
Submitted:
26 July 2024
Posted:
30 July 2024
You are already at the latest version
Abstract
Using a scaling symmetry, it is shown how to compute polynomial conservation laws, generalized symmetries, recursion operators, Lax pairs, and bilinear forms of polynomial nonlinear partial differential equations thereby establishing their complete integrability. The Gardner equation is chosen as the key example for it comprises both the Korteweg-de Vries and modified Korteweg de Vries (mKdV) equations. The Gardner and Miura transformations which connect these equations are also computed using the concept of scaling homogeneity. Exact solitary wave solutions and solitons of the Gardner equation are derived using Hirota’s method and other direct methods. The nature of these solutions depends on the sign of the cubic term in the Gardner equation and the underlying mKdV equation. It is shown that flat (table-top) waves of large amplitude only occur when the sign of the cubic nonlinearity is negative (defocusing case) whereas the focusing Gardner equation has the standard elastically colliding solitons. The paper’s aim is to provide a review of integrability properties and solutions of the Gardner equation and illustrate the applicability of the scaling symmetry approach. The methods and algorithms used in this paper have been implemented in Mathematica but can be adapted for major computer algebra systems.
Keywords:
Gardner equation
; scaling symmetry
; integrability
; solitary waves
; solitons
; symbolic computation
1. Introduction
Several physically important nonlinear partial differential equations (PDEs) are completely integrable by the Inverse Scattering Transform (IST) which can be viewed as the nonlinear analog of the Fourier transform (see, [1,3,56] and references therein). Arguably, the most well-known completely integrable PDEs are the Korteweg-de Vries (KdV), modified KdV (mKdV), nonlinear Schrödinger, and sine-Gordon equations. They model wave phenomena in a wide range of applications in modern theoretical and mathematical physics, including fluid dynamics, nonlinear optics, and plasma physics, to name a few.
“Complete integrability” is an elusive term [69] but completely integrable equations have remarkable properties and a rich mathematical structure. For instance, they possess infinitely many conservation laws and high-order symmetries. They admit a Lax pair where the nonlinear PDE is replaced by a pair of linear equations whose compatibility only holds on solutions of the nonlinear PDE. They can be viewed as infinite dimensional Hamiltonian systems with two or three different Hamiltonians. By applying a change of dependent variable, completely integrable PDEs can be transformed into equations that are homogeneous of degree (second or higher) in that new variable and be recast in bilinear form in terms of Hirota operators [28,34]. Most importantly, completely integrable PDEs have solitary waves solutions that maintain their shape and speed while propagating at a constant velocity, and soliton solutions made up of such solitary waves that collide elastically. Nowadays, the terms solitary wave and soliton are used interchangeably, without reference to the elastic scattering property.
To get an initial idea about the possible complete integrability of a PDE, one should check if the equation has the Painlevé property [1,3], meaning that its solutions have no worse singularities than movable poles. To do so, one runs the so-called Painlevé test [8] which is algorithmic and can be performed with our Mathematica code PainleveTest.m [5]. If a PDE passes the Painlevé there is no guarantee that it is completely integrable but it is more likely than not to have special properties, viz., conservation laws, generalized symmetries, and so on.
In this paper we use the concept of scaling homogeneity, to symbolically compute conserved densities, fluxes, higher-order symmetries, Lax pairs, bilinear forms, and Miura-type transformations for polynomial systems of PDEs, thereby testing their complete integrability in a variety of ways. To keep the paper accessible to non-experts, we only cover PDEs in dimensions, i.e., one space variable in addition to time . To illustrate the steps of the computations we focus on the Gardner equation which comprises the KdV and mKdV equations as special cases. Therefore, the results for those two important soliton equations are obtained without extra effort. This paper’s purpose is to provide a review of integrability properties and solutions of the Gardner equation and illustrate the applicability of the scaling symmetry approach for investigating the complete integrability of polynomial nonlinear PDEs.
Scaling (or dilation) homogeneity is a feature common to many nonlinear PDEs and it provides an elegant way to find, e.g., densities and higher-order symmetries. Indeed, these scalar quantities can be derived as linear combinations with undetermined (constant) coefficients of scaling homogeneous polynomial terms in the dependent variables and their derivatives. Since the defining equations for these quantities are linear, the method boils down to solving linear systems for the undetermined coefficients.
For conservation laws, the time derivative of a candidate density must be the total derivative of an unknown flux. To test this type of “exactness” we use the Euler operator from the calculus of variations. An automated computation of the corresponding fluxes requires integration by parts on the so-called jet space. In essence, one needs to integrate expressions involving arbitrary functions. Unfortunately, computer algebra systems (CAS) often fail at that task. To circumvent the shortcoming, we use the homotopy operator from differential geometry which reduces the problem to a one-dimensional integral with respect to an auxiliary parameter.
The existence of a sufficient large number of non-trivial densities suffices to establish complete integrability of the given PDE. In most cases, the corresponding fluxes are not needed. However, for some equations, e.g., the Kadomtsev-Petviashvili equation [1,3], it is necessary to swap the independent variables to be able to rewrite the PDE as a system of evolution equations. Doing so, the roles of density and flux get interchanged and that is why we also show the computation of the flux.
The computation of higher-order symmetries is done with the same methodology without having to rely on the relationship between symmetries and conservation laws, as expressed through Noether’s theorem. The scaling homogeneity concept and the method of undetermined coefficients also apply to recursion operators which connect the generalized symmetries. Of course, the recursion operator is hard to compute because it involves total derivatives and anti-derivatives. Fortunately, the defining equation for the recursion operator is linear, which again reduces the problem to solving a linear system. By applying the recursion operator to a low-order generalized symmetry, one can generate all higher-order symmetries one after another. Thus the existence of a recursion operator provides proof that a nonlinear PDE is completely integrable. With the recursion operator one can build an hierarchy of completely integrable equations which have the same properties as the original nonlinear PDE. For example, the well-known Lax equation [19,28] which is of fifth order in x is the first higher-order generalized symmetry of the KdV equation [20]. When encountering a allegedly “new” nonlinear PDE of high-order in the literature one should verify that it does not belong to the hierarchy of symmetries of a well-studied PDE of lower order.
The computation of Lax pairs based on scaling homogeneity is more challenging because the defining equation is no longer linear and, then the method of undetermined coefficients leads to a nonlinear algebraic system with quadratic or affine linear terms. It is still quite straightforward to solve but, if parameters are present, finding the conditions on the parameters for which solutions exist is substantially harder. The knowledge of a Lax pair is essential to apply the IST which allows one to solve the initial value problem for a nonlinear PDE and, consequently, find solitary wave solutions and solitons. Getting a Lax pair is the first step in the application of the IST and Riemann-Hilbert method to find soliton solutions. Using the Lax pair one can also derive conservation laws, and many other properties of the nonlinear PDE.
The same thing happens when applying the scaling homogeneity method to compute the Miura and Gardner transformations. Here again one has to solve nonlinear systems for the undetermined coefficients. The Miura transformation, which connects the KdV and mKdV equations, had a profound impact on the discovery of conservation laws of both equations and, in general, the early development of the notion of complete integrable of PDEs and soliton theory.
To apply Hirota’s direct method for finding solitary waves and solitons, the given PDE must be cast in bilinear form. Finding that bilinear representation is a non-trivial task which requires some insight, experience, and often ingenuity as explained in [28]. Our scaling-homogeneity approach is still helpful but has its limitations, in particular, if finding a bilinear representation requires splitting an expression into two parts in such a way that each part can be written in bilinear form. This is exactly what must be done with the mKdV and Gardner equations and, as far as we know, there is no algorithmic way to do this. Once the bilinear representation is found, special solutions, including solitary waves and solitons can be computed algorithmically.
As we will also show in Section 9, the Gardner equation can be transformed into the mKdV equation by a Lorentz transformation. Consequently, any time new solutions of the mKdV equation are discovered one has additional solutions to the Gardner equation. The search for new solutions, in particular, for the defocusing mKdV equation is still an active area of research (see, e.g., [45,59,61]).
Over the last two decades, our research team has designed and implemented fast algorithms [7,18,53], to test the integrability of nonlinear PDEs based on the scaling symmetry method [19,20,27,29,30,32,55]. In addition, we implemented a simplified version of Hirota’s method [21,28] and other direct methods [6,10] to find exact solutions of nonlinear PDEs. As a matter of fact, the computations in this paper have been largely done with our software packages which are written in Mathematica syntax but could be adapted for other computer algebra systems such as Maple and REDUCE.
The paper is organized as follows. In Section 2 we introduce the Gardner equation and mention some of its applications. As shown in Section 3, the Gardner equation passes the Painlevé test which indicates that the equation likely has many interesting properties. In Section 4 we discuss the scaling symmetry of the Gardner equation as well as the KdV and mKdV equations. Section 5 is devoted to the computation of conservation laws. Section 6 and Section 7 cover the computation of generalized symmetries and the recursion operator that connects them. In Section 8, we turn our attention to the computation of a Lax pair for the Gardner equation. The derivation of a bilinear representation is covered in Section 9. The computation of the Gardner transformation (connecting solutions of the Gardner equation and KdV equations) is shown in Section 10.
With the important quantities of the Gardner equation being computed, we show in Section 11 and Section 12 how our results translate to the KdV and mKdV equations. Solitary wave solutions and solitons are covered in Section 13 and Section 14, where we show that the nature of the solutions of the Gardner and mKdV equations depends on the sign of the cubic nonlinearity. A brief discussion of our software packages used in this study is given in Section 15. Finally, in Section 16 we draw some conclusions and mention a few topics for future work.
2. The Gardner Equation
The Gardner equation [17] is the nonlinear PDE
where is the dependent variable (or field) which is a function of space variable x and time t. The subscripts denote partial derivatives, i.e., and The parameters and are real numbers for which the values and are frequently used in the literature.
The Gardner equation has the KdV and mKdV equations as special cases. Therefore, (1) is sometimes called the combined or mixed KdV-mKdV equation. Indeed, for , the (1) reduces to the ubiquitous Korteweg-de Vries equation [37],
which models, e.g., shallow water waves [26], ion-acoustic waves in plasmas [1,3,14] and many other nonlinear wave phenomena where solitons arise. When , (1) becomes the mKdV equation [1,17],
which models internal ocean waves, electromagnetic surface waves, waves in plasmas, and more [1].
Eq. (1) appears for the first time in [42,44] in the context of the Miura transformation (see Section 10) which connects the mKdV and KdV equations. The Gardner equation has a long history [17,35] and many applications [70] in fluid dynamics, in particular, for modeling long internal water waves [22,41], the dynamics of undular bores [36], and waves in multi-species plasma physics [47,48,62,63]. There is a wealth of information available about the Gardner equation. The equation appears in most books about solitons and integrability (see, e.g., [26] which has a list of soliton books).
Without loss of generality we take in (1) because, if , replacing u by would make the coefficient of positive again. However, no discrete symmetries of or u will flip the sign of the coefficient of so the cases for positive and negative will have to be treated separately. Exact solutions of (1) with , called the focusing Gardner equation, are quite different from these of the defocusing case where .
We focus on (1) because it is a typical example of a scalar -dimensional evolution equation,
of order n in x and first order in t, with in (1). More importantly, many of the results for (1) lead to the corresponding results for the KdV and mKdV equations by setting or , respectively. Like the latter two equations, the Gardner equation is known to be completely integrable for both signs of but the solutions are quite different for and . The latter case is the hardest to deal with. The solitary wave solutions and solitons for the focusing Gardner equation follow from those of a focusing mKdV equation to which the Gardner equation can be reduced. The so called “table-top” or “flat-top” soliton, corresponding to a large amplitude, only exists for the defocusing Gardner equation.
3. Painlevé Analysis
In this Section we check if (1) has the Painlevé property. Performing the Painlevé test is straightforward but usually involves lengthy computations. In essence, one investigates a Laurent series solution for (1),
in which the coefficients are analytic functions in a neighborhood of the singular manifold . Furthermore, determines the poles and is assumed to be non-characteristic (i.e., ). The negative integer determines the leading order term, , in (5). We summarize the main steps of the Painlevé test and refer to [8] for details.
- Step 1: Compute the leading order term. To determine and , substitute into (1). Balance the minimal power terms in g, namely, and , to get . Next, require that the leading terms (in vanish, yielding
-
Step 2: Compute the resonances. In this step one determines which functions in (5) will remain arbitrary. That happens at specific values of k, called resonances, denoted by r. To find the resonances, substitute , with and given in (6) or (7) into (1), and equate the coefficients of the dominant terms (in ) that are linear in to get the characteristic equationSince the resonances are , and Resonance corresponds to the arbitrariness of g.
- Step 3: Check the compatibility conditions. To do so, substituteinto (1) and verify that and can be unambiguously determined. Also verify that and are indeed arbitrary functions, meaning that no compatibility conditions arise. For (1), one readily determines the real functions,when (and complex expressions when ). At resonance , the compatibility condition (arising as the coefficient of ),is identically satisfied upon substitution of (6) and (10). Likewise, a long but straightforward computation shows that the compatibility condition at (appearing at order ),is identically satisfied upon substitution of (6), (10), and (11).
So, at least in the neighborhood of , solution (9) is free of algebraic and logarithmic movable branch points. Apart from possible essential singularities (which the test is unable to detect), the movable singularities of its general solution are poles determined by . Note that (5) serves as a general solution because, as required by the Cauchy-Kovalevskaya theorem, (1) is of order 3 in x and that number agrees with 3 arbitrary functions , and in (5).
Also, notice that truncating the Laurent series at the constant level term yields an auto-Bäcklund transformation,
because for an arbitrary , both and must then be solutions of (1) with . Setting in (14) motivates the Hirota transformation discussed in Section 9 where it is shown that only for one can find soliton solutions of (1).
In conclusion, the Gardner equation passes the Painlevé test and, therefore, has the Painlevé property which is a good predictor for the equation to have conservation laws, generalized symmetries, and so on. The investigation and actual computation of these quantities is based on a scaling symmetry of (1) which we will discuss next.
4. Scaling Symmetry
As stated, when the Gardner equation reduces to the KdV equation (2) which is scaling homogeneous under the scaling (dilation) symmetry
where is an arbitrary scaling parameter. Indeed, replacing in the KdV equation in terms of yields
A fast way to compute (15) is to introduce the notions of weight, rank, and uniformity of rank. The weight, W, of a variable is the exponent of that multiplies that variable. Thus, based on (15), , and . Equivalently, and The rank of a monomial is defined as the total weight of the monomial. For example, has rank 5 since the parameter has no weight. An expression (or equation) is uniform in rank if all its monomial terms have equal rank.
Now, if (15) were not known yet, it could quickly be found by requiring that the KdV equation is uniform in rank, yielding
Solving (17) gives and Since is arbitrary, without loss of generality one can set , resulting in and So, requiring uniformity in rank of a PDE allows one to compute the weights of the variables (and, hence, the scaling symmetry) with linear algebra.
Setting , the Gardner equation becomes the mKdV equation. Requiring uniformity in rank readily yields and Hence, the mKdV equation is scaling homogeneous under the transformation
Because is different for the KdV and mKdV equations, the Gardner equation (1) will not be uniform in rank unless we use a trick. We will let the parameter scale with some power of . Doing so, we must solve
yielding
which expresses that (1) has scaling (or dilation) symmetry
Starting with conservation laws, in what follows we will use the scaling symmetry to compute important quantities related to (1) and thereby establishing its complete integrability.
5. Conservation Laws
A conservation law of (4) is an equation of the form
where the dot means that the equality should only hold on solutions of (4). is called a conserved density (or charge) and J is the corresponding flux (or current).
The scalar functions and J are functions of u and its partial derivatives with respect to x. All subsequent computations are done on the jet space which means that u and its partial derivatives with respect to x are treated as independent, and also all monomials such as etc. The density and flux could also explicitly depend on x and t but we will not cover such exceptional cases.
If J vanishes at infinity (because u and its x-derivatives decay to zero), then
is constant in time often referred to as a conserved quantity or constant of motion. Depending on the physical setting, the first few constants of motion express conservation of mass, momentum, and energy. Preserving these types of quantities plays in important role in testing the accuracy of numerical integrators.
In (22), is the total derivative with respect to defined by
where is the Fréchet derivative of in the direction of and M is the highest order of in x. In practice, one simply applies the chain rule for differentiation with respect to t treating , etc., as independent functions.
Likewise, is the total derivative with respect to x,
where N is the order of J.
Since (22) is linear in the densities (and fluxes) a linear combination of densities with constant coefficients is still a density. The matching flux would, of course, be a linear combination of the corresponding fluxes with the same constant coefficients.
Indeed, (26) is (1) written as a conservation law. Next, (27) straightforwardly follows after multiplication of (1) by and a bit of integration by parts. Clearly, (28) is far less obvious and will require a computational strategy.
Notice that the above densities are uniform in rank. Indeed, has rank 1, has rank 2, and is of rank 4. The corresponding fluxes are also uniform with ranks and As a matter of fact, the entire conservation laws themselves are uniform in rank with ranks and 7, respectively. This comes as no surprise because the defining equation (22) is only non-trivial if evaluated on solutions of the PDE and therefore the densities, fluxes, and conservation laws “inherit” (or adopt) the scaling homogeneity of the given PDE (and all its other continuous and discrete symmetries for that matter).
It turns out that the list of conservation laws of (1) continues ad infinitum. The Gardner equation has infinitely many conservation laws which is a clear indication that the PDE is completely integrable.
Using the scaling symmetry (21), we will now show how to compute (28) which is the shortest possible density of rank 4 since it is free of any terms that could be moved into the flux.
-
Step 1: Construct a candidate density of rank 4 as follows: Make a list of all monomials in u and of rank 4 or less, i.e., , , , , . For the construction of candidate densities the constant terms can be removed. Then, for each monomial in that list apply the correct number of x-derivatives so that the resulting term has exactly rank 4. The terms in the first sublist need no derivatives. Those in the second sublist need a single derivative. The next set of terms need two derivatives, etc. For example, for the first element in the third sublist, Obviously, if we carry out partial integration, the highest derivative term only differs from by the x-derivative of and therefore can be ignored. Likewise, terms like , , , and can be neglected because they are x-derivatives of single-term monomials (, , etc.). There is no need to put terms like , in the density because they can be moved to the flux.Gather the resulting monomials after stripping off numerical factors and removing scalar multiples of single-term densities of lower rank (with regard to (26) and (27) these are and ). Finally, linearly combine the remaining terms with constant coefficients, yieldingwhich is of first order in x ().
-
Step 2: Compute the undetermined coefficients. Using (24), first computewhere is the identity operator. Replace and from (1) to getNext, find the constants and so that matches for some flux J (to be computed in Step 3 below). Mathematically, this means that E must be exact. The Euler operator (variational derivative),allows one to test exactness [30,31,32]. K is the order of the expression the Euler operator is applied to. So, for E in (31). Consequently, (32) will terminate after five terms. E will be exact if on the jet space (treating , etc., and also all monomials in such variables as independent). The computation of the terms in (32) involves nothing more than partial differentiations followed by (total) differentiations with respect to x. Of a total of 30 terms (not shown) generated, many terms get canceled and one is left withwhich must vanish identically, yielding the linear system and with solution . Substitute these constants into (29) to getthe same expression as in (28). If one were only interested in the density, the computation would finish here. To continue with the computation of the flux (in the next step), substitute the constants into (31) yielding
- Step 3: Compute the flux. Since , to get one must integrate E with respect to x and reverse the sign. There is a tool from differential geometry, called the homotopy operator [49], to carry out integration by parts on the jet space. As will be shown below, application of the homotopy operator reduces the integration on the jet space to a standard one-dimensional integration with respect to an auxiliary variable which will be denoted by .
6. Generalized Symmetries
A second criterion to establish the complete integrability of (1) is to show that the PDE has infinitely many generalized (higher-order) symmetries. As we will see, the computation of a hierarchy of such symmetries [20] is algorithmic and easier than for conservation laws.
A scalar function is called a generalized symmetry of (4) if and only if it leaves (4) invariant under the replacement within order , that is,
must hold up to order on the solutions of (4). Consequently, G must satisfy the linearized equation
where is the Fréchet derivative of F in the direction of G:
where n is the (highest) order of F. In (40) and (42), one must not only replace u by but also by , by , etc. As before, is the identity operator. The total derivative operators, and , were defined in (24) and (25), respectively. Since the defining equation (41) is evaluated on solutions of the PDE, the higher-order symmetries inherit the scaling homogeneity of (4).
With regard to the weights in (20) the above symmetries are of ranks , and 6, respectively.
Except for , each of these symmetries leads to a completely integrable nonlinear PDE, , where the weight of t increases as j increases. Notice that corresponds to (1) itself.
Although the computation of symmetries is algorithmic and technically simpler than for densities, it still requires the computation of a plethora of terms and is best handled with symbolic software [20]. As an example, we show how to compute of rank 6.
-
Step 1: Construct a candidate symmetry of rank 6 as follows: List all monomials in u and of rank 6 or less, i.e., , , , , , , without the constant terms .Then, apply the correct number of x-derivatives to the monomials in each of the six sublists so that the resulting terms have exactly rank 6. The elements in the first sublist need no derivatives. Those in the second sublist need a single derivative, etc. For example, for the first element in the fourth sublist, compute Do this for each element in all sublists and gather the resulting monomials after stripping off numerical factors. To avoid that lower-rank symmetries are recomputed, remove scalar multiples of single-term symmetries of lower rank as well as scalar multiples of the highest-derivative term in multiple-term symmetries of lower rank. Thus, with regard to (44) and (45), the monomials and can be removed. Finally, linearly combine the remaining terms with constant coefficients, yieldingwhich is of fifth order ().
-
Step 2: Find the undetermined coefficients. Compute and use (4) to remove , etc. This produces an expression with 176 terms (not shown). Next, compute (43) usingand G from (47) yielding 193 terms (not shown). Then, , which has 138 terms, must vanish identically on the jet space yielding a linear system of 16 equations for the 9 non-zero coefficients , through , and :For brevity we showed only a couple of the shortest equations (coming from and , respectively) and two of the longest equations (coming from and , respectively). The 18 coefficients through , through , and through are all zero. Solving the system yields
7. Recursion Operator
To prove that there are infinitely many higher-order symmetries we will compute the recursion operator which generates those symmetries sequentially starting from the lowest order symmetry in (44).
As expected, the recursion operator for the Gardner equation is a combination of the well-known recursion operators for the KdV and mKdV equations ([49,50], p. 312),
where denotes the anti-derivative (or integral) operator. connects the symmetries sequentially (without gaps in the simplest cases)
For example,
which is , and
which is . One can use computer algebra to verify that is a hereditary operator [15].
If is a recursion operator for (4), then the Lie derivative [27,49,66,67] of is zero, yielding
where and ∘ denote the commutator and composition of operators, respectively. is the Fréchet derivative operator defined as
where n is the order of F in (4). is the Fréchet derivative of in the direction of F. For recursion operators of the form
where T is the total number of terms in , and and are the orders of U and V, respectively, one has
With regard to (52), is a linear integro-differential operator [57,58] which naturally splits into two pieces [9,11,67],
where is a local differential operator and is a non-local integral operator. is a linear combination of monomials involving , u, and parameters with weight (if applicable) so that each monomial has the correct rank. Also, note that will always be “propagated” to the right in . For example,
Based on the theory of recursion operators, is a linear combination with constant coefficients of terms of the form
where is a symmetry and is a cosymmetry (Euler operator applied to a density , selected such that has the correct rank [12,67]. To standardize the form of , one propagates to the left. For example, . The local and non-local operators are then added to obtain a candidate recursion operator.
We will now show how (52) is computed. Since the ranks and (as well as and ) differ by 2, must have rank 2. Based on (20), and one can readily verify that all the terms in (52) have rank 2.
Step 1: Compute the candidate recursion operator. Using (20), list all monomials in , and of rank 2 or less, i.e., , , , where the trivial terms and have been removed. Apply the correct number of x-derivatives to the monomials in each of the two sublists to assure that each term has rank 2. No action is needed on first sublist. The elements in the second sublist need a single derivative, yielding . After stripping off numerical factors and removing duplicates, linearly combine the resulting monomials with constant coefficients to get a candidate local operator
Using symmetry and densities and (all of low rank), compute and . Then, with terms of type (62) make the candidate non-local operator
so that each term has rank 2. Add both pieces to get the candidate recursion operator
Step 2: Compute the undetermined coefficients. Separately compute all the pieces in (56), beginning with
which can also be computed using (59). With F given in (48), insert
into (66), expand and simplify. This yields an expression of 25 terms (not shown). Some of the terms have and ; others involve , , , , and . Next, using (57) compute
With (65) and (68), then compute
using, for example,
to consistently move the operator from the left to the right. To be able to match the integral terms in (66) (listed below (67)), repeated integration by parts is needed [9]. For example,
converts the integral into by moving the operator under the operator from the right to the left. After integration by parts, has 53 terms (not shown). Next, compute
To move the operator to the right, use, for example,
and similar formulas (expressed in a more general form in [9]). The expanded expression for has 68 terms. Substitute the simplified expressions for (66), (69), and (72) into (56) and require that the resulting expression (which has 36 terms) vanishes identically, i.e., all monomials in , , ⋯, , , …, should be treated as independent. This will yield and a linear system,
involving the remaining nonzero constants. Solve the system to get
8. Lax Pair
Another way to prove the complete integrability of a nonlinear PDE of type (4) is to construct a Lax pair consisting of two linear PDEs in an auxiliary function whose compatibility requires that the original PDE is satisfied.
There are two flavors of Lax pairs. One is an operator formulation where the Lax pair consists of a pair of differential operators which leads to a higher order linear equation involving an auxiliary function. Alternatively, in the matrix formulation the Lax pair is a set of two matrices satisfying a system of equations of first order in x and t, respectively. Only Lax pairs in operator form will be covered in this section. The reader is referred to the literature [1,3,33] for the matrix formalism (also called the zero curvature representation).
Finding a Lax pair in operator form is a nontrivial task and requires an educated guess about the order of the differential operators. But once the order is selected, one can take advantage of the scaling symmetry of the given PDE to construct a candidate for each operator assuming they inherit that scaling symmetry. Here again, the defining equation for a Lax pair is evaluated on solutions of the given PDE which motivates that assumption.
Using the KdV equation as prime example, Lax [40] showed that a completely integrable nonlinear PDE has an associated system of linear PDEs involving a pair of linear differential operators and an auxiliary function ,
where and are expressed in powers of with coefficients depending on , etc., and is an eigenfunction of corresponding to eigenvalue . To guarantee complete integrability of (4) a non-trivial Lax pair should exist and the eigenvalue should not change in time which makes the problem isospectral.
We will show below that a one parameter family of Lax pairs of (1) is given by
where is any real or complex number (not necessarily small). Substituting and into (77) yields
The first equation is a Schrödinger-type equation for the arbitrary eigenfunction with eigenvalue and potential . The second equation describes the time evolution of the eigenfunction.
A lengthy computation shows that the compatibility condition for (80)-(81) can be written as
where (80) and (81) were used repeatedly to eliminate , , , , , and in that order. From (82) it is clear that (80) and (81) will only be compatible on solutions of (1).
The compatibility of the equations in (77) may be expressed directly in terms of the operators and as follows
where
With (77) one has
For a non-trivial Lax pair for (4) to exist, (85) should vanish only on solutions of (4). Rearranging the terms yields
or, expressed in operator form by suppressing the ,
where means that equality holds only on solutions of the original PDE (4). As before, is the commutator of the operators and is the zero operator. Equation (87) is called the Lax equation. We now show how the Lax pair can be computed.
Step 1: Construct a candidate for and . Since the KdV and mKdV equations are special cases of (1) it makes sense to search for of rank 2 and of rank 3. To construct , list all monomials in , and of rank 2 or less, i.e., , , , , , , , where the trivial terms and have been removed. As explained in Section 7, apply to the elements in the second sublist and use the idea in (61) to propagate to the right, yielding . After removing duplicates, linearly combine the monomials from both sublists with constant coefficients to get a candidate for :
where the coefficient of has been set to one (for normalization).
To make a candidate for , list all monomials in , and of rank 3 or less, i.e., , , , , , , , , , , , , , , , , , where the trivial terms , , and have been removed. Apply to the elements in the second sublist, yielding , , , , , , , . Apply to the elements in the third sublist and again use (61) to get , , , . After stripping off numerical factors and removing duplicates, linearly combine the resulting monomials with constant coefficients to get a candidate for :
Step 2: Compute the undetermined coefficients. First, compute
which, after substituting F from (48) to replace and , yields 14 terms. Next, compute
which upon expansion has 125 terms, and
which after expansion has 126 terms.
Substitute (90), (91), and (92) into (87). The resulting expression (with 105 terms) should be identically equal to zero for any function . Set the coefficients of and equal to zero and then set the coefficients of all monomials in u and its x-derivatives separately equal to zero. This yields a nonlinear system of 24 equations for the undetermined coefficients:
For brevity we showed only a couple of the shortest equations (coming from and respectively) and two of the longest equations (coming from and , respectively). Since each equation has a mixture of linear and quasi-linear terms several solution branches occur. Mathematica’s Solve function returns five non-trivial solutions. Three of these solutions lead to Lax pairs of lower order or degenerate Lax pairs which will not be discussed. Instead, we focus on the two solutions that lead to Lax pairs that are useful in, e.g., the application of the Inverse Scattering Transform (IST) and the Riemann-Hilbert methods to solve the Gardner equation. They have coefficients
where and are arbitrary constants. To be able to obtain the Lax pair for the KdV equation where , one should require that and otherwise , , and would become infinite. Notice that both requirements allow one to clear from all denominators. Furthermore, the coefficients then simplify into
9. Bilinear Form
In this section we show how the Gardner equation (1) can be transformed into the mKdV equation (3) and how that helps with deriving Hirota’s bilinear representation [34] and, eventually, solitary wave and soliton solutions of (1). The existence of multi-soliton solutions (i.e., soliton solutions of any order) is yet another proof that the Gardner equation is completely integrable.
A simple shift of u allows one to remove the quadratic term . Indeed, set to replace (1) by
which is still in the original independent variables x and t. As will be shown below, the linear term in can also be removed by a change of independent variables.
Step 1: Construct a bilinear form as follows: First integrate (99) with respect to x,
setting the integration “constant” equal to zero. As with the mKdV equation [28], substitute the Hirota transformation1
into (100), clear the factor and regroup the terms, yielding
Next, set the factors multiplying and separately equal to zero, to get
Based on the scaling symmetry of (1) with weights (20) and the structure of the bilinear form of the mKdV equation [28], recast the above equations in bilinear form,
with undetermined coefficients and . Notice that with , all terms in (103) and (105) have weights three, whereas the terms in (104) and (106) have weights two.
The bilinear operators and (not to be confused with total derivatives used in earlier sections) are defined as
which are Leibniz rule for x-derivatives (and t-derivatives, respectively) of products of functions with every other sign flipped. Explicitly,
Step 2: Compute the undetermined coefficients. Equate (105) and (109) and treat all monomials in f and g and their derivatives as independent to get and Do the same with (106) and (110) to get . Finally, substitute the constants into (105) and (106) and clear common factors, to get a bilinear representation of (99):
which, in light of (101), will only lead to real solutions for the focusing Gardner equation .
The above bilinear formulation is expressed in the original variables x and t. Of course, the term in (111) can be removed at the cost of introducing a new variable X. Indeed, using the chain rule for differentiation, one can readily verify that the Lorentz transformation where
takes (1) into
with bilinear representation [28]
10. Gardner Transformation
In this section we discuss a slight generalization of the Miura transformation [42], sometimes called the Gardner transformation or Gardner transform [4,16,43,46],
which connects solutions of the Gardner equation,
with , to solutions of the KdV equation,
with arbitrary coefficient . The use of will avoid confusion with in (120) and, more importantly, allow us to set to get the standard Miura transformation (see Section 12).
Substituting (119) into (121), it is straightforward to verify that
where means that the left hand side is evaluated on solutions of (120). As before, is the identity operator and is the total derivative operator defined in (25). Clearly, the Gardner transformation will only be real for the defocusing Gardner equation.
We will show how (119) can be computed using the scaling symmetries of the KdV and Gardner equations discussed in Section 4. Recall that , , and . Therefore, (119) is uniform in rank of rank two.
Step 1: Construct a candidate for the Gardner transformation. Make the list , of monomials in v and of rank 2 or less. By differentiating its elements, replace the second sublist by . Linearly combine the resulting elements with undetermined coefficients,
to generate a candidate for the Gardner transformation.
Step 2: Compute the undetermined coefficients. Substitute (123) into (121) and, using (120), replace and . The resulting expression must vanish on the jet space leading to and half a dozen more complicated equations. For , (123) would become an algebraic transformation. Hence, and, after simplification of the more complicated equations, one is left with the following nonlinear system
Of course, the uniformity-in-rank argument also applies to (122) and therefore can be used to derive that equation. Observe that the ranks of the left and right hand sides of (122) match. Since the terms of the KdV (left) and Gardner equation (right) have ranks five and four, respectively, the operator that connects them must have rank one. So, only , , and can occur in the operator. Apply the candidate for the operator,
to (120) and equate the resulting expression to (121) after substitution of (119) but without evaluation on solutions of (120). Solve the resulting nonlinear system,
to get , , and . Substitute the solution into (125) to get (122).
Using (119), some solutions for the KdV equation could be obtained from those of the Gardner equation. For , (119) reduces to the Miura transformation allowing one to generate solutions of the KdV equation from those of the mKdV equation. Although this is worthy of an investigation, it is beyond the scope of this article. For an in-depth discussion of connections between the KdV, mKdV, and Gardner equations and additional applications of the Gardner and Miura transformations we refer to [4] and [46].
11. The Korteweg-de Vries Equation
Since the KdV equation is a special case of the Gardner equation, its conservation laws, higher-order symmetries, and recursion operator immediately follow from those of (1) by setting in (26)-(28), (44)-(46), and (52), respectively. The conservation laws for the KdV equation have been known since the 1970s [38,44] and played an important role in the development of the concept of complete integrability. Its symmetries and recursion operator have been studied in, e.g., [50].
The bilinear form for the KdV equation is much simpler than the one for the mKdV equation and so are its soliton solutions. The interested reader is referred to [1,14,28,34] for the bilinear formulation and explicit formulas for the two-, three-, and N-soliton solutions.
For completeness we only include the solitary wave and cnoidal wave solutions which were first derived in [37],
where is the modulus of the Jacobi elliptic cosine () function. Both solutions are depicted in Figure 1. When m approaches 1, the peaks of the -squared solution get a bit taller, the valleys become lower and flatter before they spread out horizontally to become the -squared solution. Both solutions (128) and (129) satisfy for all t. The more general expressions corresponding to a nonzero boundary condition can be found in, e.g., [1,3,26].
12. The Modified Korteweg-de Vries Equation
Without extra work, we have the first three conservation laws [44] and higher-order symmetries [50] for the mKdV equation by setting in (26)-(28) and (44)-(46), respectively. The recursion operator [50] connecting those symmetries follows from (52) with .
Likewise, a one parameter Lax pair for the mKdV equation follows from (78)-(79) by setting :
which for simplify into
To our knowledge, this Lax pair first appeared in [64,65]. A further discussion of other Lax pairs for the mKdV equation can be found in [13,33]. In the latter paper a more comprehensive algorithm to compute Lax pairs in operator form is presented with the mKdV equation among its examples.
The Miura transformation [42,43,44],
which connects solutions of (3) (with dependent variable ) to solutions of (121) readily follows from (119) by setting . Likewise, (122) reduces to
We now turn our attention to solitary wave and soliton solutions of the mKdV equation. The nature of the solutions of (113) depends on the sign of . Two cases have to be considered.
Case I: The focusing mKdV equation ().
The mKdV equation (113) has solutions involving a cosh-function,
with , where the boundary value , wave number k, and phase are arbitrary constants. The solution2 satisfying has been computed with Hirota’s method in [2] where only the case was considered. Solution (136) is also valid for with a caveat (see below). For the solution reduces to the well-known -solution,
where the ± sign is due to the invariance of (113) under the discrete symmetry .
The soliton solutions of the focusing mKdV equation have been known for a long time and can be computed with a variety of methods. Adhering to Hirota’s method [28,34], the one-soliton solution readily follows from substitution of
into (115) yielding and (116) which is identically satisfied. From (117) one then obtains
where , which matches (137). The two-soliton solution follows [28] from
with and . Then, from (117)
Details of the derivation are given in citehirota-book-2004 and [28] where also formulas for the three- and N-soliton solutions can be found.
Case II: The defocusing mKdV equation ().
The defocusing mKdV equation was solved in [51] with the Zakharov-Shabat method. Solution (136) with X replaced by corresponds to the case in [51]. Notice that when , solution (136) will only exist if This will be discussed in greater detail in the next section.
A new exact two-soliton solution of (113) with is presented in [45]:
with and with and arbitrary real parameters. This solution is obtained as the limit for the modulus going to one of a dark breather solution (involving Jacobi elliptic functions and elliptic integrals) of the defocusing mKdV equation.
13. Solitary Wave and Periodic Solutions
As pointed out in [36], the fact that (1) is invariant under the transformation
makes it possible to have solutions of different polarity for that equation, most notably, “bright” as well as “dark” solitons, depending on the initial conditions. In this section we only cover a subset of the many types of solutions (1) admits.
Depending on the sign of in (1), it is straightforward [68] to find kink- and hump-type solitary waves solutions as well as periodic solutions in terms of the Jacobi elliptic sine and cosine functions. Indeed, using our symbolic code [10] for the tanh, , and Jacobi elliptic function methods, at a click-of-the-button one gets simple exact solutions which we cover first.
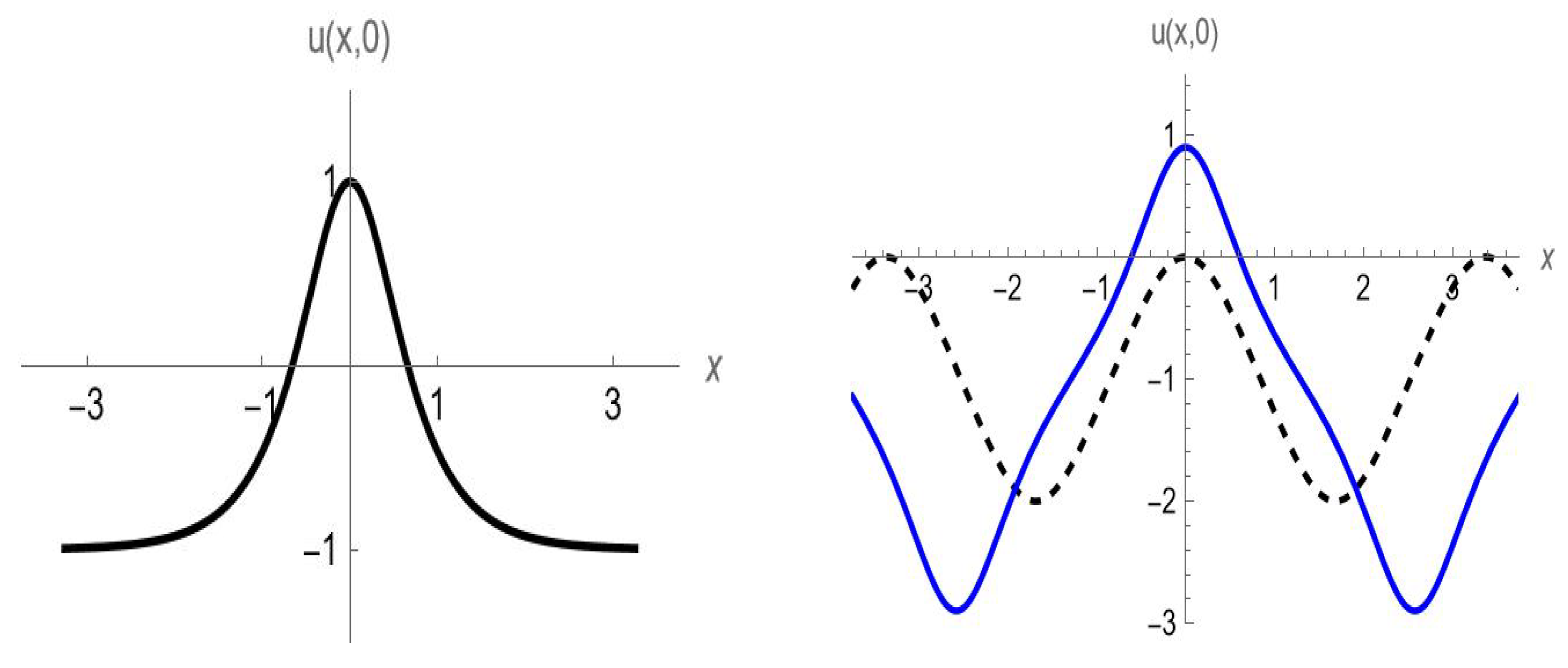
Case I: The focusing Gardner equation .
The most well-known solutions are
with , and
with . Both solutions for the minus sign (in front of the square root) are shown in Figure 2. Observe that as the value of m gets closer to 1, the -function starts taking the shape of a -profile.
Of course, (144) also follows directly from (137) upon application of the transformation (112). Using (136) in the same way yields
with and where is arbitrary. Setting , yields
with , where denotes the speed of the wave. This special solution is frequently used in the literature [4,22,23,52,60,68] and could also be computed via a Darboux transformation (see, e.g., [60]). For , (147) is valid for all values of V and since the wave is travelling to the right.
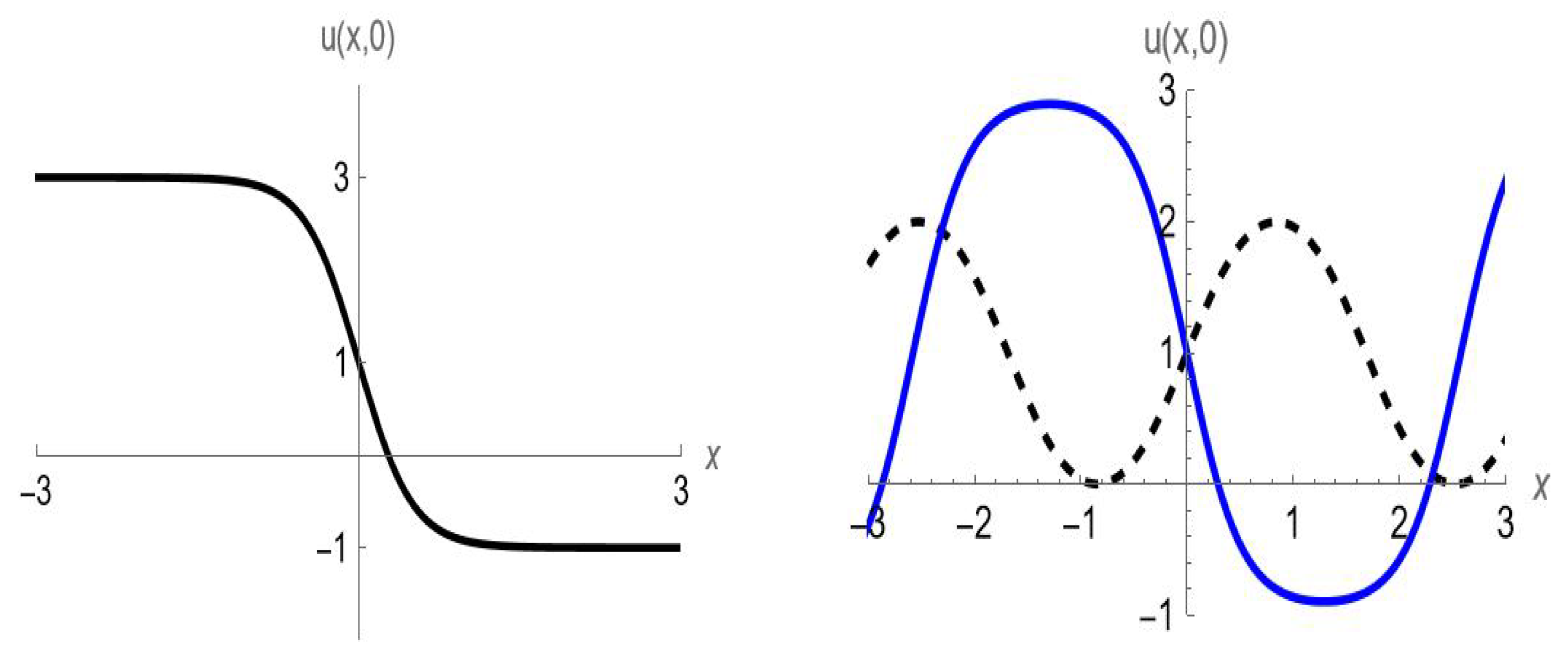
Case II: The defocusing Gardner equation ().
The simplest exact solutions are
with , and
with . In each of these solutions is an arbitrary constant phase. The shock wave solution (148) and periodic solution (149) can already be found in, e.g., [51]. Both solutions for the minus sign (in front of the square root) are shown in Figure 3. As the value of m gets closer to 1, the -function starts taking the shape of a -profile.
With respect to (147) where , note that (when ) the argument of the square root, , will be zero when . Thus, (147) is only valid when the speed is below that critical value (). Thus, when dealing with the defocusing Gardner equation, if there is no solution of type (147). Turning the argument around, solutions (147) of large amplitude (which is proportional to ) or fast traveling waves (since ) can only occur if is relatively small in comparison with . For example, for , one must require that .
As the value of k increases the solitary wave get taller and narrower. At and values of k very close to 1 the waves become flat at the top, hence, the name table-top (or flat-top) waves. For the critical value , the wave degenerates into a horizontal line corresponding to
For values of k near 1, solution (150) can be very well approximated by a kink-antikink pair [52],
where serves as a measure for the width of the table-top wave. These kink and anti-kink solutions, which correspond to the left and right flanks of the table-top solutions, are clearly visible in Figure 4 where k approaches 1. Although the expressions do not match analytically, Figure 5 shows that the graphs of (150) and (152) for nearly overlap even when k is not even close to 1.
Parenthetically, Grosse [24] computed a two-soliton solution of the defocusing mKdV equation. His analytic solution supposedly describes the interaction of two kink-solutions. It does not satisfy the equation exactly but appears to be an excellent approximation to a solution and therefore warrants further investigation.
Notice that all the above solutions follow the scaling homogeneity (21). Functions like , tanh, , etc., have no weights. With regard to the weights (20), as it should because Furthermore, because and . All terms in any must have weight zero, in particular, . Also , where m is the modulus of any of the Jacobi elliptic functions. From it follows that and , where is the angular frequency in . Hence, if and V are polynomials in k, then can only have terms proportional to and and V can only have terms in , and . The proportionality factors could have any powers of since .
14. Soliton Solutions
When considering solitons we again must make the distinction between the focusing and defocusing Gardner equations.
Case I: The focusing Gardner equation ().
Using (112), solutions of the focusing version of (1) are given by
where is any soliton solution of the focusing mKdV equation and and . For example, the two-soliton solution of (1) reads
where and . The elastic scattering of two solitons for the focusing Gardner equation is shown in Figure 6 and Figure 7, which are the 2D and 3D graphs of (154) for with , , and .
Case II: The defocusing Gardner equation ().
15. Symbolic Software
Using the concept of scaling homogeneity we have been able to create powerful algorithms to investigate the complete integrability of systems of polynomial nonlinear PDEs. In this section we give a brief summary of the available codes.
Our Mathematica code PainleveTest.m [5] automates the Painlevé test which allows one to verify if a nonlinear PDE has the Painlevé property [8] as discussed in Section 3.
The Mathematica code InvariantsSymmetries.m [18] computes polynomial conserved densities and higher-order symmetries of nonlinear -dimensional PDEs that can be written as a polynomial system of evolution equations. If a PDE has arbitrary parameters the code allows one to derive conditions on these parameters so that the PDE admits conserved quantities or generalized symmetries. An example of such a “classification” problem is given in [19]. A discussion of the scope and limitations of the code can be found in [19,20].
To cover conservation laws of nonlinear PDEs in more than one space variable [25,54,55], we developed ConservationLawsMD.m [53], a Mathematica package to compute polynomial conservation laws of polynomial systems of nonlinear PDEs in space variables and time t.
In [9], the authors show details of the algorithm to compute recursion operators for systems of nonlinear PDEs of type (4), including formulas for handling integro-differential operators used in Section 7. The Mathematica package PDERecursionOperator.m [7] performs the symbolic computation of recursion operators of systems of polynomial nonlinear evolution equations.
In Appendix B of [39], Larue presents LaxpairTester.m, a Mathematica code to verify Lax pairs in operator and matrix form. In [33], an algorithm is presented to compute Lax pairs in operator form but that algorithm has not been implemented yet.
In addition, we developed the Mathematica package PDESpecialSolutions.m [6] to compute solitary wave solutions based on the tanh-method and generalizations for the , , and functions [10].
Recently, we added the Mathematica code PDESolitonSolutions.m [21] to compute soliton solutions of polynomial PDEs based on a simplified version of Hirota’s method described in [28].
Since our codes only use tools from calculus, linear algebra, the calculus of variations, and differential geometry these algorithms are fairly straightforward to implement in the syntax of computer algebra systems such as Mathematica, Maple, and REDUCE. Our software is open source and in the public domain. All our Mathematica packages and notebooks are available on the Internet at https://people.mines.edu/whereman/.
16. Conclusions and Future Work
The approach described in this paper and related software is applicable to large classes of nonlinear PDEs which can be expressed as polynomial systems of evolution equations. As a prototypical example, we gave a detailed integrability analysis of the Gardner equation by computing its densities (and fluxes), higher-order symmetries, recursion operator, Lax pair, Hirota’s bilinear representation, and soliton solutions. The corresponding results for the KdV and mKdV equations were obtained by setting the coefficient of the cubic and quadratic term equal to zero, respectively.
We also showed how to compute the Gardner (Miura, resp.) transformation which connects solutions of the Gardner (mKdV, resp.) equation to those of the KdV equation. With the Gardner transformation, some solutions of the KdV equation could be obtained from those of the Gardner equation shown in this paper. Likewise, applying the Miura transformation to solutions of the mKdV equation will lead to solutions of the KdV equation. When new solutions of the Gardner and mKdV equations are discovered, it would be worthwhile to investigate which solutions of the KdV equation they correspond to and, more importantly, if new solutions of the KdV equation could be computed that way.
The crux of our computational strategy is a skillful use of the dilation symmetry of the PDE and relies on the observation that the defining equations for conservation laws, generalized symmetries, recursion operator, Lax pair, bilinear representation, and Gardner transformation, should only hold on solutions of the given PDE. Consequently, the quantities (or operators) one computes inherit the scaling symmetry of the given PDE.
Since their defining equations are similar, it would also be possible to use this approach to compute symplectic and Hamiltonian (co-symplectic) operators of PDEs. In doing so, it would be possible to verify whether or not a PDE has a bi-Hamiltonian (or tri-Hamiltonian) structure, which is yet another criterion for its complete integrability. Further exploration of this idea as well as the design of algorithms and codes for the computation of symplectic and Hamiltonian operators is left for future work.
The algorithms used in this paper are coded in Mathematica syntax but can be adapted for major computer algebra systems such as Maple and REDUCE.
Author Contributions
Both authors contributed equally to this work. Both authors have read and agreed to the published version of the manuscript.
Funding
The material presented in this paper is based in part upon research supported by the National Science Foundation (NSF) of the United States of America under Grants Nos. CCR-9300978, CCR-9625421, CCR-9901929, and CCF-0830783. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of NSF.
Data Availability Statement
Our software is open source and in the public domain. All our Mathematica packages and notebooks are available on the Internet at https://people.mines.edu/whereman/.
Acknowledgments
The authors are grateful to Prof. F. Verheest (Sterrenkundig Observatorium, University Gent, Belgium) for valuable discussions on the use of the Gardner equation in plasma physics.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ablowitz, M. J., Clarkson, P. A. Solitons, Nonlinear Evolution Equations and Inverse Scattering. Lond. Math. Soc. Lect. Note Ser., vol. 149. Cambridge Univ. Press, Cambridge, U.K. (1991).
- Ablowitz, M. J., Satsuma, J. Solitons and rational solutions of nonlinear evolution equations. J. Math. Phys. 19(10), 2180-2186 (1978).
- Ablowitz, M. J., Segur, H. Solitons and The Inverse Scattering. SIAM Studies in Applied Mathematics 4, SIAM, Philadelphia, U.S.A. (1981).
- Alejo, M. A. et al. The Gardner equation and the L2-stability of the N-soliton solution of the Korteweg–de Vries equation. Trans. Amer. Math. Soc. 365(1), 195-212 (2012).
- Baldwin, D., Hereman, W. PainleveTest.m: A Mathematica package for the Painlevé test of systems of nonlinear ordinary and partial differential equations. Dept. Appl. Math. Stat., Colorado School of Mines, Golden, Colorado, U.S.A. (2001). https://people.mines.edu/whereman.
- Baldwin, D., Hereman, W. PDESpecialSolutions.m: A Mathematica package for the symbolic computation of exact solutions expressible in hyperbolic and elliptic functions for systems of nonlinear partial differential equations. Dept. Appl. Math. Stat., Colorado School of Mines, Golden, Colorado, U.S.A. (2003). https://people.mines.edu/whereman.
- Baldwin, D., Hereman, W. PDERecursionOperator.m: A Mathematica package for the symbolic computation of recursion operators for nonlinear partial differential equations. Dept. Appl. Math. Stat., Colorado School of Mines, Golden, Colorado, U.S.A (2003). https://people.mines.edu/whereman.
- Baldwin, D., Hereman, W. Symbolic software for the Painlevé test of nonlinear ordinary and partial differential equations. J. Nonl. Math. Phys. 13(1), 90-110 (2006).
- Baldwin, D., Hereman, W. A symbolic algorithm for computing recursion operators of nonlinear partial differential equations. Int. J. Computer Math. 87(5), 1094-1119 (2010).
- Baldwin, D. et al. Symbolic computation of exact solutions expressible in hyperbolic and elliptic functions for nonlinear PDEs. J. Sym. Comput. 37(6), 669-705 (2004).
- Baldwin, D. et al. Symbolic algorithms for the Painlevé test, special solutions, and recursion operators for nonlinear PDEs. In: Group Theory and Numerical Analysis, Eds.: P. Winternitz et al., CRM Proc. & Lect. Ser. vol. 39, AMS, Providence, RI, U.S.A., 2005, pp. 17-32.
- Bilge, A. H. On the equivalence of linearization and formal symmetries as integrability tests for evolution equations. J. Phys. A: Math. Gen. 26(24), 7511-7519 (1973).
- Burde, G. I. Lax pairs for the modified KdV equation. Axioms 13, Art. No. 121, 10 pp (2024).
- Drazin, P. G., Johnson, R. S. Solitons: An Introduction. Cambridge Texts Appl. Math., Cambridge Univ. Press, Cambridge, U.K. (1989).
- Fuchssteiner, B. et al. Computer-algebra methods for investigation of hereditary operators of higher order soliton equations. Comput. Phys. Commun. 44(1-2), 47-55 (1987).
- Gardner, C. S. et al. Korteweg-de Vries equation and generalizations. II. Existence of conservation laws and constants of motion. J. Math. Phys. 9(8), 1204-1209 (1968).
- Gardner, C. S. et al. Korteweg-de Vries equation and generalizations. VI. Methods for exact solution. Commun. Pure Appl. Math. 27(1), 97-133 (1974).
- Göktaş, Ü., Hereman, W. InvariantsSymmetries.m: A Mathematica integrability package for the computation of invariants and symmetries of nonlinear systems of partial differential equations and differential-difference equations. Dept. Appl. Math. Stat., Colorado School of Mines, Golden, Colorado, U.S.A. (1997). https://people.mines.edu/whereman. Also available from MathSource (Item: 0208-932, Applications/Mathematics).
- Göktaş, Ü., Hereman, W. Symbolic computation of conserved densities for systems of nonlinear evolution equations. J. Symb. Comp. 24(5), 591-621 (1997).
- Göktaş, Ü., Hereman, W. Algorithmic computation of higher-order symmetries for nonlinear evolution and lattice equations. Adv. Comput. Math. 11(1), 55-80 (1999).
- Göktaş, Ü., Hereman, W.: PDESolitonSolutions.m: A Mathematica package for the symbolic computation of solitary wave and soliton solutions of polynomial nonlinear PDEs using a simplified version of Hirota’s method. Dept. Appl. Math. Stat., Colorado School of Mines, Golden, Colorado, U.S.A. (2023). https://inside.mines.edu/~whereman.
- Grimshaw, R. Nonlinear wave equations for oceanic internal solitary waves. Stud. Appl. Math. 136(2), 214-237 (2015).
- Grimshaw, R. et al. Generation of large-amplitude solitons in the extended Korteweg-de Vries equation. Chaos 12(4), 1070-1076 (2002).
- Grosse H. Solitons of the modified KdV equation. Lett. Math. Phys. 8(4), 313-319 (1984).
- Hereman, W. Symbolic computation of conservation laws of nonlinear partial differential equations in multi-dimensions. Int. J. Quant. Chem. 106(1), 278-299 (2006).
- Hereman, W. Shallow water waves and solitary waves. In: Encyclopedia of Complexity and Systems Science, vol. 11, 10398 pp, Ed.: R. A. Meyers, Springer Verlag, Berlin, Germany, 2009, entry 480, pp. 8112-8125. Updated version in: Solitons – A Volume in the Encyclopedia of Complexity and Systems Science, 2nd edition, Ed.: M. A. Helal, Springer Verlag, New York, U.S.A., 2022, pp. 203-220.
- Hereman, W., Göktaş, Ü. Integrability Tests for Nonlinear Evolution Equations. In: Computer Algebra Systems: A Practical Guide, Ed.: M. Wester, Wiley, New York, U.S.A., 1999, Ch. 12, pp. 211-232.
- Hereman, W., Göktaş, Ü. Symbolic computation of solitary wave solutions and solitons through homogenization of degree. In: Nonlinear and Modern Mathematical Physics, Proc. 6th Int. Workshop on Nonlinear and Modern Mathematical Physics (NMMP2022), Springer Proceedings in Mathematics & Statistics, 459, Eds.: S. Manukure and W.-X. Ma, Springer Verlag, New York, U.S.A., 2024, Ch. 4, pp. 101-164.
- Hereman, W. et al. Algorithmic integrability tests for nonlinear differential and lattice equations. Comp. Phys. Commun. 115(2-3), 428-446 (1998).
- Hereman, W. et al. Continuous and discrete homotopy operators with applications in integrability testing. In: Differential Equations with Symbolic Computation, Eds.: D. Wang and Z. Zheng, Birkhäuser Verlag, Basel, Switzerland, 2005, Ch. 15, pp. 255-290.
- Hereman, W. et al. Continuous and discrete homotopy operators: A theoretical approach made concrete. Math. Comput. Simul. 74(4-5), 352-360 (2007).
- Hereman, W. et al. Direct methods and symbolic software for conservation laws of nonlinear equations. In: Advances in Nonlinear Waves and Symbolic Computation, Ed.: Z. Yan, Nova Science Publishers, New York, U.S.A., 2009, pp. 19-79.
- Hickman, M. et al. Scaling invariant Lax pairs of nonlinear evolution equations. Applicable Analysis 91(2), 381-402 (2012).
- Hirota, R. The Direct Method in Soliton Theory. Cambridge Tracts Math., vol. 155, Cambridge Univ. Press, Cambridge, U.K. (2004).
- Kakutani, T, Yamasaki, N. Solitary waves on a two-Layer fluid. J. Phys. Soc. Jpn. 45(2), 674-679 (1978).
- Kamchatnov, A. M. et al. Undular bore theory for the Gardner equation. Phys. Rev. E 86(3), Art. No. 036605, 23 pp (2012).
- Korteweg, D. J., de Vries, G. XLI. On the change of form of long waves advancing in a rectangular canal, and on a new type of long stationary waves. Philos. Mag. (Ser. 5) 39(240), 422-443 (1895).
- Kruskal, M. D. et al. Korteweg-de Vries equation and generalizations. V. Uniqueness and nonexistence of polynomial conservation laws. J. Math. Phys. 11(3), 952-960 (1970) .
- Larue, J. Symbolic Verification of Operator and Matrix Lax Pairs for Some Completely Integrable Nonlinear Partial Differential Equations. Master Sci. Thesis, Dept. Appl. Math. Stat., Colorado School of Mines, Golden, Colorado, U.S.A. (2011).
- Lax, P. D. Integrals of nonlinear equations of evolution and solitary waves. Commun. Pure Appl. Math. 21(5), 467-490 (1968).
- Miles, J. W. On internal solitary waves. Tellus A: Dyn. Meteor. Ocean. 31(5), 456-462 (1979).
- Miura, R. Korteweg-de Vries equation and generalizations. I. A remarkable explicit nonlinear transformation. J. Math. Phys. 9(8), 1202-1204 (1968).
- Miura, M. R. The Korteweg de Vries equation: a survey of results, SIAM Rev. 18, 412-459 (1976).
- Miura, R. et al. Korteweg-de Vries equation and generalizations. II. Existence of conservation laws and constants of motion. J. Math. Phys. 9(8), 1204–1209 (1968).
- Mucalica, A., Pelinovsky, D. E. Dark breathers on a snoidal wave background in the defocusing mKdV equation. Lett. Math. Phys., under revision (2024); preprint: arXiv:2312.08969v1, Dec. 14, 2023, 26 pp (2023).
- Muñoz, C. The Gardner equation and the stability of multi-kink solutions of the mKdV equation. Discrete Cont. Dyn. Sys. 36(7), 3811-3843 (2016).
- Olivier, C. P., Verheest, F. Overtaking collisions of double layers and solitons: Tripolar structures and dynamical polarity switches. Phys. Plasmas 27, Art. No. 062303, 7 pp (2020).
- Olivier, C. P. et al. A small-amplitude study of solitons near critical plasma compositions. J. Plasma Phys. 82, Art. No. 905820605, 21 pp (2016).
- Olver, P. J. Applications of Lie Groups to Differential Equations. 2nd. ed., Grad. Texts in Math., vol. 107, Springer Verlag, New York, U.S.A. (1993).
- Olver, P. Evolution equations possessing infinitely many symmetries. J. Math. Phys. 18, 1212-1215 (1977).
- Ono, H. Solitons on a background and a shock wave. J. Phys. Soc. Jpn. 40(5), 1487-1497 (1976).
- Pelinovskiĭ, E. N., Slyunyaev, A. V. Generation and interaction of large-amplitude solitons. J. Exper. Theor. Phys. Lett. 67(9), 655-661 (1998).
- Poole, D., Hereman, W. ConservationLawsMD.m: A Mathematica package for the symbolic computation of conservation laws of polynomial systems of nonlinear PDEs in multiple space dimensions. Dept. Appl. Math. Stat., Colorado School of Mines, Golden, Colorado, U.S.A. (2009). https://people.mines.edu/whereman.
- Poole, D., Hereman, W. The homotopy operator method for symbolic integration by parts and inversion of divergences with applications. Applicable Analysis 89(4), 433-455 (2010).
- Poole, D., Hereman, W. Symbolic computation of conservation laws for nonlinear partial differential equations in multiple space dimensions. J. Symb. Comp. 46(12), 1355-1377 (2011).
- Remoissenet, M. Waves Called Solitons: Concepts and Experiments. 3rd. ed., Springer, Berlin, Germany (1999).
- Sanders, J. A., Wang, J. P. Integrable systems and their recursion operators. Nonlinear Anal. 47(8), 5213-5240 (2001).
- Sanders, J. A., Wang, J. P. On recursion operators. Physica D 149(1-2), 1-10 (2001).
- Slyunyaev, A. V. Dynamics of localized waves with large amplitude in a weakly dispersive medium with a quadratic and positive cubic nonlinearity. J. Exper. Theor. Phys. 92(3), 529-534 (2001).
- Slyunyaev, A. V., Pelinovskiĭ, E. N., Dynamics of large-amplitude solitons. J. Exper. Theor. Phys. 89(1), 173-181 (1999).
- Slyunyaev, A. V., Pelinovsky, E. N., Role of multiple soliton interactions in the generation of rogue waves: The modified Korteweg–de Vries framework. Phys. Rev. Lett. 117(21), Art. No. 214501, 5 pp (2016).
- Torvén, S. Modified Korteweg-de Vries equation for propagating double layers in plasmas. Phys. Rev. Lett. 47(15), 1053-1056 (1981),.
- Verheest, F. et al. On the Gardner equation for nonlinear waves in multispecies plasmas. J. Plasma Phys., in preparation (2024).
- Wadati, M. The exact solution of the modified Korteweg-de Vries equation. J. Phys. Soc. Jpn. 32(6), 1681-1681 (1972).
- Wadati, M. The modified Korteweg-de Vries equation. J. Phys. Soc. Jpn. 34(5), 1289-1296 (1973).
- Wang, J. P. Symmetries and conservation laws of evolution equations. Ph.D. Thesis, Thomas Stieltjes Institute for Mathematics, Free University of Amsterdam, Amsterdam, The Netherlands (1998).
- Wang, J. P. A list of (1+1) dimensional integrable equations and their properties. J. Nonl. Math. Phys. 9, 213-233 (2002).
- Wazwaz, A-M. New solitons and kink solutions for the Gardner equation. Commun. Nonl. Sci. Numer. Simulat. 12, 1395-1404 (2007).
- Zakharov, V. E. (ed.) What is Integrability? Springer Series in Nonlinear Dynamics, Springer, Berlin, Germany (1991).
- Zhang, D.-J. et al. Solutions to the modified Korteweg–de Vries equation. Rev. Math. Phys. 26(7), Art. No. 1430006, 42 pp (2014).
| 1 | |
| 2 | To prevent blow-up in finite time we will only consider the plus sign. |
Figure 1.
Graphs of the solitary wave (solid line) and cnoidal wave (dashed line) solutions for and .
Figure 1.
Graphs of the solitary wave (solid line) and cnoidal wave (dashed line) solutions for and .
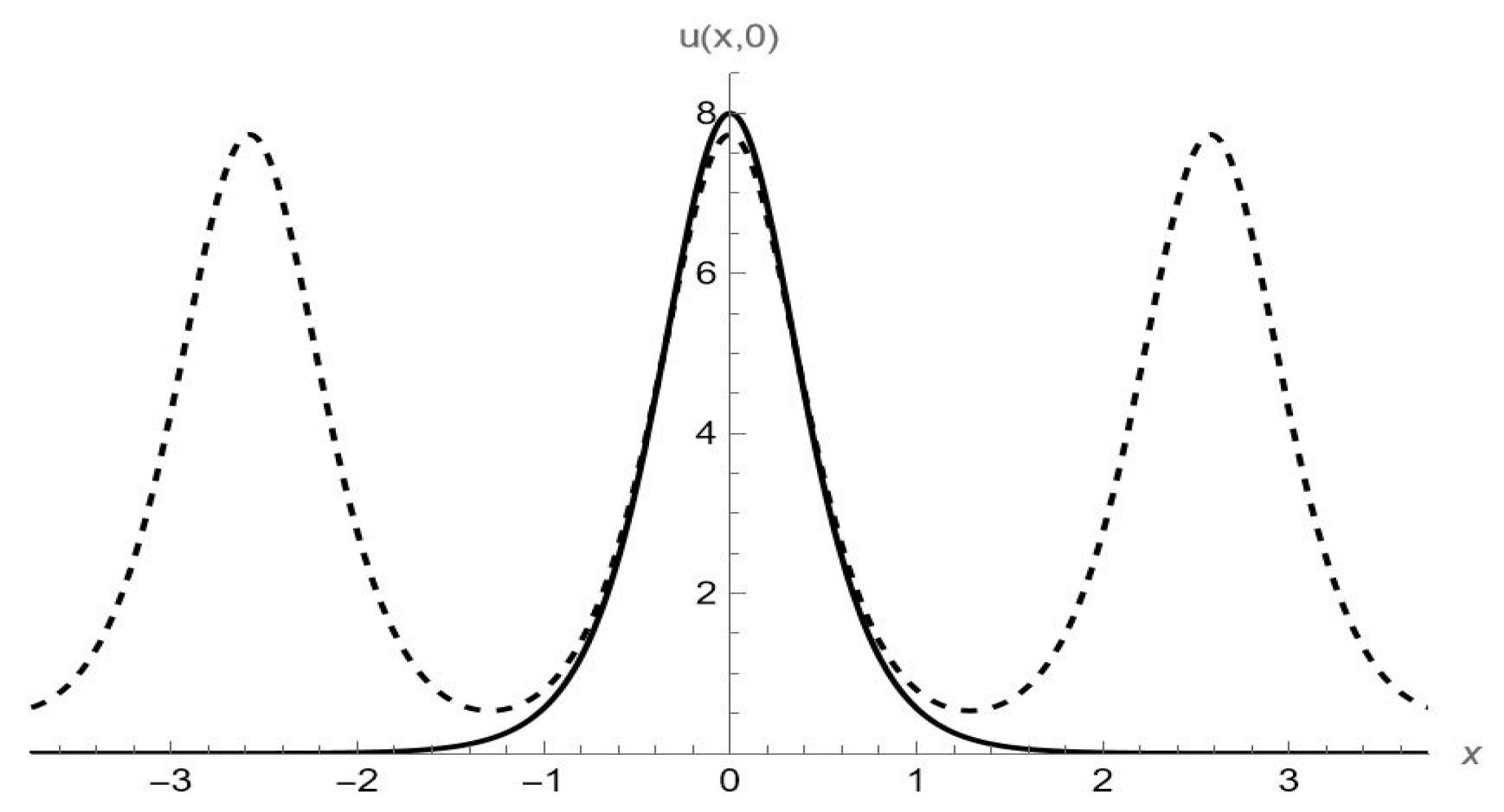
Figure 2.
Graphs of (144) (left) and (145) (right), both for , , , and . The curves on the right correspond to (dashed line) and (solid line).
| x |
Figure 3.
Graphs of (148) (left) and (149) (right), both for , , , and . The curves on the right correspond to (dashed line) and (solid line).
| x |
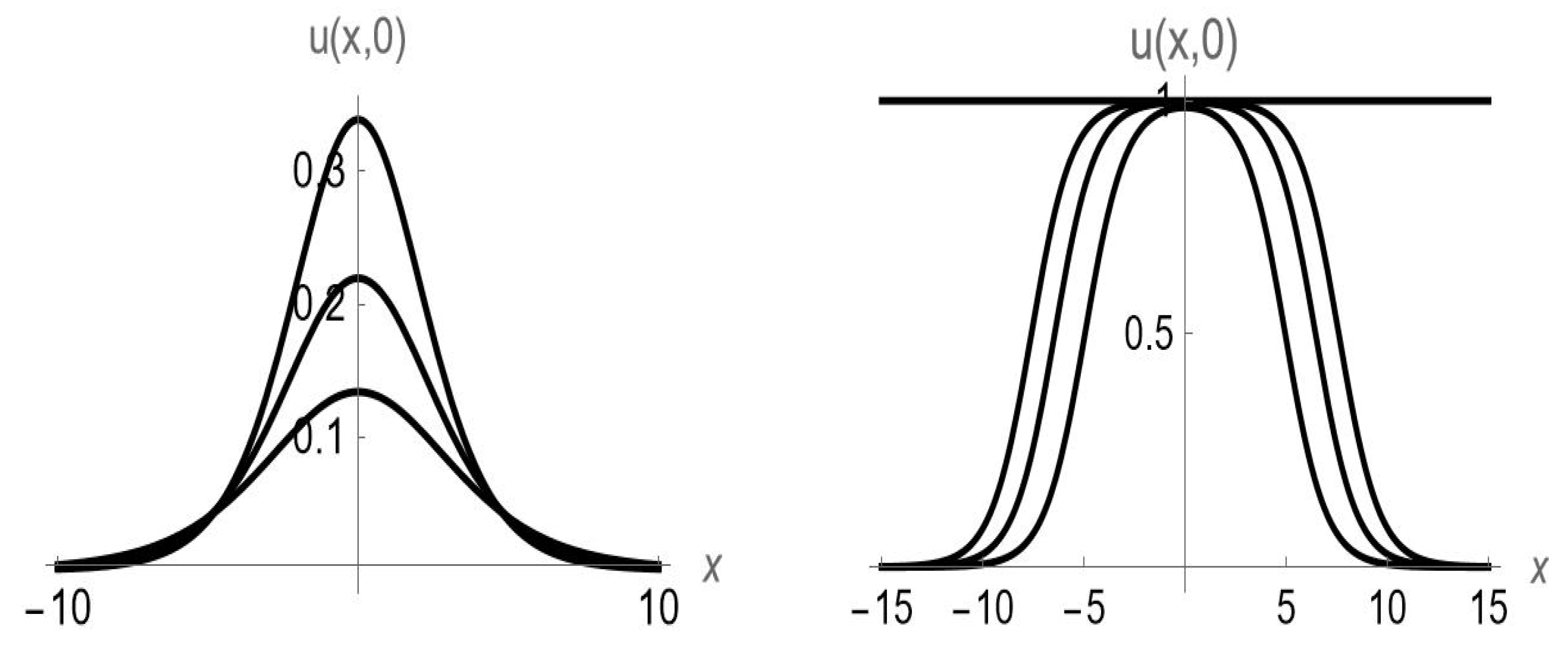
Figure 4.
Graphs of (150) for , , and (left), and , , , and (right).
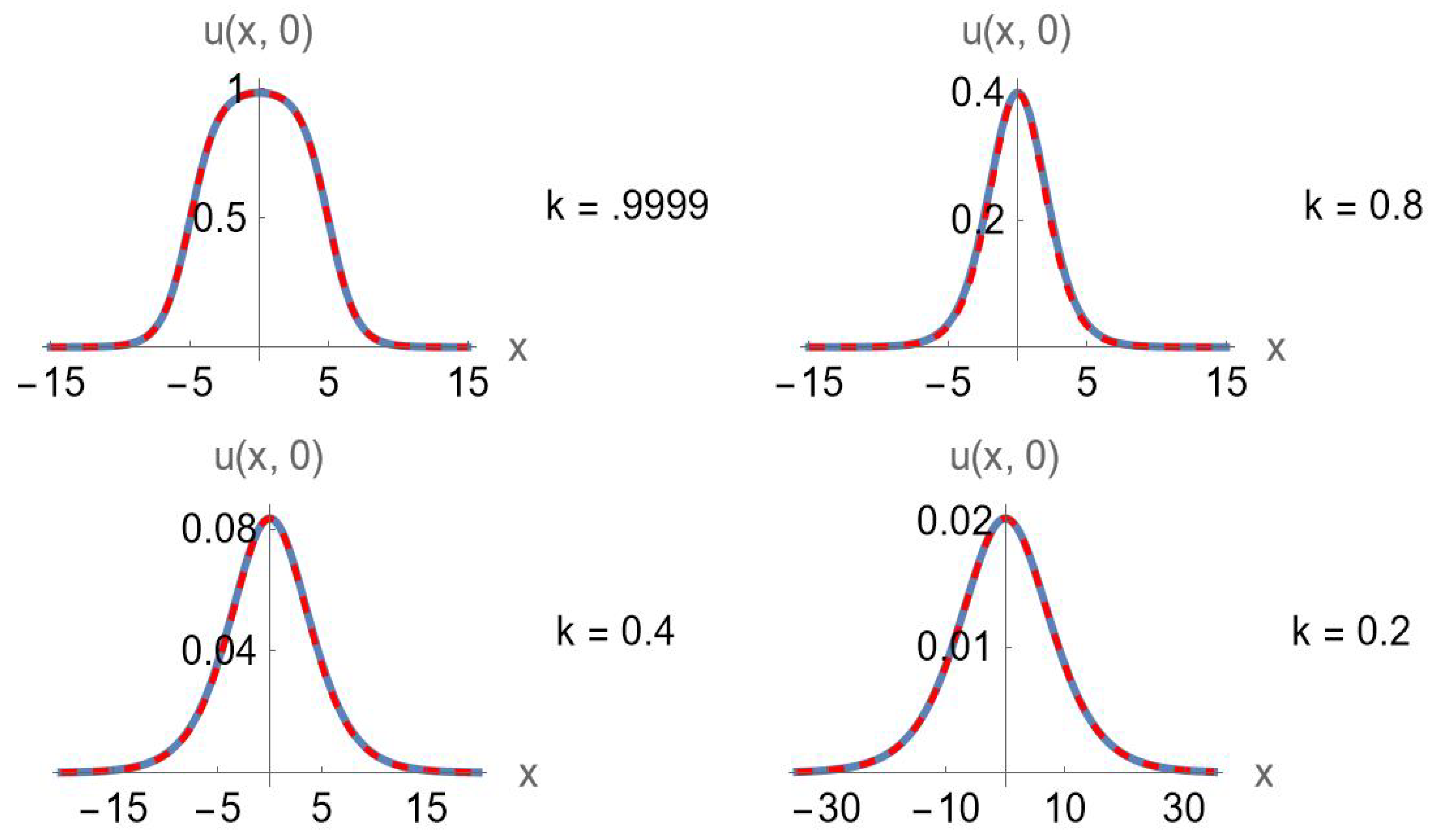
Figure 6.
Graph of the two-soliton solution (154) of the focusing Gardner equation at three different moments in time.
Figure 6.
Graph of the two-soliton solution (154) of the focusing Gardner equation at three different moments in time.
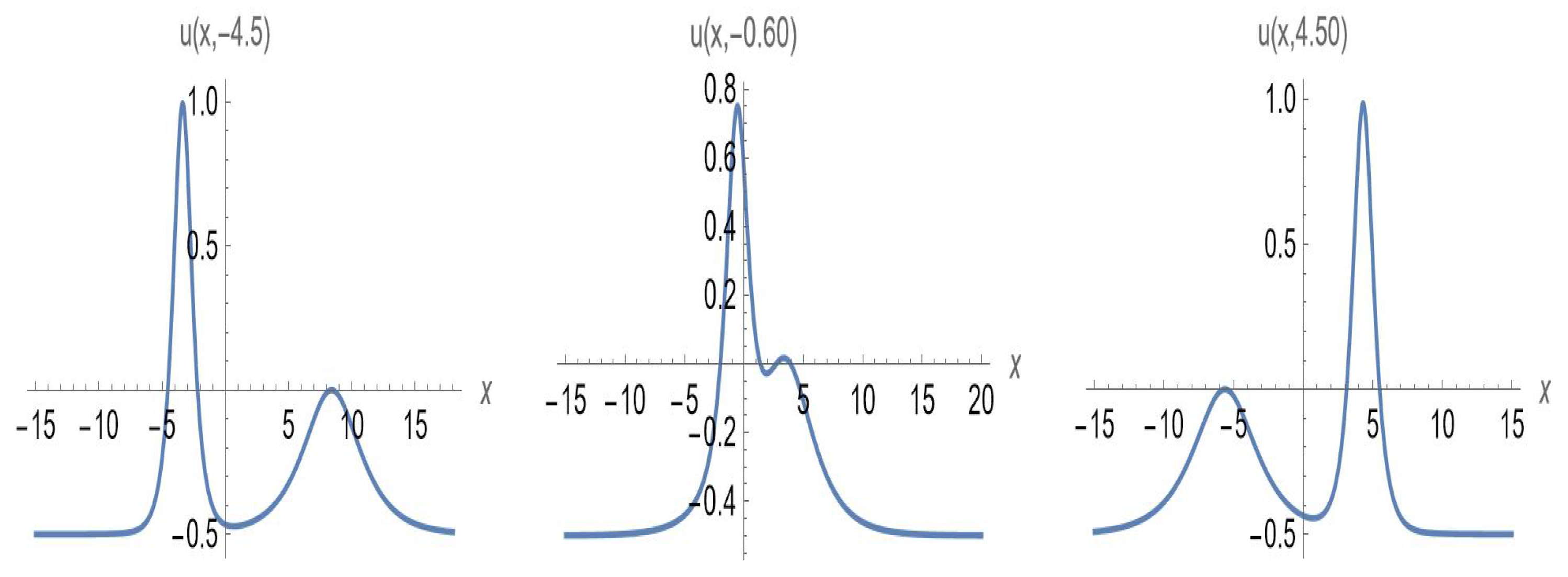
Figure 7.
Bird’s eye view of a two-soliton collision for the focusing Gardner equation. Notice the phase shift after collision: The taller (faster) soliton is shifted forward and the shorter (slower) soliton backward relative to where they would have been if they had not collided.
Figure 7.
Bird’s eye view of a two-soliton collision for the focusing Gardner equation. Notice the phase shift after collision: The taller (faster) soliton is shifted forward and the shorter (slower) soliton backward relative to where they would have been if they had not collided.
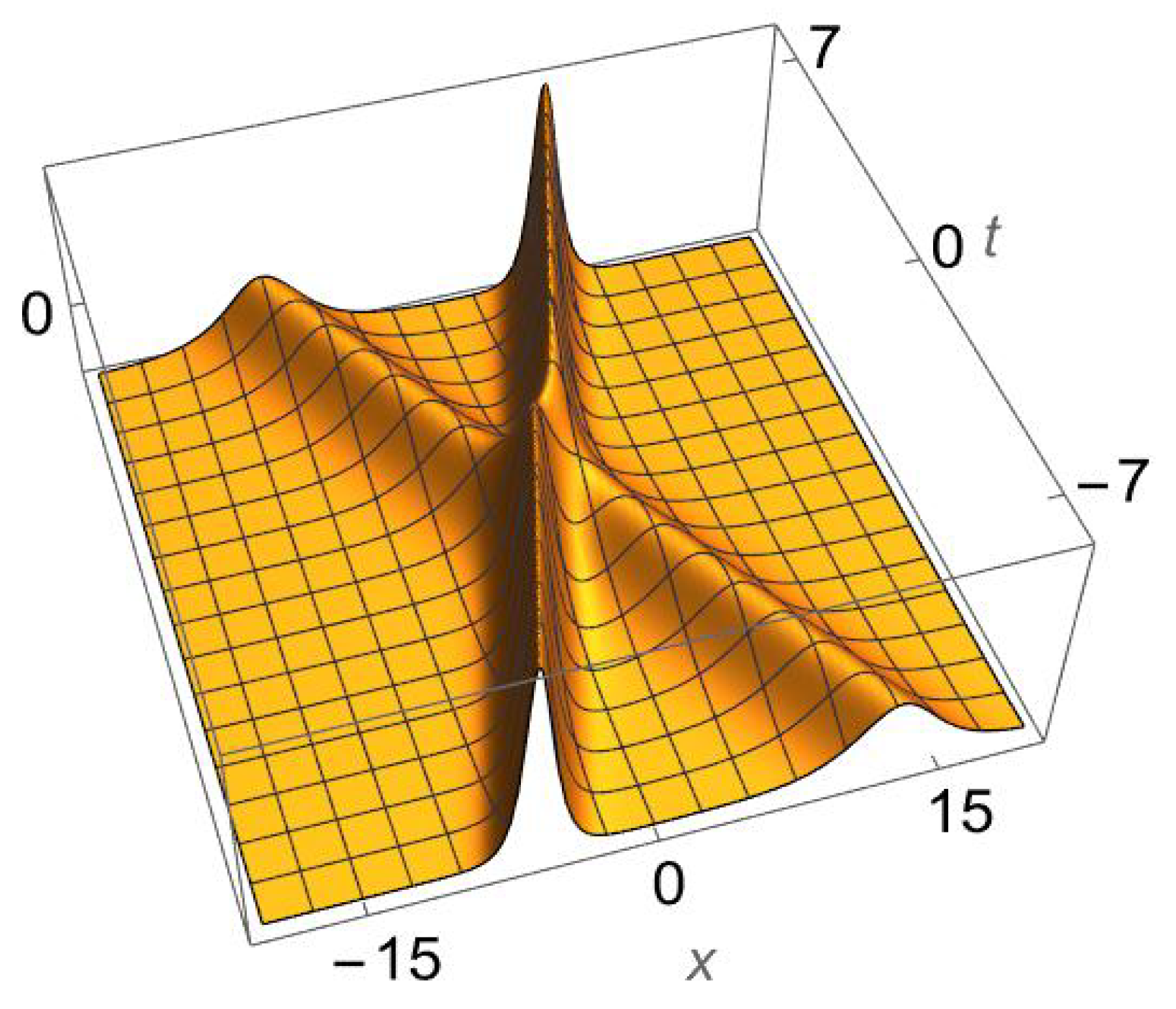
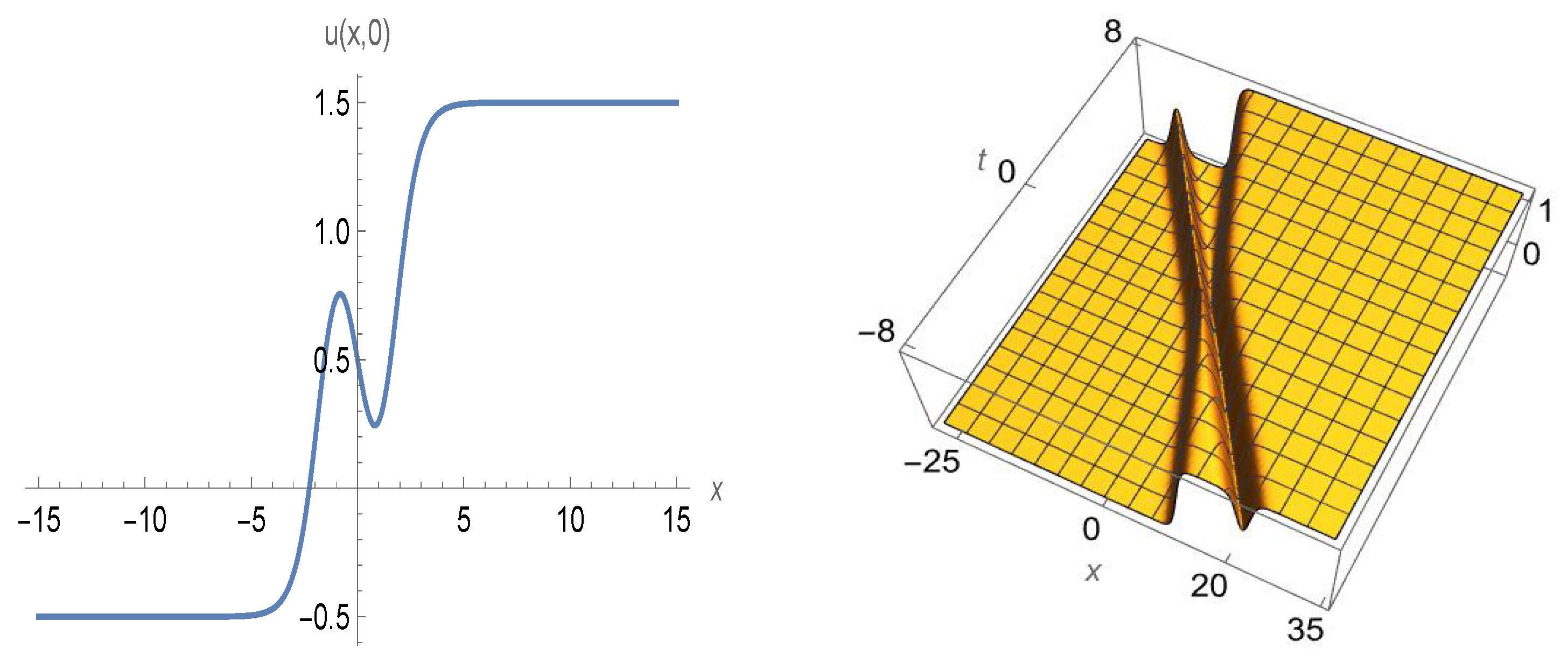
Figure 8.
2D and 3D graphs of solution (155) for , , and .
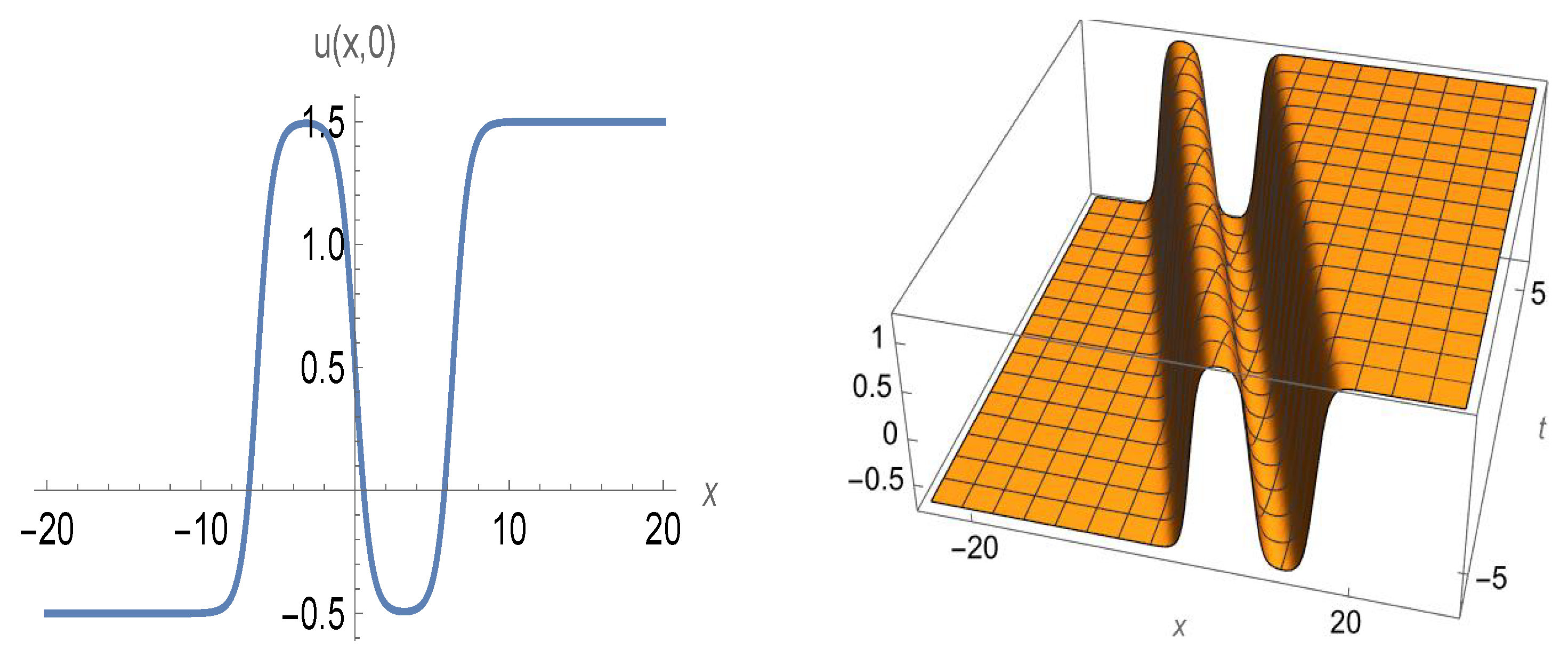
Figure 9.
2D and 3D graphs of solution (155) for , , and .
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



