
Submitted:
09 July 2024
Posted:
10 July 2024
You are already at the latest version
Abstract
This paper presents the design, modelling, and comparative analysis of two internal MEMS vibrating ring gyroscopes for harsh environmental conditions. The proposed designs investigate the symmetric structure of the vibrating ring gyroscopes that operate at the identical shape of wine glass mode resonance frequencies for both driving and sensing purposes. This approach improves the gyroscope’s sensitivity and precision in rotational motion. The analysis starts with the investigation of the dynamic behaviour of the vibrating ring gyroscope with the detailed derivation of motion equations. A comprehensive evaluation of the design geometry, meshing technology, and simulation results presented on two internal vibrating ring gyroscopes. The two designs are distinguished by their support spring configurations and internal ring structures. Design I comprises eight semicircular support springs and Design II comprises with sixteen semicircular support springs. These designs were modelled and analyzed using finite element analysis (FEA) in Ansys software. The paper further evaluates static and dynamic performance, emphasizing mode matching and temperature stability. The results reveal that Design II, with additional support springs, offers better mode matching, higher resonance frequencies, and better thermal stability compared to Design I. Additionally, electrostatic, modal, and harmonic analyses highlight the gyroscope's behaviour under varying DC voltages and environmental conditions. Furthermore, the study investigates the impact of temperature fluctuations on performance, demonstrating the robustness of the designs within a temperature range of -100°C to 100°C. These research findings suggest that the internal vibrating ring gyroscopes are highly suitable for harsh conditions such as high-temperature applications and space applications.
Keywords:
MEMS vibrating ring gyroscope
; inertial sensors
; harsh environments
; mode matching
; space applications
; inertial measurement unit (IMU)
; ring resonator
1. Introduction
In the modern era of technological advancement, where miniaturization, energy efficient, and high-performance devices are integral in many applications. Microelectromechanical Systems (MEMS) have become an important part of many advanced smart electronic systems [1,2,3,4]. These microscale devices are made up of tiny mechanical and electrical structures on a single electronic chip, enabling their use in a wide spectrum of applications ranging from healthcare to automotive to space applications.
MEMS devices are particularly attractive due to their easy integration with a broad range of fields, including biomedical, space, automotive, and consumer electronics. MEMS inertial sensors are crucial sensors of inertial measurement unit (IMU) which have been extensively used in inertial navigation [5] for space applications[6,7]. The vibrating gyroscope is one of integral component of inertial measurement unit (IMU), which is used to detect and control rotational motion in many different technologies. There are various types of MEMS vibrating gyroscopes exist. However, MEMS vibrating ring gyroscopes possess many advantages than the other vibrating gyroscopes because of their identical mode of vibrations and symmetric design structure.
The main objective of this research is to design and showcase an innovative design for a MEMS vibrating ring gyroscope for harsh conditions. As previously mentioned, the MEMS vibrating ring gyroscope operates at two identical resonance frequencies for driving and sensing mechanisms [8,9,10,11,12]. The ring structure in the MEMS vibrating ring gyroscope allows a unique implementation of identical vibrational modes for both the driving and sensing mode systems [13,14,15,16]. This symmetric design offers enhanced gyroscope sensitivity and precision in detecting rotational rates and motions [17,18,19].
If the vibrating ring gyroscope operates at the same resonance frequencies for driving and sensing, it exhibits an optimal and high performance. However, there are many practical anomalies encountered by MEMS designers during the design and fabrication phases of these MEMS gyroscopes. The errors encountered in the processes affect the performance characteristics of the MEMS gyroscopes[20,21,22]. These gyroscopes are highly susceptible to changes in environmental conditions and in microfabrication process errors [21,23,24,25,26]. These errors result in a mode mismatch in the resonance frequencies, leading to a discrepancy between the frequencies of the driving and sensing modes. MEMS vibrating ring gyroscope is a popular design of vibrating gyroscopes. It consists of a ring resonator supported by semicircular springs that are attached to the anchors to support the whole structure of the vibrating gyroscope. The symmetric design structure of the MEMS vibrating ring gyroscope provides high thermal stability and low mode mismatch resonance frequency value, which are crucial to operating in harsh environments. However, traditional vibrating ring gyroscopes’ sensitivity is compromised when exposed to high-temperature fluctuations and unwanted atmospheric vibrations.
To compensate the above shortcomings of traditional vibrating ring gyroscopes, we investigated two designs of MEMS vibrating internal ring gyroscopes that incorporate an internal ring with semicircular support springs attached to the externally placed anchor. The analysis starts with the motion equations of the MEMS vibrating ring gyroscope. Further, a thorough analysis of the design geometry, meshing methodology, and the modelled results and comparison was done on designs I and II of the selected MEMS vibrating internal ring gyroscope. The design of the internal ring gyroscope offers a higher desired resonance frequency with less mode mismatch value than the traditional external ring gyroscope.
The later section of the paper discusses a thorough investigation of the temperature analysis and mode matching of the vibrating internal ring gyroscopes. The temperature analyses include thermal stresses, thermal strains, and thermal deformations of the vibrating structure when exposed to the temperature range of -100°C to 100°C. Further, the two designs were analyzed for mode matching and compared with the traditional external ring gyroscope. An FEA-based model is implemented in Ansys and compares the results of the two selected MEMS vibrating internal ring gyroscopes.
2. Design Analysis
A MEMS vibrating ring gyroscope works on the principle of vibrating structure motion and the Coriolis force with a symmetric design structure. The design consists of the ring-shaped drive mode oscillator that generates and maintains a constant elliptical vibration mode along the driving axis. The drive mode system comprises the ring, beam, and support anchor structures with driving electrodes. There is a sense mode system about 45 degrees from the drive mode system. The sense mode system comprises on the ring resonator structure, beam, and support anchor structures with sensing electrodes. The sensing electrodes are designed to detect the developed Coriolis forces because of the rotation applied to the system.
The dynamic operations of a MEMS vibrating ring gyroscope involve in the monitoring and analysis of the Coriolis forces detected by the sensing electrodes. These Coriolis forces result from the vibrating ring interacting with externally applied angular rates, allowing for precise measurement of rotation and orientation changes. The design and implementation of these vibrating ring gyroscopes make them ideal candidates for applications requiring high accuracy and reliability in harsh conditions. A typical MEMS vibrating ring gyroscope dynamic system is schematically illustrated in Figure 1.
A ring structure, eight straight beams, and eight support anchors are placed around the set of driving and sensing electrodes, as shown in Figure 1. In a MEMS vibrating ring gyroscope, the dynamics and fundamentals of operation are centred around the Coriolis force. The vibrating ring gyroscope operates in a rotating reference frame. Its dynamics can be determined through the rotation induced Coriolis force acting on the ring observed in the inertial frame. The vibrating ring gyroscope dynamics regarding the inertial reference frame are shown in Figure 2. The complete derivation of the reference frame related to the vibrating ring resonator is presented in our previous paper.
The position vector related to the inertial reference is shown in the equation below.
By further solving and differentiating the above equation when the rotation comes into place, we can determine the acceleration of the inertial reference frame.
We will put equation 2 into Newton's second law of motion to find out the forces in the MEMS vibrating ring gyroscope.
where F is the force which is applied to the system, is the acceleration experienced by the system, is the acceleration that is experienced in the non-inertial reference frame, is the angular velocity, and is the Coriolis force of the gyroscope system.
2.1. Motion Equations of Internal Vibrating Ring Gyroscope
Let consider the dynamics of the complete MEMS internal vibrating ring gyroscope system, including externally placed semicircular support beams. The resonant structure of an internal ring gyroscope is schematically shown in Figure 3. The illustration shows eight spring-mass damping systems that contribute to the vibrating ring gyroscope system.
The internal ring structure connects eight semicircular support springs, and the vibrating structure is attached to the externally placed support anchors. The ring structure oscillates in identical pairs of mode vibrations. We will consider the identical elliptical mode of vibrations. Its dynamic representation is shown in Figure 4, with displacements occurring during oscillation.
The inplane displacement of the vibrating ring resonator is shown in Figure 4. Each small segment of the MEMS vibrating ring gyroscope system considers two degrees of freedom. When the excitation is provided on the driving axis, the ring resonator oscillates as an elliptical mode of vibrations along two orthogonal axes. When the rotation is applied on the Z-axis, the Coriolis force in the reaction is developed by the primary mode of vibration, and that Coriolis force transfers the identical elliptical mode at 45 degrees between the initially two orthogonally drive axes. The ring dynamic illustration is depicted in Figure 5.
When a ring oscillates in elliptical mode , it experiences radial and tangential displacements, as shown in Figure 4. The respective displacements are written as equations 4 and 5.
To find the equations of motion for the MEMS vibrating ring gyroscope, we will consider the Lagrange equation of motion.
Here is the kinetic energy, is the damping energy, is the strain energy, is the strain energy of the support springs, is the applied force to the gyroscope system.
2.1.1. Kinetic Energy of the System
To further evaluate the equations of motion, we first determine the system's kinetic energy. In addition to determine the absolute velocities from the absolute displacements of the gyroscope from the central axes. The ring displacements are described as equations 4 and 5. The kinetic energy of the ring resonator is written as follows.
where is the radius, is the cross-sectional area of the ring structure, is the density of the material. By solving equation 7, we further find the more simplified kinetic energy equation of the system as presented in equation 8. Here and are the general coordinates of the ring structure.
Equation 8 describes the kinetic energy equation of the ring resonator in accordance with the vibrating ring gyroscope. The respective equation accounted for the ring's rigid motion and its elliptical vibration modes.
2.1.2. Strain Energy of the Ring Structure System
The strain energy of the system is considered as the ring structure's elastic strain energy as represented by Hook's law. The elastic strain energy of the ring resonator is given as equation 9.
The cross-sectional view of the ring structure is shown in Figure 6. Where is the radius of the ring from the centreline, h is the height of the ring, t is the thickness of the ring, is the normal strain of the ring, and is the cross-sectional area of the ring. The normal strain of the ring structure is represented as equation 10.
Let consider in terms of the inextensionality of the ring makes at Equation 10 can be written as .
After solving the above equations, the ring's strain energy, which depicts elliptical oscillation modes, can be represented as equation 11.
2.1.3. Strain Energy of Support Springs
The strain energy for the support springs in the gyroscopic system is quite important as it completes the spring-mass damping system. This section discusses and derive the strain energy equation of support springs for a ring gyroscope. The size of the support springs is relatively small compared to the size of the ring, so we assume the kinetic energy of the support spring is negligible or zero.
To study the dynamics of the support springs, let consider the forces acting on the springs when it is in operation. The semicircular support spring experiences tangential and radial displacements due to normal and shear forces. Therefore, the tangential and radial stiffnesses for the semicircular support spring are needed to determine the motion equation of the MEMS vibrating ring gyroscope. The forces experienced by the support spring are explained in Figure 7.
To find out the tangential and radial stiffnesses of the support spring, the strain energy equation considered is written as equation 12.
Here is strain energy developed into the support spring due to the normal force and bending moment, is the stress, and is the strain developed due to the bending moment. The equation is further solved and written as equation 13.
Here is the Young's modulus, M is the bending moment experienced by the support spring, L is the length of the support spring, and is the moment of inertia.
The complete strain energy equation is derived in our previously published article [27]. The final strain energy equation for the semicircular support springs is given below. Here is the applied normal force.
The stiffness constant for the semicircular support spring is given as an equation 15. Where is the beam radius, is the width of the beam, and is the height of the beam.
Here is the stiffness constant for the semicircular support spring, and are tangential and radial stiffnesses of the semicircular support spring.
If the number of support springs increased, it will enhance the resonance frequency and stability of the ring oscillations. The equation 16 is the total strain energy developed by the support springs in the vibrating ring gyroscope. Where is the number of support springs, and represents the position of the support beams attached to the ring.
To get the more simplified strain energy equation 17, the equations 4 and 5 substitute into equation 16 for the total number of support springs in the gyroscope structure.
2.1.4. Damping Energy of the System
To design a MEMS vibrating ring gyroscope, the consideration of thermoelastic damping is quite important. This method involves thermal expansion and mechanical strain, which causes the energy to dissipate in the gyroscope. The selection of materials for the gyroscope is quite crucial as different materials exhibit different damping characteristics. The Rayleigh damping function also plays an important role in gyroscope performance. A comprehensive analysis of Rayleigh damping function reveals how the impact of geometrical dimensions and material properties affect the damping characteristics. Alongside structural and viscous damping characteristics, provide broader perspective in sensor applications.
The damping energy for MEMS vibrating ring gyroscope in the vacuum usually is thermoelastic damping. The Rayleigh damping function for the MEMS vibrating ring gyroscope is presented as equation 18. Note that the Rayleigh function equation here is only for identical modes of vibrations.
2.1.5. Electrostatic Energy of the System
The capacitive electrodes are designed to place around the ring structure. These electrodes are used for electrostatic actuation and capacitive detection in the gyroscope system. The electrodes make parallel plate capacitors with the ring resonator. These capacitive electrodes exert electrostatic forces on the ring resonator to oscillate the ring at the set resonance frequency. Therefore, ring structure acts as a parallel plate capacitor with the surrounded electrode. The voltages across the capacitors are labelled as outer voltage and inner voltage. The electrostatic energy of these parallel plate capacitors can be expressed as an equation 19.
where is the electrostatic energy of the system, is the permittivity of free space, is the permittivity of the gyroscope material, is the spacing between the two parallel plate electrodes, and is the differential capacitor area. The gap between the two parallel plate capacitors varies and depends on the nominal gap denoted as and the radial displacement .
Let substitute equation 20 into equation 19.
A differential capacitor area is composed of for the inner capacitor or for the outer capacitor, each having a different mean radius denoted as inner or outer. The electrodes are an integral part of the gyroscope and are placed by small circumferential gaps. The electrostatic energy stored in each part of the inner and outer capacitor is determined by integrating equation 22. The total electrostatic energy can be determined by the equation given below. Where is the area of the electrode.
The nonlinear electrostatic force can be determined by using the equation 24.
The linear electrostatic stiffness is different than the nonlinear electrostatic stiffness. The linear electrostatic stiffness can be determined as equation 25.
The total stiffness of the system is affected by the linear electrostatic forces applied by the outer and inner capacitors, resulting in a softening effect. The softening effect accelerates as the electrode voltages rise, and the gyroscope system total stiffness value becomes negative. This results in the instability of the gyroscope system if the voltage reaches a certain threshold. Several observations relevant to the nonlinear electrostatic force are described below.
In order to eliminate gyroscope coupling mechanisms, it is important to apply the electrode voltages so that . This will cause any even power terms in the generalized coordinates in equation 24 to cancel out.
The nonlinear electrostatic force expansion shows a softening or hardening effect in the gyroscope system. For example, hardening effects happen when .
Let consider Lagrange's equation to determine the motion equations for vibrating ring gyroscope.
Previously derived energy equations will be substituted into Lagrange's equation, and further simplifying the equations of motion. In a result, we have two equations of motion for the elliptical shape of resonant modes.
These equations are developed for the elliptical mode of vibrations for the MEMS vibrating ring gyroscope. Here, , are the mass, damping coefficient, and stiffness constant for the elliptical vibration mode. The coordinates are representing modes of vibrations for a ring gyroscope. Here is the applied base excitation force to the externally placed support anchors and is the nonlinear force that depends on the modal mass of the particular vibration mode.
2.2. Modelling of the Proposed Internal Vibrating Ring Gyroscopes
In this comprehensive finite element analysis (FEA), two designs of MEMS vibrating internal ring gyroscopes are selected and proposed. AnsysTM Workbench software was used for the FEA study. These gyroscopes are designed as a single layout for easy fabrication of silicon on the insulator (SOI) process. The SOI process is explained in our published conference proceedings [28]. The material properties, geometrical dimensions, and boundary conditions followed as per the SOI process.
This FEA study aims to evaluate the performance of the two proposed gyroscopes, including static and dynamic modelling of the vibrating ring gyroscopes. The initial analysis targets the electrostatic actuation effect on the gyroscope ring structure, then finds the modal resonance frequencies, and then a harmonic analysis of the ring gyroscope. The initial modal results provide a detailed analysis of the vibrational behavior of the vibrating ring gyroscopes, emphasizing the identical elliptical mode of vibrations. The modal analysis is important for guiding potential design improvements and further gyroscope efficiency and reliability. A critical modelling study on the harmonic analysis to understand the response amplitude of the vibrating ring gyroscope under two identical mode of resonance frequencies.
Furthermore, the simulation modelling of the vibrating ring gyroscope behavior in harsh environmental conditions was used to assess their stability and reliability. Particular attention is given to the mode matching of two resonance frequencies and temperature variations on the performance of the gyroscope. The simulation is quite important to assess the performance of the gyroscope, ensuring that drive and sense mode frequencies are optimally matched for higher sensitivity and accuracy. Temperature variation is another important factor for MEMS devices. MEMS gyroscopes can be sensitive to temperature variations, affecting their performance. Due to their symmetric design geometry, the MEMS vibrating ring gyroscope provides excellent results on temperature variation applications. The simulation includes various temperature ranges to evaluate the structure's thermal stability and other related mechanical properties.
2.2.1. Design Geometry
In modern-day smart devices, the precision of the device is integral, particularly in inertial sensing. Therefore, the design geometry of a MEMS vibrating ring gyroscope about preciseness and accuracy is quite important. Two designs were selected and proposed for the MEMS vibrating internal ring gyroscope. Semicircular support springs with externally placed anchors support the resonator ring structure. The particular ring radius is selected to achieve a targeted resonance frequency of around 50 kHz.
Design I: The Design I of the MEMS vibrating ring gyroscope is shown in Figure 8. The design can be identified by its eight semicircular support springs. Each measure 210 µm in radius and 10 µm in thickness. The gyroscope design has a ring radius of 1000 µm while maintaining a structure height of 100 µm and a ring thickness of 10 µm. The externally placed anchor supports are designed with dimensions of 80 µm by 80 µm to ensure stability and support the whole vibrating gyroscope structure.
The support springs are designed in a semicircular shape to maximize mechanical stability and efficiency in energy usage. The design emphasizes a balance between flexibility and simplicity by reducing the number of springs. The symmetrical design approach of the springs surrounding the central ring provides an even distribution of stress that is particularly advantageous in unwanted vibration applications. The symmetry of the structure ensures that the operational frequencies remain consistent even when exposed to different temperatures. The design parameters are listed in Table 1.
Design II: The Design II improves the gyroscope structure by incorporating sixteen semicircular support springs. Adding more support springs enhances the design capacity to withstand environmental changes, such as external vibration fluctuations due to various temperature ranges. The design features are the same as Design I, the only difference is the addition of more semicircular support springs. It also supports a central ring with a radius of 1000 µm, a height of 100 µm, and a thickness of 10 µm. The design II is shown in Figure 9.
Design II incorporates double the number of support springs compared to Design I. This results in a more uniform distribution of stresses. This is particularly important in conditions with significant fluctuations due to external vibrations and temperature changes. The symmetrical design configuration of the gyroscope ensures temperature changes are equally distributed, helps to maintain gyroscope accuracy, and prevents any mode mismatch in the resonant frequencies caused by thermal expansion or contraction. The design parameters for Design II are listed in Table 2.
2.2.2. Mesh Generation
The objective of the meshing is to create a mesh model that accurately represents the physical model of the complex design of a MEMS vibrating ring gyroscope. According to the desired resonance frequency and mode matching for harsh environments. It is a must that the mesh captures the high resolution of the gyroscope geometry, especially around the ring and semicircular support spring structures. The meshing approach was selected based on the vibrating ring gyroscope geometric complexities. In both Design I and Design II, the meshing procedure started by preparing the geometry model to eliminate minor imperfections that may affect the creation of the mesh. An important emphasis was placed on the ring and semicircular support spring structures that are crucial for ensuring the stability and performance of the gyroscope.
The mesh generation used a mixed approach of incorporating both tetrahedral and hexahedral elements to maximize the advantages offered by each element type [29]. Tetrahedral elements were used to mesh the ring resonator and semicircular support springs. They possess a complex curvature and require flexibility in the mesh structure. The tetrahedral mesh adapts to complex geometries and upholds a quality throughout the model. The externally placed anchor structures have a reasonably simple structure. The respective structure was divided into hexahedral elements to decrease the number of elements and improve the simulation performance.
Tetrahedral meshing was used for the ring and semicircular support springs because of the complex geometric features of the ring gyroscope. The patch-conforming tetrahedron mesher is used for high-quality geometries. The layered tetrahedrons allowed for adding multiple layers of elements to capture the boundary layer effects accurately.
Hexahedral meshing was used for the externally placed anchors where fewer elements were needed to run the simulation program effectively and efficiently. The swept meshes in hexagonal are used for the minimum mechanical energy usage, and the multizone feature is utilized for multiple regions in the anchor support.
2.2.3. Electrostatic Modelling
Electrostatic modelling is used to determine how a structure responds to a biased voltage static load. It is crucial for estimating the stiffness of a MEMS vibrating ring gyroscope's entire structure when exposed to electrostatic actuation and how the structure deflection reacts to the bias voltage. Consequently, a direct current voltage is applied to the ring resonator connected to the semicircular support springs. The deflection of the ring structure for Design I and Design II is in the x-direction as the DC voltage increases, as illustrated in Figure 10. The FEA model shows that Design I has a sudden shift of increase in the displacement value around 40 DC voltages, which shows a pull-in effect. Therefore, bias voltages should be lower than the 40 DC voltage. However, design II has a sharp increment of deflection of about 0.007 µm at 55 DC voltages, which shows Design II has a slightly higher cut-off bias voltages than Design I. In Design II, the sharp spike observed at 55 V can be explained by the electrostatic pull-in voltage, which is a well-known behavior in MEMS devices. The electrostatic pull-in voltage occurs when the applied voltage induces an electrostatic force that overcomes the mechanical restoring force of the system. This leads to a sudden increase in displacement or rotation of the MEMS structure. The magnitude of the displacement increases relatively with the increment of the DC voltages for both designs. There is a little discrepancy between the results of the FEA model for both designs, as after 40 DC voltages, there are high values of displacements for design II when the DC voltages increase. This FEA result assumes that the compliance of the ring mass and semicircular spring beams in that direction is insignificant. As illustrated in Figure 10, these factors marginally minimize the overall stiffness values.
2.2.4. Modal Analysis
The utilization of FEA modal analysis is of utmost importance in computational modelling analyses, particularly in determining vibration characteristics of mechanical structures such as the MEMS vibrating ring gyroscope. The present methodology comprehensively analyses the behavioural patterns and modal frequencies of the MEMS vibrating internal ring gyroscopes. The modal analysis is a powerful technique, which is used to gain details into the vibrational behaviour of structures. By discretising the gyroscope structure into smaller finite elements and solving the resulting equations, this analysis method allows for a comprehensive understanding of the vibrational modes and resonance frequencies of the system. This process can obtain a clear and detailed analysis of the vibrating ring gyroscope's vibrational characteristics. The modal analysis using the Finite Element Method (FEM) was performed by using Ansys software on both the internal ring gyroscope Designs I and II.
The modal analysis focuses on the two selected designs of vibrating internal ring gyroscopes. This aims to investigate and analyse various aspects of the internal ring gyroscope, including its structural integrity and overall performance. The initial modelling results of the MEMS vibrating internal ring gyroscope provided better mode matching and gyroscope performance parameters than the traditional external ring gyroscope.
The Design I consists of a total of eight semicircular beams, each of which is securely connected to the internal ring resonator. The entire vibrating structure is attached and supported by external anchors positioned to the vibrating structure. Design II has the same geometric characteristics. The only difference is the inclusion of more semicircular support springs, which totalled sixteen. The internal ring design strategy effectively employs isolation techniques to mitigate the impact of external vibrations on the vibrating ring structure. The design specifications encompass several key parameters. Firstly, the ring radius is set at 1000 µm, indicating the distance from the center of the structure to the outer edge of the ring.
Additionally, the radius of the semicircular support spring is established at 210 µm, signifying the distance from the center of the structure to the outer edge of the beam. Both the ring and support springs possess a thickness of 10 µm. Lastly, the structure's height is 30 µm, describing the vertical distance from the base to the top of the structure. The modal analysis results of the elliptical mode of vibrations are shown in Figure 11 for Design I, and in Figure 12 for Design II.
The frequencies obtained from the model for the internal ring design I, as depicted in Figure 11, are 48263 Hz and 48277 Hz for mode 1 and mode 2, respectively. The mode mismatch is recorded at 14 Hz. The internal ring design shows better mode matching results, which is crucial for high-performance devices.
The resonance frequencies resulting from the model for the internal ring design II, as shown in Figure 12, are 64476 Hz and 64482 Hz for mode 1 and mode 2, respectively. The mode mismatch for Design II is recorded only at 6 Hz. This shows that including more semicircular support springs increases the resonance frequency and minimizes the mode mismatch between two identical elliptical modes of vibrations.
2.2.5. Harmonic Analysis
The comprehensive analysis of the dynamic characteristics of the proposed MEMS vibrating internal ring gyroscopes should include a harmonic response analysis. This analysis investigates the frequency-dependent behaviour of the gyroscope and ultimately determines its mechanical sensitivity. The internal ring resonator is subjected to a harmonic force in the directions of the X and Y axes through the actuation voltage consisting of a DC voltage of 20V and an alternating current (AC) component of 0.5V. This actuation is achieved using driving electrodes placed inside of the ring resonator. The schematic representation of the electrode configuration with the internal ring gyroscope is shown in Figure 13.
The electrical design setup was demonstrated in [27], where the actuation equation was derived for the vibrating ring gyroscope.
It is observed that the AC voltage values are considerably smaller in comparison to the DC voltage. Consequently, the nonlinear effects arising from the electromechanical coupling can be disregarded, allowing for the execution of a prestressed harmonic analysis to examine the harmonic behaviour of the gyroscope. An initial static analysis is conducted using the applied direct current (DC) voltage following the experimental procedure. This is followed by a comprehensive harmonic analysis, considering the pre-existing stress conditions and utilizing the applied alternating current (AC) excitation.
The frequency responses of the ring structure in the drive and sense direction for Design I are presented in terms of amplitude in Figure 14. The modal analysis for Design I showed two resonance frequencies of elliptical modes at 48263 Hz and 48277 Hz, respectively. In the context of harmonic response, the first peak value of driving resonance frequency at 48263 Hz with an amplitude of 0.05 µm and the second one at 48277 Hz with a very small amplitude. On the other hand, in sensing resonance frequency, the highest peak value observed at 48263 Hz is primarily selected for the driving resonance frequency, and the second peak is observed at 48277 Hz with an amplitude of 0.01 µm. The sensing resonance shows a lower peak amplitude, which shows the gyroscope system response to sensing is less pronounced than driving vibrations at the resonant frequency.
For Design II with its sixteen semicircular support springs, the harmonic response of the ring structure is presented as the amplitude in Figure 15. These responses are presented in the drive and sense direction. The modal analysis was conducted for Design II in the presence of two identical elliptical modes of resonance frequencies. These frequencies were observed at higher values of 64476 Hz and 64482 Hz, respectively. In harmonic response analysis, it is observed that the highest peak value of the driving resonance frequency occurs at 64482 Hz, exhibiting a higher amplitude of 0.21 µm. Subsequently, a lower peak in driving resonance frequency is observed at 64476 Hz with an amplitude of less than 0.04 µm. In sensing resonance frequency, it is important to notice that the highest peak value recorded was observed at a frequency of 64476 Hz. This frequency is predominantly chosen as the sensing resonance frequency. The second peak of sensing resonance was observed at a slightly higher frequency of 64482 Hz with an amplitude of 0.01 µm. The peak values in Design II are sharper and more pronounced, especially in driving resonance frequency, which reaches a higher amplitude than Design I.
Including more semicircular support springs contributes to a more refined separation between driving and sensing resonance frequencies. This is quite important for the vibrating ring gyroscope's ability to detect rotation without interference from other sources of vibration. The sharp peaks in both designs indicate that the gyroscope system possesses high Q factors. The amplitude outside the resonant peaks is minimal and can easily be filtered out for higher performance.
2.3. Harsh Conditions
The advancement of MEMS technology has significantly revolutionized the field of inertial sensors. MEMS vibrating ring gyroscopes have emerged as an integral part of inertial measurement units (IMU) for various applications. These gyroscopes are highly suitable for advanced integration into various smart devices. The increasing demand for these inertial sensors in various harsh conditions significantly challenges their reliability and performance. The reliability of MEMS gyroscopes heavily depends on their ability to maintain the highest levels of accuracy and durability, particularly when exposed to harsh conditions such as extreme temperatures. These conditions can cause many reliability issues, including problems with material degradation and electronic malfunction.
This section emphasizes the mode matching and temperature analysis to analyse the MEMS vibrating ring gyroscope performance in harsh conditions. Mode matching is a fundamental technique to synchronize the driving and sensing resonant frequencies to achieve the optimal performance of the gyroscope. The impact of temperature fluctuation is quite important. The temperature fluctuations develop thermal stresses and strains in the gyroscope which further affect the performance. The degradation of the material and mode mismatching effect due to temperature variations are investigated in this section.
2.3.1. Temperature Analysis
The most critical challenge in designing MEMS vibrating ring gyroscopes is the variability of the gyroscope performance parameters due to environmental changes and fabrication imperfections. These issues can lead to a mismatch in the two operating resonance frequencies. This results in a discrepancy between the frequencies of the drive and sense modes. The mode mismatching can be minimized by prefabrication design geometry modifications and electrostatically by tuning electrodes. This section presents a design modelling analysis to counteract fluctuations in device operating temperature. It specifically highlights the enhancements in performance achieved through two closely operating resonance frequencies. Ensuring performance stability is important in the field of MEMS gyroscopes. As discussed earlier, even minor discrepancies between the drive and sense modes resonance frequencies lead to significant inaccuracies in the output signal gain. Temperature fluctuations can potentially induce changes in the resonant frequency of the drive and sense mode in MEMS vibrating ring gyroscopes, thereby impacting their overall performance. Therefore, it is essential to consider the impact of thermal fluctuations on the performance evaluation of the MEMS vibrating ring gyroscope. Temperature fluctuations can lead to alterations in Young's modulus, thermal expansion or contraction, and thermally induced stresses. These changes can affect the stiffness matrix, resulting in variations in the resonant frequency values and a decline in the performance of the device. The modelling and simulation of the thermal-induced effects on the behaviour of the proposed MEMS vibrating ring gyroscopes are presented below.
Material Degradation: The proposed MEMS vibrating ring gyroscopes were designed to utilise the simple silicon-on-insulator (SOI) microfabrication process, which involves using silicon as the primary material for the structure. Temperature fluctuation has an impact on the properties of silicon, especially its elastic properties. Variations in the resonance frequency of the MEMS gyroscope can occur due to the temperature fluctuations that bring changes in Young's modulus of silicon material. The equation that describes the influence of temperature on Young's modulus of silicon is given below as equation 30 [30].
Here, represents the Young's modulus at absolute zero temperature. refers to the temperature. and are constants that rely on the Grueneisen parameter, Debye temperature, Anderson-Grueneisen parameter, and material volume at 0K. The calculated values for and of silicon material are 15.8 MPa and 317 K, respectively [30]. The Young's modulus value of silicon for the temperature range of -100°C to 100°C, relevant to the proposed MEMS vibrating ring gyroscope, is shown in Figure 16. The results indicate that the temperature variation has a negligible impact on Young's modulus and stiffness variation for the MEMS vibrating ring gyroscope within the specified operating temperature range.
Thermal Impact on MEMS Vibrating Internal Ring Gyroscopes: Temperature variations within the gyroscope device can cause expansion and contraction in the microstructure in addition to changes in the material properties. Thermal deformation in the MEMS vibrating ring gyroscopes can cause changes in the gap spacing between the ring structure and capacitive electrode. Furthermore, temperature variations may lead to thermal stresses and change the dimensions of the support springs and the whole gyroscope structure. A FEA model is used to conduct a thermal analysis to accurately measure the changes in resonant frequency caused by thermal deformation and thermally induced stresses for the proposed Design I and II vibrating internal ring gyroscopes. The gyroscopes are intended to operate within a temperature range of -100°C to 100°C. Initially, a uniform temperature T is assigned to all structural elements, ranging from -100°C to 100°C. A static analysis is performed with prestress effects enabled, considering the ambient temperature T = 22 °C as the reference temperature.
The distributed thermal stresses resulting from the FEA model-based static analysis are shown in Figure 17a,b for Design I and in Figure 18a,b for Design II. These stresses are induced by thermal effects and are observed at temperatures of -100°C and 100°C, respectively. A notable accumulation of thermal stresses is observed in the vicinity of the semicircular support springs attached to the externally placed anchors. Conversely, minimal thermal stresses are observed in the ring and the remaining semicircular support springs portions of the structure.
Similarly, the distributed thermal strains resulting from the FEA model are shown in Figure 19a,b for Design I and in Figure 20a,b for Design II. These strains are induced by thermal effects and are observed at temperatures of -100°C and 100°C, respectively. The distributed strains are observed mainly around the semicircular support springs attached to the externally placed anchors. However, minimal thermal strains are observed in the ring and the remaining semicircular support springs area of the structure.
The thermal analysis modelling results clearly show that Design II is more robust than Design I. The thermal results indicate that the resonant frequency shift in both the drive and sense modes is expected to exhibit variations in response to fluctuations in environmental temperature. However, the symmetric design structure of the vibrating ring gyroscope can cause uniform shifts in both the resonant frequencies. The findings of the maximum value of thermal stresses resulting from temperature fluctuations ranging from -100°C to 100°C are presented in Figure 21 for both Designs I and II. The observed values increase when the magnitude of the temperature differential is greater to the ambient room temperature.
The thermal strain result is presented in Figure 22. The results indicate a linear relationship between thermal strain and temperature changes for both designs. However, Design II exhibits a higher strain value than Design I. The strain results also affect the shift of the resonant frequencies uniformly.
The thermal deformations to the reference temperature of 22°C have been modelled within the temperature range of -100°C to 100°C. The thermal deformation results at -100°C and 100°C are illustrated in Figure 23 and Figure 24 for Design I and Design II, respectively. In Figure 23, the structural components of the ring and semicircular springs experience contraction due to thermal deformation occurring at a temperature of -100°C in Design I. This contraction reaches a peak value of 0.38 μm. On the other hand, when the temperature reaches 100°C, the vibrating structures including ring and semicircular support springs undergo expansion. The ring and spring structure exhibit a maximum deformation of 0.24 μm. In Figure 24, the ring and semicircular springs structural components experience contraction up to 0.41 μm at a temperature of -100°C in Design II. When the temperature reaches a peak of 100°C, the ring and semicircular support spring structure undergoes expansion up to 0.27 μm.
The thermal deformation results show both designs have a uniformly distributed deformation across the ring and semicircular support spring structure. The temperature range is quite wide from -100°C to 100°C. Furthermore, Figure 25 confirms a linear relationship between the deformation and the temperature changes for the MEMS vibrating ring gyroscope due to its symmetric design nature. The thermal deformation value increases when the temperature difference is greater than the room temperature.
2.3.2. Mode Matching
Mode matching is an essential parameter in MEMS vibrating ring gyroscopes for optimal and higher performances. This includes matching the resonance frequencies of the driving and sensing modes. To achieve mode matching prior to fabrication, include the precision required in microfabrication procedures plus predesign modification modelling. Variations in the gyroscope structural dimensions are frequently caused by microfabrication errors such as sidewall angle and critical dimension losses. These errors cause a frequency split between these modes. Overcoming this error requires improved prefabrication procedures, design feature variation research, and the use of automatic control systems. Tuning electrodes are also essential for adjusting the mode mismatch of the resonance frequencies. The temperature fluctuations also contribute to the mode mismatch.
It has been observed that temperature fluctuations significantly affect the performance of MEMS gyroscopes. The thermal deformations and stresses developed from these temperature-induced variations occur within the ring and support spring structures. As a result, modifications are introduced to the drive and sense mode frequencies. Based on the elevated thermal deformations and stresses detected in the ring and support springs, it is rational to expect temperature operating variations to have a more pronounced effect on the resonant frequency. To find out the mode mismatch between the two identical elliptical modes of vibrations in both designs. A parametric study has been done to observe the thermal effect on the mode matching. The resonance frequency drop can be observed in Figure 26 for Design I, showing a linear drop from -100°C to 100°C. The mismatch between the resonant frequencies is roughly 15 Hz. At room temperature 22°C, the resonance frequencies of elliptical mode 1 and mode 2 were observed at 48263 Hz and 48277 Hz, respectively.
Design II modelled with pre-thermal analysis to analyse the two identical elliptical modal frequencies against the temperature range from -100°C to 100°C. The obtained result is shown in Figure 27. The respective modal frequencies consistently change with the temperature changes. At 22°C, the elliptical modal frequencies mode 1 and mode 2 were observed at 64476 Hz and 64482 Hz, respectively. The mode mismatch between modal frequencies is observed at 6 Hz, which shows a better result than Design I.
To compare the mode mismatch for both the MEMS vibrating internal ring gyroscope designs, Design I shows a higher mode mismatch value. The mode mismatch value is around 14 Hz, as shown in Figure 28. On the other hand, Design II shows a low mode mismatch value of roughly 6 Hz, as seen in Figure 29. The mode mismatch value is almost consistent for Design II. It clearly shows that Design II has a low mode mismatch value and higher resonance frequencies than Design I.
The modelling results of the temperature analysis and effect of mode mismatching were analysed on two designs of MEMS vibrating internal ring gyroscopes, Design I and Design II. Both designs have the same design features; the only difference is that Design II has more semicircular support springs than Design I. In Design II, the semicircular springs were placed as an opposite pair, and a total of sixteen support springs were used. Adding more springs increases the desired elliptical modes resonance frequencies to more than 60 kHz. The increased resonance frequency and placement of more springs outside of the ring resonator made the gyroscope more stable when exposed to harsh conditions. The thermal stress distribution in ring resonator and semicircular springs is higher in Design II than in Design I. This suggests that Design II has more vibrating structures than Design I, which increases the thermal stresses and strains in Design II. However, the thermal deformations are approximately the same in both designs. The results show that Design II performs better than Design I when experiencing harsh conditions. The mode mismatch results obtained in Design II are significantly less. The mode mismatch value remains the same around 6 Hz within the temperature range from -100°C to 100°C. Design I show a mode mismatch value of around 14 Hz, which is more than double that of Design II. However, both vibrating internal ring gyroscope designs show a lower mode mismatch value than the traditional external ring gyroscope, which resulted in 31 Hz, as modelled in [27]. The comparison results for mode matching of two internal vibrating ring gyroscopes and an external ring gyroscope are shown in Table 3.
3. Conclusion
We have successfully investigated the design and modelling of two MEMS vibrating internal ring gyroscopes in consideration of the harsh environmental conditions. The paper demonstrated the performance enhancement of the gyroscopes' sensitivity, precision, and thermal stability through innovative design modifications.
The comprehensive analysis of the two proposed designs, Design I with eight semicircular support springs and Design II with sixteen semicircular support presented the key details as listed below.
Enhanced Mode Matching: Design II achieved significantly better mode matching with a mode mismatch of only 6 Hz as compared to 14 Hz in Design I.
Thermal Stability: The thermal analysis demonstrated that Design II offers better performance under extreme temperature conditions. Design II shows more uniform thermal stress and strain distribution throughout the structure. It is essential for maintaining consistent performance in harsh environments.
Higher Resonance Frequencies: Design II exhibited higher resonance frequencies approximately 64 kHz than Design I approximately 48 kHz. This indicates improved dynamic performance and robustness against external vibrations and temperature fluctuations.
Electrostatic and Harmonic Analysis: Both designs were subjected to electrostatic and harmonic analyses to evaluate their behaviour under varying DC voltages and harsh temperature conditions. Design II showed higher cut-off bias voltages and more pronounced peak amplitudes in harmonic response analysis.
These research findings suggest that the MEMS vibrating internal ring gyroscope with additional support springs Design II is more suitable for harsh conditions such as high-temperature applications. The improved mode matching, thermal stability, and higher resonance frequencies make Design II a better option for advanced inertial measurement systems. Future research will focus on further design optimization and fabrication processes to characterize the proposed Design II for challenging conditions.
Supplementary Materials
The following supporting information can be downloaded at the website of this paper posted on Preprints.org.
Author Contributions
The conceptualization was given by W.A.G. All the analyses, research, and construction of the figures were conducted by W.A.G. Writing: the manuscript was written by W.A.G. Writing (review and editing): the final manuscript was revised by I.H., I.M., and K.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this article is available on request from the corresponding author.
Acknowledgments
The authors gratefully acknowledge the Australian Government Research Training Program Scholarship for Waqas Amin Gill’s study at Curtin University, Australia.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hossain N, Al Mahmud MZ, Hossain A, Rahman MK, Islam MS, Tasnim R, et al. Advances of Materials Science in MEMS Applications: A Review. Results in Engineering. 2024:102115.
- Wang H, Ru B, Miao X, Gao Q, Habib M, Liu L, et al. MEMS devices-based hand gesture recognition via wearable computing. Micromachines. 2023;14(5):947.
- Ren X, Zhou X, Yu S, Wu X, Xiao D. Frequency-modulated mems gyroscopes: A review. IEEE Sensors J. 2021;21(23):26426-46.
- Senkal D, Shkel AM. Whole-angle MEMS gyroscopes: challenges and opportunities. 2020.
- Barbour, NM. Inertial navigation sensors. NATO RTO Lecture Series, RTO-EN-SET-116, Low-Cost Navigation Sensors and Integration Technology. 2010.
- Miller LM, editor MEMS for space applications. Design, Test, and Microfabrication of MEMS and MOEMS; 1999: SPIE.
- Gill WA, Ali D, An BH, Syed WU, Saeed N, Al-shaibah M, et al. MEMS multi-vibrating ring gyroscope for space applications. Microsyst Technol. 2020;26(8):2527-33.
- Ayazi F, Najafi K. A HARPSS polysilicon vibrating ring gyroscope. J Microelectromech Syst. 2001;10(2):169-79.
- Cao H, Liu Y, Kou Z, Zhang Y, Shao X, Gao J, et al. Design, fabrication and experiment of double U-beam MEMS vibration ring gyroscope. 2019;10(3):186.
- Gallacher BJ, Hedley J, Burdess JS, Harris AJ, Rickard A, King DO. Electrostatic correction of structural imperfections present in a microring gyroscope. J Microelectromech Syst. 2005;14(2):221-34.
- Bashir U, Bazaz SA, Saleem MM, Shakoor RI, Tariq MO, Kumar P. Design and analysis of mode-matched decoupled mass MEMS gyroscope with improved thermal stability. Measurement Science and Technology. 2024;35(8):086319.
- Zhang H, Chen W, Yin L, Fu Q. An Interface ASIC Design of MEMS Gyroscope with Analog Closed Loop Driving. Sensors. 2023;23(5):2615.
- Guohong H, Najafi K, editors. A single-crystal silicon vibrating ring gyroscope. Technical Digest MEMS 2002 IEEE International Conference Fifteenth IEEE International Conference on Micro Electro Mechanical Systems; 2002. Las Vegas, NV, USA: IEEE.
- Hyun An B, Gill WA, Lee JS, Han S, Chang HK, Chatterjee AN, et al. Micro-electromechanical vibrating ring gyroscope with structural mode-matching in (100) silicon. sens lett. 2018;16(7):548-51.
- Passaro VM, Cuccovillo A, Vaiani L, De Carlo M, Campanella CE. Gyroscope technology and applications: A review in the industrial perspective. Sensors. 2017;17(10):2284.
- Liang F, Liang D-D, Qian Y-J. Dynamical analysis of an improved MEMS ring gyroscope encircled by piezoelectric film. International Journal of Mechanical Sciences. 2020;187:105915.
- Khan I, Ranji AR, Nagesh G, Ting DS-K, Ahamed MJ. Design and Demonstration of a Microelectromechanical System Single-Ring Resonator with Inner Ring-Shaped Spring Supports for Inertial Sensors. Sensors. 2023;23(22):9234.
- Jia J, Ding X, Qin Z, Ruan Z, Li W, Liu X, et al. Overview and analysis of MEMS Coriolis vibratory ring gyroscope. Measurement. 2021;182:109704.
- Yoon SW, Lee S, Najafi K. Vibration sensitivity analysis of MEMS vibratory ring gyroscopes. Sensors and Actuators A: Physical. 2011;171(2):163-77.
- Ghisi A, Mariani S. Effect of imperfections due to material heterogeneity on the offset of polysilicon MEMS structures. Sensors. 2019;19(15):3256.
- Li Z, Gao S, Jin L, Liu H, Niu S. Micromachined vibrating ring gyroscope architecture with high-linearity, low quadrature error and improved mode ordering. Sensors. 2020;20(15):4327.
- Guan Y, Gao S, Liu H, Jin L, Niu S. Design and Vibration Sensitivity Analysis of a MEMS Tuning Fork Gyroscope with an Anchored Diamond Coupling Mechanism. Sensors. 2016;16(4):468.
- Gill WA, Howard I, Mazhar I, McKee K. A review of MEMS vibrating gyroscopes and their reliability issues in harsh environments. Sensors. 2022;22(19):7405.
- Shea HR, editor Reliability of MEMS for space applications. Reliability, Packaging, Testing, and Characterization of MEMS/MOEMS V; 2006: SPIE.
- Xu P, Si C, He Y, Wei Z, Jia L, Han G, et al. A novel high-Q dual-mass MEMS tuning fork gyroscope based on 3D wafer-level packaging. Sensors. 2021;21(19):6428.
- Li R, Wang X, Yan K, Chen Z, Ma Z, Wang X, et al. Interactive Errors Analysis and Scale Factor Nonlinearity Reduction Methods for Lissajous Frequency Modulated MEMS Gyroscope. Sensors. 2023;23(24):9701.
- Gill WA, Howard I, Mazhar I, McKee K. Design and Considerations: Microelectromechanical System (MEMS) Vibrating Ring Resonator Gyroscopes. Designs. 2023;7(5):106.
- Gill WA, Howard I, Mazhar I, McKee K. Simulation-Based Design and Analysis for MEMS Vibrating Ring Gyroscope. Engineering Proceedings. 2023;56(1):3.
- ANSYS, I. ANSYS Meshing User's Guide. ANSYS I, editor2023 2023.
- Wachtman JB, Tefft WE, Lam DG, Apstein CS. Exponential Temperature Dependence of Young's Modulus for Several Oxides. Physical Review. 1961;122(6):1754-9.
Figure 1.
A schematic illustration of a dynamic system of a MEMS vibrating ring gyroscope.
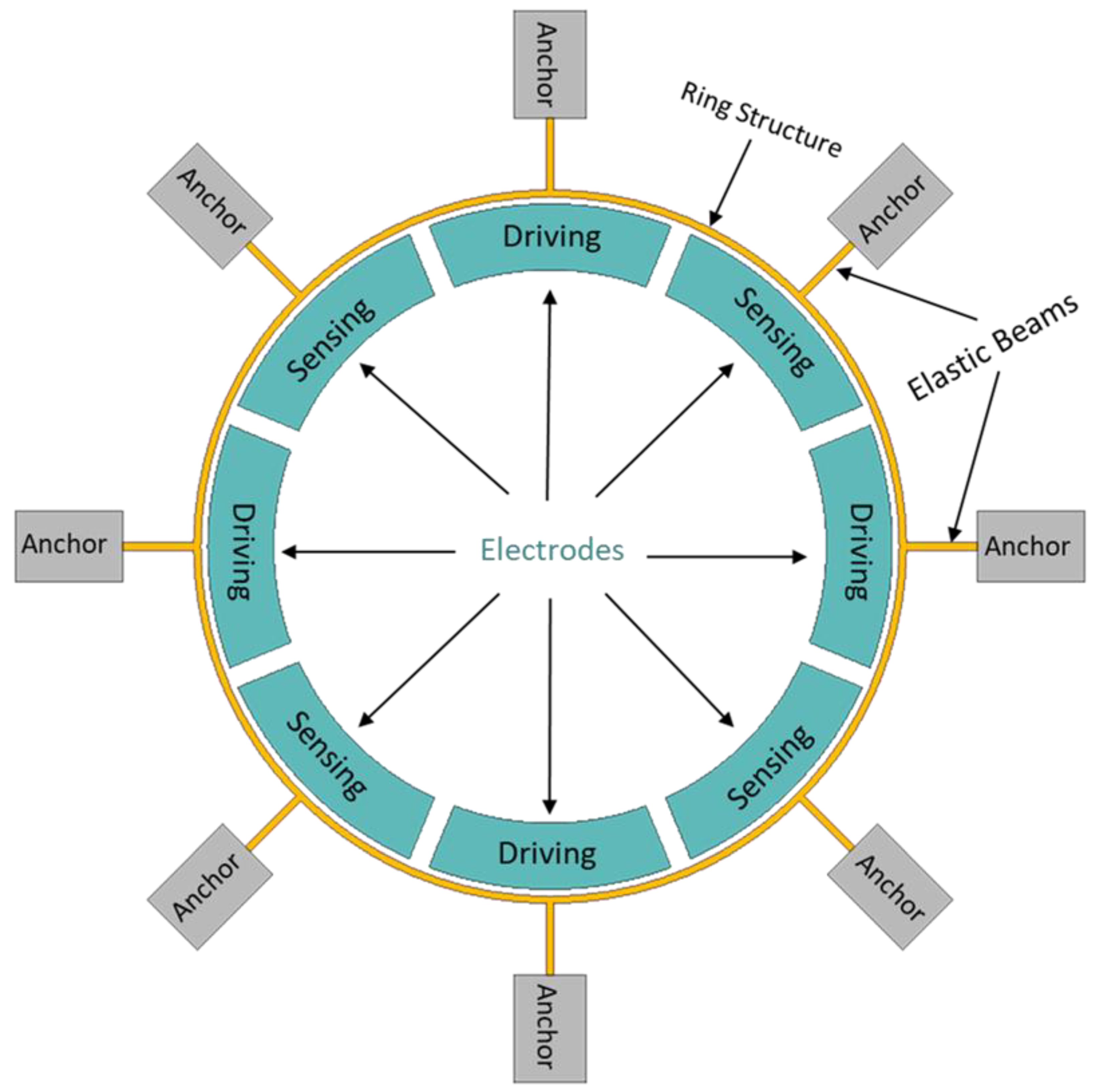
Figure 2.
An illustration of the reference frames in terms of a ring resonator.
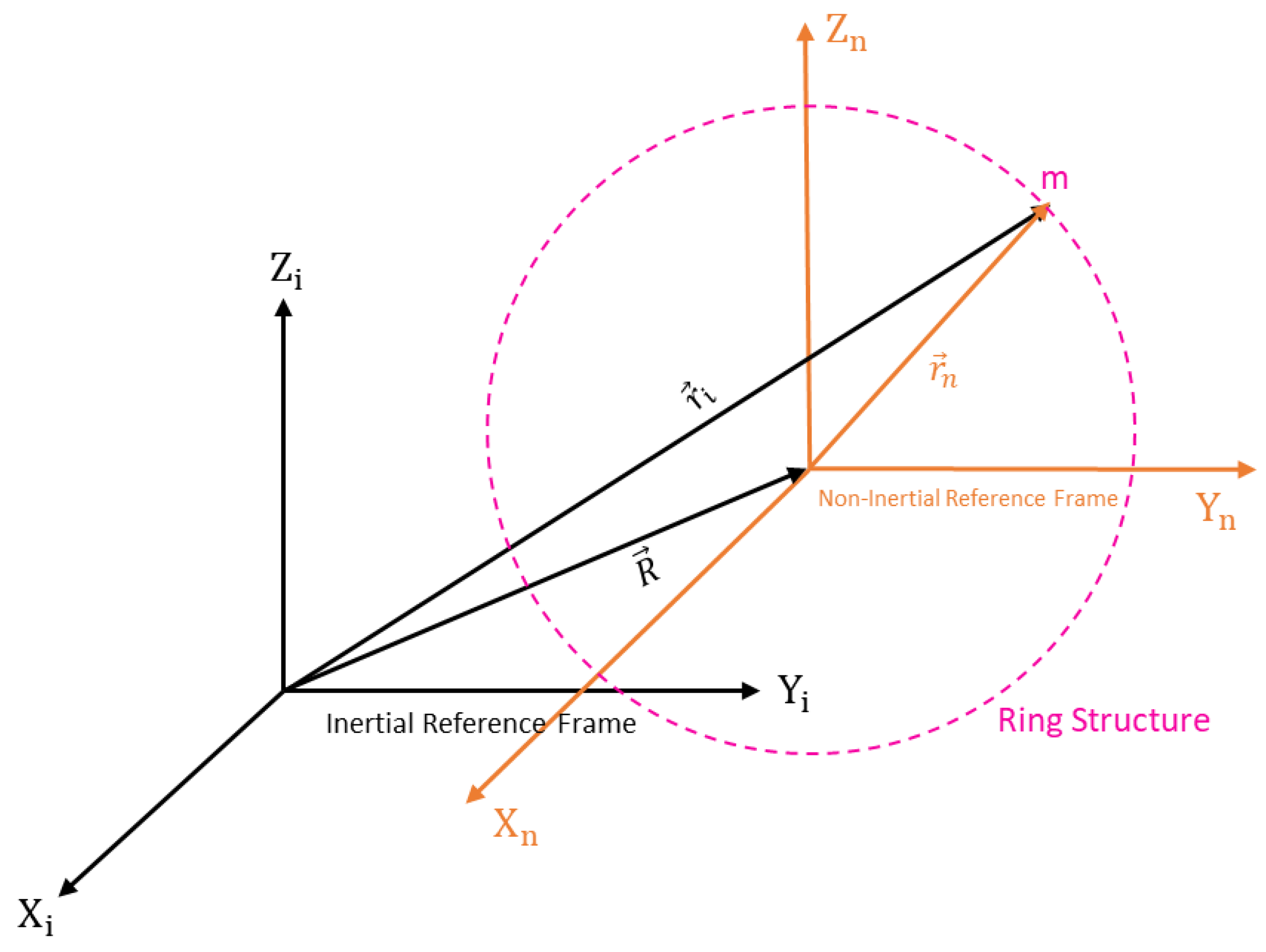
Figure 3.
A resonant structure model for MEMS internal ring gyroscope.
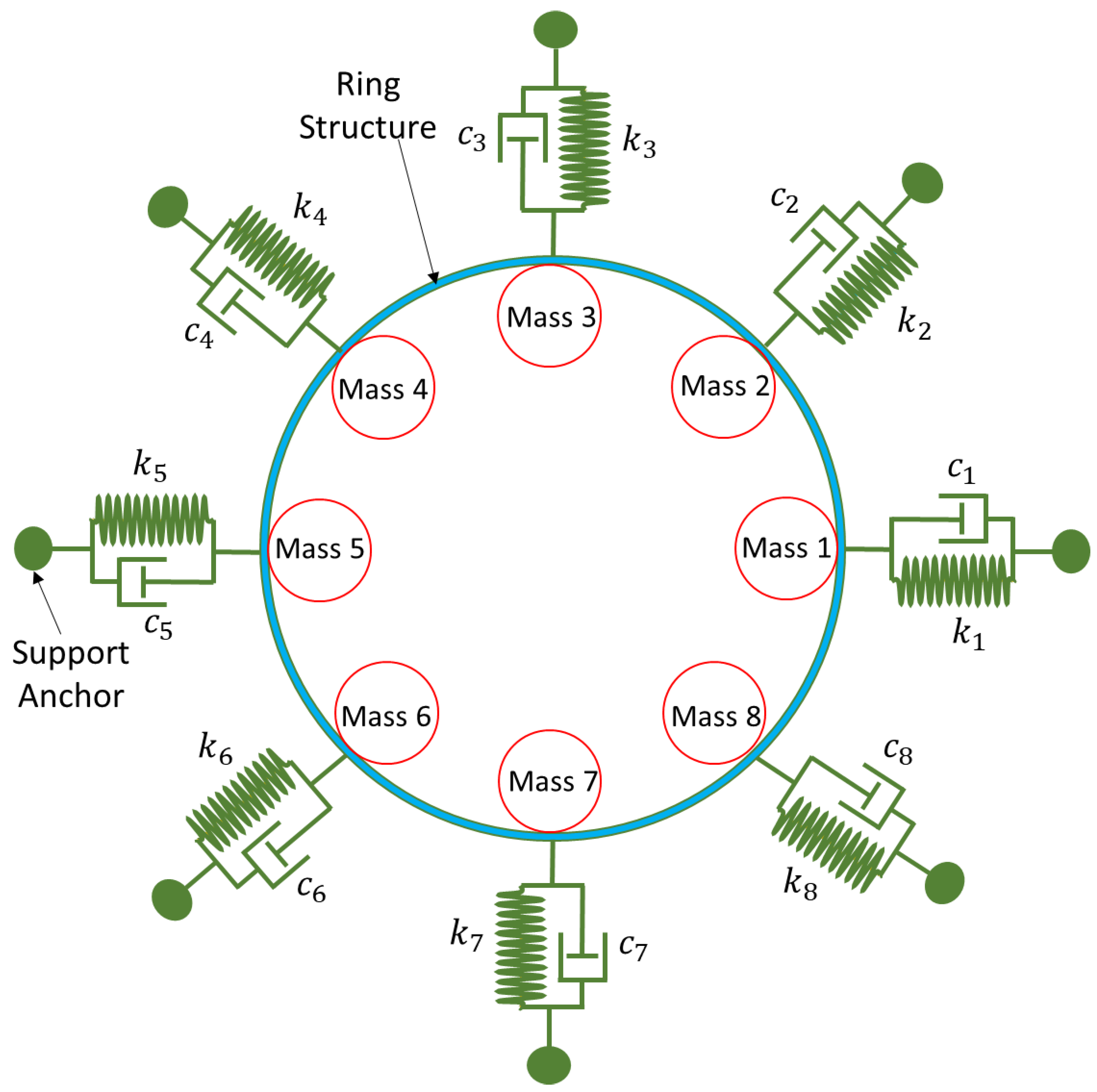
Figure 4.
An elliptical mode of vibration for a ring resonator and displacement illustration.
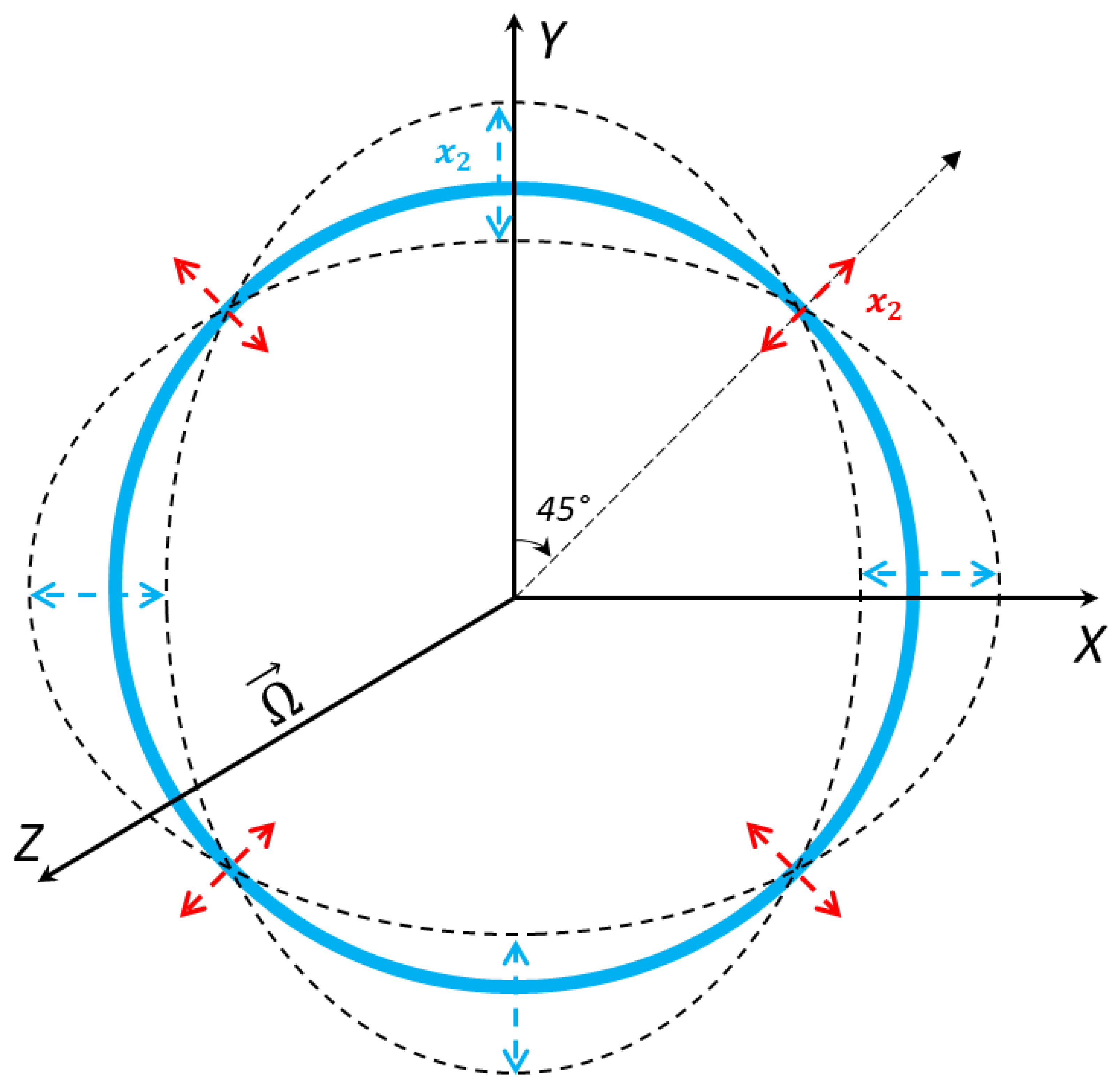
Figure 5.
Driving and sensing mechanism of a ring resonator.

Figure 6.
The cross-sectional view of the ring structure with centreline radius R and other parameters.
Figure 6.
The cross-sectional view of the ring structure with centreline radius R and other parameters.
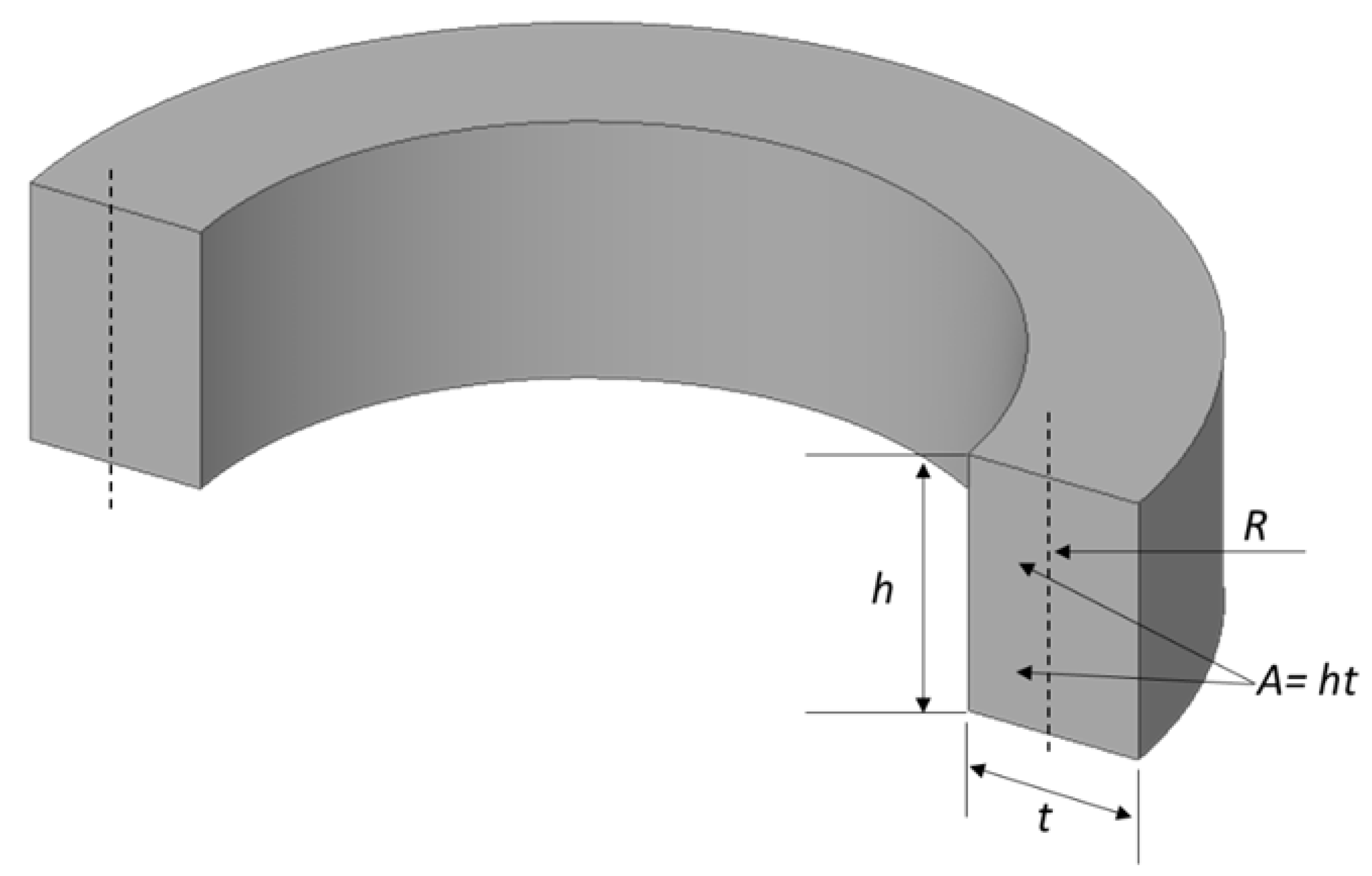
Figure 7.
An illustration of forces reactions on the semicircular support springs.
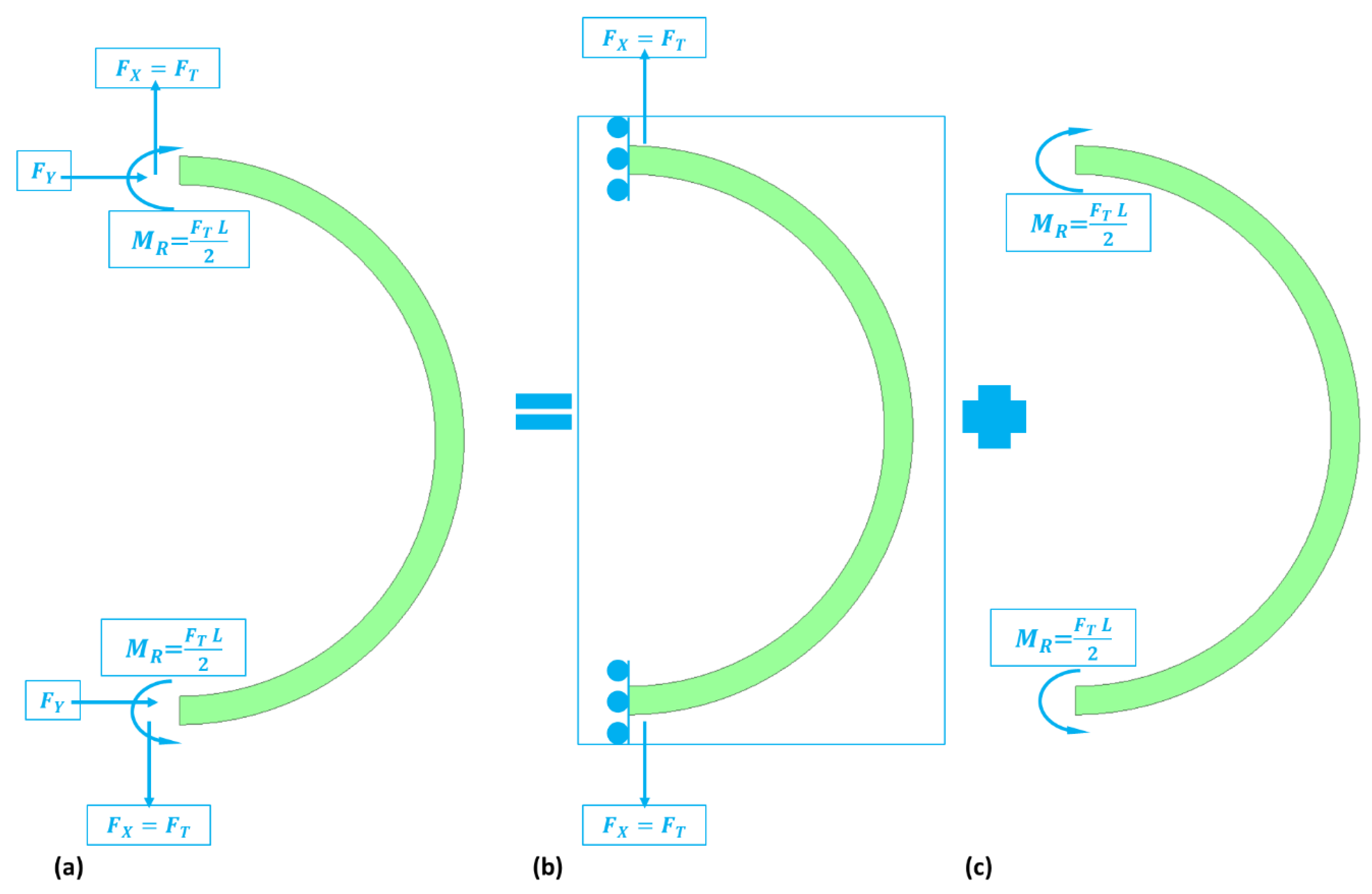
Figure 8.
Design I: MEMS vibrating internal ring gyroscope with eight semicircular support springs.
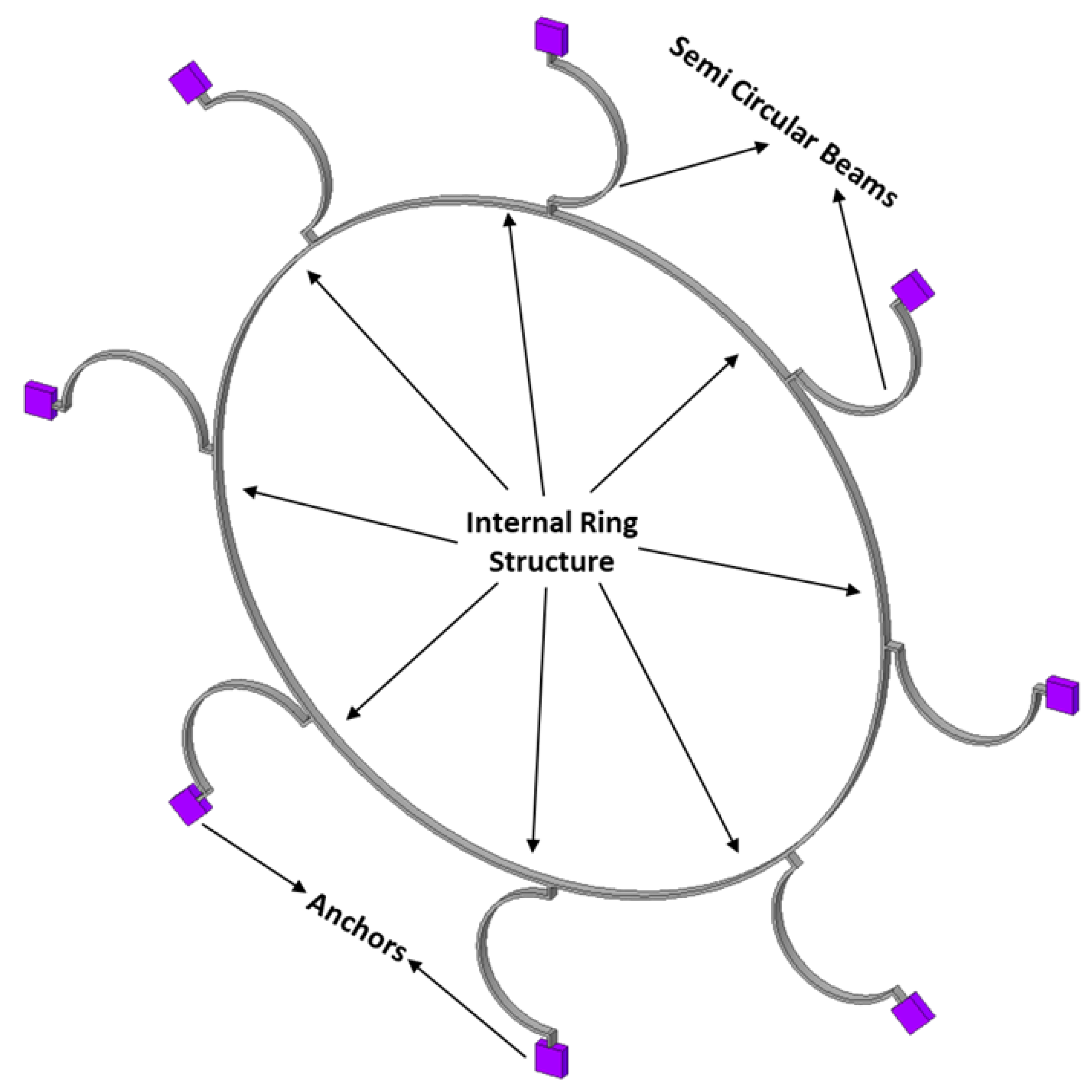
Figure 9.
Design II: MEMS vibrating internal ring gyroscope with sixteen semicircular support springs.
Figure 9.
Design II: MEMS vibrating internal ring gyroscope with sixteen semicircular support springs.
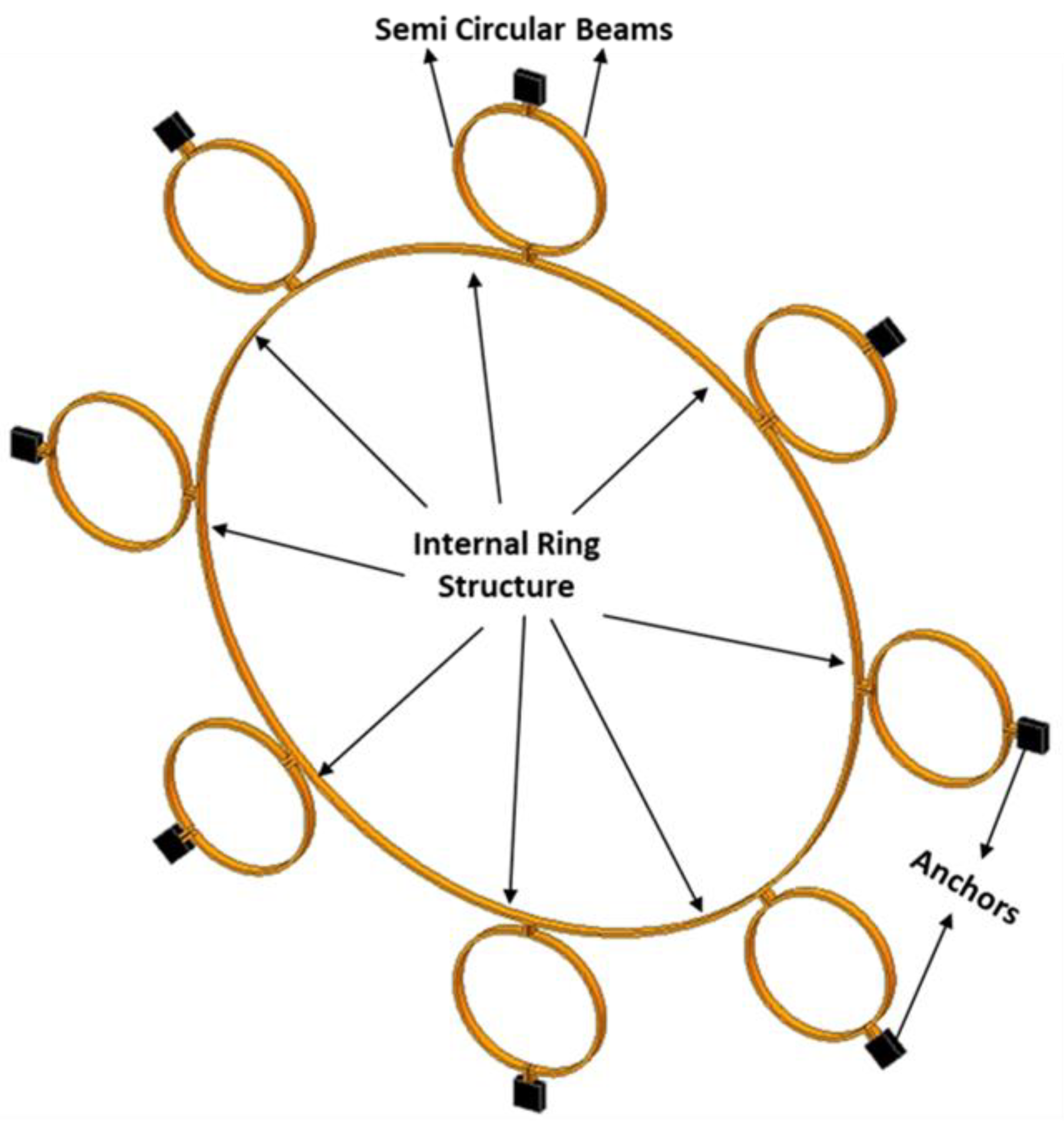
Figure 10.
Electrostatic actuation modelling results for MEMS vibrating internal ring gyroscope for Design I and Design II.
Figure 10.
Electrostatic actuation modelling results for MEMS vibrating internal ring gyroscope for Design I and Design II.
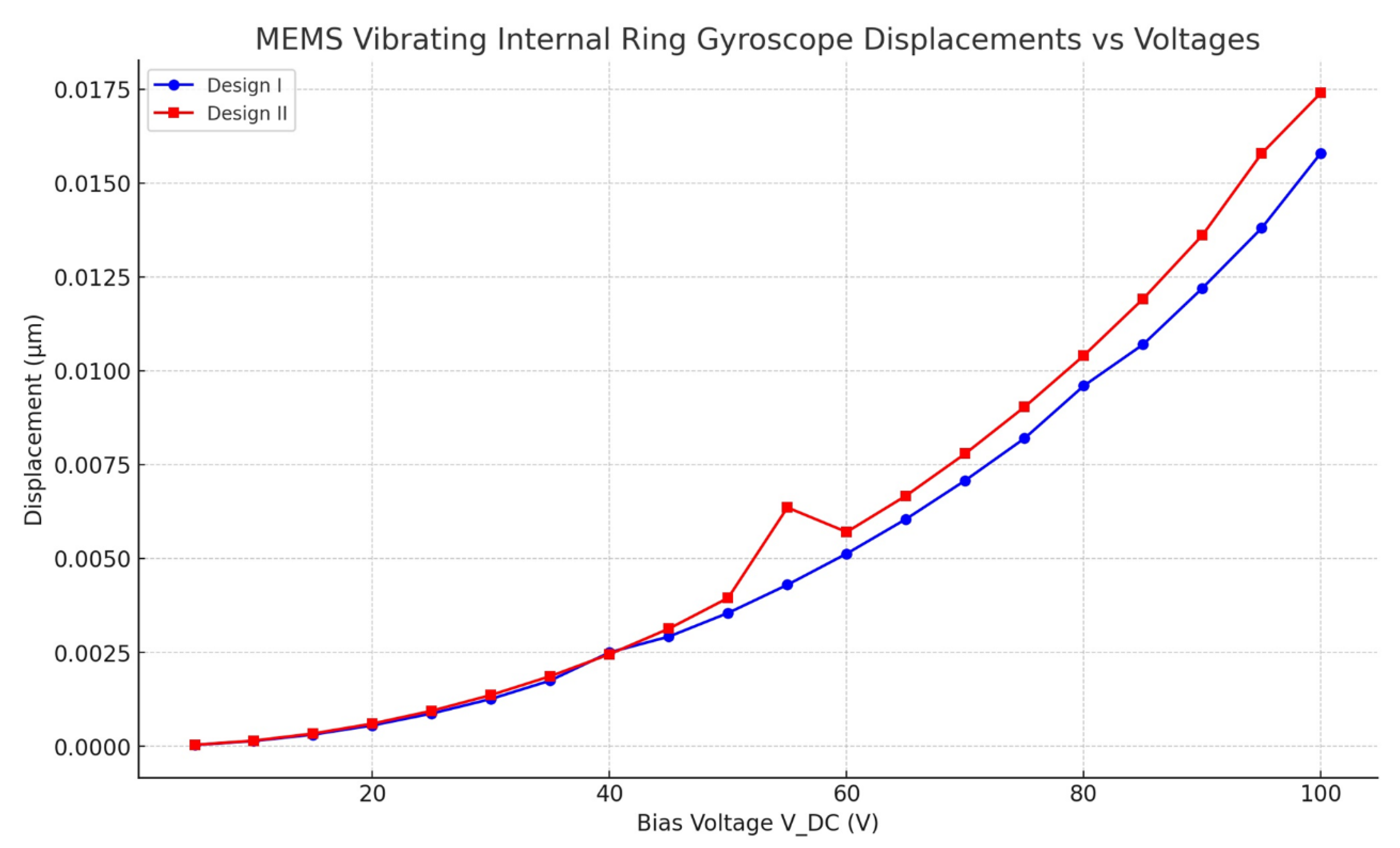
Figure 11.
The FEA modal analysis for Design I.
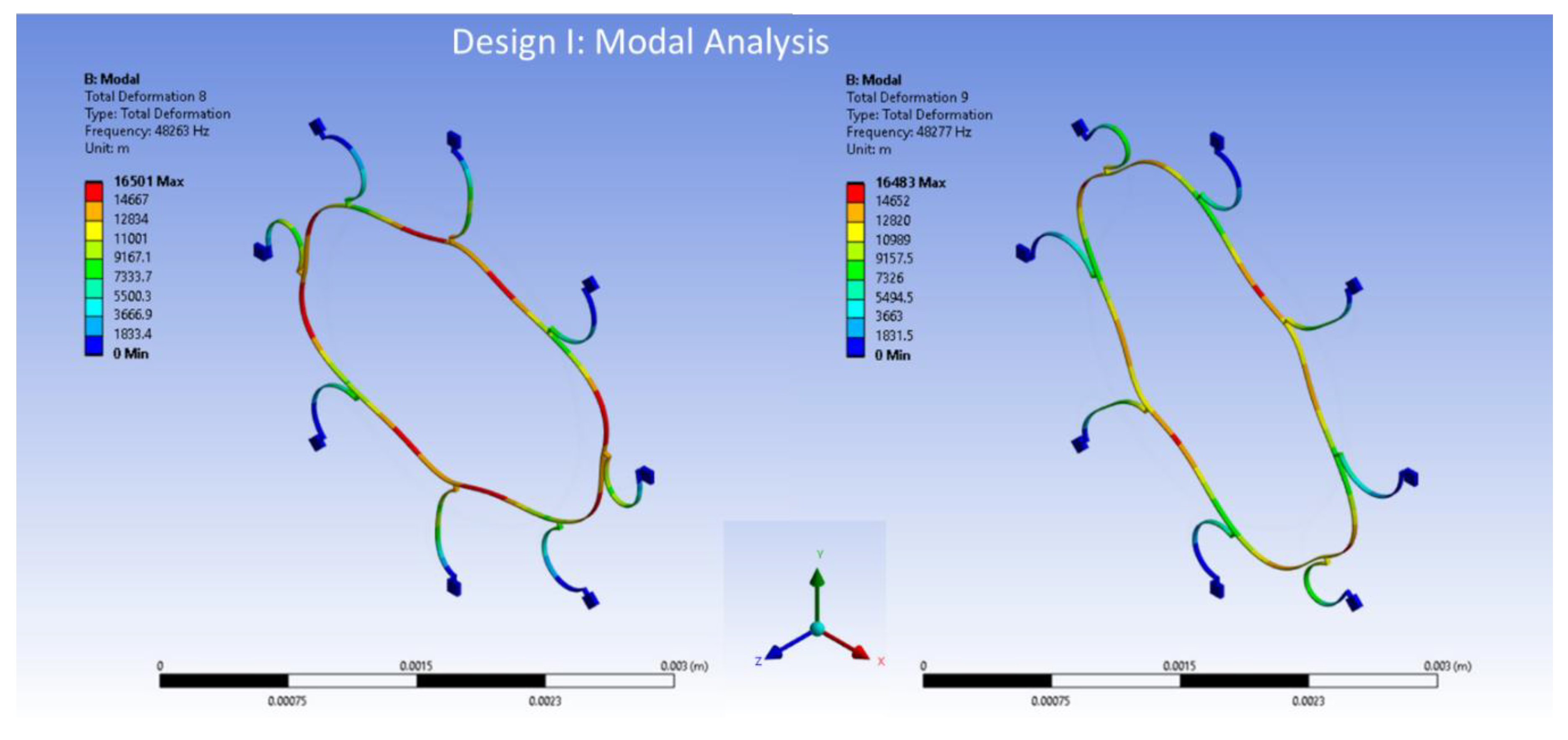
Figure 12.
The FEA modal analysis for Design II.
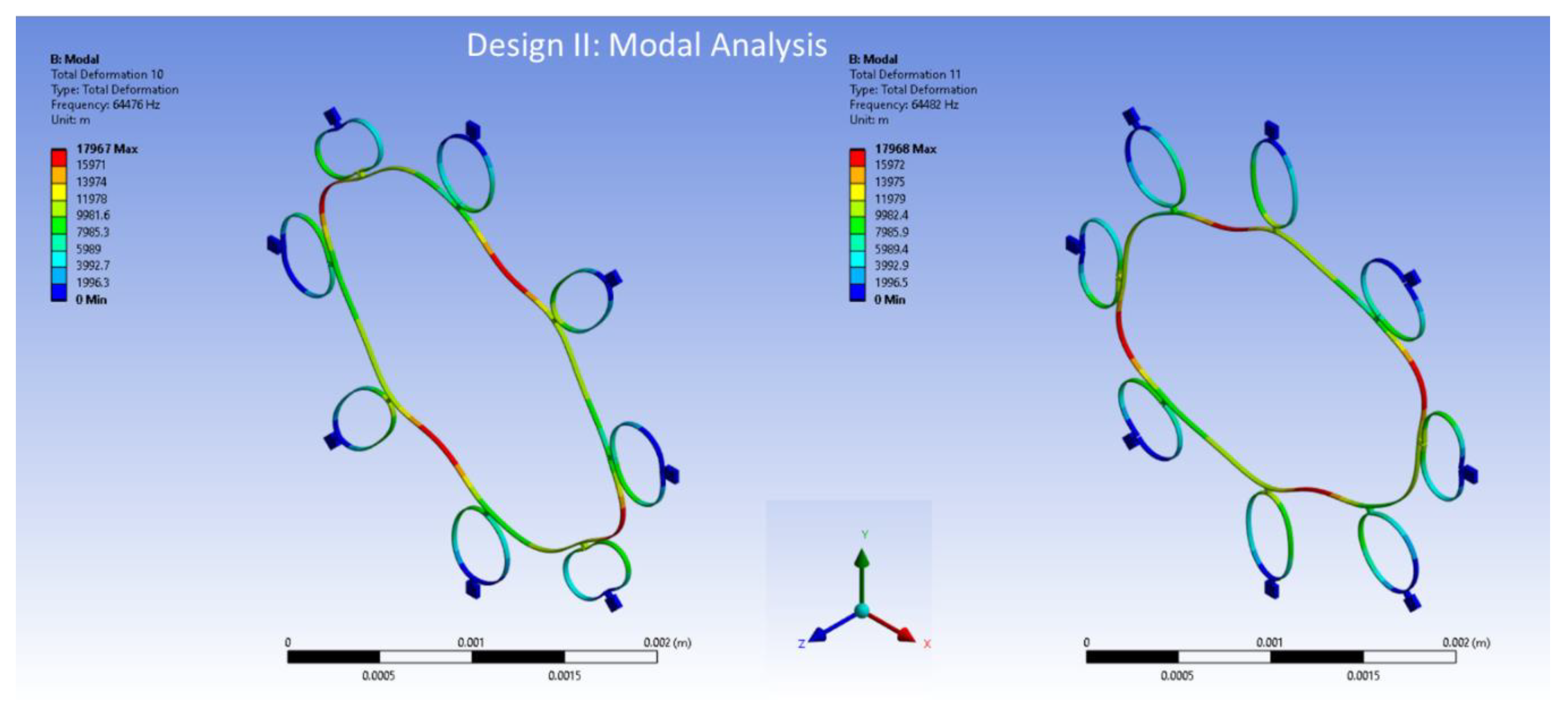
Figure 13.
A schematic representation of the electrode scheme for electrostatic actuation.
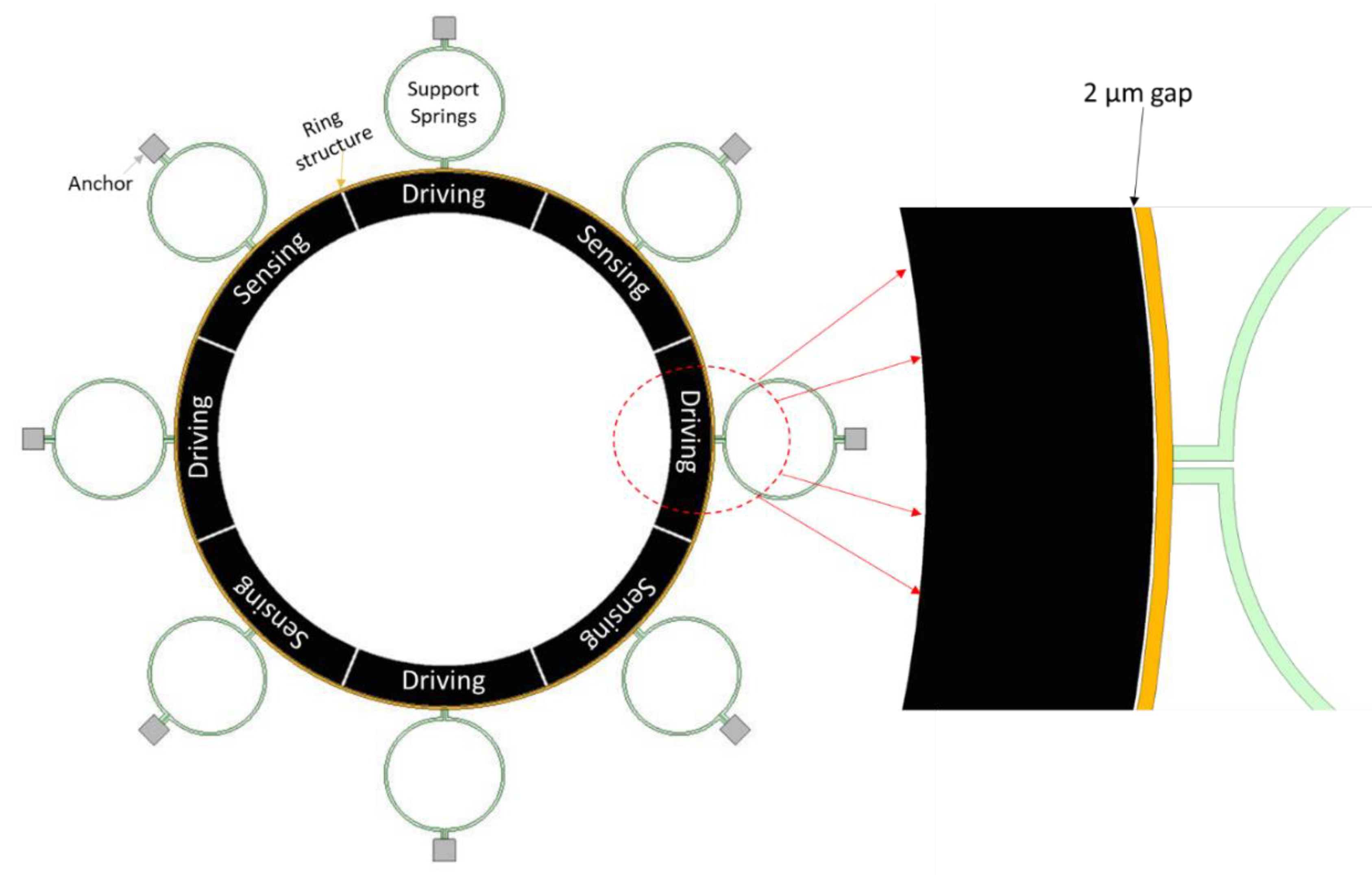
Figure 14.
A harmonic response analysis for the MEMS vibrating internal ring gyroscope design I. .
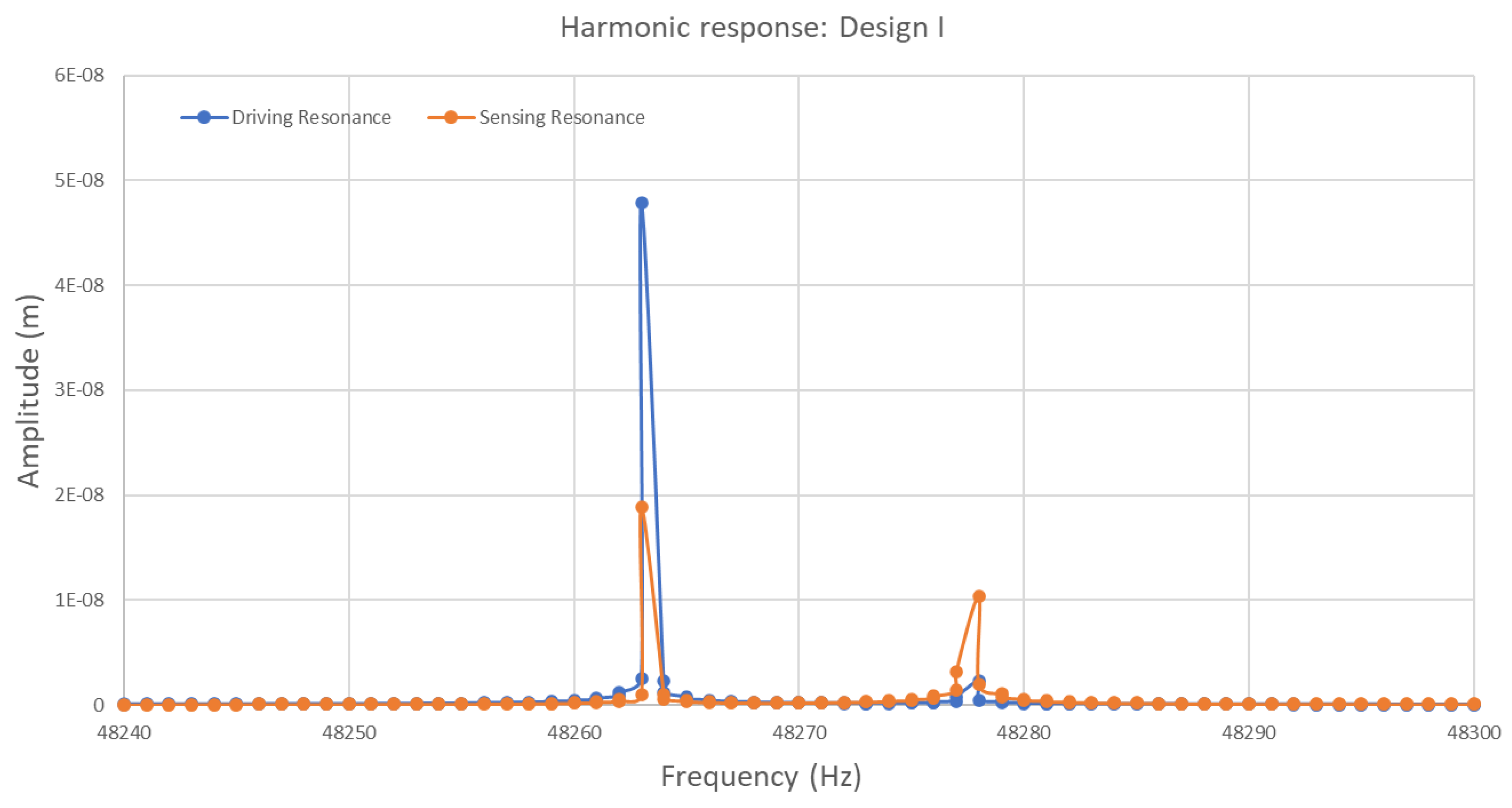
Figure 15.
A harmonic response analysis for the MEMS vibrating internal ring gyroscope design II. .
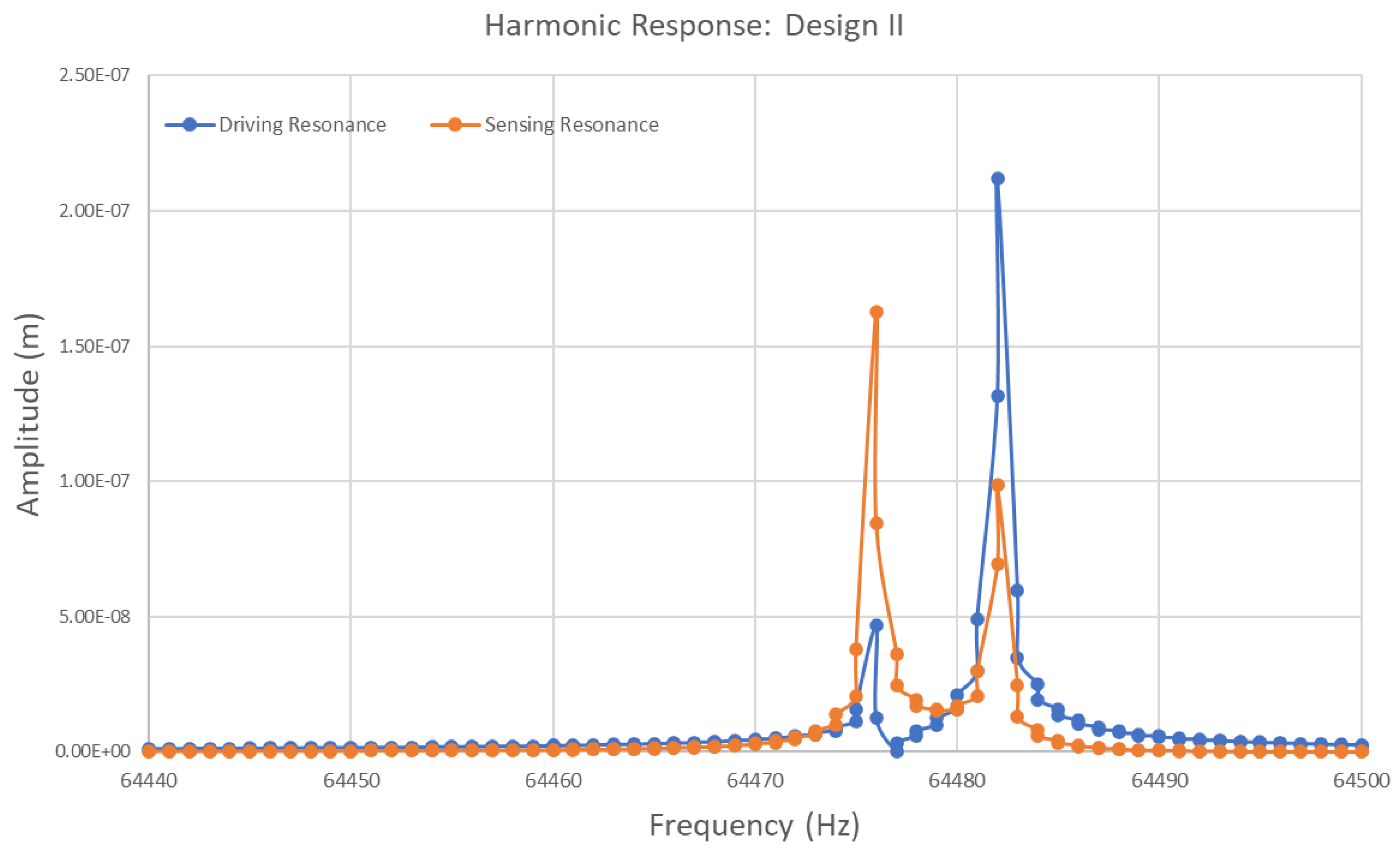
Figure 16.
Temperature fluctuations affect the Young's modulus of silicon material.
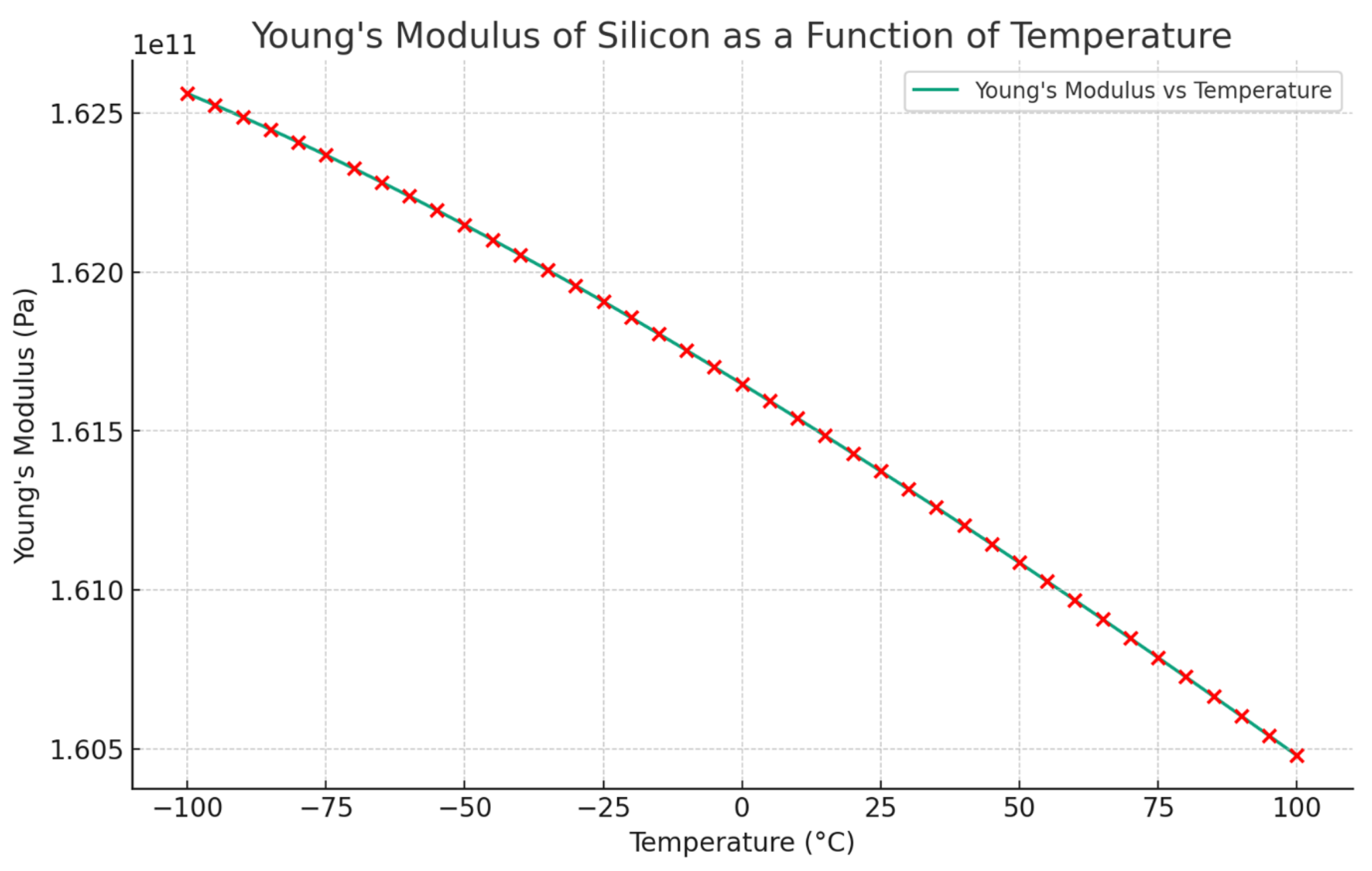
Figure 17.
Design I: Thermal Stresses developed at (a) -100°C (b) +100°C.
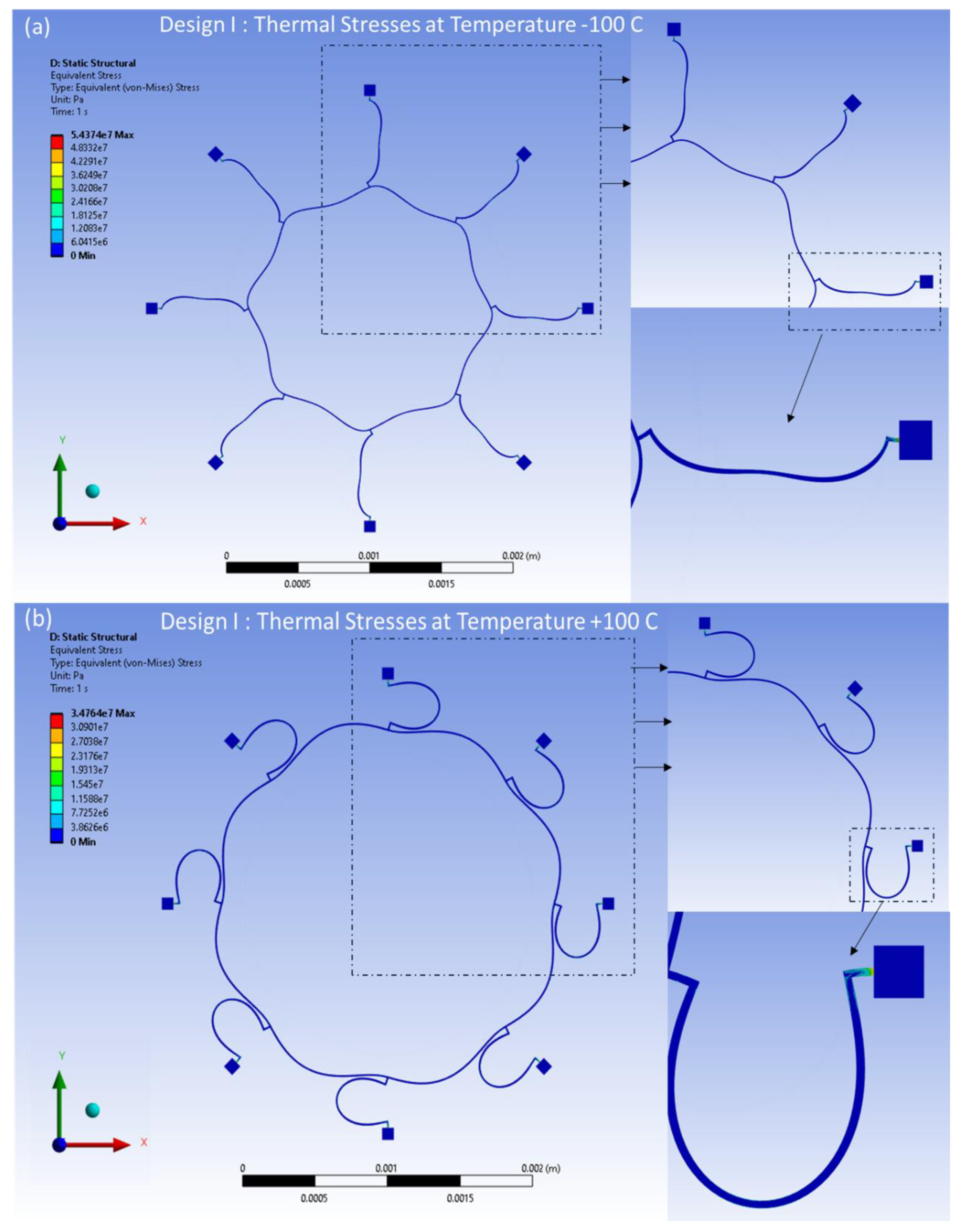
Figure 18.
Design II: Thermal Stresses developed at (a) -100°C (b) +100°C.
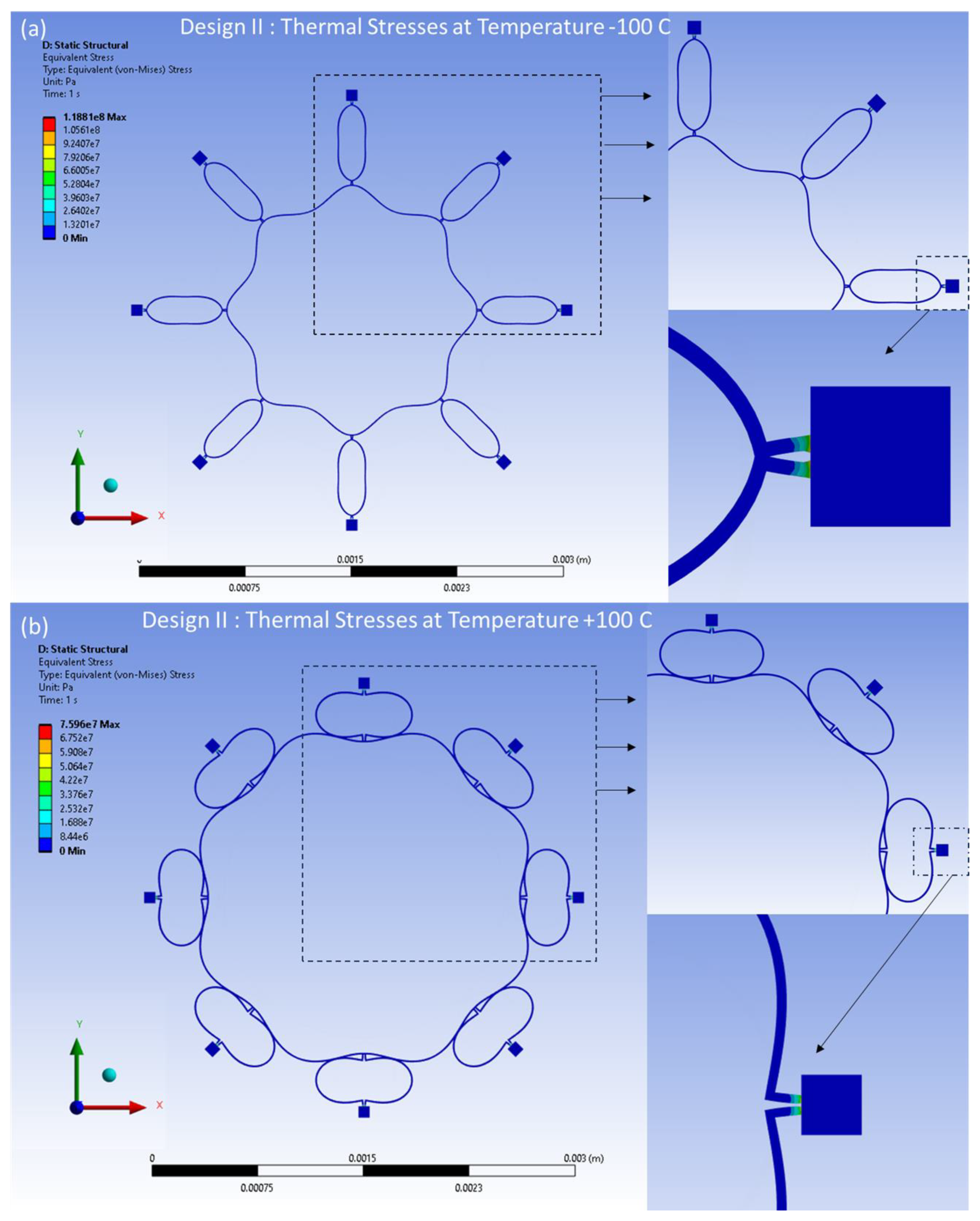
Figure 19.
Design I: Thermal Strains developed at (a) -100°C (b) +100°C.
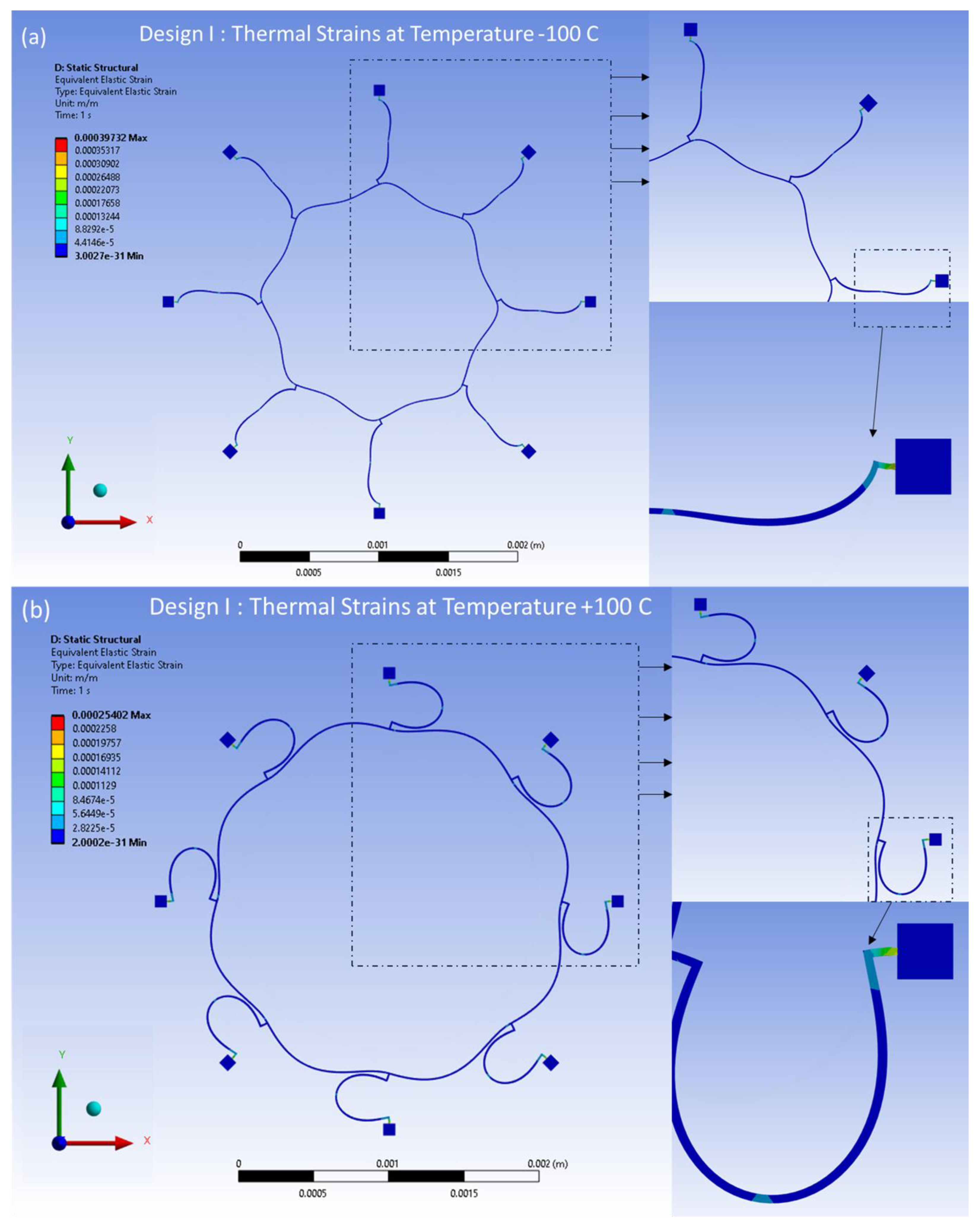
Figure 20.
Design II: Thermal Strains developed at (a) -100°C (b) +100°C.
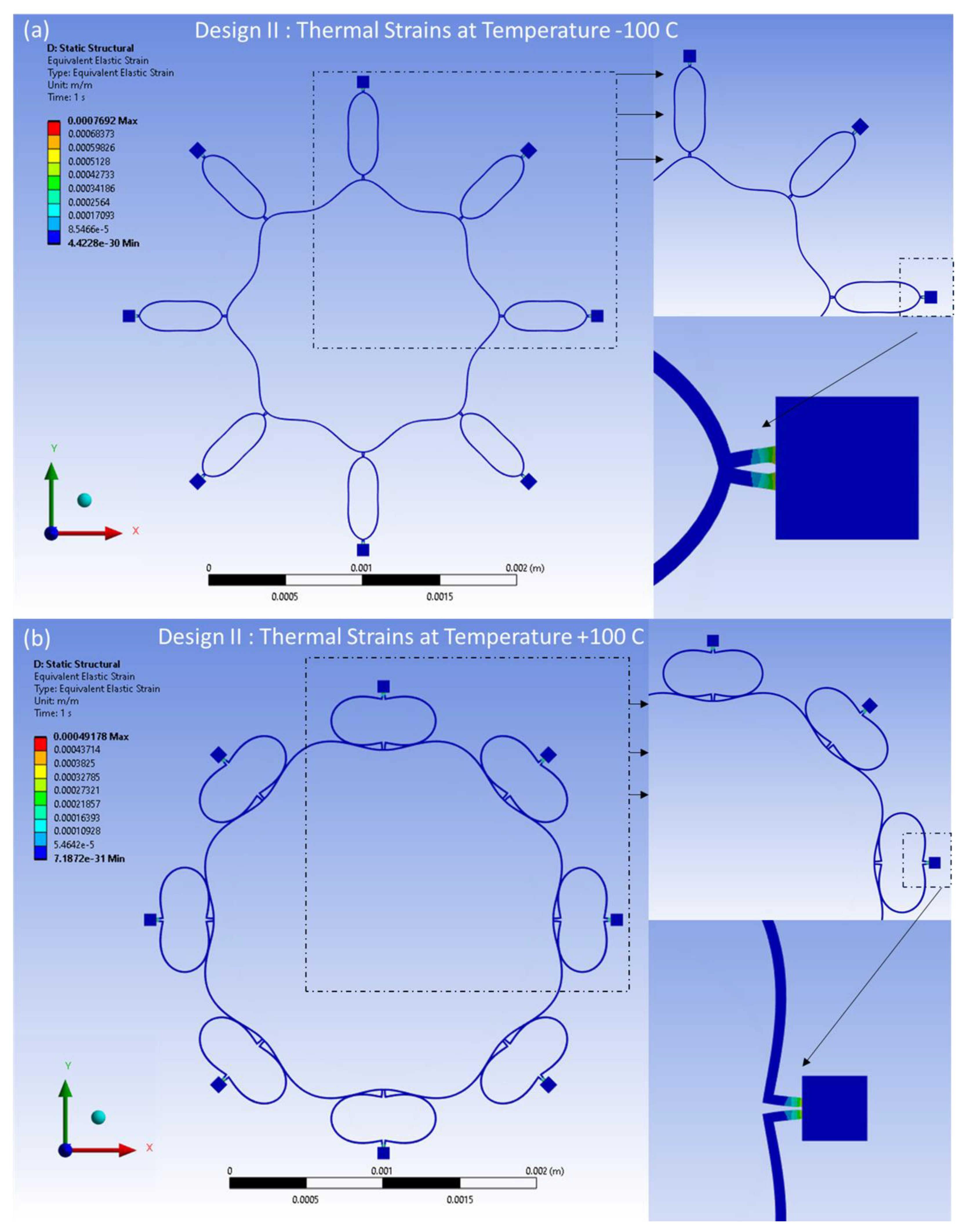
Figure 21.
Thermal Stresses vs Temperature Changes for Design I and Design II.
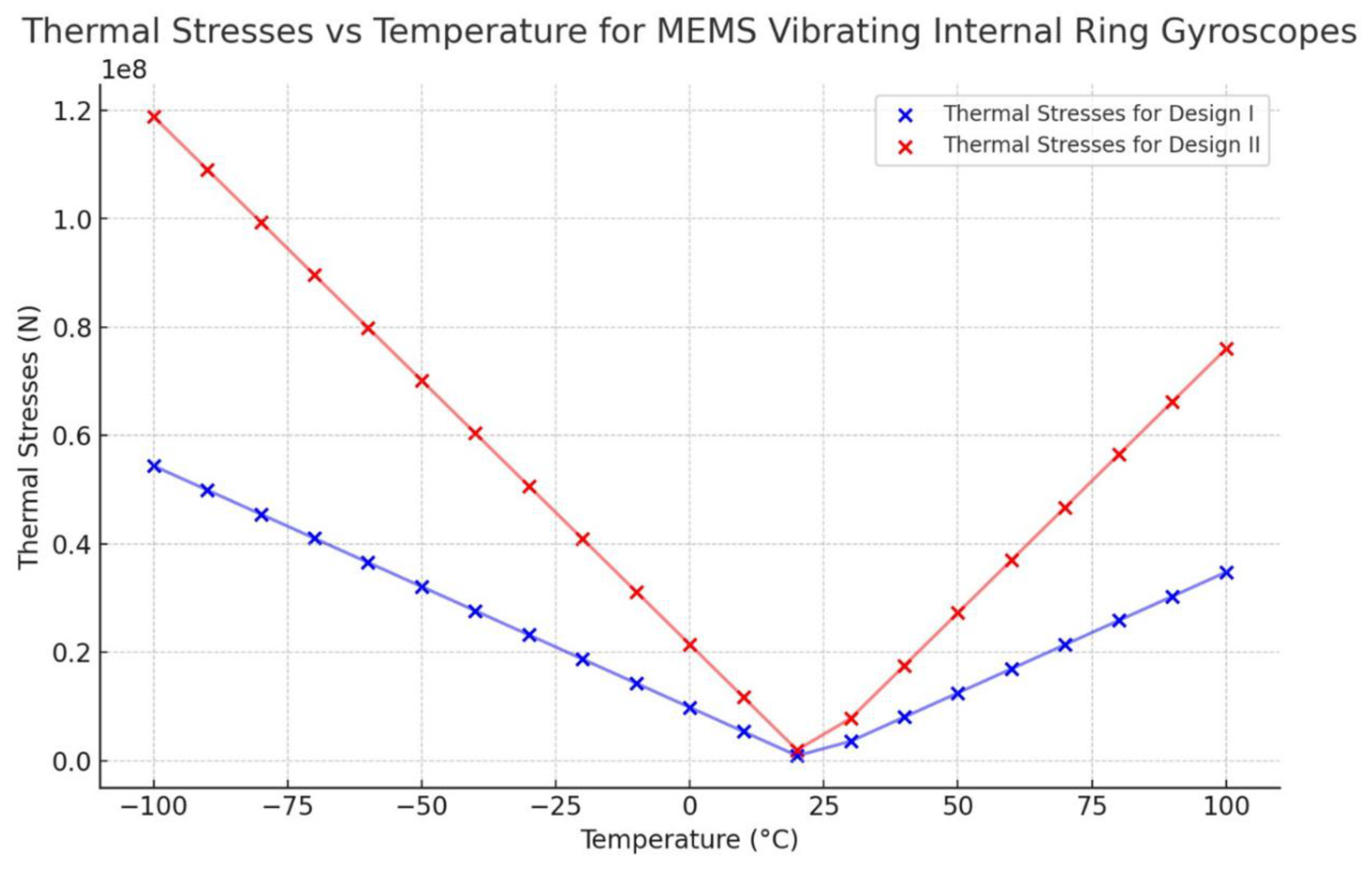
Figure 22.
Thermal Strains vs Temperature Changes for Design I and Design II.
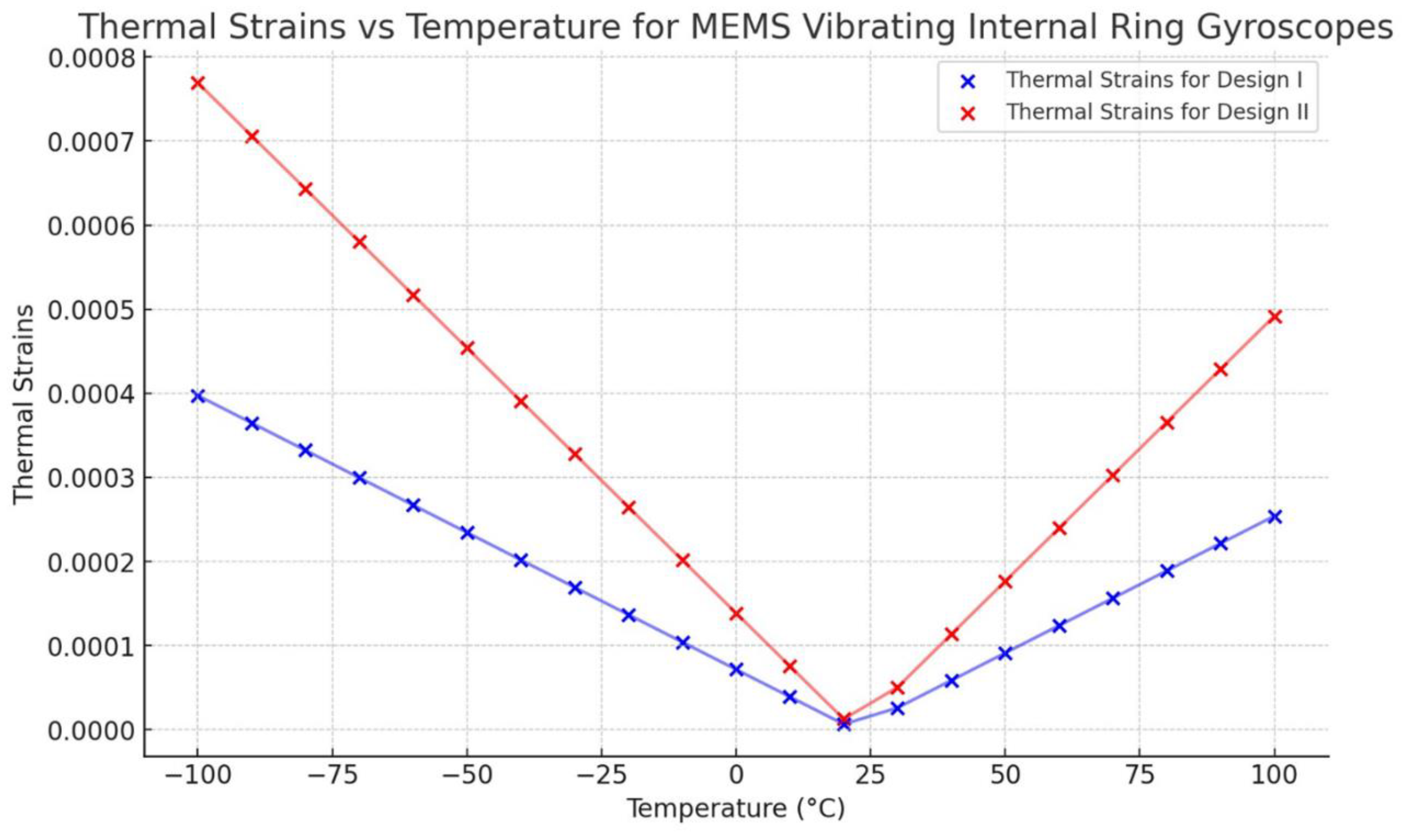
Figure 23.
Design I: Thermal deformation vs Temperature changes.
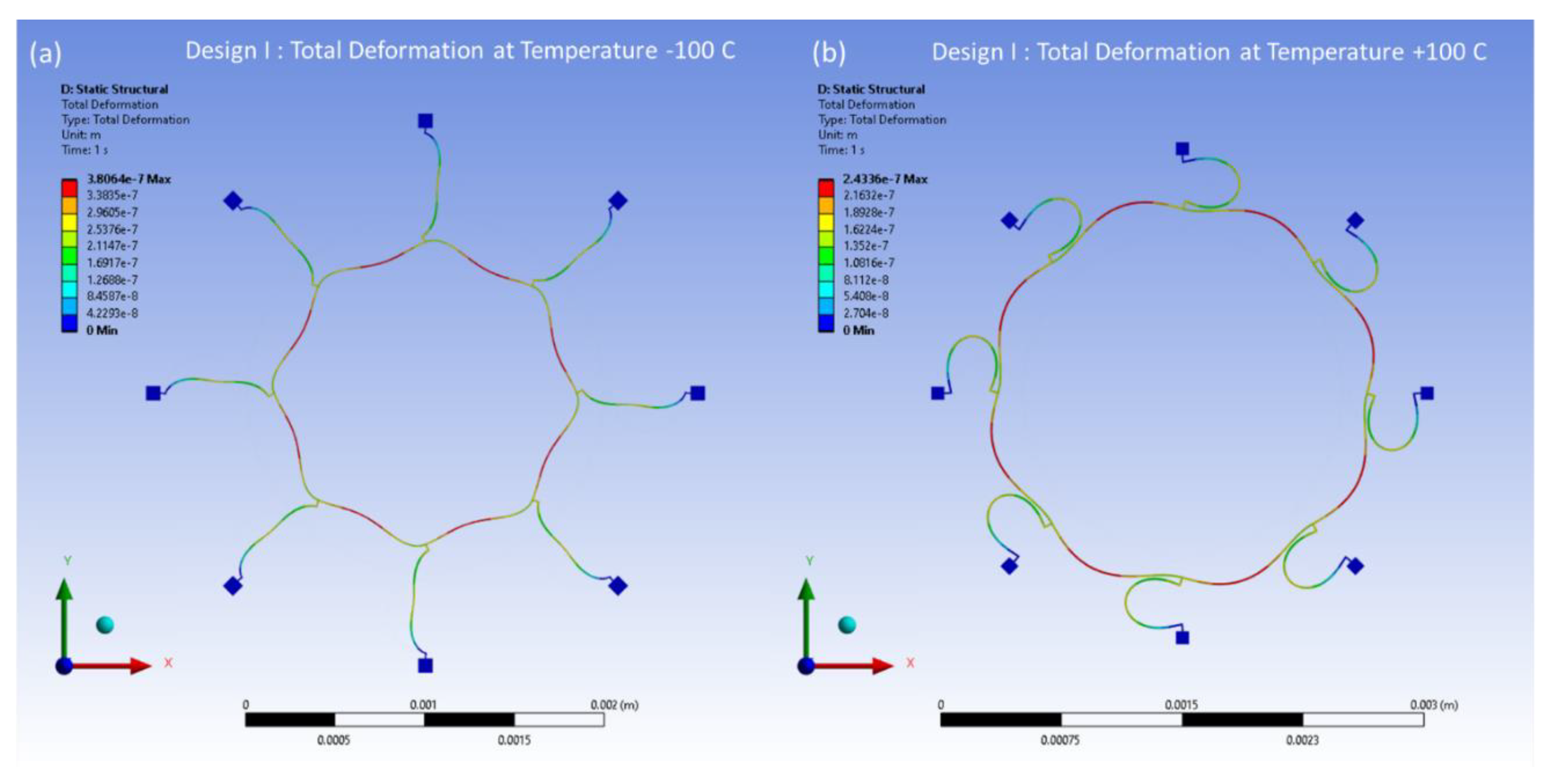
Figure 24.
Design II: Thermal deformation vs Temperature changes.
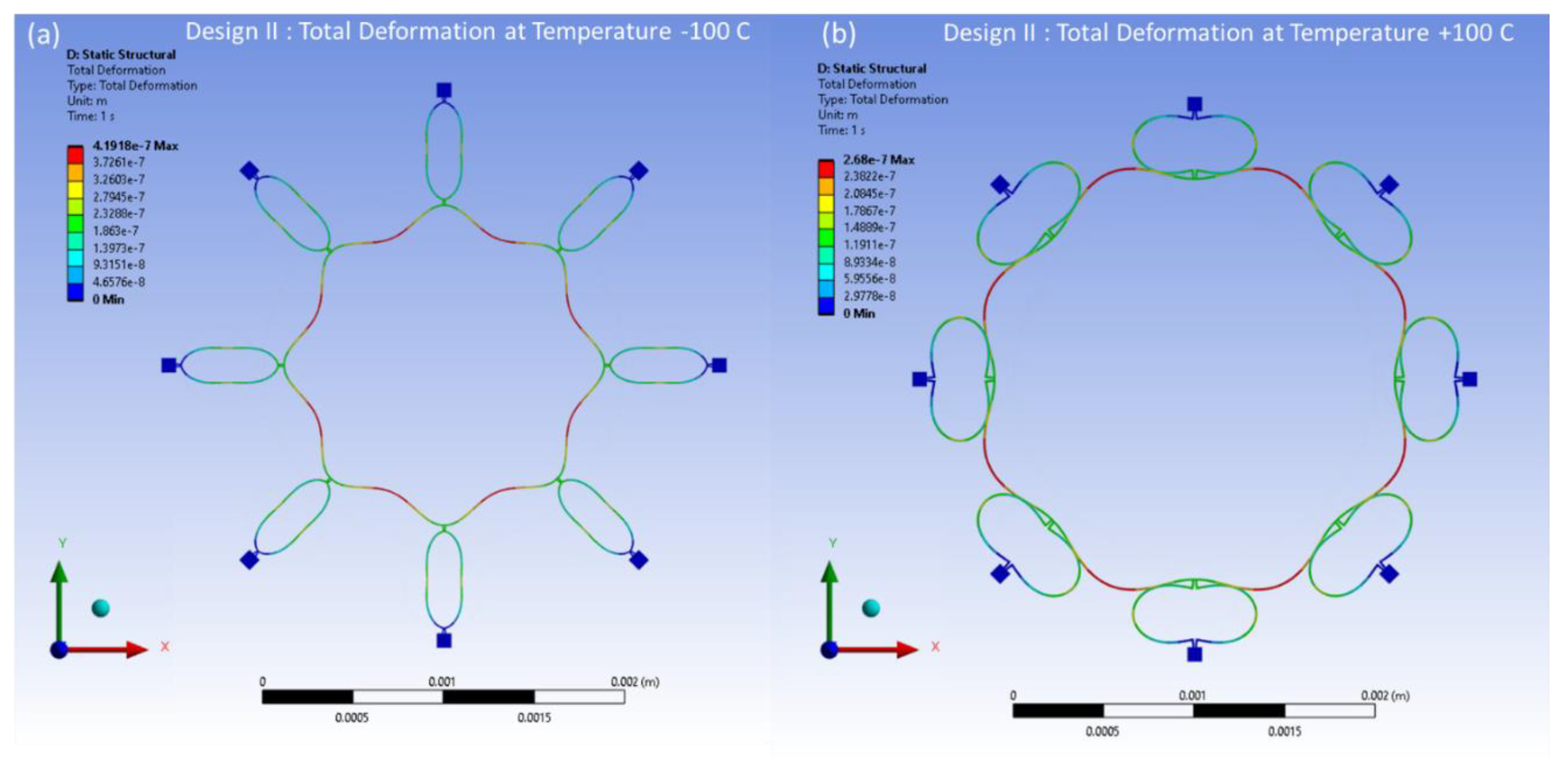
Figure 25.
Thermal deformation vs temperature changes for MEMS vibrating internal ring gyroscopes.
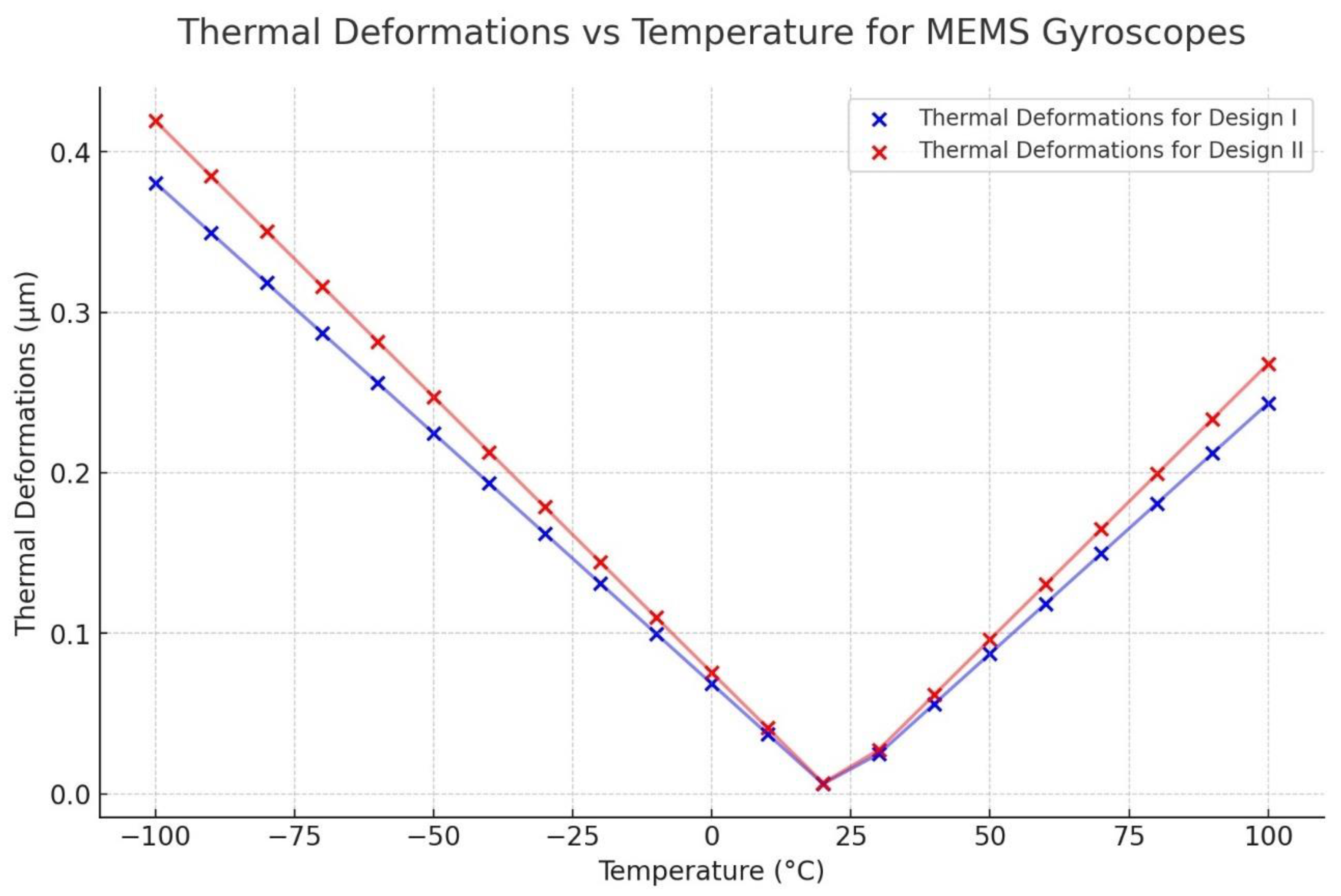
Figure 26.
Design I: Effect of temperature changes on resonance frequencies.
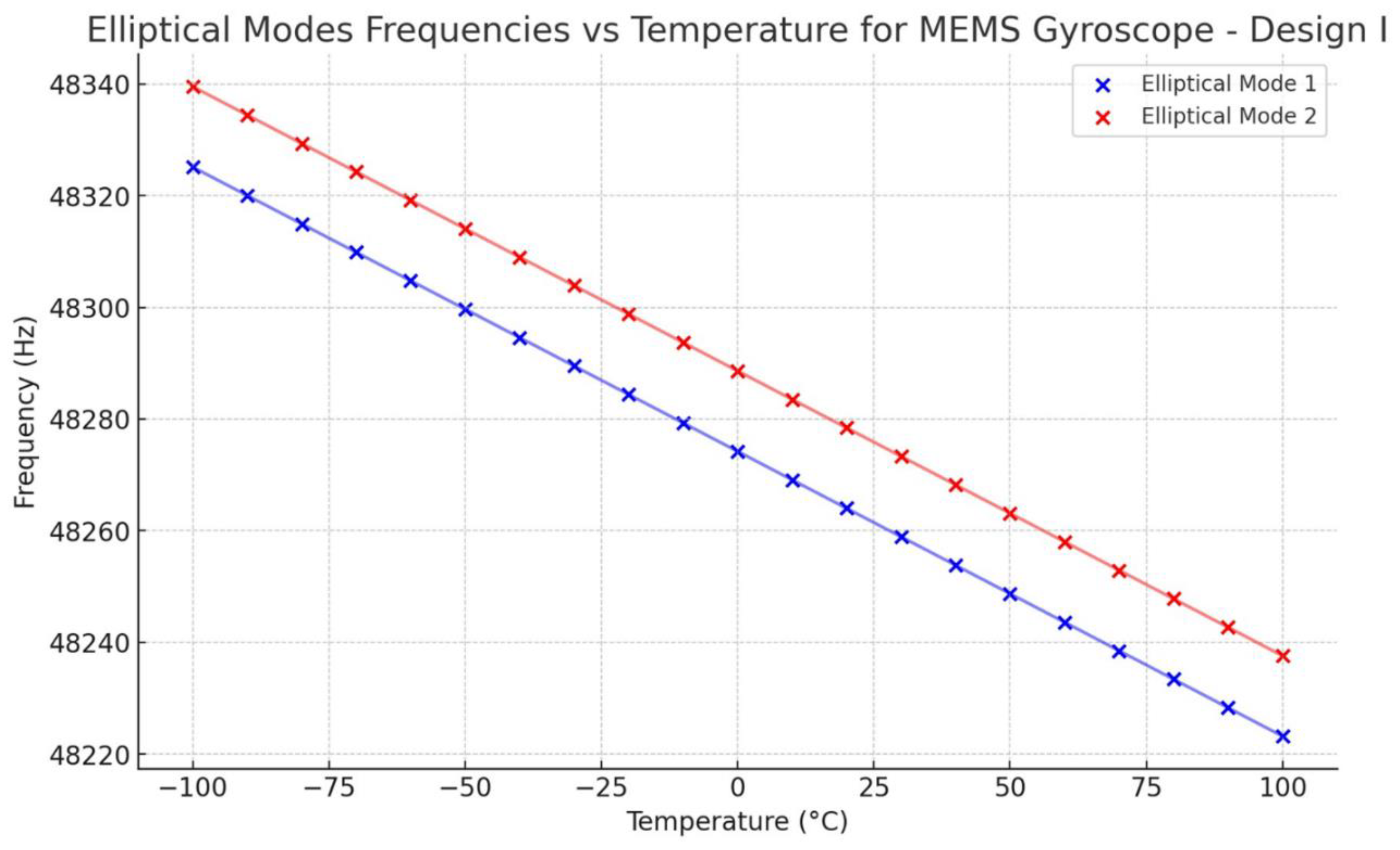
Figure 27.
Design II: Effect of temperature changes on resonance frequencies.
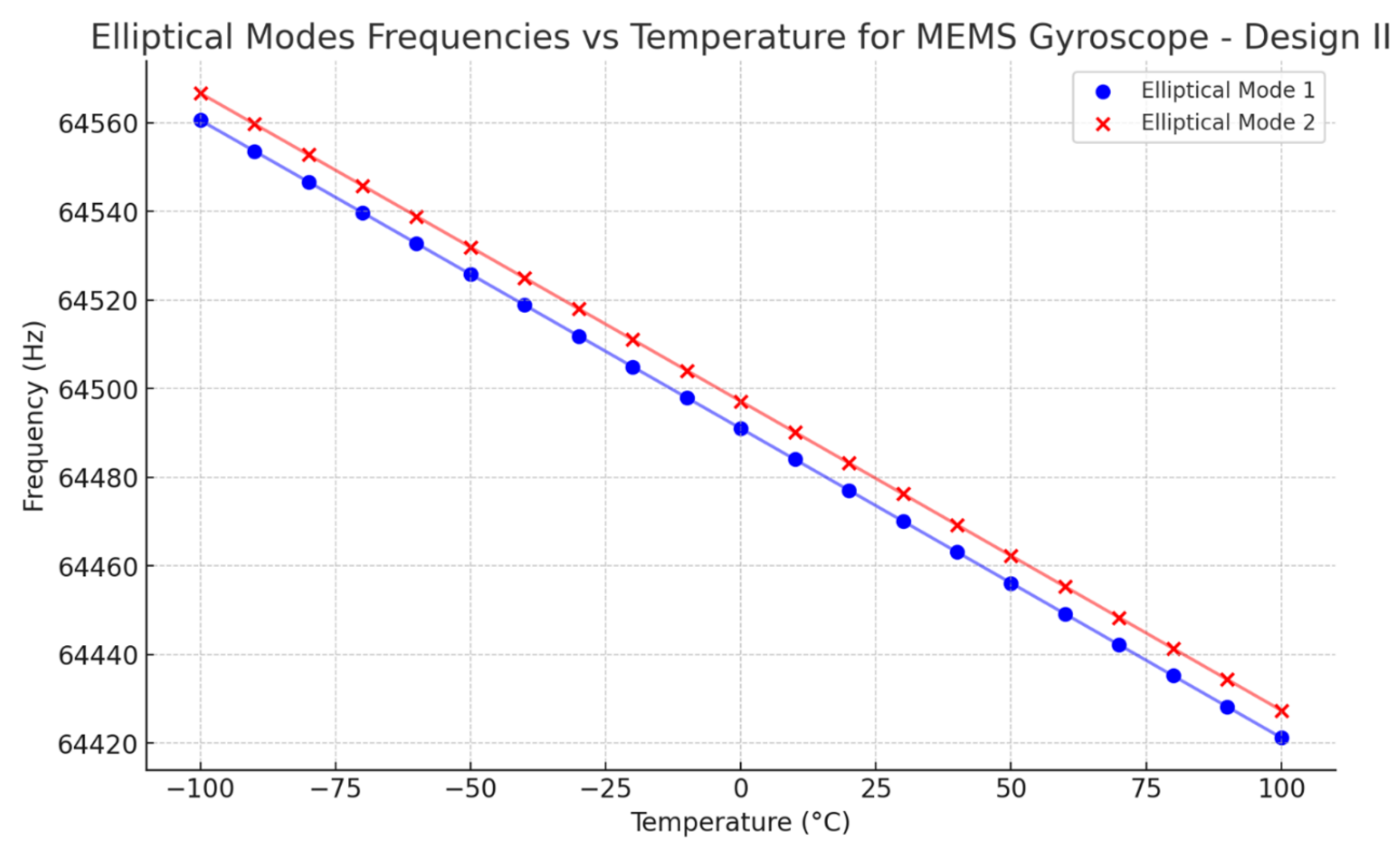
Figure 28.
Design I: mode mismatch resonance frequencies.
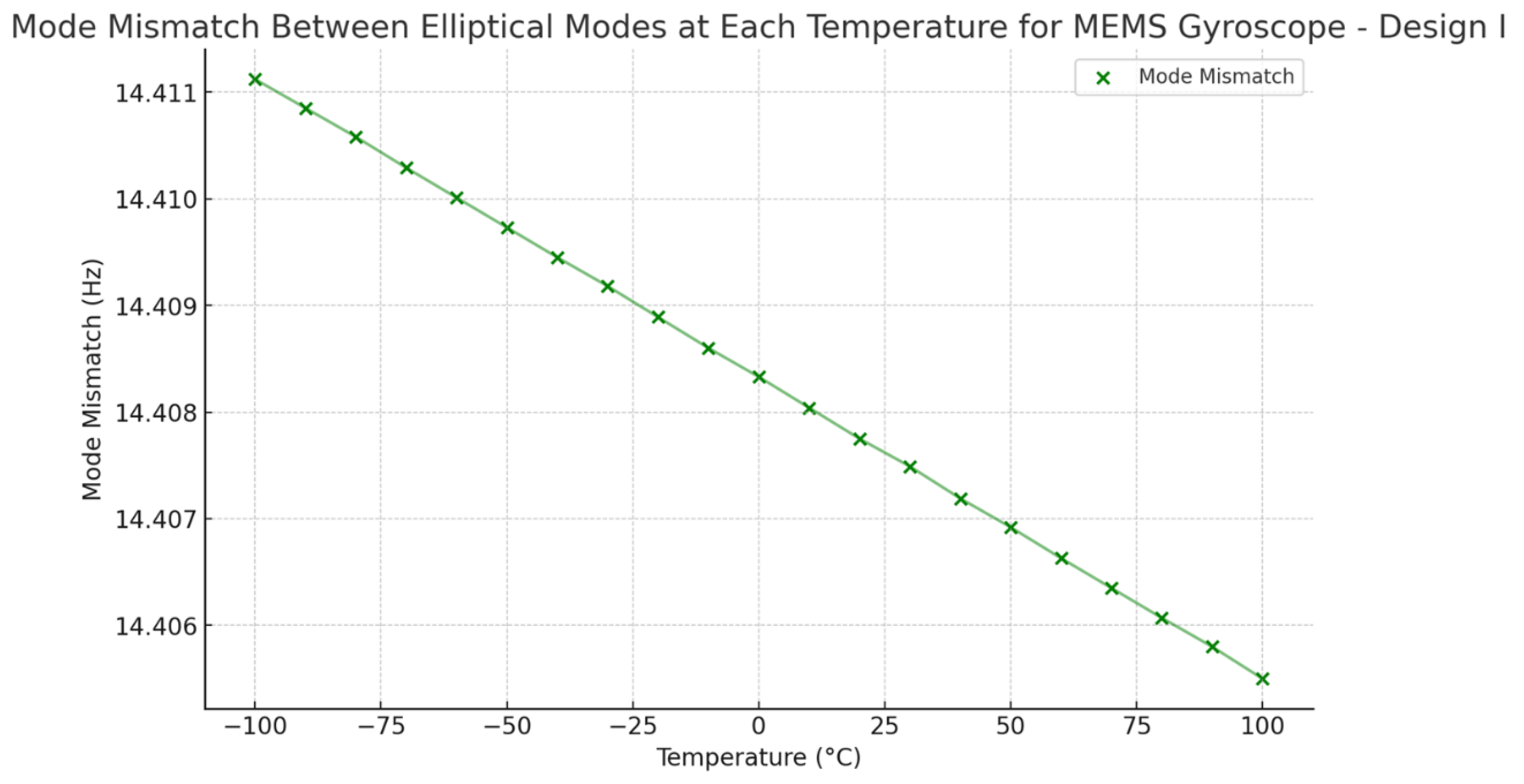
Figure 29.
Design II: mode mismatch resonance frequencies.
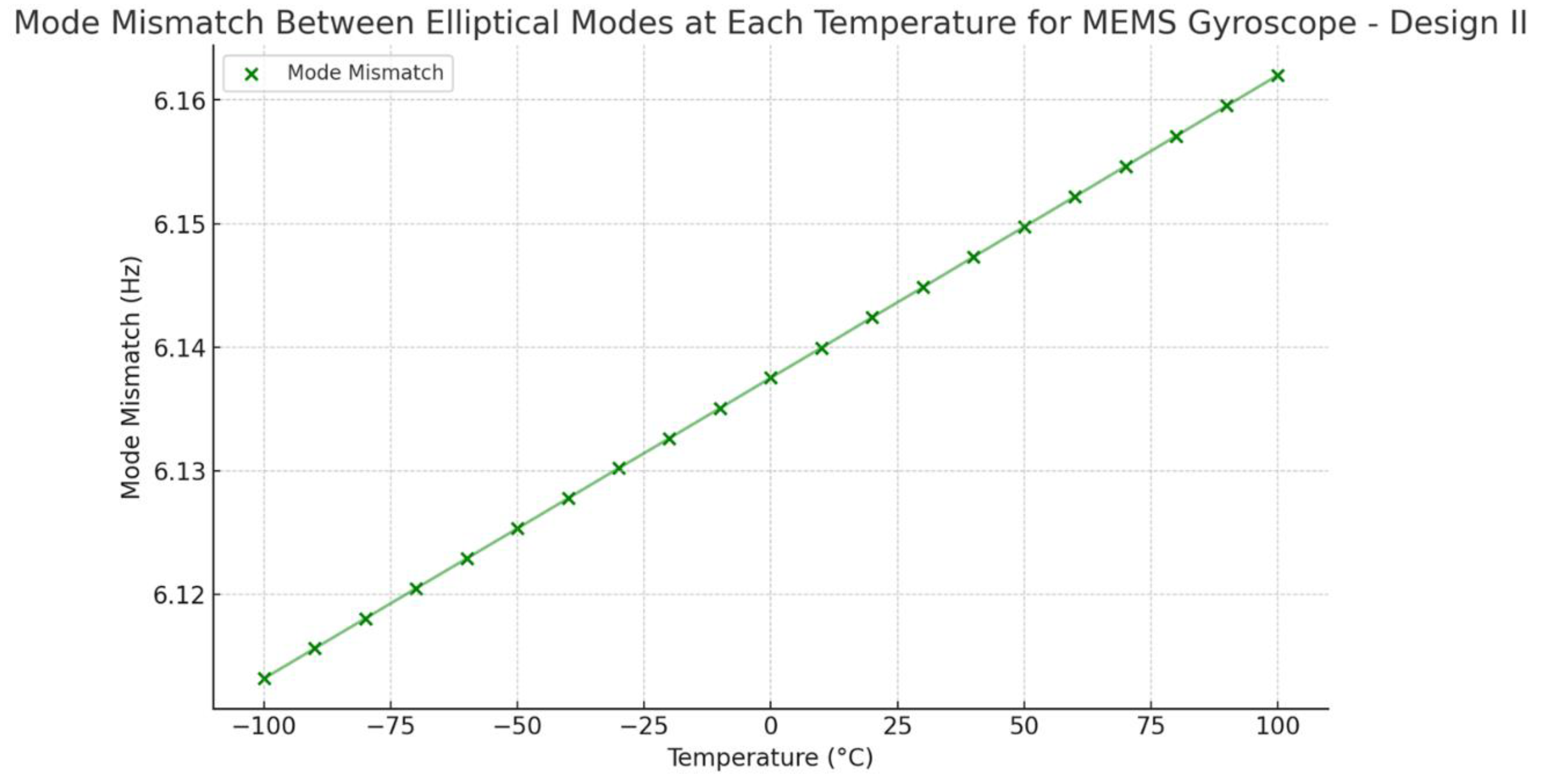

Table 1.
Design parameters of Design I: MEMS vibrating internal ring gyroscope.
| Design Parameters | Value (µm) | |
|---|---|---|
| 1 | Internal Ring Radius | 1000 |
| 2 | Structure height | 100 |
| 3 | Ring Thickness | 10 |
| 4 | Number of Semicircular springs | 8 |
| 5 | Semicircular spring radius | 210 |
| 6 | Semicircular spring thickness | 10 |
| 7 | Anchor area | 80 x 80 |
Table 2.
Design parameters of Design II: MEMS vibrating internal ring gyroscope.
| Design Parameters | Value (µm) | |
|---|---|---|
| 1 | Internal Ring Radius | 1000 |
| 2 | Structure height | 100 |
| 3 | Ring Thickness | 10 |
| 4 | Number of Semicircular springs | 16 |
| 5 | Semicircular spring radius | 210 |
| 6 | Semicircular spring thickness | 10 |
| 7 | Anchor area | 80 x 80 |
Table 3.
A comparison of results of vibrating internal and external ring gyroscopes.
| Frequency (Hz) | Internal Ring Design II | Internal Ring Design I | External Ring Design | Ring Radius (µm) | Ring Thickness (µm) | Spring Radius |
|---|---|---|---|---|---|---|
| Mode 1 | 64476 Hz | 48263 Hz | 40241 Hz | 1000 | 10 | 200 |
| Mode 2 | 64482 Hz | 48277 Hz | 40272 Hz | 1000 | 10 | 200 |
| Mode Mismatch | 6 Hz | 14 Hz | 31 Hz | 1000 | 10 | 200 |
| Total Springs | 16 | 8 | 8 | - | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



