
Submitted:
31 May 2024
Posted:
04 June 2024
You are already at the latest version
Abstract
Hybrid electric vehicles (HEVs) are perceived as a first step towards the future of sustainable transport. Of course, battery electric vehicles (EVs) are currently ideal for what is wanted to stand for transport in the future. The lack of infrastructure for these vehicles makes many potential users choose hybrid vehicles in these conditions. This paper analyzes the influence of the engine and electric motor of hybrid vehicles on their performances. Three engines with slightly different power and close characteristics were considered for configured models. Also, two electric motors with very different power but having a very close maximum continuous torque have been used in models. One is an induction motor, and the other is a permanent magnet synchronous motor. ADVISOR software has been used for vehicles configuration and simulation. Series and parallel hybrid vehicles have been considered. The main dynamic performances and the fuel consumption in two driving cycles were compared for the configured models. Three conventional models with the same engines used in HEVs have also been simulated for reference. The results highlight that in the case of HEVs, the choice of combination engine/electric motor is crucial in obtaining the best report between dynamic performances and low fuel consumption, and implicitly a low negative impact on the environment.
Keywords:
ADVISOR software
; electric motor/engine
; hybrid vehicle
; performance
1. Introduction
The reasons why the world has returned to electric vehicles are well known. We will mention only a few that we consider the most important. The first one is reducing the greenhouse gas emissions. HEVs and EVs could reduce these emissions by up to 80%, eliminating most urban air pollution [1]. The second one is that HEVs and EVs are more efficient than conventional vehicles with internal combustion engines (ICEVs), the difference in fuel consumption can reach up to 60% in low to medium average speed [2]. If good management is applied, it is even possible to improve the efficiency of electrical networks using these vehicles. The last reason mentioned here is the continuous increase in the price of fossil fuels so at this moment, their cost is one of the highest that has ever existed. However, the issue raised by the increase in the number of plug-in hybrid electric vehicles (PHEVs) and EVs is complex. One of the most important is the lack of power supply infrastructure and the relatively long time required to recharge the battery. Another significant drawback is the high cost of energy sources in EVs and PHEVs [3]. High upfront costs and the relatively limited battery life are other disadvantages that add to the previous ones. These shortcomings persist at this point, regardless of how long the autonomy of the HEVs or EVs is. It should be mentioned that for HEVs not only the battery capacity is important, but also, the energy management system, and the powertrain architecture; for this reason, the subject is always relevant, and new solutions are sought [4,5,6,7,8,9,10].
To avoid some of these shortcomings, people still prefer vehicles that are more independent but also meet high standards of pollution norms. These are the hybrid vehicles, especially the plug-in and range-extended ones. Specialists estimate that HEV’s market will increase by 20% in the next five years [4]. Also, it is estimated that the price of HEVs will become comparable with that of conventional vehicles and even cheaper after 2025, while the well-designed HEVs, can perform better than the conventional ones [11,12]. As a principle, they combine the advantages of electric and classic ones, but their control is complex.
The main objectives of the paper are represented by the determination and comparison of the performance of hybrid vehicles for which different engine/electric motor combinations are made. Using the ADVISOR software, series, and parallel hybrid vehicles are configured and simulated, and the performance is estimated for two driving cycles. Then we wanted to compare their performances with those of some conventional vehicles. So, in the same driving cycles, three conventional vehicles were also simulated, the chosen engines being the ones considered for the HEVs.
When we talk about the performance of the vehicle, we refer to the following parameters: the time required for the vehicle to reach certain speeds, the maximum acceleration and speed, the possibility of maintaining a certain speed for some time in a maximum incline ramp (gradeability), the equivalent fuel consumption and the overall efficiency of the vehicle.
Without carrying out an exhaustive study, six configurations of series, six parallel hybrid vehicles and three conventional are considered, so that based on the results some important conclusions can be drawn.
The paper is organized as follows. In Section 2 the powertrain architectures of HEVs are shown and those used in the paper are discussed. Also, subsection two relates to the vehicle model used in the simulation with the main relationships. The third section refers to the configuration of the considered models, using the ADVISOR software, as well as to some basic characteristics of their components. In the last section simulation results are discussed and the most important conclusions are depicted.
2. Materials and Methods
2.1. Architecture of Hybrid Vehicles
From the point of view of the propulsion system, hybrid vehicles can be of the following types [13,14]: series, parallel, series-parallel, and complex, Figure 1.
This paper will study only the first two types, combining three engines with different powers (41, 50, and 63 kW) and two electrical motors with quite different powers (49 and 124 kW), but with a comparable maximum torque.
One can see from the earlier figure that in the case of series hybrid vehicles, only the electric motor propels the vehicle, while in the other types, both the electric motor and the engine can propel the vehicle. This is why series hybrid vehicles as the full electric ones, usually, have only a single-speed gearbox. Very often there are exceptions to this rule, researchers studying and recommending, for reasons of reducing consumption, multi-speeds gearboxes, or with variable gear ratio [15,16,17]. The parallel HEVs have a multispeed gearbox as the engine (MCI) vehicles.
The overall efficiency of the series HEVs is high if the engine efficiency is high, and this happens when the engine works close to the rated power [18]. So, it is important to mention that series architecture is used especially for passenger transport vehicles, like busses, while the other architectures are used for small and medium vehicles. And yet, thanks to the increase in the efficiency of energy storage systems, the use of ultracapacitors [19], and power converters for electric motors, the series architecture also seems to become a competitor for other types of vehicles.
Each of the configurations (series or parallel) has advantages and disadvantages that will be briefly presented below [20].
In case of series HEVs some of the main advantages consist in optimal operation of the engine for all vehicle operating regimes, simpler powertrain control, lower specific fuel consumption, and of course less gas emissions compared to engine vehicles.
As disadvantages will be mentioned more energy losses because all the mechanical energy of the engine is transformed into electrical one (by generator), and after that again into mechanical (by motor) before being used to propel the vehicle. Also, higher mass (due to the generator) than parallel HEVs, and usually they have higher fuel consumption than those mentioned before.
Among the main advantages of parallel HEVs is the fact that the total power of the vehicle is the sum of the engine power and electrical motor power, the mass is lower than that of series and conventional vehicles at the same power, usually the fuel consumption is lower than of series HEVs, the losses being lower, part of the engine’s energy being transmitted directly to the propulsion group. There is no specific generator, the electrical motor being, after case, also the generator. The faults of the electric motor do not stop the operation of the vehicle as a classic one.
The downsides are the following: complex powertrain control, higher complexity implementation of distributed propulsion than in the case of series HEVs, and mechanical part more complex.
All HEVs allow electrical brake, the mechanical vehicle energy being transformed into electrical and transferred to the energy storage system (batteries and ultracapacitors)!
Considering the same power components for the two types of HEVs, the literature finds that in the case of series HEVs, we can have a maximum efficiency (from the propulsion motor/engine to the wheels) of 25%, and for parallel ones, this maximum is around 45% [21]. However, there are specific situations when the series architecture offers results comparable to the parallel one or even better [22].
2.2. The Considered Model of the Vehicle
To estimate the performances, ADVISOR (ADvanced VehIcle SimulatOR) software, created by the U.S. Department of National Renewable Energy Laboratory’s (NREL), Center for Transportation Technologies and Systems has been used [23].
Based on this model, the motion equation is,
were noted: m—vehicle inertial mass, which can be approximated at 5% higher than real mass [25]; a—acceleration; Ft—tractive force; Fw—wind force; Fr—rolling resistance force; and g—9.81 [m/s2] is the gravitational acceleration.
The wind force is proportional with air density, ρ, frontal surface A and relative wind-car velocity, v; the proportionality coefficient is the drag coefficient, Cd. For the chosen small car vehicle type, this coefficient is 0.335, and the front area is 2 m2. The air density is set to 1.2 kg/m3.
The rolling resistance force depends on vehicle mass, incline road angle and rolling resistance coefficient, Cr, which at its turn is a function of the tires and road surface. In all cases this coefficient is 0.009, and the road incline was set to zero.
The tractive force is dependent by the motor/engine torque—Tm, total transmission ratio—, and effective wheel radius, r.
This force can be at most equal to the maximum frictional force between the tires of the driving wheels and the running surface, which is maximum before slip begins.
One must consider that because of the elasticity of the tires there is always a slip (s), but it is not a slip between the tires and the running surface in the contact area (skating). This slip is a difference between the translational speed of the center of the tire and the product ΩR, where R is the free-rolling radius of the tire that is greater than the effective radius, r. Thus, slip is [26],
Depending on the slip, the tractive force is maximum when the slip is between 15-20%.
Other important parameter, specific to HEVs and EVs, which must be correctly modeled and on which the vehicle model’s performance depends at a given moment, is the battery state of charge, SOC. This can be determined according to the initial state of charge, SOC0, the coulombic efficiency of the battery, ηc, the battery current expressed in A (the “-” sign is taken if the direction in the conductor is towards the plus terminal, i.e., the battery is charging) and the battery capacity, Q0, expressed in Ah.
2.3. Configuration with ADVISOR
Twelve HEV models were configured using ADVISOR, which runs under MATLAB. Six of them are series hybrid types (Figure 3a) and the other six are parallel hybrids (Figure 3b). Then, to be able to compare the performances with those of conventional vehicles (CVs), three such models were configured (Figure 4).
In the HEV model’s architecture have been used the engine and electrical motor as follows:
- Engine 41 kW and induction motor 124 kW;
- Engine 50 kW (Honda Insight) and induction motor 124 kW;
- Engine 63 kW and induction motor 124 kW;
- Engine 41 kW and synchronous PM motor 49 kW;
- Engine 50 kW (Honda Insight) and synchronous PM motor 49 kW;
- Engine 63 kW and synchronous PM motor 49 kW.
The series models have been noted: HS1—having a mass of 1373 kg, HS2—1374 kg, HS3—1448 kg, HS4—1342 kg, HS5—1343 and HS6—1417. The parallel models are: HP1—1350 kg, HP2—1351 kg, HP3—1425 kg, HP4—1319 kg, HP5—1320 kg and HP6—1394 kg.
The conventional vehicles have been named as: CV1—41 kW engine and 984 kg, CV2—50 kW engine and 985 kg, and CV3—63 kW engine and 1059 kg. For all models (HEV and CV) the total mass includes a cargo mass of 136 kg.
For the series models a generator of 75 kW maximum power, 87 kg and the peak efficiency 0.95, has been considered. The generator delivers a maximum current of 480 A, and the minimum voltage is 120 V.
A single-speed gearbox, 50 kg, has been chosen for these models and a five-speed gearbox, 114 kg for the parallel ones. Considering the above, the difference in mass between series and parallel HEVs is 23 kg, the easiest being the parallel ones.
The gear ratios for the five-speed gearbox are predefined at: 13.45, 7.57, 5.01, 3.77, and 2.83.
For series hybrid vehicles, a single-speed gearbox is set, the gear ratio is not predefined, and its value is decided in terms of the motor’s maximum speed and wheel radius, so a maximum speed of 145 km/h is to be reached, considering a 10% slip.
The battery system is ESS_PB25, with 25 units Hawker Genesis 12V26Ah10EP. VRLA battery, rated voltage 308V, for all models. The maximum capacity at C/5 is 25 Ah. Initial SOC, 0.6. Range of variation: 0.4-0.8.
For all series, parallel and conventional models, a constant power required for the accessories of 700 W was considered.
We use for conventional vehicles (CVs) the same three engines: 41 kW, 50 kW and 63 kW, the same five speed gearbox, and the same vehicle body (small car) as in the case of the HEVs.
The considered engines have 1-L volumetric capacity in the case of 41- and 50- kW engines and 1.9 L the 63 kW, non-enriched engine. Speed-torque and efficiency curves for these engines are shown in Figure 5. The peak efficiency for the three engines is 0.34 (40 kW), 0.4 (50 kW, Honda Insight) and 0.34 (63 kW).
The induction motor has 124 kW, 91 kg, and a peak efficiency of 0.92. The synchronous one with PM has a power of 49 kW, 60 kg, and a maximum efficiency of 0.96. For these motors the operation curves are shown in Figure 6.
For each model, two driving cycles have been imposed. The first, UDDS (Urban Dynamometer Driving Schedule) is specific to urban driving and sets the speed-time relationship for 1369 s, 11.99 km. The United States Environmental Protection Agency approve it to test the fuel economy of light-duty vehicles and is also known as U.S. FTP-72 (Federal Test Procedure) cycle.
The second is NEDC (New European Driving Cycle). This is a European driving cycle, designed to assess the emission levels of engines and fuel economy in passenger cars. It is also referred to as MVEG cycle (Motor Vehicle Emissions Group), has 1184 s and 10.93 km.
This test is defined in R101 of the UNECE (United Nations Economic Commission for Europe) for the measurement of fuel consumption and/or the measurement of electric energy consumption and electric range in hybrid and fully electric M1 and N1 vehicles.
The two cycles are shown in Figure 7.
For the acceleration and gradeability test, the options shown in Figure 8 have been set.
3. Results and Conclusion
Initial SOC of the battery was set to 0.6, and the range of variation during rolling in the cycle was set between 0.4–0.8. Because the vehicle can run only with the battery energy in a single cycle (no starting the generator is needed), ten cycles have been imposed for all simulations, so the obtained results about equivalent fuel consumption and overall efficiency, have an average value. The other performances are not influenced by the imposed cycle, they depend only on the powertrain components.
As stated, six types of series HEVs were configured, and six parallel HEVs through the combination of the three engines with the two electric motors.
Some essential conclusions one can draw based on the data in Table 1 and 2. Series hybrid vehicles have lower performance than parallel ones. Using the same engine and electrical motor to configure a series or parallel hybrid, considering different drive cycles, usually the fuel equivalent consumption is higher in the case of a series hybrid. Only in case of the HS4 and HP4, the fuel consumption is lower for series HEV. Also, for HS1 and HP1, in UDDS cycle, the fuel consumption is the same. We can say that the overall efficiency is better in this case for HS1 versus HP1, but the fuel consumption is the same because of the greater mass of the series model. All dynamic performances, such as the times needed to reach different speeds, as well as the maximum speed that the vehicle can reach, are lower in the case of series hybrid vehicles. Finally, it is emphasized that the gradeability is greater in the parallel hybrid type, which is, also, a big advantage.
In the case of series hybrid vehicles, the performance depends directly on the electric motor. A more powerful motor will make the vehicle have better dynamic performance and the ability to run in a more incline ramp at a certain speed. For the same electrical motor and generator, in the case of series hybrid vehicles, the performance and gradeability depends also on the engine, but more count the combination engine-motor. Sometime, a powerful engine will offer better performance and not necessarily higher equivalent fuel consumption (see HS1 versus HS2). In fact, in this case, the better efficiency of the 50-kW engine is highlighted. More important is how the motor and engine are chosen! In this sense, comparing the HS2 and HS3 models, with approximately the same performances, we can have much lower fuel consumption. In both considered cycles! This happens also for HS4 and HS5. Fore all series HEVs the better engine (considering the performances/consumption ratio) is the 50 kW engine.
Analyzing only the series HEVs, two of the considered models seem to be the best solutions, depending on what the designer wants. Dynamic performance or low fuel consumption? If dynamic performance is the first, HS2 offers this (closer to the best) at a lower fuel consumption. In this case, the 50 kW engine and 124 kW induction motor which is more powerful, are combined. If low fuel consumption comes first, HS5 is the best solution, with a 50 kW engine and a 49 kW, PM synchronous motor. All series HEVs have a lower fuel consumption in the UDDS cycle, the exception being HS2 which has a little bit higher consumption in this cycle.
In the case of parallel hybrid vehicles, things are a little different. By keeping the same electric motor but choosing a more powerful engine, all dynamic characteristics of the car are better (HP1-3 group and HP4-6 group). What must be highlighted, however, is that keeping the same engine and using a more powerful electric motor does not imply superior vehicle performance (HP1-3 group versus HP4-6)! The better dynamic performances of the HP4-6 group compared to the HP1-3 group can be explained by the difference in mass (31 kg) between the two groups, given that the maximum continuous torque of the two electric motors is close (274 and 271 Nm respectively).
HP6 model followed by HP5 assures the best dynamic performance. While the HP6 has a big fuel consumption, the HP5 has the lowest consumption. Again, the combination of the 50 kW engine with the PM synchronous motor offers the best solution regarding fuel consumption but also a good solution regarding dynamic performance. This is given by the fact that the electric motor is one with PM with higher efficiency than the induction motor, the weight of the model is near to the smallest, and the engine has the best efficiency. All parallel HEVs have a lower fuel consumption in the NEDC cycle (only HP3 has the same). This is in reverse of the series HEVs. The parallel models have better dynamic performance and a lower fuel consumption. An exception is for HP4 and HS4 regarding the fuel consumption.
A strong point of the study regarding the HEVs, is that it points out the fact that although the HP4-6 group has a lower installed power compared with the HP1-3 group, the dynamic performances are better, all this at a lower consumption. The correlation between the electric motor and the engine is an essential thing in the case of HEVs.
Next, we wanted to compare these results with the case of CVs. Table 3 shows the results for these models.
The CV3 model assures the best dynamic performance in the case of CVs. This is better than the series HEVs (only HS3 has a greater gradeability) and weaker than the parallel ones. The fuel consumption is near to that of HS1, but smaller. So, if the dynamic performance is considered, this model is better than any of the series HEVs. The series group HS1-3 has closer dynamic performance, and only HS2 has a lower fuel consumption. If only fuel consumption is considered, the CV2 model is the best. It has the lowest consumption of all studied models, in the considered driving cycles. Also, the overall efficiency is the best and comparable with that of the HP5 model. However, if we consider the cost with which the dynamic performances are obtained (fuel consumption reported to the performance), then the best model is the HP5. The CV2 model has dynamic performances very near to the group HS4-6. But the fuel consumption is much lower than that of the models by this group. Therefore, it seems that in the case of small vehicles, the series architecture is not favorable. The price of HEVs is higher than that of CVs, and the negative effect on the environment in the production process is also higher. Of course, having a higher fuel consumption, means in the end, a more pronounced negative effect on the environment.
Comparing HP5 with CV2, the following can be highlighted: an increase in consumption of 18% in the UDDS driving cycle and 13% respectively in the NEDC cycle; a reduced time to reach 100 km/h to 56.2%; a reduced time to reach 100 km/h from 65 km/h, to 54.5%; a reduced time to reach 137 km/h to 50.4%; an increase in maximum acceleration with 61%; an increase in gradability at 80.5 km/h, with 65%. Overall efficiency is the same in the UDS cycle, and 98% in the NEDC cycle. Thus, it should be emphasized that in the case of small cars, the parallel architecture offers the best dynamic performances. This architecture assures also a very good ratio between dynamic performances and fuel consumption.
One can see from Table 2, that the HP5 and HP3 models have very similar dynamic performances. The major difference is fuel consumption, the HP5 model being the best. The HP6 model offers the best dynamic performances but with a high fuel consumption. The increase in fuel consumption is much greater than the improvement in dynamic performances. Finally, considering all models, the HP5 offers the best ratio performance/fuel consumption.
Author Contributions
Conceptualization, O.C., I.R.S and L.N.; methodology, O..C.; validation, O.C., I.R.S. and L.N.; writing—original draft preparation, O.C.; writing—review and editing, O.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are fully available in the body of the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Gee J. C., B.; Ariel G., S.; Lino M. A., II; Aileen A., A.; Camilo A., P. Assessment of the On-Road Performance of Hybrid Electric Vehicles (HEVs) and Electric Vehicles (EVs) in Urban Road Conditions in the Philippines. World Electr. Veh. J. 2023, 14(12), 333. [Google Scholar] [CrossRef]
- Charadsuksawat, A.; Laoonual, Y.; Chollacoop, N. Comparative Study of Hybrid Electric Vehicle and Conventional Vehicle Under New European Driving Cycle and Bangkok Driving Cycle. IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Bangkok, Thailand, 2018, pp. 1-6. [CrossRef]
- Verma, S.; Mishra, S.; Gaur, A.; Chowdhury, S.; Mohapatra, S.; Dwivedi, G.; Verma, P. A comprehensive review on energy storage in hybrid electric vehicle. J. Traffic Transp. Eng. Engl. Ed. 2021, 8, 621–637. [Google Scholar] [CrossRef]
- Alessia, M.; Pier, G. A.; Giovanni, B.; Daniela, A. M. Energy Management in Hybrid Electric Vehicles: A Q-Learning Solution for Enhanced Drivability and Energy Efficiency. Energies 2024, 17(1), 62. [Google Scholar] [CrossRef]
- Rizzo, G.; Naghinajad, S.; Tiano, F.A.; Marino, M. A Survey on Through-the-Road Hybrid Electric Vehicles. Electronics 2020, 9, 879. [Google Scholar] [CrossRef]
- Huang, B.; Hu, M.; Zeng, L.; Fu, G.; Jia, Q. Design Method for Hybrid Electric Vehicle Powertrain Configuration with a Single Motor. Sustainability 2022, 14, 8225. [Google Scholar] [CrossRef]
- Halima, N. B.; Chaieb, M.; Hadj, N. B.; Abdelmoula, R.; Neji, R. Study of a parallel hybrid electric vehicle performance by means of rules-based control strategies. 17th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 2020, pp. 703-708. [CrossRef]
- Wang, H.; Yang, W.; Chen, Y.; Wang, Y. Overview of hybrid electric vehicle trend. Proc. AIP Conf. Proc. 2018, 1995, 040160. [Google Scholar] [CrossRef]
- Jia, Q.; Zhang, H.; Zhang, Y.; Yang, J.; Wu, J. Parameter Matching and Performance Analysis of a Master-Slave Electro-Hydraulic Hybrid Electric Vehicle. Processes 2022, 10, 1664. [Google Scholar] [CrossRef]
- Shekhar, Y; Ahmad, A. U. A Performance Comparison Study of Hybrid Electric Vehicle Between Type-1 And Interval Type-2.0 FLC. 2023 International Conference on Power, Instrumentation, Energy and Control (PIECON), Aligarh, India, 2023, pp. 1-6. [CrossRef]
- Tran, M.-K.; Akinsanya, M.; Panchal, S.; Fraser, R.; Fowler, M. Design of a Hybrid Electric Vehicle Powertrain for Performance Optimization Considering Various Powertrain Components and Configurations. Vehicles 2021, 3, 20–32. [Google Scholar] [CrossRef]
- Wipke, K. B.; Cuddy, M. R. Using an advanced vehicle simulator (ADVISOR) to guide hybrid vehicle propulsion system development. 1996, Engineering, Environmental Science. https://digital.library.unt.edu/ark:/67531/metadc691808/.
- Emadi, A. and Petrunic J. G. Automotive industry and electrification. In A. Emadi, Advanced electric drive vehicles (Chapter 1, pp. 2-15), CRC Press, 2015.
- Chan, C. C. The State of the art of electric, hybrid, and fuel cell vehicles, in Proceedings of the IEEE, vol. 95, no. 4; pp. 704–718.
- Chiver, O.; Burnete, N.; Sugar, I.R.; Neamt, L.; Pop, E. Study on gear ratio of battery electric vehicles. Ingineria automobilului, issue 59, page11-16.
- Ratiu S., A.; Catalinoiu, R.; Miklos, I.Z. Self-adaptive mechanical reducer with variable gear ratio. Ingineria automobilului, issue 59, page17-19.
- Kwon, K.; Lee J., H.; Lim, S. K. Optimization of multi-speed transmission for electric vehicles based on electrical and mechanical efficiency analysis. Applied Energy, vol. 2023. [Google Scholar] [CrossRef]
- Benevieri, A.; Carbone, L.; Cosso, S.; Kumar, K.; Marchesoni, M.; Passalacqua, M.; Vaccaro, L. Series Architecture on Hybrid Electric Vehicles: A Review. Energies 2021, 14, 7672. [Google Scholar] [CrossRef]
- Morales-Morales, J.; Rivera-Cruz, M.A.; Cruz-Alcantar, P.; Bautista, S. H.; Cervantes-Camacho, I.; Reyes, H. V. A. Performance Analysis of a Hybrid Electric Vehicle with Multiple Converter Configuration. Appl. Sci. 2020, 10, 1074. [Google Scholar] [CrossRef]
- Jimenez, D.; Valencia, E.; Herrera, A.; Cando, E.; Pozo, M. Evaluation of Series and Parallel Hybrid Propulsion Systems for UAVs Implementing Distributed Propulsion Architectures. Aerospace 2022, 9, 63. [Google Scholar] [CrossRef]
- Li, X. and Williamson, S. S. Comparative Investigation of Series and Parallel Hybrid Electric Vehicle (HEV) Efficiencies Based on Comprehensive Parametric Analysis. IEEE Vehicle Power and Propulsion Conference, Arlington, TX, USA, 2007, pp. 499-505. [CrossRef]
- Canbolat, G.; Yasar, H. Performance Comparison for Series and Parallel Modes of a Hybrid Electric Vehicle. Sakarya University Journal of Science, 23(1), 43-50, 2019. [CrossRef]
- ADVISOR, NREL’s ADvanced VehIcle SimulatOR, https://sourceforge.net/projects/adv-vehicle-sim.
- Long, W. and Bilgin B. Fundamentals of conventional vehicles and powertrains. In A. Emadi (Ed.), Advanced electric drive vehicles (Chapter 2, pp. 15-25), CRC Press, 2015.
- Atamnia, K.; Lebaroud, A.; Makhlouf, M. Traction motor selection based on the performance analysis of pure electric vehicle under different driving scenarios. Carpathian Journal of Electrical Engineering, vol. 14, no. 1, pp. 57-72, 2020.
- Ehsani, M.; Gao, Y.; Gay, S.E. & Emadi A. Modern electric, hybrid electric, and fuel cell vehicles: Fundamentals, theory, and design, CRC Press, 2005.
Figure 1.
Powertrains for HEVs.
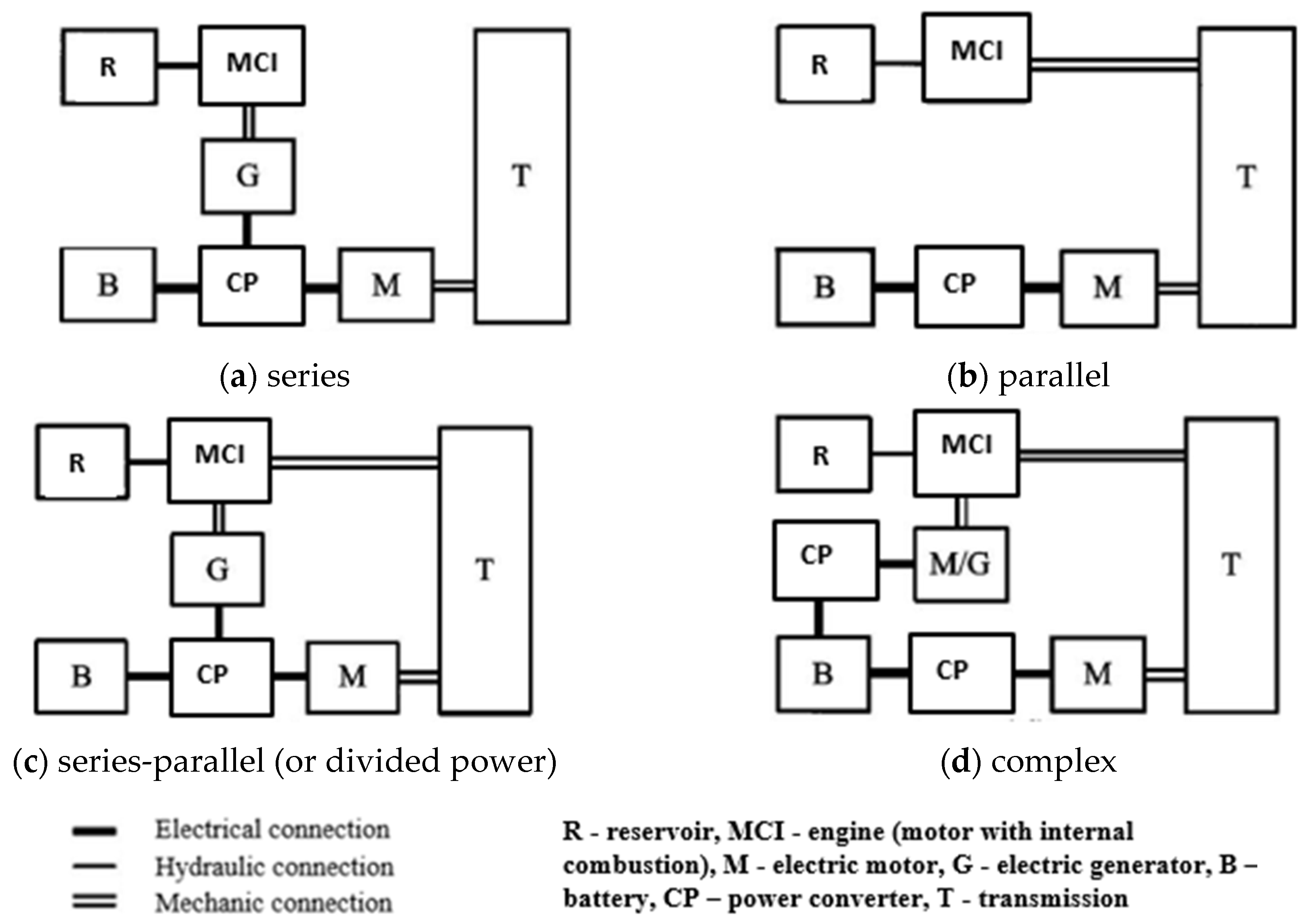
Figure 2.
Longitudinal vehicle model.
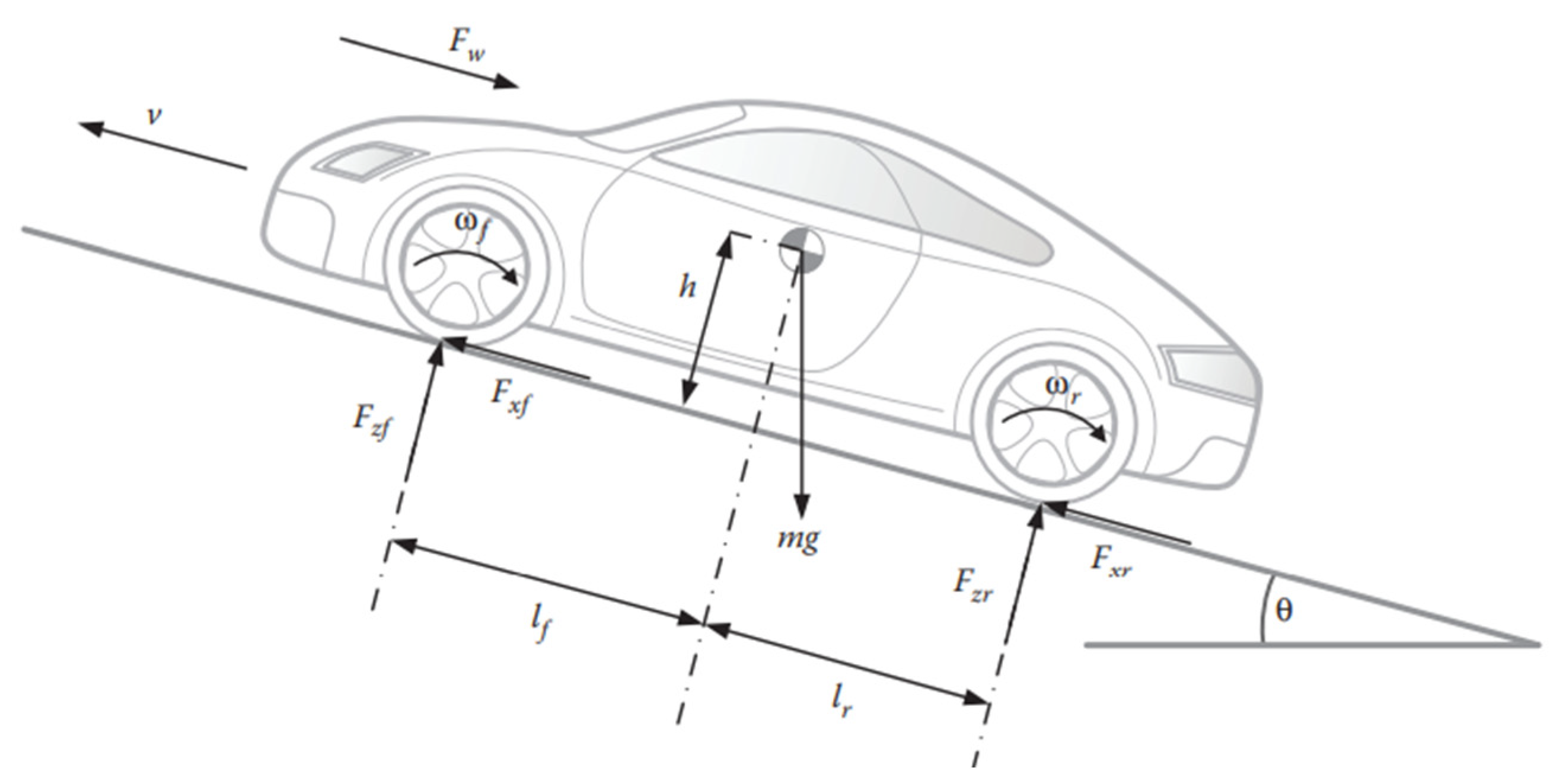
Figure 3.
HEVs configuration.
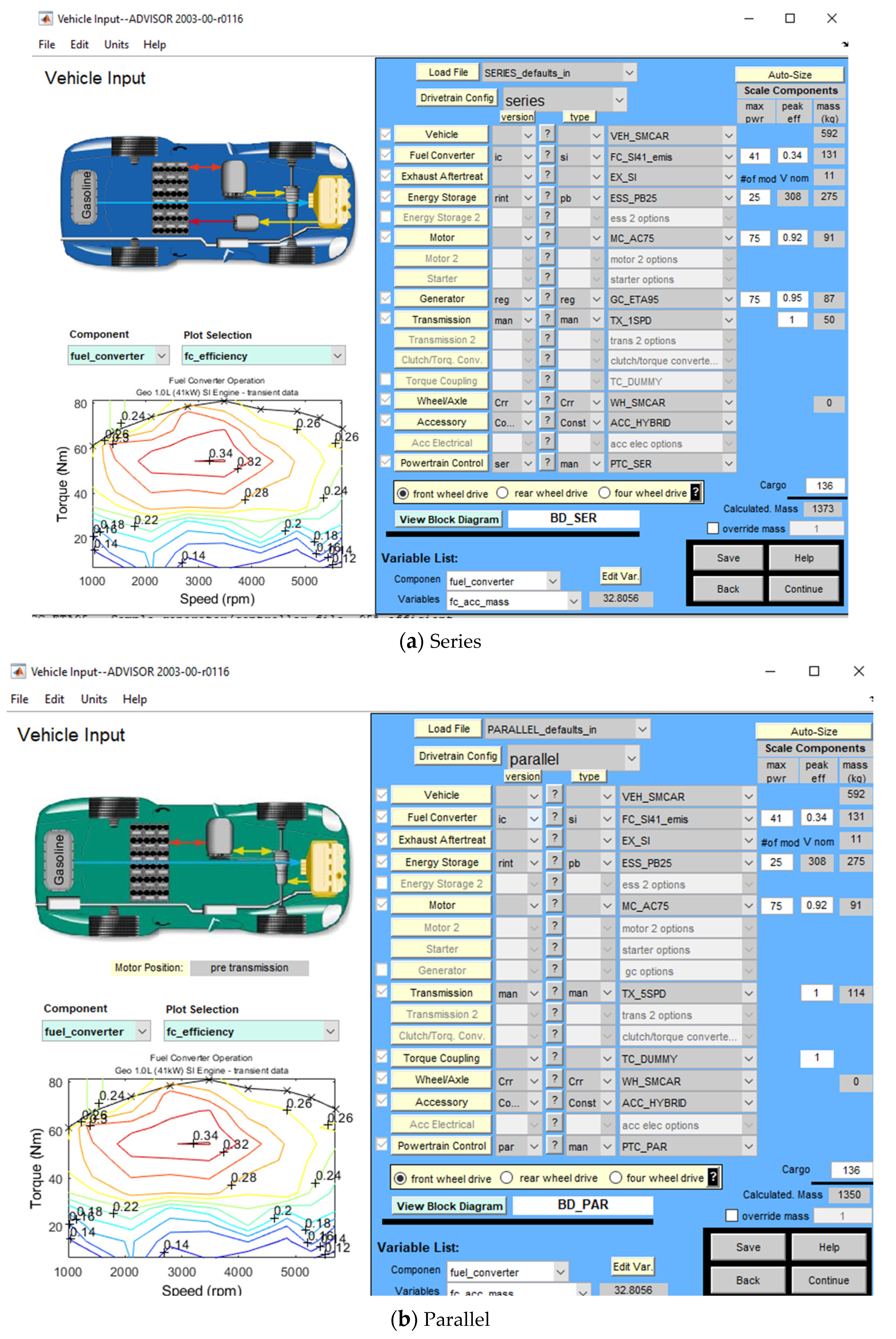
Figure 4.
CV configuration.
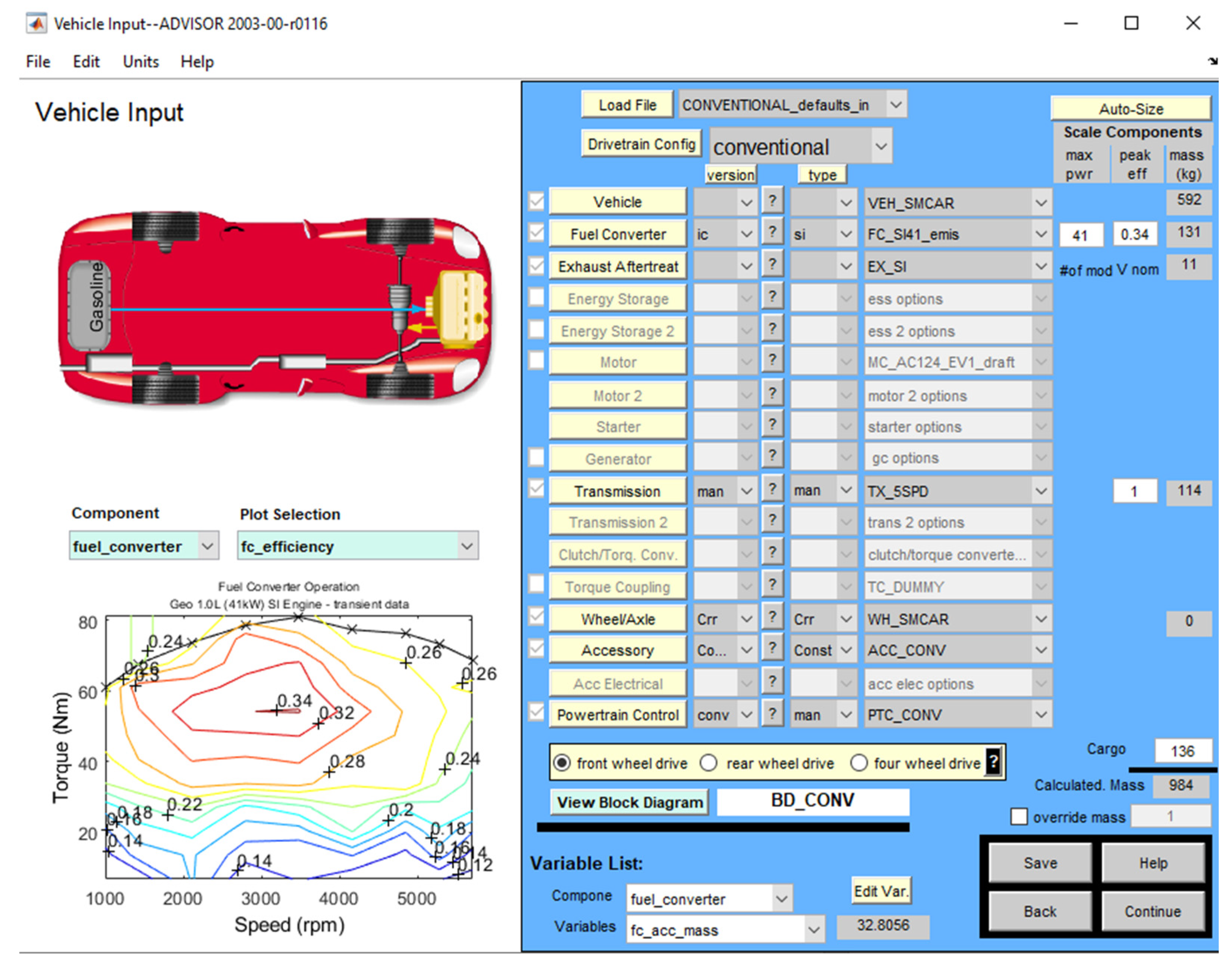
Figure 5.
Engine operation curves.
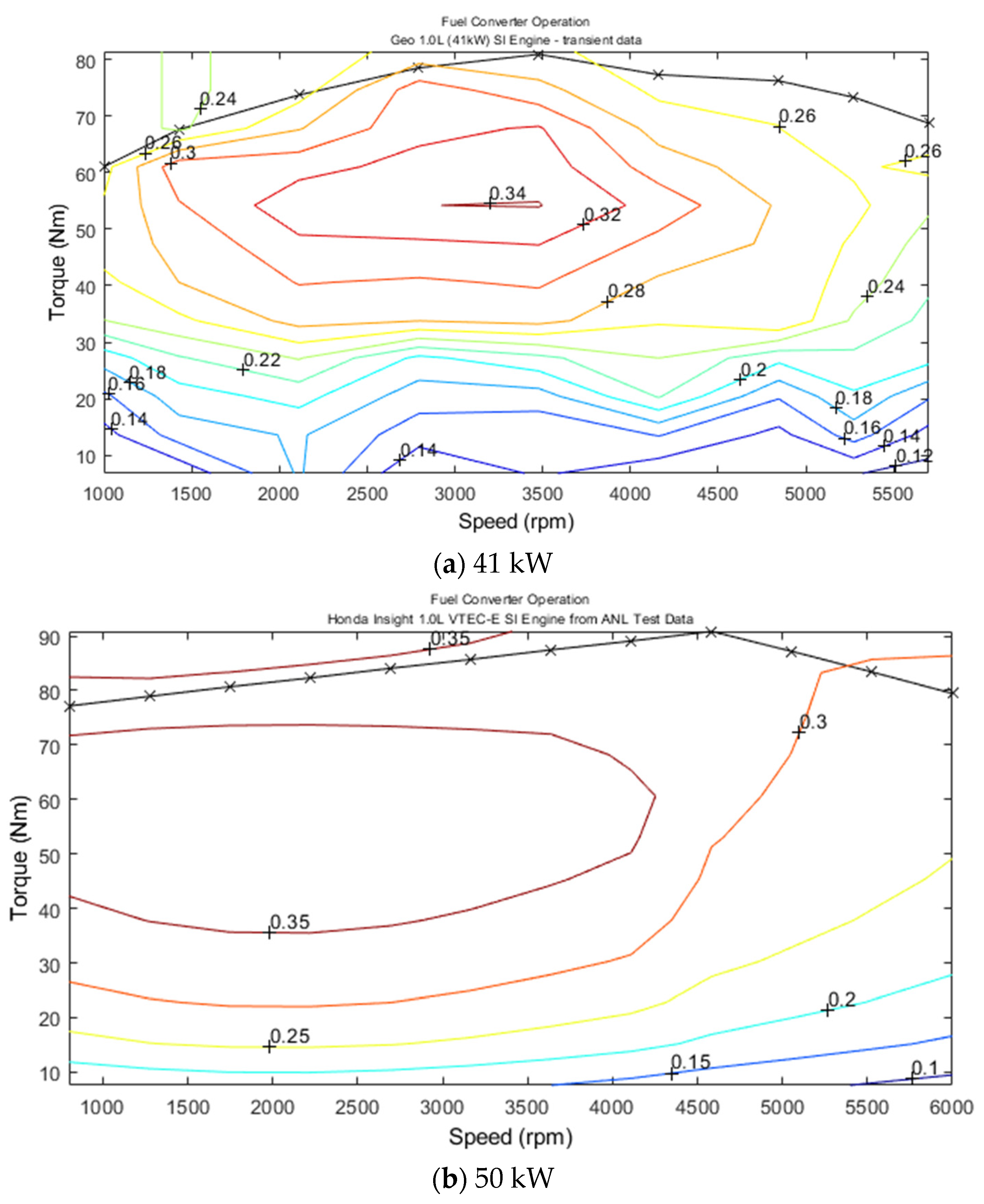
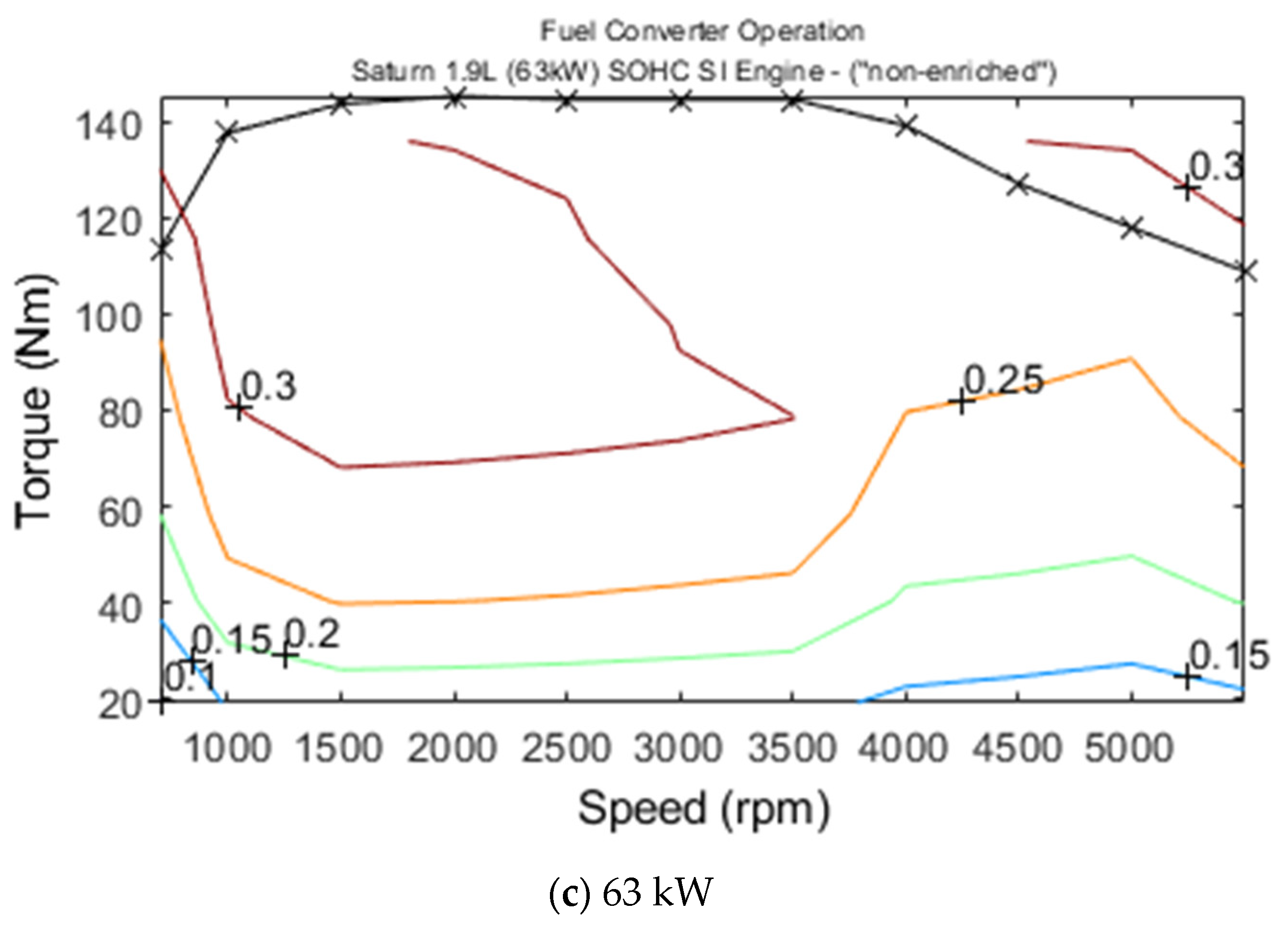
Figure 6.
Motor/Inverter operation curves.
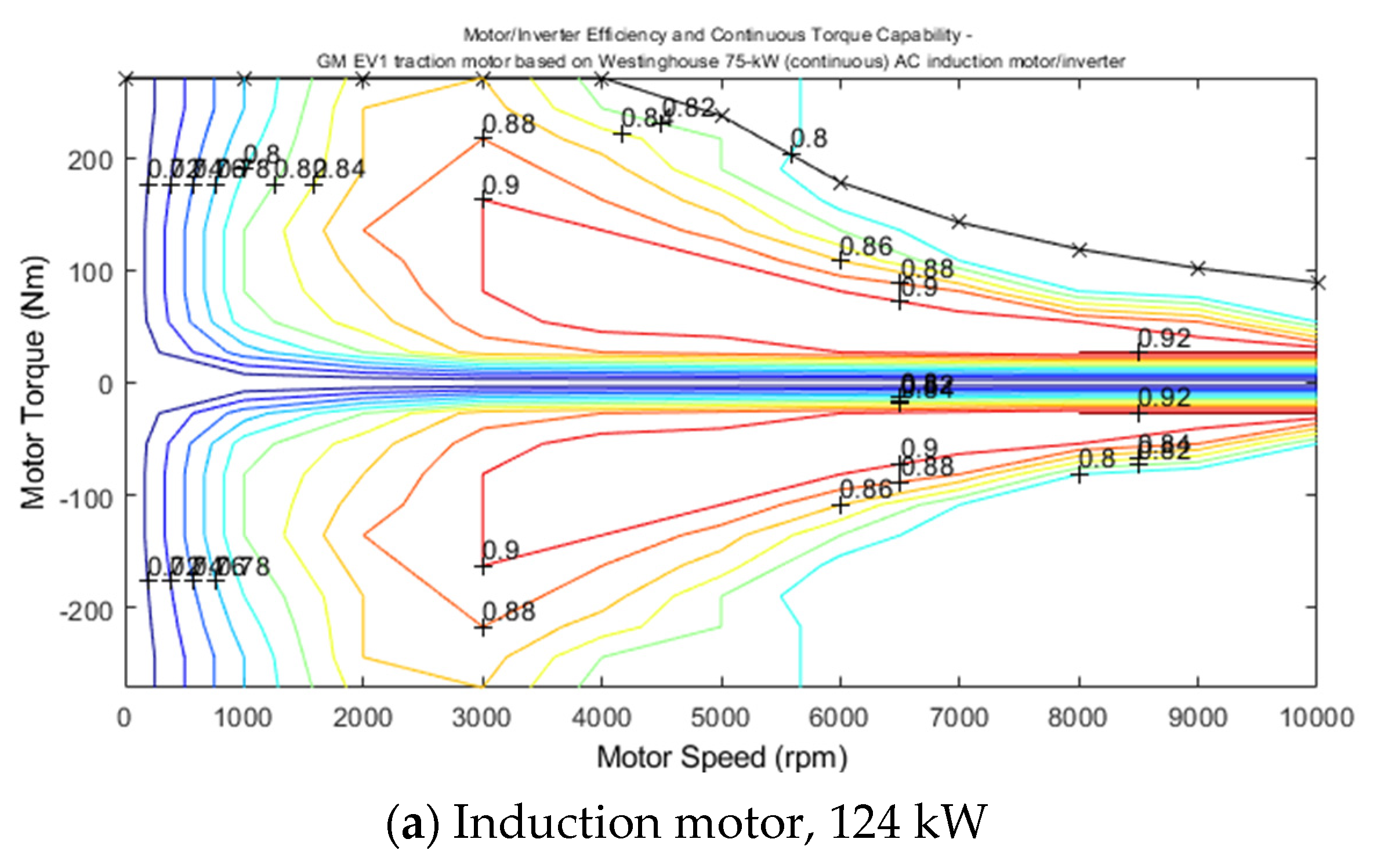
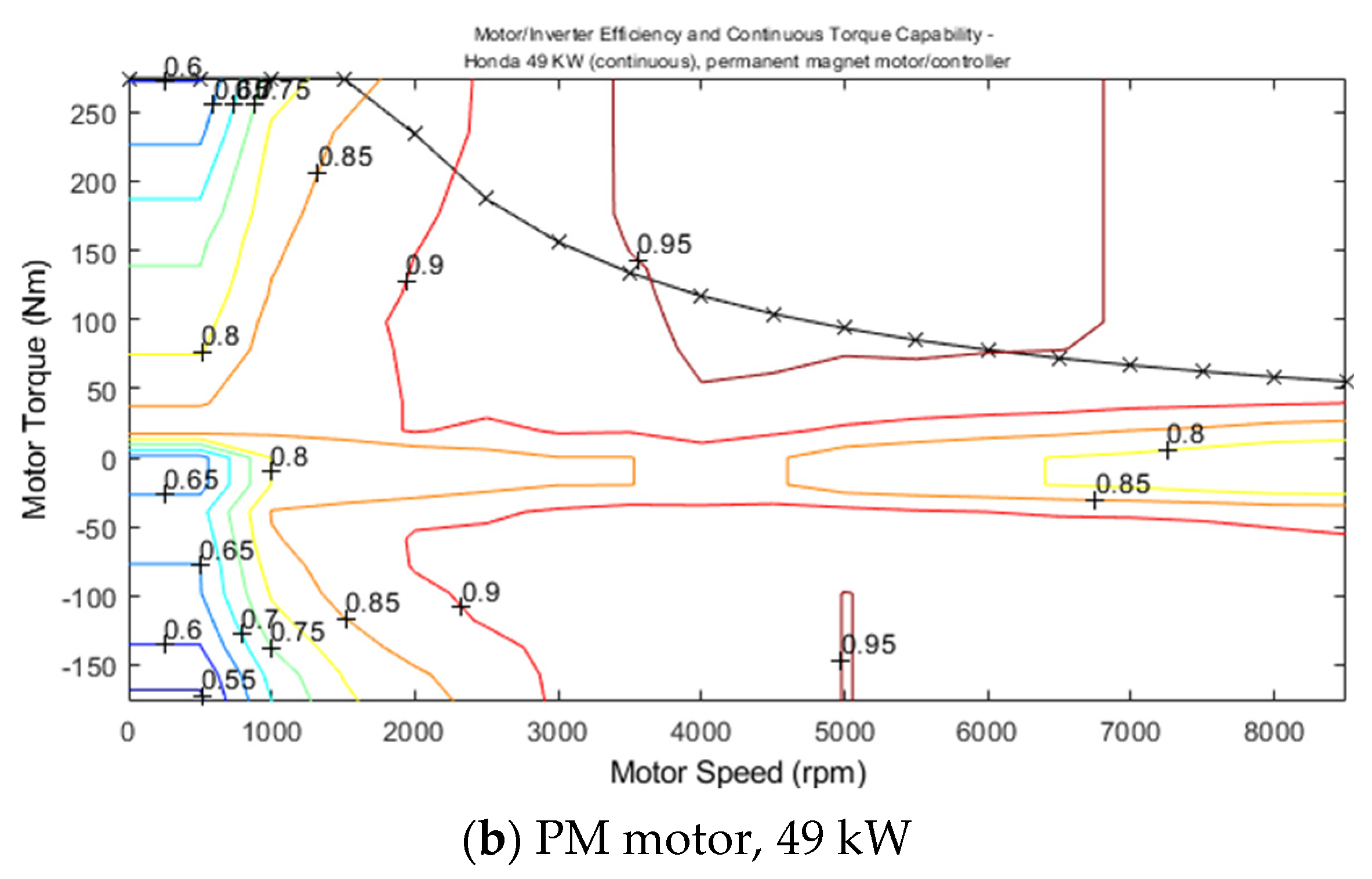
Figure 7.
Imposed driving cycles.
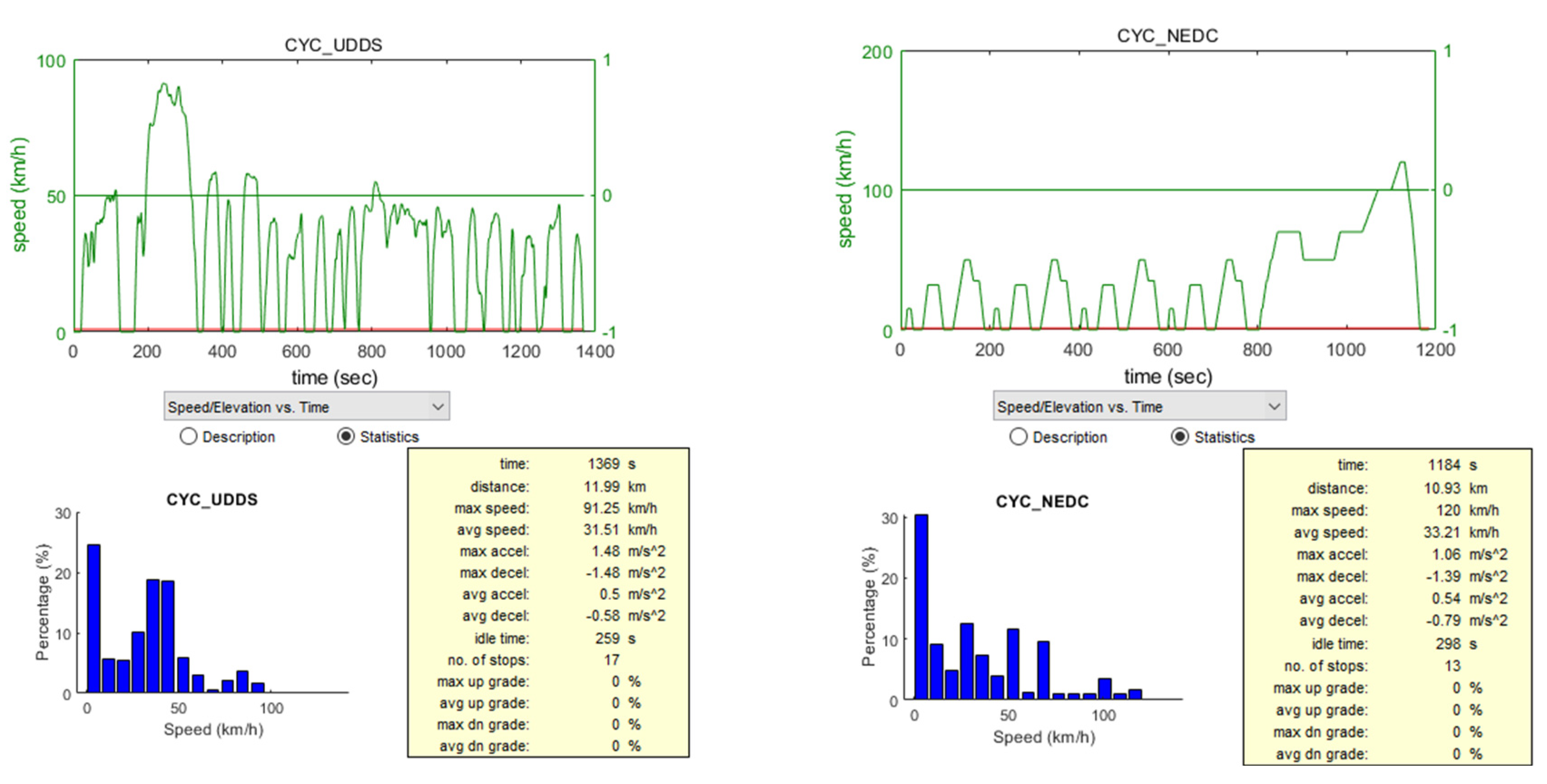
Figure 8.
Acceleration and gradeability test.
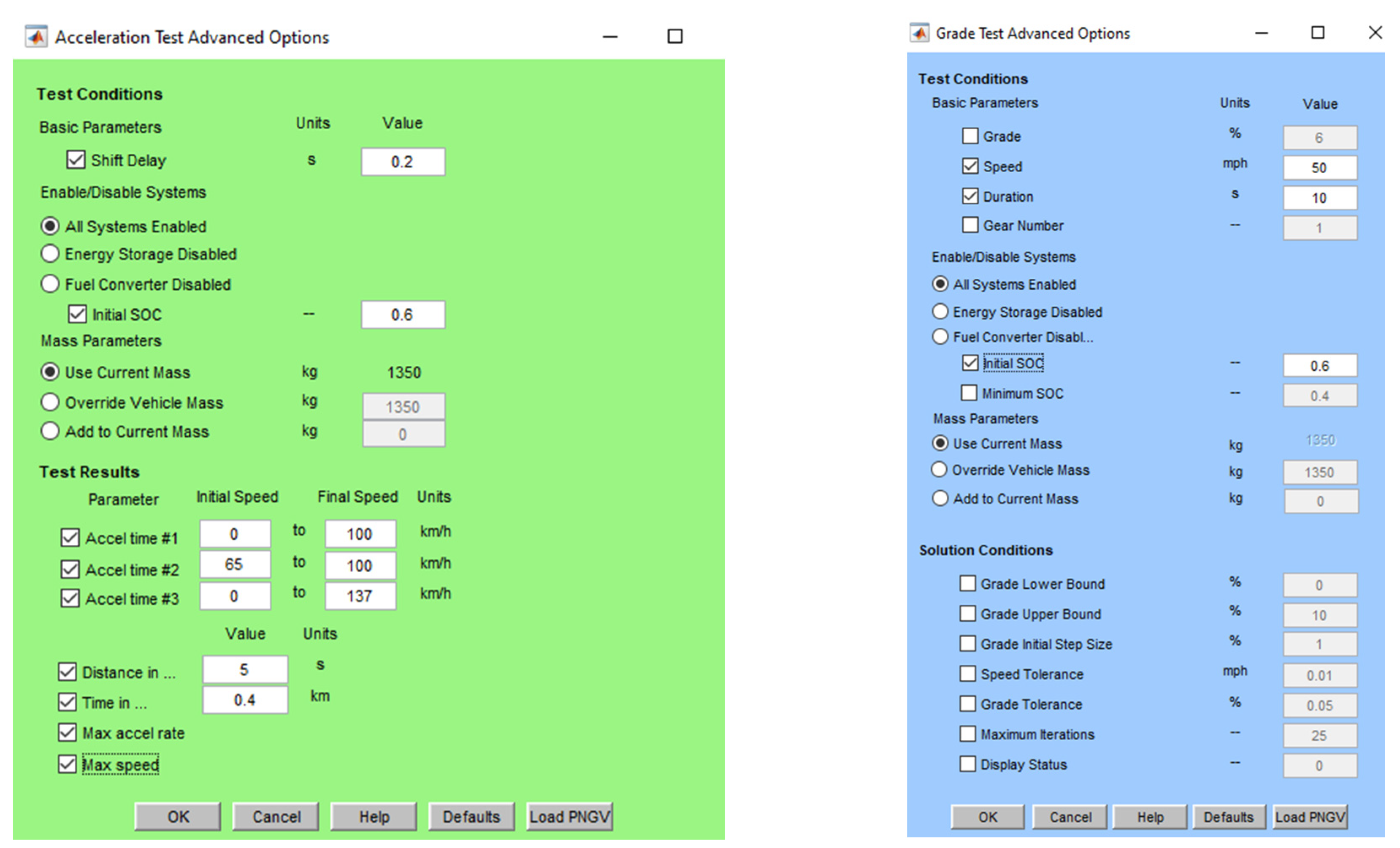

Table 1.
The performances of the series HEVs.
| Model | HS1 Engine 41 kW IM 124 kW 1373 kg |
HS2 Engine 50 kW IM 124 kW 1374 kg |
HS3 Engine 63 kW IM 124 kW 1448kg |
HS4 Engine 41 kW PM 49 kW 1342kg |
HS5 Engine 50 kW PM 49 kW 1343 kg |
HS6 Engine 63 kW PM 49 kW 1417kg |
|||||||
| Parameter | |||||||||||||
| 0-100 km/h [s] | 12.2 | 11.6 | 11.3 | 14.7 | 14.8 | 15.6 | |||||||
| 65-100 km/h[s] | 7 | 6.5 | 6.3 | 8.3 | 8.3 | 8.7 | |||||||
| 0-137 km/h[s] | 28.1 | 25.8 | 24.5 | 32.8 | 32.9 | 34.8 | |||||||
| Max. accel. [m/s2] | 5 | 5 | 5 | 3.8 | 3.8 | 3.6 | |||||||
| Max. speed [m/s] | 157.9 | 157.7 | 157.6 | 157.8 | 157.8 | 157.9 | |||||||
| Grade-ability at 80.5 km/h [%] | 18.5 | 20.4 | 21.1 | 13.3 | 13.3 | 12.5 | |||||||
| Driving cycle | UDDS | NEDC | UDDS | NEDC | UDDS | NEDC | UDDS | NEDC | UDDS | NEDC | UDDS | NEDC | |
| Consumption [l/100km] | 6.9 | 7.1 | 6.5 | 6.4 | 7.8 | 8.5 | 6 | 6.4 | 5.8 | 6 | 7.6 | 8 | |
| Overall efficiency | 0.096 | 0.118 | 0.104 | 0.132 | 0.086 | 0.102 | 0.107 | 0.13 | 0.114 | 0.14 | 0.088 | 0.107 | |
Table 2.
The performances of the parallel HEVs.
| Model | HP1 Engine 41 kW IM 124 kW 1350 kg |
HP2 Engine 50 kW IM 124 kW 1351 kg |
HP3 Engine 63 kW IM 124 kW 1425kg |
HP4 Engine 41 kW PM 49 kW 1319kg |
HP5 Engine 50 kW PM 49 kW 1320 kg |
HP6 Engine 63 kW PM 49 kW 1394kg |
|||||||
| Parameter | |||||||||||||
| 0-100 km/h [s] | 9.9 | 9.2 | 8.4 | 9.1 | 8.6 | 7.9 | |||||||
| 65-100 km/h[s] | 5.2 | 4.8 | 4.2 | 4.6 | 4.2 | 3.8 | |||||||
| 0-137 km/h[s] | 19.2 | 17.4 | 15.4 | 17 | 15.7 | 14.2 | |||||||
| Max. accel. [m/s2] | 5 | 5 | 5 | 5 | 5 | 5 | |||||||
| Max. speed [m/s] | 187.8 | 195 | 203.3 | 194.7 | 201.5 | 203 | |||||||
| Grade-ability at 80.5 km/h [%] | 23.7 | 28.5 | 30.3 | 24.3 | 30.4 | 31.2 | |||||||
| Driving cycle | UDDS | NEDC | UDDS | NEDC | UDDS | NEDC | UDDS | NEDC | UDDS | NEDC | UDDS | NEDC | |
| Consumption [l/100km] | 6.9 | 6.8 | 5.4 | 5.3 | 7.2 | 7.2 | 6.7 | 6.6 | 5.2 | 5.1 | 7.1 | 7 | |
| Overall efficiency | 0.094 | 0.122 | 0.122 | 0.158 | 0.093 | 0.12 | 0.095 | 0.124 | 0.124 | 0.161 | 0.094 | 0.121 | |
Table 3.
The performance of the CVs.
| Model | CV3 Engine 63 kW, 1059 kg |
CV2 Engine 50 kW, 985 kg |
CV1 Engine 41kw, 984 kg |
||||
| Parameter | |||||||
| 0-100 km/h [s] | 10.8 | 15.3 | 18.4 | ||||
| 65-100 km/h [s] | 5.6 | 7.7 | 9.7 | ||||
| 0-137 km/h [s] | 21.2 | 31.1 | 41.8 | ||||
| Max. accel. [m/s2] | 5 | 3.1 | 2.8 | ||||
| Max. speed [m/s] | 181.6 | 163.7 | 155.8 | ||||
| Gradeability at 80.5 km/h [%] | 20.2 | 18.4 | 10.5 | ||||
| Driving cycle | UDDS | NEDC | UDDS | NEDC | UDDS | NEDC | |
| Consumption [l/100km] | 6.8 | 6.9 | 4.4 | 4.5 | 5.8 | 5.9 | |
| Overall efficiency | 0.084 | 0.109 | 0.124 | 0.164 | 0.095 | 0.124 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



