/reports-and-papers/mobilityreport/dataforecasts/.
- Banafaa, M.; Shayea, I.; Din, J.; Azmi, M.H.; Alashbi, A.; Daradkeh, Y.I.; Alhammadi, A. 6G mobile communication technology: Requirements, targets, applications, challenges, advantages, and opportunities. Alexandria Engineering Journal 2023, 64, 245–274. [Google Scholar] [CrossRef]
- Rajahrajasingh, H.; Edirisinghe, S. The Feasibility of Visible Light Communication for Deep Sea Communication. In Proceedings of the 2023 IEEE 17th International Conference on Industrial and Information Systems (ICIIS); 2023; pp. 152–157. [Google Scholar] [CrossRef]
- Rajkumar, S.; Tennakoon, P.; Jayakody, D.N.K. NOMA-PLNC based visible light communications. In Proceedings of the 2023 6th Conference on Cloud and Internet of Things (CIoT). IEEE; 2023; pp. 183–189. [Google Scholar]
- Abdalla, R.; Cooper, A.B. Performance Analysis of LOS THz Systems Under Misalignment and Deterministic Fading. In Proceedings of the 2023 57th Annual Conference on Information Sciences and Systems (CISS); 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Liang, J.; Chen, M.; Ke, X. Performance Analysis of Hybrid FSO/RF-THz Relay Communication System. IEEE Photonics Journal 2024. [Google Scholar] [CrossRef]
- Gunasekar, A.; Kumar, L.B.; Krishnan, P.; Natarajan, R.; Jayakody, D.N.K. All-Optical UAV-Based Triple-Hop FSO-FSO-VLC Cooperative System for High-Speed Broadband Internet Access in High-Speed Trains. IEEE Access 2023. [Google Scholar] [CrossRef]
- Gupta, Y.; Peer, M.; Bohara, V.A. Performance analysis of RF/VLC enabled UAV base station in heterogeneous network. In Proceedings of the 2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC). IEEE; 2021; pp. 1067–1072. [Google Scholar]
- Bravo Alvarez, L.; Montejo-Sánchez, S.; Rodríguez-López, L.; Azurdia-Meza, C.; Saavedra, G. A review of hybrid vlc/rf networks: Features, applications, and future directions. Sensors 2023, 23, 7545. [Google Scholar] [CrossRef]
- Ali, M.F.; Jayakody, D.N.K.; Garg, S.; Kaddoum, G.; Hossain, M.S. Dual-hop mixed fso-vlc underwater wireless communication link. IEEE Transactions on Network and Service Management 2022, 19, 3105–3120. [Google Scholar] [CrossRef]
- Deka, R.; Anees, S. Performance Analysis of a Decode-and-Forward Based Mixed RF–FSO–VLC System. International Journal of Wireless Information Networks 2023, 30, 332–347. [Google Scholar] [CrossRef]
- Deka, R.; Verma, A.; Anees, S. Performance analysis of decode-and-forward based hybrid RF/FSO-VLC system. In Proceedings of the 2019 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS). IEEE; 2019; pp. 1–5. [Google Scholar]
- Bhardwaj, P.; Zafaruddin, S.M. Performance of Hybrid THz and Multiantenna RF System With Diversity Combining. IEEE Systems Journal 2022. [Google Scholar] [CrossRef]
- Sharma, S.; Madhukumar, A. On the Performance of Hybrid THz/FSO system. IEEE Communications Letters 2023. [Google Scholar] [CrossRef]
- Azari, M.M.; Solanki, S.; Chatzinotas, S.; Bennis, M. THz-empowered UAVs in 6G: Opportunities, challenges, and trade-offs. IEEE Communications Magazine 2022, 60, 24–30. [Google Scholar] [CrossRef]
- Amodu, O.A.; Busari, S.A.; Othman, M. Physical layer aspects of terahertz-enabled UAV communications: Challenges and opportunities. Vehicular Communications 2022, 38, 100540. [Google Scholar] [CrossRef]
- Amodu, O.A.; Jarray, C.; Busari, S.A.; Othman, M. THz-enabled UAV communications: Motivations, results, applications, challenges, and future considerations. Ad Hoc Networks 2023, 140, 103073. [Google Scholar] [CrossRef]
- Matheus, L.E.M.; Vieira, A.B.; Vieira, L.F.; Vieira, M.A.; Gnawali, O. Visible light communication: concepts, applications and challenges. IEEE Communications Surveys & Tutorials 2019, 21, 3204–3237. [Google Scholar]
- O’brien, D.C.; Zeng, L.; Le-Minh, H.; Faulkner, G.; Walewski, J.W.; Randel, S. Visible light communications: Challenges and possibilities. In Proceedings of the 2008 IEEE 19th international symposium on personal, indoor and mobile radio communications. IEEE; 2008; pp. 1–5. [Google Scholar]
- Rehman, S.U.; Ullah, S.; Chong, P.H.J.; Yongchareon, S.; Komosny, D. Visible light communication: A system perspective—Overview and challenges. Sensors 2019, 19, 1153. [Google Scholar] [CrossRef] [PubMed]
- Oyeleke, O.D.; Thomas, S.; Idowu-Bismark, O.; Nzerem, P.; Muhammad, I. Absorption, diffraction and free space path losses modeling for the terahertz band. Int. J. Eng. Manuf 2020, 10, 54. [Google Scholar]
- Ali, M.F.; Jayakody, D.N.K.; Ribeiro, M.V. A hybrid UVLC-RF and optical cooperative relay communication system. In Proceedings of the 2021 10th International Conference on Information and Automation for Sustainability (ICIAfS). IEEE; 2021; pp. 13–18. [Google Scholar]
- Goldsmith, A. Wireless communications; Cambridge university press, 2005.
Figure 1.
Challenges in Integrating Terahertz (THz) Communication with Unmanned Aerial Vehicle (UAV) Platforms. This diagram illustrates the key challenges in implementing THz communication systems on UAV platforms, including high energy consumption of payload, design complexity of transceivers, uncertainty of medium, dense UAV deployment, obstructions, and instability and movement of UAVs.
Figure 1.
Challenges in Integrating Terahertz (THz) Communication with Unmanned Aerial Vehicle (UAV) Platforms. This diagram illustrates the key challenges in implementing THz communication systems on UAV platforms, including high energy consumption of payload, design complexity of transceivers, uncertainty of medium, dense UAV deployment, obstructions, and instability and movement of UAVs.
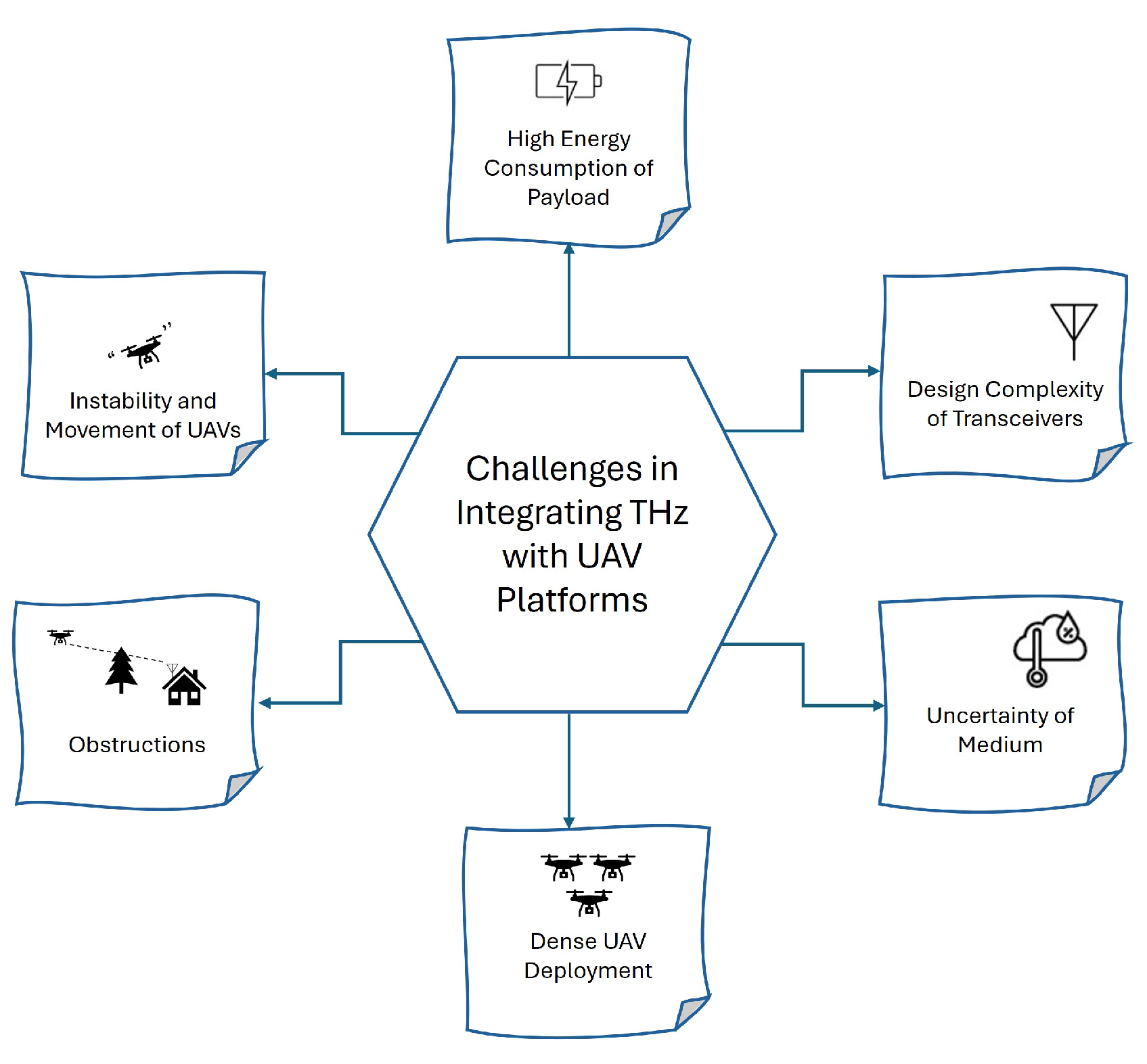
Figure 2.
Challenges in Using Visible Light Communication (VLC) for Relay-Destination Link. This diagram highlights the primary challenges associated with employing VLC in relay-destination links, including line-of-sight requirement, limited range, interference from ambient light, energy efficiency, and modulation bandwidth.
Figure 2.
Challenges in Using Visible Light Communication (VLC) for Relay-Destination Link. This diagram highlights the primary challenges associated with employing VLC in relay-destination links, including line-of-sight requirement, limited range, interference from ambient light, energy efficiency, and modulation bandwidth.
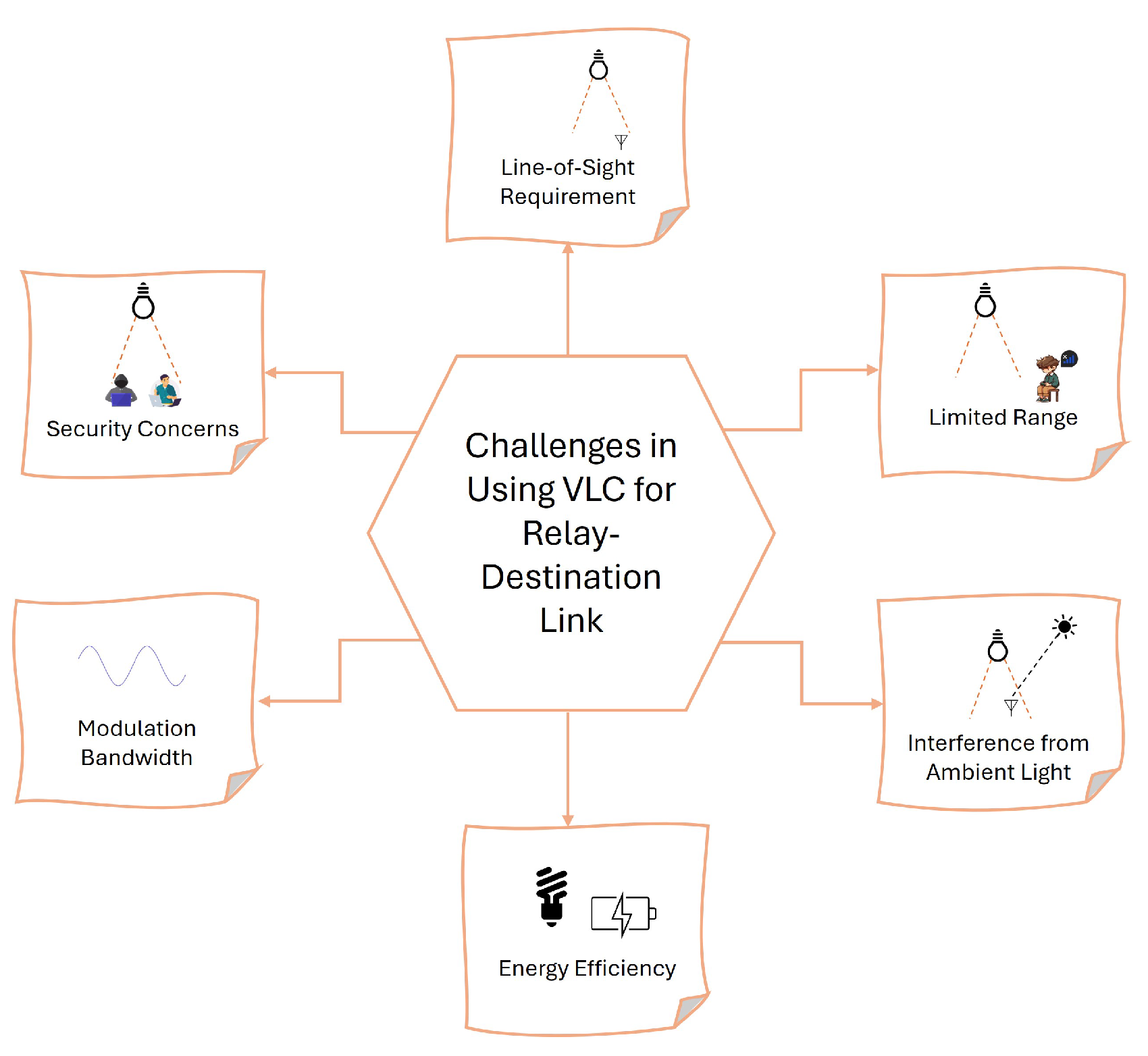
Figure 3.
This diagram illustrates the use of THz and VLC in a healthcare setting. The system employs a UAV to facilitate dual-hop communication between a hospital and a remote clinic, enhancing data transfer capabilities for medical applications. THz communication is utilized for outdoor communication, while indoor utilizes VLC.
Figure 3.
This diagram illustrates the use of THz and VLC in a healthcare setting. The system employs a UAV to facilitate dual-hop communication between a hospital and a remote clinic, enhancing data transfer capabilities for medical applications. THz communication is utilized for outdoor communication, while indoor utilizes VLC.
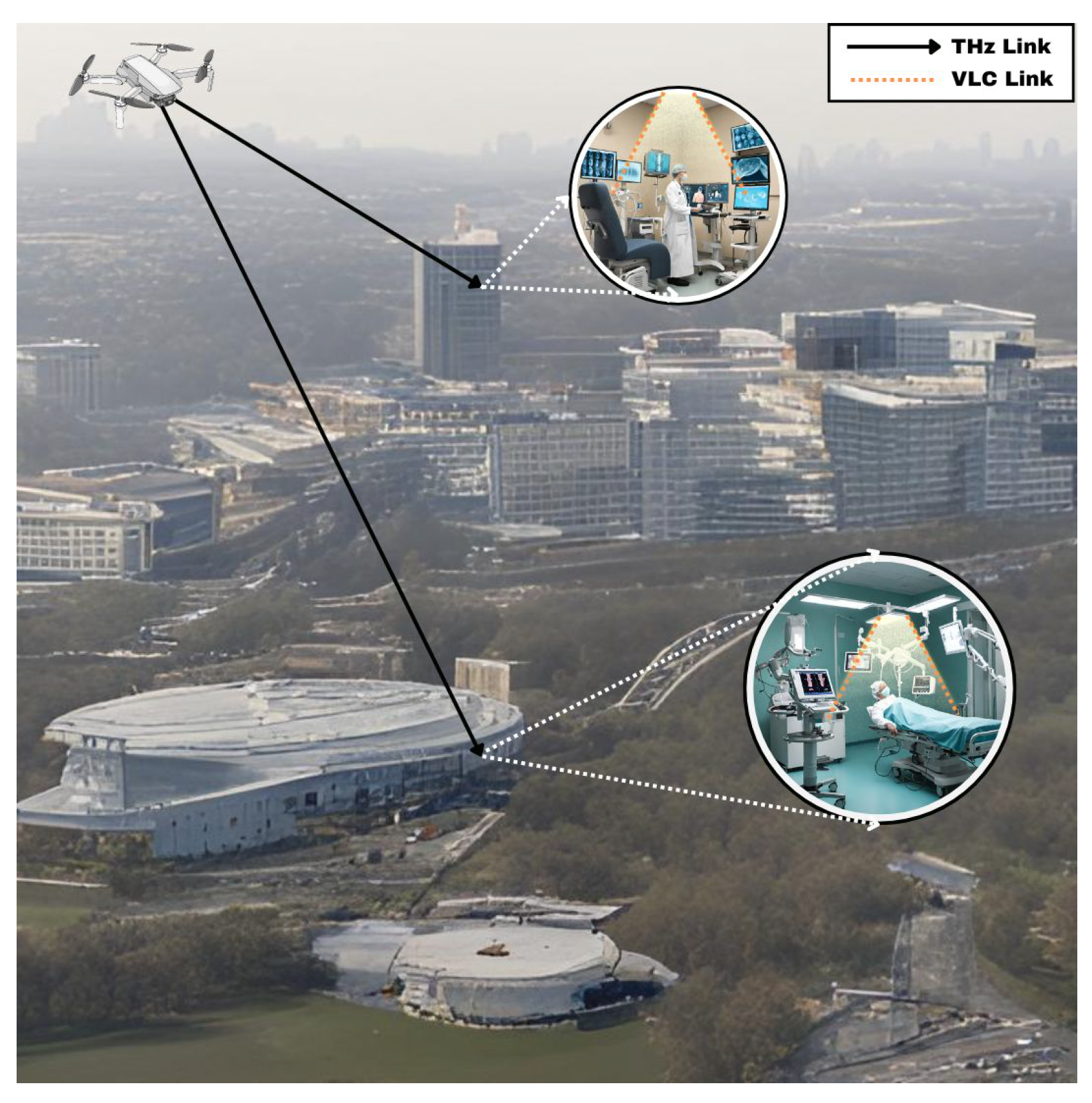
Figure 4.
This diagram illustrates the use of THz and VLC in an in underwater wireless communications application. The system employs a floating buoy to facilitate dual-hop communication between a ship and an AUV, enhancing data transfer capabilities for underwater applications. THz communication is utilized for ship to buoy communication, while laser based VLC is utilized for underwater.
Figure 4.
This diagram illustrates the use of THz and VLC in an in underwater wireless communications application. The system employs a floating buoy to facilitate dual-hop communication between a ship and an AUV, enhancing data transfer capabilities for underwater applications. THz communication is utilized for ship to buoy communication, while laser based VLC is utilized for underwater.
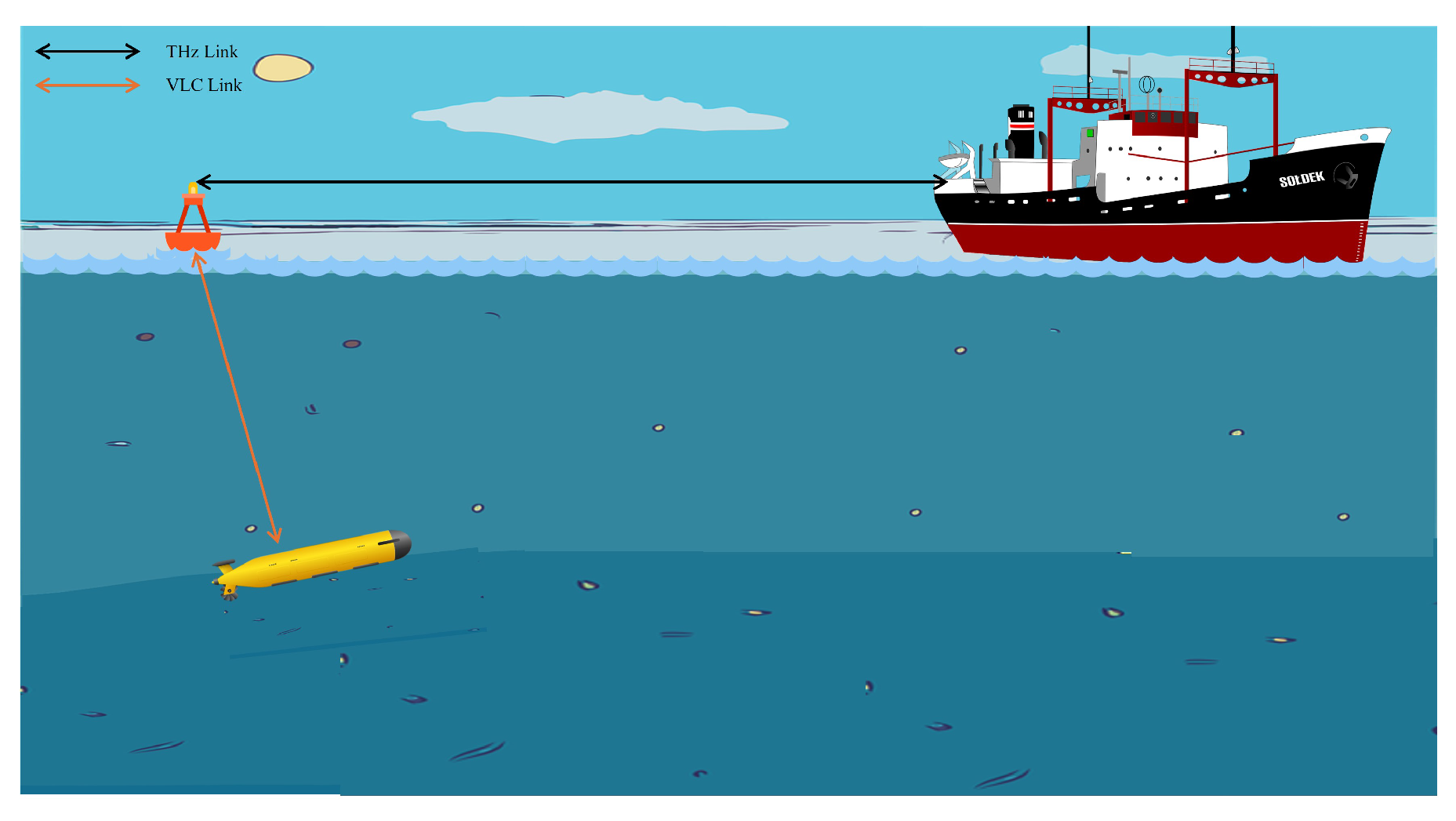
Figure 5.
This diagram illustrates the use of THz and VLC in a military application. The system employs a fixed wing UAV to facilitate dual-hop communication between a command centre and the ground troops. THz communication is utilized for outdoor communication, while indoor utilizes VLC.
Figure 5.
This diagram illustrates the use of THz and VLC in a military application. The system employs a fixed wing UAV to facilitate dual-hop communication between a command centre and the ground troops. THz communication is utilized for outdoor communication, while indoor utilizes VLC.
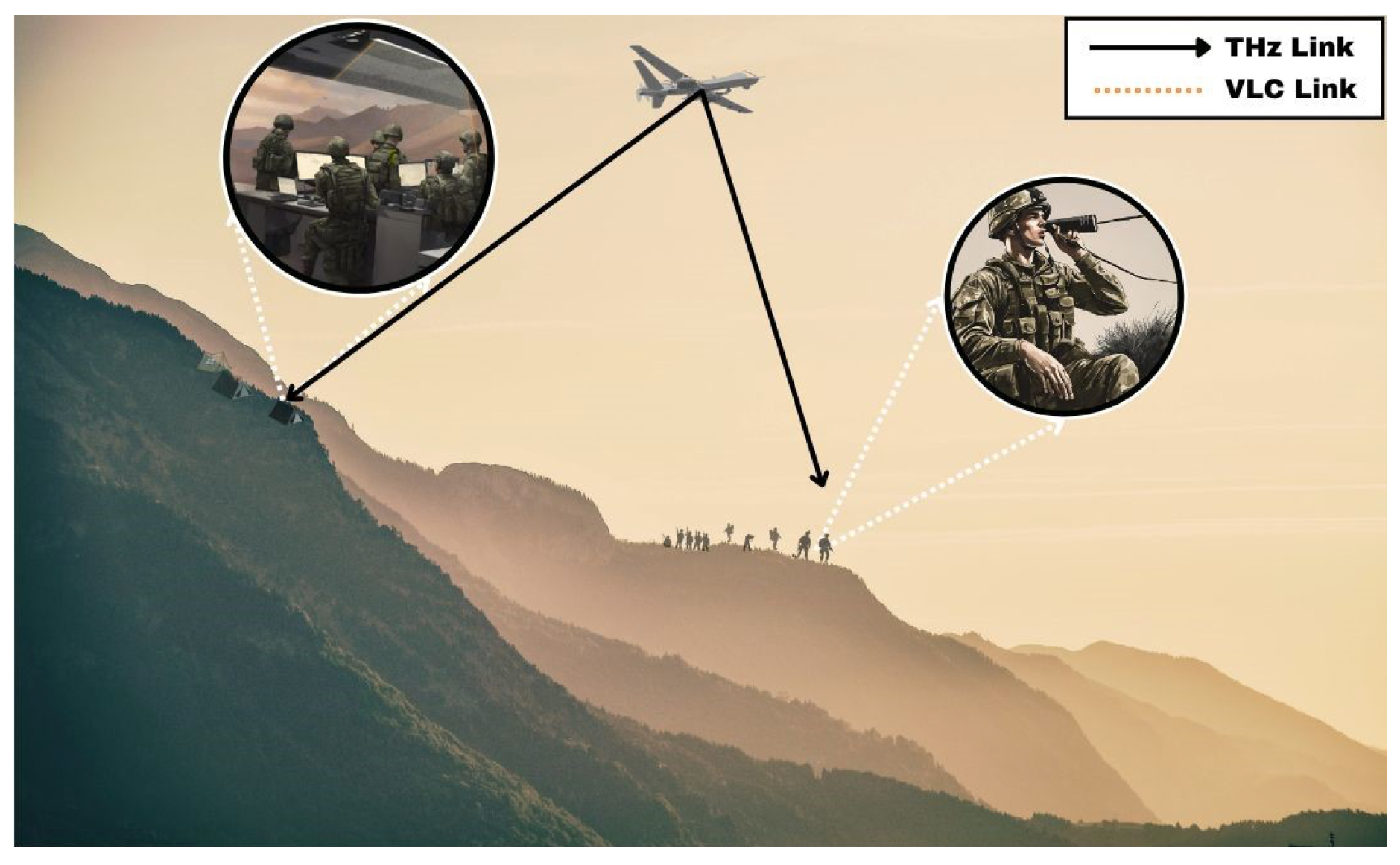
Figure 6.
This diagram illustrates the use of THz and VLC in a 4K video streaming scenario. THz communication is utilized for outdoor communication from the UAV, while indoor utilizes VLC.
Figure 6.
This diagram illustrates the use of THz and VLC in a 4K video streaming scenario. THz communication is utilized for outdoor communication from the UAV, while indoor utilizes VLC.
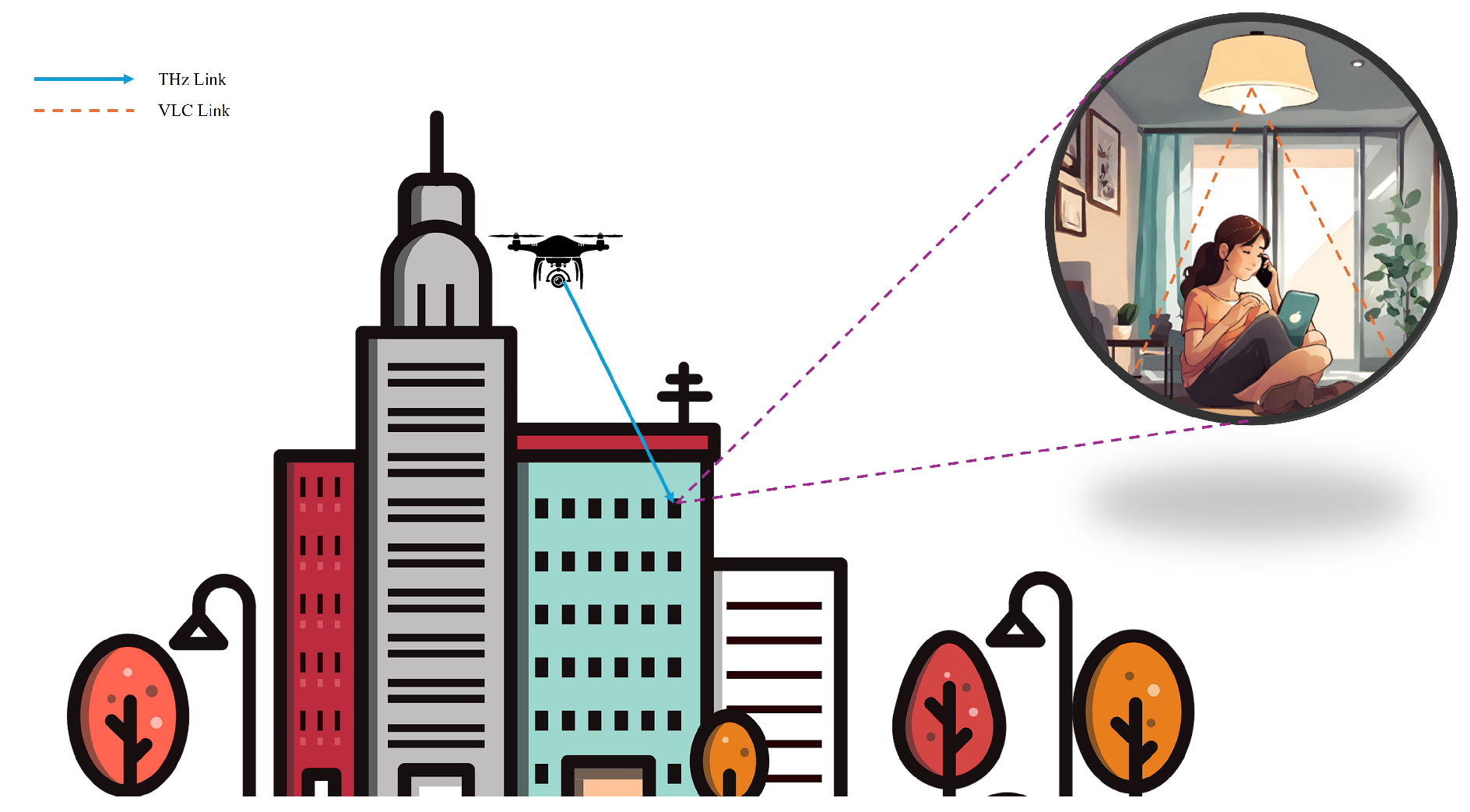
Figure 7.
System Model Overview
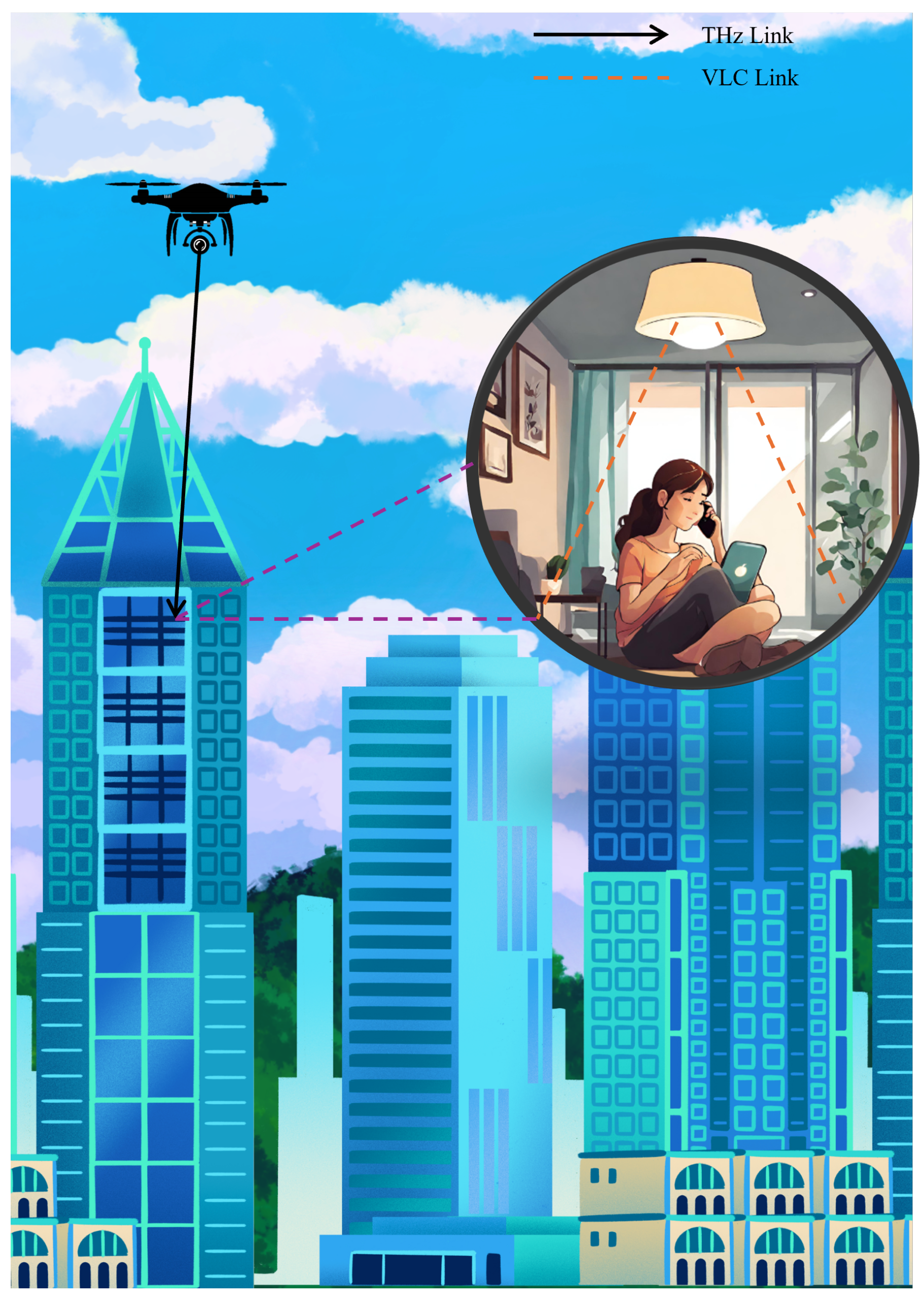
Figure 8.
Comparison of BER performance for varying pointing errors THz-VLC link
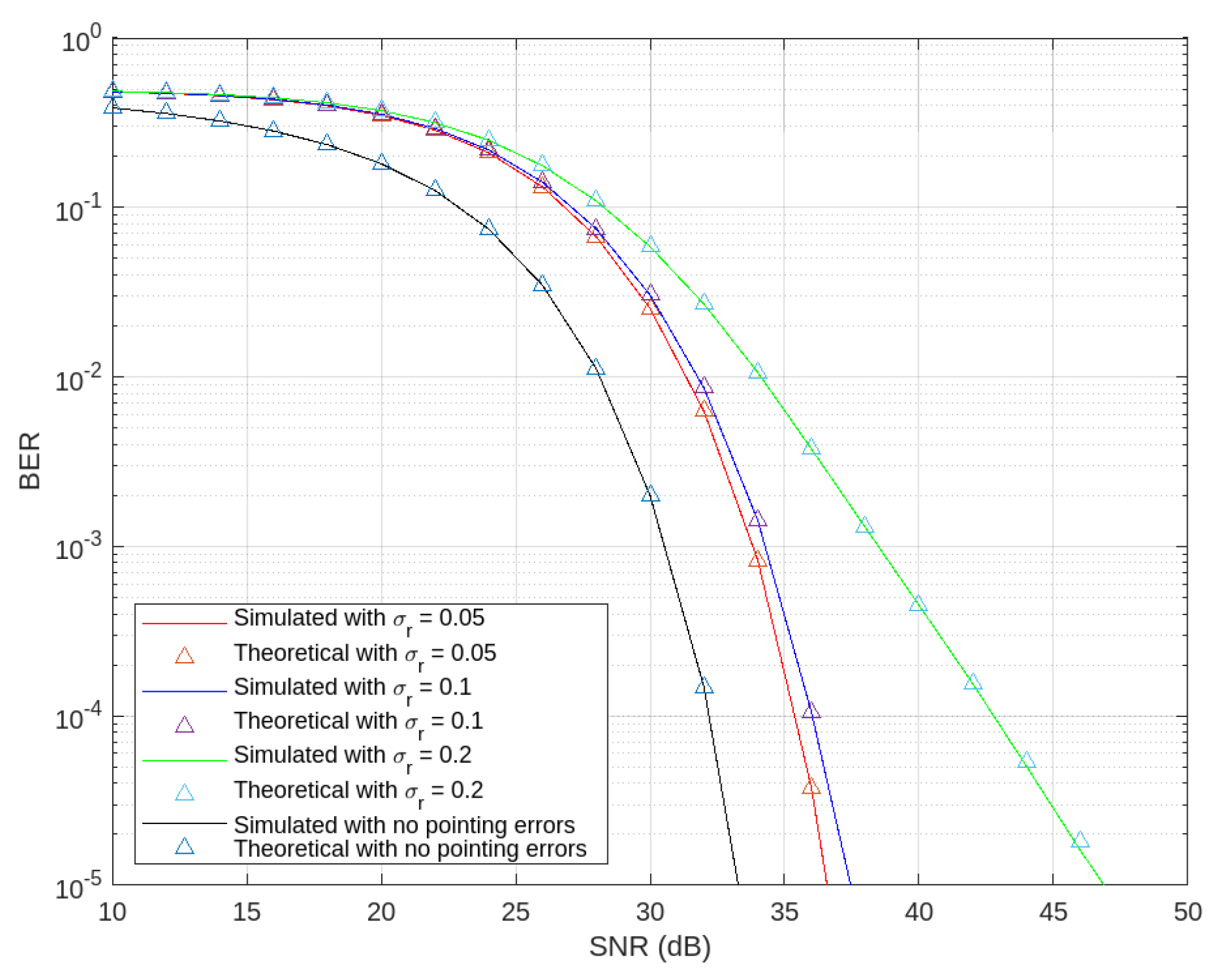
Figure 9.
Comparison of BER performance among THz-VLC, RF-VLC, and FSO-VLC.
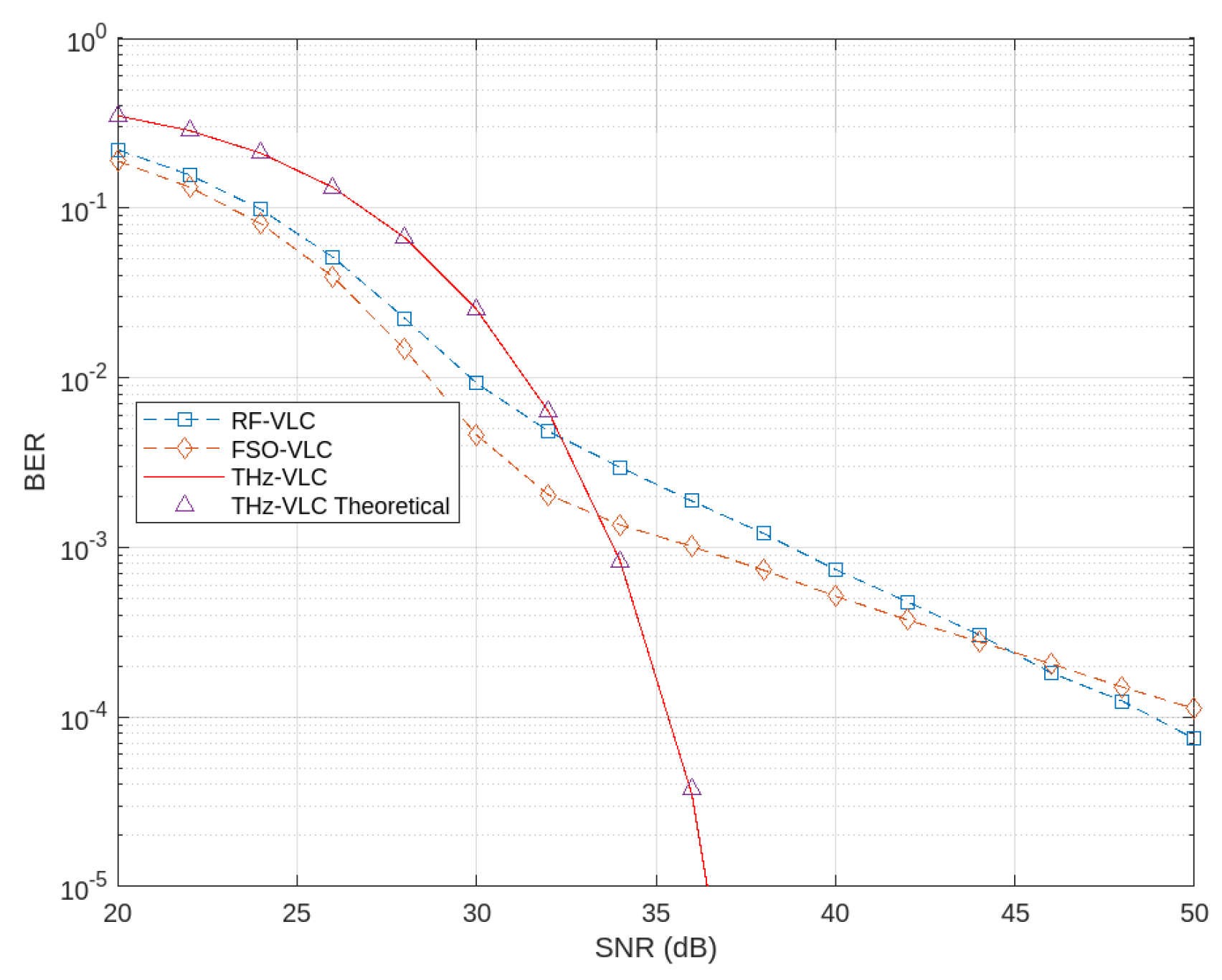
Figure 10.
Comparison of BER performance among THz-VLC, RF-VLC, and FSO-VLC with varying relay-destination link distances
Figure 10.
Comparison of BER performance among THz-VLC, RF-VLC, and FSO-VLC with varying relay-destination link distances
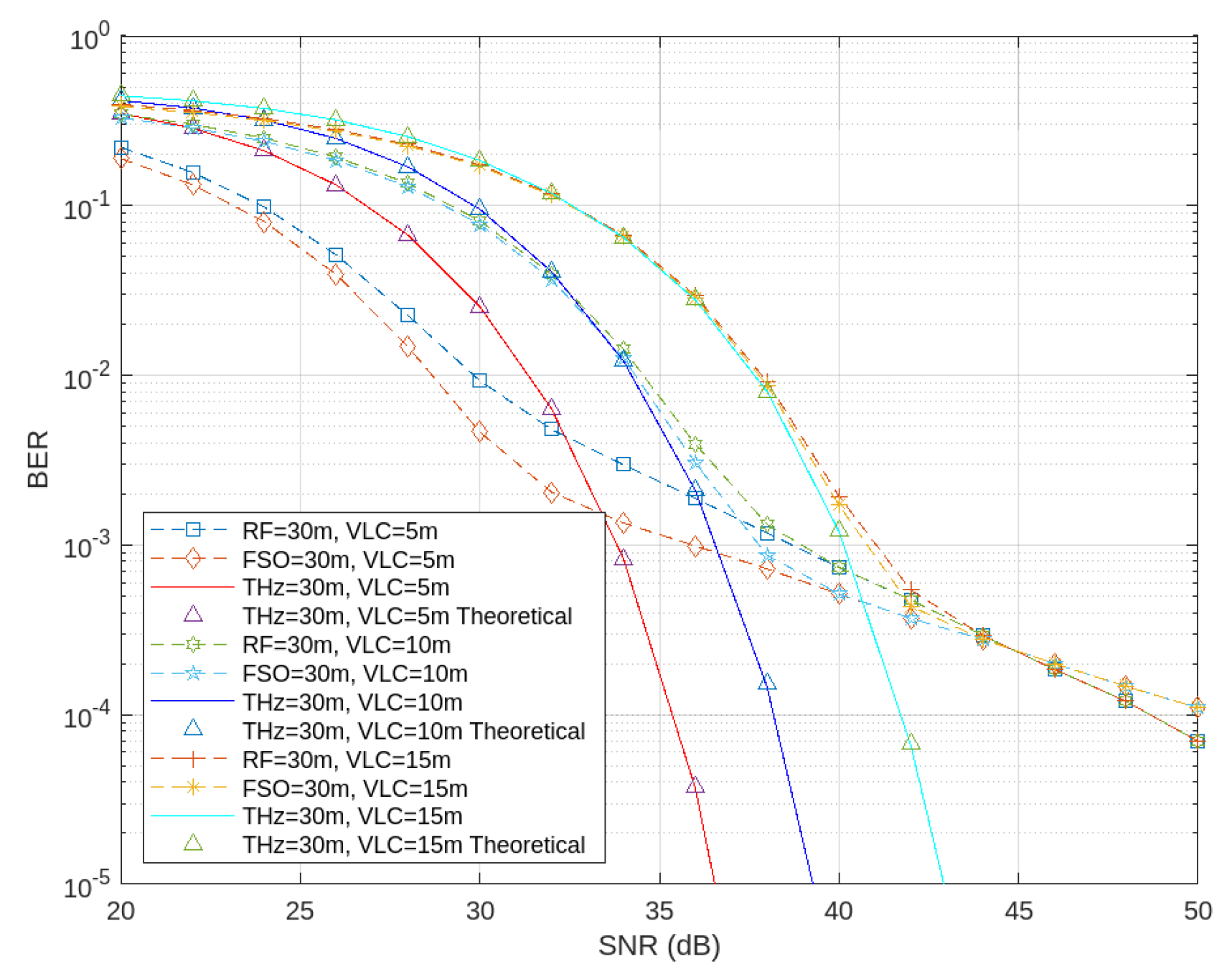
Figure 11.
The outage probability performance comparison with varying pointing errors in THz-VLC link
Figure 11.
The outage probability performance comparison with varying pointing errors in THz-VLC link
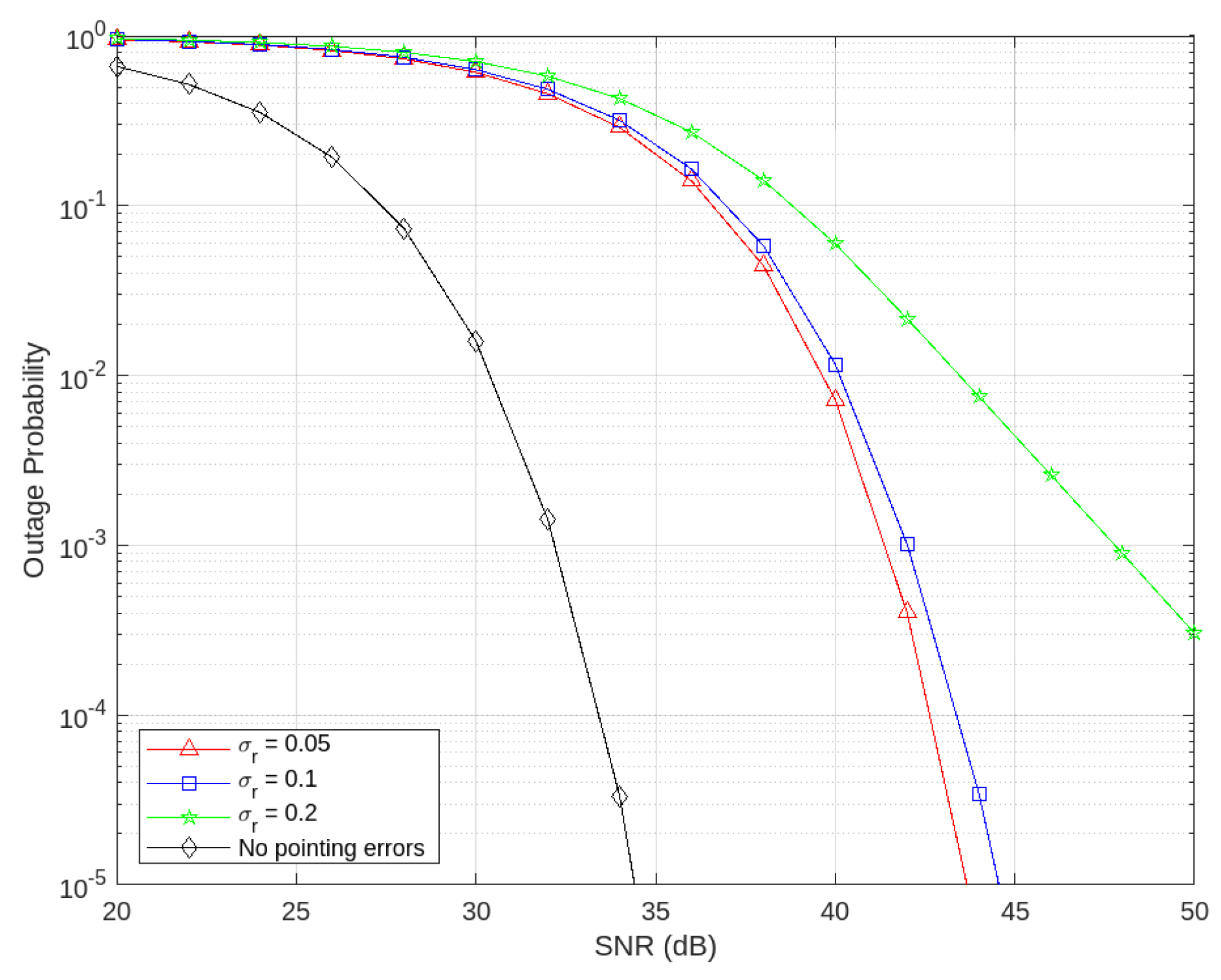
Figure 12.
The outage probability performance comparison with varying for THz-VLC, RF-VLC and FSO-VLC.
Figure 12.
The outage probability performance comparison with varying for THz-VLC, RF-VLC and FSO-VLC.
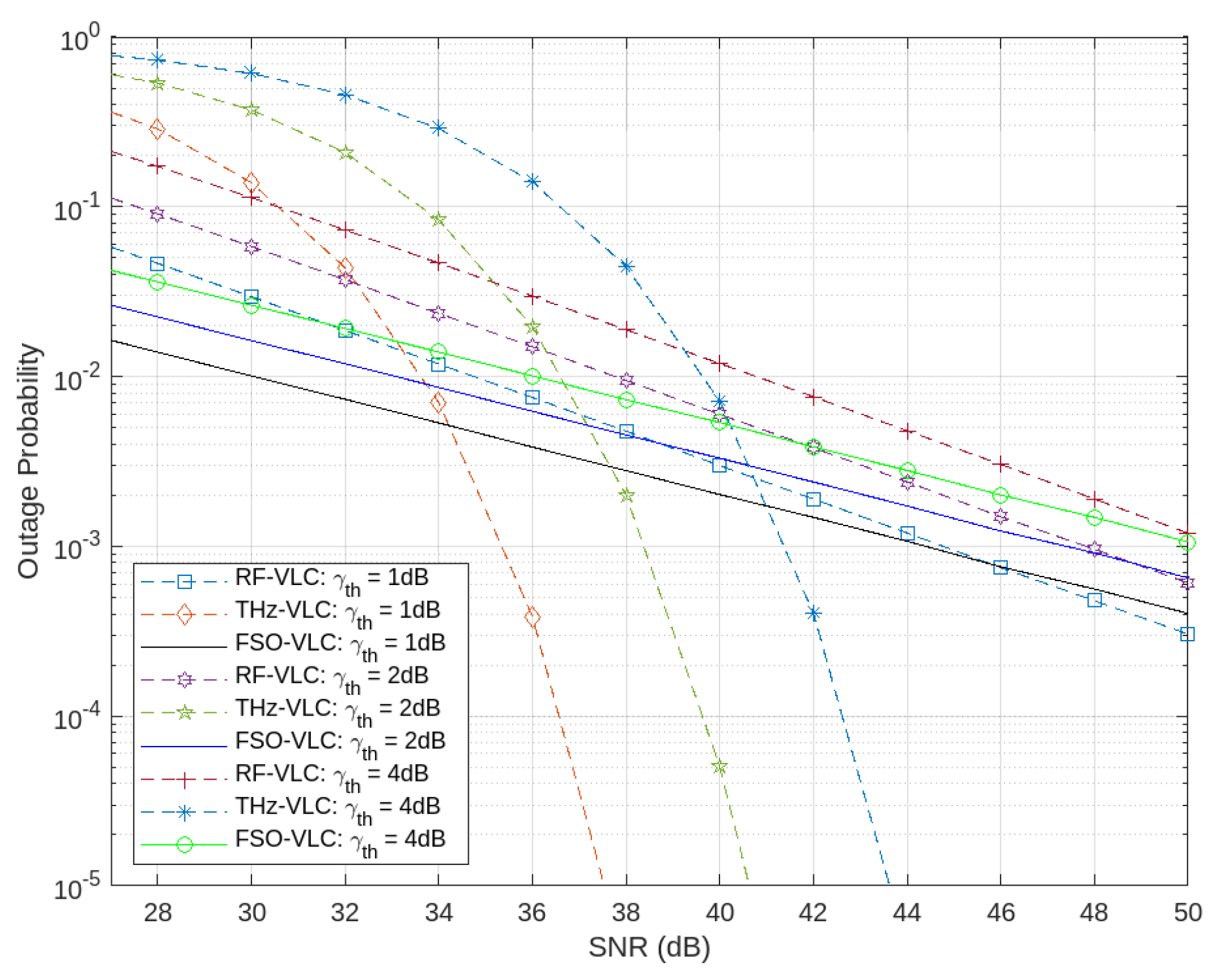
Figure 13.
Illustration of future directions in THz-VLC systems
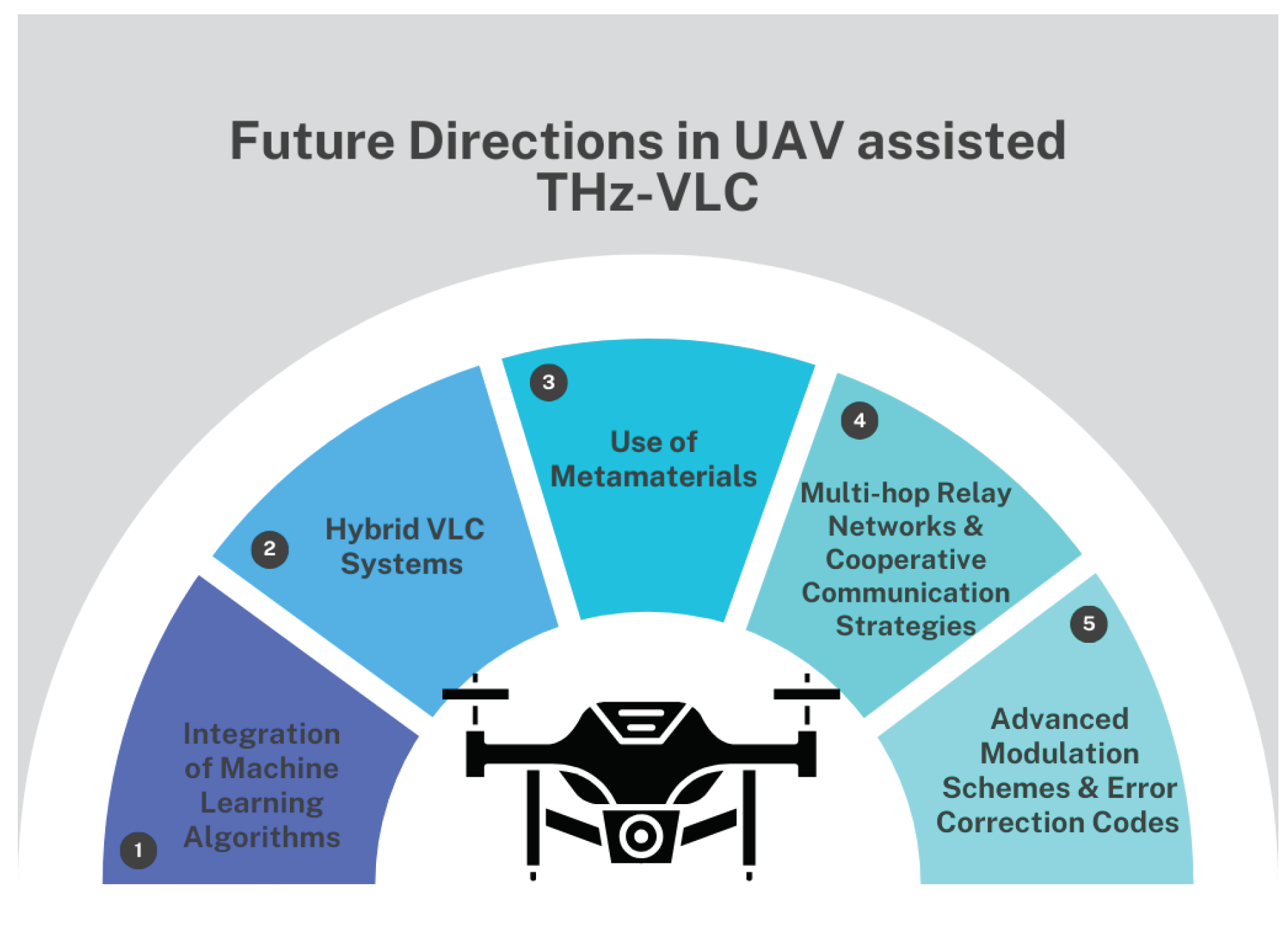

Table 1.
Simulation parameters.
| Parameters | Values |
|---|---|
| Number of bits | 1e5 |
| Distance [THz link] | 30 m |
| Frequency [THz link] | 0.3 THz |
| Radius of the reception antenna | 0.1 m |
| Transmission beam footprint radius | 0.6 m |
| Jitter variance, | 0.05 - 0.2 |
| Distance [VLC link] | 2 m |
| Photo-diode Area | 0.05 |
| Source power, | 1 dB |
| Relay power, | 1 dB |
| Refractive index of a lens | 1.5 |
| Distance [FSO link] | 30 m |
| [FSO link] | 4.1 |
| [FSO link] | 1.4 |
| Distance [RF link] | 30 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



