Submitted:
26 July 2024
Posted:
26 July 2024
You are already at the latest version
Abstract
In this paper we introduce the Adomian decomposition method for a class of first order fuzzy dynamic equations on arbitrary time scales for existence of solutions. The results are provided with suitable numerical examples.
Keywords:
Fuzzy dynamic equation
; time scale
; Adomian decomposition method
MSC: 35A01; 35F21; 47H10; 70H20
1. Introduction
The theory of dynamic equations has many interesting applications in control theory, mathematical economics, mathematical biology, engineering and technology. In some cases, there exists uncertainty, ambiguity or vague factors in such problems, and fuzzy theory and interval analysis are powerful tools for modeling these equations on time scales.
In this paper, we introduce the Adomian decomposition method for the following class of first order fuzzy dynamic equations
where
- (A1)
- , , , is an arbitrary time scale with forward jump operator and delta differentiation operator and , respectively.
Here denotes the set of all real fuzzy numbers, denotes the zero fuzzy number and denotes the first type fuzzy delta derivative on .
To the best of our knowledge, there is a gap in the references for investigations of the Adomian decomposition method for fuzzy dynamic equations on time scales. Here, in this paper we try to fill out this gap.
This paper is organized as follows. In the next section, we give some basic definitions and facts of fuzzy dynamic calculus on time scales. In Section 3, we give an exposition of the Adomian decomposition method on time scales. In Section 4 we introduce the Adomian decomposition method for the problem (1), (2). In Section 5, we give a numerical example.
2. Fuzzy Dynamic Calculus Essentials
In this section, we will give some basic definitions and fact of fuzzy dynamic calculus on time scales. For detailed study of fuzzy dynamic calculus on time scales we refer the reader to the book [2].
Suppose that is a time scale with forward jump operator and delta differentiation operator and , respectively. With we will denote the space of the real fuzzy numbers and with we will denote the Hausdorff distance between the real fuzzy numbers. For more details for fuzzy numbers and Hausdorff distance between the real fuzzy numbers we refer the reader to the appendix of the book [2].
Definition 1.([2]) Assume that is a fuzzy function and . Then f is said to be first type right fuzzy delta differentiable at t, shortly right -differentiable at t, if there exists an element with the property that, for any given , there exists a neighbourhood of t, i.e., for some , such that for all the H-difference exists and
with . In this case, is said to be first type right fuzzy delta derivative of f at t, shortly right -derivative of f at t.
Definition 2.([2]) Assume that is a fuzzy function and . Then f is said to be first type left fuzzy delta differentiable at t, shortly left -differentiable at t, if there exists an element with the property that, for any given , there exists a neighbourhood of t, i.e., for some , such that for all the H-difference exists and
with .
Definition 3.([2]) Let be a fuzzy function and . Then f is said to be first type fuzzy delta differentiable at t, shortly -differentiable at t, if f is both first type left and right fuzzy delta differentiable at and , and we will denote it by . We call the first type fuzzy delta derivative of f at t, shortly -derivative of f at t. We say that f is first type fuzzy delta differentiable at t, shortly -differentiable at t, if its -derivative exists at t. We say that f is first type fuzzy delta differentiable on , shortly -differentiable on , if its -derivative exists at each . The fuzzy function is then called first type fuzzy delta derivative, shortly -derivative of f on .
The defined -derivative has the following properties.
Theorem 1.([2]) If the -derivative of f at exists, then it is unique. Hence, -derivative is well-defined.
Theorem 2.([2]) Assume that is a continuous function at and is right-scattered. Then f is -differentiable at and
Theorem 3.([2]) Assume that is -differentiable at . Then f is continuous at t.
Theorem 4.([2]) Let be a fuzzy function and let be right-dense. Then f is -differentiable at t if and only if the limits
exist and satisfy the relations
Theorem 6.([2]) Let be -differentiable at . Then is -differentiable at and
Theorem 7.([2]) Let be -differentiable at . Then for any the function is -differentiable at and
Theorem 8.([2]) Let , and , . If f is -differentiable at t, then is -differentiable at t and
Now, we introduce the conception for the first type fuzzy delta integration on time scales. Let .
Definition 4.([2]) A function is called a sector of the fuzzy function if for all . The set of all rd-continuous sectors of F on I is denoted by .
Theorem 10.([2]) Let , , be -integrable. Then is -integrable and
Theorem 14.([2]) If is -differentiable on , then
Theorem 15.([2]) Let be -integrable. Then
Theorem 16
3. The Adomian Decomposition Method on Time Scales
In this section, we will describe the Adomian decomposition method on arbitrary time scale with forward jump operator and delta differentiation operator and , respectively. The exposition in this section, follows the exposition in [3].
Denote the set consisting of all possible strings of length n, containing exactly k times and times operators by . Then we have
for every . For , , set
and for any , we have
For , , define the polynomials
Note that
Note also that
and
whereupon
and so on. Below we denote by , , the constants for which
Suppose that is a given function which has a convergent series expansion of the form
Suppose also that is a given analytic function such that
where , , are given by
Here the functions denote the sum of products of components of u given in (10), whose subscripts sum up to n, divided by the factorial of the number of repeated subscripts, i.e.,
and so on. Suppose now that u is given by the convergent series
We wish to find the respected transformed series for . From (10), we have
and hence,
Thus,
Hence,
For , we have
Thus,
For , we find
or
whereupon
For , we have
or
Then
or
whereupon
For , we find
or
whereupon
and so on. We get the following result.
4. The Adomian Decomposition Method for the Problem (1), (2)
In this section, we will introduce the Adomian decomposition method for the problem (1), (2). Firstly, note that the problem (1), (2) can be rewritten in the form
Consider the problem
where is an analytic function. We propose a solution of the IVP (13), in the form
Like in the general case, we suppose that
We have
and
Let
Then we have
Taking the Laplace transform of both sides of the dynamic equation (13) we obtain
Then we obtain
Now, by taking inverse Laplace transform of both sides, we get
Employing (14), we have
In order to equate the coefficients of the time scale monomials on both sides, we reorder the sums as follows.
This results in the following nonlinear system for determining the constants , .
Notice that the system is infinite and nonlinear in its unknowns. However, the nonlinearity is of polynomial type. This is a results of the nonlinear structure of the function .
Now, consider the problem
where is an analytic function. We will search a solution of the IVP (17), in the form
Assume that
We have
and
As above, we get the following system for the constants , .
5. A Numerical Example
Consider the initial value problem associated with the first order nonlinear fuzzy dynamic equation of the form
. Consider the IVP
Assume that the solution has the series representation
where , are the coefficients to be determined.
where
The infinite nonlinear system for this example has the form
Solving this nonlinear system one can approximately obtain , , and hence, the approximate solution of the initial value problem which is
As above,
where
Let and . Then , , and
Next,
Really,
Moreover,
Indeed,
Note that
Then
For , we get
whereupon
Therefore . For , we find
or
or
whereupon we get the system
whose solutions are
Next,
or
, or
whereupon we get the system
whose solutions are
Now, we consider the first four equations of (23) with the following approximations
or
whereupon we get
Replacing with , we find
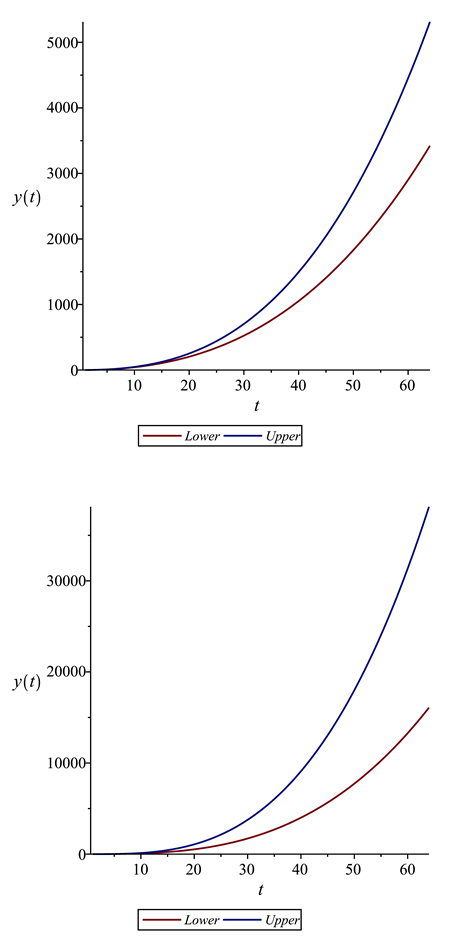
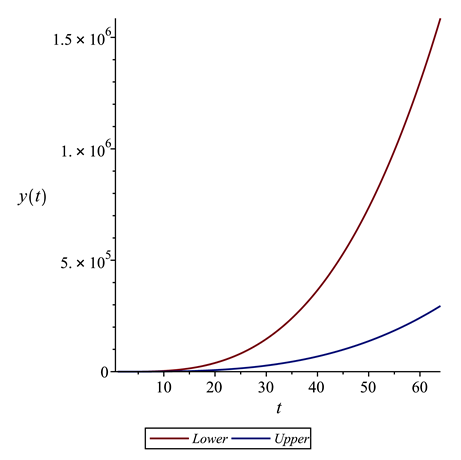
Therefore approximative solutions are
and
In figures below are shown the solutions for , and , respectively, at .
References
- R. P. Agarwal, M. Meehan and D. O’Regan, Fixed Point Theory and Applications, Cambridge University Press 12, (2001).
- S. Georgiev. Fuzzy dynamic equations, dynamic inclusions and optimal control problems on time scales, Springer, 2021.
- S. Georgiev and I. Erhan. Numerical Methods on Time Scales, De Gryuter, 2022.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



