
Submitted:
18 July 2024
Posted:
19 July 2024
You are already at the latest version
Abstract
This study uses simulation and experimental methodologies to explore the efficacy of bi-sectional horizontal kinetic shading systems (KSS) featuring horizontal fins in enhancing daylight comfort across various climates. Given the increasing energy demands and shifting climatic patterns, optimizing daylight levels while minimizing solar heat gain is vital. The paper introduces a bespoke horizontal bi-sectional KSS, simulated in three distinct climates—Wroclaw, Tehran, and Bangkok—using Climate Based Daylight Modelling methods with Ladybug and Honeybee tools in Rhino software. The study employs standard daylight metrics such as Useful Daylight Illuminance (UDI) and Daylight Glare Probability (DGP), along with custom metrics designed to capture the specific dynamics of the bi-sectional KSS. Initial simulations indicated that the KSS significantly improved daylight distribution and uniformity, reducing glare and over-illumination risks by av. 42.34%. Including KSS switching schedules, which are seldom detailed in similar research, enhances the reproducibility and understanding of findings. Subsequently, a physical reduced-scale mock-up of the bi-sectional KSS was tested under real-weather conditions in Wroclaw (lat. 51° N) during June-July 2024. The mock-up utilized two chambers: one equipped with the prototype of bi-sectional KSS and the second without any protection. The operation of fins was guided by two stepper motors controlled by a Python script running on a Raspberry Pi 3 minicomputer. The control chamber served to benchmark the bi-sectional KSS's efficiency by providing results that would be expected if no shading system were installed. The experimental outcomes supported the simulations, demonstrating the KSS's robustness in reducing high illuminance levels to the target comfort level, thus enhancing indoor visual comfort. The values below 3,000 lux were maintained for 68% of the time. However, it must be explicitly stated that during the June-July 2024 heat waves, the illuminance levels inside the test room momentarily exceeded the comfort threshold of 3,000 lux, reaching up to 4,674 lux. Through quantitative and qualitative analyses, the paper advocates for the broader application and further development of KSS as a climate-responsive shading system in diverse architectural contexts.
Keywords:
kinetic shading systems (KSS)
; daylight comfort
; climate-based daylight modelling (CBDM)
; sustainable building design
; visual comfort
; adaptive building facades
; environmental control systems
1. Introduction
Buildings account for about 40% of global energy use [1]. As the shift to renewable energy is a worldwide endeavour, achieving the goal of 100% clean energy still remains a question for the future. This means that every effort to cut energy use reduces carbon emissions and helps meet climate goals, like Goal 7: Affordable and Clean Energy, issued by the United Nations in 2015 as part of the 2030 Agenda for Sustainable Development [2].
1.1. Background
As greenhouse gases accumulate in the atmosphere, our global climate is experiencing unprecedented shifts, resulting in new weather patterns and more frequent extreme events [3]. While mitigating these changes through emissions reduction is critical, the reality is that the trajectory of climate change has already set in motion a series of consequences. Those impacts are increasingly evident, from devastating storms and prolonged droughts to rising sea levels and unpredictable temperature changes. Despite efforts to mitigate emissions, the climate system's inertia means we will continue to face the effects of past and present actions. Therefore, it is essential to develop climate-responsive design solutions that withstand these evolving conditions and proactively adapt to them. This involves optimizing building designs and urban planning to respond dynamically to climatic changes, enhancing responsiveness and sustainability. By integrating adaptive strategies, such as responsive kinetic shading systems and energy-efficient technologies, we can mitigate the impacts of extreme weather events and long-term climatic shifts, ensuring more resilient and sustainable built environments.
1.2. Solar Energy and Daylight
Solar energy, made up of almost equal amounts of light and heat (50% visible light and 50% infrared radiation), offers a unique opportunity to save energy. Managing daylight effectively can significantly reduce direct sunlight entering buildings, lowering the heat gain and need for air conditioning. This not only improves comfort for occupants but also reduces energy costs. Furthermore, using energy-efficient technologies and smart design in architecture can enhance the use of daylight. Shading devices can help buildings manage light and temperature effectively, promoting sustainability and reducing carbon footprint on lighting and cooling.
Daylight is essential for human functioning, regulating circadian rhythms and stimulating the production of hormones and vitamins. In the workplace, daylight is generally seen as a benefit for visual comfort, though excessive direct sunlight can cause glare and overheating. Scientific consensus holds that direct sunlight on the work plane should be minimized. For instance, the LEED 4.0 standard limits direct sunlight on the work plane to 250 hours per year, as measured by the Annual Solar Exposure (ASE) metric. Modern office buildings often feature floor-to-ceiling glazing, which can lead to excessive sunlight exposure, especially in south-facing rooms. To mitigate this, shading systems are employed to limit direct sunlight while ensuring adequate diffused light.
1.3. Kinetic Shading Systems
Shading systems have a long history in building design, showing people's ongoing efforts to control indoor lighting. Various methods have been used, from simple solutions like curtains and fabrics to more advanced ones like Venetian blinds with adjustable slats. However, these traditional systems often require manual operation. Thus, in the 1970s, the concept of adaptive facades emerged, offering automated responses to environmental conditions [4]. Over time, it became clear that these adaptable systems effectively regulate daylight, leading to their widespread use in building design. Adaptive facade systems contain various technologies, such as glazing with adjustable transparency or adaptive wall insulation. Kinetic shading systems (further abbreviated KSS) stand out within this larger category of adaptive facades, using mechanical elements to regulate sunlight, as seen in the iconic mechanical facade of the Arab World Institute in Paris, see Figure 1.
As the weather patterns change, KSSs are helpful because they can quickly adapt to the larger number of clear days and heat waves, providing better protection and comfort. In the context of climate resilience, KSSs are offering the following tools:
- Dynamic adaptation to environmental changes: KSSs offer dynamic adjustment to variations in sunlight and temperature, mitigating the impact of extreme weather events and temperature fluctuations;
- Adaptation to shifting climate patterns: KSSs optimize natural light levels while reducing reliance on artificial lighting and excessive air conditioning, thus adapting to changing climate patterns;
- Reduction of urban heat island effects: By limiting solar heat gain in densely populated areas, KSSs mitigate urban heat island effects and prevent overheating in urban environments;
- Enhancement of building resilience: KSSs protect against wind and debris during climate change-induced storms and extreme weather events, enhancing building resilience by design;
- Adaptive protection against extreme weather events: As climate change challenges urban environments, KSSs offer adaptive solutions for creating sustainable and resilient built environments, ensuring protection against extreme weather events.
Despite significant research interest, implementing KSSs has been limited over the years due to the following selected challenges that must be explicitly outlined:
- Complicated mechanism prone to malfunction: KSSs involve complex mechanical components and advanced technology, making them prone to breakdowns and operational issues. These can result in frequent malfunctions, requiring specialized repair services.
- Higher construction costs: Installing KSSs demands advanced engineering and high-quality materials, significantly increasing the initial construction expenses. These systems are more complex than traditional shading solutions, contributing to their higher cost.
- High cost of regular maintenance: Due to their sophisticated design and technology, KSSs require regular maintenance to ensure they function correctly. This maintenance is often costly, involving specialized technicians and replacing high-tech components.
- Blocking the view when the system is in "shade" mode: When KSSs are activated to provide shade, they can obstruct views from windows, which might be undesirable for building occupants who value natural light and an unobstructed outdoor view.
- Potentially limiting the beneficial greenhouse effect in temperate climates during winter: In temperate climates, some sunlight is beneficial during winter as it helps to warm the building naturally. KSSs can reduce this beneficial greenhouse effect by limiting the amount of direct sunlight entering the building during these colder months.
However, these obstacles should not discourage further exploring and developing KSSs because those systems have a high potential to improve the building's performance.
The author of the presented paper recently analyzed a vertical fin shading system in low winter solar altitudes in November 2023 [5]. While this system was found to be quantitatively efficient in equalizing the level of scattered daylight in the room, it failed qualitatively by not mitigating glare, highlighting a critical issue in balancing light management and visual comfort. The next stage of the research is dedicated to horizontal fin KSS.
1.4. Horizontal Orientation of Fins
While KSSs have evolved into diverse forms, including vertical and horizontal louvres or slats, previous research has demonstrated that horizontal fins are the most effective for south-facing facades, as proved by Alzoubi and Al-Zoubi [6]. This is because they can counteract high solar altitudes by efficiently blocking direct sunlight from entering the room, enhancing visual comfort and reducing solar heat gain. Horizontal shading systems are not only effective for south-facing facades but can also provide benefits in various climate zones. For example, in temperate regions, they can help control solar heat gain and glare during the summer months while allowing for passive solar heating in the winter.
1.5. Objective
This paper aims to demonstrate the effectiveness of horizontal bi-sectional KSS in improving visual comfort across diverse climate zones, including hot and arid, temperate, and hot and humid regions. Through a combination of simulation and experimental analysis, this study aims to provide evidence of the ability of bi-sectional KSS to enhance visual comfort in varying climatic conditions, thereby contributing to the understanding and advancement of sustainable building design practices and proving the climate resilience of the presented bi-sectional KSS.
2. State of the Art
The author examined the current knowledge and practices related to adaptive systems in general and KSSs in particular. This review thoroughly summarises the existing studies, methods, technologies, and uses, along with the gaps, challenges, and opportunities for future research.
2.1. Review Method and Eligibility Criteria
Data for this review were sourced from international databases (WoS and Scopus, with the last search on 1 June 2024). The author looked for specific keywords in titles and abstracts. The search included terms like "kinetic facade," "adaptive facade," and "daylight," focusing on studies that simulated shading elements. References from previously reviewed papers were also considered.
The selection process involved multiple steps. Initially, the author (MB) reviewed titles and abstracts to identify studies focusing on topics related to "adaptive" and "kinetic" facades, which have been used in building engineering over the last two decades. Titles and abstracts from 2019 to 2023 were first examined, with duplicates removed. This process resulted in identifying 78 papers, of which 56 were chosen for further examination, ultimately including 28 papers in the literature review. Table 1 and Table 2 present a comparison of various methods and conclusions from different research teams, and the primary review method was an online desk study without the use of automated tools.
2.2. Adaptive Facades
KSSs are part of a broader trend in the larger "adaptive facades" domain. Adaptive facades contain all systems that adjust their parameters based on external environmental conditions. Examples of systems proposed by various authors include (i) glass of variable transparency, (ii) dynamic wall insulation, (iii) flat tanks with liquid that change transparency [7], and (iv) systems using phase change materials [8]. The Adaptive Facade Network program COST TU 1403, which took place from 2016 to 2018, significantly contributed to research on adaptable facades [9]. Additionally, two review papers are worth mentioning: one by AlDakheel in 2017 [10], which concluded that the most-used system is electrochromic, and another by Premier in 2019, which analyzed 51 case studies [11].
Since adaptive technologies are still early, KSSs are a viable alternative to regulate room daylight. Unlike adaptive systems, kinetic systems use mechanical parts like flaps, fins, louvres, and retractable rollers moved by motors or actuators. Movements can involve translation, rotation, folding, or combinations. One early kinetic system, installed in 1988 at the Museum of Arab World in Paris, used complex diaphragms powered by electric motors but was prone to malfunction and is now and is now being restored, see Figure 1. The issues of the mechanical motion of KSSs were recently studied by the author in the review paper published in journal “Sustainability” [12].
2.3. Kinetic Shading Systems
This chapter reviews studies on kinetic facades, a subset of adaptive facades using mechanical parts to control daylight. Adriaenssens et al. (2014) studied a shading system with flexible shells bending to adjust opacity, reducing actuation needs [13]. Chan et al. (2015) analyzed a multi-sectional facade with light shelves, roller shades, and Venetian blinds, finding energy savings and cooling load reduction benefits [14]. Wanas et al. (2015) studied kinetic facades in Egypt with rotating and vertically moving shading louvres, increasing daylit zones significantly [15]. Lee et al. (2016) developed a model for heat transfer and daylight lighting for external shading devices [16]. Cimmino et al. (2017) explored tensegrity structures in kinetic facades but did not provide adequate data [17]. Sheikh et al. (2019) proposed an adaptive biomimetic facade, reducing HVAC and lighting energy by 27–32% [18]. Grobman et al. (2019) studied vertical, horizontal, and diagonal fins, finding dynamic louvres performed 6–34% better [19]. Damian et al. (2019) presented a heat balance analysis for office buildings with KSS, showing annual cooling load reductions of 36.9 to 42.8% [20]. Luan et al. (2021) proposed a KSS inspired by origami, significantly reducing cooling energy [21]. Hosseini et al. (2021) reviewed various KSS, advocating for a generative-parametric method to respond to climate fluctuations [22]. Sankaewthong et al. (2022) studied a kinetic twisted facade, showing it filtered daylight effectively [23]. Globa et al. (2022) analyzed a hybrid kinetic facade, providing a life cycle assessment but not performance data [24]. Anzaniyan et al. (2022) concluded that bio-kinetic facades reduced electric lighting loads by about 48% [25]. See Table 1.
2.4. The most Recent Studies
The increase in recent studies on KSSs reflects a growing interest and recognition of their potential in architectural design and environmental sustainability. As the discipline gains momentum, researchers are increasingly exploring innovative solutions to harness the benefits of kinetic elements in building facades. In the context of presenting a novel louvre-based system by the author, it's important to focus specifically on studies that align with this approach. Louvres, fins, slats, and similar solutions offer versatile and effective means of controlling daylight, reducing heat gain, and enhancing visual comfort within buildings. The analysis can provide a more targeted and comprehensive understanding of the advancements and challenges in louvre-based KSSs by narrowing the scope to include studies specifically related to these elements.
Sharma and Kaushik conducted a thorough investigation into the effectiveness of both vertical and horizontal louvres in enhancing visual comfort metrics. Their study provided valuable insights into the impact of louvre orientation on daylighting and glare control, highlighting the importance of optimal slat configurations [26]. Mangkuto et al. focused on analyzing horizontal louvre systems, particularly in tropical climates, to meet the stringent requirements of LEED v 4.1. Their study emphasized the necessity of determining optimal slat configurations to achieve desired daylight metrics while ensuring energy efficiency [27]. Catto Luchino and Goia explored the application of horizontal louvre systems in the context of double-skin facades. Their analysis contributed to developing control strategies for optimizing the performance of louvre-based KSSs in different architectural contexts [28]. Hassooni and Kamoona analyzed a horizontal louvre system installed in a hospital in Najaf, Iraq. Their study highlighted the effectiveness of deep louvres rotated at various angles in reducing radiation exposure levels, demonstrating the practical application of louvre-based kinetic facade systems in healthcare environments [29]. Shen and Han analyzed two modular KSSs: a conventional horizontal louvre shading system and a deformable triangular shading element. The study evaluated the performance of these systems in terms of daylighting and glare control, showcasing the potential of modular control strategies for enhancing kinetic facade functionality [30]. Ożadowicz and Walczyk conducted an experimental study of a horizontal louvre system installed in Poland featuring perovskite PV installations. The research focused on optimizing louvre configurations to maximize energy production yield while effectively managing thermal and illuminance levels, contributing to the advancement of sustainable building design strategies [31]. De Bem et al. presented a low-cost responsive KSS prototype based on horizontal louvres. Evaluation of the system in a bioclimatic building chamber underscored its effectiveness in improving thermal and illuminance management, highlighting the potential of responsive louvre-based kinetic facade systems in enhancing indoor environmental quality [32]. The team led by Kim et al. at Chonnam National University analyzed advanced horizontal louvres made of electrochromic modules that adjust their transmittance, functioning like standard louvres when open and mimicking a double-skin façade when closed, achieving LEED v4.1 daylight criteria with 40-45% transmittance [33]. Additionally, Norouziasas et al. evaluated the new ISO/DIS 52016-3 standard for adaptive façade simulations, finding that fixed horizontal shading performed better than dynamic Venetian blinds, which were controlled according to the ISO/DIS 52016-3 algorithm [34]. In 2024, the author of the presented study published an article addressing the vertical KSS verified by simulation and experimental validation. The study proved the quantitative efficiency of the tested KSS while failing in terms of qualitative metrics [5].
Motion-based KSSs, leveraging shape-memory and bi-stable flexible materials, have also attracted significant attention from researchers. Naeem et al. explored the reduction of cooling loads using shape-memory alloy (Nitinol) springs integrated into shading louvres. Their research demonstrated the potential of shape-memory alloy springs to enhance thermal comfort and reduce energy consumption in buildings [35]. Vazquez and Duarte conducted experimental research on bi-stable flexible materials actuated by shape-memory alloy (SMA). Their study focused on developing control strategies for optimizing flap positions in bi-stable KSS, offering innovative solutions for adaptive building envelopes [36]. See Table 2.
The tables above provide a comprehensive overview of seminal research in KSSs from 2014 to 2024. Key themes include the integration of solar protection and adaptive design strategies. Many studies emphasize the need for practical implementation and real-world testing. Notably, research gaps focus on the scalability, environmental impacts, and long-term effectiveness of KSSs, emphasizing a need for detailed performance analysis and broader applicability in diverse climatic conditions.
3. Bi-sectional KSS Design Description
The proposed bi-sectional KSS was designed to shade a 4.0×4.0 m southern facade in an office room with 4.0×8.0 m plan dimensions. The bi-sectional KSS system consists of six kinetic fins that are rotated around an eccentric axis located along the longer edge of the fins. The fins are 66 cm wide and 380 cm long. The system is mounted in a supporting frame with a depth equal to the width of the fins. The exact geometry of the system is presented in Figure 2.
Uniquely, the six fins are divided into two groups of three, with fins number 1-3 and number 4-6 capable of being closed independently based on a schedule derived from measurements of internal illuminance levels. This distinctive feature is hoped to precisely mitigate excessive illuminance near the glazing while maximizing daylight penetration into the deeper areas of the room.
The design of the bi-sectional KSS represents a novel approach to facade technology, offering unparalleled control over daylight comfort and energy efficiency. Fins numbered 1-3 in the system will be further referred to as 'lower fins', while fins numbered 4-6 will be referred to as 'upper fins'. The angle of inclination for the lower fins will be denoted as 'αdn', and for the upper fins, it will be denoted as 'αup'.
3.1. Façade Closure Scheme
The façade closure scheme (FCS) plays a pivotal role in controlling the performance of the bi-sectional KSS; this is an algorithm according to which the kinetic behaviour of the façade is managed. This study determines the FCS based on the illuminance levels inside the office room. A single sensor, designated as sensor ‘A’, is strategically positioned in the middle of the room at 1.5 m. from the façade, both in the simulation and the experiment (sensor ‘A1’). Sensor ‘A’ was selected for its location, which initial simulations revealed to be critical for achieving optimal visual comfort due to elevated illuminance levels.
The LEED v.4 standards outline visual comfort limit values, with the upper threshold selected for reference – 3,000 lux, which would be further called a "trigger value". The FCS operation is as follows: when the illuminance value detected by sensor ‘A’ is below 3,000 lux, both groups of facade fins remain open (perpendicular to the facade, the angle is 0° relative to the facade's normal – KSS configuration ‘open’). If the detected illuminance value exceeds this threshold, the lower fins are automatically rotated to reduce illuminance levels at sensor ‘A’ – KSS configuration ‘down-closed’. Subsequently, if the illuminance value at sensor ‘A’ again rises above 3,000 lux, the upper fins are rotated to mitigate excessive illuminance levels further – KSS configuration ‘all-closed’. The groups of fins are rotated at αdn and αup angles, which can only be either 0° or 60° degrees relative to the facade's normal. The fins are never fully closed. The FSC does not typically specify full closure of the fins, but this option may be used for facade protection during extreme climate events. See Figure 3.
The FCS was simplified because the daylight simulation software operates in 1-hour increments; therefore, there is insufficient temporal resolution (e.g. the number of sun-hours in Wroclaw in the winter is only 8). Analyzing all the intermediate angles would significantly complicate the algorithm and increase the computational load. Simplifying the angles to only 0° and 60° reduces the complexity, making the simulation more efficient and faster to run. It also minimizes potential errors that could arise from handling a wide range of angles, ensuring more reliable and consistent outcomes in the daylight analysis.
In this study, the "trigger value" is the illuminance level E h measured by sensor ‘A’. Still, other environmental parameters, such as global horizontal irradiance (GHI) measured outside the Test Room, may also be used. However, the illuminance measured inside the Test Room is preferred as a "trigger value" because it considers the changes of illuminance already altered by the horizontal fins of the bi-sectional KSS. At the same time, GHI only depends on solar irradiance and solar position.
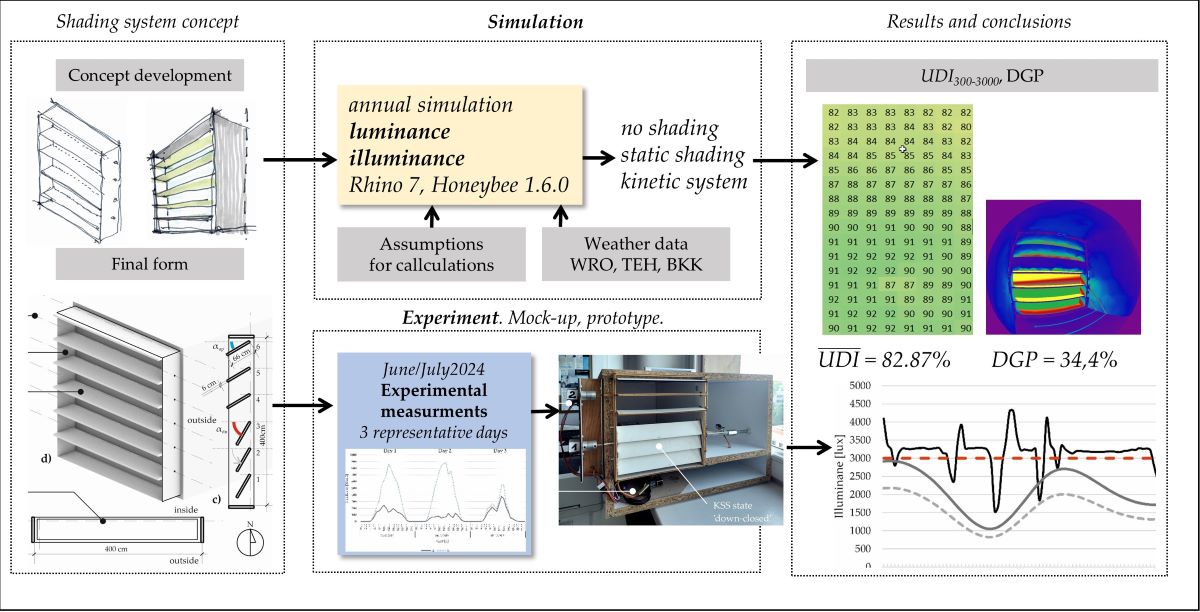
3.1. Method
The author performed two types of analyses on the proposed bi-sectional KSS:
- The first phase involved an annual UDI300–3000 and glare simulation using standardized weather data for the specified locations sourced from the EnergyPlus database. This phase examined three geometrical configurations of the KSS (open, down-closed, all closed) working according to the FCS.
- The second phase consisted of experimental illuminance measurements on selected June/July 2024 days in Wroclaw, Poland (lat. 51°). These measurements were conducted using a south-facing, reduced-scale 1:20 mock-up of the bi-sectional KSS facade mounted on a testbed specifically designed for daylight measurement. Figure 4 illustrates the schematic diagram of the methodology.
The methods section will be divided into two parts and presented in the corresponding chapters. The first part will detail the simulation methodology, focusing on the computational analysis conducted to assess the performance of the bi-sectional KSS. The second part will outline the experimental design, describing the setup and procedures implemented to validate the simulation results and evaluate the practical feasibility of the shading system in real-world conditions.
The combined approach of simulation and experimentation allowed for a thorough evaluation of the bi-sectional KSS's effectiveness in improving daylight comfort and climate resilience across diverse climatic contexts.
4. Simulation
Daylight simulation was conducted using the Climate Based Daylight Modelling (CBDM) method, a standard practice in sustainable architectural design.
4.1. Simulation Method
The author utilized Rhino, version 7, to model the virtual office Test Room and the proposed KSS. Daylight simulations were conducted using the Ladybug/Honeybee 1.6.0 plugin with the Radiance daylight simulation engine. This tool's reliability has been confirmed by numerous prior studies, such as those by Reinhart and Walkenhorst [37], Ng et al. [38], and Yoon et al. [39]. In a 2020 publication in the journal Solar Energy, Kharvari validated the accuracy of the Honeybee/Ladybug plugin for Rhino through experimental validation of the Radiance computational engine embedded in Ladybug, using "grid analyses under an overcast sky with a certain illuminance level" [40]. Kharvari's findings showed that the average difference between calculated and measured illuminance levels for all points was 9%, and the average room illuminance level was 2%. These results indicate that Radiance accurately estimates the overall illuminance level on the analysis grid. Kharvari concluded, "[…] Radiance is still the most powerful and accurate tool for predicting illuminance levels in buildings." [40]. Furthermore, Reinhart and Andersen demonstrated that translucent materials "can be modelled in Radiance with an even higher accuracy than was demonstrated earlier […]" [41].
In computer simulation using the Radiance/Honeybee plugin, variable geometry models are not possible, e.g., it is impossible to automatically model a fin at a different angle for different sun-hours. This obstacle is addressed using a method proposed by Ch. Reinhart in the "Daylighting Handbook II" [42]. The method involves calculating illuminance levels for discrete states of the KSS (e.g., open, down-closed, all closed) and then using a code or formula to determine the correct values for each sun-hour of the year based on the "trigger value". A similar approach was suggested by Do and Chan in 2018 [43].
Following the above, the so-called discrete state illumination method (DSIM) was employed to simulate the operation of bi-sectional KSS. This approach simulates illuminance values for each discrete state of the bi-sectional KSS for an entire year—4,400 sun-hours (the exact number differs regarding location). The results are then integrated by a script that assigns a specific facade state and corresponding illuminance values to every sun-hour of the year based on predefined criteria. In the presented research, the criterion is the internal horizontal illuminance level Eh at the virtual sensor ‘A’. This comprehensive method allows for an in-depth analysis of how different facade configurations impact daylight performance throughout the year.
The model was validated by calculating CV (RMSE); however, obtaining more data over a longer measurement period will further enhance the robustness of this validation. See Appendix A.
4.2. Simulation Setup for UDI300-3000 and DGP
The simulation focused on a standard office Test Room measuring 4×8 meters with a height of 4 meters, oriented directly southward to represent typical office building configurations. The Test Room is side-lit by a large glazing that spans from the floor to the ceiling. The bi-sectional KSS is mounted outside. All the optical parameters of the materials are provided in Table 3. The illuminance levels are calculated for a work plane located at a height of 0.85 meters above the floor, using a grid of 0.5×0.5 m with 128 sensors. A single virtual sensor, labelled ‘A,’ positioned centrally 1.5 meters from the glazing, was selected to provide illuminance values that served as the "trigger value" for switching the states of the bi-sectional KSS, as shown in Figure 5.
The simulation was run for every day of the year to ease the presentation of switching schedules for the bi-sectional KSS. While it is customary to analyze office rooms only for weekdays, extending the analysis to include all days of the year offers a comprehensive understanding of the system's performance across different seasonal variations and weather conditions. Since different cultures and calendars may have different conventions for the start of the year, analyzing switching schedules for every day of the year ensures a comprehensive assessment of the system's performance across all possible scenarios.
4.3. Climate and Location Variants
Simulation studies assessed the bi-sectional KSS's performance in three distinct climate conditions: (i) Wrocław, Poland (51.1° N), (ii) Tehran, Iran (35.7° N) and (iii) Bangkok, Thailand (13.8° N). The cities are always ordered according to the geographical location (from the northernmost to the southernmost). Climate data for each location were obtained from *.epw standard weather files from the EnergyPlus library and fed into the Honeybee Radiance plugin within the Grasshopper/Rhino software version 1.6.0 [44].
The selected climates were intentionally diverse, covering a range of factors relevant to daylight analysis. Specifically, the diversity across the three climate zones is characterized by (i) variations in latitude, leading to distinct sun paths and solar altitude angles; (ii) differences in cloud coverage, with Tehran experiencing the clearest skies; (iii) variations in GHI, with Tehran exhibiting the highest values and Wroclaw the lowest; (iv) discrepancies in the number of clear days experienced in each climate zone. These factors collectively contribute to a comprehensive understanding of the impact of climate on daylight performance across different geographic regions.
4.4. Performance Indicators
The simulation presented in this study is based on standard indicators used for daylight assessment and custom indicators determined by the author that explicitly represent the characteristics of the presented bi-sectional KSS system.
4.4.1. Standard Indicators
The analysis uses quantitative metrics designed around illuminance levels. The primary metric used is Useful Daylight Illuminance (UDI), which quantifies the percentage of sun-hours throughout the year during which horizontal illuminance (Eh) values fall within the range of 300 to 3,000 lux. This metric is commonly denoted as UDI300-3000. It was first defined by Nabil and Mardaljevic in 2005 as a metric that "determines the percentage of the time that the interior daylight illuminance in a room falls within a user-defined range" [45]. Boubekri and Lee attested to the relevance of this metric. The selection of the 300 to 3,000 lux range is based on their paper by [46] and the LEED v 4.0 standard, which requires that "illuminance levels will be between 300 lux and 3,000 lux for 9 AM and 3 PM." [47].
A qualitative study was performed using quantitative metrics analysis using daylight glare probability (DGP). DGP was defined for the first time in 2006 in a paper published by Wienold and Christoffersen in 2006 [48]. To maintain consistent results, DGP is calculated for every climate zone, for the same day and hour, and using the same FCS, considering an occupant sitting inside the room looking out. This approach allows for a direct comparison of glare potential across different climatic conditions, ensuring that any variations in DGP are attributed to differences in climate rather than variations in the analysis parameters.
According to Wienold and Christoffersen, with DGP above 35% (<2000 lux), the glare is rated as "Perceptible", while with DGP above 45% (>6000 lux/> 4500 lux), the glare is "Intolerable". The formula for calculating the Daylight Glare Probability (DGP) is well-documented in various sources [48, 5], so it is not repeated here each time DGP is calculated.
4.4.4. Custom Indicators
In evaluating the effectiveness of bi-sectional KSS within office spaces, it is essential to use multiple performance metrics. This study expands beyond the basic assessment of UDI and DGP. To assess the uniformity of daylight distribution throughout the office space, the study introduces a measure denoted as UDI uniformity – UUDI. This is calculated using the following formula (1):
is used to assess the uniformity of illuminance distribution across the office space. Other metrics are also calculated based on the Eh level simulated for the virtual sensor "A", previously defined as a source of illuminance values for switching the states of bi-sectional KSS. The list of custom metrics is defined below in Table 4:
4.5. Simulation Results
4.5.1. Quantitative Study
- UDI
For comparison, the author simulated three variants: (i) the test room without any shading device, (i) the bi-sectional KSS in the ‘open’ state (αdn and αup = 0°) and compared it with the simulation of (iii) the bi-sectional KSS in full operation mode, following the FCS described above. Simulations were conducted for three climate zones, and the results were presented in false-colour diagrams showing an Test Room layout with daylight entering from below.
With the shading fins open, the UDI values near the glass facade were low, ranging from 27% (for Tehran) to 42% (for Bangkok). Acceptable UDI values exceeding 50% were only observed deep inside the room: for the 4th row of sensors for Wrocław, the 3rd row for Bangkok, and the 6th row for Tehran. These findings align with comparative studies by the author on GHI values for each location. Tehran experiences the highest GHI values and number of clear days, resulting in significantly diverse values of UDI recorded for the front of the room and depth. Also, the uniformity of UDI is very low, at 0.44. Bangkok also records high GHI values but with fewer clear days, resulting in a uniformity of 0.55. Wrocław, with the lowest GHI values and even fewer clear days, exhibits the least diverse UDI values, leading to the highest uniformity among the analyzed schemes of 0.63. See Table 5.
Simulating the bi-sectional KSS according to the described FCS significantly improved the UDI300-3000 values for all climate zones. UDI values exceeding 50% were achieved across the entire Test Room area for all climates. For Wrocław, uniformity improved to 0.89, Bangkok to 0.96, and Tehran to 0.94. Not only does the distribution of UDI300-3000 values improve, but other employed metrics also show a distinct enhancement in quantitative visual comfort metrics when the FCS is in operation. The Emax values are lower, and the standard deviation values are reduced. All metrics are given in Table 4. Those results indicate that the bi-sectional KSS significantly improves daylight distribution in the room, with all the quantitative metrics showing improved values.
- KSS switching schedules
Based on Eh's calculated illuminance values, the bi-sectional KSS was 'launched' in full operation mode according to the FCS. An additional simulation outcome is the facade switching schedules (FSS), diagrams showing the KSS's state during every sun hour of the year. These FSS differ significantly between Wrocław, Tehran and Bangkok, highlighting the differences in each location's varying sun paths and cloud cover.
The analysis of the bi-sectional KSS's operation across Wroclaw, Tehran, and Bangkok reveals distinct operation patterns adapted to each location's specific climatic conditions, see Table 6. In Wroclaw, the bi-sectional KSS is open (state: open) 23.81% of the time, suggesting that the natural light levels in Wroclaw are often sufficient without excessive glare, requiring less frequent shading intervention. The lower part closure (state: ‘down-closed’) occurs 23.36% of the time, and the upper part (state: ‘all-closed’) is closed 7.91%, indicating a balanced approach to managing excessive illuminance near the facade. In Tehran, the bi-sectional KSS remains open for a lesser portion of the day at 15.33%. This reflects the city's high GHI levels, necessitating more frequent shading. The lower part of the shading system (‘down-closed’) is closed 32.65% of the time, while the upper part (state: ‘all-closed’) is closed 16.62% of the time. Both periods have the longest lower and upper part closure times among all analyzed cases. In Bangkok's tropical climate, bi-sectional KSS remains open for a significant 29.21% of the time, indicating ample daylight and periods of intense sunlight requiring shading. The lower part closure is 21.08%, and the upper part closure (state: ‘all-closed’) is only 4.90%, reflecting the need to manage excessive illuminance primarily in the lower part of the facade due to the high angle of the sun typical in tropical regions.
Overall, the bi-sectional KSS adapts to each location's unique climatic conditions with varying degrees of openness and closure. In Wroclaw, the bi-sectional KSS often remains open due to moderate daylight, and the instantaneous levels of elevated illuminance generally govern the opening of the lower and upper parts throughout the entire year (also activated in, e.g. January). Bangkok's bi-sectional KSS remains open frequently but demonstrates a substantial need to manage excessive sunlight, particularly in winter. In Tehran, the closure of the upper part (‘all-closed’) is practically dependent on lower solar altitudes. In Tehran, the shading system is fully closed 16.62% of the time, significantly higher than in Wroclaw (7.91%) and Bangkok (4.90%). This suggests that Tehran experiences more intense or prolonged periods of high illuminance, necessitating complete closure of the shading system more often to manage excessive sunlight and maintain indoor comfort. This higher frequency of full closure underscores the importance of robust shading solutions in regions with high solar exposure. Figure 6 shows these variations and highlights the bi-sectional KSS's flexibility and the importance of location-specific control strategies to optimize daylight comfort and energy efficiency in diverse climatic contexts.
4.5.2. Qualitative Study
A comprehensive glare study was conducted on 21 March at 10 AM for Bangkok, Wroclaw, and Tehran locations. The study calculated the Daylight Glare Probability (DGP) values for a person standing inside an office room looking out towards the facade. This specific date and time were chosen to capture the sun's position during the equinox, providing a balanced assessment of glare potential under typical springtime conditions. The analysis included various configurations of the bi-sectional KSS aligned with the Facade Closure Scheme (FCS) — ‘open’, ‘down-closed’, and ‘all-closed’ — and one additional condition not previously studied, named ‘up-closed,’ to understand their effectiveness in reducing glare. The results demonstrated significant differences in DGP values across the configurations and locations, highlighting the critical role of shading in managing visual comfort (see Table 6). The highest DGP values were observed in the open configuration, with values of 0.43, 0.49, and 0.55 for Bangkok, Wroclaw, and Tehran, respectively, indicating substantial glare potential due to direct sunlight, especially in Tehran. Including an image-based luminance map further validated the study by visually depicting light distribution and identifying high-glare zones, see Table 7.
Conversely, the ‘all closed’ and ‘up-closed’ configurations showed considerable glare reduction with DGP values below the discomfort threshold. It must be explicitly stated that the ‘up-closed’ configuration is not included in the Facade Closure Scheme (FCS). According to the FCS, the configurations of the bi-sectional KSS are ‘open’, ‘down-closed’, and ‘all-closed’. The ‘up-closed’ configuration was intentionally simulated to evaluate its potential for glare mitigation. In fact, the simulation results indicate that it has some potential for reducing glare, as evidenced by lower DGP values compared to the fully open configuration, with values of 0.33, 0.33, and 0.39 for Bangkok, Wroclaw, and Tehran, respectively. However, quantitative analysis shows that closing only the upper part of the bi-sectional KSS reduces daylight illuminance levels in the deeper parts of the room. Considering that personal override control will be available for office occupants, the ‘up-closed’ configuration could temporarily address momentarily high glare conditions. These robust findings emphasize the necessity of tailored shading solutions and demonstrate that the proposed bi-sectional KSS can effectively handle various daylight conditions in different geographic locations and solar conditions to mitigate glare and enhance occupant comfort.
Using bi-sectional KSS across three climate zones—Wroclaw, Tehran, and Bangkok—significantly improved indoor visual comfort. Simulations in unshaded, static, and fully operational FSC states revealed notable increases in UDI300-3000 values and enhancements in other visual comfort metrics. The results highlight the effectiveness of adaptive shading systems in optimizing daylight use and reducing glare, thus enhancing both occupant comfort and energy efficiency.
5. Experiment
In addition to simulation studies, experimental analysis was conducted to validate the simulation results and assess the practical feasibility of the bi-sectional KSS in real-world conditions. The experimental setup involved installing a mock-up of bi-sectional KSS in an office environment and measuring its performance under varying lighting conditions. It must be explicitly stated that the experimental study was conducted in Wrocław, Poland only. Wrocław has a temperate climate, representing a wide range of mid-latitude locations. Additionally, Wrocław was selected to ensure consistency with the author's previous research conducted in the exact location [5], thereby building a more comprehensive understanding of KSSs over time.
5.1. Experiment Design and Method
A physical modelling experiment was designed to evaluate daylight in real-world conditions vs. simulation. This method is frequently used in architecture, engineering, and environmental sciences to simulate and study physical phenomena under controlled conditions. The following steps have been undertaken:
- Materials and Equipment: A custom-made mock-up was built on a reduced scale of 1:20, precisely corresponding to the dimensions of the simulated Test Room. The reduced-scale mock-up consists of two chambers: no. ‘1’ with the prototype of bi-sectional KSS installed and no. ‘2’ serving as a control room, fully glazed without any shading system. The reduced prototype of bi-sectional KSS is made of a 3 mm laser-cut foamed PVC board connected by stiff bars in two groups of three. The prototype is mechanized by two 5V stepper motors, controlled by the Raspberry Pi 3 microcomputer and equipped with two daylight illuminance sensors BH-1750 (range 0-65,535 lux, manufac. ROHM Semiconductors Co., Ltd.) and an SSD data storage unit. One physical sensor ‘A1’ is installed inside the mock-up in chamber ‘1’ at the exact location corresponding to the location of sensor ‘A’ in the simulation. The second physical sensor, ‘A2’, is installed in control chamber no. ‘2’. The physical sensors are labelled ‘A1’ and ‘A2’ to differentiate them from the virtual sensor ‘A’. The Raspberry Pi 3 microcomputer runs a Python script identical to the Façade Closure Scheme (FCS); see Section 3.1. The frequency of illuminance measurement is 2 sec. See Figure 7.
- Additionally, two TESTO THL-160 data loggers were installed inside mock-up chamber ‘1’ to measure the illuminance in the middle of the room (hereafter referred to as physical sensor ‘B’) and in the back of the room (hereafter referred to as physical sensor ‘C'). The frequency of measurement is 15 min. Both are used in the detailed analysis of illuminance levels. The list of measuring equipment is presented in Table 8.
- Preliminary Studies, Pilot Study: The mock-up was built at the beginning of May 2024 and tested for six weeks in another location. The Python script, data storage system, and log file syntax were refined and thoroughly tested during this time under different weather conditions.
- Variables:
(i) Independent variables: The inclination angles of shading fins (αup and αdn),
(ii) Dependent variables: Daylight illuminance values,
(iii) Control variables: The static dimensional parameters of the mock-up.
- Data Collection Methods: Illuminance values Eh1 and Eh2 and the inclination angles αdn and αup of the shading fins are recorded in the log file, which is stored on the SSD drive. The data are recorded in 2-second increments.
- Data Analysis Plan. (i) data preparation: the log file can be directly imported into the spreadsheet software. Normalization of data is not necessary; transformation includes downsampling – helpful in reducing the data size and smoothing out short-term fluctuations and spline interpolation; (ii) descriptive analysis: summary tables and charts to provide an overview of the collected data; (iii) comparative analysis: comparing the experimental chamber ‘1’ (with bi-sectional KSS) and the control chamber ‘2’ (fully glazed room), analyzing the impact of independent variables (inclination angles of shading fins) on the dependent variable (daylight illuminance). The dynamic operation of the upper and lower shading fins will also be analyzed.
- Installation: The mock-up has been installed indoors behind a large glazed window in the Faculty's building. The rationale for this setup is that the existing window's glazing serves as a layer of glazing for the mock-up, effectively simulating the solar radiation accumulation that would typically occur with glazing installed directly in the mock-up. This approach ensures that the light transmission properties of the indoor environment are accurately represented within the mock-up. By utilizing the existing large glazed window, the conditions that the mock-up would experience in a real-world scenario can be replicated, thereby maintaining the integrity of the experimental results; the mock-up's response to solar radiation is realistic and reliable. Consequently, the indoor installation behind the large glazed window also protects the mock-up and all associated wiring from the influence of external weather conditions.
- Orientation, timeframe: The mock-up used in this study is oriented directly south to capture maximum solar radiation during peak sunlight hours. Consequently, the recorded data primarily reflect conditions under direct sunlight from 1 PM to 6 PM, corresponding to the period of maximum solar radiation. Therefore, the data highly represents the second half of the day when the mock-up is fully exposed to direct sunlight. This time-specific exposure should be considered when interpreting the results and their implications.
- Data Validity and Interpretation. The validity of the recorded data remains robust for the period starting from 1 PM to 6 PM. The focus on this time frame ensures that the data captures the environmental variables under direct sunlight, which is essential for studying parameters.
- Desired Illuminance Level and Hysteresis: In this experiment, the desired illuminance level was set at 3,000 lux, a "trigger value" to ensure optimal lighting conditions within the chamber ‘1’, identical to the level determined in the simulation study in Test Room described above. A hysteresis value of 300 lux was implemented to maintain this target illuminance. Hysteresis refers to a controlled range around the "trigger" value to prevent the shading system from constantly adjusting due to minor light-level fluctuations. Specifically, the system allowed the illuminance to vary between 2,700 and 3,300 lux. This hysteresis range ensures stable operation of the bi-sectional KSS by decreasing the frequency of adjustments and preventing oscillations around the "trigger" value of illuminance.
- Control and Randomization: The same daylight physical sensor (BH 1750) was used for all measurements, with the sensors' locations fixed for the entire data collection period, and the factory calibration was used. Weather conditions were regularly monitored using data from the closest meteorological station using pyranometer KIPP and ZONNEN CM 11 recording the irradiance data at the Meteorological Observatory of the Department of Climatology and Atmosphere Protection, Wrocław University (51°06'19.0''N, 17°05'00''E, elevation: 116.3 m) [49].
- Timing: The data was collected over a month, from 28 June to 15 July 2024.
- Location: The mock-up was located in Wroclaw, Poland (51.1079° N latitude, 17.0385° E longitude). Wrocław's climate, according to the Köppen classification, is primarily oceanic (Cfb) but borders on a humid continental climate (Dfb) using the 0 °C isotherm. The city experiences warm and mostly sunny summers with high rainfall, often accompanied by thunderstorms, and moderate, arid winters with frequent cloud cover. Detailed climate data are presented in Table 9.
- Experiment limitations and mitigation procedures. Reduced-scale mock-ups have been previously successful in evaluating daylight, as demonstrated by Mandalaki and Tsoutsos [52, p. 83-86]. A similar approach was presented by Bahdad et al. [53] and Zazzini et al. [54]. Protecting the mock-up from external weather conditions may not perfectly replicate outdoor environmental conditions (e.g., wind). Still, this simplification was justified because it allows for controlled and consistent experimental conditions, focusing on the primary variables of interest, such as the performance of the bi-sectional KSS under real-world solar operation. Data collection over approx. three weeks may not capture the full range of seasonal variations in daylight; however, this duration was the most feasible option for the study due to time constraints and logistical limitations.
5.2. Mock-Up Preparation
- Concept Development: The initial design and visualization of the bi-sectional KSS components were created using Rhino 7 CAD software. A laser cutter fabricated the initial mock-up from 3 mm-thick foamed PVC. Early trials demonstrated the mechanical functionality of the bi-sectional KSS, with horizontal fins rotating in two groups. Preliminary tests were conducted indoors.
- Mock-up Refinement: The mock-up design was refined based on insights from initial trials, such as the need for enhanced frame rigidity. The bi-sectional KSS with the stepper motors was then assembled using steel joints and adhesive. Although considered a "low-fidelity" prototype, it successfully demonstrated the basic functionality of the bi-sectional KSS during testing. Refer to Figure 8 for the mock-up.
5.3. Experiment results
A comprehensive set of results is presented to verify the effectiveness of the proposed bi-sectional KSS under real-world conditions.
The results of the experiment are presented across three temporal scales. First, three distinct days were deliberately selected based on the irradiance data recorded at the nearest weather station. These days represent diverse weather patterns: one clear day, one with scattered clouds, and one overcast day. The rationale for this selection was to verify the KSS's performance under various weather conditions. Irradiance data are recorded at 60-minute intervals. Next, the illuminance data recorded in the mock-up chamber ‘1’ and chamber ‘2’ by physical sensors 'A1' and 'A2' are compared during the period of highest solar radiation, from 1 PM to 6 PM. The compared illuminance data are recorded at 1-minute intervals. Finally, to track the efficiency of bi-sectional KSS, the illuminance measurements recorded by sensors 'A1', 'B', and 'C' are compared at 2-second intervals in the period between 1 PM and 4 PM. This allows the dynamic behaviour of the lower and upper fins of the bi-sectional KSS to be analysed.
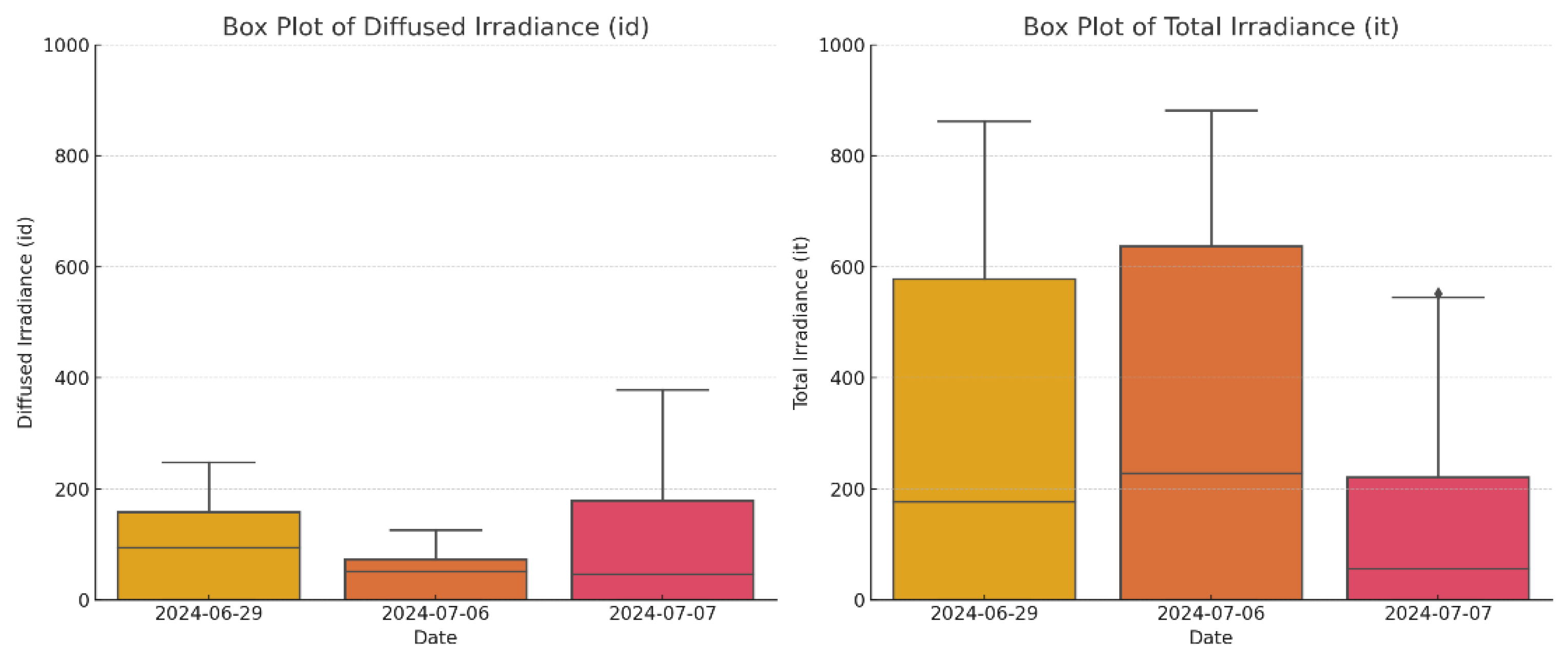
5.3.1. 60-Minute Intervals. Irradiance Analysis
Three days were selected for the analysis based on the irradiance data recorded at the nearest weather station. The selection was based on the values of total irradiance (It) and diffuse irradiance (Id):
- Day 1 – with scattered clouds (29 June 2024): A day with overall high solar exposure, but I d higher than on a clear day.
- Day 2 – a clear day (6 July 2024): A day with minimal cloud cover and high It.
- Day 3 – an overcast day (7 July 2024): A day with significant cloud cover, resulting in low It and high Id.
A brief analysis was performed regarding the levels of Id and It. For the clear day with scattered clouds, the mean It was significantly higher at 309 Wm⁻², with a maximum value reaching 881 Wm⁻². In contrast, the overcast day exhibited a mean It of only 134 Wm⁻², with a lower maximum of 552 Wm⁻². This reduction in It on overcast days is due to cloud cover obstructing direct sunlight. Conversely, the Id showed an increase on overcast days. The mean Id for the overcast day was 100 Wm⁻², compared to 68 Wm⁻² on clear days. The maximum Id also peaked at 378 W/m² on an overcast day, significantly higher than the 248.00 Wm⁻² observed on clear days. This increase is attributed to the scattering of sunlight by clouds, which enhances Id. See Figure 8. Box plots revealed distinct differences in irradiance patterns between selected analysis days, supporting the analysis of the bi-sectional KSS performance in diverse weather conditions. See Appendix B.
5.3.2. 1-Minute Intervals. Illuminance Measurements, Sensor ‘A1‘ and ‘A2‘
After the days of analysis were selected, the illuminance measurements inside the chambers were compared. Figure 9 shows the values of Eh1 recorded in chamber ‘1‘ (with bi-sectional KSS) and Eh2 in chamber ‘2‘ (fully glazed, without any protection) during the period between 1 PM and 6 PM. Eh2 strongly depends on the weather patterns during the analysis days, reaching 67K lux on a clear day. The values of Eh2 confirm the conclusions drawn from the irradiance data but allow for a more precise description: (i) Day 1 – 29 June was a day with scattered clouds dynamically obscuring the sun; (ii) Day 2 – 6 July was a clear day, during which the sun was obscured once at approximately 2:45 PM; (iii) Day 3 – 7 July was an overcast day.
In Figure 9, the values of Eh1 are represented by a black line, and a yellow line represents the values of Eh2. The dashed red line indicates the 3,000 lux threshold, and the blue dashed line shows irradiance It measured in 1-hour intervals at the weather station. An algorithm controlling the bi-sectional KSS effectively maintained the room's set illuminance values by dynamically adjusting the lower and upper fins. A comparison of Eh1 and Eh2 demonstrates the bi-sectional KSS significantly reducing illuminance, with Eh2 values being, on average, 7.94 times larger than Eh1 values. On days with scattered clouds, the instantaneous values of Eh1 occasionally exceeded 3,000 lux, with maximum values of 4,674 lux on Day 1, 3973 lux on Day 2, and 3,588 lux on Day 3. Despite these peaks, the overall performance of the KSS is highly effective, as indicated by the standard deviation (σ) values of 537 lux, 377 lux, and 214 lux, respectively.
5.3.3. 2-Seconds intervals. Illuminance Measurements, Sensors ‘A1’, ‘B’, ‘C’
At the smallest temporal scale, the analysis of Eh1 is presented alongside the inclination angle analysis: αdn and αup. This analysis covers the period from 1 PM to 4 PM when Eh2 values are at their highest. Additionally, the EhB and EhC values recorded by the Testo THL-160 data loggers in the middle (physical sensor 'B') and back (physical sensor 'C') of the room are included on the same graph (continuous grey line and dashed grey line). Those values were spline-interpolated for better visibility. A detailed overview of the illuminance values delivers very interesting insights. The dynamics of experimental bi-sectional KSS are presented in a heatmap illustrating the inclination angle with colours (yellow illustrates open fins, α= 0°; blue illustrates closed fins, α = 60°). The three analysis days deliver the following observations:
- On Day 1, scattered clouds result in very diverse Eh2 levels, which also cause diverse Eh1 levels, but with a significantly lower range of 4,674 to 1,541 lux (σ for the time frame 1 PM ÷ 3 PM is 537 lux). Lower and upper fins' heatmaps also reflect this variability. The angles change dynamically as the Eh1 sensor ‘A1’ detects the value above 3,000 lux. The lower fins operate across a full range of angles, from 0 to 60°. In contrast, the upper fins are mainly operated within the range of 0 to 20°. This allows enough daylight to penetrate the room's depth, demonstrating the innovative bi-sectional KSS design. The system is effective, as evidenced by values measured by physical sensors ‘B’ and ‘C’, since the illuminance at the back of the room never falls below 300 lux, which is the lower comfort threshold. See Figure 10.
- Day 2 is characterized by much more stable Eh2 values, except for a cloud obstructing the sun at 2:45 PM. The Eh1 values are less variable, fitting within the range of 3,973 to 1,638 lux (σ for the time frame 1 PM ÷ 2:30 PM is only 89 lux). The heatmap shows that the lower fins are practically closed at the angle of 60° all the time, except at 2:45 PM, when they are opened to allow more light. The upper fins are also relatively stable, being closed at an angle of approximately 20°, except at 2:45 PM, when they open entirely due to the lower irradiance levels, following the pattern of the lower fins. Also, on Day 2, the physical sensors ‘B’ and ‘C’ measured values never dropped below 300 lux. See Figure 11.
- On Day 3, the sky is covered with clouds, resulting in variant but much lower Eh2 readings. Despite the lower level of Eh2, the experimental bi-sectional KSS can sustain the proper level of E h1 fitting the range of 3,588 to 1171 (σ for the time frame 1 PM ÷ 2:45 PM is 219 lux) until 2:45 PM, when the external level of irradiance drops, and both groups fins are instantaneously opened to allow more light. This is clearly visible in the angle heatmaps. The lower fins dynamically adapt from 1 PM until 2:45 PM, after which they remain constantly open. The upper fins are open practically throughout the entire timeframe of 1 PM to 4 PM. See Figure 12.
6. Discussion
The presentation of simulation and measurement data opens a path for a discussion regarding the effectiveness of the presented bi-sectional KSS. It is important to note that the simulations were conducted for three different climate zones (Wrocław, Tehran, and Bangkok), while the experimental measurements were carried out in Wrocław due to practical considerations related to the university's location.
6.1. Effectiveness of KSS
The effectiveness of the bi-sectional KSS must be analyzed across various temporal scales depending on the applied methodology.
6.1.1. Simulation Study
Yearly simulations demonstrate that the bi-sectional KSS consistently maintains illuminance levels between 300 and 3,000 lux (UDI300-3000), with an average improvement:
- Over rooms without any shading: 63.98% for Wrocław, 67.22% for Tehran, and 85.51% for Bangkok (the elevated value for Bangkok is due to the very low values of UDI300-3000 for the façade without any shading). In all climate scenarios, the bi-sectional KSS outperformed the room without any shading systems by an average of 72.23% in daylight distribution, as shown in the quantitative results.
- Over rooms with static shading: 35.36% for Wrocław, 42.68% for Tehran, and 48.99% for Bangkok (average 42.34%).
The bi-sectional KSS effectively manages illuminance levels within the range of 300 to 3,000 lux (UDI300-3000), regardless of the climate. These results indicate that the bi-sectional KSS significantly enhances daylight distribution in the room, with all quantitative metrics showing improved values. The simulated performance in terms of the daylight metric should be put into context. The results of the presented study for cities with lower latitudes are approximately at the same level as the average KSS performance improvement of 46.8% (in daylight) or 43.3% (in energy) derived from the review study of sixty-six case studies of KSSs from 2022-2024, recently published by the author [12]. Additionally, the performance improvement was higher than the 26.2% estimated in 2014 by Han [55]. In 2019, Lee developed an optimal positioning algorithm for kinetic shading devices to minimize total energy demands and arrived at energy savings of 28.7% in Abu Dhabi, 28.2% in Hanoi, and 23.8% in Seoul [56].
Although the qualitative results remain heavily dependent on solar altitude, a specific configuration of the bi-sectional KSS, ‘up-closed,’ proves effective in mitigating glare at selected times of the day, lowering the Daylight Glare Probability (DGP) by 27.65%.
The study of KSS switching schedules allowed for tracking the characteristic features of the bi-sectional KSS in different climates. In a temperate climate (Wrocław), the closure of the bi-sectional KSS—especially in the 'all-closed' state—heavily depends on instantaneous 'blinks' of direct sunlight, occurring in both June and January. The analysis revealed that in Wrocław, the 'all-closed' state was triggered 20 times in June and 25 times in January due to instantaneous sunlight blinks. In hot and arid climates (Tehran), the bi-sectional KSS switching schedule is primarily governed by high solar altitude due to predominantly clear sky conditions. In hot and humid climates (Bangkok), overcast conditions persist throughout the summer months, resulting in the full closure of the bi-sectional KSS only in winter, when solar altitudes are relatively low. In all analyzed cases, the same FCS was used to achieve the reported improvements, which contradicts the conclusion of the study by Norouziasas et al., who claim, that “fixed schedules may not adapt well to dynamic conditions” [34].
6.1.2. Experimental Study
Experiments enabled studying bi-sectional KSS performance across days, minutes, and seconds.
Daily results indicate that the bi-sectional KSS maintains adequate illuminance levels in chamber ‘1’, despite high illuminance compared to the control chamber ‘2’. From 1 PM to 6 PM, the bi-sectional KSS maintained illuminance levels below 3,000 lux for 68% of the time while adapting to varying solar radiation levels, performing exceptionally well compared to test chamber ‘2’ without any protection. However, despite an upper threshold of 3,000 lux, peaks of up to 4,500 lux were measured, which are explained in detail later in the discussion.
In hourly study from 1 PM to 6 PM shows, that bi-sectional KSS can adapt quickly to changing conditions, maintaining visual comfort while preventing glare. In the temporal scale of minutes, a detailed analysis was conducted to examine the illuminance data over a three-hour period (1 PM to 4 PM) when irradiance was strongest. Additionally, measurements from sensors ‘B’ and ‘C’ located at the back of chamber ‘1’ were visualized on the same diagram, consistently showing values above 300 lux. This demonstrates that the back of the room is sufficiently lit, which was the primary purpose of dividing the fins into two independently controlled groups.
A detailed analysis of individual groups of fins was possible on a temporal scale of seconds. The algorithm dynamically adjusted the fins to maximize available daylight, ensuring consistent illuminance levels even under low irradiance conditions. The presented heatmaps allow tracking the rotation of upper and lower fins by graphically illustrating the αup and αdn. The lower fins operate within a range of 0 to 60° of rotation, responding to changes in illuminance detected by physical sensor ‘A1’. In contrast, the upper fins exhibit a more limited range of movement (typically 0-20°), maintaining consistent illuminance levels at different room depths, as detected by physical sensors ‘B’ and ‘C’. For example, the heatmap analysis for Day 2 showed that lower fins operated within a range of 0 to 60°, adjusting position 44 times between 1 PM and 4 PM. In contrast, upper fins maintained a narrower range of 0-25° rotation to stabilize deeper room illuminance, adjusting position 76 times.
Despite the maximal Eh2 values being lower on Day 1 than Day 2, Day 1 exhibits the highest variability of Eh1 measurements. This variability is likely influenced by the dynamically varying total irradiance (It) caused by the sun being obscured by shifting clouds. These rapidly changing illumination conditions are not immediately addressable by the bi-sectional KSS, which, although operating in 2-second intervals, takes 120 sec. (2 minutes) to rotate the fins by 60°. This delay is evident in the measurements taken inside the test room on Day 1 and supported by a relatively large standard deviation of σ = 537 lux for Eh1 measurements, highlighting the bi-sectional KSS's response lag to rapidly changing irradiance, suggesting an area for algorithmic improvement.
Although not the primary aim of the research, a comparison between Eh1 in chamber ‘1’ (with bi-sectional KSS) and Eh2 in chamber ‘2’ (without KSS) revealed significant differences in illuminance levels, reaching an average factor of 7.94, demonstrating the effectiveness of bi-sectional KSS in reducing daylight intensity and preventing glare. This high factor should not be considered an accurate indicator of overall performance improvement for several reasons. First, it only reflects the measurements from two physical sensors, A1 and A2, which do not provide a comprehensive view of the room's conditions. Second, different areas of the room may experience varying levels of Eh. Third, when exposed to direct irradiance, an unprotected illuminance sensor is susceptible to very high readings (It). This exposure does not accurately represent the typical daylighting conditions within chamber’s ‘2’ depth.
Practical application of bi-sectional KSS would significantly improve occupant comfort by avoiding excessively bright conditions and maintaining adequate light levels for office tasks.
7. Conclusions
The presented paper discussed the bespoke bi-sectional KSS system performance using simulation and experimental verification.
7.1. Main Points:
- The initial part of the paper presented a “State of the Art” study conducted to show critical trends in the research dedicated to KSS. This information provided the background for considering the original, bespoke bi-sectional KSS, providing insight into existing work, field gaps, and improvement opportunities.
- Both simulation and experimental studies proved that bi-sectional KSS significantly improves daylight distribution and uniformity across diverse climate zones (Wroclaw, Tehran, and Bangkok). Simulations show increased UDI300-3000 values, enhancing visual comfort by maintaining optimal illuminance levels.
- The bi-sectional KSS reduces the maximum illuminance and glare potential within office spaces. Simulations indicate that the system maintains illuminance within the comfort range for more time than unshaded or statically shaded systems, improving visual comfort metrics significantly.
- Bi-sectional KSS experimentally verified dynamically adjusts to varying solar conditions, providing better protection and comfort during different times of the day and under various weather conditions. This dynamic adaptation helps mitigate the impact of excessive sunlight and glare, particularly in high solar exposure regions like Tehran.
- By optimizing daylight levels and reducing reliance on artificial lighting and cooling, the bi-sectional KSS can potentially achieve energy savings. Although the research in the paper was focused on visual comfort metrics and did not calculate solar heat gain, it might be speculated that bi-sectional KSS minimizes the need for air conditioning. This promotes sustainable building practices and reduces the carbon footprint of buildings.
- The study advocates for the broader application and further development of bi-sectional KSS in various architectural contexts. The system's ability to enhance visual comfort and energy efficiency under different climatic conditions underscores its potential as a viable solution for sustainable building design.
Additionally, the manuscript provides a rare illustration of the operational dynamics of the KSS, showing switching schedules for simulations and detailed heatmaps for experiments. These visualizations offer valuable insights into the practical implementation and effectiveness of the KSS.
7.2. Limitations of Study
This study has some explicit limitations that should be acknowledged. First, the simulation was limited to three locations; other locations with different climates and weather patterns might yield different results. Second, the inherent properties of the Radiance engine limit the temporal resolution of the simulation study to one hour, which might not capture all weather phenomena accurately. Third, the *.epw files used for the simulation may need to be updated to reflect current climate changes, such as more sunny periods. Fourth, the experiment was conducted over a limited timeframe, from June 28 to July 15, 2024, due to factors beyond the author's control, providing reliable measurement results primarily after 1 PM, reflecting peak irradiance levels. Fifth, the lower fins in the bi-sectional KSS may have compromised the horizontal view angle (14° to 28°) required by the European Standard EN17037 for occupants in a sitting position. Sixth, the horizontal design of the KSS might be threatened by natural forces such as wind and snow in temperate climates, potentially affecting its integrity.
7.3. Future Research
The proposed bi-sectional KSS could be further investigated within a different experimental timeframe, reflecting daylight conditions on days with shorter durations of sunlight and overcast conditions. The experiment's parameters might be further refined by changing the recommended illuminance range, for example, 300-2,000 lux, or adjusting the hysteresis to 600 lux. Combined solutions with horizontal fins at different heights are another option to explore. This paper does not compare the cost-effectiveness of the bi-sectional KSS variants, which is a significant omission given the potential financial implications. Future research could examine the bi-sectional KSS’s cost and finance aspects to provide a more comprehensive analysis. Enhancing the adaptability and responsiveness of the bi-sectional KSS should also be studied by tuning the parameters of the experimental setup. A possible improvement is adopting a different geometry for the shading system that is resistant to snow accumulation.
7.5. Key Takeaway
- The bi-sectional KSS is highly effective in enhancing visual comfort across diverse climatic conditions, making it a climate-responsive solution for sustainable and adaptive building designs.
Author Contributions
The author confirms being the sole contributor of this work and has approved it for publication.
Acknowledgements
The author wishes to thank Magdalena Baborska-Narożny, Wroclaw University of Science and Technology, for borrowing the Testo THL-160 data loggers used for the measurements in the paper and Maciej Kryza for making the weather data available from the weather station Meteorological Observatory of the Department of Climatology and Atmosphere Protection, Wrocław University (51°06′19.0′′ N, 17°05′20.0′′ E, elevation: 116.3 m). I also want to thank Tomasz Malek, whose technical expertise and dedicated assistance were invaluable in developing the Python code essential for running the prototype presented in this paper. I am deeply grateful for his support and generosity in sharing his profound knowledge and time.
Conflicts of Interest
The author declares no conflicts of interest.
Nomenclature
| Metric | Unit | Description |
| ASE | [h] | Annual Solar Exposure |
| CBDM | n.a. | Climate Based Daylight Modelling |
| DGP | [%] | daylight glare probability |
| DSIM | n.a. | discrete state illumination method |
| Eh | [lux] | Horizontal illuminance |
| Eh1 | [lux] | Horizontal illuminance at sensor A1 |
| Eh2 | [lux] | Horizontal illuminance at sensor A2 |
| EhB | [lux] | Horizontal illuminance at sensor B |
| EhC | [lux] | Horizontal illuminance at sensor C |
| Emax | [lux] | Maximum illuminance at the sensor 'A1'. |
| FSC | n.a. | Façade Closure Scheme |
| GHI | Wm-2 | Global Horizontal Irradiance |
| Id | Wm-2 | Diffuse Irradiance |
| It | Wm-2 | Total Irradiance |
| KSS | n.a. | Kinetic Shading System |
| MdnEh | n.a. | Median illuminance in the year at the sensor 'A'. |
| t<300 | [h] | Hours per year with illuminance below 300 lux at sensor 'A'. |
| t>3000 | [h] | Hours per year with illuminance over 3,000 lux at sensor 'A'. |
| UDI | [%] | Useful Daylight Illuminance |
| UDImax | [%] | The maximal UDI for the final UDI300-3000 distribution |
| UUDI | n.a. | UDI uniformity for final UDI300-3000 distribution |
| σUDI | n.a. | Standard deviation σ for final UDI300-3000 distribution |
| [%] | Average UDI for final UDI300-3000 distribution |
Appendix A
Due to the relatively short measurement period, the validation (calibration) of the model was verified based on data collected on Day 2, 06.07.2024, within the timeframe 1 PM-6 PM. Due to different temporal scales, the collected 2-sec measurements denoted as Eh1 were down-sampled to show the mean value for each hour from 1 PM to 6 PM and further processed as the ‘observed values’. The ‘predicted values’, denoted as Eh, were simulated for virtual sensor ‘A’ according to the procedure described in Section 4.1, using real weather data (It and Id) measured on 06.07.2024 at the local weather station by updating the *.epw file [49], see Table A1. Although the analysis of bi-sectional KSS shows that the observed values are temporally very limited, the author calculated the CV(RMSE) to be 15.74% according to the following formulas:
where obsi indicates observed values, and prei predicted for the following data set:

Table A1.
Observed and predicted values of illuminance at 06.07.2024.
| 1 PM | 2 PM | 3 PM | 4 PM | 5 PM | 6 PM | |
| observed Eh1 [lux] | 3189 | 2870 | 2853 | 2729 | 1736 | 1260 |
| predicted Eh [lux] | 3217 | 2674 | 2430 | 1999 | 2065 | 1418 |
ASHRAE Guideline 14–2014 states that "typically, models are declared to be calibrated if they produce CV(RMSE)s within ±30% when using hourly data" [57]. Although these requirements apply to computational models for energy, the author applied them to daylight without other available requirements. However, achieving a CV(RMSE) of 15.74% within this limited timeframe suggests that the model performs reasonably accurately. This result provides a preliminary yet valuable validation of the model's effectiveness, justifying further testing and refinement over longer periods and varied conditions.
Appendix B
Box plots reveal distinct differences in irradiance patterns between selected analysis days, supporting the analysis of the bi-sectional KSS performance in diverse weather conditions on Day 1, Day 2 and Day 3. See Figure 13.
Figure 13.
Box plots of Id and It values illustrate diverse weather patterns on analysis days.
References
- Thewes, A.; Maas, S.; Scholzen, F.; Waldmann, D.; Zürbes, A. Field study on the energy consumption of school buildings in Luxembourg. Energy Build. 2014, 68, 460–470. [Google Scholar] [CrossRef]
- Sustainable Development Goals, United Nations Department of Global Communications. May 2020. Available online: https://www.un.org/sustainabledevelopment/wp-content/uploads/2019/01/SDG_Guidelines_AUG_2019_Final.pdf (accessed on 1 June 2024).
- IPCC (Intergovernmental Panel on Climate Change). Climate Change 2021: The Physical Science Basis. In Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change, edited by V. Masson-Delmotte et al., Cambridge University Press, 2021. https://www.ipcc.ch/report/ar6/wg1/downloads/report/IPCC_AR6_WGI_Full_Report.pdf. (accessed on 1 June 2024).
- Negroponte, N. Soft Architecture Machines; MIT Press: Cambridge, MA, USA, 1976. [Google Scholar]
- Brzezicki, M. Daylight Comfort Performance of a Vertical Fin Shading System: Annual Simulation and Experimental Testing of a Prototype. Buildings 2024, 14, 571. [Google Scholar] [CrossRef]
- Alzoubi, H.H.; Al-Zoubi, A.H. Assessment of building facade performance in terms of daylighting and the associated energy consumption in architectural spaces: Vertical and horizontal shading devices for southern exposure facades. Energy Convers. Manag. 2010, 51, 1592–1599. [Google Scholar] [CrossRef]
- Cecchi, M.; Naticchia, B.; Carbonari, A. Development of a first prototype of a liquid-shaded dynamic glazed facade for buildings. Creat. Constr. Conf. 2014, 85, 94–103. [Google Scholar] [CrossRef]
- Komerska, A.; Bianco, L.; Serra, V.; Fantucci, S.; Rosinski, M. Experimental analysis of an external dynamic solar shading integrating PCMs: First results. Energy Procedia 2015, 78, 3452–3457. [Google Scholar] [CrossRef]
- Aelenei, L.; Aelenei, D.; Romano, R.; Mazzucchelli, ES.; Brzezicki, M.; Rico-Martinez, J.M. Case Studies—Adaptive Façade Network; TU Delft Open: Delft, The Netherlands, 2018. [Google Scholar]
- Al Dakheel, J.; Tabet Aoul, K. Building Applications, Opportunities and Challenges of Active Shading Systems: A State-of-the-Art Review. Energies 2017, 10, 1672. [Google Scholar] [CrossRef]
- Premier, A. Solar shading devices integrating smart materials: An overview of projects, prototypes and products for advanced facade design. Archit. Sci. Rev. 2019, 62, 455–465. [Google Scholar] [CrossRef]
- Brzezicki, M. A Systematic Review of the Most Recent Concepts in Kinetic Shading Systems with a Focus on Biomimetics: A Motion/Deformation Analysis. Sustainability 2024, 16, 5697. [Google Scholar] [CrossRef]
- Adriaenssens, S.; Rhode-Barbarigos, L.; Kilian, A.; Baverel, O.; Charpentier, V.; Horner, M.; Buzatu, D. Dialectic Form Finding of Passive and Adaptive Shading Enclosures. Energies 2014, 7, 5201–5220. [Google Scholar] [CrossRef]
- Chan, Y.C.; Tzempelikos, A. Daylighting and energy analysis of multi-sectional facades. Energy Procedia 2015, 78, 189–194. [Google Scholar] [CrossRef]
- Wanas, A.; Aly, S.S.; Fargal, A.A.; El-Dabaa, R.B. Use of kinetic facades to enhance daylight performance in office buildings with emphasis on Egypt climates. J. Eng. Appl. Sci. 2015, 62, 339–361. [Google Scholar]
- Lee, D.-S.; Koo, S.-H.; Seong, Y.-B.; Jo, J.-H. Evaluating Thermal and Lighting Energy Performance of Shading Devices on Kinetic Façades. Sustainability 2016, 8, 883. [Google Scholar] [CrossRef]
- Cimmino, M.C.; Miranda, R.; Sicignano, E.; Ferreira, A.J.M.; Skelton, R.E.; Fraternali, F. Composite solar facades and wind generators with tensegrity architecture. Compos. Part B-Eng. 2017, 115, 275–281. [Google Scholar] [CrossRef]
- Sheikh, W.T.; Asghar, Q. Adaptive biomimetic facades: Enhancing energy efficiency of highly glazed buildings. Front. Archit. Res. 2019, 8, 319–331. [Google Scholar] [CrossRef]
- Grobman, Y.J.; Capeluto, I.G.; Austern, G. External shading in buildings: Comparative analysis of daylighting performance in static and kinetic operation scenarios. Archit. Sci. Rev. 2017, 60, 126–136. [Google Scholar] [CrossRef]
- Damian, A.; Filip, R.G.; Catalina, T.; Frunzulica, R.; Notton, G. The influence of solar-shading systems on an office building cooling load. In Proceedings of the 7th International Conference on Energy Efficiency and Agricultural Engineering 2020, Ruse, Bulgaria, 12–14 November 2020. [Google Scholar]
- Luan, LT.; Thang, L.D.; Hung, N.M.; Nguyen, Q.H.; Nguyen-Xuan, H. Optimal design of an Origami-inspired kinetic facade by balancing composite motion optimization for improving daylight performance and energy efficiency. Energy 2021, 219, 119557. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Fadli, F.; Mohammadi, M. Biomimetic kinetic shading facade inspired by tree morphology for improving occupant's daylight performance. J. Daylighting 2021, 8, 65–82. [Google Scholar] [CrossRef]
- Sankaewthong, S.; Horanont, T.; Miyata, K.; Karnjana, J.; Busayarat, C.; Xie, H. Using a Biomimicry Approach in the Design of a Kinetic Façade to Regulate the Amount of Daylight Entering a Working Space. Buildings 2022, 12, 2089. [Google Scholar] [CrossRef]
- Globa, A.; Costin, G.; Tokede, O.; Wang, R.; Khoo, C.-K.; Moloney, J. Hybrid kinetic facade: Fabrication and feasibility evaluation of full-scale prototypes. Archit. Eng. Des. Manag. 2022, 18, 791–811. [Google Scholar] [CrossRef]
- Anzaniyan, E.; Alaghmandan, M.; Koohsari, A.M. Design, fabrication and computational simulation of a bio-kinetic facade inspired by the mechanism of the Lupinus Succulentus plant for daylight and energy efficiency. Sci. Technol. Built Environ. 2022, 28, 1456–1471. [Google Scholar] [CrossRef]
- Sharma, R.; Kaushik, A.S. Development and optimization of kinetic façade system for the improvement of visual comfort in an office building at Gurugram, India. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2023; Volume 1210, p. 12012. [Google Scholar] [CrossRef]
- Mangkuto, R.A.; Koerniawan, M.D.; Apriliyanthi, S.R.; Lubis, I.H.; Atthaillah; Hensen, J. L.M.; Paramita, B. Design Optimisation of Fixed and Adaptive Shading Devices on Four Façade Orientations of a High-Rise Office Building in the Tropics. Buildings 2022, 12, 25. [Google Scholar] [CrossRef]
- Catto Lucchino, E.; Goia, F. Multi-domain model-based control of an adaptive façade based on a flexible double skin system. Energy Build. 2023, 285, 112881. [Google Scholar] [CrossRef]
- Hassooni, A.H.; Kamoona, G.M.I. Effects of Kinetic Façades on Energy Performance: A Simulation in Patient's Rooms of a Hospital in Iraq. J. Int. Soc. Study Vernac. Settl. 2023, 10, 178–193. Available online: https://isvshome.com/pdf/ISVS_10-7/ISVSej_10.7.12_Ali.pdf (accessed on 20 April 2024).
- Shen, L.; Han, Y. Optimizing the modular adaptive façade control strategy in open office space using integer programming and surrogate modelling. Energy Build. 2022, 254, 111546. [Google Scholar] [CrossRef]
- Ożadowicz, A.; Walczyk, G. Energy Performance and Control Strategy for Dynamic Façade with Perovskite PV Panels—Technical Analysis and Case Study. Energies 2023, 16, 3793. [Google Scholar] [CrossRef]
- de Bem, G.; Krüger, E.; La Roche, P.; de Abreu, AAAM. ; Luu, L. Development of ReShadS, a climate-responsive shading system: Conception, design, fabrication, and small-scale testing. J. Build. Eng. 2024, 89, 109423. [Google Scholar] [CrossRef]
- Kim, J.H.; Han, S.H. Indoor Daylight Performances of Optimized Transmittances with Electrochromic-Applied Kinetic Louvers. Buildings 2022, 12, 263. [Google Scholar] [CrossRef]
- Norouziasas, A.; Tabadkani, A.; Rahif, R.; Amer, M.; van Dijk, D.; Lamy, H.; Attia, S. Implementation of ISO/DIS 52016-3 for adaptive façades: A case study of an office building. Build. Environ. 2023, 235, 110195. [Google Scholar] [CrossRef]
- Naeem, N.; Abdin, A.; Saleh, A. An Approach to Using Shape Memory Alloys in Kinetic Façades to Improve the Thermal Performance of Office Building Spaces. Civ. Eng. Archit. 2024, 12, 326–349. [Google Scholar] [CrossRef]
- Vazquez, E.; Duarte, J.P. Bistable kinetic shades actuated with shape memory alloys: Prototype development and daylight performance evaluation. Smart Mater. Struct. 2022, 31, 34001. [Google Scholar] [CrossRef]
- Reinhart, C.F.; Walkenhorst, O. Validation of dynamic radiance-based daylight simulations for a test office with external blinds. Energy Build. 2001, 33, 683–697. [Google Scholar] [CrossRef]
- Ng, KM.; Adam, N.M.; Ab Kadir, M.Z.A. Experimental investigation of shading facade-integrated solar absorber system under hot tropical climate. J. Build. Eng. 2019, 23, 136–143. [Google Scholar] [CrossRef]
- Yoon, Y.; Moon, J.W.; Kim, S. Development of annual daylight simulation algorithms for prediction of indoor daylight illuminance. Energy Build. 2016, 118, 1–17. [Google Scholar] [CrossRef]
- Kharvari, F. An empirical validation of daylighting tools: Assessing radiance parameters and simulation settings in Ladybug and Honeybee against field measurements. Solar Energy 2020, 207, 1021–1036. [Google Scholar] [CrossRef]
- Reinhart, C.F.; Andersen, M. Development and validation of a radiance model for a translucent panel. Energy Build. 2006, 38, 890–904. [Google Scholar] [CrossRef]
- Reinhart, C.F. Daylighting Handbook II.; Building Technology Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Do, CT.; Chan, Y.C. Evaluation of the effectiveness of a multi-sectional facade with Venetian blinds and roller shades with automated shading control strategies. Sol. Energy 2020, 212, 241–257. [Google Scholar] [CrossRef]
- Ladybug Tools. (2024). EPW Map. Retrieved from https://www.ladybug.tools/epwmap/ (accessed 1 June 2024).
- Nabil, A.; Mardaljevic, J. Useful daylight illuminance: A new paradigm for assessing daylight in buildings. Light. Res. Technol. 2005, 37, 41–59. [Google Scholar] [CrossRef]
- Boubekri, M.; Lee, J. A comparison of four daylighting metrics in assessing the daylighting performance of three shading systems. J. Green Build. 2017, 12, 39–53. [Google Scholar] [CrossRef]
- Daylight. U.S. Green Building Council. https://www.usgbc.org/credits/healthcare/v4-draft/eqc-0. (accessed on 1 June 2024).
- Wienold, J.; Christoffersen, J. Evaluation methods and development of a new glare prediction model for daylight environments with the use of CCD cameras. Energy Build. 2006, 38, 743–757. [Google Scholar] [CrossRef]
- Markowicz, K.M.; Stachlewska, I.S.; Zawadzka-Manko, O.; Wang, D.; Kumala, W.; Chilinski, M.T.; Makuch, P.; Markuszewski, P.; Rozwadowska, A.K.; Petelski, T.; et al. A Decade of Poland-AOD Aerosol Research Network Observations. Atmosphere 2021, 12, 1583. [Google Scholar] [CrossRef]
- Ambient Light Sensor IC Series. Digital 16bit Serial Output Type Ambient Light Sensor IC. Rohm Semiconductors. Technical Note. BH-1750 FVI. Retrived from: https://fscdn.rohm.com/en/products/databook/datasheet/ic/sensor/light/bh1721fvc_spec-e.pdf. (accessed on 1 June 2024).
- Normy Klimatyczne 1991–2020—Portal Klimat IMGW-PiB. Available online: https://klimat.imgw.pl/pl/climate-normals/PPP_S (accessed on 1 June 2024).
- Mandalaki, M., & Tsoutsos, T. (2019). Solar Shading Systems: Design, Performance, and Integrated Photovoltaics. Springer International Publishing AG.
- Bahdad, A.A.S.; Fadzil, S.F.S.; Taib, N. Optimization of Daylight Performance Based on Controllable Light-shelf Parameters using Genetic Algorithms in the Tropical Climate of Malaysia. Journal of Daylighting 2020, 7, 7–136. [Google Scholar] [CrossRef]
- Zazzini, P.; Romano, A.; Di Lorenzo, A.; Portaluri, V.; Di Crescenzo, V. Experimental Analysis of the Performance of Light Shelves in Different Geometrical Configurations Through the Scale Model Approach. Journal of Daylighting 2020, 7, 7–56. [Google Scholar] [CrossRef]
- Han, S. Implementation and the energy efficiency of the kinetic shading system. Journal of the Korean Institute of Ecological Architecture and Environment 2014, 14, 67–73. [Google Scholar] [CrossRef]
- Lee, B. Heating, Cooling, and Lighting Energy Demand Simulation Analysis of Kinetic Shading Devices with Automatic Dimming Control for Asian Countries. Sustainability 2019, 11, 1253. [Google Scholar] [CrossRef]
- ASHRAE, ASHRAE Guideline. Guideline 14-2014: Measurement of energy, demand, and water savings. American society of heating, refrigerating, and air conditioning engineers, Atlanta, Georgia 2014.
Figure 1.
South facade of the Museum of Arab World in Paris (arch. Jean Nouvel, 1987). (a) South facade view; (b) the detail of a mechanical diaphragm system (photo by the author).
Figure 1.
South facade of the Museum of Arab World in Paris (arch. Jean Nouvel, 1987). (a) South facade view; (b) the detail of a mechanical diaphragm system (photo by the author).
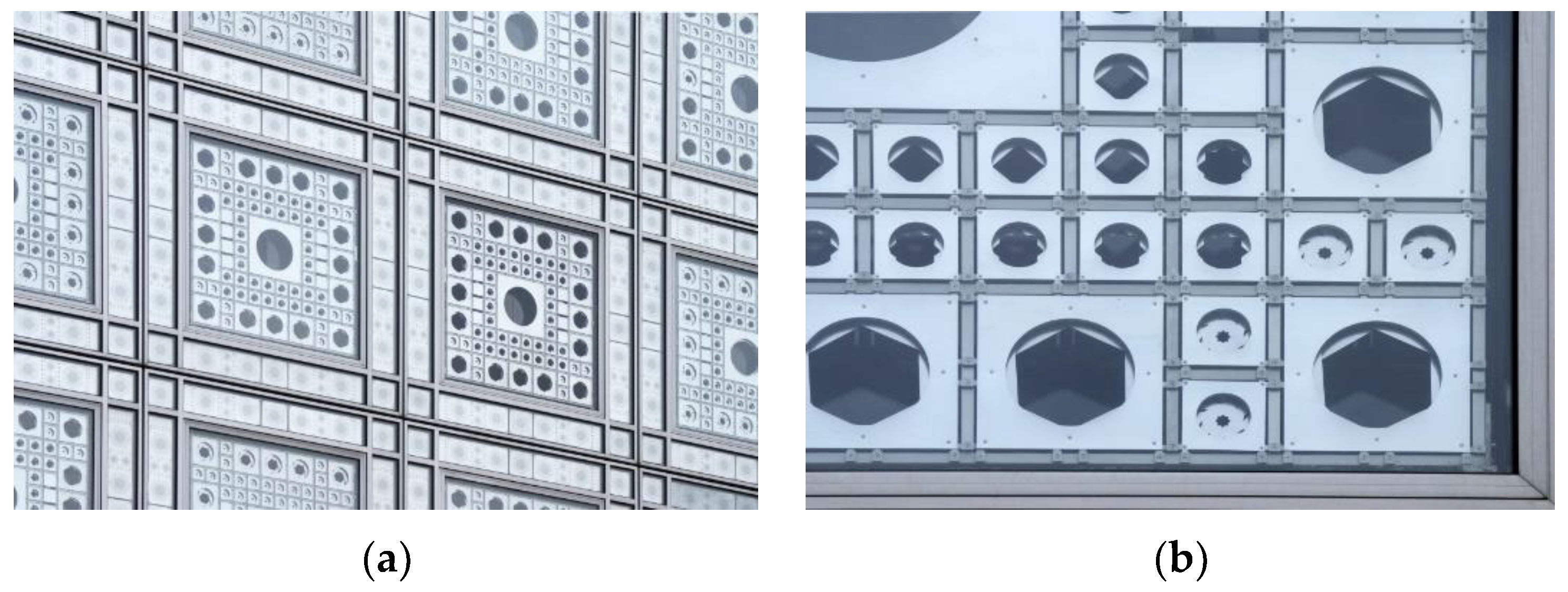
Figure 2.
Bi-sectional KSS proposal: (a) conceptual sketches, dimensions of the proposed KSS” (b) horizontal section; (c) vertical section; (d) axonometric view. The angles αup (marked in blue) and αdn (marked in red) are the horizontal fin rotation angles for the upper and lower fins, respectively.
Figure 2.
Bi-sectional KSS proposal: (a) conceptual sketches, dimensions of the proposed KSS” (b) horizontal section; (c) vertical section; (d) axonometric view. The angles αup (marked in blue) and αdn (marked in red) are the horizontal fin rotation angles for the upper and lower fins, respectively.
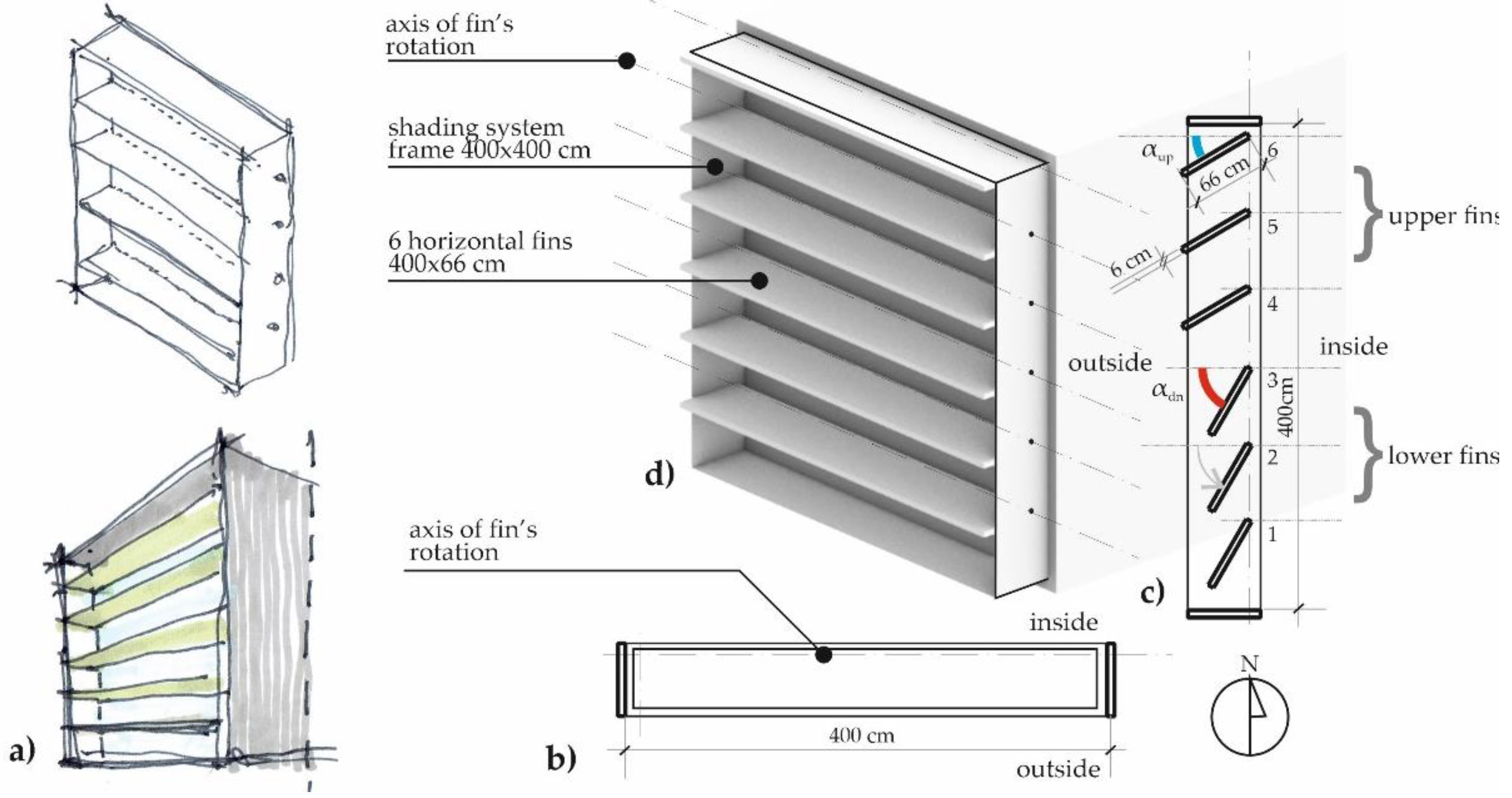
Figure 3.
Façade Closure Scheme (FCS) Flowchart for simulation. The FCS manages the KSS based on illuminance levels detected by sensor ‘A’. Fins remain open when illuminance is below 3,000 lux (KSS ‘open’). Lower fins close if it exceeds 3,000 lux (KSS ‘down-closed’). If it rises again, the upper fins close (KSS ‘all-closed’). In the simulation, the FCS is simplified, with fins restricted to extreme positions of either 0° or 60°, whereas in the experiment, intermediate positions are allowed.
Figure 3.
Façade Closure Scheme (FCS) Flowchart for simulation. The FCS manages the KSS based on illuminance levels detected by sensor ‘A’. Fins remain open when illuminance is below 3,000 lux (KSS ‘open’). Lower fins close if it exceeds 3,000 lux (KSS ‘down-closed’). If it rises again, the upper fins close (KSS ‘all-closed’). In the simulation, the FCS is simplified, with fins restricted to extreme positions of either 0° or 60°, whereas in the experiment, intermediate positions are allowed.
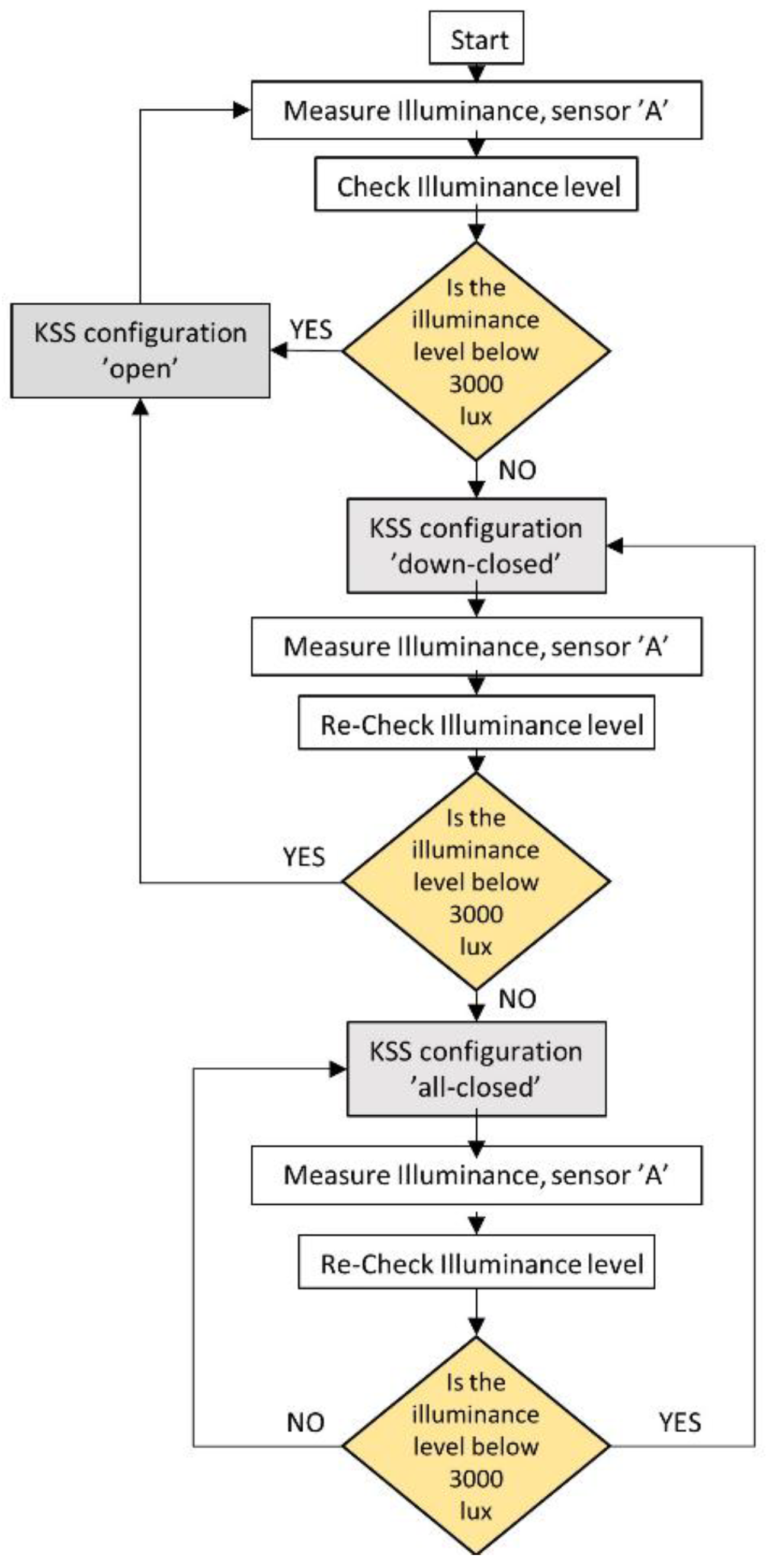
Figure 4.
Schematic diagram of the methodology for simulation and experimental illuminance measurements of the KSS facade in Wroclaw, Poland. 'UDI' denotes Useful Daylight Illuminance, 'DGP' denotes Daylight Glare Probability, and 'Eh' denotes horizontal illuminance.
Figure 4.
Schematic diagram of the methodology for simulation and experimental illuminance measurements of the KSS facade in Wroclaw, Poland. 'UDI' denotes Useful Daylight Illuminance, 'DGP' denotes Daylight Glare Probability, and 'Eh' denotes horizontal illuminance.
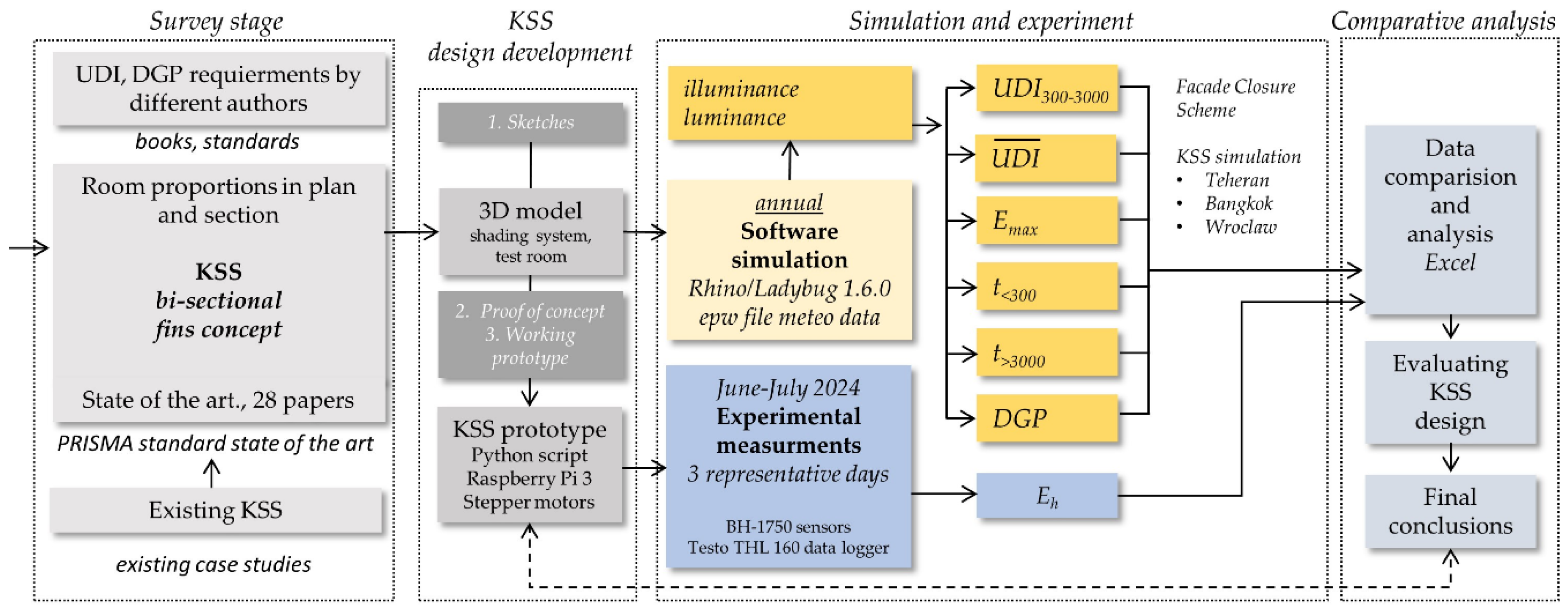
Figure 5.
Simulation setup of the Test Room: (a) plan showing the location of the shading fins and virtual sensors, and the location of sensor ‘A’; (b) section showing the location of the shading fins; (c) an axonometric view showing the Test Room with the shading system mounted.
Figure 5.
Simulation setup of the Test Room: (a) plan showing the location of the shading fins and virtual sensors, and the location of sensor ‘A’; (b) section showing the location of the shading fins; (c) an axonometric view showing the Test Room with the shading system mounted.
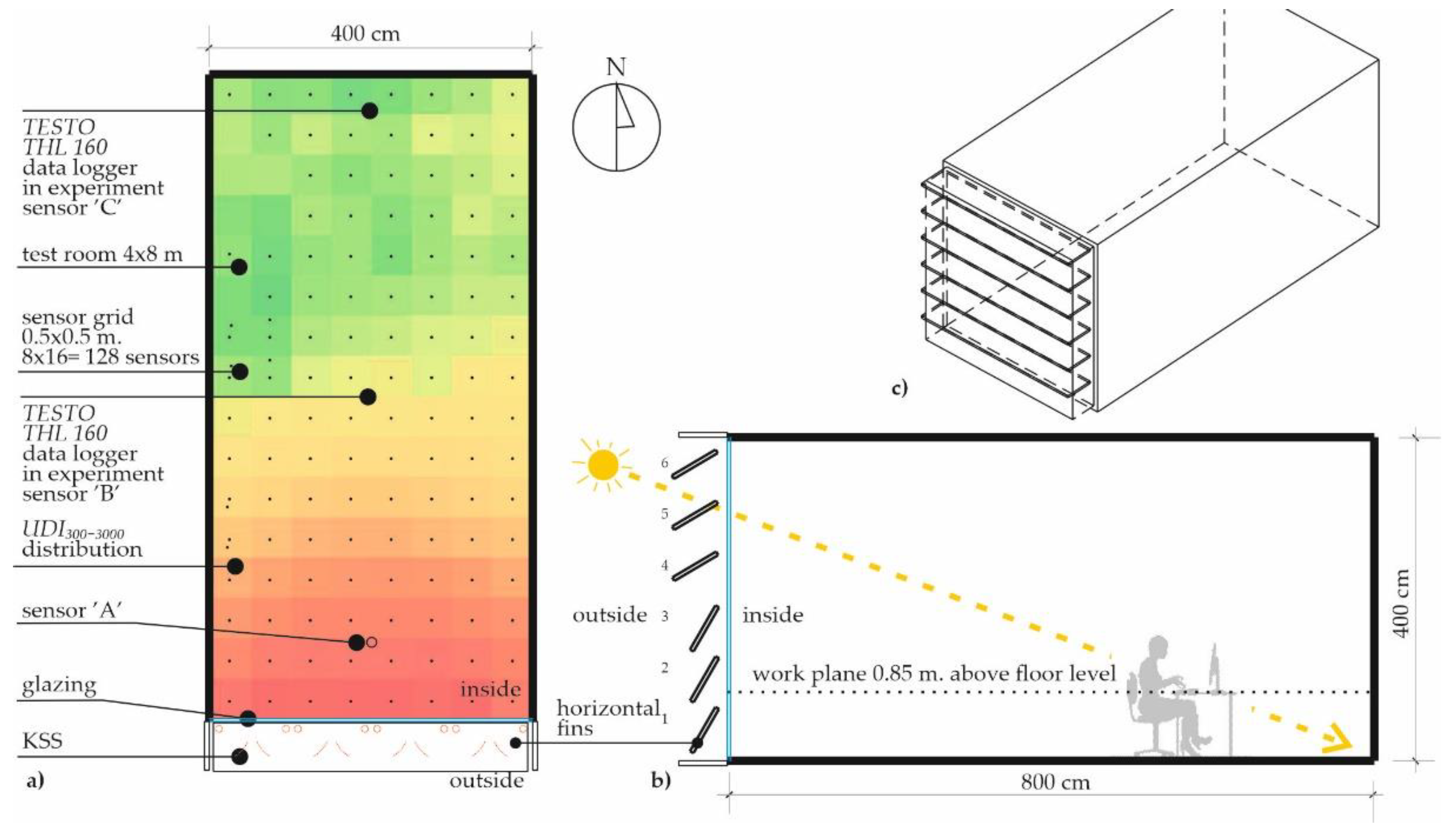
Figure 6.
KSS Switching Schedule in Wroclaw, Tehran, and Bangkok throughout the year. This figure illustrates the time the KSS remains in each operational state—‘open’, ‘down-closed’ and ‘all-closed’ —across three distinct climates. Data reveal the system's adaptive responses to the specific solar and daylight conditions.
Figure 6.
KSS Switching Schedule in Wroclaw, Tehran, and Bangkok throughout the year. This figure illustrates the time the KSS remains in each operational state—‘open’, ‘down-closed’ and ‘all-closed’ —across three distinct climates. Data reveal the system's adaptive responses to the specific solar and daylight conditions.
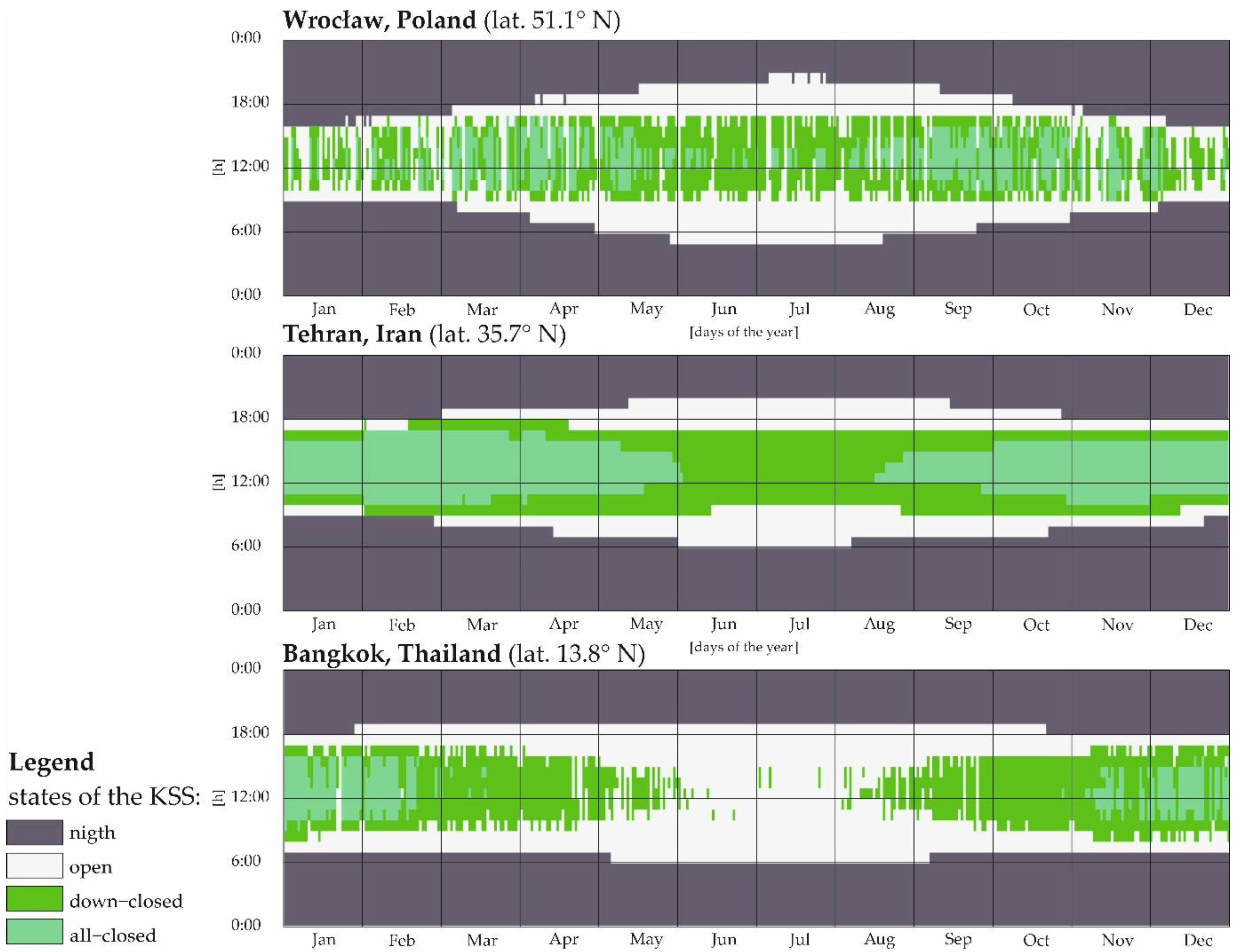
Figure 7.
Mock-up setup to collect measurements: a) Mock-up view with chamber ‘1’ and chamber ‘2’; b) Mock-up view with KSS's state "down-closed"; c) Top view of mock-up with removed top cover (ceiling) showing sensors A1, B, and C.
Figure 7.
Mock-up setup to collect measurements: a) Mock-up view with chamber ‘1’ and chamber ‘2’; b) Mock-up view with KSS's state "down-closed"; c) Top view of mock-up with removed top cover (ceiling) showing sensors A1, B, and C.
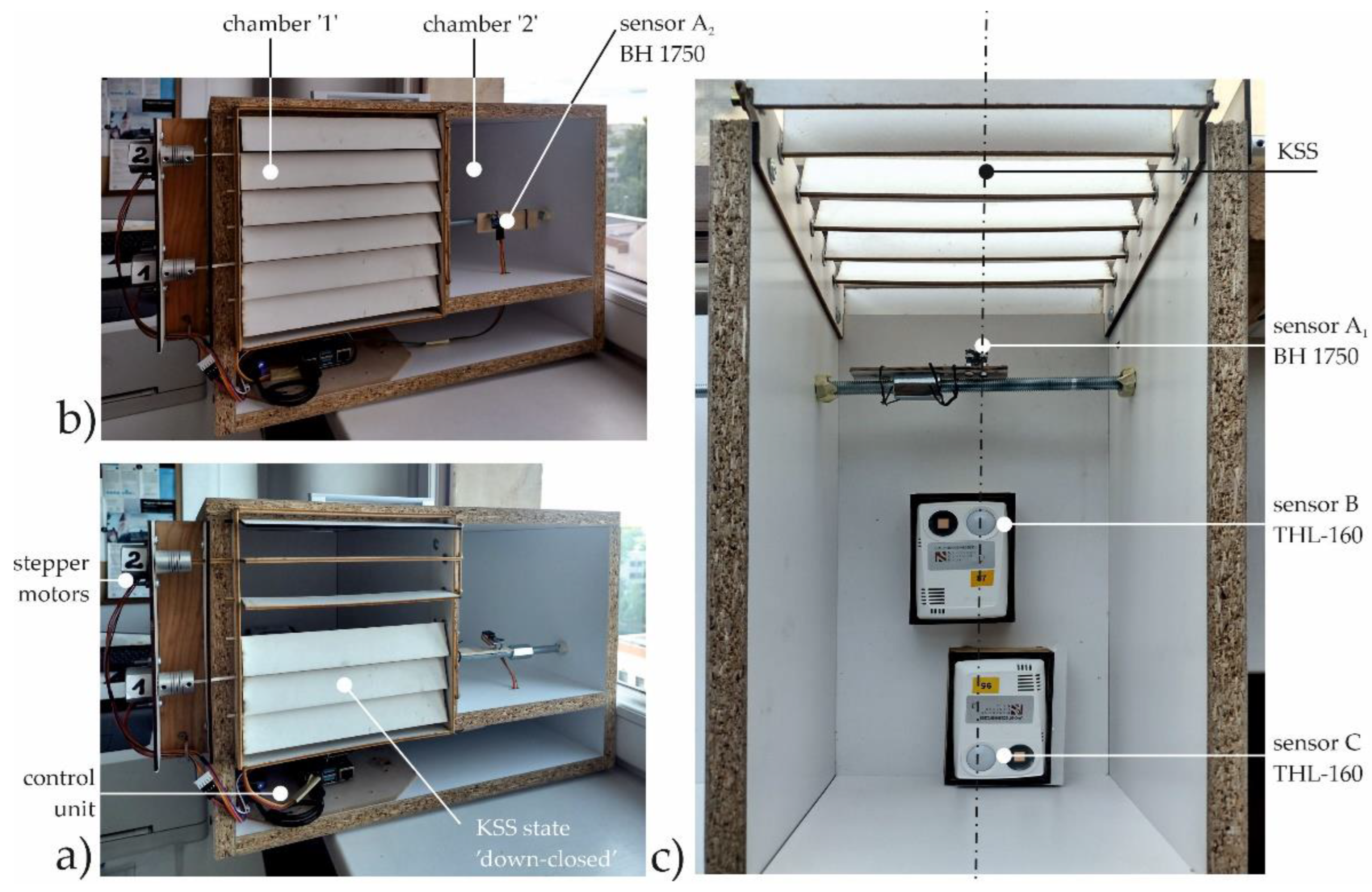
Figure 8.
Irradiance measurements for the analysis days: Day 1, Day 2, and Day 3. The dotted blue line indicates total irradiance (It), and the grey line indicates diffuse irradiance (Id). The measurements were recorded at the closest Meteorological Observatory of the Department of Climatology and Atmosphere Protection, Wrocław University (51°06'19.0''N, 17°05'00''E, elevation: 116.3 m) [49].
Figure 8.
Irradiance measurements for the analysis days: Day 1, Day 2, and Day 3. The dotted blue line indicates total irradiance (It), and the grey line indicates diffuse irradiance (Id). The measurements were recorded at the closest Meteorological Observatory of the Department of Climatology and Atmosphere Protection, Wrocław University (51°06'19.0''N, 17°05'00''E, elevation: 116.3 m) [49].
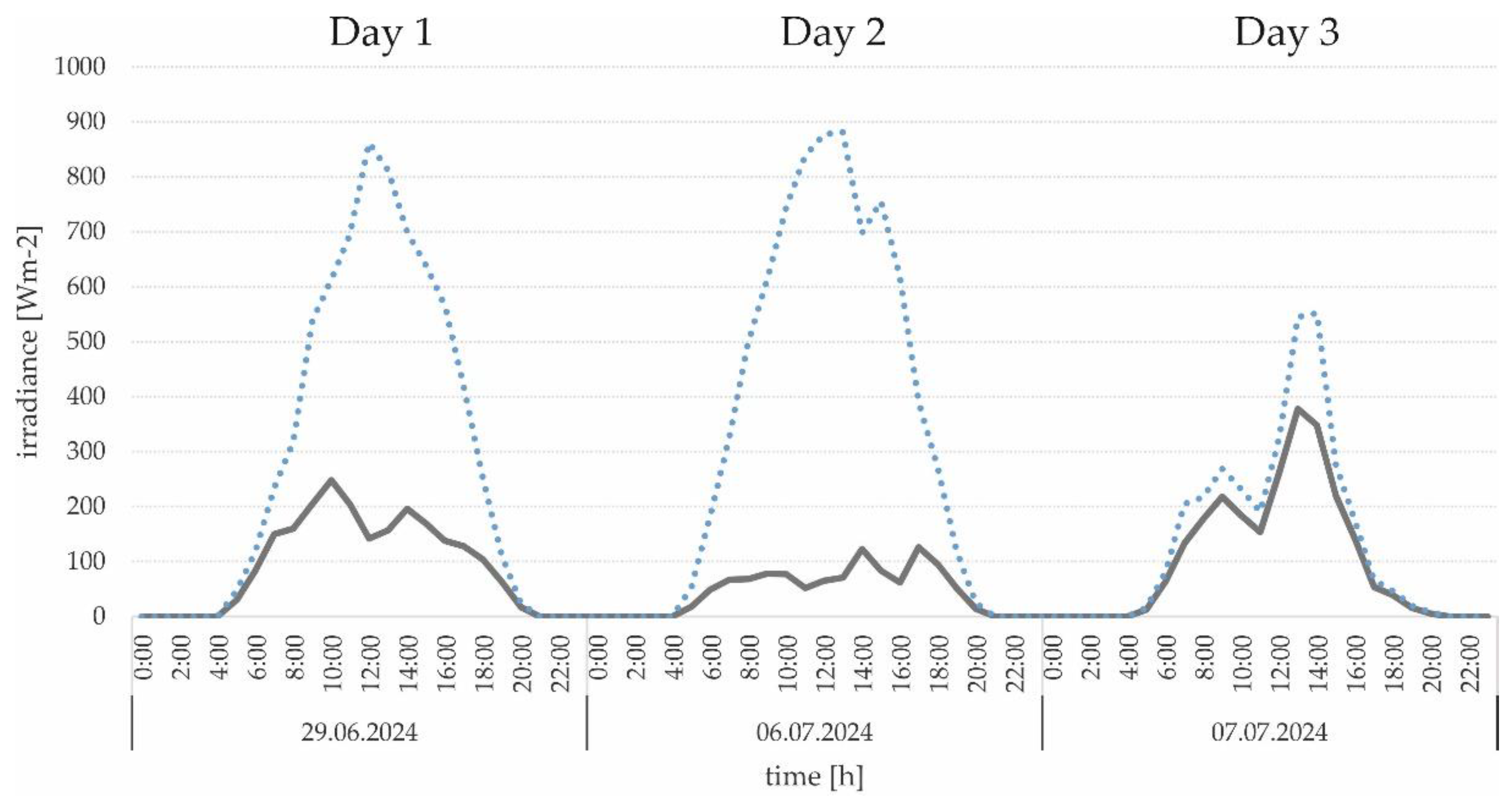
Figure 9.
Eh1 and Eh2 measurements from 1 PM-6 PM for all analysis days. The continuous yellow line represents the illuminance Eh2 measured in chamber ‘2’ (without any protection), while the black continuous line represents the illuminance Eh1 measured in chamber ‘1’ (behind the KSS). The dotted blue line represents the total irradiance (It) measured at the weather station, and the dashed red line represents the level of the 'trigger' value threshold at 3,000 lux. The green dashed outline indicates the area that will be enlarged and shown in detail in the next Section.
Figure 9.
Eh1 and Eh2 measurements from 1 PM-6 PM for all analysis days. The continuous yellow line represents the illuminance Eh2 measured in chamber ‘2’ (without any protection), while the black continuous line represents the illuminance Eh1 measured in chamber ‘1’ (behind the KSS). The dotted blue line represents the total irradiance (It) measured at the weather station, and the dashed red line represents the level of the 'trigger' value threshold at 3,000 lux. The green dashed outline indicates the area that will be enlarged and shown in detail in the next Section.
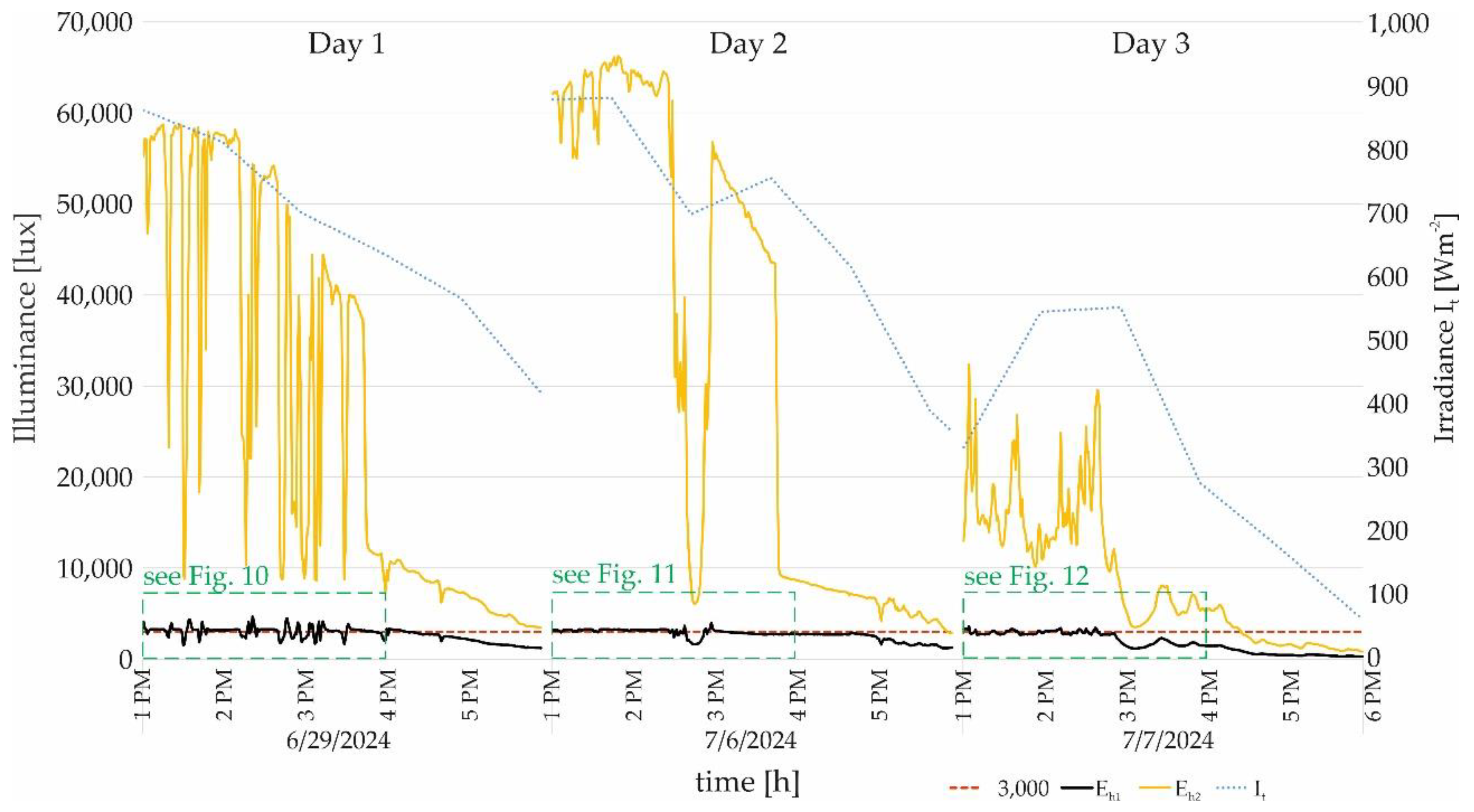
Figure 10.
A detailed analysis of measurements in chamber ‘1’ in the timeframe 1PM-4PM for Day 1. Black continuous line represents Eh1 measured in chamber ‘1’ (behind the KSS), continuous grey line represents EhB measured by the sensor ‘B’, and dashed grey line represents the EhB measured by the sensor ‘C’. The dynamics of experimental bi-sectional KSS are presented in a heatmap representing the inclination angle with colours (yellow illustrates open fins, α= 0°; blue illustrates closed fins, α = 60°). .
Figure 10.
A detailed analysis of measurements in chamber ‘1’ in the timeframe 1PM-4PM for Day 1. Black continuous line represents Eh1 measured in chamber ‘1’ (behind the KSS), continuous grey line represents EhB measured by the sensor ‘B’, and dashed grey line represents the EhB measured by the sensor ‘C’. The dynamics of experimental bi-sectional KSS are presented in a heatmap representing the inclination angle with colours (yellow illustrates open fins, α= 0°; blue illustrates closed fins, α = 60°). .
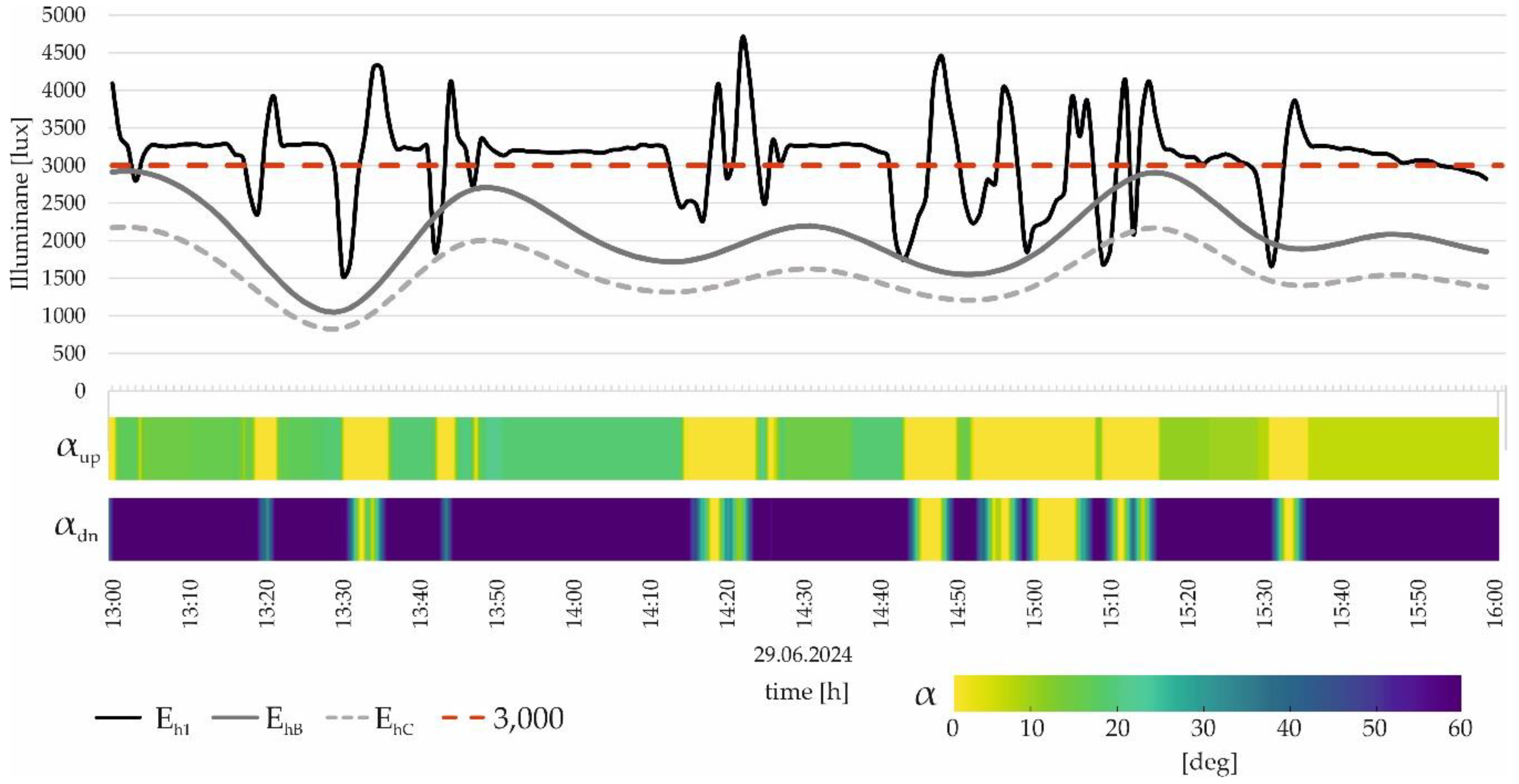
Figure 11.
A detailed analysis of measurements in chamber ‘1’ in the timeframe 1PM-4PM for Day 2. Black continuous line represents Eh1 measured in chamber ‘1’ (behind the KSS), continuous grey line represents EhB measured by the sensor ‘B’, and dashed grey line represents the EhB measured by the sensor ‘C’. The dynamics of experimental bi-sectional KSS are presented in a heatmap representing the inclination angle with colours (yellow illustrates open fins, α= 0°; blue illustrates closed fins, α = 60°). .
Figure 11.
A detailed analysis of measurements in chamber ‘1’ in the timeframe 1PM-4PM for Day 2. Black continuous line represents Eh1 measured in chamber ‘1’ (behind the KSS), continuous grey line represents EhB measured by the sensor ‘B’, and dashed grey line represents the EhB measured by the sensor ‘C’. The dynamics of experimental bi-sectional KSS are presented in a heatmap representing the inclination angle with colours (yellow illustrates open fins, α= 0°; blue illustrates closed fins, α = 60°). .
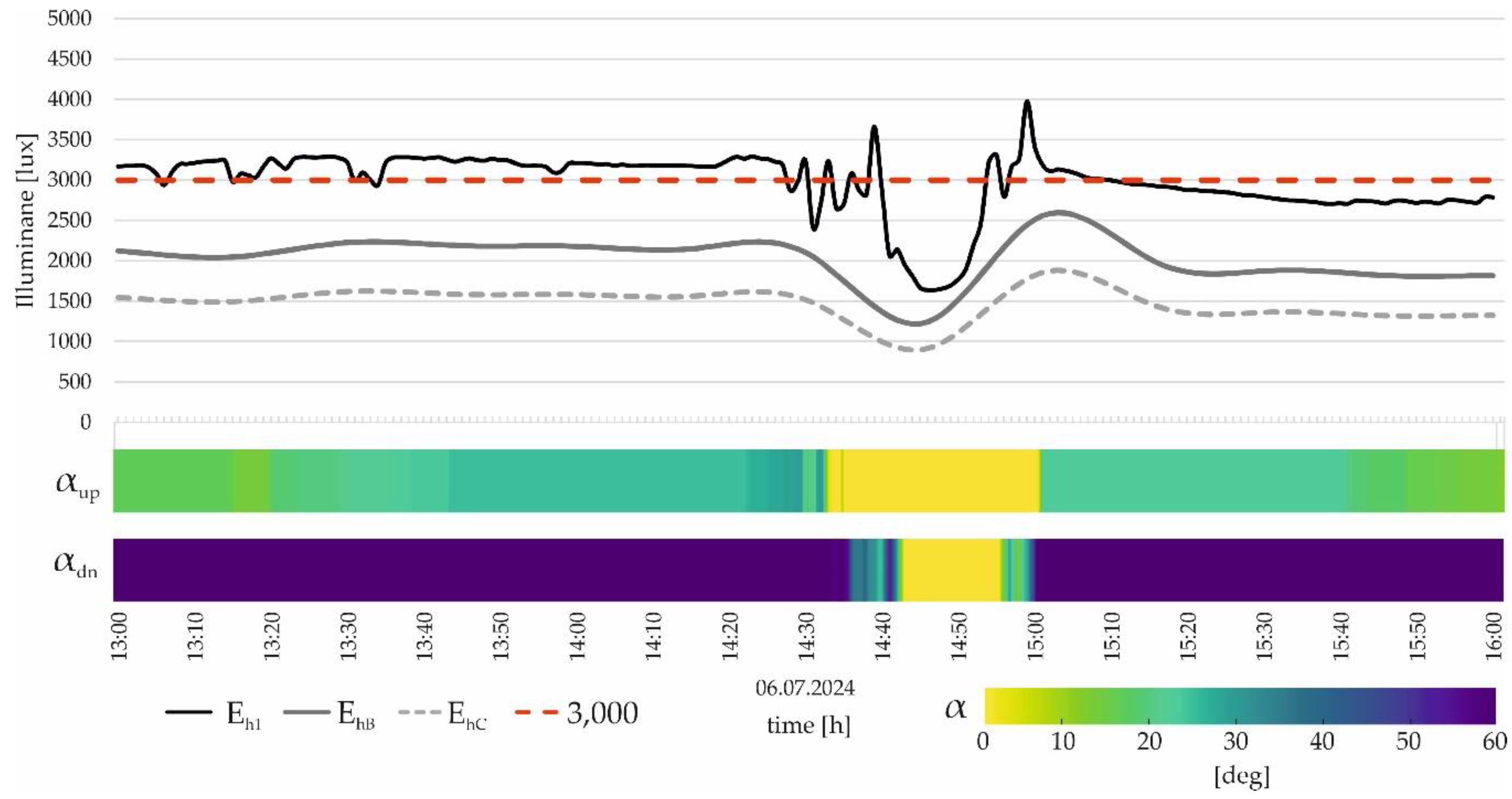
Figure 12.
A detailed analysis of measurements in chamber ‘1’ in the timeframe 1PM-4PM for Day 3. Black continuous line represents Eh1 measured in chamber ‘1’ (behind the KSS), continuous grey line represents EhB measured by the sensor ‘B’, and dashed grey line represents the EhB measured by the sensor ‘C’. The dynamics of experimental bi-sectional KSS are presented in a heatmap representing the inclination angle with colours (yellow illustrates open fins, α= 0°; blue illustrates closed fins, α = 60°).
Figure 12.
A detailed analysis of measurements in chamber ‘1’ in the timeframe 1PM-4PM for Day 3. Black continuous line represents Eh1 measured in chamber ‘1’ (behind the KSS), continuous grey line represents EhB measured by the sensor ‘B’, and dashed grey line represents the EhB measured by the sensor ‘C’. The dynamics of experimental bi-sectional KSS are presented in a heatmap representing the inclination angle with colours (yellow illustrates open fins, α= 0°; blue illustrates closed fins, α = 60°).
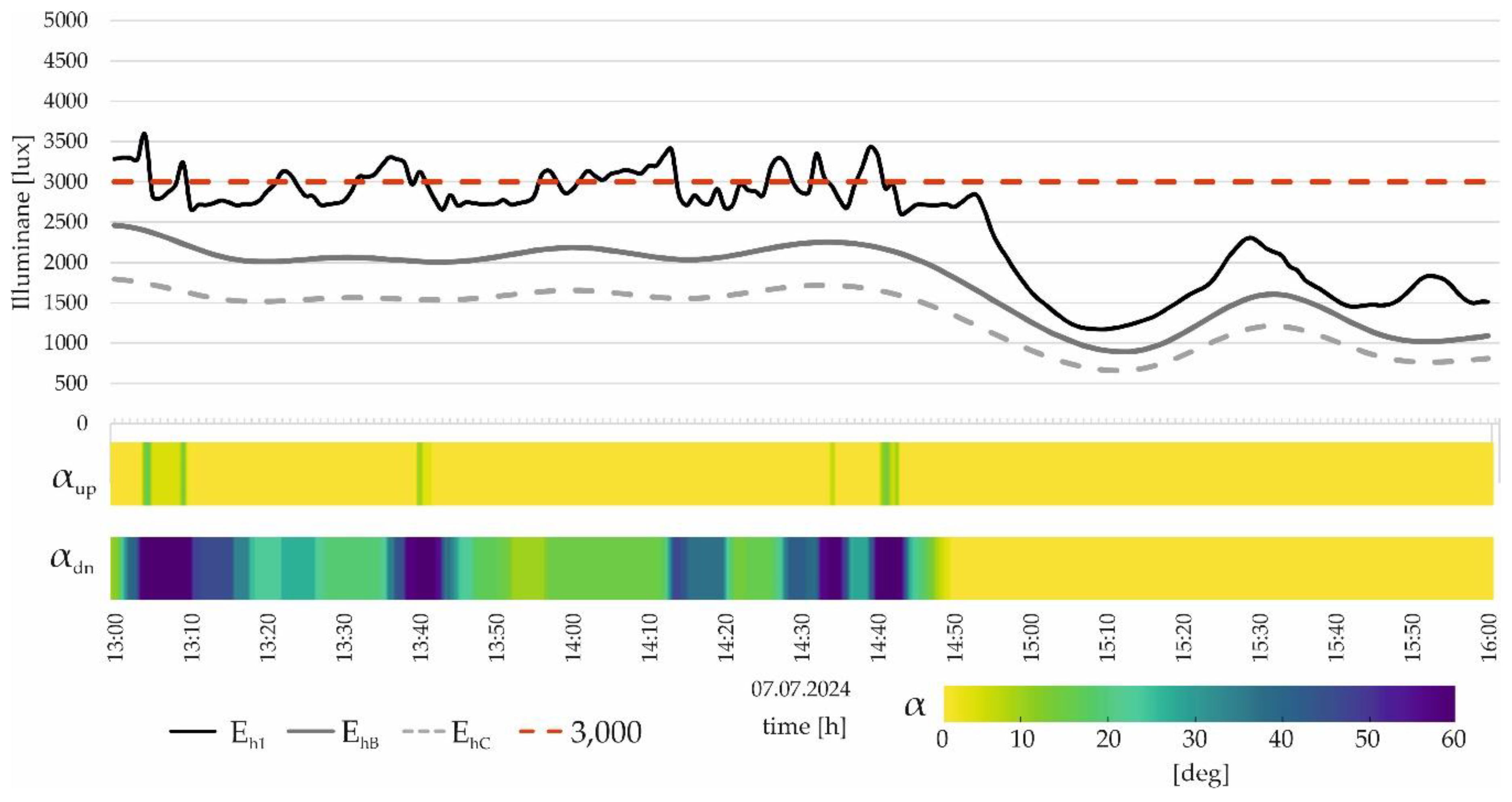
Table 1.
Overview of key kinetic facade system studies detailing authors, publication years, the primary research focuses and identified gaps. This summary supports the analysis of current trends and challenges within the field, as outlined in the ‘State of the Art' section.
Table 1.
Overview of key kinetic facade system studies detailing authors, publication years, the primary research focuses and identified gaps. This summary supports the analysis of current trends and challenges within the field, as outlined in the ‘State of the Art' section.
| Ref. No | Author: | Year: | Main Focus: | Research Gap: |
|---|---|---|---|---|
| [13] | Adriaenssens et al. | 2014 | ● Dialectic form-finding of a shading system using elastic deformations. | ● Reduction of actuation requirements not fully explored in practical applications. |
| [14] | Chan et al. | 2015 | ● Multi-sectional facade combining solar protection and light-redirecting devices. | ● Integration and real-world implementation challenges not addressed. |
| [15] | Wanas et al. | 2015 | ● Analysis of kinetic facades in Egypt using rotating and vertically moving shading louvres. | ● Limited geographic and climatic application scope. |
| [16] | Lee et al. | 2016 | ● Computational model for heat transfer and daylight lighting for external shading devices. | ● The effectiveness of the model in diverse environmental conditions not studied. |
| [17] | Cimmino et al. | 2017 | ● Tensegrity structures in kinetic facades with folding elements. | ● Lack of effectiveness data for the proposed system. |
| [18] | Sheikh et al. | 2019 | ● Adaptive biomimetic facade based on the redwood sorrel plant. | ● Practical implementation and long-term durability not discussed. |
| [19] | Grobman et al. | 2019 | ● Performance of vertical, horizontal, and diagonal fins in kinetic facades. | ● Comparative performance in different climatic conditions not analyzed. |
| [20] | Damian et al. | 2019 | ● Heat balance analysis for a kinetic shading system in office buildings. | ● Long-term energy savings and maintenance costs not considered. |
| [21] | Luan et al. | 2021 | ● Simulation study of kinetic shading systems inspired by origami. | ● Real-world application and effectiveness under variable conditions not tested. |
| [22] | Hosseini et al. | 2021 | ● Review of kinetic systems and steering scenarios. | ● Lack of practical examples and real-world testing. |
| [23] | Sankaewthong et al. | 2022 | ● Experimental study of a newly designed kinetic twisted facade. | ● Limited experimental data and scalability of the design. |
| [24] | Globa et al. | 2022 | ● Analysis of a hybrid kinetic facade with life cycle assessment. | ● Performance analysis of the facade not included. |
| [25] | Anzaniyan et al. | 2022 | ● Bio-kinetic facade integrating architecture, biomimicry, and occupant comfort. | ● Broader environmental impact and scalability not evaluated. |
Table 2.
Overview of the most recent studies in kinetic facade systems using louvres, detailing authors, publication years, the primary research focuses and identified gaps.
Table 2.
Overview of the most recent studies in kinetic facade systems using louvres, detailing authors, publication years, the primary research focuses and identified gaps.
| Ref. No | Author: | Year: | Main Focus: | Research Gap: |
|---|---|---|---|---|
| [26] | Sharma and Kaushik | 2023 | ● Evaluation of vertical and horizontal louvres in enhancing visual comfort metrics ● Optimal slat configurations for achieving desired daylighting and glare control |
● Lack of experimental data. |
| [27] | Mangkuto et al. | 2022 | ● Analysis of horizontal louvre systems in tropical climates to meet LEED v 4.1 requirements ● Determination of optimal slat configurations for balancing daylighting and energy efficiency |
● Static shading system satisfies LEED requirements only for south and north facades in tropical climates. |
| [28] | Catto Luchino & Goia | 2023 | ● Exploration of horizontal louvre systems in double-skin facades ● Development of control strategies for optimizing louvre-based kinetic facade systems in different architectural contexts |
● The need for empirical validation of the proposed control strategies ● Existing controls are limited to simpler, rule-based methods. |
| [29] | Hassooni & Kamoona | 2023 | ● Analysis of a horizontal louvre system in a hospital in Najaf, Iraq ● The practical application of deep louvres rotated at various angles reduces radiation exposure in healthcare environments. |
● Current studies primarily rely on simulations and controlled laboratory environments. |
| [30] | Shen and Han | 2022 | ● Evaluation of modular kinetic facade systems, including conventional and deformable louvre systems, ● Assessment of modular control strategies for enhancing kinetic facade functionality. |
● Studies rely heavily on simulations without extensive experimental validation in real-world scenarios. ● Complexity and cost of implementing model-based controls. |
| [31] | Ożadowicz & Walczyk | 2023 | ● Experimental study of a horizontal louvre system installed in Poland featuring perovskite PV installations, ● Optimization of louvre configurations to maximize energy production yield while effectively managing thermal and illuminance levels. |
● Need for more accurate experimental measurements over longer periods. ● Need for more advanced scenarios for controlling the dynamics of the façade movement. |
| [32] | De Bem et al. | 2024 | ● Presentation of a low-cost responsive shading system prototype based on horizontal louvres, ● Effectiveness of responsive louvre-based kinetic facade systems in improving thermal and illuminance management. |
● More accurate and long-term experimental measurements are needed ● The longevity and robustness of mechanical components need to be addressed |
| [33] | Kim et al. | 2022 | ● Exploration of electrochromic louvres for meeting daylight criteria and energy performance standards, ● Integration of electrochromic louvres with building energy management systems for sustainable building design. |
● Limited cross-validation of simulation results with real buildings ● Analysis restricted to equinox times, lacking comprehensive daily routine analysis |
| [34] | Norouziasas et al. | 2023 | ● Investigation of particularly dynamic shading systems in meeting energy performance standards, ● using control strategies recommended by ISO 52016–3. |
● An in-depth sensitivity analysis of control strategies is needed. ● The lack of implementation of ISO 52016–3 control strategies to other types of adaptive façade |
| [5] | Brzezicki | 2024 | ● Daylight Comfort Performance of a Vertical Fin Shading System, ● Construction of a reduced-scale mock-up for real weather measurements. |
● The temporally limited extent of experimental validation. ● Lack of analysis on the cost-effectiveness of static versus kinetic shading systems. |
| [35] | Naeem et al. | 2024 | ● Explored reduction of cooling loads using shape-memory alloy (Nitinol) springs in shading louvres, ● Integration of shape-memory alloy springs with building automation systems. |
● Lack of studies on the scalability of using smart materials like Nitinol, ● Insufficient data on the long-term performance and durability. |
| [36] | Vazquez and Duarte | 2022 | ● Conducted experimental research on bi-stable flexible materials actuated by shape-memory alloy (SMA) ● Development of control strategies for optimizing flap positions in bi-stable kinetic facade systems |
● Only evaluates daylight performance, not considering other metrics like glare, ● The a need for studies on the long-term performance and durability. |
Table 3.
Geometries' characteristics per material. This table includes all relevant optical properties and their corresponding materials, as detailed in the paragraph above.
Table 3.
Geometries' characteristics per material. This table includes all relevant optical properties and their corresponding materials, as detailed in the paragraph above.
| Vertical Surfaces |
Work Plane | Standard Window |
Kinetic Fins | Floor | |
|---|---|---|---|---|---|
| Material | White paint | Dark gray (RAL 7000) |
Transparent glass | Graymetal | Light gray |
| Reflectance | 0.80 | 0.23 | 0.19 | 0.5 | 0.65 |
| Transmittance | 0 | 0 | 0.64 1 | 0 | 0 |
1 Parameter of a double layer of 3 mm Pilkington Standard Glass.
Table 4.
Summary of Key Performance Metrics for Sensor 'A' and other custom-defined metrics.
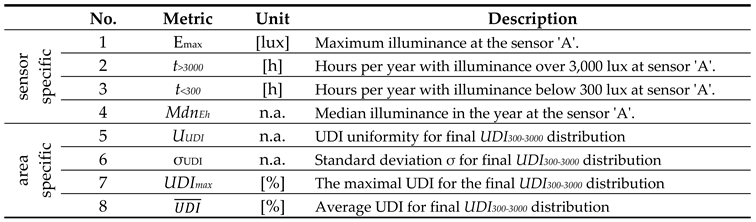
Table 5.
UDI Distribution and Quantitative Visual Comfort Metrics. This table presents the distribution of UDI300-3000 values and other quantitative metrics, such as Emax and standard deviation values, for evaluating visual comfort. The data compares scenarios with and without the operation of the FCS. North is oriented towards the top part of the diagrams.
Table 5.
UDI Distribution and Quantitative Visual Comfort Metrics. This table presents the distribution of UDI300-3000 values and other quantitative metrics, such as Emax and standard deviation values, for evaluating visual comfort. The data compares scenarios with and without the operation of the FCS. North is oriented towards the top part of the diagrams.
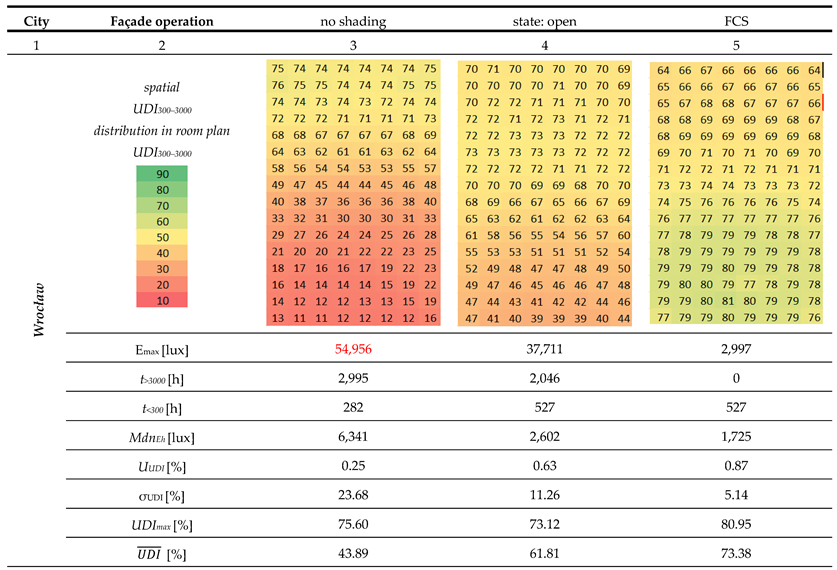
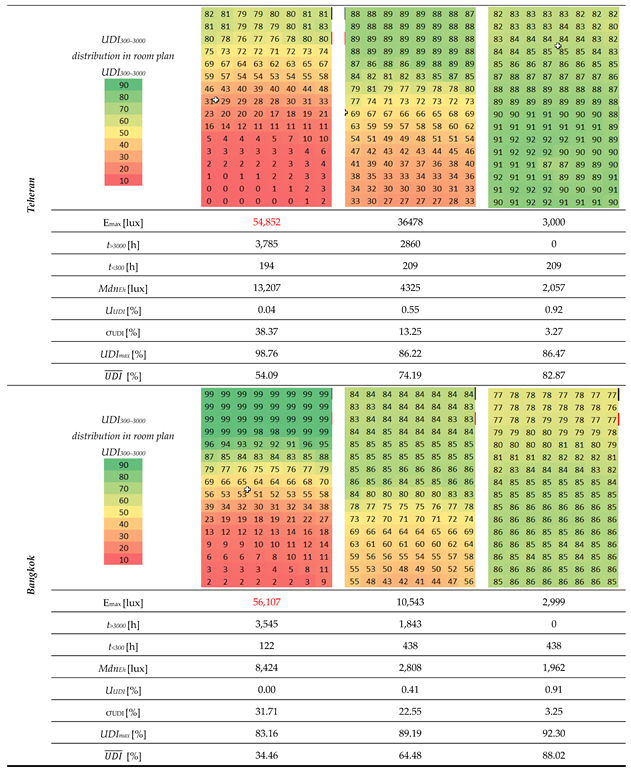
Table 6.
Percentage frequencies of kinetic shading system states for Wrocław, Tehran, and Bangkok. The table highlights the proportion of time each shading system state is active.
Table 6.
Percentage frequencies of kinetic shading system states for Wrocław, Tehran, and Bangkok. The table highlights the proportion of time each shading system state is active.
| State | Wrocław (%) | Tehran (%) | Bangkok (%) |
|---|---|---|---|
| night1 | 52.83 | 52.02 | 49.71 |
| open | 23.81 | 15.33 | 29.21 |
| down-closed | 23.36 | 32.65 | 21.08 |
| all-closed | 7.91 | 16.62 | 4.90 |
1 – below the threshold of detection.
Table 7.
Daylight Glare Probability values for different configurations of the KSS on 21 March at 10:00 AM in Wroclaw, Tehran and Bangkok—luminance distribution maps [cd/m-2]. The table compares the effectiveness of various facade closure configurations, including a newly tested 'up-closed' option, in mitigating glare during the equinox. Results illustrate significant variance in DGP across settings and locations, supporting the need for adaptive shading solutions.
Table 7.
Daylight Glare Probability values for different configurations of the KSS on 21 March at 10:00 AM in Wroclaw, Tehran and Bangkok—luminance distribution maps [cd/m-2]. The table compares the effectiveness of various facade closure configurations, including a newly tested 'up-closed' option, in mitigating glare during the equinox. Results illustrate significant variance in DGP across settings and locations, supporting the need for adaptive shading solutions.
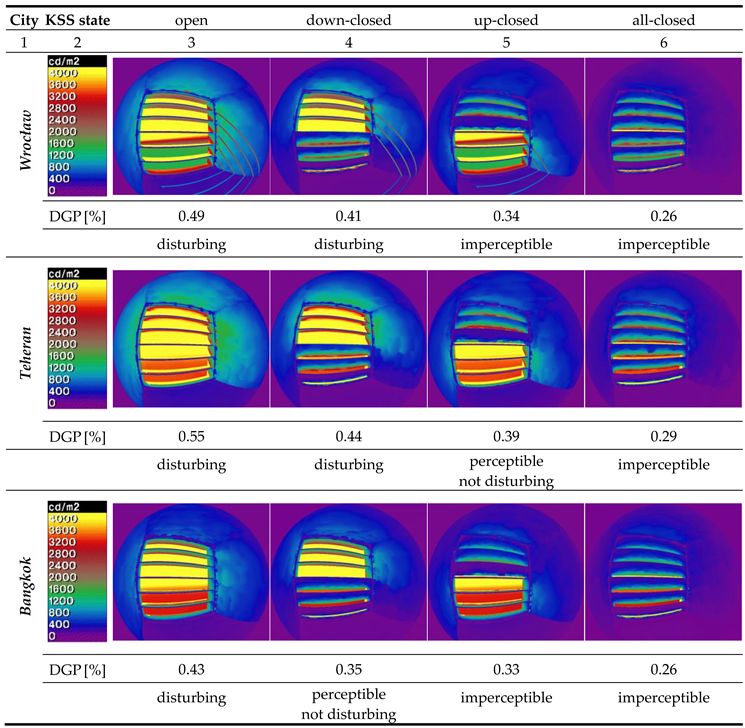
Table 8.
The list of measuring equipment.
| No. | Device | Function | Items | Characteristics | Accuracy |
|---|---|---|---|---|---|
| 1 | BH-1750 FVI | daylight sensor | 2 | illuminance range 1 – 65,535 [lux] |
±21 (±20)% |
| 1. | Testo THL 160 | daylightdata logger | 2 | illuminance range 0–20,000 [lux] |
±3% according to DIN 5032-7 Class L |
| UV Radiation range 0–10,000 mW × m−2 |
±5% | ||||
| 2. | Kipp and Zonen CM 11 |
pyranometer | 1 | irradiance range 0–1,400 W × m−2, sensitivity 4 to 6 [µV/W × m−2] |
±3% |
1 – minimal value (typical value), as stated by Rohm Semiconductors [50].
Table 9.
The overview of the essential climate data for Wrocław [51] according to WMO Guidelines on the Calculation of Climate Normals, WMO-1203.
Table 9.
The overview of the essential climate data for Wrocław [51] according to WMO Guidelines on the Calculation of Climate Normals, WMO-1203.
| Jan | Feb | Mar | Apr | May | Jun | Jul | Aug | Sep | Oct | Nov | Dec | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Temp. daily mean [°C] | 0.0 | 1.1 | 4.3 | 9.7 | 14.3 | 17.7 | 19.7 | 19.3 | 14.5 | 9.6 | 4.8 | 1.1 |
| Av. precipitation [mm] | 15.5 | 12.99 | 13.5 | 10.9 | 13.03 | 12.97 | 14 | 11.8 | 11.3 | 12.27 | 13.17 | 14.77 |
| Av. snowy days | 12.4 | 9.1 | 4 | 0.5 | 0 | 0 | 0 | 0 | 0 | 0.1 | 2.4 | 6.4 |
| Mean monthly sunshine hours [h] |
58.8 | 82.2 | 129.2 | 202.6 | 245.5 | 247.6 | 257.4 | 250.8 | 170.1 | 118.5 | 66.9 | 52.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



