
Submitted:
05 August 2024
Posted:
06 August 2024
You are already at the latest version
Abstract
Electric vehicles (EVs) are pivotal in addressing the escalating environmental crisis. While EV drivetrains excel compared to those of vehicles with internal combustion engines (ICE), their energy storage systems are hampered by limited range, lifespan, and lengthy charging times. Hybrid energy storage systems (HESS) present a viable current solution to these issues. This review thoroughly explores state-of-the-art in the emerging field of multisource EVs that utilize HESS, incorporating any combination of batteries (BTs), supercapacitors (SCs), flywheels (FWs), fuel cells (FCs), and/or transmotors. In addition, the paper systematically categorizes and evaluates different hybrid configurations, detailing potential topologies and their respective advantages and limitations. Moreover, the paper examines diverse control algorithms used to manage these complex systems, focusing on their effectiveness and operational efficiency. By identifying current research gaps and technological challenges, this study aims to delineate future research directions that could enhance the deployment and optimization of multisource EVs, thereby addressing critical challenges such as energy density, system reliability, and cost-effectiveness.
Keywords:
multisource electric vehicles
; hybrid energy storage systems
; energy management control algorithms
; batteries
; supercapacitors
; flywheels
; transmotor
1. Introduction
Electric vehicles (EVs) predate cars with internal combustion engines (ICEs), having been developed first during the 1800s, before becoming largely supplanted by ICE vehicles in the early 20th century due to the invention of the electric starter, primarily due to the absence of rechargeable batteries (BTs), high cost of acquisition and their limited range. However, as the environmental crisis became more apparent, concerns escalated among relevant authorities due to the eminence of ICE vehicles in global emission share. By the 1950s, legislation began to emerge recommending the adoption of EVs as a mean to reduce air pollution [1]. Nowadays EVs have a major role in the automotive market in comparison to previous years [2]. Despite significant advancements in battery (BT) technology, particularly lithium-ion BTs, EVs still face challenges related to BT lifespan, range, and charging times, which deter widespread adoption compared to the rapid refueling capabilities of Internal Combustion Engine Vehicles (ICE Vehicles) [3]. A transitional solution has been hybrid electric vehicles (HEVs), which typically combine gasoline engines with electric motors and BTs. The first hybrid car, developed by Porsche in 1900, featured hub motors [4], technologically advanced for its time. HEVs are categorized into mild hybrid EVs (MHEVs), full hybrid EVs, and plug-in hybrid EV (PHEVs), all of which include ICEs while mitigating their environmental pollution by balancing while leveraging their benefits. This is achieved by utilizing the efficiency of electric motors, which is around 96%, significantly higher than the 40% efficiency of ICEs, especially outside the limited high efficiency speed regions of ICEs [5,6].
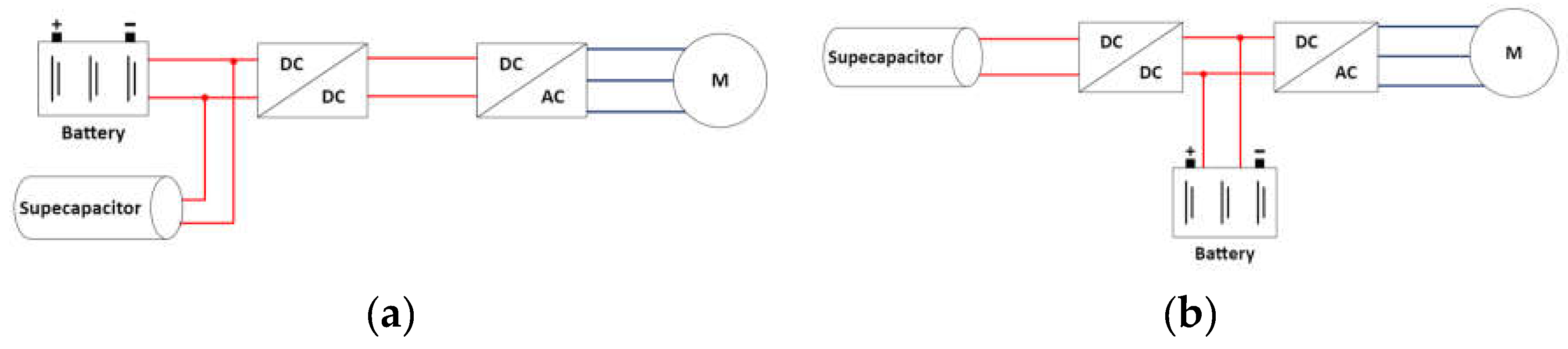
To further address the limitations of BT technology, which is the main reason of incorporating an ICE in the vehicle in the first place, hybrid energy storage systems (HESS) have been introduced, combining BTs, supercapacitors (SCs), fuel cells (FCs), and flywheels (FWs). Unlike BTs, FCs are not energy storage devices; they generate electricity from hydrogen stored in tanks, necessitating a storage system for the fuel. For the purposes of this paper, when referring to FCs combined with their hydrogen storage tanks, they will be treated as a storage system. These systems allow for a main power source, such as a BT or FC, to support cruising speeds, while a secondary power source, like SCs or FWs, manages high-demand situations such as acceleration [7]. This arrangement leverages the high energy density of the primary source and the high power density of the secondary sources, facilitating rapid energy delivery, necessary for functions like regenerative braking [8]. EVs that use BTs as their primary power source are called BT Electric Vehicles (BEVs), and those that use FCs are called Fuel Cell Electric Vehicles (FCEVs). Collectively, these can be categorized under the broader term of multisource EVs. Recent research into transmotors, which distribute power magneto-mechanically among components like FWs and BTs, further enhances HESS capabilities [9].
As the complexity of these systems increases, so does the need for sophisticated control algorithms to ensure they meet the power demands of EV drivetrains while maintaining vehicle safety. Control algorithms are categorized into rule-based, optimization-based, and learning-based. Both rule-based and optimization-based algorithms can function as online or offline methods. A new category is proposed in this paper, called hybrid and focuses on combining some of the previous.
Past works, such as the following reviews [7,8,10,11,12], highlight the significance of HESS in EVs. However, some of these studies have become obsolete due to rapid advancement, others focus only on HEVs with ICEs, and some do not cover all possible HESS configurations. Additionally, some studies exclusively address topologies [13] or focus only on energy management algorithms [14]. Yet, the overall efficiency of the drivetrain depends on both factors of topology and energy management algorithms, making it crucial to consider a comprehensive overview of the subject to define the most suitable path for implementing this technology.
By identifying current research gaps and the most critical technological challenges, this study aims to delineate future research directions that could enhance the deployment and optimization of multisource EVs, thoroughly addressing factors such as energy density, system reliability, and cost-effectiveness. To achieve this, the review examines HESS topologies and energy management algorithms in EVs powered exclusively by electric motors, foregoing the current ICE hybrid as a “band-aid fix”. Understanding the working principles of each HESS component is crucial for determining their ideal roles and exploring the state-of-the-art technologies in these power sources to address their weaknesses through hybridization. Furthermore, the configuration of these components, the number of DC/DC converters used, and the inclusion of regenerative braking capabilities significantly impact the system's efficiency and performance. Therefore, gathering all possible topologies with their respective advantages and disadvantages is essential. Managing the energy flow within these topologies is critical to effectively meet the power demands of the drivetrain and the needs of the driver.
This paper is organized as follows. Firstly, it briefly reports on the current research status of HESS and projected future trends. It then critically summarizes the topologies commonly used in BEVs and FCEVs. Additionally, the latest energy management strategies for both types of EVs are classified. To the best of their ability, the authors made an effort not to repeat any reviewed work, but rather provide an outline and create a web of relevant citations while reviewing newer publications. The purpose of this paper is to serve as a reference, guiding researchers in the right direction for studying and implementing HESS in EVs.
Section 2 provides the definition of HESS and the current research status. Section 3 reviews transmotor technologies and topologies to date. Section 4 describes the topology classification of multisource EVs. Section 5 summarizes, concludes, and categorizes the energy management strategies. Finally, Section 6 offers the conclusion and suggestions.
2. Hybrid Energy Storage System (HESS)
Over the last years, the urgent need to reduce air pollutants and protect the environment has led to rapid advances in the energy sector [15]. New requirements have emerged regarding the storage of the generated energy, necessitating upgrades to energy storage system (ESS). Those systems are being deployed in a vast range of technological areas such as electric vehicles, microgrids and renewable energy-based applications [16]. In electromobility, their primary purpose is to secure the supply of power to the electric motor. Additionally, specific types of ESSs, such as batteries, are utilized in certain applications such as the Vehicle-to-Grid (V2G) to regulate and control the vehicle's energy flow towards the grid. ESS can be classified by energy type, resulting in mechanical, electrochemical, chemical, electrical, thermal and hybrid systems. This broad categorization paves the way for the introduction of Hybrid Energy Storage Systems (HESS), which integrate these various types into a cohesive unit. A HESS is comprised of a combination of the energy storage technologies of BTs, SCs, FWs, and FCs. Since a FC is not a storage system but a power generator, it requires a tank to store the necessary fuel to function effectively as a storage system. For clarity, any references to FCs in this paper will assume the inclusion of a storage tank system. These energy sources collectively supply power to the vehicle's drivetrain by converting or transferring stored energy into electrical form to power the electric motor of the EV. This chapter will analyze these systems to elucidate the concept of hybridization in EV storage systems.
2.1 Battery (BT)
The most widely used energy storage device (ESD) is the battery, found in almost every existing technology with energy supplying requirement, such as mobile phones, residences, electric vehicles etc. [17]. It directly converts chemical energy into electrical energy, offering the vice versa possibility in case of rechargeable technology. The fundamental construction part of an accumulator is the cell. Every cell contains three active materials, two electrodes and one electrolyte. There are two electrodes, one positive-cathode and one negative-anode, between which the electrolyte is interposed. The electrolyte creates a conductive environment that facilitates the chemical rection, responsible for producing DC energy, as shown in Figure 1a [5].
Over the past two decades, the predominant BT technologies have been lead-acid, nickel-metal hydride (NiMH), and lithium-ion BTs, with the latter being the primary focus of research and the most commonly used in EVs. Lithium-ion BTs are now fundamental to modern EVs due to their high energy density, effective thermal management and longevity, surpassing other BT types. They are also notable for their recyclability using sustainable methods and materials, which lessens their environmental footprint [20]. However, challenges such as relatively low energy density when compared to gasoline/diesel or hydrogen high production costs, which increase the price of EVs, performance degradation over time, and safety concerns related to thermal runaway are prompting researchers and engineers to reconsider their viability [21]. Ongoing research is exploring alternative BT chemistries like Metal-Air, including Lithium-air and Zinc-air and Nickel-Based BTs, which offer higher energy densities [22,23]. Another promising advancement in EV BT technology is the transition from liquid to solid electrolytes. Solid-state BTs are expected to provide higher energy densities, quicker charging times, and significantly improved safety by reducing fire risks. Overcoming the hurdles of complex manufacturing processes and high production costs will be crucial for their successful adoption in EVs [24]. Therefore, it is evident that BT technology alone cannot adequately support EVs for the foreseeable future; they require supplementary power sources to mitigate their limitations.
2.2 Fuel Cell (FC)
A FC is a device that transforms the chemical energy of fuel and an oxidizing agent to electrical one through the redox reaction, following the same principle of operation as the chemical BT. The Proton Exchange Membrane (PEM) FC, which uses hydrogen as the fuel and air as the oxidizing agent, is one of the most common types of FCs used in automotive applications [25]. In a BT, the reactive chemicals are pre-installed in each cell [8]. Once the active chemicals are depleted, the cell is dead and must be recharged from an external source. In contrast, a FC is continuously supplied with the necessary reactive chemicals from elements provided outside the cell, such as a tank, which is the main storage in EVs. If the supply of reactants is maintained, the FC can produce electrical energy. This continuous supply mechanism makes it similar to ICE which produces mechanical energy as long as it is fueled. FCs are more efficient than ICEs, as their energy conversion is not bound by the limitations of the Carnot cycle. They also offer the advantages of rapid refueling and higher energy storage capacity, akin to a conventional fuel tank, compared to chemical BTs. Structurally, a FC resembles a cell within a chemical BT array [26] (see Figure 1b).
The fuel and oxidizing agent are continuously and separately supplied to the anode and cathode electrodes, where they are ionized. The presence of an electrolyte is also essential, which is used to transfer positive ions from the anode to the cathode, and at the same time, to transfer electrons from the anode to the cathode through an electrical load [5].
A single FC has a very low voltage. In practice, an array consisting of FCs may consist of hundreds of individual cells connected in series with each other. A FC stack requires auxiliary components to support its operation. These can include a pump responsible for air circulation, a pump for circulating coolant, an exhaust fan, a fuel supply pump, and some electrical control devices. Part of the energy produced by the FC used to support the operation of these auxiliary components [26].
FCs appear to be a promising technology for clean energy due to direct chemical-to-electric energy conversion, which can reach up to 60% efficiency. Furthermore, the byproducts are only water and heat, making them environmentally friendly and contributing to improved air quality in urban areas, especially when compared to traditional combustion-based power sources —a critical concurrent issue [27]. Additionally, FCs tend to have a longer lifespan than BTs and do not degrade significantly with use [28]. On the other hand, extensive use of platinum in FCs makes them quite expensive, and the gas tanks required for storing hydrogen at high pressure is a significant addition to the cost. Moreover, most hydrogen is currently produced from natural gas, which undermines some of the environmental benefits. While the production of green hydrogen through electrolysis is cleaner, it is also more costly [19]. FCs also exhibit a slow response time and lack support for regenerative braking, necessitating an auxiliary power source for sudden accelerations and for capturing energy from regenerative braking processes [5].
Future research is focused on developing alternative catalysts, such as carbon-coated nickel and transition metal nitrides, to replace platinum and reduce costs. Efforts are also underway to scale up green hydrogen production using renewable energy sources [29]. Increasing investment in hydrogen refueling infrastructure is essential; governments and private entities are actively expanding the network of hydrogen stations [28]. Additionally, the integration of FCs with BTs and SCs in hybrid systems is being explored to enhance efficiency and performance. This approach aims to provide a more balanced power supply for EVs, ultimately reducing costs. Research on regenerative FCs, which could produce hydrogen from regenerative braking and improve overall efficiency, is also promising [30]. If these advancements are realized, FCs should become a promising alternative for BTs.
2.3 Supercapacitor (SC)
SCs, also known as ultracapacitors, are capacitors characterized by their substantial energy storage capacity despite their comparatively compact size. Some state-of-the-art SCs utilize high surface area regions for charge storage per unit of material, employing materials such as ruthenium dioxide (RuO2) and carbon electrodes [1,31]. However, ruthenium is extremely expensive and available only in very limited quantities [12].
A SC stores energy by physically separating positive and negative charges. This separation occurs when a voltage is applied at its terminals, prompting the movement of ions within the electrolyte [8]. The charges are stored on two parallel plates separated by an insulator. Since there are no chemical reactions in the electrodes, SCs have a long lifespan but are characterized by low energy density [26]. Figure 2 illustrates the structure of an individual SC, specifically the electrical double-layer one. The potential applied to the positive electrode attracts negative ions in the electrolyte, while the potential at the negative electrode attracts positive ions. The most used SC technologies in EVs include Electric Double-Layer Capacitors (EDLCs), pseudo capacitors and hybrid capacitors [32].
The power density of SCs is significantly higher than the one of BTs, attributable to their ability to physically store charge on the surface of their electrodes and retain it electrostatically. This method of energy storage enables SCs to charge and discharge much faster than BTs, making them highly suitable for transients in electric propulsion applications. SCs excel in recovering energy from regenerative braking—typically lost as heat—and can significantly reduce losses in the vehicle’s drivetrain. In urban driving scenarios, characterized by frequent “starts and stops”, the overall power requirement remains relatively low, making SCs ideal for capturing and instantaneously providing electrical energy for vehicle acceleration due to their rapid charge-discharge rates [12]. Additionally, their low internal resistance enhances efficiency, although there is a risk of high currents if the SC is charged at a very low state of charge (SoC). The voltage at the terminals of an SC is directly proportional to its SoC, yet the development of electronic interfaces has enabled SCs to operate effectively across their whole voltage range [7].
BTs exhibit higher energy density compared to SCs, whereas SCs have a higher power density. The longer lifespan and low maintenance requirements of SCs contribute to cost savings. In hybrid electric vehicle applications, combining SCs and BTs can optimize the benefits of both storage types, with each compensating for the other's shortcomings [34].
Researchers are exploring various methods to increase the surface area of electrodes, aiming to enhance the weakness in energy storage capacity of SCs [35]. Development efforts are also underway for new electrode materials such as graphene, carbon nanotubes, and metal oxides to improve the energy density and performance of SCs. Currently, there are five SC technologies under development: carbon/metal fiber composites, foamed carbon, carbon particulate with a binder, doped conducting polymer films on carbon cloth, and mixed metal oxide coatings on metal foil [36].
If the previously mentioned minor drawbacks of SCs are addressed, they could significantly enhance the functionality of EVs. An innovative idea proposed by ref. [37] suggests that as SCs age, they could be repurposed for second applications with lower demands, akin to a recycling cycle. Increasing the energy density of SCs will greatly enhance the range of EVs.
2.3 Flywheel (FW)
The FW is an energy storage device that stores mechanical energy in a high inertia rotating wheel. FWs employed in EVs are typically high-speed. FWs can deliver large amounts of power quickly, making them ideal for applications requiring short bursts of high energy, such as accelerating vehicles. Unlike chemical BTs, FWs do not degrade significantly over time, allowing for millions of charge-discharge cycles with minimal maintenance. This longevity reduces the overall cost and environmental impact [38]. FWs offer high round-trip efficiency, up to 85%, due to low internal friction, which is further enhanced in systems that use magnetic levitation to reduce bearing losses [10]. There are two approaches of using the FW in traction applications [12,26].
The first approach, depicted in Figure 3.a addresses the challenge of applying the mechanical energy of the FW directly to vehicle propulsion by proposing the connection of a high-speed electric motor to the FW, creating a "mechanical BT." This allows the FW to be charged and discharged through the electric motor. The primary advantage of a FW system lies in its high energy capacity and low environmental dependency, particularly with respect to temperature variations. However, the high speeds required necessitate the use of high-strength materials and specially designed bearings, such as magnetic bearings. Additionally, the high speeds characteristic of the FW generates vortices that reduce the aerodynamic performance of the FW -electric machine system. One possible solution is to house the FW in a sealed environment with significantly reduced air pressure, effectively creating a vacuum. This requirement, however, makes the integration of FWs into electric propulsion applications quite demanding.
The second approach employs a novel technology, the transmotor, to connect the FW directly to the drive shaft, as shown in Figure 3b. In this method, the energy from the FW can be charged or discharged magneto-mechanically, meaning that the mechanical (kinetic) energy stored in the vehicle can be transferred directly to the FW without significant energy loss during its conversion to electrical form. This principle also holds during the reverse conversion. Additionally, this approach is considered more efficient compared to the first one. Due to the complexity of the transmotor, the keen interest from the research community, and the potential of this approach, the transmotor will be discussed in section 3 [40].
A summary of previous mentioned HESS is presented in Table 1.
3. Transmotor
The Transmotor is a dual-rotor electrical machine, comprised of an inner rotor and an outer rotor. Each of these rotating elements is connected to one of the mechanical ports (axles), allowing each rotor to independently receive or deliver mechanical power. The electrical port controls the rate of energy transfer between the two mechanical ports by adjusting the current in the windings [26]. Additionally, the electrical frequency of the currents applied to the windings should be equal to the relative speed of the rotors multiplied by the number of pole-pairs, ensuring effective magnetic coupling between the two rotating parts.
Transmotor’s operating principle resembles that of a conventional electric machine with its dual mechanical shafts resulting in two mechanical torques. According to Newton’s third law, the torques produced on both shafts have the same magnitude but opposite directions. The mathematical equations governing the angular velocity of the transmotor’s port or the frequency of the currents applied to the windings, the torque, and the power [45] are presented in equations (1) – (3) respectively:
Where:
- elec refers to the electrical port;
- ir refers to the inner rotor;
- or refers to the outer rotor.
- is the electrical frequency of the currents applied to the windings;
- is the number of pole pairs of the Transmotor;
- is the rotating speed of the inner rotor;
- is the rotating speed of the outer rotor;
- is the electrical Torque;
- is the inner rotor’s Torque;
- is the outer rotor’s Torque;
- is the electromotive force induced in the conductor;
- is the velocity of the conductor’
- is the Magnetic field;
- is the length vector of the conductor.
The functionality of the transmotor across various scenarios can be understood through detailed breakdowns [45] as explained below, and summed in Table 2:
- Scenario A: The vehicle aims to accelerate. When the inner rotor (FW) spins faster than the outer rotor (drive shaft), the transmotor's clutch function engages to transfer kinetic energy from the FW to the drive shaft. Simultaneously, its generator function converts excess kinetic energy from the FW into electrical energy, charging the BT. As a result, the vehicle accelerates using mechanical energy from the FW, enhancing the BT ‘s charge. Interestingly, this topology is unique as it charges the BT instead of draining it during acceleration demands.
- Scenario B: The vehicle also intends to accelerate, but in this scenario, the outer rotor (drive shaft) moves faster than the inner rotor (FW). Here, the transmotor's clutch function aids in managing power transfer from the BT to the drive shaft, and its electric motor function converts electrical energy from the BT into mechanical energy, assisting in drive shaft acceleration. Consequently, the vehicle harnesses additional power from the BT for acceleration.
- Scenario C: The vehicle decelerates with the outer rotor (drive shaft) moving faster than the inner rotor (FW). The transmotor engages its clutch to manage the deceleration process and transfer excess kinetic energy from the drive shaft to the FW. Its generator function then converts this excess kinetic energy into electrical energy, recharging the BT. The outcome is vehicle deceleration accompanied by BT charging.
- Scenario D: The vehicle needs to decelerate, and the inner rotor (FW) is spinning faster than the outer rotor (drive shaft). The transmotor's clutch function engages to manage the power transfer from the BT, providing braking power. Then the transmotor will work as a generator charging the BT system.
Nima et al [46] discuss a kinetic energy recovery system (KERS), utilizing an active electromagnetic slip coupling mechanism that efficiently transfers energy between the vehicle and a lightweight FW. Essentially, it's a simpler, more economical version of a transmotor, focusing on maximizing energy recovery efficiency and suited for a broader range of EVs. The concept has been experimentally verified using a SC instead of a BT, which proved successful for the proof of concept. However, the control algorithm was not analyzed in detail. It would also be interesting to see the actual behavior with a BT, which differs from the SC case, and compare the scenarios in various driving situations. Moreover, in the case study, the vehicle cruising at 216 km/h is not representative of the broader range of EVs that it aims to address, since the suggested system’s performance is not evaluated at lower speed ranges. Also, testing how the system performs under a wider range of operational scenarios, including varying speeds, loads, and environmental conditions, would help in understanding the limits and full capabilities of the transmotor. Finally, a lifespan study would be meaningful to determine how the FW reduces the charge/discharge cycles of the BT.
Ramin et al [45] proposed a transmotor-based power system for high-performance EVs, demonstrating a significant reduction in acceleration time needed to reach the maximum speed by 34%, as well as enhanced deceleration and gradeability. Additionally, the effectiveness of regenerative braking was shown to improve, attributed to increased energy absorption, particularly at higher speeds, due to the availability of maximum deceleration torque at any desired speed. These enhancements were demonstrated through computer simulations and emulation tests. However, the control algorithm, a frequently discussed topic regarding transmotor challenges, was not clearly described in their study.
In Ref. [9], an innovative approach is proposed and experimentally validated. When the vehicle is cruising, indicating no need for aggressive acceleration or deceleration, the transmotor functions similarly to a conventional Permanent Magnet Synchronous Motor (PMSM) as depicted in Figure 4. This is achieved by activating a lock on the FW axle and disengaging the clutch, thereby locking the windings and preventing rotation, which reduces electrical losses. Consequently, only the outer rotor (drive shaft axle) rotates freely. This method allows for precise control of the output torque by managing the winding currents, reducing the load on the BT and optimizing energy usage to maintain a constant vehicle speed. Essentially, the transmotor-based KERS effectively utilizes the FW system during periods of high energy exchange (acceleration and deceleration) while disengaging it during steady-state cruising to minimize unnecessary energy losses. This strategy enhances energy efficiency, reduces BT load, and optimizes vehicle performance. The substantial reduction in volt-ampere of braking and electrical storage capacity in Ah by factors of 2.7 and 8, respectively, positions this system as an excellent candidate for HESS. This efficiency eliminates the need for a large, heavy, and costly BT pack, especially when supplemented with an SC as an assistant.
Ramin et al proposed a transmotor-FW powertrain assisted by SCs [47]. The concept is highly innovative, and the results confirm its effectiveness. Utilizing a Proportional-Integral (PI) controller along with a rule-based, deterministic state machine and hysteresis control, they managed to reduce the BT pack rating by 80% and significantly enhance energy recovery from regenerative braking. However, the paper focuses on regenerative braking energy; the testing was only conducted in braking situations. The outcomes discuss using the BT in low-demand scenarios, such as cruising. To implement this concept in a real-world scenario, a control algorithm must be designed to address the complexity of this system and verify its implementation. The latter point is commonly observed in literature and is promising for future work.
Nima et al suggested an improvement to their initial idea [48], proposing a FW-Based All-Wheel-Drive Electric Powertrain. They successfully managed to meet both acceleration and deceleration power demands using only the FW. In practice, rather than charging the BT, the excess energy is directly transferred to another PMSM. This approach further reduces the BT’s charging and discharging cycles, with the BT being used solely for cruising, thereby enhancing its lifespan and performance. Although the concept has been evaluated for journeys at a consistent speed of 160 km/h, it has not been tested under conditions of reduced or variable speeds. A comprehensive study should consider speeds that adhere to the legal limits prevalent in various regions, including both urban centers and highways. Additionally, no specific information was provided about the simulation program or the conditions under which it was conducted, nor about the control algorithms used. An economic survey regarding the lifespan of the BT would be beneficial to mathematically substantiate the results.
It is evident that the transmotor can function as a coupling device between the FW and the driveshaft, enabling the direct transfer of mechanical energy without the need for converting it between different forms. This capability significantly enhances the overall efficiency of this drivetrain scheme in EVs. Additionally, the required BT power rating is reduced, particularly when a SC is also utilized. The transmotor is capable of transferring more mechanical power than its electrical rating might suggest—up to twice the rated electrical power, limited only by the structural integrity of the machine itself [45]. If the implementation challenges of the transmotor are overcome and a real-time control system is established [49], then the transmotor is poised to play a significant role in the practical application of FWs in EVs.
4. Multisource EVs
The study and evolution of hybrid vehicles have led to the emergence of a new category: multisource electric vehicles (MEVs) [40]. While some researchers may view MEVs as a subcategory within the broader hybrid vehicle framework, they actually represent a distinct classification that relies on hybrid vehicle principles. MEVs are electric cars equipped with an electric engine and a HESS [26]. Specifically, MEVs include BT electric vehicles (BEVs) enhanced with SCs or FWs, or both, and FCEVs supplemented with SCs or BTs or FWs, or a combination of them [7,8]. EVs equipped with transmotor technology, as mentioned in the previous section, are also characterized as multisource, as they feature an electric motor a HESS, primarily consisting of FW. This section will explore the unique characteristics of MEVs, emphasizing on how they integrate electric propulsion with hybrid energy management to enhance vehicle efficiency and performance.
4.1 Topologies of HESS
A HESS for MEVs is a storage system that combines two or more energy technologies. The primary objective of implementing a HESS is to blend the high energy density of one storage technology with the high-power density of another. Power density refers to the amount of power that a storage system can deliver, per unit volume or mass, while energy density refers to the amount of energy that can be stored in a storage system, per unit volume or mass. The result of this combination can lead to a higher delivered power and energy density from the energy system, improved overall performance of the EV and better fuel consumption, achieving greater autonomy [40]. This combination ultimately extends the lifespan of each energy source by reducing the induced strain from unfavorable demands, such as high rate of discharge from batteries or reaching the SC lower voltage limit frequently [26].
However, the way these sources are integrated—the topology of the system—significantly impacts their performance and cost. Factors such as the necessity for control systems, the use of a DC/DC converter or a multi-converter, play a crucial role in their performance. An appropriate power management algorithm, leveraging the strengths of each component, is essential to control the power flow between these sources in a way that results in a better application. In this subsection, all the plausible topologies that have been discussed in previous works will be presented while detailing their advantages and disadvantages, which are summarized in Table 3. The next section will be focused on energy management algorithms [50].
4.1.1. BEV
In the modern era, EVs primarily rely on BTs. However, BT technology alone is often insufficient, as it struggles to meet the demands for high energy performance, low cost, and both high volumetric and gravimetric energy densities. Additionally, BTs face challenges in applications requiring high charging and discharging rates, which can lead to unsatisfactory lifespans when frequently subjected to such conditions. SCs, characterized by their high power density (approximately 5-10 kW/kg), and FWs can deliver high-efficiency energy and currents quickly and efficiently, significantly extending BT life. However, both have limited energy storage capacity. Thus, the combination of BTs with SCs or FW forms a promising solution. Such a HESS can deliver high power and store sufficient energy to ensure substantial driving autonomy. Furthermore, hybridizing BTs with SCs or FW alleviates the strain on BTs while potentially also enhancing acceleration and performance in high-load situations, expanding their lifetime [51]. Finally, due to their rapid charging capabilities, SCs or FWs can assist BTs in capturing energy from the vehicle’s regenerative braking systems [52].
Firstly, the HESS that consists of BTs and SCs is presented. There are several topologies depending on how BTs and SCs are configured within the vehicle. The configurations include:
- Passive cascade BT and SC configuration: In this setup, SCs are connected in parallel with the BT as depicted in Figure 4.a to enhance the power performance capability of the system. A bidirectional converter links the SCs to the DC-link, controlling the power flow either sourced from or fed into the SCs. Despite significant voltage fluctuations at the SC terminals, the voltage at the DC-link is maintained nearly constant due to the regulation by the bidirectional converter. However, the BT voltage is equal to the DC-link voltage, as there is no control mechanism between the BT and the SC. The current from the BT must both charge the SC and provide power to the load. A major disadvantage of this placement is its inefficiency in utilizing the stored energy in the SC [8,13,26,40,53].
- Active Cascade System (Active cascade UC/ BT configuration: Similar to (1), this system includes a DC/DC current converter between the BT array and the SC as shown in Figure 4.b, allowing for lower SC voltage relative to the BT, which matches the DC-link voltage. This setup enhances the system's maximum power output but is plagued by frequent BT charging and discharging cycles and inefficient storage of energy from regenerative braking in the SC [8,26,40,53].
- Active Cascade System with Reverse BT -SC Connectivity (Active cascade BT/UC configuration): In this configuration, presented in Figure 5.a, the BT voltage is lower than that of the SC, which aligns with the DC-link voltage. The BT voltage is boosted to a higher level, allowing for a reduction in current which reduces the BT's capacity requirements and, consequently, the cost of the application. Additionally, this setup allows more efficient control of the BT current compared to setup (1). The BT provides average power, while the SC handles instantaneous demands and captures energy quickly from regenerative braking. The downside is that the BT cannot be charged from the braking energy or from the SC due to the one-way boost converter [8,26,40,53].
- Parallel Passive Cascade System with Two DC–DC Converters: In this system, the SC and the ΒΤ are connected in parallel to the DC-link through bidirectional converters, as seen in Figure 5.b, allowing the SC to deliver 100% of its stored energy. Unlike previous configurations, the BT and SC voltages, which are lower than the DC-link voltage, are adjusted based on power requirements. This setup permits separate control of power flow to and from each storage unit, enhancing flexibility in power management. The converters moderate fluctuations in BT current, significantly reducing strain. Integrating the two DC/DC converters into a single unit could further reduce cost, size, and control complexity [8,13,26,40,53].
- Multiple Converter Configuration: This configuration, explained at Figure 6.a, employs individually controlled DC-DC converters to link each energy source to the DC-link, requiring the voltages of the BT and SC to match the DC-link voltage. This setup, however, necessitates two full-power converters, substantially increasing the application's cost and size [8,26,40,53].
- Multi-Input Converter Configuration: This configuration aims to reduce the costs associated with the multiple converters in (5). It connects the BT and SC to a common inductor with parallel switches, each paired with a diode to prevent short-circuit. A bidirectional DC/DC current converter controls power flow between the inputs and loads, operating in boost mode when powering loads and in buck mode during energy recovery from braking. The setup demonstrated in Figure 6.b uses a common inductor for all energy sources if additional inputs are present. It addresses the disadvantages of previous topologies by reducing costs and weight while enhancing performance, though it involves a more complex control and power management strategy [8,13,26,40,53].
- Proposed Hybrid ESS Configuration: According to Ref. [8], a hybrid topology is proposed where a higher-voltage SC directly connected to the DC-link to cover maximum power demands, while a lower-voltage BT is connected through a power diode or a controlled switch. This system operates in four modes: low power, high power, braking, and acceleration. During low load conditions, the SC primarily powers the load, with the BT contributing when greater power is needed. Energy generated from regenerative braking can be directed solely to the SC for rapid charging, or it can be distributed to both the BT and SC for a more thorough charge
Regarding the systems involving BT-FW, and BT-FW-SC, we have discussed the latest research in Section 3, where the transmotor plays a crucial role in the topology of these systems. Topologies that include BT and FW, but exclude a transmotor, have been covered in previous works such as [54,55,56]. Based on the holistic review, future research is expected to focus on transmotor coupling due to its ability to handle variable gear ratios, which significantly enhances the overall efficiency of the drivetrain. Additionally, the transmotor addresses the challenge of converting mechanical and electrical energy to charge or discharge the BTs.
4.1.2. Fuel Cell Electric Vehicle (FCEV)
A FCEV employs a hydrogen FC as its primary power source. These vehicles are considered environmentally friendly because the only byproduct of the chemical reaction between hydrogen and oxygen is water. Hydrogen, used as an energy source, is economically, socially, environmentally, and climatically sustainable, primarily because of its abundant availability in water [53]. Vehicles equipped with FCs offer long driving ranges and require short refueling times, making them significantly more fuel-efficient compared to those with ICEs especially when their efficiency is considered. While FCEVs have been tested in several pilot applications, they face challenges in widespread implementation. Safety concerns, particularly regarding the concurrently pressurized storage of the highly flammable hydrogen, which can form explosive mixtures with air, pose major hurdles. Additionally, the environmental benefits of FCEVs are compromised if the hydrogen is sourced from fossil fuels. There are two types of FCEVs: the basic FCEV, which shares the same architecture as an electric vehicle, and the hybrid FCEV (FCHEV), which includes a secondary energy storage system (ESS) such as BTs or SCs or FWs [12]. In this review, we will primarily focus on the second configuration as the novel, more promising application.
In FCHEVs, various types of ESS are employed. A common configuration includes pairing FCs with SCs, where the SCs capture energy generated from regenerative braking and provide additional power during acceleration phases [7]. Generally, SCs alone do not possess enough stored energy to power the vehicle at low speeds. Optimal vehicle performance is typically achieved by maintaining a constant sum of the vehicle’s kinetic energy and the energy stored in the SC [57].
There two ways of connecting the SC to the DC-link of the FCEV.
- Direct Parallel Connection/Semi-active Topology: In this setup, the SC is connected directly to the DC-link without a DC/DC converter while the FC is connected to the DC-link with a non-bidirectional DC/DC converter as depicted in Figure 7.a. This direct connection simplifies the circuitry and control strategies, enhancing cost-effectiveness by eliminating the need for a DC/DC converter and enabling faster response times to power demands. However, this arrangement can lead to a voltage mismatch between the SC and the DC-link, particularly as the SoC of the SC changes. There is no precise control of the power flow between the SC and the system, which could lead to instability under varying operational conditions and increased wear, ultimately reducing their lifespan [58,59,60].
- Indirect Parallel Connection/Active Topology: In this configuration, Figure 7.b, the SC is connected through a DC/DC converter to the DC-link, while the FC is connected to the DC-link with a non-bidirectional DC/DC converter. This arrangement allows for voltage regulation, ensuring optimal charging/discharging of SCs and maintaining a stable system voltage, a necessity given the voltage variation of SC according to its SoC [60]. Precise control of the power flow is achievable, using SCs under optimal conditions and ensuring their longevity. The converters can act as a buffer, protecting SCs from sudden voltage spikes. On the other hand, the complexity of the systems increases the requirement of sophisticated management algorithms, while converters raise the manufacturing cost [26,58,59].
The most widespread configuration includes pairing FCs with BTs. In a hybrid vehicle equipped with both FCs and a BT, the BT functions to store energy from regenerative braking, supplies additional power during acceleration, and drives the vehicle at low speeds [61]. This prevents operating the FC at low power, which falls within its low-efficiency range. Charging the BT using the FC is generally inefficient due to losses from DC/DC converters and internal BT inefficiencies. It is advisable to only charge the BT when its SoC falls below 50%. Simulation results presented in [7] indicate that it is more efficient to rely solely on the BT’s power when the percentage of current demanded from the FC is less than 7.55% of the total. An FC designed for automotive use is capable of transitioning from an idle state to full power in less than four seconds. It is important to note that during regenerative braking, if the SOC of the BT exceeds 98%, it does not accept energy from regenerative braking and primarily serves as mechanical braking.
There are four ways of connecting the BT to the DC-link of the FCEV.
- Direct Parallel Connection of both: In this configuration, Figure 8.a, both the BT and the FC are connected directly to the DC-link without any DC/DC converters. Clearly, this setup is the most cost-effective, simplest, and easiest to implement in a FCEV. However, the risks associated with backward current flow due to the uncontrollable DC voltage at the DC-link, and the limitations in controlling power flow, are significant drawbacks that render this topology unsuitable for implementation in an FCEV [59,60]. The issue of backward current flow can be mitigated by using diodes, but this solution reduces the overall efficiency [62]. Finally, regenerative braking is not feasible with this topology.
- Direct Parallel Connection of FC: In this setup, the BT is connected through a bidirectional DC/DC converter to the DC-link, while the FC is connected directly to the DC-link [60], as depicted in Figure 8.b. The FC regulates the DC-link voltage, which can exhibit significant variations due to the stochastic nature of the vehicle. This variability can reduce the overall performance of the vehicle [62]. The DC/DC converter facilitates the capture of energy from regenerative braking [59], which helps to offset the efficiency reduction incurred by the implementation of the DC/DC converter.
- Direct Parallel Connection of BT: In this configuration, Figure 9.a, the FC is connected through a non-bidirectional DC/DC converter to the DC-link, while the BT is connected directly to the DC-link [51]. Contrasting with scenario (2), voltage fluctuations at the DC-link are now reduced due to the DC/DC converter and the stable voltage behavior of the BT, which does not vary significantly in comparison to FC behavior. This stability enhances the overall efficiency of the powertrain. The BT also controls the DC-link voltage, and its characteristics play a significant role in maintaining the voltage within acceptable limits [62]. However, this topology does not support capturing energy from regenerative braking [60]. According to a comparison of FCEV topologies in ref. [58], this setup is the most cost-effective one, owing to its efficiency capabilities.
- Indirect Parallel Connection of both: In this topology, FC and BT are connected through a DC/DC converter to the DC-link, while the BT connection is supporting a bidirectional power flow [51,58], as shown in Figure 9.b. This configuration is more complicated than the previous ones, it presents ripple currents that damage the BT system and require a larger filter, which along with the dual DC/DC converters makes this system the costliest. Voltage regulation achieves a stable DC-link voltage [59], alleviating the need of matching power source characteristics. Regenerative braking is enabled in this configuration [60].
The most promising topology is the FC, BT and SC combination. In this architecture, SCs are primarily used to manage transient power demands, including those associated with acceleration and braking. This ensures high performance and durability of the SCs, which are fully exploited and contribute to extending the lifespan of the BTs by minimizing their exposure to high-current charging and discharging cycles. The slower aging of the BTs presents a significant advantage of this topology. Moreover, this strategy does not necessitate voltage control of the SCs [7]. If the voltage of the SCs is high and the vehicle decelerates, then the BTs can absorb the energy generated from regenerative braking. Conversely, if the voltage of the SCs drops to their lower limit, BTs can supply the additional energy needed. Same situation happens when BT’s SoC is high, then SUC can absorb the energy generated from regenerative braking and when BT’s SoC is low, SUC can supply the additional energy needed [7,12].
There are four ways of connecting the BT and SC to the DC-link of the FCEV. This power source combination is proving to be the most challenging to research in literature, possibly due to its complexity, which makes it difficult to effectively document and compare the characteristics of each configuration. This indicates potential future research explosion in this field, as the technology involved becomes more readily available, and simulation capabilities increase.
- 5.
- BT and FC Parallel Direct Connection: In this topology, both the FC and the BT are directly connected to the DC-link, while the SC is connected through a bidirectional DC/DC converter [63], as depicted in Figure 10.a. The SC enhances energy recovery from regenerative braking, improving overall efficiency. The FC manages the average load, while the BT handles only high-power demands. This method requires a simple control strategy and features reduced complexity in power electronics. The direct connection of the FC is crucial for managing rapid changes in voltage and current in the DC bus [62]. However, the lack of control over the BT and FC does not explicitly yield the best efficiency from the power sources, and could potentially shorten their lifespan.
- 6.
- SC Parallel Direct Connection: In this topology, as shown at Figure 10.b both the FC and the BT are connected through DC/DC converters, with the BT being bidirectional, while the SC is directly connected to the DC-link [64]. In this arrangement, the BT captures energy from regenerative braking, and the SC provides immediate power for dynamic demands due to its direct connection, thus protecting the BT and FC. This setup integrates high power and high energy sources [59]. However, it involves more complex power electronics, while a sophisticated control strategy is required. The cost is higher than in the first topology, and the FC and BT might respond to load changes in delay [62].
- 7.
- BT Parallel Direct Connection: In this configuration, both the FC and the SC are connected through DC/DC converters, as depicted in Figure 11.a, with the SC being bidirectional, while the BT is directly connected to the DC-link [60]. The regenerative braking energy is captured by the SC and the lifespan of the FC is enhanced due to the stabilization that is provided by the DC/DC converter. The BT handles steady-state and low dynamic loads but experiences more stress due to the absence of a DC/DC converter [62].
- 8.
- Parallel Indirect Connection of BT, SC and FC: As presented Figure 11.a in this topology, all power sources are connected to the DC-link, with the SC and BT connected through a bidirectional converter [60]. This configuration allows for the most effective control of energy due to the management of all power sources, thereby improving overall system efficiency [51]. The system can dynamically balance power among the SoC of each power source and regulate the DC-link voltage [59]. For example, both BT and SC can support regenerative braking, depending on which source has the capacity to absorb it. Additionally, given the multiple power sources, in the event of a failure of one source, the system can maintain its performance. However, a highly sophisticated control strategy is required to effectively use this system, and it is the most cost-effective topology. Considering a multi-input converter, as in the Multi-Input Converter Configuration, is surmised to be worthwhile to undergo a financial analysis.
The last topology for FCEVs incorporates an FC and a FW Energy Storage System (FESS). This combination, as discussed in several sources [65], offers significant advantages. Firstly, the FC provides a stable power source, which is substantially augmented by the FESS's capacity to handle load variations, including energy recapture during vehicle decelerations [66]. This configuration facilitates a reduction in the overall size of the FC, optimizing the system for enhanced efficiency and cost-effectiveness [67]. Moreover, FESS provides a very high cycle life and efficiency, making it a reliable and effective partner for the FC in terms of operational readiness [68]. This setup not only boosts energy efficiency by managing transient energy demands effectively but also minimizes environmental impact due to its emission-free and chemical waste-free nature, which starkly contrasts with traditional BT systems [68].
Two distinct topologies are outlined in the archive:
At ref. [68], the hybrid powertrain topology includes an innovative arrangement where the FC is divided into multiple stacks as shown in Figure 12, each controlled independently to operate around its optimal efficiency point. This system is supported by a FESS that compensates for the slow dynamic response of the FC, efficiently managing power transients. The control strategy is designed to optimize energy efficiency by dynamically adjusting the number of active FC stacks based on the state of charge of the FESS. This approach allows for significant downsizing of the FESS while maintaining system responsiveness and efficiency. However, the increased complexity of the control strategy may lead to higher costs and potential maintenance challenges due to the sophisticated system requirements. Despite these challenges, the benefits in terms of energy efficiency, emission reduction, and operational adaptability make this topology a compelling choice for urban transit applications.
Ref. [67] details a sophisticated hybrid power system that integrates a hydrogen FC and a FESS as demonstrated in Figure 13. In this topology, the FC serves as the primary, steady source of electricity, converting hydrogen into power, while the FESS efficiently manages peak energy demands and captures energy during braking phases. The system includes power converters (C1) that facilitate the transfer and modulation of energy between the FC, FESS, and the in-wheel traction motors (MT) via power and control buses. This arrangement enhances overall efficiency by allowing the FC to operate continuously near its optimal efficiency point, with the FESS compensating for transient loads and smoothing out power delivery. The control system (CS) orchestrates the entire operation, ensuring that power distribution is dynamically managed according to real-time vehicle demands. This topology not only optimizes power usage, making the system more efficient and reducing operational costs, but also supports the vehicle's responsiveness and stability in urban transit scenarios, where frequent starts and stops is a common situation. Additionally, this setup supports environmental goals by maintaining zero emissions throughout its operation, contributing to cleaner urban air quality. However, the system's complexity and cost are elevated due to the sophisticated control systems required to manage the interactions between the FC and FESS, leading to higher initial investment and maintenance expenses. Technological maturity is another hurdle, as integrating these systems into commercial vehicles is completely untested and may encounter unforeseen technical challenges.
In general, the topologies involving FC and FW cannot be distinctly categorized like the previous configurations. To the best of the authors’ knowledge, there is a scarcity of published works that could support a well-defined categorization. More exploration into FC and FW combinations should be conducted, particularly for private, consumer-grade EVs. Additionally, investigating the integration of a transmotor into one of these topologies should yield interesting research insights.
5. Energy Management Algorithms for Multisource EVs
As previously mentioned, an EV powered by multiple energy sources requires their effective cooperation to achieve optimal autonomy, balance, and performance. This is facilitated through appropriate algorithms implemented in the energy management system.
5.1 Energy Management System (EMS)
A multisource EV is a nonlinear dynamic system with multiple objectives, including achieving optimal fuel economy while meeting the driver's needs, and reducing emissions. To maximize the performance of energy flow and the engines in conjunction with the energy storage network, a central unit is essential. This central unit, known as the Energy Management System (EMS), controls all functions of these various units [69]. Moreover, the EMS must adapt to each driver's behavior and the vehicle’s driving conditions relative to the SoC of the energy storage systems. Some fundamental functions of the EMS include:
- Electrical management: Manages the charging and discharging processes to avoid voltage and current inequalities between cells, tailored to the parameters of each energy storage system.
- Thermal management: Ensures the balance of temperature among cells, maintaining the correct operating temperature for all components.
5.2 Optimization Control Strategies of a Multisource EV
Choosing the EMS is crucial for efficiently powering the drivetrain system and providing the required power as demanded by the driver, while keeping the preservation of the SoC limits and the health status of the energy storage systems in mind. In the literature, various works have been written about the energy management of an EV powered by multiple energy sources [7,14,42,59,60].
The classification of EMS algorithms includes three major groups:
- Rule-based algorithms
- Optimization algorithms
- Artificial intelligence-based algorithms
Rule-based algorithms utilize deterministic or fuzzy rules. Although suitable for real-time applications, they are specifically designed for certain vehicle architectures and heavily rely on individual driving profiles to set rules and limits, leading to time-consuming development. Additionally, they do not allow for optimization, and the computational demands of the extensive fuzzy ruleset needed are too high for real-time application [57].
Most of the research is focused on optimization algorithms, both offline and online, because they can balance execution, safety, and performance. Execution is crucial as the EMS must operate in real time, ensuring that control variables are adjusted quicker than the dynamics of the disturbance inputs with limited computing resources, while staying robust to outliers in the ever-shifting search space during operation. Safety is paramount as the EMS must adhere to the system's physical limits, such as the maximum current of the BT or the maximum voltage of the SCs. Performance is necessary to ensure that the EMS is as close to the optimal solution as possible. These criteria are interdependent, leading to extensive studies to solve problems bound by real-time constraints. Among all methods, the Equivalent Cost Minimization Strategy (ECMS) is the most widely studied and applied [60].
Finally, artificial intelligence-based (AI-based) algorithms have faced significant development due to the growing capabilities of artificial intelligence and neural networks which results from the recent research focus. These systems use historical data, real-time sensor inputs, and environmental conditions to make adaptive decisions about energy distribution and drivetrain control. They offer advantages such as improved fuel economy, increased driving range for hybrid or electric vehicles, enhanced performance, and better driving capability compared to the previous mentioned algorithms. The adaptive control adjusts to the driving style of each driver and the current driving conditions, optimally utilizing regenerative braking and energy recovery systems [60].
5.3 Rule Based Algorithms
Rule-based algorithms for EMS in hybrid power systems are valued for their simplicity, reliability, and ease of implementation. These algorithms utilize predefined rules to manage the distribution of energy between various power sources and loads, ensuring both system stability and efficiency. A key advantage of these systems is their straightforward implementation, which supports real-time control and basic adaptability to changing power demands and conditions. For instance, ref. [71] demonstrated effective power allocation and DC-link voltage stabilization in a BT/SC hybrid energy storage system using a rule-based EMS, which operated without power sensors and relied solely on current estimations. Additionally, ref. [72] highlighted how these systems can extend component lifetimes by integrating SoC management and specifically avoiding overuse in the ruleset. However, as pointed out by [73], their lack of dynamic adjustment based on predictive analytics, as AI based algorithms are capable to do so, or optimization algorithms is a notable limitation, which can result in suboptimal performance under certain conditions. Despite these limitations, rule-based EMS remain popular due to their reliability, low computational requirements, and ease of implementation by the system designer.
5.3.1. Deterministic Rules
Deterministic rules are designed to enhance fuel economy, minimize losses, and reduce emissions by optimizing the performance mapping of electric motors. These rules are formulated based on the collection and analysis of data from past experiences, aiming to identify optimal operating points. Deterministic rules can be classified into optimal working condition-based methods and frequency-decoupling methods.
- Optimal working condition-based methods
Rule-based deterministic optimal working condition methods are widely used in various applications to ensure optimal performance and efficiency. These methods leverage predefined rules and conditions to control systems in a deterministic manner, ensuring consistent and predictable outcomes. For electric vehicles, an adaptive thermostat control method based on working condition prediction optimizes the operational power of auxiliary power units, enhancing BT life and reducing noise and vibration. Additionally, the development of electric vehicle control units using state machine deterministic rule-based approaches ensures optimal power and energy management by adapting to various driving conditions [74].
Thermostat strategy (ON/OFF): It maintains the SoC of the BT within predetermined limits and power splits effectively the energy through the HESS [59]. However, its major drawback is its inability to deliver the required power for all vehicle functions. This strategy is primarily used in series hybrid architectures and is suitable for city driving conditions, which involve frequent start-stop cycles [60].
State machine (multimode) strategy: This strategy operates in a specific given state of the vehicle through a decision tree algorithm based on constant conditions. This strategy is also known as the multimode strategy.
Hajer et al. [52] proposes a strategy for a FC and SC EV, aiming to enhance overall stability during transient states. The simulations were conducted in MATLAB-Simulink environment, and the findings suggest that this algorithm is easy to implement as well as robust enough for real-time applications. However, testing the algorithm in a real-world scenario would be necessary to confirm its effectiveness, as the maximum speed in the simulation was only 64.4 km/h, indicating a potential unexplored territory for this algorithm at non-urban speeds. Additionally, SoC of the SC was maintained between 20-80% to optimize lifespan, raising the question of how the system would perform under boundary conditions if deemed necessary in a more complex scheme. Investigating these conditions could reveal whether the system remains consistent under non-linear power demands and unpredictable EV behavior, which are common in real-world scenarios.
A state machine control algorithm was proposed to ensure efficient power distribution between the FC and the SC, and to protect the FC from overloading [72]. The algorithm successfully reduced input current ripple, increased efficiency, minimized the volume of the inductors, and ensured operation in degraded mode, with all these outcomes established through numerical simulations in MATLAB/Simulink. However, even though rule-based algorithms typically respond to current conditions, incorporating predictive elements, such as forecasting power demands based on driving patterns, could make the EMS more proactive and efficient. Future work could also validate these approaches experimentally to confirm their effectiveness in real-world scenarios, thereby enhancing the promise of this algorithm's practical implementation.
- 2.
- Frequency-Decoupling Method
In this strategy, the frequency of the load demand is divided into low and high frequency components. The frequency decoupling occurs through a low-pass filter, a high-pass filter, a sliding mean strategy, and wavelet transformation. The high-frequency component is supplied to the fast-acting power sources, while the low-frequency components are supplied to the slow-acting sources. A comprehensive review paper [5] discusses the use of EMS that aim to optimize power splitting through the employment of filters, typically low-pass filters, to manage the distinct power characteristics of BTs and SCs. However, the adaptability of the system is limited due to the constant frequency of the filter, which can impact the safety and efficiency of the power sources. To overcome these limitations, some studies have suggested the integration of rule-based strategies with other control methods, such as fuzzy logic and optimization algorithms, to enhance the efficiency, adaptability, and overall performance of the EMS.
5.3.2. Fuzzy-Logic
The fuzzy logic strategy is based on “if-then” rules. The effectiveness of this strategy depends on the appropriate choice of membership functions and the precise formulation of fuzzy rules. The advantage of this method is its robustness, regardless of the mathematical model, and its high adaptability. Fuzzy logic can be divided into three categories, as follows:
- 1.
- Basic Fuzzy Logic (BFL):
This subcategory includes systems that use basic fuzzy rules and membership functions without any advanced optimization or adaptivity features. It involves direct application of fuzzy arithmetic for making decisions based on broader input definitions.
Authors of [5,75] implement this kind of algorithm in a FC-SC EV in MATLAB/Simulink, with no real life experiment. Their results were very encouraging in city and preurban driving cycles, but in highway conditions, the implemented rules didn’t allow the total respect of the constraints which is a major disadvantage of fuzzy logic, as they also point out. An improvement can be accomplished if an optimization based off-line derivative genetic algorithm is implemented in the fuzzy algorithm in order to adjust the membership functions and fuzzy rules. Inclusion of BT in the system is also promising.
In ref. [50], a similar logic algorithm was employed in a BT and SC FCEV, and its performance was compared to a proportional integral derivative control (PID) method. The simulation results confirmed that the fuzzy logic controller significantly enhanced the optimization of the energy storage control strategy, improving both its dynamic and static characteristics. While the technical aspects of the EMS are comprehensively addressed, the discussion on the cost implications of integrating such systems into mass-produced vehicles is limited. Future research could beneficially include a detailed cost-benefit analysis to evaluate the manufacturing and operational costs associated with these systems. A promising fuzzy logic controller successfully extended BT life by reducing the BT current RMS value by 12% in a BEV equipped with SCs [76]. This work was validated through experimental proof and simulations, yielding encouraging results regarding the reduction of energy consumption in the EV. A cost analysis comparing the integration of SCs with the benefits of size reduction would further enhance this research.
- 2.
- Optimized Membership:
Fuzzy logic, when tuned by an optimization algorithm, is called optimized fuzzy logic. The membership function in optimized fuzzy logic is optimized by an algorithm such as the Dividing Rectangles (DIRECT), Particle Swarm Optimization (PSO), Genetic Algorithm (GA), and Bee Algorithm. This strategy is used to reduce fuel consumption, lessen emissions, maintain the BT’s SoC, and improve driving performance.
Authors of [77] present an energy management strategy for EVs equipped with FC and BTs, aiming to ensure a continuous power supply, optimize power distribution between the two sources, and enhance the vehicle’s overall performance. Although they achieved these objectives, the outcomes were not as of this time evaluated in a real-world scenario through experimentation. Additionally, the speed-time graphs covered only 60 seconds, and the maximum speed of the car was 30 km/h, which may raise questions about the reliability of the results in real world scenarios. The paper categorizes its use of fuzzy logic as an "AI system," suggesting a sophisticated application where the rules and membership functions are specifically tailored to manage the complexities of a hybrid energy system in electric vehicles. The optimization likely involves fine-tuning the fuzzy logic parameters to closely align with the specific characteristics and performance targets of the FC system.
In [78], a fuzzy logic control system, whose rule weights are optimized by the PSO algorithm to minimize BT current and power peak fluctuations, thereby enhancing its capacity and lifespan, is presented. The HESS is comprised of a BT and SC, and the EMS was simulated in MATLAB/Simulink with the GM EV1 vehicle model integrated into the ADVISOR platform. Comparative results show that the optimized Fuzzy Logic Controller (FLC) significantly lowers the BT temperature from 31°C to 25.5°C and reduces the peak BT current by 51%, from 240 A to 116.3 A. This minimizes thermal risks and mechanical stress on the BT, and improves the capacity fade of the BT, demonstrating a 5.4% better retention rate. However, the applicability of the optimized FLC and PSO might require adjustments for different vehicle models or energy storage configurations, highlighting a need for broader validation across various systems. Additionally, comparing the FLC with other optimization algorithms would be meaningful for future work, and it would be even more beneficial if all of these could be experimentally validated.
- 3.
- Adaptive Fuzzy Logic Control:
This strategy has the ability to self-adjust based on various power demands such as load current, battery voltage etc. [79]. It is configured by combining an artificial neural network and fuzzy logic. The adaptive neural fuzzy inference system can maximize fuel economy and maintain SoC within permissible limits. It requires prior knowledge or data. The review papers [5,14,80] discuss adaptive fuzzy logic-based EMS for EVs, emphasizing their role in optimizing power distribution between BT and SCs across different driving profiles. These systems utilize adaptive fuzzy strategies to enhance performance by dynamically adjusting to varying power demands, reducing BT strain, and maintaining system reliability. However, the effectiveness of these strategies is somewhat limited by their inability to incorporate variables like driver behavior and road conditions, which are crucial for enhancing prediction accuracy and overall system adaptability.
- 4.
- Predictive Fuzzy Logic Control:
This strategy predicts the state of the drive system and acts in real time. This process uses the Global Positioning System (GPS) to monitor the vehicle and determine the duration of the trip. Finally, the travel information is already known. No relevant research was found in the literature review conducted for this work, indicating a point of interest.
5.4 Optimization Based Algorithms
EMS optimization algorithms continuously search for the optimal solution based on an objective function and the constraints provided. Objective functions can be either maximized or minimized, depending on the quantity. However, the main goals of the cost function are to minimize fuel consumption, reduce emissions, and maintain the SoC of the BT within desired limits. The effectiveness of these algorithms in achieving these goals depends on previous data and information from the driving cycle. Optimization algorithms can be categorized offline and online.
5.4.1. Online Algorithms
An online strategy does not require prior knowledge of the driving cycle, nor does it guarantee optimized solutions for real-time adaptation. An example of an online learning strategy includes the Equivalent Consumption Minimization Strategy (ECMS) and the Model Predictive Control (MPC).
- 1.
- Equivalent Consumption Minimization Strategies (ECMS):
ECMS serves as an online application of Pontryagin's Minimum Principle (PMP) and is used in parallel topology of HEVs to maintain charge-sustaining conditions. This algorithm adapts PMP for local optimization, aiming to minimize equivalent fuel consumption. Otherwise, it can be based on reinforcement learning, aiming to different scopes [60].
Model Predictive Control Strategies (MPC):
MPC represents an improvement over Dynamic Programming (DP), which demands comprehensive prior information including road conditions, vehicle status, and trip duration—data that is often unrealistic to obtain comprehensively.
In reference [81], an adaptive MPC algorithm was validated in a FC-BT- SC EV. The algorithm was tested through simulation and experiment, resulting in reduced FC consumption and maintained peak current, which are promising outcomes for this algorithm. However, the overall scenario was limited to speeds below 50 km/h, and all power sources operated under ideal conditions. It would be beneficial to extend this research to non-urban speeds and investigate the lifespan of the power sources when operating under their boundary conditions, to better understand the robustness and applicability of the algorithm in more dynamic driving environments.
Authors in ref. [52] also utilized a predictive MPC in a BTEV equipped with SC. They achieved extended BT life through better power splitting and improved overall efficiency. Although the paper may be somewhat outdated, its outcomes remain significant. However, a newer version is essential, given that the experiments used lead-acid BTs. A comparison with modern control strategies, such as those based on machine learning, could yield interesting results.
In [82], three topologies were tested in an EV with two propulsion machines, where BT, UC, and FC combination achieved the longest All-Electric Range (AER), demonstrating the highest energy efficiency. The proposed optimization-based power split strategy is real-time implementable. However, it would be more beneficial to consider in the BT lifetime estimation the impacts of high/low temperatures and BT calendar aging effects.
- 2.
- Model Predictive Control Strategy with Differential Evolution:
The proposed strategy optimized power distribution between lithium-ion BTs and SC [83]. By minimizing power losses and stabilizing the DC bus voltage, they achieved an approximately 13% increment in the efficiency of the HESS. Additionally, optimizing the power split reduced stress on the BT, helping in extending its life and improving its performance. This strategy was compared to other control strategies and proved superior; it can be implemented online in EVs, a capability that was confirmed through simulation and experimentation. Future work could involve integrating machine learning algorithms or Vehicle-to-Everything (V2X) communication to predict the speed of the EV, refining the MPC algorithm to improve the prediction horizon and the accuracy of the energy demands.
Nonlinear MPC:
Authors of [84] utilized a NMPC, demonstrating significant improvements in instantaneous power capacity, BT stress reduction, and overall system efficiency. Due to the incorporation of this strategy with EV velocity, the proposed algorithm concerning vehicle prediction also fits well here and promises improved results compared to this work.
- 3.
- Others:
Robust Algorithm: Robust control is specifically designed to maintain performance in the presence of model inaccuracies and external disturbances.
Authors of [82] explored the implementation of a nonlinear control strategy for a FCEV with SC. The main goal was to achieve better DC bus voltage regulation, efficient reference tracking of FC and SC currents, and global stability of the system, objectives they successfully demonstrated through both simulation and experimentation. However, the effectiveness of the control strategy heavily depends on accurate mathematical modeling of the HESS components. Variations in parameters such as inductance, resistance, and capacitance values can significantly affect the control performance. This issue could potentially be addressed by employing machine learning approaches, which represent a promising direction for future research.
Multi-Mode Control (MMC)
Authors of [86] employed the Gray Wolf Optimization (GWO) algorithm within an MMC strategy to adjust weight coefficients for two optimization objectives: BT capacity degradation and energy loss in a BEV with SCs. They achieved significant reductions in BT capacity degradation—37.89% for aggressive driving styles and 21.95% for cautious driving styles. Additionally, energy loss in the HESS was considerably reduced by 56.11% and 12.45%, respectively. However, the study did not account for temperature variations during BT operation, a critical factor of degradation [87]. Furthermore, in the decision-making process for the NMC mode selection module, if the SoC lithium-ion BTs (SOClib) is lower than the SOClib_low limit, the power output from the BT and the SC is set to zero. While completely cutting off power can protect BT life, this approach could compromise passenger safety in real-world scenarios; thus, limiting rather than completely cutting off power might be a safer alternative. The method used to generate driving data, though creative, focused solely on urban conditions—highway conditions should also be included to broaden applicability. Specific simulation data details were not disclosed. Lastly, although the algorithm functions in real-time, it lacks adaptability to new data. Integrating adaptive control strategies could enhance the energy management system, making it more responsive and efficient.
These strategies highlight the complex interplay between real-time operational demands and the need for advanced control systems in modern energy management scenarios for vehicles.
5.4.2. Offline Algorithms
This EMS is non-causal and offers solutions applicable to multiple scenarios, but it requires information from previous states of the driving cycle. The power flow paths vary depending on the vehicle's topology. For instance, in a vehicle with a series topology, the optimization might focus on the energy required from the vehicle as the objective function. Conversely, in a vehicle with a parallel topology, the optimization might aim to minimize fuel consumption as the cost function. The constraints typically considered include power requirements, the BT’s SoC, and the vehicle's driving capabilities. The algorithm is designed to find a widely applicable solution for the sequence of gear changes or for distributing power between the ICE and the electric motor. The offline strategies are categorized into specific groups based on their application and methodology.
- 1.
- Direct Algorithms:
Direct algorithms are a well-known optimization approach in EMS, requiring prior knowledge about the vehicle's driving cycle, hence referred to as deterministic dynamic programming (DDP). An appropriate cost function is established at each step. The primary challenges associated with DDP include extensive computation time, the curse of dimensionality—which involves handling a multitude of variables to optimize the problem—and the necessity of prior information about the driving cycle.
Ref. [5] discusses the application of DDP in optimizing EMS for EVs with hybrid sources such as BTs and SCs. DDP approaches the optimization problem by dividing it into smaller segments over time, aiming to minimize a cost function at each discrete interval. Despite its theoretical benefits, DDP faces significant challenges in practical applications, including high computational demands and the inability to adapt in real-time including varying driving conditions, traffic, and load, which are crucial for extending BT life. The text references various studies that attempt to address these limitations by integrating DDP with other strategies or adapting it to different contexts, such as employing stochastic dynamic programming (SDP) to accommodate random driving profiles and traffic conditions. However, these methods still grapple with issues like high setup costs, complexity, and limited adaptability, hindering their widespread adoption in real-time EMS applications.
- 2.
- Derivative-Free Algorithms (DFAs)
DFAs are highly effective and useful when derivatives of the objective function are unavailable or indeterminable. DFAs can convert a solution into an optimized solution for broad use, contrasting with gradient algorithms, which tend to provide local solutions. Frequently mentioned DFAs in literature include simulated annealing (SA), genetic algorithms (GA), multi-objective GA (MOGA), particle swarm optimization (PSO), and direct algorithms. These strategies primarily employ stochastic methods that focus on selecting the best candidates and deriving solutions based on the objective function. However, due to their stochastic nature, methods like SA cannot ensure an optimized solution for broad applications. Additionally, the metaphorical process of repeated annealing—used to balance exploration and exploitation in the search space—can slow down the algorithm computationally. To mitigate these issues, engineers often use SA in conjunction with complementary algorithms such as rule-based, PMP, and GA.
Particle swarm optimization (PSO):
Authors of [88] present a robust framework for optimizing the sizing and cost of HESS in EVs powered by lithium-ion BTs and SCs using metaheuristic algorithms. Specifically, the PSO and Firefly Algorithm (FA) were used to determine the optimal configuration and cost-effective solution for the HESS, with the BMW i3 model used for validation in a MATLAB/Simulink environment. PSO demonstrated superior accuracy and computational efficiency compared to FA and the study highlighted a significant improvement in the sizing and cost of the HESS compared to conventional LIB-only systems, with approximately a 21% improvement in optimal sizing. However, the optimization process is static, meaning that the system’s performance could be impacted in unpredictable environments. Additionally, an experiment could establish their outcomes, which could be addressed in future work.
Genetic Algorithm (GA):
As paper [5] DFAs such as GAs solve optimization problems without derivatives by simulating evolutionary processes like reproduction, crossover, and mutation. These algorithms are useful for complex optimization issues, including nonlinear and time-based problems. Applications in EMS for EVs utilize GAs to optimize power management between hybrid sources such as FCs and BTs/SCs to enhance performance, reduce consumption, and stabilize power, though often overlooking the impact on BT lifecycle. Some other studies integrate fuzzy logic control with GA to minimize fluctuations and extend the lifespan of power sources, yet frequently fail to address long-term BT health, highlighting a gap in ensuring the safety and durability of the sources.
- 3.
- Indirect Algorithms:
Pontryagin's Minimum Principle (PMP) is a notable indirect algorithm. PMP optimizes solutions by fulfilling the necessary conditions outlined in the Hamilton-Jacobi Bellman equations. Its key feature is the ability to simplify a comprehensive optimization problem into a local Hamiltonian minimization issue. This method involves an iterative process across various driving cycles, with the main drawback being the high computational demand and the challenge of dimensionality.
Authors of [89] employed this strategy to optimize the distribution of propulsion power and regenerative braking energy between the BT and the SCs. The goal was to minimize electricity usage and maximize BT efficiency. Although specific details about the simulation environment were not provided—only that it was conducted on a computer interface—the percentages based on the final BT SoC values are considered questionable. Despite these concerns, the PMP-based strategy successfully reduced the BT’s RMS current, which is crucial for extending BT life.
In paper [90] a nonlinear optimization technique based on the Euler-Lagrange principle, a strategy that aligns with the variational principles used in PMP, was employed. The primary objective was to optimize the energy distribution between the FC and SC of a FCEV while maintaining the SoC of the SC. This goal was successfully achieved and validated through MATLAB/Simulink. Despite its obvious disadvantage of being an offline algorithm without real-time adaptability, an experiment could still validate the outcomes that were presented
In ref. [91], a Coyote Optimization Algorithm (COA)-based EMS was utilized in a HEV that combines FCs, BTs, and SCs with the main goal of reducing hydrogen consumption. Through simulations conducted in MATLAB/Simulink, they achieved a significant reduction in hydrogen usage, up to 59.86% less in grams, and enhanced the overall efficiency, reaching 81.29%, which is higher than that achieved by other traditional methods to which the authors compared their approach. This very promising work needs experimental validation in order to be applied in real-world scenarios and fully ascertain the practical applicability and robustness of the COA-based EMS.
- 4.
- Gradient Algorithms:
These algorithms are designed to reduce computation time and provide more robust optimization solutions. They utilize the derivative of the cost function, applying conditions such as differentiation and the Lipschitz condition, to address the optimization challenge. Types of gradient algorithms include Linear Programming (LP), Quadratic Programming (QP), Sequential QP (SQP), and Convex Programming (CP). LP is applied when both the objectives and constraints are linear, QP is suitable when objectives are quadratic and constraints are linear, and CP is employed for convex objective constraints and concave unequal constraints. In LP, the problem is structured as a convex non-linear issue with constraints emerging through a set of linear matrix inequalities. QP formulates a quadratic cost criterion subject to linear constraints, while CP considers simplified vehicle models to ease the complex convex nature of the optimization function, modeling the HEV with a series of quadratic equations [42].
Review paper [5] states that optimization algorithms are crucial in enhancing EMS for EVs with hybrid sources. These algorithms, which are gradient-based and often use derivatives of objective functions, aim to improve the robustness of solutions by ensuring continuity and differentiability. LP and QP are particularly notable; LP handles linear constraints and objectives, while QP deals with quadratic objectives. Research like that utilizes LP for efficient power allocation in hybrid systems, integrating strategies like online PID for dynamic control, despite challenges in defining optimal power sharing solutions. Another work on a QP-based EMS for BT-SCs systems highlights improvements in BT management but also underscores the exclusion of BT SoC, impacting overall BT safety and lifespan.
- 5.
- Other Algorithms:
An advanced EMS for a HESS combining solid-state lithium BTs and reversible FCs was presented in [92]. The proposed EMS algorithm integrated two optimization algorithms, the Chimp and the Levy Walk, aiming to optimize power distribution between these components to enhance overall efficiency, reliability, and lifespan of the system. Through numerical simulations in MATLAB/Simulink and tests on a laboratory power emulator, the EMS achieved a 19% improvement in BT lifetime compared to a mono-source system using a conventional high-power Lithium-Ion BT, while maintaining required power levels for both transient and steady-state scenarios, demonstrating its robustness and efficiency. However, while reversible FCs are described as a novel addition to HESS, it remains unclear whether the reversible function was utilized in the specific EMS, as this detail is not mentioned in the paper. For future work, demonstrating various driving profiles would help establish the adaptability of the EMS algorithm.
These diverse algorithmic strategies are integral to managing the complex energy demands of hybrid and electric vehicle systems, ensuring efficient operation while aiming to minimize environmental impacts.
5.5 Learning Based
The Learning-Based Energy Management System (LB EMS) utilizes comprehensive data analysis, incorporating both historical and real-time information. This system, while not requiring highly precise data, involves a labor-intensive process that typically extends the time required to deliver solutions. Its effectiveness is wholly contingent on the quality of data provided and the efficacy of the machine learning techniques employed.
- 1.
- Reinforcement Learning (RL):
In this method, an agent continuously interacts with its environment to collect model information at each instance. The agent's decisions, influenced by the adopted control policy, strive to maximize the expected cumulative reward over time, which can be optimized through adequate training. RL-based EMS has been effectively applied in series HEVs, PHEVs, and parallel topology HEVs.
The review paper [93] discusses the application of RL algorithms to manage the energy in HESS of EVs. It highlights that traditional rule-based and optimization algorithms, although beneficial, fall short in dynamically managing complex energy systems in real-time. RL is proposed as a superior alternative due to its ability to adapt and optimize energy management in response to changing conditions without requiring a predefined model. The paper elaborates on various RL strategies, their implementation in EVs, and the selection criteria for state and action spaces along with reward functions in RL-based EMS. This approach promises enhancements in the efficiency and performance of EVs by intelligently managing power flow and storage in HESS.
Authors of [94] proposed a Double Deep Q-Learning (DDQL) EMS strategy for a FCEV equipped with BTs. The primary goal was to optimize hydrogen consumption and extend the service life of the FC system by addressing the degradation effects on the FC. Using MATLAB/Simulink, they achieved better fuel economy, enhanced mean efficiency of the FC system, and improved performance in reducing FC degradation compared to traditional ECM-based strategies. Additionally, the DDQL-based EMS maintained the SoC of the lithium-ion BT within a stable range. For future work, it would be interesting to explore how the integration of a SC could further aid in reducing FC degradation or what effects might arise if it replaced the BT.
- 2.
- Supervised Learning
This approach involves training the algorithm on a dataset to refine its predictive accuracy and decision-making capabilities. The process continues until a pre-defined level of accuracy is attained, with the system adapting and correcting errors through continuous learning. The control algorithm processes the training data, utilizing specified parameters to accurately simulate the desired performance
In reference [95], a novel and effective concurrent learning (CL)-based energy management strategy for HESS in PHEVs was presented. The CL-based method was compared to the Deep Deterministic Policy Gradient (DDPG). The CL-based approach required significantly less training time compared to DDPG, achieving a 90.77% reduction in training time, which indicates a major improvement in convergence speed and computational efficiency, especially important for EV applications. Simulations conducted using MATLAB/Simulink showed a reduction in energy loss by 17.3% during training and 18.7% during validation compared to the DDPG-based method. These results are very encouraging, particularly for real-time applications, but they also require experimental validation. Additionally, as the authors also mentioned that future work on the effects of component sizing on performance and upgrades in vehicle model quality is necessary.
Neural Network Learning (NNL):
Neural networks simulate the functioning of human neural pathways, linking numerous neurons across multiple layers to form an intricate network capable of executing a wide array of behaviors. Parameters within these networks are adjusted to achieve the desired outputs. Specific applications include the Elman neural network, which is utilized to maintain the SoC of BTs, and backpropagation neural networks, which are commonly applied in HEVs.
In ref. [96], a Supervised Artificial Neural Network, trained with results from convex optimization, was proposed for a BEV equipped with a BT and a FC. A feedforward neural network, specifically a Multi-Layer Perceptron (MLP), was utilized, managing to extend the estimated BT life by 4.2 years—a highly encouraging result for the BT’s lifespan and improve the overall efficiency of the vehicle. However, this algorithm cannot perform online in the EV, meaning it cannot adjust its weights with new data collected during vehicle operation, a limitation that presents an interesting opportunity for future research.
- 3.
- Unsupervised Learning:
This technique aims to infer general rules from data without specific outcomes, focusing on reducing redundancy and organizing data more efficiently. It does not typically have a direct objective function, rather it aims to uncover the underlying structures of the data [97].
In [98], an advanced EMS for FCHEVs was developed, incorporating driving behavior recognition to optimize power distribution among fuel cells, batteries, and ultracapacitors. This strategy aimed to enhance fuel efficiency, reduce hydrogen consumption, and extend the lifespan of the power sources. An adaptive soft deep Q-learning algorithm was employed to learn optimal power distribution based on driving behavior, while an adaptive ECMS dynamically adjusted the equivalent factors based on driving patterns to optimize energy usage. An unsupervised clustering method was used to identify and classify different driving behaviors, complemented by a heuristic self-learning labeling algorithm that accurately labeled and recognized driving behaviors. This complex system, requiring extensive data, achieved a 49.9% reduction in hydrogen consumption and a 31.4% total cost reduction compared to the benchmark ECMS method. The unsupervised learning component specifically focused on learning driving behavior, potentially categorizing the system as potentially hybrid.
Tzu-Chia Chen et al. [99] explore various machine learning techniques for optimizing energy management in HESS in EVs. They specifically discuss k-nearest neighbors’ algorithm (K-means), a clustering-based algorithms used to identify distinct driving patterns, enabling more tailored energy management strategies. This approach allowed for better adaptation of the HESS to varying driving conditions. Additionally, a technique called Principal Component Analysis (PCA) was employed to reduce the dimensionality of the data while preserving most of the variance by filtering out noise. Although PCA shows promise, interpreting high-dimensional data remains challenging.
- 4.
- Hybrid
In the scope of this review paper a new category of EMS algorithms is proposed. Hybrid algorithms combine two or more of the previously mentioned algorithms or optimization techniques and usually achieve better overall performance. In the review paper [100], more of this hybrid algorithms are mentioned, and described as combined.
A control strategy combining wavelet transform, neural networks, and fuzzy logic was employed to optimize power allocation between the BT and SC in real time [101]. The Neural Network Model (NNM) was initially trained offline using a dataset derived from the wavelet transform, after which a fuzzy logic-based supervisory controller was developed to maintain SC voltage within a specified range. Through robust simulation and well-established experimental validation, this strategy achieved a 30.66% improvement in energy efficiency. Additionally, the BT’s life cost was reduced by 18%, and 44.22% more regenerative braking energy was recovered compared to conventional filtration-based control strategies. Comparative studies with more hybrid algorithms could further validate the superiority of this specific approach.
In paper [102], a novel and effective Learning-based Robust Model Predictive Control (LRMPC) was proposed for a FCEV equipped with BTs. LRMPC utilizes machine learning models trained offline to create precise state observers for the SoC of the BT and to facilitate MPC for state prediction and control in real-time. Additionally, a deep forest algorithm was employed to predict future EV speed. This combination demonstrated superior energy-saving potential and robust real-time application capabilities compared to traditional MPC, validated through simulations using MATLAB/Simulink. The results indicated reduced hydrogen consumption and improved SoC management of the BT under various driving conditions. If the above work were validated in a real experimental scenario, it could represent a very encouraging development towards establishing the implementation of a HESS.
The review paper [100] mentions several hybrid algorithms, described as combined methods. It highlights the use of DP for strategy learning, specifically noting improvements in fuel economy through terrain-informed deep reinforcement learning (DRL) strategies. The paper also details various real-time EMS approaches, such as the model predictive control (MPC) for power sharing between FCs and BTs, and the integration of MPC with radial basis function neural networks (RBF-NN) to minimize costs associated with BT degradation and fuel consumption. These models employ advanced predictive algorithms, although they face challenges in maintaining accuracy under variable driving conditions. Further innovations in velocity prediction are explored through methods like particle swarm optimization and vehicle-to-vehicle (V2V) communications to adapt to sudden traffic changes. The overall emphasis is on leveraging the strengths of diverse methodologies to achieve optimized, flexible, and cost-effective energy management solutions for EVs, acknowledging the ongoing need for improvements in predictive accuracy and real-time adaptability.
The continual advancement in EMS technologies underscores the critical importance of integrating cutting-edge algorithms to optimize energy usage and operational efficiency in hybrid and electric vehicles.
6. Conclusions
This comprehensive review has explored the integration and optimization of multisource EVs with HESS, shedding light on various topologies and control algorithms that enhance the operational efficiency and energy management of these vehicles. The analysis underscored the critical role of combining multiple energy storage technologies—such as BTs, FCs, SCs, and FWs—to address the inherent limitations of single-source systems in EVs, in an intelligent and comprehensive way.
The study demonstrated how hybrid configurations can significantly extend the range and durability of EVs while minimizing environmental impact. Each component within the HESS brings unique benefits, balancing energy density with power density to meet the dynamic demands of vehicle operation. This balance is crucial for improving the overall performance and sustainability of EVs, and is surmised to be the focus of future work in this domain.
Particularly noteworthy is the transformative potential of the transmotor technology in HESS configurations. This innovative component has been proved to significantly improve the energy transfer efficiency between different storage systems, such as BTs and FWs. By facilitating direct mechanical-to-electrical energy conversion, transmotors reduce energy losses and enhance vehicle performance during high-demand scenarios like acceleration and deceleration. The application of transmotors also opens new paths for real-time control and energy flow management in multisource EVs, ensuring optimal utilization of each component's strengths.
Looking forward, exploring cutting-edge materials and technologies for HESS could significantly enhance their capacity and longevity. Specifically, scaling up green hydrogen production using renewable energy sources makes FCs highly promising. Integrating multisource EVs with renewable energy sources could boost the sustainability of the transportation sector by eliminating the fossil fuel requirements of ICEs. Regarding transmotor technology, further research into control algorithms and their integration with vehicle speed estimation algorithms presents a promising direction. Additionally, there appears to be a research gap in topologies combining FCs with FWs, so more research in this area, especially incorporating transmotor applications, could be promising.
As multisource EVs evolve, implementing advanced machine learning techniques for predictive energy management could revolutionize how these systems adapt to user behavior and environmental changes. Many papers suggest that vehicle speed estimation will significantly improve existing algorithms. Additionally, Vehicle-to-Everything (V2X) communication, which enables interaction with other vehicles, infrastructure, networks, and pedestrians, could provide real-time data crucial for predictive algorithms. This integration may lead to more precise and efficient control strategies, adapting to various driving conditions and thereby maximizing energy conservation and performance of EVs. Especially, exploring Vehicle-to-Grid (V2G) technologies could reveal how multisource EVs might interact with the grid, providing energy storage solutions that help stabilize and increase renewable energy sources integration. As individual components of their application evolve, such as computational power, network architectures, and data acquisition, works that continuously explore and reevaluate the AI space are highly valuable.
As the automotive industry continues to evolve, the deployment of multisource EVs equipped with HESS will play a pivotal role in achieving a sustainable transportation ecosystem. Future research should also consider the economic aspects of these technologies, ensuring that they are cost-effective and accessible to a broader market. By advancing these technologies and exploring new integrations, we can move closer to realizing the full potential of electric vehicles in a low-carbon world.
Author Contributions
Conceptualization, N.F. and A.K.; methodology, N.F.; validation, G.F., I.P. and A.K.; formal analysis, A.K.; resources, N.F. and I.P.; writing—original draft preparation, N.F.; writing— review and editing, N.F., G.F., G.E.L.; and A.K.; visualization, G.E.L.; supervision, A.K.; project administration, A.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Denton, T. Electric and Hybrid Vehicles; 711 Third Avenue, New York, 2016. [CrossRef]
- Stephanie Brinley US EV Sales Grew Nearly 52% in 2023. So Why Are Automakers Slowing EV Investments? Available online: https://www.spglobal.com/mobility/en/research-analysis/us-ev-sales-grew-nearly-52-in-2023.html (accessed on 1 August 2024).
- Jerry A. Madrid Electric and Hybrid Vehicle Battery Technologies: Advancements and Challenges. International Journal of Advanced Research in Science, Communication and Technology 2023, 803–807, doi:10.48175/ijarsct-11960. [CrossRef]
- Larminie, James.; Lowry, J. Electric Vehicle Technology Explained; 2nd ed.; John Wiley & Sons: The Atrium, Southern Gate, Chichester, West Sussex, PO19 8SQ, United Kingdom, 2012; ISBN 9781119942733.
- Verma, S.; Mishra, S.; Gaur, A.; Chowdhury, S.; Mohapatra, S.; Dwivedi, G.; Verma, P. A Comprehensive Review on Energy Storage in Hybrid Electric Vehicle. Journal of Traffic and Transportation Engineering (English Edition) 2021, 8, 621–637. [CrossRef]
- Xie, Y.; Zhao, X.; Cai, W.; Qi, G.; Wang, Z.; Zhang, Y.; Yang, Y. Design and Optimisation of Oil Injection Pipe Cooling Structure for Permanent Magnet Synchronous Motors in Hybrid Electric Vehicles. IET Electr Power Appl 2024, 18, 345–355, doi:10.1049/elp2.12393. [CrossRef]
- Bauman, J.; Kazerani, M. A Comparative Study of Fuel-Cell-Battery, Fuel-Cell-Ultracapacitor, and Fuel-Cell-Battery-Ultracapacitor Vehicles. IEEE Trans Veh Technol 2008, 57, 760–769, doi:10.1109/TVT.2007.906379. [CrossRef]
- Khaligh, A.; Li, Z. Battery, Ultracapacitor, Fuel Cell, and Hybrid Energy Storage Systems for Electric, Hybrid Electric, Fuel Cell, and Plug-in Hybrid Electric Vehicles: State of the Art. IEEE Trans Veh Technol 2010, 59, 2806–2814, doi:10.1109/TVT.2010.2047877. [CrossRef]
- Farrokhzad Ershad, N.; Mehrjardi, R.T.; Ehsani, M. Electro-Mechanical EV Powertrain with Reduced Volt-Ampere Rating. IEEE Trans Veh Technol 2019, 68, 224–233, doi:10.1109/TVT.2018.2881385. [CrossRef]
- Tie, S.F.; Tan, C.W. A Review of Energy Sources and Energy Management System in Electric Vehicles. Renewable and Sustainable Energy Reviews 2013, 20, 82–102. [CrossRef]
- Salmasi, F.R. Control Strategies for Hybrid Electric Vehicles: Evolution, Classification, Comparison, and Future Trends. IEEE Trans Veh Technol 2007, 56, 2393–2404, doi:10.1109/TVT.2007.899933. [CrossRef]
- Doucette, R.T.; McCulloch, M.D. A Comparison of High-Speed Flywheels, Batteries, and Ultracapacitors on the Bases of Cost and Fuel Economy as the Energy Storage System in a Fuel Cell Based Hybrid Electric Vehicle. J Power Sources 2011, 196, 1163–1170, doi:10.1016/j.jpowsour.2010.08.100. [CrossRef]
- Ju, F.; Zhang, Q.; Deng, W.; Li, J. Review of Structures and Control of Battery-Supercapacitor Hybrid Energy Storage System for Electric Vehicles; 2014; ISBN 9781479952830. [CrossRef]
- Sulaiman, N.; Hannan, M.A.; Mohamed, A.; Majlan, E.H.; Wan Daud, W.R. A Review on Energy Management System for Fuel Cell Hybrid Electric Vehicle: Issues and Challenges. Renewable and Sustainable Energy Reviews 2015, 52, 802–814. [CrossRef]
- Hannan, M.A.; Hoque, M.M.; Mohamed, A.; Ayob, A. Review of Energy Storage Systems for Electric Vehicle Applications: Issues and Challenges. Renewable and Sustainable Energy Reviews 2017, 69, 771–789. [CrossRef]
- Habib, A.K.M.A.; Hasan, M.K.; Mahmud, M.; Motakabber, S.M.A.; Ibrahimya, M.I.; Islam, S. A Review: Energy Storage System and Balancing Circuits for Electric Vehicle Application. IET Power Electronics 2021, 14, 1–13. [CrossRef]
- Energy Agency, I. Review 2021 Assessing the Effects of Economic Recoveries on Global Energy Demand and CO 2 Emissions in 2021 Global Energy; 2021;
- Iqbal, M.; Benmouna, A.; Becherif, M.; Mekhilef, S. Survey on Battery Technologies and Modeling Methods for Electric Vehicles. Batteries 2023, 9. [CrossRef]
- Piatkowski, P.; Michalska-Pozoga, I.; Szczepanek, M. Fuel Cells in Road Vehicles. Energies (Basel) 2022, 15, doi:10.3390/en15228606. [CrossRef]
- Salado, M.; Gonçalves, R.; Costa, C.M.; Lanceros-Méndez, S. Lithium-Ion Batteries: Electrodes, Separators, and Solid Polymer Electrolytes. In Sustainable Energy Storage in the Scope of Circular Economy: Advanced Materials and Device Design; John Wiley and Sons Ltd, 2023; pp. 43–68 ISBN 9781119817703.
- Xia, Q.; Ren, Y.; Wang, Z.; Yang, D.; Yan, P.; Wu, Z.; Sun, B.; Feng, Q.; Qian, C. Safety Risk Assessment Method for Thermal Abuse of Lithium-Ion Battery Pack Based on Multiphysics Simulation and Improved Bisection Method. Energy 2023, 264, doi:10.1016/j.energy.2022.126228. [CrossRef]
- KURTULMUŞ, Z.N.; KARAKAYA, A. Review of Lithium-Ion, Fuel Cell, Sodium-Beta, Nickel-Based and Metal-Air Battery Technologies Used in Electric Vehicles. International Journal of Energy Applications and Technologies 2023, 10, 103–113, doi:10.31593/ijeat.1307361. [CrossRef]
- Bhuvana, J.; Pandeya, M.; Vishnoi, R. Emerging Battery Technologies for High-Power Electric Vehicles. In Proceedings of the 2024 International Conference on Optimization Computing and Wireless Communication, ICOCWC 2024; Institute of Electrical and Electronics Engineers Inc., 2024.
- Khan, M. Innovations in Battery Technology: Enabling the Revolution in Electric Vehicles and Energy Storage. British Journal of Multidisciplinary and Advanced Studies 2024, 5, 23–41, doi:10.37745/bjmas.2022.0414. [CrossRef]
- Lü, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy Management of Hybrid Electric Vehicles: A Review of Energy Optimization of Fuel Cell Hybrid Power System Based on Genetic Algorithm. Energy Convers Manag 2020, 205. [CrossRef]
- Meyers, R.A.; Elgowainy, A. Encyclopedia of Sustainability Science and Technology Series Editor-in-Chief: A Volume in the Encyclopedia of Sustainability Science and Technology, Second Edition Electric, Hybrid, and Fuel Cell Vehicles; Palm Desert, CA, USA, 2021.
- Deb, N.; Alam, M.Z.; Rahman, T.; Jami, M.S.; Bt. Mansor, M.F.; Tajuddin, H.B.A. Design and Analysis of a Fuel Cell and Batteries in Energy Production for Electric Vehicle. Iranian Journal of Energy and Environment 2023, 14, 301–313, doi:10.5829/ijee.2023.14.03.11. [CrossRef]
- De Wolf, D.; Smeers, Y. Comparison of Battery Electric Vehicles and Fuel Cell Vehicles. World Electric Vehicle Journal 2023, 14, doi:10.3390/wevj14090262. [CrossRef]
- Xu, Z. Hydrogen Fuel-Cell Technology in Electric Vehicles: Current Usage, Materials and Future Applications; 2022; Vol. 2022. [CrossRef]
- Wang, Y.; Leung, D.Y.C.; Xuan, J.; Wang, H. A Review on Unitized Regenerative Fuel Cell Technologies, Part-A: Unitized Regenerative Proton Exchange Membrane Fuel Cells. Renewable and Sustainable Energy Reviews 2016, 65, 961–977. [CrossRef]
- Sharma, S.; Panwar, A.K.; Tripathi, M.M. Storage Technologies for Electric Vehicles. Journal of Traffic and Transportation Engineering (English Edition) 2020, 7, 340–361. [CrossRef]
- Kularatna, N.; Subasinghage, K.; Gunawardane, K.; Jayananda, D.; Ariyarathna, T. Supercapacitor-Assisted Techniques and Supercapacitor-Assisted Loss Management Concept: New Design Approaches to Change the Roadmap of Power Conversion Systems. Electronics (Switzerland) 2021, 10. [CrossRef]
- Şahin, M.E.; Blaabjerg, F. A Hybrid PV-Battery/Supercapacitor System and a Basic Active Power Control Proposal in MATLAB/Simulink. Electronics (Switzerland) 2020, 9, doi:10.3390/electronics9010129. [CrossRef]
- Makuwatsine, T.T.; Gill, A.; Gupta, S.; Chauhan, S. Supercapacitor and Battery Hybrid Energy Storage System for Electric Vehicle. In Proceedings of the 2023 3rd Asian Conference on Innovation in Technology, ASIANCON 2023; Institute of Electrical and Electronics Engineers Inc., 2023.
- Rajagopal, S.; Pulapparambil Vallikkattil, R.; Mohamed Ibrahim, M.; Velev, D.G. Electrode Materials for Supercapacitors in Hybrid Electric Vehicles: Challenges and Current Progress. Condens Matter 2022, 7. [CrossRef]
- Tundwal, A.; Kumar, H.; Binoj, B.J.; Sharma, R.; Kumar, G.; Kumari, R.; Dhayal, A.; Yadav, A.; Singh, D.; Kumar, P. Developments in Conducting Polymer-, Metal Oxide-, and Carbon Nanotube-Based Composite Electrode Materials for Supercapacitors: A Review. RSC Adv 2024, 14, 9406–9439. [CrossRef]
- Laadjal, K.; Marques Cardoso, A.J. A Review of Supercapacitors Modeling, SoH, and SoE Estimation Methods: Issues and Challenges. Int J Energy Res 2021, 45, 18424–18440. [CrossRef]
- Li, H.; Chu, J.; Sun, S. High-Performance Flywheel Hybrid Powertrain. Sustainability (Switzerland) 2022, 14, doi:10.3390/su14138076. [CrossRef]
- Amiryar, M.E.; Pullen, K.R.; Nankoo, D. Development of a High-Fidelity Model for an Electrically Driven Energy Storage Flywheel Suitable for Small Scale Residential Applications. Applied Sciences (Switzerland) 2018, 8, doi:10.3390/app8030453. [CrossRef]
- Ehsani, M.; Singh, K.V.; Bansal, H.O.; Mehrjardi, R.T. State of the Art and Trends in Electric and Hybrid Electric Vehicles. Proceedings of the IEEE 2021, 109, 967–984, doi:10.1109/JPROC.2021.3072788. [CrossRef]
- Lin, Z.; Li, D.; Zou, Y. Energy Efficiency of Lithium-Ion Batteries: Influential Factors and Long-Term Degradation. J Energy Storage 2023, 74, doi:10.1016/j.est.2023.109386. [CrossRef]
- Lü, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy Management of Hybrid Electric Vehicles: A Review of Energy Optimization of Fuel Cell Hybrid Power System Based on Genetic Algorithm. Energy Convers Manag 2020, 205. [CrossRef]
- Verma, S.; Mishra, S.; Gaur, A.; Chowdhury, S.; Mohapatra, S.; Dwivedi, G.; Verma, P. A Comprehensive Review on Energy Storage in Hybrid Electric Vehicle. Journal of Traffic and Transportation Engineering (English Edition) 2021, 8, 621–637. [CrossRef]
- Holtkamp, M.; Alonso, G. RAQ Issue 179: Energy Storage Using Supercapacitors: How Big Is Big Enough?; 2020; Vol. 54;.
- Tafazzoli Mehrjardi, R.; Ershad, N.F.; Ehsani, M. Transmotor-Based Powertrain for High-Performance Electric Vehicle. IEEE Transactions on Transportation Electrification 2020, 6, 1199–1210, doi:10.1109/TTE.2020.2995872. [CrossRef]
- Ershad, N.F.; Mehrjardi, R.; Ehsani, M. Development of a Kinetic Energy Recovery System Using an Active Electromagnetic Slip Coupling. IEEE Transactions on Transportation Electrification 2019, 5, 456–464, doi:10.1109/TTE.2019.2891045. [CrossRef]
- Mehrjardi, R.T.; Ershad, N.F.; Ehsani, M. Transmotor-Flywheel Powertrain Assisted by Ultracapacitor. IEEE Transactions on Transportation Electrification 2022, 8, 3686–3695, doi:10.1109/TTE.2022.3152793. [CrossRef]
- Ershad, N.F.; Mehrjardi, R.T.; Ehsani, M. Efficient Flywheel-Based All-Wheel-Drive Electric Powertrain. IEEE Transactions on Industrial Electronics 2021, 68, 5661–5671, doi:10.1109/TIE.2020.2992942. [CrossRef]
- Raghuwanshi, A.; Ojha, A. An Overview of the Regenerative Braking Technique and Energy Storage Systems in Electric, Hybrid, and Plug-In Hybrid Electric Vehicles. In Proceedings of the 2023 IEEE International Students’ Conference on Electrical, Electronics and Computer Science, SCEECS 2023; Institute of Electrical and Electronics Engineers Inc., 2023.
- Sayed, K.; Abdel-Khalek, S.; Zakaly, H.M.H.; Aref, M. Energy Management and Control in Multiple Storage Energy Units (Battery–Supercapacitor) of Fuel Cell Electric Vehicles. Materials 2022, 15, doi:10.3390/ma15248932. [CrossRef]
- IEEE Staff 2017 IEEE Transportation Electrification Conference and Expo (ITEC).; IEEE, 2017; ISBN 9781509039531.
- Hredzak, B.; Agelidis, V.G.; Jang, M. A Model Predictive Control System for a Hybrid Battery-Ultracapacitor Power Source. IEEE Trans Power Electron 2014, 29, 1469–1479, doi:10.1109/TPEL.2013.2262003. [CrossRef]
- Ehsani Mehrdad; Gao Yimin; Longo Stefano; Ebrahimi Kambiz Modern Electric, Hybrid Electric, and Fuel Cell Vehicles Third Edition; 2018.
- Dhand, A.; Pullen, K. Analysis of Dual Mode Continuously Variable Transmission for Flywheel Energy Storage Systems. In Proceedings of the SAE Technical Papers; SAE International, April 5 2016; Vol. 2016-April.
- Dhand, A.; Pullen, K. Analysis of Continuously Variable Transmission for Flywheel Energy Storage Systems in Vehicular Application. Proc Inst Mech Eng C J Mech Eng Sci 2015, 229, 273–290, doi:10.1177/0954406214533096. [CrossRef]
- Dhand, A.; Pullen, K. Optimal Energy Management for a Flywheel-Assisted Battery Electric Vehicle. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering 2015, 229, 1672–1682, doi:10.1177/0954407014567720. [CrossRef]
- Marzougui, H.; Kadri, A.; Bacha, F. Rule-Based Power Sharing Strategy for a Fuel Cell-Supercapacitor Vehicle. In Proceedings of the 2021 IEEE 2nd International Conference on Signal, Control and Communication, SCC 2021; Institute of Electrical and Electronics Engineers Inc., 2021; pp. 113–118.
- Li, M.; Yu, P.; Wang, Y.; Sun, Z.; Chen, Z. Topology Comparison and Sensitivity Analysis of Fuel Cell Hybrid Systems for Electric Vehicles. IEEE Transactions on Transportation Electrification 2023, 9, 5111–5121, doi:10.1109/TTE.2022.3218341. [CrossRef]
- Kasimalla, V.K.R.; Naga Srinivasulu, G.; Velisala, V. A Review on Energy Allocation of Fuel Cell/Battery/Ultracapacitor for Hybrid Electric Vehicles. Int J Energy Res 2018, 42, 4263–4283. [CrossRef]
- Yu, P.; Li, M.; Wang, Y.; Chen, Z. Fuel Cell Hybrid Electric Vehicles: A Review of Topologies and Energy Management Strategies. World Electric Vehicle Journal 2022, 13. [CrossRef]
- Kök, C.; Mert, S.O. Energetic and Exergetic Performance Investigation of Different Topologies for Hybrid Fuel Cell Vehicles. Int J Energy Res 2023, 2023, doi:10.1155/2023/7165382. [CrossRef]
- Ragab, A.; Marei, M.I.; Mokhtar, M. Comprehensive Study of Fuel Cell Hybrid Electric Vehicles: Classification, Topologies, and Control System Comparisons. 2023, doi:10.20944/preprints202310.1459.v1. [CrossRef]
- Xie, C.; Xu, X.; Bujlo, P.; Shen, D.; Zhao, H.; Quan, S. Fuel Cell and Lithium Iron Phosphate Battery Hybrid Powertrain with an Ultracapacitor Bank Using Direct Parallel Structure. J Power Sources 2015, 279, 487–494, doi:10.1016/j.jpowsour.2015.01.029. [CrossRef]
- Gao, D.; Jin, Z.; Lu, Q. Energy Management Strategy Based on Fuzzy Logic for a Fuel Cell Hybrid Bus. J Power Sources 2008, 185, 311–317, doi:10.1016/j.jpowsour.2008.06.083. [CrossRef]
- Kuo, J.K.; Hsieh, H.K. Research of Flywheel System Energy Harvesting Technology for Fuel Cell Hybrid Vehicles. Fuel Cells 2013, 13, 1234–1241, doi:10.1002/fuce.201300129. [CrossRef]
- Hearn’, C.S.; Flynn’, M.M.; Lewis’, M.C.; Thompson’, R.C.; Murphy’, B.T.; Longoria2, R.G. Low Cost Flywheel Energy Storage for a Fuel Cell Powered Transit Bus; 2007;
- D’Ovidio G.; Masciovecchio C.; Rotondale N. City Bus Powered by Hydrogen Fuel Cell and Flywheel Energy Storage System; IEEE International Electric Vehicle Conference: Florence, Italy, 2014; ISBN 9781479960750.
- Gino D’Ovidio; Carlo Masciovecchio; Antonio Ometto; Carlo Villante On Design of Hybrid Power Unit with Partitioned Fuel-Cell and Flywheel Energy Sorage System for City Transit Buses; International Symposium on Power Electronics, Electrical Drives, Automation and Motion, 2020; ISBN 9781728170190.
- Rimpas, D.; Kaminaris, S.D.; Aldarraji, I.; Piromalis, D.; Vokas, G.; Papageorgas, P.G.; Tsaramirsis, G. Energy Management and Storage Systems on Electric Vehicles: A Comprehensive Review. Mater Today Proc 2022, 61, 813–819, doi:10.1016/j.matpr.2021.08.352. [CrossRef]
- Rimpas, D.; Kaminaris, S.D.; Aldarraji, I.; Piromalis, D.; Vokas, G.; Papageorgas, P.G.; Tsaramirsis, G. Energy Management and Storage Systems on Electric Vehicles: A Comprehensive Review. Mater Today Proc 2022, 61, 813–819, doi:10.1016/j.matpr.2021.08.352. [CrossRef]
- Farrokhi, E.; Safari, P.; Ghoreishy, H. A Rule-Based Energy Management Strategy with Current Estimation for Controlling Grid Connected Hybrid Energy Storage System. In Proceedings of the 2023 14th Power Electronics, Drive Systems, and Technologies Conference, PEDSTC 2023; Institute of Electrical and Electronics Engineers Inc., 2023.
- Barhoumi, N.; Marzougui, H.; Bacha, F.; Boukhnifer, M. Energy Management Algorithm of Fuel Cell/Supercapacitor System for Electrical Vehicle. In Proceedings of the 2022 8th International Conference on Control, Decision and Information Technologies, CoDIT 2022; Institute of Electrical and Electronics Engineers Inc., 2022; pp. 1415–1420.
- Kraa, O.; Boualem, S.; Kermadi, M. Flow-Chart Power Management for Grid-Connected Hybrid System. EEA - Electrotehnica, Electronica, Automatica 2023, 71, 75–82, doi:10.46904/eea.23.71.1.1108008. [CrossRef]
- Moulik, B.; Söffker, D. Optimal Rule-Based Power Management for Online, Real-Time Applications in Hevs with Multiple Sources and Objectives: A Review. Energies (Basel) 2015, 8, 9049–9063. [CrossRef]
- Hajji, B.; Mellit, A.; Marco Tina, G.; Rabhi, A.; Launay, J.; Eddine Naimi Editors, S. Proceedings of the 2nd International Conference on Electronic Engineering and Renewable Energy Systems; Saidia, Morocco, 2020;
- Trovao, J.P.F.; Roux, M.A.; Menard, E.; Dubois, M.R. Energy- and Power-Split Management of Dual Energy Storage System for a Three-Wheel Electric Vehicle. IEEE Trans Veh Technol 2017, 66, 5540–5550, doi:10.1109/TVT.2016.2636282. [CrossRef]
- Belkhier, Y.; Oubelaid, A.; Shaw, R.N. Hybrid Power Management and Control of Fuel Cells-Battery Energy Storage System in Hybrid Electric Vehicle under Three Different Modes. Energy Storage 2024, 6, doi:10.1002/est2.511. [CrossRef]
- Omakor, J.; Alzayed, M.; Chaoui, H. Particle Swarm-Optimized Fuzzy Logic Energy Management of Hybrid Energy Storage in Electric Vehicles. Energies (Basel) 2024, 17, doi:10.3390/en17092163. [CrossRef]
- Chen, J.; Xu, C.; Wu, C.; Xu, W. Adaptive Fuzzy Logic Control of Fuel-Cell-Battery Hybrid Systems for Electric Vehicles. IEEE Trans Industr Inform 2018, 14, 292–300, doi:10.1109/TII.2016.2618886. [CrossRef]
- Beşkardeş, A.; Hameş, Y.; Kaya, K. A Comprehensive Review on Fuzzy Logic Control Systems for All, Hybrid, and Fuel Cell Electric Vehicles. Soft comput 2024, doi:10.1007/s00500-023-09454-5. [CrossRef]
- Castaings, A.; Lhomme, W.; Trigui, R.; Bouscayrol, A. Energy Management of a Multi-Source Vehicle by λ-Control. Applied Sciences (Switzerland) 2020, 10, doi:10.3390/APP10186541. [CrossRef]
- Huseyin A. Yavasoglu; Chuan Shi, S.M.I.; Kursad Gokce Energy Storage Systems for EVs with Two Propulsion Machines; IEEE: Gebze, Kocaeli Turkey, 2017; ISBN 9781509039531.
- Tang, Y.; Xie, J.; Shen, Y.; Sun, S.; Li, Y. Energy Management Strategy Based on Model Predictive Control-Differential Evolution for Hybrid Energy Storage System in Electric Vehicles. IET Electrical Systems in Transportation 2024, 2024, doi:10.1049/2024/8840942. [CrossRef]
- Yulong, Z.; Weida, W.; Changle, X.; Hui, L.; Langari, R. Research and Bench Test of Nonlinear Model Predictive Control-Based Power Allocation Strategy for Hybrid Energy Storage System. IEEE Access 2018, 6, 70770–70787, doi:10.1109/ACCESS.2018.2876440. [CrossRef]
- Majeed, M.A.; Khan, M.G.; Asghar, F. Nonlinear Control of Hybrid Energy Storage System for Hybrid Electric Vehicles. International Transactions on Electrical Energy Systems 2020, 30, doi:10.1002/2050-7038.12268. [CrossRef]
- Hu, L.; Tian, Q.; Zou, C.; Huang, J.; Ye, Y.; Wu, X. A Study on Energy Distribution Strategy of Electric Vehicle Hybrid Energy Storage System Considering Driving Style Based on Real Urban Driving Data. Renewable and Sustainable Energy Reviews 2022, 162, doi:10.1016/j.rser.2022.112416. [CrossRef]
- Cui, Z.; Guo, Z.; Manthiram, A. Irreparable Interphase Chemistry Degradation Induced by Temperature Pulse in Lithium-Ion Batteries. Angewandte Chemie - International Edition 2023, 62, doi:10.1002/anie.202313437. [CrossRef]
- Ahsan, M.B.F.; Mekhilef, S.; Soon, T.K.; Usama, M.; Binti Mubin, M.; Seyedmahmoudian, M.; Stojcevski, A.; Mokhlis, H.; Shrivastava, P.; Alshammari, O. Optimal Sizing and Cost Analysis of Hybrid Energy Storage System for EVs Using Metaheuristic PSO and Firefly Algorithms. Results in Engineering 2024, 23, doi:10.1016/j.rineng.2024.102358. [CrossRef]
- Zheng, C.; Li, W.; Liang, Q. An Energy Management Strategy of Hybrid Energy Storage Systems for Electric Vehicle Applications. IEEE Trans Sustain Energy 2018, 9, 1880–1888, doi:10.1109/TSTE.2018.2818259. [CrossRef]
- Intidam, A.; Fadil, H. El; Nady, S.; Benzouina, O.; Koundi, M.; Rachid, K. Nonlinear Optimization Technique for Energy Management of HESS in Fuel Cell Electric Vehicle. In Proceedings of the IFAC-PapersOnLine; Elsevier B.V., 2022; Vol. 55, pp. 426–431.
- Mounica, V.; Obulesu, Y.P. An Energy Management Scheme for Improving the Fuel Economy of a Fuel Cell/Battery/Supercapacitor-Based Hybrid Electric Vehicle Using the Coyote Optimization Algorithm (COA). Front Energy Res 2023, 11, doi:10.3389/fenrg.2023.1180531. [CrossRef]
- Li, X.; Li, M.; Habibi, M.; Najaafi, N.; Safarpour, H. Optimization of Hybrid Energy Management System Based on High-Energy Solid-State Lithium Batteries and Reversible Fuel Cells. Energy 2023, 283, doi:10.1016/j.energy.2023.128454. [CrossRef]
- Ranjbaran, P.; Ebrahimi, J.; Bakhshai, A.; Jain, P. Reinforcement Learning-Based Approaches to Energy Management of Hybrid Energy Storage Systems in Electric Vehicles. In Proceedings of the Proceedings of the International Conference on Power Electronics and Drive Systems; Institute of Electrical and Electronics Engineers Inc., 2023; Vol. 2023-August.
- Shuai, Q.; Wang, Y.; Jiang, Z.; Hua, Q. Reinforcement Learning-Based Energy Management for Fuel Cell Electrical Vehicles Considering Fuel Cell Degradation. Energies (Basel) 2024, 17, doi:10.3390/en17071586. [CrossRef]
- Mukhcrjee, N.; Sarkar, S. A Deep Concurrent Learning-Based Robust and Optimal Energy Management Strategy for Hybrid Energy Storage Systems in Plug-in Hybrid Electric Vehicles. In Proceedings of the 2023 IEEE Vehicle Power and Propulsion Conference, VPPC 2023 - Proceedings; Institute of Electrical and Electronics Engineers Inc., 2023.
- Yavasoglu, H.A.; Tetik, Y.E.; Ozcan, H.G. Neural Network-Based Energy Management of Multi-Source (Battery/UC/FC) Powered Electric Vehicle. Int J Energy Res 2020, 44, 12416–12429, doi:10.1002/er.5429. [CrossRef]
- Jui, J.J.; Ahmad, M.A.; Molla, M.M.I.; Rashid, M.I.M. Optimal Energy Management Strategies for Hybrid Electric Vehicles: A Recent Survey of Machine Learning Approaches. Journal of Engineering Research (Kuwait) 2024. [CrossRef]
- Sun, H.; Tao, F.; Fu, Z.; Gao, A.; Jiao, L. Driving-Behavior-Aware Optimal Energy Management Strategy for Multi-Source Fuel Cell Hybrid Electric Vehicles Based on Adaptive Soft Deep-Reinforcement Learning. IEEE Transactions on Intelligent Transportation Systems 2023, 24, 4127–4146, doi:10.1109/TITS.2022.3233564. [CrossRef]
- Chen, T.C.; Ibrahim Alazzawi, F.J.; Grimaldo Guerrero, J.W.; Chetthamrongchai, P.; Dorofeev, A.; Ismael, A.M.; Al Ayub Ahmed, A.; Akhmadeev, R.; Latipah, A.J.; Esmail Abu Al-Rejal, H.M. Development of Machine Learning Methods in Hybrid Energy Storage Systems in Electric Vehicles. Math Probl Eng 2022, 2022, doi:10.1155/2022/3693263. [CrossRef]
- Sidharthan Panaparambil, V.; Kashyap, Y.; Vijay Castelino, R. A Review on Hybrid Source Energy Management Strategies for Electric Vehicle. Int J Energy Res 2021, 45, 19819–19850. [CrossRef]
- Zhang, Q.; Wang, L.; Li, G.; Liu, Y. A Real-Time Energy Management Control Strategy for Battery and Supercapacitor Hybrid Energy Storage Systems of Pure Electric Vehicles. J Energy Storage 2020, 31, doi:10.1016/j.est.2020.101721. [CrossRef]
- Li, S.; Hou, Z.; Chu, L.; Jiang, J.; Zhang, Y. A Novel Learning-Based Robust Model Predictive Control Energy Management Strategy for Fuel Cell Electric Vehicles. 2022. [CrossRef]
Figure 1.
(a) Composition of BT cell from current: Li-ion LFP type cell [18]; (b) A functional diagram of a FC of PEM type [19].
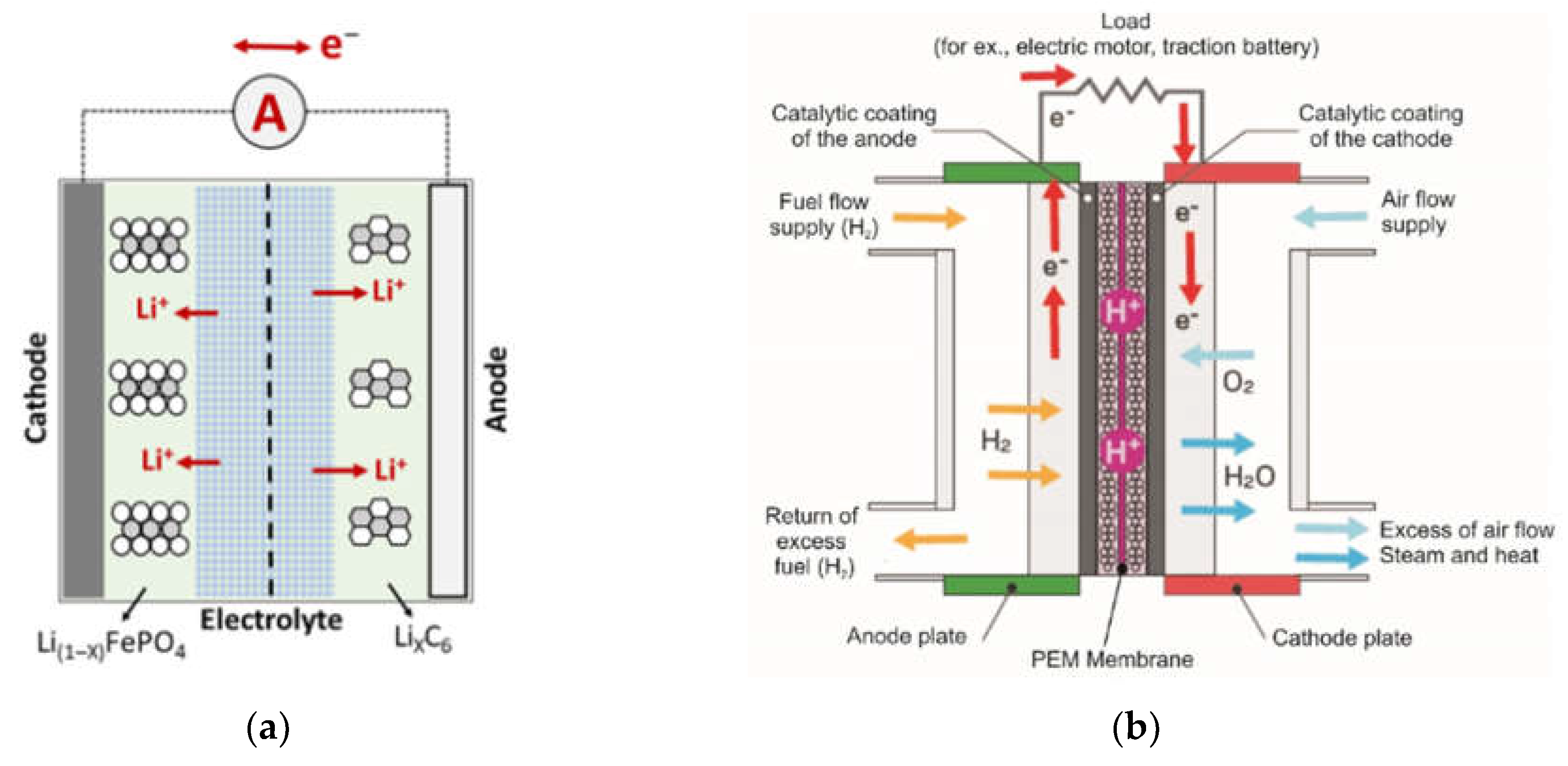
Figure 2.
Schematic representation of electrical double-layer capacitor (EDLC) [33].
Figure 2.
Schematic representation of electrical double-layer capacitor (EDLC) [33].
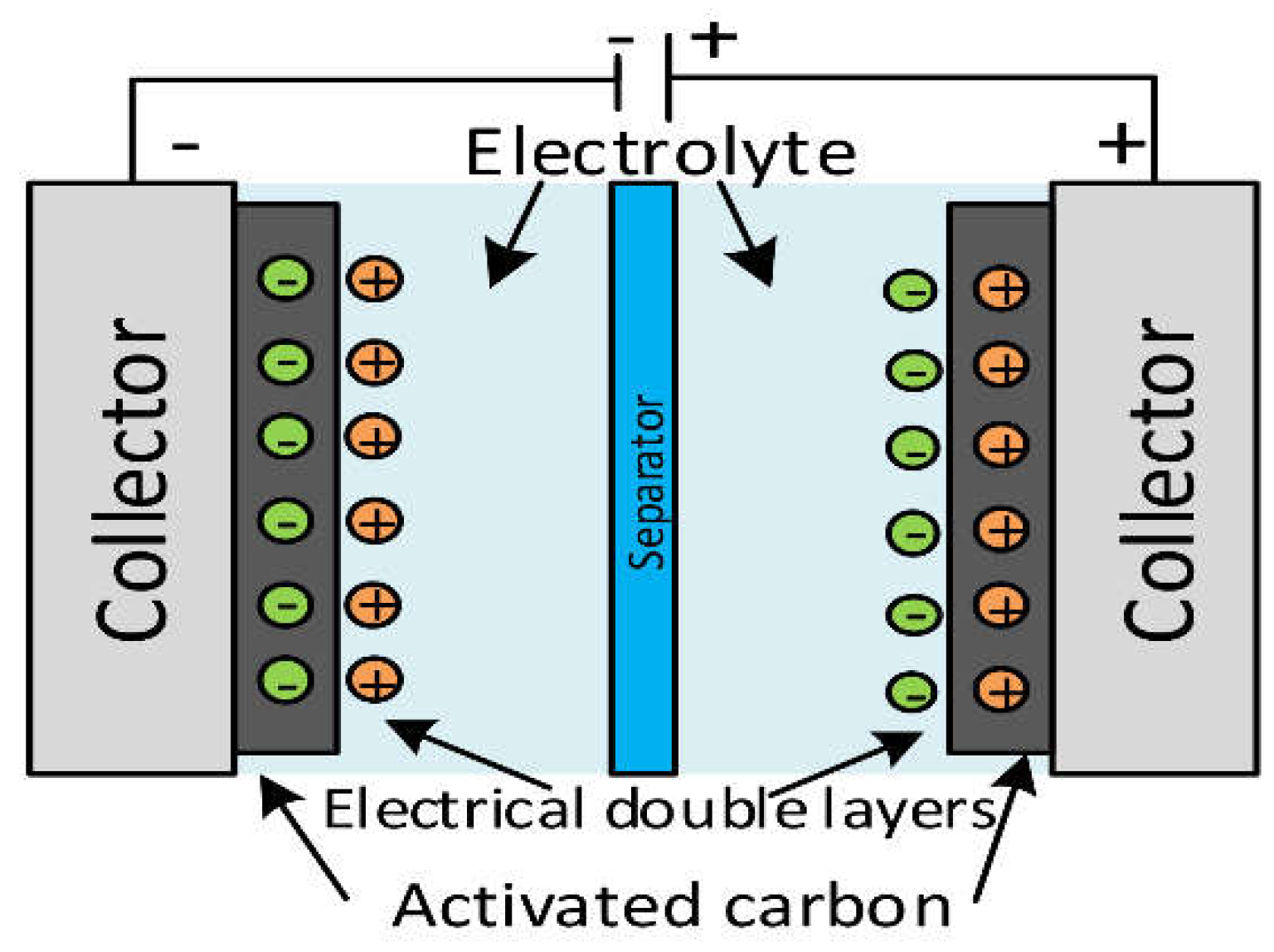
Figure 3.
(a) Structure and components of FW [39]; (b) Transmotor- FW powertrain system.
Figure 3.
(a) Structure and components of FW [39]; (b) Transmotor- FW powertrain system.
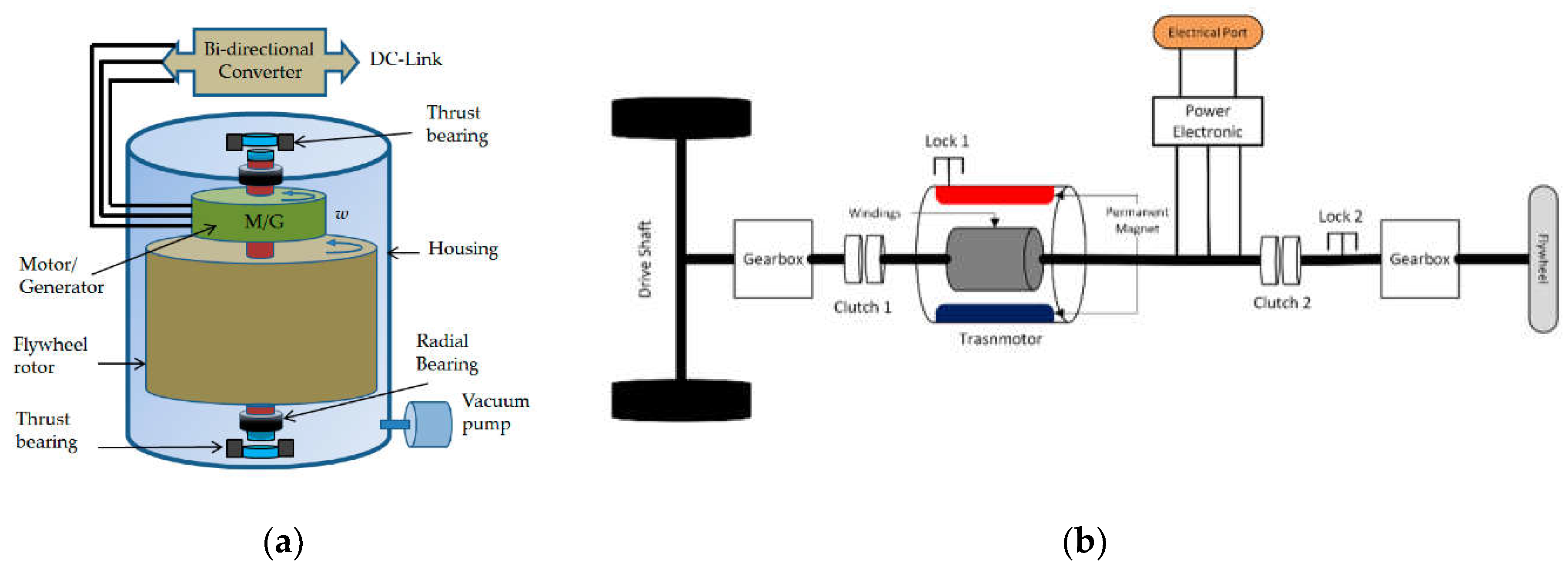
Figure 4.
(a) Passive cascade BT and SC configuration; (b) Active Cascade System (Active cascade UC/ BT configuration).
Figure 4.
(a) Passive cascade BT and SC configuration; (b) Active Cascade System (Active cascade UC/ BT configuration).
Figure 5.
(a) Active Cascade System with Reverse BT -SC Connectivity (Active cascade BT /UC configuration); (b) Parallel Passive Cascade System with Two DC–DC Converters.
Figure 5.
(a) Active Cascade System with Reverse BT -SC Connectivity (Active cascade BT /UC configuration); (b) Parallel Passive Cascade System with Two DC–DC Converters.

Figure 6.
(a) Multiple Converter Configuration; (b) Multi-Input Converter Configuration.
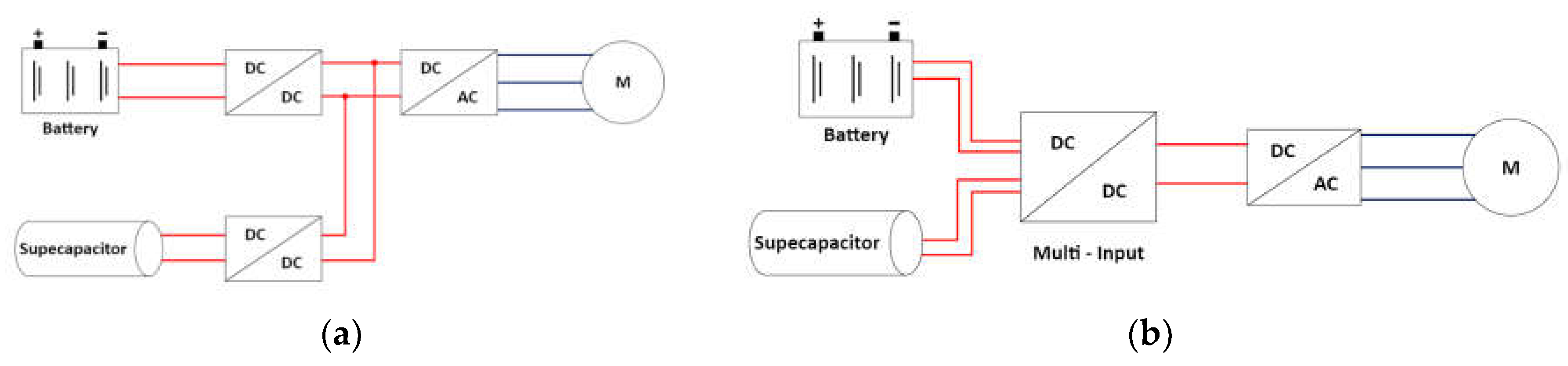
Figure 7.
(a) Direct Parallel Connection/Semi-active Topology; (b) Indirect Parallel Connection/Active Topology.
Figure 7.
(a) Direct Parallel Connection/Semi-active Topology; (b) Indirect Parallel Connection/Active Topology.
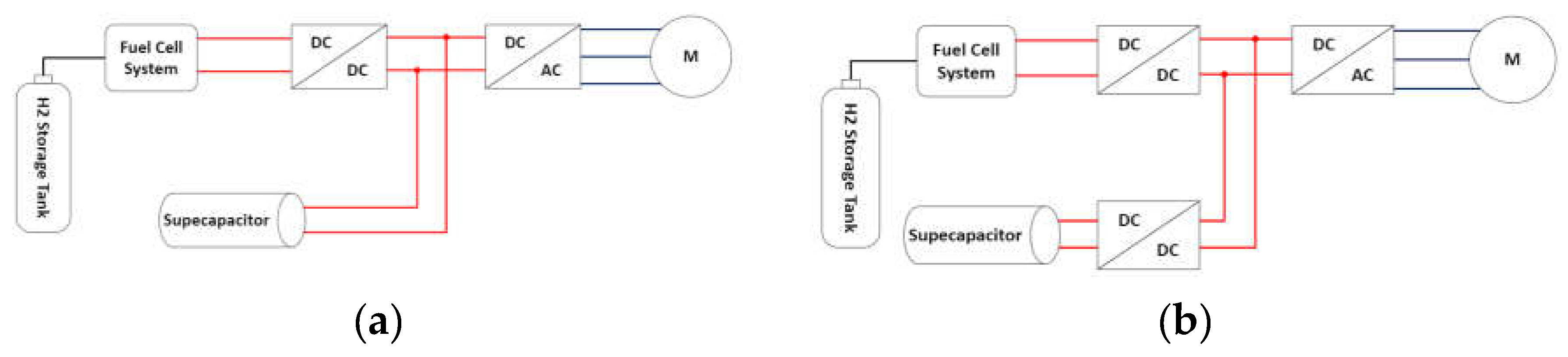
Figure 8.
(a) Direct parallel connection of FCs and BT; (b) Direct parallel connection of FC.
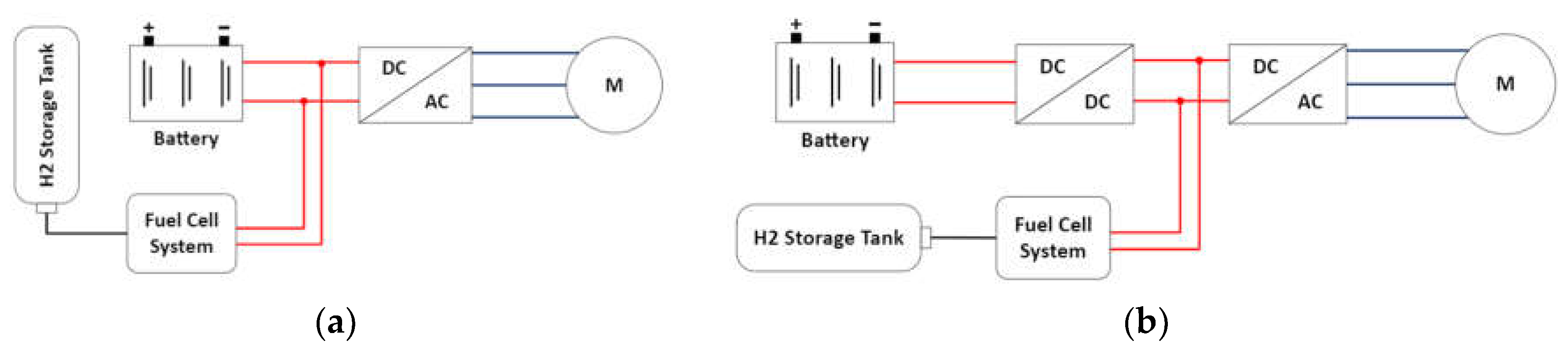
Figure 9.
(a) Direct parallel connection of BT; (b) Indirect parallel connection of FCs and BT.
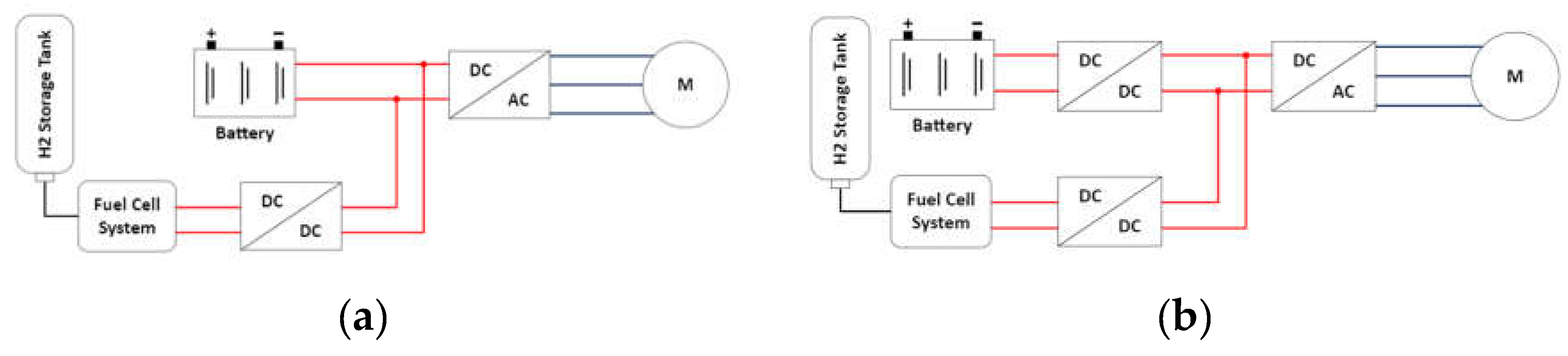
Figure 10.
(a) BT and FC parallel direct connection; (b) SC parallel direct connection.
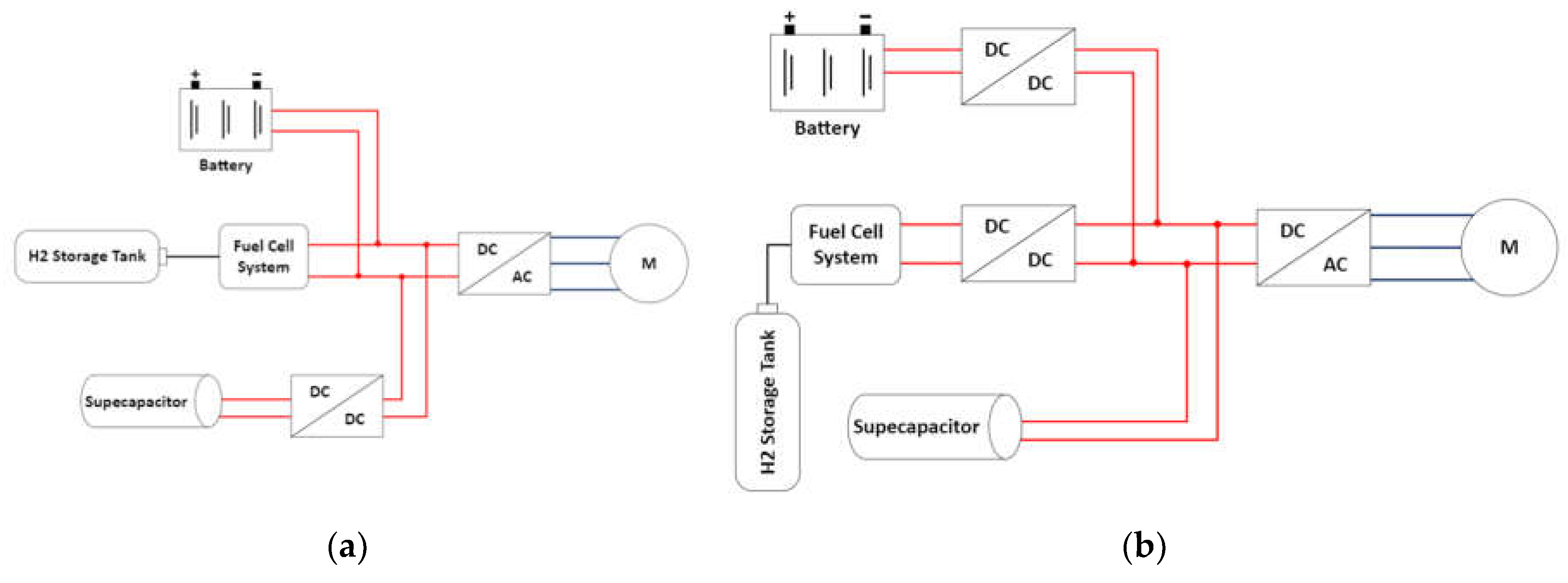
Figure 11.
(a) BT parallel direct connection; (b) Parallel indirect connection of BT, SC and FC.
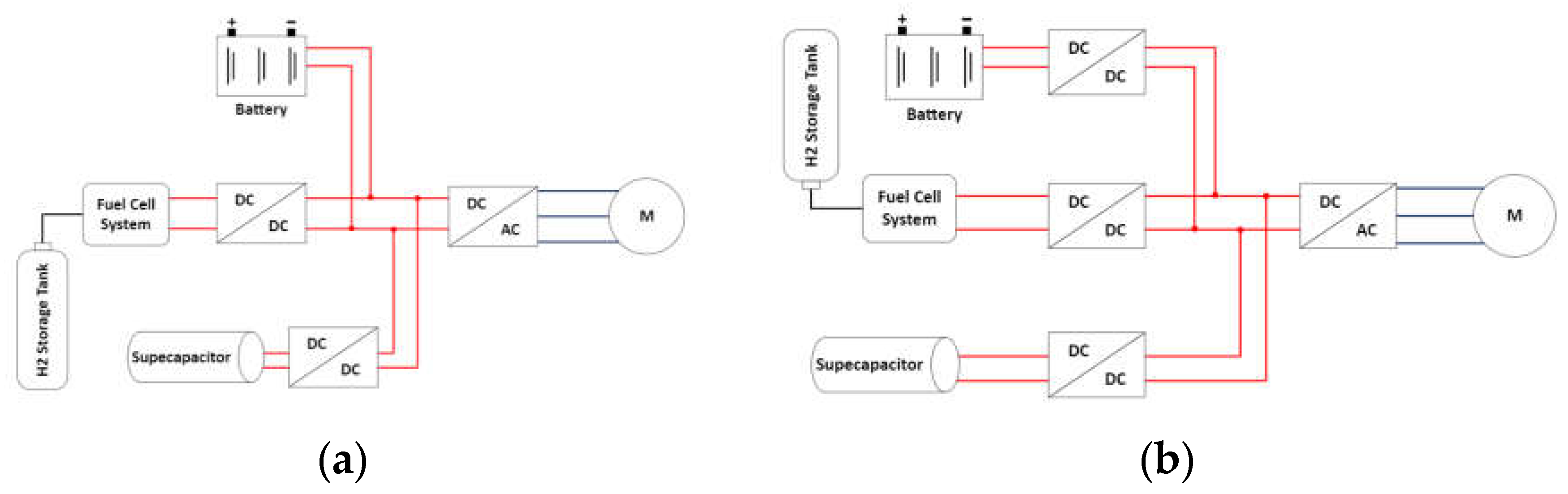
Figure 12.
Independent Control of Multiple FC Stacks in Hybrid Powertrain Topology.
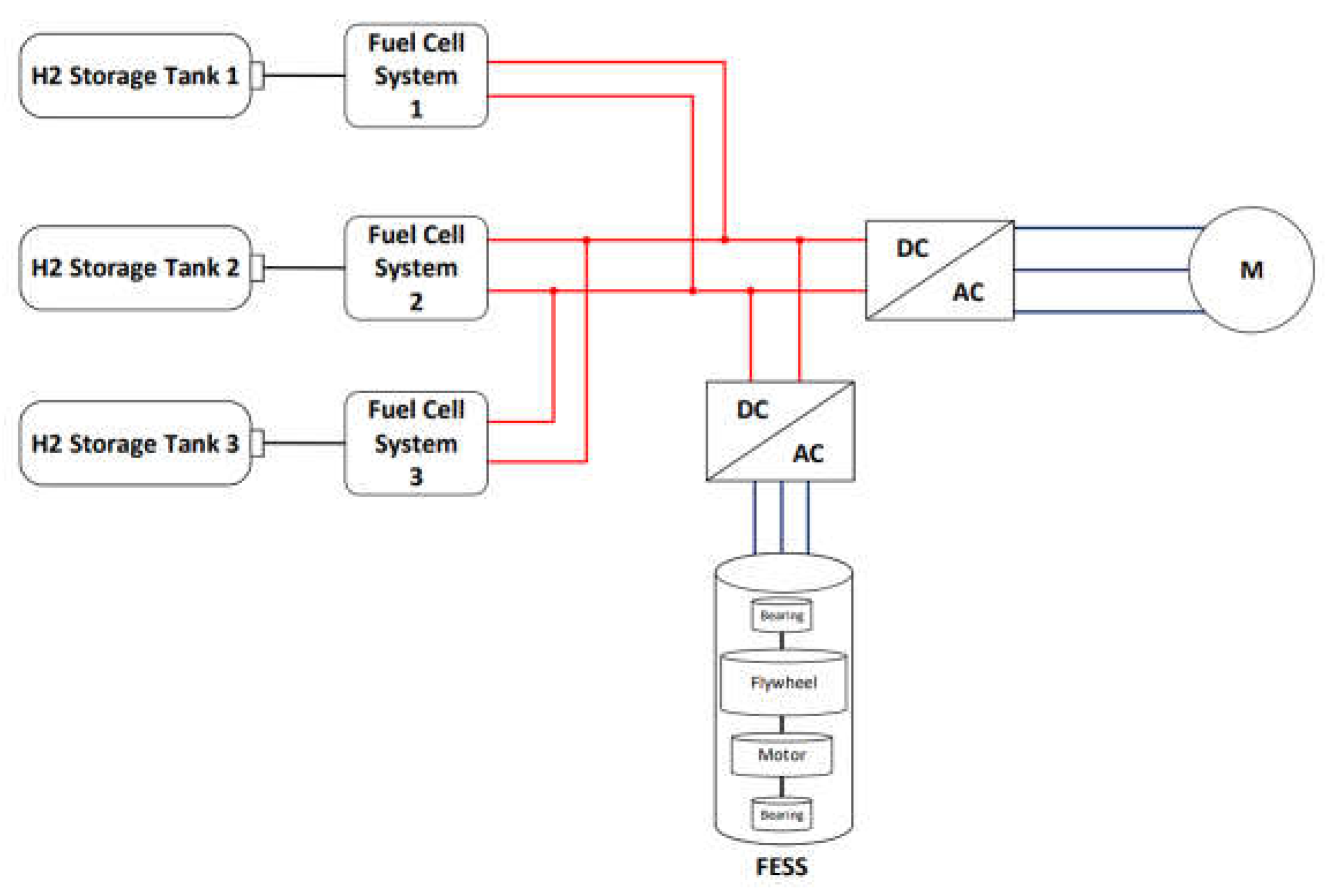
Figure 13.
Integrated Hybrid Power System with FC and FESS in Urban Transit Application.
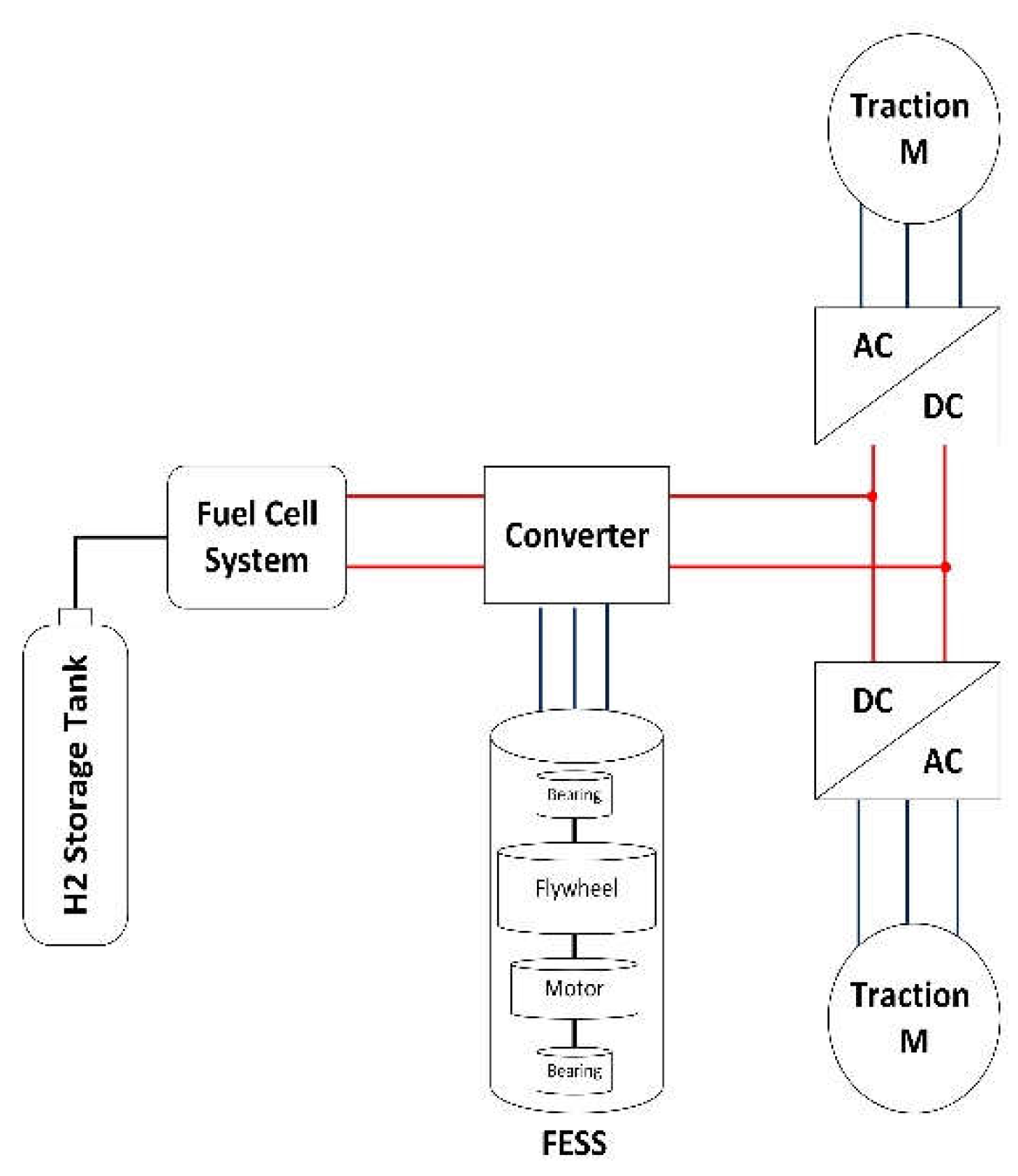
Figure 14.
EMS algorithms for multisource EVs categorization.
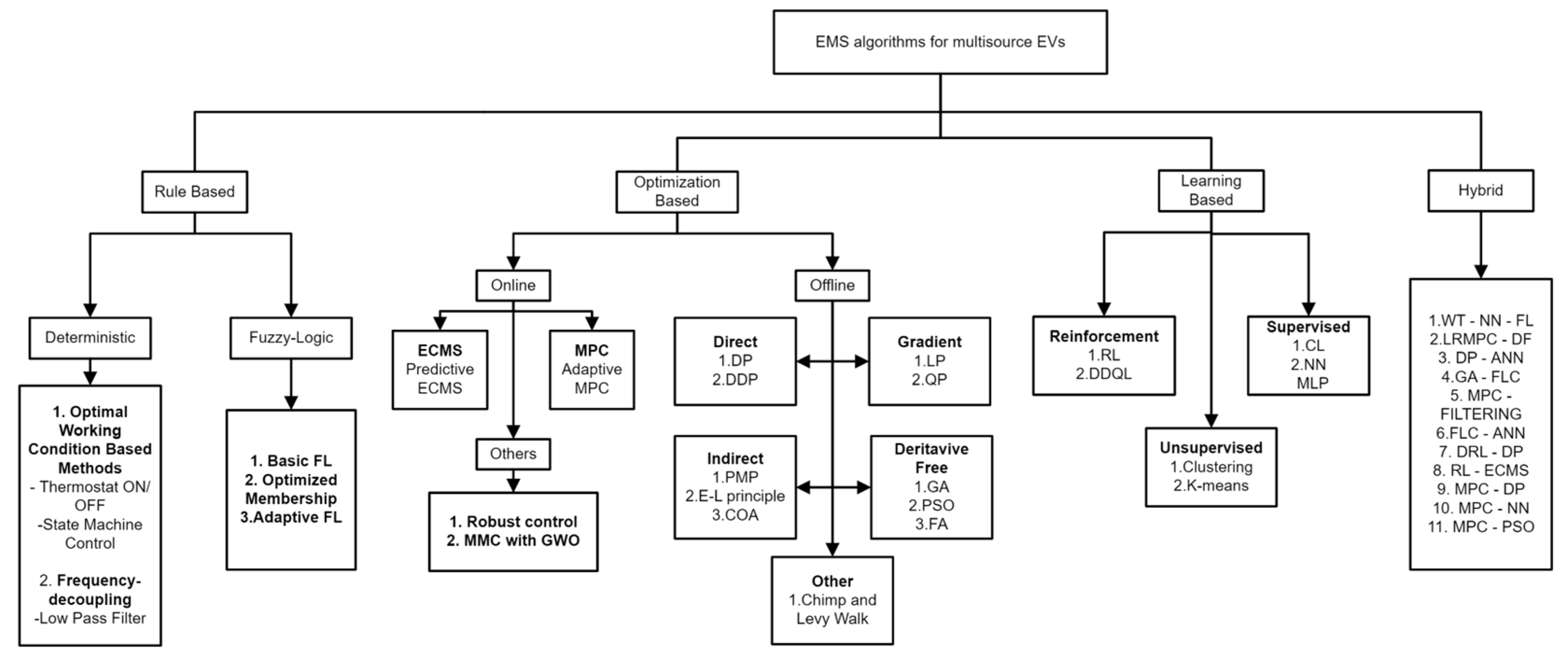

Table 1.
Summary of Hybrid Energy Storage Systems.
| Storage System | Advantages | Disadvantages | Power Source | Efficiency | Future Trends |
|---|---|---|---|---|---|
| BT [5,18,19,20,21,22,23,24] |
High energy density | High Production costs | Main | 80%+ depending on the technology [41] |
Solid state |
| Effective thermal management | Degradation over time | Nickel-Based | |||
| Availability | Safety risks | Metal-air | |||
| FC [8,26,27,29,30,42,43] |
High efficiency | Expensive due to platinum | Main | Up to 60% | Development of alternative catalysts |
| Longer lifespan than BTs | Slow response time | Scaling up green hydrogen | |||
| Instant resupply | No support of regenerative braking | ||||
| FW [1,7,8,12,26,31,32,34,35,36,37] | High efficiency | High-strength materials required | Supplementary | Up to 85% | Improvement in materials and integration techniques |
| Low maintenance | Complex integration | ||||
| Durability | Safety concerns with high-speed rotation | ||||
| Ideal for regenerative braking | |||||
| SC [10,12,26,38,39,40] |
High power density | Low energy density | Supplementary | Approx. 70-85% [44] | Increasing electrode surface area |
| Fast charge/discharge | High costs | New materials |
Table 2.
Power Flow of Transmotor-Based Powertrain [45].
Table 2.
Power Flow of Transmotor-Based Powertrain [45].
| Scenario | Inner Rotor Speed (FW) | Outer Rotor Speed (DS) | Speed Command | Transmotor Role | Power Flow Direction | BT Status |
|---|---|---|---|---|---|---|
| A. Acceleration | Faster | Slower | Increase | Generator & Clutch | Mechanical (FW) -> Electrical (BT) & Mechanical (FW) & Mechanical (DS) | Charging |
| B. Acceleration | Slower |
Faster | Increase | Electric Motor & Clutch | Electrical (BT) -> Mechanical (DS) | Discharging |
| C. Deceleration | Slower | Faster | Decrease | Generator & Clutch | Mechanical (DS) -> Electrical (BT)Mechanical (DS) -> Mechanical (FW) | Charging |
| D. Deceleration | Faster | Slower | Decrease | Electric Motor & Clutch | Mechanical (DS) -> | Charging |
| Electrical (BT) |
Table 3.
Summary of Topologies of BEVs and FCEVs.
| EVs | Power Sources Involved | Topology name | Advantages | Disadvantages | Comments |
|---|---|---|---|---|---|
| BEV [7] |
BT-SC [8,13,26,40,50,51,52,53] |
Passive Cascade BT and SC configuration | Enhanced power performance capability | Significant voltage fluctuations at SC terminals | Inefficient utilization of stored energy in SCs, complex control needed. |
| Active Cascade System | Allows for better maximum power output | Frequent BT charging/discharging cycles, inefficient SC energy storage | Enhances system's power capability but increases wear on BTs. | ||
| Active Cascade System with Reverse BT -SC Connectivity | Efficient control of BT current, reduces BT's capacity requirements | Impossible BT charging from braking energy or from the SC | Provides more efficient control, though limits regenerative capabilities. | ||
| Parallel Passive Cascade System with Two DC-DC converters | Separate control of power flow, enhances flexibility | Requires additional components, increasing complexity and cost | Offers individual control over BTs and SCs. | ||
| Multiple Converter Configuration | Individual control of power flow to each storage unit | High cost, increased complexity | Promising if cost is reduced | ||
| Multi-Input Converter Configuration | Reduces costs and weight, enhances performance | More complex control strategy needed | Common inductor used for all energy sources to manage power flow | ||
| Proposed Hybrid ESS Configuration | Covers maximum power demands with higher-voltage SC, efficient energy distribution during various driving conditions | Relies heavily on control strategy for efficiency | Operates in four modes: low power, high power, braking, and acceleration, optimizing power and energy use | ||
| FCEV | FC-SC [7,12,26,53,57,58,59,60] |
Direct Parallel Connection/Semi-active Topology | Simplifies circuitry, enhances response times | Potential for voltage mismatch, instability | Cost-effective, no DC/DC converter needed |
| Indirect Parallel Connection/Active Topology | Voltage regulation, stable system voltage | Increases system complexity, higher cost | Uses DC/DC converters for precise control | ||
| FC-BT [7,51,58,59,60,61,62] |
Direct Parallel Connection of both | Efficient average load management | Lack of control over BT and FC may reduce efficiency | Simple control strategy, direct connection crucial for rapid changes | |
| Direct Parallel Connection of FC | Manages DC-link voltage, reduces variability | FC regulates DC-link voltage, leading to potential performance issues | DC/DC converter facilitates energy capture from braking | ||
| Direct Parallel Connection of BT | Stabilizes DC-link voltage, enhances powertrain efficiency | Does not support energy capture from regenerative braking | Direct connection stabilizes voltage but stresses BT | ||
| Indirect Parallel Connection of both | Dynamic balance of power among SoC, regulates DC-link voltage | Highly sophisticated control strategy required, most costly | Supports regenerative braking, maintains performance despite failures | ||
| FC-BT-SC [7,12,51,59,60,62,63,64] |
BT and FC Parallel Direct Connection: | Streamlines power management for average loads | Simplistic approach may not yield optimal efficiency | Focuses on managing rapid changes in power demand | |
| SC Parallel Direct Connection | Immediate power for dynamic demands, protects BT and FC | More complex power electronics Sophisticated control required |
Enhances energy recovery from braking, improves overall efficiency | ||
| BT Parallel Direct Connection | Enhances stability of power supply | Limited support for dynamic power management | Prioritizes steady-state and low dynamic loads | ||
| Parallel Indirect Connection of BT, SC and FC | Comprehensive management of energy sources | Requires advanced control systems, increased cost | Maximizes efficiency through sophisticated energy management | ||
| FC-FW [65,66,67,68] |
Independent Control of Multiple FC Stacks in Hybrid Powertrain Topology | Manages load variations effectively, captures braking energy | Complexity in integration, high-speed rotation safety concerns | Reduces FC size, optimizing efficiency | |
| Integrated Hybrid Power System with FC and FESS in Urban Transit Application | Optimizes power usage, reduces operational costs | High initial investment and maintenance expenses | Suitable for applications requiring frequent stops and starts |
Table 4.
Summary of EMS algorithms.
| Algorithm Strategy | Learning Approach |
Specific Technique | Advantages | Disadvantages | Comments |
|---|---|---|---|---|---|
| Rule Based | Deterministic [5,57,59,60,71,72,73] |
Optimal working condition based. | High precision in optimal conditions. | Less flexibility, poor at handling unexpected conditions. | Suitable for predictable operations. |
| Frequency Decoupling. | Effective in frequency insolation. | Can be complex to implement. | Enhances control precision but requires detailed parametric adjustments. | ||
| Fuzzy-Logic [5,50,75,76,77,78] |
Basic Fuzzy Logic | Simplifies control, robust to variations. | May not capture complex dynamics. | Used for less complex dynamic systems. | |
| Optimized Membership | Enhances accuracy with tailored functions. | Computationally intensive. | Best for environments that evolve over time. | ||
| Adaptive Fuzzy Logic | Adjusts to dynamic changes, improves with experience. | High cost, increased complexity. | Promising if cost is reduced. | ||
| Optimization Based | Online [52,60,81,82,83,84,85,86] |
ECMS | Real-time optimization of control strategies. | Requires continuous adjustment. | Suitable for dynamic and real-time applications. |
| MPC | Considers future states for decision making. | Computationally intensive. | For systems where future planning is critical. | ||
| Others | Allows for bespoke solutions. | May lack general applicability. | Suitable for unique or niche scenarios. | ||
| Offline [5,88,89,90,91,92] |
Direct | Simplifies problem to direct solutions. | May overlook long-term consequences. | Used for simpler dynamic systems. | |
| Indirect | Can handle complex problems. | Indirect methods may be slower and less intuitive. | Useful for complex operational models. | ||
| Gradient | Efficient path to optimum. | Sensitive to initial conditions. | Requires smooth problem formulations. | ||
| Derivative free | Useful where derivatives are not available. | Often slower and less accurate. | Used where analytical gradients are not available. | ||
| Other | Flexibility in approach. | May not be as well-optimized. | For specialized or less common scenarios. | ||
| Learning based | Supervised Learning [5,60,93,95,100] |
CL | Effective for feature competition and selection. | Requires specific problem structuring, high computation. | Ideal for tasks needing refined feature selection. |
| NN | Excellent for capturing nonlinear relationships in data. | Requires large amounts of data, prone to overfitting. | Suitable for pattern identification and complex modeling. | ||
| Unsupervised [5,60,78,93,96,100] |
MLP | Suited for deep learning tasks. | Computationally intensive. | Used for hierarchical feature extraction | |
| Reinforcement FC-FW [5,60,78,93,94,98,100] |
RL | Adapts based on reward feedback, good for dynamic policies. | Converges slowly, requires significant interaction. | For environments where decision-making is critical. | |
| DDQL | Reduces overestimation of action values. | Complex architecture, needs careful tuning. | Enhances stability and performance in deep RL scenarios. | ||
| Hybrid | Combination [100,101,102] |
1.WT - NN – FL 2. LRMPC – DF 3. DP – ANN 4.GA – FLC 5. MPC - FILTERING 6.FLC – ANN 7. DRL – DP 8. RL – ECMS 9. MPC – DP 10. MPC – NN 11. MPC - PSO |
Integrates strengths of multiple techniques. | More complex to configure and optimize. | For tasks requiring robust, adaptable solutions. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



