
Submitted:
04 July 2024
Posted:
09 July 2024
You are already at the latest version
Abstract
We consider a system of two coupled parallel queues, queue 1 and queue 2, with infinite waiting rooms. The time setting is discrete. In either queue, the service of a customer requires exactly one discrete time slot. Arrivals of new customers occur independently from slot to slot, but the numbers of arrivals of both types within a slot may be mutually interdependent. Their joint probability generating function (pgf) is indicated as A(z1, z2) and characterizes the whole model. It is well-known that, in general, determining the steady-state joint probability mass function (pmf) u(m, n), m, n ≥ 0 or the corresponding joint pgf U(z1, z2) of the system contents (i.e., numbers of customers present) in both queues is a formidable task. Only in a number of isolated cases, for very specific choices of the arrival pgf A(z1, z2), explicit results are known in the literature. In this paper, we identify a multiparameter, generic class of arrival pgfs A(z1, z2), for which we can explicitly determine the system-content pgf U(z1, z2). We find that, for arrival pgfs of this class, U(z1, z2) has a denominator which is a product, say r1(z1)r2(z2) of two univariate functions. This property allows a straightforward inversion of U(z1, z2), resulting in a pmf u(m, n) which can be expressed as a finite linear combination of bivariate geometric terms. We also observe that our generic model encompasses most of the previously known results as special cases.
Keywords:
parallel queues
; discrete-time
; joint system-content distribution
; explicit solutions
1. Introduction
This paper fits into a greater scientific effort which aims at finding explicit analytic solutions for the joint probability distribution (or probability generating function) of the numbers of customers in a system of two coupled discrete-time queues. Various instances of such systems have been studied before, both differing in the cause of the coupling between the two queues or in the scientific perspective taken in the study.
With no claim on completeness, we mention a number of possible causes for the presence of coupling between queues. A first cause may be that the arrival streams into the queues are mutually interdependent or state-dependent, i.e., dependent on the system contents, i.e., the numbers of customers present in the queues. Mutual dependence between arrivals occurs, for instance, in the context of communications networks, where the nodes of the network contain switching systems which have to forward digital packets from many different origins to many different destinations. In such switches, each destination has (at least, conceptually) its own dedicated buffer to temporarily store arriving packets, and, since packets destined to one destination do not enter the output buffer associated to another destination, the arrivals within such output buffers are mutually correlated. Buffered slotted switches were studied, e.g., in [1,2,3,4,5,6]. State-dependence of arrivals occurs, for instance, in join-the-shortest-queue systems, where arriving customers adapt their behavior at the entrance of the system to the system contents upon arrival; see, e.g., [7,8,9]. More conceptual studies of queues with interdependent arrivals include [5,6,10,11].
Another (major) cause of coupling may be that the queues of the system have to share the same service facilities. This situation occurs, for instance, in polling systems, where one server periodically visits multiple customer queues to serve a number of customers and then go to the next queue; various variants of polling systems have been studied quite intensively in the past (see, e.g., [12,13,14,15,16,17,18,19]). Sharing of servers also occurs in so-called alternating service systems, where one server is allocated for alternating random durations of time to either of the two queues, regardless of the states of these queues, (see, e.g., [11,20,21,22,23,24,25,26,27,28]), or in priority queues, where one common service facility gives preferential service to one class of customers over the other class(es) of customers; a large body of research results is available on various types of priority queueing systems (see, e.g., [29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46]). Similar ideas are also implemented in so-called (generalized) processor sharing (GPS) systems, whereby the service facility is randomly allocated to multiple queues according to preset weights; as opposed to randomly alternating service systems, however, GPS-systems usually allow the server to deliver service to customers of a queue to which it is not allocated when the queue to which it is allocated is empty, thus making the system work-conserving. In fact, GPS-systems can also be viewed as systems with alternating priorities; some papers dealing with GPS-systems are [25,47,48,49,50,51]. We should also mention serve-the-longest-queue systems, where, upon a service completion, a server can autonomously decide to give preference to the queue that contains the largest number of customers; see, e.g, [52,53]. Recently, some authors have examined the combined join-the-shortest-queue and serve-the-longest-queue scenario; see [54,55].
A third possible cause of coupling in two-queue systems can be that (part of) the output stream of one queue constitutes (part of) the input stream into the other queue, such as in the context of tandem queues (see, e.g., [45,56,57]), or, more generally, in a network environment.
As far as the scientific perspective taken by various authors in the literature is concerned, we see a main difference between considering the involved (two-queue) queueing system as the basic concept of the study, where the determination of the joint (or, total) system-content distribution of both queues, the overflow probabilities, the customer delays, etc. is the main objective, versus a more fundamental, mathematically-oriented point of view, whereby the underlying random walks that model the system contents of both queues are the basic concepts of the study (see, e.g., [58,59,60,61,62]). Usually, the aim of such papers is to shed more light on the structural properties of these random walks required to admit elegant solutions. Moreover, the involved random walks are often of nearest-neighbor type, which is rather restrictive in a queueing context, and the structure of their transition probabilities may be quite arbitrary and not necessarily reflect the behavior of a queueing system.
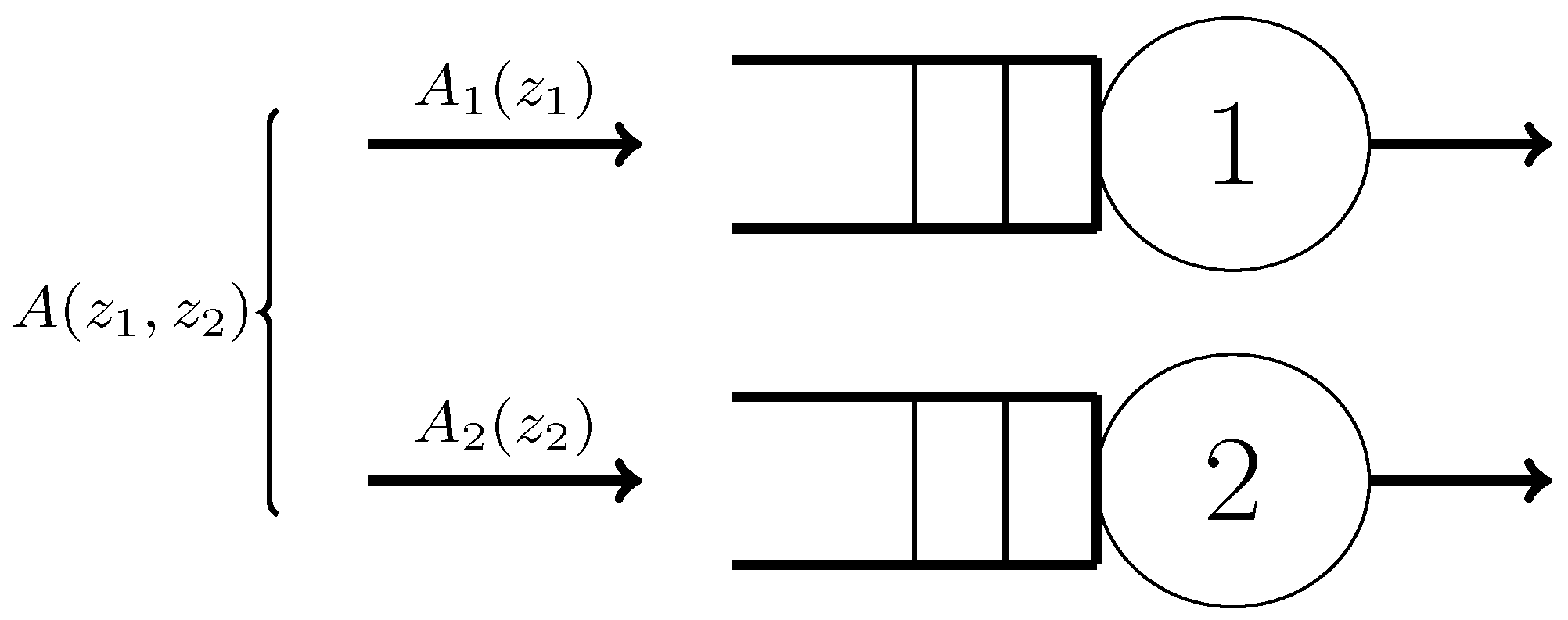
The present paper does not take the mathematical study of the random walk that models the two-queue system explicitly as a major point of interest, but rather concentrates on the explicit determination of the joint pgf of the two system contents in the two queues of the system. Specifically, we consider a conceptually very simple system of two coupled parallel discrete-time queues. The queues are named queue 1 and queue 2, both have their own dedicated server and infinite storage capacity. Customers arriving to queue 1 and to queue 2 are referred to as type-1 and type-2 customers, respectively. The service times of the customers are deterministically equal to one time slot, regardless of the customer type. New customer arrivals of both types occur independently from slot to slot, but are possibly type-interdependent within a slot. This is the only source of coupling in this model. Earlier studies of various instances of this type of two-queue system include [1,2,3,4,5,6,10,11,63].
It is well-known that, in general, determining the steady-state joint pgf of the system contents in a system of two coupled queues is a formidable task, because it requires the solution of a possibly complicated, nonlinear functional equation for , which contains the unknown boundary functions and/or . In many previous papers, the analysis consists of first determining these boundary functions through various complex-analysis techniques, upon which can be computed from the functional equation by subsequent substitution of the expressions found for and/or . In this paper, we use a different, purely algebraic, technique, which can be best described as a two-step process: first, we make an educated guess of the solution for , and, next, we prove that the proposed indeed satisfies the functional equation. Of course, in this approach, making an educated guess of the solution is crucial. In fact, this step is essentially a process of trial and error, based on the intuition gained from the preliminary study of a large number of simple special cases in earlier papers.
For the specific coupled-queues system considered in this paper, explicit results have been obtained thus far only in a number of isolated cases, for very specific choices of the arrival pgf (see, e.g., [5]). Furthermore, these special cases are of a rather simple nature: either the arrivals of both types should be mutually independent, or the two queues should receive identical numbers of arrivals in each slot, or one of both queues should receive no more than one single arrival per slot, implying that in this queue no accumulation of customers occurs. Some initial indications to extend the class of “solvable” arrival pgfs were also given in [5], but the extensions are limited.
In this paper, we introduce a multi-parameter, generic class of arrival pgfs , for which we succeed to explicitly determine the joint pgf , using the algebraic approach described above. By making specific choices for the many parameters of the model, we also define three interesting subclasses of arrival pgfs which lead to even more explicit solutions. We find that for arrival pgfs of the classes considered in this paper, the bivariate joint system-content pgf has a denominator which is a product, say of two univariate functions. This property allows a straightforward inversion of the pgf by means of an inversion technique we developed in a previous paper [11], resulting in a pmf which can be expressed as a finite linear combination of bivariate geometric terms. We observe that our generic model encompasses most of the previously known results as special cases. In fact, it was by studying these special cases that we developed the intuition needed to be able to identify the class of arrival pgfs introduced in this paper.
The rest of this paper is organized as follows. In Section 2 we introduce the detailed mathematical model of the system under study and establish a functional equation for the joint pgf . The solution of this functional equation is, in fact, the main purpose of the paper. Section 3 defines the generic class of arrival pgfs that will be studied in this paper. In Section 4, we present and prove the main result of the paper in the form of Theorem 1 which gives an explicit expression for the joint system-content pgf associated to the joint arrival pgf defined in Section 3. Section 5 defines three interesting subclasses, named A, B and C, of the generic class of arrival pgfs defined in Section 3, and establishes even more explicit formulas for the associated system-content pgfs in these cases, in the form of three corrolaries, also named A, B and C, of Theorem 1. In Section 6, we consider several instances of subclasses A, B and C, whereby specific choices are made for the various parameters and functions appearing in the formulations of Corrolaries A, B and C. Section 7 discusses a fundamental method to invert the system-content pgf , i.e., to determine the pmf from the pgf , and illustrates this techniques by means of specific examples within subclasses A, B and C. Finally, we state some concluding remarks in Section 8.
2. Mathematical Model and Queueing Analysis
We define the random variables and as the numbers of type-1 and type-2 arrivals, respectively, during slot k. Their joint probability mass function (pmf) and probability generating function (pgf) are indicated as
which are independent of k. The (marginal) pgfs of and are given by
respectively. The mean number of arrivals of type i per slot is denoted as . A graphical representation of the system under study is shown in Figure 1.
Let and indicate the system contents, i.e., the total numbers of customers present, in queue 1 and queue 2, respectively, including the customer(s) in service, if any, at the beginning of slot k. We indicate their joint pgf as
Furthermore, let and indicate the queue contents, i.e., the numbers of waiting customers, in queue 1 and queue 2, respectively, excluding the customer(s) in service, if any, at the beginning of slot k. We indicate their joint pgf as
It is not difficult to see that the following relationships exist between the system contents and the queue contents:
where we have introduced the notation to indicate the quantity .
The main purpose of the paper is to analyze the steady-state behavior of the queueing system under study, i.e., we are interested in determining the steady-state joint pgfs of the two system contents and/or queue contents, provided that such a steady state exists. Specifically, we wish to study the following limit functions:
if they exist. A steady state exists if and only if both queues are stable, i.e., receive, on average, less customers per slot than they can serve, i.e., if and only if the following stability conditions are fulfilled:
As mentioned in e.g., [5,6], the evolution of the system contents is described by the following system equations:
Using standard z-tranform techniques, the equations (8) can be translated into one corresponding transform equation between the joint pgfs and , by using definition (3). Assuming the system reaches a steady state, i.e., assuming the stability conditions (7) are met, letting the time parameter k go to infinity, and using the definitions (3) and (6), the latter transform equation translates into the following functional equation for the steady-state system-content pgf :
where the unknown function is defined as
and the kernel is given by
Although, in general, the functional Equation (9) is hard to solve for , it is fairly easy to derive explicit expressions for the marginal pgfs and of the individual system contents in queues 1 and 2, by choosing either or in (9), because such choices greatly simplify the L-function. As a result, we then obtain
Invoking the normalization condition yields and . The expressions in (12) are very well-known in the context of discrete-time queueing theory; see, for instance [64]; they will be very useful further in this paper.
We now turn our attention to the queue contents. Using (5) in (8), we readily get
Transforming these relationships to pgfs, we obtain, on account of the definitions (3) and (4),
In view of (6), this implies that
Equation (13) makes clear that is known as soon as is known, and vice versa. In the remainder of this paper, we mainly concentrate on the determination of .
3. Defining a Class of Arrival pgfs
Let , , , , , denote one-dimensional probability generating functions. Furthermore, let , , , denote a set of normalized probabilities, i.e.,
and and two nonnegative real parameters. We then use all the above quantities to define a whole class of bivariate functions as follows:
We now show that the above function is a genuine joint pgf, i.e., it can be developed as a two-dimensional power series in and with nonnegative coefficients which add up to 1.
It is clear that both and are normalized, i.e., and , which implies that is also normalized, i.e., . The numerator is a probabilistic mixture of four valid pgfs, and, therefore, is a valid pgf too. The function is also a genuine pgf since it can be developed as a two-dimensional power series in and with nonnegative coefficients as follows:
where the probabilies and have been defined as
Equation (15) thus shows that can be expressed as the product of two valid joint pgfs, and, therefore, is a valid joint pgf too.
In this paper, we will examine a parallel-queues system with joint arrival pgf defined in (14). The corresponding marginal arrival pgfs and are
The mean arrival rates and are
We assume that .
4. The Main Result
We are now ready to formulate the main result of this paper.
Theorem 1:
In the stable parallel-queues system with joint arrival pgf
where , , and are arbitrary one-dimensional pgfs, and
the steady-state joint system-content pgf is given by
provided that the functions and are genuine one-dimensional pgfs, given by
where and are two sets of “normalized constants”, i.e.,
satisfying the restrictions
4.1. Some Remarks on the Terms of Theorem 1
According to equations (24), Theorem 1 requires that be a linear combination of , and , and, similarly that a linear combination of , and , with coefficients that add up to 1. It is easily seen that, as required, this implies that and are normalized, i.e., . However, for arbitrary choices of the parameters , , , , and , the functions and , as given in (24), could, in general, contain linear terms in or with a negative coefficient, which would prevent them from being genuine pgfs. Indeed, whereas the coefficients , , and are certainly nonnegative, this not necessarily the case for the coefficients of the linear terms in (24). It is clear that sufficient conditions to guarantee that and are valid pgfs are
but these conditions are not necessary. In order to determine the linear terms in (24) completely, it is useful to decompose the functions , , and as follows:
and
4.2. Proving Theorem 1
In order to prove Theorem 1, we first establish a technical lemma. Let us define the bivariate function as
Lemma 1:The function can be expressed as
Proof.
Proof of Theorem 1
The proof of Theorem 1 consists of two steps. In a first step, we show that the function , defined in (23), is a genuine joint pgf. In the second step, we prove that, under the conditions of Theorem 1, satisfies the functional Equation (9) of the system.
Step 1: is a genuine joint pgf
Proof.
Step 2: satisfies the functional equation
Proof.
Inserting the expression (15) for then leads to
The function can be computed from (10) as
where and can be derived from (23) as
which also implies
Substitution of (43) and (44) in (42) then leads to
where we have defined and as short-hand notations for
On the other hand, in view of (23), can be expressed as
Inserting (42) and (46) in (41), we then get
It thus suffices to show that the expressions between the large parentheses in the left-hand side and the right-hand side of (47) are equal. The expression in the left-hand side is exactly the function , defined in (32). Lemma 1 thus proves that (47) is fulfilled. This concludes the proof of Theorem 1. □
5. Subclasses A, B and C
Theorem 1 provides an explicit solution for the steady-state joint system-contents pgf , for any joint arrival pgf that satisfies the shape specified in equations (21), (24), (25) and (26), whereby and are valid pgfs. We now define some interesting subclasses of arrival pgfs that correspond to specific choices of the (many) parameters that the model contains.
5.1. Subclass A:
In this special case, and the arrival pgf , defined in (14), simplifies to
We define the subclass A of arrival pgfs by the condition . We notice that, within subclass A, the pgfs and play no role anymore in . We also observe that, since , the joint queue-content pgf , given in (13), reduces to
and, hence, our main result (23) in Theorem 1 is equivalent to
i.e., for arrival pgfs within subclass A, the queue contents of both queues are mutually independent.
The parameters and , defined in (26), are both equal to zero, and, hence, the functions and , defined in (24), are given by
Substitution of (50) in (48) then leads to
which can be rewritten as
if we define the new parameters , , and as
It is easily seen that, if we choose and , the sufficient conditions (27) are fulfilled, and the parameters , , and also represent a normalized set of probabilities, just as the original parameters , , and , i.e.,
The marginal arrival pgfs and , given in (17), reduce to
whereas the marginal mean arrival rates, given in (18), simplify to
Hence, the stability conditions are equivalent with
The functions and , defined in (20), reduce to
and, hence, the joint pgf can be derived from (23) as
where the constant M is defined as
The only remaining unknown M in Equation (55) can be computed from the normalization condition , which results in
A fully explicit expression for then follows from (55) and (56).
In summary, we have thus proven the following corrolary of Theorem 1:
Corrolary A
In the stable parallel-queues system with joint arrival pgf
where and are arbitrary one-dimensional pgfs, and
the steady-state queue contents of both queues are mutually independent, and the steady-state joint system-content pgf is given by
Remark
If we define the discriminant D of as , then it is easily seen that if , the pgf has a product form, i.e.,
and the arrivals of both customer types are mutually independent. It is clear from (59) that, in this case, the pgf reduces to a product form too, i.e., the two steady-state system contents are also mutually independent.
5.2. Subclass B:
The requirements (27) represent sufficient conditions to guarantee that the functions and are valid pgfs. A trivial way to satisfy (27) is to choose
We define the subclass B of arrival pgfs by the condition (60). From (25) and (26), it follows that (60) is equivalent with
Substitution of (60) in (24) then yields
Equation (62) implies that
so that the mean arrival rates, given in (18), can be expressed as
The functions and , defined in (20), are given by
The joint pgf can be derived from (23) and (64) as
where the constant M has been defined as
The only remaining unknown M in Equation (88) can be computed from the normalization condition , which results in
A fully explicit expression for then follows from (65) and (66).
Summarizing again, we have thus proven the following corrolary of Theorem 1:
Corrolary B
In the stable parallel-queues system with joint arrival pgf
where is defined as
with , , , arbitrary one-dimensional pgfs, and
the steady-state joint system-content pgf is given by
with
5.3. Subclass C: No Linear Terms in and
The requirements (31) are necessary and sufficient conditions in order for and to represent genuine pgfs. In this subsection, we examine the extreme case whereby the inequalities in (31) are replaced by equalities, i.e., where
In view of (25) and (26), (71) can be rewritten as
Solving (72) for and , we find
In these circumstances, due to (30), the functions and can be expressed as
and, hence, contain no linear terms in and , respectively.
In order to further simplify the expressions, let us consider the (further) special case where
Of course, we then also have . From (28) and (29), we readily obtain
and, hence, implies
We now choose to additionally simplify the model by assuming
where we have introduced the new parameters and , which are valid probabilities.
By definition, we refer to arrival pgfs (of the form considered in Theorem 1) as pgfs of subclass C if and only if they comply with the conditions (71), (75) and (76).
From their definitions in (28) and (29), it follows that the functions and only contain powers of and with nonnegative coefficients, but are not necessarily normalized. It is useful to replace them by new functions, say and , that do satisfy a normalization condition, and, hence, are genuine pgfs, as follows:
All the defining functions of our model can then be expressed in terms of the pgfs and as follows:
where we have defined the probabilities and as
The marginal mean arrival rates can be computed from (18), which results in
Consequently, the stability conditions are equivalent with
The functions and that constitute the denominator of can be derived from (39):
where we have also used (82). Introducing the notations and as
we can compute the joint pgf from (23) and (86) as
where the constant M has been defined as
As before, the remaining unknown M can be determined by invoking the normalization condition , which results in
A fully explicit expression for then follows from (88), (87) and (89).
Summarizing again, we have thus proven the following corrolary of Theorem 1:
Corrolary C
In the stable parallel-queues system with joint arrival pgf
where
with and arbitrary one-dimensional pgfs, and
the steady-state joint system-content pgf is given by
where
and
6. Special Cases within Subclasses A, B and C
In this section we consider several instances of subclasses A, B and C, whereby specific choices are made for the various parameters and functions appearing in the formulations of Corrolaries A, B and C.
6.1. Special Cases within Subclass A
6.1.1. At Most One Arrival per Slot in Queue 1
Here we choose
which implies that the pgf , given in (57), reduces to
which is clearly linear in , meaning that queue 1 receives at most one arrival per slot. The marginal arrival pgf and the mean arrival rate follow from (53) and (54) as
from which we can deduce that
According to Corrolary A, the pgf can be obtained from (59) by substitution of (95), i.e.,
Owing to (96) and (52), this can be rewritten as
This particular result is well-known. We first established it through an alternative, more direct, approach in our earlier short paper [5]. It is interesting that we retrieve it here as a very simple special case of our more general results.
6.1.2. The Case
Again in our earlier paper [5], we stated (without proof) the following theorem. Later, we also provided a formal proof in [11].
Theorem 2:If denotes the joint system-content pgf in a parallel-queues system with joint arrival pgf , and a new arrival pgf is defined as
then the joint system-content pgf corresponding with arrival pgf is given by
Specifically, if the arrivals of both types are mutually independent in the original system, i.e., if has a product form, , then has a product form too, i.e., , with, similar to (12),
and (99) reduces to
It is remarkable that we can easily retrieve this property as a simple instance of our subclass-A results, if we choose
Indeed, equations (57) and (59) from the formulation of Corrolary A are then equivalent with equations (97) and (99) from the formulation of Theorem 2. We do emphasize that Theorem 2 was proven to be valid also if does not have a product form.
6.1.3. Geometric f-Distributions
6.1.4. Binomial f-Distributions
Here, we choose binomial distributions of order 2, again with respective mean values and , for the pgfs and :
The arrival pgf follows from (57) as
and is a quadratic polynomial in both and . Again, the stability conditions are equivalent with .
6.1.5. Batch-2-Geometric f-Distributions
Here, we choose batch-2-geometric distributions with respective mean values and for the pgfs and :
The terminology batch-2-geometric reflects the fact that a random variable with this distribution can only take values equal to geometrically distributed multiples of the batch-size 2. The arrival pgf follows from (57) as
where is a cubic polynomial in both and , defined as
Once again, the stability conditions are equivalent with .
6.2. Special Cases within Subclass B
In subclass A, the bivariate arrival pgf is completely determined by the univariate pgfs and , and the pgfs and play no role. In subclass B, however, all the defining one-dimensional pgfs contribute to . In order to specifically examine the effect of and , we consider two examples where , combined with different choices for and .
6.2.1. The Case
Here, we choose
The arrival pgf follows from (67) and (68) as
In view of (63), the marginal mean arrival rates are
and, hence, the stability conditions are equivalent with .
The joint system-content pgf can be obtained by using (105) in (68), (65) and (66), which results in
The zeroes of the denominator are given by
Remark
It is worth mentioning that a special instance of this case was treated in our recent paper [6]. There, we considered a parallel-queues system, whereby the total number of arrivals per slot (of both customer types together) has a shifted geometric distribution with pgf and mean value , i.e., , and new arrivals are routed independently and probabilistically to queue 1 or 2 with probabilities p and respectively, implying that the joint arrival pgf is given by
The proof in [6] was a (rather complicated) constructive proof, whereby we explicitly solved the functional Equation (9),
by expressing that the unknown function should vanish for all in the area of convergence of for which the kernel vanishes. This allowed us to determine the boundary functions and , and, from this, the function , and, eventually, the pgf , as given in (109).
The function in (108) is clearly of the form (106) considered in the current subsection, provided we choose
We now show that the solution (109) can be easily retrieved from the results in the current subsection.
Proof.
We have thus been able, once again, to recover a specific existing result as a particular case of the results of the current paper.
6.2.2. The Case
Here, we choose
The marginal mean arrival rates can be deduced from (63):
and, hence, the stability conditions are equivalent with .
The joint system-content pgf can be obtained by using (114) in (68), (65) and (66), which results in
Again, it is easy to show that the zeroes of the denominator lie outside the unit disks and in the complex -plane and -plane, respectively. We return to this special case in more detail further in the paper.
6.3. Special Cases within Subclass C
In order to simplify the expressions in this subsection, we first make the following assumptions:
The marginal mean arrival rates are
which implies that the stability conditions are equivalent with . From (93) and (94), we get
and
It then follows from (92) that the system-content pgf is given by
We now make a number of different choices for the pgfs and .
6.3.1. Bernoulli c-Distributions
Here, we choose Bernoulli distributions with parameters and for the pgfs and :
The pgf then reduces to
We come back to this special case further in this paper.
6.3.2. Geometric c-Distributions
Here, we choose geometric distributions with respective mean values and for the pgfs and :
The pgf then reduces to
The zeroes of the denominator are given by
6.3.3. Negative Binomial c-Distributions
Here, we choose negative binomial distributions of order two for the pgfs and :
In this case, the pgf is given by
where
Again, the zeroes of the denominator are the solutions of quadratic equations and can be computed explicitly; also, it is not difficult to show that they lie outside the unit disks in the -plane and the -plane; their exact expressions are omitted, as they are of no particular importance at this stage.
7. Inverting the Joint pgf
In this section, we focus on the derivation of the steady-state joint probability mass function (pmf) of the system contents in queues 1 and 2, which is defined as
and is related to the joint pgf by the equation
In an earlier paper [11], we proved (with slightly different notations) the following useful theorem to determine from for “interior states” in the state space.
Theorem 3
If the joint pgf is arationalfunction of and of the form
where the numerator is a bivariate polynomial of degree in and in , and the denominator is a product of two univariate functions and , having only zeroes of multiplicity 1, and the numerator and the denominator are mutually prime, then threshold values and can be defined as , such that for , the pmf is given by a finite linear combination of bivariate geometric terms, i.e.,
where
7.1. Some Comments
In all the examples that we have considered in this paper, we have chosen rational functions for the constituting one-dimensional pgfs , , , , , of the joint arrival pgf , defined in (21). This implies that the pgf , given in (23) by
is a rational bivariate function whose denominator is a product of two univariate functions, and can therefore be expressed in the form required to apply Theorem 3.
By definition, the quantities and , occurring in (122), are the zeroes of (or ) and (or ). According to (122), the geometric decay rates of the system-content distribution are the inverse values of these zeroes, i.e., the ith decay rate for queue 1 is equal to , and the jth decay rate for queue 2 is given by . Each bivariate geometric term in thus corresponds to a couple of zeroes of and , but the opposite is not necessarily true, since, for some i and j, it may happen that the coefficient in Equation (122) is zero. According to (123), this situation occurs if . If this is the case for one or more couples , the number of nonzero bivariate geometric terms in is lower than the product .
7.2. Specific Examples
In this subsection, we apply Theorem 3 in a number of examples of arrival pgfs belonging to subclasses A, B and C, as defined before.
7.2.1. An Example within Subclass A
In this example, we revisit the model of subSection 6.1.3. The system-content pgf is given in (102). The parameters and functions, appearing in the formulation of Theorem 3 are , and
with
The zeroes of and are
The coefficient can be computed from (123) as
Finally, the pmf for interior states follows from (122) as
7.2.2. An Example within Subclass B
Here, we consider a symmetric instance of the model of subSection 6.2.2, with the following specific parameter choices:
The joint system-content pgf can be obtained from (115):
We can apply Theorem 3 with ,
and
The zeroes of and lie outside the unit disks and in the complex -plane and -plane, respectively, and are given by
The coefficients can be computed from (123):
In general, all these coefficients are nonzero, and the linear combination in (122) contains four terms:
Careful study shows that it is impossible to choose the parameter , appearing in (125), in such a way that the coefficients , or are zero, but there does exist a value of such that vanishes; the required -value is
This is an acceptable value since it implies that
7.2.3. An Example within Subclass C
We now go back to the model in subSection 6.3.1. Here, the system-content pgf is given by (118). We can apply Theorem 3 provided we choose ,
where, owing to (117), is given by
The zeroes of and lie outside the unit disks and in the complex -plane and -plane, respectively, and are given by
Again, in general, all these coefficients are nonzero, and the linear combination in (122) contains four terms:
Let denote the value of d that makes zero, then we can easily compute the following values:
Taking into account the stability conditions , as we have shown in subSection 6.3.1, it is readily seen that all these d-values are positive, as required, but none of them is lower than , which is also necessary, because in this model, according to (116), and needs to be positive. We conclude that, in this particular case, the pmf always contains exactly four bivariate geometric terms, as shown in (128).
8. Concluding REMARKS
This paper has considered the steady-state queueing analysis of a system of two parallel discrete-time single-server queues with mutually interdependent arrivals, characterized by the joint arrival pgf . We have identified a very broad, multi-parameter, generic, class of arrival pgfs for which we were able to determine explicit analytic solutions for the joint system-content pgf . We think this is the main virtue of the paper. It is also interesting to observe that our results encompass most of the previously known results for this kind of system, which is known to be hard to analyze.
Although the class of arrival pgfs examined in this paper is very broad, it still has its limitations, which are mainly due to the shape of the arrival pgf, i.e., Equation (14),
and the requirement that the pgfs appearing in the above expression should be related as stated in equations (24) or (33), which can be rewritten as
Since the parameters and need to be strictly positive – we need this in the proof of Lemma 1 – we can thus not have a constant numerator for without the requirement that the denominator be also constant. Hence, a seemingly simple arrival pgf like
is not a special case of our model. So far, we have never seen a solution for the “global geometric” arrival pgf in (129), and the current paper also does not provide one.
Future work could go in several directions. We may try to further extend the class of arrival pgfs which lead to explicit solutions for the parallel-queues system, dealt with in this paper, but we may also consider other types of coupled queues, such as the (other) ones mentioned in the introduction section of this paper.
References
- Jaffe, S. The equilibrium distribution for a clocked buffered switch. Probability in the Engineering and Informational Sciences 1992, 6, 425–438. [Google Scholar] [CrossRef]
- Boxma, O.; van Houtum, G. The compensation approach applied to a 2x2 switch. Probability in the Engineering and Informational Sciences 1993, 7, 471–493. [Google Scholar] [CrossRef]
- Cohen, J. On the determination of the stationary distribution of a symmetric clocked buffered switch. In Proc. ITC-15, Teletraffic Contributions for the Information Age; Ramaswami, V.; Wirth, P., Eds.; Elsevier, 1997; Vol. 2a, pp. 297–307.
- Adan, I.; Boxma, O.; Resing, J. Queueing models with multiple waiting lines. Queueing Systems 2001, 37, 65–98. [Google Scholar] [CrossRef]
- Bruneel, H. Some thoughts on the analysis of coupled queues. Queueing Systems 2022, 100, 185–187. [Google Scholar] [CrossRef]
- Bruneel, H.; Devos, A. Asymptotic behavior of a system of two coupled queues when the content of one queue is very high. Queueing Systems 2023, 105, 189–232. [Google Scholar] [CrossRef]
- Cohen, J. Analysis of the asymmetrical shortest two-server queueing model. Journal of Applied Mathematics and Stochastic Analysis 1998, 11, 115–162. [Google Scholar] [CrossRef]
- Dimitriou, I. Analysis of the symmetric join the shortest orbit queue. Operations Research Letters 2021, 49, 23–29. [Google Scholar] [CrossRef]
- Adan, I.; Boxma, O.; Kapodistria, S.; Kulkarni, V. The shorter queue polling model. Annals of Operations Research 2016, 241, 167–200. [Google Scholar] [CrossRef]
- Wright, P.E. Two parallel processors with coupled inputs. Advances in Applied Probability 1992, 24, 986–1007. [Google Scholar] [CrossRef]
- Bruneel, H.; Devos, A. Coupled queues whose stationary joint content distribution is a finite sum of bivariate geometric terms. submitted 2024. [Google Scholar]
- Takagi, H. Queuing analysis of polling models. ACM Computing Surveys (CSUR) 1988, 20, 5–28. [Google Scholar] [CrossRef]
- Levy, H.; Sidi, M. Polling systems: applications, modeling, and optimization. IEEE Transactions on Communications 1990, 38, 1750–1760. [Google Scholar] [CrossRef]
- Vishnevskii, V.; Semenova, O. Mathematical methods to study the polling systems. Automation and Remote Control 2006, 67, 173–220. [Google Scholar] [CrossRef]
- de Haan, R.; Boucherie, R.; van Ommeren, J. A polling model with an autonomous server. Queueing Systems 2009, 62, 279–308. [Google Scholar] [CrossRef]
- Al Hanbali, A.; de Haan, R.; Boucherie, R.; van Ommeren, J. Time-limited polling systems with batch arrivals and phase-type service times. Annals of Operations Research 2012, 198, 57–82. [Google Scholar] [CrossRef]
- Saxena, M.; Boxma, O.; Kapodistria, S.; Nunez Queija, R. Two queues with random time-limited polling. Probability and Mathematical Statistics 2017, 37, 257–289. [Google Scholar]
- Borst, S.; Boxma, O. Polling: past, present, and perspective. Top 2018, 26, 335–369. [Google Scholar] [CrossRef]
- Vishnevsky, V.; Semenova, O. Polling systems and their application to telecommunication networks. Mathematics 2021, 9, 117. [Google Scholar] [CrossRef]
- Eisenberg, M. Two queues with alternating service. SIAM Journal on Applied Mathematics 1979, 36, 287–303. [Google Scholar] [CrossRef]
- Coffman, E.; Fayolle, G.; Mitrani, I. Two queues with alternating service periods. Proceedings of the 12th IFIP WG 7.3 International Symposium on Computer Performance Modelling, Measurement and Evaluation, 1987, pp. 227–239.
- Feng, W.; Kowada, M.; Adachi, K. A two-queue model with Bernoulli service schedule and switching times. Queueing Systems 1998, 30, 405–434. [Google Scholar] [CrossRef]
- Devos, A.; Fiems, D.; Walraevens, J.; Bruneel, H. An approximate analysis of a Bernoulli alternating service model. International Conference on Queueing Theory and Network Applications. Springer, 2019, pp. 314–329.
- Devos, A.; Walraevens, J.; Fiems, D.; Bruneel, H. Approximations for the performance evaluation of a discrete-time two-class queue with an alternating service discipline. Annals of Operations Research 2020, 1–27. [Google Scholar] [CrossRef]
- Devos, A.; Walraevens, J.; Fiems, D.; Bruneel, H. Heavy-Traffic Comparison of a Discrete-Time Generalized Processor Sharing Queue and a Pure Randomly Alternating Service Queue. Mathematics 2021, 9, 2723. [Google Scholar] [CrossRef]
- Devos, A. Analysis of a two-class queueing model with randomly alternating service. PhD thesis, Ghent University, 2022.
- Devos, A.; Walraevens, J.; Fiems, D.; Bruneel, H. Analysis of a discrete-time two-class randomly alternating service model with Bernoulli arrivals. Queueing Systems 2020, 96, 133–152. [Google Scholar] [CrossRef]
- Devos, A.; De Muynck, M.; Bruneel, H.; Walraevens, J. A product-form solution for a two-class Geo/Geo/D/1 queue with random routing and randomly alternating service. EAI International Conference on Perfor- mance Evaluation Methodologies and Tools. Springer, 2022, pp. 81–95.
- Walraevens, J.; Steyaert, B.; Bruneel, H. Delay characteristics in discrete-time GI-G-1 queues with non- preemptive priority queueing discipline. Performance Evaluation 2002, 50, 53–75. [Google Scholar] [CrossRef]
- Walraevens, J.; Steyaert, B.; Bruneel, H. Performance analysis of a single-server ATM queue with a priority scheduling. Computers & Operations Research 2003, 30, 1807–1829. [Google Scholar]
- Walraevens, J.; Steyaert, B.; Bruneel, H. Performance analysis of a GI-Geo-1 buffer with a preemptive resume priority scheduling discipline. European Journal of Operational Research 2004, 157, 130–151. [Google Scholar] [CrossRef]
- Walraevens, J.; Steyaert, B.; Bruneel, H. A packet switch with a priority scheduling discipline: Performance analysis. Telecommunication Systems 2005, 28, 53–77. [Google Scholar] [CrossRef]
- Walraevens, J.; Steyaert, B.; Moeneclaey, M.; Bruneel, H. Delay analysis of a HOL priority queue. Telecom- munication Systems 2005, 30, 81–98. [Google Scholar] [CrossRef]
- Walraevens, J.; Fiems, D.; Bruneel, H. The discrete-time preemptive repeat identical priority queue. Queueing Systems 2006, 53, 231–243. [Google Scholar] [CrossRef]
- Maertens, T.; Walraevens, J.; Bruneel, H. On priority queues with priority jumps. Performance Evaluation 2006, 63, 1235–1252. [Google Scholar] [CrossRef]
- Walraevens, J.; Steyaert, B.; Bruneel, H. A preemptive repeat priority queue with resampling: Performance analysis. Annals of Operations Research 2006, 146, 189–202. [Google Scholar] [CrossRef]
- Maertens, T.; Walraevens, J.; Bruneel, H. A modified HOL priority scheduling discipline: performance analysis. European Journal of Operational Research 2007, 180, 1168–1185. [Google Scholar] [CrossRef]
- Walraevens, J.; Wittevrongel, S.; Bruneel, H. A discrete-time priority queue with train arrivals. Stochastic models 2007, 23, 489–512. [Google Scholar] [CrossRef]
- Maertens, T.; Walraevens, J.; Bruneel, H. Priority queueing systems: from probability generating functions to tail probabilities. Queueing Systems 2007, 55, 27–39. [Google Scholar] [CrossRef]
- Maertens, T.; Walraevens, J.; Bruneel, H. Performance comparison of several priority schemes with priority jumps. Annals of Operations Research 2008, 162, 109–125. [Google Scholar] [CrossRef]
- Walraevens, J.; Steyaert, B.; Bruneel, H. Analysis of a discrete-time preemptive resume priority buffer. European Journal of Operational Research 2008, 186, 182–201. [Google Scholar] [CrossRef]
- Walraevens, J.; Fiems, D.; Bruneel, H. Time-dependent performance analysis of a discrete-time priority queue. Performance Evaluation 2008, 65, 641–652. [Google Scholar] [CrossRef]
- Walraevens, J.; Maertens, T.; Bruneel, H. A semi-preemptive priority scheduling discipline: performance analysis. European Journal of Operational Research 2013, 224, 324–332. [Google Scholar] [CrossRef]
- Walraevens, J.; Bruneel, H.; Fiems, D.; Wittevrongel, S. Delay analysis of multiclass queues with correlated train arrivals and a hybrid priority/FIFO scheduling discipline. Applied Mathematical Modelling 2017, 45, 823–839. [Google Scholar] [CrossRef]
- De Clercq, S.; Walraevens, J. Delay analysis of a two-class priority queue with external arrivals and correlated arrivals from another node. Annals of Operations Research 2020, 293, 57–72. [Google Scholar] [CrossRef]
- Walraevens, J.; Van Giel, T.; De Vuyst, S.; Wittevrongel, S. Asymptotics of waiting time distributions in the accumulating priority queue. Queueing Systems 2022, 101, 221–244. [Google Scholar] [CrossRef]
- Konheim, A.; Meilijson, I.; Melkman, A. Processor-sharing of 2 parallel lines. Journal of Applied Probability 1981, 18, 952–956. [Google Scholar] [CrossRef]
- Parekh, A.; Gallager, R. A generalized processor sharing approach to flow control in integrated services networks: the single-node case. IEEE/ACM transactions on networking 1993, 1, 344–357. [Google Scholar] [CrossRef]
- Núnez-Queija, R. Sojourn times in a processor sharing queue with service interruptions. Queueing systems 2000, 34, 351–386. [Google Scholar] [CrossRef]
- Walraevens, J.; van Leeuwaarden, J.; Boxma, O. Power series approximations for generalized processor sharing systems. Queueing Systems 2010, 66, 107–130. [Google Scholar] [CrossRef]
- Vanlerberghe, J.; Walraevens, J.; Maertens, T.; Bruneel, H. A procedure to approximate the mean queue content in a discrete-time generalized processor sharing queue with Bernoulli arrivals. Performance Evaluation 2019, 134, 102001. [Google Scholar] [CrossRef]
- Gail, H.; Grover, G.; Guérin, R.; Hantler, S.; Rosberg, Z.; Sidi, M. Buffer size requirements under longest queue first. Performance Evaluation 1993, 18, 133–140. [Google Scholar] [CrossRef]
- Pedarsani, R.; Walrand, J. Stability of multiclass queueing networks under longest-queue and longest- dominating-queue scheduling. Journal of Applied Probability 2016, 53, 421–433. [Google Scholar] [CrossRef]
- Perel, E.; Perel, N.; Yechiali, U. A polling system with ‘Join the shortest-serve the longest’policy. Computers & Operations Research 2020, 114, 104809. [Google Scholar]
- Perel, E.; Perel, N.; Yechiali, U. A 3-queue polling system with join the shortest-serve the longest policy. Indagationes Mathematicae 2023, 34, 1101–1120. [Google Scholar] [CrossRef]
- Van Leeuwaarden, J.; Resing, J. A tandem queue with coupled processors: computational issues. Queueing Systems 2005, 51, 29–52. [Google Scholar] [CrossRef]
- Resing, J.; Ormeci, L. A tandem queueing model with coupled processors. Operations Research Letters 2003, 31, 383–389. [Google Scholar] [CrossRef]
- Malyshev, V. An analytical method in the theory of two-dimensional positive random walks. Siberian Mathematical Journal 1972, 13, 917–929. [Google Scholar] [CrossRef]
- Cohen, J. Analysis of a two-dimensional algebraic nearest-neighbour random walk (queue with paired services). Technical report, CWI, Amsterdam, 1994.
- Cohen, J. On a class of two-dimensional nearest-neighbour random walks. Journal of Applied Probability 1994, 31, 207–237. [Google Scholar] [CrossRef]
- Fayolle, G.; Malyshev, V.; Iasnogorodski, R. Random walks in the quarter-plane; Vol. 40, Springer, 1999.
- Adan, I.; van Leeuwaarden, J.; Raschel, K. The compensation approach for walks with small steps in the quarter plane. Combinatorics Probability & Computing 2013, 22, 161–183. [Google Scholar] [CrossRef]
- Cohen, J. On the asymmetric clocked buffered switch. Queueing Systems 1998, 30, 385–404. [Google Scholar] [CrossRef]
- Bruneel, H.; Kim, B. Discrete-time models for communication systems including ATM; Kluwer Academic Publisher: Boston, 1993. [Google Scholar]
Figure 1.
System of two coupled parallel queues
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



