
Submitted:
16 July 2024
Posted:
18 July 2024
You are already at the latest version
Abstract
Depictions of robots as romantic partners for humans are frequent in popular culture. As robots are becoming part of human society, they gradually assume the role of partners for humans wherever necessary: as assistants, collaborators, or companions. Companion robots are sup-posed to provide social contact to those humans who could not have it otherwise. These com-panion robots are usually not designed to fulfill one of the most important human needs: the one for romantic and intimate contact. Human-robot intimacy remains a vastly unexplored ter-ritory. In this article, we review the state-of-the-art research in intimate robotics. We discuss major issues limiting acceptance of robots as intimate partners, public perception of robots in in-timate roles, and the possible influence of cross-cultural differences in these domains. We also discuss possible negative effects human-robot intimacy may have on human-human contact. Most importantly, we propose a new term “Intimate companion robots” to reduce the negative connotations of other terms used so far and improve the social perception of research in the domain. With this article, we provide an outlook on prospects for the development of intimate companion robots, considering the specific context of their use.
Keywords:
human-robot interaction
; human-robot intimacy
; intimate companion robots
; sex robots
1. Introduction
The idea of romantic relationships between robots and humans is highly represented in popular culture. This comprises a prediction by David Levy that, by 2050, robots would be immersed in society to such an extent, they could be targeted as romantic partners for humans and could even contract marriage with them [1]. Formulating this statement, Levy could not account for the COVID-19 pandemic that would speed up the process of integration of robots into society. During that time a higher demand for a specific type of robot arose: the type that would fulfill social and affective needs from which individuals got restricted [2]. Those robots were called ‘companion robots’ i.e., social robots oriented on establishing closer relationships with the user [2]. The interest in developing companion robots seems to be reflecting societal interest, driven by increasing risk of loneliness, as indicated by several reports [3,4].
In this paper, we summarize research on specific types of companion robots - those designed to provide intimate and sexual satisfaction to the user. We outline the beneficial role that this type of robot can have while highlighting risks they may carry for the future human societies. Taking into account its acceptance across individuals and reported cultural factors that might impact the established relationship with those robots, we emphasize the importance of cultural context in forming bonds with robots, as it not only shapes these connections but also guides the direction of research and development. For instance, in Western cultures (in this paper mainly referred to US and European countries), significant effort is still required to enhance robot acceptance. In contrast, Eastern Asian societies exhibit a greater inclination toward integrating robots into service and healthcare sectors as previously reported [5]. This different acceptance extends to the development and release of robotic sex dolls [6], reflecting a cultural influence on the level of comfort and openness towards robot integration in human intimacy.
2. Terminology
Companion robots, such as NAO, Paro, and Pepper, [30,31,32] are designed to address loneliness by providing social interaction. However, these models typically fulfill only certain social needs, often overlooking a fundamental human need: intimacy. During the pandemic, the demand for a different type of robot — the sex robot [2]— increased significantly. These robots are specifically designed to meet users' sexual needs, offering a form of intimacy that companion robots do not [7].
The terms 'companion robots' and 'sex robots' denote two distinct categories, each differing from other types of assistive robots. This differentiation is evident from the prevalence of these terms in research literature. A search on the Scopus platform reveals 2,494 research papers on 'assistive robots' and 3,381 on 'collaborative robots,' compared to 636 papers on 'companion robots,' 186 on 'sex robots,' and only 6 on 'intimate robots.' This disparity not only indicates a relatively low research interest in these specific types of robots but also suggests that companionship and sexual intimacy are regarded as separate domains, each requiring different robotic solutions.
The low research interest in intimate and sex robots may be attributed to the novelty of the topic. However, it is also likely influenced by the general controversy surrounding these subjects, particularly in Western cultures, as we will demonstrate below.
To start with, here we propose bringing together the concepts of companionship and sex, under the term ‘intimate companion robots’ (ICR), instead of ‘sex robots’. While more neutral than ‘sex robots’, we believe that ICR carries also more complex meaning. This reflects the fact that as companion robots become more complex, they may also perform a more diverse array of roles for their human users, from being a mere tool for simple tasks, to providing emotional support [7]. Moreover, having such a neutral term may facilitate acceptability of ICR due to more acceptable cultural connotations.
3. Perceived Benefits of ICR
As they are designed for companionship, the main benefit of ICRs would be the mitigation of loneliness. A study conducted with elderly care home residents that interacted with Paro [8] have demonstrated that interactions with companion robots can improve emotional well-being, by decreasing loneliness. Additionally, this study found that residents not only experienced an enhanced emotional state after engaging with a companion robot but also increased their interactions with each other during sessions involving the robot.
This improvement is not only relevant when accounting for the aforementioned increased risk of loneliness, but also for populations more prone to isolation, such as the elderly, people with disabilities and those with impaired social skills [6].
However, the positive impact of loneliness is not the only identified benefit, as shown in Table 2.
It is noteworthy how people with disabilities can benefit from ICRs. As research shows, on one hand they face a societal judgement putting them in an almost asexual role and, on the other, their disabilities may not allow them to explore and satisfy their sexual needs, both on a physical and a mental level [7]. In those cases, an ICR could serve as a body-part aid, meaning it could support or perform functions of a body part for physically impaired users [7]. ICR may also provide intimacy, emotional support and sexual companionship, being thus a judgmental-free tool for users, not only the disabled ones, but also individuals who may not want or don’t feel capable of having a human partner to explore their sexuality [7,35,43] and fulfill sexual desires [9]. Cognitively, people with disabilities may also benefit from the use of ICR in the sphere of sexual education, learning about sexuality, emotions and consent, preventing abuse [7,10]. ICRs may also support therapies of different natures (psychological, physical, sexual), being used both in assessments and interventions [43].
Other contexts where the introduction of ICRs seems to be beneficial include: a substitute for sex workers [1,6,10], in prisons [6], and, in general, contexts of social isolation [10,43], in maintenance of a relationship [10], in research as a tool [43]and to satisfy transgressive sexual behaviors (those that are non-consensual or legally sanctioned), although the latter is rather controversial, considering available data [6]. The idea that ICRs could be used as a harm reduction tool by satisfying transgressive sexual needs has mixed empirical support. One study found that individuals with pedophilic interests or a preference for non-consensual/violent sex were more open to engaging with ICRs compared to a control group [28]. However, another study revealed that sex offenders were not only less likely to engage with sex robots but also more skeptical about their potential to prevent sexual violence, compared to non-offenders [29]. This area of research is worth pursuing further due to its societal relevance and the significant risks posed by misconceptions regarding the use of ICRs for treating sex offenders.
4. Acceptance and Intimacy of ICR
As mentioned earlier, acceptance of ICRs depends on several factors such as users’ cultural background, indicating a tangled network of relationships between these In the following sections we attempted to group and describe these factors, as indicated by the current research, regarding their influence on the acceptance of ICRs. These main factors are summarized in Table 1 and discussed in detail below.
4.1. Robot and User Characteristics
It appears obvious that the acceptance of ICRs relies on several factors related to both the user and the robot. These include: ICR’s appearance, user’s characteristics, robot’s features, established interaction between the robot and the user and culture. Given that ICRs (as a term and concept) are not widely researched as we propose in this paper, the existing data refers to acceptance of sex robots and companion robots, separately.
Gender
When it comes to user group characteristics, gender appears to be the main predictor for acceptance of sex robots as listed by a number of authors [36]. Men tend to express more positive attitudes than women [10,11,31,36], and so do non-binary and gender nonconforming individuals. In their study, Nordmo et al. found gender as a significant effect on acceptance, with a significant interaction effect between gender and robot type (sex robot or platonic robot) [11, with women showing significantly less acceptance of sex robots compared to platonic ones, while men showed a similar attitude towards both types [11]. It is noteworthy that the gendered difference in perceiving ICRs is likely unrelated to how different genders view sex, even though heterosexual men find sex robots desirable for both personal use and sex work [6]. However, it is possible that those differences emerge from the fact that it is expected for men to express their interest in sex as reflected in that the current market targets heterosexual men, with more women-like robots available [36]. The latter notion is supported by data showing that women express more interest in sex robots specifically designed for them [41].
Age
Across age groups, people in the age group 20 to 33 years reported less acceptance of sex robots, compared with older participants (34 to 61 years) [10], but younger men (ages 20 to 30) were more accepting of robots in roles of care for elderly (other features of those respondents included being educated and urban-living) [20]. That shows that the effect of interaction of user’s gender and age on ICR’s acceptance is not yet clear. Companion robots, on the other hand, seem to be more accepted across generations, with adults and children differing on the valuable features that the robot should have [5]. Not only the physical appearance of the robot impacts their acceptability, with more human-like being more accepted for intimacy [12], but also their gender: sharing the same gender with the user makes them more acceptable for people [5]. However, the robot’s gender doesn’t seem to impact the user's trust on them, which is noteworthy, as trust is an important component to forming meaningful relationships [13].
Personality
Regarding personality, although previous studies focused on the effect of the Big-Five traits on robot’s acceptance, concluding that Openness is a positive predictor for it and Acceptance and Consciousness are negative predictors [42], more recent data implies that more than the Big-Five traits, levels of erotophilia (willingness in engaging in sexual activities) and sexual sensation seeking (seeking for diverse type of stimuli) are better predictors, relating positively to interest an acceptance of sex robots [36]. In a study conducted with American men (who were particularly interested in elements of Japanese pop culture, like anime and manga) revealed that both shyness and self-isolation are positively related to accepting and purchasing a sex robot [38].
When it comes to sex robots, current data suggest, surprisingly, that the robot’s feature that might enhance its acceptance the most is the quality of the sexual experience it provides, which plays a bigger role than its appearance [36]. For example, in an online study linking user personality traits and acceptance of sex robots, it was determined that “erotophilic individuals seeking novel or more intense sexual experiences may be(come) the primary users of sex robots and influence their development”. This shows clearly that acceptance of ICRs may primarily depend on users' individual preferences and their readiness to accept an inanimate sexual partner, more than any other factor. As stated by the authors themselves, the research on individualized preferences may be the most important when it comes to determining acceptance of ICRs.
4.2. Robotic Touch
Once the robot per se is accepted, we are confronted with how well would an intimate contact with it be tolerated. One way of promoting intimacy is through touch [14], which has a number of sub-components influencing acceptance such as type of touch, location of the touch, strength of the touch, social context, receiver’s expectation and the robot’s body temperature [12,14,16]. A study with a Japanese sample, aimed at identifying what characteristics of touch would promote perceived intimacy between users and robots, suggested that the robot’s patting increases the feeling of intimacy (compared to touch, stroke and grip), especially when delivered with the fingers [14]. It seems that if subjects feel like not having a relationship with the robot they feel more intimacy in touches that feel less personal or that are not reserved to closer peers among humans themselves [14].
Another study suggested that, given participants’ reports, forming an emotional bond with a robot is perceived as less disturbing when compared to physical bond, formed through intimacy and sex [12], even with only 24,9% of participants considering intimacy with robots possible. Then, when participants had to touch the robot, touching areas considered less intimate (head) evoked higher electrodermal activity (indicating higher emotional arousal), in contrast to areas considered more intimate (buttocks) [12].
Those findings might suggest that intimacy with robots might be achieved by first establishing some sort of emotional relationship with them, in which the user would feel safe and comfortable. They also suggest that methods for establishing emotional bonds with ICRs might be significantly moderated by cultural codes, such as the use of touch. We believe that cultural influences are not to be ignored when considering ICRs design and acceptance.

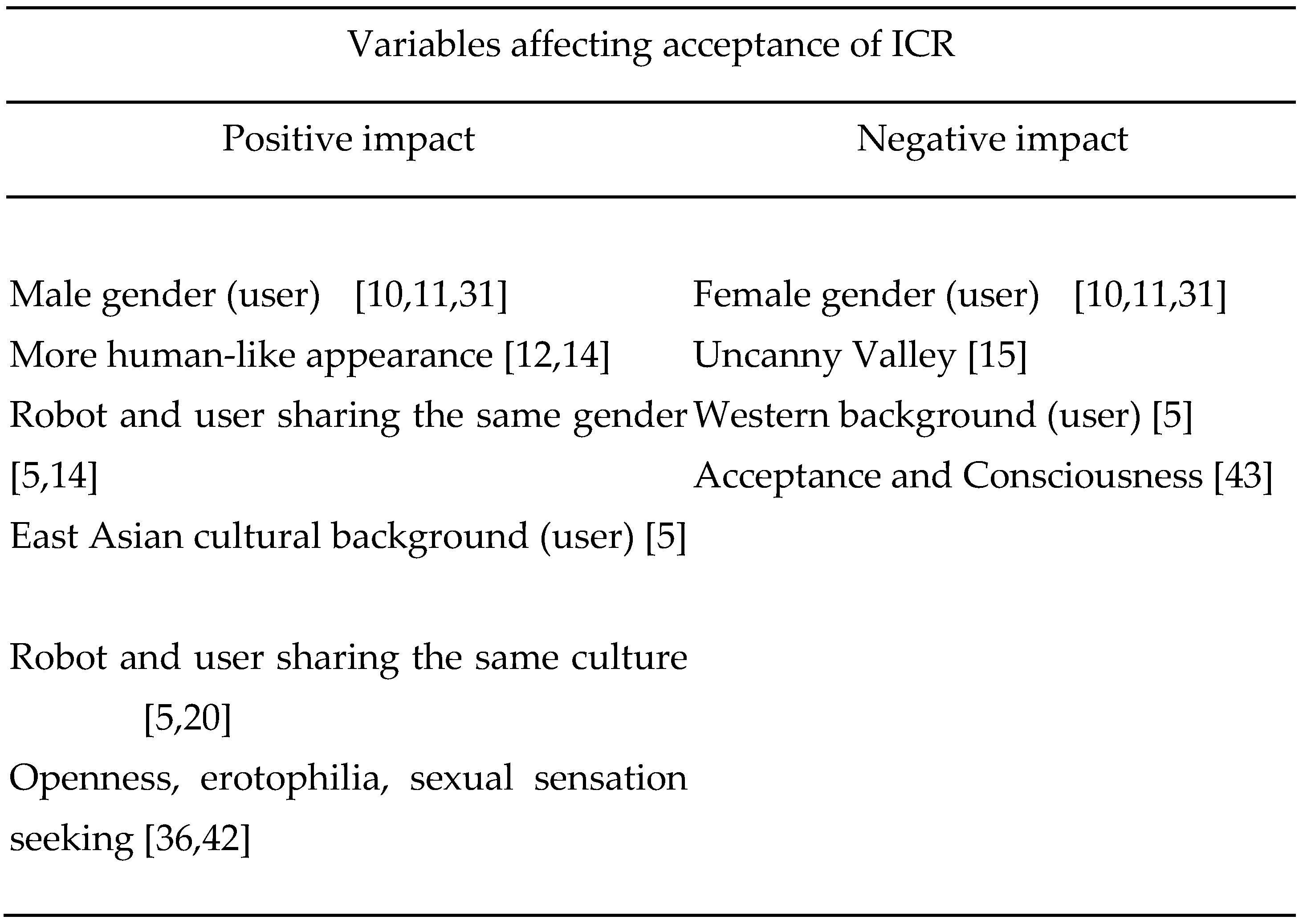
Table 1.
Identified variables that influence the acceptance of ICR’s in a positive or negative way.
4.3. Cultural Influences in ICR Acceptability
Cultural context appears to play a fundamental role for acceptability of ICR, as it implies in other factors identified as variables in the robot’s acceptance equation. For instance, the desired appearance and form of the robot is different between cultures: while in the US, robot form’s imitating children, animals, and family members are considered inappropriate [10], in Japan, robots include childlike models that do not allow sexual intercourse (by not being penetrable) and “waifus” (fictional characters that one can consider their romantic partner) [6,17]. Interestingly, while lower acceptance of robots is more of a Western issue, but it has been improving over time, with an observed 6% increase in Americans who would consider having sex with a robot, between the years 2017 and 2021 (from 16% of the population to 22%) [7,36].
Culture significantly influences expectations of robot behavior. In Japan, robots are often viewed as independent beings with humanlike qualities [19], leading to higher acceptance of humanoid forms [5,18]. In contrast, Western societies typically see robots as tools or aids [18], which can create a bias against humanoid acceptance. Consequently, Americans report greater comfort with less humanoid robots, while Japanese individuals are more comfortable with humanlike robots [19]. Increasing the physical human likeness of a robot tends to cause more discomfort among Americans than Japanese. Conversely, enhancing the emotional human likeness of a robot increases comfort for Japanese individuals and decreases comfort for Americans [19].
Culture might also be an important factor explaining the difference of robots’ presence in Eastern and Western societies, which is noteworthy since East Asian countries represent the world’s top three places in robot use [18]. Not only are robots more present, but it appears that in East Asia, the population is generally receptive towards them [20]. As a result, this higher exposure to robots also shapes its acceptance, with a longer exposure over time generating more acceptance of robots, regardless of the user’s culture [20].
Studies on Eastern cultures have also considered robot appearance and its gender as factors influencing acceptance [14]. The appearance of a robot is a complex issue in terms of acceptability. A robot can appear human-like only up to a certain point before it reaches the so-called 'uncanny valley.' This phenomenon occurs when a robot's attempt to closely mimic a living being falls short, resulting in feelings of repulsion rather than affection [15].
Taken together, these apparent cultural differences raise the question of why robots are more integrated into Eastern societies compared to Western ones. Interestingly, some authors suggest that this distinction is rooted in distinct cultural and religious heritage. In Eastern philosophies, such as Taoism, there is a belief in the unity between human and non-human beings (nature), which fosters greater acceptance of robots. In contrast, Judeo-Christian traditions often emphasize a separation between humans and non-human entities, which may contribute to a lower acceptance of robots in Western societies [18]. To explore this distinction empirically, one study compared the gaze direction in pictures featuring both a robot and a human. Pictures were retrieved from search engines using the same keywords in English and in Japanese. In the English language context, human-robot gaze was usually directed at each other, in a so-called binary relationship. Meanwhile, in the Japanese language context, gaze was directed to some other, common direction, in a ternary relationship [18]. The Japanese context suggests that it might be that, in Japan, robots are treated as equals or, at least as partners. This happens since the user and the robot show signs of joint attention, a preverbal form of communication based on directing or following the partner's gaze to share the experience [21]. Therefore, the perception of a robot's identity and the human-robot relationship is influenced by cultural cues, which should be considered when exploring user acceptance of humanoid robots.
Culture not only influences the user’s perception of ICR, but also shapes the way robots should be designed: the closer the robot is to the user’s culture or ethnicity, the more the user anthropomorphizes it [5]. It follows that anthropomorphizing might enhance social connection between humans and robots. Alongside, when robots behave according to the user’s culture or speak in the user’s native language, they are more likely to be perceived as a group member [20]. Therefore, we need to consider how important it seems to be that a robot matches the user’s cultural backgrounds in order to achieve a higher acceptance of ICR.
However appealing, the idea of assuming that robots are universally accepted in Eastern societies may not be completely true. In some studies, Japanese populations didn’t show this putative higher acceptance reporting feeling less safe around robots compared to French [20], didn’t show a higher level of comfort with robots, compared to Americans [19], or presented less positive reports on the Negative Attitudes Towards Robots Scale than other cultures [20]. This can be an effect of the aforementioned higher exposure, as having more contact with robots, Japanese may have more understanding about advantages and disadvantages of robots and might have a more realistic view on human-robot interactions (HRI) [20]. It might also be that despite a lower exposure to robots and having less experience with HRI, the Western population ends up with a more positive attitude towards the robot after interacting with them than the Eastern population [20].
Likewise, it is important to note that dividing cultural differences into Western and Eastern categories can be misleading, as these are broad generalizations and significant variations can exist within each group. For example, Italian and British participants might perceive interaction with robots differently to each other, with the latter reviewing it in a more negative way [5]. In another case, the Japanese perspective can be closer to the American's in terms of skepticism about robot’s employment, than to the Korean enthusiasm on the same matter [20].
Therefore, it is conceivable that culture can be a strong modeling factor for acceptance of ICRs, directly and indirectly, by shaping other factors identified here as relevant to provide higher acceptability. In any case, cross-cultural studies on the acceptability of ICRs need to mitigate oversimplification while accounting for cultural idiosyncrasies.
5. Possible Caveats of ICRs
As far as ICR appears to present a viable opportunity for alleviating loneliness and providing satisfaction to intimate needs, due to the machine-like nature of robots there are several caveats, outlined by multiple authors. We will now discuss these caveats, which we summarized in Table 2, below.
5.1. Technological Implications
Given that a robot is fundamentally a human-designed machine, it is prone to malfunctions that can lead to harm to the users, such as injuries known from sex toys, on a physical, biological and chemical level [6,23]. Besides that, a robot can be also vulnerable to security breaches, risking the exposure of the user's intimate data [6]. Moreover, the user's intimate data is inherently at risk, as some ICRs are equipped with cameras or connected to artificial intelligence systems, making user privacy questionable [22]. The protection of such intimate data is not yet regulated due to the specific nature of ICRs, leaving users vulnerable to data collection, either officially or through data leaks [23]. Users are also vulnerable to blackmailing by those who might have access to such data and to influence or manipulation from the robot in possession of the user’s intimate data [23,43].
5.2. Psychological and Behavioral Implications of ICR Use
A common concern in the literature is the possible negative impact of HRI with companion or sex robots on human-human interactions. As it aims at mitigating loneliness, it might achieve a paradoxical-effect of reinforcing such a state, by satisfying the user’s needs and leading them to not seek for human companions anymore, isolate themselves from society or decrease their social skills [2,6,24,25,43]. Targeting isolated or lonely people, ICRs can also turn those people into commercial targets, with their vulnerability being exploited for profit of the manufacturer, turning loneliness into a marketing strategy [26].
Human-Robot Intimacy can also reinforce unhealthy mental states by fostering deception. Users may project onto the robot human traits that it does not possess, leading to a dissociation between the objective reality and the subjective experience of the interaction [2,25]. This deception can also give users a false understanding of human interactions. It can also promote obsessive-compulsive behaviors or behaviors related to addiction from the user [43].
Due to its likely passive behavior, the robot will not reject or confront the user but will instead reinforce and meet their expectations, responding positively to the user's behavior [2,25]. This can result in decreased tolerance for relational frustrations, which are unavoidable in interactions with other humans [2]. It can always give a false impression of sexual availability and granted personalization of the sexual experience that may not be met [43].
This passive position of the robot leaves it vulnerable to abuse from the user’s side, say by violent behavior, both in sexual and non-sexual context [2,6]. Using robots to satisfy sexually violent desires may not be sustainable in the long term. Since robots cannot give or deny consent, these interactions are not truly non-consensual, which may reduce their satisfaction over time. Consequently, users might eventually seek non-consensual contact with humans [6].
Moreover, since ICR robots often possess female physical features, probably due to the perceived gendered role it performs [33], and exhibit stereotypical behaviors expected of women (e.g., serving men), interacting with such robots may foster negative attitudes towards human women, as suggested by some authors [2,6,9,43]. Interestingly, research fails to account how male representing sex robots might inflict the same damage on human men [34].
Including a robot in an existing relationship, such as using it as a sex partner, can raise concerns about increasing tensions between partners due to jealousy [11,25] or distorted expectations of human interactions. As jealousy may arise from perceived infidelity [39], it constitutes yet another harm, as infidelity is known for being harmful to monogamous relationships [40]. When it comes to sex robots, assessed perceived infidelity showed to be lower than the one towards humans but does not differ across genders when participants are clued about the robot that represents the object of infidelity [37]. If that clue was absent, men would show lower rates of perceived infidelity [37].
Additionally, it is important to consider that robots could be misused by perpetrators of domestic abuse, either as a tool to facilitate abuse against their partner or as objects of abuse themselves [27].
Lastly, when used in care-taking services, as much as they might provide people with disabilities with companionship and allow them to explore their sexuality, the type of disability should be considered. "People with cognitive impairments may struggle to distinguish a humanoid robot from a human or may not fully understand or appreciate their actions, potentially rendering them incapable of giving informed consent [9]. This vulnerability puts them at risk of exploitation and abuse.
In sum, ICR can be a viable alternative for people deprived of social contact. However, it is necessary to treat the established relations with caution, as the robot’s non-human nature may lead to its misuse and deceive the user to be less tolerant toward human behaviors and interactions.
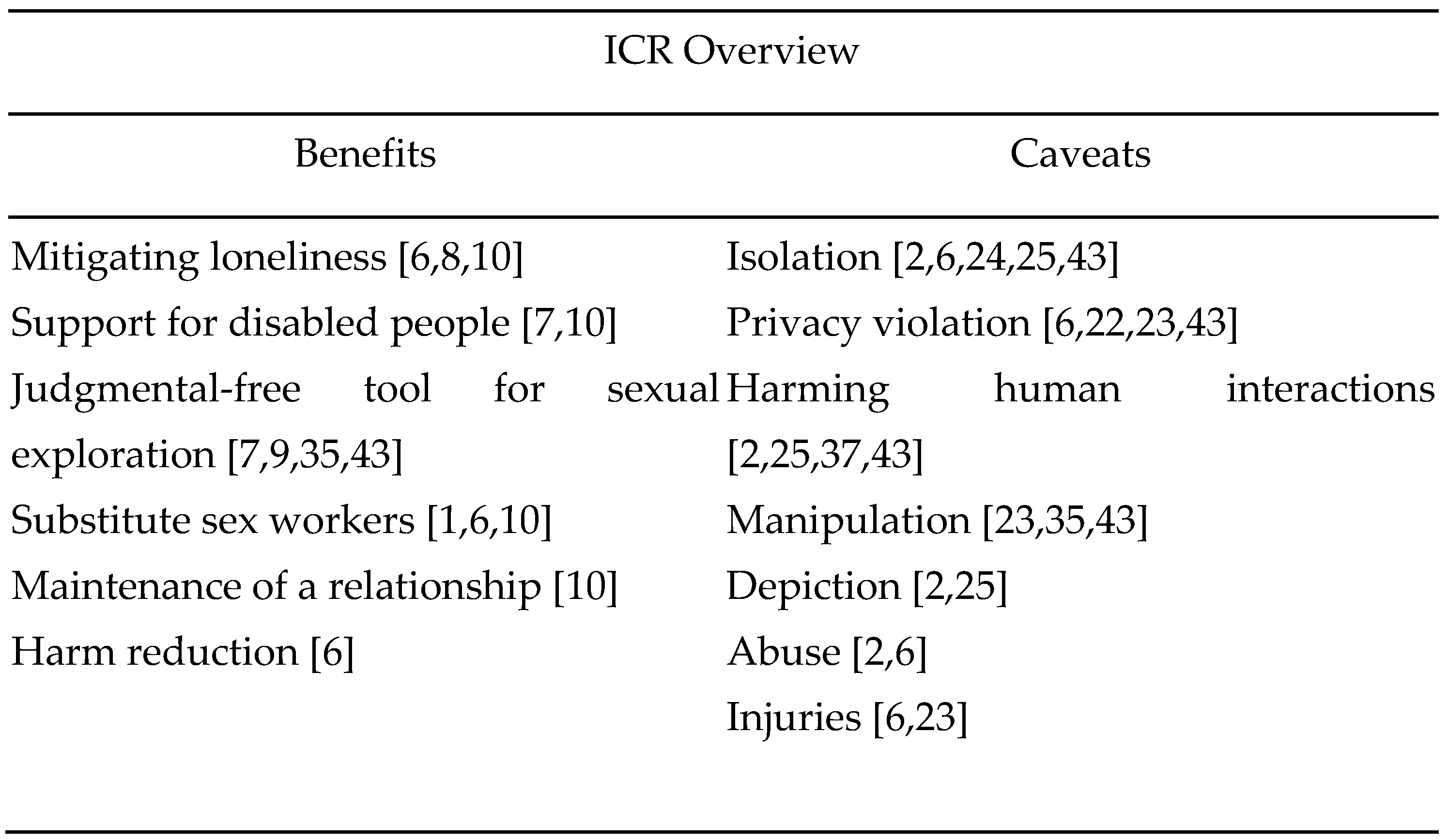
Table 2.
An overview on ICR, in terms of its identified/possible benefits and caveats.
6. Conclusions
Forming bonds with robots is an alternative approach to current issues related to loneliness and isolation that some groups can face. It can also be an aid for spreading awareness about sexual education, abuse and violent sexual behaviors, or replacing sex workers who might not be protected by law.
It is thus important to understand how to best get this connection and how to make it safe and ethical. For that, more research is needed to better understand how HRI can impact and alter human behavior and human relations. Establishing an ethical framework for HRI is also necessary to prevent abuse of vulnerable groups but also avoid abuse towards robots, that could later be translated into abuse towards human peers.
We analyzed factors that could interfere with this bonding, through acceptance of humanoid robots and intimacy with them. Literature suggests that cultural context is crucial in HRI. It not only influences the type of interaction and level of acceptance but also shapes other factors that enhance HRIs, such as exposure to robots, expectations of robot behavior, and preferred robot appearance. Moreover, the closer the cultural context is between the user and the robot, the better ICR is accepted.
There is still a need for more research in terms of different cultural contexts and robot acceptance, accounting for distinctions within traditional cultural clusters (for example, Western and Eastern) and individual differences (e.g., personality traits and experience). Understanding where individual differences are rooted in is also crucial and yet not much explored, calling for further investigation of this topic. Research on ICR should also delve into African and South-American cultures that comprise Western societies as well.
We believe that research on ICRs regardless of cultural taboos is needed in order to mitigate future risks coming with the unavoidable introduction of robots into all, even most intimate, spheres of human life.
Author Contributions
SB: CK and AP drafted and reviewed the article.
Funding
This research was funded by Bial Foundation, grant number 260/22.
Conflicts of Interest
“The authors declare no conflicts of interest.”.
References
- D. Levy, "Love and sex with robots: The evolution of human-robot relationships," New York, 2009, p. 352.
- N. Massa, P. Bisconti, and D. Nardi, "The psychological implications of companion robots: a theoretical framework and an experimental setup," International Journal of Social Robotics, vol. 15, no. 12, pp. 2101-2114, 2023.
- World Health Organization, "Social isolation and loneliness among older people: advocacy brief," 2021.
- J. M. Twenge, J. Haidt, A. B. Blake, C. McAllister, H. Lemon, and A. Le Roy, "Worldwide increases in adolescent loneliness," Journal of Adolescence, vol. 93, pp. 257-269, 2021.
- R. Moberg and A. Khan, "Humanoid Robot Acceptance: A Concise Review of Literature," in 2022 International Conference on Computational Science and Computational Intelligence (CSCI), 2022, pp. 1223-1228.
- K. R. Hanson and C. C. Locatelli, "From sex dolls to sex robots and beyond: A narrative review of theoretical and empirical research on human-like and personified sex tech," Current Sexual Health Reports, vol. 14, no. 3, pp. 106-117, 2022.
- E. Fosch-Villaronga and A. Poulsen, "Sex robots in care: Setting the stage for a discussion on the potential use of sexual robot technologies for persons with disabilities," in Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, Mar. 2021, pp. 1-9.
- H. Robinson, B. MacDonald, N. Kerse, and E. Broadbent, "The psychosocial effects of a companion robot: a randomized controlled trial," Journal of the American Medical Directors Association, vol. 14, no. 9, pp. 661-667, 2013.
- Bianchi, “Considering sex robots for older adults with cognitive impairments”. Journal of medical ethics, vol. 47, no 1, pp. 37-38, 2021.
- M. Scheutz and T. Arnold, "Are we ready for sex robots?," in 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), March 2016, pp. 351-358. [CrossRef]
- M. Nordmo, J. Ø. Næss, M. F. Husøy, and M. N. Arnestad, "Friends, lovers or nothing: Men and women differ in their perceptions of sex robots and platonic love robots," Frontiers in Psychology, vol. 11, 2020, Article 501020. [CrossRef]
- Edirisinghe, A. D. Cheok, and N. Khougali, "Perceptions and Responsiveness to Intimacy with Robots; A User Evaluation," Lecture Notes in Computer Science, vol. 10715, pp. 138-157, 2018. [CrossRef]
- J. K. Rempel, J. G. Holmes, and M. P. Zanna, "Trust in close relationships," Journal of Personality and Social Psychology, vol. 49, no. 1, p. 95, 1985.
- X. Zheng, M. Shiomi, T. Minato, and H. Ishiguro, "How can Robots make people feel intimacy through Touch?," Journal of Robotics and Mechatronics, vol. 32, no. 1, pp. 51-58, 2020. [CrossRef]
- M. Mori, K. F. MacDorman, and N. Kageki, "The uncanny valley [from the field]," IEEE Robotics & Automation Magazine, vol. 19, no. 2, pp. 98-100, June 2012.
- J. Willemse, A. Toet, and J. B. Van Erp, "Affective and behavioral responses to robot-initiated social touch: toward understanding the opportunities and limitations of physical contact in human–robot interaction," Frontiers in ICT, vol. 4, Article 12, 2017. [Online]. Available: . [CrossRef]
- Collins English Dictionary, "Waifu," Accessed: 10-Jun-2024. [Online]. Available: https://www.collinsdictionary.com/dictionary/english/waifu.
- Sakura, "Robot and ukiyo-e: implications to cultural varieties in human–robot relationships," AI & Soc, vol. 37, pp. 1563–1573, 2022. [CrossRef]
- N. Castelo and M. Sarvary, "Cross-cultural differences in comfort with humanlike robots," International Journal of Social Robotics, vol. 14, no. 8, pp. 1865-1873, 2022.
- V. Lim, M. Rooksby, and E. S. Cross, "Social robots on a global stage: establishing a role for culture during human–robot interaction," International Journal of Social Robotics, vol. 13, no. 6, pp. 1307-1333, 2021.
- P. Mundy and W. Jarrold, "Infant joint attention, neural networks and social cognition," Neural Networks, vol. 23, no. 8-9, pp. 985-997, 2010.
- Bendel, "Love dolls and sex robots in unproven and unexplored fields of application," Paladyn, Journal of Behavioral Robotics, vol. 12, no. 1, pp. 1-12, 2021. [CrossRef]
- S. E. Galaitsi, C. O. Hendren, B. Trump, and I. Linkov, "Sex robots—a harbinger for emerging AI risk," Frontiers in Artificial Intelligence, vol. 2, p. 27, 2019.
- N. Döring and S. Pöschl, "Sex toys, sex dolls, sex robots: Our under-researched bed-fellows," Sexologies, vol. 27, no. 3, pp. e51-e55, 2018.
- J. Borenstein and R. Arkin, "Robots, ethics, and intimacy: the need for scientific research," in On the Cognitive, Ethical, and Scientific Dimensions of Artificial Intelligence: Themes from IACAP 2016, 2019, pp. 299-309.
- S. Nyholm and L. E. Frank, "It loves me, it loves me not: Is it morally problematic to design sex robots that appear to love their owners?" Techne: Research in Philosophy & Technology, vol. 23, no. 3, 2019.
- K. Winkle and N. Mulvihill, "Anticipating the Use of Robots in Domestic Abuse: A Typology of Robot Facilitated Abuse to Support Risk Assessment and Mitigation in Human-Robot Interaction," in Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, 2024, pp. 781-790.
- Marečková et al., “Men with Paraphilic Interests and Their Desire to Interact with a Sex Robot,” 1 Jan. 2022, pp. 39-48.
- G. Ara, S. Veggi, and D. P. Farrington, "Sexbots as Synthetic Companions: Comparing Attitudes of Official Sex Offenders and Non-Offenders," Int. J. Soc. Robotics, vol. 14, pp. 479–498, 2022. [CrossRef]
- P. Uluer, H. Kose, B. K. Oz, T. C. Aydinalev, and D. E. Barkana, "Towards an affective robot companion for audiology rehabilitation: How does pepper feel today?," in 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2020, pp. 567-572.
- Kuo, J. M. Rabindran, E. Broadbent, Y. I. Lee, N. Kerse, R. M. Stafford, and B. A. MacDonald, "Age and gender factors in user acceptance of healthcare robots," in RO-MAN 2009 - The 18th IEEE International Symposium on Robot and Human Interactive Communication, 2009, pp. 214-219.
- W. Johal, S. Pesty, and G. Calvary, "Towards companion robots behaving with style," in The 23rd IEEE International Symposium on Robot and Human Interactive Communication, 2014, pp. 1063-1068.
- S. Alesich and M. Rigby, "Gendered robots: Implications for our humanoid future," IEEE Technology and Society Magazine, vol. 36, no. 2, pp. 50-59, 2017.
- Hancock, "Should society accept sex robots? Changing my perspective on sex robots through researching the future of intimacy," Paladyn, Journal of Behavioral Robotics, vol. 11, no. 1, pp. 428-442, 2020.
- Koumpis and T. Gees, "Sex with robots: a not-so-niche market for disabled and older persons," Paladyn, Journal of Behavioral Robotics, vol. 11, no. 1, pp. 228-232, 2020. [CrossRef]
- S. Dubé, M. Santaguida, C. Y. Zhu, S. Di Tomasso, R. Hu, G. Cormier, and D. Vachon, "Sex robots and personality: It is more about sex than robots," Computers in Human Behavior, vol. 136, p. 107403, 2022.
- N. J. Rothstein, D. H. Connolly, E. J. de Visser, and E. Phillips, "Perceptions of infidelity with sex robots," in Proceedings of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, 2021, pp. 129-139.
- M. Appel, C. Marker, and M. Mara, "Otakuism and the appeal of sex robots," Frontiers in Psychology, vol. 10, p. 569, 2019.
- M. Buss and M. Haselton, "The evolution of jealousy," Trends in Cognitive Sciences, vol. 9, no. 11, pp. 506-506, 2005.
- D. Fincham and R. W. May, "Infidelity in romantic relationships," Current Opinion in Psychology, vol. 13, pp. 70-74, 2017.
- T. Oleksy and A. Wnuk, "Do women perceive sex robots as threatening? The role of political views and presenting the robot as a female-vs male-friendly product," Computers in Human Behavior, vol. 117, p. 106664, 2021.
- Z. Deniztoker, "Lovotics and the big-five: An exploration of the psychology of human-robot intimacy," in 7th International Student Research Conference - ISRC, Prague, Czech Republic, 2019.
- S. Dubé and D. Anctil, "Foundations of Erobotics," International Journal of Social Robotics, vol. 13, pp. 1205-1233, 2021. [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



