
Submitted:
28 May 2024
Posted:
29 May 2024
You are already at the latest version
Abstract
This work investigates the stability conditions for linear systems with time-varying delays via augmented Lyapunov-Krasovskii functional(LKF). Two types of augmented LKFs with cross terms in integral are suggested to improve the stability conditions for interval time-varying linear systems. Through this work, the compositions of the LKFs are considered to enhance the feasible region of stability criterion for linear systems. Mathematical tools such as Wirtinger-based integral inequality(WBII), zero equalities, reciprocally convex approach, and Finsler’s lemma are utilized to solve the problem of stability criteria. Two sufficient conditions are derived to guarantee the asymptotic stability of the systems using linear matrix inequality(LMI). First, asymptotic stability criteria are induced by constructing the new augmented LKFs in Theorem 1. And then simplified LKFs in Corollary 1 are proposed to show the effectiveness of Theorem 1. Second, asymmetric LKFs are shown to reduce the conservatism and the number of decision variables in Theorem 2. Finally, the advantages of the proposed criteria are verified by comparing maximum delay bounds in two examples. Two numerical examples show that the proposed Theorem 1 and 2 obtained less conservative results than existing outcomes. Also, Example 2 shows that the asymmetric LKF methods of Theorem 2 can provide larger delay bounds and fewer decision variables than Theorem 1’s in some specific systems.
Keywords:
Augmented approaches
; Linear system
; Stability analysis
; Time delay
1. Introduction
It is well-known that time delays in system operation create unexpected dynamic situations such as quality degradation, vibration, and instability [1,2]. That is why time-delays have received lots of attention in many fields, such as aircraft, biological systems, chemical processes, networked control systems, neural networks, fuzzy systems, and so on. One of the crucial concerns in studying time-delay systems is the development of stability conditions while increasing the upper bounds of time-delay compared with others. On the other hand, stability analysis of time delay systems can be classified into two broad categories: delay-independent and delay-dependent. In the general case, the delay-dependent case is known to be less conservative than the delay-independent one when the size of the time delay is small [3]. Therefore, research on delay-dependent systems has been more actively conducted.
For the past decades, lots of stability criteria based on the Lyapunov stability theorem have been suggested [4]-[33]. Here, there are two methods available for deriving enhanced stability conditions for linear systems with interval time-varying delays. One approach involves determining the LKFs to derive less conservative stability conditions for the system [4]. Another method utilizes mathematical tools to handle issues such as quadratic terms, non-LMI forms, and so on [5,6]. Indicators evaluating these methods include the maximum delay upper bound and the number of decision variables [7].
It is well recognized that finding new LKFs is also an important and significant job [8]. The conservatism of the stability results is determined by how the LKFs are constructed. A notable trend is to design them as complex integrals, including double and triple integrals and even augmented forms, within LKFs to include more information on system dynamics and delay properties. In [9] and [10], the integral term was integrated into the form in the design of LKFs, with [10] further enhancing this approach by incorporating delay terms. Moreover, [11] and [12] expanded LKFs by proposing augmented quadratic forms for single and double integral terms, resulting in more conservative results. [3,13] improved LKFs by introducing an additional integral term for interval time-varying delays. And some researchers obtained conservative results by proposing various triple integral terms[14].
When extracting stability conditions based on LKFs, the quadratic terms within the integral term derived from the derivative of the double integral were of interest. To solve the quadratic terms within the integral, numerous integral inequalities offering the lower bound of integral terms have been proposed for decades. Many researchers have suggested various skills to reduce the conservatism of the LMI and computational burdens. The Jensen integral inequality was first used by Gu [15] to improve the stability conditions of time-delay systems. The Wirtinger-based integral inequality (WBII) [16] was introduced to obtain a tighter lower bound for the quadratic form in the integral term than that provided by Jensen’s inequality [17]. Park [18] presented the Wirtinger-based double integral inequality for the quadratic double integral form in the stability of time-delay systems. Moreover, Generalized versions of the WBII were introduced using an auxiliary function in [19], while recent works in [20,21,22] have presented further generalized integral inequalities. Another mathematical technique is the reciprocally convex approach, which provides the lower bound of integral terms [23]. Since then, some improved versions have been introduced in [24,25,26]. Zhang et al.[24] proposed delay-dependent-matrix-based reciprocally convex inequality and estimation approaches for stability analysis with time-varying delays of linear systems. In addition to the methods mentioned so far, other techniques have been worked to improve the stability conditions of systems. By adding a cross term to the time derivative LKF term, [27] suggested several zero equations and ultimately yielded improved results. Generalized zero equality techniques that exploit the relationships among the integral terms have been introduced for linear systems with interval time-varying delays [28]. The work [29] applied the augmented zero equality method derived from Finsler Lemma and zero equalities to obtain improved results and proposed an approach to mitigate computational complexity. And numerous achievements in [30,31,32] adopted various functions to reduce the conservatism of stability conditions for time-delay systems. On the other hand, [33] proposed asymmetric LKF in which the involved matrix variables do not require to be all positive definite.
In this paper, stability criteria for linear systems with interval time-varying delays are studied. Two types of augmented LKFs with cross terms in integral are suggested to improve the stability conditions for interval time-varying linear systems. To solve the problem of stability criteria, WBII, zero equalities, reciprocally convex approach and Finsler’s lemma are utilized. In theorem 1, stability criteria were derived by constructing augmented LKFs, with the process employing zero equalities and WBII. In Theorem 2, asymmetric LKFs were constructed to reduce the number of decision variables. Finally, two numerical examples show that the proposed Theorem 1 and 2 obtained less conservative results compared to existing outcomes.
Notations. , , and () denote, respectively, n-vectors, matrices, and symmetric (positive) matrix. denotes an identity matrix. denotes a zero matrix. and denote and the column vector. * is used to represent symmetric terms as needed. ⊙ denotes the quadratic form of the matrix. denotes a basis for the null-space of X. means that is the matrix with respect to , i.e., .
2. Problem Statements
In this paper, consider the following linear systems with time-varying delays as follows
where represents the state vector, is the initial condition, are the system’s constant matrices. And is a time-varying delay satisfying and where and are known positive scalars and is any constant one.
The purpose of this paper is to derive stability criteria for linear systems (1) with interval time varying delays. On the other hand, the following lemmas are used to derive main results.
Lemma 1.
[5] For scalars , an vector , and a matrix , the following inequality holds
where and
Lemma 2.
[23] For a scalar , vectors , matrices , , and , the following inequality holds , with .
Lemma 3.
[34] Let , , . The following formulas are equivalent: (i) , (ii) , (iii) .
3. Main Results
This section presents the stability criteria for the system (1). At first, a stability criterion is obtained by utilizing an augmented LKF and Lemmas 1 - 3. Following this, stability criteria are improved through the an asymmetric LKF. To simplify the expression of LMIs, an augmented vector is defined as:
where
And the block entry matrices are utilized, e.g., and . Also, the following notations are defined as:
Theorem 1.
Proof of Theorem 1.
Consider the LKF candidate given by
where
where .
The time derivative of Lyapunov Krasovskii functionals
Moreover, by employing Lemma 1 (N=1), upper bounds of integral terms in (14) can be obtained as follows:
By using Lemma 2,
Based on the relationships between the elements of the augmented vector, the following equality is derived as
Also, by Lemma 1 (N=1), the Lyapunov functional is induced
Thus, is
Regarding the system (1), a stability condition can be expressed as
Considering parts i) and iii) of Lemma 3, the condition (24) is equivalent to
Remark 1.
In [3], the augmented vector for the single integral term included only , , and . However, in of Theorem 1, double integral terms were considered such as , and in and , additional single integral term, such as , were considered. And accordingly, the augmented vector was further considered as , and stability conditions were derived using the zero equality (20). In next section, it will be shown that Theorem 1 can provide larger delay bounds than those of [3].
In order to show the effectiveness of LKFs (7), let us consider LKFs as . The LKFs are simplified by removing double integral terms in LKFs of Theorem 1. An augmented vector for Corollary 1 is defined follows:
And the block entry matrices are utilized. Also, the following notations are defined as:
Corollary 1.
Proof
(Proof of Corollary 1). Consider the LKF candidate given by
where
In above results, LKFs are typically expected to be symmetric. However, the LKF in Theorem 2 is asymmetric. Then, the following theorem is introduced as the result with the asymmetric functionals. The augmented vector of Theorem 2 is presented as follows:
And the block entry matrices are utilized. Also, the following notations are defined as:
Theorem 2.
Proof of Theorem 2.
Consider the LKF candidate given by
where
Since the sum of LKF must be positive in asymmetric LKF method, it must be guaranteed that is positive if of and W of are positive.
By using Lemma 1 (N=0), can be bounded as
By adding the lower bound of to , the following can be obtained.
And then, the lower bound of (38) can be bounded as follow by using Lemma 1(N=0), since , ,
As a result, it is proven that is positive and (32) is obtained.
The time derivative of is induced as follow
Since the subsequent process is similar to Theorem 1, the proof of Theorem 2 is complete. □
Remark 2.
Asymmetric LKFs were proposed in [33], and asymmetric LKFs were also used in Theorem 2, but in [33] it was applied to part , whereas in Theorem 2 it was applied to part because there was to . In next section, Theorem 2 can provide larger delay bounds than [3,10,35] by comparing maximum delay bounds. Furthermore, Theorem 2 shows slightly larger delay bounds than Theorem 1 by Example 2, while the number of decision variables in Theorem 2 is used less than those of Theorem 1.
4. Examples
In this section, the effectiveness and superiority of the proposed stability criteria are demonstrated through two examples.
Example 1 Consider the system (1) :
Table 1 and Table 2 list the maximum delay bounds for various , as determined by Theorem 1, 2, and Corollary 1, as well as those of [3,10,35], when is 0.1 and 0.5, respectively. It is listed in Table 1 that Theorem 1 and 2 provide larger delay bounds than those of [3,10,35]. Additionally, Theorem 1 is yields slightly larger delay bounds compared to Corollary 1. Table 2 also shows the superiority of Theorem 1 and 2 when . As a result, it can be confirmed that improved results can be obtained from suggested Theorem 1 and Theorem 2. And Figure 1 shows that the state responses of the system (1) converge to zero as time goes to infinity.
Example 2 Considering the water pollution control problem based on [36], the dynamical behavior is as follows:
where and denote states, which represent the concentrations of biochemical oxygen demand (BOD) and dissolved oxygen (DO) in the reach at time t, respectively. And the definitions of parameter in (43) - (44) are shown in [36]. In the absence of disturbances and uncertainties, (43) - (44) can be described as the system (1), and the matrices of the system are as follows:
Table 3 lists the maximum delay bounds for various at , comparing the results of Theorem 1, 2, and Corollary 1, and those of [3]. And it can also be shown that Theorem 2 provides larger delay bounds than Theorem 1. Table 4 also shows the effectiveness and superiority of Theorem 2 because the number of decision variables used is smaller than those of Theorem 1. Finally, it can be seen that the state responses of the system (1) in Figure 2 converge to zero.
Remark 3.
By Example 1, Theorem 1 and Theorem 2 show the effectiveness of the proposed criteria by comparing with [3,10,35] based on maximum delay bound. By Example 2, the asymmetric LKFs method of Theorem 2 can provide larger delay bounds than Theorem 1 and reduce decision variables in some specific systems. This supports the fact that the considered LKFs in Theorem 2 is effective in enhancing the feasible region by comparing Theorem 1.
5. Conclusions
The stability problem for linear systems with interval time-varying delays was studied In this paper. The compositions of the LKFs were considered to improve the feasible region of stability criterion for linear system through this work. In Theorem 1, the asymptotic stability criteria of the systems have been derived by constructing the augmented LKFs. And then, simplified LKFs in Corollary 1 are proposed to show the effectiveness of Theorem 1. In Theorem 2, asymmetric LKFs are presented to reduce the conservatism and the number of decision variables. Two numerical examples have been given to show the effectiveness and superiority of the proposed criteria.
Author Contributions
Conceptualization, O.M. Kwon; methodology, O.M. Kwon and S.H. Lee; software, D.H. Lee, Y.J Kim and S.H. Lee; validation, D.H. Lee, Y.J. Kim and S.H. Lee; formal analysis, D.H Lee and S.H. Lee; investigation, D.H. Lee; resources, O.M. Kwon; data curation, D.H. Lee and Y.J. Kim; writing—original draft preparation, D.H. Lee and Y.J. Kim; writing—review and editing, D.H. Lee and Y.J. Kim; visualization, D.H. Lee and Y.J. Kim; supervision, S.H. Lee; project administration, O.M. Kwon; funding acquisition, O.M. Kwon All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the Basic Science Research Program through the National Research Foundation of Korea(NRF) funded by the Ministry of Education under Grant NRF-2020R1A6A1A12047945 and in part by Innovative Human Resource Development for Local Intellectualization program through the Institute of Information & Communications Technology Planning & Evaluation (IITP) grant funded by the Korea government (MSIT) (IITP-2024-2020-0-01462, 50%).
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| LKF | Lyapunov-Krasovskii functional |
| WBII | Wirtinger-based integral inequality |
| LMI | Linear matrix inequality |
| BOD | biochemical oxygen demand |
| DO | dissolved oxygen |
References
- Niculescu, S. I. Delay Effects on Stability: A Robust Control Approach. Springer Science & Business Media 2001, 269. [Google Scholar]
- Richard, J. P. Time-delay systems: an overview of some recent advances and open problems. Automatica 2003, 39, 1667–1694. [Google Scholar] [CrossRef]
- Kwon, O. M.; Park, M. J.; Park, J. H.; Lee, S. M. Enhancement on stability criteria for linear systems with interval time-varying delays. International Journal of Control Automation and Systems 2016, 14, 12–20. [Google Scholar] [CrossRef]
- Zhang, X. M.; Han, Q. L.; Seuret, A.; Gouaisbaut, F.; He, Y. Overview of recent advances in stability of linear systems with time-varying delays. IET Control Theory and Applications 2019, 13, 1–16. [Google Scholar] [CrossRef]
- Park, M. J.; Kwon, O. M.; Ryu, J. H. Advanced stability criteria for linear systems with time-varying delays. Journal of the Franklin Institute-Engineering and Applied Mathematics 2018, 355, 520–543. [Google Scholar]
- Zeng, H. B.; Lin, H. C.; He, Y.; Teo, K. L.; Wang, W. Hierarchical stability conditions for time-varying delay systems via an extended reciprocally convex quadratic inequality. Journal of the Franklin Institute-Engineering and Applied Mathematics 2020, 357, 9930–9941. [Google Scholar] [CrossRef]
- Xu, S. Y.; Lam, J. A survey of linear matrix inequality techniques in stability analysis of delay systems. International Journal of Systems Science 2008, 39, 1095–1113. [Google Scholar] [CrossRef]
- Zhang, C. K.; He, Y.; Jiang, L.; Wu, M.; Zeng, H. B. Stability analysis of systems with time-varying delay via relaxed integral inequalities. Systems & Control Letters 2016, 92, 52–61. [Google Scholar] [CrossRef]
- He, Y.; Wang, Q. G.; Lin, C.; Wu, M. Augmented Lyapunov functional and delay-dependent stability criteria for neutral systems. International Journal of Robust and Nonlinear Control 2005, 15, 923–933. [Google Scholar] [CrossRef]
- Sun, J.; Liu, G. P.; Chen, J.; Rees, D. Improved delay-range-dependent stability criteria for linear systems with time-varying delays. Automatica 2016, 92, 52–61. [Google Scholar] [CrossRef]
- Kwon, O. M.; Park, M. J.; Park, J. H.; Lee, S. M.; Cha, E. J. Improved results on stability of linear systems with time-varying delays via wirtinger-based integral inequality. Journal of the Franklin Institute-Engineering and Applied Mathematics 2014, 351, 5386–5398. [Google Scholar] [CrossRef]
- Qian, W.; Li, T.; Cong, S.; Fei, S. M. Stability analysis for interval time-varying delay systems based on time-varying bound integral method. Journal of the Franklin Institute-Engineering and Applied Mathematics 2014, 351, 4892–4903. [Google Scholar] [CrossRef]
- Lee, S. H.; Park, M. J.; Kwon, O. M.; Choi, S. G. Less conservative stability criteria for general neural networks through novel delay-dependent functional. Applied Mathematics and Computation 2022, 420, 126886. [Google Scholar] [CrossRef]
- Zhao, X.; Lin, C.; Chen, B.; Wang, Q. G. Stability analysis for linear time-delay systems using new inequality based on the second-order derivative. Journal of the Franklin Institute-Engineering and Applied Mathematics 2019, 356, 8770–8784. [Google Scholar] [CrossRef]
- Gu, K. Q. An integral inequality in the stability problem of time-delay systems. Proc. of the 39th IEEE Conference on Decision and Control, Sydney, Australia, (12-15 December 2000), 2805-2810.
- Seuret, A.; Gouaisbaut, F. Wirtinger-based integral inequality: Application to time-delay systems. Automatica 2013, 49, 2860–2866. [Google Scholar] [CrossRef]
- Gu, K. Q. A further refinement of discretized lyapunov functional method for the stability of time-delay systems. International Journal of Control 2001, 74, 967–976. [Google Scholar] [CrossRef]
- Park, M. J.; Kwon, O. M.; Park, J. H.; Lee, S. M.; Cha, E. J. Stability of time-delay systems via wirtinger-based double integral inequality. Automatica 2015, 55, 204–208. [Google Scholar] [CrossRef]
- Park, P. G.; Lee, W. I.; Lee, S. Y. Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems. Journal of the Franklin Institute-Engineering and Applied Mathematics 2015, 352, 1378–1396. [Google Scholar] [CrossRef]
- Seuret, A.; Gouaisbaut, F. Stability of linear systems with time-varying delays using bessel-legendre inequalities. IEEE Transactions on Automatic Control 2018, 63, 225–232. [Google Scholar] [CrossRef]
- Park, M. J.; Kwon, O. M.; Ryu, J. H. Generalized integral inequality: Application to time-delay systems. Applied Mathematics Letters 2018, 77, 6–12. [Google Scholar] [CrossRef]
- Zeng, H. B.; Liu, X. G.; Wang, W. A generalized free-matrix-based integral inequality for stability analysis of time-varying delay systems. Applied Mathematics and Computation 2019, 354, 1–8. [Google Scholar] [CrossRef]
- Park, P. G.; Ko, J. W.; Jeong, C. Reciprocally convex approach to stability of systems with time-varying delays. Automatica 2011, 47, 235–238. [Google Scholar] [CrossRef]
- Zhang, X. M.; Han, Q. L.; Seuret, A.; Gouaisbaut, F. An improved reciprocally convex inequality and an augmented lyapunov-krasovskii functional for stability of linear systems with time-varying delay. Automatica 2017, 84, 221–226. [Google Scholar] [CrossRef]
- Seuret, A.; Liu, K.; Gouaisbaut, F. Generalized reciprocally convex combination lemmas and its application to time-delay systems. Automatica 2017, 84, 221–226. [Google Scholar] [CrossRef]
- Zhang, R. M.; Zeng, D. Q.; Park, J. H.; Zhong, S. M.; Liu, Y. J.; Zhou, X. New approaches to stability analysis for time-varying delay systems. Journal of the Franklin Institute-Engineering and Applied Mathematics 2019, 356, 4174–4189. [Google Scholar]
- Kim, S. H.; Park, P.; Jeong, C. Robust h stabilisation of networked control systems with packet analyser. IET Control Theory and Applications 2019, 356, 4174–4189. [Google Scholar]
- Lee, S. Y.; Lee, W. I.; Park, P. Improved stability criteria for linear systems with interval time-varying delays: Generalized zero equalities approach. Applied Mathematics and Computation 2017, 292, 336–348. [Google Scholar] [CrossRef]
- Kwon, O. M.; Lee, S. H.; Park, M. J.; Lee, S. M. Augmented zero equality approach to stability for linear systems with time-varying delay. Applied Mathematics and Computation 2020, 381, 125329. [Google Scholar] [CrossRef]
- Li, Z. C.; Yan, H. C.; Zhang, H.; Zhan, X. S.; Huang, C. Z. Improved inequality-based functions approach for stability analysis of time delay system. Automatica 2019, 108, 108416. [Google Scholar] [CrossRef]
- Li, Z. C.; Yan, H. C.; Zhang, H.; Peng, Y.; Park, J. H.; He, Y. Stability analysis of linear systems with time-varying delay via intermediate polynomial-based functions. Automatica 2020, 113, 108756. [Google Scholar] [CrossRef]
- Zhang, C. K.; Long, F.; He, Y.; Yao, W.; Jiang, L.; Wu, M. A relaxed quadratic function negative-determination lemma and its application to time-delay systems. Automatica 2020, 113, 108764. [Google Scholar] [CrossRef]
- Sheng, Z. L.; Lin, C.; Chen, B.; Wang, Q. G. Asymmetric lyapunov-krasovskii functional method on stability of time-delay systems. International Journal of Robust and Nonlinear Control 2021, 31, 2847–2854. [Google Scholar] [CrossRef]
- De Oliveira, M. C.; Skelton, R. E. Stability tests for constrained linear systems. Perspectives in Robust Control 2007, 1–10. [Google Scholar]
- Liu, Y.; Hu, L. S.; Shi, P. A novel approach on stabilization for linear systems with time-varying input delay. Applied Mathematics and Computation 2012, 218, 5937–5947. [Google Scholar] [CrossRef]
- Lee, C. S.; Leitmann, G. Continuous feedback guaranteeing uniform ultimate boundedness for uncertain linear delay systems - an application to river pollution-control. Computers & Mathematics with Applications 1988, 16, 929–938. [Google Scholar] [CrossRef]
Figure 1.
The state responses of the system (1) (Example 1).
Figure 1.
The state responses of the system (1) (Example 1).
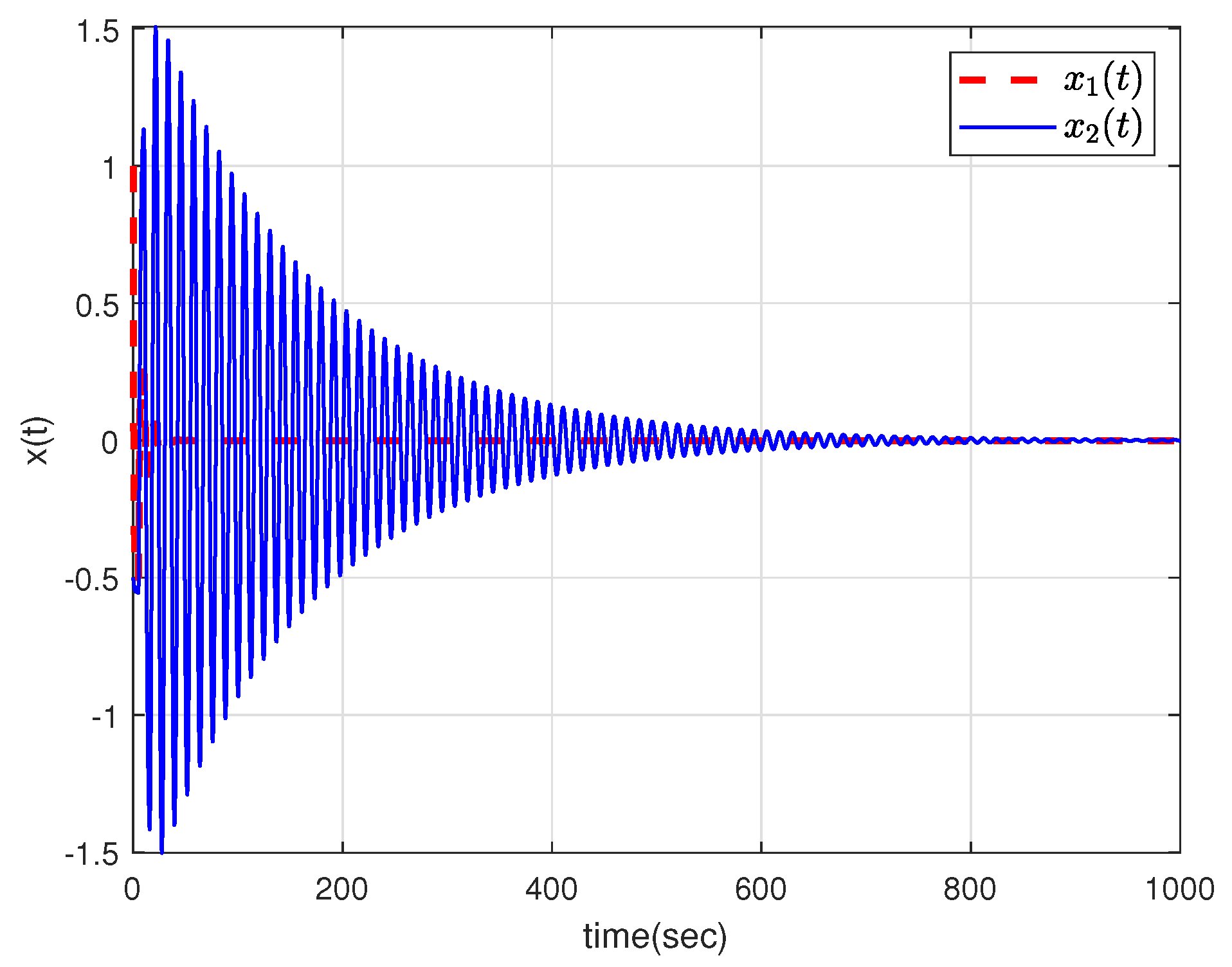
Figure 2.
The state responses of the system (1) (Example 2).
Figure 2.
The state responses of the system (1) (Example 2).
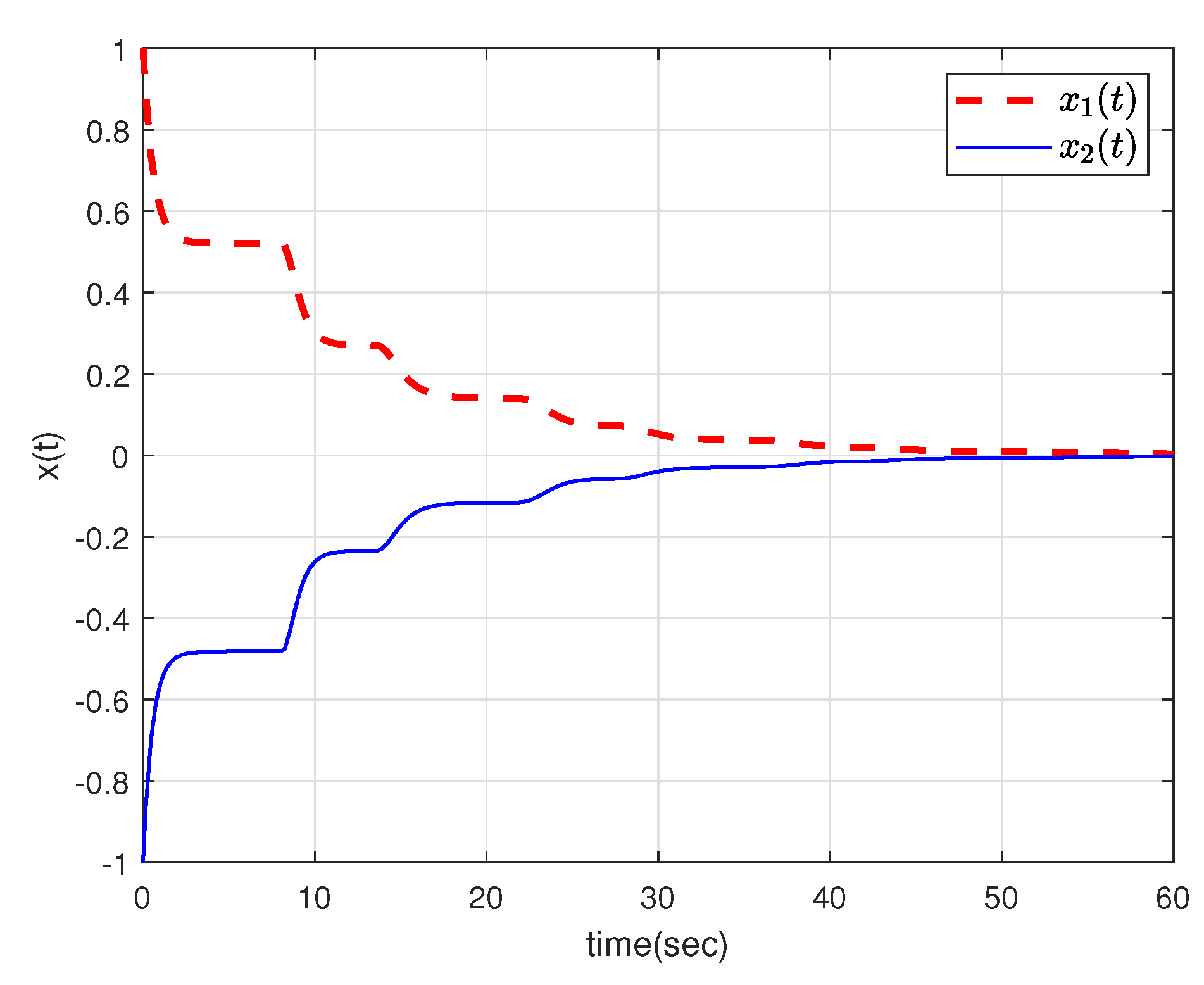

Table 1.
Maximum delay bound for various with (Example 1).
| 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|
| [10] | 4.1935 | 4.4932 | 4.3979 | 4.1978 | 5.0275 |
| [35] | 4.4045 | 4.5729 | 4.5406 | 4.2367 | 5.0440 |
| [3] | 4.7561 | 4.7746 | 4.7931 | 4.7567 | 5.1372 |
| Corollary 1 | 4.7577 | 4.7715 | 4.7634 | 4.7273 | 5.1373 |
| Theorem 1 | 4.7952 | 4.8132 | 4.8110 | 4.7850 | 5.1511 |
| Theorem 2 | 4.7951 | 4.8132 | 4.8109 | 4.7849 | 5.1500 |
Table 2.
Maximum delay bound for various with (Example 1).
| 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|
| [10] | 2.3058 | 2.5663 | 3.3408 | 4.1690 | 5.0275 |
| [35] | 2.3513 | 2.6987 | 3.4186 | 4.2097 | 5.0440 |
| [3] | 2.4904 | 2.7994 | 3.4977 | 4.2939 | 5.1372 |
| Corollary 1 | 2.4752 | 2.8111 | 3.4997 | 4.2946 | 5.1373 |
| Theorem 1 | 2.5739 | 2.9247 | 3.5561 | 4.3134 | 5.1412 |
| Theorem 2 | 2.5739 | 2.9247 | 3.5593 | 4.3133 | 5.1406 |
Table 3.
Maximum delay bound for various with (Example 2).
| 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|
| [3] | 5.1893 | 6.0899 | 7.0461 | 8.0461 | 9.0461 |
| Corollary 1 | 3.8906 | 4.8426 | 5.8413 | 6.8413 | 7.8413 |
| Theorem 1 | 5.4731 | 6.2440 | 7.1456 | 8.0755 | 9.0564 |
| Theorem 2 | 5.6896 | 6.3537 | 7.1932 | 8.0908 | 9.0578 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



