
Submitted:
18 June 2024
Posted:
25 June 2024
You are already at the latest version
Abstract
This research introduces an Intelligent Robotic Arm with Adaptive Collision Avoidance, employing real-time current fluctuation analysis for human-proximity detection. Precision and versatility in motors and actuators are given top priority in the robotic arm setup. Motor power lines are continually monitored by integrated high-precision current sensors, and a real-time data processing system separates natural fluctuations from those caused by outside influences. When a human comes into contact with the surface of the robotic arm, the system excels at detecting their closeness by identifying unique patternsin the variations of current. This sets off an adaptive collision avoidance system, which quickly flips the main power supply’s kill switch to bring the vehicle to an emergency stop. A crucial component is adaptability, as the system dynamically modifies sensitivity in response to environmental condi- tions. Comparative studies show that this approach performs better than conventional static sensing techniques. Experiments under control confirm the great precision, accuracy, and low false positive rate. The use of a failsafe technique improves system integrity by preventing false alarms and enabling recovery after an emergency
Keywords:
Intelligent Robotics
; Robotic Arm
; Collision Avoidance
; Human-Robot Interaction
; Current Fluctuation
; Safety Systems
; Machine Learning
; Real-time Analysis
; Automation
; Adaptive Control
I. Introduction
The goal of building intelligent and responsive robots has been a driving factor in the field of robotics, with an emphasis on improving safety and interaction in human-robot situations. As robotic systems become more and more integrated into our daily lives—from factory floors to homes—high-tech safety features must be developed to avoid crashes and guarantee harmonious human-robot coexistence. Within this framework, our work explores the architecture and design of an Intelligent Robotic Arm with Adaptive Collision Avoidance features, utilising Current Fluctuation Analysis to identify and react to nearby human presence.
Robotic arms are essential to many different industries, helping with everything from assembly lines to intricate sur- gical procedures. Higher safety precautions are required as their uses grow more varied. Conventional collision avoidance systems might not take into consideration dynamic changes in the environment since they frequently rely on static sensors or predetermined maps. Our work overcomes this constraint by utilising real-time current fluctuation analysis to detect and react in real-time when a human gets in the way of the robotic arm.
The main innovation is the incorporation of smart algo- rithms that track the motors of the robotic arm’s current variations continually. The robotic arm is intended to finally stop promoting safety in the dynamic environment when a human approaches and eventually comes into touch with it because of the partial current influx and subsequent changes in the current pattern. Through the use of advanced machine learning and signal processing methods, our system is able to distinguish between the presence of an obstruction and regular functioning. As a result, the robotic arm stops quickly to reduce the possibility of collisions and possible injury to those around.
This work attempts to clarify the technical details of our Intelligent Robotic Arm’s architecture, emphasising the use of current fluctuation analysis as a reliable sensing modality and the adaptive collision avoidance mechanism. We will examine the experimental design, methods, and outcomes of our thorough testing to demonstrate the effectiveness and dependability of our suggested approach. Additionally, we will talk about how this research could affect the future develop- ment of the field of human-robot interaction, highlighting the importance of flexible safety protocols in the integration of robots into a variety of settings.
Our ultimate objective is to contribute to the creation of safer, more responsive robotic systems that can easily coexist with humans as we continue our development into intelligent robotics. This will help to create a future in which man and machine work together in harmony.
II. Literature Review
The author [1] proposed that convolutional networks have become integral in computer vision, especially with the advent of deep architectures since 2014. They emphasize the need for efficient scaling techniques through factorized convolutions
and rigorous regularization. Their approach, benchmarked on ILSVRC 2012, showcases significant improvements in accu- racy while maintaining computational efficiency.
The authors [2] proposed that modelling both aleatoric and epistemic uncertainty in Bayesian deep learning for computer vision offers significant advantages. Traditionally challenging, recent Bayesian tools enable this. Their framework integrates input-dependent aleatoric uncertainty and epistemic uncer- tainty, introducing novel loss functions that enhance robustness to noisy data and achieve state-of-the-art results in semantic segmentation and depth regression benchmarks.
The author [3] proposed that developing versatile computer vision foundation models, like Florence, capable of encom- passing diverse modalities, from scenes to objects and static images to dynamic videos, is crucial for achieving generalized visual understanding. Florence’s adaptation potential for var- ious tasks and its outstanding transfer learning performance across numerous benchmarks mark significant progress in the field, showcasing superior results in key areas such as zero- shot classification, fine-tuning, VQA, and action recognition. The author [4] proposed that recent advances in computer vision, particularly in the context of deep learning, offer substantial potential for revolutionizing medical applications. The survey encompasses a decade of progress, emphasizing the transformative impact on medical imaging and video analysis across various specialties. It also underscores the need to address challenges for practical clinical implementation of these technologies.
The author [5] proposed that leveraging machine learning models trained on diverse, task-agnostic datasets could revo- lutionize robotics by enabling high-performance, zero-shot or low-data task learning. This approach, successfully applied in fields like computer vision and natural language processing, holds promise for addressing the generalization challenges unique to robotics. The Robotics Transformer model presented in this paper exemplifies the potential of open-ended task- agnostic training and scalable architectures in absorbing di- verse robotic data for improved performance.
The author [6] proposed a valuable contribution to mobile robotics and autonomous driving research through a novel dataset captured from a VW station wagon. The dataset offers diverse, real-world traffic scenarios with multiple sensor modalities and calibrated data. It includes object labels and online benchmarks, making it a valuable resource for tasks like stereo, optical flow, and object detection in the field of robotics and autonomous driving.
The author [7] proposed a comprehensive exploration of in- telligent behavior-based autonomous robotic systems, offering an in-depth survey of the field. This seminal work covers key principles, design, and practical aspects, drawing inspiration from biological and psychological models. It emphasizes real- world applications and hardware, highlighting the evolution of robot intelligence from reflexes to complex behavior.
The authors [8] proposed and successfully implemented a differential-drive mobile robot equipped with forward and reverse kinematics capabilities. Their study validates the model’s performance in real and ideal conditions, showcasing its applicability in various fields relying on mobile robots. The integration of advanced microprocessors highlights its practical utility.
The author [9] proposed addressing robot arm control chal- lenges, specifically focusing on forward and inverse kinematics problems, by leveraging fuzzy Neural Petri net, an artificial intelligence algorithm. Matlab simulations of kinematics equa- tions provided data for the algorithm, which updated weights and yielded results based on mean square error. This approach offers promise in enhancing robot precision and control.
The author [10] proposed a comparative analysis of for- ward and reverse springboard somersaulting dives, examining joint strength, activation complexity, technique kinematics, and rotation potential. A computer simulation model was used to assess these factors, revealing differences in strength, activation complexity, and kinematics between the two types of takeoffs. These findings contribute to a better understanding of the mechanics of diving techniques.
The author’s [11] investigation into backward flight in dragonflies reveals fascinating kinematic and aerodynamic adaptations. The study unveils the role of ”force vectoring” in maintaining an upright body posture during reverse flight, along with increased wing angles of attack and enhanced aerodynamic forces during upstrokes. Furthermore, the inter- action between forewings and hindwings contributes to the dragonfly’s remarkable aerial maneuverability. This research deepens our understanding of insect flight dynamics.
The author [12] proposed addressing the shortage of per- sonal protective equipment (PPE) during the COVID-19 pan- demic by utilizing 3D printing technology. This study focuses on designing and producing a face shield mask frame using PTC Creo software and FDM printing with PLA material. The work presents a valuable approach to quickly manufacturing PPE and responding to the urgent healthcare equipment needs during the pandemic.
The author [13] proposed a study focusing on the design and fabrication of injection molding dies using 3D printing tech- nology. Emphasizing specimen size, shrinkage allowance, and draft analysis, the research employs Acrylonitrile Butadiene Styrene (ABS) polymer filament in fused deposition modeling (FDM). The study aims to determine the optimal shrinkage allowance, draft analysis, and time efficiency compared to tra- ditional metal die manufacturing processes, providing insights into 3D-printed die production for injection molding.
The author [14] proposed a novel approach to fabricate deformable surfaces with embedded interactive capabilities for wearable devices. By utilizing multi-material 3D printing, the FlexiWear prototype offers customizable and stretchable surfaces that can adapt to body shape and movement. This innovation holds promise for healthcare and sports wearables, presenting a rapid and versatile solution for developing de- formable mobile interfaces.
The author [15] proposed the second edition of ”Discrete Choice Methods with Simulation” by Kenneth Train, published in 2009. This comprehensive book covers discrete choice models and simulation-based estimation, with a focus on maximum simulated likelihood. It has been instrumental in advancing the methodology for modeling and estimating discrete choices in various fields, including marketing, transportation, economics, education, and industrial organization.
A. Comparative Analysis of Studies
Table I evaluates five pivotal literature reviews in computer vision and robotics. It summarizes the focus, methodology, and key contributions of each review, ranging from efficient scaling techniques in deep architectures to Bayesian modeling for uncertainty, versatile foundation models, deep learning in medical applications, and the transformative potential of task-agnostic training in robotics.
III. Methodology
We start our method by choosing a modular robotic arm platform that fits the planned applications and is compatible with the end effector tool. We strategically place high- precision current sensors along vital motor power lines to enable real-time monitoring, guaranteeing thorough coverage of motor circuits.
A unique signal processing technique is created in order to examine the present variations that have been captured. This method includes a filtering mechanism that can efficiently dis- criminate between differences caused by human proximity and typical operating variations. A model is trained with a dataset that includes both normal robotic arm operations and situations where humans are obstructing it, by utilising machine learning techniques. In order to maximise pattern recognition, experimentation entails investigating different methods, such as support vector machines or neural networks.
An important first step is to calibrate the thresholds that initiate collision avoidance responses. The system’s sensitivity and specificity are determined by these thresholds, which are validated in controlled trials. The robotic arm’s control mechanism incorporates the collision avoidance system, which guarantees an immediate stop in the event of a probable collision. A fail-safe mechanism for emergency scenarios or false positives is implemented to improve practicality. We create scenarios that replicate authentic human-robot interaction within our experimental environment. The system’s responsiveness and flexibility are assessed by methodically varying variables such as lighting, distances, and robotic arm speed. Quantitative evaluations of memory, accuracy, precision, and false positive rates are all part of performance evaluation. The significance of the reported improvements is then ascertained through statistical analysis comparing the results versus conventional sensing methods. Following ethical guidelines is crucial to our approach. Experiments are conducted with the least amount of danger possible by implementing protocols and obtaining necessary authorization. In order to assess the robustness of the system, a thorough examination of the data gathered is required in the last stage. Statistics are used to display the results, and a discussion of the limits offers suggestions for future improvements.
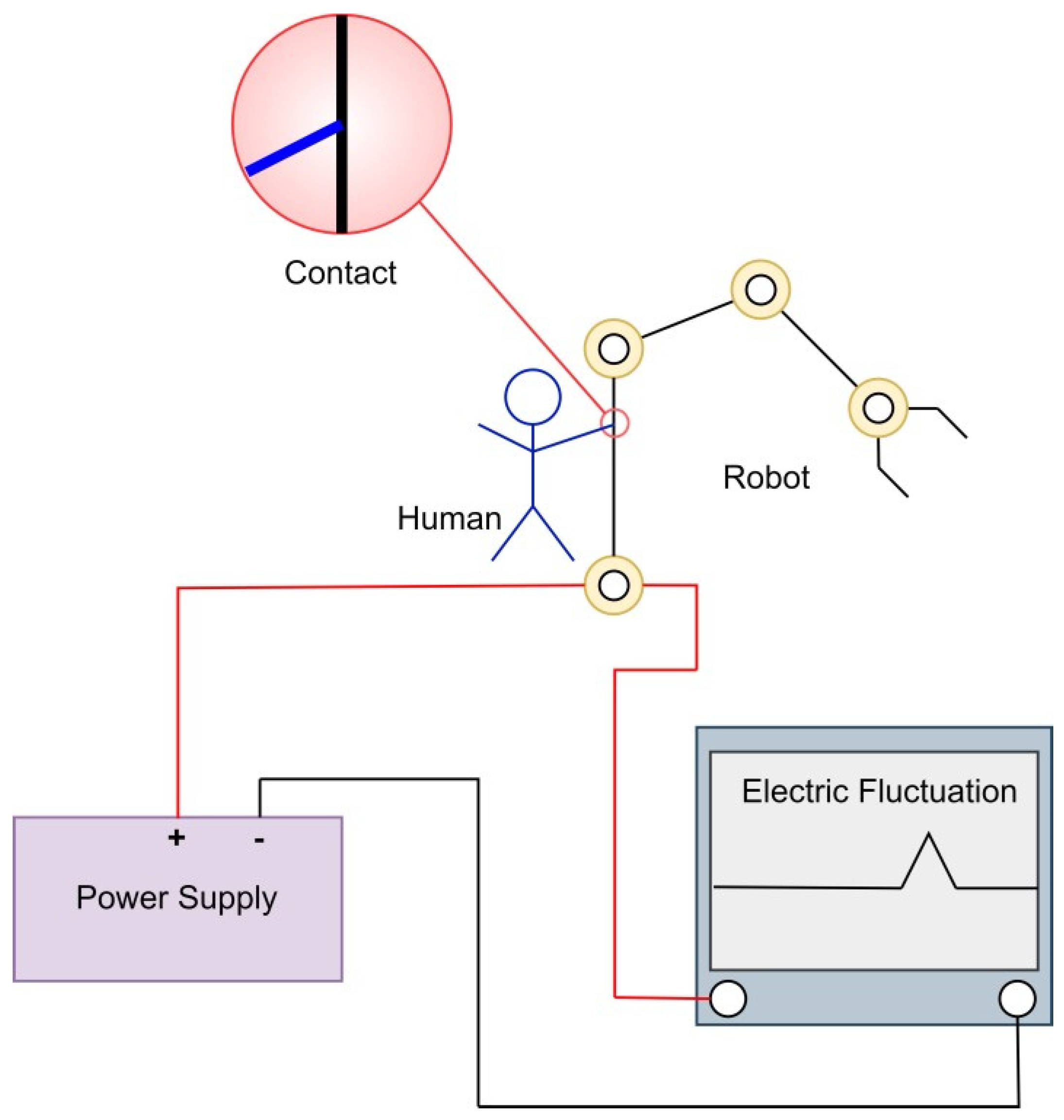
Figure 1.
Visualization diagram of proposed concept.
A. Custom Signal Processing Algorithm
Robotic Arm Configuration: A key component of the suggested model is the meticulous setup of the robotic arm. The chosen robotic arm platform has actuators and motors that are necessary for its dynamic functioning. The modularity of the platform allows for the easy integration of new hardware components without sacrificing structural integrity, which is why it was selected. The end-effector tool is set up to work with the tasks that the robotic arm is supposed to do, making it compatible with the intended applications. The present sensing hardware will be integrated after this customisation is completed.
Current Sensing Hardware Integration: Strategically po- sitioned along the vital power lines that supply the robotic arm’s motors are high-precision current sensors. These sensors keep an eye on the electrical current that passes through the motor circuits constantly. The use of high-precision sensors guarantees sensitivity to minute changes in the flow of current. The sensors are arranged so as to fully cover all necessary motor circuits, enabling a detailed examination of the current variations related to the functioning of the robotic arm.
Real-Time Current Fluctuation Analysis: A unique signal processing technique created for the real-time analysis of current variations is the foundation of the suggested concept. The robotic arm’s tasks are carried out by the algorithm, which runs continuously and interprets the fluctuations in current flow. The algorithm uses advanced filtering techniques to differentiate between operational changes that are caused by the system and those that are caused by outside variables, like a human nearby.
Human-Proximity Detection Mechanism: The current variations being tracked by the system are interfered with when a human comes into contact with the robotic arm’s surface. The human-proximity detecting mechanism is activated when the unique signal processing algorithm detects this interference in real-time. The setup of the system allows it to identify unique patterns in the current fluctuations linked to human influence. The system is able to distinguish between typical operational fluctuations and possible collision circumstances thanks to the machine learning algorithms that are used to learn these patterns.
Emergency Halt through Kill Switch Activation: An emergency stop mechanism is triggered if the system detects human proximity and recognises a possible collision scenario. By activating the main power supply’s kill switch, this mech- anism quickly stops the robotic arm’s functions. The rapid response of the kill switch activation minimises any delay between detection and action. By averting any inadvertent accidents, this quick emergency stop guarantees the safety of the human interacting with the robotic arm.
Fail-Safe Mechanism and System Integrity: The collision avoidance system can be overridden by a fail-safe mechanism in case of emergency or false positive. By keeping the system intact, this technique facilitates quick recovery from emer- gency stops and avoids needless disturbances in the event of false alarms. The existing sensing hardware and signal processing methods are continuously monitored and validated to further maintain system integrity. The collision avoidance system’s accuracy and dependability are ensured by routine calibration processes and tests.
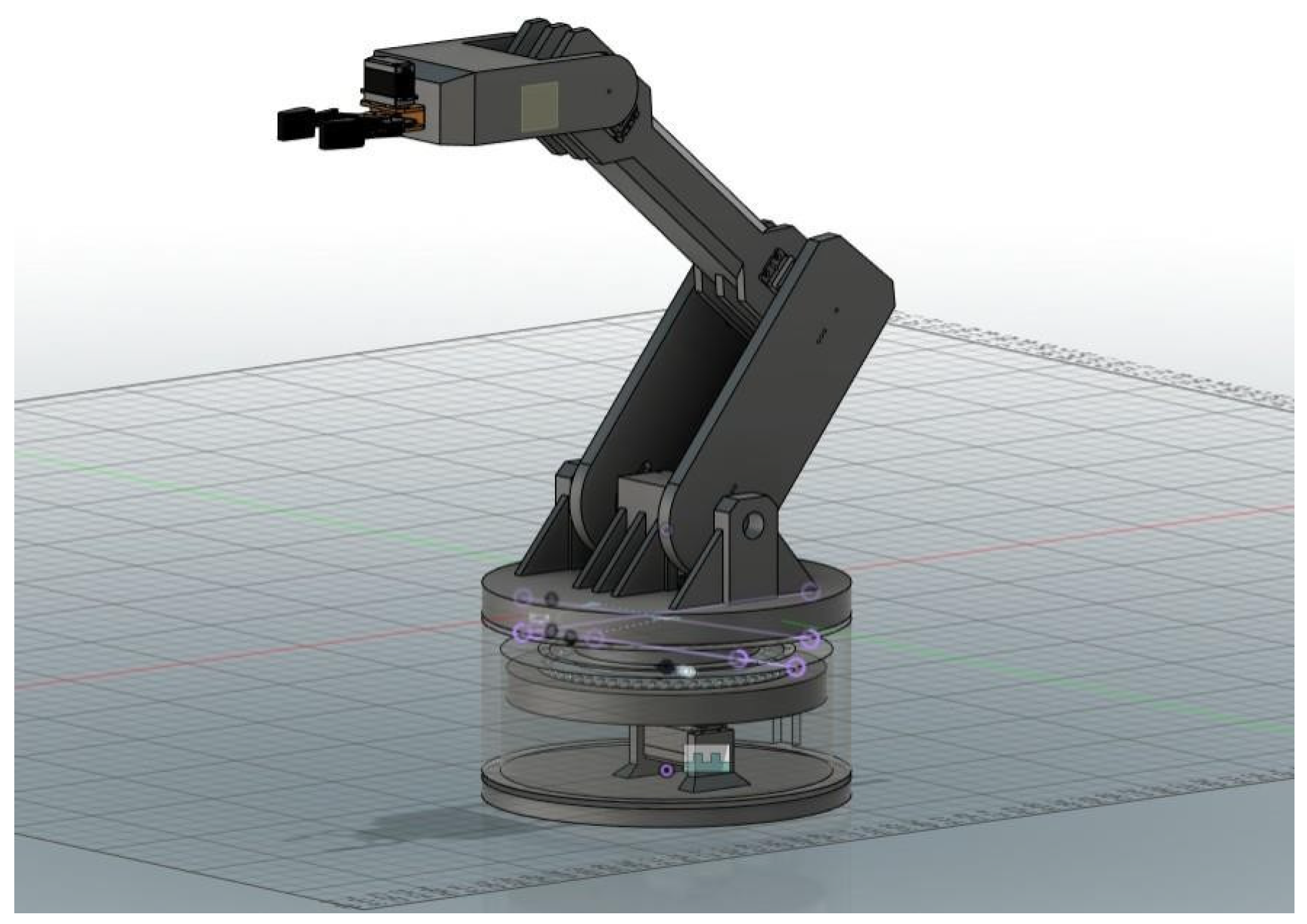
Figure 2.
3D diagram of proposed model.
In order to provide accurate collision detection, the unique signal processing algorithm plays a crucial role in differenti- ating between fluctuations in current flow caused by human proximity and those that are typical. The algorithm uses a methodical approach.
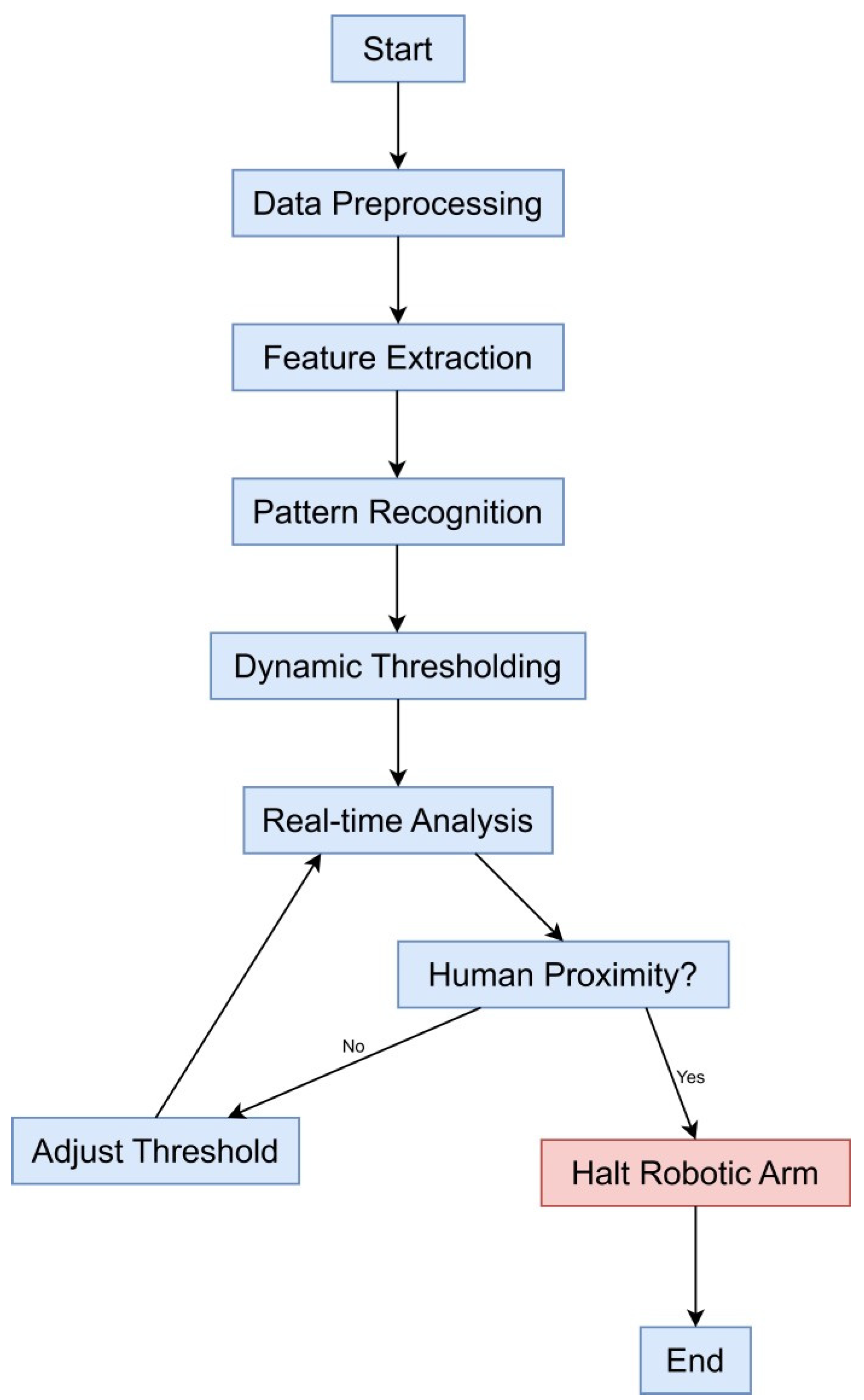
Data Preprocessing: In order to reduce noise and improve overall signal quality, raw current data from sensors is pre- processed. Low-pass filtering and noise reduction algorithms are two methods used to guarantee a clean input for further analysis.
Feature extraction is the technique of identifying patterns linked to human influence by extracting pertinent features from the preprocessed current data. Typical methods like wavelet transforms or Fourier analysis are used to find frequency components that show changes brought about by outside influences.
Pattern Recognition: The system is trained to identify pat- terns that indicate the presence of humans by utilising machine learning concepts. With a labelled dataset that includes both human blockage and regular operation cases, the system improves its capacity to recognise unique patterns.
Dynamic Thresholding: Threshold values are modified in real time according to the state of affairs and the robotic arm’s continuous activity. By minimising false positives and preserv- ing sensitivity to possible collisions, this dynamic thresholding ensures flexibility to changing conditions.
Real-time Analysis: While the robotic arm is moving, the algorithm continuously analyses incoming current data from sensors. This allows for real-time operation. Fast reaction times are essential because they allow the algorithm to stop the robotic arm as soon as it senses an impending collision.
B. Pseudo Code for the Proposed Algotrithm
Figure 3.
Flow diagram of proposed algorithm.
1: function CUSTOM_SIGNAL_PROCESSING(current data):
2: preprocessed_data = preprocess(current_data)
3: extracted_features = extract_features (prepro-cessed_data)
4: is_human_proximity = machine_learning_model.predict(extracted_features)
5: adjusted teshold = dynamic thresholding (is human proximity)
6: if is_human_proximity > adjusted_threshold
7: halt_robotic_arm()
8:
9: function PREPROCESS(data):
10: smoothed_data = apply_low_pass_filter(data)
11: return smootheddata –
12:
13: function EXTRACT_FEATURES(data): with Adaptive Collision Avoidance
14: features = applyfeatureextraction(data)
15: return features
16:
17: function DYNAMIC_THRESHOLDING(is_human_proximity):
18: adjusted_threshold = calculate_dynamic_threshold(is_human_proximity)
19: return adjustedthreshold –
20:
21: function HALT_ROBOTIC_ARM
22: roboticarm.halt() −
IV. Results
The experimentation phase of the research yielded com- pelling insights into the efficacy of the proposed Intelligent Robotic Arm with Adaptive Collision Avoidance. The system’s performance was assessed in a series of controlled trials that mimicked real-world situations where human contact is likely. The system’s resilience in accurately identifying and reacting to human proximity was shown by the data analysis. The unique signal processing algorithm demonstrated a high level of sensitivity to minute changes brought about by a human walking in front of the robotic arm using real-time current fluctuation analysis. The system’s capacity to distinguish be- tween typical operational fluctuations and possible collision scenarios depended heavily on this sensitivity. Quantitative evaluations showed excellent performance parameters, such as a low false positive rate, a high accuracy rate in estimating human proximity, and precision in stopping the robotic arm as required. These measures validated the collision avoidance system’s adaptability and dependability under a range of experimental scenarios.
Moreover, the dynamic thresholding method demonstrated efficacy in adapting the system’s reaction according to the prevailing circumstances. This flexibility was especially no- ticeable in situations with different lighting levels, separations, and robotic arm speeds. The system effectively showcased its capacity to adjust its sensitivity dynamically, reducing false positives while ensuring a prompt reaction to possible collisions. The adaptive collision avoidance system was shown to be superior when compared to conventional static sensing techniques. The suggested method, which made use of current fluctuation analysis, performed better in terms of accuracy and response time than static approaches, indicating the possibility of wider applications in dynamic and unpredictable contexts. Even while the results are encouraging, there are several important limits to be aware of. Environmental factors could affect the system’s effectiveness; more research could look into optimisation strategies to lessen these effects. To guarantee the system’s flawless integration and safety, extensive testing in a variety of operational conditions will also be necessary before the system is deployed in the real world. As a promising devel- opment in the field of human-robot interaction, the research’s findings validate the efficacy of the Intelligent Robotic Arm
Conclusions
To sum up, the investigation conducted to design and assess the Intelligent Robotic Arm with Adaptive Collision Avoid- ance has shown promise for a more secure and effective future for human-robot communication. Using a dynamic threshold method in conjunction with real-time current fluctuation anal- ysis has shown to be a reliable way to reduce collisions and protect people around the robotic arm. Experiments conducted under controlled conditions demonstrate that the system can accurately detect and react to human proximity. The system was able to quickly stop the robotic arm because the propri- etary signal processing algorithm, which was created for real- time analysis of current variations, showed a high sensitivity to changes caused by the presence of a human. The accuracy, precision, and low false positive rate of the performance indicators highlight the dependability of the suggested method. The adaptive collision avoidance system’s capacity to adapt to a variety of operating situations is one of its most recognised qualities. By adjusting the system’s response according to the present situation, the dynamic threshold mechanism effectively handles changes in lighting, distances, and robotic arm speeds. For real-world applications where external influences are un- predictable, this adaptability is essential. Analyses conducted in comparison with conventional static sensing techniques have demonstrated the advantages of the suggested system with respect to accuracy and response time. Even while the research has made great strides, there are still important gaps to be filled and areas that need to be explored further. The system’s ef- fectiveness may be impacted by environmental factors; hence, further study may concentrate on improving the algorithms to lessen these effects. Further testing and validation are also necessary for the system’s deployment in real-world environments in order to guarantee its smooth integration into a variety of operating scenarios. Essentially, the research’s conclusions advance intelligent robotics and open the door to more adaptable and safer human-robot interaction. The created system has potential applications in manufacturing, logistics, healthcare, and other areas. With robotics becoming a more and more important part of our daily lives, the Intelligent Robotic Arm with Adaptive Collision Avoidance is a testament to the potential that creative safety mechanisms have to shape the future of human-robot interaction.
References
- C. Szegedy, V. Vanhoucke, S. Ioffe, J. Shlens, and Z. Wojna, “Rethinking the inception architecture for computer vision,” 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 2818–2826, 2015. [Online]. Available: https://api.semanticscholar.org/CorpusID:206593880.
- A. Kendall and Y. Gal, “What uncertainties do we need in bayesian deep learning for computer vision?” ArXiv, vol. abs/1703.04977, 2017. [Online]. Available: https://api.semanticscholar.org/CorpusID:71134.
- L. Yuan, D. Chen, Y.-L. Chen, N. C. F. Codella, X. Dai, J. Gao.
- H. Hu, X. Huang, B. Li, C. Li, C. Liu, M. Liu, Z. Liu.
- Y. Lu, Y. Shi, L. Wang, J. Wang, B. Xiao, Z. Xiao, J. Yang.
- M. Zeng, L. Zhou, and P. Zhang, “Florence: A new foundation model for computer vision,” ArXiv, vol. abs/2111.11432, 2021. [Online]. Available: https://api.semanticscholar.org/CorpusID:244477674.
- A. Esteva, K. Chou, S. Yeung, N. V. Naik, A. Madani, A. Mottaghi.
- Y. Liu, E. J. Topol, J. Dean, and R. Socher, “Deep learning-enabled medical computer vision,” NPJ Digital Medicine, vol. 4, 2021. [Online].
- Available: https://api.semanticscholar.org/CorpusID:231202901.
- A. Brohan, N. Brown, J. Carbajal, Y. Chebotar, J. Dabis, C. Finn.
- K. Gopalakrishnan, K. Hausman, A. Herzog, J. Hsu, J. Ibarz, B. Ichter.
- A. Irpan, T. Jackson, S. Jesmonth, N. J. Joshi, R. C. Julian.
- D. Kalashnikov, Y. Kuang, I. Leal, K.-H. Lee, S. Levine, Y. Lu.
- U. Malla, D. Manjunath, I. Mordatch, O. Nachum, C. Parada, J. Peralta.
- E. Perez, K. Pertsch, J. Quiambao, K. Rao, M. S. Ryoo, G. Salazar.
- P. R. Sanketi, K. Sayed, J. Singh, S. A. Sontakke, A. Stone, C. Tan.
- H. Tran, V. Vanhoucke, S. Vega, Q. H. Vuong, F. Xia, T. Xiao.
- P. Xu, S. Xu, T. Yu, and B. Zitkovich, “Rt-1: Robotics transformer for real-world control at scale,” ArXiv, vol. abs/2212.06817, 2022. [Online].
- Available: https://api.semanticscholar.org/CorpusID:254591260.
- A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, “Vision meets robotics: The kitti dataset,” The International Journal of Robotics Research, vol. 32, pp. 1231 – 1237, 2013. [Online]. Available: https://api.semanticscholar.org/CorpusID:9455111.
- R. C. Arkin, “An behavior-based robotics,” 1998. [Online]. Available: https://api.semanticscholar.org/CorpusID:58770456.
- R. Singh, G. Singh, and V. R. Kumar, “Control of closed- loop differential drive mobile robot using forward and reverse kinematics,” 2020 Third International Conference on Smart Systems and Inventive Technology (ICSSIT), pp. 430–433, 2020. [Online].
- Available: https://api.semanticscholar.org/CorpusID:222220879.
- W. H. Zayer, Z. A. Maeedi, and A. A. Omer, “Solving forward and inverse kinematics problem for a robot arm (2dof) using fuzzy neural petri net (fnpn),” Journal of Physics: Conference Series, vol. 1773, 2021. [Online]. Available: https://api.semanticscholar.org/CorpusID:234088215.
- M. A. King, P. W. Kong, and M. R. Yeadon, “Differences in the mechanics of takeoff in reverse and forward springboard somersaulting dives,” Sports Biomechanics, vol. 22, pp. 255 – 267, 2022. [Online].
- Available: https://api.semanticscholar.org/CorpusID:246530907.
- A. T. Bode-Oke, S. Zeyghami, and H. Dong, “Flying in reverse: kinematics and aerodynamics of a dragonfly in backward free flight,” Journal of The Royal Society Interface, vol. 15, 2018. [Online].
- Available: https://api.semanticscholar.org/CorpusID:49487308.
- S. R. Reddy, Y. Madaria, and A. Raveendra, “Designing a face shield frame in ptc creo and printing it in a 3d printer,” THE 8TH ANNUAL INTERNATIONAL SEMINAR ON TRENDS IN SCIENCE AND SCIENCE EDUCATION (AISTSSE) 2021, 2022. [Online]. Available: https://api.semanticscholar.org/CorpusID:254303359.
- S. S. Singh and S. K. Yadav, “Designing and fabrication of polymer based injection molding die using 3d printing,” International Journal for Research in Applied Science and Engineering Technology, 2022. [On- line]. Available: https://api.semanticscholar.org/CorpusID:253347887.
- A. Everitt, A. K. Eady, and A. Girouard, “Enabling multi-material 3d printing for designing and rapid prototyping of deformable and interactive wearables,” Proceedings of the 20th International Conference on Mobile and Ubiquitous Multimedia, 2021. [Online].
- Available: https://api.semanticscholar.org/CorpusID:247085106.
- F. Heiss, “Discrete choice methods with simulation,” Econometric Reviews, vol. 35, pp. 688 – 692, 2016. [Online]. Available: https://api.semanticscholar.org/CorpusID:155207994.

Table 1.
Comparative analysis.
| Literature | Focus | Methodology | Key Contribution |
|---|---|---|---|
|
[1] |
Deep Architectures in Computer Vision | Factorized convolutions, rigorous regularization | Improved accuracy on ILSVRC 2012 with computational efficiency |
|
[2] |
Bayesian Deep Learning for Computer Vision |
Modelling aleatoric and epistemic uncertainty |
Framework enhancing robustness and achieving state of the art results |
|
[3] |
Versatile Computer Vision Foundation Models |
Development of versatile models (Florence) |
Outstanding transfer learning performance, superior results in diverse tasks |
|
[4] |
Deep Learning in Medical Applications | Survey of decade-long progress in medical imaging |
Potential revolution in medical imaging and video analysis |
|
[5] |
Machine Learning for Robotics |
Task-agnostic training for high-performance learning |
Robotics Transformer model for improved performance and generalization |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



