
Submitted:
19 June 2024
Posted:
20 June 2024
You are already at the latest version
Abstract
Smart Transformer (ST)-based Meshed Hybrid AC/DC Microgrids (MHM) are a feasible alternative to increase the performance of conventional microgrids (MG) and to increase the penetration of Distributed Energy Resource (DER) at the same time, active and reactive power dispatch on the system. Despite this, MHMs present challenges in managing resources under uncertainties and controlling electronic converters associated with the ST and DER, making it complex to achieve optimal system performance. In this paper, a Data-Driven Distributionally Robust Optimization (DDDRO) for Day-Ahead Operation Planning of an ST-based MHM considering the reactive power dispatch of the DER that minimizes network losses, voltage deviations, and operation cost simultaneously, considering uncertainties of Photovoltaic Generators (PVG) and demand, is proposed. The Column and Constraint Generation (C&CG) algorithm and Duality-Free Decomposition (DFD) method are adopted. Besides, the original mixed-integer non-linear planning problem is converted into a Mixed-Integer (MI) Second-Order Cone Programming (SOCP) problem through second-order cone relaxation and positive octagonal constraint method. Simulation experiments and results with a connected MHM system demonstrate the effectiveness and performance of the proposed model. Finally, we observe the effect of the meshed structure of MG and the positive impact of integrating the ST to form MHM, taking advantage of the degrees of freedom of this multi-stage converter for optimal energy management under uncertain conditions.
Keywords:
AC/DC microgrid
; Data-Driven Distributionally Robust Optimization
; Duality-Free Decomposition
; Meshed Hybrid Microgrids
; Uncertainty
; Smart Transformer
1. Introduction
In line with the need to reduce greenhouse gas emissions, it is necessary to promote technological development to increase electricity coverage, integrated Battery Energy Storage Systems (BESS), and Distributed Generation (DG) schemes [1]. Microgrids (MG) are a suitable alternative to overcome the challenges of integrating Distributed Energy Resources (DER) into the Distribution System (DS), more flexible while improving the reliability and energy efficiency of the electrical grid [2]. Hybrid AC/DC Microgrids (HMG) combine the main advantages of AC and DC MGs with a high degree of reliability, flexibility, and economy [3]. HMG combines AC and DC networks in the same DS through Interlinking Converters (IC) and has been conventionally implemented based on radial distribution schemes with satisfactory results [4]. However, the high DER penetration can cause voltage increases [5]. High load demand can cause a significant voltage to decrease at the end of the line and, at the same time, overload distribution lines and connected transformers [6]; thus, voltage regulation is challenging, especially for long feeders [7]. Therefore, in recent years, Smart Transformers (ST) based Meshed Hybrid AC/DC Microgrids (MHM) [8] have been proposed as a feasible alternative to increase the penetration of DER [9] and reactive power control [10]. ST is an enabler element for HMG AC/DC loops under the Energy Router (ER) concept [11]. Due to the degrees of freedom of the ST, the MHMs can be enabled by interconnecting the Power Electronic Interface (PEI) of each DER with the ST stages at the DC or AC ports [8]. In addition to eliminating the need for IC (12), STs shape various energy flow paths and management strategies [8].

| Ref. | Year | Type System |
Type Problem |
ST | PQ Power Dispatch |
Uncertainties | DDDRO Approach |
Solution Algorithm |
Sub-problem |
|---|---|---|---|---|---|---|---|---|---|
| [12] | 2018 | DS | OP | - | Y | PVG – DM | Y | - | - |
| [13] | 2018 | HMG | OP | - | - | PVG – DM | Y | C&CG | nested-C&CG |
| [14] | 2018 | DS | OP | Y | Y | - | - | PSO | - |
| [15] | 2018 | DS | OP | Y | Y | - | - | - | - |
| [16] | 2019 | TS | UC | - | - | WT – DM | Y | C&CG | DFD |
| [17] | 2019 | TS | UC | - | - | WT – DM | - | BD | DT |
| [18] | 2019 | MG | UC | - | - | WT | Y | C&CG | DFD |
| [19] | 2019 | DS | UC | - | - | WT – DM | - | BD | DT |
| [20] | 2019 | HMG | OP | - | - | PVG – DM | - | C&CG | DT |
| [21] | 2019 | TS | UC | - | - | WT | - | C&CG | DT |
| [22] | 2019 | TS | PL | - | - | WT – PVG | Y | C&CG | DT |
| [6] | 2020 | MG | OP | Y | Y | - | - | - | - |
| [23] | 2020 | MG | PL | - | Y | WT – PVG – DM | Y | - | DT |
| [24] | 2020 | MG | OP | - | Y | WT – PVG – DM | Y | C&CG | DFD |
| [25] | 2020 | DS | PL | - | Y | PVG – DM | Y | C&CG | DF |
| [26] | 2020 | MG | OP | Y | Y | - | - | GA | - |
| [27] | 2021 | TS | UC | - | - | WT – DM | Y | C&CG | DT |
| [28] | 2021 | TS | PL | - | Y | PVG | Y | C&CG | DT |
| [29] | 2021 | TS | UC | - | - | WT | Y | C&CG | DT |
| [8] | 2021 | DS | OP | Y | Y | - | - | - | - |
| [30] | 2021 | HMG | OP | Y | Y | - | - | - | - |
| [31] | 2021 | HMG | OP | Y | Y | - | - | GA | - |
| [32] | 2021 | HMG | OP | Y | Y | - | - | - | - |
| [33] | 2021 | HMG | OP | Y | - | - | - | GA | - |
| [34] | 2021 | HMG | OP | Y | Y | - | - | GA | - |
| [35] | 2021 | DS | PL | - | - | PVG – DM | - | C&CG | DT |
| [36] | 2021 | TS | OP | - | - | WT | Y | C&CG | DFD |
| [37] | 2022 | MG | OP | - | Y | EV – PVG | Y | C&CG | DT |
| [38] | 2022 | HMG | OP | Y | Y | WT – PVG – DM – EV | - | PSO | PSO |
| [39] | 2022 | DS | OP | - | Y | WT | Y | C&CG | DT |
| [40] | 2022 | HMG | OP | Y | - | - | - | - | - |
| [10] | 2023 | DS | OP | Y | Y | WT – PVG – DM – EV | - | PSO | - |
| [41] | 2023 | DS | OP | Y | Y | WT – PVG – DM – EV | - | PSO | - |
| [42] | 2023 | MG | OP | - | - | PVG – DM | Y | C&CG | DFD |
| Proposed | 2023 | HMG | OP | Y | Y | PVG – DM | Y | C&CG | DFD |
TS: Transmission System; HMG: Hybrid Microgrids; DS: Distribution System; UC: Unit Commitment; OP: Operation; PL: Planning; WT: Wind Turbine; DM: Demand; PVG: Photovoltaic Generator; EV: Electric Vehicle; BD: Bender Decomposition; C&CG: Column and Constraint Generator; PSO: Particle Swarm Optimization; GA: Genetic Algorithm; DT: Duality Theory; DFD: Duality Free Decomposition; Y: Reported; -: No reported.
Despite the advantages of MHMs, the uncertainties of high penetration of DERs and demand have made day-ahead optimal scheduling of MGs difficult and complex [25]. Thus, it is necessary to introduce Energy Management Systems (EMS) to maintain the optimal operation of the MG. The EMS based on deterministic optimization algorithms loses accuracy due to the uncertainty of DER and consumer behavior [43]. Under this scenario, the optimization techniques that consider the uncertainty, mainly of the DERs, are integrated into the solution of the power flow optimization problem. According to the taxonomy of optimization proposed in [44], in optimization problems involving uncertainty in decision variables, one can opt for Stochastic Programming (SP) or Robust Optimization (RO) techniques [45]. The profile demand and DER’s probability distribution functions do not fully describe the random variable; therefore, applying SP is complex and challenging [46]. On the other hand, the RO technique tends to be more conservative than stochastic optimization since this depends on the choice of the worst-case scenario [47].
A Data-Driven Distributionally Robust Optimization (DDDRO) method to find the worst-case probability distribution over a set of ambiguities, i.e., a combination between SP and RO [36,48], has been developed. DDDRO uses historical information to create different scenarios considering the worst-case probabilities supported by a moment-based ambiguity set to define a probability distribution [49,50]. In DDDRO, it is possible to formulate a two-stage robust optimization, defined as the maximum cost over the uncertainty set [12,51]. A decomposition framework based on the Column-and-Constraint Generation (C&CG) approach [52] and Bender’s Decomposition (BD) [53] has been proposed to solve this kind of problem [22]. When the number of scenarios increases, and the problem is non-linear, it becomes very complex [16]; thus, a Duality-Free Decomposition (DFD) method has been proposed to transform the bi-level (max-min) problem into independent subproblems [16,24,36].
Table I summarizes the findings in the review of the main papers reported compared to the proposed model in this work. First, we seek to identify the publication date and system type addressed. Likewise, we aim to reach problem types related to the generation, transmission, DSs, expansion, or operation planning and if the integration of ST is considered. On the other hand, we seek to identify the works that study active and reactive power dispatch both in a deterministic and under uncertainties approach, considering the reactive power regulation of DG and ST. Finally, a scenario under uncertainty is introduced, in which we seek to identify the reported works that have presented studies approached to deal with uncertainty, either in demand or DER, as well as the formulation of the optimization problem, Data-Driven approach, and the solution approach adopted, mainly in the sub-problem.
According to the information compiled in Table I, it can be observed that typically the subproblem is approached from DT to convert the max-min subproblem into a single maximization problem; despite this, recent reports have started to introduce DFD techniques as an alternative to reduce the computational cost and convergence times [16], with favorable results in problems related to UC [16,18], PL [25] and OP [24,36,42]. Algorithms are implemented from decomposition methods such as C&CG and BD to address two-stage optimization problems. However, some work reports a heuristic approach using PSO-based techniques in both the master problem [10,14,41] and the subproblem [38]. The sources of uncertainty have been mainly contemplated in the WT, PVG, and DM. However, EV has started to play a more relevant role given the particular conditions of this type of element in power systems, whose management complexity implies a heuristic approach, typically PSO-based techniques [10,37,38,41]. Data-driven approaches have been widely used for both TS and DS; however, representative contributions have been identified for MGs and HMGs, typically for OP problems. In consideration of MHMs, although relevant works focused on the management and control of this type of MG have been identified, no contributions to the study of optimal management of MGs under uncertainty conditions involving a Data-Driven approach have been identified. This is evidenced in Table I, in which only the work reported in [38] contemplates uncertainty conditions whose solution alternative for the master problem and the subproblem is approached from heuristic techniques such as PSO, considering the ST as a Back to Back converter or two-stage ST with DC link port. On the other hand, EMS results have been identified from heuristic methods based on GA [26,31,33,34], but none of them contemplates uncertainty in the formulation of the optimization problem. On the other hand, it is observed that the works that consider reactive power dispatch and ST are typically formulated under a deterministic approach [6,14,15,26,31], taking advantage of the benefits of ST as an ER. On the other hand, works have recently been identified that consider ST for reactive power dispatch under uncertain conditions but propose a heuristic approach to solve the optimization problem [10,41].
Despite the degree of progress and relevant contributions of the DDDRO approach to deal with optimization problems under uncertainty both in UC, PL, and OP, applied to TS, DS, and MG, no works have been identified that take advantage of MHMs, considering that integrating the ST increases the degrees of freedom for a better performance of the EMS, and auxiliary services such as active and reactive power dispatch. In this context, a gap exists regarding EMS developments in MHMs integrating ST under uncertain operating conditions and reactive power dispatch; thus, the main contributions of this paper are the following:
- ✔
- An equivalent model of ST and VSC is formulated to determine the impact of reactive power regulation from variable power factors on voltage deviation and loss minimization in ST-based MHM in an optimal power flow problem under uncertainty.
- ✔
- For day-ahead operation planning of the ST-based MHM, a DDDRO is proposed to consider DGs’ active and reactive power dispatch, the uncertainty of photovoltaic generators (PVG), and demand.
- ✔
- A tri-level master-subproblem framework based on the DFD method and the C&CG algorithm is developed to solve the day-ahead operation planning of an ST–based MHM.
The following paper is organized as follows. Section II proposes a Deterministic Optimal Model, organized according to constraint (2.A), Objective Function (2.B), Second-order cone relaxation, and Positive octagonal constraint method (2.C), followed by a Modeling and solution under uncertainty by DDDRO, in Section III, where an ambiguity set for uncertainty (3.A), a Two-Stage Robust Optimization Model (3.B), and Duality-Freed Decomposition (3.C) is proposed. Section IV presents Case Studies and Results, in which the system’s performance, both on the AC and DC sides, is analyzed. The discussion of the results is presented in Section V. Finally, the conclusions are presented in Section VI.
2. Deterministic Optimization Model
In this paper, the ST, the voltage source converter (VSC), and the BESS are optimized for active and reactive power dispatch control, increasing efficiency and reducing the operational costs of the HMG. This section presents the objective function and constraints of the deterministic optimization model.
2.1. Constraint
The optimization model established in this paper must satisfy the constraints of VSC, ST, BESS, and power flow. The main constraints can be described as follows.
2.1.1. Voltage-Sourced Converter
The DERs considered in this work operate in connected mode through a VSC and bidirectional DC-DC converter. The VSC allows making active and reactive power control independently on the AC side, while the bidirectional DC-DC converter does the same for active power control on the DC side; according to the availability resource of the PVG, the State of Charge (SoC) of the BESS and the active power balance between AC and DC sides.
Figure 1 represents the simplified equivalent power flow model for the VSC, which is used as the PEI for PVGs, BESS, and the third stage of the ST. The variables on the AC side are the voltage and phase at the bus () and on the DC are the voltage at the bus (). The coupling for the AC/DC power flow is selected from the active power on the AC side () and the active power on the DC side (), whose bidirectional power transfer presents losses () related with the switching of the VSC’s IGBTs [54]. According to the equivalent model, the power flow equations in the VSCs of the microgrid are established from (1) and (2). These relate to the as a non-lineal function of the loss coefficient () and capacity limit of inverter, which in turn depends on the and reactive power () transfer of the VSC on the AC side. depend on the power and characteristics of the inverter [43,55].
According to the proposed methodology, the DER’s VSCs are intended to offer auxiliary services related to active and reactive power control in the MHM, limited by the VSC’s apparent power rating () in (3). The operating region of the inverter can be seen in a PQ plane representing the semicircle around the positive active power axis, defined according to the operation of the VSC [56].
Figure 2 (a) shows the VSC’s operating region (yellow zone) coupled to the PVG in the PQ plane. This region is considered a minimum power factor () value that sets the operational limit of the VSC under (green dashed line). Thus, the reactive power () available for dispatch is restricted to the amount of active power () available in the PVG based on a Maximum Power Point Tracking (MPPT) algorithm.
Meanwhile, Figure 2 (b) presents the zones of operation (blue zone) of the BESS’s VSC in the four quadrants since the BESS operates in charge () or discharge () mode limited by the maximum active power in the VSC and physical characteristics of the BESS (). In both modes of operation, the BESS’s VSC can control the reactive power injection (). A similar operation is proposed for VSCs coupled between the AC and DC side, whose operating point is set by the active power balance given by (1). The PVG and BESS’s operational restrictions of the reactive power injection are defined as follows (4) y (5), respectively, where , it’s equivalent to the phase at .
2.1.2. ST Equivalent Power Flow Model
The ST is a multi-stage power electronic converter with multiple Low Voltage (LV) and Medium Voltage (MV) ports, both AC and DC. The ST is more than a straightforward substitute for the conventional Low-Frequency Transformers (LFT) (60 Hz or 50 Hz). This device supplies many services and eases the integration of new hybrid AC and DC microgrid architectures. It can inject or absorb reactive power, mitigate harmonics [14], mitigate voltage sag [57], and limit current in the event of short-circuit faults [58]. In an ST-commanded grid, distributed resources are connected on the side or the side asynchronously with the grid side so that the low-voltage DC or AC frequency can be used as a feedback signal for power flow control. In this way, the power routing function is effectively achieved.
Figure 3 shows the structure of an ST with each control and communication layer. The stages of the ST adopt a decoupled control structure, which allows power flow control independently and bidirectionally, thus obtaining a greater degree of freedom for power flow control on the AC and DC side. Therefore, the ST concept was proposed in [59], which provides DC connectivity [60] and reduces the reinforcement in the distribution network caused by the increasing penetration of DER and BESS. The ST allows the formation of a hybrid meshed DS that provides voltage and power flow control to be achieved simultaneously with a centralized controller.
For power flow analysis in the MHM, the second stage output of the ST is modeled as a controlled DC feeder () is considered a slack node since it regulates the DC side’s voltage level.
ST’s third stage allows and power injection on the AC side or active power () on the DC side; thus, the conventional VSC is replaced by an active VSC for active and reactive power dispatch according to the optimization mechanism. So, a DC generator () is introduced in the load flow equations associated with the DC side. The equivalent model for power flow studies at the AC and DC coupling ports of the ST are presented in Figure 4, and the power flow equations are described by (14), (15) for the AC side, and (17) for the DC side. In the same way, reactive power control is done similarly as proposed in (4) and (5).
2.1.3. Battery Energy Storage System
The BESS power flow model shapes the constraints associated with the energy storage elements on both the AC and DC sides. The power flow equations for all time he BESS, from (6) to (10), are based on the model proposed in [43].
Where, for the BESS, represents binary variable indicating BESS charging, represents binary variable indicating BESS discharging; and represent the charging and discharging power, respectively; and represent the charging and discharging efficiency of the BESS. Finally, the battery state of charge is represented by . The model of the battery on the DC side is similar to those presented in equations (6) to (10), with the corresponding changes to the indexes and superscripts. The reactive power dispatch of the BESS on the AC side is given by (5).
2.1.4. Power Flow Constraints
Power flow constraints are established on the MHM’s AC and DC sides. On the AC side, the equations are formulated in polar form from the network admittance matrix based on the pi model of the line. On the DC side, the equations are developed from the conductance matrix and the voltage at the DC buses. The array represents the series admittance of the line while represents its susceptance on the AC side. On the DC side, the conductance is represented by . The active power and reactive power flowing through the line on the AC side, in per unit (p.u.), is calculated from (11) and (12).
Where . The active and reactive power balance is presented according to (13) and (14).
Where are the nodes directly connected to node . The active power flowing through the line on the DC side, in per unit (p.u.) is calculated from (15). The active power balance at a node , is given by (16). Where are the nodes directly connected to node .
2.2. Objective Functions
The optimization problem aims to minimize the expected operational cost, loss, and voltage regulation over various time horizons (24 H OP) while satisfying various MHM`s physical constraints. Specifically, the objective function (), for all time , should include (i) the operation cost (); (ii) network losses (); and (iii) voltage deviation (), due in (17). , and are the weight factors of network losses (), voltage deviation () and operation cost (), and . Where , , and correspond to the costs of energy exchange with the main medium voltage grid and the operating costs of the BESS, both on the AC and DC sides, respectively. On the other hand, , , , , , , , and relate to the generator set, BESS set, PVG set, and Loads set on both AC and DC sides, respectively.
2.3. Second-Order Cone Relaxation and Positive Octagonal Constraint Method
This work transfers the power flow model to a second-order conic model based on the relaxation technique for its fast solution. Thus, second-order cone relaxation [61] and positive octagonal constraint method [43] are used. Firstly, the power flow on a distribution network can be precisely reformulated by introducing the variables , , , and [61]; in the rectangular formulation provided in (12) and (13). Thus, we obtain the equations in (18) and (19).
On the DC side, the variables , , and are induced in the equation given in (16). Thus, we obtain the equations given in (20).
Equations (18) to (20) linearize the expressions for the power flow through the lines on both the AC and DC sides. Still, additional constraints must be imposed to represent the underlying trigonometric nature of the AC power flow. The symmetry property of the sine and cosine functions is ensured from the trigonometric relationships (21) to (23).
VSC loss constraint (2) is a non-linear quadratic constraint, which can be further relaxed to the following second-order cone constraints given by (24) [43].
On the other hand, the circle constraints from (3) can be transferred into (25) based on the convex relaxation technique and positive octagonal constraint [43], respectively. Using convex relaxation and positive octagonal constraint, the original optimization model is reformulated as the following SOCP model in (26) for all time .
3. Modeling and Solution under Uncertainty by DDDRO
This section develops a DDDRO approach to solve the day-ahead operation planning of MHM under uncertainties based on a combination of the C&CG and the DFD methods.
3.1. Ambiguity Set for Uncertainties
In real applications, probability distribution functions of DERs may not be available. In this way, historical data is a more suitable approach to obtain an approximation of the probabilities of a scenario of interest [24]. Thus, historical data can be converted into data bins, where an estimated probability distribution function (E-PDF) is established from the data bins, which allows the definition of the true probability distribution function (T-PDF) within a tolerance range. In [24,28], a confidence uncertainty set is proposed to cover all possible probability realizations by making the most of historical data and then estimating the distribution of worst-case uncertainties for all scenarios () according to the number of data bins (). Two norms and are used to construct the confidence uncertainty set based on T-PDF () and E-PDF () [62].
The parameters and , define the tolerance coefficient of the confidence level and historical data. As the number of historical data samples () increases, the uncertainty set is reduced, and the E-PDF becomes closer to the T-PDF. If the confidence level of two norms are described as and , the tolerance ranges can be defined according to (27). The ambiguity set provides information to reconstruct the T-PDF within a confidence level. This paper adapts the idealization approach presented in [28], defined from (28) to (33). Note that the ambiguity set represents the can variate from the using the historical data in a maximum error of , which depends on and .
3.2. A Two-Stage Robust Optimization Model
For the DDDRO problem statement, the objective function due in (17) was reorganized; thus, the variables associated with the energy storage battery system, such as the active power charging , active power discharge , and active power available in the battery , both on the AC and DC sides; they are considered decision variables in the first stage of the DDDRO problem statement. In this stage, the decision variables that minimize the operating costs of the BESS and the worst-case operational scenario of the second stage are optimized.
The exogenous variables subject to uncertainty are the PV generator profile and the demand profile given these variables’ stochastic nature, the other variables are minimized after the worst-case scenario has occurred. A DDDRO model aims to find the optimal solution under the worst-case probability distribution under each scenario . Thus, a two-stage, three-level problem is defined in (34). Where represents the decision variables of the first stage; represents the decision variables of the third level in the second stage; and finally, represents the decision variables of the second level in the second stage.
3.3. Duality-Free Decomposition Method
The C&CG algorithm approach includes the master-problem (MP) due in (38) and the subproblem (SP) due in (35). The subproblem aims to find the uncertain set’s critical scenario that provides an upper bound (UB). Next, new variables and constraints are added to the master-problem to obtain a lower bound (LB). The master-problem and subproblem are solved iteratively (), and the method stops until the relative difference between the upper and lower bounds is less than a preset convergence tolerance .
3.3.1. Subproblem
For a given set of specific first-stage variables in the iteration as , we can establish a second-stage bi-level “max-min” model to find the worst-case scenario . Two parameters are set for this stage: input parameters and output parameters, after completion of each iteration , . Each output parameter corresponds to a feasible solution of the SP at each iteration , for all scenarios . The complete SP formulation is defined by (35).
The subproblem is a max-min bilevel problem with a structure that can be decomposed into several small subproblems without the duality information [16]. Given that between constraints associated with and associated with , there are no variables in common, the feasible region bounded by the variables is disjoint with the confidence set , therefore, the summation (∑) operator and the min( ) operator can be interchanged [16,18,24,36,42]. Thus, the max-min problem of the second stage can be formulated as follows (36) and (37).
For each scenario an optimal solution () is obtained from (37), which is fixed in (36), to find the probability of the worst-case scenario .
3.3.2. Master Problem
When the sub-problem is solved, an optimal value and the worst-case probability are obtained; This gives an upper bound for the original model. Then, a set of extra variables and associated constraints are generated and added to the master problem by fixing the optimal probability from the subproblem. If the sub-problem is feasible, we can create variables and assign the following constraints to the master problem with the fixed optimal probability at the iteration which are called “optimality cuts”. Where is a dummy continuous variable defined as a restriction in (39). Two parameters are set for this stage: input parameters and output parameters, after completion of each iteration , . Each output parameter corresponds to a feasible solution of the MP at each iteration . The complete MP formulation is defined by (38) and (39).
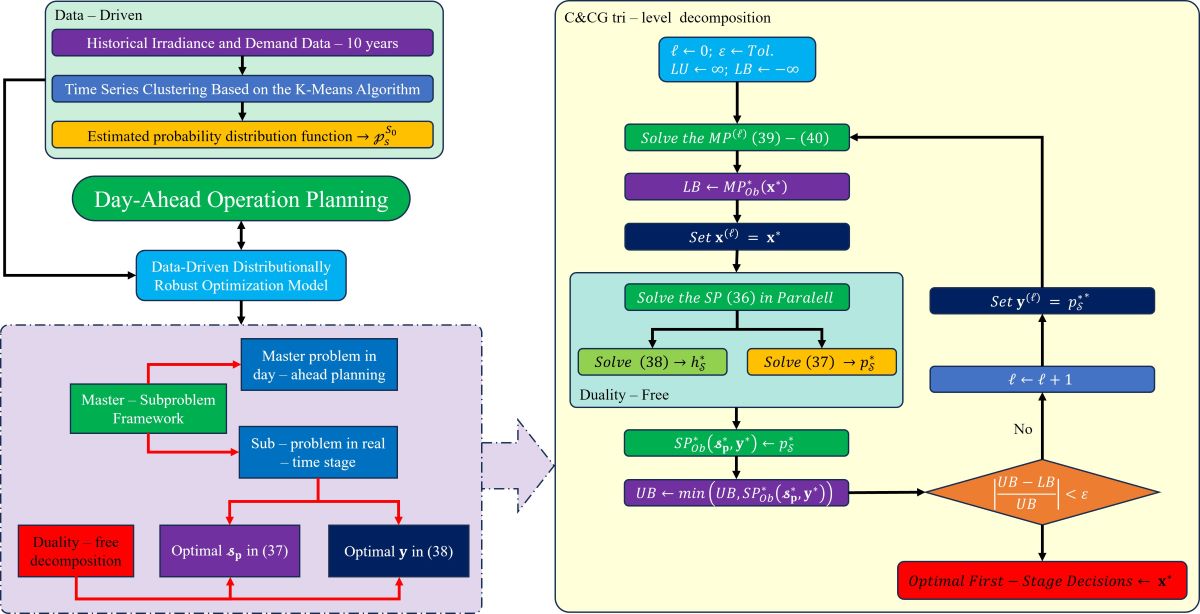
To sum up, the solution methodology of this study is illustrated in Figure 5, and a tri-level decomposition is adopted to solve the data-driven robust optimization problem in (34), the procedure of which can be summarized as follows:
The solution methodology has three key elements: Data-Driven, Master-Subproblem framework, and combining C&CG with DFD.
4. Case Studies and Results
This section uses case studies to validate the DDDRO framework for day-ahead operation planning for both VSC-based MHM and ST-based MHM. First, the parameters and schemes of the system under study are presented, followed by the simulation results using an uncertainties approach. In addition, comparison results and sensitivity analysis as a function of the ambiguity set are also shown.
The DDDRO framework was programmed in Python 3.9.5 in the Spyder 5.4.2 integrated development environment under the Pyomo 6.5.0 framework. To solve the MP, we use the solver Mixed-Integer Non-linear Decomposition Toolbox in Pyomo (MindtPy) [63], and for SP, we use the Interior Point Optimizer - Ipopt. All algorithms ran on a personal computer with Intel(R) Core (TM) i7-10710U CPU and 16 GB of RAM. Historical sample data for PVG and demand, from 2012 to 2022, for Bucaramanga city are considered and available in [64,65].
4.1. Benchmark Test-System
Analysis cases were proposed, referencing the Benchmark reported in [66]. It takes the parameters of the lines, loads, and busbar connections of the North American configuration low voltage DS with radial structure. A one-line equivalent modified MHM schematic of the interconnection of the LV commercial sub-networks is shown in Figure 6.
The MG in Figure 6 consists of 15 AC busbars and 11 DC busbars. It has a feeder connected to , which corresponds to the low voltage output of the transformer secondary at the common coupling point. The coupling of the 15 AC busbars with the 11 DC busbars is made from two VSCs coupled between and bus , bus and bus , and finally, the ST is connected to the bus and bus . PVG of 28.6 kWp on the AC side and 28.38 kWp on the DC side is integrated; this equates to approximately 90% of the demand, considered a system with high PVG penetration. Likewise, BESS is introduced on both the AC and DC sides coupled to their respective PEI with a capacity of 120 kWh. The connection of the PVG and BESS is distributed according to FIGURE 6. It should be noted that the MHM features a second 12.47 kV MV feeder connected at the first stage of the ST.
4.2. Tests Cases and Results
Two case studies are proposed to determine the performance of the DDDRO framework for both VSC-based MHM and ST-based MHM, in which one level of PVG penetration (High - 90 %) are presented, considering the uncertainty approach in both, the demand and the PVG. The following cases are considered: Case I - Data-driven distributionally robust operation of the VSC-based MHM and Case II - Data-driven distributionally robust operation of the ST-based MHM.
Data-driven methodology produces typical power scenarios and related confidence uncertainty sets. Historical data (87600 h) on irradiance and demand power in Colombia’s northwest over ten years is considered. According to the results reported in [27,67,68], the sample space can be partitioned into six data bins to represent random output power scenarios and produce discrete probability distributions. Therefore, in this paper, clustering methods such as K-means are employed to aggregate all data points into a representative scenario in each bin so that the estimated probability distribution is obtained by counting the frequency of data samples falling into each bin, considering the averaged metric of irradiance and demand as representative scenarios, i.e., the data bin. In this context, Figure 7 shows six clusters (scenarios) defined with the corresponding probability using historical data.
Case I and Case II are compared to determine the performance of the MG by including the ST under a worst-case uncertainty scenario. To determine the performance indicators in Case I and Case II, the optimal solution of the MP about the decision variables of the BESS, and the worst-case generation profiles with the respective associated probability were taken as a reference to determine the feasible solution of the operational costs of SP.
4.2.1. Case I
A day-ahead operation plan for the VSC-based MHM under uncertainty operation is investigated in this case. Operating BESS without ST interconnection costs $ 14.62918/kW. Figure 8 (a) and Figure 9 (a) show the active and reactive AC power dispatch of the AC feeder, the VSCs, the PVGs, the charge and discharge power of the BESS, and the total demand. The total energy supplied by the feeder and PVGs on the AC side is 812.58 kWh. On the DC side, the total energy provided by the feeder and PVGs is 149.57 kWh. Figure 10 (a) shows the active power dispatch of the DC PVGs, the charge and discharge power of the BESS, and the total demand.
Figure 11 (a) and (b) show a heat map of the voltage profiles on the AC and DC side buses in p.u., respectively, for 24 hours. The Slack node on the AC side is set by the main feeder connected to the bus , and on the DC side, the low voltage DC port of the ST connected to the bus . The buses with peak demand they present moderate voltage sag and overvoltage in the buses where the PVGs are connected during the generation peak. The voltage deviation on the AC side is close to 0.07031 p.u., and on the DC side, it is 0.02327 p.u.
4.2.2. Case II
In this case, a day-ahead operation planning of the ST-based MHM under uncertainty is investigated. Operating BESS with ST interconnection costs $ 8.9043/kW. Figure 8 (b) and Figure 9 (b) show the active and reactive AC power dispatch of the AC feeder, the VSCs, the PVGs, the charge and discharge power of the BESS, and the total demand. The total energy supplied by the feeder and PVGs on the AC side is 256.32 kWh. On the DC side, the total energy provided by the feeder and PVGs is 701.94 kWh. Figure 10 (b) shows the active power dispatch of the DC feeder, DC PVGs, the charge, and discharge power of the BESS, and the total demand.
Figure 12 (a) and (b) show a heat map of the voltage profiles on the AC and DC side buses in p.u., respectively, for 24 hours. Likewise, as in case I, the Slack node on the AC side is set by the main feeder connected to the bus , and on the DC side, the low voltage DC port of the ST connected to the bus . The effect of the reference buses is shown in Figure 12 since they are the zones that remain with values close to the reference during the operation period. However, the buses with peak demand present moderate voltage sag and overvoltage in the buses where the PVGs are connected during the generation peak. The voltage deviation on the AC side is close to 0.03279 p.u., and on the DC side, it is 0.02527 p.u.
5. Discussions
According to the results of Case I and Case II, the total energy of the AC side feeder has an 80% reduction in Case II compared to Case I. On the DC side, a variation from 0 kWh in Case I to 552.36 kWh in Case II is observed, given the functionality of the ST. As for the cumulative reactive power of the AC feeder, it presents a reduction closer to 23% in Case II compared to Case I. Similarly, Despite testing under the worst case within the uncertainty scenarios, it is observed that the total charging and discharging power of the BESS is reduced by 44% and 34%, respectively, in Case II compared to Case I. Regarding reactive power in the BESS, a slight reduction is observed in Case II concerning Case I, given that, with the higher availability of active power in the PVG, the availability of reactive power increases, and this increase is reflected in the decrease of reactive power available in the BESS, as well as the power available at the ST’s VSC
Finally, on the DC side, the impact of the ST and the effect of the compensation of the worst-case scenario is observed since the utilization of the BESS is reduced according to the optimization objectives, mainly in the MP; additionally, the effect of the ST as a controlled DC feeder is reflected. Table 2 presents comparative data of the system’s total active and reactive power under an uncertainty approach with management and demand profiles according to the system operation case. Table 3 compiles the values for each of the optimization problem objectives, which demonstrates the positive impact of ST coupling on the MHM.
According to the system performance indicators, the ST has a strong influence and positive impact on system performance under uncertain conditions. The ST reduces the system’s operational costs, losses, voltage deviation, and operational costs of the BESS. That is, despite the high probability of the worst-case scenario, the energy management system for an ST-based MHM under uncertainties can reduce the operational cost of the BESS by 50%, 30% losses, and 50% voltage deviation on the AC side. However, it is observed that, although it is a reduced value, the voltage deviation on the DC side remains stable; this is related to the high penetration of PVG and the power balance of the system. On the other hand, the BESS is the main element for reactive power dispatch in the MG, supported by the PVGs, the bidirectional transfer of reactive power in the VSCs, and the third stage of the ST to meet the demand and voltage regulation. For this analysis, the results of Case II were taken as a reference for the results of this operating case. In this way, we seek to establish the incidence of the size of historical data and the confidence level with the objective function.
Table 4 reflects the total cost under the constraints of different historical data quantities. It can be seen from the table that with the increase in the number of historical data, the total cost planning (Objective Function) may decrease and converge at 4058.77. The reason is that more abundant information shrinks the confidence uncertainty set and makes the empirical probability distribution closer to the truth. That indicates if enough data is integrated, there is no need to consider the probability distribution uncertainty in operation planning problems.
The influence of confidence level on the objective function results is analyzed as shown in Table V, from which we can see that the total cost of objective function increases with the confidence level increase because the model is more conservative at a higher confidence level. Thus, a confidence level, , directly affects to and , which, in turn, condition the maximum error between the and , which incurs more conservative operating planning schemes for the uncertain environment; therefore, for the data-driven approach, level acceptance, according to the worst-case operational scenario, can be adjusted by setting the value of , or the sizing of historical data.
5. Conclusion
This paper proposes a DDDRO model for ST-based - MHM. The confidence set for the probability distribution of uncertainties is constructed from historical data to obtain a robust solution while avoiding being overly conservative. The ST’s DC low voltage port is considered a controllable feeder to supply active power to the DC side and to coupling VSC’s input port with the MHM’s AC side. Similarly, the ST is used to deal with the power exchange with the medium voltage grid and solve the Day-Ahead Operation Planning problem; likewise, being integrated with the other DER’s PEI, it allows the Reactive Power Dispatch in a decentralized way. Considering the structure of the proposed DDDRO problem, a duality-free decomposition method, second-order cone relaxation, and positive octagonal constraint method are adopted to reduce the computational burden. A modified MHM of 14 AC buses and 11 DC buses is studied. The agreements between the ST and the PEIs can be achieved in a few iterations by integrating with the C&CG algorithm. In the proposed DDDRO model, the utilization of the BESSs is preserved without sacrificing the economic efficiency of the whole system under the worst-case operation.
Author Contributions
R.A.N.-R.: conceptualization, methodology, data curation, writing—original draft preparation; C.U.-V.: supervision, formal analysis, resources, validation, data curation; J.P.: conceptualization, methodology, visualization, investigation, project administration; O.P.-A.: methodology, writing—reviewing and editing, funding acquisition. All authors have read and agreed to the published version of the manuscript.
Funding
This research was partially supported by the Science, Technology, and Innovation Fund of the General System of Royalties under the Excellence Scholarship Program-Ministry of Science, Technology, and Research–Minciencias-Colombia.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- M. A. Judge, A. Khan, A. Manzoor, and H. A. Khattak, “Overview of smart grid implementation: Frameworks, impact, performance and challenges,” J. Energy Storage, vol. 49, p. 104056, May 2022. [CrossRef]
- G. Chicco et al., “Introduction—Advances and Challenges in Active Distribution Systems,” in Lecture Notes in Electrical Engineering, vol. 826, Springer Science and Business Media Deutschland GmbH, 2022, pp. 1–42.
- 3. S. K. Sahoo, A. K. Sinha, and N. K. Kishore, “Control Techniques in AC, DC, and Hybrid AC-DC Microgrid: A Review,” IEEE J. Emerg. Sel. Top. Power Electron., vol. 6, no. 2, pp. 738–759, Jun. 2018. [CrossRef]
- M. Debouza, A. Al-Durra, T. H. M. EL-Fouly, and H. H. Zeineldin, “Survey on microgrids with flexible boundaries: Strategies, applications, and future trends,” Electr. Power Syst. Res., vol. 205, p. 107765, Apr. 2022. [CrossRef]
- L. Jia, Y. Zhu, and Y. Wang, “Architecture design for new AC-DC hybrid micro-grid,” in 2015 IEEE 1st International Conference on Direct Current Microgrids, ICDCM 2015, Jun. 2015, pp. 113–118. [CrossRef]
- R. Zhu, M. Liserre, M. Langwasser, and C. Kumar, “Operation and Control of Smart Transformer in Meshed and Hybrid Grids,” IEEE Ind. Electron. Mag., pp. 0–0, 2020. [CrossRef]
- C. Kumar, X. Gao, and M. Liserre, “Smart Transformer Based Loop Power Controller in Radial Power Distribution Grid,” Proc. - 2018 IEEE PES Innov. Smart Grid Technol. Conf. Eur. ISGT-Europe 2018, 2018. [CrossRef]
- D. Das, V. M. Hrishikesan, C. Kumar, and M. Liserre, “Smart Transformer-Enabled Meshed Hybrid Distribution Grid,” IEEE Trans. Ind. Electron., vol. 68, no. 1, pp. 282–292, Jan. 2021. [CrossRef]
- R. Zhu, G. De Carne, M. Andresen, and M. Liserre, “Control of Smart Transformer in Different Electric Grid Configurations,” ICPE 2019 - ECCE Asia - 10th Int. Conf. Power Electron. - ECCE Asia, vol. 3, pp. 1668–1675, 2019.
- Singh, A. Maulik, and A. Maheshwari, “Probabilistic multi-objective energy management of a distribution system considering reactive power injection by voltage source converters,” Electr. Eng., vol. 105, no. 4, pp. 2107–2136, 2023. [CrossRef]
- H. Guo, F. Wang, J. Luo, and L. Zhang, “Review of energy routers applied for the energy internet integrating renewable energy,” in 2016 IEEE 8th International Power Electronics and Motion Control Conference, IPEMC-ECCE Asia 2016, Jul. 2016, pp. 1997–2003. [CrossRef]
- R. Mieth and Y. Dvorkin, “Data-Driven Distributionally Robust Optimal Power Flow for Distribution Systems,” IEEE Control Syst. Lett., vol. 2, no. 3, pp. 363–368, 2018. [CrossRef]
- H. Qiu et al., “Multi-interval-uncertainty constrained robust dispatch for AC/DC hybrid microgrids with dynamic energy storage degradation,” Appl. Energy, vol. 228, no. June, pp. 205–214, 2018. [CrossRef]
- Syed, V. Khadkikar, and H. H. Zeineldin, “Loss Reduction in Radial Distribution Networks Using a Solid-State Transformer,” IEEE Trans. Ind. Appl., vol. 54, no. 5, pp. 5474–5482, Sep. 2018. 2018. [CrossRef]
- G. De Carne, G. Buticchi, Z. Zou, and M. Liserre, “Reverse Power Flow Control in a ST-Fed Distribution Grid,” IEEE Trans. Smart Grid, vol. 9, no. 4, pp. 3811–3819, Jul. 2018. 2018. [CrossRef]
- T. Ding et al., “Duality-Free Decomposition Based Data-Driven Stochastic Security-Constrained Unit Commitment,” IEEE Trans. Sustain. Energy, vol. 10, no. 1, pp. 82–93, 2019. [CrossRef]
- Z. Zhang, Y. Chen, J. Ma, X. Liu, and W. Wang, “Two-Stage Robust Security Constrained Unit Commitment Considering the Spatiotemporal Correlation of Uncertainty Prediction Error,” IEEE Access, vol. 7, pp. 22891–22901, 2019. [CrossRef]
- C. Ning and F. You, “Data-driven adaptive robust unit commitment under wind power uncertainty: A Bayesian nonparametric approach,” IEEE Trans. Power Syst., vol. 34, no. 3, pp. 2409–2418, 2019. [CrossRef]
- Z. Zhang, Y. Chen, X. Liu, and W. Wang, “Two-Stage Robust Security-Constrained Unit Commitment Model Considering Time Autocorrelation of Wind/Load Prediction Error and Outage Contingency Probability of Units,” IEEE Access, vol. 7, pp. 25398–25408, 2019. 5408; 2019. [CrossRef]
- H. Qiu, W. Gu, Y. Xu, Z. Wu, S. Zhou, and J. Wang, “Interval-Partitioned Uncertainty Constrained Robust Dispatch for AC/DC Hybrid Microgrids with Uncontrollable Renewable Generators,” IEEE Trans. Smart Grid, vol. 10, no. 4, pp. 4603–4614, 2019. [CrossRef]
- S. Yuan, C. Dai, A. Guo, and W. Chen, “A novel multi-objective robust optimization model for unit commitment considering peak load regulation ability and temporal correlation of wind powers,” Electr. Power Syst. Res., vol. 169, no. January, pp. 115–123, 2019. [CrossRef]
- T. Wu, K. Xie, B. Hu, H. Lu, J. Ding, and W. Shen, “Data-Driven Approach based Tri-Level Generation and Transmission Expansion Planning Model with High Wind Penetration,” iSPEC 2019 - 2019 IEEE Sustain. Power Energy Conf. Grid Mod. Energy Revolution, Proc., pp. 1858–1863, 2019. [CrossRef]
- S. Dehghan, A. Nakiganda, and P. Aristidou, “A data-driven two-stage distributionally robust planning tool for sustainable Microgrids,” IEEE Power Energy Soc. Gen. Meet., vol. 2020-Augus, 2020. [CrossRef]
- L. Wang, C. Jiang, K. Gong, R. Si, H. Shao, and W. Liu, “Data-driven distributionally robust economic dispatch for distribution network with multiple microgrids,” IET Gener. Transm. Distrib., vol. 14, no. 24, pp. 5816–5822, 2020. [CrossRef]
- H. Gao, R. Wang, Y. Liu, L. Wang, Y. Xiang, and J. Liu, “Data-driven distributionally robust joint planning of distributed energy resources in active distribution network,” IET Gener. Transm. Distrib., vol. 14, no. 9, pp. 1653–1662, 2020. [CrossRef]
- C. Kumar, R. Manojkumar, S. Ganguly, and M. Liserre, “Power Loss Minimization in Smart Transformer Based Meshed Hybrid Distribution Network,” in IECON Proceedings (Industrial Electronics Conference), Oct. 2020, vol. 2020-Octob, pp. 1670–1675. [CrossRef]
- L. Le et al., “Data-driven stochastic unit commitment considering commercial air conditioning aggregators to provide multi-function demand response,” Int. J. Electr. Power Energy Syst., vol. 129, no. January, p. 106790, 2021. [CrossRef]
- C. Zhang, L. Liu, H. Cheng, D. Liu, J. Zhang, and G. Li, “Data-driven distributionally robust transmission expansion planning considering contingency-constrained generation reserve optimization,” Int. J. Electr. Power Energy Syst., vol. 131, no. January, p. 106973, 2021. [CrossRef]
- C. Wang, Z. Gong, C. He, H. Gao, and T. Bi, “Data-Driven Adjustable Robust Unit Commitment of Integrated Electric-Heat Systems,” IEEE Trans. Power Syst., vol. 36, no. 2, pp. 1385–1398, 2021. [CrossRef]
- H. V M and C. Kumar, “Operation of Meshed Hybrid Microgrid During Adverse Grid Conditions with Storage Integrated Smart Transformer,” IEEE Open J. Ind. Electron. Soc., pp. 1–1, 2021. [CrossRef]
- C. Kumar, R. Manojkumar, S. Ganguly, and M. Liserre, “Impact of Optimal Control of Distributed Generation Converters in Smart Transformer Based Meshed Hybrid Distribution Network,” IEEE Access, vol. 9, pp. 140268–140280, 2021. [CrossRef]
- H. V M, C. Kumar, and M. Liserre, “An MVDC Based Meshed Hybrid Microgrid Enabled Using Smart Transformers,” IEEE Trans. Ind. Electron., vol. 0046, no. c, pp. 1–1, 2021. [CrossRef]
- D. Das, R. Manojkumar, C. Kumar, and S. Ganguly, “Optimal Power Management for Islanded Operation of ST-based Meshed Hybrid LV Microgrid,” in 2021 IEEE 12th Energy Conversion Congress & Exposition - Asia (ECCE-Asia), May 2021, pp. 183–188. 20 May. [CrossRef]
- C. Kumar, R. Manojkumar, and S. Ganguly, “Optimal Placement of Smart Transformer Low Voltage Converter in Meshed Hybrid Distribution Network,” in 2021 IEEE 12th Energy Conversion Congress & Exposition - Asia (ECCE-Asia), May 2021, pp. 1795–1800. [CrossRef]
- M. O. De Lara Filho, R. S. Pinto, A. C. De Campos, C. U. Vila, and F. H. Tabarro, “Day-ahead robust operation planning of microgrids under uncertainties considering DERs and demand response,” in 2021 IEEE PES Innovative Smart Grid Technologies Conference - Latin America, ISGT Latin America 2021, Sep. 2021, pp. 1–5. [CrossRef]
- Y. Zhang, Y. Liu, S. Shu, F. Zheng, and Z. Huang, “A data-driven distributionally robust optimization model for multi-energy coupled system considering the temporal-spatial correlation and distribution uncertainty of renewable energy sources,” Energy, vol. 216, p. 119171, 2021. [CrossRef]
- M. R. Feizi, M. E. Khodayar, and J. Li, “Data-driven distributionally robust unbalanced operation of distribution networks with high penetration of photovoltaic generation and electric vehicles,” Electr. Power Syst. Res., vol. 210, no. June 2021, p. 108001, 2022. [CrossRef]
- S. Gupta, A. Maulik, D. Das, and A. Singh, “Coordinated stochastic optimal energy management of grid-connected microgrids considering demand response, plug-in hybrid electric vehicles, and smart transformers,” Renew. Sustain. Energy Rev., vol. 155, no. October 2021, p. 111861, 2022. [CrossRef]
- Z. Huang, Y. Zhang, and S. Xie, “Data-adaptive robust coordinated optimization of dynamic active and reactive power flow in active distribution networks,” Renew. Energy, vol. 188, pp. 164–183, 2022. [CrossRef]
- D. Das and C. Kumar, “Partial Startup Scheme for Smart Transformer in Meshed Hybrid Islanded Grid Operation,” IEEE Trans. Ind. Appl., vol. 58, no. 1, pp. 142–151, 2022. [CrossRef]
- Singh and A. Maulik, “Energy Management of an Active Distribution Network Considering Correlation Between Uncertain Input Variables,” Arab. J. Sci. Eng., vol. 48, no. 5, pp. 6377–6398, 2023. [CrossRef]
- Z. Shi, T. Zhang, Y. Liu, Y. Feng, R. Wang, and S. Huang, “Optimal design and operation of islanded multi-microgrid system with distributionally robust optimization,” Electr. Power Syst. Res., vol. 221, no. April, p. 109437, 2023. [CrossRef]
- X. Wang, W. Yang, and D. Liang, “Multi-Objective Robust Optimization of Hybrid AC/DC Distribution Networks Considering Flexible Interconnection Devices,” IEEE Access, vol. 9, pp. 166048–166057, 2021. [CrossRef]
- S. K. Rangu, P. R. Lolla, K. R. Dhenuvakonda, and A. R. Singh, “Recent trends in power management strategies for optimal operation of distributed energy resources in microgrids: A comprehensive review,” Int. J. Energy Res., vol. 44, no. 13, pp. 9889–9911, 2020. [CrossRef]
- H. Qiu, W. Gu, P. Liu, Q. Sun, Z. Wu, and X. Lu, “Application of two-stage robust optimization theory in power system scheduling under uncertainties: A review and perspective,” Energy, vol. 251, 2022. [CrossRef]
- Yang and C. Su, “Robust optimization of microgrid based on renewable distributed power generation and load demand uncertainty,” Energy, vol. 223, p. 120043, 2021. [CrossRef]
- S. Claeys, M. Vanin, F. Geth, and G. Deconinck, “Applications of optimization models for electricity distribution networks,” Wiley Interdiscip. Rev. Energy Environ., vol. 10, no. 5, pp. 1–35, 2021. [CrossRef]
- Y. Zhang, J. Le, F. Zheng, Y. Zhang, and K. Liu, “Two-stage distributionally robust coordinated scheduling for gas-electricity integrated energy system considering wind power uncertainty and reserve capacity configuration,” Renew. Energy, vol. 135, pp. 122–135, 2019. [CrossRef]
- C. Zhao and Y. Guan, “Data-Driven Stochastic Unit Commitment for Integrating Wind Generation,” IEEE Trans. Power Syst., vol. 31, no. 4, pp. 2587–2596, Jul. 2016. [CrossRef]
- P. Li et al., “A Two-Stage Distributionally Robust Optimization Model for Wind Farms and Storage Units Jointly Operated Power Systems,” IEEE Access, vol. 9, pp. 111132–111142, 2021. [CrossRef]
- R. S. Pinto, C. Unsihuay-Vila, and F. H. Tabarro, “Coordinated operation and expansion planning for multiple microgrids and active distribution networks under uncertainties,” Appl. Energy, vol. 297, Sep. 2021. [CrossRef]
- B. Zeng and L. Zhao, “Solving two-stage robust optimization problems using a column-and- constraint generation method,” Oper. Res. Lett., vol. 41, no. 5, pp. 2013. [CrossRef]
- M. Paredes, L. S. A. Martins, S. Soares, and H. Ye, “Benders’ decomposition of the unit commitment problem with semidefinite relaxation of AC power flow constraints,” Electr. Power Syst. Res., vol. 192, p. 106965, Mar. 2021. [CrossRef]
- Q. Zhao, J. García-González, O. Gomis-Bellmunt, E. Prieto-Araujo, and F. M. Echavarren, “Impact of converter losses on the optimal power flow solution of hybrid networks based on VSC-MTDC,” Electr. Power Syst. Res., vol. 151, no. September 2017, pp. 395–403, 2017. [CrossRef]
- F. Mohammadi, G.-A. Nazri, and M. Saif, “An Improved Mixed AC/DC Power Flow Algorithm in Hybrid AC/DC Grids with MT-HVDC Systems,” Appl. Sci., vol. 10, no. 1, p. 297, Dec. 2019. [CrossRef]
- F. J. Lachovicz, T. S. P. Fernandes, and J. A. Vilela Junior, “Impacts of PV-STATCOM Reactive Power Dispatch in the Allocation of Capacitors Bank and Voltage Regulators on Active Distribution Networks,” J. Control. Autom. Electr. Syst., vol. 34, no. 4, pp. 796–807, Aug. 2023. [CrossRef]
- R. B. Jeyapradha and V. Rajini, “Investigations on Service Extensions of Solid State Transformer,” May 2019. [CrossRef]
- V. N. Jakka et al., “Protection design considerations of a 10 kV SiC MOSFET enabled mobile utilities support equipment based solid state transformer (muse-SST),” in Proceedings: IECON 2018 - 44th Annual Conference of the IEEE Industrial Electronics Society, Dec. 2018, pp. 5559. [CrossRef]
- R. Zhu et al., “Smart transformer/large flexible transformer,” CES Trans. Electr. Mach. Syst., vol. 4, no. 4, pp. 264–274, 2021. [CrossRef]
- R. Zhu, G. Buticchi, and M. Liserre, “Investigation on Common-Mode Voltage Suppression in Smart Transformer-Fed Distributed Hybrid Grids,” IEEE Trans. Power Electron., vol. 33, no. 10, pp. 8438–8448, 2018. [CrossRef]
- González-Castellanos, D. Pozo, and A. Bischi, “Distribution System Operation with Energy Storage and Renewable Generation Uncertainty,” in Handbook of Optimization in Electric Power Distribution Systems, M. Resener, S. Rebennack, P. M. Pardalos, and S. Haffner, Eds. Cham: Springer International Publishing, 2020, pp. 69–120.
- R. Silva Pinto, “Computational models for expansion planning of electric power distribution systems containing multiple microgrids and distributed energy resources under uncertainties,” Universidade Federal do Paraná, 2022.
- D. E. Bernal, Q. Chen, F. Gong, and I. E. Grossmann, “Mixed-Integer Nonlinear Decomposition Toolbox for Pyomo (MindtPy),” Comput. Aided Chem. Eng., vol. 44, pp. 895–900, 2018. [CrossRef]
- XM, “Curva de demanda promedio en Colombia,” www.xm.com.co, 2019. https://www.xm.com.co/Paginas/Consumo/historico-de-demanda.aspx.
- SolarCast, “Historical and TMY,” Time Series, 2022. https://toolkit.solcast.com.au/historical.
- Strunz, C. Abbey, C. Andrieu, R. C. Campbell, and R. Fletcher, “Benchmark Systems for Network Integration of Renewable and Distributed Energy Resources - TF C6.04.02,” 2014.
- Zhang et al., “A systematic approach for the joint dispatch of energy and reserve incorporating demand response,” Appl. Energy, vol. 230, no. September, pp. 1279–1291, 2018. [CrossRef]
- Goerigk and M. Khosravi, “Optimal scenario reduction for one- and two-stage robust optimization with discrete uncertainty in the objective,” Eur. J. Oper. Res., vol. 310, no. 2, pp. 529–551, 2023. [CrossRef]
Figure 1.
Equivalent VSC power flow model.
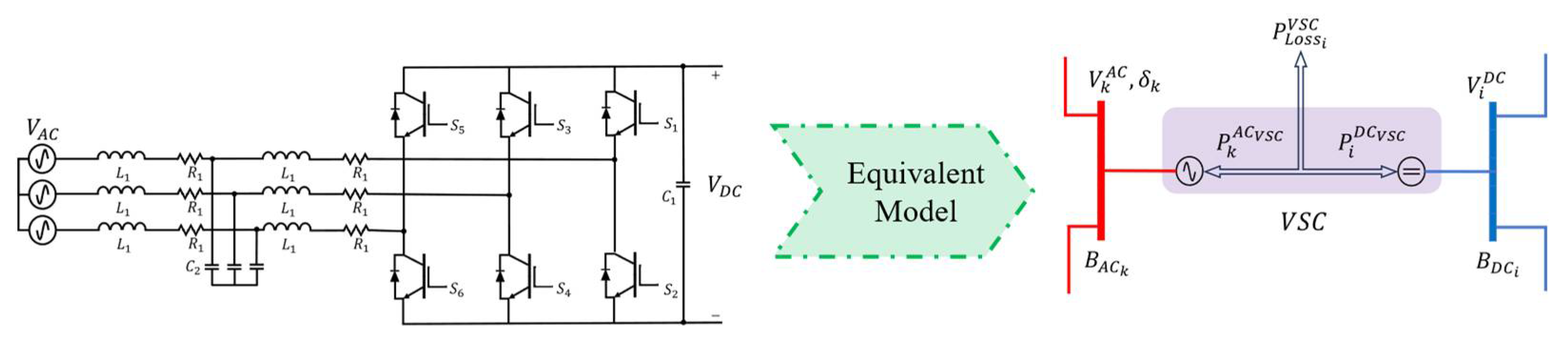
Figure 2.
a) The Operating region of the VSC coupled to the PVG; b) The Operating region of the VSC coupled to the BESS.
Figure 2.
a) The Operating region of the VSC coupled to the PVG; b) The Operating region of the VSC coupled to the BESS.
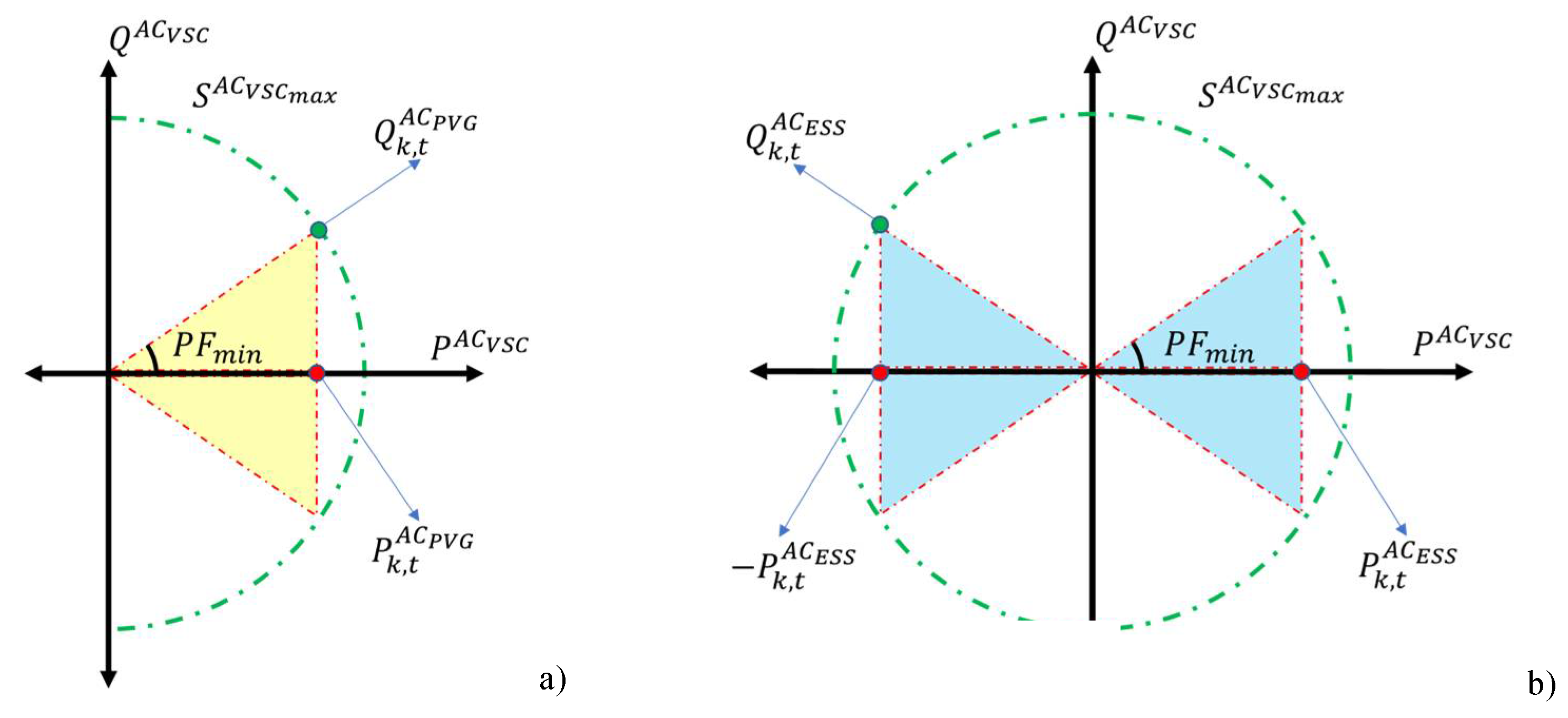
Figure 3.
The basic structure of a three-stage ST.
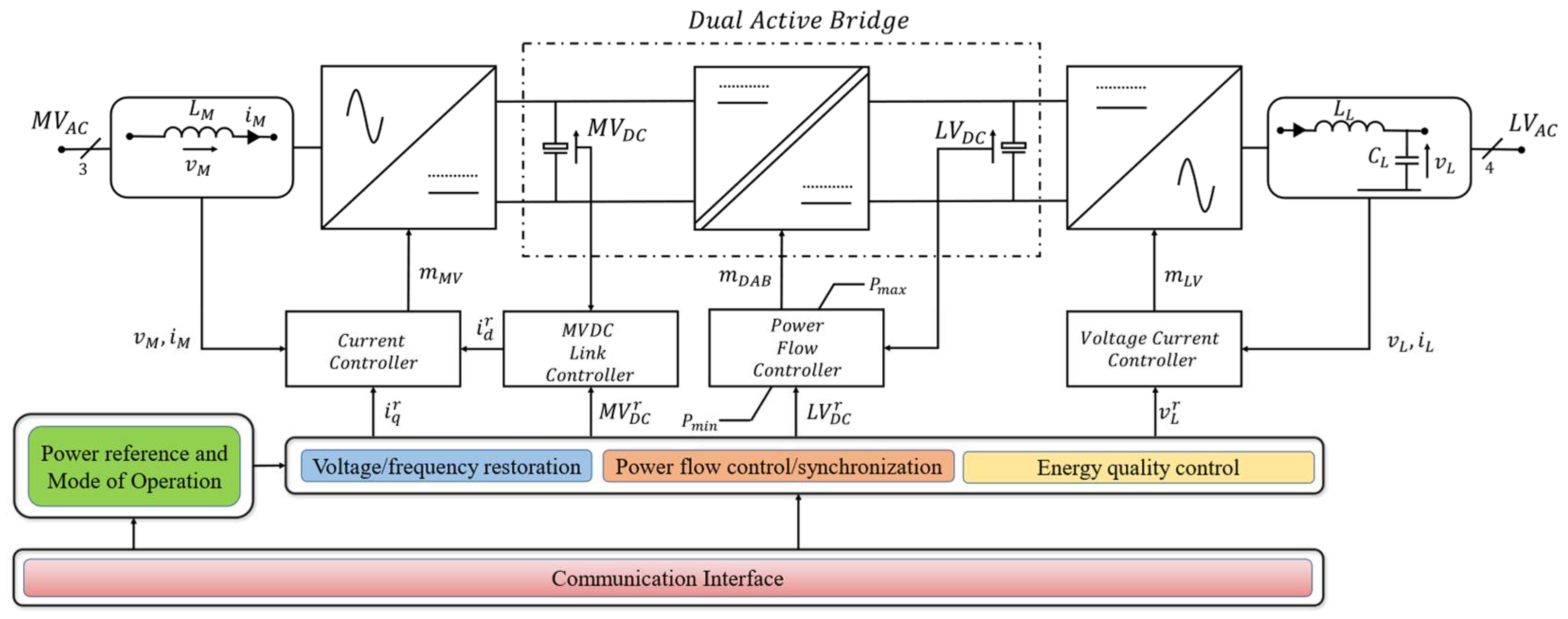
Figure 4.
ST equivalent power flow model.
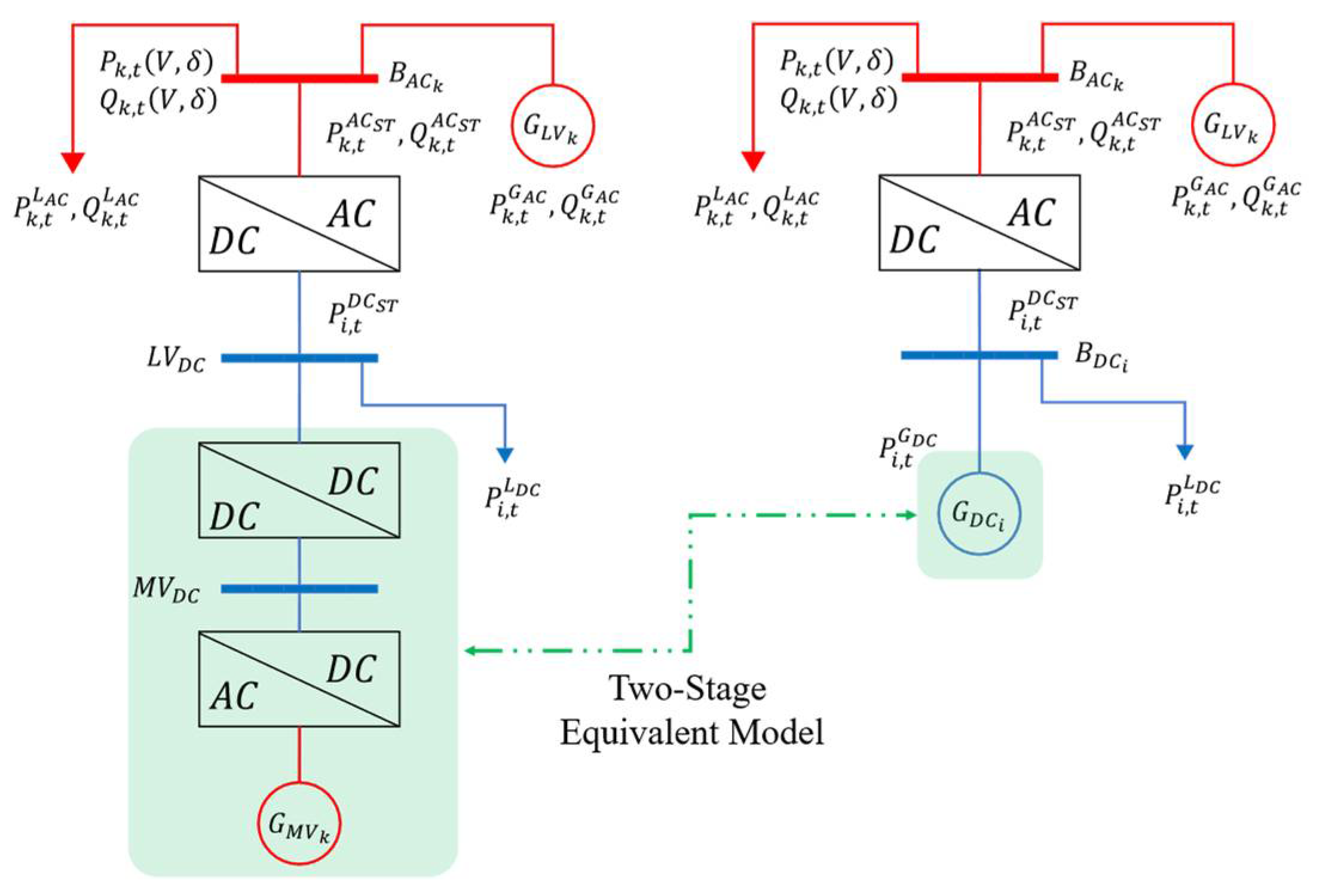
Figure 5.
Solution methodology for Day-Ahead Operation Planning of a ST-based MHM under uncertainties.
Figure 5.
Solution methodology for Day-Ahead Operation Planning of a ST-based MHM under uncertainties.
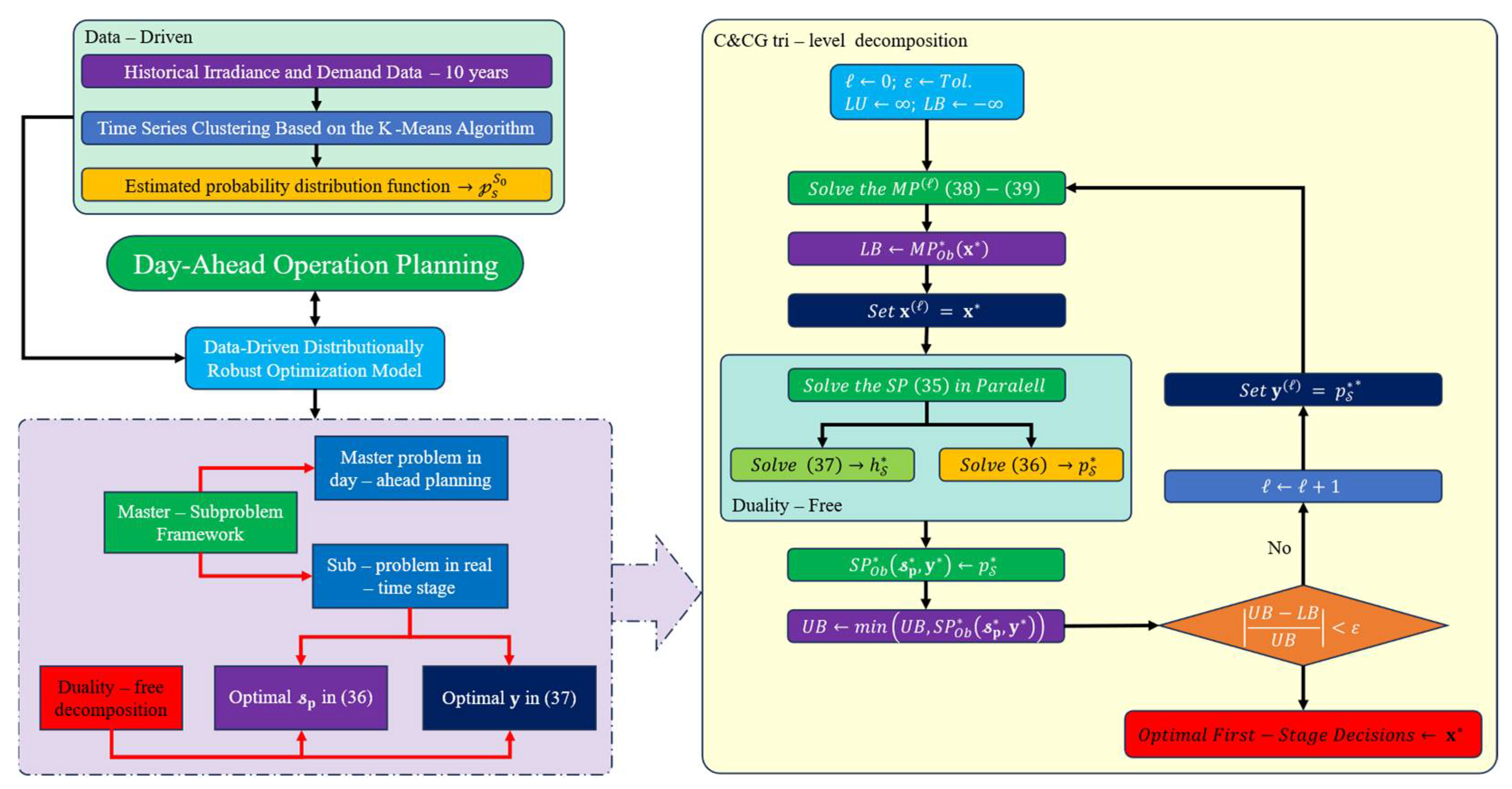
Figure 6.
Benchmark Test-System ST-based MHM his is a figure.
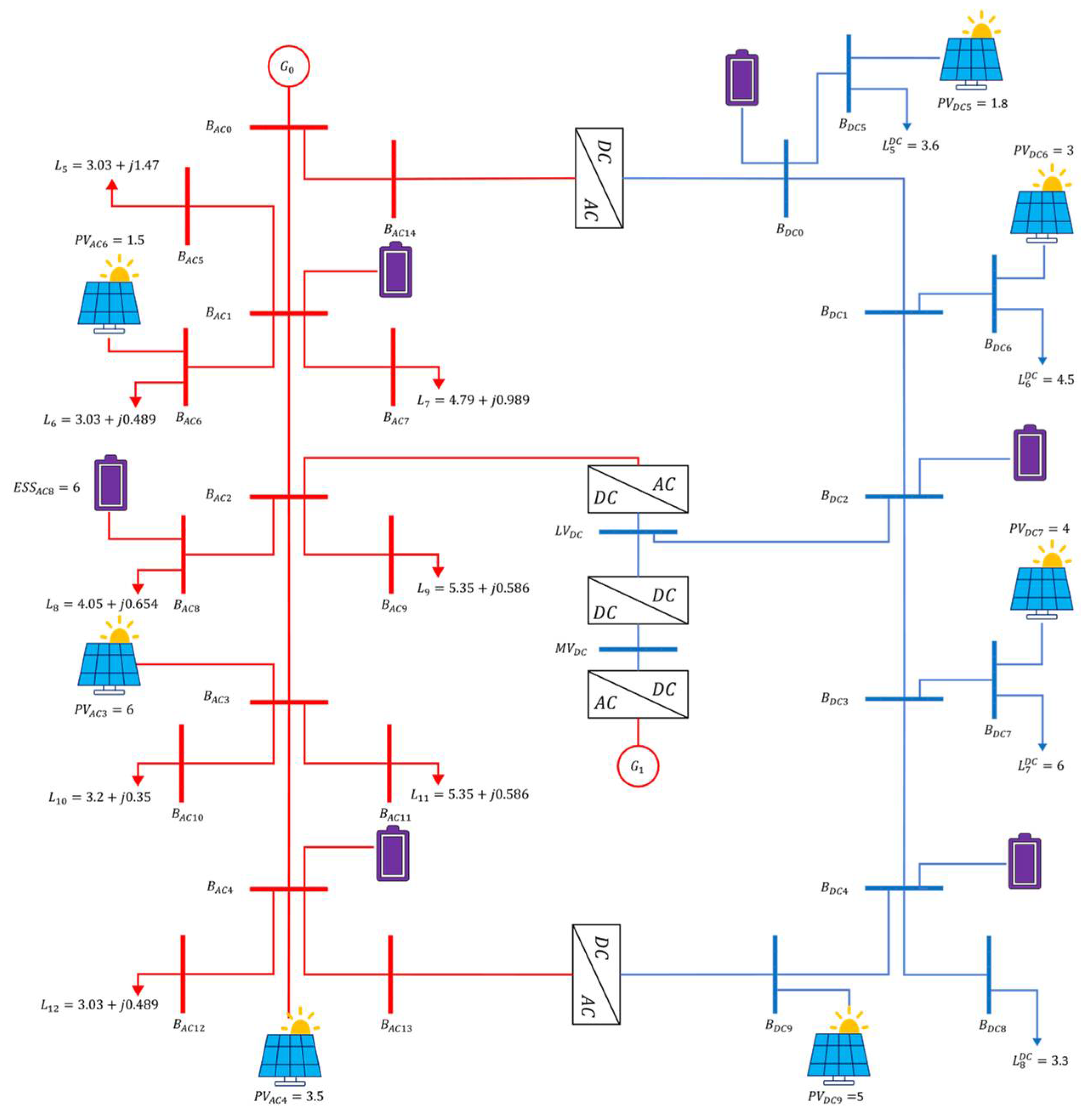
Figure 7.
Cluster of Six Data Bins using K - means.
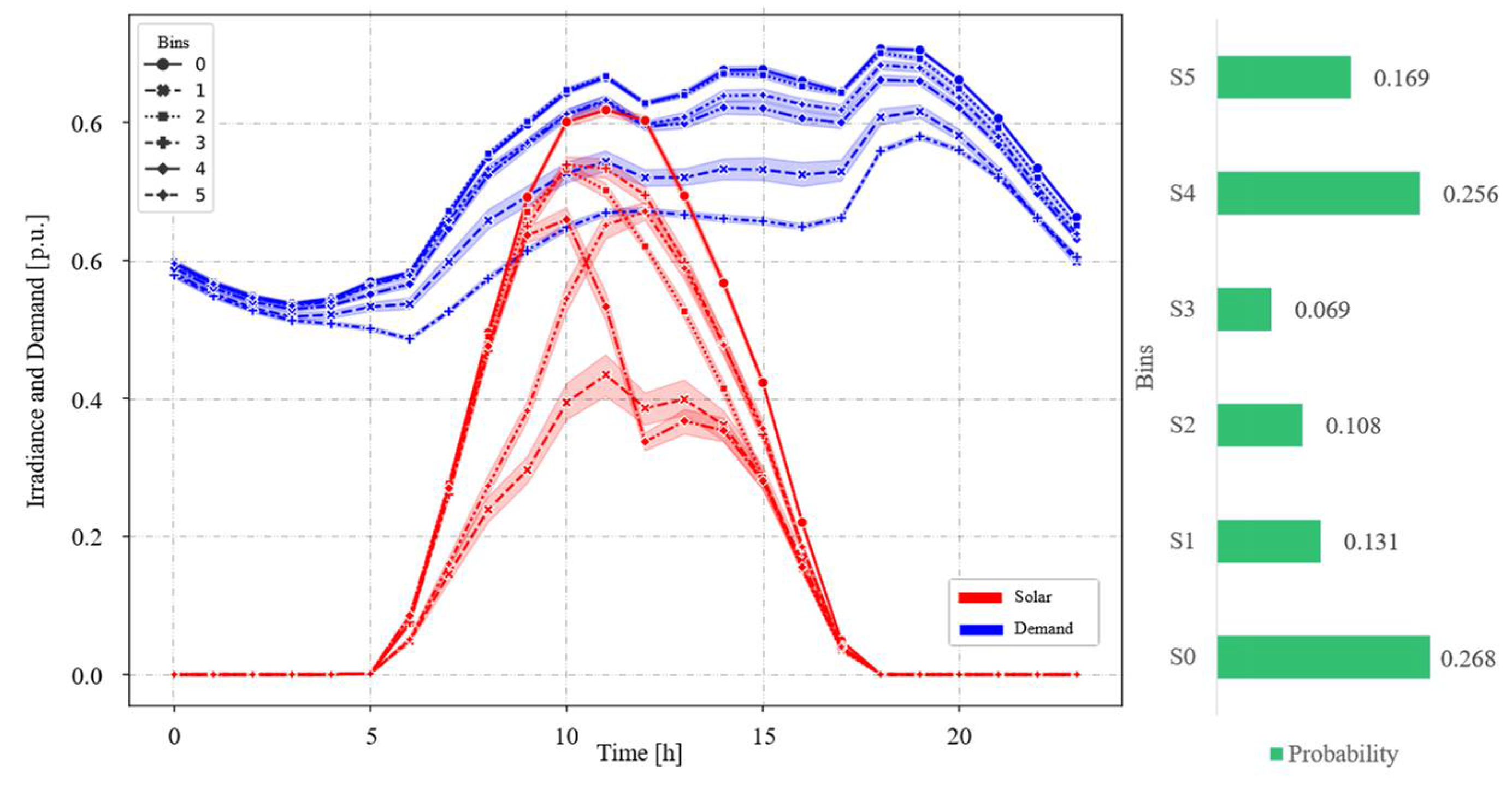
Figure 8.
Active power dispatch AC feeder, VSCs, AC PVGs, and the charge and discharge BESS in Case I (a) and Case II (b).
Figure 8.
Active power dispatch AC feeder, VSCs, AC PVGs, and the charge and discharge BESS in Case I (a) and Case II (b).
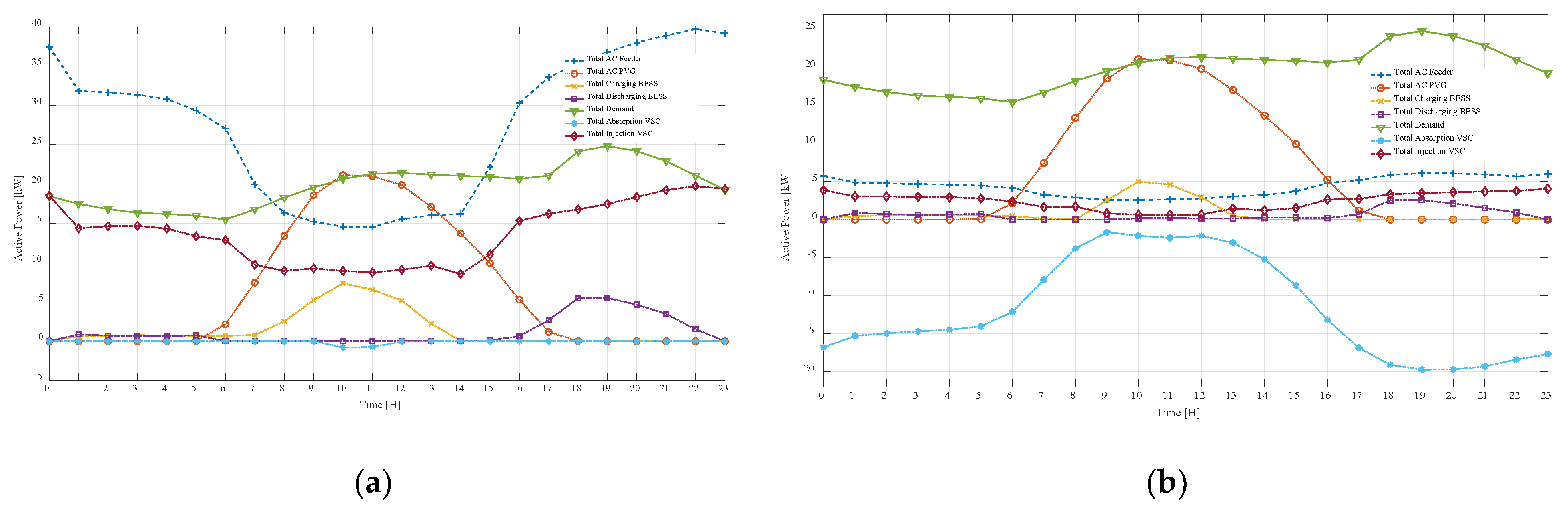
Figure 9.
Reactive power dispatch AC feeder, VSCs, AC PVGs, and the charge and discharge BESS in Case I (a) and Case II (b).
Figure 9.
Reactive power dispatch AC feeder, VSCs, AC PVGs, and the charge and discharge BESS in Case I (a) and Case II (b).
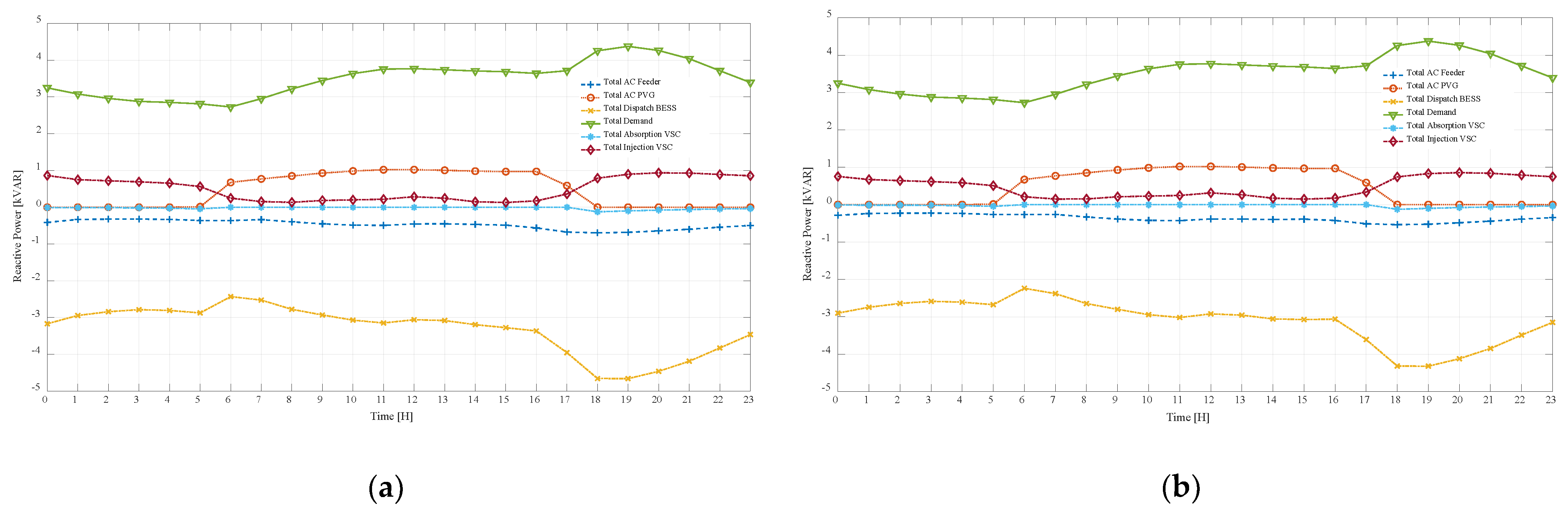
Figure 10.
Active power dispatch DC feeder, VSCs, DC PVGs and BESS in Case I (a) and Case II (b).
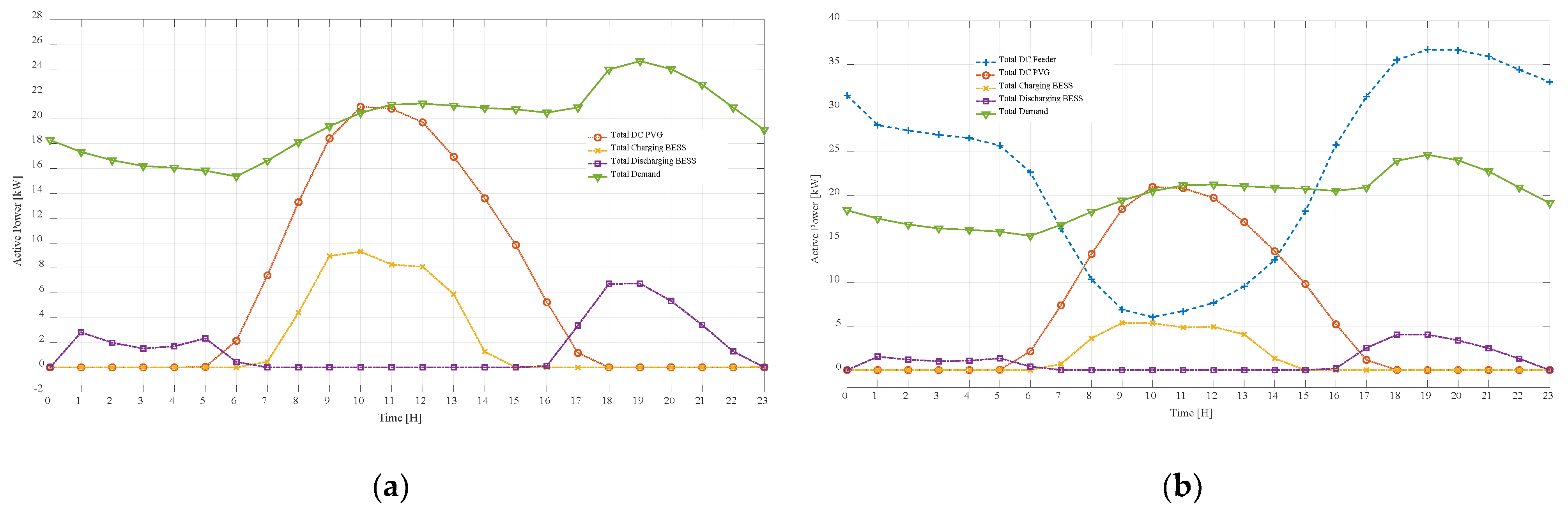
Figure 11.
Voltage profiles on the AC (a) and DC (b) side in Case I.
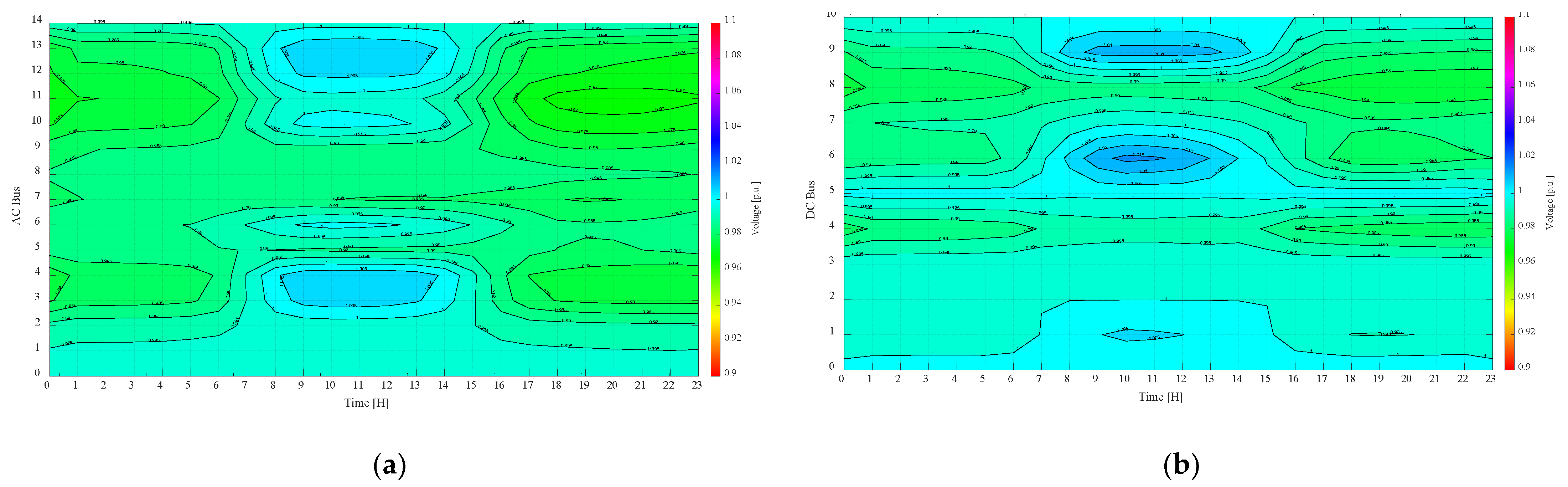
Figure 12.
Voltage profiles on the AC (a) and DC (b) side in Case II.
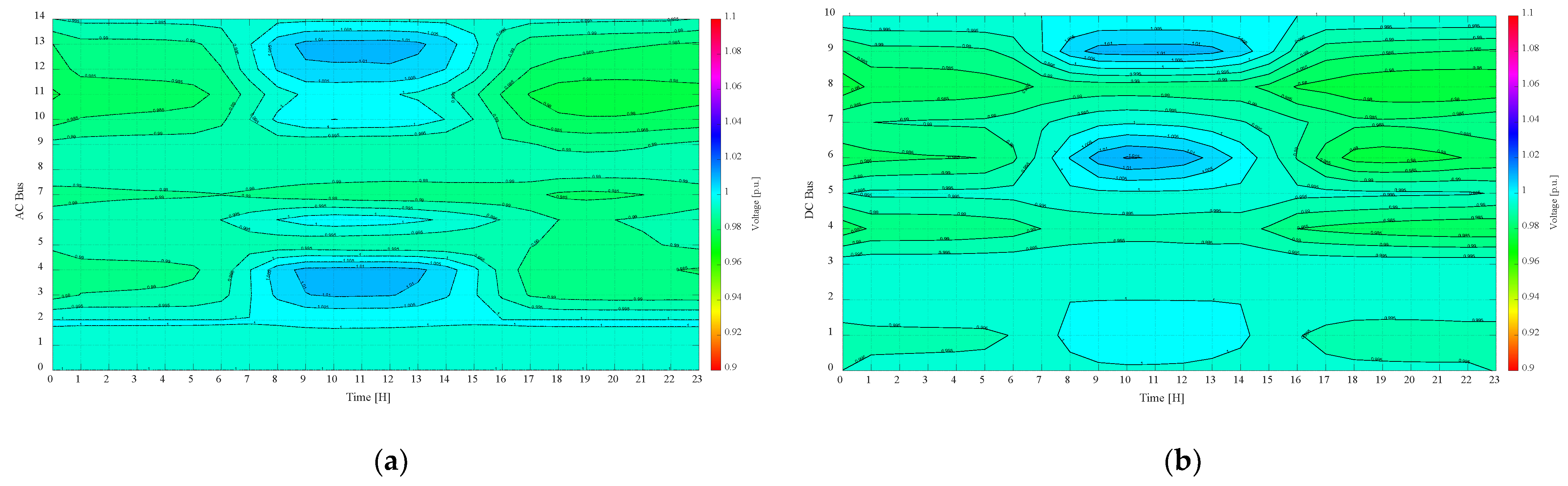
Figure 13.
Effects of the size of historical data on the Objective Function Value.
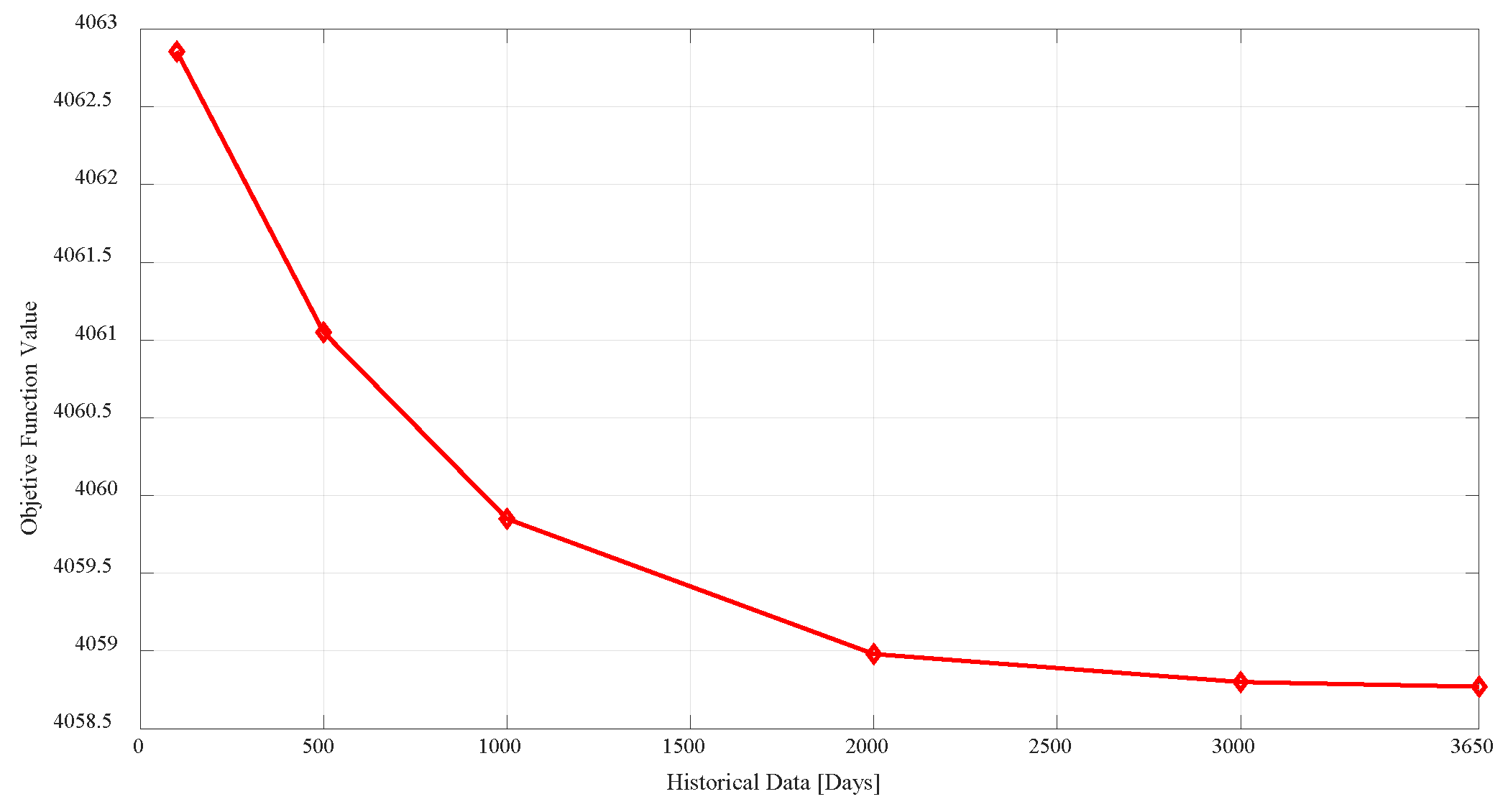
Table 2.
Total Active and Reactive Power at the main MHM’s elements.
| Cases | |||||||||
| Case I | 661.84 | -11.35 | 0 | 34.21 | 27.64 | 46.69 | 37.82 | 11.45 | -79.50 |
| Case II | 105.58 | -8.75 | 552.36 | 18.89 | 15.30 | 30.30 | 24.54 | 10.60 | -74.12 |
Table 3.
Objective Function.
| Case | Operation Cost [$/kW] |
Losses [kW] |
Deviation Voltage AC [p.u.] |
Deviation Voltage DC [p.u.] |
BESS’s Cost [$/kW] |
| Case I | 66184.54 | 14.26 | 0.07031 | 0.02327 | 15.49334 |
| Case II | 65795.18 | 10.37 | 0.03279 | 0.02527 | 8.76482 |
Table 4.
Effects of the size of historical data on BESS cost.
| Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | Test 6 | |
| Size sample [days] | 100 | 500 | 1000 | 2000 | 3000 | 3650 |
| Objective Function | 4062.856 | 4061.05 | 4059.85 | 4058.98 | 4058.8 | 4058.77 |
Table 5.
Total cost in different confidence levels.
| 0.5 | 0.8 | 0.99 | |
| 0.5 | 4057.22 | 4058.40 | 4058.35 |
| 0.8 | 4057.21 | 4058.03 | 4058.55 |
| 0.99 | 4057.22 | 4058.40 | 4058.76 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



